
Submitted:
18 July 2022
Posted:
20 July 2022
You are already at the latest version
Abstract
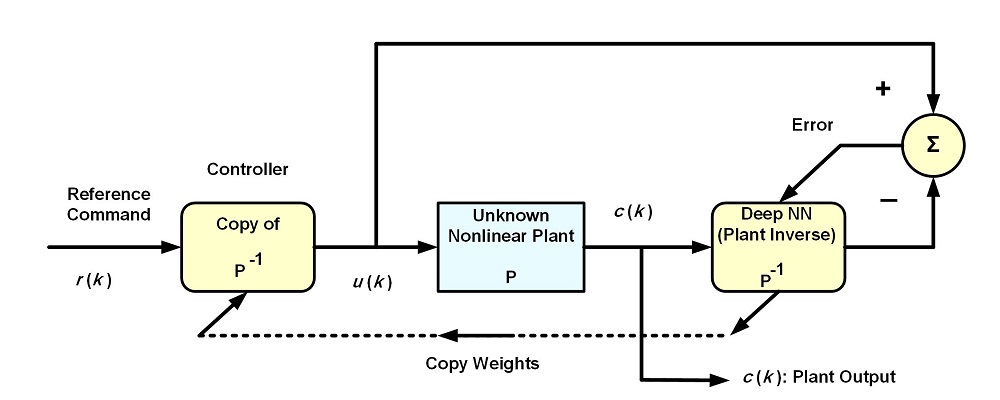
An adaptive deep neural network is used in an inverse system identification setting to approximate the inverse of a nonlinear plant with the aim of constituting the plant controller by copying to the latter the weights and architecture of the converging deep neural network. This deep learning (DL) approach to the adaptive inverse control (AIC) problem is shown to outperform adaptive filtering techniques and algorithms normally used in adaptive control, especially when the plant is nonlinear. The deeper the controller the better the inverse function approximation, provided that the nonlinear plant have an inverse and that this inverse can be approximated. Simulation results prove the feasibility of this DL-based adaptive inverse control scheme. The DL-based AIC system is robust to parameter change of the nonlinear plant in that, under such change, the plant output reassumes the value of the reference signal considerably faster than with the adaptive filter counterpart of the deep neural network. Settling times and rise times of the step response are shown to improve in the DL-based AIC system.
Keywords:
deep neural network
; deep learning controller
; nonlinear plant
; adaptive inverse control
; robust control
; autoencoder
; computational complexity
; sensor control
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



