
Submitted:
14 October 2024
Posted:
14 October 2024
You are already at the latest version
Abstract
Liquid crystal torons, localized topological structures, are known for their stability and dynamic behaviour in response to external stimuli, making them attractive for advanced material applications. In this study, we investigate the flow of torons in chiral nematic liquid crystals around obstacles. We simulate the fluid flow and director field interactions using a hybrid numerical method combining lattice Boltzmann and finite difference techniques. Our results reveal that the toron dynamical behaviour depends strongly on the impact parameter from the obstacle. At impact parameters smaller than half cholesteric pitch, the flowing toron is destabilized by the interaction with the obstacle; otherwise, the flowing toron follows a trajectory with a deflection which decays exponentially with the impact parameter. Additionally, we explore the scattering of torons by multiple obstacles, providing insights into how the dynamics of these structures respond to complex environments.
Keywords:
complex fluids
; liquid crystals
; lattice Boltzmann
; hydrodynamics
1. Introduction
Liquid crystals (LCs) represent a fascinating class of soft materials characterized by their fluidity combined with anisotropic properties, making them highly responsive to external fields and boundary conditions. This unique combination has led to widespread applications, particularly in display technologies, and has also spurred interest in fundamental research on the stability of their phases and topological structures [1]. Among these structures, solitons in chiral nematic LCs have emerged as a significant area of study due to their rich topological properties and potential for novel technological applications [2,3]. Besides skyrmions, which are two-dimensional configurations, many other topological-protected structures were realized in experiments, including torons, hopfions, skyrmions and solitonic macromolecules. We will refer to torons as the three-dimensional elementary skyrmion terminating at two-point defects to satisfy the uniform surface boundary conditions and match the topologically nontrivial skyrmion tube with the uniform far-field background and reserve skyrmion to describe the two-dimensional midplane structure.
Solitons in liquid crystals are localized, non-singular distortions of the director field that exhibit robust particle-like behaviour and complex interactions. These structures are of particular interest due to their ability to be manipulated by external stimuli, such as electric fields, which can drive their motion and induce collective behaviour [4,5]. The study of soliton dynamics in LCs has provided insights into fundamental aspects of topology in soft matter and has highlighted their potential in advanced material applications, including reconfigurable optical devices and microfluidic systems [4,6,7,8,9,10,11,12,13,13].
While much of the research on LC torons has focused on their behaviour under uniform external fields, little is known under non-uniform conditions such as static colloids or other obstacles trapped in the LC matrix. Furthermore, only a handful of studies addressed the interaction between torons and mass flows [14,15,16,17] remaining an overlooked problem of relevance in various fields. Understanding the dynamical response of LC torons in non-uniform or heterogeneous media is relevant for practical applications, where flowing torons may encounter various types of obstacles, such as geometrically patterned substrates, dispersed colloidal particles or defects in the LC matrix. This response will significantly alter the torons’s initial trajectory, in addition to its shape and stability, potentially driving novel dynamical phenomena.
In the theoretical study of torons, three approaches are commonly used in the literature. The first approach involves the numerical solution of continuum equations resulting from the minimization of the elastic free energy, which is typically implemented using finite difference or finite volume methods [4,18,19,20]. This approach has focused either on the dynamic evolution of torons or on the stable configuration of static torons. The second approach is based on analytical studies of the continuum equations, under simplified conditions required to make the problems tractable [21,22]. This method often provides valuable insights into the toron behaviour in idealized situations. The third approach, a more recent development, uses particle-based modelling, where torons are treated as individual particles [23]. Langevin dynamics is employed to simulate their motion, and potential functions for the toron interactions are inferred from experimental data or from simulations using the first method. In this study, we use the first approach combining it with the lattice Boltzmann method to simulate material flow, providing a comprehensive and versatile framework to study the interaction between topology and external mass flows that may be perturbed by an arbitrary array of obstacles.
In what follows, we study the flow of liquid crystal torons, driven by an external mass flow, around solid obstacles. The toron’s stability and trajectory are found to depend strongly on the impact parameter of the obstacle. When the impact parameter is less than m, the toron becomes unstable and disintegrates, in flows where torons would remain stable otherwise. However, when the impact parameter, is larger than m, the stability of the toron is preserved while the toron’s trajectory is deflected by an amount that decays exponentially with the impact parameter. Notably, the toron’s velocity is found to increase as it approaches the obstacles due to flow constriction. We have also examined the dynamics and stability of torons flowing around one and between two obstacles, providing additional insights into how multiple obstacles may influence the dynamics of flowing torons.
2. Method
2.1. Hydrodinamic Equations
The dynamics of the liquid crystal (LC) director field are described by the Ericksen-Leslie model [24,25,26]. This model couples two dynamical equations: one for the material flow and another for the director field. These equations are particularly adequate to describe the behaviour of LCs in the nematic or cholesteric phases.
For the velocity field, we use the Navier-Stokes equation along with the continuity equation:
where the viscous stress tensor is defined as:
In these equations, denotes the fluid density, g is the external acceleration that drives the fluid flow, p is the pressure, is the fluid velocity, is the director field describing the direction of alignment of the LC molecules, and ’s are the Leslie viscosities. The kinematic transport, which describes the influence of the macroscopic flow field on the microscopic structure, is given by:
while the shear rate and vorticity tensors are defined as:
The elastic stress tensor is:
where E represents the Frank-Oseen elastic free energy:
with , , the Frank elastic constants, and , with P the cholesteric pitch.
The second set of equations describes the evolution of the director field:
where is the rotational viscosity determining the relaxation rate of the director, and is the torsion coefficient characterizing the contribution to the viscous torque from the velocity field gradients. The ratio is known as the alignment parameter, with indicating flow-aligning and flow-tumbling systems. The molecular field is given by
The simulations employed a hybrid numerical method. The velocity field is resolved using the lattice Boltzmann method [27,28], summarized in the next subsection, with the elastic and viscous stress tensors (except the term proportional to ) introduced as force terms. The director field equation, Eq.(9), was solved using a predictor-corrector finite-difference algorithm. On solid boundaries, including the obstacles, infinite homeotropic anchoring and no-slip conditions were applied using the bounce-back condition [27].
The simulations started with the liquid at rest, and the directors mostly aligned perpendicular to the plates except near the toron, whose configuration was obtained by minimizing its free energy starting from the Ansatz of Ref. [14]. The material parameters were chosen to be close to those of MBBA at 22∘C [29], except for the absolute viscosity (or equivalently, ), which was doubled to ensure reasonable simulation times. The code was parallelized in CUDA-C, and the simulations were executed on GPUs [30]. A typical performance of the simulation is ∼328 MLUPS (Mega Lattice Updates Per Seconds) in a Nvidia Tesla V100 using double precision calculations.
2.2. Lattice Boltzmann Method
We obtain the velocity field by solving the discretized Lattice Boltzmann Equation (LBE) using the single relaxation time (SRT) collision approximation and Guo’s forcing scheme [31] as follows:
where is the particle distribution function, is the equilibrium distribution function, which is determined by:
where is the lattice speed of sound, defined as . , , and the reference density is set to unity (lattice units). and are the lattice weights and the discrete velocity vector in the direction, respectively. In this work, we use the lattice arrangement, hence and are given by:
The macroscopic fluid density is defined as:
The relaxation time () is related to the kinematic viscosity of the fluid () through:
The forcing term in the LBE equation is defined as:
where represents the resultant force acting on the flow field (external force and stresses arising from the liquid crystal distortions), and is the macroscopic fluid velocity, which is defined as:
The bounce-back boundary condition is used to model the no-slip boundary condition over the solid nodes [27]. The idea behind the bounce-back boundary condition is to reflect the distribution functions hitting a solid node with the same magnitude in the reverse direction. The exact location of the solid boundary is assumed to be between two lattice points [27].
3. Results
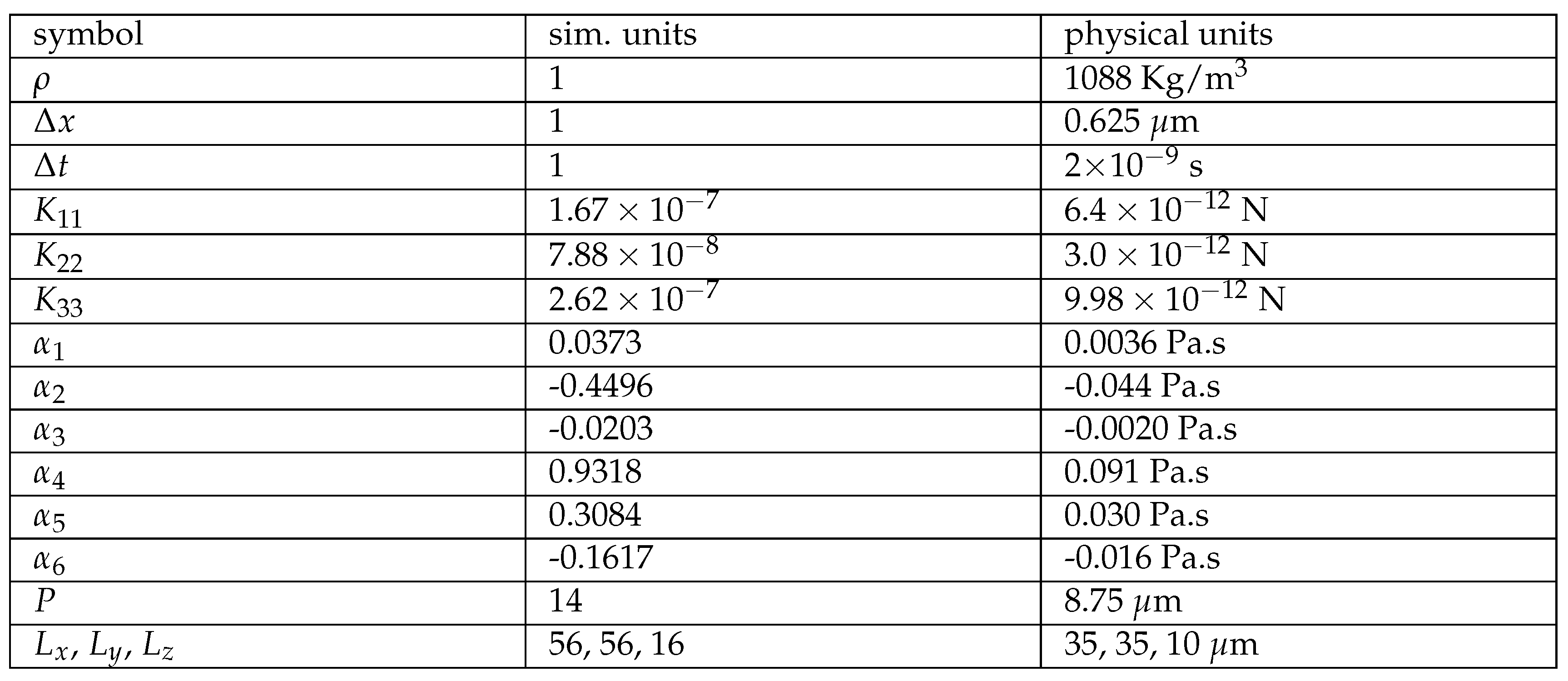
We report the results of numerical simulations of a flowing toron driven by an external force, around a cylindrical pillar near its initial trajectory. The liquid crystal was initialized at rest, with alignment along the vertical direction, except at the toron, where we used the relaxed configuration obtained from the ansatz [14]. The system dimensions were set to , and the material parameters are listed in Table 1. The pillar, with a radius of m (or 5 ), homeotropic anchoring and no-slip boundary was placed at and . The fluid was driven by an external body force of magnitude m/s2 (or l.u.) in the x direction.
As expected, the pillar distorts the velocity field and perturbs the toron initial trajectory, as shown in Figure 1. In the midplane, Figure 1(a), the toron shrinks slightly as it flows around the pillar but later recovers its original configuration. To confirm the toron’s stability post-pillar interaction, we relaxed the final configuration in Figure 1 without the external force, confirming that it remains stable (not shown). The toron cross-section in Figure 1(b) reveals that the toron becomes asymmetric in the direction of the flow, consistent with previous observations in Poiseuille-like flows without the pillar [16]. The velocity field is perturbed by the toron, while the pillar introduces large velocity gradients in the flow field (Figure 1(c)). In the cross-sectional view, Figure 1(d), the flow exhibits a Poiseuille-like profile, except near the toron and the pillar.
The deflection of the initial trajectory of the toron depends on the impact parameter h, as shown in Figure 2. Trajectories are defected significantly when the impact parameter is less than cholesteric pitch. However, below a threshold, m, or P, in our simulations, the toron becomes unstable and disintegrates. The toron in Poiseuille flows already becomes unstable without the obstacle at higher speeds [17] and here it occurs due to the local increase in the velocity field around the obstacle. When the toron collides directly with the pillar (), it disintegrates before flowing around the obstacle. For small but non-zero values of h, the toron flows around the pillar but later becomes unstable, as depicted in Figure 3. The inset on the left of Figure 2 depicts the deflection of the toron initial trajectory as a function of the impact parameter, h. As h increases, decays exponentially, reaching zero when the obstacle is sufficiently far from the toron so that the toron does not feel the change in the director field caused by the obstacle. The exponential decay is usually observed in the distortions in the liquid crystal orientation [32]. The inset on the right shows the toron velocity as a function of position, where we note that a stable toron accelerates near the pillar, with its velocity increasing by about before returning to its initial value, due to flow constriction by the pillar.
The free energy integrated over the entire volume, calculated using Eq.(7), is plotted in Figure 4 as a function of time for various impact parameters, h. At small h, the free energy rises sharply, reaching a peak when the toron loses stability and disintegrates. At larger impact parameters, h, the toron remains stable, and the free energy stabilizes, with slight perturbations occurring as the toron flows around the pillar, particularly evident in the orange curve (m) around s.
Until now, we considered the flow of a toron around a single pillar. To explore the effects of multiple obstacles, we simulated the toron flow between two pillars, which act as a flow constriction (see Figure 5). In this configuration, the toron accelerates by 44% as it flows between the pillars, as shown in Figure 5(c). Similar to the single-pillar case, the toron becomes unstable at small values of h. In our simulations, the toron remains stable for m, which is almost twice the impact parameter required for toron stability in the single-pillar case. This is likely due to the toron’s size reduction when passing around the pillars, an effect that is amplified by the presence of two obstacles. Additionally, in this configuration, the toron does not deviate from its initial trajectory.
In addition to simulating the interaction between the toron and a cylindrical pillar with homeotropic anchoring, we investigated other obstacle geometries (not shown). For example, we replaced the pillar with a solid sphere, mimicking a colloid, and applied different anchoring conditions (both homeotropic and toron-like). However, no qualitative differences were observed. Thus, we conclude that the primary factor determining the flow of torons around obstacles, as well as their stability, appears to be the effect of the large velocity gradients introduced by the obstacles rather than their detailed form.
4. Conclusion
In this study, we investigated the interaction between flowing liquid crystal torons and solid obstacles. Through numerical simulations using a combination of the lattice Boltzmann method and finite differences, we demonstrated how the dynamics of flowing torons respond to the presence of obstacles in the flow domain. Our findings reveal that the toron’s stability and trajectory depend strongly on the impact parameter of the obstacle. At short impact parameters (smaller than half cholesteric pitch), the toron becomes unstable and disintegrates, while at larger impact parameters, the toron’s trajectory is deflected around the obstacle. The deflection of the trajectory and the velocity increase as the toron approaches the obstacle depend strongly on the impact parameter. In addition, we explored the dynamics of torons flowing between two obstacles, providing insights into how multiple obstructions influence the toron´s stability and motion. This study contributes to our understanding of toron interactions in complex environments which could be used in applications in reconfigurable optical devices and microfluidic systems.
Acknowledgments
We acknowledge financial support from the Portuguese Foundation for Science and Technology (FCT) under the contracts: PTDC/FISMAC/5689/2020 (DOI 10.54499/PTDC/FIS-MAC/5689/2020), UIDB/00618/2020 (DOI 10.54499/UIDB/00618/2020), UIDP/00618/2020 (DOI 10.54499/UIDP/00618/2020), DL 57/2016/CP1479/CT0057 (DOI 10.54499/DL57/2016/CP1479/CT0057) and 2023.10412.CPCA.A2.
References
- Chen, H.W.; Lee, J.H.; Lin, B.Y.; Chen, S.; Wu, S.T. Liquid crystal display and organic light-emitting diode display: present status and future perspectives. Light Sci. Appl. 2018, 7, 17168–17168. [Google Scholar] [CrossRef] [PubMed]
- Smalyukh, I.I.; Lansac, Y.; Clark, N.A.; Trivedi, R.P. Three-dimensional structure and multistable optical switching of triple-twisted particle-like excitations in anisotropic fluids. Nat. Mater. 2010, 9, 139–145. [Google Scholar] [CrossRef]
- Ackerman, P.J.; Trivedi, R.P.; Senyuk, B.; van de Lagemaat, J.; Smalyukh, I.I. Two-dimensional skyrmions and other solitonic structures in confinement-frustrated chiral nematics. Phys. Rev. E 2014, 90, 012505. [Google Scholar] [CrossRef] [PubMed]
- Ackerman, P.J.; Boyle, T.; Smalyukh, I.I. Squirming motion of baby skyrmions in nematic fluids. Nat. Commun. 2017, 8, 673. [Google Scholar] [CrossRef]
- Sohn, H.R.O.; Smalyukh, I.I. Electrically powered motions of toron crystallites in chiral liquid crystals. Proc. Nat. Acad. Sci. U.S.A 2020, 117, 6437–6445. [Google Scholar] [CrossRef]
- Fukuda, J.i.; Žumer, S. Quasi-two-dimensional Skyrmion lattices in a chiral nematic liquid crystal. Nat. Commun. 2011, 2, 246. [Google Scholar] [CrossRef]
- Posnjak, G.; Čopar, S.; Muševič, I. Points, skyrmions and torons in chiral nematic droplets. Sci. Rep. 2016, 6, 26361. [Google Scholar] [CrossRef]
- Ackerman, P.J.; Smalyukh, I.I. Static three-dimensional topological solitons in fluid chiral ferromagnets and colloids. Nat. Mater. 2017, 16, 426–432. [Google Scholar] [CrossRef] [PubMed]
- Guo, Y.; Afghah, S.; Xiang, J.; Lavrentovich, O.D.; Selinger, R.L.B.; Wei, Q.H. Cholesteric liquid crystals in rectangular microchannels: skyrmions and stripes. Soft Matter 2016, 12, 6312–6320. [Google Scholar] [CrossRef]
- Tai, J.S.B.; Smalyukh, I.I. Three-dimensional crystals of adaptive knots. Science 2019, 365, 1449–1453. [Google Scholar] [CrossRef]
- Zhao, H.; Tai, J.S.B.; Wu, J.S.; Smalyukh, I.I. Liquid crystal defect structures with Möbius strip topology. Nat. Phys 2023, 19, 451–459. [Google Scholar] [CrossRef]
- Sohn, H.R.O.; Ackerman, P.J.; Boyle, T.J.; Sheetah, G.H.; Fornberg, B.; Smalyukh, I.I. Dynamics of topological solitons, knotted streamlines, and transport of cargo in liquid crystals. Phys. Rev. E 2018, 97, 052701. [Google Scholar] [CrossRef] [PubMed]
- Dkhar, D.S.; Kumari, R.; Malode, S.J.; Shetti, N.P.; Chandra, P. Integrated lab-on-a-chip devices: Fabrication methodologies, transduction system for sensing purposes. Journal of Pharmaceutical and Biomedical Analysis 2023, 223, 115120. [Google Scholar] [CrossRef] [PubMed]
- Coelho, R.C.V.; Tasinkevych, M.; da Gama, M.M.T. Dynamics of flowing 2D skyrmions. J. Phys. Cond. Mat. 2021, 34, 034001. [Google Scholar] [CrossRef]
- Coelho, R.C.V.; Zhao, H.; Amaral, G.N.C.; Smalyukh, I.I.; da Gama, M.M.T.; Tasinkevych, M. "Hall" transport of liquid crystal solitons in Couette flow, 2024, [arXiv:cond-mat.soft/2405.10850].
- Coelho, R.C.V.; Zhao, H.; Tasinkevych, M.; Smalyukh, I.I.; Telo da Gama, M.M. Sculpting liquid crystal skyrmions with external flows. Phys. Rev. Res. 2023, 5, 033210. [Google Scholar] [CrossRef]
- Amaral, G.N.C.; Zhao, H.; Sedahmed, M.; Campante, T.; Smalyukh, I.I.; Tasinkevych, M.; da Gama, M.M.T.; Coelho, R.C.V. Liquid crystal torons in Poiseuille-like flows, 2024, [arXiv:cond-mat.soft/2409.09486].
- Duzgun, A.; Saxena, A.; Selinger, J.V. Alignment-induced reconfigurable walls for patterning and assembly of liquid crystal skyrmions. Phys. Rev. Res. 2021, 3, L012005. [Google Scholar] [CrossRef]
- Duzgun, A.; Nisoli, C.; Reichhardt, C.J.O.; Reichhardt, C. Directed motion of liquid crystal skyrmions with oscillating fields. New J. of Phys. 2022, 24, 033033. [Google Scholar] [CrossRef]
- Duzgun, A.; Nisoli, C.; Reichhardt, C.J.O.; Reichhardt, C. Commensurate states and pattern switching via liquid crystal skyrmions trapped in a square lattice. Soft Matter 2020, 16, 3338–3343. [Google Scholar] [CrossRef]
- Alvim, T.; Gama, M.M.T.d.; Tasinkevych, M. Collective variable model for the dynamics of liquid crystal skyrmions. Communications Physics 2024, 7. [Google Scholar] [CrossRef]
- Long, C.; Selinger, J.V. Coarse-grained theory for motion of solitons and skyrmions in liquid crystals. Soft Matter 2021, 17, 10437–10446. [Google Scholar] [CrossRef]
- Teixeira, A.W.; Tasinkevych, M.; Dias, C.S. Particle-based model of liquid crystal skyrmion dynamics. Soft Matter 2024, 20, 2088–2099. [Google Scholar] [CrossRef]
- Ericksen, J.L. Hydrostatic theory of liquid crystals. Archive for Rational Mechanics and Analysis 1962, 9, 371–378. [Google Scholar] [CrossRef]
- Leslie, F.M.; Green, A.E. Some thermal effects in cholesteric liquid crystals. Proceedings of the Royal Society of London. Series A. Mathematical and Physical Sciences 1968, 307, 359–372. [Google Scholar] [CrossRef]
- Stewart, I.W. The static and dynamic continuum theory of liquid crystals: a mathematical introduction; Crc Press, 2019.
- Krüger, T.; Kusumaatmaja, H.; Kuzmin, A.; Shardt, O.; Silva, G.; Viggen, E.M. The Lattice Boltzmann Method - Principles and Practice; Springer International Publishing, 2016.
- Succi, S. The Lattice Boltzmann Equation: For Complex States of Flowing Matter; Numerical Mathematics and Scientific Computation Series, Oxford University Press, 2018.
- Turk, J.; Svenšek, D. Backflow-mediated domain switching in nematic liquid crystals. Phys. Rev. E 2014, 89, 032508. [Google Scholar] [CrossRef]
- Kirk, D.B.; Hwu, W.m.W. Programming Massively Parallel Processors: A Hands-on Approach, 1st ed.; Morgan Kaufmann Publishers Inc.: San Francisco, CA, USA, 2010. [Google Scholar]
- Guo, Z.; Zheng, C.; Shi, B. Discrete lattice effects on the forcing term in the lattice Boltzmann method. Phys. Rev. E 2002, 65, 046308. [Google Scholar] [CrossRef]
- Doi, M. Soft Matter Physics; Oxford University Press, 2013. [CrossRef]
Figure 1.
Snapshots of a toron flowing close to a pillar. (a) z-component of the director field in the mid- xy plane. (b) z-component of the director field in the xz plane that intercepts the geometric centre of the toron. (c) magnitude of the velocity field in the mid-xy plane. (d) the magnitude of the velocity field in the xz plane that intercepts the geometric centre of the toron. The white arrow indicates the direction of the flow. The impact parameter of the obstacle is m.
Figure 1.
Snapshots of a toron flowing close to a pillar. (a) z-component of the director field in the mid- xy plane. (b) z-component of the director field in the xz plane that intercepts the geometric centre of the toron. (c) magnitude of the velocity field in the mid-xy plane. (d) the magnitude of the velocity field in the xz plane that intercepts the geometric centre of the toron. The white arrow indicates the direction of the flow. The impact parameter of the obstacle is m.
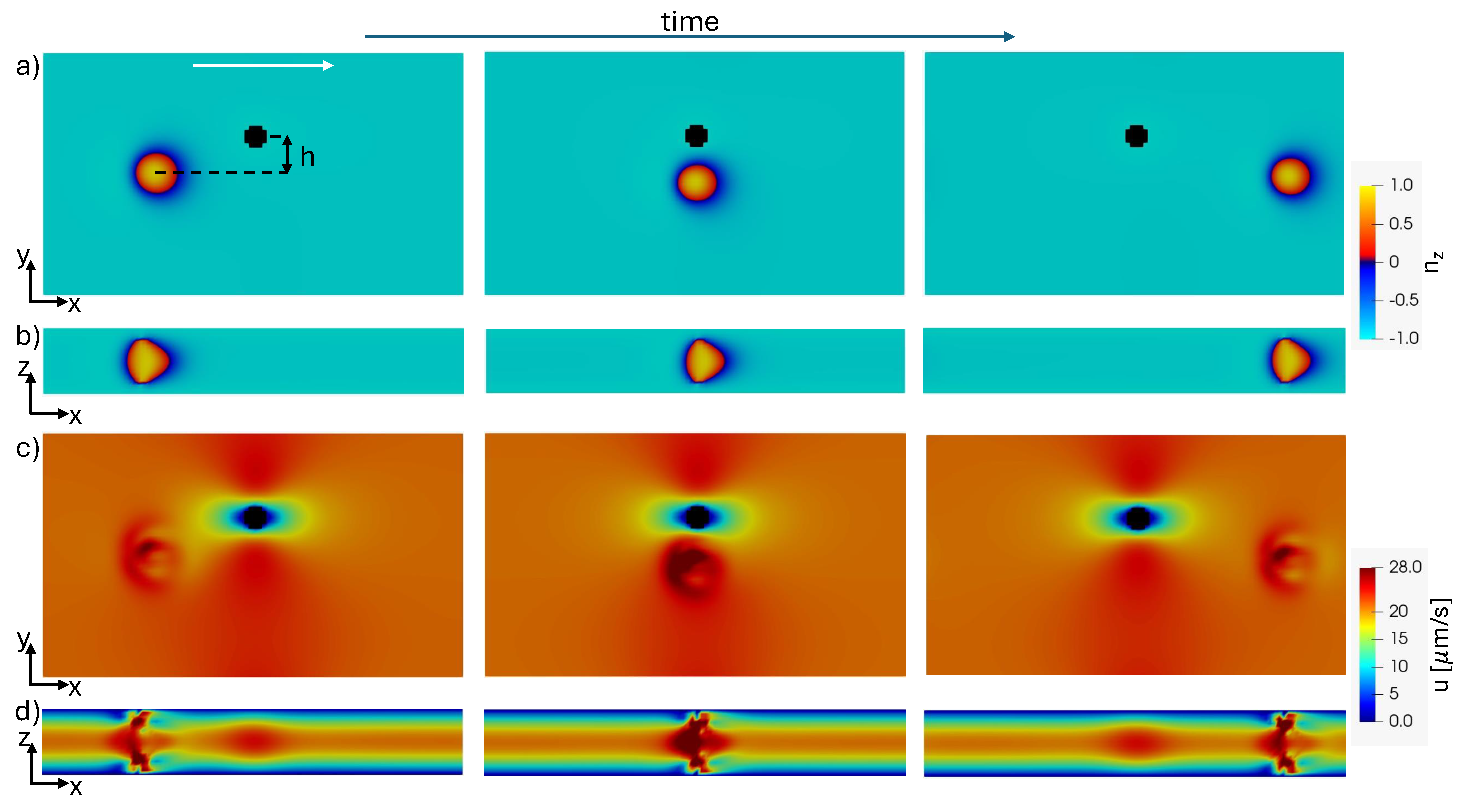
Figure 2.
Trajectories of torons deflected by pillars at different impact parameters, i.e., the lateral distance between the toron’s initial trajectory and the pillar’s centre, h (legend in m). The colour of the pillars is the same as that of the corresponding trajectories. Torons that are destabilized and destroyed by the impact are indicated in the figure. The inset on the left depicts the dependence of the vertical deflection of the toron trajectory, , on the impact parameter, h. The solid line is an exponential fit to the data. The inset on the right shows the toron velocity as a function of the position.
Figure 2.
Trajectories of torons deflected by pillars at different impact parameters, i.e., the lateral distance between the toron’s initial trajectory and the pillar’s centre, h (legend in m). The colour of the pillars is the same as that of the corresponding trajectories. Torons that are destabilized and destroyed by the impact are indicated in the figure. The inset on the left depicts the dependence of the vertical deflection of the toron trajectory, , on the impact parameter, h. The solid line is an exponential fit to the data. The inset on the right shows the toron velocity as a function of the position.
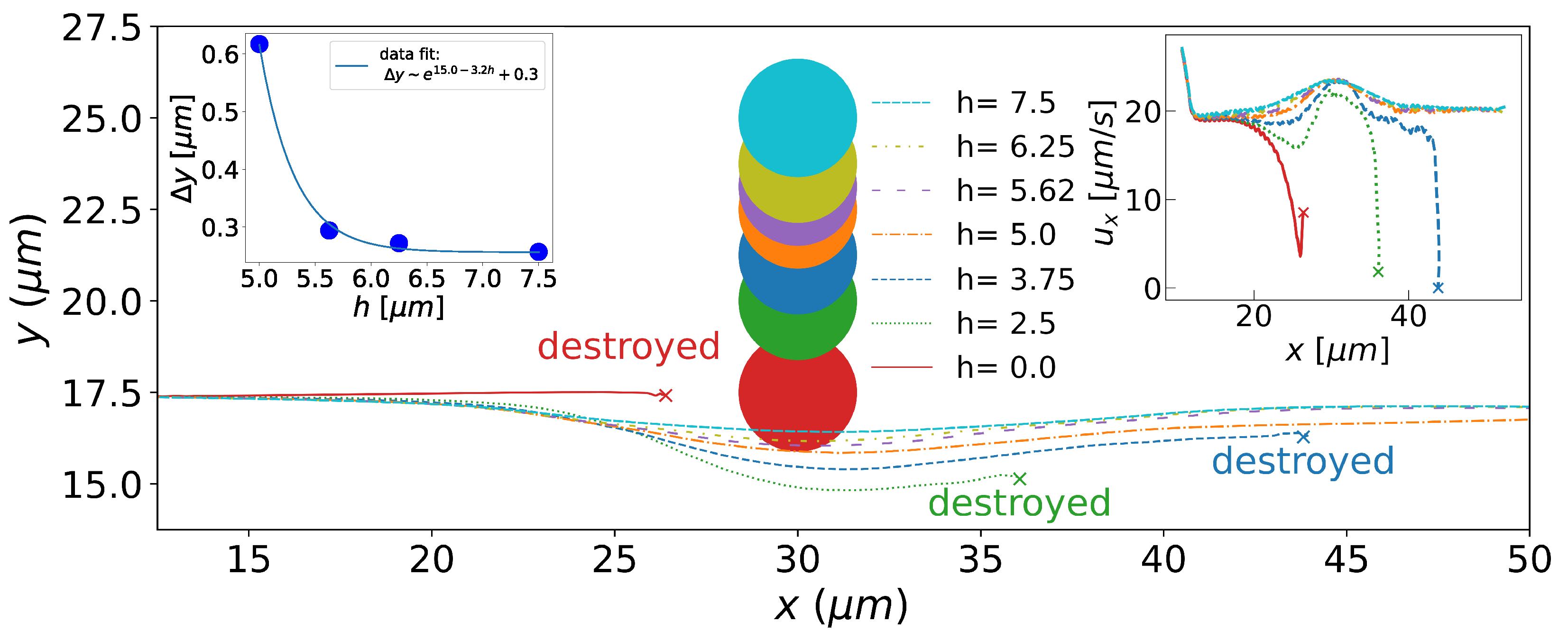
Figure 3.
Unstable toron flowing around a pillar. (a) z-component of the director field in the xy mid-plane. (b) z-component of the director field in the xz-plane that follows the geometric centre of the toron. The white arrow indicates the direction of the flow. The impact parameter of the obstacle is m.
Figure 3.
Unstable toron flowing around a pillar. (a) z-component of the director field in the xy mid-plane. (b) z-component of the director field in the xz-plane that follows the geometric centre of the toron. The white arrow indicates the direction of the flow. The impact parameter of the obstacle is m.
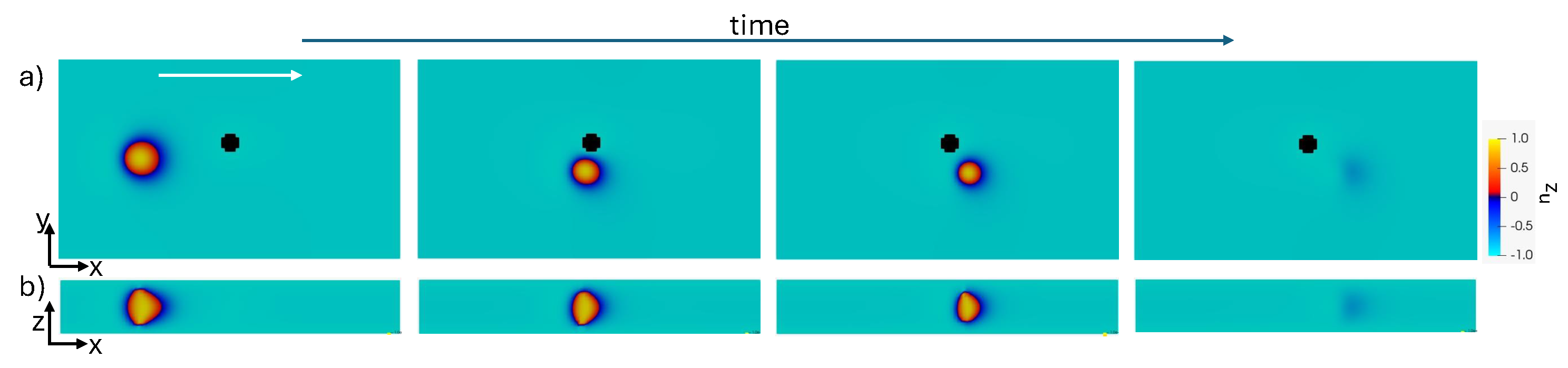
Figure 4.
Time evolution of the free energy of flowing torons around pillars, for different impact parameters h in m.
Figure 4.
Time evolution of the free energy of flowing torons around pillars, for different impact parameters h in m.
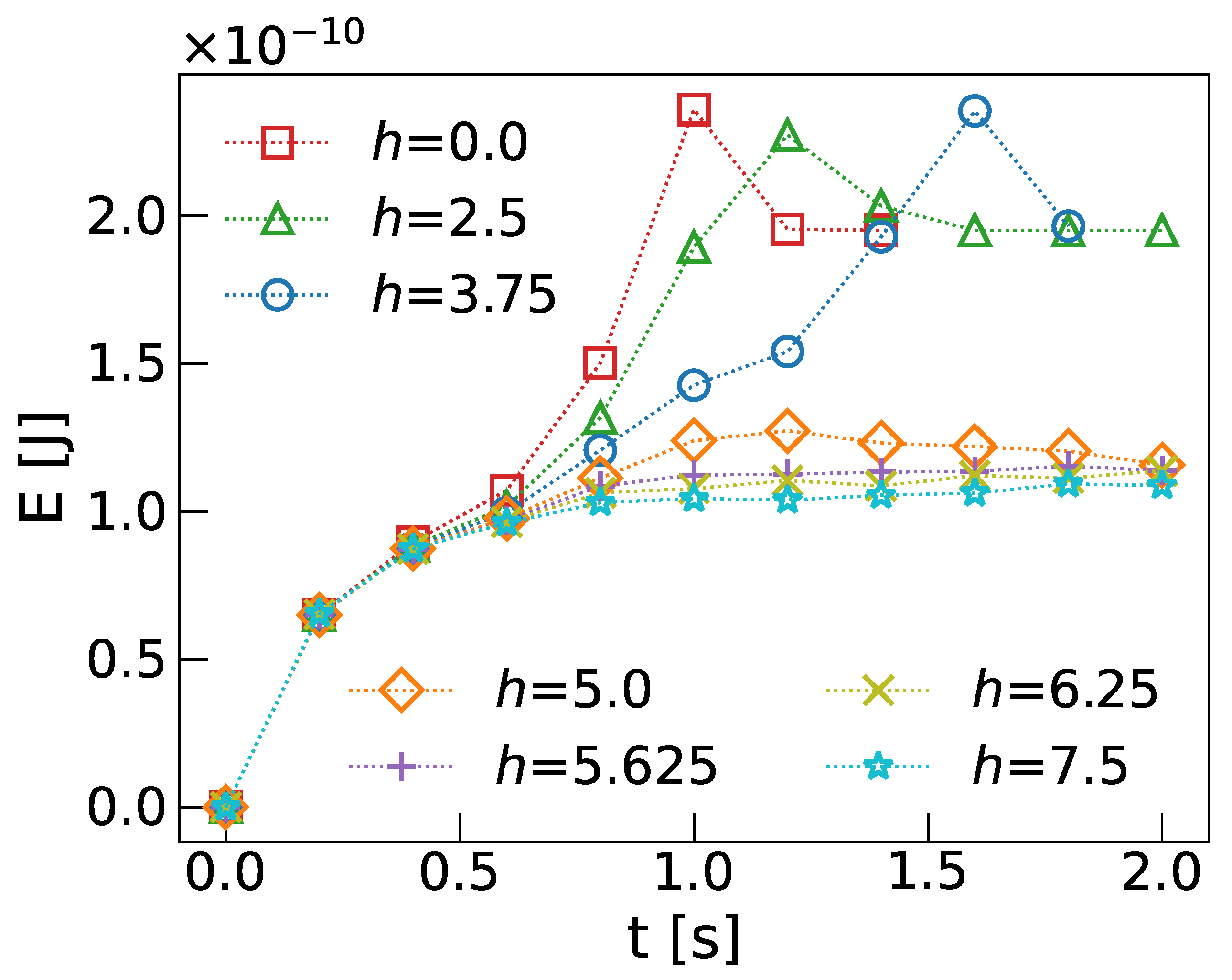
Figure 5.
Snapshots in the mid-plane of a toron flowing through two obstacles. (a) z-component of the director field. (b) Magnitude of the velocity field. The white arrow indicates the direction of the applied force. Each pillar has an impact parameter m. (c) Toron velocity as a function of the position for different values of h in m. The vertical lines on the top are the times when the toron flows between the pillars.
Figure 5.
Snapshots in the mid-plane of a toron flowing through two obstacles. (a) z-component of the director field. (b) Magnitude of the velocity field. The white arrow indicates the direction of the applied force. Each pillar has an impact parameter m. (c) Toron velocity as a function of the position for different values of h in m. The vertical lines on the top are the times when the toron flows between the pillars.
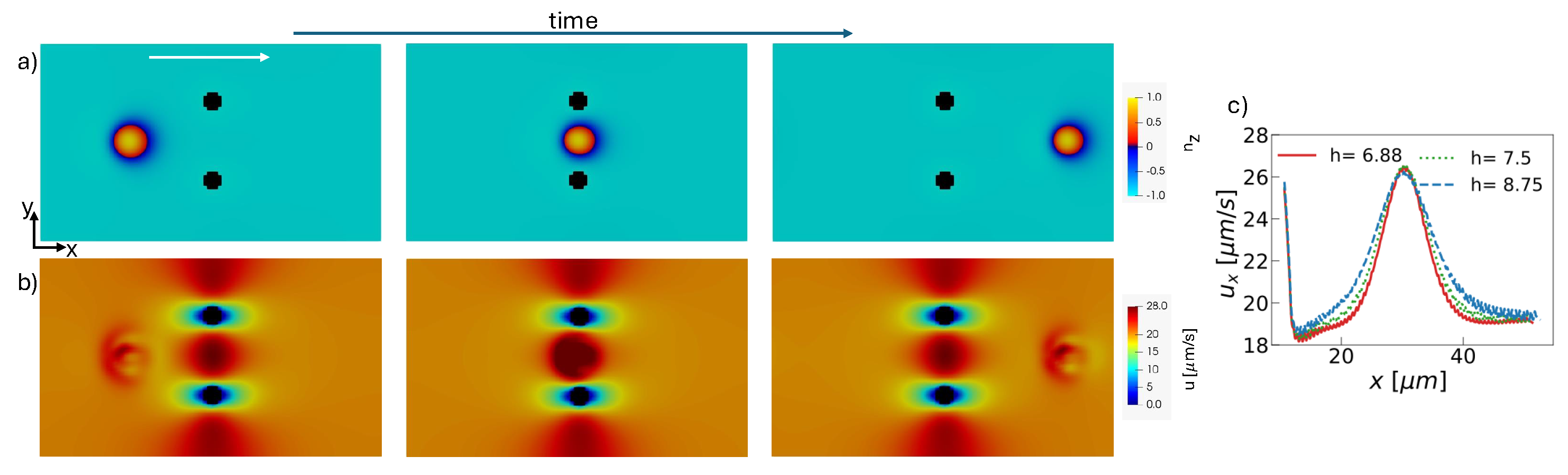

Table 1.
Parameters used in the simulation and physical units.
 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



