Submitted:
18 September 2024
Posted:
20 September 2024
You are already at the latest version
Abstract
The paper deals with two new properties of the linear time-optimal control problems with real non-positive eigenvalues of the system. They are the foundation of a new method of synthesizing the time-optimal control without the need to describe the switching hyper-surfaces. The so called “axes initialization” and the synthesis technique are illustrated on the already classical example of the time-optimal control of a double integrator.
Keywords:
Time-optimal control
; Minimum time control
; Pontryagin's maximum principle
; Synthesis of optimal systems
; Linear systems
; switching surface
1. Introduction
In [1] a new property of the linear time-optimal control problem for the case of real non-positive eigenvalues of the system is derived. In Section 4 – Discussion [1] (p. 13) it is said that „Besides the property proved here, there is still a rigorous need to prove other properties of the problem in the case of its expansion.“ The necessary theoretical elements of the new method include the questions about the relationship between the coordinate axes in the state-space of the system of the considered Problem P and its switching hyper-surface, as well as the synthesis of the optimal control based on the solution of the easier Problem P generated by the original Problem P The present work is a direct continuation of the previous work [1] and deals precisely with these necessary theoretical questions. It should be noted that in the period since the publication of the previous work [1], there are no other published studies on the linear time-optimal control problem developing the idea of the proposed method.
Works [2] – [5] consider time-optimal trajectory planning of systems in the presence of limitations or time-varying parameters. They apply Pontryagin's maximum principle with still other optimization techniques. In [2] (p. 506) it is stated that „In control engineering, effective implementations require to take into account the constraints for both the inputs and the outputs of the controlled system.“ Some of the studies [2] – [4] on time-optimal control of linear systems with constraints offer solutions where “the proposed idea is to discretize the continuous-time system and to solve the resulting discrete-time problem by means of linear programming.” ([4], p. 2234) so that “By time discretization and linear programming, an approximation of the generalized bang-bang control can be computed.” [2] (p. 511). In [6] (p. 2) the authors note: „We observe that for many systems, time-optimal trajectories can be represented as a concatenation of multiple trajectory segments. … Take a double integrator as an example. It is well-known that its optimal control policy is bang-bang with at most one switch“. The direction of their research leads to „a polynomial-based quadrotor motion planner that can generate time-optimal trajectories for a wide range of scenarios“ [6] (p. 17). In [4] (p. 2234) it is noted that „in the control engineering literature, it has been emphasized that to achieve high performances in real applications, due attention has to be paid to the constraints which all the plant variables must comply with.“ The development and the maturity reached in the theory of time-optimal control [7] – [15] as well as the contribution of the contemporary researchers [16] – [18], [2] – [6] are a direct confirmation of the long-standing efforts in this field. The research in this field is accompanied and enriched in the years of its development and with theoretical attempts to justify the existence of closed-loop time-optimal control [19], [20]. The difficulties in this topic are reason to note that “… there is still no complete time-optimal analytical solution for systems higher than second order” [18] (p. 1). The approach of the authors of [18] (pp. 1–2) „can be considered in two steps: (1) the time optimal control of multiple integrator with only input saturation; (2) the time optimal control of multiple integrator with input saturation and full state constraints“. For their research „based on Bellman’s principle of optimality, a series of switching surfaces and curves in phase space is generated using dynamic programming method“ (p. 8).
The approach chosen in [1] and developed in the present work with regard to the classical linear time-optimal control problem of a controllable linear system with one input and real non-positive eigenvalues is based on the following main ideas:
Pontryagin's original solution [9] (Chapter 3, § 20, § 21, Example 3) with regard to the synthesizing function
where and are the respective manifolds. The manifold is of dimension ; is entirely in and divides it into two areas and ; consists of all the trajectories under the control ending at a point of , while consists of all the trajectories under the control ending at a point of . The last manifold coincides with the whole state-space of the system;
New geometric properties of the original time-optimal control problem with respect to the system state-space;
Solution of the synthesis problem based on the new properties of the time-optimal control problem and carried out without the need to describe or generate the respective manifolds – the switching hyper-surfaces, but by solving the simpler lower-order problem generated by the original time-optimal control problem.
The current paper is organized in the following way. In Section 2 two new properties of the linear time-optimal control problem are theoretically represented. In Section 3 the author carries out the so called "axes initialization" of the time-optimal control problem of a double integrator as well as the synthesis of the optimal control and obtaining the optimal trajectory. Section 4 presents some concluding remarks on the obtained results.
2. Formulation of the Problem and Solution
Let us consider the linear time-optimal control problem of order , , called Problem P as well as its sub-problem Problem P presented in [1] (pp. 2–4).
We have obtained that in the -dimensional state-space of Problem P the difference between the vector-function (28) of [1] with an initial point representing the initial state (2) or (12) of [1] of Problem P under the optimal control of Problem P and the vector-function with an initial point (20) – (21) of [1] under the optimal control of Problem P represents (31) of [1]:
Let us continue the consideration of the second case of (31) of [1] or the above expression with regard to its last -th coordinate for , i.e. when . In case
and describes sequentially all the values of the interval , then by (31) of [1] all the points of the line passing through the point with coordinates (20) – (21) of [1] parallel to the axis and located above the point by (31) are transformed at the moment successively into the points of the positive part of the axis of the -dimensional state-space of Problem P, whereby all these trajectories are located outside the switching hyper-surface of Problem P having one and the same relation to it, simultaneously above or simultaneously below the switching hyper-surface of Problem P. Thus the positive semi-axis is outside the switching hyper-surface of Problem P, being wholly below or wholly above the switching hyper-surface of Problem P. When
based on the same reasoning we get that the negative semi-axis is outside the switching hyper-surface of Problem P, being wholly below or wholly above the switching hyper-surface of Problem P but in the opposite relation to the switching hyper-surface of Problem P relative to the positive semi-axis Based on this conclusion for the considered class of problems we could define the term for the variable spreading the definition of the term about the variable mentioned in [1] (p. 11) as a term introduced in [14] of [1] (p. 38) and [15] of [1] (pp. 319–320) “which defines the relation of the points of the axis of the state-space of the system of Problem P from the considered class of problems to the switching hyper-surface of the same Problem P.”
Definition. We define as a variable accepting values or , i.e.
so that for the optimal control – the solution of Problem P it must be satisfied:
As it is mentioned in [1] (p. 11) the value of the variable is determined by a procedure called “axes initialization” [14] of [1] (Chapter 3, Section 3.3, pp. 60–88), [16] of [1] (pp. 41–45).
In order to determine , let us now perform the following few constructions.
Construction 1
First, let us first choose random positive finite numbers , , …, , i.e.
Let us form the following piecewise constant function as an admissible function for the considered class of problems in [1] – “the admissible control is a piecewise continuous function that takes its values from the range (3), which is continuous on the boundaries of the set of allowed values (3) and in the points of discontinuity we have (4)”, where its value in the -th interval, , is
Note that the value of in the first interval of constancy is .
Let us denote by the length of the function or the sum of the lengths of all intervals of constancy of
Let the initial state of Problem P be the following point in the -dimensional state-space of Problem P
Let us now consider the trajectory in the -dimensional state-space of Problem P with an initial state (9) under the control (7)
It is easy seen that the control (7) transfers the initial state (9) of the system of Problem P, (7) of [1], at the moment at the origin of the -dimensional state-space of Problem P:
Thus we can draw the following conclusion.
Corollary 1. The piecewise constant function (7) with an amplitude , non-zero intervals of constancy , , …, , and a value in the first interval of constancy transfers the system of Problem P from its initial state (9) at the final moment (8) at the origin of the -dimensional state-space of Problem P The function represents the optimal control of Problem P with an initial state of the system . The point is located outside the switching hyper-surface of Problem P.
Let us denote by the output of the system of Problem P, (7) of [1], with an initial state (9) under the control (7) for
Construction 2
Secondly, let us now consider Problem P with an initial state of the system (1) of [1] in form (10) of [1] at the point with coordinates
where is (9), is (15), is (7), but (18) is the initial state of the -th coordinate of the state-space vector of system (1) or (10) of [1]. Let us consider the trajectory in the -dimensional state-space of Problem P with an initial state at the point with coordinates (17) and (18) under the control (7), which according to the above Corollary 1 represents the optimal control of Problem P with an initial state (9). The vector-function based on the representation of the system (1) in form (10) is described as
For the state at the moment :
bearing in mind (11) – (14) and replacing with the expression for it (18), we obtain consecutively:
Thus, we can draw the following conclusion.
Corollary 2. The trajectory in the -dimensional state-space of the system (1) or (10) of [1] with an initial point (17) and (18) under the control (7) ends at the moment at the origin of the -dimensional state-space of Problem P. Taking into account Corollary 1 that the function is a piecewise constant function with amplitude and exactly intervals of constancy, and represents the optimal control of Problem P, whose purpose built initial state is generated also as initial state of the sub-problem by the initial point (17) of Problem P, then it follows that in accordance with [13] (Chapter 2, §6, Theorem 2.11, p. 116) the trajectory lies wholly on the switching hyper-surface of Problem P. The value of the optimal control for this point is , as is the control in the first interval of constancy of . The point is a point from the manifold according to the exposition in Section 1 “Introduction” of [1] based on Pontryagin's original sources [9] (Chapter 3, § 20, § 21, Example 3), where the solution of the problem of a linear time-optimal control system fulfilling the condition of normality with real non-positive eigenvalues and one control input is described.
Construction 3
Let us employ the matrix representation of the equations (1) of [1] of the original system of Problem P and the relation by the form (1) of [1] with the system (7) – (9) of [1] of order of its sub-problem Problem P, which matrix description is also depicted in Figure 1 of [1].
Let now be an arbitrary positive number, i.e.
and consider the state in the -dimensional state-space of the system of Problem P with coordinates
as well as the trajectory starting at this point under the constant control when
The final point of this trajectory at the moment is the state (17) – (18) in the -dimensional state-space of the system of Problem P.
We get that the points of the trajectory starting at under the control fall into the point , which is a point from the switching hyper-surface of Problem P Having in mind Corollary 2 and following Pontryagin [3] (Chapter 3, § 20, § 21, Example 3), we can draw the following conclusion.
Corollary 3.1 The entire trajectory (32) with an initial point (31) under the constant control with a duration , ending at (17) – (18), but without the endpoint itself is a part of the manifold , which is the part of the state-space of Problem P outside the switching hyper-surface of Problem P with a value of the optimal control for the points of this manifold .
Let us say for convenience that the points of the manifold are above the switching hyper-surface of Problem P while the points of are below the switching hyper-surface of Problem P.
Let us form the following piecewise constant function with intervals of constancy, where the duration of the first interval is and the value of the function there is , while from the second till the -th interval the function represents the shifted to the right by a distance function (7), i.e. the duration of the second interval is while the value there is and so on for the intervals after the second one till the -th one, which is with a length and a value of the function within it . We write the function in the following two ways.
Then the point (31) in the -dimensional state-space of the system of Problem P expressed in (31) by (17) and (18) is also expressed as:
Corollary 3.1 can be amended with the following corollary.
Corollary 3.2 The piecewise constant function , ], (37) or (38) with non-zero intervals of constancy represents the optimal control of Problem P with an initial state (39) or (31).
Construction 4
Let us now consider Problem P with an initial state (39) or (31) and its respective sub-problem Problem P. Let us form the trajectory in the -dimensional state-space of the system of Problem P with an initial state under the optimal control of Problem P:
According to Corollary 3 . Therefore, by Theorem 1 of [1] this trajectory also lies in – lies above the switching hyper-surface of Problem P nowhere intersecting it and ends at the moment at a point of the coordinate axis different from zero.
Considering the relation (12) of [1] between the initial state of Problem P, (2) of [1], and the initial state of Problem P, (11) of [1],
the trajectory (40), according to (29) of [1], represents:
The final point of this trajectory lies on the axis :
Thus, the value, more precisely, the sign of the last -th coordinate
indicates whether the positive or negative part of the axis is a part of the manifold , i.e. is above the switching hyper-surface. We obtain
Thus, if , then the positive part of the axis is a part of the manifold , i.e. is located above the switching hyper-surface, and accordingly the negative part of the axis is below the switching hyper-surface or is a part of the manifold .
When , then the negative part of the axis is a part of the manifold , i.e. is located above the switching hyper-surface, while the positive part of the axis is below the switching hyper-surface or is a part of the manifold .
Thus, the following theorem with regard to the “axes initialization” has been proven.
Theorem 1. If the initial state of Problem P represents the point (39), where , , …, are random finite positive numbers, the function , is a piecewise constant function with non-zero intervals of constancy (38) with an amplitude , and starts with a value on its first interval, then:
• The point and the function , represents the optimal control of Problem P;
• The trajectory (40) in the -dimensional state-space of the system of Problem P with an initial point under the optimal control of Problem P is also located in the manifold – lies above the switching hyper-surface of Problem P nowhere intersecting it and ends at the moment at the point (44) of the coordinate axis different from zero;
• The sign of this -th coordinate (46) indicates whether the positive or the negative part of the axis is a part of the manifold i.e. is above the switching hyper-surface. Thus, if , then the positive part of the axis is a part of the manifold , i.e. is located above the switching hyper-surface, and accordingly the negative part of the axis is below the switching hyper-surface or is a part of the manifold . When , then the negative part of the axis is a part of the manifold , i.e. is located above the switching hyper-surface, while the positive part of the axis is below the switching hyper-surface or is a part of the manifold .
Construction 5
Let us now consider Problem P with an initial state at the point which can now be any point in the -dimensional state-space of the system of Problem P Suppose that we have solved the simpler sub-problem Problem P and obtained of Problem P Let us consider the trajectory in the -dimensional state-space of the system of Problem P with an initial point under the optimal control of Problem P:
Based on the relation (12) of [1] between the initial state of Problem P, (2) of [1], and the initial state of Problem P, (11) of [1],
the trajectory (47) according to (29) of [1] is described as:
The final point of this trajectory lies on the :
According to Theorem 1 of [1] this entire trajectory (47) or (49), i.e. all its points, have the same relation to the switching hyper-surface of Problem P. Let us now consider the possible cases.
Case 1. The trajectory lies entirely on the switching hyper-surface of Problem P and the final point at the moment is the origin of the -dimensional state-space of the system of Problem P. Therefore, the -th coordinate of (51) is also 0:
In this case the optimal control – the solution of the sub-problem Problem P which is a piecewise constant function with at most intervals of constancy, i.e. with at most switchings, is also the solution of Problem P:
Case 2. The trajectory lies wholly above or below the switching hyper-surface of Problem P nowhere intersecting it and the final point at the moment is a point of the coordinate axis different from zero. Therefore, the -th coordinate of (51) satisfies:
Case 2.1 If the sign of the specified above -th coordinate and the sign of the variable (46) are the same, then according to the proved above Theorem 1 the entire trajectory (47) or (49) belongs to the manifold , i.e. all the point of are points of the manifold or are located above the switching hyper-surface of Problem P:
Case 2.2 If the sign of the specified above -th coordinate and the sign of the variable (46) are opposite to each other, then according to the proved above Theorem 1 the entire trajectory (47) or (49) belongs to the manifold , i.e. all the point of are points of the manifold or are located below the switching hyper-surface of Problem P:
Let us define the variable , which is the value of the -th coordinate of the final state (51) of the trajectory (47) or (49), obtained under the optimal control of Problem P at the moment in the -dimensional state-space of the system of Problem P with an initial state :
Thus, the following theorem with regard to the synthesis of the time-optimal control at the initial state of Problem P has been proven.
Theorem 2. If the optimal control of the sub-problem Problem P is found – the solution then the optimal control at the initial state of Problem P can be determined as:
The following consequence of the above Theorem 2 holds.
Consequence 1. In the case that , then the solution of Problem P represents the already found solution of the sub-problem Problem P:
Let us consider the case when . This means that the initial state of the system of Problem P is outside the switching hyper-surface of Problem P, i.e. it is a point of the manifold , or In this case, assume that the optimal control at the initial state of Problem P and the optimal control at the initial state of Problem P are the same, i.e. both have the value or simultaneously:
It follows from the above that the optimal control of Problem P as a piecewise constant function with at most intervals of constancy with an amplitude has at least one interval of constancy. Let us denote its length as . So it is valid:
Let us consider the trajectory (47) or (49) in the -dimensional state-space of the system of Problem P with an initial state obtained under the optimal control of the sub-problem Problem P. According to Theorem 1 of [1] this trajectory (47) or (49) lies entirely in one of the two manifolds or of the state-space of Problem P Let us consider the first section ot this trajectory formed under the constant control with a value and a duration :
Then the first section of the trajectory (47) or (49) for in the -dimensional state-space of the system of Problem P is described as:
Since (60) is fulfilled in this case, then for (63) or the first section of the trajectory (47) or (49) it is valid that:
The possible options for the optimal control at the point can only be or . If , then , and if , then .
We can represent this section (64) of the trajectory (47) or (49) in terms of as:
But (65) describes the part of the optimal trajectory of the system in the manifold of the -dimensional state-space of the system of Problem P with an initial point obtained under the optimal control for the points of this manifold for in the case when while (66) describes the part of the optimal trajectory of the system in the manifold of the -dimensional state-space of the system of Problem P with an initial point obtained under the optimal control for the points of this manifold for in the case when . Thus, we proved the following corollary of Theorem 2.
Consequence 2. In case when and , then the first section of the trajectory in the -dimensional state-space of the system of Problem P with an initial point obtained under the optimal control of the sub-problem Problem P and formed under the constant control with a value and a duration , in addition to being outside – above or below and nowhere intersecting the switching hyper-surface of Problem P, is also a part of the optimal trajectory of Problem P located in the manifold when or located in the manifold when Example
Let us carry out an “axes initialization” for the double integrator from the example of [1] (Section 3. Example, pp. 8–13, 3.2. Synthesis Based on the New Property and the Method [14], pp. 10–13). The equations of the system of the considered Problem P there in [1] are (45) and (46). The equations of the system of the sub-problem Problem P are there (47) и (48).
Equation (57) of [1] (p. 11) simply points out the fact that . We will derive this result based on the theoretical conclusions obtained here.
For , according to Construction 1, we choose an arbitrary finite positive (6), for example
The piecewise constant function (7), in this case with only one interval of constancy with a length (67), represents
The duration of is
We obtain for the initial state (9) of Problem P, here in the one-dimensional state-space of Problem P:
Figure 1 shows the transition from the above initial state of the system of Problem P to the one-dimensional state-space origin under the control (68) with a duration (69), which is an illustration of Corollary 1 of Construction 1. Since the matrix for the example according to (46) of [1] is , the output of the system of Problem P (15) is and coincides with , the state here.
We obtain for the point (17) by Construction 2:
where the coordinate (18), in this case , is
Figure 2 illustrates Corollary 2 of Construction 2. Figure 2а depicts the process of system of Problem P with an initial state at the point (71) under the control (68), (69). The process in the phase plane of the system of Problem P is depicted in Figure 2b, and this phase trajectory is a part of the manifold .
Let us proceed to Construction 3. We now choose , in our case , as an arbitrary finite positive number according to (30). Let, for example,
For the point (31), we obtain
As an illustration of Corollary 3.1 of Construction 3 Figure 3a shows the process of the system of Problem P with an initial point (74) under the constant control for transferring the system at the point (71). The phase trajectory is depicted in Figure 3b. This trajectory without the final point (71) is a part of the manifold , while the final point (71) belongs to the manifold .
Let the piecewise constant function with intervals of constancy be formed according to Construction 3 in the way (38):
Figure 4a shows the process of the system of Problem P with an initial point (74) under the piecewise constant function (75) while in Figure 4b the respective trajectory in the phase plane is depicted. The first section of the trajectory from the point (74) until the state (71), but without the final point itself, is in the manifold , while the second section starting at (71) till the state-space origin is a movement lying in the manifold or on the part of the switching hyper-surface formed under the control . According to Corollary 3.2 of Construction 3, the piecewise constant function , ], (75) with two non-zero intervals of constancy is the time-optimal control of Problem P with an initial state at the point (74).
Let us proceed to Construction 4. We form the sub-problem Problem P of Problem P with an initial state (31), which in this case is the obtained point (74). The equations of the system of Problem P are (48) of [1] (p. 10), and the initial state of Problem P derived from (74) is:
The solution of Problem P is presented by the formulas (49) – (51) of [1] (p. 10). We obtain:
Figure 5a presents the process of the system of Problem P with an initial state at the point (74) under the piecewise constant function with one interval of constancy and a value which is the solution of Problem P. The process in this case corresponds to the process (40) or (42) of Construction 4. The black trajectory in Figure 5b shows the respective trajectory in the phase plane of Problem P, while the blue one outlines the trajectory from the same initial point (74) but obtained under the piecewise constant function , ], (75) and also shown in Figure 4b. The final point of this process, which corresponds to the final point (44) of (40) or (42), is:
That is a point on the axis , in this case different from the state-space origin. The sign of the value of the last coordinate, the second coordinate here, of this point indicates which part of this axis belongs to the manifold . Following (46), we obtain:
Thus, according to Theorem 1 for the negative part of the axis belongs to the manifold i.e. is located above the switching hyper-surface, while the positive part of the axis is below the switching hyper-surface or is a part of the manifold .
Let us now illustrate the synthesis of the time-optimal control and Consequence 2 of Theorem 2. For this purpose, let the initial state of Problem P be:
The sub-problem Problem P in this case is with an initial state
We use the already known solution (77) of Problem P with this initial state (81) or (76). For the variable (57), in our case , employing (52) – (55) of [1] (p. 10), and based on (55) of [1], we obtain
For the optimal control in the initial state of Problem P according to Theorem 2 by (58), taking into account (79), we obtain:
It follows from the above result and the solution (77) of Problem P that:
Thus, according to Consequence 2 of Theorem 2 the first section of the trajectory in the phase plane of Problem P with an initial state (80) obtained under the optimal control (77) of Problem P, in addition to being outside, above or below, nowhere intersecting the switching curve – the manifold of Problem P, is also a part of the optimal trajectory of Problem P located in the manifold This relation is also shown in Figure 6b, where the black trajectory concerns the phase trajectory under the optimal control (77) of Problem P, the manifold is marked with blue, the manifold is marked with red, and the switching curve is . The process of the system of Problem P with an initial state formed under the control (77) is depicted in Figure 6a.
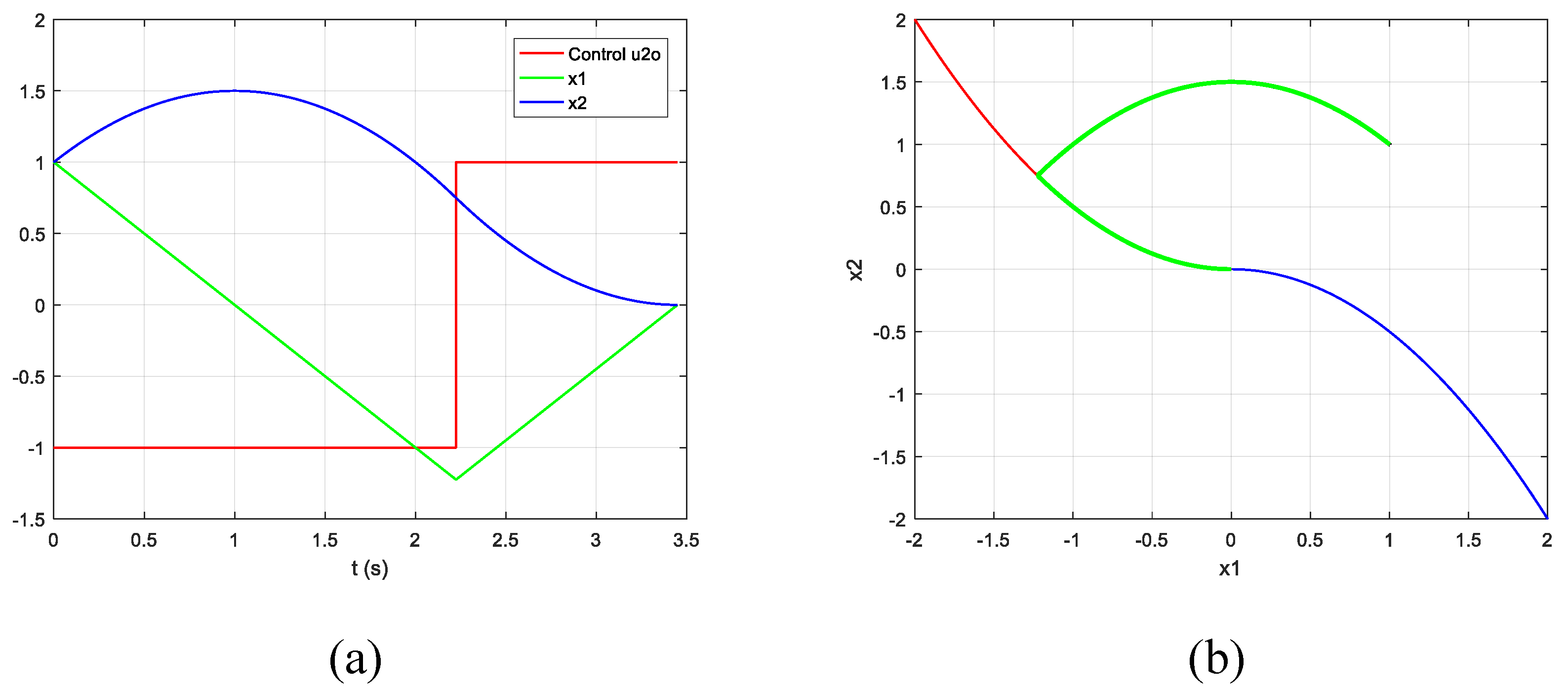
Figure 7a shows the near time-optimal process of Problem P with an accuracy . The green trajectory in Figure 7b outlines the corresponding trajectory in the phase plane of Problem P. It covers the black phase trajectory obtained under the optimal control (77) of the sub-problem Problem P, which is also shown in the previous Figure 6b. The manifold presented in blue, and the manifold presented in red, are also shown in this Figure 7b. The switching curve is .
3. Conclusions
The solution of the time-optimal control problem based on the considered method when the order of the system is higher than two includes generating from the original Problem P the sub-problems Problem P, …, Problem P, Problem P. Every single problem of the set “Problem P … Problem P” requires an „axes initialization“, in order to determine the respective value of for the considered Problem P and obtaining the set , , …, . A feature here is to obtain this set starting from and by successive ascent reaching the original highest order .
Obtaining by Theorem 2 the optimal control for a given initial state is based on the solution of the corresponding sub-problem. Corollaries 1 and 2 are the theoretical basis for an accelerated solution of all sub-problems of the original Problem P by jumping in certain cases along the optimal trajectories of these sub-problems without the need for internal movement along them. This further reduces the computational load which has already been reduced based on the preliminary knowledge of the corresponding state spaces of Problem P to Problem P through the axes initialization and the subsequent synthesis based on the solution of the generated lower order lighter sub-problem relative to the original one.
References [14,15,16,17] of [1] develop a synthesis method for the case of simple non-positive eigenvalues of the system. The new geometric state-space properties obtained here for the classical single-input linear time-optimal control problem with non-positive eigenvalues of the system expand the underlying ideas and fully cover the case of the theorem about the number of switchings or the number of intervals of constancy [9] (Chapter 3, §17, Theorem 10), [13] (Chapter 2, §6, Theorem 2.11, p. 116), [11].
Funding
The research presented in [1] was partially funded by the project BG05M2OP001-1.002-0023-С01 - Competence center "Intelligent mechatronic, eco- and energy-saving systems and technologies". At the time of submission of this research, the above project has ended and there is no funding for it, but the university is in the process of applying for its continuation.
Conflict of Interest
The authors declare that they have no conflicts of interest.
References
- Penev, B. One New Property of a Class of Linear Time-Optimal Control Problems. Mathematics 2023, 11, 3486. [Google Scholar] [CrossRef]
- Consolini, L.; Laurini, M.; Piazzi, A. Generalized Bang-Bang Control for Multivariable Feedforward Regulation. 2024 32nd Mediterranean Conference on Control and Automation (MED), 2024; 506–511. [Google Scholar] [CrossRef]
- Consolini, L.; Piazzi, A. Generalized bang-bang control for feedforward constrained regulation. Proceedings of the 45th IEEE Conference on Decision and Control, San Diego, CA, USA, 2006, pp. 893–898. [CrossRef]
- Consolini, L.; Piazzi, A. Generalized bang-bang control for feedforward constrained regulation. Automatica 2009, 45, 2234–2243. [Google Scholar] [CrossRef]
- V. Rustagi, V. V. Rustagi, V. Reddy, A. Boker, C. Sultan and H. Eldardiry. Efficient Near-Optimal Control of Large-Size Second-Order Linear Time-Varying Systems. IEEE Control Systems Letters, vol. 7, pp. 3878–3883, 2023. [CrossRef]
- Chao Qin, Jingxiang Chen, Yifan Lin, Abhishek Goudar, Angela P. Schoellig and Hugh H.-T. Liu. Time-Optimal Planning for Long-Range Quadrotor Flights: An Automatic Optimal Synthesis Approach. Journal of Latex Class Files, Vol. 14, No. 8, August 2021. [CrossRef]
- Feldbaum, A.A. “The simplest relay automatic control systems”, Automation and Remote Control, Vol. X, № 5, 1949 (in Russian).
- Feldbaum, A.A. “Optimal processes in automatic control systems”, Automation and Remote Control, Vol. XIV, № 6, 1953 (in Russian).
- Pontryagin, L.S.; Boltyanskii, V.G.; Gamkrelidze, R.V.; Mischenko, E.F. The Mathematical Theory of Optimal Processes, Pergamon Press, Oxford, 1964.
- Athans, M.; & Falb, P.L. (1966). Optimal control. An introduction to the theory and its applications. McGraw-Hill.
- Lee, E.B.; Markus, L. Foundations of optimal control theory, Wiley & Sons Inc.: Hoboken, NJ, USA, 1967.
- Bryson, A.E.; & Ho, Y.C. Applied optimal control, Blaisdell Publishing Company, 1969.
- Бoлтянский, В. Г. , Математические метoды oптимальнoгo управления, Наука: Moscow, Russia, 1969. Наука: Moscow, Russia, 1969. (In Russian) [Google Scholar]
- Leitmann, G. ; The calculus of variations and optimal control, Plenum Press, 1981.
- Pinch, E.R. Optimal Control and the Calculus of Variations, Oxford University Press, Oxford, 1993.
- Locatelli, A. Optimal control of a double integrator, Cham, Switzerland: Springer, 2017, Studies in Systems, Decision and Control, Volume 68, Online ISBN 978-3-319-42126-1. [CrossRef]
- Romano, M.; Curti, F. “Time-optimal control of linear time invariant systems between two arbitrary states”, Automatica, Volume 120, 2020, 109151, ISSN 0005-1098. 2020. [Google Scholar] [CrossRef]
- Suqin He, Chuxiong Hu, Yu Zhu, Masayoshi Tomizuka, “Time optimal control of triple integrator with input saturation and full state constraints”, Automatica, Volume 122, 2020, 109240, ISSN 0005-1098. [CrossRef]
- Brunovský, P. (1974). The Closed-Loop Time-Optimal Control. I: Optimality. SIAM Journal on Control, 12(4), 624–634. [CrossRef]
- Sussmann, H.J. (1987). Regular Synthesis for Time-Optimal Control of Single-Input Real Analytic Systems in the Plane. SIAM Journal on Control and Optimization, 25(5), 1145–1162. [CrossRef]
Figure 1.
The purpose built function (67) – (69) and the resulting time-optimal process of the system of Problem P(1): (a) the control ; (b) the state and the output of the system of Problem P(1).
Figure 1.
The purpose built function (67) – (69) and the resulting time-optimal process of the system of Problem P(1): (a) the control ; (b) the state and the output of the system of Problem P(1).
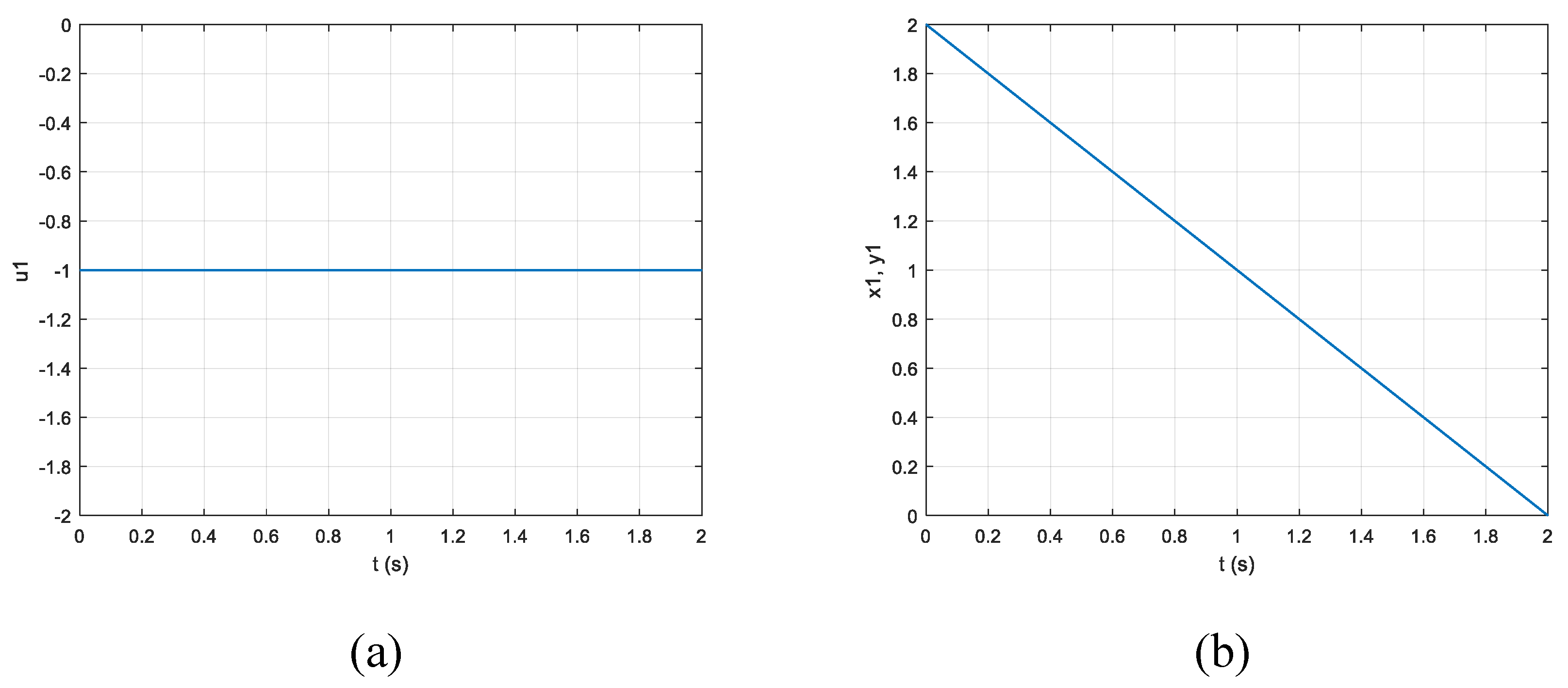
Figure 2.
The movement in the manifold of Problem P from the obtained initial state (71), for which the control (67) – (69) is the time-optimal one: (a) the process and the control ; (b) the phase trajectory in .
Figure 2.
The movement in the manifold of Problem P from the obtained initial state (71), for which the control (67) – (69) is the time-optimal one: (a) the process and the control ; (b) the phase trajectory in .
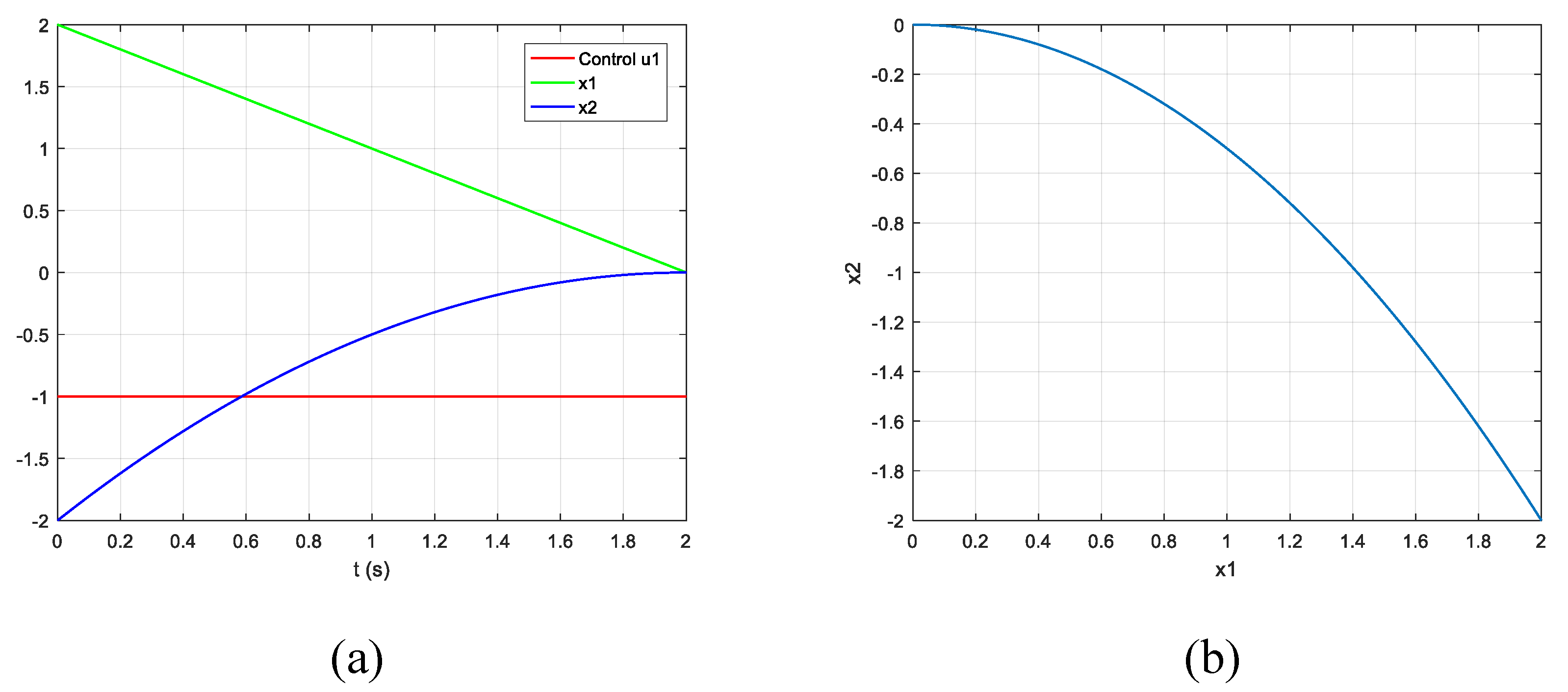
Figure 3.
The trajectory of the system of Problem P with a duration s from the initial state (74) in the manifold untill entering the manifold at the state (71): (a) the process itself; (b) the phase trajectory in .
Figure 3.
The trajectory of the system of Problem P with a duration s from the initial state (74) in the manifold untill entering the manifold at the state (71): (a) the process itself; (b) the phase trajectory in .
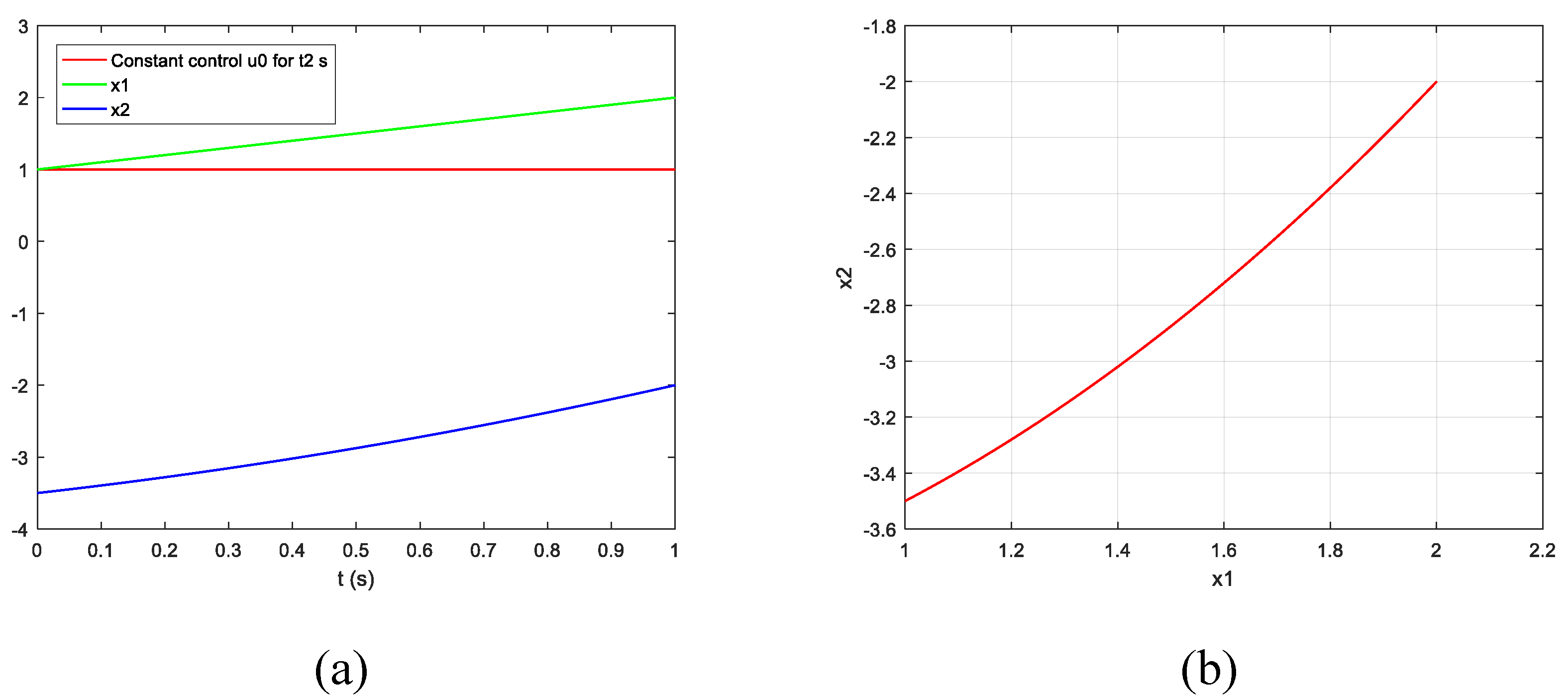
Figure 4.
The optimal process of the system of Problem P with the derived initial state (74) for which the time-optimal control is the specially constructed function (67), (73), (75): (a) the process; (b) the trajectory in the phase plane .
Figure 4.
The optimal process of the system of Problem P with the derived initial state (74) for which the time-optimal control is the specially constructed function (67), (73), (75): (a) the process; (b) the trajectory in the phase plane .
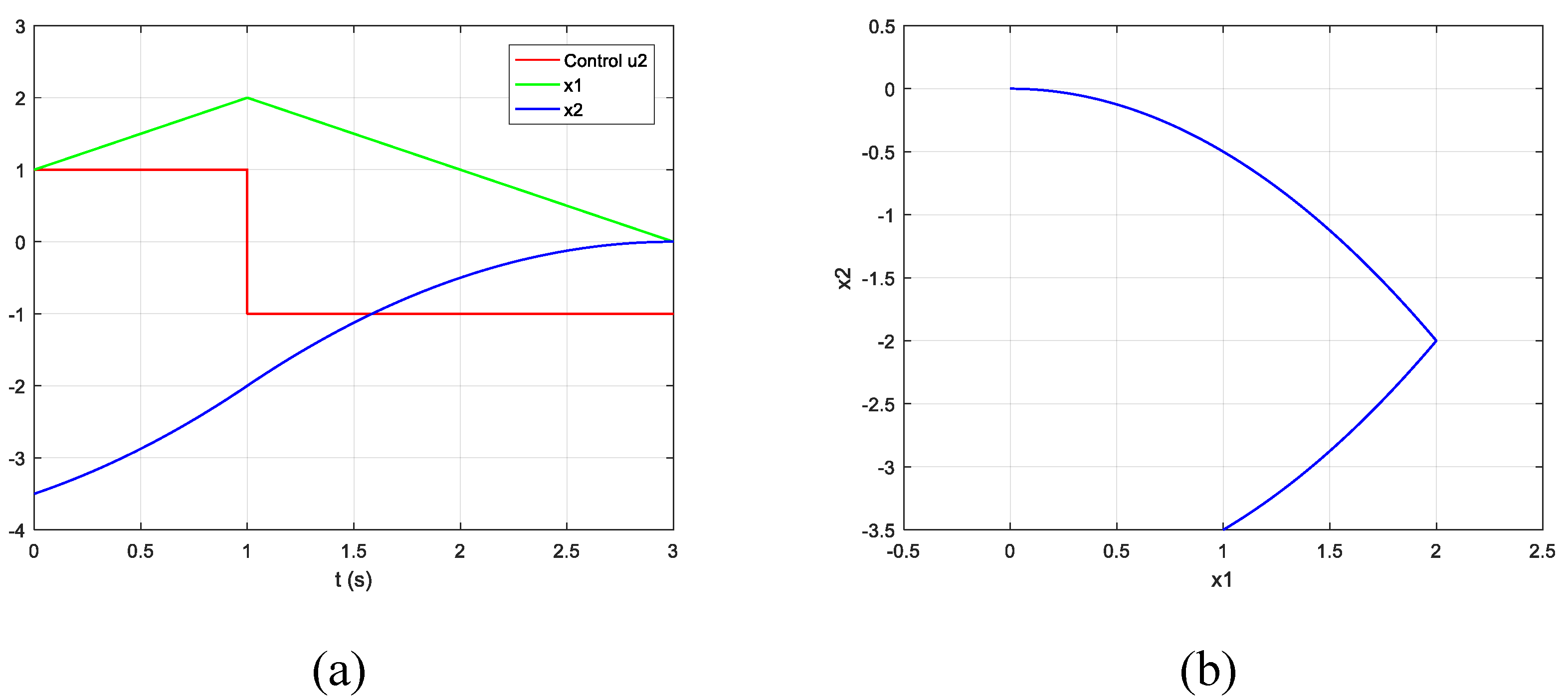
Figure 5.
Trajectories of the system of Problem P with an initial state (74): (a) the process under the optimal control of the sub-problem Problem P; (b) marked with black the phase trajectory corresponding to the process in (a), and the optimal phase trajectory for the point marked with blue.
Figure 5.
Trajectories of the system of Problem P with an initial state (74): (a) the process under the optimal control of the sub-problem Problem P; (b) marked with black the phase trajectory corresponding to the process in (a), and the optimal phase trajectory for the point marked with blue.
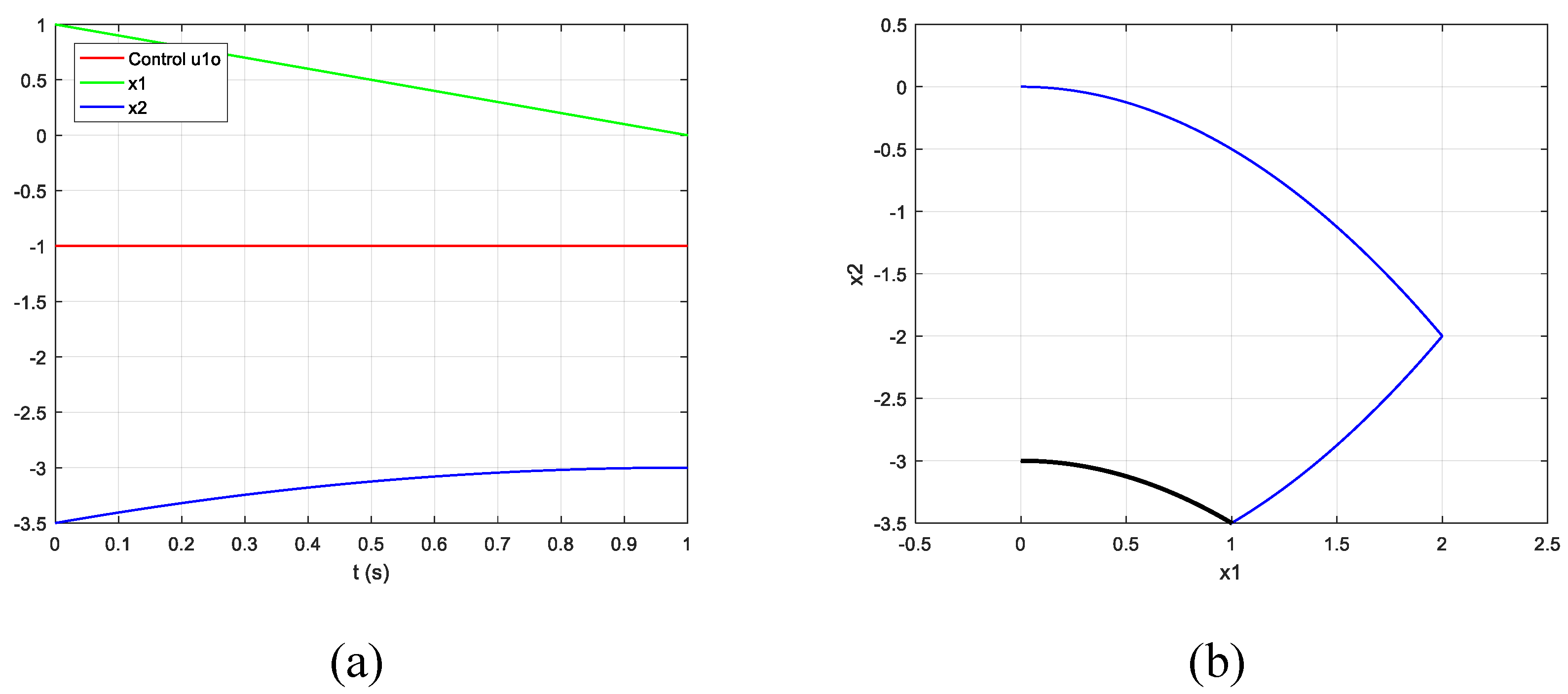
Figure 6.
The trajectory of the system of Problem P with an initial point obtained under the control (77): (a) the process itself; (b) the trajectory in the phase plane of Problem P.
Figure 6.
The trajectory of the system of Problem P with an initial point obtained under the control (77): (a) the process itself; (b) the trajectory in the phase plane of Problem P.
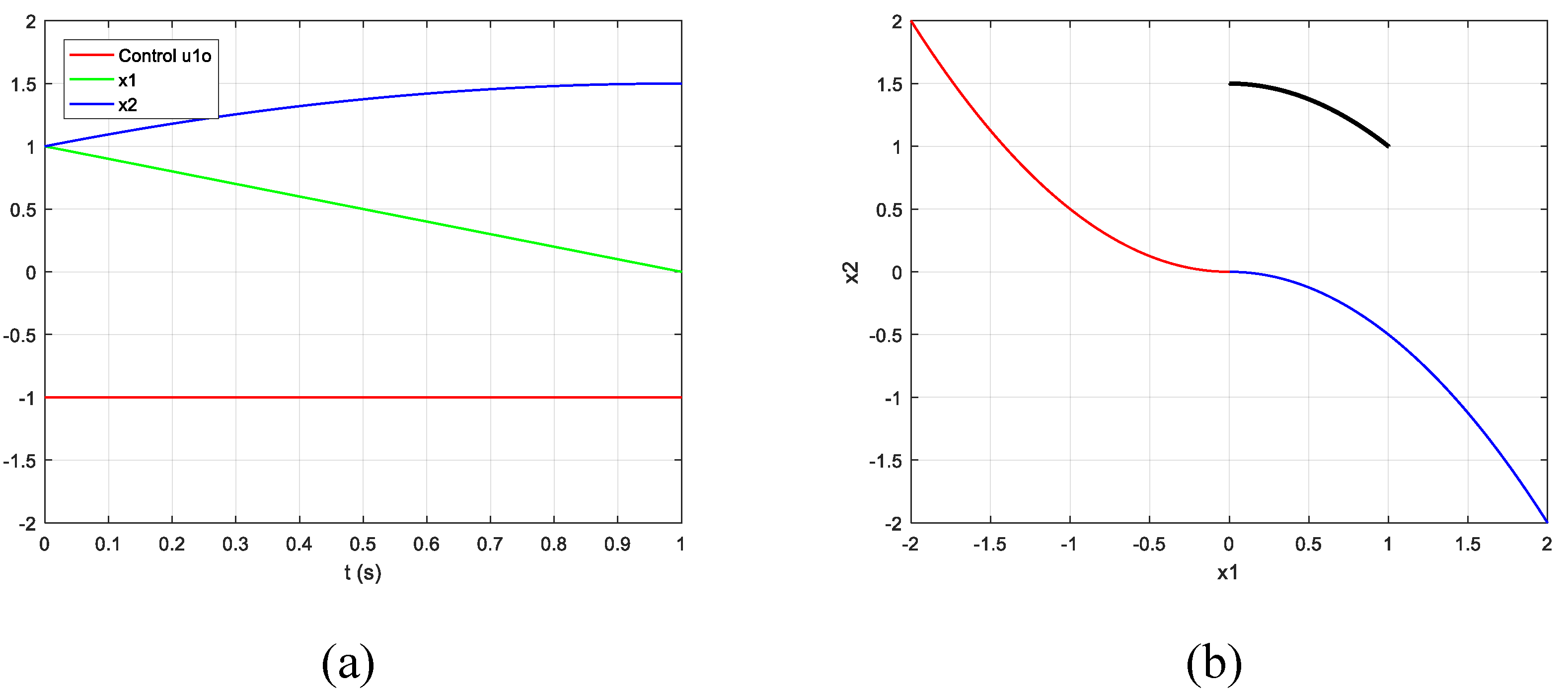
Figure 7.
The near time-optimal trajectory of the system of Problem P referring to the initial state with an accuracy of : (a) the near time-optimal process; (b) the trajectory marked with green in the phase plane of Problem P alongside with the manifold marked with red and blue.
Figure 7.
The near time-optimal trajectory of the system of Problem P referring to the initial state with an accuracy of : (a) the near time-optimal process; (b) the trajectory marked with green in the phase plane of Problem P alongside with the manifold marked with red and blue.
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



