
Submitted:
06 January 2021
Posted:
08 January 2021
You are already at the latest version
Abstract
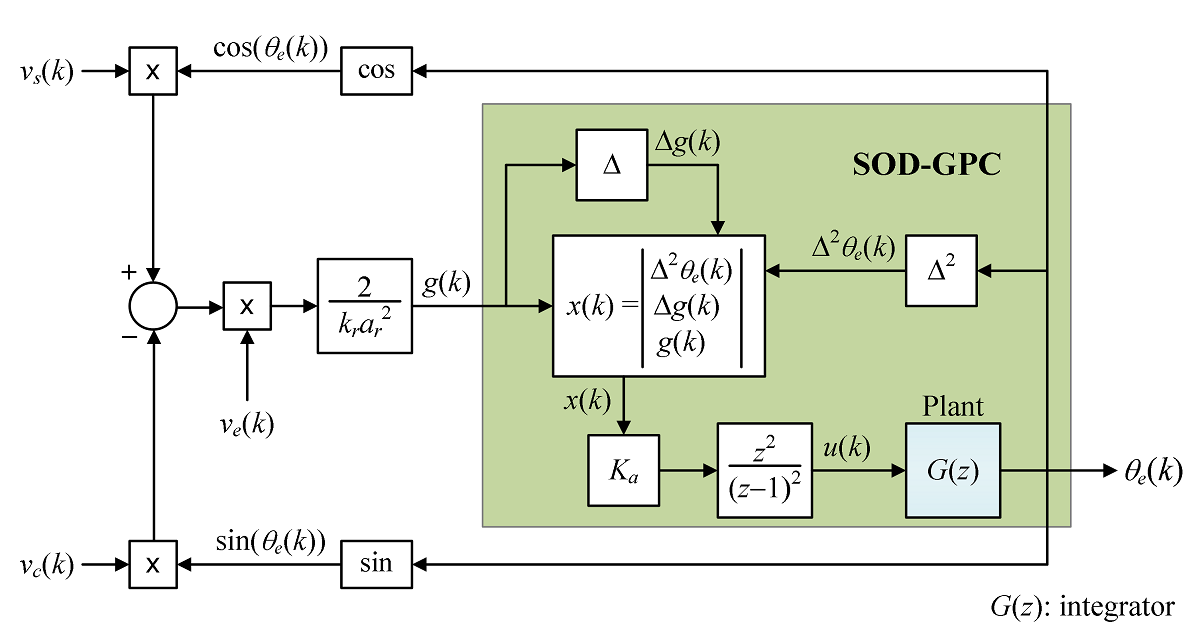
High-performance motor drives that operate in harsh conditions require an accurate and robust angular position measurement to correctly estimate the speed and reduce the torque ripple produced by angular estimation error. For that reason, a resolver is used in motor drives as a position sensor due to its robustness. A resolver-to-digital converter (RDC) is an observer used to get the angular position from the resolver signals. Most RDCs are based on angle tracking observers (ATOs). On the other hand, generalized predictive control (GPC) has become a powerful tool in developing controllers and observers for industrial applications. However, no GPC-based RDC with zero steady-state error during constant speed operation was proposed. This paper proposes an RDC based on a second-order difference GPC (SOD-GPC). In SOD-GPC, the second-order difference operator is applied to design a GPC model with two embedded integrators. Thus, the SOD-GPC is used to design a type-II ATO whose steady-state angle estimation error tends to zero during constant speed operation. Simulation and experimental results prove that the proposed RDC system has better performance than other literature approaches.
Keywords:
angle tracking observer
; generalized predictive control
; resolver
; resolver-to-digital converter
; tracking
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



