Submitted:
04 November 2020
Posted:
05 November 2020
You are already at the latest version
Abstract
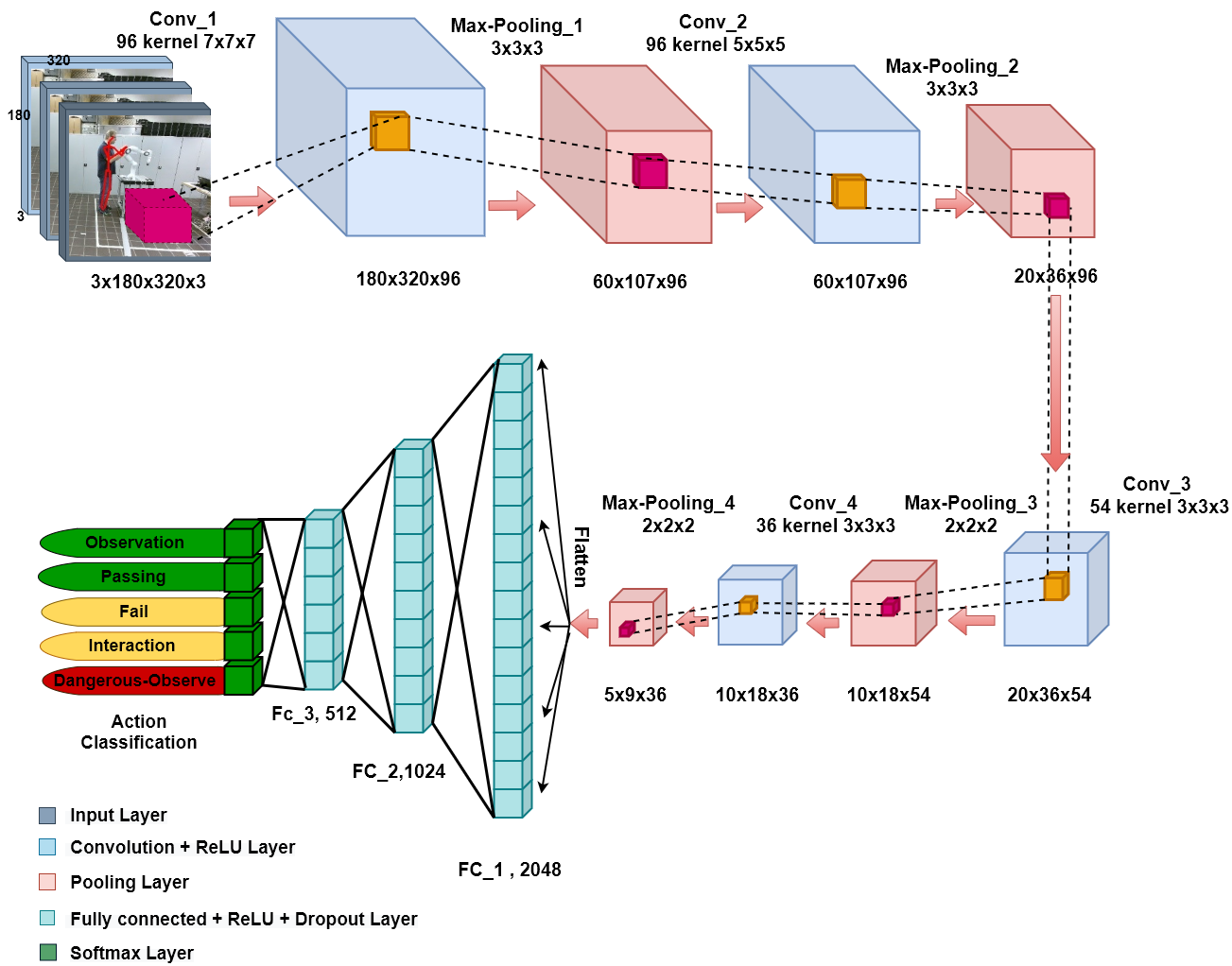
Digital enabled manufacturing systems require high level of automation for fast and low-cost production but should also present flexibility and adaptiveness to varying and dynamic conditions in their environment, including the presence of human beings; However, this presence of workers in the shared workspace with robots decreases the productivity as the robot is not aware about the human position and intention which leads to concerns about the human safety. This issue is addressed in this work by designing a reliable safety monitoring system for collaborative robots (Cobots). The main idea here is, to significantly enhance safety by a combination of recognition of human actions using visual perception and at the same time interpreting physical human-robot contact by tactile perception. Two datasets containing contact and vision data are collected by using different volunteers. The action recognition system classifies human actions using the skeleton representation of the latter when entering the shared workspace and the contact detection system distinguishes between intentional and incidental interactions if a physical contact between human and cobot takes place. Two different deep learning networks are used for human action recognition and contact detection which in combination, are expected to lead to the enhancement of human safety and an increase of the level of cobot perception about human intentions. The results show a promising path for future AI-driven solutions in safe and productive human–robot collaboration (HRC) in industrial automation.
Keywords:
Safe physical Human-Robot Collaboration
; collision detection
; human action recognition
; artificial intelligence
; industrial automation
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



