
Preprint
Article
Dual Variational Formulations for a Large Class of Non-Convex Models in the Calculus of Variations
Altmetrics
Downloads
793
Views
1039
Comments
1
A peer-reviewed article of this preprint also exists.


This version is not peer-reviewed
Submitted:
04 January 2023
Posted:
04 January 2023
Read the latest preprint version here
Alerts
Abstract
This article develops dual variational formulations for a large class of models in variational optimization. The results are established through basic tools of functional analysis, convex analysis and duality theory. The main duality principle is developed as an application to a Ginzburg-Landau type system in superconductivity in the absence of a magnetic field. In the first sections, we develop new general dual convex variational formulations, more specifically, dual formulations with a large region of convexity around the critical points which are suitable for the non-convex optimization for a large class of models in physics and engineering. Finally, in the last section we present some numerical results concerning the generalized method of lines applied to a Ginzburg-Landau type equation.
Keywords:
Subject: Computer Science and Mathematics - Applied Mathematics
1. Introduction
In this section we establish a dual formulation for a large class of models in non-convex optimization.
The main duality principle is applied to the Ginzburg-Landau system in superconductivity in an absence of a magnetic field.
Such results are based on the works of J.J. Telega and W.R. Bielski [2,3,13,14] and on a D.C. optimization approach developed in Toland [15].
About the other references, details on the Sobolev spaces involved are found in [1]. Related results on convex analysis and duality theory are addressed in [5,6,7,9,12]. Finally, similar models on the superconductivity physics may be found in [4,11].
Remark 1.
It is worth highlighting, we may generically denote
simply by
where denotes a concerning identity operator.
Other similar notations may be used along this text as their indicated meaning are sufficiently clear.
Also, denotes the Laplace operator and for real constants and , the notation means that is much larger than
Finally, we adopt the standard Einstein convention of summing up repeated indices, unless otherwise indicated.
In order to clarify the notation, here we introduce the definition of topological dual space.
Definition 1
(Topological dual spaces). Let U be a Banach space. We shall define its dual topological space, as the set of all linear continuous functionals defined on U. We suppose such a dual space of U, may be represented by another Banach space , through a bilinear form (here we are referring to standard representations of dual spaces of Sobolev and Lebesgue spaces). Thus, given linear and continuous, we assume the existence of a unique such that
The norm of f , denoted by , is defined as
At this point we start to describe the primal and dual variational formulations.
Let be an open, bounded, connected set with a regular (Lipschitzian) boundary denoted by
Firstly we emphasize that, for the Banach space , we have
For the primal formulation we consider the functional where
Here we assume , , . Moreover we denote
Define also by
by
and by
where
It is worth highlighting that in such a case
Furthermore, define the following specific polar functionals specified, namely, by
by
if where
At this point, we give more details about this calculation.
Observe that
Defining we have so that
where are solution of equations (optimality conditions for such a quadratic optimization problem)
and
and therefore
and
Replacing such results into (7) we obtain
if
Finally, is defined by
Define also
by
and by
2. The Main Duality Principle, a Convex Dual Formulation and the Concerning Proximal Primal Functional
Our main result is summarized by the following theorem.
Theorem 1.
Considering the definitions and statements in the last section, suppose also is such that
Under such hypotheses, we have
and
Proof.
Since
from the variation in we obtain
so that
From the variation in we obtain
From the variation in we also obtain
and therefore,
From the variation in u we get
and thus
Finally, from the variation in , we obtain
so that
that is,
From such results and we get
so that
Also from this and from the Legendre transform proprieties we have
and thus we obtain
Summarizing, we have got
On the other hand
Finally by a simple computation we may obtain the Hessian
in , so that we may infer that is concave in in .
The proof is complete. □
3. A Primal Dual Variational Formulation
In this section we develop a more general primal dual variational formulation suitable for a large class of models in non-convex optimization.
Consider again and let and be three times Fréchet differentiable functionals. Let be defined by
Assume is such that
and
Denoting , define by
Denoting and , define also
for an appropriate to be specified.
Observe that in the Hessian of is given by
Observe also that
and
Define now
so that
From this we may infer that and
Moreover, for sufficiently big, is convex in a neighborhood of .
Therefore, in the last lines, we have proven the following theorem.
Theorem 2.
Under the statements and definitions of the last lines, there exist and such that
and is such that
Moreover, is convex in
4. One More Duality Principle and a Concerning Primal Dual Variational Formulation
In this section we establish a new duality principle and a related primal dual formulation.
The results are based on the approach of Toland, [15].
4.1. Introduction
Let be an open, bounded, connected set with a regular (Lipschitzian) boundary denoted by
Let be a functional such that
where .
Suppose are both three times Fréchet differentiable convex functionals such that
and
Assume also there exists such that
Moreover, suppose that if is such that
then
At this point we define by
where
Observe that so that
On the other hand, clearly we have
so that we have got
Let .
Since J is strongly continuous, there exist and such that,
From this, considering that is convex on V, we may infer that is continuous at u,
Hence is strongly lower semi-continuous on V, and since is convex we may infer that is weakly lower semi-continuous on V.
Let be a sequence such that
Hence
Suppose there exists a subsequence of such that
From the hypothesis we have
which contradicts
Therefore there exists such that
Since V is reflexive, from this and the Katutani Theorem, there exists a subsequence of and such that
Consequently, from this and considering that is weakly lower semi-continuous, we have got
so that
Define by
and
Suppose now there exists such that
From the standard necessary conditions, we have
so that
Define now
From these last two equations we obtain
From such results and the Legendre transform properties, we have
so that
and
so that
4.2. The Main Duality Principle and a Related Primal Dual Variational Formulation
Considering these last statements and results, we may prove the following theorem.
Theorem 3.
Let be an open, bounded, connected set with a regular (Lipschitzian) boundary denoted by
Let be a functional such that
where .
Suppose are both three times Fréchet differentiable functionals such that there exists such that
and
Assume also there exists and such that
Assume is such that
Define
Assume is such that if then
Suppose also
Define by
and
Define also by
and
Observe that since is such that
we have
Let be a small constant.
Define
Under such hypotheses, defining by
we have
Proof.
Observe that from the hypotheses and the results and statements of the last subsection
where
Moreover we have
Also from hypotheses and the last subsection results,
so that clearly we have
From these last results, we may infer that
The proof is complete.
□
Remark 2.
At this point we highlight that has a large region of convexity around the optimal point , for sufficiently large and corresponding sufficiently small.
Indeed, observe that for ,
where is such that
Taking the variation in in this last equation, we obtain
so that
From this we get
On the other hand, from the implicit function theorem
so that
and
Similarly, we may obtain
and
Denoting
and
we have
and
From this we get
about the optimal point
5. A Convex Dual Variational Formulation
In this section, again for an open, bounded, connected set with a regular (Lipschitzian) boundary , and , we denote , and by
and
We define also
and and by
and
if where
for some small real parameter and where denotes a concerning identity operator.
Finally, we also define
Assuming
by directly computing we may obtain that for such specified real constants, in convex in and it is concave in on
Considering such statements and definitions, we may prove the following theorem.
Theorem 4.
Let be such that
and be such that
Under such hypotheses, we have
so that
Proof.
Observe that so that, since is convex in and concave in on , we obtain
Now we are going to show that
From
we have
and thus
From
we obtain
and thus
Finally, denoting
from
we have
so that
Observe now that
so that
The solution for this last system of equations (30) and (31) is obtained through the relations
and
so that
and
and hence, from the concerning convexity in u on V,
Moreover, from the Legendre transform properties
so that
Joining the pieces, we have got
The proof is complete.
□
Remark 3.
We could have also defined
for some small real parameter . In this case, is positive definite, whereas in the previous case, is negative definite.
6. Another Convex Dual Variational Formulation
In this section, again for an open, bounded, connected set with a regular (Lipschitzian) boundary , and , we denote , and by
and
We define also
and and by
and
At this point we define
where
and
Finally, we also define
and by
Moreover, assume
By directly computing we may obtain that for such specified real constants, is concave in on
Indeed, recalling that
and
we obtain
in and
in .
Considering such statements and definitions, we may prove the following theorem.
Theorem 5.
Let be such that
and be such that
Under such hypotheses, we have
so that
Proof.
Observe that so that, since concave in on , and is quadratic in , we get
Consequently, from this and the Min-Max Theorem, we obtain
Now we are going to show that
From
we have
and thus
Finally, denoting
from
we have
so that
Observe now that
so that
The solution for this last equation is obtained through the relation
so that from this and (49), we get
Thus,
and
and hence, from the concerning convexity in u on V,
Moreover, from the Legendre transform properties
so that
Joining the pieces, we have got
The proof is complete.
□
7. A Third Duality Principle and Related Convex Dual Variational Formulation
In this section, we assume a finite dimensional version for the model in question, in a finite differences or finite elements context, although the concerning spaces and operators have not been relabeled.
Again, for an open, bounded, connected set with a regular (Lipschitzian) boundary , , and , we denote , and by
and
We define also
and and by
and
At this point we define
where
and
By direct computation we may obtain
so that is convex.
Finally, we also define
And by
We assume and
Recalling that
and
we obtain
in and
Also,
where
and
Observe that at a critical point and so that, for the dual formulation, we set the restrictions and
Thus, we define
and
Observe also that
on , so that is convex on
Considering such statements and definitions, we may prove the following theorem.
Theorem 6.
Let be such that
and be such that
Under such hypotheses, we have
so that
Proof.
Observe that so that, since convex on the convex set , we have that
Now we are going to show that
From
we have
and thus
Finally, denoting
from
we have
so that
Observe now that
so that
The solution for this last equation is obtained through the relation
so that from this and (49), we get
Thus,
and
and hence, from the concerning cocavity in u on V,
Moreover, from the Legendre transform properties
so that
Finally, observe that
where we recall that .
Joining the pieces, we have got
The proof is complete.
□
8. Closely Related Primal-Dual Variational Formulations
Consider again the functional where
where , , , and
Observe that
Having obtained , we propose the following exactly penalized primal-dual formulation , where
so that
In particular, if we set
and
we may also define
where
for appropriate
Here we highlight that is concave in on (indeed it is concave on ) and the parameter multiplying a positive definite quadratic functional in u improves the convexity conditions of .
9. One More Duality Principle Suitable for the Primal Formulation Global Optimization
In this section we establish one more duality principle and related convex dual formulation suitable for a global optimization of the primal variational formulation.
Let be an open, bounded, connected set with a regular (Lipschitzian) boundary denoted by
For the primal formulation, we define and consider a functional where
Here we assume , and define
and
for an appropriate constant to be specified.
Define also the functionals , and by
and
for appropriate positive constants to be specified.
Moreover, define and and by
and
for appropriate and and
Furthermore, we define
for an appropriate constant to be specified.
Define also
and by
Moreover, assuming .
By directly computing denoting
we may obtain, considering that
on
Moreover,
where
and
At a critical point we have and
With such results, we may define the restrictions
Here, we define
On the other hand, clearly we have
From such results, we may obtain that in convex in and it is concave in on
The Main Duality Principle and a Related Convex Dual Formulation
Considering the statements and definitions presented in the previous section, we may prove the following theorem.
Theorem 7.
Let be such that
and be such that
Assume also
Under such hypotheses, we have
and
Proof.
Observe that so that, since is convex in and
we obtain
Consequently, from this and the Saddle Point Theorem, we obtain
Now we are going to show that
From
and
we have
and
Observe now that
Denoting
there exists such that
and
so that
Summarizing, we have got
From such results and the Legendre tranform proprieties we get
and
On the other hand, from the variation of in , we have
From such results, since
we get
Finally, from the variation of in we obtain
so that
Thus,
Consequently, from such last results, we have
Summarizing,
Furthermore, also from such last results and the Legendre transform properties, we have
so that
Finally, observe that
Therefore,
so that
Summarizing, we have got
Joining the pieces, we have got
The proof is complete.
□
10. A Related Numerical Computation through the Generalized Method of Lines
We start by recalling that the generalized method of lines was originally introduced in the book entitled "Topics on Functional Analysis, Calculus of Variations and Duality" [7], published in 2011.
Indeed, the present results are extensions and applications of previous ones which have been published since 2011, in books and articles such as [5,7,8,9]. About the Sobolev spaces involved we would mention [1]. Concerning the applications, related models in physics are addressed in [4,11].
We also emphasize that, in such a method, the domain of the partial differential equation in question is discretized in lines (or more generally, in curves) and the concerning solution is written on these lines as functions of boundary conditions and the domain boundary shape.
In fact, in its previous format, this method consists of an application of a kind of a partial finite differences procedure combined with the Banach fixed point theorem to obtain the relation between two adjacent lines (or curves).
In the present article, we propose an improvement concerning the way we truncate the series solution obtained through an application of the Banach fixed point theorem to find the relation between two adjacent lines. The results obtained are very good even as a typical parameter is very small.
In the next lines and sections we develop in details such a numerical procedure.
10.1. About a Concerning Improvement for the Generalized Method of Lines
Let where
Consider the problem of solving the partial differential equation
Here
, and
In a partial finite differences scheme, such a system stands for
with the boundary conditions
and
Here N is the number of lines and
In particular, for we have
so that
We solve this last equation through the Banach fixed point theorem, obtaining as a function of
Indeed, we may set
and
Thus, we may obtain
Similarly, for , we have
We solve this last equation through the Banach fixed point theorem, obtaining as a function of and
Indeed, we may set
and
Thus, we may obtain
Now reasoning inductively, having
we may get
We solve this last equation through the Banach fixed point theorem, obtaining as a function of and
Indeed, we may set
and
Thus, we may obtain
We have obtained ,
In particular, so that we may obtain
Similarly,
an so on, up to obtaining
The problem is then approximately solved.
10.2. Software in Mathematica for Solving Such an Equation
We recall that the equation to be solved is a Ginzburg-Landau type one, where
Here
, and In a partial finite differences scheme, such a system stands for
with the boundary conditions
and
Here N is the number of lines and
At this point we present the concerning software for an approximate solution.
Such a software is for (10 lines) and .
************************************
- ;
- ;
- ; (
- ;
- ;
- ;
-
- ;
- ];
*************************************
The numerical expressions for the solutions of the concerning lines are given by
10.3. Some Plots Concerning the Numerical Results
In this section we present the lines related to results obtained in the last section.
Indeed, we present such mentioned lines, in a first step, for the previous results obtained through the generalized of lines and, in a second step, through a numerical method which is combination of the Newton’s one and the generalized method of lines. In a third step, we also present the graphs by considering the expression of the lines as those also obtained through the generalized method of lines, up to the numerical coefficients for each function term, which are obtained by the numerical optimization of the functional J, below specified. We consider the case in which and .
For the procedure mentioned above as the third step, recalling that lines, considering that , we may approximately assume the following general line expressions:
Defining
and
we obtain by numerically minimizing J.
Hence, we have obtained the following lines for these cases. For such graphs, we have considered 300 nodes in x, with as units in
For the Lines 2, 4, 6, 8, through the generalized method of lines, please see Figure 1, Figure 4, Figure 7, Figure 10.
For the Lines 2, 4, 6, 8, through a combination of the Newton’s and the generalized method of lines, please see Figure 2, Figure 5, Figure 8, Figure 11.
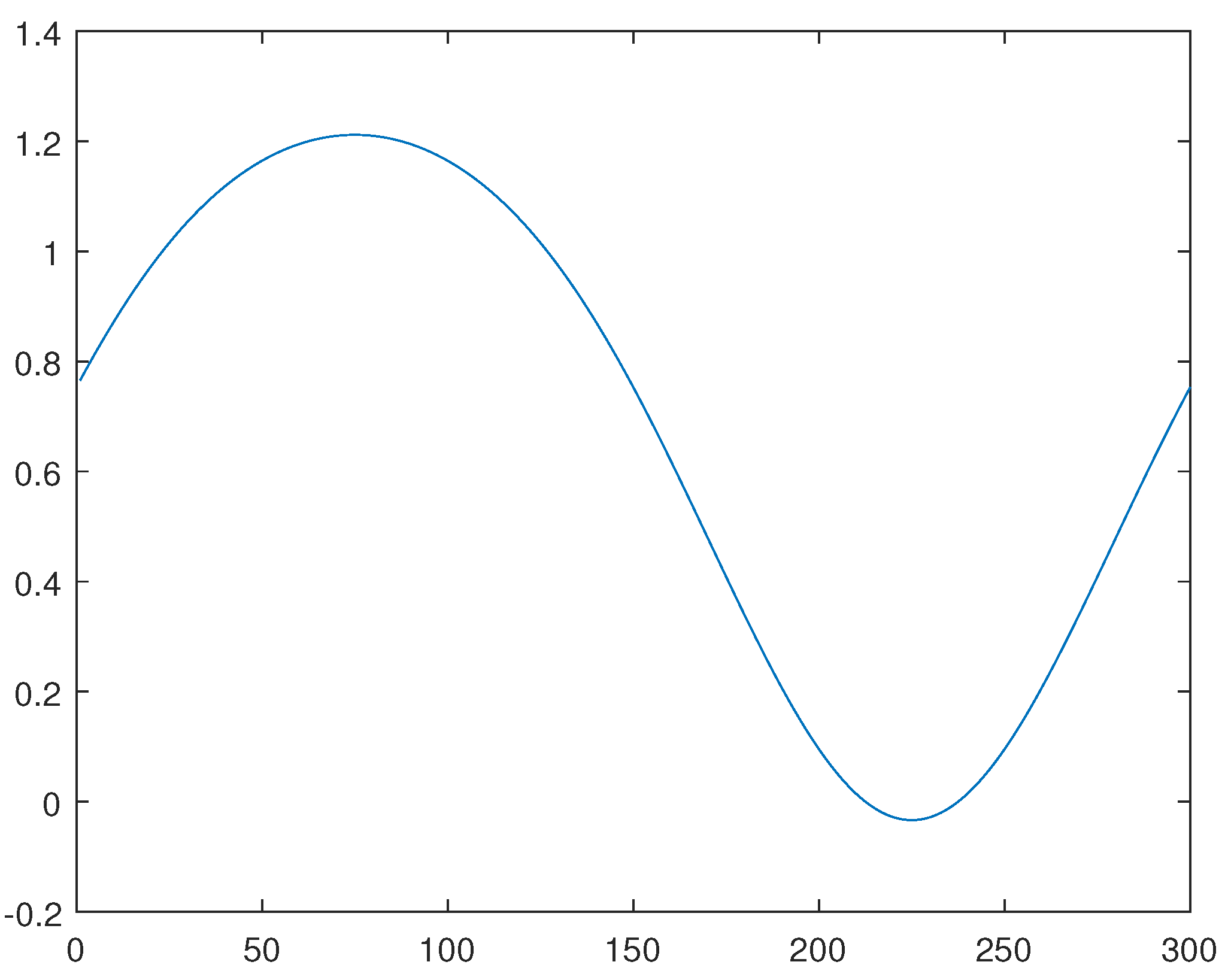
Finally, for the Line 2, 4, 6, 8 obtained through the minimization of the functional J, please see Figure 3, Figure 6, Figure 9, Figure 12.
Figure 1.
Line 2, solution through the general method of lines
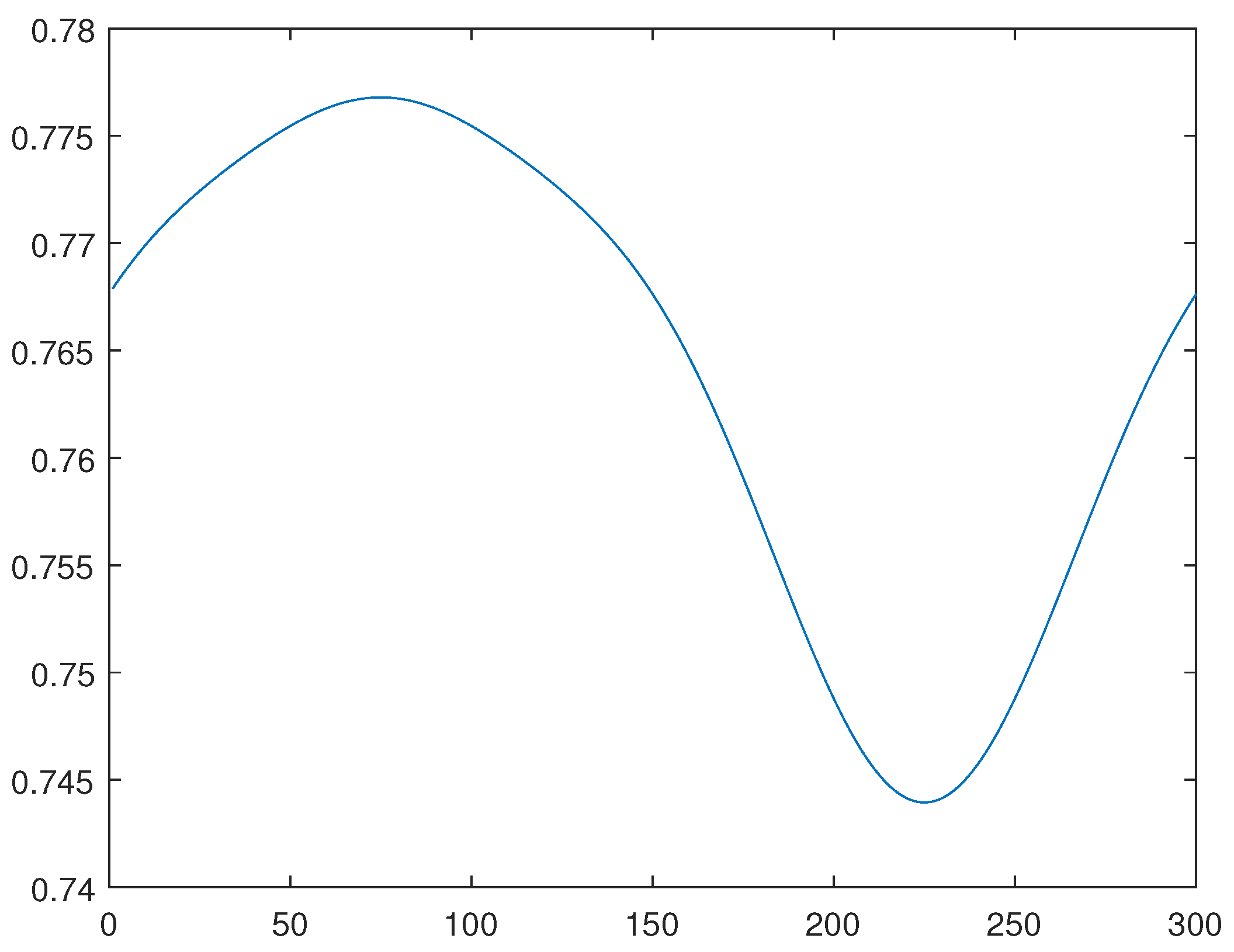
Figure 2.
Line 2, solution through the Newton’s Method
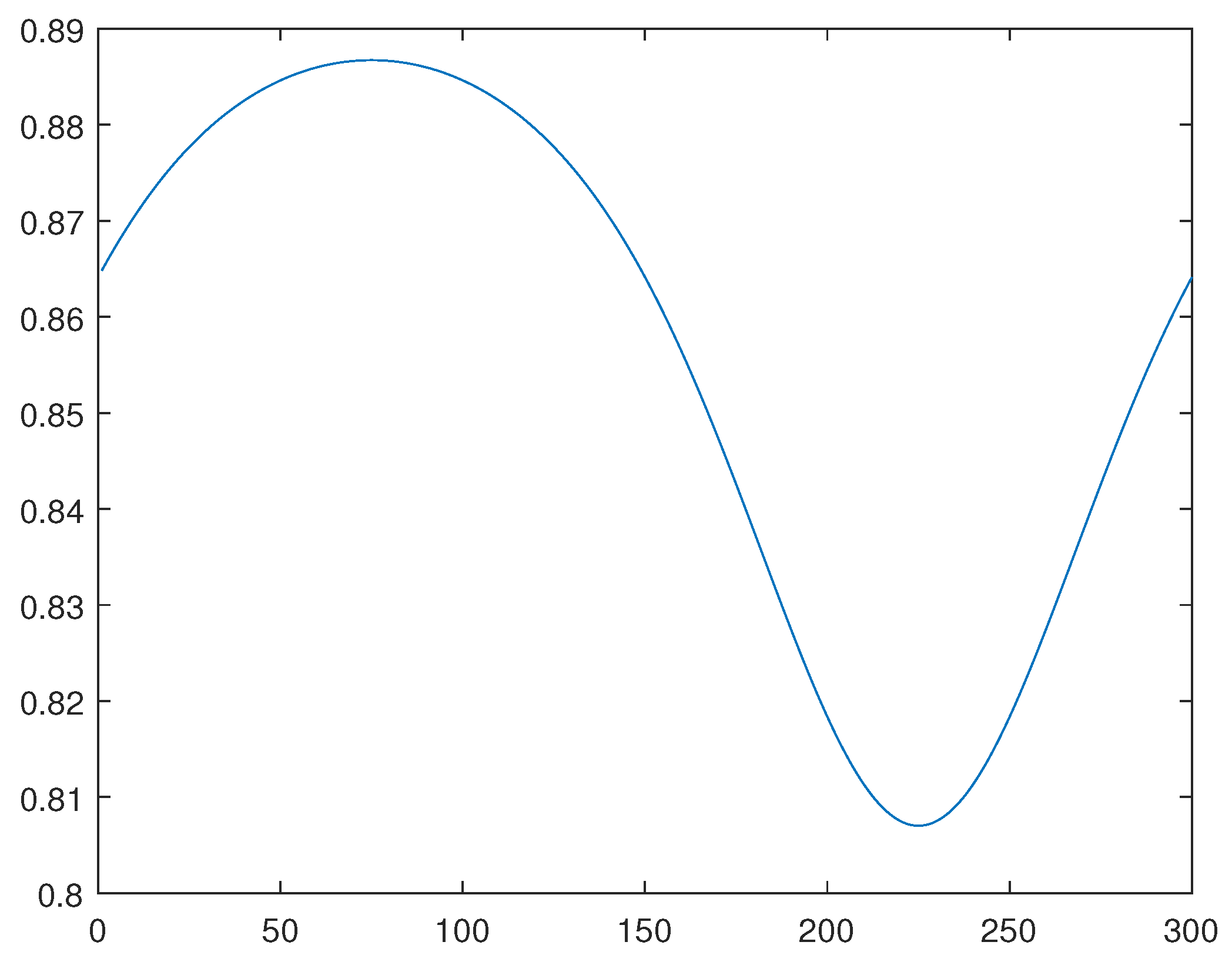
Figure 3.
Line 2, solution through the minimization of functional J
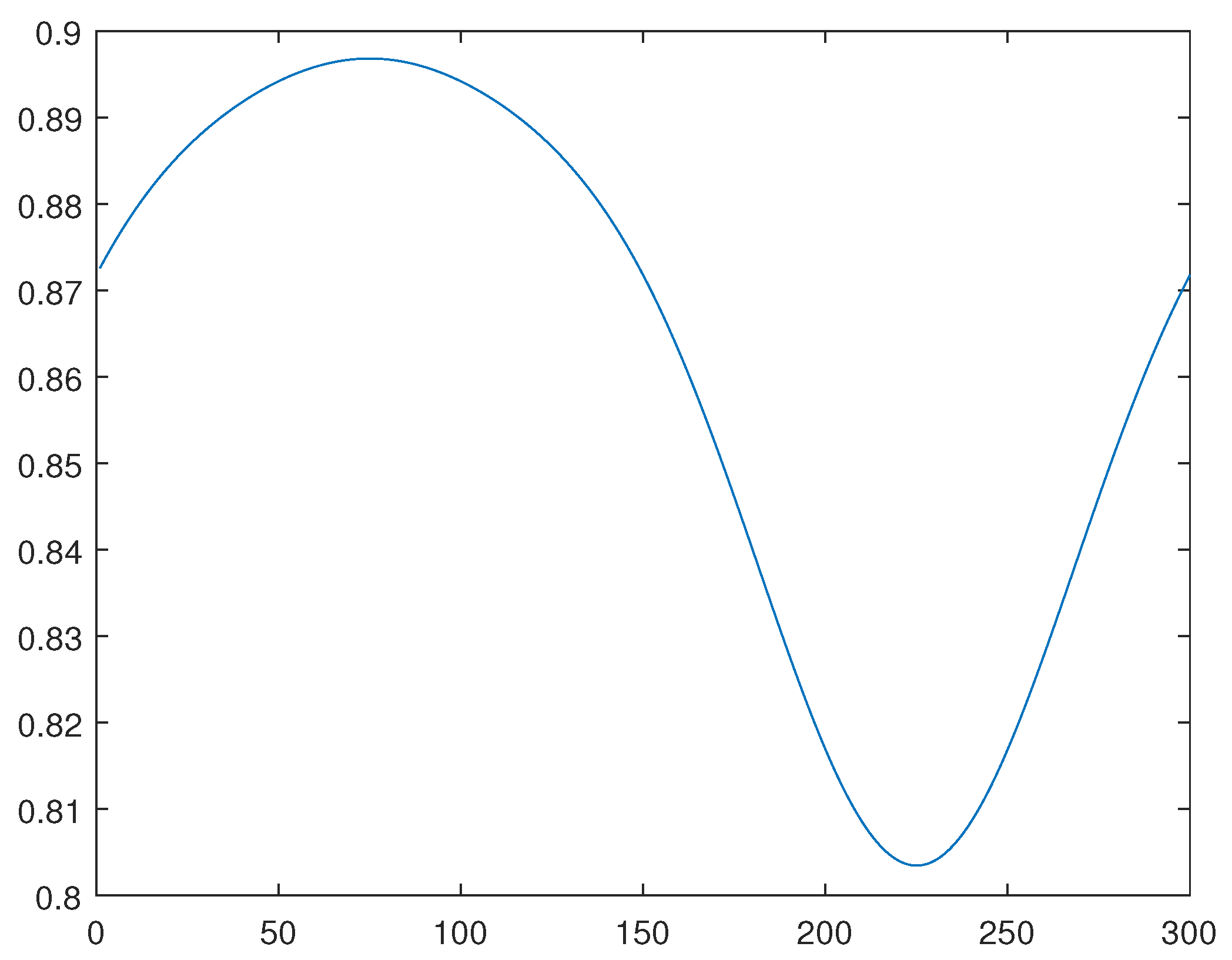
Figure 4.
Line 4, solution through the general method of lines
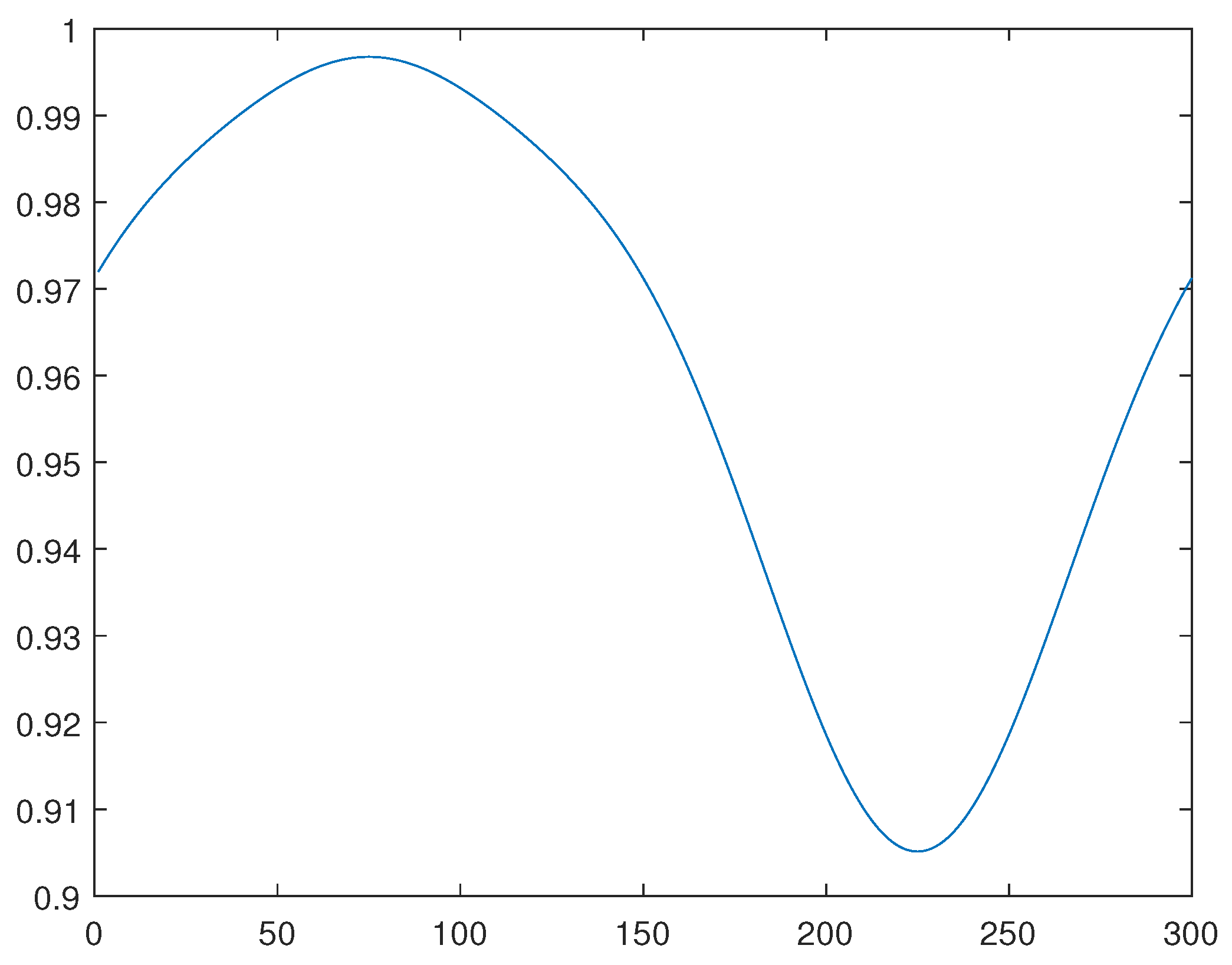
Figure 5.
Line 4, solution through the Newton’s Method
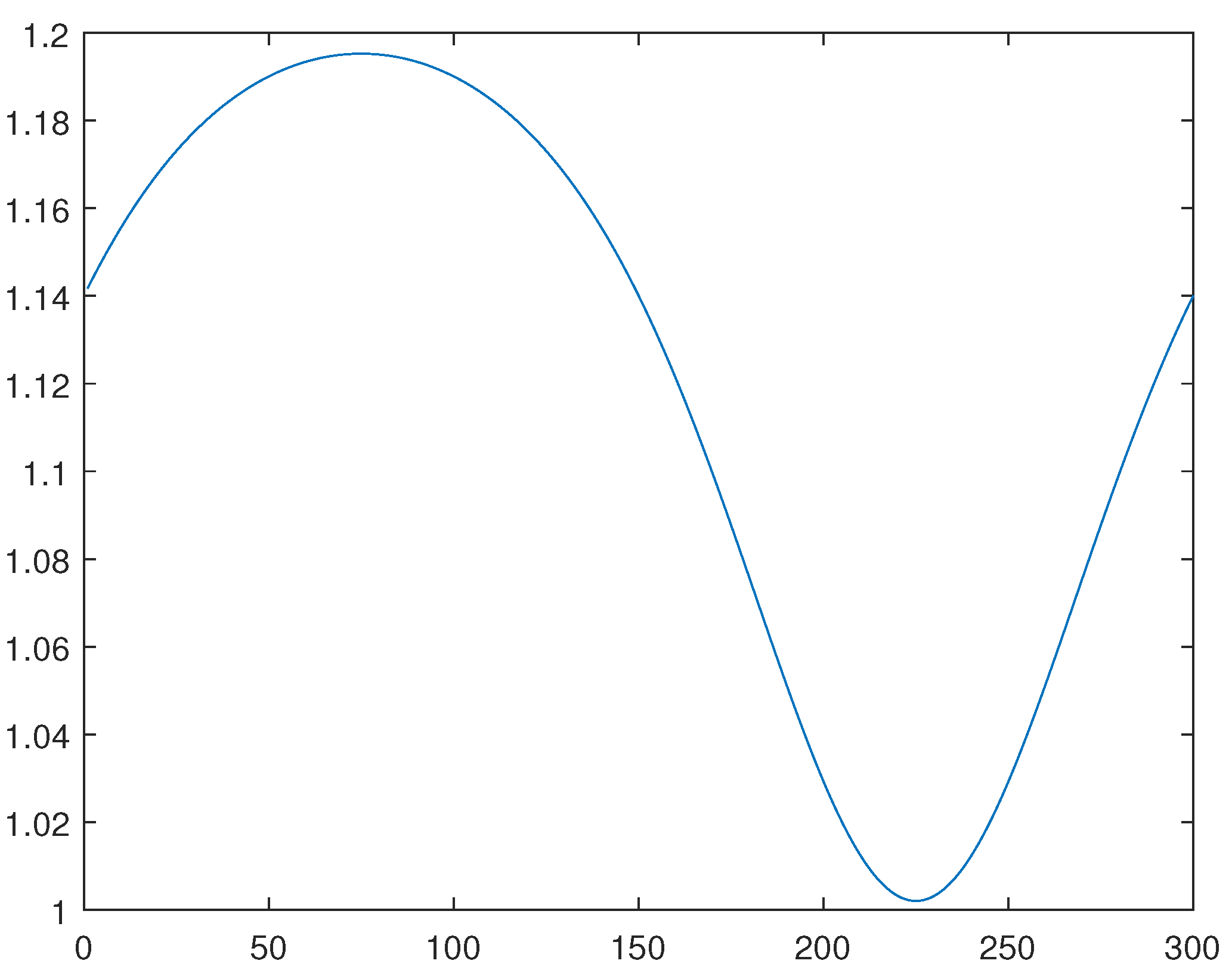
Figure 6.
Line 4, solution through the minimization of functional J
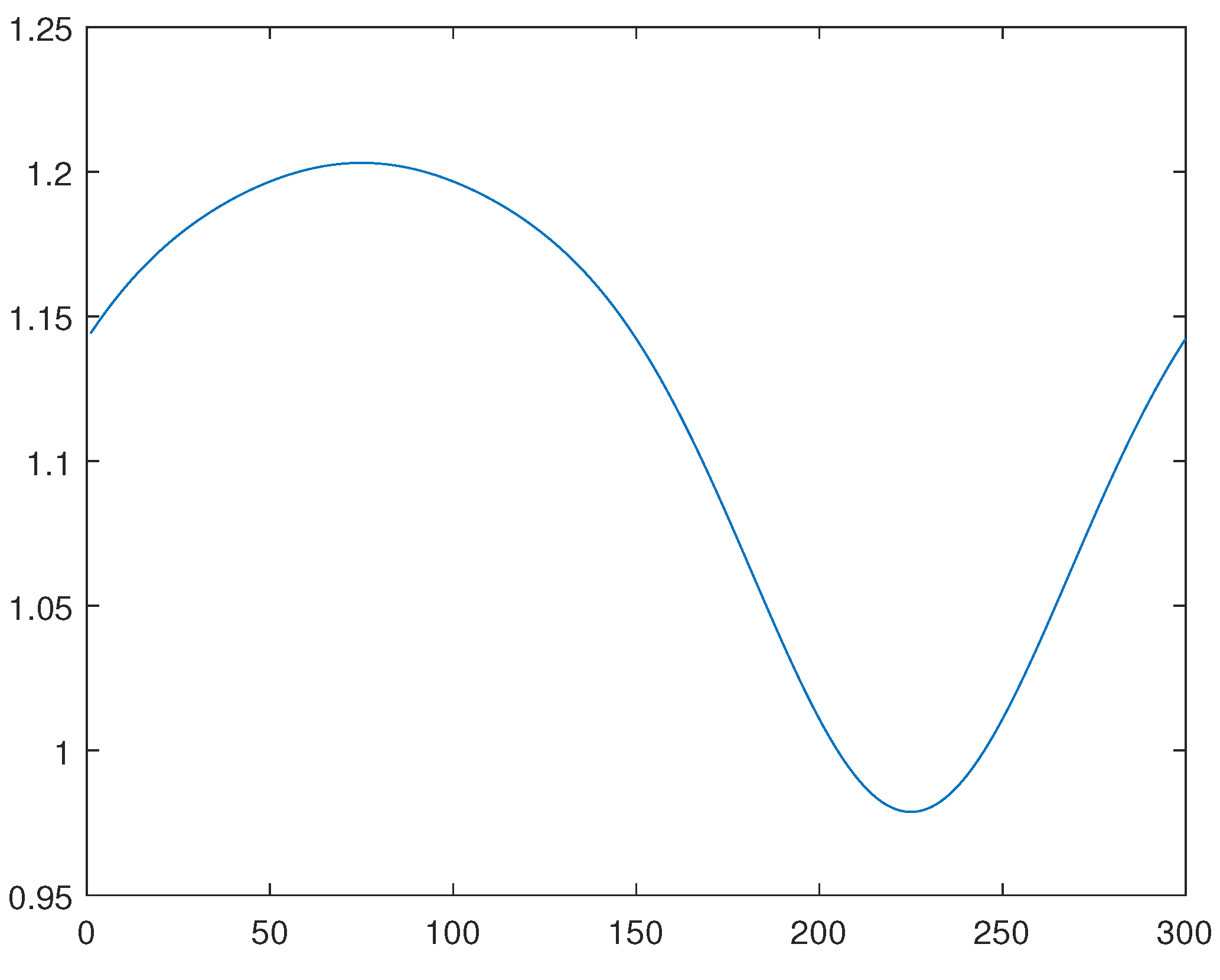
Figure 7.
Line 6, solution through the general method of lines
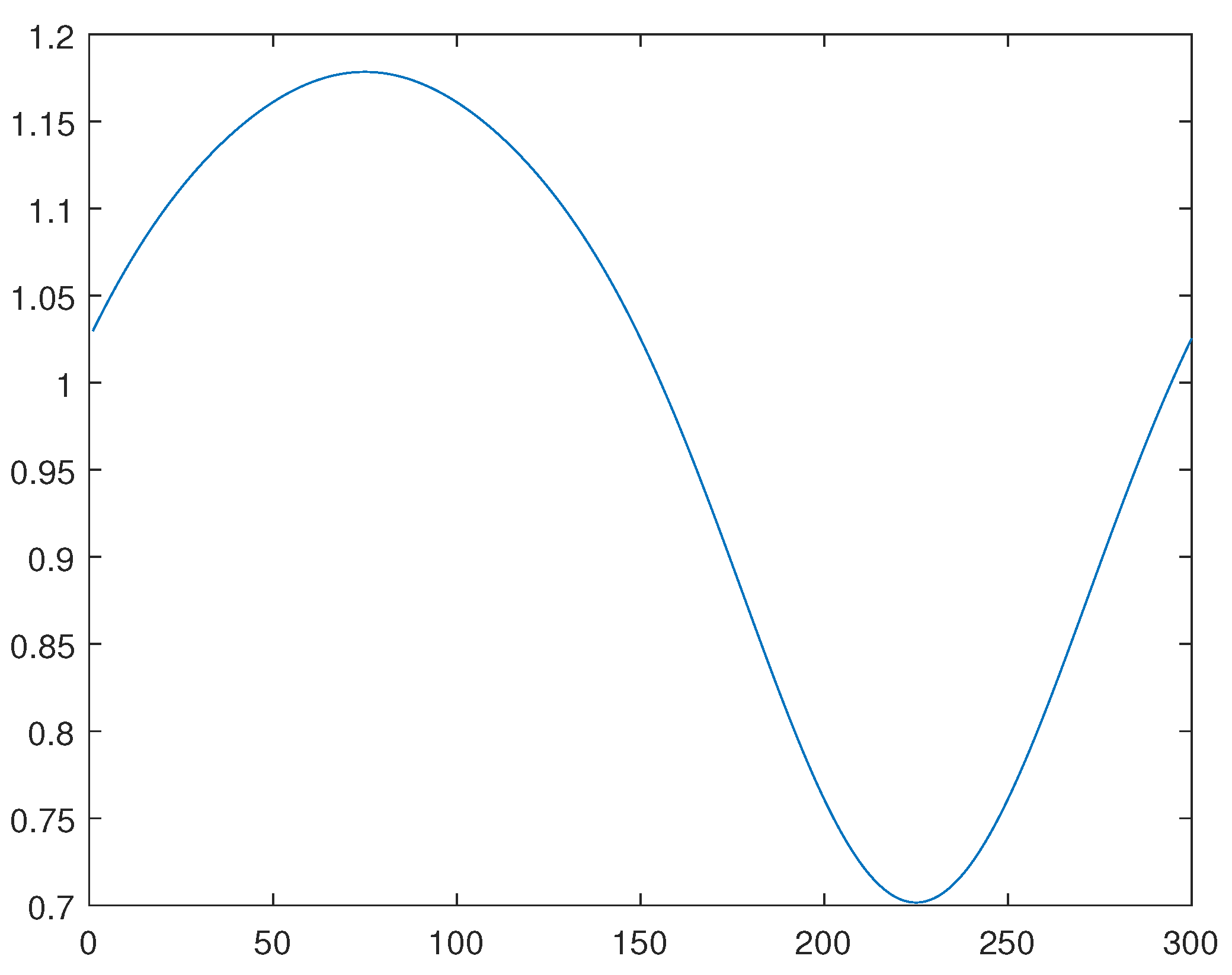
Figure 8.
Line 6, solution through the Newton’s Method
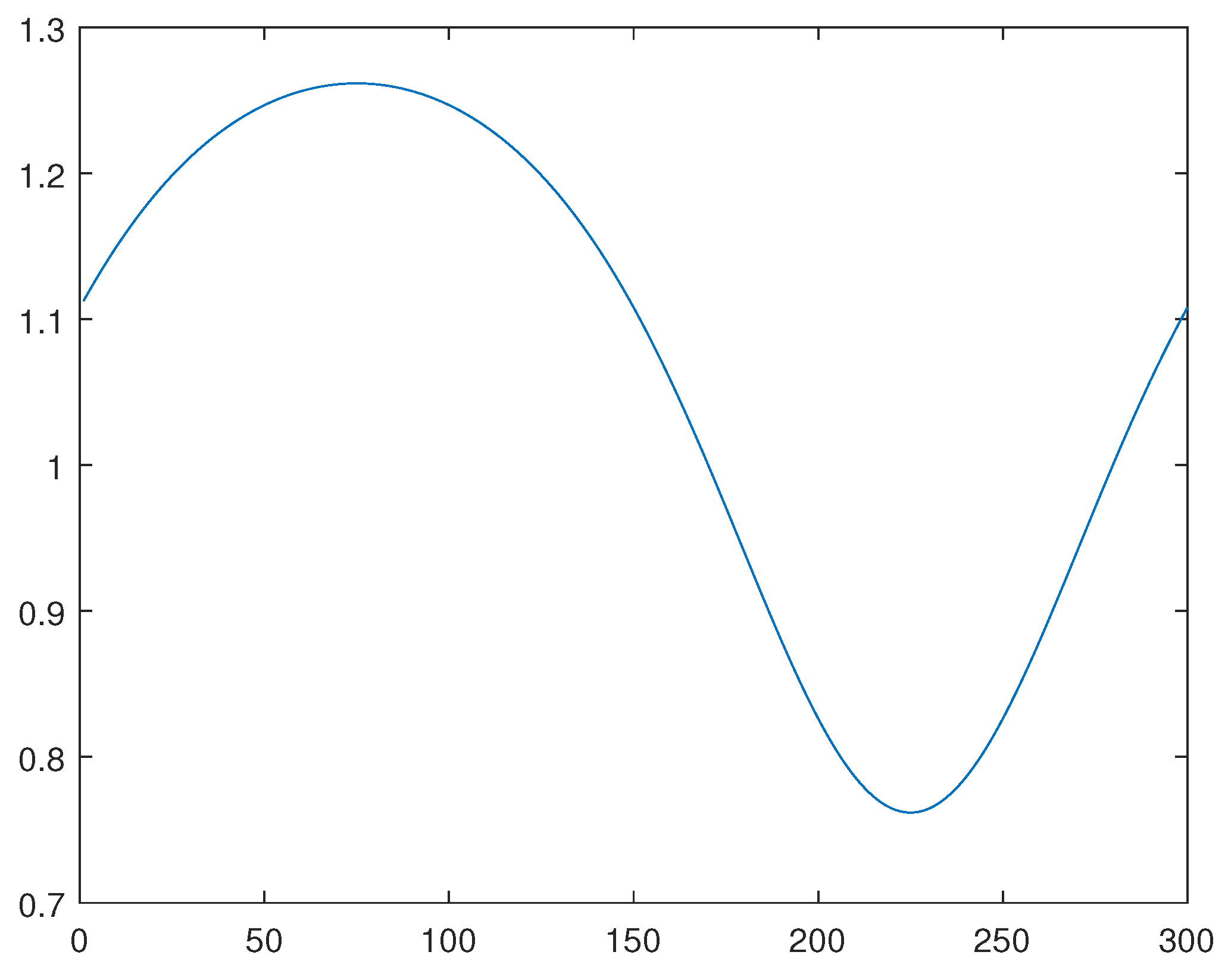
Figure 9.
Line 6, solution through the minimization of functional J
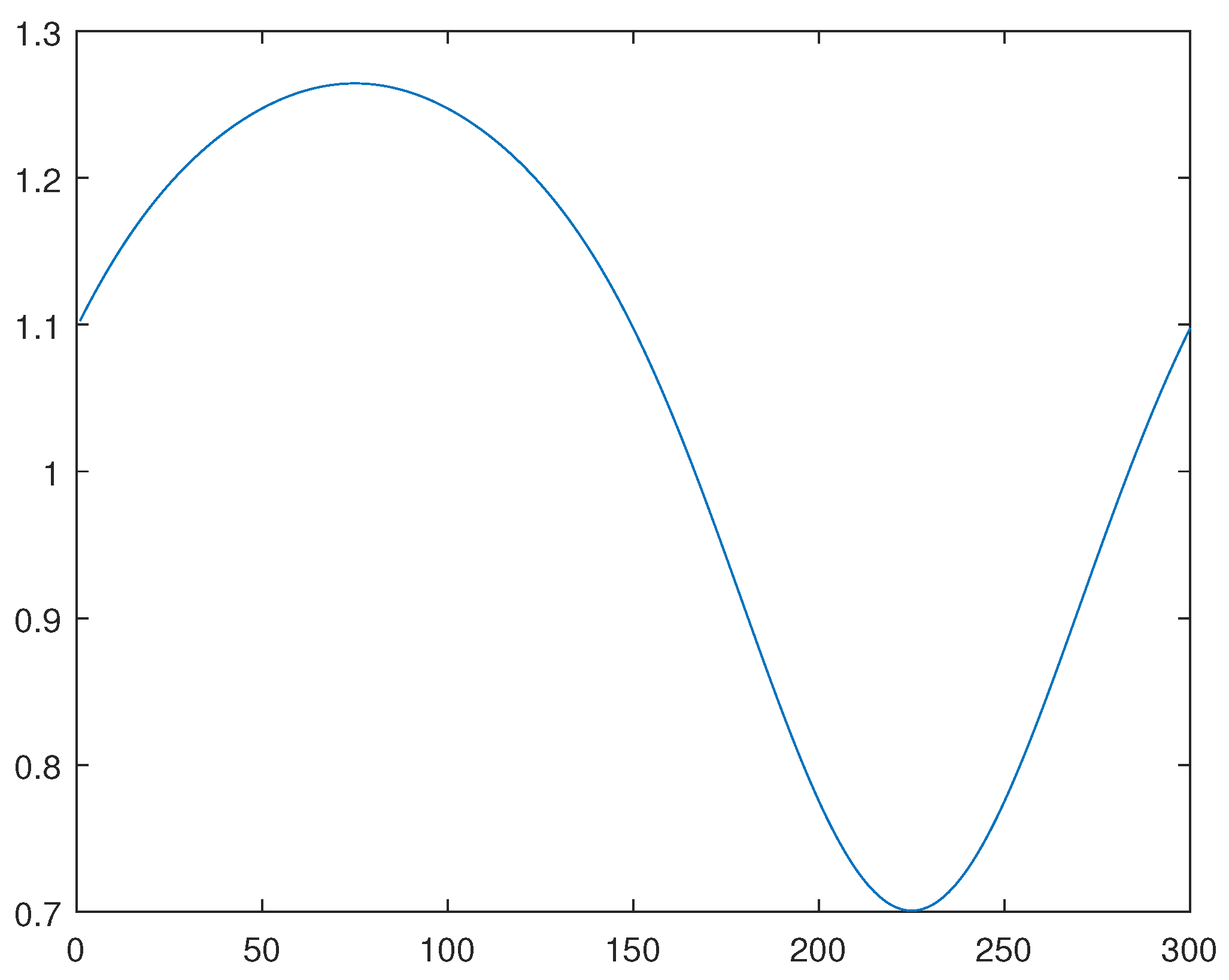
Figure 10.
Line 8, solution through the general method of lines
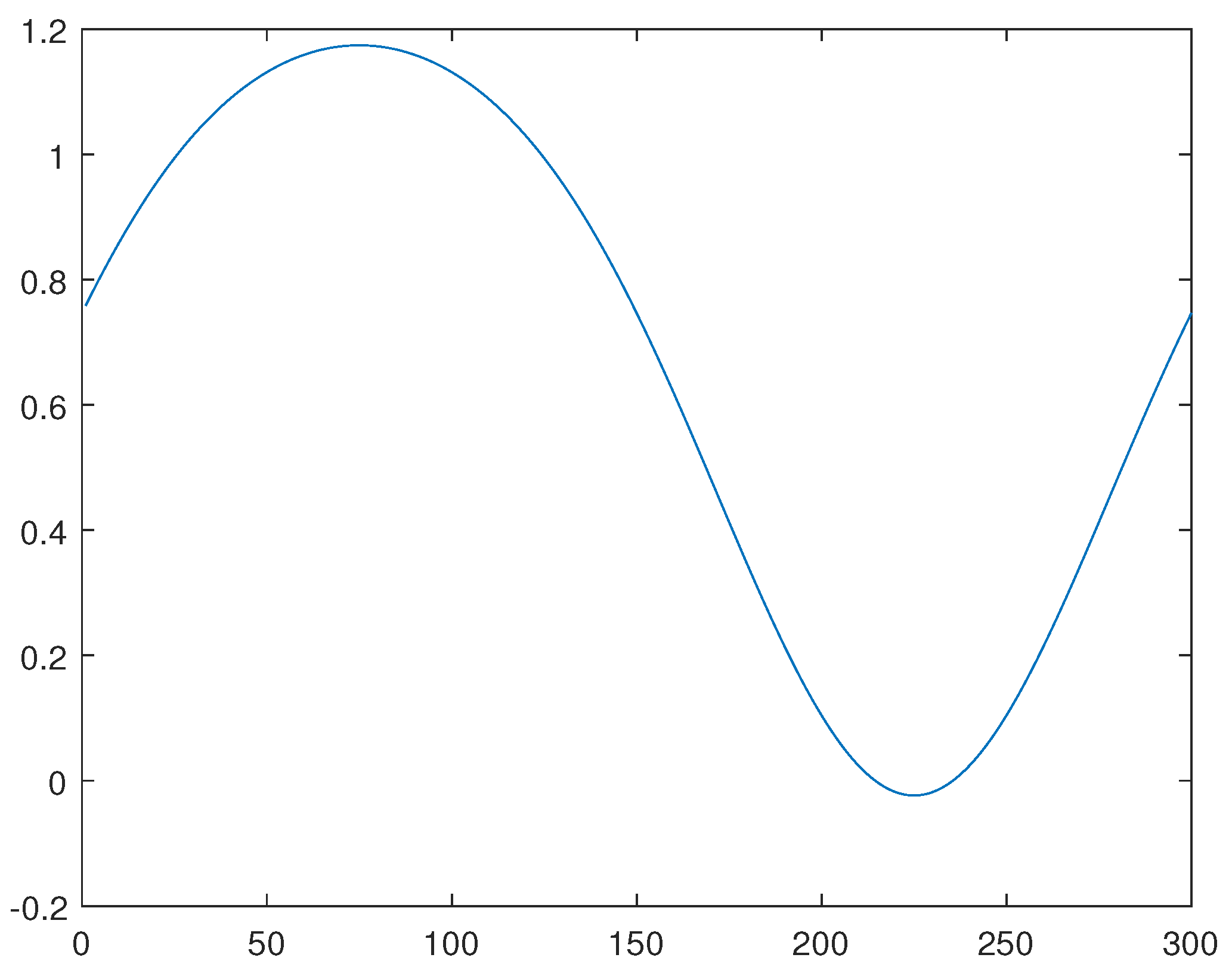
Figure 11.
Line 8, solution through the Newton’s Method
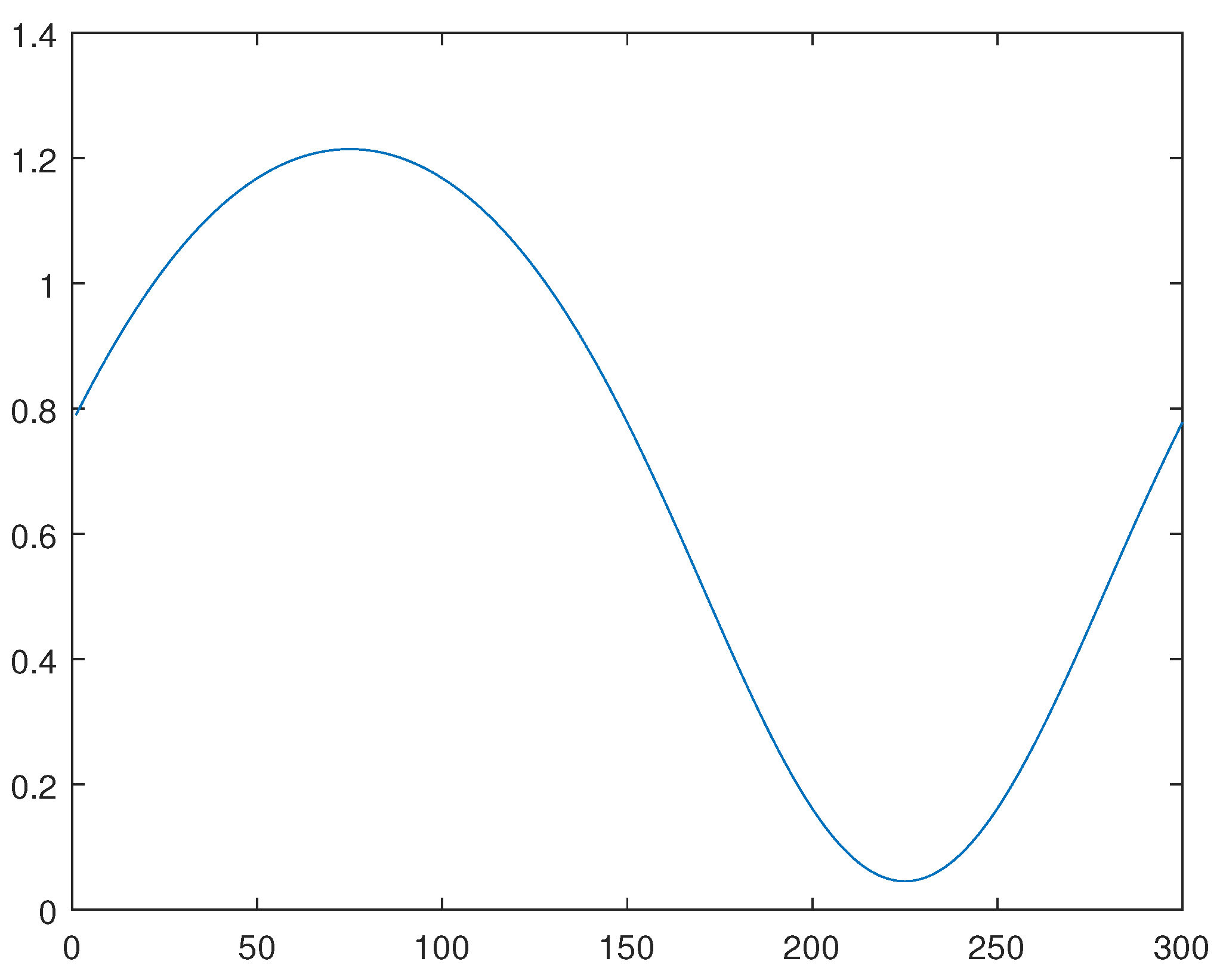
Figure 12.
Line 8, solution through the minimization of functional J
11. Conclusions
In the first part of this article we develop duality principles for non-convex variational optimization. In the final concerning sections we propose dual convex formulations suitable for a large class of models in physics and engineering. In the last article section, we present an advance concerning the computation of a solution for a partial differential equation through the generalized method of lines. In particular, in its previous versions, we used to truncate the series in however, we have realized the results are much better by taking line solutions in series for and its derivatives, as it is indicated in the present software.
This is a little difference concerning the previous procedure, but with a great result improvement as the parameter is small.
Indeed, with a sufficiently large N (number of lines), we may obtain very good qualitative results even as is very small.
References
- R.A. Adams and J.F. Fournier, Sobolev Spaces, 2nd edn. (Elsevier, New York, 2003).
- W.R. Bielski, A. Galka, J.J. Telega, The Complementary Energy Principle and Duality for Geometrically Nonlinear Elastic Shells. I. Simple case of moderate rotations around a tangent to the middle surface. Bulletin of the Polish Academy of Sciences, Technical Sciences, Vol. 38, No. 7-9, 1988.
- W.R. Bielski and J.J. Telega, A Contribution to Contact Problems for a Class of Solids and Structures, Arch. Mech., 37, 4-5, pp. 303-320, Warszawa 1985.
- J.F. Annet, Superconductivity, Superfluids and Condensates, 2nd edn. 2010.
- F.S. Botelho, Functional Analysis, Calculus of Variations and Numerical Methods in Physics and Engineering, CRC Taylor and Francis, Florida, 2020.
- F.S. Botelho, Variational Convex Analysis, Ph.D. thesis, Virginia Tech, Blacksburg, VA -USA, (2009).
- F. Botelho, Topics on Functional Analysis, Calculus of Variations and Duality, Academic Publications, Sofia, (2011).
- F. Botelho, Existence of solution for the Ginzburg-Landau system, a related optimal control problem and its computation by the generalized method of lines, Applied Mathematics and Computation, 218, 11976-11989, (2012).
- F. Botelho, Functional Analysis and Applied Optimization in Banach Spaces, Springer Switzerland, 2014.
- J.C. Strikwerda, Finite Difference Schemes and Partial Differential Equations, SIAM, second edition (Philadelphia, 2004).
- L.D. Landau and E.M. Lifschits, Course of Theoretical Physics, Vol. 5- Statistical Physics, part 1. (Butterworth-Heinemann, Elsevier, reprint 2008).
- R.T. Rockafellar, Convex Analysis, Princeton Univ. Press, (1970).
- J.J. Telega, On the complementary energy principle in non-linear elasticity. Part I: Von Karman plates and three dimensional solids, C.R. Acad. Sci. Paris, Serie II, 308, 1193-1198; Part II: Linear elastic solid and non-convex boundary condition. Minimax approach, ibid, pp. 1313-1317 (1989).
- A.Galka and J.J.Telega Duality and the complementary energy principle for a class of geometrically non-linear structures. Part I. Five parameter shell model; Part II. Anomalous dual variational priciples for compressed elastic beams, Arch. Mech. 47 (1995) 677-698, 699-724.
- J.F. Toland, A duality principle for non-convex optimisation and the calculus of variations, Arch. Rat. Mech. Anal., 71, No. 1 (1979), 41-61.
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



MDPI Initiatives
Important Links
© 2024 MDPI (Basel, Switzerland) unless otherwise stated