
Submitted:
22 February 2023
Posted:
22 February 2023
You are already at the latest version
Abstract
The Sun is a frame at relative rest in which sunlight travels at the emitted speed c. Earth travels at the revolving speed v in this frame. The reflection of light as a mechanical phenomenon applies to the modified Michelson interferometer employed by Miller in his experiments with light from the Sun. Unlike the Tomaschek experiments, which use light from stars that may travel in the Universe at velocities different from that of the Sun, the fringe shifts in the Miller experiments are predictable. Based on Michelson's derivation, Miller expected in his experiments at Mount Wilson a 1.12 fringe shift and observed a fringe shift of 0.08 in 1921 and 0.088 in 1925. The reflection of light as a mechanical phenomenon predicts zero fringe shift for Miller's experiment agreeing only with his observations at the Cleveland laboratory in 1924.
Keywords:
geometrical optics
; speed of light
; reflection of light
; elastic collision ball-wall
; modified Michelson interferometer
1. Introduction
The Sun is a frame at relative rest in which sunlight travels at the emitted speed . Earth travels at the revolving speed in this frame. The reflection of light as a mechanical phenomenon applies to the modified Michelson interferometer employed by Miller in his experiments with light from the Sun. Unlike the Tomaschek experiments, which use light from stars that may travel in the Universe at velocities different from that of the Sun, the fringe shifts in the Miller experiments are predictable. Based on Michelson’s derivation, Miller expected in his experiments at Mount Wilson a fringe shift and observed a fringe shift of in 1921 and in 1925. The reflection of light as a mechanical phenomenon predicts zero fringe shift for Miller’s experiment agreeing only with his observations at the Cleveland laboratory in 1924.
The reflection of light as a mechanical phenomenon [1,2,3] considers the speed of light independent from its moving source, but its reflection is similar to that of a ball by a wall in motion. This study continues with emission, propagation, and reflection of light as mechanical phenomena in inertial frames [4], observation of a star’s orbit [5], a general consideration of light reflection [6,7], and here with the reflection of light applied to the Miller experiment [8,9].
The emission, propagation, and reflection of light in inertial frames [4] conclude that physics phenomena in an inertial frame can be studied in any other inertial frame considered at relative rest. Here, the Sun’s frame at relative rest replaces the absolute frame for physics studies in Earth’s inertial frame. Thus, the Sun is a fixed light source for Earth, and Earth may be considered an inertial frame in the Sun’s frame at relative rest at the time of an experiment. The light from the Sun travels at the constant speed in any direction in the Sun’s frame at relative rest.
The reflection of light as a mechanical phenomenon applied to Michelson’s interferometer with a particular geometry [1,2] predicts zero fringe shift, and to a geometry [3] close to that presented in the Michelson-Morley experiment [10] offers fringe shift and greater for other geometries. Michelson’s derivation predicts a fringe shift.
This paper applies the theoretical derivation [1,2] and numerical calculation [3] to Miller’s experiments. Unlike the Tomaschek experiments [11], the fringe shifts in Miller’s experiments are predictable.
The reflection of light as a mechanical phenomenon [1,2,5] based on the elastic collision of balls with a wall in motion at the limit when the mass of balls converges to zero offers the equation
In Eq. (1), is the speed of a reflected wavefront of a ray of light by a mirror in motion, is the wavefront speed from the source or a mirror as a source, is the mirror speed in the opposite direction of the incident wavefront from the source, and is the mirror speed in the direction of the reflected wavefront. Here, these speeds are in the Sun’s frame at relative rest. The mirror moves in one unique observable direction with speed . However, regarding the light wavefront, as far as the collision effect is concerned, it has multiple directions of and at the moment of collision according to the mirror inclinations. Speeds and are projections of in their corresponding directions.
Another form of Eq. (1) is
In Eq. (2), the speeds and replace and in Eq. (1), respectively. Angle corresponds to the opposite direction of the incident wavefront, and angle to the direction of the reflected wavefront. These angles are measured from the direction of velocity vector , originating at the point of collision. The directions
of and are outward from the point of collision.
In the Sun’s frame at relative rest, the velocity of mirrors attached to the Michelson interferometer is affected by Earth’s revolving velocity around the Sun and Earth’s spin velocities . Therefore, Eq. (1) becomes the equation
and Eq. (2) the equation
where , , , and are the corresponding angle for the incident and reflected wavefront of light for velocity and .
Michelson [10] derives the fringe shift in the space filled with ether. Consequently, the speed of light from a source before and after reflection is the constant . The study of light reflection as a mechanical phenomenon [1,2,5] occurs in a vacuum. Like a ball in an elastic collision with a wall, the wavefront speed changes after reflection by a moving mirror. Therefore, the difference between these two approaches is the reflection of light by a moving mirror.
2. Interferometer on Earth’s Equator
2.1. General considerations
The following drawings illustrate a way to bring the light from the Sun to a modified Michelson interferometer. For simplicity, Earth’s axis has no tilt.
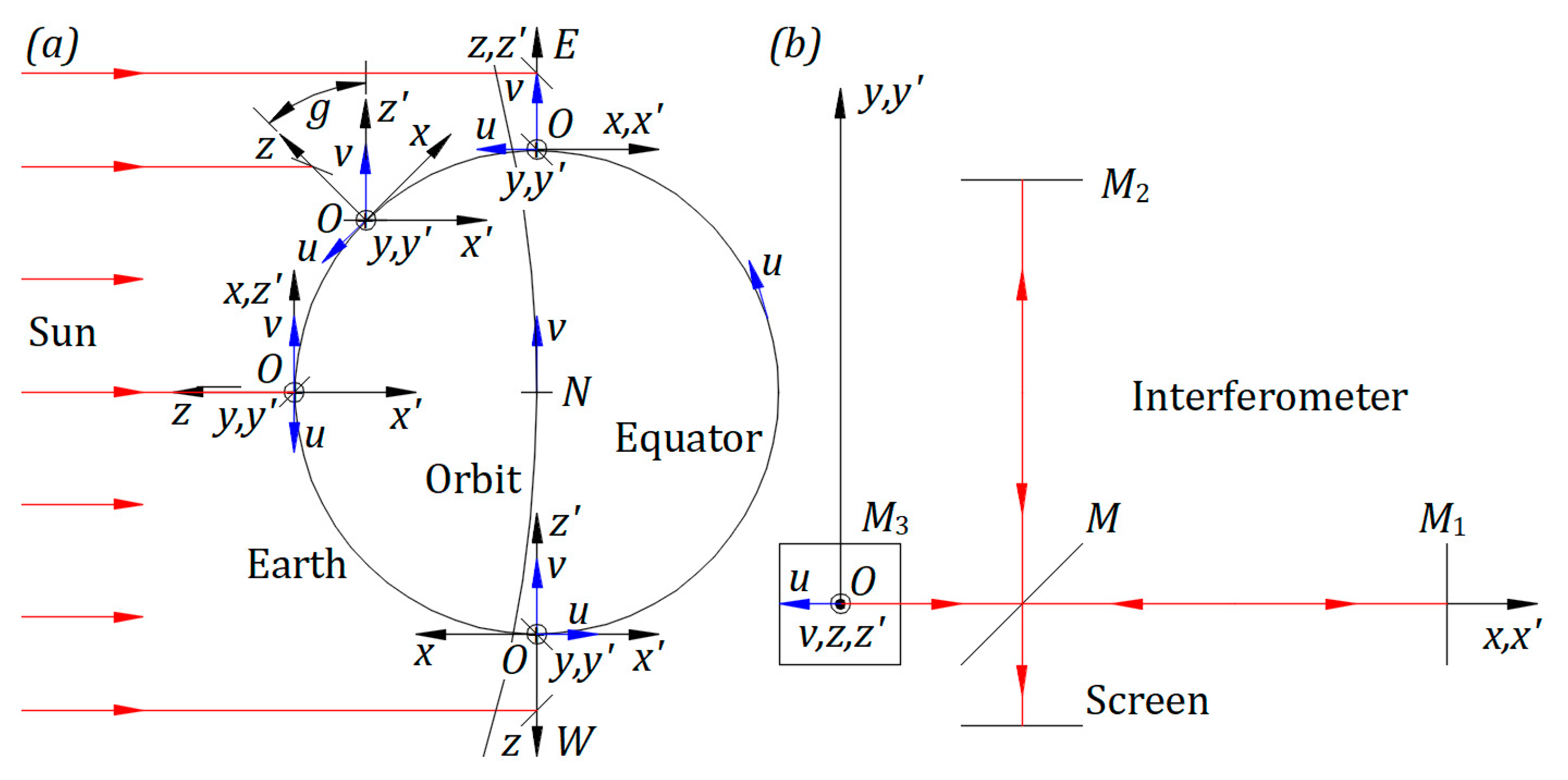
Figure 1a illustrates Earth’s equatorial circle, Earth’s revolving orbit around the Sun, and the center of the Sun and Earth in the same plane. The North Pole is outward, and the South Pole is inward, perpendicular to the paper plane.
An observer in the Sun’s frame at relative rest also perceives the physics phenomena as a local observer in Earth’s inertial frame. The observer’s location is on the North side of the Equator.
Figure 1b illustrates the Michelson interferometer at 6 am, as seen from the top side of Figure 1a. Mirrors , , , and beam splitter belong to the instrument. Mirror replaces the instrument’s source of light.
The cartesian frame , fixed to the instrument, originates at point of . Axis is on the horizontal line, and axis is perpendicular to Earth’s local surface. Plane is parallel to Earth’s local surface and perpendicular to the local Earth’s radius at point . At 6 am, the revolving velocity of Earth coincides with .
The interferometer is in plane . It rotates counterclockwise around with an angle measured from . The initial position of the instrument is when direction coincides with for , as shown in Figure 1b.
In the Sun’s frame at relative rest, a vector velocity in the direction of the cartesian frame is attached permanently to the origin of . Earth’s spin changes the origin position of and ; different from , keeps its axes’ directions fixed in the Sun’s frame at relative rest.
The instrument on the Equator belongs to a local Meridian. The Equator’s start position can be defined when: the local Meridian of the instrument is at 6 am, frames and coincide, and the device is at the initial position, as illustrated in Figure 1b.
Figure 1.
(a) Interferometer on Earth’s Equator at 6 am, noon, 6 pm, and between 6 am and 6 pm. (b) Interferometer details.
Figure 1.
(a) Interferometer on Earth’s Equator at 6 am, noon, 6 pm, and between 6 am and 6 pm. (b) Interferometer details.
In the Sun’s frame at relative rest, the center of the Sun, Earth’s orbit, and the Equator’s circle are always in the same plane. Planes and belong to Equator’s plane. Plane is parallel to Earth’s local surface and perpendicular to Equator’s plane. Axes and are overlapping from 6 am to 6 pm.
Earth’s spin changes the position of . At the same time, in plane , axis rotates clockwise around , keeping the directions of unchanged. with the vector velocity at makes the angle measured from .
Figure 1a indicates the position of the interferometer at 6 am, which is the Equator’s start position, corresponding to . Earth’s spin brings the interferometer to an angle between 6 am and 6 pm, to at noon, and at 6 pm.
2.2. Interferometer on the Equator at 6 am, noon, and 6 pm
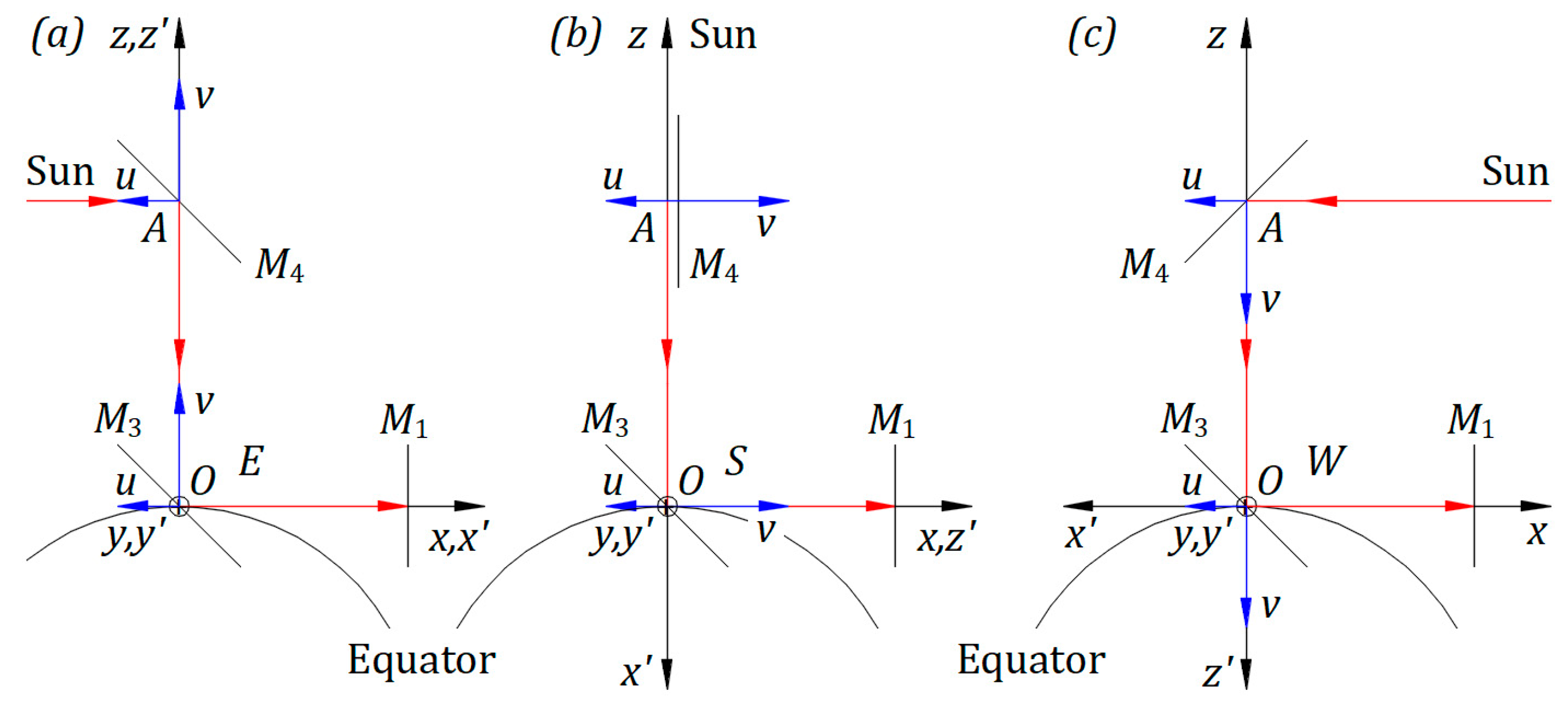
Figure 2a depicts the Equator’s start position at 6 am for . Earth’s spin brings the interferometer at noon, as illustrated in Figure 2b for , at 6 pm, as presented in Figure 2c for , and in general, at a time between 6 am and 6 pm, as shown in Figure 3a for an angle .
Point belongs to mirror and to axis . Mirror , axis , mirror , and interferometer form a solid structure. Mirror rotates at the Equator around an axis through point perpendicular to . At the North Pole around axis . And between the Equator and the North Pole around both. stays fixed while the interferometer rotates around axis .
Considering that the Sun emits parallel rays of light in the direction from the Sun’s center toward Earth’s center, only these rays are reflected by in the opposite direction to toward . The incident rays from the Sun are perpendicular to at any location on Earth.
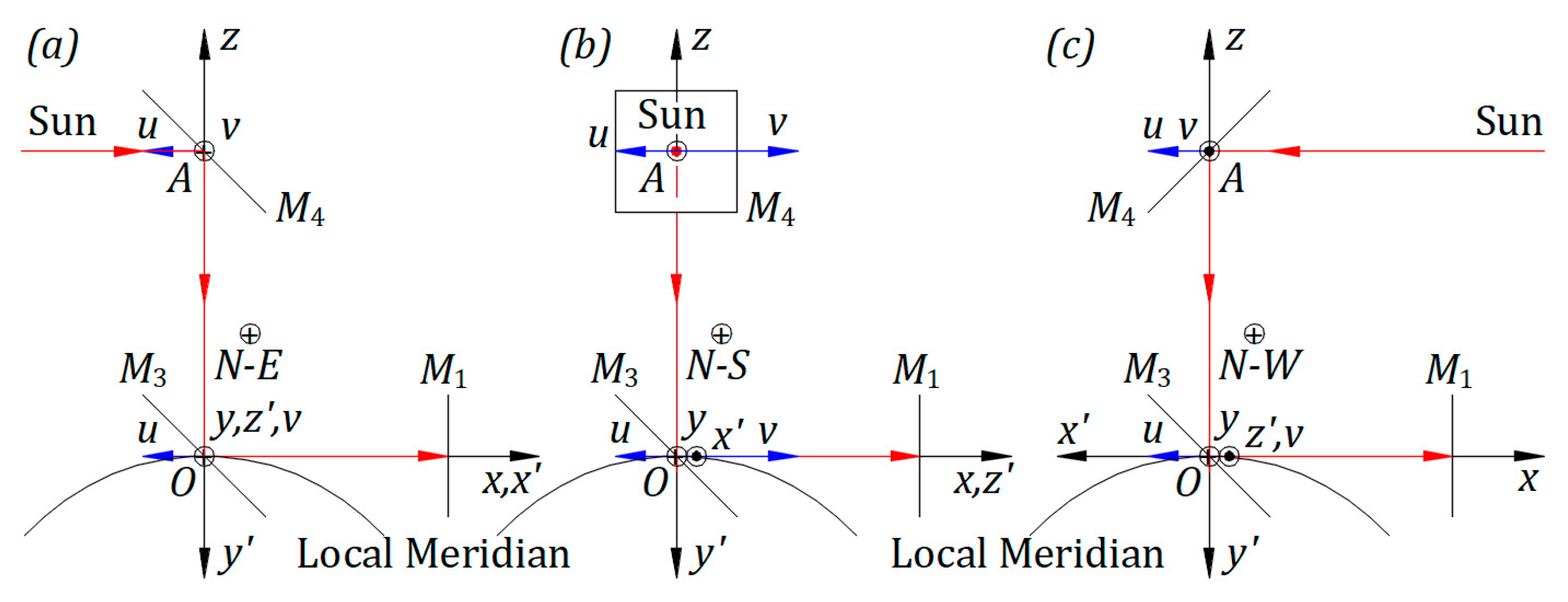
Figure 2.
Interferometer on the Equator: (a) at 6 am, (b) at noon, and (c) at 6 pm.
The vector sum of velocity and offers the moving velocity of the device in the Sun’s frame at relative rest. The instrument has a longitudinal velocity given by velocities and and a transversal velocity only given by velocity at any Earth’s location.
In Figure 2a, point of reflects the ray of light toward with the speed given by Eq. (4),
.
The ray reflected at along and for has the speed . With , .
The projection of on is . The rays reflected by drift transversal opposite to velocity .
In Figure 2b, the light from the Sun travels perpendicular to ; therefore, no need for mirror . At this position, rotates around to continue reflecting rays for .
The ray reflected at along and for has, according to Eq. (4), the speed
.
The projection of on is zero. Thus, there is no transversal drift on rays reflected at .
Figure 2c shows the device at 6 pm. Point of reflects the ray of light toward with the speed given by Eq. (4),
.
The ray reflected at along and for has the speed
.
The projection of on is . The rays reflected by drift transversal opposite to velocity .
2.3. Interferometer on the Equator at an angle g
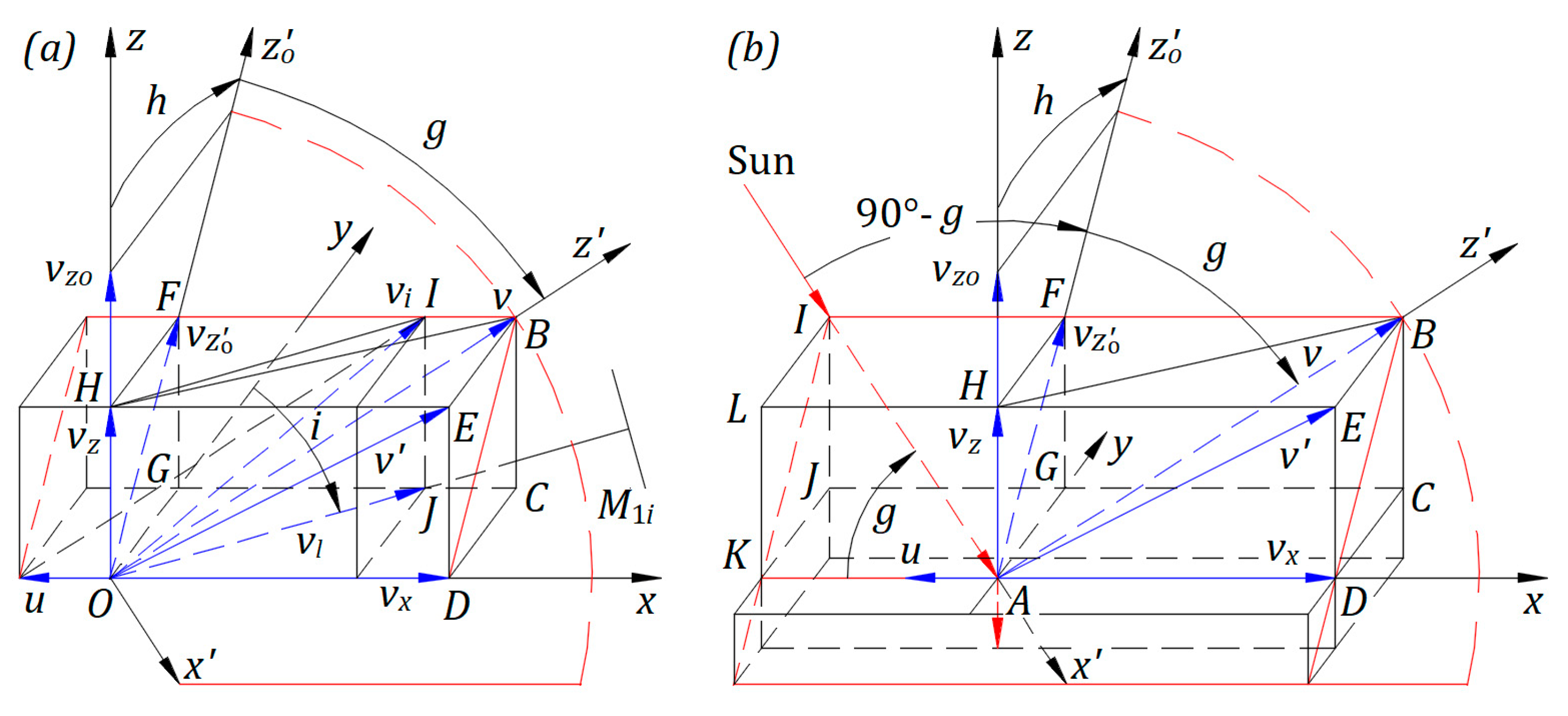
Figure 3a presents the instrument between 6 am and 6 pm when makes an angle measured from . To reflect the rays in the direction , rotates around the axis through point and perpendicular to . Angle has an opposite direction to Earth’s spin.
From 6 am to 6 pm for , projection of on is the transversal speed of the instrument in the Sun’s frame at relative rest
Projection of on , , offers the equation
Figure 3.
(a) Interferometer at an angle . (b) Three-dimensional detail of mechanical velocities at point . (c) Interferometer at an angle from illustrated in plane .
Figure 3.
(a) Interferometer at an angle . (b) Three-dimensional detail of mechanical velocities at point . (c) Interferometer at an angle from illustrated in plane .
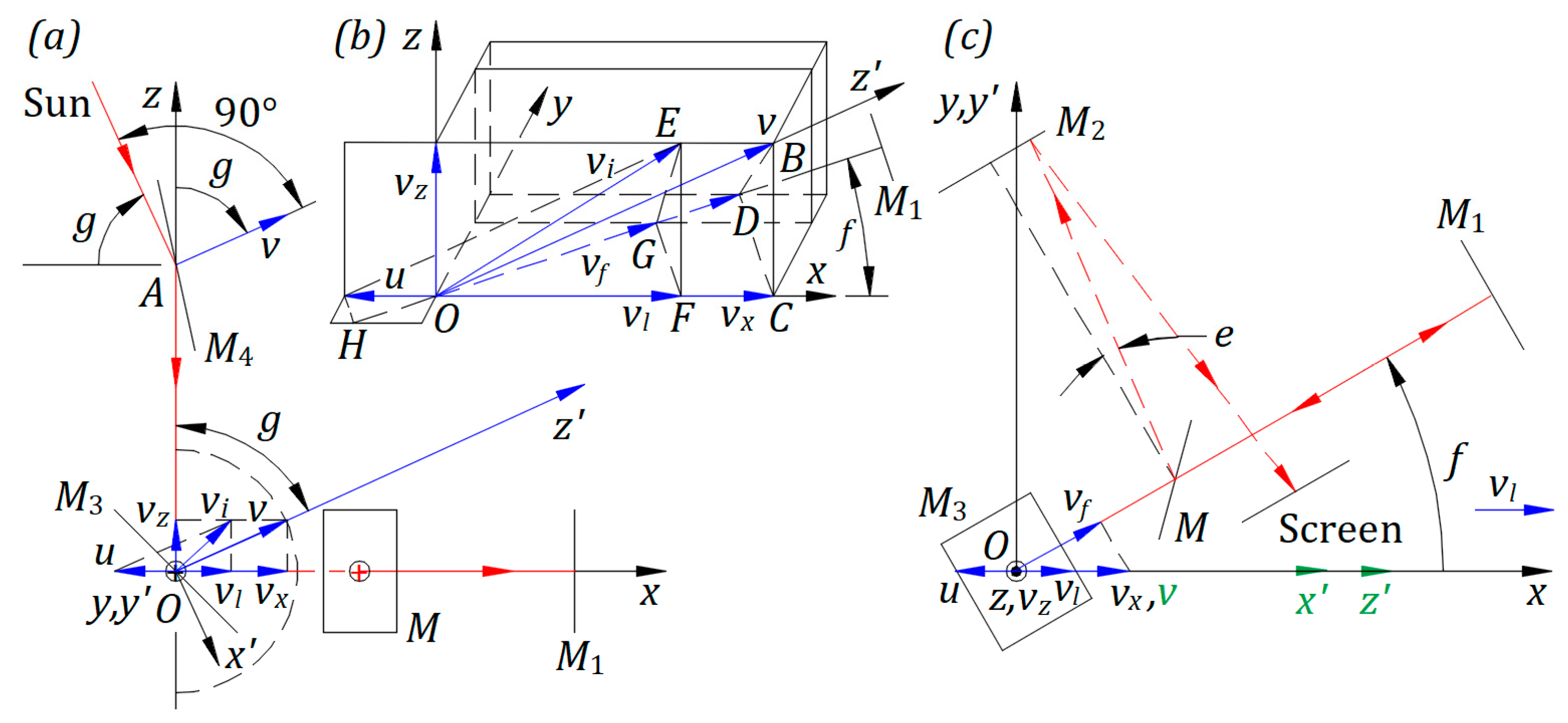
In Figure 3b, the vector sum of velocities and , shown in the plane , is the moving velocity of the device in the Sun’s frame at relative rest. and are equal to for any angle . The projection of and are and , respectively. is the longitudinal component of velocity for the instrument.
and are perpendicular to for any angle . and planes and their intersection along are perpendicular to , and is perpendicular to . Therefore, is perpendicular to plane , and is perpendicular to . Thus, the projections of and on are identical to . With the same reasoning, the projections of and on are identical to . Point belongs to , and that vary with angle .
The longitudinal speed of the instrument in the Sun’s frame at relative rest then, with from Eq. (6),
Figure 3c illustrates the top side view of Figure 3a with the interferometer rotated by an angle from . For the geometry presented in Ref. [3], reflected rays by beam splitter travel as illustrated at an angle from the perpendicular line to . , , and in green indicate that they are not in plane .
Point of reflects the ray of light toward with the speed
that gives the equation
The ray from reflected at along , employing Eq. (4), has the speed . The term is according to Figure 3a,b, and given by Eq. (7). With from Eq. (8), yields the equation
With the same reasoning as for , the reflected speed of light at along at an angle is
that offers the equation
3. Interferometer on the North Pole
The solid structure, illustrated in Figure 2a, brought from the Equator at 6 am along the local Meridian at the North Pole, looks like in Figure 4a. From the Equator to the North Pole, the frame rotates in the Sun’s frame at relative rest. In plane , rotates around from to ; after rotation, has the same direction as . Planes and coincide and are parallel to Equator’s plane. Axis is perpendicular to Equator’s plane.
4. Interferometer on a Latitude
The right side view of Figure 2a, ignoring , is as in Figure 5a. Moving the solid structure from the Equator toward the North Pole, rotates in the Sun’s frame at relative rest. Velocity with its axis rotates in plane around with angle measured from axis , as visualized in Figure 5b. For , the interferometer is at the Equator, and for at the North Pole. In the rotation on a Meridian, from the Equator to the North Pole, Mirror stays fixed.
In Figure 5b, we can define the Latitude’s start position at the intersection of the local Meridian with the local Latitude at 6 am. is marked with index o for angle , , and is in plane making an angle measured from .
Plane is parallel, and axis is perpendicular to Equator’s plane here and at any location on Earth. Plane is parallel, and the axis is perpendicular to Earth’s local surface as on any place on Earth. and are perpendicular to plane and intersect along .
Earth’s spin rotates the frame on the Latitude from 6 am to 6 pm. At the same time, velocity with its axis rotates around fixed axis from at 6 am for angle to at noon for and to at 6 pm for . Thus, on a Meridian, angle is identical when the instrument is on different Latitudes to that at the Equator. On a Latitude, mirror rotates around both axes to capture the parallel rays from the Sun.
The view from the opposite direction of shows vector with its axis rotating from 6 am to 6 pm on a semicircle with origin at and radius . The semicircle is in plane . Any angle yields an identical image. The semicircle is identical to that in Figure 3a, illustrated in a dashed line in plane .
The view from the opposite direction of sees the semicircle projection of the vector as a semi-ellipse in plane , illustrated in a dashed line in Figure 5c. The projection points of this semi-ellipse on represent the speeds for angles .
Figure 5c is the left side view of Figure 5b for an angle measured from . The projection of the velocity that belongs to on plane is . , , and axes are depicted in green to indicate that they are not in plane ; is in the front, and and are in the back of plane .
Figure 5.
(a) Interferometer on the Equator at 6 am. Interferometer on a Latitude: (b) at angle , and (c) left side view of Figure 5(b).
Figure 5.
(a) Interferometer on the Equator at 6 am. Interferometer on a Latitude: (b) at angle , and (c) left side view of Figure 5(b).
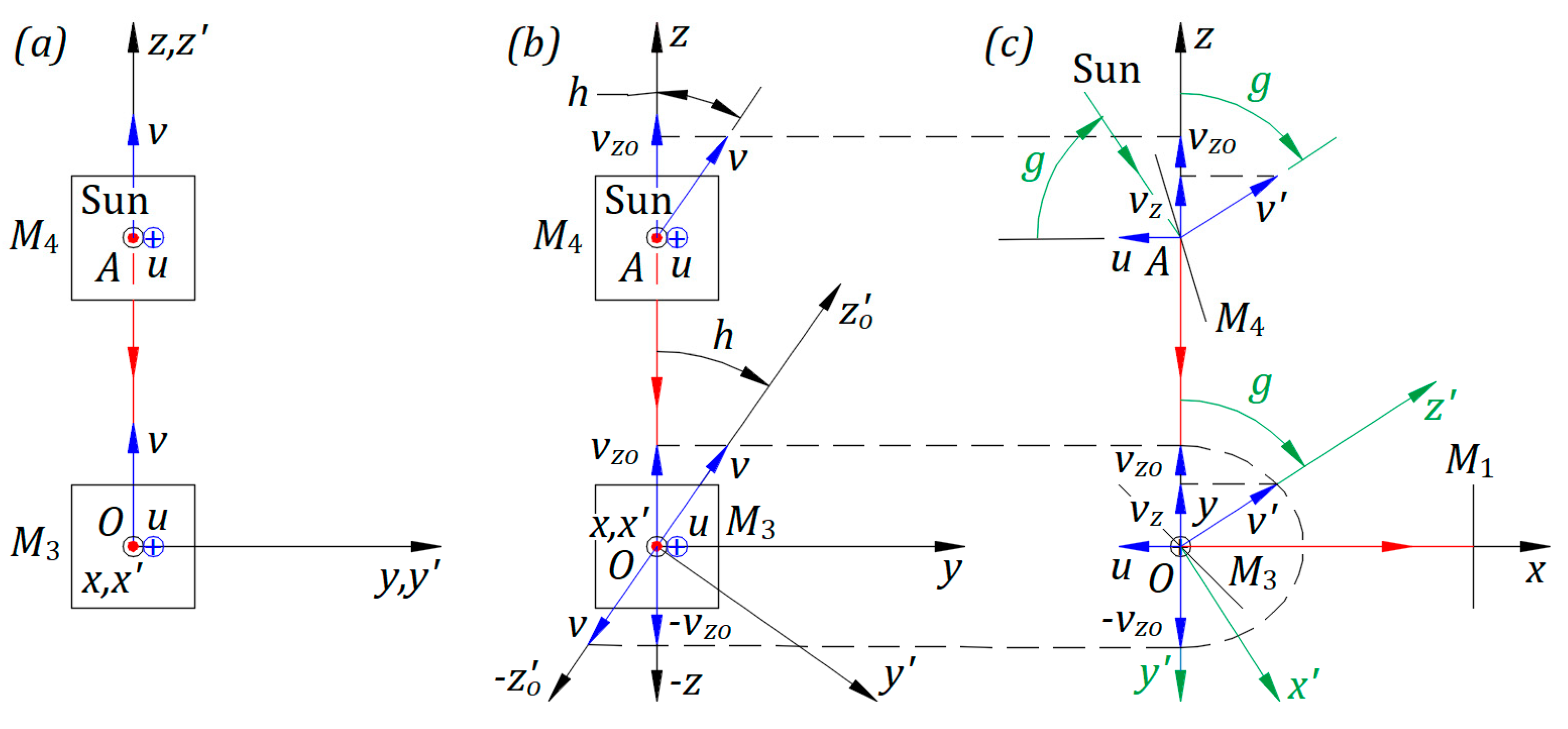
Planes and intersect along . coincides with at . Axis rotates in the back of plane from at the Latitude’s start position when it is behind for to plane coinciding with for . Then rotates in front of plane to for , above . rotates in front of plane from for to above for , then to for .
Figure 6a offers a three-dimensional visualization of the mechanical velocities at point of Figure 5c. Axis is in plane . Rectangular belongs to , to , and to . The speed is along axis . Index for indicates that mirror location corresponds to angles defined below. Velocities , , and belong to rectangular of the plane in red; and to plane .
The projection of on at the Latitude’s start position offers the equation
The projection of on is , therefore,
The projection of on , , is also the projection of on . Employing Eq. (12),
Figure 6.
Mechanical velocities of Figure 5(c): (a) at point and (b) at point .
Figure 6.
Mechanical velocities of Figure 5(c): (a) at point and (b) at point .
The contribution of on is zero at all times; therefore, is the transversal speed of the instrument in the Sun’s frame at relative rest.
belongs to as well. The projection of on is , therefore,
The vector sum of velocities and is the instrument velocity in the Sun’s frame at relative rest . Angle and from triangle , the law of cosines yields the magnitude of velocity that yields the equation
The projection of on also is from Eq. (13). The triangle gives the projection of on the plane , , that is the longitudinal speed of the interferometer in the Sun’s frame at relative rest. , then
, then in triangle , that offers the equation
Angle indicates direction at the initial position, , when direction coincides with that of .
Figure 6b offers a three-dimensional visualization of the mechanical velocities at point of Figure 5c. At , we can attach the same frame as at , , and . Axis is in plane . Velocities and belong to rectangular of plane , which contains red lines. The ray from the Sun travels in this plane along the line . Point of reflects it towards . must be adjusted with both axes to reflect the incident ray along axis from I to A towards .
The ray of light reflected at toward has the speed
that gives the equation
From Figure 6a, we can calculate the speed of light reflected in the direction for angle , . from Eq. (16) includes both and contributions along . Thus, term , and then that offers the equation
For the same reason as in Figure 3b, the projections of and on are identical for any angle measured from . The speed of light reflected at in the direction of for an angle measured from is that yield the equation
5. Numerical calculation of the fringe shift
For the length m of the interferometer’s arms, Miller expected a fringe shift based on Michelson’s derivation [10] and observed, at Mount Wilson, in 1921 and in 1925 [8,9]. The observations taken in the laboratory at Cleveland 1924, with sunlight and laboratory sources, show a null result of experiments. The above discrepancy in experimental results requires a theory to support it or a reevaluation of Miller’s experiments.
The velocity is the moving velocity of the instrument in the Sun’s frame at relative rest. The device has the longitudinal velocity at the Equator and on a Meridian parallel to and the transversal velocity perpendicular to plane . To correctly calculate the fringe shift within the interferometer, we have to consider both velocities, but there is no such theoretical derivation.
In the following derivation, we assume that the fringe shift is not affected by the transversal speed , and we calculate the fringe shift for the four positions offered by Ref. [3].
The numerical calculation can be performed on a spreadsheet according to the theoretical derivation of Ref. [3], starting with the set of speeds , , , , and , followed by the times the light travels its paths and their differences, and finally, the fringe shift for each of the four positions at angle , , and .
The initial position of the interferometer for corresponds to the position in Ref. [3] because between the two selected initial positions, there is a difference of . Thus, for , , , and positions correspond to , , , and positions in Ref. [3].
The speed from Eq. (20) replaces the speed correspondingly in the sets of speeds , , , , and in the four positions as defined in Ref. [3]. The numerical magnitude of speed from Eq. (16) replaces speed in all four positions of Ref. [3], including the above sets of speeds.
In Ref. [3], rays along the screen interfere because their speeds, and , are equal. Ref. [3] derives the difference between the two light paths in the number of wavelengths , where for each of the four positions. is the difference in the time the two rays travel their paths with the same or different speeds. is the constant m/s and the wavelength of light for constant .
If the speed of the two interfering rays increases or decreases, their wavelengths increase or decrease directly proportional. Therefore, the ratio speed/wavelength is a constant for any of their corresponding speeds/wavelengths. Therefore, are not affected by the speed magnitude of rays that interfere along the way to the screen. Thus, no need to change the formula . The interfering rays’ speed affects the fringes’ spread, which is unobservable.
For any location on Earth, the numerical calculation of the fringe shift, for m, predicts unobservable fringe shifts in the range. For m, the fringe shift is in the range of . The rays reflected by coming from different points of the Sun, or corresponding to different altitudes, or magnitudes of angle greater than aberration angle do not change the result of the fringe shifts.
In Ref. [3], different from this article, the source of light is a part of the interferometer belonging to Earth’s inertial frame. For m, the fringe shift is ; for m, is . According to emission, propagation, and reflection of light as mechanical phenomena in inertial frames [4], the fringe shift in the Michelson interferometer is zero.
6. Conclusions
With the assumption that the transversal velocity of the interferometer does not affect the fringe shift, Michelson derivation does not agree with Miller’s experiments at Mount Wilson in 1921 and 1025 and those at Cleveland laboratory in 1924. The derivation based on the reflection of light as a mechanical phenomenon does not agree with Miller’s experiments at Mount Wilson but agrees with experiments at Cleveland laboratory with sunlight and laboratory sources.
When the local meridian is at noon, from the Equator to the North Pole, there is no transversal speed for the instrument, and the numerical calculation yields zero fringe shift. Miller observed fringe shifts at Mount Wilson for these positions as well. Therefore, a derivation considering the transversal speed should not affect the fringe shift for these positions and is not likely for any position of the instrument on Earth.
For any angle , the speed of light , and the longitudinal speed of the interferometer is . Neglecting the term , the speed of light within the interferometer is , which could explain why the fringe shift is zero or undetectable.
The Tomaschek experiment [11] may display a fringe shift if the star’s velocity in the Universe is different from that of the Sun. The light from a star arrives on Earth, no matter the distance from the star to the Sun, with two components: the emitted velocity and the star’s velocity [4,5]. The fringe shift depends on the difference between the speed of the star and that of the Sun. Experiments consist of trials and observations with different stars without any expectations. Nevertheless, the theoretical derivation is more complex, even if we know the star’s velocity to the Sun.
However, regardless of the outcome of a complete theoretical derivation, the contradictory results observed at Mount Wilson and the Cleveland laboratory leave this subject open to theoretical and experimental challenges.
Ref. [3], in which the source belongs to the interferometer, offers zero fringe shift for rad, for aberration angle rad, and greater than for an angle beyond the aberration angle. We chose a geometry for theoretical derivation and calculation of the fringe shift, but an experiment yields a fringe shift according to an unknown geometry. Since different magnitudes of angle can explain different fringe shifts for the same interferometer, the author expected to explain Miller’s observations at Mount Wilson and Cleveland Laboratory.
References
- Filipescu, F. D. Reflection of Light as a Mechanical Phenomenon Applied to a Particular Michelson Interferometer. Preprints 2020, 2020090032. [CrossRef]
- Filipescu, F. D. Opposing hypotheses of the reflection of light applied to the Michelson interferometer with a particular geometry. Phys. Essays. 2021, 34, 3, 268-273.
- Filipescu, F. D. Opposing hypotheses of the reflection of light applied to the Michelson interferometer. Phys. Essays. 2021, 34, 3, 389-396.
- Filipescu, F. D. Emission, propagation, and reflection of light as mechanical phenomena in inertial frames. Phys. Essays. 2021, 34 587-590.
- Filipescu, F. D. Observation of a star's orbit based on the emission and propagation of light as mechanical phenomena. Phys. Essays. 2022, 35, 2, 111-114.
- Filipescu, F. D. Emission, Propagation, and Reflection of Light as Mechanical Phenomena. Preprints 2022, 2022040061. [CrossRef]
- Filipescu, F. D. Emission, propagation, and reflection of light as mechanical phenomena: General considerations. Phys. Essays. 2022, 35, 3, 266-269.
- Miller, D. C. Ether-Drift Experiments at Mount Wilson. Proc. Natl. Acad. Sci. U. S. A. 1925, 11, 6, 306-314.
- Miller, D. C. The Ether-Drift Experiment and the Determination of the Absolute Motion of the Earth. Reviews of Modern Physics. 1933, 5 (3): 203–242. [CrossRef]
- Michelson, A. A.; Morley, E. W. On the relative motion of the earth and the luminiferous ether. Am. J. Sci. 1887, 34, 203, 333–345.
- Tomaschek, R. Über das Verhalten des Lichtes außerirdischer Lichtquellen. Ann. Phys. 1924, 378, 1-2, 105-126.
Figure 4.
Interferometer on the North Pole: (a) at 6 am, (b) at noon, and (c) at 6 pm.
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



