
Submitted:
16 January 2025
Posted:
17 January 2025
You are already at the latest version
Abstract
Image compression is a critical area of research aimed at optimizing data storage and transmission while maintaining image quality. This paper explores the application of clustering techniques as a means to achieve efficient and high-quality image compression. We systematically analyze nine clustering methods: K-Means, BIRCH, Divisive Clustering, DBSCAN, OPTICS, Mean Shift, GMM, BGMM, and CLIQUE. Each technique is evaluated across a variety of parameters, including block size, number of clusters, and other method-specific attributes, to assess their impact on compression ratio and structural similarity index. The experimental results reveal significant differences in performance among the techniques. K-Means, Divisive Clustering, and CLIQUE emerge as reliable methods, balancing high compression ratios and excellent image quality. In contrast, techniques like Mean Shift, DBSCAN, and OPTICS demonstrate limitations, particularly in compression efficiency. Experimental validation using benchmark images from the CID22 dataset confirms the robustness and applicability of the proposed methods in diverse scenarios.
Keywords:
image compression
; clustering techniques
; K-Means
; BIRCH
; divisive clustering
; DBSCAN
; OPTICS
; mean shift
; GMM
; BGMM
; CLIQUE
1. Introduction
Image compression is a critical field in computer science and digital communication, playing a vital role in reducing the storage and transmission requirements of digital images without significantly compromising their quality [1]. With the proliferation of multimedia applications, the demand for efficient compression techniques has increased exponentially. From social media platforms and cloud storage services to real-time video streaming [2] and medical imaging systems [3], the ability to store and transmit high-resolution images efficiently is paramount. Traditional compression methods have served well over the years; however, as technology evolves, so does the need for innovative techniques that address modern challenges, such as scalability, adaptability to different image types, and the ability to preserve essential details in various contexts [4].
Clustering techniques have emerged as a promising solution in the realm of image compression [5]. These methods leverage the inherent structure and patterns within an image to group similar pixel blocks into clusters. Each cluster is represented by a centroid, significantly reducing the amount of data needed to reconstruct the image [6]. Unlike traditional approaches that rely on predefined transformations or quantization schemes, clustering-based methods are data-driven and adaptive, making them well-suited for diverse image types and resolutions [7]. By analyzing and exploiting the spatial and spectral redundancies within images, clustering techniques can achieve high compression ratios while maintaining acceptable visual fidelity [8].
This paper explores the application of nine clustering techniques to image compression: K-Means, Balanced Iterative Reducing and Clustering using Hierarchies (BIRCH), Divisive Clustering, Density-Based Spatial Clustering of Applications with Noise (DBSCAN), Ordering Points to Identify the Clustering Structure (OPTICS), Mean Shift, Gaussian Mixture Models (GMM), Bayesian Gaussian Mixture Models (BGMM), and Clustering In Quest (CLIQUE). Each method offers unique advantages and challenges, depending on the characteristics of the image and the specific parameters used. One of the critical research questions is the importance of parameter tuning in achieving optimal results. For example, the choice of block size significantly impacts the performance of each technique [9]. Smaller block sizes often yield higher SSIM values (structural similarity index), preserving fine details in the image, but they also result in lower compression ratios due to the increased granularity [10]. Conversely, larger block sizes improve compression efficiency at the expense of detail retention, leading to pixelation and reduced visual fidelity. Similarly, clustering-specific parameters, such as the grid size in CLIQUE or the epsilon value in DBSCAN, play a pivotal role in determining the quality and efficiency of compression [11]. This underscores the need for a tailored approach when applying clustering techniques to image compression, taking into account the specific requirements of the application [12].
This paper provides a comprehensive exploration of clustering techniques for image compression, analyzing their performance in balancing image quality and compression efficiency. Here are the major contributions of the paper:
- It includes an in-depth review of nine clustering techniques: K-Means, BIRCH, Divisive Clustering, DBSCAN, OPTICS, Mean Shift, GMM, BGMM, and CLIQUE.
- A comparative analysis highlights the key characteristics, strengths, and limitations of each technique. This includes insights into parameter sensitivity, handling of clusters with varying densities, overfitting tendencies, computational complexity, and best application scenarios.
- The paper outlines a universal framework for image compression using clustering methods, including preprocessing, compression, and decompression phases.
- Each clustering technique was implemented to achieve image compression by segmenting image blocks into clusters and reconstructing them using cluster centroids.
- The implementations are adapted for diverse clustering methods, ensuring consistency in preprocessing, compression, and decompression phases.
- The paper provides detailed analysis and interpretation for each clustering technique, addressing trade-offs between compression and quality.
- Rigorous experiments were conducted using benchmark images from CID22 to validate the compression efficiency and image quality for all clustering techniques.
- The results are synthesized into a clear discussion, ranking the techniques based on their effectiveness in achieving a balance between CR (compression ratio) and SSIM.
- Custom visualizations demonstrate the impact of varying block sizes and parameters for each technique, offering intuitive insights into their performance characteristics.
The remainder of this paper is organized as follows. Section 2 provides a detailed review of various clustering techniques, categorized into partitioning, hierarchical, density-based, distribution-based, and grid-based methods, along with a comparative analysis of their strengths and weaknesses. Section 3 presents the implementation and experimental evaluation of these clustering techniques, focusing on their performance across diverse datasets and configurations. Section 4 explains the compression and decompression processes facilitated by clustering methods, highlighting the role of clustering in achieving efficient image compression. Section 5 discusses the quality assessment metrics used to evaluate compression performance. Section 6 delves into the performance analysis of clustering techniques for image compression, providing insights into their efficiency and effectiveness. Section 7 validates the results using the CID22 dataset, demonstrating the practical applicability of the methods in real-world scenarios. Finally, Section 8 concludes the paper by summarizing the findings and proposing directions for future work.
2. Overview of Clustering Techniques
2.1. Partitioning Techniques
Partitioning clustering techniques divide a dataset into a set number of clusters by optimizing a specific objective function, such as minimizing the distance between data points and their assigned cluster centers [13]. These methods, require the user to specify the number of clusters in advance and are generally efficient for large datasets where a clear partitioning structure is desired [14].
2.1.1. K-Means
K-means clustering is a widely-used technique in data analysis that seeks to partition a dataset into a specified number of distinct groups, known as clusters [15]. The process begins by randomly selecting a set of initial centroids, each representing the center of a potential cluster. These centroids serve as starting points for the clustering process [16].
The algorithm then enters an iterative phase where each data point in the dataset is assigned to the nearest centroid, effectively grouping the data points into clusters based on their proximity to these central points [17]. The assignment for the i-th data point to the j-th centroid is given by:
Once all points are assigned, the centroids are recalculated by taking the mean of all data points within each cluster, ensuring that the centroids move to the center of their respective clusters:
where is the set of data points assigned to the j-th cluster and is the number of data points in that cluster.
This process of assignment and centroid recalculation repeats until convergence, which occurs when the centroids no longer shift significantly between iterations [17]. At this stage, the clusters are considered stable, and the algorithm halts. The final output is a partitioning of the dataset into clusters, with each data point assigned to one of the clusters based on its distance to the centroids.
K-means is particularly effective for datasets with spherical clusters of similar size and density, and it is valued for its simplicity and efficiency [18]. However, it does have limitations, such as sensitivity to the initial placement of centroids and difficulties in handling clusters of varying shapes and densities [19]. Despite these challenges, K-means remains a foundational tool in the field of cluster analysis, widely used in applications ranging from market segmentation to image compression [20].
2.1.2. BIRCH
Balanced Iterative Reducing and Clustering using Hierarchies, commonly known as BIRCH, is a hierarchical clustering algorithm designed for large datasets [21]. It aims to create compact summaries of data through a multi-phase process that efficiently builds clusters while minimizing memory usage and computational time.
The process begins with the construction of a Clustering Feature (CF) Tree, a height-balanced tree structure that summarizes the dataset [22]. The CF Tree is composed of Clustering Features, which are tuples representing subclusters. Each Clustering Feature stores essential information about a subcluster, including the number of points, the linear sum of points, and the squared sum of points. This compact representation allows BIRCH to handle large datasets efficiently.
As data points are sequentially inserted into the CF Tree, the algorithm identifies the appropriate leaf node for each point [23]. If the insertion of a point causes the diameter of a leaf node to exceed a predefined threshold, the node splits, and the tree adjusts to maintain its balance. This dynamic insertion process ensures that the CF Tree remains balanced and compact.
Once the CF Tree is built, BIRCH proceeds to the clustering phase. It can use various clustering algorithms, such as agglomerative clustering or k-means, to further refine the clusters [24]. The leaf nodes of the CF Tree, which contain compact summaries of the data, serve as input for this phase. By clustering these summaries instead of the entire dataset, BIRCH significantly reduces the computational complexity.
BIRCH’s strength lies in its ability to handle large datasets with limited memory resources [23]. The CF Tree structure enables incremental and dynamic clustering, making it well-suited for data streams and situations where the entire dataset cannot be loaded into memory simultaneously. The algorithm efficiently adjusts to changes in the dataset, maintaining its performance even as new data points are added.
However, BIRCH has some limitations. The initial phase, which involves building the CF Tree, is sensitive to the choice of the threshold parameter that controls the diameter of the leaf nodes [24]. An inappropriate threshold value can lead to suboptimal clustering results. Additionally, while BIRCH handles large datasets efficiently, it may not perform as well with very high-dimensional data, where the curse of dimensionality affects the clustering quality.
2.2. Hierarchical Techniques
Hierarchical clustering techniques build a tree-like structure of nested clusters by either iteratively merging smaller clusters into larger ones (agglomerative) or splitting larger clusters into smaller ones (divisive) [25]. These methods do not require a predetermined number of clusters and are well-suited for exploring the hierarchical relationships within data
2.2.1. Divisive Clustering
Divisive clustering, also known as top-down hierarchical clustering, is a method that begins with the entire dataset as a single, all-encompassing cluster and progressively splits it into smaller and more refined clusters [26]. This approach is fundamentally different from its counterpart, agglomerative clustering, which starts with individual data points and merges them into larger clusters.
The process initiates by treating the whole dataset as one large cluster. The algorithm then identifies the most appropriate way to divide this cluster into two smaller clusters :
where and are the centroids of the sub-clusters and , respectively.
This is typically done by finding the split that maximizes the dissimilarity between the resulting sub-clusters while minimizing the dissimilarity within each sub-cluster [26]. Various techniques, such as k-means clustering or other splitting criteria, can be employed to determine the optimal division. Once the initial split is made, the algorithm treats each of the resulting clusters as separate entities and recursively applies the same splitting procedure to each cluster. This recursive division continues, creating a hierarchical tree structure, until each cluster contains only a single data point or a predefined number of clusters is reached.
Divisive clustering excels at identifying global cluster structures because it starts with the entire dataset [27]. This holistic perspective allows it to make large-scale divisions that might be missed by methods that build up clusters from individual points. However, this approach can be computationally intensive, as each split requires considering all possible ways to partition the data.
Despite its computational demands, divisive clustering is particularly effective for datasets with a clear hierarchical structure or when the goal is to uncover large, distinct groupings within the data [26]. It is a powerful tool in the data analyst's arsenal, capable of revealing deep insights into the underlying patterns and relationships within complex datasets.
2.3. Density-Based Techniques
Density-based clustering techniques identify clusters by locating regions in the data space where data points are denser compared to the surrounding areas [28]. These methods do not require a predefined number of clusters, making them particularly effective in discovering clusters of arbitrary shapes and handling noise within the data.
2.3.1. DBSCAN
Density-Based Spatial Clustering of Applications with Noise, commonly known as DBSCAN, is a clustering technique that groups together data points that are closely packed while marking outliers as noise [29]. Unlike traditional clustering methods that focus on distance to centroids, DBSCAN identifies clusters based on the density of data points.
The process begins by defining two key parameters: (epsilon), the maximum distance between two points for one to be considered in the neighborhood of the other, and , the minimum number of points required to form a dense region (a cluster). With these parameters set, the algorithm starts with an arbitrary point in the dataset [30]. If this point has at least points within a radius of , it is marked as a core point, and a new cluster is initiated. The algorithm then iteratively examines all points within the radius of the core point. If these neighboring points meet the criterion, they are added to the cluster, and their neighborhoods are also explored. This process continues until no more points can be added to the cluster.
Points that do not have enough neighbors to form a dense region but are within distance of a core point are labeled as border points and are included in the nearest cluster. Points that do not fall within the radius of any core point are considered noise and are left unclustered.
DBSCAN excels at identifying clusters of arbitrary shapes and sizes, making it particularly effective for datasets with irregular or non-spherical clusters [31]. Moreover, it automatically determines the number of clusters based on the data's density structure, eliminating the need for a pre-specified number of clusters.
One of DBSCAN's key strengths is its robustness to outliers. Since noise points are explicitly marked and excluded from clusters, the presence of outliers does not significantly affect the clustering results [32]. However, the algorithm's performance is sensitive to the choice of and , which require careful tuning to achieve optimal clustering.
2.3.2. OPTICS
OPTICS, which stands for Ordering Points to Identify the Clustering Structure [33], is an advanced clustering technique that extends the capabilities of DBSCAN by addressing some of its limitations (Table 1). Unlike traditional clustering methods that require a predetermined number of clusters, OPTICS is designed to discover clusters of varying densities and sizes within a dataset.
The algorithm begins by defining the same parameters as in DBSCAN ( and ). The process starts with an arbitrary point in the dataset [34]. If this point has at least points within its radius, it is marked as a core point. The algorithm then calculates the core distance, which is the distance from the point to its nearest neighbor. Additionally, the reachability distance is computed for each point, representing the minimum distance at which a point can be reached from a core point.
OPTICS proceeds by iteratively visiting each point, expanding clusters from core points. Points within the neighborhood of a core point are added to the cluster, and their reachability distances are updated accordingly. This process creates an ordering of points based on their reachability distances, forming a reachability plot that visually represents the clustering structure.
One of OPTICS' strengths lies in its ability to handle datasets with clusters of varying densities [35]. By examining the reachability plot, one can identify clusters as valleys in the plot, where points are closely packed. Peaks in the plot represent sparse regions or noise. This approach allows OPTICS to detect clusters of different densities and sizes without a fixed eps value, offering greater flexibility compared to DBSCAN.
OPTICS also excels in handling noise and outliers. Points that do not fit well into any cluster are marked as noise, ensuring that the presence of outliers does not distort the clustering results [36]. This robustness to noise makes OPTICS particularly useful for real-world datasets where data may be imperfect or contain anomalies.
Despite its advantages, OPTICS can be computationally intensive, especially for large datasets. The algorithm's complexity arises from the need to calculate distances between points and maintain the reachability plot.
2.3.3. Mean Shift
Mean Shift is a versatile and non-parametric clustering technique that is particularly effective for identifying clusters in datasets without requiring the user to specify the number of clusters in advance [37]. Unlike many other clustering algorithms, which rely on distance-based metrics or predefined parameters, Mean Shift seeks to find clusters by iteratively shifting data points towards areas of higher density, effectively identifying the modes (peaks) of the data distribution.
The process begins with a set of data points distributed across a multidimensional space [37]. Each point is initially considered as a potential centroid, and the algorithm proceeds by defining a neighborhood around each point, determined by a kernel function. The most commonly used kernel is the Gaussian kernel, which assigns weights to points based on their distance from the center of the neighborhood, giving more influence to closer points.
In each iteration, the algorithm calculates the mean of the data points within the neighborhood:
where is the kernel function and is the bandwidth parameter. The current point is then shifted towards this mean , effectively "shifting" it towards a region of higher density. This process of calculating the mean and shifting the points continues iteratively until convergence, meaning the points stop moving significantly, indicating that they have reached the mode of the distribution.
As this process is repeated for all points in the dataset, points that converge to the same mode are grouped together, forming a cluster. The key strength of Mean Shift lies in its ability to automatically determine the number of clusters based on the underlying data distribution. Clusters are identified as regions where points converge to the same mode, while points that do not converge to a common mode are treated as noise or outliers.
One of the most notable advantages of Mean Shift is its ability to handle clusters of arbitrary shapes and sizes [38]. Since the algorithm is based on the density of data points rather than distance from a centroid, it is particularly effective for clustering datasets where the clusters are not necessarily spherical or evenly sized. This makes Mean Shift a powerful tool for applications where data often exhibits complex, non-linear structures.
However, Mean Shift does have some limitations. The choice of bandwidth, which determines the size of the neighborhood around each point, is crucial for the algorithm’s performance. A bandwidth that is too large may result in merging distinct clusters, while a bandwidth that is too small may lead to excessive fragmentation of clusters or failure to identify meaningful patterns. Additionally, Mean Shift can be computationally intensive, especially for large datasets, as the iterative shifting process requires multiple passes over the data [39].
2.4. Distribution-Based Techniques
Distribution-based clustering techniques assume that the data is generated from a mixture of underlying probability distributions [40]. These methods identify clusters by fitting the data to these distributions, typically optimizing the fit using statistical or probabilistic models.
2.4.1. GMM
Gaussian Mixture Models (GMM) is a sophisticated clustering technique that represents data as a mixture of several Gaussian distributions [41]. Unlike traditional clustering methods that assign each data point to a single cluster, GMM adopts a probabilistic approach, allowing each data point to belong to multiple clusters with certain probabilities.
The process begins with the assumption that the data is generated from a mixture of Gaussian distributions, each characterized by its mean and covariance matrix [41-42]. Each Gaussian component is characterized by a mean vector , a covariance matrix , and a mixing coefficient .
where:
The probability density function of the k-th Gaussian component is given by:
where is the dimensionality of the data. The number of Gaussian components (clusters) is predefined, and the goal is to estimate the parameters of these Gaussian distributions that best fit the data.
GMM utilizes the Expectation-Maximization (EM) algorithm to iteratively estimate the parameters [41,42]. The EM algorithm consists of two main steps: the Expectation (E) step and the Maximization (M) step. In the E-step, the algorithm calculates the probability (responsibility ) that each data point belongs to each Gaussian component based on the current parameter estimates. These probabilities reflect the degree to which each data point is associated with each cluster.
In the M-step, the algorithm updates the parameters of the Gaussian components (means, covariances, and mixture weights) to maximize the likelihood of the data given these responsibilities.
where is the effective number of data points assigned to the k-th component. The updated parameters are then used in the next E-step, and this iterative process continues until convergence, where the changes in the parameter estimates become negligible.
The result of the GMM clustering process is a probabilistic partitioning of the data [43]. Each data point is associated with a probability distribution over the clusters, rather than a hard assignment to a single cluster. The centroids of the clusters are the means of the Gaussian components, and the shapes of the clusters are determined by the covariance matrices.
GMM's probabilistic nature provides several advantages. It can model clusters of different shapes and sizes, making it more flexible than methods that assume spherical clusters. The algorithm also handles overlapping clusters well, as data points near the boundaries can belong to multiple clusters with different probabilities. This characteristic is particularly useful in applications where data points do not clearly belong to a single cluster.
However, GMM has some limitations. It requires the number of clusters to be specified in advance, which may not always be known. The algorithm can also be sensitive to the initial parameter estimates, and poor initialization can lead to suboptimal clustering results [44]. Additionally, GMM assumes that the data follows a Gaussian distribution, which may not be appropriate for all datasets.
2.4.2. BGMM
Bayesian Gaussian Mixture Models (BGMM) extend the GMM framework by incorporating Bayesian inference, offering a more flexible and probabilistically grounded approach to clustering [45]. BGMM introduces a prior distribution over the parameters of the Gaussian components, allowing for more robust modeling, particularly in situations where the number of clusters is uncertain or where the data may not fit well within the strict assumptions of traditional GMM.
The process begins similarly to GMM, where the data is assumed to be generated from a mixture of Gaussian distributions, each characterized by a mean and covariance matrix [46]. However, unlike GMM, where the number of clusters is fixed, BGMM places a prior distribution over the mixture weights, allowing the model to infer the optimal number of clusters from the data itself (see Table 2). This is achieved through a technique known as the Dirichlet Process (), which introduces a prior over the distribution of the mixture components:
where is the concentration parameter. For the mean and covariance , the Normal-Inverse-Wishart Prior (NIW) is applied:
where is the prior mean, is the scaling factor, is the scale matrix, and is the degrees of freedom. The posterior distribution of the parameters is updated using the observed data :
Then, a variational inference is used to approximate the posterior distribution with a simpler distribution q:
BGMM employs a variational inference approach to estimate the parameters, rather than the Expectation-Maximization algorithm used in GMM [47]. Variational inference approximates the posterior distribution of the parameters by optimizing a lower bound on the model evidence, iteratively refining the parameter estimates. This process not only updates the means and covariances of the Gaussian components but also adjusts the mixture weights according to the data, allowing the model to naturally determine the most likely number of clusters.
One of the key strengths of BGMM lies in its ability to automatically select the number of clusters based on the data [45]. The model does not require the user to specify the number of clusters in advance; instead, it infers this from the data by adjusting the mixture weights. Clusters that are not well-supported by the data will have their mixture weights driven to near zero, effectively eliminating them from the model. This feature makes BGMM particularly useful in situations where the true number of clusters is unknown or where there is uncertainty about the cluster structure.
Another advantage of BGMM is its ability to incorporate prior knowledge into the clustering process [45]. By placing priors on the parameters, BGMM allows the user to encode domain-specific knowledge or assumptions about the data, leading to more meaningful and interpretable clusters. This is particularly beneficial in applications where prior information is available, such as in medical diagnosis, where certain patterns or clusters are expected based on prior research.
BGMM also handles overlapping clusters and varying cluster shapes with greater flexibility than traditional GMM [48]. The incorporation of Bayesian inference allows the model to account for uncertainty in the data, leading to more robust clustering, especially in noisy or complex datasets. This probabilistic approach ensures that the model can adapt to the data's underlying structure, providing a more accurate representation of the clusters.
However, BGMM is computationally more intensive than GMM due to the variational inference process and the need to optimize a more complex objective function [47]. This can lead to longer runtimes, particularly for large datasets. Additionally, the choice of priors can influence the clustering results, and careful consideration is needed to ensure that the priors reflect the true nature of the data.
2.5. Grid-Based Techniques
Grid-based clustering methods divide the data space into a finite number of cells that form a grid structure, and then perform clustering based on the density of data points in these grid cells [49].
2.5.1. CLIQUE
CLIQUE, or Clustering In QUEst, is a density-based clustering technique specifically designed to handle the challenges of high-dimensional data [49]. Unlike traditional clustering algorithms that operate in the full data space, CLIQUE focuses on finding clusters in subspaces of the data. This is crucial for high-dimensional datasets, where clusters may only exist in certain combinations of dimensions and not in the full-dimensional space.
The process begins by dividing the data space into a grid of non-overlapping rectangular cells [50]. Each cell represents a specific region in the multidimensional space, and the density of data points within each cell is calculated. For each grid cell , the density is defined as the number of data points within the grid cell. A grid cell is considered dense if exceeds a specified density threshold .
What sets CLIQUE apart is its ability to automatically discover the subspaces where clusters exist. The algorithm searches through all possible subspaces, detecting clusters in each one by merging adjacent dense cells. This approach allows CLIQUE to uncover clusters that might be invisible when looking at the data in the full-dimensional space, making it particularly powerful for high-dimensional data mining.
The end result of CLIQUE's clustering process is a set of clusters that can be represented as unions of dense cells within various subspaces [51]. This flexibility and ability to handle high-dimensional data make CLIQUE an essential tool for applications where the relevant features of the data may not be immediately apparent and where clusters are likely to exist in lower-dimensional subspaces rather than across the full dimensionality of the dat.
2.6. Comparative Analysis of Clustering Techniques
Table 3 provides a comprehensive comparison of the presented clustering techniques. Each method is evaluated across multiple criteria, such as parameter requirements, sensitivity, handling of varying cluster densities, and computational complexity. This comparative analysis aims to highlight the strengths and weaknesses of each approach, offering insights into their suitability for different types of data and clustering scenarios. By examining these key characteristics, the table serves as a guide to selecting the most appropriate clustering technique for specific applications.
3. Implementation and Experimental Evaluation of Clustering Techniques
This section explores the application and testing of various clustering techniques to evaluate their performance in partitioning datasets into distinct clusters. The analysis is performed independent of compression objectives, focusing on how effectively each method segments data and adapts to varying configurations. By examining how these techniques respond to changes in parameter values, the study reveals their strengths and limitations in adapting to data patterns. Figure 1 illustrates the legend used for clustering-related visualizations. It assigns specific colors to each cluster (Cluster 1 through Cluster 10), with additional markers for centroids (red star), noisy data points (black dot), and unclustered points (black solid).
Figure 2 demonstrates the performance of the K-Means clustering algorithm across varying numbers of clusters, ranging from 1 to 9. In the first panel, with a single cluster, all data points are grouped together, resulting in a simplistic representation with limited separation between different regions. As the number of clusters increases to 2 and 3, a more distinct segmentation emerges, reflecting K-Means' ability to partition the data into groups that minimize intra-cluster variance.
At 4 and 5 clusters, the algorithm begins to capture finer structures in the dataset, effectively separating points based on their proximity and density. This segmentation reflects the algorithm's ability to balance between over-simplification and over-segmentation. As the number of clusters increases further to 6, 7, and beyond, the algorithm divides the data into smaller, more granular groups. This results in more localized clusters, potentially overfitting if the dataset does not naturally support such fine granularity.
Figure 3 illustrates the performance of the BIRCH algorithm as the number of clusters increases from 1 to 9. With a single cluster, all data points are aggregated into one group, offering no segmentation and overlooking the underlying structure of the data. As the number of clusters increases to 2 and 3, the algorithm begins to create more meaningful separations, delineating regions of the data based on density and distribution.
With 4 and 5 clusters, the segmentation becomes more refined, capturing the natural groupings within the dataset. BIRCH effectively identifies cohesive regions, even in the presence of outliers, as indicated by isolated points in the scatterplot. The hierarchical nature of BIRCH is evident as it progressively organizes the data into clusters, maintaining balance and reducing computational complexity.
At higher cluster counts, such as 7, 8, and 9, the algorithm demonstrates its capacity to detect smaller, more localized clusters. However, this can lead to over-segmentation, where naturally cohesive groups are divided into sub-clusters. The presence of outliers remains well-managed, with some points clearly designated as noise. Overall, BIRCH shows its strength in clustering data hierarchically, balancing efficiency and accuracy, especially for datasets with varying densities and outliers.
Figure 4 demonstrates the progression of the Divisive Clustering algorithm as it separates the data into an increasing number of clusters, from 1 to 9. Initially, with a single cluster, all data points are grouped together, ignoring any inherent structure in the data. This provides no meaningful segmentation and highlights the starting point of the divisive hierarchical approach.
As the number of clusters increases to 2 and 3, the algorithm begins to partition the data into distinct groups based on its inherent structure. These initial divisions effectively segment the data into broad regions, capturing the overall distribution while maintaining cohesion within the clusters.
With 4 to 6 clusters, the algorithm refines these groupings further, identifying smaller clusters within the larger ones. This refinement captures finer details in the dataset's structure, ensuring that densely populated areas are segmented appropriately. At this stage, Divisive Clustering demonstrates its ability to split clusters hierarchically, providing meaningful separations while maintaining a logical hierarchy.
At higher cluster counts, such as 7 to 9, the algorithm continues to divide existing clusters into smaller subgroups. This leads to a granular segmentation, effectively capturing subtle variations within the data. However, as the number of clusters increases, there is a risk of over-segmentation, where cohesive clusters are fragmented into smaller groups. Despite this, the algorithm handles outliers effectively, ensuring that isolated points are not erroneously grouped with larger clusters. Overall, Divisive Clustering effectively balances granularity and cohesion, making it well-suited for hierarchical data exploration.
Figure 5 illustrates the performance of the DBSCAN algorithm under varying eps and min_samples parameter configurations. DBSCAN's ability to detect clusters of varying density and its handling of noise are evident in the results.
With a small eps of 0.05 and min_samples (or minPts) set to 1, the algorithm identifies a large number of clusters (214), as the tight neighborhood criterion captures even minor density variations. This leads to over-segmentation and a significant amount of noise classified as individual clusters, reducing the interpretability of the results. Increasing min_samples to 3 under the same eps reduces the number of clusters (24) by merging smaller groups, though many data points remain unclustered. At min_samples 9, no clusters are identified, as the eps is too restrictive to form valid clusters.
When eps is increased to 0.1, the algorithm becomes less restrictive, capturing larger neighborhoods. For min_samples 1, the number of clusters decreases to 126, reflecting better grouping of data points. At min_samples 3, the results improve further, with fewer clusters (20) and more cohesive groupings. However, at min_samples 9, only 4 clusters are detected, with many points treated as noise.
With the largest eps value of 0.3, the algorithm identifies very few clusters, as the larger neighborhood radius groups most points into a few clusters. At min_samples 1, only 17 clusters are found, indicating over-generalization. For min_samples 3, the clusters reduce to 3, with most noise eliminated. Finally, at min_samples 9, only 2 clusters remain, demonstrating high consolidation but potentially missing finer details.
In summary, DBSCAN's clustering performance is highly sensitive to eps and min_samples. Smaller eps values capture local density variations, leading to over-segmentation, while larger values risk oversimplifying the data. Higher min_samples values improve robustness by eliminating noise but can under-cluster sparse regions. The results highlight DBSCAN's flexibility but emphasize the importance of parameter tuning for optimal performance.
Figure 6 demonstrates the performance of the OPTICS algorithm under varying min_samples and xi parameters. OPTICS, known for its ability to detect clusters of varying densities and hierarchical structures, shows its versatility and sensitivity to parameter adjustments.
For min_samples set to 5 and xi varying from 0.01 to 0.03, the algorithm identifies a relatively large number of clusters. At xi = 0.01, 19 clusters are detected, capturing fine density variations. As xi increases to 0.02 and 0.03, the number of clusters decreases slightly to 18 and 16, respectively. This reflects OPTICS' tendency to merge smaller clusters as the threshold for cluster merging becomes more lenient. Despite this reduction, the algorithm still captures intricate cluster structures and maintains a high level of detail.
When min_samples increases to 10, the number of clusters decreases significantly. At xi = 0.01, only 5 clusters are found, reflecting stricter density requirements for forming clusters. As xi increases to 0.02 and 0.03, the cluster count further decreases to 5 and 4, respectively, with some finer details being lost. This highlights the impact of min_samples in reducing noise sensitivity but at the cost of losing smaller clusters.
For min_samples set to 20, the clustering results are highly simplified. Across all xi values, only 2 clusters are consistently detected, indicating a significant loss of detail and overgeneralization. While this reduces noise and improves cluster compactness, it risks oversimplifying the dataset and merging distinct clusters.
Overall, the results show that OPTICS performs well with low min_samples and small xi values, capturing fine-grained density variations and producing detailed cluster structures. However, as these parameters increase, the algorithm shifts towards merging clusters and simplifying the structure, which may lead to a loss of critical information in datasets with complex density variations. These findings emphasize the importance of careful parameter tuning to balance detail retention and noise reduction.
Figure 7 illustrates the performance of the Mean Shift clustering algorithm applied to the dataset, with varying bandwidth values from 0.1 to 5. Mean Shift is a non-parametric clustering method that groups data points based on the density of data in a feature space. The bandwidth parameter, which defines the kernel size used to estimate density, plays a critical role in determining the number and quality of clusters.
At a small bandwidth of 0.1, the algorithm detects 143 clusters, indicating a high sensitivity to local density variations. This results in many small clusters, capturing fine details in the dataset. However, such granularity may lead to over-segmentation, with clusters potentially representing noise rather than meaningful groupings. As the bandwidth increases to 0.2 and 0.3, the number of clusters decreases to 60 and 37, respectively. The algorithm begins merging smaller clusters, creating a more structured and meaningful segmentation while still retaining some level of detail.
With a bandwidth of 0.5, the cluster count drops sharply to 13, showing a significant reduction in granularity. The clusters become larger and less detailed, which may improve computational efficiency but risks oversimplifying the dataset. As the bandwidth continues to increase to 1 and beyond (e.g., 2, 3, 4, and 5), the number of clusters reduces drastically to 2 or even 1. At these high bandwidths, the algorithm generalizes heavily, resulting in overly simplistic cluster structures. This can lead to the loss of critical information and may render the clustering ineffective for datasets requiring fine-grained analysis.
In summary, the Mean Shift algorithm's clustering performance is highly dependent on the bandwidth parameter. While smaller bandwidths allow for detailed and fine-grained clustering, they may result in over-segmentation and sensitivity to noise. Larger bandwidths improve generalization and computational efficiency but at the cost of significant loss of detail and potential oversimplification. Optimal bandwidth selection is essential to balance the trade-off between capturing meaningful clusters and avoiding over-generalization.
Figure 8 demonstrates the performance of the GMM clustering algorithm, evaluated across different numbers of components, ranging from 1 to 9. GMM is a probabilistic model that assumes data is generated from a mixture of several Gaussian distributions, making it flexible for capturing complex cluster shapes. The number of components directly determines the number of clusters.
With a single component, the GMM produces a single, undifferentiated cluster, resulting in poor segmentation. All data points are grouped together, reflecting the model's inability to distinguish underlying structures in the dataset. As the number of components increases to 2 and 3, the algorithm begins to form meaningful clusters, capturing distinct groupings in the data. However, overlapping clusters are still evident, indicating limited separation.
At 4 components, the clustering becomes more refined, and distinct patterns start emerging. The data points are grouped more accurately into cohesive clusters, demonstrating the ability of GMM to model underlying structures. As the number of components increases to 5, 6, and 7, the algorithm continues to improve in capturing finer details and separating overlapping clusters. This results in a more accurate representation of the dataset, as observed in the clearer segmentation of the clusters.
By 8 and 9 components, the clustering is highly granular, with minimal overlap between clusters. However, the increased number of components may lead to overfitting, where the algorithm begins to model noise as separate clusters. This trade-off highlights the importance of carefully selecting the number of components to balance accuracy and generalizability.
In summary, GMM effectively models the dataset's underlying structure, with improved clustering performance as the number of components increases. However, excessive components can lead to overfitting, underscoring the need for optimal parameter selection. This makes GMM a versatile and robust choice for applications requiring probabilistic clustering.
Figure 9 illustrates the clustering performance of the BGMM clustering algorithm across a range of component counts from 2 to 10. BGMM, unlike GMM, incorporates Bayesian priors to determine the optimal number of components, providing a probabilistic framework for clustering. This makes BGMM robust to overfitting, as it naturally balances the trade-off between model complexity and data representation.
At the lower component counts (2 to 3 components), BGMM effectively identifies broad clusters in the dataset. For 2 components, the algorithm forms two distinct clusters, offering a coarse segmentation of the data. Increasing the components to 3 enhances granularity, with the addition of a third cluster capturing finer details within the dataset.
As the number of components increases to 4, 5, and 6, BGMM achieves progressively finer segmentation, forming clusters that better align with the underlying data structure. Each additional component introduces greater specificity in capturing subgroups within the data, reflected in well-defined clusters. The transitions between clusters are smooth, indicating the algorithm's ability to probabilistically assign points to clusters, even in overlapping regions.
From 7 to 9 components, BGMM continues to refine the clustering process, but the benefits of additional components start to diminish. At 9 and 10 components, the model begins to overfit, with some clusters capturing noise or forming redundant groups. Despite this, the clusters remain relatively stable, showcasing BGMM's ability to avoid drastic overfitting compared to GMM.
In conclusion, BGMM demonstrates robust clustering performance across varying component counts. While the algorithm effectively captures complex data structures, it benefits from the Bayesian prior that discourages excessive components. This makes BGMM particularly suited for scenarios where a balance between precision and generalizability is crucial. Figure 9 emphasizes the importance of selecting an appropriate number of components to maximize clustering efficiency and accuracy.
Figure 10 demonstrates the clustering results of the CLIQUE algorithm under varying grid sizes, showcasing its performance and adaptability. At a grid size of 1, no clusters are detected, which indicates that the granularity is too coarse to capture meaningful groupings in the dataset. As the grid size increases to 2 and 3, the algorithm begins to detect clusters, albeit sparingly, with one and four clusters identified, respectively. This improvement in cluster detection shows that a finer grid allows the algorithm to better partition the space and identify denser regions.
From grid size 4 to 6, there is a steady increase in the number of clusters found, reaching up to eight clusters. The results reveal that moderate grid sizes provide a balance between capturing meaningful clusters and avoiding excessive noise or fragmentation in the data. Notably, the identified clusters at these grid sizes appear well-separated and align with the data's inherent structure.
For larger grid sizes, such as 7 to 9, the number of clusters continues to grow, with up to 16 clusters detected. However, these finer grids risk over-partitioning the data, potentially splitting natural clusters into smaller subgroups. While the increase in clusters reflects a more detailed segmentation of the data, it might not always represent the most meaningful groupings, especially in practical applications.
Overall, the CLIQUE algorithm demonstrates its ability to adapt to different grid sizes, with the grid size playing a critical role in balancing cluster resolution and interpretability. Lower grid sizes result in under-detection of clusters, while excessively high grid sizes may lead to over-fragmentation. Moderate grid sizes, such as 4 to 6, seem to strike the optimal balance, capturing the data's underlying structure without overcomplicating the clustering.
4. Compression and Decompression Framework Using Clustering Techniques
Image compression using clustering techniques leverages the principle of grouping similar data points (pixels or blocks of pixels) into clusters, each represented by a centroid. The process is divided into two main phases: compression and decompression, each involving several steps.
4.1. Compression Phase
The compression phase aims to reduce the image's size by representing groups of similar pixel values with a representative centroid (Figure 11). This phase involves the following detailed steps:
4.1.1. Image Preprocessing
The input image is first converted into a numerical format, typically a three-dimensional array for RGB images. If needed, the image can be converted to grayscale for simplicity (Channels’ separation). To ensure compatibility with clustering algorithms, the image is divided into non-overlapping blocks of a predefined size (e.g., 2x2 or 4x4). Each block is flattened into a one-dimensional vector, forming the dataset for clustering.
4.1.2. Clustering Initialization
A suitable clustering algorithm is selected (e.g., K-Means, DBSCAN, GMM, ...). The number of clusters or other algorithm-specific parameters (e.g., grid size for CLIQUE, eps for DBSCAN, …) are defined. The goal is to minimize intra-cluster differences and maximize inter-cluster differences.
4.1.3. Clustering Process
Each block vector is assigned to the nearest cluster based on a similarity metric (e.g., Euclidean distance). The cluster is represented by its centroid, which is a vector that minimizes the distance to all members of the cluster. In techniques like K-Means, centroids are iteratively updated until convergence. Grid-based methods (e.g., CLIQUE) use predefined grid structures to group blocks.
4.1.4. Centroid Quantization
The centroids, which represent the compressed version of the blocks, are quantized into a fixed range (e.g., 0–255 for image pixel values). This step ensures compatibility with image reconstruction.
4.1.5. Index Encoding
Each block in the original image is replaced with the index of the centroid to which it belongs. This mapping is saved in an index table. Together, the centroid values and index table form the compressed representation of the image.
4.1.6. Run-Length Lossless Compression
The compressed file consists of two main components: the centroid table and the index table. Both are saved in a binary format. To further reduce the size, the compressed data (centroid table and index table) is passed through a run-length lossless compression algorithm. Tools like Gzip or WinRAR compress repetitive patterns in the index table and centroid values. The output is a highly compact binary file that contains the run-length compressed centroid and index data.
4.2. Decompression Phase
The decompression phase reconstructs the original image (or its approximate version) from the compressed data (Figure 12). It involves the following steps:
4.2.1. Loading the Compressed Data
The compressed file is read and passed through a run-length lossless decompression algorithm (e.g., Gzip or WinRAR) to extract the centroid and index tables. These represent the core information required for reconstruction.
4.2.2. Block Reconstruction
Each block in the decompressed image is reconstructed by replacing the index in the index table with the corresponding centroid vector from the centroid table. The centroid vector is reshaped back to its original block dimensions (e.g., 2x2 or 4x4).
4.2.3. Image Assembly
The reconstructed blocks are reassembled into their original positions to form the decompressed image. This step restores the spatial structure of the image.
4.2.4. Post-Processing
Any artifacts introduced during compression (e.g., boundary mismatches between blocks) may be reduced using optional smoothing or filtering techniques. However, this step is not always necessary, depending on the clustering method used.
5. Quality Assessment Metrics for Image Compression
Evaluating the quality of image compression is critical to balancing the trade-off between reducing file size and preserving visual fidelity. This section provides a detailed explanation of three key metrics: Compression Ratio (CR), Bits Per Pixel (BPP), and Structural Similarity Index (SSIM). Each metric quantifies different aspects of compression performance, including file size reduction, efficiency, and perceived image quality.
5.1. Compression Ratio (CR)
Compression Ratio (CR) measures how much the original image has been compressed [8]. It is the ratio of the original image size to the compressed image size, expressed mathematically as:
Where:
- : Size of the original image file (in bytes).
- : Size of the compressed image file (in bytes).
A higher CR indicates a greater reduction in file size, which is desirable for applications where storage or bandwidth constraints are a priority.
5.2. Bits Per Pixel (BPP)
Bits Per Pixel (BPP) quantifies the average number of bits used to represent each pixel in the compressed image [8]. It reflects the efficiency of compression in terms of information density and is calculated as:
Where:
- : Size of the compressed image file (in bytes).
- : Height of the image (in pixels).
- : Width of the image (in pixels).
- The factor 8 converts bytes to bits.
A lower BPP signifies a higher degree of compression efficiency, meaning fewer bits are used to encode the image without significantly degrading its quality.
5.3. Structural Similarity Index (SSIM)
SSIM is a perceptual metric that quantifies the visual similarity between the original and compressed images [8]. Unlike pixel-wise comparisons (e.g., Mean Squared Error or Peak Signal-to-Noise Ratio), SSIM considers structural information, luminance, and contrast. It is defined as:
Where:
- and : Corresponding image patches from the original and compressed images, respectively.
- and : Mean intensities of and .
- and : Variances of and .
- : Covariance of and .
- and : Small constants to stabilize the division when the denominator is close to zero.
A higher SSIM value, closer to 1, indicates greater similarity between the original and compressed images, suggesting minimal perceptual degradation.
6. Comprehensive Performance Analysis of Clustering Techniques in Image Compression
This section presents the performance evaluation of various clustering-based image compression techniques. Each method was applied to compress images using the proposed framework, followed by quantitative and qualitative assessments of the reconstructed images. Metrics such as CR, BPP, and SSIM were calculated to gauge the trade-offs between compression efficiency and image quality. The results highlight the strengths and limitations of each method, offering insights into their suitability for different compression scenarios. The findings are summarized and analyzed in the subsequent subsections.
The initial experimental results for image compression presented in this section utilized the widely recognized "Peppers" image (Figure 13), obtained from the Waterloo dataset [52], a benchmark resource for image processing research.
6.1. Kmeans Clustering for Compression
Figure 14 illustrates the results of image compression using the K-Means clustering algorithm with different block sizes and numbers of clusters. Starting with the smallest block size of 2x2 pixels, the images exhibit high SSIM values, close to 1, indicating a strong similarity to the original image. This high SSIM is expected because the small block size allows for finer granularity in capturing image details. However, as the number of clusters increases from 31 to 255, there is a noticeable trade-off between CR and BPP. When the number of clusters is low, the CR is relatively high (14.14) but the BPP is low (1.70), indicating efficient compression. As the number of clusters increases, the CR decreases significantly (6.13), while the BPP increases to 3.91. This indicates that the image quality is maintained at the cost of compression efficiency, as more clusters mean more distinct pixel groups, which reduces the compression ratio.
When the block size is increased to 4x4 pixels, the reconstructed images still maintain high SSIM values, though slightly lower than with the 2x2 block size. This decrease in SSIM is due to the larger block size capturing less fine detail, making the reconstruction less accurate. The compression ratio improves significantly, reaching as high as 48.09 when using 31 clusters. However, as with the 2x2 block size, increasing the number of clusters leads to a reduction in the compression ratio (down to 18.30 with 255 clusters) and an increase in BPP, indicating that more data is needed to preserve the image quality. The images with 4x4 blocks and a higher number of clusters show a good balance between compression and quality, making this configuration potentially optimal for certain applications where moderate image quality is acceptable with better compression efficiency.
The 8x8 block size introduces more noticeable artifacts in the reconstructed images, particularly as the number of clusters increases. Although the compression ratio remains high, the SSIM values start to drop, especially as we move to higher cluster counts. The BPP values are also lower compared to smaller block sizes, indicating higher compression efficiency. However, this comes at the expense of image quality, as larger blocks are less effective at capturing the fine details of the image, leading to a more pixelated and less accurate reconstruction. The trade-off is evident here: while the compression is more efficient, the image quality suffers, making this configuration less desirable for applications requiring high visual fidelity.
Finally, the largest block size of 16x16 pixels shows a significant degradation in image quality, particularly when a high number of clusters are used. The SSIM values decrease noticeably, reflecting the loss of detail and the introduction of more visible artifacts. The compression ratios are very high, with a maximum CR of 48.20, but the images appear much more pixelated and less recognizable compared to those with smaller block sizes. This indicates that while large block sizes are highly efficient for compression, they are not suitable for scenarios where image quality is a priority. The BPP values also vary significantly, with lower cluster counts resulting in very low BPP, but as clusters increase, the BPP rises, indicating that the image quality improvements come at the cost of less efficient compression.
In summary, the Figure 14 demonstrates that the K-Means clustering algorithm's effectiveness for image compression is highly dependent on the choice of block size and the number of clusters. Smaller block sizes with a moderate number of clusters offer a good balance between image quality and compression efficiency, making them suitable for applications where both are important. Larger block sizes, while more efficient in terms of compression, significantly degrade image quality and are less suitable for applications requiring high visual fidelity. The results highlight the need to carefully select these parameters based on the specific requirements of the application, whether it prioritizes compression efficiency, image quality, or a balance of both.
6.2. BIRCH Clustering for Compression
Figure 15 displays a series of reconstructed images using the BIRCH clustering algorithm applied to image compression. Starting with the block size of 2x2, the images exhibit varying levels of quality depending on the threshold and branching factor used. For a block size of 2x2, with a threshold of 0.1 and a branching factor of 10, the SSIM values range around 0.219 to 0.241, indicating a moderate similarity to the original image. The CR is low, around 1.75 to 1.85, and the BPP is high, ranging from 12.94 to 13.74, reflecting a lower compression efficiency and a higher level of detail retention. However, as the threshold increases to 0.5, while keeping the branching factor constant at 10, the SSIM decreases significantly, with values dropping to as low as 0.163 to 0.184, indicating a deterioration in image quality. Despite this, the CR slightly improves, suggesting that more aggressive compression is taking place at the expense of image quality.
When increasing the branching factor to 50, the SSIM values decrease even further, especially for the higher threshold of 0.5, where the SSIM drops to 0.036 and 0.126. This indicates that the reconstructed images lose significant detail and structure, becoming almost unrecognizable. The BPP remains high, suggesting that although a large amount of data is being retained, it is not contributing positively to the image quality. The CR does not show significant improvement, which suggests that the BIRCH algorithm with these parameters might not be efficiently clustering the blocks in a way that balances compression with quality.
Moving to a block size of 4x4, the images generally show a deterioration in SSIM compared to the smaller block size, with SSIM values dropping to below 0.1 in several cases, particularly when the threshold is set to 0.5. The CR slightly improves in some cases, but the BPP increases, indicating that even though more bits are used per pixel, the quality does not improve and, in some cases, worsens significantly. For example, with a threshold of 0.5 and a branching factor of 50, the SSIM is 0.219, which is slightly better than other configurations with the same block size, but still low.
In summary, the BIRCH algorithm appears to struggle with balancing compression and image quality in this context, especially with larger block sizes and higher thresholds. The SSIM values suggest that as the threshold and branching factor increase, the algorithm fails to maintain structural similarity, leading to poor-quality reconstructions. The CR and BPP metrics indicate that while compression is occurring, it is not efficiently capturing the important details needed to reconstruct the image well. This suggests that BIRCH may not be the optimal clustering method for this type of image compression, particularly with larger block sizes and more aggressive parameter settings.
6.3. Divisive Clustering for Compression
Figure 16 presents the results of applying the Divisive clustering method to compress and reconstruct an image. Starting with a block size of 2x2, the images exhibit high SSIM values, close to 1, across different cluster sizes. This indicates that the Divisive method is able to preserve the structural similarity of the image well, even when the number of clusters increases from 31 to 255. However, as the number of clusters increases, the CR decreases, which is expected since a higher number of clusters typically requires more data to represent the image. For instance, with 31 clusters, the CR is 14.22, while with 255 clusters, it drops to 6.58. The BPP also increases with the number of clusters, reflecting the trade-off between compression and quality. Despite the increased BPP, the SSIM remains high, suggesting that the Divisive method is efficient in maintaining image quality at smaller block sizes.
When the block size is increased to 4x4, the CR improves significantly, reaching as high as 49.64 with 31 clusters, which is nearly three times higher than the CR for the 2x2 block size with the same number of clusters. This indicates that the Divisive method becomes more effective in compressing the image as the block size increases. However, there is a slight reduction in SSIM, especially when the number of clusters is increased. For instance, with 255 clusters, the SSIM drops to 0.996, still high but slightly lower than the smaller block sizes. The BPP remains low, which indicates that the larger block size allows for more efficient compression without a significant loss in quality.
At an 8x8 block size, the trend of improving CR continues, with the highest CR reaching 93.01 for 31 clusters. This is an impressive result, showing that the Divisive method is particularly well-suited for compressing images with larger block sizes. However, the SSIM begins to show more noticeable reductions, particularly as the number of clusters increases. The SSIM drops to 0.991 with 255 clusters, which, while still high, indicates that some quality loss is occurring. The BPP remains low, demonstrating that the method is efficient in compressing the image at this block size.
Finally, at a 16x16 block size, the CR reaches its maximum of 48.66 with 31 clusters, but the SSIM drops to 0.952, indicating a more significant loss in image quality compared to smaller block sizes. With 255 clusters, the CR decreases to 23.74, and the SSIM improves slightly to 0.991, suggesting that increasing the number of clusters can help recover some of the lost image quality, albeit at the cost of lower compression efficiency. The BPP also increases, reflecting the need for more data to represent the larger block sizes with higher cluster counts.
In conclusion, the Divisive clustering method shows a strong ability to compress images effectively while maintaining high image quality, particularly at smaller block sizes. As the block size increases, the method becomes more efficient in terms of compression (higher CR), but this comes with a slight reduction in SSIM, especially when the number of clusters is high. The method demonstrates a good balance between CR, BPP, and SSIM, making it a viable option for applications where both compression efficiency and image quality are important. However, care should be taken when choosing the block size and the number of clusters to ensure that the desired balance between compression and quality is achieved.
6.4. DBSCAN and OPTICS Clustering for Compression
Figure 17 and Figure 18 represent the results of image compression using two clustering techniques: DBSCAN and OPTICS. Both methods are designed to identify clusters of varying densities and can handle noise effectively, which makes them particularly suitable for applications where the underlying data distribution is not uniform. However, the results demonstrate distinct differences in how each method processes the image blocks, especially under varying parameter settings, such as eps for DBSCAN and xi for OPTICS, along with the min_samples parameter common to both.
DBSCAN's performance across different block sizes and parameter configurations shows a stark contrast in image quality and compression metrics. At smaller block sizes (2x2), DBSCAN tends to find a very high number of clusters when the eps parameter is low, such as 0.1, and min_samples is set to 1. This results in an extremely high cluster count (e.g., 46,142 clusters found), but this comes at the cost of poor CR and BPP, as seen in Figure 17. The SSIM value remains high, indicating a good structural similarity, but the practical usability of such a high cluster count is questionable, as it results in high computational overhead and potentially overfitting the model to noise.
As the eps value increases (e.g., from 0.1 to 0.3) and min_samples rises, the number of clusters decreases significantly, which is accompanied by a drop in SSIM and an increase in CR and BPP. For instance, when eps is 0.3 and min_samples is 4, DBSCAN produces far fewer clusters, leading to much more compressed images but with significantly degraded quality, as evidenced by the low SSIM values. At larger block sizes (e.g., 4x4), DBSCAN's performance diminishes drastically, with the number of clusters dropping to nearly zero in some configurations. This results in almost no useful information being retained in the image, reflected in the SSIM dropping to zero, indicating a total loss of image quality.
OPTICS, which is similar to DBSCAN but provides a more nuanced approach to identifying clusters of varying densities, shows a different pattern in image processing. Like DBSCAN, the effectiveness of OPTICS is highly dependent on its parameters (xi and min_samples). xi complements min_samples by further refining how clusters are separated based on density changes. Figure 18 shows that, regardless of the block size, OPTICS identifies a very small number of clusters (often just 1), especially when xi is set to 0.3 and min_samples is varied. This leads to extremely high CR and very low BPP, but at the cost of significant image distortion and loss, as seen in the brownish, almost entirely abstract images produced.
One notable observation is that OPTICS tends to retain minimal useful image information even when identifying a single cluster, leading to highly compressed images with very high CR but nearly zero SSIM. This suggests that OPTICS, under these settings, compresses the image to the point of obliterating its original structure, making it less suitable for tasks where preserving image quality is essential.
When comparing DBSCAN and OPTICS, it becomes clear that while both methods aim to find clusters in data, their behavior under similar parameter settings leads to vastly different results. DBSCAN's flexibility in finding a large number of small clusters can either be an advantage or a hindrance depending on the parameter configuration, whereas OPTICS, in this particular case, consistently produces fewer clusters with more significant compression but at the cost of image quality. For instance, both techniques perform poorly with larger block sizes, but DBSCAN's sensitivity to eps and min_samples allows for more granular control over the number of clusters and the resulting image quality. On the other hand, OPTICS, while theoretically offering advantages in handling varying densities, does not seem to leverage these advantages effectively in this context, leading to overly aggressive compression. The images produced by DBSCAN with lower eps values and small min_samples show that it can maintain a relatively high SSIM while achieving reasonable compression, although this comes with a high computational cost due to the large number of clusters. In contrast, OPTICS, even with different settings, fails to preserve the image structure, resulting in images that are visually unrecognizable.
6.5. Mean Shift Clustering for Compression
Figure 19 presents the results of compressing an image using the Mean Shift clustering algorithm with varying block sizes and bandwidth parameters. In the first row of the figure, the block size is set to 2x2 pixels, and the results for different bandwidth values (0.1, 0.3, 1, and 2) are displayed. When the bandwidth is set to 0.1, the algorithm identifies 46,142 clusters, resulting in a high CR of 1.36 and a BPP of 17.61. The SSIM value, which indicates the structural similarity between the original and compressed image, remains at 1.000, suggesting perfect reconstruction.
As the bandwidth increases to 0.3, the number of clusters remains the same at 46,142, but there is no significant change in CR, BPP, or SSIM, indicating that a small change in bandwidth does not significantly affect the results for this block size.
When the bandwidth increases to 1, the number of clusters found decreases significantly to 30,598. This reduction in clusters is reflected in a slight increase in CR to 1.50 and a decrease in BPP to 16.05. The SSIM remains perfect at 1.0, indicating that the image quality is still maintained despite the reduction in clusters.
Further increasing the bandwidth to 2 results in a more noticeable reduction in the number of clusters to 14,686. This leads to a more substantial improvement in the compression ratio, which increases to 2.12, and a further reduction in BPP to 11.33. Again, the SSIM remains at 1.000, showing that the structural quality of the image is preserved even with a higher level of compression.
In the second row, the block size is increased to 4x4 pixels, and the impact of different bandwidth values is analyzed. For a bandwidth of 0.1, the algorithm identifies 16,261 clusters. The CR and BPP are slightly better than the 2x2 block size, with a CR of 1.48 and BPP of 16.21, and the SSIM remains perfect at 1.000.
Increasing the bandwidth to 0.3 results in a marginal decrease in the number of clusters to 16,242, with the CR and BPP remaining almost the same as before. This suggests that the Mean Shift algorithm's sensitivity to bandwidth is relatively low for this particular block size and image.
With a bandwidth of 1, the number of clusters remains at 16,261, with no change in CR, BPP, or SSIM compared to the lower bandwidth settings. This implies that the algorithm has reached a level of stability where changes in bandwidth do not significantly impact the clustering outcome or compression efficiency.
When the bandwidth is increased to 2, the number of clusters slightly decreases to 16,042. However, this reduction has minimal impact on the CR and BPP, which stay at 1.49 and 16.16, respectively. The SSIM remains perfect, indicating that the image quality is not compromised even with a moderate bandwidth.
Comparing the results across different block sizes and bandwidth settings, it is evident that Mean Shift is highly sensitive to the bandwidth parameter, particularly when the block size is small (2x2). The algorithm tends to identify a very high number of clusters when the bandwidth is small, leading to lower compression ratios and higher bits per pixel. However, the image quality remains high, as indicated by the perfect SSIM scores.
As the bandwidth increases, the number of clusters decreases significantly, resulting in higher compression ratios and lower bits per pixel, without compromising the image quality. This trend is more pronounced at smaller block sizes, where the impact of bandwidth on the number of clusters and compression efficiency is more evident.
At larger block sizes (4x4), the impact of bandwidth on the algorithm's performance is less pronounced. The number of clusters identified by Mean Shift does not change significantly across different bandwidth settings, resulting in only minor variations in CR, BPP, and SSIM. This suggests that the Mean Shift algorithm becomes less sensitive to bandwidth as the block size increases, making it a more stable choice for image compression with larger block sizes.
6.6. GMM and BGMM Clustering for Compression
Figure 20 and Figure 21 present the results of compressing an image using the GMM and BGMM clustering methods. Starting with the GMM results, we can observe how the block size impacts the compression performance and image quality. For smaller block sizes of 2x2, increasing the number of clusters from 31 to 255 shows a consistent decrease in CR from 12.63 to 5.88. This is expected, as more clusters should theoretically capture finer details, reducing compression effectiveness but improving image quality, as indicated by the rise in SSIM values from 0.972 to 0.989. However, as block size increases to 4x4 and 8x8, the CR improves significantly. For example, with a 4x4 block size, CR increases from 36.76 to 17.98 as the number of clusters grows from 31 to 255. However, this comes with a trade-off in image quality, where SSIM values drop from 0.842 to 0.956 as block size increases, suggesting that larger blocks and more clusters lead to overfitting, capturing more noise and thus reducing SSIM.
In contrast, BGMM results show a slightly different trend. At a block size of 2x2, the CR decreases similarly to GMM when increasing clusters, but BGMM appears to provide slightly better SSIM values at the cost of a slightly higher BPP. For instance, at 2x2 block size, the SSIM values range from 0.974 to 0.982 across cluster settings, indicating that BGMM retains better structural similarity at the cost of higher BPP, which ranges from 1.99 to 2.78. However, as the block size increases to 4x4 and 8x8, BGMM seems to outperform GMM in retaining image quality, especially in SSIM values, which are relatively stable, though it still suffers from an increase in CR and BPP.
Interestingly, at a block size of 16x16, both methods show signs of overfitting, with CR values increasing dramatically while SSIM values tend to plateau or decrease slightly. The BPP values for both GMM and BGMM increase with block size, indicating that while more data is being captured, it may not contribute positively to perceived image quality, as reflected in SSIM values.
A key observation is that GMM exhibits more pronounced changes in image quality across different block sizes and cluster settings compared to BGMM. BGMM, due to its probabilistic nature, likely provides more stable but less extreme results, which may explain why it performs better in retaining SSIM but at a higher BPP and often slightly worse CR.
Overall, the results indicate that both GMM and BGMM are effective clustering methods for image compression, but their performance is highly dependent on block size and the number of clusters. BGMM tends to provide more consistent image quality but at a higher cost in BPP, while GMM offers more aggressive compression but may lead to more noticeable degradation in quality at higher block sizes and cluster counts.
6.7. CLIQUE Clustering for Compression
Figure 22 presents the results of the CLIQUE clustering method applied for image compression with varying grid sizes, ranging from 1 to 8.5. The block size used in all experiments is fixed at 2x2, and the grid size controls the number of clusters and consequently affects compression performance and quality.
For grid sizes 1.5 and 2.0, the algorithm identifies only 1 and 16 clusters, respectively. These settings result in poor visual quality, as evidenced by the low SSIM values (0.014 and 0.864, respectively) and the inability to retain structural details in the image. The CR values are exceptionally high (4572.59 and 59.10), but this comes at the cost of extreme data loss, as depicted by the highly distorted or gray images.
Increasing the grid size from 2.5 to 4.5 results in more clusters (81 to 256), which improves the image's visual quality. The SSIM steadily increases, reaching 0.956 at a grid size of 4.5, indicating a good retention of structural similarity compared to the original image. Correspondingly, the CR values drop significantly (32.84 to 22.15), reflecting a more balanced trade-off between compression and quality. The images become visually more acceptable as the grid size increases, with better preservation of object edges and colors.
At grid sizes 5.0 to 6.0, the number of clusters increases drastically (625 and 1296), resulting in improved image quality. The SSIM values rise further (0.972 to 0.981), indicating near-perfect structural similarity. The BPP also increases moderately (1.38 to 1.65), demonstrating a slight trade-off in compression efficiency. The images exhibit finer details, and color fidelity is well-preserved, making these grid sizes suitable for high-quality compression scenarios.
As the grid size increases from 6.5 to 8.5, the number of clusters grows exponentially (2401 to 4096). The SSIM approaches near-perfection (0.986 to 0.989), and the BPP increases significantly (1.92 to 2.04). These results reflect excellent image reconstruction quality with minimal perceptual differences from the original image. However, the CR values continue to decrease (12.53 to 11.74), highlighting the trade-off between compression efficiency and quality. These grid sizes are ideal for applications requiring minimal quality loss, even at the expense of reduced compression efficiency.
The performance of the CLIQUE method is highly dependent on the grid size, with a direct relationship between grid size and the number of clusters. Lower grid sizes result in fewer clusters, leading to higher compression ratios but significantly compromised image quality, as evidenced by low SSIM values and poor visual results. Medium grid sizes, such as 4.5 to 6.0, strike a balance between compression efficiency and image quality, maintaining good structural integrity while offering reasonable compression ratios. On the other hand, higher grid sizes (e.g., 6.5 to 8.5) generate more clusters, yielding near-perfect SSIM values and visually indistinguishable images from the original but at the cost of reduced compression efficiency.
6.8. Discussion
The evaluation of the nine clustering techniques highlights the diverse strengths and limitations of each method in the context of image compression. Each technique offers unique trade-offs between compression efficiency, image quality, and computational complexity, making them suitable for different applications depending on the specific requirements.
K-Means stands out as a robust and versatile method for image compression, demonstrating a good balance between compression efficiency and image quality across various block sizes and cluster configurations. Its ability to produce consistent results with high SSIM values and moderate compression ratios makes it a strong candidate for applications requiring both visual fidelity and reasonable storage savings. However, its performance diminishes slightly with larger block sizes, where fine-grained image details are lost, leading to visible artifacts.
BIRCH, on the other hand, struggles to balance compression and quality, particularly with larger block sizes and higher thresholds. Its tendency to lose structural similarity at higher parameter settings indicates its limitations in preserving critical image features. While BIRCH may excel in other data clustering contexts, its application in image compression appears less effective compared to other techniques.
Divisive Clustering showcases excellent adaptability, particularly with smaller block sizes, where it maintains high SSIM values and reasonable compression ratios. As the block size increases, it achieves impressive compression efficiency with only a slight compromise in image quality. Its hierarchical nature enables it to provide granular control over the clustering process, making it well-suited for scenarios requiring a balance between compression and quality.
Density-based methods like DBSCAN and OPTICS highlight the challenges of applying these techniques to image compression. DBSCAN's performance varies significantly with its parameters (eps and min_samples), often producing high SSIM values at the cost of computational overhead and impractical cluster counts. OPTICS, while theoretically advantageous for handling varying densities, shows limited effectiveness in this application, often leading to excessive compression at the expense of image structure. Both methods illustrate the importance of parameter tuning and the potential challenges of adapting density-based clustering for image compression.
Mean Shift emerges as a stable technique, particularly for smaller block sizes and lower bandwidth settings. Its non-parametric nature allows it to adapt well to the data, resulting in high SSIM values and moderate compression ratios. However, as block sizes increase, the sensitivity of Mean Shift to its bandwidth parameter diminishes, leading to less pronounced variations in results. This stability makes it an attractive option for applications where consistency across different settings is desirable.
GMM and BGMM provide complementary perspectives on probabilistic clustering for image compression. GMM demonstrates more pronounced changes in performance across block sizes and cluster counts, offering high compression ratios but at the cost of noticeable quality degradation for larger block sizes. In contrast, BGMM delivers more consistent image quality with slightly higher BPP, making it a reliable choice for scenarios prioritizing visual fidelity over extreme compression efficiency.
Finally, CLIQUE, a grid-based clustering method, demonstrates the importance of balancing grid size with block size to achieve optimal results. While smaller grid sizes lead to significant compression, they often produce highly distorted images. Medium grid sizes strike a balance, maintaining reasonable compression ratios and good image quality, whereas larger grid sizes yield near-perfect SSIM values at the expense of reduced compression efficiency. CLIQUE's grid-based approach offers a unique perspective, emphasizing the interplay between spatial granularity and compression performance.
In summary, the comparative analysis of these techniques underscores the necessity of selecting a clustering method tailored to the specific requirements of the application. Techniques like K-Means, Divisive Clustering, and BGMM excel in maintaining a balance between compression efficiency and image quality, making them suitable for general-purpose applications. Methods such as CLIQUE and Mean Shift provide specialized advantages, particularly when specific parameter configurations are carefully tuned. On the other hand, techniques like DBSCAN and OPTICS highlight the challenges of adapting density-based clustering to this domain, while BIRCH's limitations in this context emphasize the importance of evaluating clustering methods in their intended use cases.
7. Validation of Compression Results Using CID22 Benchmark Dataset
The CID22 dataset [53] is a diverse collection of high-quality images specifically designed for evaluating image compression and other computer vision algorithms. It offers a wide range of visual content, including dynamic action scenes, intricate textures, vibrant colors, and varying levels of detail, making it an ideal choice for robust validation.
For this study, eight representative images were selected, as shown in Figure 23, covering diverse categories such as sports, mechanical objects, food, landscapes, macro photography, artwork, and natural phenomena like cloud formations. This selection ensures comprehensive testing across different types of visual data, capturing various challenges like high-frequency details, smooth gradients, and complex patterns. The dataset's diversity allows for a thorough assessment of the clustering-based compression techniques, providing insights into their performance across real-world scenarios.
Figure 24 and Table 4 show the results of compressing the benchmark images using the nine clustering techniques. K-Means consistently delivers a balanced performance across all image categories. For instance, in sports and vehicles, it achieves high CR values (22.20 and 27.05, respectively) while maintaining excellent SSIM values (0.993 and 0.994). This indicates its effectiveness in preserving structural details while achieving reasonable compression. However, for more intricate scenes such as macro photography, the CR increases to 30.58, suggesting its adaptability for detailed data. Overall, K-Means achieves a good balance between compression efficiency and image quality, making it versatile for a variety of image types.
BIRCH exhibits low performance in both CR and SSIM across all image types. For example, in food photography and macro photography, it achieves SSIM values of -0.004 and -0.032, respectively, with CR values of 1.67 and 3.39. These results indicate significant quality loss and inefficiency in compression. The method struggles to adapt to the complexities of natural scenes or high-detail photography. BIRCH's weak performance suggests it may not be suitable for image compression tasks where quality retention is critical.
Divisive Clustering achieves high CR and SSIM values across most categories, particularly in sports and vehicles, with CR values of 23.45 and 28.34 and SSIM values of 0.993 and 0.994, respectively. These results show that the method preserves image quality effectively while achieving efficient compression. For macro photography, it performs similarly well, achieving an SSIM of 0.996. Divisive Clustering emerges as one of the top-performing techniques, maintaining a balance between efficiency and visual quality.
DBSCAN's performance is highly dependent on parameter settings and image content. It achieves perfect SSIM values (1.0) for several categories, such as food photography and vehicles, but at the cost of extremely low CR values (e.g., 2.77 for macro photography). This indicates over-segmentation, leading to inefficiencies in practical compression. In outdoor scenes and artwork, the method shows reduced CR values but still retains high SSIM, demonstrating its adaptability for specific types of data. However, its tendency to overfit or underperform depending on parameter tuning makes it less reliable overall.
OPTICS performs poorly in terms of compression efficiency and image quality. For most categories, such as sports and food photography, it achieves very high CR values (266.06 and 154.21) but with significantly degraded SSIM values (-0.113 and 0.530). The images reconstructed using OPTICS often exhibit severe distortions and fail to retain meaningful structural details. The method's performance suggests it is not well-suited for image compression tasks where preserving visual quality is important.
Mean Shift shows significant limitations in terms of compression efficiency. Despite achieving perfect SSIM values (1.0) across several categories (e.g., sports, food photography, and vehicles), its CR values are consistently low (e.g., 1.50 to 2.91). This indicates poor compression efficiency, making Mean Shift unsuitable for practical image compression tasks where achieving a high CR is essential. While it preserves image quality well, its limited efficiency renders it a less favorable choice for real-world applications.
GMM achieves a strong balance between compression and quality, particularly in vehicles and sports, with CR values of 24.44 and 21.02 and SSIM values of 0.978 and 0.941, respectively. However, it struggles slightly with macro photography, where SSIM drops to 0.933. While GMM performs well overall, its performance is slightly less consistent compared to Divisive Clustering or K-Means. Nonetheless, it remains a strong option for applications requiring good compression and quality balance.
BGMM exhibits stable performance across all categories, retaining higher SSIM values than GMM in most cases. For instance, in vehicles and macro photography, BGMM achieves SSIM values of 0.928 and 0.921, respectively. The CR values are also competitive, with a maximum of 25.33 in sports. However, BGMM tends to have slightly higher BPP compared to GMM, which may limit its efficiency for applications requiring aggressive compression. Its probabilistic nature ensures stable and reliable results across diverse image types.
CLIQUE emerges as a good performing method, combining high compression efficiency with excellent quality retention. In sports and vehicles, it achieves CR values of 14.39 and 14.40 and SSIM values of 0.992. In macro photography, it maintains a strong balance, achieving an SSIM of 0.963 while maintaining a reasonable CR of 29.29. CLIQUE adapts well to a wide range of image complexities and demonstrates consistent performance, making it a strong competitor to K-Means and Divisive Clustering.
In summary, K-Means, Divisive Clustering, and CLIQUE stand out as the most reliable methods for image compression, offering consistent performance across diverse image types. These methods effectively balance compression efficiency (high CR) and image quality (high SSIM), making them suitable for a wide range of applications. GMM and BGMM also provide good results but may require careful parameter tuning to achieve optimal performance. Mean Shift, despite its ability to retain image quality, is limited by poor compression efficiency, making it unsuitable for most compression scenarios. BIRCH, DBSCAN, and OPTICS exhibit significant limitations in either quality retention or compression efficiency, rendering them less favorable for practical applications.
Image compression is a crucial aspect of digital media management, enabling efficient storage, transmission, and accessibility of large-scale image data. With the growing demand for high-quality visual content in applications ranging from healthcare to entertainment, the development of effective compression methods is more important than ever. Clustering techniques offer a promising approach to image compression by grouping pixel data based on similarity, allowing for reduced storage requirements while maintaining structural fidelity. In this paper, we systematically evaluated nine clustering techniques—K-Means, BIRCH, Divisive Clustering, DBSCAN, OPTICS, Mean Shift, GMM, BGMM, and CLIQUE—for their performance in compressing images.
The findings highlight the versatility and efficacy of clustering-based approaches, with K-Means, Divisive Clustering, and CLIQUE emerging as the most reliable methods. K-Means demonstrated exceptional adaptability, balancing compression efficiency and image quality, making it a go-to technique for various image types and complexities. Divisive Clustering, with its hierarchical methodology, proved adept at preserving structural integrity while achieving substantial compression, particularly for larger block sizes. CLIQUE, leveraging its grid-based strategy, offered a unique combination of high CR and SSIM values, placing it as a strong contender alongside K-Means and Divisive Clustering. While GMM and BGMM were effective in retaining structural details, their compression efficiency was slightly lower than the top-performing techniques. Mean Shift preserved image quality but suffered from low CR, limiting its practicality. Techniques like BIRCH, DBSCAN, and OPTICS struggled to balance compression and quality, often yielding distorted images or suboptimal CR values.
Building on the findings of this paper, future research can explore several avenues to further enhance clustering-based image compression. One promising direction is the development of hybrid clustering techniques that integrate the strengths of multiple methods. For example, combining the adaptability of K-Means with the density-awareness of CLIQUE or DBSCAN could produce more robust algorithms capable of balancing compression efficiency and quality effectively. Another promising area is the application of clustering-based techniques to video compression, where temporal consistency between frames adds complexity and opportunity. Developing approaches that exploit temporal redundancies could significantly enhance compression performance.
Author Contributions
Conceptualization, M.O.; methodology, M.O. and K.M.; software, M.O.; validation, M.O., and M.K.; formal analysis, M.O.; investigation, M.O, and M.K.; resources, K.S. and A.A; data curation, M.O. and M. K.; writing—original draft preparation, M.O.; writing—review and editing, K.M., K.S., and A.A.; visualization, M.O.; supervision, M.O.; project administration, M.O.; funding acquisition, M.O., K.S. and A.A. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by The American University of Ras Al Khaimah, grant number ENGR/001/25.
Institutional Review Board Statement
Not applicable.
Data Availability Statement
Data will be available upon request.
Acknowledgments
The authors would like to express their gratitude to ChatGPT by OpenAI for its invaluable assistance in the preparation of this paper. Its support in drafting, refining, and structuring the content has significantly contributed to the clarity and quality of this work.
Conflicts of Interest
The authors declare no conflicts of interest.
Abbreviations
The following abbreviations are used in this manuscript
| BIRCH | Balanced Iterative Reducing and Clustering using Hierarchies |
| DBSCAN | Density-Based Spatial Clustering of Applications with Noise |
| OPTICS | Ordering Points to Identify the Clustering Structure |
| GMM | Gaussian Mixture Models |
| BGMM | Bayesian Gaussian Mixture Models |
| CLIQUE | Clustering In Quest |
| SSIM | Structural Similarity Index |
| CR | Compression Ratio |
| CF | Clustering Feature |
| Eps | Epsilon |
| Min_Pts | Minimum Points |
| BPP | Bits Per Pixel |
References
- Kou, Weidong. Digital image compression: algorithms and standards. Vol. 333. Springer Science & Business Media, 2013; pp 1-15.
- Vincze, Miklos, Bela Molnar, and Miklos Kozlovszky. "Real-Time Network Video Data Streaming in Digital Medicine." Computers 12, no. 11 (2023): 234. [CrossRef]
- Mochurad, Lesia. "A Comparison of Machine Learning-Based and Conventional Technologies for Video Compression." Technologies 12, no. 4 (2024): 52. [CrossRef]
- Auli-Llinas, Francesc. "Fast and Efficient Entropy Coding Architectures for Massive Data Compression." Technologies 11, no. 5 (2023): 132. [CrossRef]
- Frackiewicz, Mariusz, Aron Mandrella, and Henryk Palus. "Fast color quantization by K-means clustering combined with image sampling." Symmetry 11, no. 8 (2019): 963. [CrossRef]
- Báscones, Daniel, Carlos González, and Daniel Mozos. "Hyperspectral image compression using vector quantization, PCA and JPEG2000." Remote sensing 10, no. 6 (2018): 907.
- Guerra, Raúl, Yubal Barrios, María Díaz, Lucana Santos, Sebastián López, and Roberto Sarmiento. "A new algorithm for the on-board compression of hyperspectral images." Remote Sensing 10, no. 3 (2018): 428. [CrossRef]
- Ungureanu, Vlad-Ilie, Paul Negirla, and Adrian Korodi. "Image-Compression Techniques: Classical and “Region-of-Interest-Based” Approaches Presented in Recent Papers." Sensors 24, no. 3 (2024): 791. [CrossRef]
- Uthayakumar, J., Mohamed Elhoseny, and K. Shankar. "Highly reliable and low-complexity image compression scheme using neighborhood correlation sequence algorithm in WSN." IEEE Transactions on Reliability 69, no. 4 (2020): 1398-1423. [CrossRef]
- Khalaf, Walaa, Dhafer Zaghar, and Noor Hashim. "Enhancement of curve-fitting image compression using hyperbolic function." Symmetry 11, no. 2 (2019): 291. [CrossRef]
- Fernandes, Vítor, Gonçalo Carvalho, Vasco Pereira, and Jorge Bernardino. "Analyzing Data Reduction Techniques: An Experimental Perspective." Applied Sciences 14, no. 8 (2024): 3436. [CrossRef]
- Hoeltgen, Laurent, Pascal Peter, and Michael Breuß. "Clustering-based quantisation for PDE-based image compression." Signal, Image and Video Processing 12 (2018): 411-419. [CrossRef]
- Mbuga, Felix, and Cristina Tortora. "Spectral clustering of mixed-type data." Stats 5, no. 1 (2021): 1-11. [CrossRef]
- Nies, Hui Wen, Zalmiyah Zakaria, Mohd Saberi Mohamad, Weng Howe Chan, Nazar Zaki, Richard O. Sinnott, Suhaimi Napis, Pablo Chamoso, Sigeru Omatu, and Juan Manuel Corchado. "A review of computational methods for clustering genes with similar biological functions." Processes 7, no. 9 (2019): 550. [CrossRef]
- Ahmed, Mohiuddin, Raihan Seraj, and Syed Mohammed Shamsul Islam. "The k-means algorithm: A comprehensive survey and performance evaluation." Electronics 9, no. 8 (2020): 1295. [CrossRef]
- Oujezsky, Vaclav, and Tomas Horvath. "Traffic similarity observation using a genetic algorithm and clustering." Technologies 6, no. 4 (2018): 103. [CrossRef]
- Steinley, Douglas. "K-means clustering: a half-century synthesis." British Journal of Mathematical and Statistical Psychology 59, no. 1 (2006): 1-34.
- Hill, Mark O., Colin A. Harrower, and Christopher D. Preston. "Spherical k-means clustering is good for interpreting multivariate species occurrence data." Methods in Ecology and Evolution 4, no. 6 (2013): 542-551. [CrossRef]
- Celebi, M. Emre, Hassan A. Kingravi, and Patricio A. Vela. "A comparative study of efficient initialization methods for the k-means clustering algorithm." Expert systems with applications 40, no. 1 (2013): 200-210. [CrossRef]
- Wu, Junjie, and Junjie Wu. "Cluster analysis and K-means clustering: an introduction." Advances in K-Means clustering: A data mining thinking (2012): 1-16.
- Zhang, Tian, Raghu Ramakrishnan, and Miron Livny. "BIRCH: an efficient data clustering method for very large databases." ACM sigmod record 25, no. 2 (1996): 103-114.
- Zhang, Tian, Raghu Ramakrishnan, and Miron Livny. "BIRCH: A new data clustering algorithm and its applications." Data mining and knowledge discovery 1 (1997): 141-182. [CrossRef]
- Lang, Andreas, and Erich Schubert. "BETULA: Fast clustering of large data with improved BIRCH CF-Trees." Information Systems 108 (2022): 101918. [CrossRef]
- Lorbeer, Boris, Ana Kosareva, Bersant Deva, Dženan Softić, Peter Ruppel, and Axel Küpper. "Variations on the clustering algorithm BIRCH." Big data research 11 (2018): 44-53. [CrossRef]
- Shetty, Pranav, and Suraj Singh. "Hierarchical clustering: a survey." International Journal of Applied Research 7, no. 4 (2021): 178-181.
- Savaresi, Sergio M., Daniel L. Boley, Sergio Bittanti, and Giovanna Gazzaniga. "Cluster selection in divisive clustering algorithms." In Proceedings of the 2002 SIAM International Conference on Data Mining, pp. 299-314. Society for Industrial and Applied Mathematics, 2002.
- Tasoulis, S. K., and D. K. Tasoulis. "Improving principal direction divisive clustering." In 14th ACM SIGKDD International Conference on Knowledge Discovery and Data Mining (KDD 2008), Workshop on Data Mining using Matrices and Tensors, Las Vegas, USA. 2008.
- Bhattacharjee, Panthadeep, and Pinaki Mitra. "A survey of density based clustering algorithms." Frontiers of Computer Science 15 (2021): 1-27. [CrossRef]
- Ester, Martin, Hans-Peter Kriegel, Jörg Sander, and Xiaowei Xu. "A density-based algorithm for discovering clusters in large spatial databases with noise." In kdd, vol. 96, no. 34, pp. 226-231. 1996.
- Khan, Kamran, Saif Ur Rehman, Kamran Aziz, Simon Fong, and Sababady Sarasvady. "DBSCAN: Past, present and future." In The fifth international conference on the applications of digital information and web technologies (ICADIWT 2014), pp. 232-238. IEEE, 2014.
- Choi, Changlock, and Seong-Yun Hong. "MDST-DBSCAN: A density-based clustering method for multidimensional spatiotemporal data." ISPRS International Journal of Geo-Information 10, no. 6 (2021): 391. [CrossRef]
- Monalisa, Siti, and Fitra Kurnia. "Analysis of DBSCAN and K-means algorithm for evaluating outlier on RFM model of customer behaviour." Telkomnika (Telecommunication Computing Electronics and Control) 17, no. 1 (2019): 110-117. [CrossRef]
- Ankerst, Mihael, Markus M. Breunig, Hans-Peter Kriegel, and Jörg Sander. "OPTICS: Ordering points to identify the clustering structure." ACM Sigmod record 28, no. 2 (1999): 49-60.
- Kanagala, Hari Krishna, and VV Jaya Rama Krishnaiah. "A comparative study of K-Means, DBSCAN and OPTICS." In 2016 International Conference on Computer Communication and Informatics (ICCCI), pp. 1-6. IEEE, 2016.
- Reitz, Paul, Sören R. Zorn, Stefan H. Trimborn, and Achim M. Trimborn. "A new, powerful technique to analyze single particle aerosol mass spectra using a combination of OPTICS and the fuzzy c-means algorithm." Journal of Aerosol Science 98 (2016): 1-14. [CrossRef]
- Al Samara, Mustafa, Ismail Bennis, Abdelhafid Abouaissa, and Pascal Lorenz. "Complete outlier detection and classification framework for WSNs based on OPTICS." Journal of Network and Computer Applications 211 (2023): 103563.
- Cheng, Yizong. "Mean shift, mode seeking, and clustering." IEEE transactions on pattern analysis and machine intelligence 17, no. 8 (1995): 790-799.
- Georgescu, Shimshoni, and Meer. "Mean shift based clustering in high dimensions: A texture classification example." In Proceedings Ninth IEEE International Conference on Computer Vision, pp. 456-463. IEEE, 2003.
- Ozertem, Umut, Deniz Erdogmus, and Robert Jenssen. "Mean shift spectral clustering." Pattern Recognition 41, no. 6 (2008): 1924-1938. [CrossRef]
- Yu, Zhiwen, Xianjun Zhu, Hau-San Wong, Jane You, Jun Zhang, and Guoqiang Han. "Distribution-based cluster structure selection." IEEE transactions on cybernetics 47, no. 11 (2016): 3554-3567. [CrossRef]
- Adams, Stephen, and Peter A. Beling. "A survey of feature selection methods for Gaussian mixture models and hidden Markov models." Artificial Intelligence Review 52 (2019): 1739-1779. [CrossRef]
- Patel, Eva, and Dharmender Singh Kushwaha. "Clustering cloud workloads: K-means vs gaussian mixture model." Procedia computer science 171 (2020): 158-167. [CrossRef]
- Su, Ting, and Jennifer G. Dy. "In search of deterministic methods for initializing K-means and Gaussian mixture clustering." Intelligent Data Analysis 11, no. 4 (2007): 319-338. [CrossRef]
- Mirzal, Andri. "Statistical analysis of microarray data clustering using NMF, spectral clustering, Kmeans, and GMM." IEEE/ACM Transactions on Computational Biology and Bioinformatics 19, no. 2 (2020): 1173-1192.
- Ganesan, Anusha, Anand Paul, and Sungho Kim. "Enhanced Bayesian Gaussian hidden Markov mixture clustering for improved knowledge discovery." Pattern Analysis and Applications 27, no. 4 (2024): 154. [CrossRef]
- Kita, Francis John, Srinivasa Rao Gaddes, and Peter Josephat Kirigiti. "Enhancing Cluster Accuracy in Diabetes Multimorbidity with Dirichlet Process Mixture Models." IEEE Access (2024). [CrossRef]
- Pezoulas, Vasileios C., Grigorios I. Grigoriadis, Nikolaos S. Tachos, Fausto Barlocco, Iacopo Olivotto, and Dimitrios I. Fotiadis. "Variational Gaussian Mixture Models with robust Dirichlet concentration priors for virtual population generation in hypertrophic cardiomyopathy: a comparison study." In 2021 43rd Annual International Conference of the IEEE Engineering in Medicine & Biology Society (EMBC), pp. 1674-1677. IEEE, 2021.
- Economou, Polychronis. "A clustering algorithm for overlapping Gaussian mixtures." Research in Statistics 1, no. 1 (2023): 2242337. [CrossRef]
- Cheng, Wei, Wei Wang, and Sandra Batista. "Grid-based clustering." In Data clustering, pp. 128-148. Chapman and Hall/CRC, 2018.
- Du, Mingjing, and Fuyu Wu. "Grid-based clustering using boundary detection." Entropy 24, no. 11 (2022): 1606. [CrossRef]
- Rani, Pinki. "A Survey on STING and CLIQUE Grid Based Clustering Methods." International Journal of Advanced Research in Computer Science 8, no. 5 (2017), pp. 1510-1512.
- Test image repository, Available: https://links.uwaterloo.ca/Repository.html.
- Test image repository, Available: https://cloudinary.com/labs/cid22.
Figure 1.
Legend illustrating cluster assignments, centroids, noisy data points, and unclustered points for clustering visualizations.
Figure 1.
Legend illustrating cluster assignments, centroids, noisy data points, and unclustered points for clustering visualizations.
Figure 2.
Visualization of clustering results on a complex dataset using K-Means.
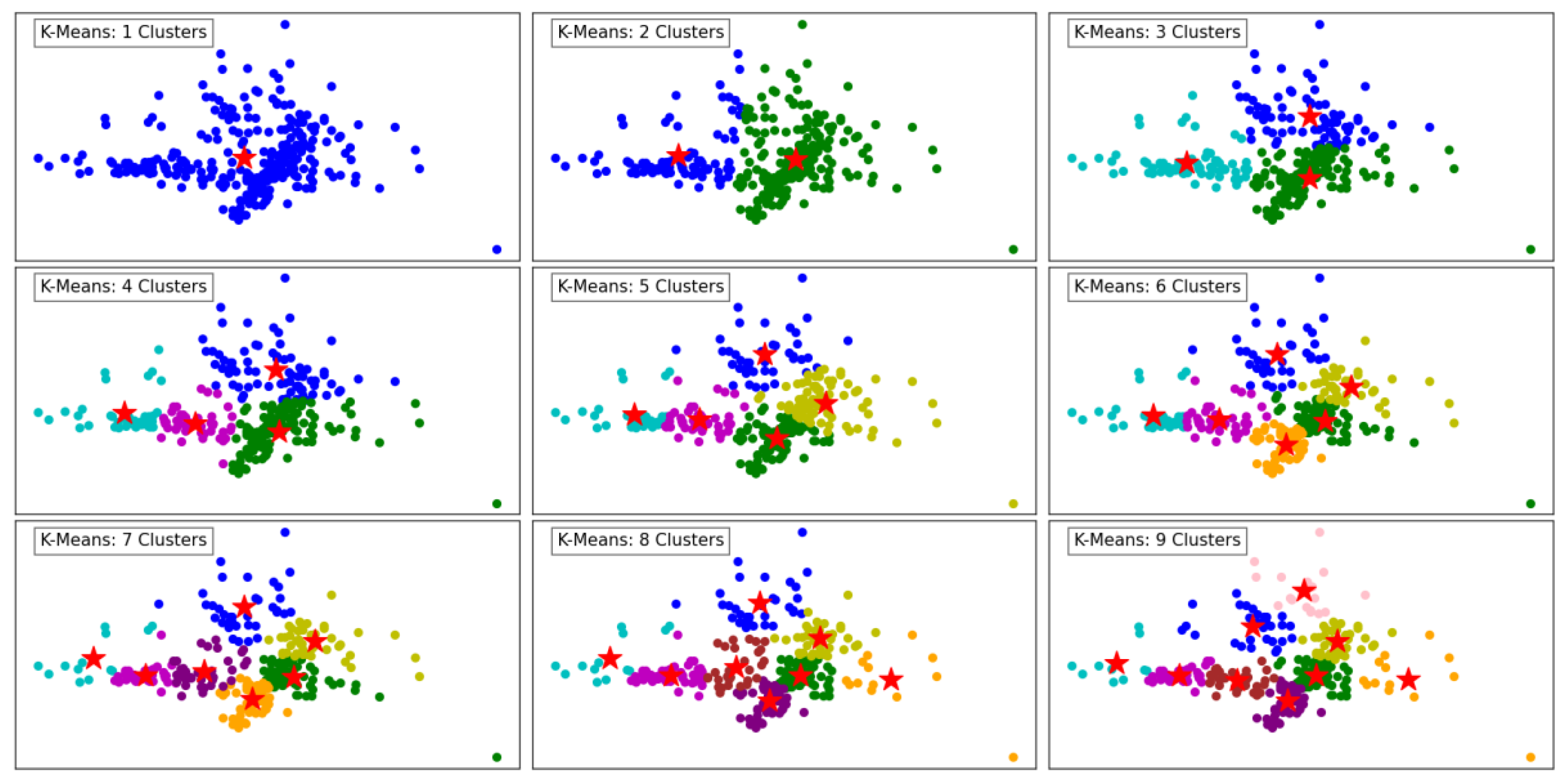
Figure 3.
Visualization of clustering results on a complex dataset using BIRCH.
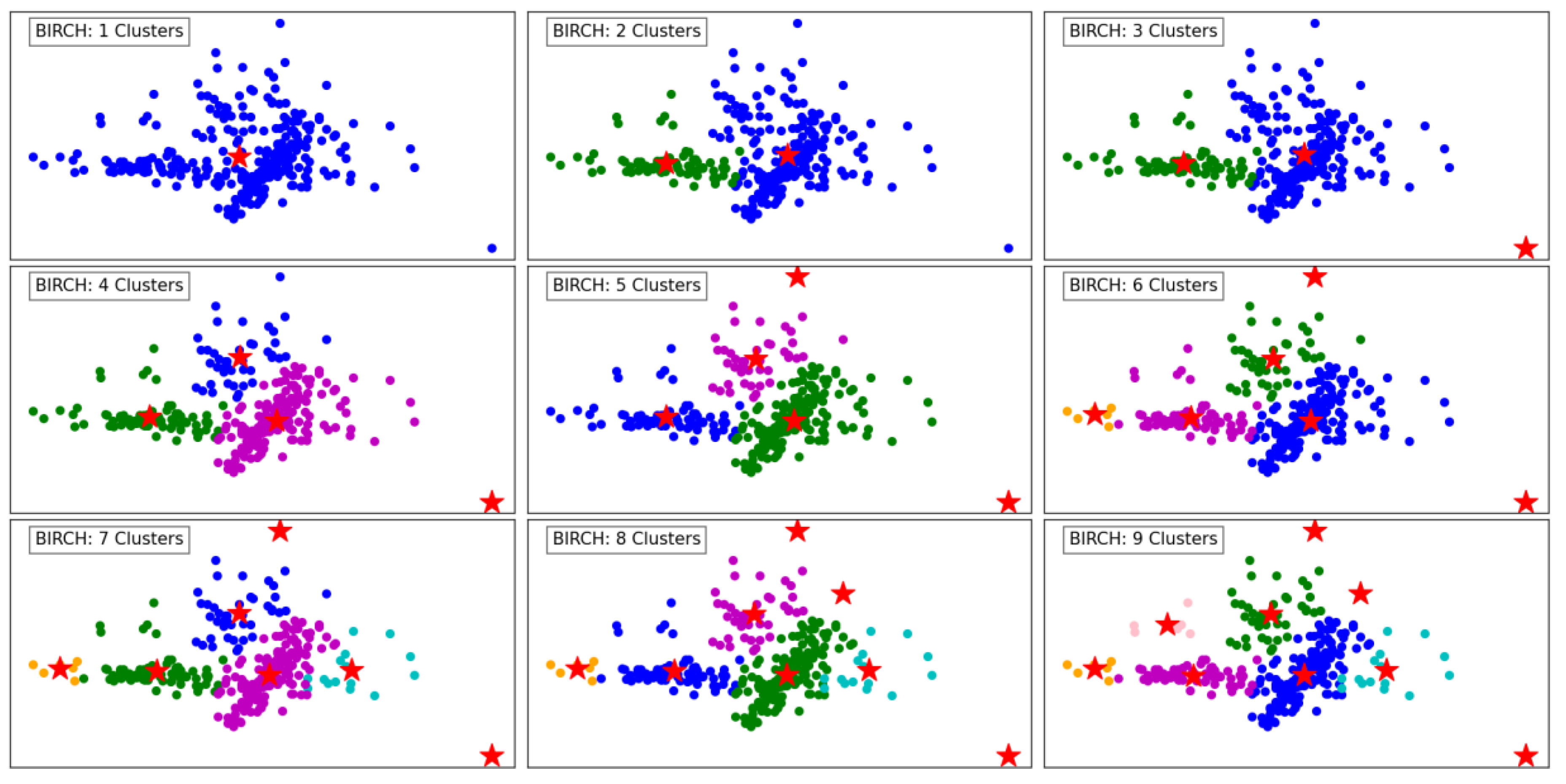
Figure 4.
Visualization of clustering results on a complex dataset using Divisive Clustering.
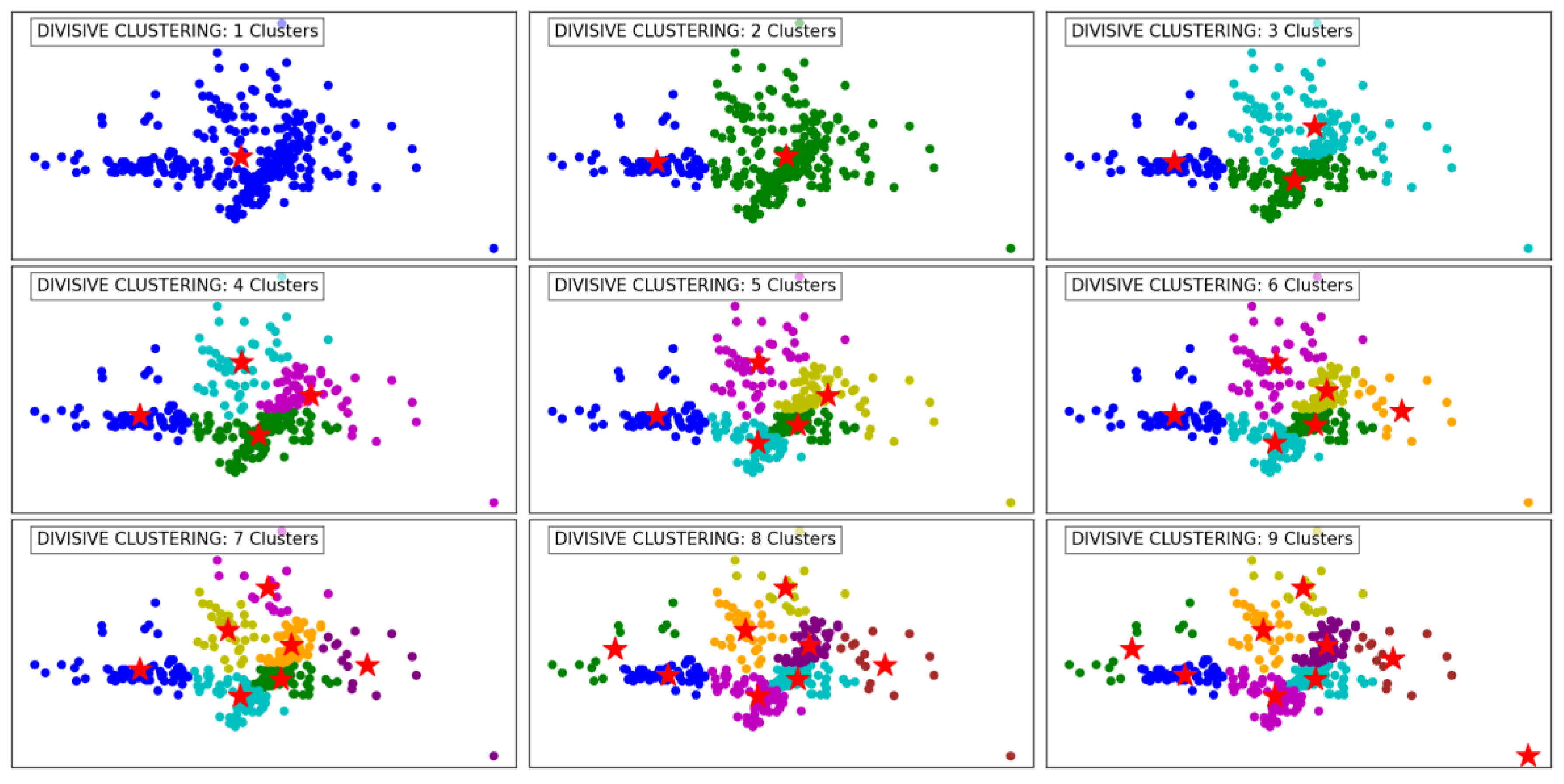
Figure 5.
Visualization of clustering results on a complex dataset using DBSCAN.
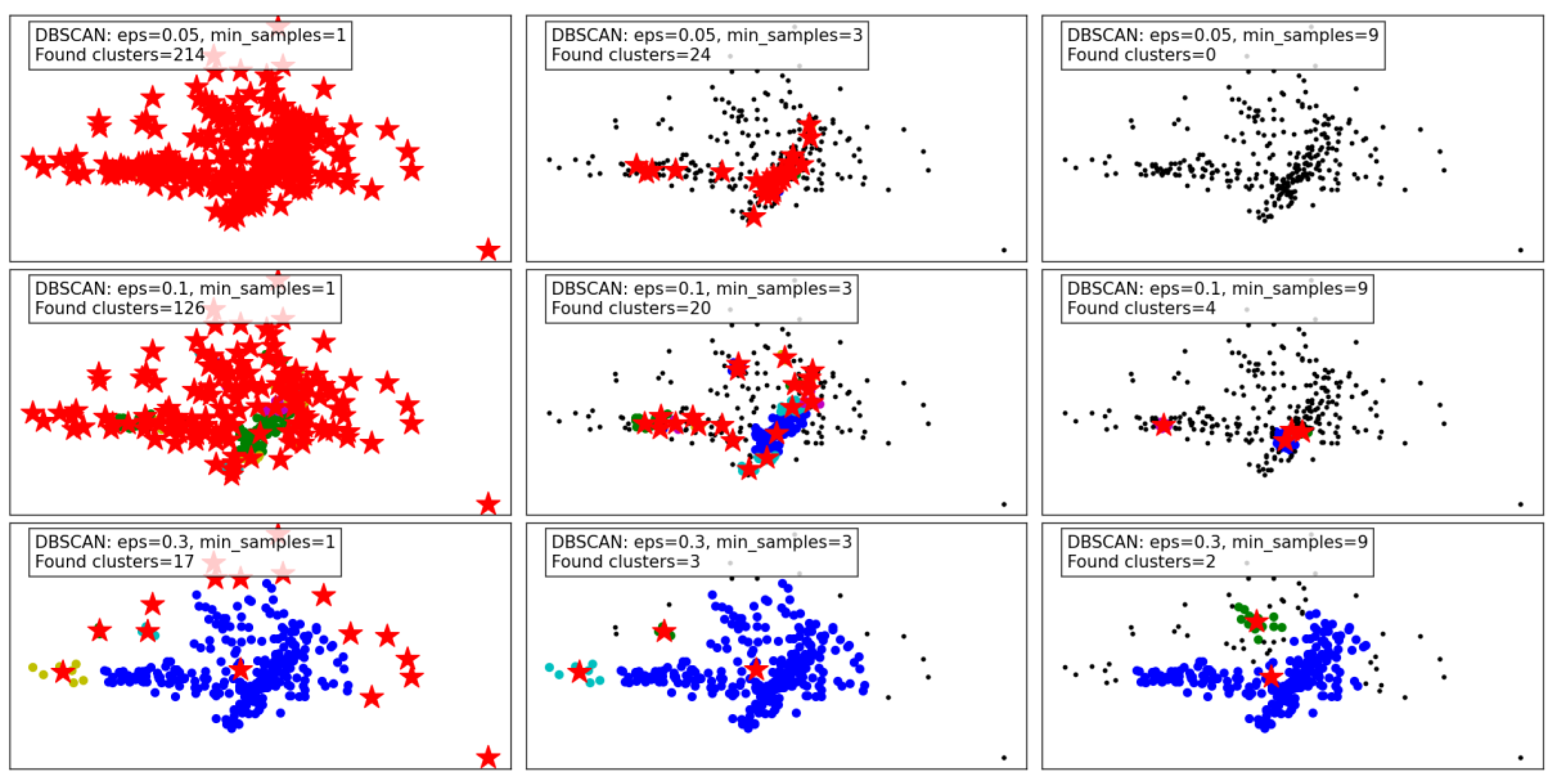
Figure 6.
Visualization of clustering results on a complex dataset using OPTICS.
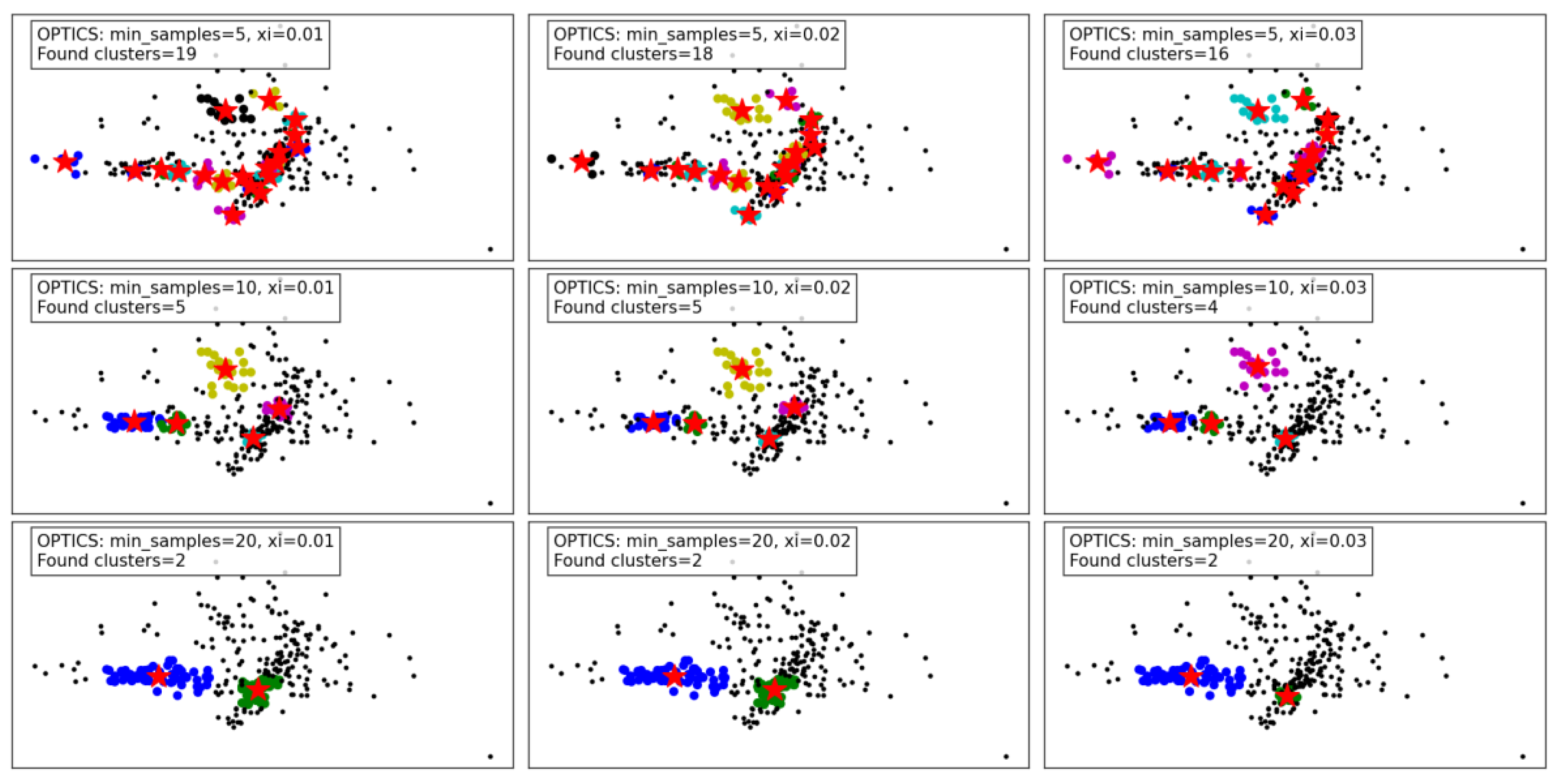
Figure 7.
Visualization of clustering results on a complex dataset using Mean-Shift.

Figure 8.
Visualization of clustering results on a complex dataset using GMM.
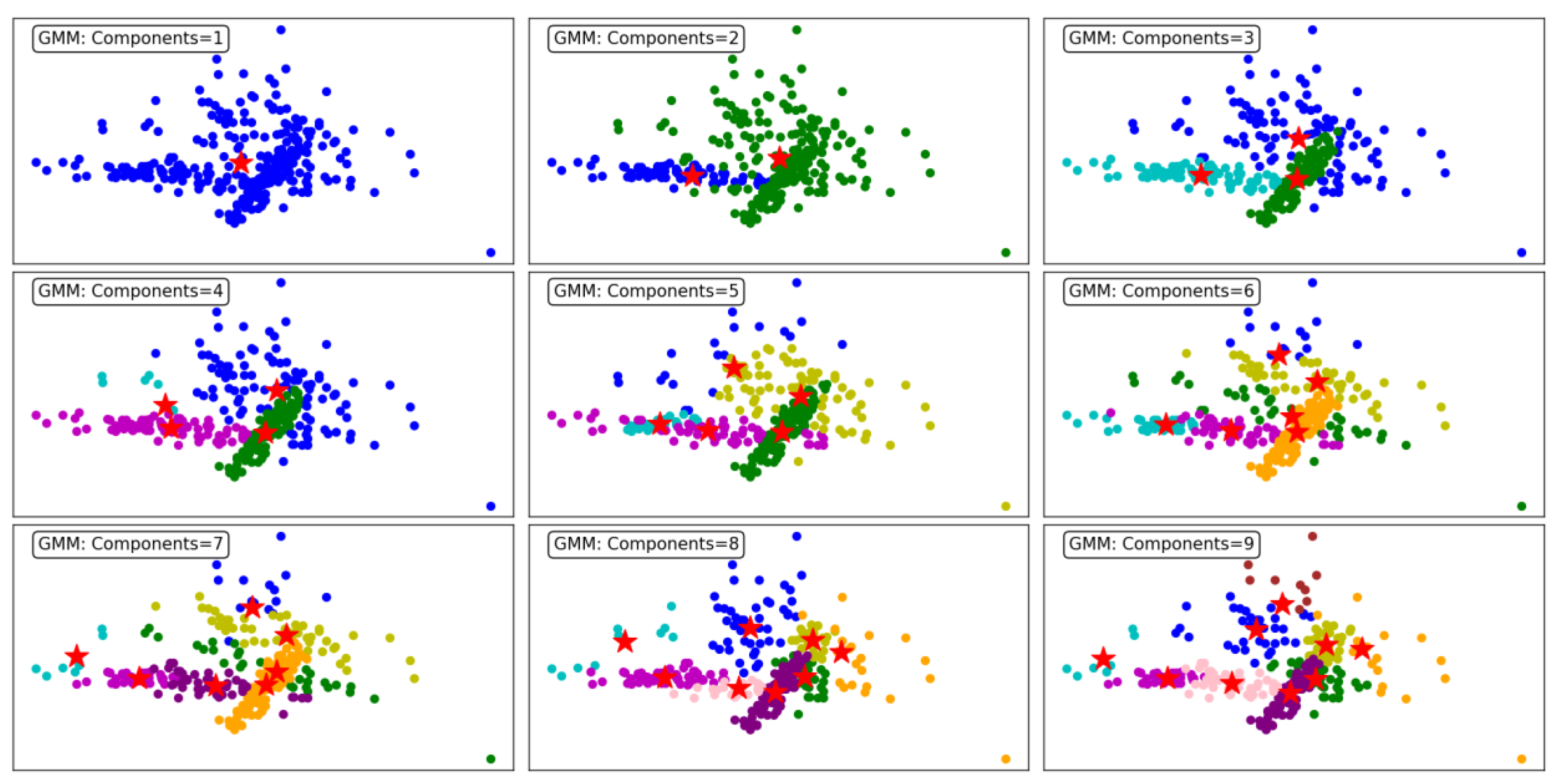
Figure 9.
Visualization of clustering results on a complex dataset using BGMM.
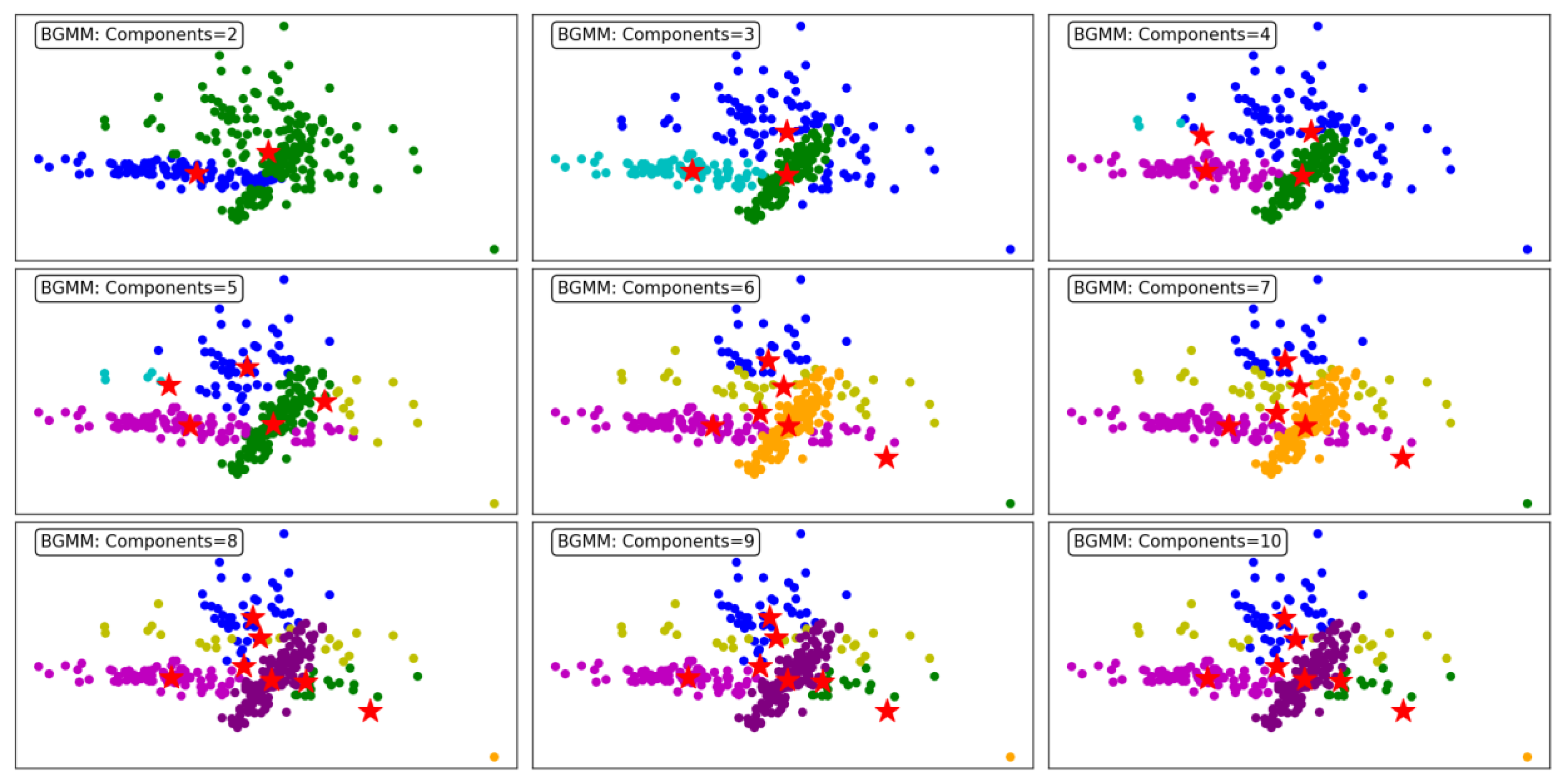
Figure 10.
Visualization of clustering results on a complex dataset using CLIQUE.
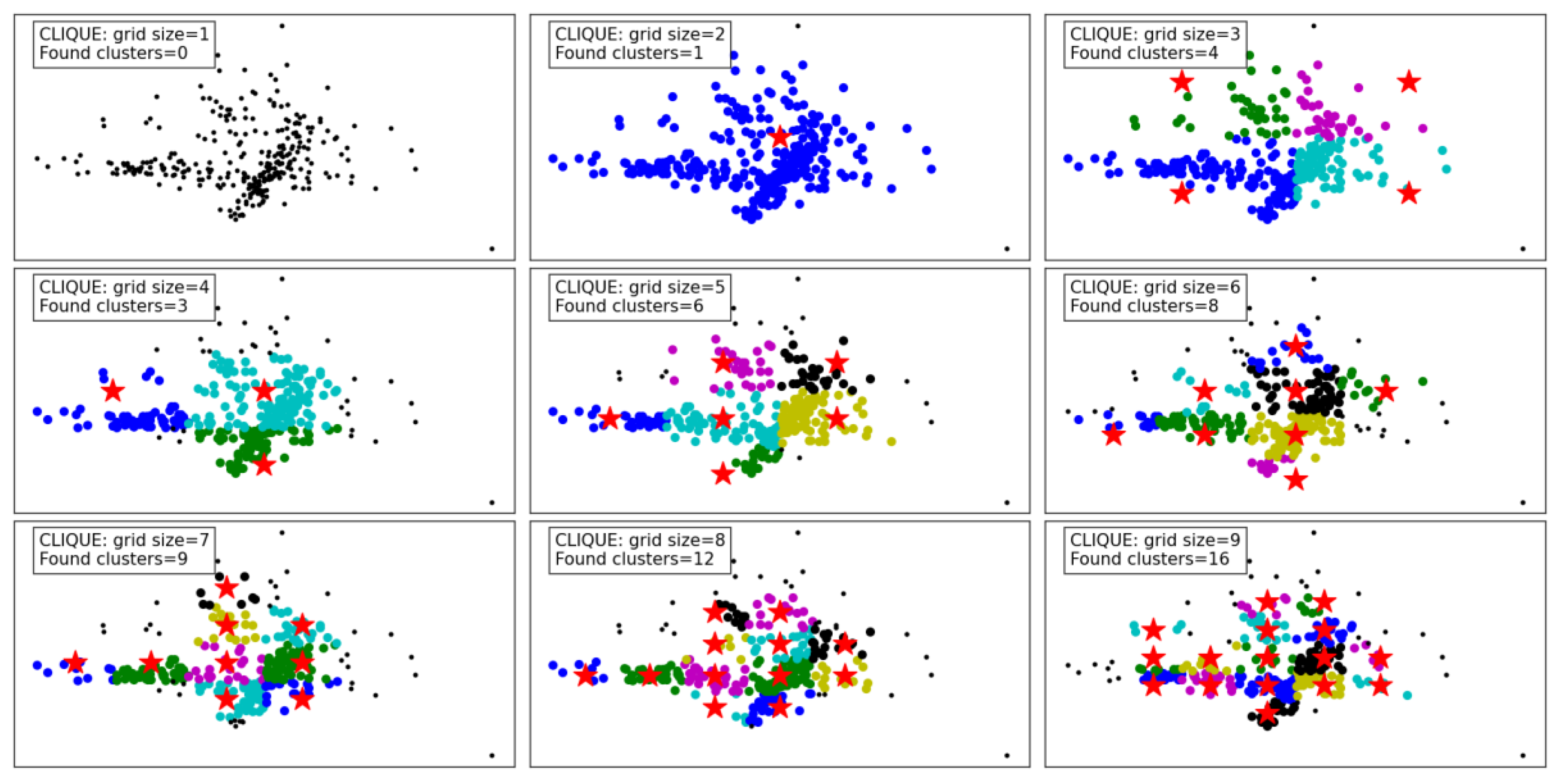
Figure 11.
Image compression using clustering techniques.
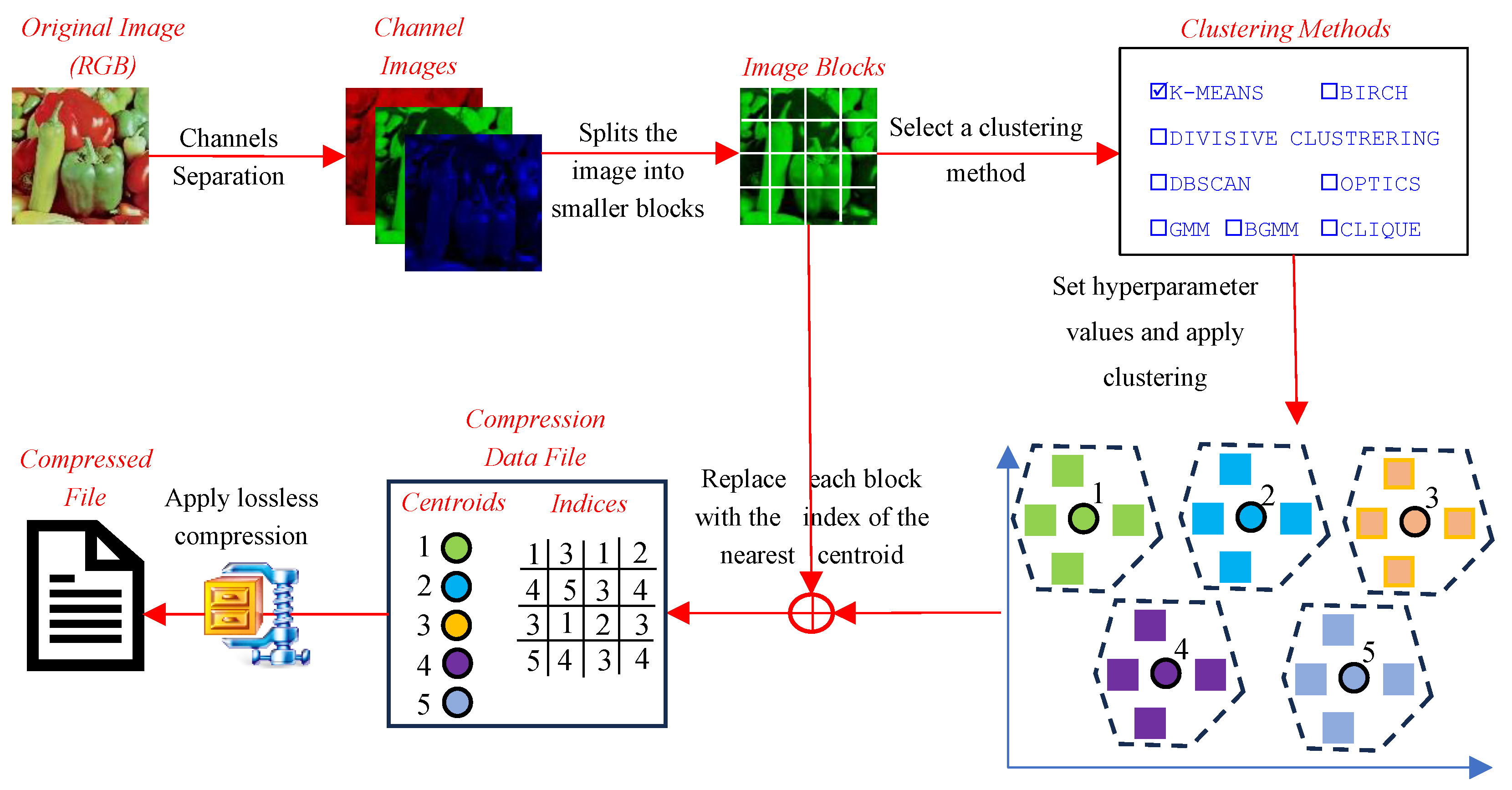
Figure 12.
Image decompression using centroids of clustering techniques.
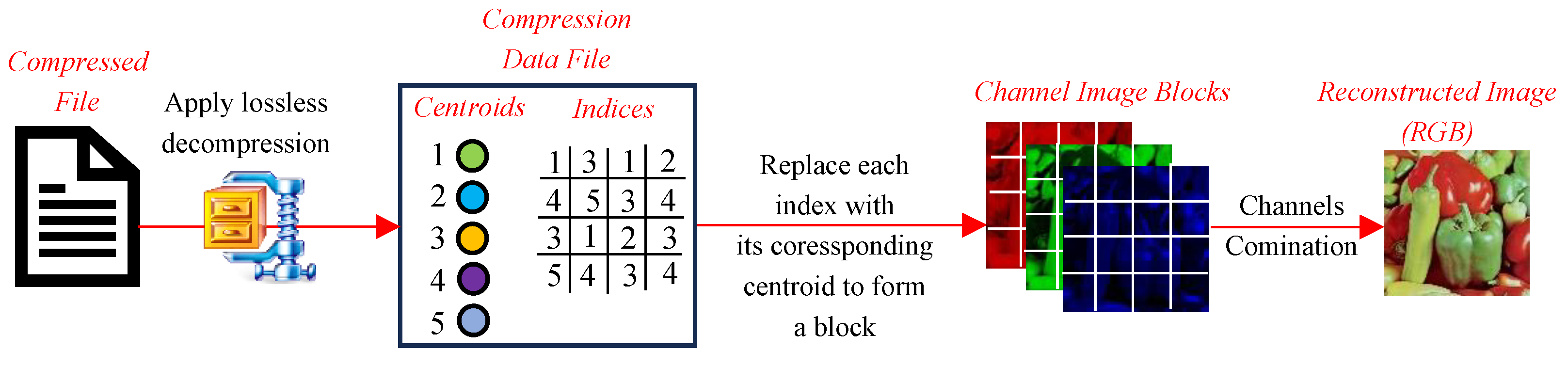
Figure 13.
Peppers image from the Waterloo dataset.

Figure 14.
Results of K-Means clustering for compressing the Peppers image with varying numbers of clusters and block sizes.
Figure 14.
Results of K-Means clustering for compressing the Peppers image with varying numbers of clusters and block sizes.
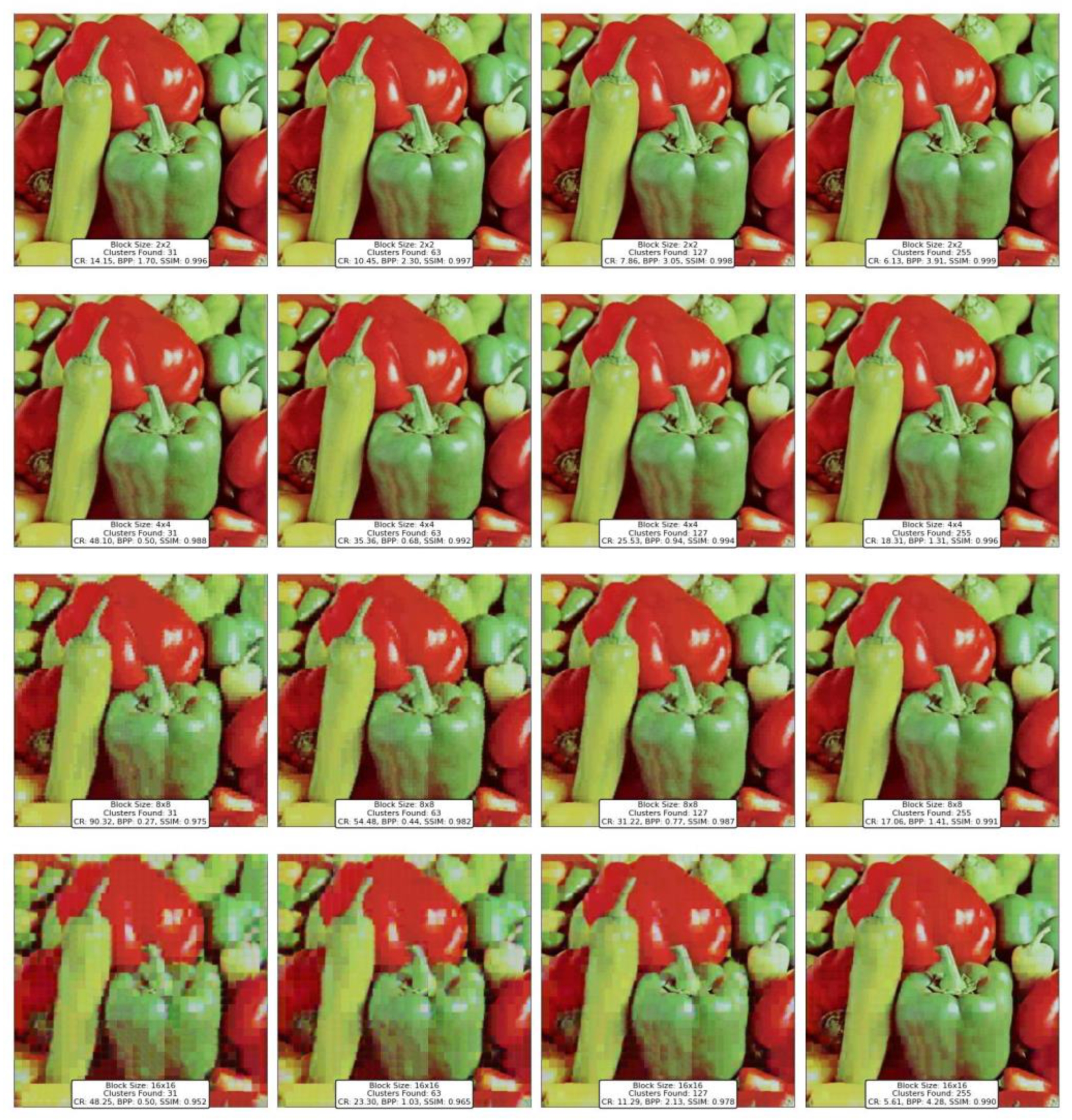
Figure 15.
Results of BIRCH clustering for compressing the Peppers image with varying threshold, branching factor and block sizes.
Figure 15.
Results of BIRCH clustering for compressing the Peppers image with varying threshold, branching factor and block sizes.
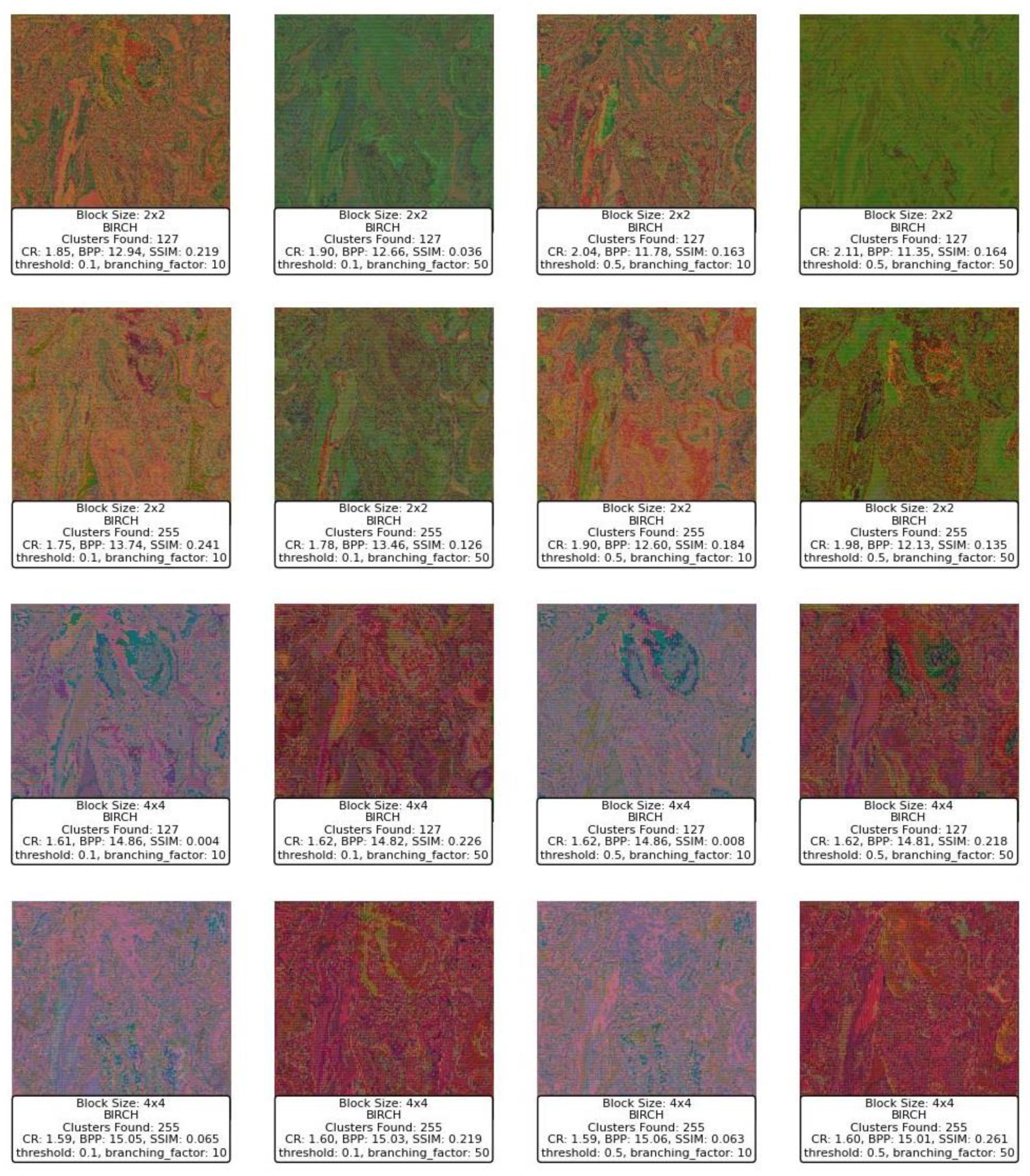
Figure 16.
Results of Divisive clustering for compressing the Peppers image with varying numbers of clusters and block sizes.
Figure 16.
Results of Divisive clustering for compressing the Peppers image with varying numbers of clusters and block sizes.
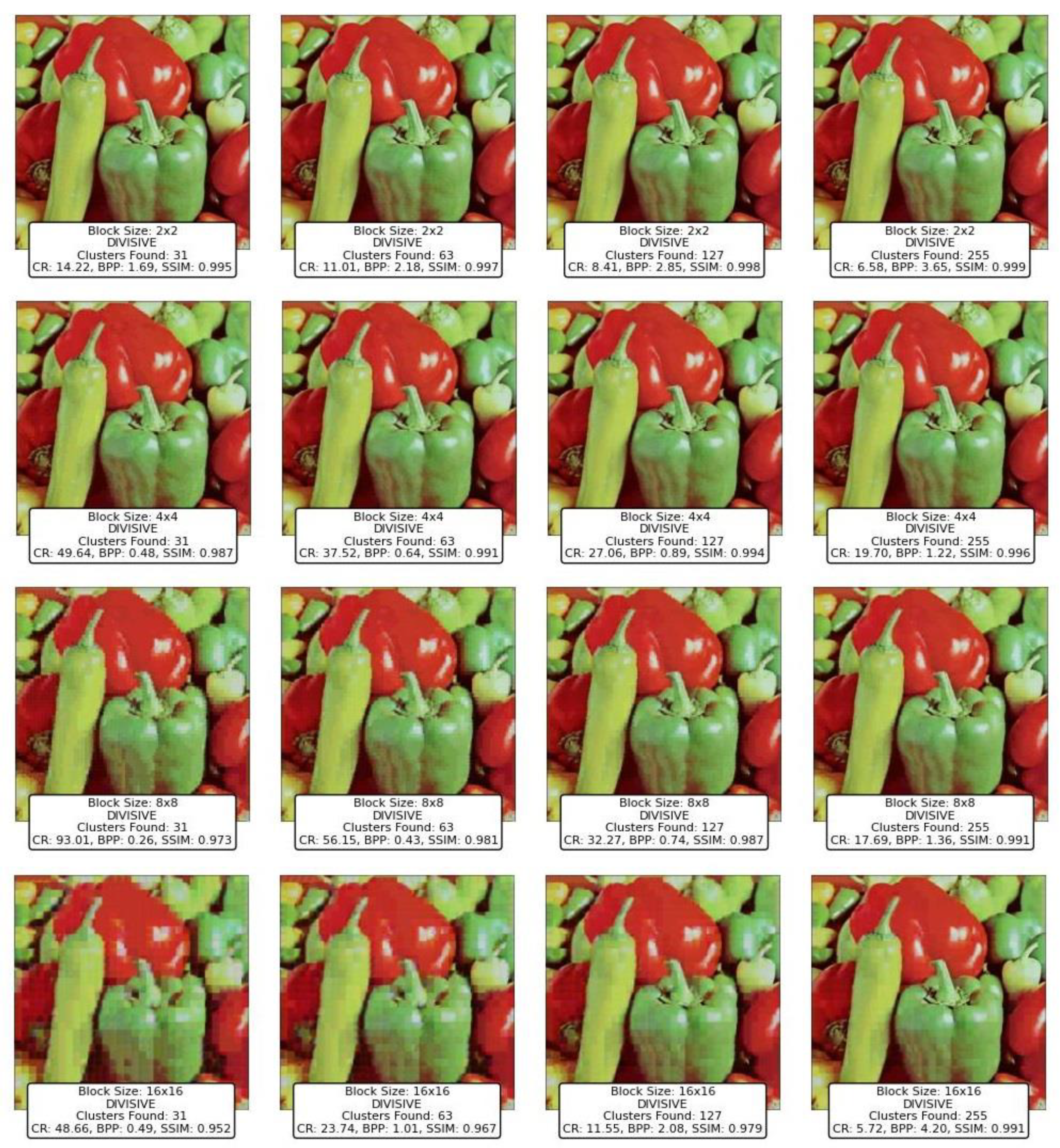
Figure 17.
Results of DBSCAN clustering for compressing the Peppers image with varying eps, min_samples and block sizes.
Figure 17.
Results of DBSCAN clustering for compressing the Peppers image with varying eps, min_samples and block sizes.
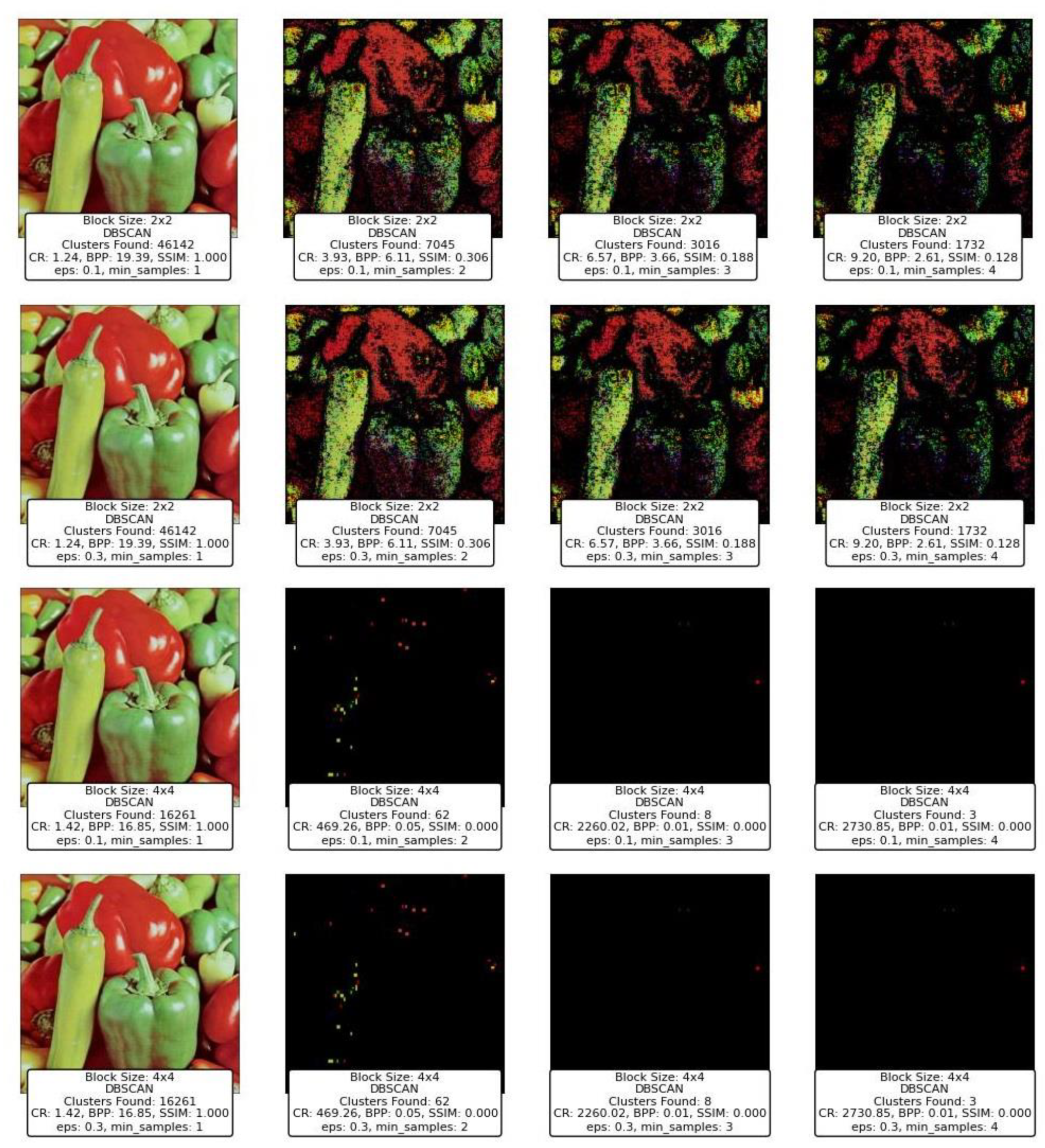
Figure 18.
Results of OPTICS clustering for compressing the Peppers image with varying xi, min-samples and block sizes.
Figure 18.
Results of OPTICS clustering for compressing the Peppers image with varying xi, min-samples and block sizes.
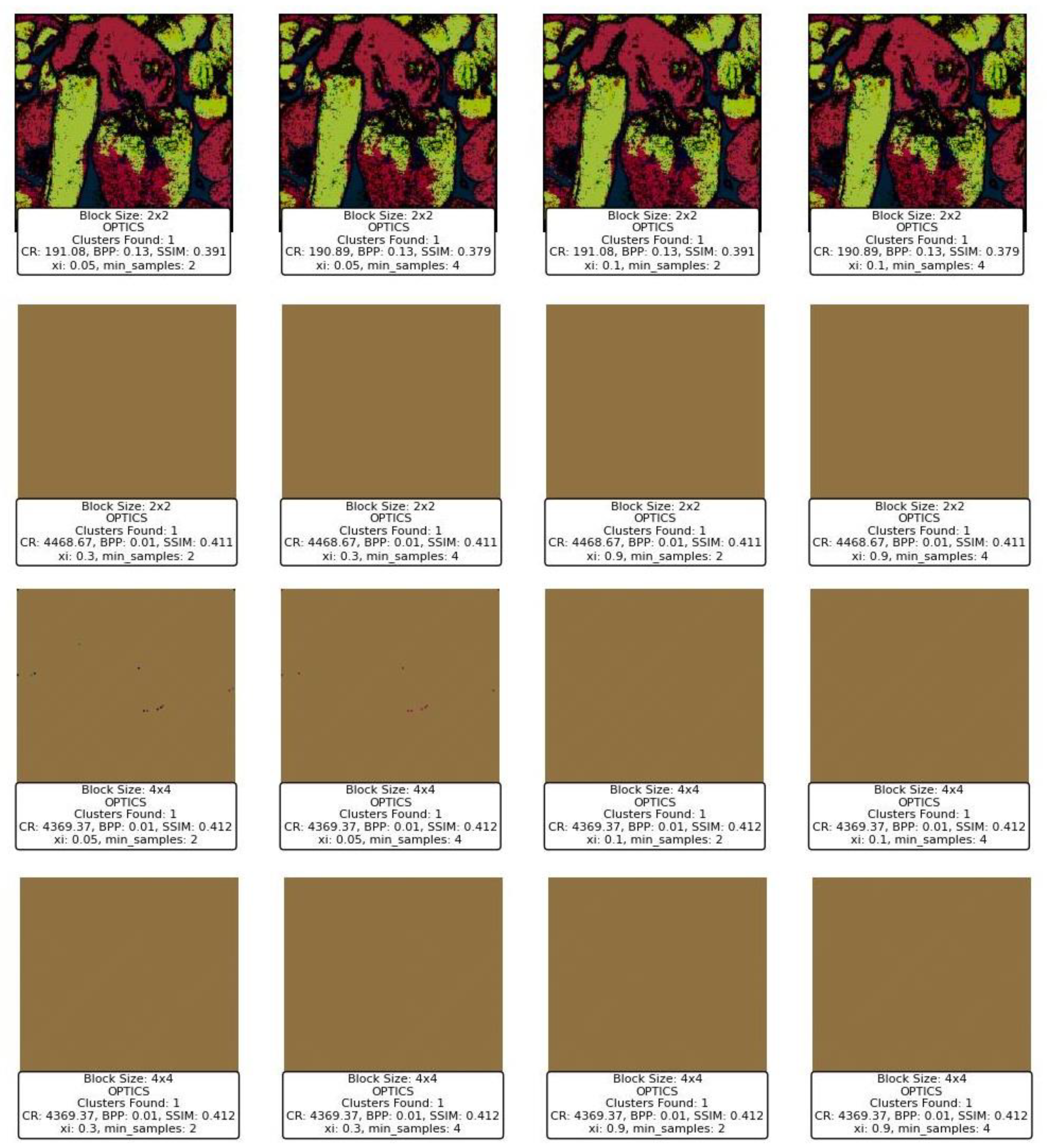
Figure 19.
Results of Mean Shift clustering for compressing the Peppers image with varying bandwidth and block sizes.
Figure 19.
Results of Mean Shift clustering for compressing the Peppers image with varying bandwidth and block sizes.
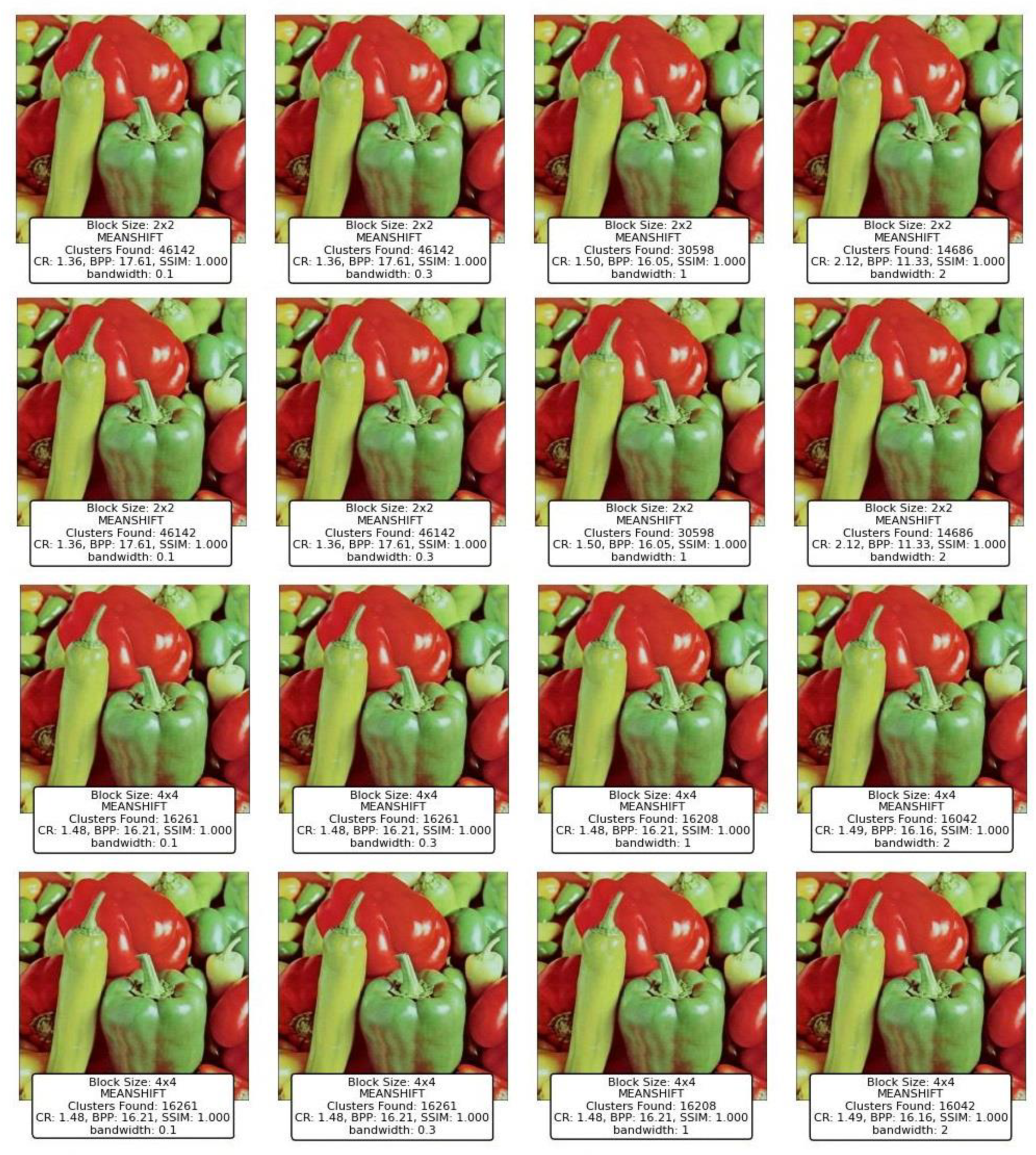
Figure 20.
Results of GMM clustering for compressing the Peppers image with varying numbers of clusters and block sizes.
Figure 20.
Results of GMM clustering for compressing the Peppers image with varying numbers of clusters and block sizes.
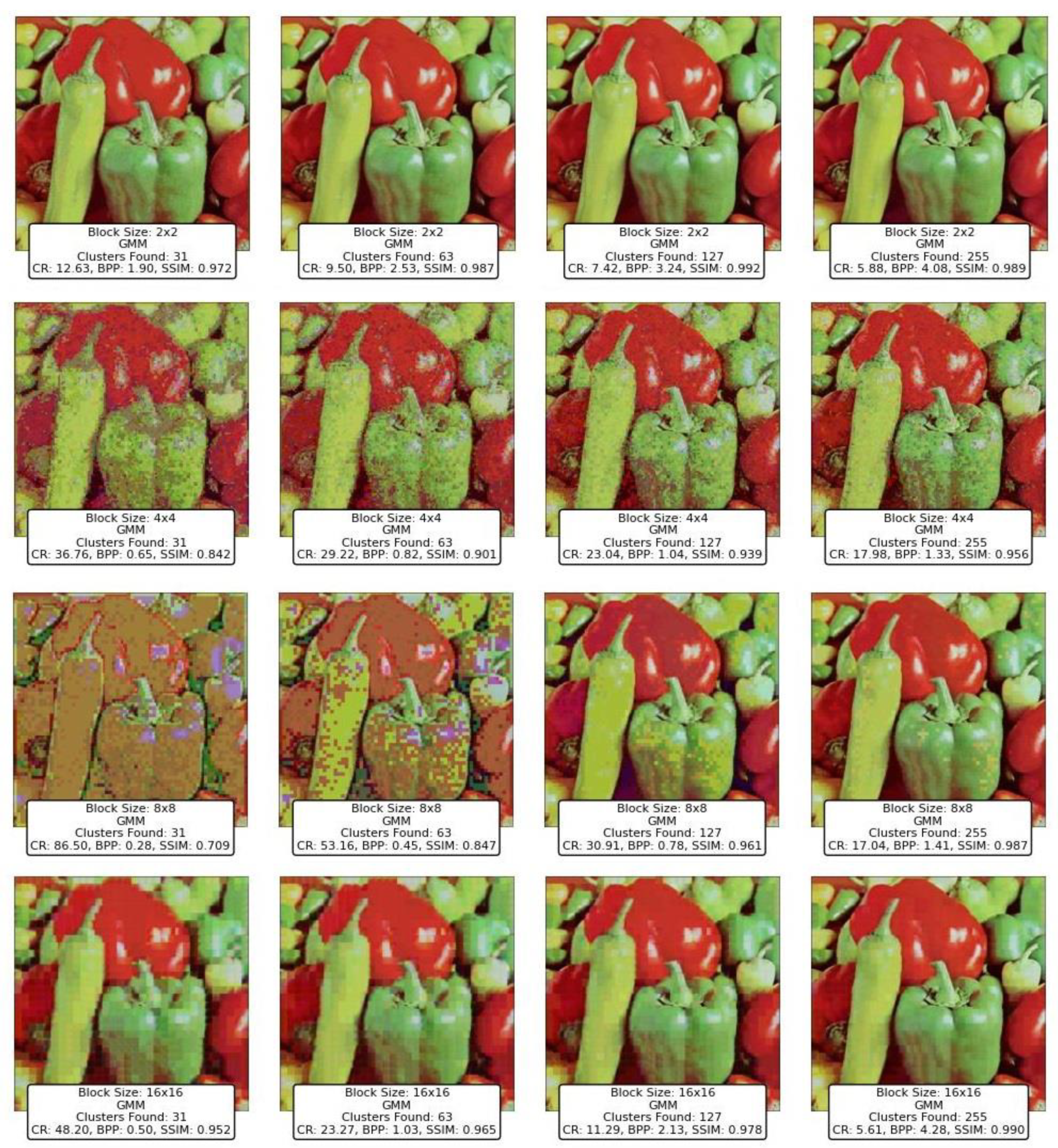
Figure 21.
Results of BGMM clustering for compressing the Peppers image with varying numbers of clusters and block sizes.
Figure 21.
Results of BGMM clustering for compressing the Peppers image with varying numbers of clusters and block sizes.
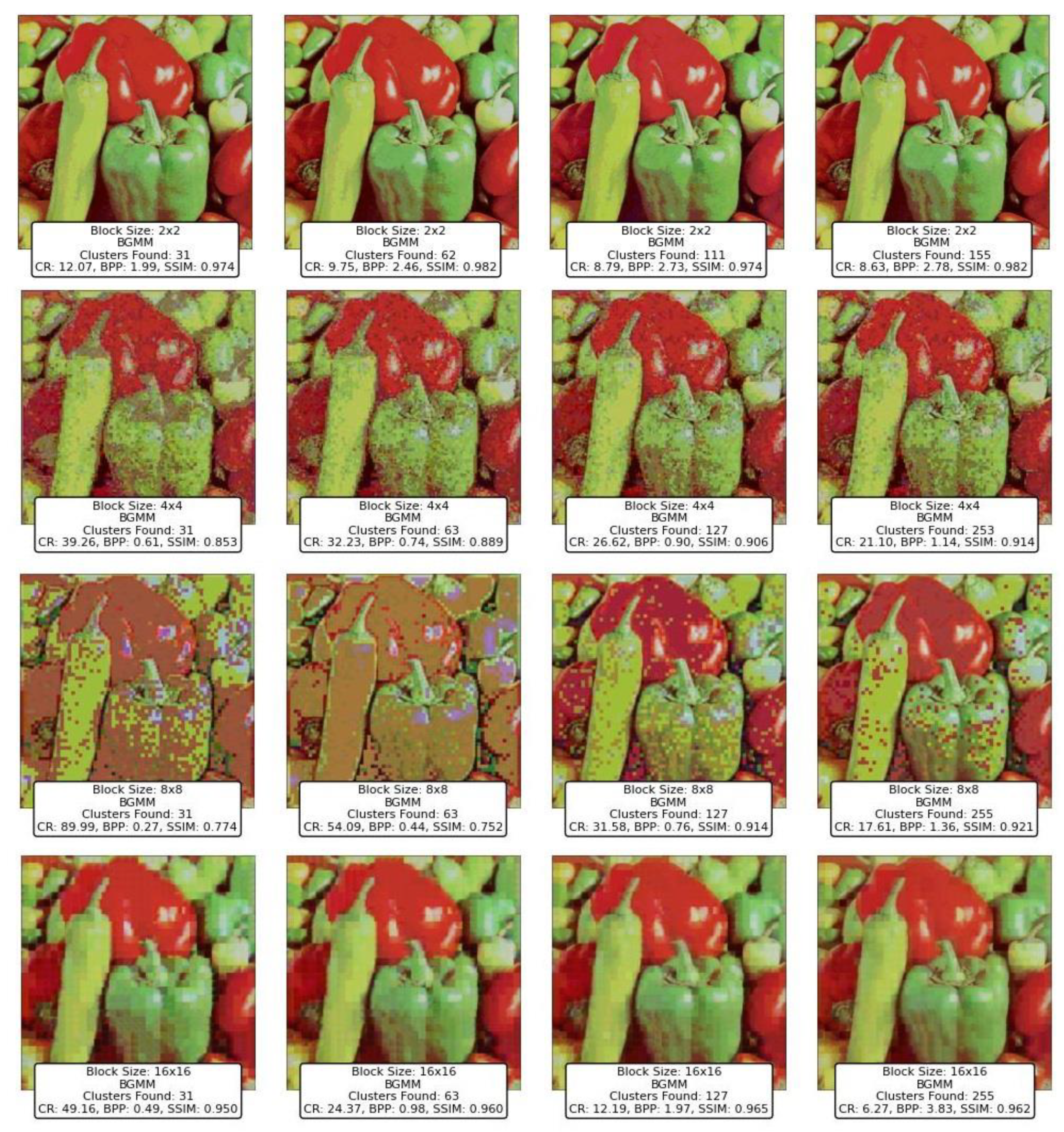
Figure 22.
Results of CLIQUE clustering for compressing the Peppers image with varying grid and block sizes.
Figure 22.
Results of CLIQUE clustering for compressing the Peppers image with varying grid and block sizes.
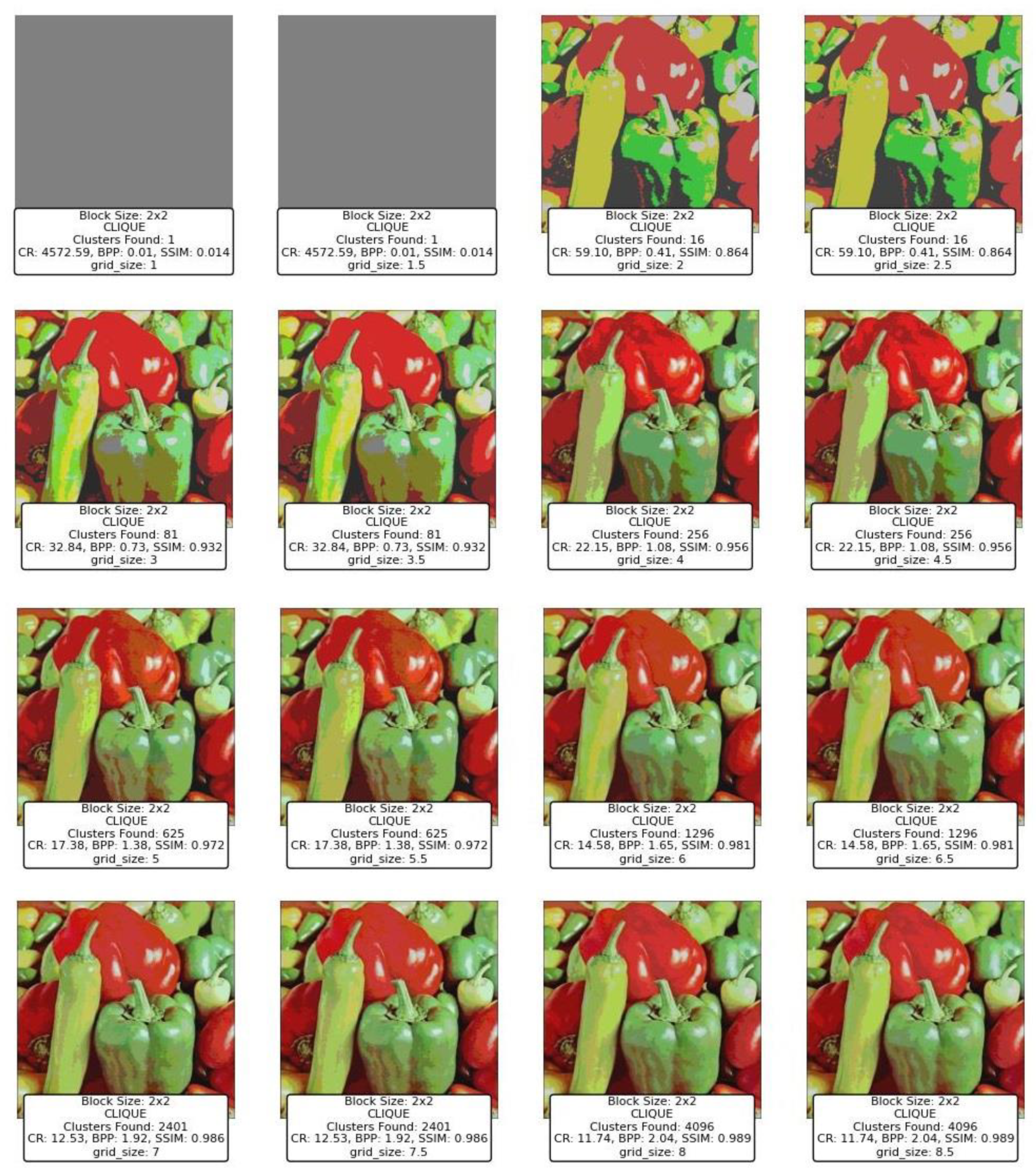
Figure 23.
Benchmark images from CID22 dataset: (a) Sports action (b) Mechanical objects (c) Vehicles (d) Food photography (e) Outdoor scenes with animals (f) Macro photography (insects) (g) Artwork or abstract patterns (h) Cloud formations.
Figure 23.
Benchmark images from CID22 dataset: (a) Sports action (b) Mechanical objects (c) Vehicles (d) Food photography (e) Outdoor scenes with animals (f) Macro photography (insects) (g) Artwork or abstract patterns (h) Cloud formations.
Figure 24.
Compression results of benchmark images using clustering methods.
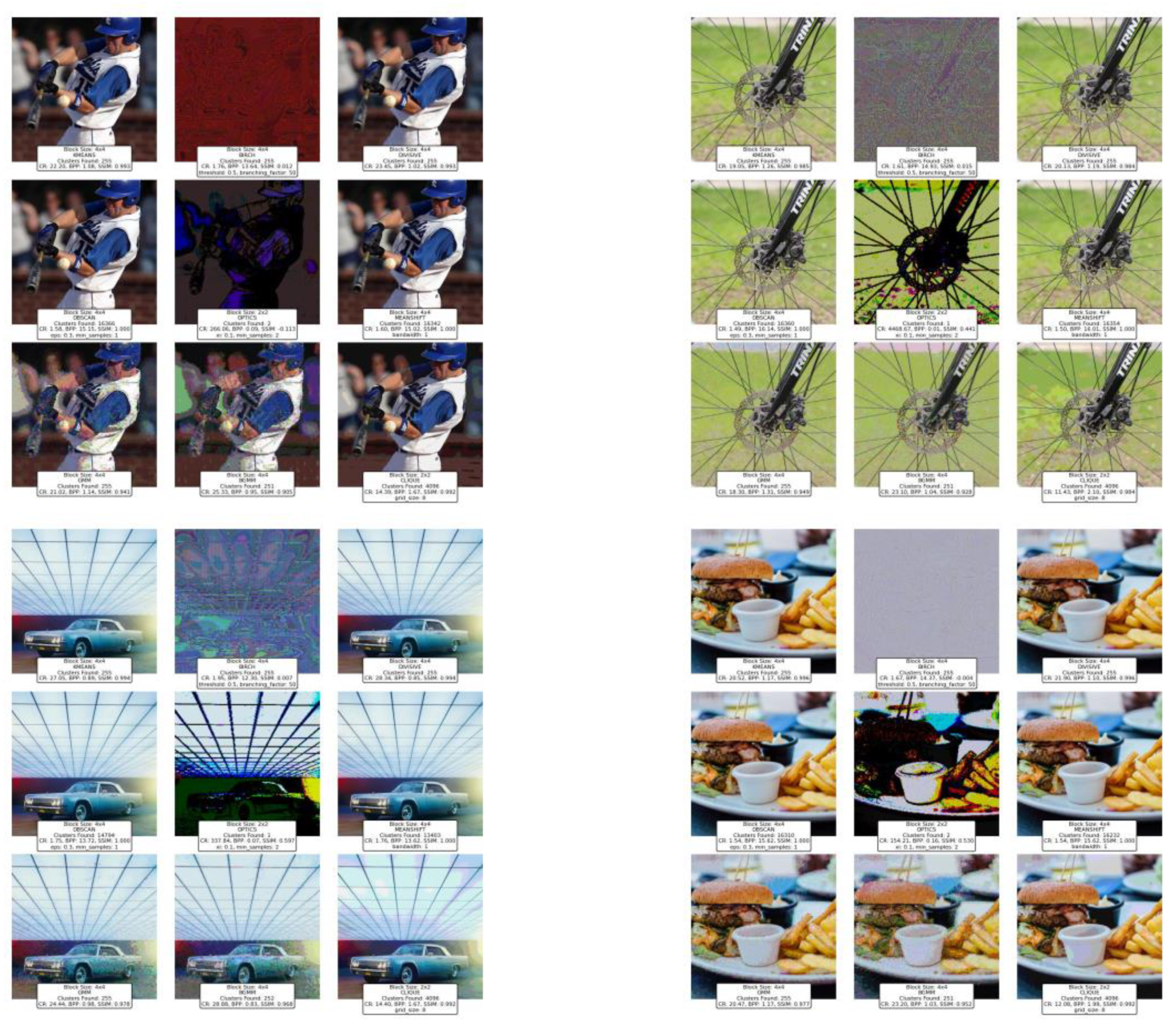
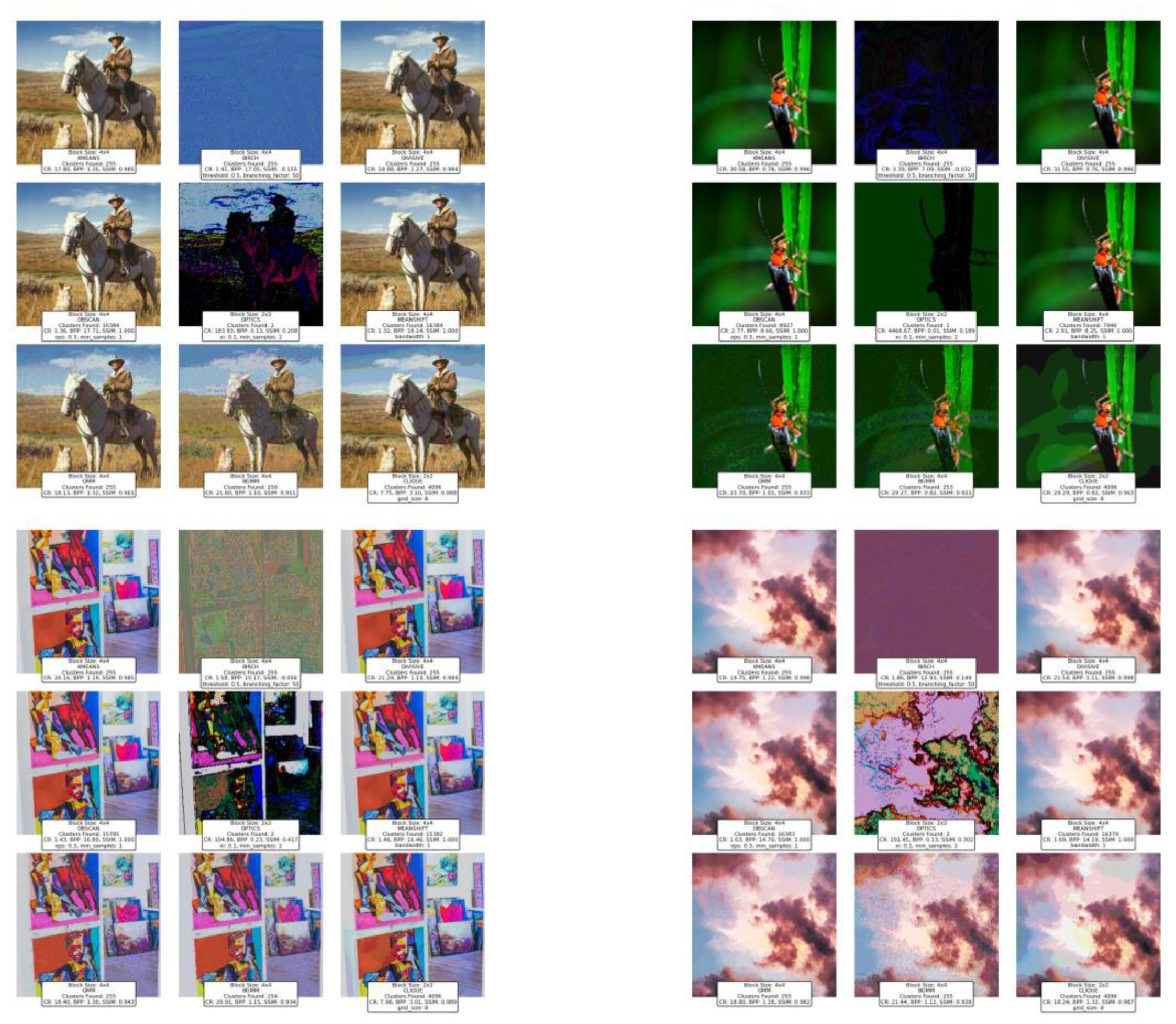

Table 1.
Major differences between DBSCAN and OPTICS.
| DBSCAN | OPTICS | |
| Handling Clusters of Varying Densities | Requires a single value to define the neighborhood | Does not require a single value. Instead, it creates a reachability plot |
| Cluster Identification | Directly labels clusters and noise points based on eps and | Produces an ordering of the data points and a reachability distance for each point |
| Reachability Plot | Not generated | Generated |
| Sensitivity to Parameters | Very sensitive to and | Less sensitive to and |
| Output | Final clusters and noisy points | Ordering of the points and their reachability distances |
|
Computational Complexity |
Generally faster due to its direct clustering approach | More computationally intensive due to reachability plot |
Table 2.
Major differences between GMM and BGMM.
| GMM | BGMM | |
| Number of Clusters | Required | Not required |
| Parameter Estimation | Uses EM algorithm to estimate the parameters | Utilizes variational inference instead of EM |
| Priors | Not incorporated | Incorporated |
| Computational Complexity | Simple | Complex |
| Output | Direct Clustering | Probabilistic Clustering |
Table 3.
Comparative overview of clustering techniques based on key characteristics.
| K-means | BIRCH | Divisive Clustering | DBSCAN | OPTICS | Mean Shift | GMM | BGMM | CLIQUE | |
| Used Parameters | k | k, branching factor, threshold | k | minPts, eps |
minPts, eps optional |
Bandwidth | k | Priors, k optional |
Grid size, density threshold |
| Parameter Estimation | Elbow method, Silhouette | Elbow method, Silhouette | Dendrogram analysis | Heuristic, domain knowledge | Heuristic, domain knowledge | Iterative shifting towards density peaks | Expectation-Maximization | Variational inference | Grid density analysis |
| Sensitivity to Parameters | High | Moderate | N/A | High | Low, depends on minPts | High | High | Low to moderate | Moderate |
| Hierarchical Clustering | No | Yes | Yes | No | No | No | No | No | |
| Number of Clusters | Predefined | Predefined or determined based on CF Tree structure | Determined | Determined by data density | Inferred from reachability plot | Determined by density peaks | Predefined | Inferred from data using priors | Determined by grid density |
| Handling Clusters of Varying Densities | Poor | Good | Moderate | Good | Excellent | Excellent | Poor (assumes Gaussian shape and variance) | Good | Good |
| Cluster Assignment | Hard | Hard | Hard | Soft (points can belong to multiple clusters) | Soft (based on reachability distance) | Hard | Soft (probabilistic) | Soft (probabilistic) | Soft |
| Output | Fixed number of clusters and centroids | CF Tree and clusters | Hierarchical tree and clusters | Cluster labels and noise points | Reachability plot and cluster labels | Cluster labels and convergence points | Mixture components (means, covariances) | Probabilistic cluster memberships and model parameters | Cluster labels |
| Handling Overfitting | Prone to overfitting if k is too high | Moderate) | Moderate | Robust (explicit handling of noise) | Robust | Moderate | Prone to overfitting with too many components | Robust | Grid granularity |
| Complexity | O(n*k* d*iteration) | O(n) | O(n2) | O(n*log(n)) | O(n*log(n)) (slightly higher than DBSCAN) | O(n2) | O(n*k* d*iteration) | Higher than GMM due to variational inference | O(n*grids) |
| Flexibility | Moderate | Moderate to High (handles varying shapes, adaptable structure) | High (can adapt to different cluster shapes) | High (handles arbitrary shapes and noise) | Very High (handles varying densities, arbitrary shapes) | High (handles arbitrary shapes, non-parametric) | Moderate (fixed Gaussian shapes, fixed number of clusters) | High (flexible through priors, infers number of clusters) | Moderate |
| Best Application | When number of clusters is known, clusters are spherical | Large datasets, incremental clustering, data streams | Hierarchical data, large initial clusters need division | Spatial data, noise-prone environments, arbitrary shaped clusters | Complex datasets with varying densities, spatial data | Image processing, complex shapes, non-parametric clustering | When Gaussian assumptions hold, for overlapping clusters | When prior knowledge exists, uncertainty in number of clusters | High-dimensional data |
Table 4.
CR and SSIM metrics for clustering-based compression.
| K-MEANS | BIRCH | DIVISIVE | DBSCAN | OPTICS | MEANSHIFT | GMM | BGMM | CLIQUE | ||||||||||
| Images | CR | SSIM | CR | SSIM | CR | SSIM | CR | SSIM | CR | SSIM | CR | SSIM | CR | SSIM | CR | SSIM | CR | SSIM |
| Sports action | 22.20 | 0.993 | 1.76 | 0.012 | 23.45 | 0.993 | 1.58 | 1.0 | 266.06 | -0.113 | 1.6 | 1.0 | 21.02 | 0.941 | 25.33 | 0.905 | 14.39 | 0.992 |
| Mechanical objects | 19.05 | 0.985 | 1.61 | 0.015 | 20.13 | 0.984 | 1.49 | 1.0 | 4468 | 0.441 | 1.50 | 1.0 | 18.30 | 0.949 | 23.10 | 0.928 | 11.43 | 0.984 |
| Vehicles | 27.05 | 0.994 | 1.95 | 0.007 | 28.34 | 0.994 | 1.75 | 1.0 | 337.84 | 0.597 | 1.76 | 1.0 | 24.44 | 0.978 | 28.88 | 0.968 | 14.40 | 0.992 |
| Food photography | 20.52 | 0.996 | 1.67 | -0.004 | 21.90 | 0.996 | 1.54 | 1.0 | 154.21 | 0.530 | 1.54 | 1.0 | 20.47 | 0.977 | 23.30 | 0.952 | 12.08 | 0.992 |
| Outdoor scenes | 17.80 | 0.985 | 1.41 | -0.155 | 18.88 | 0.984 | 1.36 | 1.0 | 183.93 | 0.208 | 1.32 | 1.0 | 18.13 | 0.961 | 21.80 | 0.911 | 7.75 | 0.988 |
| Macro photography (insects) | 30.58 | 0.996 | 3.39 | -0.032 | 31.55 | 0.996 | 2.77 | 1.0 | 4468.6 | 0.189 | 2.91 | 1.0 | 23.70 | 0.933 | 29.27 | 0.921 | 29.29 | 0.963 |
| Artwork | 20.16 | 0.985 | 1.58 | -0.056 | 21.29 | 0.984 | 1.43 | 1.0 | 104.86 | 0.417 | 1.46 | 1.0 | 18.40 | 0.943 | 20.91 | 0.934 | 7.98 | 0.989 |
| Cloud formations | 19.75 | 0.998 | 1.86 | 0.149 | 21.54 | 0.988 | 1.63 | 1.0 | 191.45 | 0.302 | 1.69 | 1.0 | 18.80 | 0.982 | 21.44 | 0.928 | 18.24 | 0.987 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



