Submitted:
13 April 2019
Posted:
15 April 2019
You are already at the latest version
Abstract
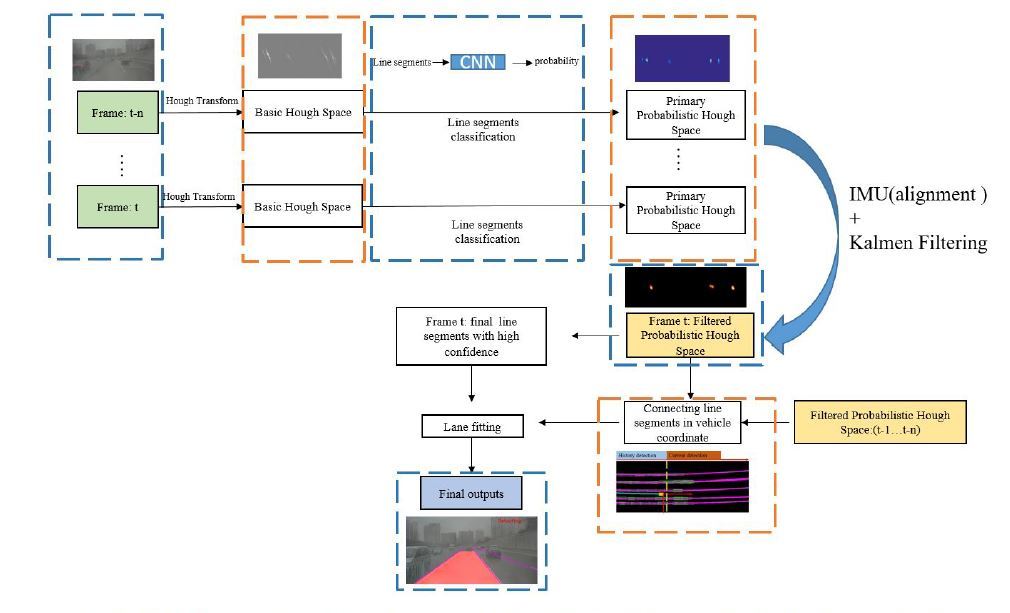
It's challenging to achieve robust lane detection depending on single frame when considering complicated scenarios. In order to detect more credible lane markings by using sequential frames, a novel approach to fusing vision and Inertial Measurement Unit (IMU) is proposed in this paper. The hough space is employed as the space where lane markings are stored and it's calculated by three steps. Firstly, a basic hough space is extracted by Hough Transform and primary line segments are extracted from it. In order to measure the possibility about line segments belong to lane markings, a CNNs based classifier is introduced to transform the basic hough space into a probabilistic space by using the networks outputs. However, this probabilistic hough space based on single frame is easily disturbed. In the third step, a filtering process is employed to smooth the probabilistic hough space by using sequential information. Pose information provided by IMU is applied to align hough spaces extracted at different times to each other. The final hough space is used to eliminate line segments with low possibility and output those with high confidence as the result. Experiments demonstrate that the proposed approach has achieved a good performance.
Keywords:
IMU
; vision
; classification networks
; hough transform
; lane markings detection
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



