
Submitted:
27 August 2024
Posted:
28 August 2024
You are already at the latest version
Abstract
In this study, we investigate different control scenarios through theoretical analysis and numerical simulations. To account for two important types of control for an early ascending stage of an outbreak, social distancing and treatment with antiviral medications, a compartmental model is considered with one control, $u_1(t)$, aimed to lower the disease transmission rate and the other control, $u_2(t)$, aimed to lower the period of infectiousness. In all experiments, the implementation of control strategies reduces the daily cumulative number of cases and successfully "flattens the curve". The reduction in the cumulative cases is achieved by eliminating or delaying new cases. This delay is incredibly valuable as it provides public health organizations with more time to advance antiviral treatments and devise alternative preventive measures. The main theoretical result of the paper, Theorem 3.1, concludes that the optimal control functions, $u_i(t)$, $i=1,2,$ may be increasing until some moment $\tau \in [0, T)$. However, for all $t \in [\tau, T]$, both controls, $u_i(t)$, decline as $t$ approaches $T$ (possibly causing the number of newly infected people to grow). Numerical simulations presented in Section 4 confirm theoretical findings, which indicates that, ideally, around the time $t=\tau$, the control strategy has to be upgraded and a vaccination campaign needs to start to ensure the epidemic wave does not rebound.
Keywords:
Epidemiology
; compartmental model
; transmission dynamic
; optimal control
1. Introduction
Advanced modeling and parameter estimation algorithms form a solid background for the design of optimal strategies to control infectious diseases, which reduces illness and mortality rates. Vaccination, isolation, and public health education are examples of important control techniques that protect people at risk and make effective use of healthcare resources [1,2,3].
Timely control measures can mitigate the impact of outbreaks, prevent widespread transmission, and save lives. For instance, vaccination programs have been instrumental in controlling diseases such as measles, polio, and influenza [4,5]. Quarantine and isolation protocols were key in managing the spread of diseases like Ebola and COVID-19 [6]. Public health campaigns promoting handwashing and sanitation have significantly reduced the transmission of diseases such as cholera and dysentery. The eradication of smallpox is a prime example of how global vaccination campaigns can lead to complete elimination of a disease [7]. Similarly, the rapid response to the H1N1 influenza pandemic in 2009, including the development and distribution of vaccines, helped to control the spread of the virus and reduce its impact [8].
By analyzing data that use different models and algorithms, epidemiologists can forecast future incidence cases and evaluate various control strategies. Systematic preventive measures can help in reducing the spread of diseases. At first glance, choosing healthcare policies seems obvious, but in reality it is a very complicated task. One needs to put forward control strategies that are practical and, at the same time, have manageable consequences. At the onset of COVID-19, lockdowns were helpful, but they were not sustainable long term [9,10,11]. Thus, choosing the best intervention at the right time is critical [12,13].
The study in [14] introduced a two-stage epidemic model for the spread of COVID-19 and proposed optimal control strategies based on actual data and cost considerations. The research underscores the importance of contact tracing and isolation in minimizing the costs and effectively curbing the spread of a disease. Numerical simulations and model analysis provide actionable recommendations for public health authorities, highlighting the critical role of controlling the transmission rate in epidemic management.
The research in [15] modeled the spread of COVID-19 and assessed the impact of social intervention measures during the early outbreak phase, focusing on optimal control strategies and the identifiability of model parameters. It found that optimal control strategies, especially social distancing and self-isolation, significantly reduced transmission rates when implemented early. The study emphasized the importance of structural identifiability for accurate parameter estimation in COVID-19 models. It shows that implementing control measures effectively "flattens the curve" and lowers the burden on healthcare systems.
Another study, [16], focused on an model with saturated incidence and treatment rates, analyzing equilibrium points, bifurcation, and optimal control strategies that utilize vaccination and treatment with antiviral medication in order to contain the outbreak. The authors’ findings, derived from numerical simulations and efficiency analysis, demonstrated that vaccination control stands to reduce the cumulative number of infections more rapidly than control by antiviral treatment. This research underscored the value of mathematical modeling in epidemiology and the strategic implementation of vaccination to prevent disease transmission.
2. Control of an Emerging Disease
In the study of epidemic control, effective management of a disease spread is crucial, particularly at the onset of an outbreak. While the importance of vaccination in fighting infectious diseases is undeniable, it takes time to develop a vaccine for an emerging strain. Various parameters including environmental factors, immunity patterns, and behavioral changes impact the circulation of a virus. Social distancing and personal hygiene measures (non-medical interventions) play an important role in containing the disease at an early ascending stage. By optimizing the implementation of non-medical interventions over time the effectiveness of these interventions can be increased.
Another essential component of control and prevention is treatment with antiviral medications, which allows to reduce the period of infectiousness and/or reduce the disease fatality rate. To account for these two important types of control, we consider the following (Susceptible-Infectious-Removed) model [17] for early disease transmission:
In system (1), we assume that individuals who have recovered from the disease gain immunity for the duration of the study and do not return to the susceptible class, . Additionally, we assume that natural birth and death rates balance one another and the removed class, , contains individuals who recovered from the disease and those who died. The two disease parameters, and are transmission and recovery rates, respectively.
The focus of this research is on introducing optimal controls during initial weeks of a pandemic in order to delay and reduce the daily number of infections. This approach enables health centers and decision-making organizations to implement more effective operations. In what follows, we incorporate two different kinds of control in model [18] resulting in the system , where
Here , , and are normalized susceptible, infected and removed compartments, respectively, and N is the population of the region at the beginning of the study period. The function represents nonmedical controls (social distancing, remote work, online education, restriction on travel, lockdowns, etc.), while stands for treatment with antiviral medications and other medical interventions. A positive parameter, , is the efficacy of antiviral treatments [19]. In the above, , , and the admissible set for each control function is
In (2), the first control, , aims to change the disease transmission rate from to while the second control, , is expected to reduce the period of infectiousness, which is in the initial system (1). In combination, the two controls, and , are meant to minimize the force of infection, , while keeping the costs at bay. The costs are considered in a general sense, which includes a negative impact on mental health, education, economy and on overall quality of life.
In Lemma 2.1 below we show that following the introduction of a time-dependent transmission rate, , and a time-dependent recovery rate, , the model in (2) remains well-defined in the sense that the state variables, originating in a positive octant do not leave the octant for all values of . The proof of this lemma is similar to the argument in [20], where system (2) was considered with nonmedical controls only (that is, ).
Lemma 2.1 [20]. Let , be admissible control trajectories with satisfying given by (2) and
the probability simplex in . Then for all .
Note that the argument in [20] implies that the conclusion of Lemma 2.1 is not limited to and . It is valid for any integrable nonnegative functions and . To optimize the implementation of both controls, and , we consider the following objective functional
According to system (2), one can integrate the first term to obtain
where is the assumed cost of control and , , is the regularization parameter (weight). As our numerical experiments show, the choice of the cost function, , significantly influences the resulting control strategy. From practical standpoint, neither nor should take negative values. At the same time, the cost, , must increase dramatically as approaches 1, the upper bound of the feasible set (3), since it is impossible to entirely eliminate the disease transmission . It is equally impossible to reach full capacity of antiviral treatment () due to limitations of testing and other factors. Therefore, in our approach we impose the following assumptions on the cost functions, and [20]:
These assumptions on the cost of control were first proposed in [20] for a special case when . The authors of [20] employed the techniques of machine learning to show that under assumptions (5), the global minimum of the Hamiltonian gives rise to the optimal control strategy, , which stays within the feasible set (3) for all values of . Assumptions (5) are the alternative to a more traditional cost function, , that is often used in control literature. However, does not, generally, prevent the global minimum from becoming greater than 1 for some values of t, even for large weights,
3. Theoretical Study and Discussion
In this section we state and prove our main theoretical result.
Theorem 3.1. Let be an optimal control strategy with respect to the objective functional defined in (4) and biological model , , introduced in (2), with satisfying (5) and , . Then there is such that for any , the derivative, , exists and . In other words, there is such that for any , both optimal controls, and , are decreasing.
Proof. According to the Pontryagin’s Minimum Principle [21,22], if is an optimal control with respect to the objective functional and the system , , then there is a trajectory such that
By the properties (5) of the cost, , one has for and , which prevents any , , from being the optimal of with respect to at any time . Therefore, the Karush–Kuhn–Tucker (KKT) conditions for the optimal control problem (2), (3), (4) take the form
As it follows from (2), (4), and (7),
which yields
To show that on some the derivative, , exists and , we follow [20]. Conditions (K2) and (K3) imply that is differentiable and therefore continuous for any . From Lemma 2.1, one concludes that as long as and are positive. On the other hand, since , there is such that for all . Suppose at some point , the Lagrange multiplier, , is greater than zero. Then from (K4) it follows that . By (5), this implies , which means that in (14) , while . Hence, we arrive at the contradiction. Therefore, for any , one has and . By implicit function theorem, for the derivative, , exists and
Taking into consideration (2), (4), and (7), one obtains
Furthermore, from (4) one gets . This together with (16) implies that and the costate equations for and take the form:
Combining (2) and (17), one can rewrite as follows
From (24) and (15), one concludes
Since and , , for , there exists such that and for all . Let , then is negative in As noted above, , therefore identity (14) yields
Taking into account (17), one arrives at
Integrating (21) from t to T and substituting , one gets
As shown above, is negative on . Thus (3) and (22) imply that for all . Using the same argument as in the case of , one can now conclude that in (20) is equal to zero on , that is, the constraint is not active for and . By implicit function theorem, for the derivative, , exists and
From (2) and (17) one has
since for all and . This implies in , which completes the proof. □
Remark 3.2 By (5) and (7), . Therefore, is positive definite and has a unique global minimum with respect to . From the proof of Theorem 3.1, it follows that both coordinates of the global minimum, and , are guaranteed to be less than 1, pointwisely, but they are not guaranteed to be greater than 0 necessarily, which means the solution to our optimal control problem can be a local minimum rather than global. The reason the coordinates of the global minimum, , , can potentially be less than zero for some values of t is that, counterintuitively, a smaller effective reproduction number, , in the SIR model does not always imply a smaller cumulative number of infected people, . Hence, even though for system (2), the effective reproduction number, , goes down with more control, it does not guarantee that yields for every value of t. One can, however, show that if and is non-increasing, then . This result is important in its own right. Its proof is given in Appendix.
Remark 3.3 Despite the fact that, theoretically, the solution to our optimal control problem can be a local minimum rather than global, in all numerical experiments presented in the next section, the optimal strategy is a unique global minimum. In other words, in all our experiments, the optimal control has been computed from the first-order necessary condition for unconstrained minimization, and nonnegativity constraints held without being enforced. For all cost functions, , satisfying (5), the global minimum of with respect to has nonnegative coordinates, , . That is, is equivalent to for all This illustrates that conditions (5) lead to a practically justified mitigation scenario. Numerical simulations have also confirmed, as proven in Theorem 3.1, that both controls, and , are decreasing toward the end of the study period.
4. Numerical Experiments
In our numerical study, we use a second-order trust-region algorithm for nonlinear optimization ’lsqnonlin’ combined with ode15s built-in function to approximate the solution to optimal control problem (4) subject to compartmental model (2) and costate system (17). For every value of , we solve system (2) forward in time (starting with ), to get using ode15s. Then system (17) is solved back in time by ode15s to obtain . Given , we find by applying a second-order trust-region ’lsqnonlin’ algorithm.
Following [20], we consider three different cost functions, , , and satisfying conditions (5):
In (26), the coefficients are chosen to minimize the weighted distance [20]
The cost of control, , , and , is infinite as u approaches its ultimate value, 1. For comparison, we also use the cost function , for which (5) does not hold. The cost function is popular in applications of control theory in epidemiology and other fields, since for this function the first order optimality condition is linear with respect to u. This is a useful property that simplifies numerical algorithms. However, the cost of control, , is finite at , which is not realistic in real-world scenarios. Figure 4 and Figure 7 show that the global minimum, , of the Hamiltonian, , does not stay in the range of if the cost is given by , especially for small values of , . Thus, an explicit constraint must be imposed in the case of . Even with the constraint , the optimal control function, , often reaches the ultimate level [15], , which is not practical.
In all numerical experiments presented in this section, , . Therefore, moving forward, we omit the first index and set . Comparison of the four cost functions in the interval is illustrated in Figure 1.
In this study, numerical simulations are conducted for and equal to , , , and . Three different scenarios are explored. First, there is only non-medical control, , (social distancing, behavioral changes, hand washing, etc.) in the system and treatment with antiviral medications, , is not available. Second, only control , treatment with antiviral medications, is applied; no social distancing. And third, controls and , medical and non-medical, are used in combination. In our experiments, the population of the region, N, is assumed to be . The initial number of infected individuals on day 1 is 200, and the duration of the study period is 120 days. Transmission rate, , and recovery rate, , are assumed to be , and , respectively, leading to the basic reproduction number . The efficacy of antiviral medication, , is assumed to be when applicable.
4.1. Scenario 1: Social Distancing Control Only
In the first scenario, only one (non-medical) control, , is applied (Figure 2, Figure 3, and Figure 4). As one can see in the figures, when the weight of control, , increases, the effectiveness of control goes down; see also Table 1 that illustrates how changes over time for the cost with different values of (find similar Tables for , , and in the Appendix). One can conclude from Figure 2 that control works by eliminating some cases but also by delaying some of them. Therefore, even though the cumulative number of infections in the controlled environment is significantly less than in the environment with no control, towards the end of the study period the daily number of infected individuals in the controlled environment may be higher.
4.2. Scenario 2: Control with Antiviral Medication Only
For the next set of experiments, it was assumed that there is only control in the system. In Figure 5, Figure 6, Figure 7, one can see the effect of the weight, , on different cost functions and, as the result, on state variables , , and over time. Again, as the weight, , decreases the control plays a more effective role in reducing the number of infected people (See Table 2, Table A16, Table A17, and Table A18 for more details).
Overall, the effects of controls and on the system, when only one control is applied, are similar. However, as one can clearly see from Table 3, for the same cost and over the same time interval, control suppresses infections more aggressively than . Also, there is a significant difference between the results for cost function and the rest of the cost functions. While for , , and the maximum number of infected people on any given day in the case of "first control only" is , this number is for . Additionally, in the case of "second control only", the maximum daily number of infected individuals for exceeds the maximum daily number for other cost functions by cases. The best performance among all cost functions can be attributed to in both cases where only control or only control is applied. For details, one can see Table 3 and Figure 8.
4.3. Scenario 3: Non-Medical and Medical Controls in Combination
For the next step, we apply two controls to the system, and , together with the same weights, , in order to evaluate their effect on the outbreak (See Figure 9, Figure 10, and Figure 11). As expected, in terms of its dependence on , the combination of two controls, and , behaves pretty similar to the case of one control in a sense that when the weight, , decreases, the controls become more effective, and the daily number of infected humans goes down.
Table 4 and Table 5 show the daily number of infected individuals, , and the cumulative number of infected individuals up to day t, , for different control scenarios. This gives an insight into how the two controls, and , compare individually and in combination subject to the same cost, , and the same weight, .
Table 5 illustrates that the cumulative number of infections after applying both controls for 120 days is , while the "no control" counterpart is . And in the case of control with antiviral medication, , after 120 days there are more than 3 times fewer cases as compared to the case of social distancing control, ( vs. ). Similar tables related to the cost functions , , and can be found in Appendix (Table A1 - Table A6).
In the next series of experiments, controls and have different weights, and , applied to their respective cost functions. We consider two cases. First, for the cost function , the weight of control is less than the weight of control (). Table 6 shows changes in daily numbers of infected people, , for the cost function , in the case of fixed weight () for control and different weights for control (Table A7 - Table A9 for cost functions , and can be found in Appendix). As it follows from Table 6, adding the second control, , with any weight, , helps to better contain the outbreak and to decrease the daily number of infected people and the cumulative number of cases. Even for high effort case of , the number of daily infections is cases less than the daily number of infected individuals in case when there is no control . However, when the weight of the second control, , increases, the effort required to implement that measure also rises, making it increasingly challenging to execute.
If the roles are reversed, that is, for the cost function , the weight, , of the second control, , is fixed and the sensitivity of the system to the first control, , is observed, the pattern is similar. Namely, adding a non-medical control, , reduces the daily number of infected people. Even though it is not as consequential as in the case when control is added, still there are fewer infected people in all cases with two controls as opposed to the case of only. At the same time, it is evident that the second control, , is more efficient. Indeed, for the high effort case of , the number of daily infections is only cases less than the daily number of infected individuals in case when there is no control (as opposed to reduction when was added with the same effort, ). The difference in the daily number of infected individuals between the case of no (i.e., only with weight ) and the case of with and with varying weights ranges from to . See Table 7, Table A10, Table A11, and Table A12 for more details.
Figure 13 and Figure 14 show the behavior of controls and their effect on the graphs of for different cost functions and different weights. As it is evident from the graphs, when and , the second control, , is dominant and very efficient. At the same time, when and , the two controls, and , are about the same, and there are more infected people towards the end of the study period, that is, the control strategy in Figure 14 is less efficient as compared to the case of Figure 13. The two figures, once again, underline the significance of the second control, .
5. Conclusion
To summarize, in this study, we investigated different control scenarios through theoretical analysis and numerical simulations. To account for two important types of control, social distancing and treatment with antiviral medications, the (Susceptible-Infectious-Removed) model [17] for an early ascending stage of an outbreak has been considered with the first control, , aimed to lower the disease transmission rate and the second control, , aimed to lower the period of infectiousness. In all experiments, the implementation of control strategies reduced the daily cumulative number of cases, , and successfully "flattened the curve", . The reduction in the cumulative cases was achieved by eliminating or delaying new cases. This delay is incredibly valuable as it provides public health organizations and researchers with more time to advance antiviral treatments and devise alternative preventive measures.
The main theoretical result of this paper, Theorem 3.1, concludes that the optimal control functions, , may be increasing until some moment . However, for all , the derivatives, , become negative and decline as t approaches T (possibly causing the number of newly infected people to grow). Numerical simulations presented in Section 4 confirm our theoretical findings. So, ideally, around the time , the control strategy has to be upgraded and a vaccination campaign needs to start to ensure the epidemic wave does not rebound.
Appendix A. Appendix
Appendix A.1. Properties of SIR Model with Time-Dependent Coefficients
In Section 3, it has been pointed out that even though for system (2), the effective reproduction number, , goes down with more control, it does not guarantee that yields for every value of t. One can, however, show that if and is non-increasing, then . The proof of this result is given below.
Theorem A.1 Assume that , , where ,
Let and satisfy and , respectively, with the same initial condition , , , for any , and . Suppose , , and for all . If and is non-increasing, then for any .
Proof. Since , and , one concludes that , , and . Therefore by (A1), and there exists such that for any . If the claim does not hold, then there is such that . By intermediate value theorem, there exists such that
From (A3), one obtains
that is,
On the other hand, according to (A2)
As it follows from (A1),
This yields,
Identities (A7) and (A8) imply,
Since is non-increasing, for any , , and , by intermediate value theorem for the first term in (A9), one has
where . Furthermore, by Lemma 2.1, and for any . Hence from it follows that
Combining (A10) and (A11), one concludes that , which contradicts (A5). This completes the proof. □
Appendix A.2. Additional Tables

Table A1.
Comparison of for cost function when there is only , only , and both applied versus No Control case over time when .
Table A1.
Comparison of for cost function when there is only , only , and both applied versus No Control case over time when .
| Day | No Control | No 2nd Control | No 1st Control | |
|---|---|---|---|---|
| 1 | 200 | 200 | 200 | 200 |
| 10 | 1,237 | 388 | 317 | 298 |
| 20 | 9,228 | 816 | 527 | 464 |
| 30 | 67,606 | 1,706 | 872 | 725 |
| 40 | 456,639 | 3,557 | 1,439 | 1,132 |
| 50 | 1,985,292 | 7,379 | 2,362 | 1,765 |
| 60 | 2,987,989 | 15,209 | 3,879 | 2,772 |
| 70 | 2,015,872 | 31,076 | 6,381 | 4,403 |
| 80 | 1,023,788 | 62,623 | 10,561 | 7,122 |
| 90 | 474,813 | 123,913 | 17,880 | 11,975 |
| 100 | 213,085 | 240,619 | 32,336 | 21,814 |
| 110 | 94,393 | 463,527 | 67,697 | 46,675 |
| 120 | 41,578 | 923,332 | 229,683 | 156,190 |
Table A2.
Comparison of for cost function when there is only , only , and both applied versus No Control case over time when .
Table A2.
Comparison of for cost function when there is only , only , and both applied versus No Control case over time when .
| Day | No Control | No 2nd Control | No 1st Control | |
|---|---|---|---|---|
| 1 | 200 | 200 | 200 | 200 |
| 10 | 1,237 | 377 | 308 | 289 |
| 20 | 9,228 | 766 | 495 | 437 |
| 30 | 67,606 | 1,552 | 795 | 662 |
| 40 | 456,639 | 3,134 | 1,273 | 1,003 |
| 50 | 1,985,292 | 6,302 | 2,034 | 1,524 |
| 60 | 2,987,989 | 12,618 | 3,258 | 2,333 |
| 70 | 2,015,872 | 25,120 | 5,256 | 3,624 |
| 80 | 1,023,788 | 49,586 | 8,558 | 5,751 |
| 90 | 474,813 | 96,926 | 14,338 | 9,523 |
| 100 | 213,085 | 188,180 | 25,768 | 17,140 |
| 110 | 94,393 | 367,745 | 53,756 | 36,352 |
| 120 | 41,578 | 760,101 | 183,048 | 121,390 |
Table A3.
Comparison of for cost function when there is only , only , and both applied versus No Control case over time when .
Table A3.
Comparison of for cost function when there is only , only , and both applied versus No Control case over time when .
| Day | No Control | No 2nd Control | No 1st Control | |
|---|---|---|---|---|
| 1 | 200 | 200 | 200 | 200 |
| 10 | 1,237 | 417 | 349 | 323 |
| 20 | 9,228 | 942 | 644 | 550 |
| 30 | 67,606 | 2,150 | 1,178 | 935 |
| 40 | 456,639 | 4,890 | 2,133 | 1,581 |
| 50 | 1,985,292 | 11,061 | 3,816 | 2,663 |
| 60 | 2,987,989 | 24,982 | 6,733 | 4,478 |
| 70 | 2,015,872 | 55,154 | 11,672 | 7,537 |
| 80 | 1,023,788 | 113,747 | 19,877 | 12,760 |
| 90 | 474,813 | 214,937 | 33,825 | 22,145 |
| 100 | 213,085 | 393,864 | 60,100 | 41,039 |
| 110 | 94,393 | 765,135 | 123,379 | 88,776 |
| 120 | 41,578 | 1,493,486 | 399,149 | 292,220 |
Table A4.
Cumulative number of infections up to day t, for cost function when there is only , only , and both versus No Control case over time when weight .
Table A4.
Cumulative number of infections up to day t, for cost function when there is only , only , and both versus No Control case over time when weight .
| Day | No Control | No 2nd Control | No 1st Control | |
|---|---|---|---|---|
| 1 | 200 | 200 | 200 | 200 |
| 10 | 1,756 | 644 | 897 | 767 |
| 20 | 13,747 | 1,657 | 2,149 | 1,738 |
| 30 | 101,568 | 3,762 | 4,215 | 3,249 |
| 40 | 697,572 | 8,148 | 7,626 | 5,604 |
| 50 | 3,338,392 | 17,229 | 13,223 | 9,267 |
| 60 | 7,032,920 | 35,913 | 22,418 | 15,000 |
| 70 | 8,627,485 | 74,051 | 37,492 | 24,055 |
| 80 | 9,121,747 | 150,774 | 62,328 | 38,584 |
| 90 | 9,292,217 | 302,212 | 103,637 | 62,591 |
| 100 | 9,358,556 | 595,429 | 175,436 | 104,787 |
| 110 | 9,386,082 | 1,158,900 | 313,167 | 188,825 |
| 120 | 9,397,865 | 2,283,654 | 665,799 | 416,713 |
Table A5.
Cumulative number of infections up to day t, for cost function when there is only , only , and both versus No Control case over time when weight .
Table A5.
Cumulative number of infections up to day t, for cost function when there is only , only , and both versus No Control case over time when weight .
| Day | No Control | No 2nd Control | No 1st Control | |
|---|---|---|---|---|
| 1 | 200 | 200 | 200 | 200 |
| 10 | 1,756 | 629 | 885 | 754 |
| 20 | 13,747 | 1,575 | 2,078 | 1,677 |
| 30 | 101,568 | 3,482 | 3,988 | 3,067 |
| 40 | 697,572 | 7,331 | 7,047 | 5,170 |
| 50 | 3,338,392 | 15,051 | 11,930 | 8,358 |
| 60 | 7,032,920 | 30,487 | 19,736 | 13,210 |
| 70 | 8,627,485 | 61,195 | 32,284 | 20,701 |
| 80 | 9,121,747 | 121,742 | 52,562 | 32,483 |
| 90 | 9,292,217 | 239,921 | 85,884 | 51,635 |
| 100 | 9,358,556 | 469,095 | 143,369 | 84,866 |
| 110 | 9,386,082 | 916,823 | 253,443 | 150,547 |
| 120 | 9,397,865 | 1,846,297 | 536,094 | 328,156 |
Table A6.
Cumulative number of infections up to day t, for cost function when there is only , only , and both versus No Control case over time when weight .
Table A6.
Cumulative number of infections up to day t, for cost function when there is only , only , and both versus No Control case over time when weight .
| Day | No Control | No 2nd Control | No 1st Control | |
|---|---|---|---|---|
| 1 | 200 | 200 | 200 | 200 |
| 10 | 1,756 | 685 | 937 | 803 |
| 20 | 13,747 | 1,863 | 2,398 | 1,927 |
| 30 | 101,568 | 4,545 | 5,068 | 3,835 |
| 40 | 697,572 | 10,636 | 9,909 | 7,055 |
| 50 | 3,338,392 | 24,388 | 18,614 | 12,483 |
| 60 | 7,032,920 | 55,445 | 34,055 | 21,602 |
| 70 | 8,627,485 | 123,916 | 60,931 | 36,924 |
| 80 | 9,121,747 | 264,191 | 106,859 | 62,740 |
| 90 | 9,292,217 | 525,613 | 184,436 | 106,949 |
| 100 | 9,358,556 | 1,000,085 | 317,429 | 186,138 |
| 110 | 9,386,082 | 1,928,590 | 565,198 | 344,961 |
| 120 | 9,397,865 | 3,757,435 | 1,169,728 | 768,757 |
Table A7.
Comparison of the daily number of infected people, , for the cost function with the weight for . The weights for the control are , , , and for the second, third, and fourth columns, respectively, and the fifth column shows the case of No Control over time.
Table A7.
Comparison of the daily number of infected people, , for the cost function with the weight for . The weights for the control are , , , and for the second, third, and fourth columns, respectively, and the fifth column shows the case of No Control over time.
| Day | No 2nd Control | ||||
|---|---|---|---|---|---|
| 1 | 200 | 200 | 200 | 200 | 200 |
| 10 | 183 | 251 | 298 | 317 | 388 |
| 20 | 171 | 324 | 464 | 532 | 816 |
| 30 | 168 | 422 | 725 | 892 | 1,706 |
| 40 | 171 | 556 | 1,132 | 1,490 | 3,557 |
| 50 | 182 | 740 | 1,765 | 2,483 | 7,379 |
| 60 | 203 | 1,006 | 2,772 | 4,143 | 15,209 |
| 70 | 240 | 1,408 | 4,403 | 6,949 | 31,076 |
| 80 | 302 | 2,046 | 7,122 | 11,770 | 62,623 |
| 90 | 415 | 3,162 | 11,975 | 20,464 | 123,913 |
| 100 | 656 | 5,454 | 21,814 | 37,902 | 240,619 |
| 110 | 1,290 | 11,440 | 46,675 | 80,593 | 463,527 |
| 120 | 4,634 | 41,179 | 156,190 | 251,157 | 923,332 |
Table A8.
Comparison of the daily number of infected people, , for the cost function with the weight for . The weights for the control are , , , and for the second, third, and fourth columns, respectively, and the fifth column shows the case of No Control over time.
Table A8.
Comparison of the daily number of infected people, , for the cost function with the weight for . The weights for the control are , , , and for the second, third, and fourth columns, respectively, and the fifth column shows the case of No Control over time.
| Day | No 2nd Control | ||||
|---|---|---|---|---|---|
| 1 | 200 | 200 | 200 | 200 | 200 |
| 10 | 179 | 245 | 289 | 308 | 377 |
| 20 | 165 | 309 | 437 | 498 | 766 |
| 30 | 160 | 394 | 662 | 807 | 1,552 |
| 40 | 161 | 508 | 1,003 | 1,305 | 3,134 |
| 50 | 168 | 662 | 1,524 | 2,107 | 6,302 |
| 60 | 185 | 884 | 2,333 | 3,416 | 12,618 |
| 70 | 216 | 1,217 | 3,624 | 5,586 | 25,120 |
| 80 | 267 | 1,739 | 5,751 | 9,264 | 49,586 |
| 90 | 361 | 2,647 | 9,523 | 15,856 | 96,926 |
| 100 | 560 | 4,497 | 17,140 | 29,108 | 188,180 |
| 110 | 1,074 | 9,247 | 36,352 | 61,700 | 367,745 |
| 120 | 3,747 | 32,698 | 121,390 | 194,169 | 760,101 |
Table A9.
Comparison of the daily number of infected people, , for the cost function with the weight for . The weights for the control are , , , and for the second, third, and fourth columns, respectively, and the fifth column shows the case of No Control over time.
Table A9.
Comparison of the daily number of infected people, , for the cost function with the weight for . The weights for the control are , , , and for the second, third, and fourth columns, respectively, and the fifth column shows the case of No Control over time.
| Day | No 2nd Control | ||||
|---|---|---|---|---|---|
| 1 | 200 | 200 | 200 | 200 | 200 |
| 10 | 185 | 263 | 323 | 351 | 401 |
| 20 | 177 | 357 | 550 | 658 | 918 |
| 30 | 177 | 490 | 935 | 1,227 | 2,133 |
| 40 | 185 | 675 | 1,581 | 2,274 | 4,939 |
| 50 | 202 | 937 | 2,663 | 4,178 | 11,366 |
| 60 | 232 | 1,326 | 4,478 | 7,610 | 25,851 |
| 70 | 284 | 1,929 | 7,537 | 13,717 | 57,953 |
| 80 | 373 | 2,911 | 12,760 | 24,464 | 127,302 |
| 90 | 540 | 4,681 | 22,145 | 43,673 | 266,304 |
| 100 | 907 | 8,432 | 41,039 | 80,621 | 509,874 |
| 110 | 1,955 | 18,778 | 88,776 | 166,824 | 899,275 |
| 120 | 7,639 | 71,495 | 292,220 | 482,565 | 1,511,537 |
Table A10.
Comparison of the daily number of infected people, , for the cost function with the weight for . The weights for the control are , , , and for the second, third, and fourth columns, respectively, and the fifth column shows the case of No Control over time.
Table A10.
Comparison of the daily number of infected people, , for the cost function with the weight for . The weights for the control are , , , and for the second, third, and fourth columns, respectively, and the fifth column shows the case of No Control over time.
| Day | No 1st Control | ||||
|---|---|---|---|---|---|
| 1 | 200 | 200 | 200 | 200 | 200 |
| 10 | 244 | 279 | 298 | 304 | 317 |
| 20 | 308 | 406 | 464 | 485 | 527 |
| 30 | 391 | 593 | 725 | 773 | 872 |
| 40 | 501 | 869 | 1,132 | 1,232 | 1,439 |
| 50 | 650 | 1,280 | 1,765 | 1,957 | 2,362 |
| 60 | 859 | 1,908 | 2,772 | 3,124 | 3,879 |
| 70 | 1,163 | 2,896 | 4,403 | 5,028 | 6,381 |
| 80 | 1,628 | 4,517 | 7,122 | 8,203 | 10,561 |
| 90 | 2,393 | 7,382 | 11,975 | 13,833 | 17,880 |
| 100 | 3,793 | 13,124 | 21,814 | 25,193 | 32,336 |
| 110 | 6,858 | 27,281 | 46,675 | 53,697 | 67,697 |
| 120 | 16,447 | 82,599 | 156,190 | 181,647 | 229,683 |
Table A11.
Comparison of the daily number of infected people, , for the cost function with the weight for . The weights for the control are , , , and for the second, third, and fourth columns, respectively, and the fifth column shows the case of No Control over time.
Table A11.
Comparison of the daily number of infected people, , for the cost function with the weight for . The weights for the control are , , , and for the second, third, and fourth columns, respectively, and the fifth column shows the case of No Control over time.
| Day | No 1st Control | ||||
|---|---|---|---|---|---|
| 1 | 200 | 200 | 200 | 200 | 200 |
| 10 | 241 | 274 | 289 | 295 | 308 |
| 20 | 299 | 388 | 437 | 456 | 495 |
| 30 | 375 | 546 | 662 | 705 | 795 |
| 40 | 475 | 772 | 1,003 | 1,090 | 1,273 |
| 50 | 609 | 1,116 | 1,524 | 1,682 | 2,034 |
| 60 | 795 | 1,636 | 2,333 | 2,617 | 3,258 |
| 70 | 1,065 | 2,421 | 3,624 | 4,119 | 5,256 |
| 80 | 1,473 | 3,676 | 5,751 | 6,596 | 8,558 |
| 90 | 2,138 | 5,900 | 9,523 | 10,976 | 14,338 |
| 100 | 3,349 | 10,387 | 17,140 | 19,806 | 25,768 |
| 110 | 5,944 | 21,561 | 36,352 | 41,897 | 53,756 |
| 120 | 13,985 | 65,461 | 121,390 | 141,870 | 183,048 |
Table A12.
Comparison of the daily number of infected people, , for the cost function with the weight for . The weights for the control are , , , and for the second, third, and fourth columns, respectively, and the fifth column shows the case of No Control over time.
Table A12.
Comparison of the daily number of infected people, , for the cost function with the weight for . The weights for the control are , , , and for the second, third, and fourth columns, respectively, and the fifth column shows the case of No Control over time.
| Day | No 1st Control | ||||
|---|---|---|---|---|---|
| 1 | 200 | 200 | 200 | 200 | 200 |
| 10 | 243 | 295 | 323 | 331 | 349 |
| 20 | 305 | 458 | 550 | 581 | 644 |
| 30 | 386 | 711 | 935 | 1,016 | 1,178 |
| 40 | 493 | 1,105 | 1,581 | 1,765 | 2,133 |
| 50 | 642 | 1,723 | 2,663 | 3,040 | 3,816 |
| 60 | 857 | 2,705 | 4,478 | 5,206 | 6,733 |
| 70 | 1,181 | 4,303 | 7,537 | 8,876 | 11,672 |
| 80 | 1,688 | 7,008 | 12,760 | 15,100 | 19,877 |
| 90 | 2,559 | 11,918 | 22,145 | 26,079 | 33,825 |
| 100 | 4,271 | 21,947 | 41,039 | 47,785 | 60,100 |
| 110 | 8,353 | 47,241 | 88,776 | 101,665 | 123,379 |
| 120 | 22,600 | 146,614 | 292,220 | 334,465 | 399,149 |
Table A13.
Comparison of for cost function in case when only control is applied and varies. As increases, the number of infected individuals, , gets higher on most days.
Table A13.
Comparison of for cost function in case when only control is applied and varies. As increases, the number of infected individuals, , gets higher on most days.
| Day | No 2nd Control | No 2nd Control | No 2nd Control | No 2nd Control | No Control |
|---|---|---|---|---|---|
| 1 | 200 | 200 | 200 | 200 | 200 |
| 10 | 88 | 255 | 317 | 388 | 1,237 |
| 20 | 36 | 334 | 533 | 816 | 9,228 |
| 30 | 15 | 441 | 894 | 1,706 | 67,606 |
| 40 | 6 | 586 | 1,498 | 3,557 | 456,639 |
| 50 | 3 | 786 | 2,512 | 7,379 | 1,985,292 |
| 60 | 1 | 1,068 | 4,219 | 15,209 | 2,987,989 |
| 70 | 0 | 1,479 | 7,126 | 31,076 | 2,015,872 |
| 80 | 0 | 2,101 | 12,151 | 62,623 | 1,023,788 |
| 90 | 0 | 3,105 | 21,130 | 123,913 | 474,813 |
| 100 | 0 | 4,883 | 38,221 | 240,619 | 213,085 |
| 110 | 0 | 8,576 | 74,708 | 463,527 | 94,393 |
| 120 | 0 | 19,158 | 177,113 | 923,332 | 41,578 |
Table A14.
Comparison of for cost function in case when only control is applied and varies. As increases, the number of infected individuals, , gets higher on most days.
Table A14.
Comparison of for cost function in case when only control is applied and varies. As increases, the number of infected individuals, , gets higher on most days.
| Day | No 2nd Control | No 2nd Control | No 2nd Control | No 2nd Control | No Control |
|---|---|---|---|---|---|
| 1 | 200 | 200 | 200 | 200 | 200 |
| 10 | 86 | 254 | 314 | 377 | 1,237 |
| 20 | 35 | 332 | 522 | 766 | 9,228 |
| 30 | 15 | 437 | 867 | 1,552 | 67,606 |
| 40 | 8 | 579 | 1,438 | 3,134 | 456,639 |
| 50 | 4 | 773 | 2,388 | 6,302 | 1,985,292 |
| 60 | 2 | 1,044 | 3,972 | 12,618 | 2,987,989 |
| 70 | 1 | 1,437 | 6,644 | 25,120 | 2,015,872 |
| 80 | 1 | 2,025 | 11,220 | 49,586 | 1,023,788 |
| 90 | 0 | 2,963 | 19,303 | 96,926 | 474,813 |
| 100 | 0 | 4,592 | 34,478 | 188,180 | 213,085 |
| 110 | 0 | 7,879 | 66,265 | 367,745 | 94,393 |
| 120 | 0 | 16,955 | 153,051 | 760,101 | 41,578 |
Table A15.
Comparison of for cost function in case when only control is applied and varies. As increases, the number of infected individuals, , gets higher on most days.
Table A15.
Comparison of for cost function in case when only control is applied and varies. As increases, the number of infected individuals, , gets higher on most days.
| Day | No 2nd Control | No 2nd Control | No 2nd Control | No 2nd Control | No Control |
|---|---|---|---|---|---|
| 1 | 200 | 200 | 200 | 200 | 200 |
| 10 | 28 | 248 | 319 | 401 | 1,237 |
| 20 | 4 | 315 | 542 | 918 | 9,228 |
| 30 | 1 | 405 | 917 | 2,133 | 67,606 |
| 40 | 0 | 527 | 1,550 | 4,939 | 456,639 |
| 50 | 0 | 696 | 2,623 | 11,366 | 1,985,292 |
| 60 | 0 | 936 | 4,447 | 25,851 | 2,987,989 |
| 70 | 0 | 1,296 | 7,593 | 57,953 | 2,015,872 |
| 80 | 0 | 1,865 | 13,135 | 127,302 | 1,023,788 |
| 90 | 0 | 2,840 | 23,348 | 266,304 | 474,813 |
| 100 | 0 | 4,726 | 43,733 | 509,874 | 213,085 |
| 110 | 0 | 9,137 | 91,108 | 899,275 | 94,393 |
| 120 | 0 | 24,025 | 240,585 | 1,511,537 | 41,578 |
Table A16.
Comparison of for cost function in case when only control is applied and varies. As increases, the number of infected individuals, , gets higher on most days.
Table A16.
Comparison of for cost function in case when only control is applied and varies. As increases, the number of infected individuals, , gets higher on most days.
| Day | No 1st Control | No 1st Control | No 1st Control | No 1st Control | No 1st Control | No Control |
|---|---|---|---|---|---|---|
| 1 | 200 | 200 | 200 | 200 | 200 | 200 |
| 10 | 17 | 183 | 255 | 317 | 369 | 1,237 |
| 20 | 1 | 172 | 335 | 527 | 722 | 9,228 |
| 30 | 0 | 169 | 444 | 872 | 1,404 | 67,606 |
| 40 | 0 | 173 | 592 | 1,439 | 2,701 | 456,639 |
| 50 | 0 | 185 | 797 | 2,362 | 5,115 | 1,985,292 |
| 60 | 0 | 207 | 1,095 | 3,879 | 9,510 | 2,987,989 |
| 70 | 0 | 245 | 1,546 | 6,381 | 17,215 | 2,015,872 |
| 80 | 0 | 311 | 2,267 | 10,561 | 30,078 | 1,023,788 |
| 90 | 0 | 437 | 3,527 | 17,880 | 51,136 | 474,813 |
| 100 | 0 | 695 | 6,103 | 32,336 | 87,648 | 213,085 |
| 110 | 0 | 1,398 | 12,821 | 67,697 | 164,273 | 94,393 |
| 120 | 0 | 5,103 | 46,967 | 229,683 | 464,307 | 41,578 |
Table A17.
Comparison of for cost function in case when only control is applied and varies. As increases, the number of infected individuals, , gets higher on most days.
Table A17.
Comparison of for cost function in case when only control is applied and varies. As increases, the number of infected individuals, , gets higher on most days.
| Day | No 1st Control | No 1st Control | No 1st Control | No 1st Control | No 1st Control | No Control |
|---|---|---|---|---|---|---|
| 1 | 200 | 200 | 200 | 200 | 200 | 200 |
| 10 | 17 | 180 | 250 | 308 | 347 | 1,237 |
| 20 | 1 | 166 | 321 | 495 | 636 | 9,228 |
| 30 | 0 | 161 | 417 | 795 | 1,159 | 67,606 |
| 40 | 0 | 163 | 546 | 1,273 | 2,096 | 456,639 |
| 50 | 0 | 171 | 723 | 2,034 | 3,752 | 1,985,292 |
| 60 | 0 | 189 | 978 | 3,258 | 6,656 | 2,987,989 |
| 70 | 0 | 219 | 1,359 | 5,256 | 11,661 | 2,015,872 |
| 80 | 0 | 274 | 1,962 | 8,558 | 20,100 | 1,023,788 |
| 90 | 0 | 377 | 3,014 | 14,338 | 34,531 | 474,813 |
| 100 | 0 | 587 | 5,134 | 25,768 | 61,227 | 213,085 |
| 110 | 0 | 1,147 | 10,559 | 53,756 | 120,600 | 94,393 |
| 120 | 0 | 4,067 | 37,929 | 183,048 | 365,469 | 41,578 |
Table A18.
Comparison of for cost function in case when only control is applied and varies. As increases, the number of infected individuals, , gets higher on most days.
Table A18.
Comparison of for cost function in case when only control is applied and varies. As increases, the number of infected individuals, , gets higher on most days.
| Day | No 1st Control | No 1st Control | No 1st Control | No 1st Control | No 1st Control | No Control |
|---|---|---|---|---|---|---|
| 1 | 200 | 200 | 200 | 200 | 200 | 200 |
| 10 | 2 | 185 | 265 | 349 | 381 | 1,237 |
| 20 | 0 | 177 | 364 | 644 | 767 | 9,228 |
| 30 | 0 | 177 | 501 | 1,178 | 1,531 | 67,606 |
| 40 | 0 | 186 | 695 | 2,133 | 3,019 | 456,639 |
| 50 | 0 | 204 | 972 | 3,816 | 5,908 | 1,985,292 |
| 60 | 0 | 235 | 1,384 | 6,733 | 11,591 | 2,987,989 |
| 70 | 0 | 288 | 2,021 | 11,672 | 22,889 | 2,015,872 |
| 80 | 0 | 382 | 3,067 | 19,877 | 45,018 | 1,023,788 |
| 90 | 1 | 559 | 4,960 | 33,825 | 86,814 | 474,813 |
| 100 | 1 | 949 | 8,995 | 60,100 | 165,937 | 213,085 |
| 110 | 0 | 2,069 | 20,200 | 123,379 | 338,415 | 94,393 |
| 120 | 0 | 8,174 | 78,701 | 399,149 | 878,072 | 41,578 |
References
- Cai, L.; Li, X.; Tuncer, N.; Martcheva, M.; Lashari, A.A. Optimal control of a malaria model with asymptomatic class and superinfection. Mathematical Biosciences 2017, 288, 94–108. [Google Scholar] [CrossRef] [PubMed]
- Panovska-Griffiths, J.; Kerr, C.C.; Stuart, R.M.; Mistry, D.; Klein, D.J.; Viner, R.M.; Bonell, C. Determining the optimal strategy for reopening schools, the impact of test and trace interventions, and the risk of occurrence of a second COVID-19 epidemic wave in the UK: a modelling study. The Lancet Child & Adolescent Health 2020, 4, 817–827. [Google Scholar]
- Paltiel, A.D.; Zheng, A.; Walensky, R.P. Assessment of SARS-CoV-2 screening strategies to permit the safe reopening of college campuses in the United States. JAMA network open 2020, 3, e2016818–e2016818. [Google Scholar] [CrossRef] [PubMed]
- Aaby, P.; Samb, B.; Simondon, F.; Seck, A.M.C.; Knudsen, K.; Whittle, H. Non-specific beneficial effect of measles immunisation: analysis of mortality studies from developing countries. Bmj 1995, 311, 481–485. [Google Scholar] [CrossRef] [PubMed]
- Ahmed, F.; Lindley, M.C.; Allred, N.; Weinbaum, C.M.; Grohskopf, L. Effect of influenza vaccination of healthcare personnel on morbidity and mortality among patients: systematic review and grading of evidence. Clinical infectious diseases 2014, 58, 50–57. [Google Scholar] [CrossRef] [PubMed]
- Sivaraman, K.; Dhawan, S.; Chopra, A.; Bhat, S.G. How Effective Were Isolation and Quarantine Strategies during the COVID-19 Pandemic: Challenges and Lessons Learned So Far? Preprints.org 2024. [Google Scholar]
- Strassburg, M.A. The global eradication of smallpox. American journal of infection control 1982, 10, 53–59. [Google Scholar] [CrossRef] [PubMed]
- D’Ortenzio, E.; Do, C.; Renault, P.; Weber, F.; Filleul, L. Enhanced influenza surveillance on Réunion Island (southern hemisphere) in the context of the emergence of influenza A(H1N1)v. Eurosurveillance 2009, 14, 19239. [Google Scholar] [CrossRef] [PubMed]
- Barlow M., M. N.; R., T. Optimal shutdown strategies for COVID-19 with economic and mortality costs: British Columbia as a case study. Royal Society Open Science 2021, 8, 1–18. [Google Scholar] [CrossRef] [PubMed]
- Saha, S.; Samanta, G. Modelling the role of optimal social distancing on disease prevalence of COVID-19 epidemic. International Journal of Dynamics and Control 2021, 9, 1053–1077. [Google Scholar] [CrossRef] [PubMed]
- Saha, S.; Samanta, G.; Nieto, J. Impact of optimal vaccination and social distancing on COVID-19 pandemic. Mathematics and Computers in Simulation 2022, 200, 285–314. [Google Scholar] [CrossRef] [PubMed]
- Firth, J.A.; Hellewell, J.; Klepac, P.; Kissler, S.; Kucharski, A.J.; Spurgin, L.G. Using a real-world network to model localized COVID-19 control strategies. Nature medicine 2020, 26, 1616–1622. [Google Scholar] [CrossRef] [PubMed]
- Köhler, J.; Schwenkel, L.; Koch, A.; Berberich, J.; Pauli, P.; Allgöwer, F. Robust and optimal predictive control of the COVID-19 outbreak. Annual Reviews in Control 2021, 51, 525–539. [Google Scholar] [CrossRef] [PubMed]
- Lü, X.; Hui, H.w.; Liu, F.f.; Bai, Y.l. Stability and optimal control strategies for a novel epidemic model of COVID-19. Nonlinear Dynamics 2021, 106, 1491–1507. [Google Scholar] [CrossRef] [PubMed]
- Tuncer, N.; Timsina, A.; Nuno, M.; Chowell, G.; Martcheva, M. Parameter identifiability and optimal control of an SARS-CoV-2 model early in the pandemic. Journal of Biological Dynamics 2022, 16, 412–438. [Google Scholar] [CrossRef] [PubMed]
- Ghosh, J.K.; Ghosh, U.; Biswas, M.; Sarkar, S. Qualitative analysis and optimal control strategy of an SIR model with saturated incidence and treatment. Differential Equations and Dynamical Systems. [CrossRef]
- Kermack, W.O.; McKendrick, A.G. A contribution to the mathematical theory of epidemics. Proceedings of the royal society of london. Series A, Containing papers of a mathematical and physical character 1927, 115, 700–721. [Google Scholar]
- Hethcote, H.W.; Yorke, J.A. Gonorrhea transmission dynamics and control; Vol. 56, Springer, 2014.
- Lee, S.; Chowell, G.; Castillo-Chávez, C. Optimal control for pandemic influenza: The role of limited antiviral treatment and isolation. Journal of Theoretical Biology 2010, 265, 136–150. [Google Scholar] [CrossRef] [PubMed]
- Smirnova, A.; Ye, X. On Optimal Control at the Onset of a New Viral Outbreak. Infectious Disease Modelling 2024. [Google Scholar] [CrossRef] [PubMed]
- Lenhart, S. ; J.T.Workman. Optimal control applied to biological models. Chapman and Hall/CRC. [CrossRef]
- Pontryagin, L.S. Mathematical Theory of Optimal Processes; Routledge, 2018.
Figure 1.
Comparison of the four control cost functions used in numerical experiments below: , , .
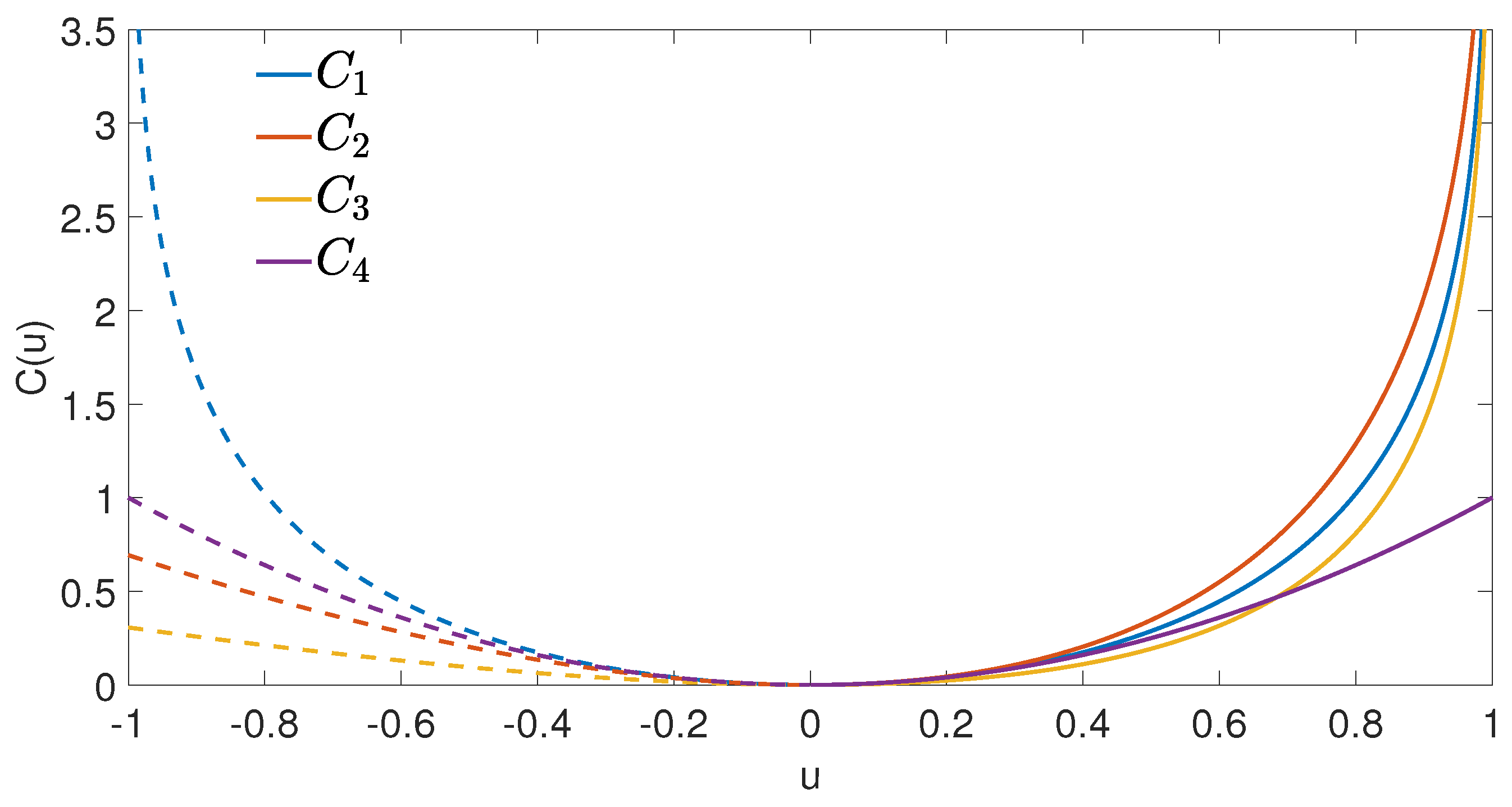
Figure 2.
Graphs of Susceptible (top on the left), Infected (top on the right), Recovered (bottom on the left) people, and control (bottom on the right) over time for four different cost functions versus No Control when weight is .
Figure 2.
Graphs of Susceptible (top on the left), Infected (top on the right), Recovered (bottom on the left) people, and control (bottom on the right) over time for four different cost functions versus No Control when weight is .
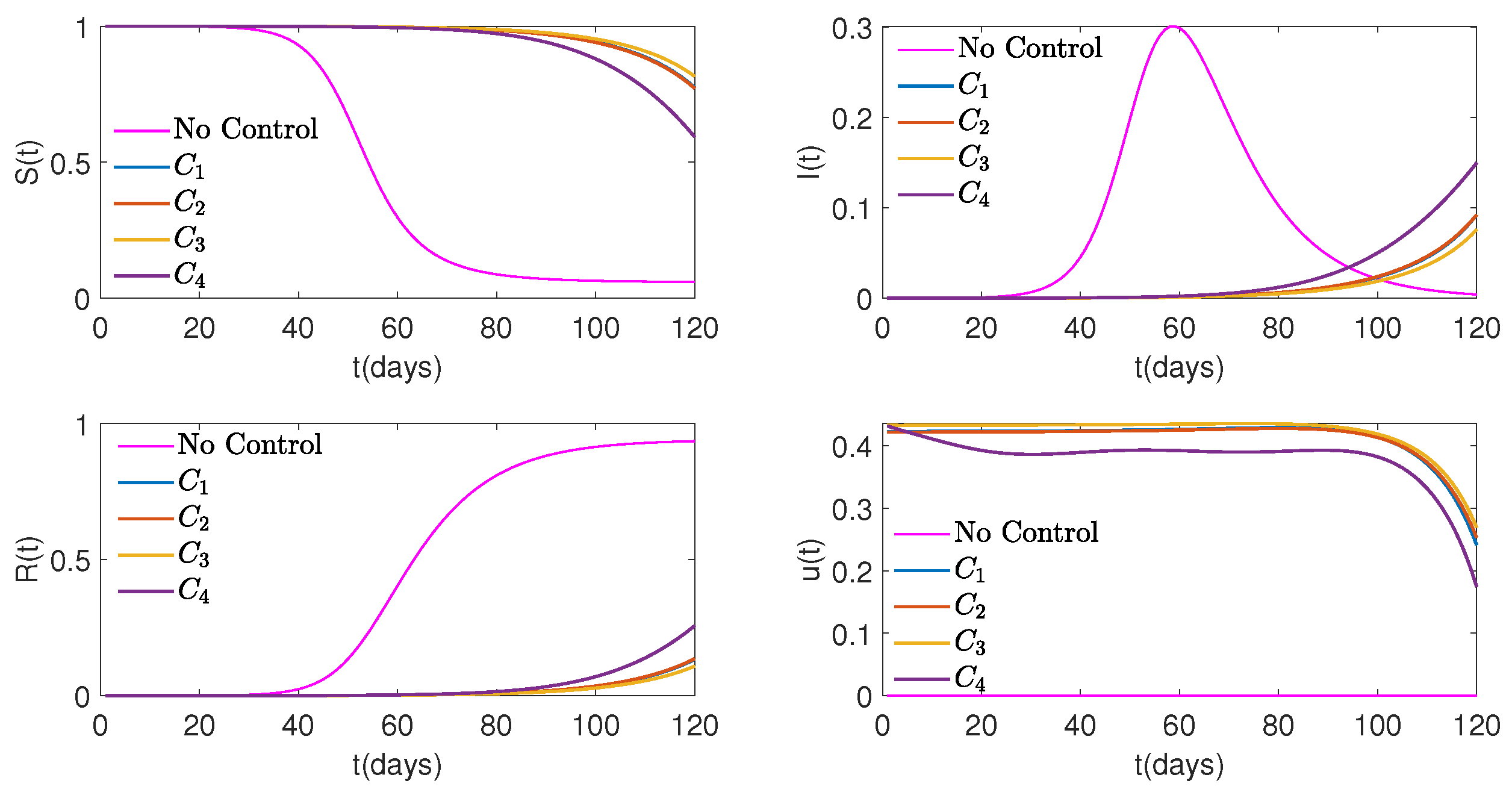
Figure 3.
Graphs of Susceptible (top on the left), Infected (top on the right), Recovered (bottom on the left) people, and control (bottom on the right) over time for four different cost functions versus No Control when weight is .
Figure 3.
Graphs of Susceptible (top on the left), Infected (top on the right), Recovered (bottom on the left) people, and control (bottom on the right) over time for four different cost functions versus No Control when weight is .
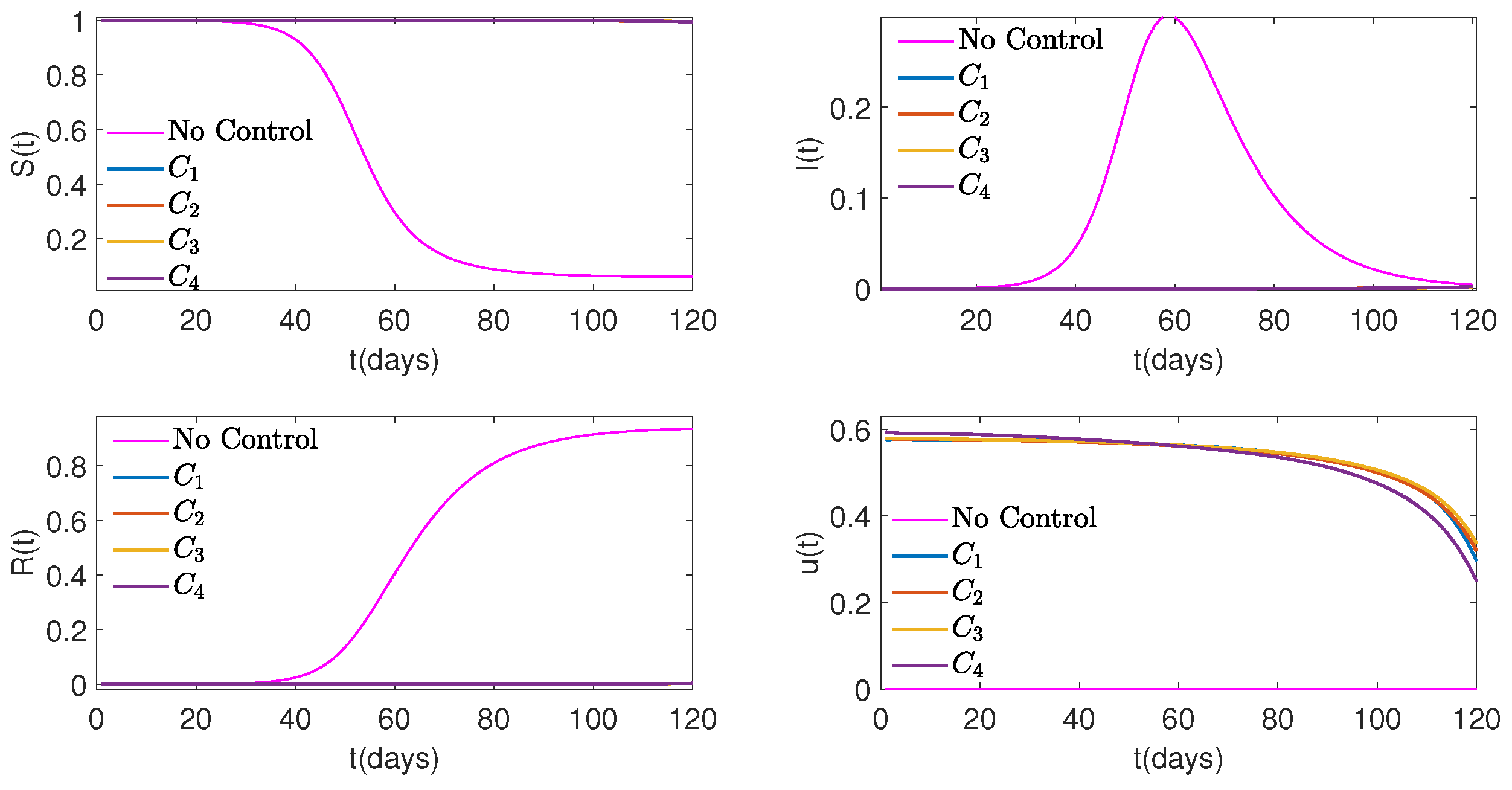
Figure 4.
Graphs of Susceptible (top on the left), Infected (top on the right), Recovered (bottom on the left) people, and control (bottom on the right) over time for four different cost functions versus No Control when weight is . For the cost function , stays above the ultimate value, , for more than half of the study period, which is not practical.
Figure 4.
Graphs of Susceptible (top on the left), Infected (top on the right), Recovered (bottom on the left) people, and control (bottom on the right) over time for four different cost functions versus No Control when weight is . For the cost function , stays above the ultimate value, , for more than half of the study period, which is not practical.
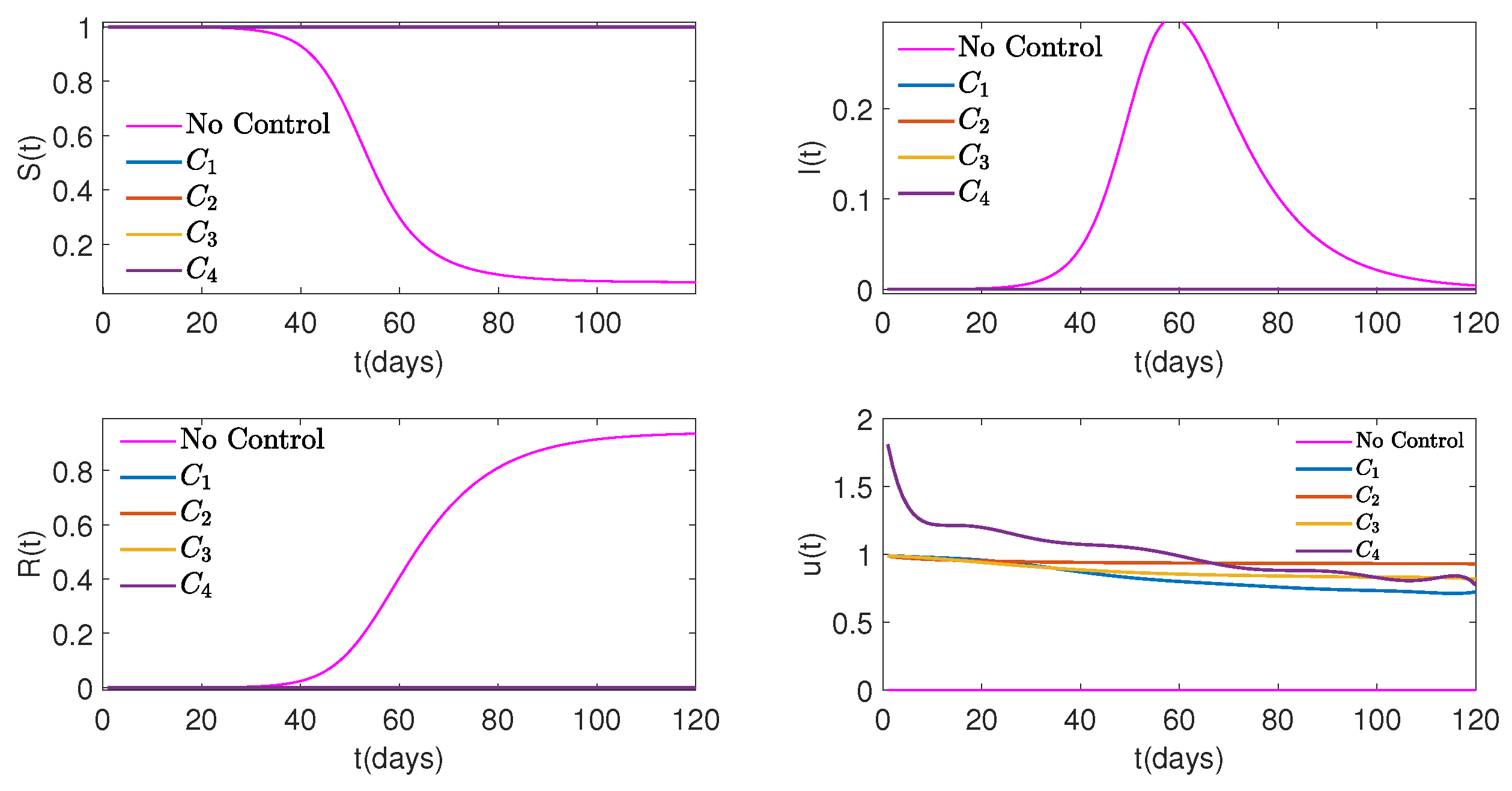
Figure 5.
Graphs of Susceptible (top on the left), Infected (top on the right), Recovered (bottom on the left) people, and control (bottom on the right) over time for four different cost functions versus No Control when weight is .
Figure 5.
Graphs of Susceptible (top on the left), Infected (top on the right), Recovered (bottom on the left) people, and control (bottom on the right) over time for four different cost functions versus No Control when weight is .
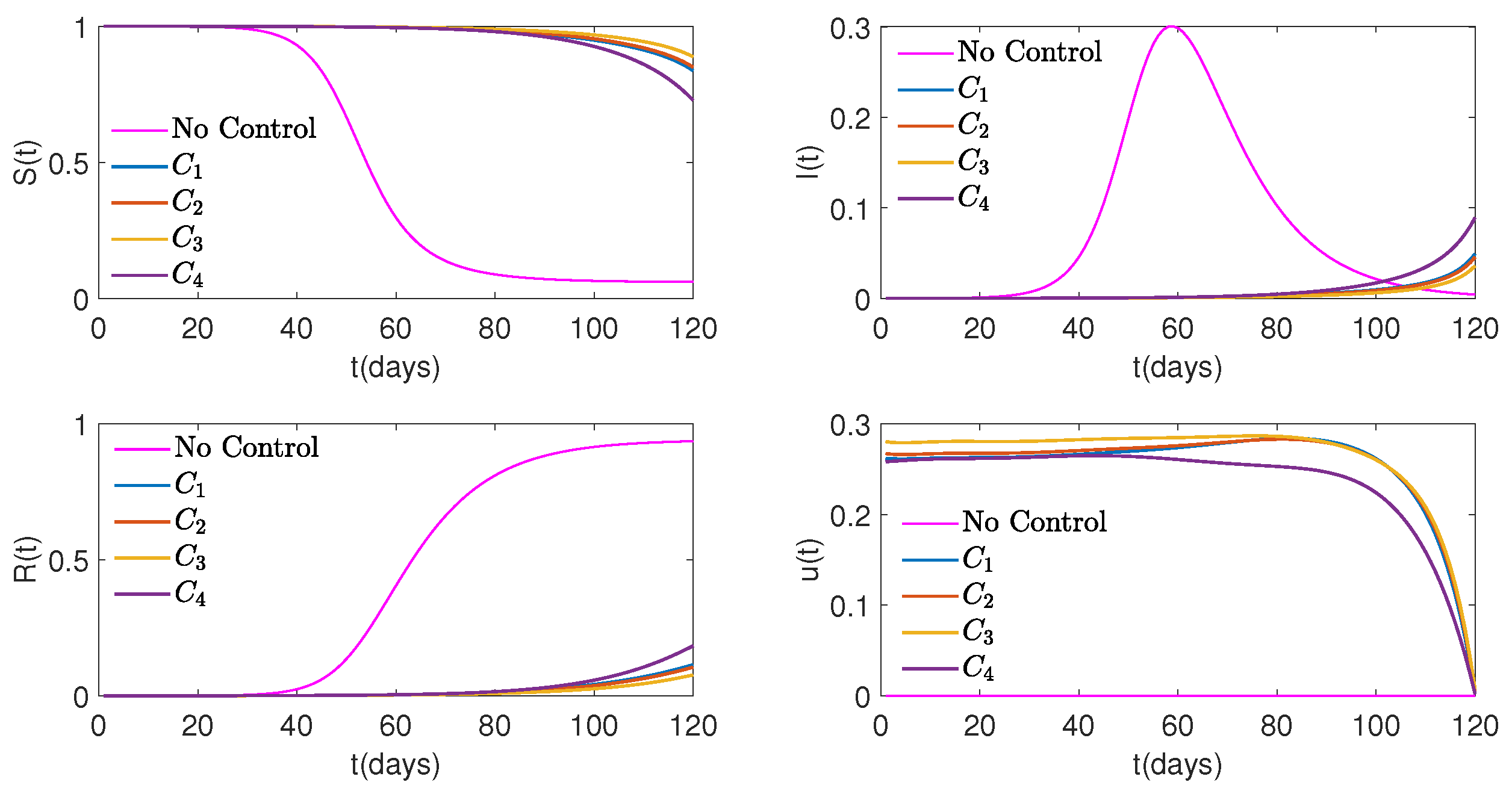
Figure 6.
Graphs of Susceptible (top on the left), Infected (top on the right), Recovered (bottom on the left) people, and control (bottom on the right) over time for four different cost functions versus No Control when weight is .
Figure 6.
Graphs of Susceptible (top on the left), Infected (top on the right), Recovered (bottom on the left) people, and control (bottom on the right) over time for four different cost functions versus No Control when weight is .
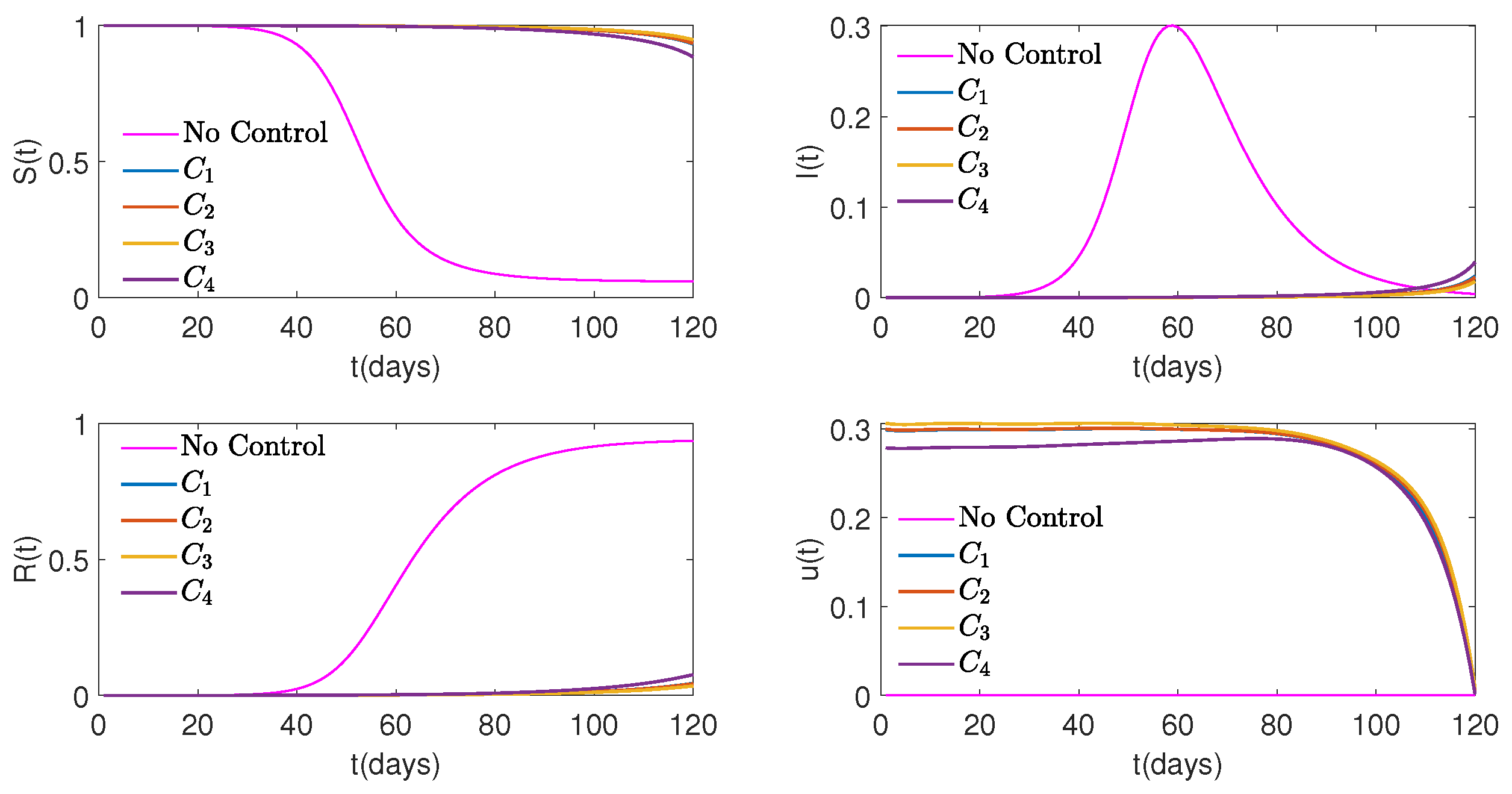
Figure 7.
Graphs of Susceptible (top on the left), Infected (top on the right), Recovered (bottom on the left) people, and control (bottom on the right) over time for four different cost functions versus No Control when weight is .
Figure 7.
Graphs of Susceptible (top on the left), Infected (top on the right), Recovered (bottom on the left) people, and control (bottom on the right) over time for four different cost functions versus No Control when weight is .
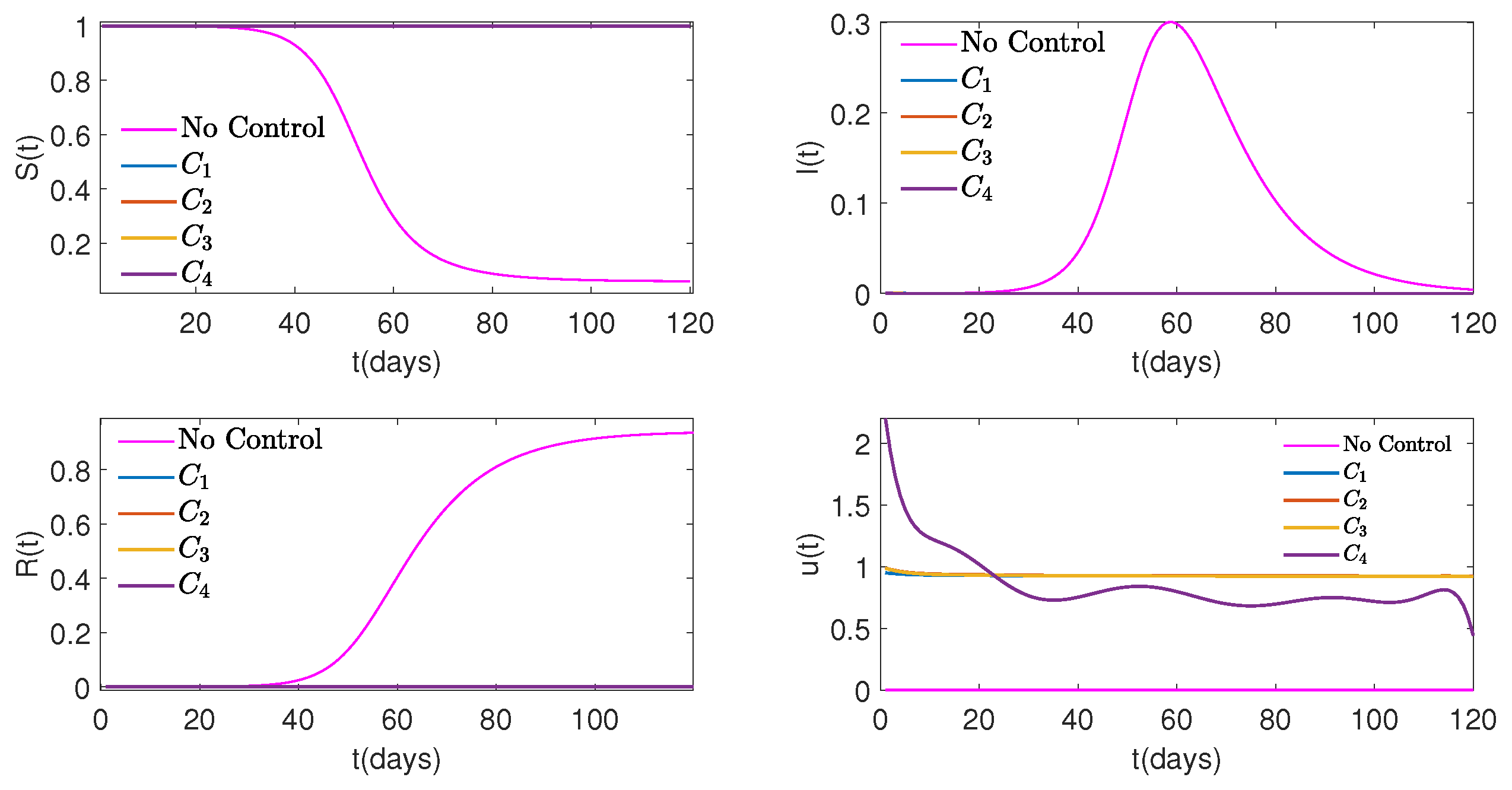
Figure 8.
Graphs of for different cost functions when only is applied and (shown with solid lines), and when only is applied and (shown with dashed line).
Figure 8.
Graphs of for different cost functions when only is applied and (shown with solid lines), and when only is applied and (shown with dashed line).
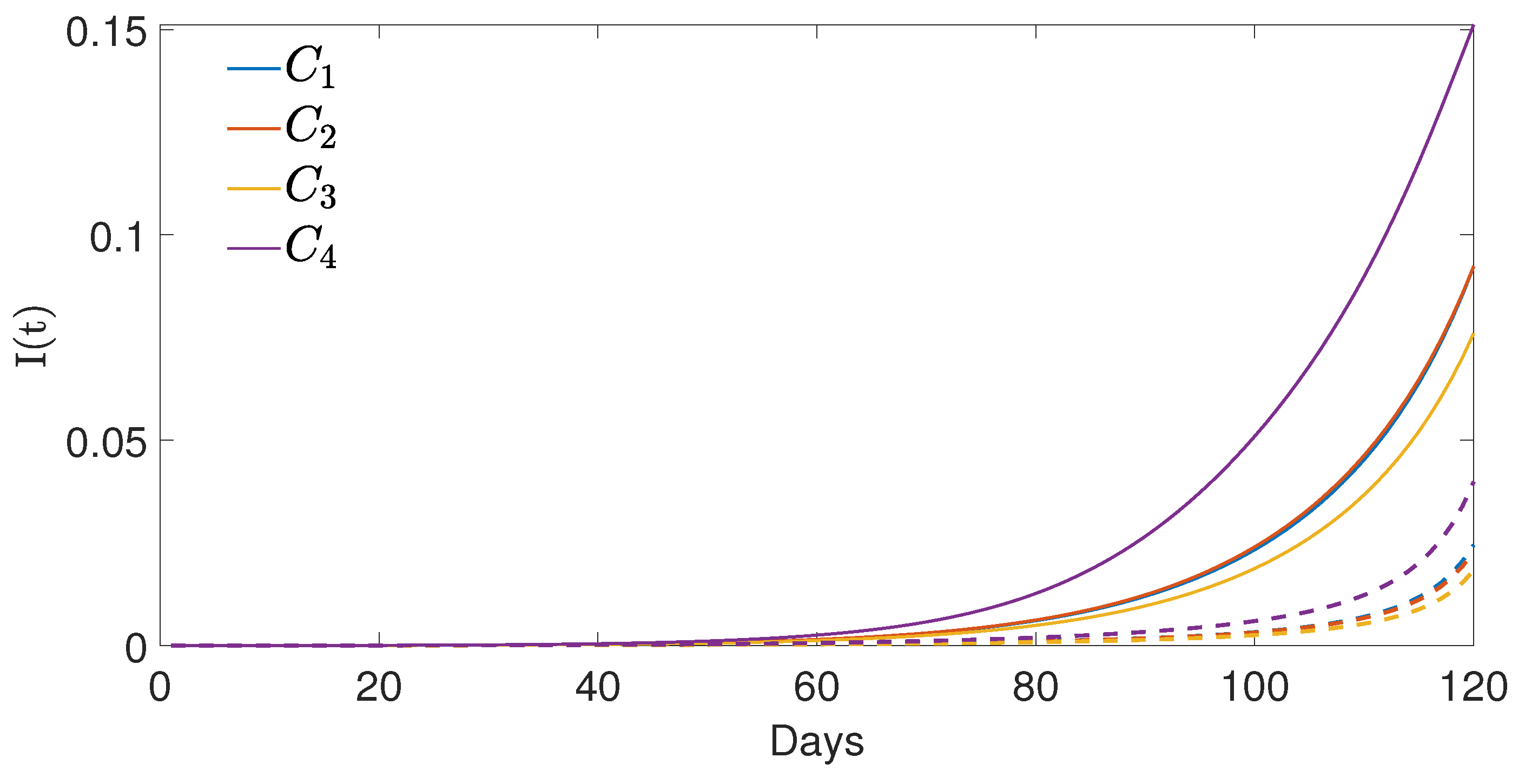
Figure 9.
Graphs of Susceptible (top on the left), Infected (top on the right), Recovered (bottom on the left) people, and controls shown with solid lines, and with dashed lines (bottom on the right) over time for four different cost functions versus No Control when weights, , and , for both controls are .
Figure 9.
Graphs of Susceptible (top on the left), Infected (top on the right), Recovered (bottom on the left) people, and controls shown with solid lines, and with dashed lines (bottom on the right) over time for four different cost functions versus No Control when weights, , and , for both controls are .
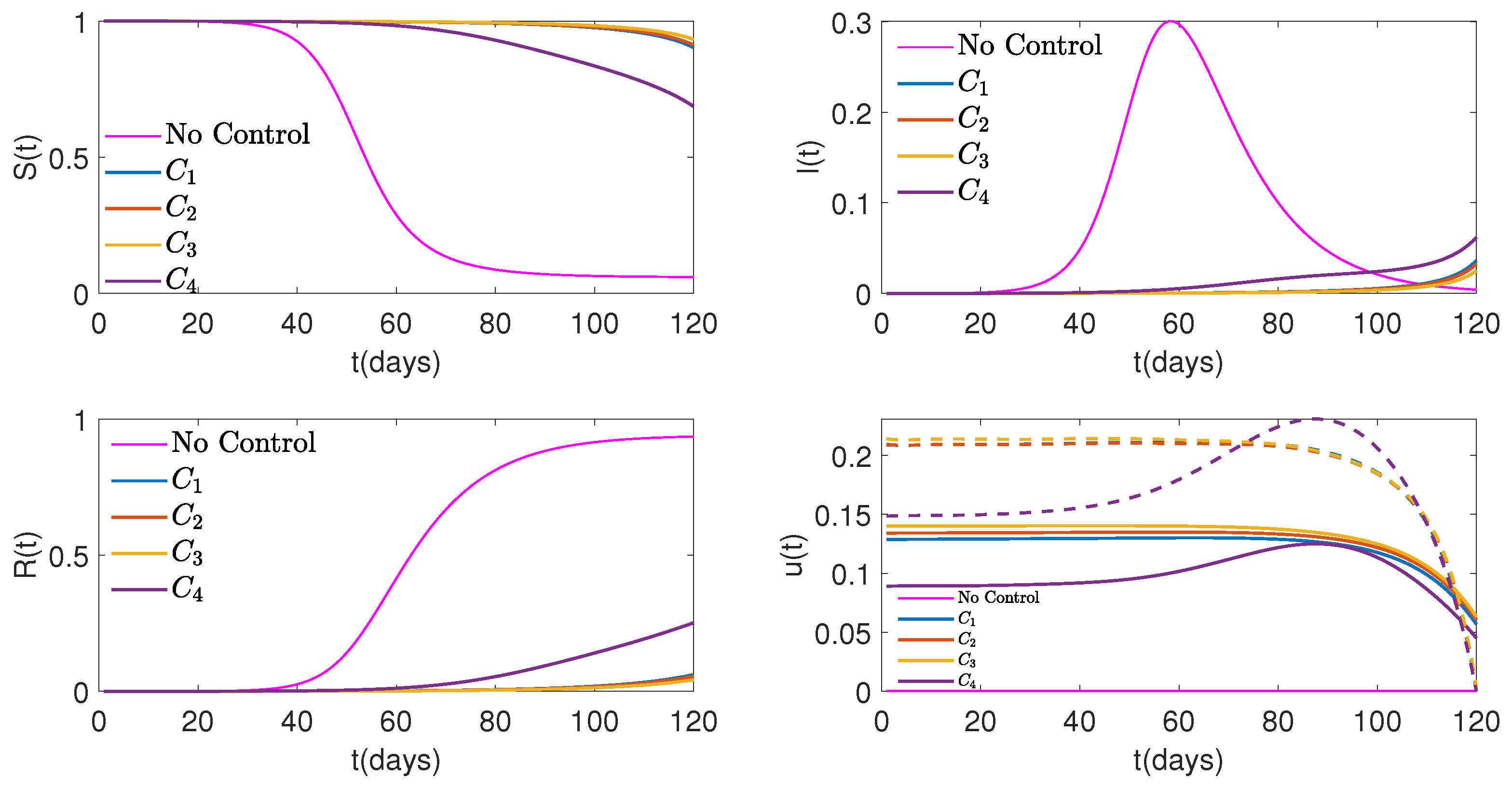
Figure 10.
Graphs of Susceptible (top on the left), Infected (top on the right), Recovered (bottom on the left) people, and control shown with solid lines, and with dashed lines (bottom on the right) over time for four different cost functions versus No Control when weight, , for both controls is .
Figure 10.
Graphs of Susceptible (top on the left), Infected (top on the right), Recovered (bottom on the left) people, and control shown with solid lines, and with dashed lines (bottom on the right) over time for four different cost functions versus No Control when weight, , for both controls is .
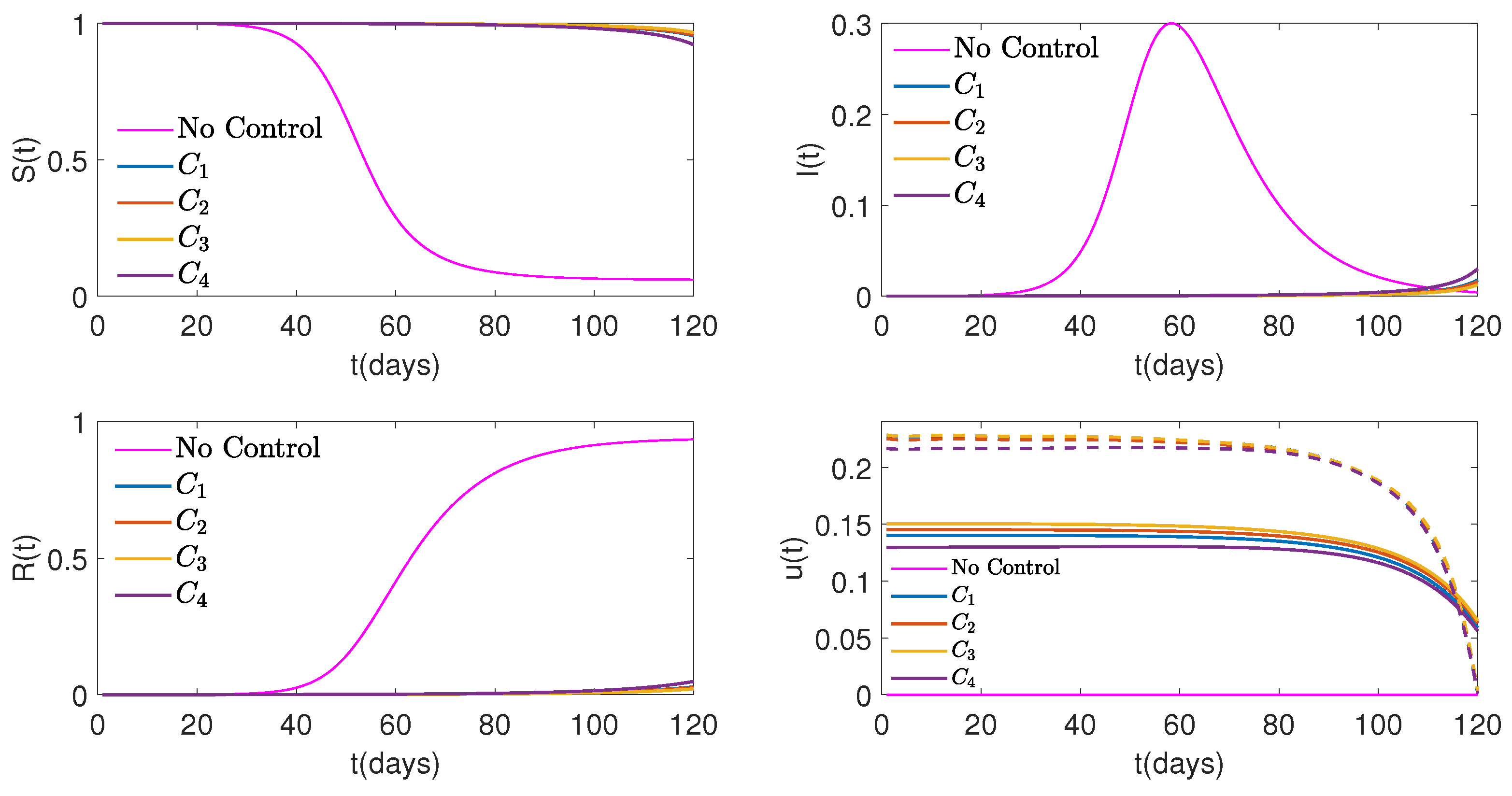
Figure 11.
Graphs of Susceptible (top on the left), Infected (top on the right), Recovered (bottom on the left) people, and controls shown with solid lines, and with dashed lines (bottom on the right) over time for four different cost functions versus No Control when weight, , for both controls is .
Figure 11.
Graphs of Susceptible (top on the left), Infected (top on the right), Recovered (bottom on the left) people, and controls shown with solid lines, and with dashed lines (bottom on the right) over time for four different cost functions versus No Control when weight, , for both controls is .
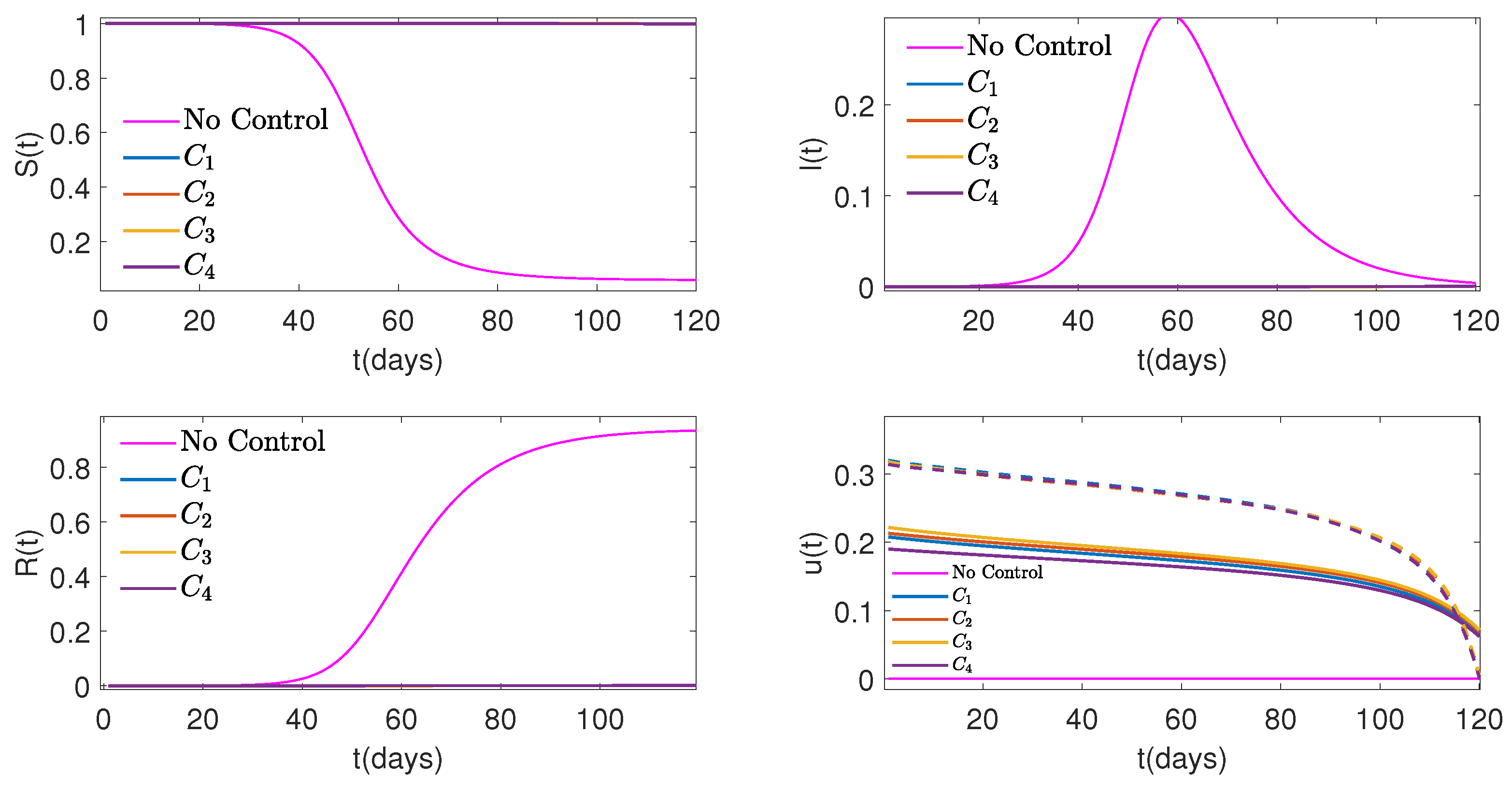
Figure 12.
Graphs of Susceptible (top on the left), Infected (top on the right), Recovered (bottom on the left) people, and controls shown with solid lines and with dashed lines (bottom on the right) for four different cost functions versus No Control when weight, , for both controls is . Control for cost function takes unrealistic values above 1 at the early period of the study.
Figure 12.
Graphs of Susceptible (top on the left), Infected (top on the right), Recovered (bottom on the left) people, and controls shown with solid lines and with dashed lines (bottom on the right) for four different cost functions versus No Control when weight, , for both controls is . Control for cost function takes unrealistic values above 1 at the early period of the study.
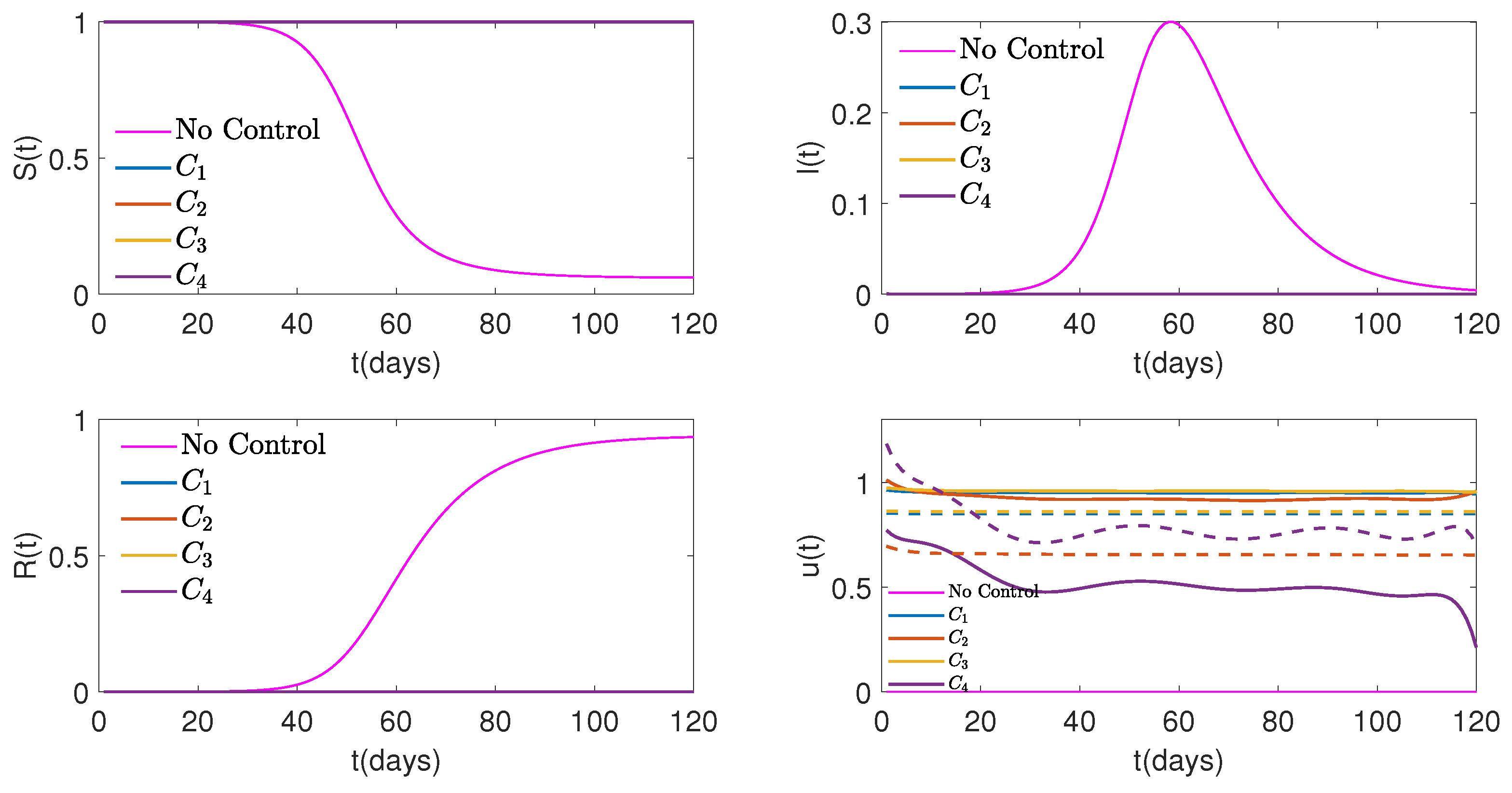
Figure 13.
The proportion of Infected people, , for different cost functions and No Control case when (on the top ) and controls shown with solid lines, and with dashed lines (on the bottom).
Figure 13.
The proportion of Infected people, , for different cost functions and No Control case when (on the top ) and controls shown with solid lines, and with dashed lines (on the bottom).
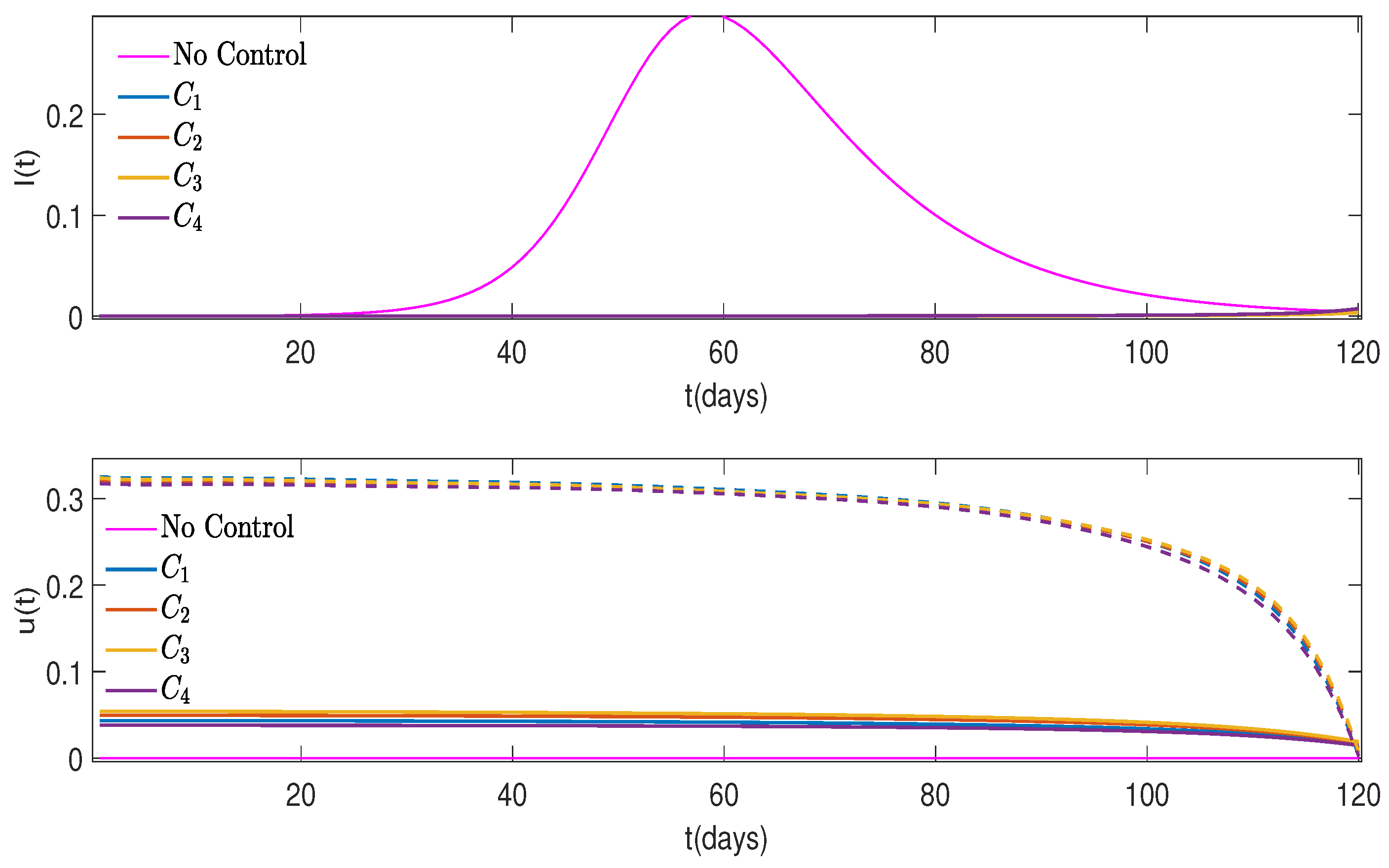
Figure 14.
The proportion of Infected people, , for different cost functions and No Control case when (on the top) and controls shown with solid lines, and with dashed lines (on the bottom).
Figure 14.
The proportion of Infected people, , for different cost functions and No Control case when (on the top) and controls shown with solid lines, and with dashed lines (on the bottom).
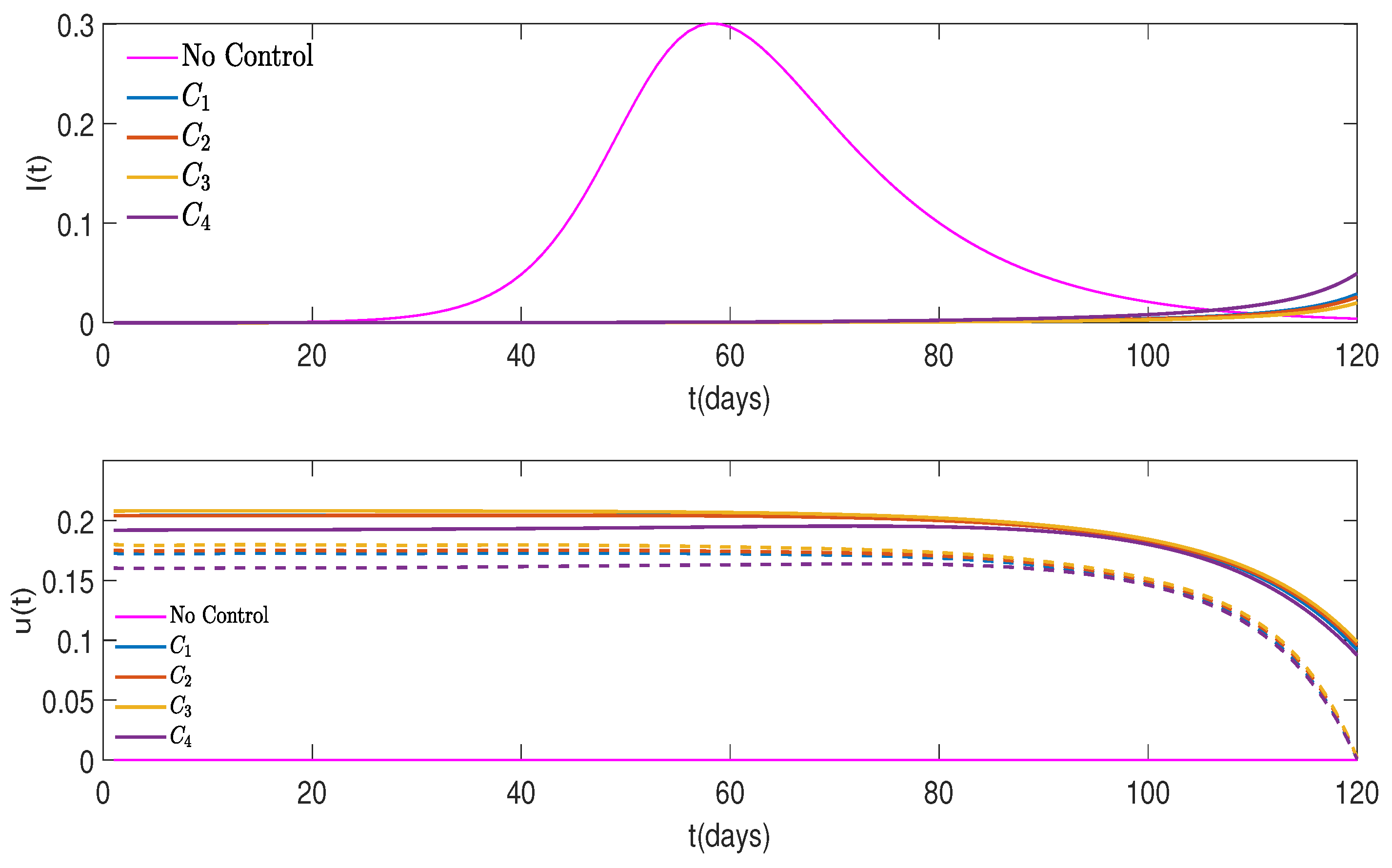
Table 1.
Comparison of for cost function in case when only control is applied and varies. As increases, the number of infected individuals, , gets higher on most days.
Table 1.
Comparison of for cost function in case when only control is applied and varies. As increases, the number of infected individuals, , gets higher on most days.
| Day | No 2nd Control | No 2nd Control | No 2nd Control | No 2nd Control | No Control |
|---|---|---|---|---|---|
| 1 | 200 | 200 | 200 | 200 | 200 |
| 10 | 85 | 253 | 315 | 387 | 1,237 |
| 20 | 34 | 329 | 527 | 812 | 9,228 |
| 30 | 15 | 432 | 880 | 1,691 | 67,606 |
| 40 | 7 | 571 | 1,466 | 3,514 | 456,639 |
| 50 | 4 | 761 | 2,447 | 7,267 | 1,985,292 |
| 60 | 3 | 1,028 | 4,089 | 14,927 | 2,987,989 |
| 70 | 2 | 1,416 | 6,873 | 30,388 | 2,015,872 |
| 80 | 1 | 2,003 | 11,678 | 61,024 | 1,023,788 |
| 90 | 1 | 2,953 | 20,264 | 120,429 | 474,813 |
| 100 | 1 | 4,643 | 36,661 | 233,756 | 213,085 |
| 110 | 1 | 8,190 | 72,008 | 453,110 | 94,393 |
| 120 | 1 | 18,714 | 174,758 | 922,708 | 41,578 |
Table 2.
Comparison of for cost function in case when only control is applied and varies. As increases, the number of infected individuals, , gets higher on most days.
Table 2.
Comparison of for cost function in case when only control is applied and varies. As increases, the number of infected individuals, , gets higher on most days.
| Day | No 1st Control | No 1st Control | No 1st Control | No 1st Control | No 1st Control | No Control |
|---|---|---|---|---|---|---|
| 1 | 200 | 200 | 200 | 200 | 200 | 200 |
| 10 | 18 | 181 | 254 | 318 | 377 | 1,237 |
| 20 | 1 | 168 | 332 | 530 | 756 | 9,228 |
| 30 | 0 | 164 | 437 | 880 | 1,503 | 67,606 |
| 40 | 0 | 166 | 581 | 1,456 | 2,949 | 456,639 |
| 50 | 0 | 177 | 782 | 2,395 | 5,693 | 1,985,292 |
| 60 | 0 | 198 | 1,073 | 3,938 | 10,735 | 2,987,989 |
| 70 | 0 | 234 | 1,515 | 6,481 | 19,547 | 2,015,872 |
| 80 | 0 | 299 | 2,226 | 10,735 | 34,005 | 1,023,788 |
| 90 | 0 | 420 | 3,485 | 18,210 | 56,943 | 474,813 |
| 100 | 0 | 676 | 6,092 | 33,048 | 95,559 | 213,085 |
| 110 | 0 | 1,391 | 13,102 | 70,339 | 177,085 | 94,393 |
| 120 | 0 | 5,265 | 49,724 | 244,998 | 499,616 | 41,578 |
Table 3.
Comparison of for all cost functions in the case when only control is applied () or only control is applied () over time.
Table 3.
Comparison of for all cost functions in the case when only control is applied () or only control is applied () over time.
| Day | No 2nd Control | No 1st Control | No 2nd Control | No 1st Control | No 2nd Control | No 1st Control | No 2nd Control | No 1st Control |
|---|---|---|---|---|---|---|---|---|
| 1 | 200 | 200 | 200 | 200 | 200 | 200 | 200 | 200 |
| 10 | 387 | 318 | 388 | 317 | 377 | 308 | 401 | 349 |
| 20 | 812 | 530 | 816 | 527 | 766 | 495 | 918 | 644 |
| 30 | 1,691 | 880 | 1,706 | 872 | 1,552 | 795 | 2,133 | 1,178 |
| 40 | 3,514 | 1,456 | 3,557 | 1,439 | 3,134 | 1,273 | 4,939 | 2,133 |
| 50 | 7,267 | 2,395 | 7,379 | 2,362 | 6,302 | 2,034 | 11,366 | 3,816 |
| 60 | 14,927 | 3,938 | 15,209 | 3,879 | 12,618 | 3,258 | 25,851 | 6,733 |
| 70 | 30,388 | 6,481 | 31,076 | 6,381 | 25,120 | 5,256 | 57,953 | 11,672 |
| 80 | 61,024 | 10,735 | 6,2623 | 10,561 | 49,586 | 8,558 | 127,302 | 19,877 |
| 90 | 120,429 | 18,210 | 123,913 | 17,880 | 96,926 | 14,338 | 266,304 | 33,825 |
| 100 | 233,756 | 33,048 | 240,619 | 32,336 | 188,180 | 25,768 | 509,874 | 60,100 |
| 110 | 453,110 | 70,339 | 463,527 | 67,697 | 367,745 | 53,756 | 899,275 | 123,379 |
| 120 | 922,708 | 244,998 | 923,332 | 229,683 | 760,101 | 183,048 | 1,511,537 | 399,149 |
Table 4.
Comparison of for cost function when there is only , only , and both applied versus No Control case over time when .
Table 4.
Comparison of for cost function when there is only , only , and both applied versus No Control case over time when .
| Day | No Control | No 2nd Control | No 1st Control | |
|---|---|---|---|---|
| 1 | 200 | 200 | 200 | 200 |
| 10 | 1,237 | 387 | 318 | 300 |
| 20 | 9,228 | 812 | 530 | 472 |
| 30 | 67,606 | 1,691 | 880 | 743 |
| 40 | 456,639 | 3,514 | 1,456 | 1,167 |
| 50 | 1,985,292 | 7,267 | 2,395 | 1,834 |
| 60 | 2,987,989 | 14,927 | 3,938 | 2,897 |
| 70 | 2,015,872 | 30,388 | 6,481 | 4,625 |
| 80 | 1,023,788 | 61,024 | 10,735 | 7,522 |
| 90 | 474,813 | 120,429 | 18,210 | 12,727 |
| 100 | 213,085 | 233,756 | 33,048 | 23,355 |
| 110 | 94,393 | 453,110 | 70,339 | 50,792 |
| 120 | 41,578 | 922,708 | 244,998 | 173,543 |
Table 5.
Cumulative number of infections up to day t, for cost function when there is only , only , and both versus No Control case over time when weight .
Table 5.
Cumulative number of infections up to day t, for cost function when there is only , only , and both versus No Control case over time when weight .
| Day | No Control | No 2nd Control | No 1st Control | |
|---|---|---|---|---|
| 1 | 200 | 200 | 200 | 200 |
| 10 | 1,756 | 643 | 898 | 772 |
| 20 | 13,747 | 1,649 | 2,156 | 1,761 |
| 30 | 101,568 | 3,735 | 4,239 | 3,312 |
| 40 | 697,572 | 8,067 | 7,686 | 5,748 |
| 50 | 3,338,392 | 17,006 | 13,356 | 9,562 |
| 60 | 7,032,920 | 35,334 | 22,686 | 15,568 |
| 70 | 8,627,485 | 72,609 | 37,993 | 25,108 |
| 80 | 9,121,747 | 147,335 | 63,222 | 40,496 |
| 90 | 9,292,217 | 294,458 | 105,246 | 66,067 |
| 100 | 9,358,556 | 579,209 | 178,417 | 111,270 |
| 110 | 9,386,082 | 1,130,270 | 320,258 | 202,389 |
| 120 | 9,397,865 | 2,256,854 | 692,160 | 454,205 |
Table 6.
Comparison of the daily number of infected people, , for the cost function with the weight for . The weights for the control are , , , and for the second, third, and fourth columns, respectively, and the fifth column shows the case of No Control over time.
Table 6.
Comparison of the daily number of infected people, , for the cost function with the weight for . The weights for the control are , , , and for the second, third, and fourth columns, respectively, and the fifth column shows the case of No Control over time.
| Day | No 2nd Control | ||||
|---|---|---|---|---|---|
| 1 | 200 | 200 | 200 | 200 | 200 |
| 10 | 180 | 251 | 300 | 321 | 387 |
| 20 | 167 | 323 | 472 | 545 | 812 |
| 30 | 163 | 421 | 743 | 925 | 1,691 |
| 40 | 165 | 554 | 1,167 | 1,561 | 3,514 |
| 50 | 175 | 737 | 1,834 | 2,629 | 7,267 |
| 60 | 195 | 1,002 | 2,897 | 4,428 | 14,927 |
| 70 | 231 | 1,404 | 4,625 | 7,481 | 30,388 |
| 80 | 291 | 2,049 | 7,522 | 12,748 | 61,024 |
| 90 | 403 | 3,188 | 12,727 | 22,274 | 120,429 |
| 100 | 646 | 5,554 | 23,355 | 41,465 | 233,756 |
| 110 | 1,306 | 11,909 | 50,792 | 89,010 | 453,110 |
| 120 | 4,879 | 44,363 | 173,543 | 280,668 | 922,708 |
Table 7.
Comparison of the daily number of infected people, , for the cost function with the weight for . The weights for the control are , , , and for the second, third, and fourth columns, respectively, and the fifth column shows the case of No Control over time.
Table 7.
Comparison of the daily number of infected people, , for the cost function with the weight for . The weights for the control are , , , and for the second, third, and fourth columns, respectively, and the fifth column shows the case of No Control over time.
| Day | No 1st Control | ||||
|---|---|---|---|---|---|
| 1 | 200 | 200 | 200 | 200 | 200 |
| 10 | 245 | 281 | 300 | 306 | 318 |
| 20 | 308 | 411 | 472 | 492 | 530 |
| 30 | 390 | 604 | 743 | 791 | 880 |
| 40 | 500 | 890 | 1,167 | 1,268 | 1,456 |
| 50 | 649 | 1,318 | 1,834 | 2,028 | 2,395 |
| 60 | 857 | 1,976 | 2,897 | 3,253 | 3,938 |
| 70 | 1,159 | 3,016 | 4,625 | 5,258 | 6,481 |
| 80 | 1,621 | 4,732 | 7,522 | 8,613 | 10,735 |
| 90 | 2,383 | 7,788 | 12,727 | 14,602 | 18,210 |
| 100 | 3,777 | 13,962 | 23,355 | 26,759 | 33,048 |
| 110 | 6,844 | 29,381 | 50,792 | 57,816 | 70,339 |
| 120 | 16,608 | 90,271 | 173,543 | 200,015 | 244,998 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



