
Submitted:
10 March 2025
Posted:
11 March 2025
You are already at the latest version
Abstract
The rapid evolution of smart cities is driven by the integration of the Internet of Things (IoT) and Information and Communication Technologies (ICT), aiming to enhance urban efficiency, sustainability, and citizen well-being. One of the key enablers of smart cities is Smart Metering Infrastructure (SMI), which facilitates monitoring, data collection, and intelligent control. This paper explores the concept of smart metering, its essential components—including smart meters, communication networks, and data management centers—and its role in smart city applications. Furthermore, it discusses the technological advancements in smart metering, the security and privacy concerns, and the challenges related to deployment and scalability. Additionally, the paper examines the potential integration of Unmanned Aerial Vehicles (UAVs) as part of smart metering systems to enhance operational efficiency. The study concludes with insights into the future trends, opportunities, and policy implications required to optimize smart metering infrastructure within smart cities.
Keywords:
Smart Metering
; Smart City
; IoT
; ICT
; Smart Meters (SM)
; Data Management Center (DMC)
; UAV
; Cybersecurity
; Scalability
; Energy Efficiency
1. Introduction
Measurement is the process of assigning numerical values to physical quantities—a practice fundamental not only in technical fields like engineering, science, and construction but also in everyday life. A measuring instrument, or meter, quantifies parameters such as time, temperature, speed, and density [1].
The concept of Smart Metering Infrastructure builds on this by employing advanced technologies, such as Smart Meters (SMs), to enable bidirectional communication between sensing devices and the Data Management Center (DMC), which also acts as the base station for drone swarms [2,3]. This infrastructure typically includes a variety of components (sensors, hardware, software, communications modules, displays, databases, etc.) that work together in a layered architecture to collect and distribute data efficiently [4].
Rather than being a single technology, smart metering infrastructure integrates multiple technologies to meet its objectives. It generally comprises three main elements: the SM as the endpoint device, the communication network that transfers data, and the DMC, which processes the information gathered from the SMs [5]. An SM is essentially a digital device that measures specific quantities, collects related data, and sends it to the DMC via a secure, reliable, two-way communication network. This bidirectional flow allows the DMC not only to receive real-time data but also to issue commands—such as adjusting reporting intervals—to the SM [5].
Smart cities leverage Information and Communication Technologies (ICT) and the Internet of Things (IoT) to enhance operational efficiency, improve government services, and promote sustainable development to meet growing urban needs [6]. Interest in smart cities has surged following the global financial recession, especially given projections that the world population may double by 2050 [7]. As urban areas become denser, reliance on advanced technologies like SMs, 5G, and drones is increasingly critical to manage urban growth and enhance residents’ quality of life [8].
In smart cities, a wide array of electronic devices makes various urban services more accessible [9]. Often described as a “system of systems,” these cities integrate multiple infrastructures. A robust ICT backbone ensures that all components operate cohesively and adapt to extreme conditions [10]. To fully realize future smart cities, several key features must be implemented [6]:
- Interoperability: Ensuring that all devices can communicate and exchange data seamlessly [6].
- Scalability: Designing systems that maintain efficiency as demands increase [6].
- Fast Deployment: Favoring sustainable, portable solutions that reduce implementation time and labor [6].
- Robustness: Rigorously testing technologies to ensure they can overcome limitations and errors [6].
- Eco-Friendliness and Efficiency: Minimizing power consumption and environmental impact while ensuring cost-effective operation [6].
- Multi-Modal Access: Providing diverse interfaces for input and interaction [6].
- Sustainability: Integrating environmental sustainability as a core design principle [11].
The main objectives of this paper are to:
- Explore the concept and key components of smart metering infrastructure.
- Analyze the role of smart meters within the broader context of smart city development.
- Identify and discuss the major challenges in deploying and securing smart metering systems.
- Examine the benefits of integrating UAVs with smart metering systems.
- Provide insights into policy implications and future research directions for optimizing smart metering in urban environments.
2. A Measuring Instrument: Elements and Features
A measuring instrument, also known as a meter, measures the physical quantity of a sensed variable then delivers the gathered data. In its simplest form, a single unit may provide a direct reading or signal proportional to the variable’s magnitude. In contrast, more advanced instruments can consist of multiple distinct components, as illustrated in Figure 1 [12]. These components might be grouped within one enclosure or distributed across several [12].
At the heart of every measuring system lies the primary sensor, which converts the input—referred to as the measurand—into an output that is generally nearly linear. Examples of primary sensors include thermocouples, liquid-in-glass thermometers, and strain gauges. For instance, a mercury-in-glass thermometer directly indicates the mercury level, functioning as a self-contained measurement system, although it is typically just one part of a more comprehensive system.
In certain situations, the output from a primary transducer may be in an inconvenient format, necessitating conversion via variable conversion elements. For instance, a displacement-measuring strain gauge outputs a variable resistance that is not easily measured directly; hence, a bridge circuit is used to convert this resistance change into a voltage change. When this conversion mechanism is integrated with the primary sensor, the resulting device is termed a transducer.
Furthermore, the overall measurement system’s performance can be enhanced through the incorporation of signal processing components—such as electronic amplifiers—that boost sensitivity and resolution, especially when the primary transducer’s output is minimal (e.g., typical thermocouples yield only a few millivolts). These signal processing elements can also filter out induced noise and remove unwanted offset levels. When both signal processing and transmission functionalities are combined with a transducer, the device is then referred to as a transmitter.
In addition to the core components described above, many measurement systems include one or two extra elements. One component is responsible for transmitting the processed signal to a remote location for further use, while another component—when present—is where the measured signal is ultimately recorded, analyzed, or displayed. In some systems, if the control system is directly fed by the signal then the final step could be omitted.
Traditional and Smart Meters: A Comparison
Technological progress has transformed meters from analog to digital devices. Analog meters produce outputs that vary continuously with even minor changes in the measured quantity, resulting in an infinite number of possible readings within their range. In contrast, digital meters provide outputs in discrete steps, limiting them to a finite set of values.
The introduction of the microprocessor has fundamentally altered conventional measurement devices by adding computational intelligence, giving rise to Smart Meters (SMs) [12]. SMs not only measure physical quantities but also gather additional data compared to traditional meters. They are equipped to exchange this information via electronic communication channels [13] and can attach corresponding timestamps to the data [14].
A notable advantage of SMs is their capability for remote configuration and control; for example, the frequency of data collection can be adjusted remotely, eliminating the need for on-site personnel [15]. Moreover, SMs enhance safety by reducing the necessity for human intervention, particularly in hazardous environments such as military operations or disaster-stricken areas [16].
3. Static Characteristics of Meters
Many characteristics are commonly associated with any meter. These include [12]:
- Accuracy and Uncertainty: This refers to how closely a meter’s reading aligns with the true or accepted value.
- Precision: This describes the degree to which repeated measurements under the same conditions yield the same result, indicating a low spread of values when multiple readings are taken.
- Tolerance: This is the expected maximum error for a given value and is closely related to the concept of accuracy.
- Range or Span: This defines the minimum and maximum limits within which the meter can accurately measure a particular quantity.
- Linearity: This property indicates that the meter’s output is directly proportional to the measured quantity over its operating range.
- Sensitivity: This is the amount of change in the meter’s output that occurs in response to a change in the measured quantity.
- Threshold: This is the minimum level of input required before the meter registers any change in output.
- Resolution: Refers to the relation of measured quantity changes and meter’s output. Where the smallest detectable change in the former results in a discernible change in the latter.
- Sensitivity to Disturbance: Since the validation of a meter’s calibration is considered under standard conditions, such as pressure, temperature, and vibration, any deviation from these conditions may affect its performance. The extent of this effect is measured as sensitivity to disturbance.
- Dead Space: Relates to the range of input values over which there is no observable change in the meter’s output.
4. Smart City Concept
Smart cities are sociotechnical infrastructures characterized by their complexity and diversity. They integrate various human actors—such as citizens, administrative bodies, city operators, and both public and private enterprises—with a range of digital devices like sensors and actuators deployed across urban applications. This multifaceted nature has resulted in a wide array of heterogeneous systems, strategies, and technological solutions aimed at achieving and managing smart cities. A critical component in this ecosystem is the Internet of Things (IoT), which not only advances smart city capabilities but also minimizes the need for human intervention [17].
4.1. Smart City Definitions
The rapid growth of urban populations and advancements in Information and Communication Technologies (ICT) have driven the global spread of the smart city concept. The first city to be labeled as “intelligent” was in Singapore in 1993 [18]. Since then, various terms—including intelligent, information, digital, and ubiquitous cities—have been used interchangeably, albeit without a standardized definition [19]. In essence, a smart city harnesses advanced technologies to enhance the quality of life and city services in a user-friendly manner [20]. According to [19], for any city to be considered as smart, it should embody these four characteristics:
- Green: Commitment to protecting the environment and reducing of CO2 emissions.
- Interconnected: A robust, broadband-enabled infrastructure that supports a modern, digitally-driven economy.
- Intelligent: The capacity to process and manage data collected from sensor networks.
- Innovative: Fostering creativity and leveraging the expertise of a skilled population.
4.2. Smart City Architecture
Beyond technology, a smart city is a complex, infrastructure-based network that aggregates data from numerous electronic sensors to manage urban resources efficiently. The integration of ICT not only connects the various components of the city but also facilitates direct interaction between citizens and the city’s infrastructure [16]. Typically, smart city architecture is seen as three layers: the perception, the network, and the application layers, as depicted in Figure 2 [16].
4.3. Domains and Applications of a Smart City
Any smart city includes several domains, e.g. healthcare, environment, transportation, industry, governance, energy, etc., as well as various applications such as personal devices such as smartphones, and also smart home devices like smart alarm systems. Figure 3 shows smart city domains and applications [17].
5. The Concept of Smart Metering Infrastructure
A smart city fundamentally depends on Information and Communication Technologies (ICT) to interconnect its networked infrastructures [21]. Because different smart city systems are integrated both vertically and horizontally, hence, is often described as a “system of systems” [10]. This interconnection is achieved by employing ICT in areas such as communications, measurement, and network automation to support and drive city growth [4].
Similarly, the Smart Metering Infrastructure (SMI), as a technology, is not a standalone but rather a composite system that integrates multiple technologies to achieve its objectives. SMI comprised of three primary components. The first acts as the terminal device of the system and is called the Smart Meter (SM). The second is responsible for processing, analyzing, and storing the data collected from the SMs and is named as the Data Management Center (DMC). Lastly, a dedicated communication network is vital for enabling data transfer between the SMs and the DMC [5]. As shown in Figure 4 [15], this network facilitates two-way communication, allowing the DMC to send commands, such as real-time monitoring and adjusting data collection frequencies, to the SMs [4].
5.1. Smart Meters (SMs)
Generally, the term SMs describes the measuring devices at the end-user side that measures certain quantities with some accuracy and sends time-stamped readings to the DMC. Thus, two main functions should be done by any SM; measurement and communication [5]. Some SM features are shown in Figure 5 [4].
Some key functional aspects of Smart Meters (SMs) must be emphasized. For instance, in battery-powered SMs, the battery’s lifespan directly limits how frequently and how much data can be transmitted. This necessitates the implementation of power-saving and energy optimization measures [3]. On the other hand, a higher frequency of data readings enables a more in-depth understanding of the behavior of the measured quantities [4]. To support two-way real-time communication between smart meters and the Data Management Center (DMC), the former is typically equipped with transceivers to allow the DMC collecting data in various formats, whether periodic, event-driven, or real time depending on the application [4].
5.2. Data Management Center (DMC)
The Data Management Center (DMC) serves as the control hub of the smart metering infrastructure. It is responsible for processing, storing, and analyzing the data collected from SMs, thereby ensuring that the system’s objectives are met. The DMC represents the hub of the SMI system with analytical functionality to enable communication with other system components. Its core duties include data validation, editing, and storage, as well as issuing commands to SMs when necessary [15,22].
From an infrastructure and hardware perspective, an effective DMC typically comprises the following components [15]:
- Data Center Infrastructure: The physical facility that houses the primary system along with auxiliary systems such as backup power supplies, ventilation, and alarm systems.
- Servers: Hardware that processes the incoming data.
- Storage Systems: Resource used to store data and enable connection with other system components.
- Database Systems: Software tools used for analyzing stored data.
- Virtualization Systems: Technologies that enhance computing resource utilization and optimize storage management.
Because the data collected may include sensitive personal and business information, these facilities must be secure and disaster-proof. Robust backup and emergency plans are critical, though meeting these requirements can be costly. Virtualization and cloud computing are often adopted to mitigate these expenses [15].
5.3. Communication Structure
A reliable and secure communications network is essential for transferring data between SMs and the DMC, as it supports the critical two-way information flow in the SMI [5,22]. Several well-established wireless technologies are commonly employed, each adhering to accepted standards that ensure interoperability. These include:
Bluetooth: An open wireless standard, also known as IEEE 802.15.1, is suitable for short-range data transfer that forms a Personal Area Network (PAN) that might need multiple connections. Originally developed as a wireless alternative to replace the RS232 cables, it is ideal for linking fixed and mobile nodes [5].
Zigbee: Developed by the Zigbee Alliance (ISO/IEC 14908, 2008), this low-power wireless protocol is designed for monitoring and controlling remote devices in Wireless Sensor Networks (WSNs). Zigbee’s network and application layers are based on the PHY and IEEE 802.15.4 MAC layers. Although Zigbee’s self-configuring and self-healing capabilities make it suitable for certain metering applications, its susceptibility to interference and limited memory can lead to processing delays [5].
6LoWPAN: Short for IPv6 over Low-power Wireless Personal Area Network, this IETF standard enables even small devices to receive an IPv6 address, which is crucial for IoT applications. It is characterized by low power consumption and low bandwidth, addressing compatibility issues with constrained nodes through IPv6 compression techniques [5,9].
Wi-Fi (IEEE 802.11): This Wireless Local Area Network (WLAN) technology operates on either the 2.4 GHz or 5 GHz ISM bands. While its range is generally limited, high-powered antennas can extend its coverage. Multiple standards (e.g., 802.11a, b, g, n) offer different frequency spectrums, data rates, and modulation methods [5].
WiMAX (IEEE 802.16): Standing for Worldwide Interoperability for Microwave Access. WiMAX works in two modes; point-to-point and point-to-multipoint allowing a fast bi-directional communication of up to 72 Mbits/s. Adopting scalable Orthogonal Frequency Division Multiplexing (OFDM) technology with a large bandwidth of about (1.25–20 MHz), and using adaptive modulation schemes (BPSK, QPSK, 16-QAM, or 64-QAM) [5].
SMI can be integrated with various open-standard wireless technologies including 2G, 2.5G, 3G, 4G, Long-Term Evolution (LTE), Global System for Mobile Communication (GSM), Enhanced Data for Global Evolution (EDGE), General Packet Radio Service (GPRS), digital Private Mobile Radio (PMR), two-way radio paging, and satellite networks, among others. More details on the aforementioned technologies are given in reference [24]. Smart infrastructures usually rely on robust communication networks, and hence, any security threat to the communication could lead to service disruptions due to network congestion, misconfigurations, interference, and other related issues [5].
5.4. Opportunities for UAVs as Part of SMI
The smart city concept starts with the integration of technology that offers to provide services more quickly and efficiently to residents. In this regard, Unmanned Aerial Vehicles (UAVs), or drones, have a massive amount of capability for rapidly transforming from a futuristic view to reality and improving life quality for citizens in smart cities [8].
A UAV, commonly known as a drone, can be operated either by a human using remote controls or fly on its own using pre-programmed flight plans. The typical setup of a commercial drone includes components like remote controls, data processors, monitoring systems, and landing gear. These internal systems handle a wide range of tasks, from navigation to sending data back to the ground [8]. Before a drone can be used for commercial and civilian purposes, it must meet specific requirements tailored to the needs of its users. For instance, drones need to be dependable and equipped with precise navigation systems. Given that urban areas are often crowded with buildings and people, it’s essential for drones to have collision avoidance sensors, GPS, and waypoint navigation features supported by digital maps [25].
In a smart city setting, UAVs can significantly contribute to innovation and boost economic growth. Drones have the potential to not only enhance existing practices but also to create new solutions and opportunities that weren’t feasible before. Some of the potential applications for drones in smart cities include monitoring traffic, delivering packages, supporting law enforcement, providing emergency medical services, assisting in firefighting and rescue missions, and managing pollution control [8].
6. SMIs Issues: Privacy, Security, and Policy Issues
Exchanging personal and sensitive data is critical in SMIs, yet transmitting and storing such information over long distances poses risks of theft or manipulation. It is essential that commands from the DMC to SMs are authenticated and secured. Furthermore, maintaining residents’ trust is crucial for the successful operation and future expansion of SMIs. If citizens suspect that their data could be misused or that service quality might suffer due to unauthorized interference or hacking, they may resist the implementation of SMIs [15]. Ensuring robust cybersecurity and safeguarding privacy is therefore a fundamental requirement for any SMI [26].
6.1. Privacy
The data transmitted within an SMI can be highly valuable to various third parties, such as insurance companies, entertainment agencies, and governmental bodies [15]. Because SMs handle sensitive information, protecting individual privacy is a major concern. Unauthorized access to network data could expose personal details like names, addresses, and identification numbers [5,15].
6.2. Security
Like other systems, SMIs must adhere to key security principles, often summarized by the CIA triad (Confidentiality, Integrity, Availability), with Accountability as an additional critical factor [22]:
Confidentiality: Ensuring that collected data remains private is paramount. Measures must be in place to prevent unauthorized access through physical theft of SMs, breaches via network gateways, or cross-access among clients. At the DMC, only authorized systems should have access to the stored information [15,22].
Integrity: This involves protecting data—both the readings from SMs and the control commands sent to them—from unauthorized alteration. Hackers might try to compromise system integrity by masquerading as authorized entities to inject harmful commands, so robust safeguards against illegal data tampering are necessary [15,22].
Availability: The required frequency and accuracy of data collection vary by application. While some data can be recorded at longer intervals or estimated, other applications demand real-time or near-real-time data. Unavailability of data can result from component failures (whether physical, software-related, or due to human tampering) or communication disruptions caused by interference, bandwidth loss, or heavy network traffic [15].
6.3. Policy Issues
The deployment of SMs for collecting various types of data has sparked several policy concerns. The threat of both known and unforeseen attacks has led to proposals for diverse policy frameworks aimed at securing these systems and providing standardized guidelines for organizations involved in security policy development [5]. According to [5], five policy metrics must be considered when adopting new technologies: economic, social, technical, political, and environmental. The high costs associated with developing and maintaining SMIs must be weighed against their benefits. Social acceptance hinges on factors like pricing, privacy, confidentiality, security, and accessibility. Ultimately, as meters become more advanced, the need for robust security measures to protect against data tampering, theft, system hijacking, and physical attacks increases [5].
7. Challenges in Smart Meters Infrastructure
SMIs face several challenges that necessitate continuous evolution. Key challenges include [5]:
- Cost: The expenses associated with implementing, deploying, and maintaining SMs must be justified by their benefits.
- Privacy Issues: SMIs continue to grapple with data handling and security concerns, particularly in encountering different network attacks.
- Data Analytics: Effective data analysis needs adequate hardware and software, with requirements varying based on the application, data volume, and desired response time [5].
8. Literature Review
General UAV Review
Two key areas were examined in the literature review: first, the definition and challenges associated with UAVs; and second, the most recent applications of UAVs in smart cities.
Definition and Evolution: UAVs, often referred to as drones, are pilotless aircraft that can either be remotely controlled or fly autonomously to a certain degree. While earlier unmanned vehicles, like hot air balloons, might technically be classified as unmanned, they are typically not viewed as drones due to their lack of controllable flight capabilities [27]. The term “drone” became more popular after World War I, with developments such as the Larynx (1927), Fairy Queen (1931), and DH.82B Queen Bee. It’s believed that the name “Queen Bee” for these pilotless aircraft contributed to the eventual use of the term “drone,” which refers to male bees [28]. The US Navy was the first to officially use the term in 1935 [29].
Routing Protocols in Aerial Networks: Several routing protocols have been explored for Aerial Ad-hoc Networks (AANETs). For instance, the proactive Topology Broadcast based on Reverse-Path Forwarding (TBRPF) minimizes overhead [30]. In contrast, reactive protocols like Dynamic Source Routing (DSR) determine paths only when data needs to be sent, which can be advantageous in highly mobile environments with unstable topologies [31,32]. Other proposals include:
- RP-CDMA: A MAC layer protocol for AANETs, with simulation results demonstrating its effectiveness over classical routing algorithms [33].
- Hybrid Approaches: Studies indicate that while greedy geographic forwarding is effective for densely deployed networks, incorporating methods like face routing may be necessary for 100% reliability in sparse deployments [36].
Mobility Models: Mobility models, which dictate the movement of nodes based on location and velocity changes, are critical for AANET performance [37]. Common models include:
Additionally, UAV-specific mobility models have been proposed for scenarios such as reconnaissance [42] and disaster response, where maximizing ground coverage while maintaining network connectivity is crucial [37,43].
Multi-UAV Systems (FANETs): In many applications, a single UAV is insufficient, leading to the use of multi-UAV systems—often termed Flying Ad-hoc Networks (FANETs). These systems, which are a specialized form of MANETs and VANETs, leverage collaborative drones for tasks like object detection and tracking [44]. FANETs face unique challenges due to varying mobility patterns, density, power consumption, computation capabilities, radio propagation, localization, and rapidly changing topologies. Addressing these challenges requires the design and testing of new layered communication protocols and dedicated simulation platforms [45].
Communication Design and Challenges: Several studies have discussed open issues when adapting current communication technologies to aerial networks [45,46]. Mission objectives significantly influence 3D network design requirements [47]. Notable contributions include:
Path Conflicts and Trajectory Planning: To avoid collisions and conflicts, trajectory planning algorithms—such as those developed under the Aerial Robotics Cooperative Assembly System (ARCAS) project—use waypoints and predicted arrival times to detect conflicts, subsequently recalculating trajectories and adjusting velocities and accelerations [50,51].
Real-Time Data Transfer and Applications: For applications that need real-time data transfer, such as surveillance and monitoring, existing infrastructures like cellular base stations are frequently utilized:
Coverage, Energy, and System Design: Researchers have also investigated coverage and power consumption in both urban [59,60] and rural [61] settings. Limited drone energy is a significant challenge, leading some researchers to suggest strategies for reducing overall energy consumption. These methods focus on optimizing both communication and propulsion systems while maintaining the necessary data throughput for ground nodes [62].
In construction and other domain-specific applications, system designs vary:
- Application Domains: AANET applications span a broad range of fields:
- Forest Management: Single aircraft have been used for managing forests in rural environments [73].
- Emergency Networks: In disaster scenarios, UAVs can establish emergency wireless networks, overcoming spatial and environmental constraints thanks to their mobility and flexibility [74].
- Delivery Services: UAVs are also applied in delivery contexts—indoors (e.g., offices or factories [78]) and outdoors (e.g., postal services [79], pizza [80], beer [81]). They are integral to urban package delivery (e.g., Amazon [82]) and rural logistics (e.g., Matternet [83]). Various delivery schemes and routing approaches have been proposed [84], including a hybrid delivery scheme designed to dynamically control and reduce air traffic based on current operational conditions.
Comparative Studies: Table 2 presents a comparative study of these approaches, highlighting key parameters across different application domains.
This comprehensive review highlights the evolution, protocols, mobility considerations, communication challenges, and diverse applications of UAVs in smart cities, providing a solid foundation for understanding their role in future urban infrastructure.
9. UAV as a Platform in Smart Cities Review
Recent literature highlights a limited number of studies that explore the use of drones as service platforms in smart city applications. A comprehensive survey of these works is summarized in Table 3. Throughout this study, the terms UAV and drones are used interchangeably.
Several studies have proposed UAV-based solutions for emergency response. In [87], a drone system utilizing Ultra-Wideband (UWB) sensors was introduced for locating individuals in hazardous environments such as firefighters, police, and military personnel. The system can either relay data to a monitoring station or operate autonomously along a predefined path. Similarly, research in [88] explored the use of Micro Indoor-Drones (MINs) to assist First Responders (FRs) in environments without Global Navigation Satellite System (GNSS) coverage. This approach is particularly useful in disaster scenarios like earthquakes, where buildings collapse and infrastructure, including communication and power, is disrupted. By forming a mesh network, MINs can help locate FRs carrying specific tracking devices.
Drones have also been deployed for search-and-rescue missions. A UAV swarm-based search method was proposed in [89] for locating missing persons in forested areas, operating over a 10 km radius despite the absence of communication infrastructure. Thermal and multispectral imaging cameras were used, and a convolutional neural network (CNN) with a You Only Look Once (YOLO) algorithm enabled real-time analysis of video streams [90]. Additionally, UAV swarms were suggested in [91] for wildfire suppression, where hundreds of drones equipped with a continuous extinguishing liquid system were deployed. Although the system relies on centralized control via 4G/5G LTE, it requires integration with existing aerial and ground firefighting forces.
To improve drone swarm coordination, the Mission-Based UAV Swarm Coordination Protocol (MUSCOP) was developed in [92]. This protocol enhances swarm cohesion with minimal positioning errors, even in challenging communication environments. Further refinements in [93] introduced resilience and scalability features, enabling swarms to split into sub-groups in case of communication failure. The system includes master and backup UAVs to ensure continuous operation and prevent collisions through altitude differentiation.
The use of UAVs in public health applications was explored in [94], where a drone-based system was designed for monitoring COVID-19 symptoms. Wearable sensors transmitted biometric data to drones via a push-pull mechanism, which was useful in remote or congested areas. A piloted drone equipped with a thermal camera scanned individuals for elevated body temperature, triggering alerts when fever symptoms were detected. The system demonstrated efficiency in scanning and sanitizing large areas within a short time.
In another application, drone swarms were used for security and surveillance. Research in [95] implemented real-time object detection and threat assessment using Synthetic Aperture Radar (SAR) and Electro-Optical/Infrared Sensors (EO/IR). The UAVs autonomously altered flight paths to evade potential threats based on detected data.
These studies collectively underscore the potential of UAVs in smart city applications by improving emergency response times, overcoming geographical constraints, and enhancing safety. However, successful UAV-based system deployment requires careful consideration of communication protocols, data management, hardware selection, and integration with existing infrastructure.

Table 3.
UAV platform applications comparative work.
| Paper Title | Objective | Methodology | Conclusion | Future Work |
|---|---|---|---|---|
| UAV-Based System for Indoor Human Localization (2018) [87] | Experimentally testing external localization of individuals in enclosed spaces. | A piloted UAV equipped with Ultra-Wideband (UWB) radio technology. | The proposed system offers high mobility and simultaneously tracks the positions of team members. | Deploying the proposed technique in real-world applications and incorporating 3D position estimation for moving people. |
| Swarm of Quadcopters for Search Operations (2019) [89] | Finding a missing person within a 10 km radius by determining precise coordinates. | Utilizing a Pixhawk 4 flight controller, multispectral cameras, thermal imaging, and YOLO CNN running on Nvidia Jetson TX2 at the operator’s end. | The system successfully detected individuals and navigated obstacles during collision avoidance tests. | Enabling onboard video processing on UAVs and testing UAVs as radio relays for communication and navigation. |
| MUSCOP: A Mission-Based UAV Swarm Coordination Protocol (2020) [92] | Introducing a new protocol (MUSCOP) for synchronizing UAV swarms in flight. | Developing a conceptual framework and validating it using the ArduSim simulator. | Achieves stable swarm formation, high resilience to channel losses, and scalable performance. | Implementing the protocol across multiple computing systems and optimizing swarm takeoff to minimize collisions. |
| UAV-Based Network and Methods for COVID-19 Response (2021) [94] | Investigating UAV-based solutions for COVID-19 scenarios and proposing an architecture for pandemic management in simulations and real-world applications. | Simulation: UAVs gather data from wearable sensors. Real-world: A piloted drone equipped with a thermal camera scans individuals and sanitizes areas when infection is detected. | Real-world: The approach enables rapid large-area COVID-19 testing. Simulation: Thermal imaging effectively identifies individuals in COVID-19 scenarios. | Implementing indoor screening with multiple mini-drones for scenarios where individuals cannot travel for testing. Testing drone endurance for prolonged indoor operations. |
| Micro Indoor-Drones (MINs) for First Responder Localization (2021) [88] | Assisting SAR operations by tracking FRs inside buildings without GNSS access. | Establishing an indoor UWB network for precise FR localization. | MINs effectively address GNSS-denied localization challenges, enabling accurate FR tracking indoors. | Developing swarm algorithms to facilitate self-deployment of MINs. |
| Drone Swarm Mission Planning and Execution in Hostile Environments (2021) [95] | Designing swarm route planning strategies and detecting hazardous objects. | Route planning via MILP and object detection using EO/IR camera images, SAR, YOLO CNN, and rule-based classification. | The developed detection and classification algorithms are compatible with lightweight mobile platforms and UAV systems. | Adapting mission strategies when detecting threats. Comparing drone-captured images with digital maps for precise localization. |
| Conceptual Framework for Drone Swarms in Fire Suppression (2021) [91] | Utilizing UAV swarms to minimize human risks in wildfires by simulating rainfall effects. | Employing a GD-40X drone, which communicates with a DMC via 4G/5G and autonomously returns for battery replacement and refueling. | Effective implementation requires advanced technology, necessitating further research. | Investigating the impact of rainfall on aircraft, studying UAV resistance to wind and high temperatures, and designing hybrid UAVs with increased payload capacity. |
| Adaptive and Resilient Swarm Management Model (2021) [93] | Enhancing swarm robustness and scalability through reconfigurable formations and fault tolerance. | Establishing a scalable and reliable framework, validated via the ArduSim simulator. | Ensures effective failure handling, minimizes collision risks during reconfiguration, and is applicable across diverse environments. | Exploring AI-based collision avoidance techniques and evaluating UAV integration into swarms during flight. |
The review of the literature reveals that few researchers have explored the use of Smart Meters (SMs) for smart city applications, and there is a lack of comprehensive descriptions of the proposed frameworks or protocols. Additionally, the reliability of these systems is not frequently addressed in existing studies. Furthermore, there is limited research focused on analyzing energy consumption and security concerns related to these systems.
10. Findings and Analysis
This section presents key findings derived from the study, highlighting numerical data, performance metrics, and comparative assessments of UAV-based Smart Metering Infrastructure (SMI) applications [96,97,98,99,100,101,102,103]. The findings are supported by relevant plots to provide a clearer representation of trends and trade-offs.
10.1. Smart Metering Infrastructure (SMI) Performance
Data Collection Frequency vs. Power Consumption: One of the fundamental trade-offs in smart metering infrastructure is data collection frequency vs. power consumption. While high-frequency data collection improves real-time monitoring and system responsiveness, it significantly increases energy consumption, particularly in battery-powered SMs. As shown in Figure 6, increasing the frequency of data collection from low to high results in a substantial rise in power consumption. This highlights the need for energy optimization strategies, particularly for battery-constrained smart meters [3,4].
Security and Privacy Considerations: Smart Metering Infrastructure (SMI) systems require robust security mechanisms to protect user data. Privacy threats include unauthorized access, data interception, and manipulation. Studies indicate that cybersecurity measures such as encryption, authentication, and intrusion detection are necessary to maintain system integrity [22,26].
10.2. UAV-Assisted Smart Metering and Surveillance
Search and Rescue Missions: UAVs have proven effective in search-and-rescue operations, particularly in forested and remote areas. In a field study [89], UAVs equipped with thermal and infrared cameras were deployed to locate missing individuals. The study revealed that a UAV swarm operating within a 10 km search radius was able to detect missing persons within approximately 10 hours, as shown in Figure 6. The efficiency of UAV-based searches is evident, but operational challenges such as battery limitations, communication reliability, and real-time data processing must be addressed to further improve response times.
Firefighting and Disaster Management: Firefighting UAVs are capable of detecting and suppressing wildfires using an aerial dispersal mechanism. A study in [91] demonstrated that drones with a 20–30 kg payload capacity could sustain 1-hour fire suppression missions. The relationship between payload capacity and mission duration is depicted in Figure 6. While higher payloads extend operational effectiveness, they also increase energy demands, requiring efficient power management solutions.
10.3. UAVs in Public Health and Security
COVID-19 Detection and Containment: UAVs have been explored for public health applications, including pandemic monitoring and containment. A COVID-19 detection system was implemented using UAVs equipped with thermal cameras to identify potential infections based on body temperature readings [94].
- The system successfully scanned a 2 km² area in approximately 10 minutes, demonstrating its efficiency in rapidly identifying potential cases.
- The drone-based scanning method significantly reduced human contact risks, making it a viable tool for high-density urban environments.
The efficiency of UAV screening operations is shown in Figure 6, where longer scanning times lead to increased coverage areas.
Threat Detection and Avoidance: UAVs equipped with Synthetic Aperture Radar (SAR) and Electro-Optical/Infrared (EO/IR) sensors have been deployed for real-time object detection and security monitoring [95]. These systems autonomously adjust flight paths when potential threats are detected, reducing risks to the aerial platform.
11. Conclusions
Smart metering infrastructure plays a crucial role in the realization of smart cities, enabling real-time monitoring, efficient resource management, and data-driven decision-making. Despite its advantages, challenges such as data security, privacy concerns, high deployment costs, and scalability issues remain significant barriers to widespread adoption. The integration of UAVs offers promising opportunities to enhance the efficiency and coverage of smart metering systems. Future developments should focus on improving interoperability, adopting robust security frameworks, and implementing adaptive policies to support the seamless deployment of smart metering solutions. As cities continue to evolve, smart metering infrastructure will be a cornerstone in the transformation towards more sustainable and intelligent urban environments.
References
- Czichos, H.; Saito, T.; Smith, L.E., Springer handbook of metrology and testing, 2nd edition ed.: Springer Science & Business Media, 2011.
- Aleem, S.A.; Abdelaziz, A.Y.; Zobaa, A.F.; Bansal, R., Decision Making Applications in Modern Power Systems: Academic Press, 2019.
- Hurson, A.R., Advances in Computers vol. 116: Academic Press, 2020.
- Lloret, J.; Tomas, J.; Canovas, A.; Parra, L. An integrated IoT architecture for smart metering. IEEE Communications Magazine, vol. 54, pp. 50-57, 2016. [CrossRef]
- Ibhaze, A.E.; Akpabio, M.U.; Akinbulire, T.O. A review on smart metering infrastructure. Int. J. Energy Technology and Policy, vol. 16, p. 277, 2020. [CrossRef]
- Javed, A.R.; Zikria, Y.B.; Rehman, S.U.; Shahzad, F.; Jalil, Z. Future Smart Cities: Requirements, Emerging Technologies, Applications, Challenges, and Future Aspects. 2021.
- Mohammed, F.; Idries, A.; Mohamed, N.; Al-Jaroodi, J.; Jawhar, I. UAVs for smart cities: Opportunities and challenges. in 2014 International Conference on Unmanned Aircraft Systems (ICUAS), 2014, pp. 267-273.
- Khan, M.A.; Alvi, B.A.; Safi, A.; Khan, I.U. Drones for good in smart cities: a review. in International conference on electrical, electronics, computers, communication, mechanical and computing (EECCMC), 2018.
- Talari, S.; Shafie-Khah, M.; Siano, P.; Loia, V.; Tommasetti, A.; Catalão, J.P. A review of smart cities based on the internet of things concept. Energies, vol. 10, p. 421, 2017. [CrossRef]
- Eremia, M.; Toma, L.; Sanduleac, M. The smart city concept in the 21st century. Procedia Engineering, vol. 181, pp. 12-19, 2017. [CrossRef]
- Höjer, M.; Wangel, J. Smart sustainable cities: definition and challenges. in ICT innovations for sustainability, ed: Springer, 2015, pp. 333-349.
- Morris, A.S. Measurement and instrumentation principles. ed: IOP Publishing, 2001.
- Cagno, E.; Micheli, G.J.; Di Foggia, G. Smart metering projects: an interpretive framework for successful implementation. International Journal of Energy Sector Management, 2018. [CrossRef]
- Pitì, A.; Bettenzoli, E.; De Min, M.; Schiavo, L.L. Smart metering: an evolutionary perspective. Paper prepared as application to, 2016.
- Mohassel, R.R.; Fung, A.; Mohammadi, F.; Raahemifar, K. A survey on advanced metering infrastructure. International Journal of Electrical Power & Energy Systems, vol. 63, pp. 473-484, 2014. [CrossRef]
- Al-Ani, K.W.; Abdalkafor, A.S.; Nassar, A.M. Smart city applications: A survey. in Proceedings of the 9th International Conference on Information Systems and Technologies, 2019, pp. 1-4.
- Bellini, P.; Nesi, P.; Pantaleo, G. IoT-enabled smart cities: A review of concepts, frameworks and key technologies. Applied Sciences, vol. 12, p. 1607, 2022. [CrossRef]
- Heng, T.M.; Low, L. The intelligent city: Singapore achieving the next lap: Practitoners forum. Technology Analysis & Strategic Management, vol. 5, pp. 187-202, 1993. [CrossRef]
- Abadía, J.J.P.; Walther, C.; Osman, A.; Smarsly, K. A systematic survey of Internet of Things frameworks for smart city applications. Sustainable Cities and Society, p. 103949, 2022. [CrossRef]
- Law, K.H.; Lynch, J.P. Smart city: Technologies and challenges. IT Professional, vol. 21, pp. 46-51, 2019. [CrossRef]
- Hollands, R.G. Will the real smart city please stand up?: Intelligent, progressive or entrepreneurial?. in The Routledge companion to smart cities, ed: Routledge, 2020, pp. 179-199.
- Kebotogetse, O.; Samikannu, R.; Yahya, A. Review of key management techniques for advanced metering infrastructure. International Journal of Distributed Sensor Networks, vol. 17, p. 15501477211041541, 2021. [CrossRef]
- Tsantilas, S.; Spandonidis, C.; Giannopoulos, F.; Galiatsatos, N.; Karageorgiou, D.; Giordamlis, C. A Comparative Study of Wireless Communication Protocols in a Computer Vision System for improving the Autonomy of the Visually Impaired. Journal of Engineering Science & Technology Review, vol. 13, 2020. [CrossRef]
- Lipošćak, Z.; Bošković, M. Survey of smart metering communication technologies. in Eurocon 2013, 2013, pp. 1391-1400.
- Manju, P.; Pooja, D.; Dutt, V. Drones in smart cities. AI and IoT-Based Intelligent Automation in Robotics, pp. 205-228, 2021.
- Ismael, G.R.J.; Gabriel, G.S.J. A SURVEY ON SMART METERING SYSTEMS USING HUMAN-COMPUTER INTERACTION. Congr. Int. en Ing. Electrónica. Mem. ELECTRO, vol. 42, pp. 78-82, 2020.
- Custers, B. Drones here, there and everywhere introduction and overview. in The future of drone use, ed: Springer, 2016, pp. 3-20.
- Yenne, B., Attack of the drones: a history of unmanned aerial combat: Zenith Imprint, 2004.
- Clarke, R. Understanding the drone epidemic. Computer Law & Security Review, vol. 30, pp. 230-246, 2014. [CrossRef]
- Brown, T.X.; Doshi, S.; Jadhav, S.; Henkel, D.; Thekkekunnel, R.-G. A full scale wireless ad hoc network test bed. in Proc. of International Symposium on Advanced Radio Technologies, Boulder, CO, 2005, pp. 50-60.
- Johnson, D.B.; Maltz, D.A. Dynamic source routing in ad hoc wireless networks. in Mobile computing, ed: Springer, 1996, pp. 153-181. [CrossRef]
- Khare, V.R.; Wang, F.Z.; Wu, S.; Deng, Y.; Thompson, C. Ad-hoc network of unmanned aerial vehicle swarms for search & destroy tasks. in 2008 4th International IEEE Conference Intelligent Systems, 2008, pp. 6-65-6-72.
- Vey, Q.; Pirovano, A.; Radzik, J. Performance analysis of routing algorithms in AANET with realistic access layer. in International Workshop on Communication Technologies for Vehicles, 2016, pp. 175-186.
- Hyland, M.; Mullins, B.E.; Baldwin, R.O.; Temple, M.A. Simulation-based performance evaluation of mobile ad hoc routing protocols in a swarm of unmanned aerial vehicles. in 21st International Conference on Advanced Information Networking and Applications Workshops (AINAW’07), 2007, pp. 249-256.
- Mahmoud, M.S.B.; Larrieu, N. An ADS-B based secure geographical routing protocol for aeronautical ad hoc networks. in 2013 IEEE 37th annual computer software and applications conference workshops, 2013, pp. 556-562.
- Shirani, R.; St-Hilaire, M.; Kunz, T.; Zhou, Y.; Li, J.; Lamont, L. The performance of greedy geographic forwarding in unmanned aeronautical ad-hoc networks. in 2011 Ninth Annual Communication Networks and Services Research Conference, 2011, pp. 161-166.
- Hadiwardoyo, S.A.; Dricot, J.-M.; Calafate, C.T.; Cano, J.-C.; Hernandez-Orallo, E.; Manzoni, P. UAV mobility model for dynamic UAV-to-car communications. in Proceedings of the 16th ACM International Symposium on Performance Evaluation of Wireless Ad Hoc, Sensor, & Ubiquitous Networks, 2019, pp. 1-6.
- Nawaz, H.; Ali, H.M. A study of mobility models for UAV communication networks. 3c Tecnología: glosas de innovación aplicadas a la pyme, vol. 8, pp. 276-297, 2019. [CrossRef]
- Bettstetter, C.; Hartenstein, H.; Pérez-Costa, X. Stochastic properties of the random waypoint mobility model. Wireless networks, vol. 10, pp. 555-567, 2004. [CrossRef]
- Biomo, J.-D.M.M.; Kunz, T.; St-Hilaire, M. An enhanced Gauss-Markov mobility model for simulations of unmanned aerial ad hoc networks. in 2014 7th IFIP Wireless and Mobile Networking Conference (WMNC), 2014, pp. 1-8. [CrossRef]
- Bouachir, O.; Abrassart, A.; Garcia, F.; Larrieu, N. A mobility model for UAV ad hoc network. in 2014 international conference on unmanned aircraft systems (ICUAS), 2014, pp. 383-388.
- Kuiper, E.; Nadjm-Tehrani, S. Mobility models for UAV group reconnaissance applications. in 2006 International Conference on Wireless and Mobile Communications (ICWMC’06), 2006, pp. 33-33.
- Sánchez-García, J.; García-Campos, J.M.; Toral, S.; Reina, D.; Barrero, F. A self organising aerial ad hoc network mobility model for disaster scenarios. in 2015 international conference on developments of E-systems engineering (DeSE), 2015, pp. 35-40.
- Chmaj, G.; Selvaraj, H. Distributed processing applications for UAV/drones: a survey. in Progress in Systems Engineering, ed: Springer, 2015, pp. 449-454.
- Bekmezci, I.; Sahingoz, O.K.; Temel, Ş. Flying ad-hoc networks (FANETs): A survey. Ad Hoc Networks, vol. 11, pp. 1254-1270, 2013. [CrossRef]
- Gupta, L.; Jain, R.; Vaszkun, G. Survey of important issues in UAV communication networks. IEEE Communications Surveys & Tutorials, vol. 18, pp. 1123-1152, 2015. [CrossRef]
- Shah, B.; Kim, K.-I. A survey on three-dimensional wireless ad hoc and sensor networks. International Journal of Distributed Sensor Networks, vol. 10, p. 616014, 2014. [CrossRef]
- Ghosh, S.; Nayak, A. ACPM: An associative connectivity prediction model for AANET. in 2016 Eighth International Conference on Ubiquitous and Future Networks (ICUFN), 2016, pp. 605-610.
- Shen, C.; Chang, T.-H.; Gong, J.; Zeng, Y.; Zhang, R. Multi-UAV interference coordination via joint trajectory and power control. IEEE Transactions on Signal Processing, vol. 68, pp. 843-858, 2020. [CrossRef]
- Alejo, D.; Cobano, J.A.; Heredia, G.; Ollero, A. Collision-free 4D trajectory planning in unmanned aerial vehicles for assembly and structure construction. Journal of Intelligent & Robotic Systems, vol. 73, pp. 783-795, 2014. [CrossRef]
- ARCAS. (2020, 7 April). The ARCAS project. Available: http://www.arcas-project.eu/.
- Srinivasan, S.; Latchman, H.; Shea, J.; Wong, T.; McNair, J. Airborne traffic surveillance systems: video surveillance of highway traffic. in Proceedings of the ACM 2nd international workshop on Video surveillance & sensor networks, 2004, pp. 131-135.
- Ro, K.; Oh, J.-S.; Dong, L. Lessons learned: Application of small uav for urban highway traffic monitoring. in 45th AIAA aerospace sciences meeting and exhibit, 2007, p. 596. [CrossRef]
- Granlund, G.; Nordberg, K.; Wiklund, J.; Doherty, P.; Skarman, E.; Sandewall, E. Witas: An intelligent autonomous aircraft using active vision. in UAV 2000 International Technical Conference and Exhibition, Paris, France, June 2000, 2000.
- Yanmaz, E.; Guclu, H. Stationary and mobile target detection using mobile wireless sensor networks. in 2010 INFOCOM IEEE Conference on Computer Communications Workshops, 2010, pp. 1-5.
- Gil, A.E.; Passino, K.M.; Jr, J.B.C. Stable cooperative surveillance with information flow constraints. IEEE Transactions on Control Systems Technology, vol. 16, pp. 856-868, 2008. [CrossRef]
- Olsson, P.-M.; Kvarnström, J.; Doherty, P.; Burdakov, O.; Holmberg, K. Generating UAV communication networks for monitoring and surveillance. in 2010 11th international conference on control automation robotics & vision, 2010, pp. 1070-1077.
- Schleich, J.; Panchapakesan, A.; Danoy, G.; Bouvry, P. UAV fleet area coverage with network connectivity constraint. in Proceedings of the 11th ACM international symposium on Mobility management and wireless access, 2013, pp. 131-138.
- Corcoran, M. Drone Journalism: Newsgathering applications of Unmanned Aerial Vehicles (UAVs) in covering conflict, civil unrest and disaster. Flinders Univ. Adelaide, vol. 201, p. 202014, 2014.
- Abdelkader, M.; Shaqura, M.; Claudel, C.G.; Gueaieb, W. A UAV based system for real time flash flood monitoring in desert environments using Lagrangian microsensors. in 2013 International conference on unmanned aircraft systems (ICUAS), 2013, pp. 25-34.
- Casbeer, D.W.; Beard, R.W.; McLain, T.W.; Li, S.-M.; Mehra, R.K. Forest fire monitoring with multiple small UAVs. in Proceedings of the 2005, American Control Conference, 2005., 2005, pp. 3530-3535.
- Zeng, Y.; Xu, J.; Zhang, R. Energy minimization for wireless communication with rotary-wing UAV. IEEE Transactions on Wireless Communications, vol. 18, pp. 2329-2345, 2019. [CrossRef]
- Augugliaro, F.; Mirjan, A.; Gramazio, F.; Kohler, M.; D’Andrea, R. Building tensile structures with flying machines. in 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2013, pp. 3487-3492.
- Lindsey, Q.; Mellinger, D.; Kumar, V. Construction with quadrotor teams. Autonomous Robots, vol. 33, pp. 323-336, 2012. [CrossRef]
- Willmann, J.; Augugliaro, F.; Cadalbert, T.; D’Andrea, R.; Gramazio, F.; Kohler, M. Aerial robotic construction towards a new field of architectural research. International journal of architectural computing, vol. 10, pp. 439-459, 2012. [CrossRef]
- Tomic, T.; Schmid, K.; Lutz, P.; Domel, A.; Kassecker, M.; Mair, E., et al. Toward a fully autonomous UAV: Research platform for indoor and outdoor urban search and rescue. IEEE robotics & automation magazine, vol. 19, pp. 46-56, 2012. [CrossRef]
- Waharte, S.; Trigoni, N.; Julier, S. Coordinated search with a swarm of UAVs. in 2009 6th ieee annual communications society conference on sensor, mesh and ad hoc communications and networks workshops, 2009, pp. 1-3.
- Berger, J.; Happe, J. Co-evolutionary search path planning under constrained information-sharing for a cooperative unmanned aerial vehicle team. in IEEE Congress on Evolutionary Computation, 2010, pp. 1-8.
- Goodrich, M.A.; Morse, B.S.; Gerhardt, D.; Cooper, J.L.; Quigley, M.; Adams, J.A., et al. Supporting wilderness search and rescue using a camera-equipped mini UAV. Journal of Field Robotics, vol. 25, pp. 89-110, 2008. [CrossRef]
- Molina, P.; Colomina, I.; Vitoria, T.; Freire, P.; Skaloud, J.; Kornus, W., et al. CLOSE-SEARCH: ACCURATE AND SAFE EGNOS-SOL NAVIGATION FOR UAV-BASED LOW-COST SAR OPERATIONS. 2011.
- Ghafoor, S.; Sutton, P.D.; Sreenan, C.J.; Brown, K.N. Cognitive radio for disaster response networks: survey, potential, and challenges. IEEE Wireless Communications, vol. 21, pp. 70-80, 2014. [CrossRef]
- Puri, A. A survey of unmanned aerial vehicles (UAV) for traffic surveillance. Department of computer science and engineering, University of South Florida, pp. 1-29, 2005.
- Hormigo, T. A micro-UAV system for forest management. 2013. [CrossRef]
- Zhao, N.; Lu, W.; Sheng, M.; Chen, Y.; Tang, J.; Yu, F.R., et al. UAV-assisted emergency networks in disasters. IEEE Wireless Communications, vol. 26, pp. 45-51, 2019. [CrossRef]
- Kunovjanek, M.; Wankmüller, C. Containing the COVID-19 pandemic with drones-Feasibility of a drone enabled back-up transport system. Transport Policy, vol. 106, pp. 141-152, 2021. [CrossRef]
- Project, C.2006, 8 May). Real-time coordination and control of multiple heterogeneous unmanned aerial vehicles. Available: http://www.comets-uavs.org/.
- Sujit, P.; Ghose, D. Search using multiple UAVs with flight time constraints. IEEE Transactions on Aerospace and Electronic Systems, vol. 40, pp. 491-509, 2004. [CrossRef]
- Berger, R.2020, 3 April). CARGO DRONES: THE FUTURE OF PARCEL DELIVERY. Available: https://www.rolandberger.com/en/Point-of-View/Cargo-drones-.
- DHL. (2020, 29 March). UNMANNED AERIAL VEHICLES Ready for Take-off? Available: https://www.dhl.com/global-en/home/insights-andinnovation/thought-leadership/trend-reports/unmanned-aerialvehicles.
- html.
- Cargo, U.2020, 2 April). Pizza Pie in the Sky! – A Brief History of the Goal to Use Drones to Deliver Pizzas. Available: http://unmannedcargo.org/pizza-pie-in-the-sky-the-use-of-dronesto-deliver-pizzas-commercially/.
- ADVERTISER, T.M.2020, 5 April). BrewDog ‘exploring drone delivery’ in UK. Available: https://www.morningadvertiser.co.uk/Article/2020/06/17/BrewDog-exploring-drone-delivery-in-UK.
- D’Andrea, R. Guest editorial can drones deliver?. IEEE Transactions on Automation Science and Engineering, vol. 11, pp. 647-648, 2014. [CrossRef]
- Ackerman, E. Matternet wants to deliver meds with a network of quadrotors. Automaton blog on IEEE Spectrum, 2011.
- Kuru, K.; Ansell, D.; Khan, W.; Yetgin, H. Analysis and optimization of unmanned aerial vehicle swarms in logistics: An intelligent delivery platform. Ieee Access, vol. 7, pp. 15804-15831, 2019. [CrossRef]
- Kim, K.-I.; Hyeon, S.; Yang, S.; Yi, J. Development of simulator for aircraft ad hoc networks. in 2011 IEEE/AIAA 30th Digital Avionics Systems Conference, 2011, pp. 5B1-1-5B1-8.
- Qi, F.; Zhu, X.; Mang, G.; Kadoch, M.; Li, W. UAV network and IoT in the sky for future smart cities. IEEE Network, vol. 33, pp. 96-101, 2019. [CrossRef]
- Kaniewski, P.; Kraszewski, T. Drone-based system for localization of people inside buildings. in 2018 14th International Conference on Advanced Trends in Radioelecrtronics, Telecommunications and Computer Engineering (TCSET), 2018, pp. 46-51.
- Paliotta, C.; Ening, K.; Albrektsen, S.M. Micro indoor-drones (mins) for localization of first responders. 2021.
- Meshcheryakov, R.; Trefilov, P.; Chekhov, A.; Diane, S.; Rusakov, K.; Lesiv, E., et al. An application of swarm of quadcopters for searching operations. IFAC-PapersOnLine, vol. 52, pp. 14-18, 2019. [CrossRef]
- Shinde, S.; Kothari, A.; Gupta, V. YOLO based human action recognition and localization. Procedia computer science, vol. 133, pp. 831-838, 2018. [CrossRef]
- Ausonio, E.; Bagnerini, P.; Ghio, M. Drone swarms in fire suppression activities: a conceptual framework. Drones, vol. 5, p. 17, 2021. [CrossRef]
- Fabra, F.; Zamora, W.; Reyes, P.; Sanguesa, J.A.; Calafate, C.T.; Cano, J.-C., et al. MUSCOP: Mission-based UAV swarm coordination protocol. IEEE Access, vol. 8, pp. 72498-72511, 2020. [CrossRef]
- Wubben, J.; Fabra, F.; Calafate, C.T.; Cano, J.-C.; Manzoni, P. A novel resilient and reconfigurable swarm management scheme. Computer Networks, vol. 194, p. 108119, 2021. [CrossRef]
- Kumar, A.; Sharma, K.; Singh, H.; Naugriya, S.G.; Gill, S.S.; Buyya, R. A drone-based networked system and methods for combating coronavirus disease (COVID-19) pandemic. Future Generation Computer Systems, vol. 115, pp. 1-19, 2021. [CrossRef]
- Siemiatkowska, B.; Stecz, W. A framework for planning and execution of drone swarm missions in a hostile environment. Sensors, vol. 21, p. 4150, 2021. [CrossRef]
- Ali, Q.I. Design, implementation & optimization of an energy harvesting system for VANETs’ road side units (RSU). IET Intelligent Transport Systems, vol. 8, no. 3, pp. 298-307, 2014. [CrossRef]
- Ali, Q.I. An efficient simulation methodology of networked industrial devices. in Proc. 5th Int. Multi-Conference on Systems, Signals and Devices, 2008, pp. 1-6.
- Ali, Q.I. Security issues of solar energy harvesting road side unit (RSU). Iraqi Journal for Electrical & Electronic Engineering, vol. 11, no. 1, 2015. [CrossRef]
- Ali, Q.I. Securing solar energy-harvesting road-side unit using an embedded cooperative-hybrid intrusion detection system. IET Information Security, vol. 10, no. 6, pp. 386-402, 2016. [CrossRef]
- Ibrahim, Q. Design & Implementation of High-Speed Network Devices Using SRL16 Reconfigurable Content Addressable Memory (RCAM). Int. Arab. J. e Technol., vol. 2, no. 2, pp. 72-81, 2011.
- Alhabib, M.H.; Ali, Q.I. Internet of autonomous vehicles communication infrastructure: a short review. Diagnostyka, vol. 24, 2023. [CrossRef]
- Ali, Q.I. Realization of a robust fog-based green VANET infrastructure. IEEE Systems Journal, vol. 17, no. 2, pp. 2465-2476, 2022. [CrossRef]
- Ali, Q.I.; Jalal, J.K. Practical design of solar-powered IEEE 802.11 backhaul wireless repeater. in Proc. 6th Int. Conf. on Multimedia, Computer Graphics and Broadcasting, 2014.
Figure 1.
Elements of a Measuring Instrument.

Figure 2.
Smart city architecture.
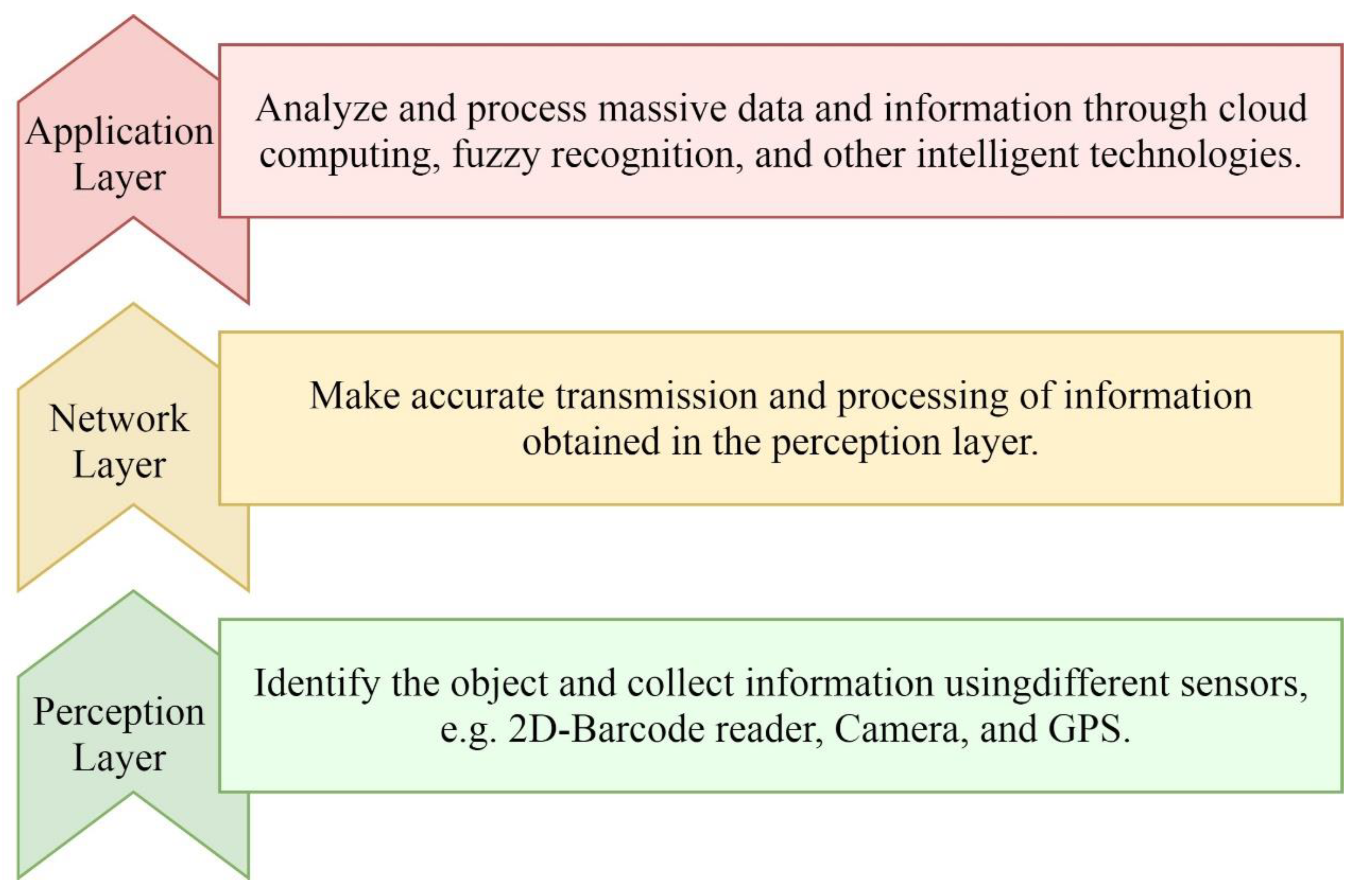
Figure 3.
Different domains and applications in smart cities.
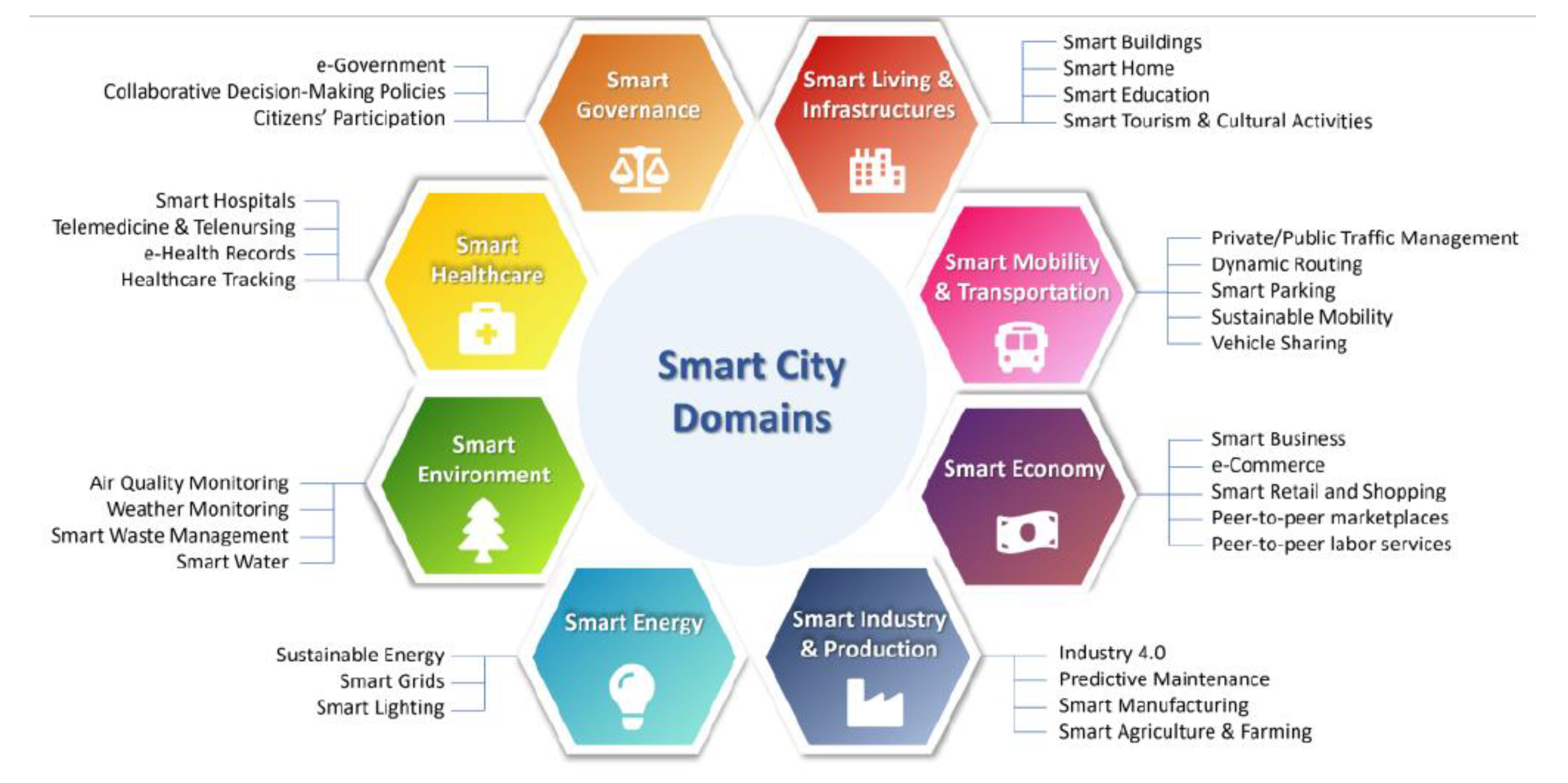
Figure 4.
Smart metering infrastructure: Schematic representation.
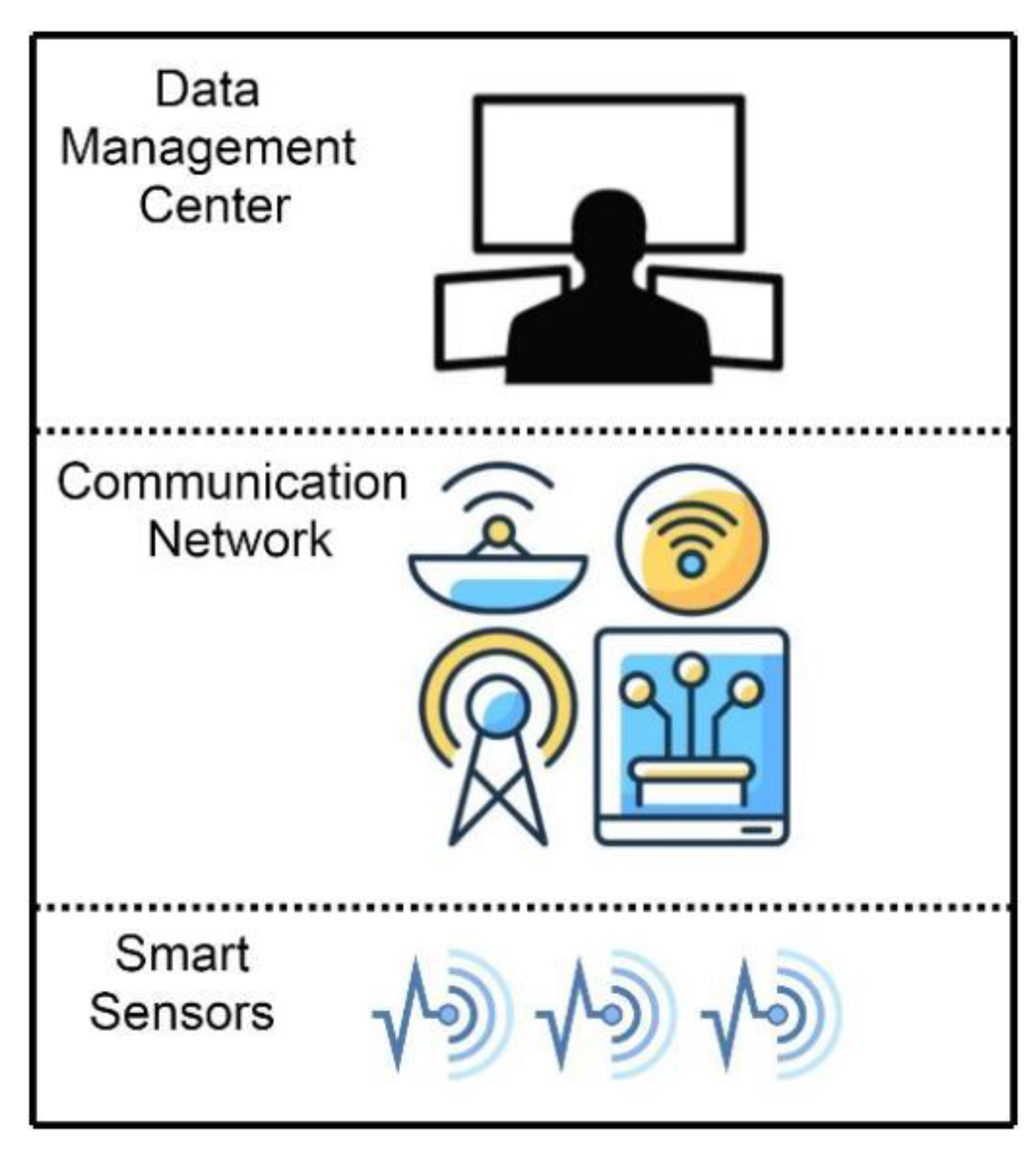
Figure 5.
Smart meter features.
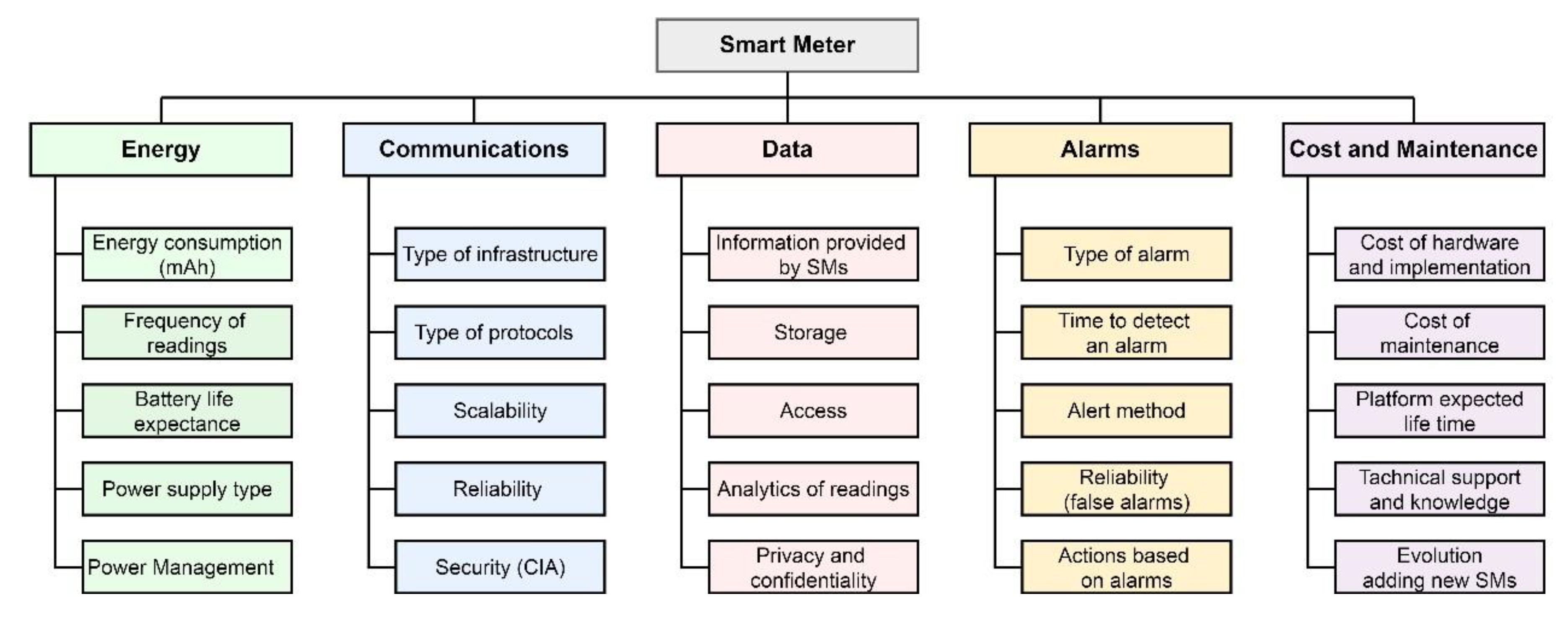
Figure 6.
UAV Performance Analysis.
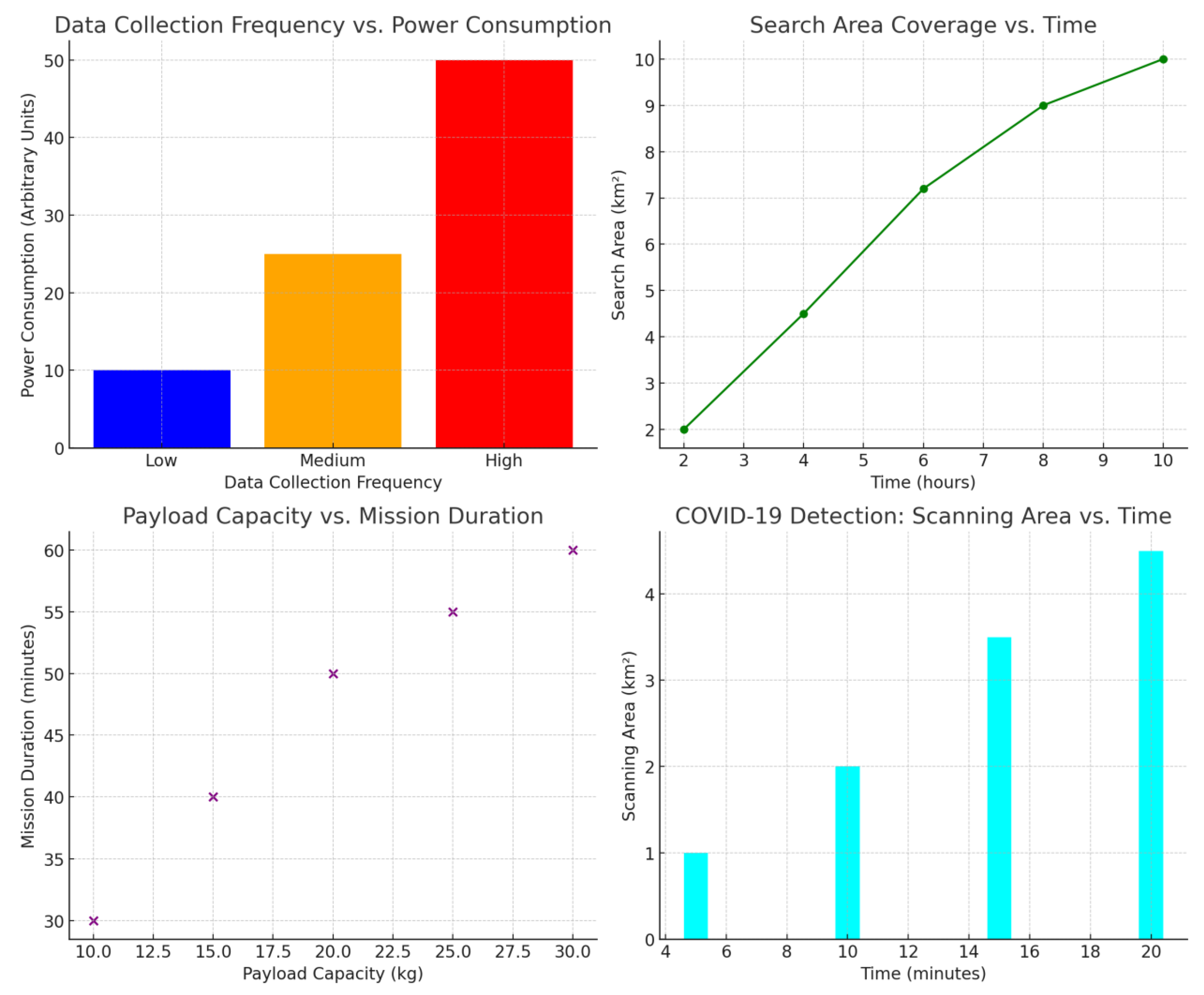
Table 1.
Comparison of different wireless technologies.
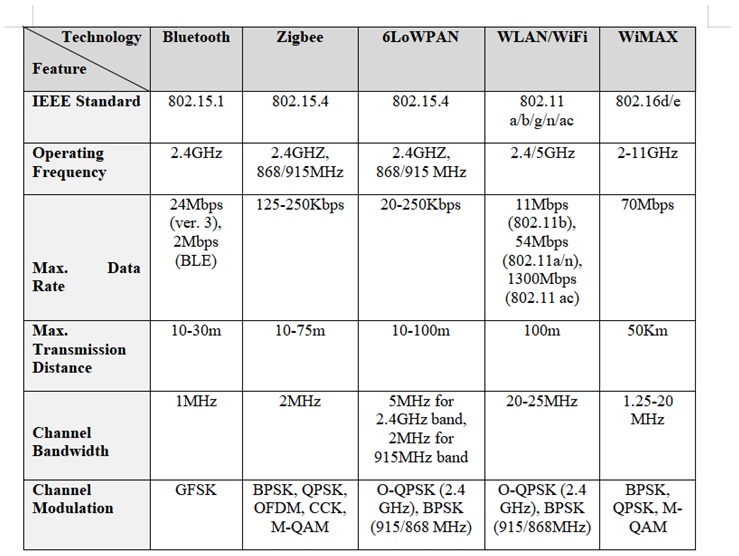 |
Table 2.
General UAV review comparative study.
| Paper Title | Objective | Methodology | Conclusion | Future Work |
|---|---|---|---|---|
| Development of a Simulator for Aircraft Ad Hoc Networks [85] | Improving current simulation tools to achieve more reliable AANET outcomes. | Enhancing existing AANET simulation frameworks. | Identified key obstacles in simulator development. | Proposed potential improvements and additional functionalities to refine current simulators. |
| Secure Geographical Routing Protocol for AANET using ADS-B [35] | Addressing security challenges in AANET routing. | Combining Automatic Dependent Surveillance-Broadcast (ADS-B) with GPSR. | The proposed protocol provides cost-effective cryptographic solutions to protect aircraft position data and transmitted packets. | Strengthening the hybrid ADS-B/GPSR security model by integrating additional security mechanisms. |
| UAV Ad Hoc Network Mobility Model [41] | Investigating real-world AANET mobility challenges. | Paparazzi Mobility Model (PPRZM) and Random Waypoint (RWP) model. | PPRZM exhibits behavior closer to actual Paparazzi movement patterns compared to RWP. | Evaluating PPRZM in diverse scenarios and benchmarking it against other UAV mobility models. |
| Self-Organizing Aerial Ad Hoc Network for Disaster Response [43] | Developing a flexible airborne network for disaster relief. | Utilizing Jaccard distance for mobility modeling. | The mobility model enables drones to disperse effectively from a central disaster point, improving coverage for affected individuals. | Applying computational intelligence techniques to optimize Jaccard threshold selection for maximizing victim coverage. |
| Associative Connectivity Prediction Model (ACPM) for AANET [48] | Reducing network setup time and improving self-healing capabilities. | FCM clustering approach. | ACPM operates within a hybrid AANET topology to enhance network awareness, monitor end-to-end connectivity, and assist network agents. | Increasing network stability by improving aircraft connectivity levels. |
| Optimizing UAV Swarm Logistics: An Intelligent Delivery Framework [84] | Analyzing and optimizing UAV delivery systems. | Implementing dynamic multiple assignments in multi-dimensional space (dMAiMD), along with the Hungarian algorithm and Cross-Entropy Monte Carlo methods. | The Cross-entropy Monte Carlo method is introduced as a novel approach for determining optimal UAV delivery routes, improving autonomous air traffic control. | Conducting real-world experiments and adopting the Internet of Drones (IoD) technology for a comprehensive cyber-physical delivery framework. |
| UAV and IoT Integration for Future Smart Cities [86] | Establishing a 5G-enabled drone network to address the leader UAV bottleneck issue. | Enhancing leader UAV antenna configurations and leveraging multiple millimeter-wave ground station connections for better handover management. | The proposed architecture manages swarm coordination, navigation, task allocation, and data processing, positioning the leader UAV as a network gateway and control center. | Future research should focus on optimizing the leader UAV’s altitude and trajectory prediction. |
| UAV-Assisted Communication Networks for Disaster Management [74] | Overcoming environmental and spatial communication barriers in disaster scenarios. | Joint Trajectory and Scheduling Optimization. | Deploying drones for emergency communication improves network efficiency during disaster situations. | Further exploration is needed in managing interference and minimizing energy consumption when scaling up drone deployments. |
| Energy-Efficient Wireless Communication with Rotary-Wing UAVs [62] | Minimizing UAV energy consumption while ensuring adequate communication for ground nodes. | Optimizing mission duration, trajectory, and communication scheduling. | The proposed strategy outperforms conventional benchmarks in rotary-wing UAV wireless communication systems. | Future studies should refine trajectory and altitude adjustments and develop more comprehensive power consumption models. |
| Coordinated Multi-UAV Interference Management via Joint Trajectory and Power Control [49] | Mitigating severe cross-link interference in UAV networks. | Joint trajectory and power control (TPC). | The SCA algorithm continuously adapts the UAV’s trajectory and transmission power in each cycle. By using parallel TPC and segment-wise strategies, it enhances network throughput while also cutting down on computation time. | Future research should focus on developing an adaptive UAV framework that switches between spectrum sharing and FDMA with minimal power usage by including multi-antenna ground terminals. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



