
Submitted:
17 May 2024
Posted:
20 May 2024
You are already at the latest version
Abstract
In this article it is shown, first, that a change of basis in Minkowski space is equivalent to a change of basis in Euclidean space if a basis element is replaced by its dual element, constituting a mixed basis set. Second, that such mixed bases can be interpreted as a measurement system used by local, flat observers whose direct distance measurements are restricted to an (n−1)-dimensional submanifold in an n-dimensional Euclidean space. Combining these steps, it is concluded that a local, flat observer in a four-dimensional Euclidean space measures a Minkowski spacetime. This interpretation could be useful for theories in special relativity and related fields that rely on spacetime concepts, as it offers a more intuitive geometric understanding of the Minkowski metric.
Keywords:
Minkowski space
; spacetime
; contravariant transformation
; mixed basis
; geometric interpretation
; special relativity
1. Introduction
Relativistic covariant theories contain an intrinsic difficulty in the interpretation of length measurements. Consider the scalar product on a Minkowski space , defined by:
This measurement rule is not positive definite, which implies that the norm induced by the scalar product can assume imaginary values (Figure 1). Therefore imaginary distances between two points can occur in this vector space, and there is no intuitive geometric interpretation of such occurrences. A direct trigonometric interpretation in the Euclidean sense is not possible.
This is an unsatisfactory situation for concepts that seek geometric interpretations of spacetime (e.g. as in [1] and references therein, [2,3,4,5],). Moreover, any framework that relies on spacetime concepts could benefit from a new geometric interpretation of the Minkowski metric by making complex notions more accessible and visually understandable.
In order to develop an interpretation of the negative sign in the metric tensor (Eq. 1), the following steps are performed:
It is first shown in Section 2 that the Minkowski metric could appear when a four-dimensional Euclidean space is measured with a mixed basis . As a possible interpretation, Section 3 considers the hypothesis of a flat observer that has no spatial extent in one dimension, but who may still be able to measure the additional dimension indirectly by using a contravariantly transforming scale.
2. Mapping between Spaces with Mixed Covariant and Contravariant Bases
2.1. Basics and Notation
The following proof requires a precise notation for co- and contravariant transforming objects. Since there are different conventions, a brief summary of the nomenclature used in this article is given.
Co- and contravariant vectors are written in bold, second order tensors are written in bold and have capital letters; Greek indexes run from 0 to 3, Latin indexes from 1 to 3, unless otherwise noted.
Let be a four-dimensional Euclidean vector space with states . These states are expressed as a linear combination of a canonical basis with elements from the dual space (orig. [6], available at [7]; introductions e.g. in [8,9]):
The scalar coefficients are called the coordinates of state with respect to the basis . They can be summarized as a coordinate vector (Eq. 2 last term). The coordinates are generated by the dual basis , which is defined by the Euclidean metric tensor :
Analogously, any dual state can be expressed with respect to a canonical dual basis:
The coefficients are called dual coordinates of the dual state with respect to the dual basis . They can be consolidated as a dual coordinate vector (Eq. 4 last row). Thus, scalar and tensor products can be defined directly:
The state does not vary when there’s a change of basis. For this to be the case, the coordinates must change inversely to the basis.
Orientation preserving changes of orthonormal bases in four-dimensional Euclidean space are isomorphic to the Lie-group , which can be represented by the special orthogonal matrices of fourth order . Consider the change of basis from to . The elements of the new basis can be written as a linear combination of the elements of the old basis:
This translates into the following transformation rule for coordinate vectors (overall and componentwise):
which in the case of orthogonal bases becomes:
The transpose of matrix is expressed by the index interchange in the last line of Eq. 8. The components of the transformation matrix and its inverse are:
It is said that the basis transforms covariantly, whereas the coordinates transform contravariantly. As required, the state remains unchanged:
2.2. Definitions
The transformation properties of mixed bases consisting of co- and contravariant transforming elements are examined. For this purpose, the following definitions are introduced:
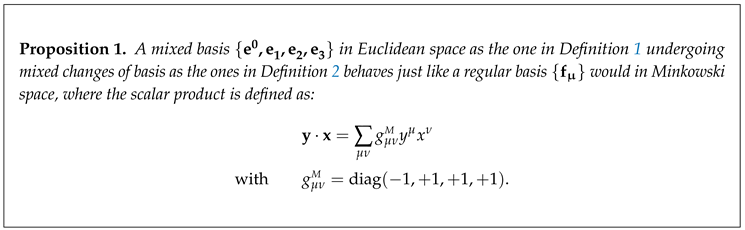
Definition 1
(Mixed basis). A mixed basis is defined as a basis where all elements belong to the canonical basis, except one which is replaced by its dual element, with .
Definition 2
(Mixed change of basis). Let a mixed change of basis be the change of basis between two mixed bases and .
It is clear that mixed bases as in Definition 1 do not change like regular bases in Euclidean space; nor can the scalar or tensor product of the Euclidean space be applied to the mixed bases. The task is to define a vector space in which the mixed bases can be described in a coherent mathematical manner. Hence the following proposition:
2.3. Proposition and Proof
Proof.
Let be an Euclidean space with canonical basis and dual basis ; a Minkowski space with orthonormalized basis . It is to be shown that, upon a change of basis, the element of the dual Euclidean basis transforms like the element of the Minkowski basis.
The orientation preserving changes of basis in Euclidean space can be expressed as an exponential series:
Where t is the transformation parameter and is a skew symmetric matrix (). The skew symmetry of these matrices is what leads to the orthogonality of the finite transformations and the coordinate vectors to change with the transposed transformation rule (Eq. 8).
The matrices build, together with the commutator , the Lie-algebra of the Lie-group : the algebra that generates the infinitesimal orientation preserving coordinate transformations in , which through exponential mapping span the whole Lie-group (for introductions see e.g. [10,11]).
In the case of infinitesimal transformations () it is sufficient to only consider the first terms of the exponential series. The special role of the Lie-algebra is seen here:
The elements of the Lie-algebra can once more be expressed as a linear combination of a basis, which in the case of consists of six skew symmetrical matrices, e.g.:
and therefore
To apply a change of the mixed basis, a transformation rule has to be constructed which transforms the element of the basis with the same coefficients that a normalized coordinate vector is transformed with. Using transformation rule Eq. 7 and definition Eq. 14, the infinitesimal change of coordinate vector can be written as follows:
The (pseudo-)inverse denotes the inverse of on the subspace spanned by and . In componentwise notation this reads:
Eq. 18 is rearranged to show the change caused by the transformation. It holds for the individual components:
On the other hand, the transformation rule to obtain is given by (from Eq. 6):
Rearrangement of Eq. 20 provides the change induced by the transformation:
which results in component notation:
Sought is an infinitesimal basis transformation with which the individual entries of change of the vector (Eq. 19) coincide with the entries of change of the basis vector (Eq. 22). In order for this to be true for all transformations, the comparison of these two equations yields that the entries of the first row of matrices must be equal to the corresponding entries of their inverted matrices .
As expected, this condition cannot be fulfilled by regular (non-trivial) Euclidean transformations, since in this case the are skew symmetric and orthogonal, and thus . To nonetheless find a change of basis which has the same effect on as it has on , one must depart from changes of basis in the ordinary Euclidean sense and search for a new set of transformations.
In order for the new base transformations to be useful, they must again function as a Lie algebra, such that finite transformations can be generated from the infinitesimal transformations using the exponential map. The starting point is thus given by a new set of infinitesimal generators (marked with a bar) of the same form as in Eq. 16:
According to the previous considerations, different elements of the basis are sought, which are their own inverses in their spanned subspace:
Since this condition alone does not give a unique form for the matrices , some additional requirements can be applied. The transformation of the other basis vectors should remain the same as before, thus the coefficients in columns stay unchanged with respect to Eq. 14:
Furthermore, volume conservation can be preserved:
Considering conditions Eqs. 24, 25 and 26, the following new transformation matrices can be constructed:
The new elements retain the matrix form of the transformations, yet without orthogonality, since the skew symmetry of the Lie-algebra’s elements had to be abandoned. The generators Eq. 27 are inserted back into Eq. 23, which now describes the infinitesimal basis transformations between mixed bases according to Definition 2.
On the other hand, the unchanged matrices (Eq. 13) build, together with the new matrices (Eq. 27) and the commutator as a Lie bracket, the Lie-algebra with elements . By means of the exponential mapping this Lie-Algebra translates into the proper Lorentz group , where:
Yet the elements of the proper Lorentz group are defined as those orientation preserving changes of basis taking place in the Minkowski space , with metric tensor (see e.g. [12]).
The determined infinitesimal transformation rule according to Eq. 23 for mixed bases in Euclidean space as specified in Definition 1 thus corresponds exactly to the infinitesimal transformation rule for a canonical base of Minkowski space. Moreover, since only the basis vector has been changed, the Euclidean space with mixed basis can be directly substituted by a Minkowski space with canonical basis:
transforms like the element of the Minkowski basis and vice versa, and the discovered transformation is equivalent to a regular change of basis in Minkowski space.
3. Interpretation as Distance Measurement by a Flat Observer
The transition between co- and contravariant measurement scales outlined in Section 2 is a tangible geometric operation that can be further interpreted. One possible interpretation is detailed in this section.
3.1. Definitions
Definition 3
(Local observer). Let be a four-dimensional Euclidean vector space with the metric tensor and the metric
In this space, a local observer is defined as a device that performs distance measurements within the infinitesimal neighborhood ε of a point P using metric Eq. 30.
Definition 4
(Flat observer). Let M be a be a connected, analytic submanifold of this vector space with .
A flat observer is defined as a local observer at point according to Definition 3, with the restriction that the flat observer as well as its measurement neighborhood are elements of M. Thus and .
Corollary 1.
The measurement neighborhood of a flat observer is defined through the tangential space of the submanifold M at the position of observer .
Since M is analytical and connected, a canonical basis can be found for the flat observer, where is normal to M.
Definition 5
(Measurable objects). Measurable objects are constructs which trigger a measurable signal that can be evaluated by a local observer according to Definition 3.
Corollary 2.
According to Eq. 30, the only quantities which can be inputted in a measurement procedure carried out by a local observer are vectors, thus measurable objects according to Definition 5 must be inherently defined as vectorial quantities.
3.2. Proposition and Proof
By Definition 4, a flat observer cannot directly take distance measurements along the direction normal to its submanifold parallel to . Under certain conditions, however, indirect distance measurements in this direction may become possible:
Lemma 1.
A flat observer according to Definition 4 can make distance measurements in the direction if:
- A)
- A measurable object according to Definition 5 with spatial extent in the direction is present, it intersects the measurement neighborhood of the flat observer , and
- B)
- there is relative displacement between and the object in the direction.
Proof.
- A)
-
As per Definition 3, to perform any measurement, the metric in Eq. 30 must be used. Measurable objects are defined as the input quantities for this metric. They are also the only way the flat observer can measure distances in the direction, since a basis vector is not available. Hence, for the measurement in this direction, a measurable object must be present.To measure a distance other than zero in some direction, the two vectors inserted into the metric must differ in the coordinate of interest. A length normal to M can only be defined by two vectors , with different values in the component. This difference between the two vectors can just as well be defined as a measurable object with a non zero spatial extent in the direction. Finally, a flat observer can only perform measurements in its neighborhood , thus the measurable object must intersect that neighborhood.
- B)
- Since the flat observer only has the overview of one single coordinate in the direction, a relative shift between and is necessary to observe at least two different coordinate values.
For further illustration of this concept, see the three-dimensional schematic example in Figure 2.
Lemma 2.
The measurement of a distance normal to the submanifold according to Lemma 1 by a flat observer according to Definition 4 produces a contravariantly transforming scale.
Proof.
For a flat observer, the only measurable relation to the outside of its submanifold M is given by the measurable object . The basis vector is by Definition 4 not available for measurement.
Since there are no further references, a standard length in the direction can only be defined using object , and any additional distance measurement is subsequently quantified as multiples of this standard length. However, the measured standard length used as the basis element and the resulting scale transform contravariantly, since a measurable object is a vectorial quantity, as stated in Corollary 2.
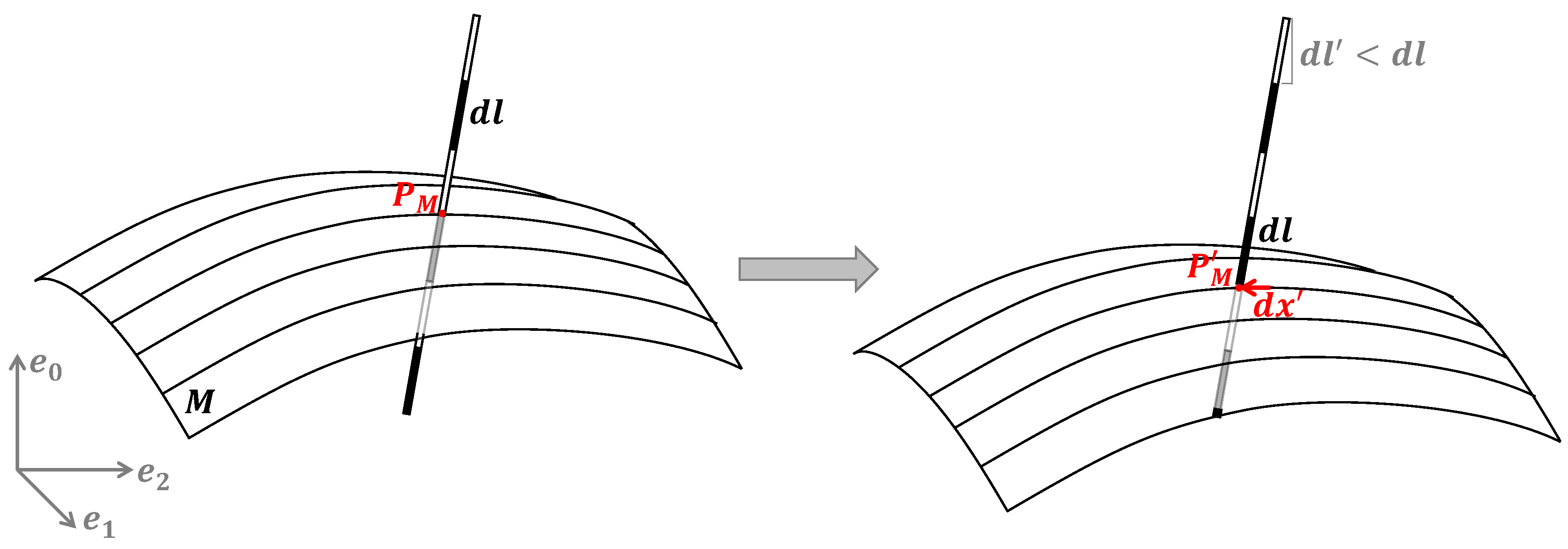
The effect of a contravariant measurement is illustrated in Figure 3 with a three-dimensional example.
These considerations lead to the following proposition:

Proof.
The proof is divided into two parts. The first part is to show that the Minkowski metric can be understood as a measurement rule in an Euclidean space if a mixed basis is used when carrying out the measurement. This part was proven in Section 2.3.
The second part is covered by Lemma 2, which shows that a flat observer uses such a mixed basis, where the scale for distance measurement is covariant within its submanifold and contravariant when normal to its submanifold. Thus, the argumentation is consistent and Proposition 2 is proven.
4. Conclusions
In this article it is shown that local, flat observers without extension in one direction of an Euclidean space can measure the extra dimension, provided there is an interaction with other objects possessing extension in that very direction.
To achieve this, the flat observer employs a measurement rule that uses mixed transforming basis elements . It is shown that the thereby formed mixed basis transforms like a regular basis of Minkowski space.
This derivation allows the interpretation of the mapping between Minkowski and Euclidean spaces in physical contexts as a change of perspective between flat and local observers.
More generally, this rationale provides a general physical interpretation for the sign inversion of individual or all entries of the metric tensor. The sign inversion corresponds to the role reversal between physical objects (vectors) and the abstract measurement scale (covectors).
Acknowledgments
My thanks go to Rudolf Fehlmann for the countless, fruitful discussions and in particular for his support in the structuring of my work. Likewise, my thanks go to Benjamin Arner for the translations into English, as well as to Nelson Bolivar and Ernesto Fuenmayor for the pre-publication review. Then to my father for the editing, plus everyone else surrounding me, my family and friends, for the ongoing support.
References
- T.G. Tenev, M.F. Horstemeyer, The Mechanics of Spacetime – A Solid Mechanics Perspective on the Theory of General Relativity. International Journal of Modern Physics D 2018, 27, 1850083. [CrossRef]
- L. Levrino, A. Tartaglia, From the elasticity theory to cosmology and vice versa. A. Sci.ChinaPhys. Mech. Astron. 2014, 57, 597. [CrossRef]
- R. F. Klinkhamer, G. Volovik, Tetrads and q-theory. arXiv:1812.07046 [gr-qc] 2018.
- H. Kleinert, J. Zaanen, Nematic world crystal model of gravity explaining absence of torsion in spacetime. Physics Letters A 2004, 324, 361-365. [CrossRef]
- Q. Si-ming, W. You-lin, T4 Gauge Theory of Gravity and New General Relativity. Gen Relat Gravit 1990, 22, 511. [CrossRef]
- J. J. Sylvester, On the general theory of associated algebraical forms. Cambridge and Dublin Math. Journal 1851, VI, 289-293.
- J. J. Sylvester. The collected mathematical papers of James Joseph Sylvester; Cambridge University Press: Cambridge, UK, 2012; ISBN978-1-107-66143-1.
- M. Bartelmann, B. Feuerbacher, T. Krüger, D. Lüst, A. Rebhan, A. Wipf. Theoretische Physik; Springer-Verlag, 2014; ISBN978-3-642-54618-1.
- H. G. Evertz, W. von der Linden. Quantenmechanik; TU Graz: Graz, AT, 2017.
- B. Hall. Lie Groups, Lie Algebras, and Representations: An Elementary Introduction, Edition 2; Springer-Verlag, 2015; ISBN978-3-319-13467-3.
- K. Walter. Darstellungstheorie der Lorentz-Gruppe; Universität Münster: Münster, DE, 2008.
- M. Carmeli. Group Theory and General Relativity, Representations of the Lorentz Group and Their Applications to the Gravitational Field; McGraw-Hill: NewYork, US, 1977; ISBN978-0-07-009986-9.
Figure 1.
Relation between scalar product, induced norm and metric.

Figure 2.
Illustrative example in three dimensions with a two-dimensional submanifold: an infinitesimally thin rod in direction, consisting of black and white elements of length . The flat observer at point in a submanifold M with basis (red) measures the thin rod only as a point or very small disk. The observer can determine whether the disk is black or white. Now imagine the flat observer and the rod moving relative to each other along the direction (situation on the right). By counting the black and white elements that have passed through, the flat observer is given a measuring rule for distances which are not in its submanifold. In this example, the length of a black or white element serves as the standard length, the count corresponds to determining any distance as a multiple of the standard length. On the bottom left in gray the basis system of a local observer is shown, whose measurement is not limited to a submanifold.
Figure 2.
Illustrative example in three dimensions with a two-dimensional submanifold: an infinitesimally thin rod in direction, consisting of black and white elements of length . The flat observer at point in a submanifold M with basis (red) measures the thin rod only as a point or very small disk. The observer can determine whether the disk is black or white. Now imagine the flat observer and the rod moving relative to each other along the direction (situation on the right). By counting the black and white elements that have passed through, the flat observer is given a measuring rule for distances which are not in its submanifold. In this example, the length of a black or white element serves as the standard length, the count corresponds to determining any distance as a multiple of the standard length. On the bottom left in gray the basis system of a local observer is shown, whose measurement is not limited to a submanifold.
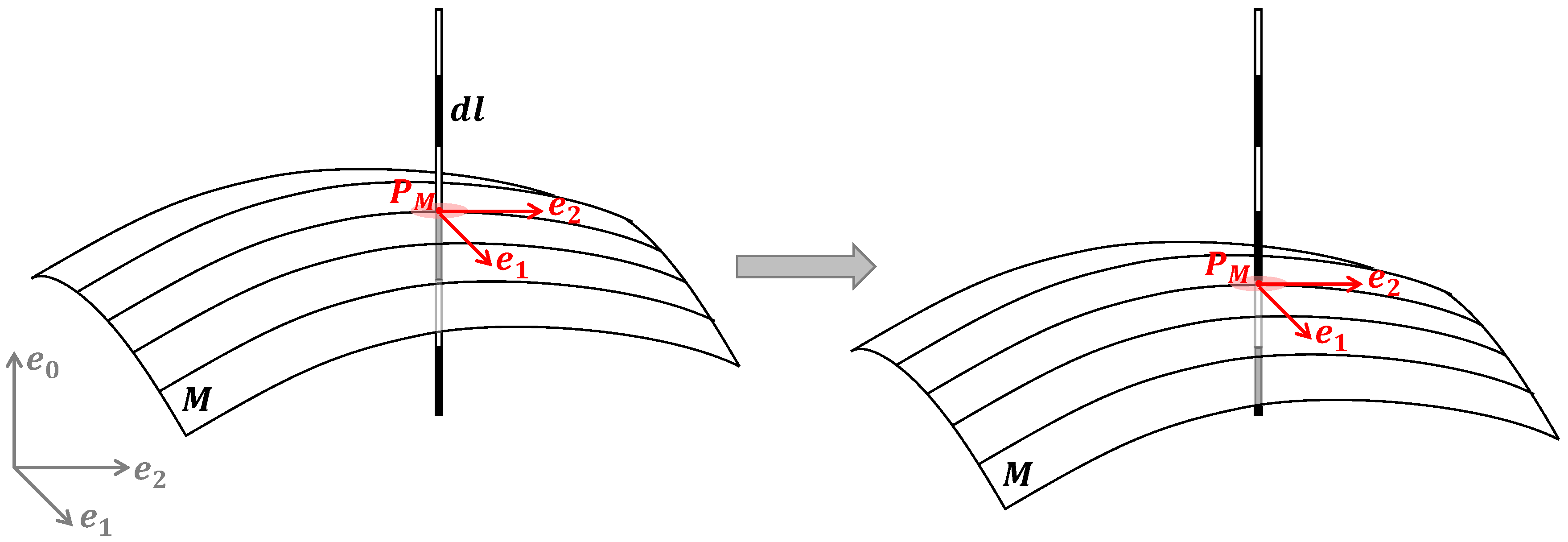
Figure 3.
Illustrative example: an infinitesimally thin rod tilted at a small angle from the direction. From the situation on the left to the situation on the right there is a relative displacement between the submanifold of the flat observer M and the rod. After defining the distance measurement outside of its submanifold M by counting black and white elements on the rod, the flat observer has to assume that the distance from black (situation on the left) to white (situation on the right) has remained the same as in Figure 2. In addition, the observer has covered the distance within its submanifold to follow the rod. Thus, according to this measuring rule, the total distance covered is given by , which can be expected when using a mixed basis and choosing the length element as the basis vector for lengths outside of M. In contrast, the local observer can use the basis vector as a reference and finds that the distance traveled in the direction is slightly shorter than the one in Figure 2. The local observer thus makes Euclidean measurements (indicated in gray).
Figure 3.
Illustrative example: an infinitesimally thin rod tilted at a small angle from the direction. From the situation on the left to the situation on the right there is a relative displacement between the submanifold of the flat observer M and the rod. After defining the distance measurement outside of its submanifold M by counting black and white elements on the rod, the flat observer has to assume that the distance from black (situation on the left) to white (situation on the right) has remained the same as in Figure 2. In addition, the observer has covered the distance within its submanifold to follow the rod. Thus, according to this measuring rule, the total distance covered is given by , which can be expected when using a mixed basis and choosing the length element as the basis vector for lengths outside of M. In contrast, the local observer can use the basis vector as a reference and finds that the distance traveled in the direction is slightly shorter than the one in Figure 2. The local observer thus makes Euclidean measurements (indicated in gray).
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



