
Submitted:
03 September 2024
Posted:
04 September 2024
You are already at the latest version
Abstract
Observer-based control is the most commonly used method in the control of electro-hydraulic servo system (EHSS) with uncertainties, but it suffers from the drawback of low accuracy under the influence of large external load forces and disturbances. To address this problem, this paper proposes a novel compensation function observer-based backstepping sliding mode control (BSMC) approach to achieve high-accuracy tracking control. In particular, the model uncertainties, including nonlinearities, parameter perturbations and external disturbances are analyzed and treated together as a lumped disturbance. Then, a fourth-order compensation function observer (CFO) is constructed, which fully utilizes the system state information to accurately estimate the lumped disturbance. On this basis, the estimate of the lumped disturbance is incorporated into the design of an backstepping sliding mode controller, allowing the control system to compensate for the disturbance effect. The stability of the closed-loop control system under the CFO and BSMC is rigorously proven through the use of Lyapunov theory, which guarantees that all the tracking error signals converge exponentially to the origin. Comparative simulations are carried out to show the effectiveness and efficiency of the proposed approach, i.e., compared with PID and ESO-based BSMC methods, the tracking accuracy is improved by 99.93% and 99.76%, respectively.
Keywords:
Lyapunov function
; electro-hydraulic servo system
; compensation function observer (CFO)
; backstepping
; sliding mode control
; observer-based control
1. Introduction
As a complex nonlinear mechatronic system, electro-hydraulic servo system (EHSS) possesses many prominent merits such as fast response, strong load capacity, high power-to-weight ratio and so on [1,2,3]. Because of these advantages, EHSS has been extensively used in modern industrial applications, such as digging robots [4,5,6], hydraulic press [7,8], and mechanical arms [9,10], etc. Nevertheless, the EHSS in practical applications always suffers from various uncertainties. On one hand, the model parameters such as load mass, effective oil bulk modulus, leakage coefficient may significantly change with working conditions, temperature and equipment wear. On the other hand, the hydraulic system has strong nonlinearities in the flow and pressure dynamics of the control valve, oil compressibility, and leakage. Furthermore, owing to the intricacy of working environment, the EHSS is inevitably susceptible to unknown external load forces and disturbances. All these uncertainties could seriously deteriorate the system control performance, or even destroy the system. Therefore, the high-precision tracking control of EHSS in the presence of uncertainties with advanced control methods still poses challenges for engineers.
Over the past decades, there have been remarkable advancements on the control of EHSS. The existing control methods can be classified into three categories: linear control [11,12,13,14,15,16,17], nonlinear control [18,19,20,21,22,23,24,25,26,27,28,29,30,31,32,33,34], and observer-based control [37,38,39,40,41,42,43,44].
The linear control algorithms, which are developed using conventional PID [11,12,13,14] or feedback linearization techniques [15,16,17], are simple and easy to implement in engineering. However, they only perform well under certain operating conditions, and fail to achieve satisfactory performance in the presence of aforementioned uncertainties including parameter permutations, nonlinearities and disturbances. To enhance the control performance of EHSS, extensive research has been conducted, and numerous advanced nonlinear control methods have been proposed, such as backstepping control, adaptive control, sliding model control and so on.
The backstepping technique is one of the most powerful tools in nonlinear control, in which the control laws are designed recursively by constructing a serious of control Lyapunov functions. The distinctive feature of this approach lies in its well-defined step-by-step design procedure, and the system stability can be rigorously guaranteed by a Lyapunov stability theory. However, the control laws designed by this method depends on the accurate model of the system. To remove this obstacle, researchers often combine it with other advanced control methods such as adaptive control, fuzzy logic system (FLS)/neural network (NN) and sliding mode control (SMC). For example, a desired compensation adaptive control framework was proposed in [18,19], where a projection-type adaptive law was designed to estimate the unknown parameters. In [20], an adaptive robust controller was developed by combining adaptive robust control with a discrete disturbance estimator, which can compensate for unknown parameters, nonlinearities and external disturbances. Unfortunately, the adaptive design process is usually required to be linearly parameterized with unknown constant parameters, which is not always satisfied for the complex EHSS. By employing FLS to approximate nonlinearities, parameter uncertainties and external disturbances, adaptive fuzzy backstepping controllers were presented in [21,22,23,24]. Similarly, taking advantage of the universal approximation ability of NN, adaptive backstepping NN control schemes have been extensively proposed in [25,26,27]. However, the control algorithms using FLS/NN are usually computationally expensive, since FLS relies heavily on the knowledge rules of expert and NN requires either on-line learning or off-line training procedures to make the controller perform properly.
SMC is famous for its insensitivity to uncertainties in the manner of constructing a sliding mode surface. Once the system states reach the surface, the controller has strong robustness against uncertainties. In view of this excellent feature, several control strategies that combine backstepping and SMC have been proposed in [28,29,30,31] to improve the robustness of EHSS with backlash links, non-structural uncertainties or dead-zones. Furthermore, by incorporating NNs, adaptive NN sliding mode control approaches were presented in [32,33,34] for EHSS to achieve a high tracking accuracy.
Observer-based control has been proved to be a powerful technique to address uncertainties. The basic idea of this methodology is to design an observer to estimate the uncertainties and compensate for the effect in the control loop. Typical observers include high-gain observer (HGO), nonlinear disturbance observer (NDO), adaptive observer (AO), sliding mode observer (SMO), and extended state observer (ESO). Among them, ESO is the most classical disturbance estimation method, which regards the internal and external disturbance of the system as an extended system state variable [35,36]. In [37,38,39], three ESO-based sliding model controllers are proposed for EHSS, in which ESO is used to estimate the lumped disturbance while the convergence of the system state is guaranteed by SMC technique. In addition, employing ESO with backstepping, a variety of control strategies such as ESO-based finite-time backstepping control [40,41], ESO-based adaptive backstepping control [42], and ESO-based backstepping robust control [43,44], have been proposed. Nevertheless, the ESO still has some drawbacks in the estimation accuracy and system convergence. It has been verified in [45] that the structure of ESO can be equivalent to a Type-I tracking system, which means zero steady-state error convergence can only be achieved in the presence of constant disturbances.
According to the above literature review and analysis, it is evident that ESO-based control combined with SMC in the framework of backstepping is the most powerful and effective method for the control of EHSS in the presence of complex nonlinearities and uncertainties. However, the dynamics and disturbances of EHSS are dynamically changing, i.e., they are not constant. When employing the ESO-based backstepping sliding model control method, it faces challenging problems of low estimation accuracy and big estimation lag. Although increasing the ESO gains may improve the estimation accuracy, it would also amplify noises, leading to the so-called peaking phenomenon [46,47], or even system instability. Therefore, the improved backstepping SMC design based on the observer to handle this issue still needs further investigation. Recently, a novel compensation function observer (CFO) with a pure integral structure was proposed by Qi et al. in [45]. By introducing velocity information and using a first-order filter or integrator as a compensation function, the CFO becomes a Type-III system, which enable it to estimate constant, slope and acceleration disturbances or uncertainties below with zero steady-state error. Due to these advantages, CFO was extensively applied to the attitude control of quadrotor aircraft [48,49], yielding favorable control outcomes. However, the application of CFO on EHSS has not been reported.
Motivated by the above observations, this paper exploits a novel CFO-based backstepping sliding model control (CFO-BMSC) approach to enhance the tracking accuracy of EHSS subjected to various uncertainties. The nonlinearities and disturbances of EHSS are first analyzed, and the model equation is rearranged as a appropriate form, where all the uncertainties affecting the system including unknown frictions, parameter perturbations and external disturbances are collectively treated as a lumped disturbance. Then, inspired by the unique feature of compensation function, a fourth-order CFO is employed to estimate the lumped disturbance accurately, which is in turn incorporated into the control design to compensate for the effect of the disturbance. Furthermore, in the framework of backstepping, a sliding model controller is designed to stabilize all the tracking errors. The primary features and contributions of the proposed approach are underlined as follows.
- (1)
- Different from previous ESO-based methods (e.g., [37,40,41,43]), the CFO adopts a Type-III structure and fully utilizes system state information, which make it capable of estimating the disturbance with higher estimation accuracy. Detailed comparisons between the performance of ESO and CFO in estimation of different disturbances are examined by extensive comparison simulations.
- (2)
- In comparison with conventional PID and ESO-based BSMC [12,47], the proposed CFO-BMSC tracks the reference trajectory with no phase lag under the influence of large external load forces and disturbances, and the tracking accuracy is increased by and respectively, obtaining better transient and steady-state tracking performances. To our best knowledge, this is the first attempt to incorporate CFO into the backstepping sliding mode control of EHSS.
- (3)
- The stability of the overall system including the CFO and BSMC is rigorously analyzed by Lyapunov stability theory, which guarantees that the closed-loop control system is exponentially stable, and the tracking errors converge to the origin.
The remainder of this paper is organized as follows. The nonlinear mathematical model of the EHSS under study is given in Section 2. The control system design including compensation function observer, sliding mode backstepping controller, and the system stability analysis are presented in Section 3. Simulation results with comparisons are shown in Section 4, and conclusion remarks are finally given in Section 5.
2. System Modeling and Problem Description
Figure 1 is the working principle diagram of the electro-hydraulic servo system (EHSS), which is consisted of an electro-hydraulic servo valve and a hydraulic cylinder. The load is controlled by an electro-hydraulic servo valve, which converts the received electrical signal into a hydraulic signal, and then drive the hydraulic cylinder. For the considered EHSS in Figure 1, m is the mass of the load, A is the ram area of the chamber, is the piston displacement, is the servo valve spool displacement, is the unmodeled friction and unknown disturbances in the systems, is the pressure inside the left chamber of the hydraulic cylinder, is the pressure inside the right chamber of the hydraulic cylinder, is the supplied flow rate to the two chambers, is the return flow rate to the two chambers, is the supply pressure.
According to Newton’s second law, the dynamic equation of the hydraulic cylinder is
where is the load pressure in the hydraulic actuator, ; B is the coefficient of the viscous friction force. Considering the effect of internal leakages, the load pressure dynamics can be defined as [19]
where is the effective oil bulk modulus; is the load flow, ; is the coefficient of the total internal leakage of the hydraulic cylinder.
Given that the response of the servo valve is much higher than the hydraulic cylinder, the relationship between the spool displacement and the control input is approximated as , where is a positive constant. The load flow can be obtained [19]
where is the flow gain, , is the flow coefficient, is the area gradient of the servo valve, is the oil density.
Define as the state variables, then from (1)-(3), the state-space equation of the EHSS is expressed as
where
Note that and are certain constants, both of which are related to the system parameters. In practice, it is often difficult to obtain accurate system parameters, so there exist uncertain parts for and , which can be denoted as and . The term F includes unmodeled dynamics such as frictions and unknown external disturbances. In this paper, all the mentioned uncertainties are treated as a lumped disturbance , which can be expressed as
Thus, the Equation (4) is rewritten as
where is the known nominal part of the EHSS model, and is the unknown lumped disturbance. In this paper, an CFO is designed to estimate in real time, and the estimate value is fed back to the controller to compensate for the effect of such that the output can track the desired trajectory quickly and accurately.
3. Control Design
In this sction, an overview of the structure of the proposed control scheme is first presented and described. Then, a compensation function observer (CFO) is designed to accurately estimate the lumped disturbance in real time, on the basis of which a backstepping sliding mode controller is designed to achieve the trajectory tracking control.
3.1. Structure of the Proposed Hierarchical Control Scheme
Figure 2 shows the structure of the proposed hierarchical backstepping sliding mode control scheme based on CFO for the EHSS with uncertainties. By using the backstepping method for the EHSS model, the present control strategy is divided into two control loops, which are named as virtual control loop and actual control loop. In the virtual control loop, the goal is to design virtual control laws and to ensure tracks ideally, while in the actual control loop, it aims to design a final control law to stabilize the tracking errors of intermediate variables. By taking the unknown lumped disturbance into consideration, a novel CFO is adopted in the actual loop to provide a real-time accurate estimate of the lumped disturbance.
3.2. Design of Compensation Function Observer
To estimate disturbances with high accuracy, an CFO was recently proposed in [45]. Before employing this kind of obsever, expanding in (4) as a new state, i.e., yields
Then, for (8), a fourth-order CFO is designed as
where are the states of the CFO, is the vector of positive gain parameters, , and is a positive filtering factor. Note that is a compensation term corresponding to in (8), but , which is the big difference from ESO and why the observer is called compensation function observer [48].
Define as the estimates of and are the estimation errors, then from (8) and (9), it obtains
and
Furthermore, the time derivative of (10) is obtained as
Subtracting (12) from (8) yields
where and
Based on the above design procedure, the stability of the CFO and the convergence of the estimation errors are given in the following theorem.
Theorem 1.
Consider the CFO designed in (9) for the EHSS with lumped unkown disturbance . Suppose that is fourth-order infinitesimal, if the gain parameters are chosen satisfying
then the CFO is exponentially stable and the steady-state estimation error of the lumped disturbance is zero.
Proof.
From (14), the characteristic equation of is calculated as
and the Routh array of is calculated as follows.
| 1 | |||
| 0 | |||
According to the Routh-Hurwitz criterion, the system with is exponential stable if all the elements in the first column of the Routh array are positive, i.e., inequalities (9) hold. Furthermore, since is fourth-order infinitesimal, the fourth derivative is zero, i.e., . Taking the time derivative of (13) three times yields
Because of the stability of , it obtains
i.e.,
Therefore, the steady-state estimation error of the lumped disturbance is zero.
This completes the proof of Theorem 1. □
Remark 1.
It is worth noting that the CFO designed by Equation (9) has four gain parameters (), and the condition (15) is a little harsh for the parameter tuning of the CFO. However, a method of pole assignment can be employed to facilitate the search for parameters and ensure the stability of the system. The characteristic equation of the CFO can be rewritten as
where , is the bandwidth; are the poles of the CFO, having the relationship with the gain parameters as follows.
One solution of the above equations can be obtained as
Since ω is the only adjustable parameter, the selection of the gain parameters is quite simple. Generally speaking, a big bandwidth obtains a better observation performance. However, it may amplify the influence of high-frequency noise to the system, and even worse cause the instability of the control system. Therefore, the bandwidth should be suitablely selected by a trial and error method.
3.3. Design of Backstepping Sliding Mode Controller
Based on the CFO, backstepping technique integrated with sliding mode control is employed to design a controller to achieve the position tracking control objective.
Firstly, the tracking errors are defined as
where is the desired trajectory, and and are virtual control laws to be designed step by step as follows.
Step 1: To stabilize , the first Lyapunov function is chosen as:
Based on (23), the derivative of is computed by
To make negative, the virtual control law is chosen as
where is a positive design parameter. Substituting (26) into (25) yields
Obviously, if , then .
Step 2: Similarly, to stabilize , the second Lyapunov function is chosen as:
Based on (23) and (27), the derivative of is obtained as
To make negative, the virtual control law is chosen as
where is a positive design parameter. Then, substituting (30) into (29) yields
If , then .
Step 3: To design a final actual control law for u, a sliding mode surface is chosen as
where and are positive design parameters. Taking the time derivative of S and using (8) yields
where with
The final Lyapunov function is chosen as
Based on (33), the derivative of is obtained as
To make negative, the actual control law u is designed as
where is the estimate of the lumped disturbance from the CFO in (9), and is a positive design parameter.
Summarizing the above results obtains the following theorem for the stability of the closed-loop control system.
Theorem 2.
Consider the EHSS with lumped disturbance described by (7). If the estimate of the lumped disturbance is employed from the CFO (9) and the design parameters are selected such that , then the backstepping sliding mode control laws (26), (30) and (37) guarantee that the closed-loop system is exponentially stable, and the tracking error signals converge to the origin.
Proof.
According to Theorem 1, the estimation error of CFO converges to zero, i.e.,
In the sense of limiting, Equation (38) becomes
Using the Young’s inequality for the last two terms of (40) obtains
Substituting (41) into (40) yields
Rewriting inequality (42) in a compact form, it obtains
where
Selecting the design parameters to ensure . Then, the solution of (43) is
which means that converges exponentially to zero, i.e., as , and . Therefore, the proposed CFO-based backstepping sliding model controller guarantees the stability of the closed-loop system of the EHSS, and the tracking errors converge to zeros.
This completes the proof of Theorem 2. □
4. Simulation Results and Analysis
To evaluate the effectiveness and efficiency of the proposed control scheme for the EHSS, two different working cases are simulated in the MATLAB/SIMULINK platform. The first case is to track an exponential trajectory with a relatively small disturbance, while the second case is to track a sinusoidal position trajectory with a large disturbance.
In all simulations, the system parameters such as coefficient of the viscous friction force B and leakage coefficient of the system are assumed to be perturbed, which result in the uncertain parts and in (6) as: and . The nominal physical parameters of the EHSS are listed in Table 2.
In addition, to illustrate the superiority of the proposed control approach, the following controllers are performed as comparison schemes.
- (1)
- CFO-BSMC: This is the proposed backstepping silding mode controller based on CFO presented in Section 3. By trial and error, the parameters of the controller in (26), (30) and (37) are selected as , =2000. The bandwidth of the proposed CFO in Remark 1 is chosen as . Therefore, the gain parameters of the CFO are .
- (2)
- ESO-BSMC: This is the backstepping silding mode controller based on the ESO proposed in [47]. To ensure a fair comparison, the parameters of the controller are chosen as the same as those in CFO-BSMC. In addition, the poles of the ESO are assigned as the same as CFO, having the characteristic equation , where are gain parameters of the ESO. The bandwidth is also chosen as , which results in . Note that the maximum gainof the ESO is 240 times that of the CFO.
- (3)
- PID: This is the well-known proportional-integral-derivative (PID) controller which has a wide range of application in industry [12]. By trial and error, the gain parameters of the PID controller are tuned as . It is notable that larger gains would achieve better tracking performance. However, it also may cause instability under the influence of lumped disturbances. Therefore, the gain parameters are ultimately obtained by the trial and error method.
4.1. Case 1: Tracking an exponential-position trajectory
In this case, the desired trajectory is selected as an exponential signal whose initial state is zero and steady state is 0.005 m, i.e., m, and a time-varying sinusoidal external disturbance N is imposed to the EHSS.
The simulation results of the EHSS under the three controllers are depicted in Figure 3, Figure 4, Figure 5 and Figure 6, which record tracking performance, the tracking errors, the estimation performance for the lumped disturbance, and the control input, respectively.
As seen from Figure 3, the proposed controller achieves superior tracking control performance over the other two controller in the presence of parameter perturbations and time-varying sinusoidal disturbance. Specifically, by comparing the tracking error curves in Figure 4 during the transient and steady stages, it is evident that the tracking error of PID controller fluctuates more seriously than that of ESO-BSMC, as well as CFO-BSMC. The reason for this is that the lumped disturbance can be estimated and compensated by both ESO and CFO. Furthermore, by examining the estimation curves of ESO and CFO in Figure 5, it is apparent that CFO obtains a higher estimation accuracy than ESO under the same bandwidth. Figure 6 exhibits that the control signals of the three controller are smooth, continuous and bounded. This group of simulation results demonstrate the effectiveness and superiority of the proposed controller.
4.2. Case 2: Tracking a sinusoidal position trajectory
To further test the tracking performance of the proposed controller, a smooth sinusoidal desired trajectory is employed as sin() m. In addition, a large external disturbance is injected into the system to examine the robustness of the proposed controller. The disturbance is given as N, which is composed of a large constant load force and a large time-varying sinusoidal disturbance.
The output tracking performance of the three controllers is presented in Figure 7. As seen, the three controllers are able to drive the output of the EHSS close to the desired trajectory. Furthermore, a comparative result of tracking errors is shown in Figure 8, which indicates that the proposed CFO-BSMC has the smallest tracking error, followed by ESO-BSMC, and the worst is PID, which means the proposed controller achieves the best transient and steady state tracking performance. Moreover, by comparing the estimation performances between CFO and ESO in Figure 9, it is evident that the ESO presents a phase lag in estimating the disturbance, while the proposed CFO can estimate the disturbance accurately. The smooth, continuous and bounded control signals are shown in Figure 10.
In order to quantitatively analyze the control performance of the three controllers, three performance indices are introduced as follows [18]:
(1) Mean Absolute Error:
(2) Root Mean Square Error:
(3) Integrated Time Absolute Error:
where is the simulation step.
The obtained comparison results of the performance indices under the three controllers are presented in Table 3. It is clearly seen that all the indices of the proposed CFO-BSMC are the smallest among the three controllers. More specifically, compared with PID and ESO-BSMC, the mean absolute error of the proposed CFO-BSMC is increased by and , and the the root mean square error is improved by and , respectively. These results verify that the proposed control approach achieves the best tracking accuracy. In addition, the integrated time absolute error is to weight the tracking error by time, which represents the system insensitivity to initial error and sensitivity to the steady error. Oblivious, the of the proposed controller is smallest, which means the proposed controller performs the best robustness against external disturbances.
The simulation results in this group demonstrate that even in the presence of large external disturbances and system perturbations, the proposed control method can effectively estimate the lumped disturbance and compensate for its effect, achieving a high-precision tracking control for sinusoidal trajectory.
5. Conclusions
In this paper, a novel CFO-based backstepping sliding model control method was proposed for the high-accuracy tracking control of EHSS in the presence of various uncertainties including nonlinearities, parameter perturbations and external disturbances. This method was founded upon the treatment of uncertainties as a lumped disturbance, on the basis of which a fourth-order CFO was presented to estimate the lumped disturbance accurately, and the estimate value was used for the compensation of the disturbance effect. A sliding model controller was developed by integrating the CFO into the backstepping design procedure. The stability of the closed-loop control system was rigorously proved by using Lyapunov theory, and all the tracking error signals were guaranteed to converge exponentially to the origin. Simulation results demonstrated that the proposed CFO delivered accurate estimate of the lumped disturbance, and compared with PID and ESO-based BSMC methods, the tracking accuracy was improved by and respectively.
It is worth mentioning that due to the limitations of working conditions and hardware equipments, there always exist some constraints on the input or output in the practical application of EHSS. In order to improve the practicality of the control method, it will be interesting to exploit a controller with the input or output constraint, which needs to investigate in the future work.
Author Contributions
Conceptualization, C.P.; methodology, Y.W.; validation, C.P. and Y.W.; investigation, Y.W. and Z.L.; writing—original draft preparation, Y.W.; writing—review and editing, C.P. and S.Y.; supervision, C.P. and Z.L.; project administration, C.P. and J.X. All authors have read and agreed to the published version of the manuscript.
Funding
This work is supported in part by: (i) National Natural Science Foundation of China (Grant No. 62173138); (ii) Guangdong Basic and Applied Basic Research Foundation (Grant No. 2020A1515011082 and No. 2019A1515010955); (iii) Hunan Provincial Natural Science Foundation of China (Grant No. 2022JJ30263 and No. 2023JJ40286).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
Not applicable.
References
- Bonchis, A.; Corke, P, I.; Rye, D, C.; Ha, Q, P. Variable structure methods in hydraulic servo systems control. Automatica. 2001, 37,589-595. [CrossRef]
- Vladimir, M.; Željko, Š.; Mario, E. Robust H∞ position control synthesis of an electro-hydraulic servo system. ISA Transactions. 2010, 49,535-542. [CrossRef]
- Muhammad, B, N.; Wang, S, P. Optimization based on convergence velocity and reliability for hydraulic servo system. Chinese Journal of Aeronautics. 2009, 22,407-412. [CrossRef]
- Feng, H.; Ma, W.; Yin, C, B.; Cao, D, H. Trajectory control of electro-hydraulic position servo system using improved PSO-PID controller. Automation in Construction. 2021, 127,103722. [CrossRef]
- Chen, C.; Zhu, Z, H.; Hammadc, A. Automated excavators activity recognition and productivity analysis from construction site surveillance videos. Automation in Construction. 2020, 110,103045. [CrossRef]
- Keles, A.; Yildirim, M. Improvement of mechanical properties by means of titanium alloying to steel teeth used in the excavator. Engineering Science and Technology, an International Journal2020, 23,1208-1213. [CrossRef]
- Dindorf, R.; Wos, P. Energy-Saving Hot Open Die Forging Process of Heavy Steel Forgings on an Industrial Hydraulic Forging Press. Energies. 2020, 13,1620. [CrossRef]
- Liu, Y.; Shu, Y.; Xu, Z.; Zhao, X.; Chen, M. Energy efficiency improvement of heavy-load hydraulic fine blanking press for sustainable manufacturing assisted by multi-stages pressure source system. Proceedings of the Institution of Mechanical Engineers, Part B: Journal of Engineering Manufacture. 2024. [CrossRef]
- Xie, Q.; Zhang, Y.; Wang, T.; Zhu, S. Dynamic response prediction of hydraulic soft robotic arms based on LSTM neural network. Proceedings of the Institution of Mechanical Engineers, Part I, Journal of Systems and Control Engineering. Electronics. 2023. 237,1251-1265. [CrossRef]
- Zhang, X, F.; Shi, G, L. Dual extended state observer-based adaptive dynamic surface control for a hydraulic manipulator with actuator dynamics. Mechanism and Machine Theory. 2022, 169,104647. [CrossRef]
- Chen, J, P.; Lu, B, C.; Fan, F.; Zhu, S, C.; Wu, J, X. A Nonlinear PID controller for electro-hydraulic servo system based on PSO algorithm. Applied Mechanics and Materials. 2012, 141, 157-161. [CrossRef]
- Karam, M, E.; Jiao, Z, X.; Zhang, H, Q. PID controller optimization by GA and its performances on the electro-hydraulic servo control system. Chinese Journal of Aeronautics. 2008, 21,378-384. [CrossRef]
- Kasprzyczak, L.; Macha, E. Selection of settings of the PID controller by automatic tuning at the control system of the hydraulic fatigue stand. Mech Syst Signal Process. 2008, 22, 1274–88. [CrossRef]
- Amiri, M.; Ramli, R.; Ibrahim, M. Hybrid design of PID controller for four DoF lower limb exoskeleton. Appl Math Model. 2019, 72, 17–27. [CrossRef]
- Honorine, A, M.; Ravinder, V.; Jean, P, K.; Christian, B. Feedback linearization-based position control of an electrohydraulic servo system with supply pressure uncertainty. IEEE Transactions on Control Systems Technology. 2012, 20, 1092-1099. [CrossRef]
- Aleksey, A, K. Feedback linearization of nonlinear singularly perturbed systems with state-dependent coefficients. International Journal of Control. 2020, 18, 1743-1750. [CrossRef]
- Angue, M, H.; Venugopal, R.; Kenne, J, P.; Belleau, C. Feedback linearization-based position control of an electrohydraulic servo system with supply pressure uncertainty. IEEE Transactions on Control Systems Technology. 2012, 20, 1092-1099. [CrossRef]
- Yao, J, Y.; Deng, W, X.; Sun, W, C. Precision motion control for electro-hydraulic servo systems with noise alleviation, a desired compensation adaptive approach. IEEE/ASME Transactions on Mechatronics. 2017, 22, 1859-1868. [CrossRef]
- Yang, G, C.; Y, J, Yao. High-precision motion servo control of double-rod electro-hydraulic actuators with exact tracking performance. ISA Transactions. 2020, 103, 266-279. [CrossRef]
- Feng, L, J.; Yan, H. Nonlinear adaptive robust control of the electro-hydraulic servo system. Applied Sciences (Switzerland). 2020, 10, 4494. [CrossRef]
- Li, X.; Zhu, Z, C.; Rui, G, C.; Cheng, D.; Shen, G.; Tang, Y. Force loading tracking control of an electro-hydraulic actuator based on a nonlinear adaptive fuzzy backstepping control scheme. Symmetry. 2018, 10, 155. [CrossRef]
- Yan, C.; Xia J.; Liu X.; Yue H.; Li C. Adaptive backstepping control of high-order fully actuated nonlinear systems with event-triggered strategy. Intelligence & Robotics 2023, 3(2), 176-89. [CrossRef]
- Zaare, S.; Soltanpour, M, R. Optimal robust adaptive fuzzy backstepping control of electro-hydraulic servo position system. Transactions of the Institute of Measurement and Control. 2022, 44, 1247-1262. [CrossRef]
- Li, J, F.; Ji, R, H.; Liang, X, L.; Ge, S, S.; Yan, H. Command filter-based adaptive fuzzy finite-time output feedback control of nonlinear electrohydraulic servo system. IEEE Transactions on Instrumentation and Measurement. 2022, 71, 1-10. [CrossRef]
- Niu, S, S.; Wang, J, Z.; Zhao, J, B.; Shen, W. Neural network-based finite-time command-filtered adaptive backstepping control of electro-hydraulic servo system with a three-stage valve. ISA Transactions. 2024, 144, 419-435. [CrossRef]
- Wan, Z, S.; Yue, L, W.; Fu, Y. Neural network based adaptive backstepping control for electro-hydraulic servo system position tracking. International Journal of Aerospace Engineering. 2022, 2022, 1-16. [CrossRef]
- Truong, H, V, A.; S, N.; Kim, S.; Kim, Y, W.; Chung, W, K. Backstepping-sliding-mode-based neural network control for electro-hydraulic actuator subject to completely unknown system dynamics. IEEE Transactions on Automation Science and Engineering. 2023. [CrossRef]
- Dang, X.; Zhao, X.; Dang, C. Incomplete differentiation-based improved adaptive backstepping integral sliding mode control for position control of hydraulic system. ISA transactions. 2021, 109, 199-217. [CrossRef]
- Cao, Q, Y.; Su, X, Y. Generalized super-twisting backstepping sliding mode control for electro-hydraulic servo systems considering the coexistence of matched and mismatched uncertainties. Applied Sciences. 2023, 13, 4931. [CrossRef]
- Li, J.; Li, W.; Du, X. Adaptive backstepping sliding mode compensation control for electro-hydraulic load simulator with backlash links. International Journal of Robust and Nonlinear Control. 2024, 34, 8724-8743. [CrossRef]
- Wang, F.; Chen, G.; Liu, H.; Yan, G.; Zhang, T.; Liu, K.; Liu, Y.; Ai, C. Research on position control of an electro–hydraulic servo closed pump control system. Processes. 2022, 10, 1674. [CrossRef]
- Feng, H.; Song, Q, Y.; Ma, S, L.; Ma, W.; Yin, C, B.; Cao, D, H.; Yu, H, F. A new adaptive sliding mode controller based on the RBF neural network for an electro-hydraulic servo system. ISA Transactions. 2022. 29, 472-484. [CrossRef]
- Chen, X, C.; Li, D.; Yang, X, B.; Yu, Y, C. Identification Recurrent Type 2 Fuzzy Wavelet Neural Network and L2-Gain Adaptive Variable Sliding Mode Robust Control of Electro-Hydraulic Servo System (EHSS). Asian Journal of Control. 2018. 20, 1480-1490. [CrossRef]
- Guo, X, P.; Wang, H, S.; Liu, H. Parameter adaptive based neural network sliding mode control for electro-hydraulic system with application to rock drilling jumbo. International Journal of Adaptive Control and Signal Processing. 2024. 38, 2554-2569. [CrossRef]
- Han, J, Q. From PID to Active Disturbance Rejection Control. IEEE Transactions on Industrial Electronics. 2009. 56(3), 900-906. [CrossRef]
- He, C.; Sun H.; Wu Q.; Su Y.; Sun N. GPI observer-based active disturbance rejection control for a morphing quadrotor. Intelligence & Robotics. 2023, 3(3): 274-87. [CrossRef]
- Zhuang, H, X.; Sun, Q, L.; Chen, Z, Q. Sliding mode control for electro-hydraulic proportional directional valve-controlled position tracking system based on an extended state observer. Asian Journal of Control. 2021. 23, 1855-1869. [CrossRef]
- Zou, Q. Extended state observer-based finite time control of electro-hydraulic system via sliding mode technique. Asian Journal of Control. 2022. 24, 2311-2327. [CrossRef]
- LAO, L, M.; Chen, P, Z. Adaptive sliding mode control of an electro-hydraulic actuator with a kalman extended state observer. IEEE Access. 2024. 12, 8970-8982. [CrossRef]
- Shen, W.; Shen, C. An extended state observer-based control design for electro-hydraulic position servomechanism. Control Engineering Practice. 2021. 109, 104730. [CrossRef]
- Meng, F, L.; Yan, H.; Li, J, F.; Liu, X. Finite-time backstepping control for electro-hydraulic servo system via extended state observer with perturbation estimation performance improvement. Machines. 2022. 10, 1163. [CrossRef]
- Liang, Q, K.; Cai, Y.; Song, J, C.; Wang, B, L. A novel ESO-based adaptive RISE control for asymptotic position tracking of electro-hydraulic actuator systems. Transactions of the Institute of Measurement and Control. 2024. 46, 1134-1145. [CrossRef]
- Yang, G, C. Dual extended state observer-based backstepping control of electro-hydraulic servo systems with time-varying output constraints. Transactions of the Institute of Measurement and Control. 2020. 42, 1070-1080. [CrossRef]
- Nguyen, M, H.; Ahn, K, K. Output feedback robust tracking control for a variable-speed pump-controlled hydraulic system subject to mismatched uncertainties. Mathematics. 2023. 11, 1783. [CrossRef]
- Qi, G, Y.; Li, X.; Chen, Z, Q. Problems of extended state observer and proposal of compensation function observer for unknown model and application in UAV. IEEE Transactions on Systems, Man, and Cybernetics: Systems. 2022. 52, 2899-2910. [CrossRef]
- Shao, X, L.; Wang, H, L. Back-stepping active disturbance rejection control design for integrated missile guidance and control system via reduced-order ESO. ISA Transactions. 2015. 57, 10-22. [CrossRef]
- Guo, B, Z.; Zhao, Z, L. On the convergence of an extended state observer for nonlinear systems with uncertainty. Systems & Control Letters. 2011. 60(6), 420-430. [CrossRef]
- Qi, G, Y.; Deng, J, H.; Li, X.; Yu, X, C. Compensation function observer-based model-compensation backstepping control and application in anti-inference of quadrotor UAV. Control Engineering Practice. 2023. 140, 105633. [CrossRef]
- Qi, G, Y.; Hu, J, B.; Li, L, Y.;Li, K. Integral compensation cunction observer and its application to disturbance-rejection control of QUAV attitude. IEEE Transactions on Cybernetics. 2024. 54, 4088-4099. [CrossRef]
Figure 1.
Schematic diagram of electro-hydraulic servo system.
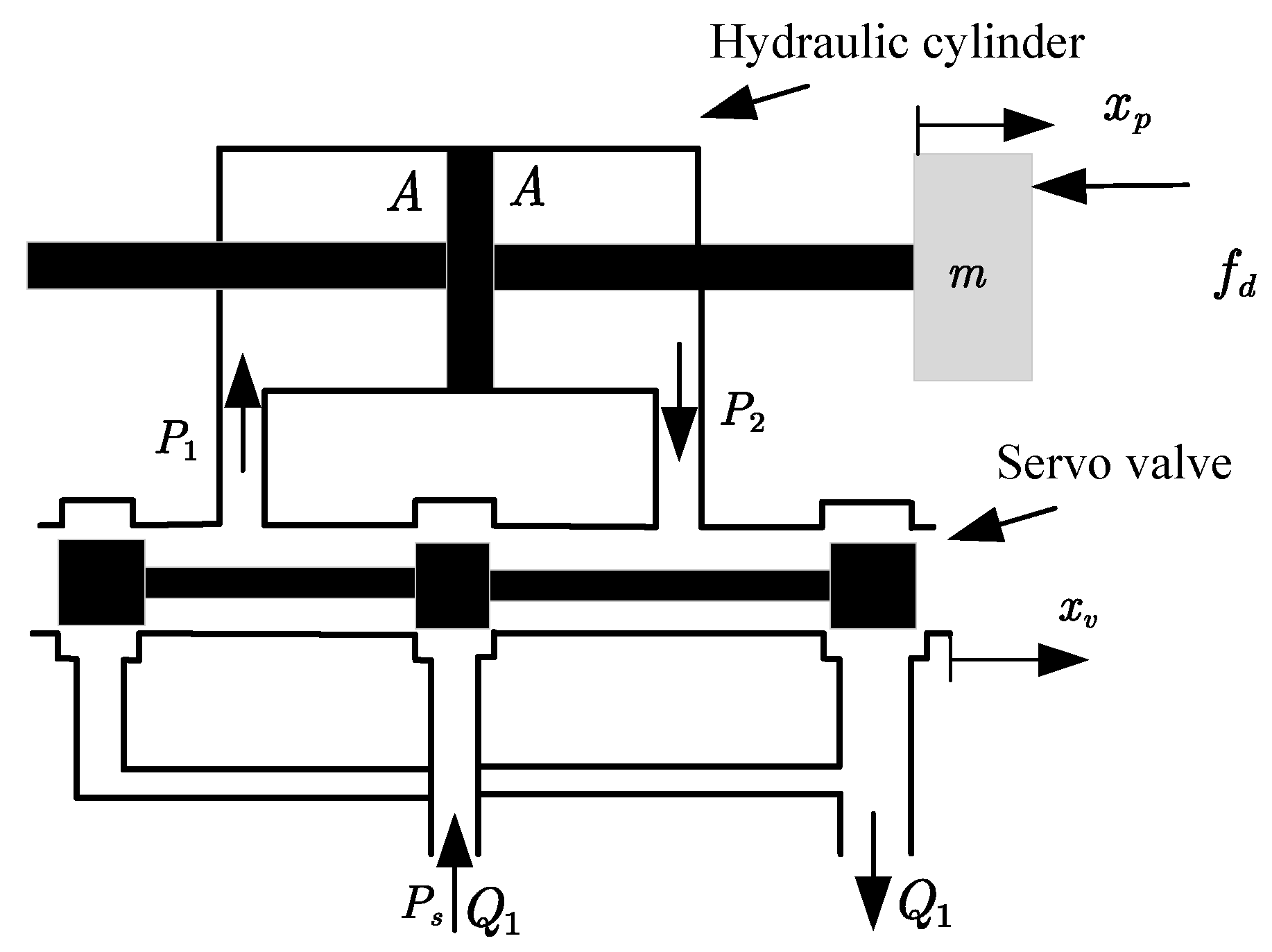
Figure 2.
The structure of the proposed hierarchical control scheme based on CFO for EHSS
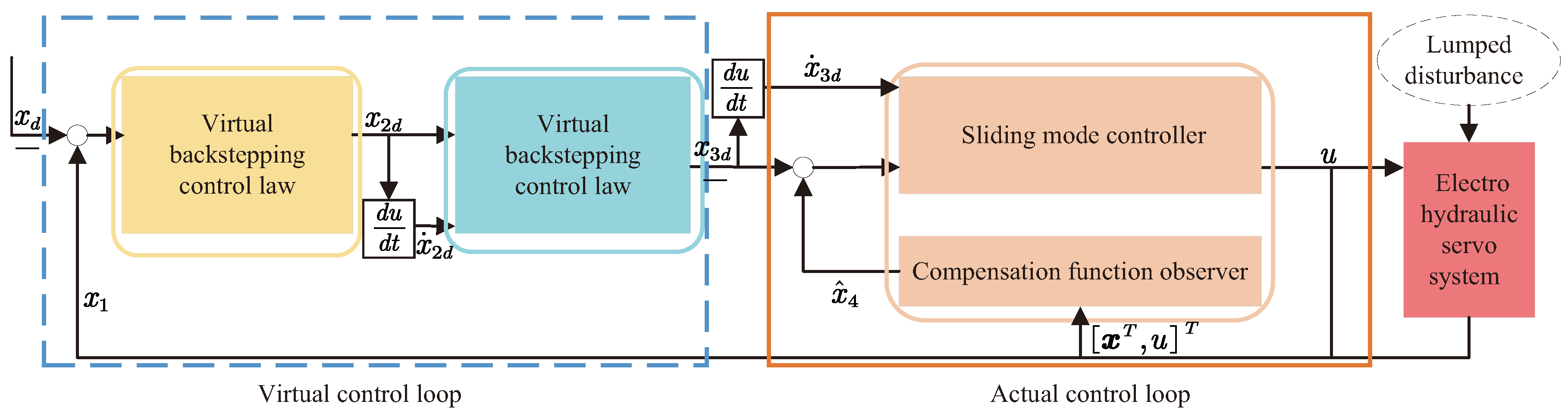
Figure 3.
Comparison tracking performance in Case 1.
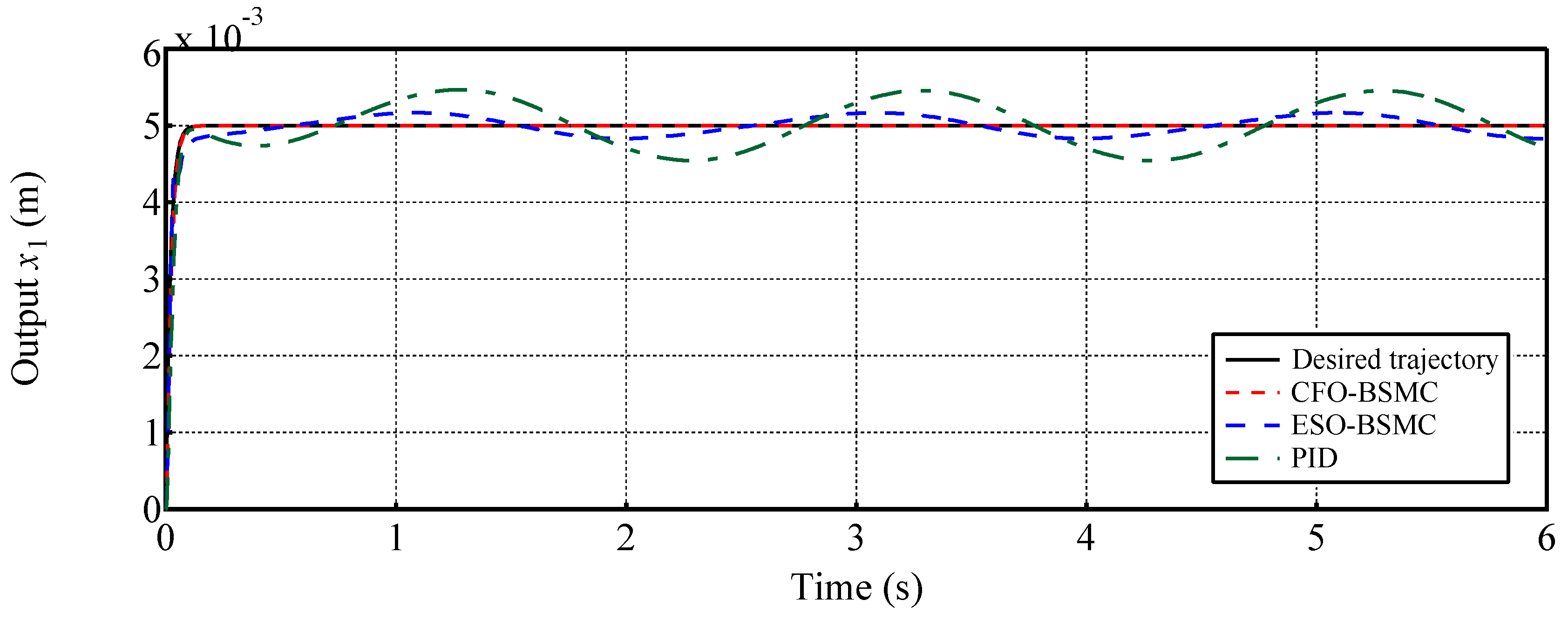
Figure 4.
Comparison tracking errors in Case 1.
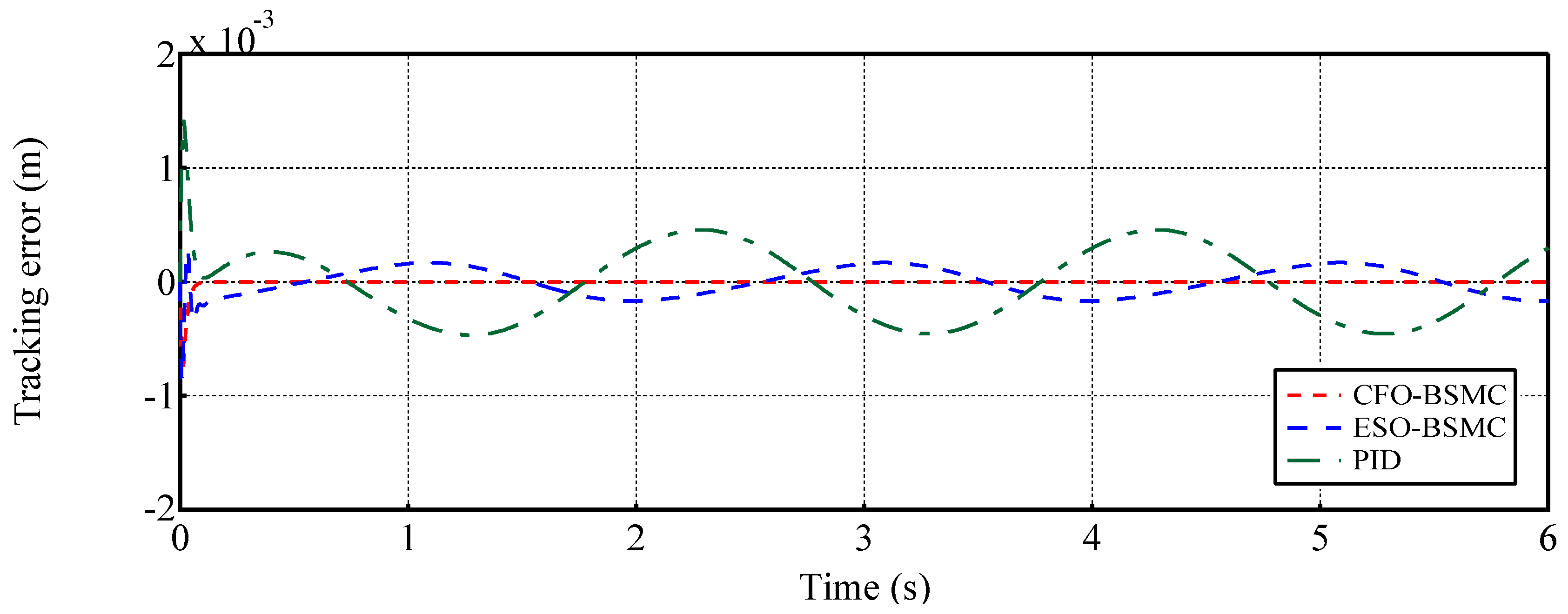
Figure 5.
Comparison estimation performance for the lumped disturbance in Case 1.
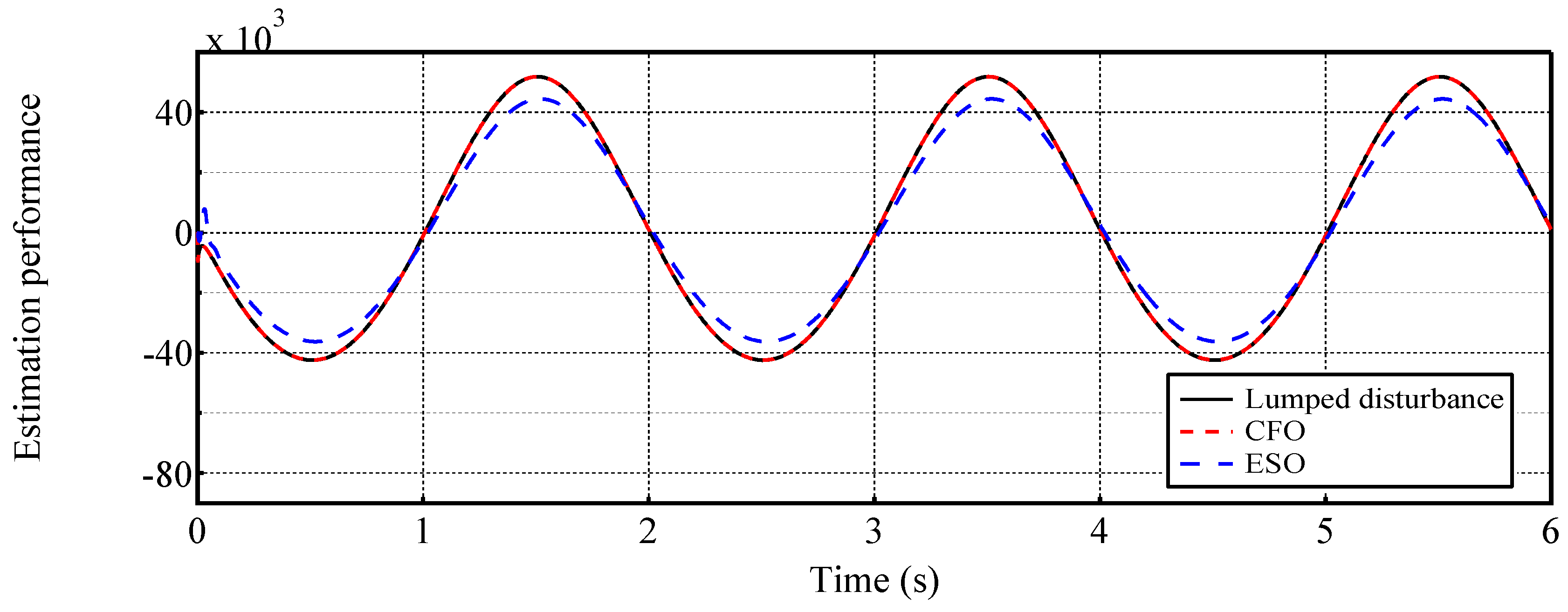
Figure 6.
Comparison control input in Case 1.
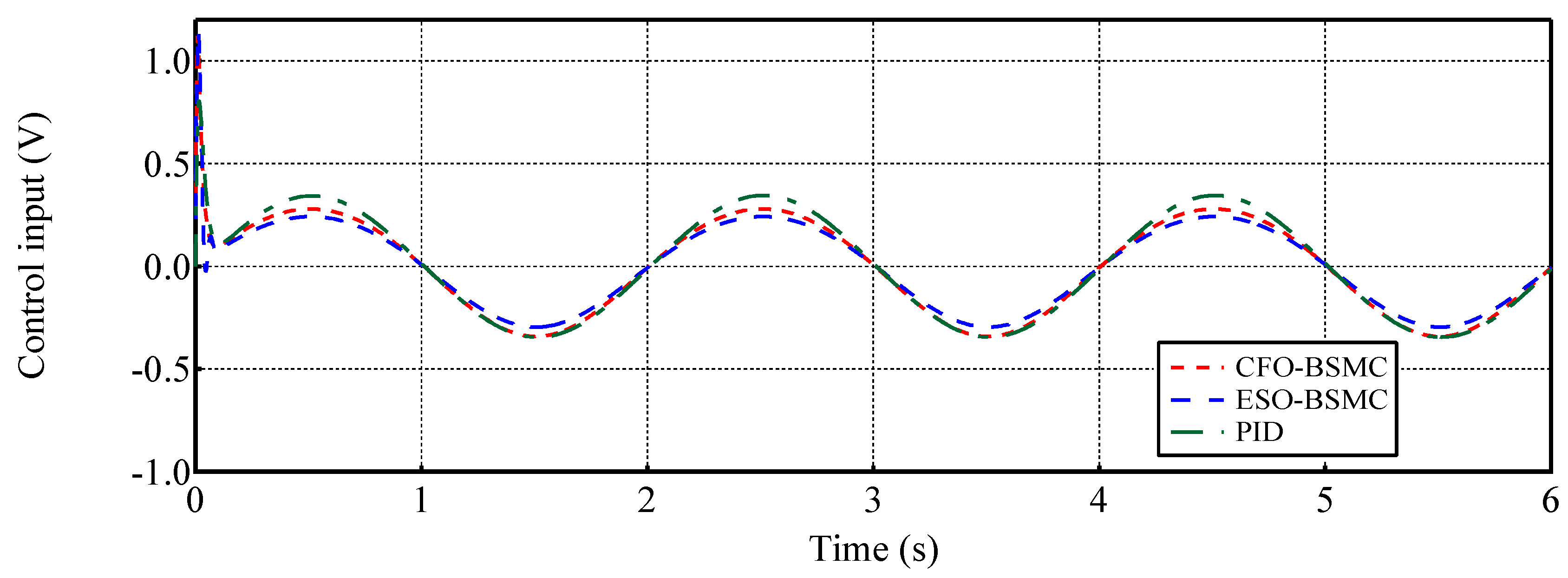
Figure 7.
Comparison tracking performance in Case 2.
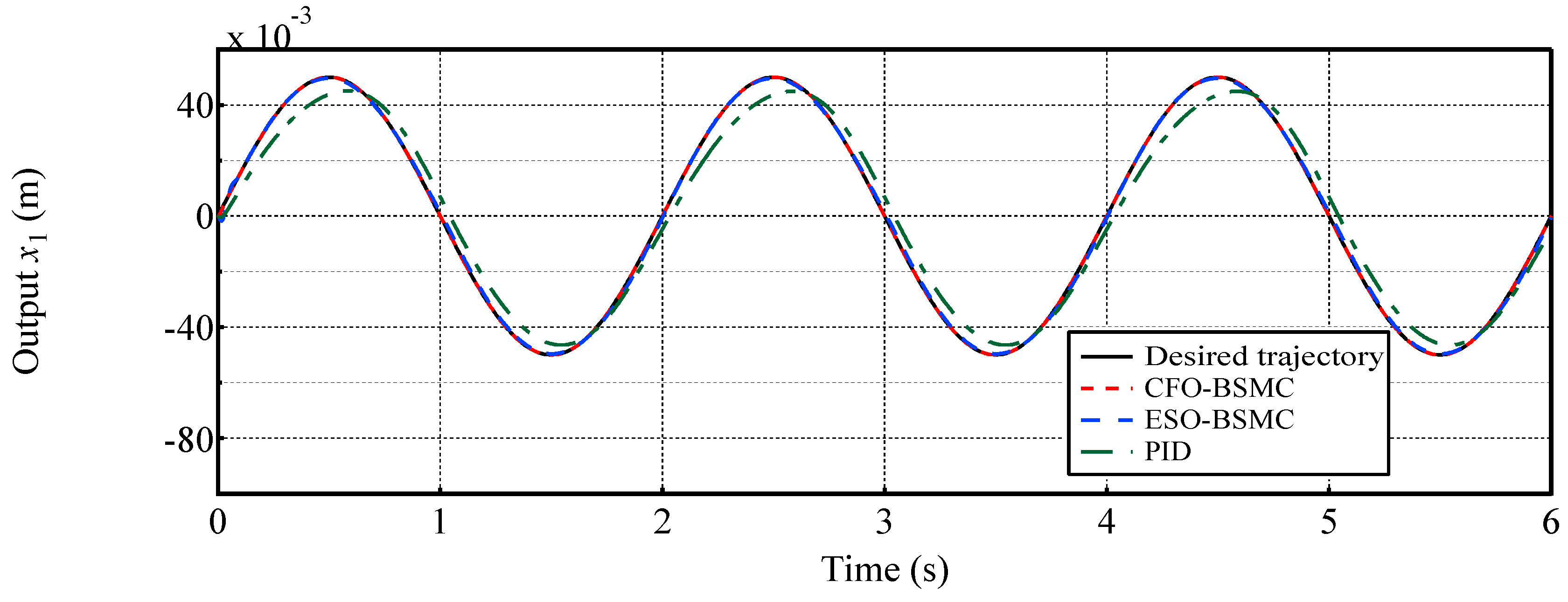
Figure 8.
Comparison tracking errors in Case 2.
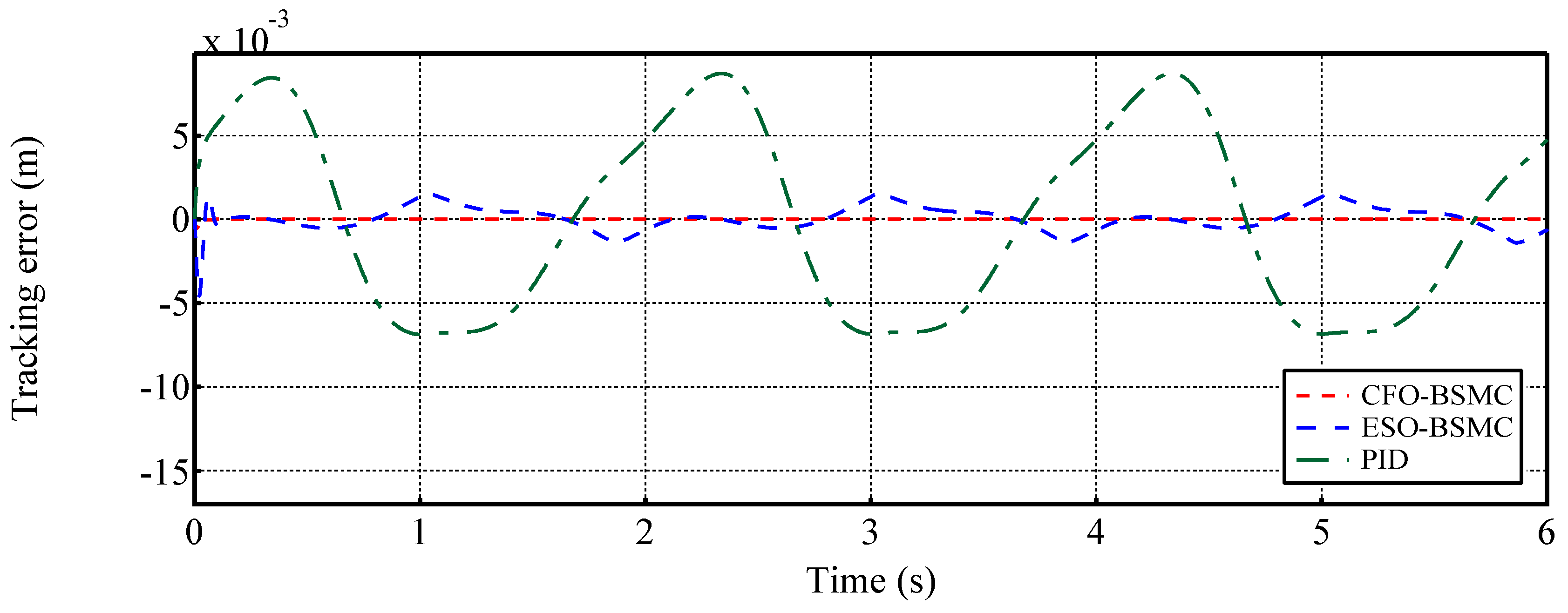
Figure 9.
Comparison estimation performance for the lumped disturbance in Case 2.
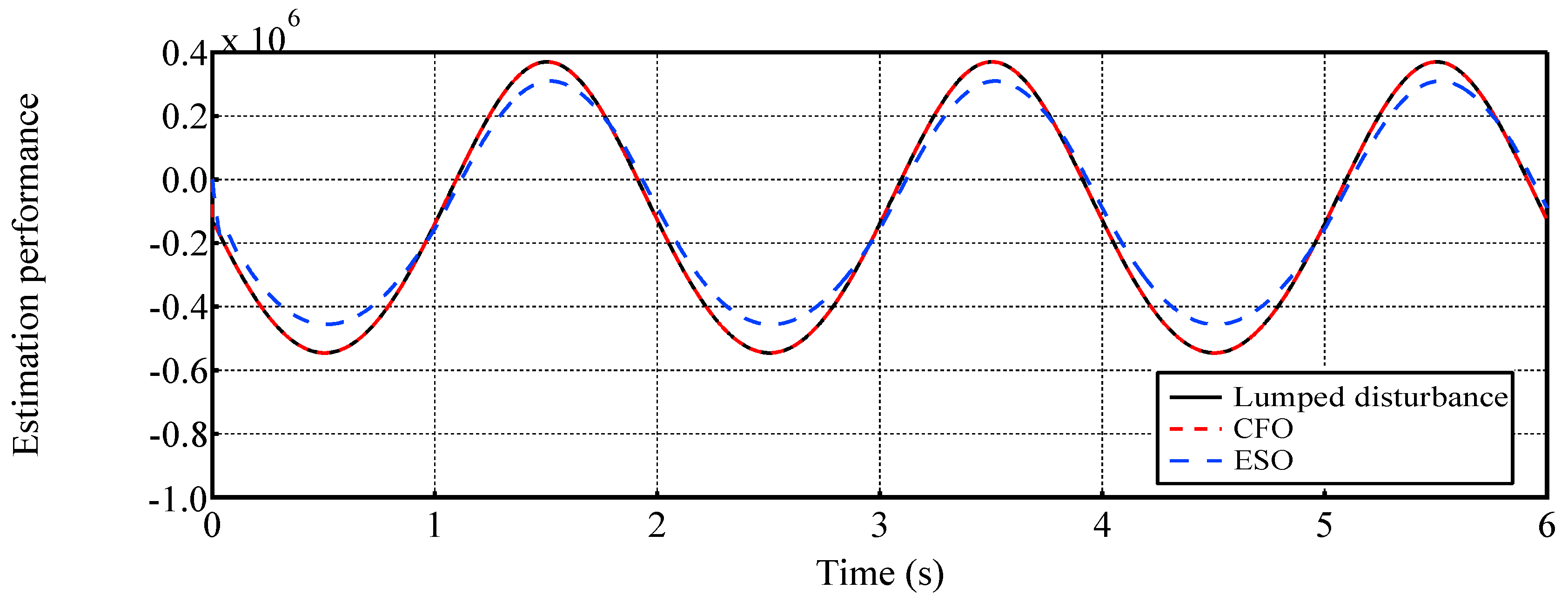
Figure 10.
Comparison control input in Case 2.
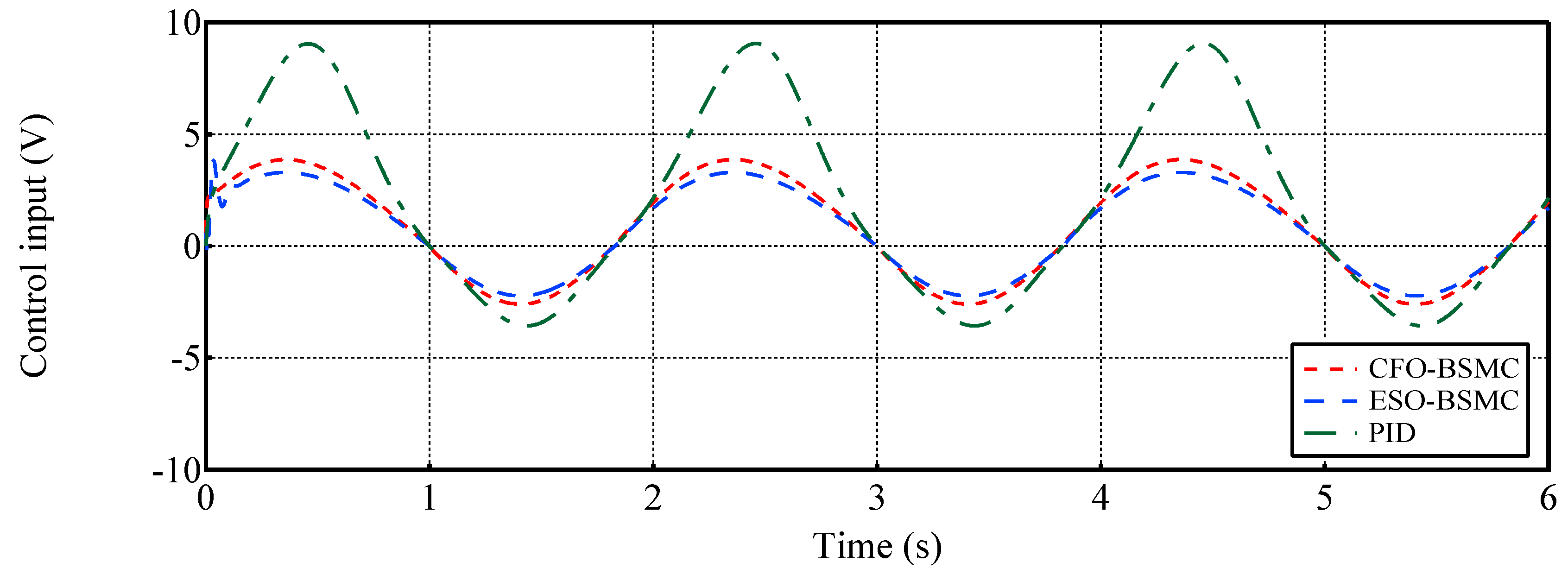

Table 2.
Physical parameters of the electro-hydraulic servo system.
| Parameters | Value | Parameters | Value |
|---|---|---|---|
| 30 | |||
| 10 | |||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



