
Submitted:
03 February 2023
Posted:
06 February 2023
You are already at the latest version
Abstract
In the last decades, the automatic recognition and interpretation of brain waves acquired by electroencephalographic (EEG) technologies have undergone remarkable growth, leading to a consequent rapid development of Brain Computer Interfaces (BCIs). EEG-based BCIs are non-invasive systems that allow communication between a human being and an external device interpreting brain activity directly. Thanks to the advances in neurotechnologies, and especially in the field of wearable devices, BCIs are now also employed outside medical and clinical applications. Within this context, this paper proposes a systematic review of EEG-based BCIs, focusing on one of the most promising paradigms based on Motor Imagery (MI) and limiting the analysis to applications that adopt wearable devices. This review aims to evaluate the maturity levels of these systems, both from the technological and computational points of view. The selection of papers has been performed following the Preferred Reporting Items for Systematic Reviews and Meta-Analyses (PRISMA), leading to 84 publications considered in the last ten years (from 2012 to 2022). Besides technological and computational aspects, this review also aims at systematically list experimental paradigms and available datasets in order to identify benchmarks and guidelines for the development of new applications and computational models.
Keywords:
electroencephalogram (EEG)
; brain computer interface (BCI)
; motor imagery (MI)
; wearable devices
1. Introduction
From the pioneering work of Hans Berger that recorded the first human electroencephalographic signal (EEG) in 1924 [1], the research devoted to detecting and analyzing brain waves has increased exponentially over the years, especially in medical contexts for both diagnostic and health care applications.
The automatic recognition and interpretation of brain waves permit the development of systems that allow subjects to interact and control devices through brain signals and thus provide new forms for human-machine interactions through systems called Brain Computer Interfaces (BCIs).
Several applications have been developed, especially for assistive and rehabilitative purposes [2].
However, in the last decades, the rapid development of neurotechnologies, particularly wearable devices, has opened new perspectives and applications outside the medical field, including education, entertainment, civil, industrial, and military fields [3]. Among the different BCI paradigms, Motor Imagery (MI) deserves particular attention, having that it can be used for a variety of applications and knowing that the research community has achieved promising results in terms of performances [4].
Starting from these premises, this paper systematically reviews EEG-based MI-BCIs by following the Preferred Reporting Items for Systematic Reviews and Meta-Analyses (PRISMA) suggestions [5].
The main research question of this review paper is:
- RQ: Are wearable technologies mature for EEG-based MI-BCI applications in uncontrolled environments?
To properly answer this question, four different sub-questions are considered here:
- RQ1: Is there a significant amount of EEG-based MI-BCI studies using wearable technologies in the literature that implies a promising future development of this research field, especially in uncontrolled environments and outside the medical and clinical settings?
- RQ2: Are there common pipelines of processing that can be adopted from signal acquisition to feedback generation?
- RQ3: Are there consolidated experimental paradigms for wearable EEG-based MI-BCI applications?
- RQ4: Are there datasets available for the research community to properly compare classification models and data analysis?
To face these questions, the work is structured as follows. Section 2 describes how the 84 papers for the proposed systematic review have been selected, following the PRISMA suggestions. Section 3 reports basic knowledge concepts of electroencephalographic signals, brain computer interfaces, motor imagery and wearable technologies, to provide a proper background for the comprehension of the next sections. To properly identify the contribution of this work, an overview of other survey articles present in the literature and concerning BCI systems is reported in Section 4. Section 5 is the core of this review paper, reporting systematically the motor imagery brain computer interface wearable systems found in the state of the art, in terms of applications, and employed technologies. A detailed description of signal processing, feature engineering, and classification and data analysis is also reported, together with the description of all the datasets and experimental paradigms adopted. A particular attention has been given in some sections to those papers that can be reproducible, either because the analyzed dataset is available, or because the computational models adopted are described with proper technical details. All information gathered from the 84 publications considered will be made available as supplementary material, organized in a detailed table (EEG-MI-BCI-Table).
Finally, the answers to the presented research questions have been provided in Section 6, taking into consideration the detailed analyses on the different aspects discussed in the previous sections.
2. Systematic review search method
The Preferred Reporting Items for Systematic Reviews and Meta-Analyses (PRISMA) [5] has been employed to conduct this systematic review.
2.1. Eligibility criteria
The papers included in the systematic review needed to present studies on EEG-based BCIs considering motor imagery paradigms and the usage of wearable technologies for signal acquisition. Moreover, the following inclusion criteria were applied:
- Studies published in the last 10 years (from January 01, 2012 to June 22, 2022).
- Studies published as journal articles, conference proceedings, and dataset reports.
Papers falling in the following criteria were excluded:
- Non-English articles.
- Studies published as meeting abstracts, book chapters, posters, reviews, and Master and PhD dissertations.
Following these criteria, studies were initially identified by the search engines defined in Section 2.2 by applying their filters, when present. Afterwards, a manual scanning was conducted on titles, keywords, abstracts, and data description sections of the publications by dividing the studies extracted from the search engines equally among the review authors.
2.2. Information sources
Seven search engines have been used to collect works on EEG-based BCIs concerning motor imagery paradigms and wearable technologies: IEEE Xplore, Mendeley, PubMed, ScienceOPEN, Sematic Scholar, Scopus, and Web of Science.
Google Scholar was also consulted to retrieve more information on some of the publications outputted from the other search engines and papers that were already stored in private repositories of the different research groups. For the final set of reviewed papers, the last consultation date will be reported for completeness. Table 1 reports information for each search engine specifying the authors that used it and its last consultation date.
2.3. Search strategy
The works included for manual screening were the outcome of the search conducted by querying the information sources described in Section 2.2 with the following keywords: (EEG OR eeg OR electroencephalographic OR electroencephalography) AND (BCI OR brain computer interface OR bci) AND (wearable OR wireless) AND (motor imagery OR motor-imagery OR MI).
However, before considering this final group of keywords and to understand the interest of the research community on the specific topic of EEG-based MI-BCIs with wearable technologies, we restricted the queries to a combination of the provided keywords, obtaining the results reported in Table 2.
Notice that Google Scholar is not reported, being used only to retrieve information on papers present in private repositories or additional details on the scraped ones.
Observing the table and making a comparison between the refined searches in respect to the more general one on EEG and BCI related papers, it appears that:
- a mean (std) of 4.76% (4.98%) works of the EEG & BCI search are present in the EEG & BCI & wearable field;
- a mean (std) of 26.01% (9.38%) works of the EEG & BCI search are present in the EEG & BCI & MI field;
- a mean (std) of 0.71% (0.65%) works of the EEG & BCI search are present in the EEG & BCI & wearable & MI field, target of the present survey.
Therefore, the interest on EEG-based MI-BCIs with wearable technologies has yet to have a broader dissemination in the research community. Wearable technologies seem to be discussed, while the field of MI is extremely prolific.
All the queries followed the eligibility criteria described in Section 2.1, but where not searched for duplicates and manual screened. This procedures were applied only on the last target query.
2.4. Search outcome
Following the previously described search strategies and filtering the results according to the established inclusion and exclusion criteria, 84 papers were included in the present review.
Figure 1 depicts the flow diagram obtained by following the PRISMA guidelines. Notice that the diagram is divided in two main sections. The first concerns the works retrieved through the search engines listed in Section 2.2, while the second pertains to the studies in the research group’s personal repositories.
Duplicates were removed from the papers outputted by the search engines before the screening. Afterwards, abstract were manually checked by the authors ensuring that they present references to the keywords reported in Section 2.3. The number of abstracts to check were equally distributed among the authors. Reports were not retrieved if (i) already present in the personal repositories, (ii) not available online, (iii) they were review papers, posters or thesis. Finally, the papers were excluded after a through read of the works if unrelated to the BCI field and/or not presenting analyses on wearable devices.
Notice that each paper was read by at least two authors.
For completeness, Figure 2 depicts the number of papers remaining after the screening process per each considered year. According to the plot, most of the 84 works were published between 2019 and 2020, highlighting the rise in interest of the EEG community towards MI-BCI systems employing wearable technologies and thus further justifying our interest in the reviewed topic.
Notice that the scarce number of papers related to the 2022 label may not be representative of the hypothesized publication trend, since the scraping on 2022 publications stopped on June 22nd.
Detailed notes on the reviewed papers are included in the EEG-MI-BCI-Table as supplementary material to the present review. The notes are organized to provide a clear reference to the papers and to follow the core section of this review (Section 5), analyzing (i) field of applications, (ii) employed technologies, (iii) signal processing and analysis methodologies, (iv) BCI feedback, and (v) dataset information.
3. Background Information
This section is devoted to the explanation of some basic knowledge related to the target of this survey. Therefore, an overview on EEG signals, BCIs, MI and wearable technologies is provided.
3.1. Electroencephalogram
In this review, the considered applications are based on the use of the electroencephalogram (EEG) as a non-invasive technology to acquire brain signals. In fact, the EEG is able to record the brain electric potentials deriving from the activation of the cerebral cortex in response to cognitive processes [6], which could be spontaneous or evoked by external stimuli [7]. The resulting signal is a time series characterized by time, frequency (Section 3.1.1), and spatial information, and acquired with non-invasive sensors (called electrodes or channels) placed on the scalp of a subject [8,9,10,11]. Moreover, the electrode positioning usually follows standard placement systems, which define the distance between adjacent electrodes taking into consideration specific anatomical landmarks, like the distance from the nasion to the inion [12]. The most commonly used systems are the 10-20 and 10-10 International ones [12,13], which are depicted in Figure 3. Notice that the electrodes are identified by letters, which refer to the brain area pertaining a specific electrode, and a number (odd for the left hemisphere, even for the right one). The midline placement is identified by a z.
Therefore, the sensors are usually placed following standard locations that respects the brain anatomical structures. However, it could happen that the neural activations are not recorded uniformly or have irregular samples [14] and that the volume conduction effect may provide indirect and imprecise recordings [15].
Moreover, the EEG signals are [16] easily affected by noise, and thus have usually low Signal-to-Noise-Ratio (SNR) [7,17].
EEG data are also heterogeneous
- being non-stationary signals varying across time [18];
- being subject specific, due to the natural physiological differences between subjects [16];
- varying in a same subject depending on his/her physiological and psychological conditions, and changing from trial to trial [19];
Therefore, coupling the EEG signals with specific brain activities is a difficult and ambiguous task [20].
In the following, details on the frequency information characterizing the EEG signals and the noise affecting them will be given to provide a better overview of these peculiar data.
3.1.1. EEG Rhythms
As previously introduced, the EEG signal is characterized by frequency information, which are provided by different frequency bands, called rhythms, associated with specific brain activities and functions [21]. Table 3 provides a brief overview of the EEG rhythms and their frequency ranges.
Starting from the lowest frequency band, the delta () rhythm presents slow waves typical of infants or predominant during deep sleep [12,22]. The theta () rhythm is instead elicited by emotional stress and is present in sleepy adults [12,21,22]. During a relaxed, but awake state, the alpha () rhythm is elicited [21]. Notice that and mu () rhythms share similar frequency components, but is related to the motor cortex functionalities [22] and is usually non-sinusoidal [23]. The influence of the band on motor imagery tasks will be discussed in detail in Section 3.2.
Concerning the beta () rhythm, it is present in alert states due to active thinking or attention and may also be an effect of anxiety [12,21]. Finally, the gamma () rhythm is intertwined with more complex cognitive functions, like sensory stimulus recognition and two senses combination [12,22].
Knowing the EEG intrinsic frequency characteristics, it is possible to exploit them to design specific experimental paradigms and make assumptions on EEG data analyses.
3.2. Motor Imagery
For Motor Imagery (MI) is intended the imagined rehearsal of an actual movement [24,25]. During motor imagination, a person seems to consciously access motor representation, i.e., the intention of making a movement and a preparation to it, which is usually an operation performed unconsciously [26,27].
Moreover, the imagination can be performed using a first (internal) or third (external) person perspective [28]. In the first case the person should feel like he/she is performing the imagined movement; in the external perspective, the person should feel like watching him-/herself while performing the movement [28].
Furthermore, numerous researches have found out that motor imagery and representation present the same functional relationships and mechanisms [23,26,29,30], which results in the activation of the same brain areas when performing the actual movement and imagining it [27,31,32].
In fact, analyzing the EEG signals recorded from the primary sensorimotor cortex during the executed or imagined movement of specific body parts, variations in amplitude mainly of the and rhythms can be observed [29,30]. These non phase-locked-to-the-event variations are called Event-Related Desynchronization and Synchronization (ERD/ERS), corresponding to a decrease or increase of the rhythms amplitude, respectively [33].
Before performing a movement, the and rhythms are subject to an ERD [34,35]. Instead, the deactivation of the motor cortex due to movement stopping elicits an ERS on the frequency band [36].
These evidences justify the supporting role of MI training in motor execution improvement [27] and generally in the enhancement of neuroplasticity [24,37], i.e., the brain ability to change in response to new conditions [38]. Moreover, the MI-related phenomena can be easily exploited to provide a MI-based control of a BCI system [34].
However, the MI ability is subjective due to each individual differences and thus requires to be assessed before being exploited in experiments/applications, or to be trained [28,31]. Particularly in the field of MI-based BCIs, proper motor imagery task completion may require a long time and Kaiser et al. [39] affirm that a good BCI control is usually achieved when the subject is at least able to perform accurately the 70% of the required tasks.
3.3. Brain Computer Interfaces
In the last years, neurotechnologies faced great developments and have brought important solutions in the collection and analysis of physiological data in several fields. In particular, they allowed an advance in the identification and treatment of neurological diseases [40] in the medical sector.
Starting from these premises, Brain Computer Interfaces (BCIs) were born and progressed to provide on-line brain-machine communication systems [41], that allow the control of devices or applications by recording and analyzing brain waves.
The life cycle of current BCI systems is based on a standard architecture, defined by three main modules (Figure 4): the signal acquisition, processing and application module [42].
The signal acquisition module deals with the input of the BCI system and thus is responsible of recording the physiological signals, which are amplified and digitized. Afterwards, these data become the inputs of the signal processing module, which processes the signal in order to convert it into commands to an external device or application. Moreover, this module mainly performs (i) signal preprocessing, with the aim of increasing the signal-to-noise ratio [43] by removing artifacts; (ii) feature engineering to extract characterizing and significant information from the signal; (iii) classification to translate the signals and their features into machine readable commands.
Finally, the user application module provides the feedback to the BCI user.
Considering all the EEG-based BCI applications, distinctions can be made among motor imagery (described in Section 3.2), external stimulation paradigm, error related potentials, inner speech recognition, and hybrid paradigms [44,45].
The external stimulation paradigm refers to the fact that brain waves can be modified by external auditory, visual or somatosensory stimuli. Examples of this paradigm are the Event Related Potential (ERP) and the steady-state visual evoked potential (SSVEP). ERPs are characterized by components that identify a certain shape of the signal wave. One of the most studied ERPs in the BCI field is the P300, a component related to a positive signal deflection that creates a peak starting at 300 ms when an unexpected stimulus appears [46].
The SSVEP is instead a phenomenon consisting of a periodic component of the same frequency that occurs when a subject looks at a light source that flickers at a constant frequency. This occurs at frequencies in the range of 5-20 Hz and is mainly detectable in the occipital and temporal lobes [47]. The SSVEP paradigm has a great advantage: since the relative stimuli are exogenous, it is a no-training paradigm and thus should not require long training times.
When an error or a mismatch arises between the user performing a task and the response provided by the BCI system, an error related potential occurs (ErrP). ErrPs are potentials that represent the user’s perception of an occurrence of error in the BCI system. ErrPs are reliably detected on a single-trial basis, and thus have immense potentials in real-time BCI applications [48].
Moreover, new paradigms are progressively appearing in the literature concerning inner speech recognition, which is devoted to the identification of an internalized process where a person thinks in pure meanings, generally associated with an auditory imagery of own inner voice [45].
Even thought systems based on these paradigms seem to have a great number of advantages, BCI systems usually present some limitations and thus hybrid BCIs could be considered to overcome them [49]. Hybrid paradigms are usually employed by exploiting two or more of the described paradigms. In fact, as demonstrated by several studies [50,51,52], the combination of two or more paradigms can lead to a significant improvement in the performance of the BCI system. For example in [50] the authors combine P300 and SSVEP to create a high speed speller BCI system with more than 100 command codes.
As previously stated, EEG-based BCI systems are born for medical purposes, from neurorehabilitation to prevention, up to the identification of pathologies and diagnoses. For example, the EEG signals are used for the identification and prevention of epileptic seizures, and systems have been developed allowing their high detection and prediction accuracy, as well as a better localization of epileptic foci [40]. BCI systems are also used in the neurorehabilitation field, for example for the treatment of patients who suffer from motor disabilities after a stroke. In particular, motor imagery-based BCIs have proven to be an effective tool for post-stroke rehabilitation therapy through the use of different MI-BCI strategies, such as functional electric stimulation, robotics assistance and hybrid virtual reality based models [53]. BCIs are also used to detect health issues such as tumors, seizure disorder, sleep disorder, dyslexia and brain swelling such as encephalitis [54].
In addition to these medicals and neurological rehabilitation uses, there are many other fields of application of BCIs [54,55,56,57].
For example, the marketing sector uses EEG data to evaluate advertisements in terms of consumer attention and memory [54].
Moreover, the study of brain signals in the field of education have provided more insights on the degree of studied information and how the studying experience could be tailored on a single student. This could provide an improvement of students’ skills in real-life scenarios, instead on focusing only on information memorization. Moreover, the students could better develop competencies such as adaptive thinking, sense-making, design mindset, transdisciplinary approaches and computational skills [58].
A further development of BCI systems is also represented by their integration in the world of the internet of things. In fact, BCIs could be assistants able to analyze data such as mental fatigue, levels of stress, frustration and attention [59], while being embed in smart devices.
The study areas that make use of BCI systems are therefore diverse and increasingly numerous. Outside the medical sector, the EEG-based BCI technologies have been receiving more attention due to the development of non-medical wearable EEG devices which guarantee access to a wide range of users given their high portability and low cost.
Generally, BCI technologies needs to go under the scrutiny of experts to provide appropriate user-centred systems and allow a proper insight of their clinical usefulness and practicality [60]. These necessities can be detrimental in terms of efficient BCI system management costs, even though the initial technologies may be sufficiently low cost [60].
3.4. Wearable technologies
As introduced in the previous Section 3.3, considering the new demands from the general public and the need to move from laboratories and research centers to in-home and real-life environments, EEG-based BCI technologies are moving to low-cost, portable and easy-to-use by non-expert solutions.
Traditional laboratory EEG devices have usually helmet structures with holes in which the sensors (electrodes) are installed. The helmet is placed on the patient’s scalp and each electrode is connected to the recording tool by using cables. This may translate into a very large amount of time for preparing a test. E.g., the 256-channel device described by Fiedler et al. [61] requires long times to connect each electrode to the registration system and for patient preparation. This also makes it impossible for the patient to wear the device at any time of the day at home or anywhere else.
Starting from this awareness and to overcome the problem of discomfort of wired instruments, EEG wearable models were born. Wearable devices represent an evolution of the classic EEG tools. They are smaller devices that can be used potentially in any place and at any time. In fact, Casson et al. [62] defined the wearable devices as:
the evolution of ambulatory EEG units from the bulky, limited lifetime devices available today to small devices present only on the head that can record EEG for days, weeks, or months at a time.
By removing the cumbersome recording units, connecting wires and replacing them with microchip electrodes with embedded amplifiers, quantizers and wireless transmitters, it was possible to achieve the goal of creating devices that recorded and sent data wirelessly.
Although wired EEG are more stable and can transmit more data in less time [63], wearable devices are more comfortable and can be used wherever thanks to their portability. Moreover, it is possible to avoid the artifacts caused by the movement of cables and electrodes of wired EEG by using wearable EEG devices.
Notice that the electrodes of a wearable device need a adequate electrical connection with the scalp of the subject. The current available devices are equipped with three types of electrodes: dry, wet (gel-based or saline solution-based) and semi-dry. Dry electrodes of an EEG do not need to use a gel nor a saline solution to be connected with the scalp. This implies a greater simplicity of positioning, reducing also the setup time at the expense of a good signal conduction. Wet sensors can be divided into two categories: gel-based electrodes or saline solution-based electrodes. Gel-based electrodes make use of an electroconductive gel applied on each electrode. Gels generally reduce movement and skin surface artifacts by creating a more stable conductive connection between the electrode and the scalp compared to saline solutions [64]. However, the time for preparing the subject could increase and the subject may be uncomfortable due to the gel residues on the hairs and scalp. The cap and electrodes should also be carefully cleaned after usage.
On the other hand, some devices have electrodes imbued with a conductive saline solution in order to help make low-impedance electrical contact between the skin and the sensors [63].
It is also important to consider that wet electrodes based devices have some limitations [64]: the skin must be prepared to reduce the impedance of the scalp and the procedure can be annoying or sometimes painful. Moreover, if too much gel is used, it could affect the signal transmission by causing a short circuit between two adjacent electrodes. On the opposite, semi-dry electrodes require only a small amount of electrolyte fluid combining the advantages of both wet and dry electrodes while addressing their respective drawbacks. Their setup is as fast and convenient as their dry counterparts [65].
Even though the evolution of wearable technologies seems to be rapidly escalating, numerous issues remain to be addressed, especially if the final goal of these EEG wearable devices is to be used in any context. Firstly, the non-expert user may find it difficult to wear the electrodes correctly. As a result, the electrodes may be damaged or not correctly record the signal. A good device should guide the novice user to a fast and an effective positioning on the scalp, indicating whether the contact of the electrodes is stable or not. On the other hand, it is essential to make devices smaller and less bulky, while making them more resistant to artifacts [66]. Another sore point concerns the battery life, which is still too low for the instrument to be comfortably used outside research centers. Most wearable devices have been realized for general functions and applications that lack support for signal processing and feedback generation [67], resulting in low quality signal processing.
In light of these limitations, new designs are emerging for new generations of wearable EEG devices. Thanks to several studies showing that the EEG signal can be recorded on the forehead [68] and behind the ears [69,70], tattoo-like devices are emerging. They offer a better wearability and versatility [71]. In fact, they can be connected directly to the skin through adhesive materials without the use of gels or external supports. With the advantage of having features like ultra-thin thickness, ultra-softness and high adherence to the skin, the electrodes can comply with the skin deformation, providing a stable signal quality [72]. The downside of using such devices is that they may not be able to cover all areas of interest, such as hair-covered areas, making them unsuitable for some uses of EEG monitoring.
4. Overview of survey articles on EEG-based BCIs
In this section, an overview of survey articles present in the literature and concerning BCI systems is reported to provide a general assessment of the topics related but not superimposed to the target of the present paper.
In fact, most of the analyzed surveys address different application research areas and experimental paradigms. None of them focus exclusively on MI tasks, except the works by Palumbo et al. (2021) [74], who consider MI tasks in the sole field of wheelchair control, and the review study by Al-Saegh et al. (2021) [4], that concerns the use of deep neural network in the context of MI EEG-based BCIs.
In particular Palumbo et al. [74] provide a systematic survey of EEG-based BCIs for wheelchair control through motor imagination by including 16 papers published since 2010. The authors focused on (i) the MI paradigms and the type of commands provided to move the wheelchair, (ii) the employed EEG system (presenting sensors for other biomedical signal recording and the number of positioned electrodes) and the wheelchair components, and (iii) the EEG signal management procedures. The authors want to especially provide a clear assessment of the limitations of current biomedical devices when the end-user is affected by any kind of motor disability. Moreover, they point out the main challenges arising when having to face the development of an efficient and reliable BCI to control a wheelchair. Firstly, multiple commands are required to allow a correct control of the wheelchair, and thus a multi-objective problem characterizes the system. However, adding more commands may affect the performance of the BCI both in terms of accuracy and time-consumption. Secondly, the BCI performance is ultimately dependent from the user, who may fail to perform the MI tasks. Finally, the wheelchair control requires a constant concentration on the task and thus increases the users’ mental workload.
Considering instead the work of Al-Saegh et al. [4], the use of deep neural network in the context of EEG-based MI-BCIs is surveyed. The authors retrieved 40 papers published between January 1, 2015 and March 31, 2020. An analysis of the employed datasets has been performed and the authors find information of 15 datasets of which 7 are publicly available. They notice that they vary significantly in terms of electrodes, subjects, number of MI tasks and trials. However, most of the datasets seem to rely on experimental paradigms concerning the MI of right/left hand, feet and tongue. Moreover, the authors provide an assessment of the most used frequency ranges, extracted features, deep network architectures and input formulations, highlighting the variety of Deep Learning (DL) model designs.
In what follows, the review articles are reported according to their topics (experimental paradigms and applications, technological aspects, signal processing and analyses) and in chronological order of publication.
Considering experimental paradigms and applications, a comprehensive survey of different BCI experimental paradigms can be found in [75], published in 2019.
A general survey on EEG technologies and their application is instead presented by Soufineyestani et al. [63] (2020).
Moving to the technological aspects, a brief review on wearable technologies for smart environments is presented in [76] where the authors dedicate two sections on devices and applications for BCI systems. Considering these last topics, the technologies available at the time of the review (2016) are precisely listed and advancements of the EEG devices are easily detectable, especially considering the use of dry sensors and the presence of products for the general public. These information provide a good starting point to compare wearable technologies.
Instead, a detailed overview of the hardware components of wearable EEG-devices is provided by [66] in 2019.
The survey by TajDini et al. [77] (2020) focuses on wireless sensors and in particular on the assessment of consumer-grade EEG devices for non-medical research. The authors compare 18 products in terms of sensor type (dry, wet, semi-dry), number of channels, sampling rate, accessibility to raw data, operation time and price. The analysis of the literature is explored based on the different application domains: cognition (emotion recognition and classification, attention, mental workload, memory), BCI (ERP, SSVEP, MI and other), educational research and gaming.
The review by Portillo-Lara et al. [78] (2021) starts from an overview of the neurophysiological mechanisms that underlie the generation of EEG signals and then focuses on the state-of-the-art technologies and applications of EEG-based BCIs. Different electrode interfaces and EEG platforms are analyzed and compared in terms of electrode type and density, functionality, portability, and device performance. The advantages and disadvantages of different electrode designs are enumerated. The technical specification of 18 commercially available EEG platforms are also compared in terms of electrodes, channel count, sampling rate, weight, battery life, resolution, and price. Both medical and non medical uses are reviewed in the article.
Instead, the review by Jamil et al. [79], in 2021, aims to identify the main application areas that use EEG-based BCI devices and the most common types of EEG-based equipment, considering both wired and wireless devices. They present a systematic review using four search engines (PubMed, IEEE, Scopus, and ScienceDirect). The search strings used were (BCI OR Brain–computer interface OR BMI OR brain–machine interface) AND (EEG OR electroencephalogram) AND (rehab* OR assist* OR adapt*). The inclusion criteria were limited to publication years 2016-2020. After screening, 238 articles were selected and classified according to the following four research areas: education, engineering, entertainment, and medicine. They found that the medical area is the most frequently used (80%). Wired devices were used in the studies by 121/238 articles, while the remaining 117 reviewed manuscripts using wireless technologies.
Concerning signal processing and analyses, the feature extraction techniques widely used in the literature are reviewed in 2019 by Aggarwal et al. [43]. Moreover, a survey on EEG data collection and management (processing, feature exaction and classification) by considering 48 papers from high-impact journals is provided in 2021 by Reaves et al. [40]. The authors also include lists of devices and publicly available datasets.
A comprehensive review is presented by Gu et al. [80] in 2021. The authors provide a broad overview on BCI systems and their application areas. Moreover, they make a general presentation of invasive, partially and non-invasive brain imaging techniques and subsequently focus on EEG-based BCIs. Their review is organized to provide a consistent survey on (i) advances in sensors/sensing technologies, (ii) signal enhancement and real-time processing, (iii) machine learning (especially transfer learning and fuzzy models) and deep learning algorithms for BCI applications, and (iv) evolution of healthcare systems and applications in BCIs (e.g., concerning epilepsy, Parkinson’s/Alzheimer’s disease, and neurorehabilitation). Their analysis was performed on about 200 papers, considering publication years between 2015 and 2019.
5. EEG-based MI-BCIs through wearable systems
In this section we discuss and analyze the main issues and characteristics of the works considered for the present review. A detailed table that summarizes the collected information is made available as supplementary material (EEG-MI-BCI-Table).
5.1. BCI application and feedback
As a first assessment of the reviewed papers, an overview of the applications and feedback types of these EEG-based MI-BCI systems is provided in this section.
The main aim is to better understand the wide application of BCIs and the shift of experimental paradigms due to the need of consumer-grade applications in real-life environments.
By analyzing the reviewed papers (EEG-MI-BCI-Table), it is clear that the field of application and the feedback are extremely interconnected.
Moreover, motor imagery seems to be particularly used to provide control for external devices, especially for rehabilitation purposes. Therefore, the feedback usually consists of movements of robots, wheelchairs, prostheses, drones, and exoskeletons.
There are cases in which the feedback is visually provided on a monitor or exploiting virtual reality systems [81].
Moreover, feedback can help in modulating the MI ability of users. For instance, Jiang et al. [82] deal with the creation of a BCI system that uses discrete and continuous feedback in order to improve practicability and training efficiency. The results show that continuous feedback successfully improves imagery ability and decreases the control time.
Starting an in depth analyses on the application fields 30 on 84 researches have medical purposes [83,84,85,86,87,88,89,90,91,92,93,94,95,96,97,98,99,100,101,102,103,104,105,106,107,108,109,110,111,111].
Considering the stroke rehabilitation field, Mattia et al. [83] built a BCI system to enhance post stroke hand functional motor recovery by using an ecological feedback, i.e. the visual representation of the patient’s hands, as a feedback tool for the user. A BCI system for recovering people who suffer of post stroke hand disability has been also proposed by [112]. Firstly, an offline analysis has been performed. Afterwards, the online system has been initially tested on healthy subjects and then on 10 stroke patients affected by a hand disability. The subjects received a virtual feedback by controlling a virtual exoskeleton.
Another post-stroke rehabilitation BCI system is presented by Barria et al. [84], who propose a paradigm consisting of motor imagination with visual stimulation and motor imagination with visual-haptic inducement to control an ankle exoskeleton.
Moving to other motor disorders, [85] assume that people with motor disorders need the help of a caregiver to start a BCI. Therefore, they aim at identifying movement intention to initiate BCI systems. Instead, [86] examined neurofeedback manipulation to ensure a self-regulation of brain activity as a potential treatment for post-traumatic stress disorder considering both offline and online analyses. The feedback was shown through a videogame and the participants were asked to manipulate their brain activity to control the game.
Finally, Looned et al. [87] demonstrated the feasibility of a system that assists individuals with neurological disorders, for example to drink a glass of water independently. The application of this system is implemented through the movement of a robotic arm that assists the movement of the human arm.
Li et al. [88] created a hybrid BCI system to control a lower extremity exoskeleton. By combining EEG data with electromyographic data, they developed an exoskeleton able to help subjects while climbing stairs.
BCI applications are developed also in the entertainment, game and devices (vehicle, robots) control areas [113,114,115,116,117,118,119,120,121,122,123,124].
In particular, [113] focused on the BCI performance in a competitive multi-user condition. In fact, users had to control a humanoid robot in a race against an AI. The authors believed that the game conditions could help the users maintaining a high motivation and thus increase the effectiveness of the BCI system. However, they found out that there is no significant difference between competitive multi-user condition and single-user condition.
Device control is also proposed in [114]. A robotic quadcopter was intended to be controlled in three-dimensional physical space by a BCI user. After a training phase with a virtual drone, subjects modulated their sensorimotor rhythms and controlled a physical drone. A visual feedback was provided via a forward-facing camera on the hull of the drone.
Instead, Alanis et al. [115] created an immersive BCI system. In fact, the users could control the movement of a humanoid robot in a first person perspective, as if the movement of the robot was his/her own.
Another application is the one presented by Xu et al. [116], who proposed a motor imagery EEG-based continuous teleoperation robot control system with tactile feedback. The imagination of the user’s hand movements were translated into a continuous two-dimensional control signal and transmitted to the remote robotic arm (using the TCP/IP protocol) allowing to move it remotely through a wireless connection. The user received feedback through a vibrotactile stimulus, based on the tactile information of the robotic arm. The authors demonstrated that vibrotactile stimulation can improve operator telepresence and task performance.
For completeness, Figure 5 reports the reviewed paper distribution according to different fields of application and aims.
In respect to the previously discussed solutions, the reported papers mainly focus on rehabilitation systems (17.9%), assistive BCIs (17.9%), entertainment and device control solutions (14.3%).
The remaining works provide
5.2. Employed technologies
This section is devoted to the revision of the technologies employed by the reviewed papers, with a particular attention to EEG related devices, which are one of the main focus of this review and of which some information are reported in Table 4.
Notice that the first (Device) column of Table 4 provides the product names and presents an asterisk (*) when the devices are amplifiers (BrainMaster Discovery 24E g.USBamp, g.Nautilus Multi-Purpose, NuAmps, Synamps 2/RT) or data acquisition (Cyton Biosensing Board) tools. The link to the product is also reported as a citation. The producers are instead presented in the second column and a good number of devices from Emotiv can be detected. Three g.Nautilus entries are reported due to the absence of a clear indication of the devices used by the related works [85,86,101,121,126,141,142,147,149,151].
The Electrodes field presents firstly the number of sensors or recorded channels and if they are wet (W), dry (D) or semi-dry (S) electrodes. Notice that for the Starstim device the electrode type is marked as tES-EEG, having that its sensors allow both transcranial electrical stimulation and EEG monitoring. Observe that 9 on 21 devices can be used with both wet and dry electrodes and 6 products do not provide clear information on the sensor types.
An additional information on device pricing (updated to October 03, 2022) is reported in column 4 and the need for asking the price to the producers for the majority of the products is immediately detectable. Finally, the Papers field provides the list of reviewed works employing a specific device. Thirteen on 84 papers [82,119,124,130,134,139,150,154,155,156,157,158,159] do not appear in this column, having that the authors design and use custom EEG headsets. Finally, Khan et al. [131] and Vourvopoulos et al. [158] compare their custom devices with Emotiv EPOC+ and Enobio 8, respectively.
After having given a brief overview of the synthetic information regarding EEG related devices, it is possible to move to a deeper analysis of how these technologies have been effectively used by the authors according to the table present in the supplementary materials.
Fourteen works on 84 prefer reducing the number of electrodes provided by the device producers [84,88,100,102,106,122,138,158] and especially make a selection on the channel placed over the central cortical area, in particular considering only the C{3,4} [135,143], Cz [88,139,144] and C{1,2} [98] electrodes.
Moreover, some of the authors clearly specifies the sampling rate used for signal acquisition that goes from 125Hz [109], 128Hz [87,106,118,129,131,135], 250Hz [94,95,108,141,145], 256Hz [131], 500Hz [84,88,89,93,99,113,133,138,143,144,148,160,161] to 512Hz [120].
Finally, considering the other technologies presented in the supplementary table, the massive use of the Bluetooth technology for wireless communication between the wearable devices and acquisition/control tools is immediately observable. Moreover, some sensors have been used together with the EEG devices like the electromyogram [83,88,109,162,163], functional electrical stimulation devices [98], near infrared spectroscopy tools [100], and magnetic resonance imaging devices [146].
Notice that feedback was also provided by considering different tools like exoskeletons [84,88,96,99], wheelchairs and vehicles [94,95,102,104,106,118], rehabilitation and assistive robotic tools [87,93,101,103], eye tracking devices [160], movement tracking devices [160], virtual reality devices [89,97,115], robots [110,113,121,122], and simulators [123].

Table 4.
Synthetic information on the wireless devices employed by the reviewed papers. For the Nautilus entries, it was unclear which device the authors used, thus all the versions are reported. Last information update, October 03, 2022.
Table 4.
Synthetic information on the wireless devices employed by the reviewed papers. For the Nautilus entries, it was unclear which device the authors used, thus all the versions are reported. Last information update, October 03, 2022.
| Device | Producer | Electrodes | Price | Papers |
|---|---|---|---|---|
| B-Alert X-Series [164] | Advanced Brain Monitoring | up to 20 / W (gel) | ask to producer | [98] |
| BrainMaster Discovery 24E* [165] | bio-medical | 24 / W, D (compatible) | 5800.00$ | [110] |
| Cyton Biosensing Board* [166] | OpenBCI | 8 / W, D (compatible) | 999.00$ | [94,109,158] |
| eego rt [167] | ANT Neuro | 8-64 / W, D | ask to producer | [168] |
| Enobio 20 [169] | Neuroelectrics | 20 / W, D | ask to producer | [84,138] |
| Enobio 8 [170] | Neuroelectrics | 8 / W, D | ask to producer | [89,93,144,158,160,161] |
| EPOC+ [171] | Emotiv | 14 / W (saline) | discontinued | [91,106,111,117,122,123,125,128,129,131,132,135,152,163,172] |
| EPOC Flex [173] | Emotiv | up to 32 / W (gel, saline) | 1699.00-2099.00$ | [118,162] |
| EPOC X [174] | Emotiv | 14 / W (saline) | 849.00$ | [103] |
| g.USBamp* with(out) g.MOBIlab [175] | g.tec medical engineering | 16 / W, D | starting from 11900.00€ | [83,100,116,121] |
| Helmate [176] | abmedica | NA / NA | ask to producer | [107,153] |
| Insight [177] | Emotiv | 5 / S | 499.00$ | [102] |
| MindWave Mobile 2 [178] | Neurosky | 1 / NA | 109.99$ | [104,179] |
| Muse headband 2 [180] | InteraXon | 4 / NA | 269.99€ | [105,108,127,137,140] |
| g.Nautilus Multi-Purpose* [181] | g.tec medical engineering | 8-64 / W, D (compatible) | changing according to configuration, starting from 4990.00€ | [85,86,101,121,126,141,142,147,149,151] |
| g.Nautilus PRO [182] | g.tec medical engineering | 8-32 / W, D | changing according to configuration, starting from 5500.00€ | [85,86,101,121,126,141,142,147,149,151] |
| g.Nautilus RESEARCH [183] | g.tec medical engineering | 8-64 / W, D | changing according to configuration, starting from 4990.00€ | [85,86,101,121,126,141,142,147,149,151] |
| NuAmps* [184] | NeuroScan | 32 / NA | ask to producer | [88] |
| Quick-20 Dry EEG Headset [185] | Cognionics | 19 / D | ask to producer | [96,133] |
| Starstim [186] | neuroelectrics | 8-32 / tES-EEG | ask to producer | [99,136] |
| Synamps 2/RT* [187] | Neuroscan | 64 / NA | ask to producer | [114] |
5.3. Signal processing and analysis
This section is devoted to the second step of the BCI life-cycle and in particular on signal preprocessing, feature engineering and channel selection, and data classification and analyses.
5.3.1. EEG data preprocessing
EEG signals contain artifacts from internal sources due to physiological activities, e.g. ocular and muscle movements, cardiac activity, respiration and perspiration, and external sources related to environmental and experimental noise, e.g. power line and mobile phone interference, electrode movements, electromagnetic components [7]. Each of this type of noise has its own frequency band and can affect differently the brain rhythms.
Due to the non-stationarity and non-linearity of EEG signals, it is difficult to remove these artifacts without loss of neural information [188].
In particular, EOG artifacts (related to eye movements) and EMG artifacts (related to muscle movements) are considered among the most common sources of physiological artifacts in BCI systems [189].
In the case of wearable devices, the possibility of introducing other artifacts (e.g. data transmission fault, electrical interference) in respect to traditional wired devices increases [190]. Therefore, the preprocessing module of a typical BCI life-cycle becomes fundamental to provide better data as inputs to the subsequent modules.
From the analysis of the literature summarized in the EEG-MI-BCI-Table we observe that 60 out of 84 articles indicate some details on the preprocessing step of the BCI life cycle. From this subset, we here list the main techniques adopted, enumerating only those papers that explicitly reported them:
- 9 works assumed that source signals are statistically independent from each other and instantaneously mixed, and apply Independent Component Analysis (ICA) to remove noise, mainly due to eye movements and eye blinks [89,91,99,137,143,146,148,154,160]. EEGLAB toolbox [191] is frequently employed by the authors to implement ICA.
- 11 works applied temporal filtering approaches like Butterworth of different orders and cutoffs: 3rd order filter in 0.5-30Hz [144] or in 4-33Hz [119], 4th order in 16-24Hz [84], 5th order in 8-30Hz [92,110,128,138,139] or in 1-40Hz [109], biquad tweaked Butterworth in 8-13Hz [134], 6th order in 8-30Hz [149].
5.3.2. Feature engineering
The next step after the signal preprocessing is the feature engineering stage, where the relevant information about the EEG signals are extracted and analyzed.
As detailed in Section 3.2, during motor movement or imagination, and rhythms are interested by a desynchronization (ERD). Instead, the deactivation of the motor cortex goes against a synchronization (ERS) of the rhythm.
Therefore, the power changes due to ERD/ERS encodes relevant information on MI. In general, ERD (ERS) is observed in the contralateral (ipsilateral) sensorimotor area. Taking into account these phenomena, Common Spatial Pattern (CSP) and band power features (that represent the power of EEG signals for a given frequency band averaged over a time window) are natural choices with respect to feature extraction methods and are applied by most of the works within the field of EEG analysis. The lateralization index between hemispheres is also used to describe the asymmetry of neural activation intensity [89].
Following the analysis of the EEG-MI-BCI-Table provided as supplementary material and taking into account the articles that explicitly indicate the feature extraction steps performed, we have that:
Notice that most of the authors combine features from multiple domains in order to get a final more robust feature vector able to improve the classification accuracy.
Nearly all the reviewed articles work with different combination of hand-crafted features, but recently deep features extracted by Convolutional Neural Networks (CNNs) have been also considered [106,111,122,127,139].
With respect to feature selection, different methods are applied like ICA [142], joint mutual information [86,129], generalized sparse discriminant analysis (that is employed to perform feature reduction and classification contemporaneously) [109,168] and sequential backward floating selection techniques [131].
To reduce the data dimensionality the traditional channel set C{3,4,z}, located over the central cortical area, are often considered [88,143,144,154,156,163]. However, in several cases, the choice of the electrodes mainly depends on the used device [82,105,108,137,140]. Electrodes positioned over the fronto-central and central-parietal areas are also frequently taken into account. Electrode subsets are also added to the C{3,4,z} group: C{1,2} [98,138], FC{3,4} [150], Fpz and Pz [158]. Daeglau et al. [113] selected the electrode set constituted by Cz and CP{1,z,2}.
Moreover, different groups of 8 electrodes are selected by some of the reported studies: FC{1,2} + C{3,z,4} + CP{1,2} + Pz [94], F{3,4} + C{3,z,4} + T{7,8} + Pz [93], C{1,3,z} + CP{1,5} + FC{1,5} + P3 [160], FC{5,6} + C{1,2,3,4} + CP{5,6} [89], and Fp{1,2} + Fz + C{z,3,4} + O{1,2} [153]. Instead, groups of 9 electrodes have been considered by [99,136] (C{z,1,2,3,4} + CP{1,2} + FC{1,2}), while 10 electrodes have been selected by [97] (C{1,2,3,4,5,6} + FC{3,4} + CP{3,4}).
5.3.3. Classification and data analysis
As a final processing step, classification and data analysis are performed to provide a specific assessment of the EEG data or to allow the correct feedback execution.
Concerning the reviewed papers, notice that the main strategies employed can be divided in (i) traditional Machine Learning (ML) models, (ii) DL architectures, (iii) other supervised learning techniques considering ensemble and transfer learning approaches with the possible additional application of evolutionary algorithms, (iv) statistical analysis, quality assessment and functional connectivity.
The strategies are distributed as depicted in Figure 6. Notice that details on the proposed ML and DL models have been reported, while there are no details for the other 2 categories, due to the great variety of approaches.
Besides some papers that employ different strategies at the same time [85,97,111,115,117,118,130] or multiple ML techniques [85,107,129,131,140,142,148,153,179], the authors usually prefer to concentrate on a specific technique.
The traditional ML models seem to be the most used and among them the Linear Discriminant Analysis (LDA) classifier employed in its basic version [85,86,89,97,100,107,113,115,130,146,147,148,149,154], in combination with Common Spatial Pattern (CSP) [92], or considering multiple LDA models combined through fuzzy integration, considering optimal feature selection and classification through generalized sparse LDA [168], and presenting confidence levels assigned with particle swarm optimization [124] appears to be the most used. Likewise, the Support Vector Machine (SVM) classifier is widely employed [82,85,95,107,117,118,119,125,131,136,142,148,150,151,153,179].
The K-Nearest Neighbor (KNN) model is used by a good number of works [85,98,107,118,129,131,142,179], while the other techniques, i.e. Naive Bayes (NB) [85,107] Parzen Window [131], Multi-Layer Perceptron (MLP) [105,141,179], decision tree [85,129,179], Random Forest (RF) [153,179], Neural Network (NN) [107,157], Logistic Regression (LR) [96,140], and Quadratic Discriminant Analysis (QDA) [140], have been employed by a restricted number of works and together with other techniques.
Considering the DL approaches, the most used architectures have been based on the use of Convolutional Neural Networks (CNNs) [108,117,119,122,127,138,143,159] sometimes combined with Long Short Term Memory (LSTM) layers [108,122,127]. [106] provided analyses by employing 1DCNN, 2DCCN and one-dimensional multi-scale convolutional neural network (1DMSCNN). Instead, [139] specified the use of pre-trained CNNs, i.e. AlexNet, ResNet50, and InceptionV3. Finally, 2 works used a back propagation NN [88] and an autoregressive model [116].
The Other AI (Artificial Intelligence) techniques depicted in Figure 6 refers to miscellaneous approaches that could use ensemble techniques [117], transfer learning [139] models or other supervised learning approaches like, adaptive Riemannian classifier [126], eXtreme Gradient Boosting (XGBoost) [111], echo state network with genetic algorithm for parameter optimization and Gaussian readouts to create direction preferences [132], fuzzy integral with particle swarm optimization [130], multi-objective grey wolf optimization twin support vector machine [128], and Markov switching model [133].
Finally, a great number of statistical analysis, quality assessment and functional connectivity studies or other MI detection techniques falls under the Other analysis label.
The applied strategies may be summarized as follows:
- Questionnaire analyses have been also performed for quality assessment, by considering the opinions given by the subjects concerning a specific device [93] or employing Quebec User Evaluation of Satisfaction with Assistive Technology test to evaluate patients’ satisfaction [84], and for subject MI ability assessment [109].
Other analyses performed by the reviewed works are the BCI-use success rate assessment based on the beta power rebound threshold [84], learning vector quantization to predict character control [120], a two-command certainty evaluation algorithm proposed by [118], the use of SPSS tool for statistic analysis [85], and the application of a transfer rate metric to determine an asynchronous real-world BCI [114].
Table 5 summarizes the information related to the classification and other analyses presented by works reporting comparisons with benchmark datasets (Section 5.4) and/or having their proprietary datasets available upon request or present in public repositories.
For each table entry are reported the (i) reference work, (ii) the benchmark datasets (which are detailed in Section 5.4) and their own dataset with a minimal description of the considered experimental paradigm, (iii) the classification tasks and models (if any) and other analyses (if any), (iv) the performance of the best reported model comprising the evaluation measures, the validation strategies and the results on each of the employed datasets, and (v) if the system was tested online and/or offline.
Notice that the analyses are performed by considering the subjects one at a time, if not otherwise stated. Moreover, an asterisk has been applied to all the datasets that will be detailed in the following Section 5.4, at their first appearance.
The fields of application of the reported works are very diverse, however the classification tasks usually involve the binary classification related to the MI of hands grasping, opening/closing or moving.
Moreover, most of the works report accuracy (usually higher than 70% for both binary and multi-class tasks) as the only performance measure to evaluate the proposed classification models and the validation strategy is not always specified.
Finally, most of the entries present offline analyses and just a few try to work in an online modality.
5.4. Dataset and experimental paradigms
Of the 84 cited papers, 7 report that their proprietary datasets are available upon request [89,107,115,119,129,142,172], and only [109] provides the MI-OpenBCI dataset has a publicly available resource.
Instead, the publicly available third parties’ BCI Competition III dataset IIIa [129], BCI Competition III dataset IVa [168], BCI Competition IV dataset 2a [126,129,139], 2b [106], EEG Motor Movement/Imagery Dataset [111] and the EEG BCI dataset [122] have been employed by the reviewed papers as benchmarks before proprietary data testing or to directly test the proposed approaches.
Table 6 presents a summary of the publicly available datasets, which will be described in details in the following subsections.
Considering the other papers, notice that the experimental paradigms usually concern the motor imagination of left/right hand/fist [82,86,89,90,91,92,95,97,106,108,111,115,116,119,124,125,126,127,130,131,133,134,137,138,139,142,143,144,145,146,147,149,150,154,157,159,161,179], both hands [95,115,116,126,138,161], dominant or single hand movements [83,98,109,156,168], finger tapping [163], shoulder flexion, extension and abduction [128,129], motion of upper/lower limbs [87,93,99,100,141,162], foot/feet movement [84,96,110,115,119,125,126,138,144,161], pedalling [94,136,148], tongue movement [125], game character/robot/machinery movement control [101,102,103,104,105,113,114,115,117,118,120,121,122,123,152,172], generic motor intention [85,151].
Peculiar experimental conditions are presented by [140] and [153]. Tiwari et al. [140] propose the imagination of 8 cognitive tasks, i.e. forward, backward, left, right, hungry, food, water, and sleep, with the perspective of developing an efficient assistive tool for disabled people. Angrisani et al. [153] design a complex experimental paradigm of performed and imagined soft ball squeeze, dorsiflexion of the ankle, flex-extension of the forearm, finger mobilization by clenching a clothespin, and flex-extension of the leg, to validate their BCI instrumentation.
Besides the experimental paradigms considered by the reviewed works, it is interesting to have an overview of the subjects involved in the experiments.
Excluding [111,130], which employ third parties’ datasets, framework proposals [83,102] and simulated environments [101], in the remaining 79, analysis on the involved subjects can be synthetically listed as follows:
- 7/79 papers do not provide any information regarding the involved subjects.
- 36/79 papers specify the biological gender of the subjects and report most of the time the number of subjects divided per male and female.
- 50/79 papers recruited healthy subjects, while only 5 considered patients affected by specific patologies.
- 21/79 papers present information regarding the previous experience of the subjects with EEG, BCI, or MI based experiments.
- Almost the 50% of the works reporting information on the subjects perform their experiment on a maximum of 5 participants, the 27% recruits a maximum of 10 subjects, and a very few number of works consider more than 20 participants. A detailed infographic is depicted in Figure 7.
Finally, notice that of the 84 papers, 39 presents an ethical statement regarding the approval of the proposed experiment and 33 confirm that a written or oral informed consent was given by the subjects.
5.4.1. BCI Competition III dataset IIIa
The BCI Competition III dataset IIIa [192] collects the data recorded from 3 subjects while performing a cue-based experiment of MI tasks, i.e. left/right hand, foot or tongue movement randomly presented in 6 runs of 40 trials each.
The EEG signals have been acquired on 60 electrodes1 through a wired 64 channel Neuroscan device (250Hz sampling rate). The reference and ground electrodes were placed on the left and right mastoids, respectively.
The output signal has been bandpass filtered (1-50Hz) and the notch filter was enabled.
5.4.2. BCI Competition III dataset IVa
The BCI Competition III dataset IVa [192] presents the recording of 5 subjects, who were asked to perform left/right hand and right foot MI, according to two types of visual stimulations. Each subject had to respond to 280 cues.
BrainAmp amplifiers and 128 channel Ag/AgCl electrode cap from ECI were employed for the EEG signal collection. Notice that of the 128 channels, 118 were measured at positions compliant to the extended international 10-20 system2.
The acquired signals were bandpass (0.05-200Hz) filtered and digitized at 1000Hz with 16 bit (0.1 uV) accuracy. A data version presenting downsampled signals at 100Hz was also provided.
5.4.3. BCI Competition IV dataset 2a
The widely known BCI Competition IV dataset 2a [193] contains continuous multi-class motor imagery data acquired from 9 subjects. The participants were asked to perform a cue-based MI-BCI considering the imagination of left/right hand, both feet and tongue movements. The subjects had to participate to 2 experimental sessions (6 runs of 48 trials each) in different days.
Notice that the signals were recorded from 22 Ag/AgCl wired electrodes (please, consult the original publication for the montage details). Left and right mastoids presented the ground and reference electrodes, while 2 EOG channels were positioned to allow artifact removal. The signal presented a sampling rate of 250Hz and was bandpass (0.5-100Hz) and notch (50Hz) filtered. Moreover, experts performed a manual screening of the signals and marked the trials containing artifacts.
5.4.4. BCI Competition IV dataset 2b
The Session-to-Session Transfer of a Motor Imagery BCI under Presence of Eye Artifacts dataset, widely known as the BCI Competition IV dataset 2b [193], was intended to provide the classification of EEG signal in presence of ocular artifacts. Therefore, it collects EEG (on C{3,4,z} electrodes) and electrooculogram signals previously acquired by [196]. 9 right-handed healthy subjects had to perform an experiment during which they were guided to produce specific ocular artifacts and that also presented a cue-based MI-BCI paradigm consisting in the motor imagination of left and right hand movements. 2 sessions (each of 6 runs with 10 trials per run) without feedback were recorded separately for each subject. Afterwards, 3 sessions with online feedback were performed, having that each session was constituted by 4 runs of 40 trials each. The feedback was in the form of a smiley changing expression and color depending on the good outcome of the MI task.
5.4.5. EEG Motor Movement/Imagery Dataset
The EEG Motor Movement/Imagery Dataset available on the PhysioNet repository3 [42,194] presents data acquired using a BCI2000 system and considering 64 EEG channels positioned according to the 10-10 International System (excluding electrodes Nz, F9, F10, FT9, FT10, A1, A2, TP9, TP10, P9, and P10). The recording was performed with a sampling rate of 160Hz.
Each of the 109 subjects undertook a cue-based experiment of 14 runs consisting of 2 baseline recordings and 3 recordings per experimental task, i.e. MI and executed opening/closing of left/right fist, MI and executed opening/closing of both fists/feet.
5.4.6. MI-OpenBCI
The MI-OpenBCI dataset [109] presents the recordings acquired through a consumer-grade MI-BCI system based on OpenBCI Cyton and Daisy Module. The EEG signal was recorded by using the Electrocap System II. Moreover, an electromyographic signal was acquired through the OpenBCI Ganglion board connected to the Myoware sensors. OpenViBE and OpenBCI GUI were used for EEG and electromyographic data recording, respectively.
The experiment was approved by the Comité Asesor de Ética y Seguridad en el Trabajo Experimental and performed by 12 (4 female) healthy right-handed subjects (mean age ± SD = 25.9 ± 3.7 years), who did not have any previous experiences with BCIs. The subjects gave their informed consent. Regarding the sole EEG wireless data recording (125Hz sampling rate), the F{z,3,4,7,8}, C{z,3,4}, T{3,4,5,6}, P{z,3,4} electrodes were employed. The reference and ground electrodes were placed at the left/right ear lobes.
The experimental protocol consisted of a cue based motor imagination of the dominant hand grasping and a resting condition. The tasks were presented randomly 20 times (4s) each for 4 runs. A 20s baseline was acquired before protocol start.
5.4.7. EEG BCI dataset
With the aim of providing a large and uniform dataset to design and evaluate processing strategies, [195] provides the EEG BCI dataset. The data were acquired after the approval of the Ethics Committees of Toros University and Mersin University in the city of Mersin (Turkey) and after having received the informed consent form signed by the subjects.
The data were acquired through a standard medical EEG station (EEG-1200 JE-921A EEG system, Nihon Kohden, Japan) considering 19 electrodes of the Electrocap System II and with varying sampling rate and in-built filtering application.
The 13 healthy participants (5 females and 8 males, aged 20-35) were asked to perform different MI paradigms consisting of left/right hand, left/right leg, tongue and finger movements.
6. Discussion
In this systematic review, 84 papers published in the last ten years have been deeply analyzed with the aim of answering the following main research question:
- Are wearable technologies mature for EEG-based MI-BCI applications in uncontrolled environments?
However, several aspects should be considered to properly address this point and thus 4 sub-questions have been defined, as introduced in Section 1.
Important conclusions can be drawn to answer the first research sub-question
- RQ1: Is there a significant amount of EEG-based MI-BCI studies using wearable technologies in the literature that implies a promising future development of this research field, especially in uncontrolled environments and outside the medical and clinical settings?
By analyzing the results obtained through the extensive search initially performed considering different EEG, MI, BCI related keyword combinations (Section 2.3) and detailed in Table 2, and the final paper pool identified through the PRISMA flow (Figure 1).
In fact, according to the results reported in Table 2 the MI paradigm is particularly used in the EEG domain. About 26% of the works retrieved by considering only the EEG-based BCI keywords present MI paradigms, while only the 0.71% present the use of wearable technologies for MI experiments.
Considering the timeline of the final filtered publications (Figure 2), most of the reviewed works have been published between 2019 and 2020, denoting the relatively new interest in wearable devices and a recent increase in the availability of these technologies to the EEG community.
Notice that around 20 different devices (Section 5.2) have been adopted in the applications reported by the 84 papers here analyzed, with different spatial resolutions (from 1 to 64 electrodes) and characteristics. This huge number of tools and variety of technical properties denote the increasing interest in this technology but make it difficult to qualitatively compare them.
Research directions have been clearly paved to provide new EEG-based MI-BCI wearable solutions with the aim of being employed for applications in heterogeneous and real-life environments.
One-third of the applications found in the reviewed literature are related to rehabilitation and assistive purposes, where the feedback of the systems plays a significant role in controlling external devices. Nearly 25% of the reviewed papers focus on methodological testing, presenting either new frameworks or particular signal processing and analysis techniques. Several works (15%) describe BCI applications developed in the entertainment field, while nearly 17% of contributions address the evaluation of new technical solutions and paradigm proposals.
Therefore, uncontrolled environments have been scrutinized by researchers to propose new EEG-based MI-BCIs wearable solutions.
Another interesting datum on the research production of the last ten years regards the development and study of BCI life-cycle pipelines, which concerns the second sub-question
- RQ2: Are there common pipelines of processing that can be adopted from signal acquisition to feedback generation?
Data acquisition, signal preprocessing, feature engineering and channel selection, data classification and analyses, as well as feedback modalities of the 84 papers here considered, have been extensively analyzed in this review and synthesized in Section 5, and in particular in Table 5 and Figure 6. To summarize this analysis and answer RQ2, we observe that a first crucial point especially using wireless technologies and wearable devices is related to noise removal. To address this point, considering both internal and external noise sources, preprocessing algorithms can benefit of the knowledge on the frequencies of both the artifacts to be removed and the rhythms that should be preserved. However noise and signal frequencies often interfere.
Three main approaches can be identified, namely the use of blind source separation techniques, filters in the frequency domain and spatial filters. The first approach usually presents the application of ICA, which separate a mixed signal into different components, assuming the presence of different signal sources. The second type of preprocessing relies on filters in the frequency domain, especially Butterworth filters, to select the brain rhythms of interest and at the same time remove noise. The last type of approach, applies spatial filtering, like CAR filtering, taking into account the spatial correlation of the brain waves.
Even if a unique strategy is not adopted by all the applications, the noise removal procedures are quite similar among the considered publications.
For what concerns the feature engineering steps (which usually comes after the preprocessing one), the variability among different papers is relatively low. In general the ERD/ERS phenomenon is widely studied considering and rhythms, exploiting time, frequency and time-frequency handcrafted features. Only in recent years deep learning methods have begun to be used to automatically extract features from the raw signals.
Moreover, working with wearable devices and potentially in uncontrolled environments with low computational power, the reduction of data dimensionality is particularly important, especially considering the need for a low number of input data to be considered in a classification task. To this end, besides traditional feature reduction and feature selection strategies, a good number of works focuses only on specific channels that are usually chosen among the central cortical area, which is coherent with the neuroscientific literature on MI.
The last processing step represented by data analysis and classification, appears to be more heterogeneous in respect to the other ones, as depicted in Figure 6. In particular, regarding models to perform different classification tasks, most of the works (about 54%) rely on traditional machine learning techniques, especially LDA and SVM, about 10% adopt ensemble techniques, transfer learning models or other supervised learning approaches while only 15% of them adopt deep learning strategies. It is also worth noting that 21% of the works do not face classification problems, but present statistical analysis, quality assessment and functional connectivity studies.
From these considerations, we can then conclude that there is a low variability in the initial steps of the whole BCI life cycle, while for what concerns data analysis and classification a higher variability can be identified. In particular the adoption of deep learning models is at its early stage, and it is not outstanding with respect to traditional machine learning strategies.
A clear comparison and assessment of the efficacy of different classification models would benefit from the application of these strategies on data acquired using a similar experimental paradigm or on benchmark datasets.
This observation is strictly related to RQ3 and RQ4 sub-question answering. Starting from the third sub-question
- RQ3: Are there consolidated experimental paradigms for wearable EEG-based MI-BCI applications?
Notice that the experimental paradigm adopted by most of the considered works (39 out of 84) concerns MI of left/right hand/fist movement. However a high number of different types of other MI paradigms are considered: single hand/both hands, foot/feet or tongue movement, shoulder flexion, extension and abduction, motion of upper/lower limbs, pedalling, game character/robot/machinery movement control or generic motor intention and even the imagination of cognitive tasks. Moreover, single task duration, task order, administration modality, and experimental settings are also very heterogeneous.
From this variety of MI paradigms, several datasets have been collected or employed by the authors of the reviewed papers allowing to answer the last research sub-question
- RQ4: Are there datasets available for the research community to properly compare classification models and data analysis?
Considering data acquisition, 79 out of 84 works collect their own dataset, involving in most of the cases (76%) less then 10 subjects. In particular, about 49% of these 79 works, consider less then 5 participants. Notice that only 7 proprietary datasets are available upon request.
Moreover, among all the publicly available datasets reported in Table 6 and that can be considered as benchmarks, only one is acquired using wearable devices [109].
Among the 84 papers considered, only 9 adopted these benchmark datasets to evaluate the proposed models, of which 8 employed the third parties datasets acquired using wired systems.
Notice also that even if the same benchmark dataset is adopted, the classification tasks may vary from different types of binary classification: one-vs-one (for instance, left versus right hand) or one-vs-rest (for example right hand imagined movement versus resting state), and multiclass classification, with a range between 3 and 5 classes. Classification models and their performance as well as other types of analysis are reported in Table 5 only for those works (13 out of 84) that present results either on benchmark datasets or on available proprietary ones, making the proposed analysis reproducible. As a final important note, among these 13 publications, only five declare to perform online analysis.
Considering the answers to the provided sub-questions, the main research question concerning the maturity of EEG-based MI-BCI applications in uncontrolled environments can be addressed.
Having a closer look at the applications reported by the reviewed papers, it seems that most of them pertain to the medical and rehabilitation fields and are mostly employed in controlled environments. However, the EEG-based MI-BCI systems using wearable technologies in real-life scenarios seem to provide reliable assistance to their users and to be well received in case of assistive employment, as well as promising in case of entertainment, gaming, and other applications. The scenario of wearable devices available in the market is wide, also offering a huge variability in terms of electrodes, features and costs. Even if several different computational models have been presented in the analyzed literature, with promising results, the lack of reference experimental paradigms and of publicly and validated benchmark datasets acquired using wearable devices, make the analysis of the model performance and the feasibility of real time applications not completely accessible. It is unclear whether proposed strategies, tested on wired benchmark datasets, often offline, can be effectively translated into online real-life wearable contexts.
Many concerns remain regarding the ethical aspects that permeate the use of these systems in environments managed by experts and in consumer grade platforms. Concerning this point, note that among the 84 considered works, only 39 provide an ethical statement on the approval of the performed experiments.
Regarding future research directions, two main fields can be identified. On one side, edge computing is fast evolving to improve data processing speed in real-time applications. For example, [197] overview adaptive edge computing in wearable biomedical devices (in general, not only EEG ones), highlighting the pathway from wearable sensors to their application through intelligent learning. The authors state
The ultimate goal toward smart wearable sensing with edge computing capabilities relies on a bespoke platform embedding sensors, front-end circuit interface, neuromorphic processor and memristive devices.
Also, [198] investigate the possibility of addressing the drawbacks of wearable devices with edge computing.
The other frontier research field regards the application of quantum computing to BCI. Although efforts are only at the initial stage, some hybrid applications of quantum computing and BCI have been found, as reviewed by [199]. Recently, the authors in [200,201] discuss Quantum Brain Networks, a new interdisciplinary field integrating knowledge and methods from neurotechnology, artificial intelligence, and quantum computing. In [201], brain signals are detected utilizing electrodes placed on the scalp of a person who learns how to produce the required mental activity to issue instructions to rotate and measure a qubit, proposing an approach to interface the brain with quantum computers.
Author Contributions
Conceptualization, A.S., M.C., S.C, and F.G.; methodology, A.S., M.C., S.C., and F.G.; validation, A.S, M.C., S.C. and F.G.; formal analysis, A.S, M.C., S.C. and F.G.; investigation, A.S, M.C., S.C. and F.G.; resources, A.S, M.C., S.C. and F.G.; data curation, A.S, M.C., S.C. and F.G.; writing—original draft preparation, A.S, M.C., S.C. and F.G.; writing—review and editing, A.S, M.C., S.C. and F.G.; visualization, A.S, M.C., S.C. and F.G.; supervision, A.S, M.C., S.C. and F.G. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
Abbreviations
The following abbreviations are used in this manuscript:
| 1DMSCNN | One-dimensional multi-scale convolutional neural network |
| AI | Artificial Intelligence |
| ANN | Artificial Neural Network |
| AUC | Area Under the Curve |
| BCI | Brain Computer Interface |
| CAR | Common Average Reference |
| CNN | Convolutional Neural Network |
| CSP | Common Spatial Pattern |
| DBN | Deep Belief Network |
| DL | Deep Learning |
| ECG | Electrocardiogram |
| ECoG | Electrocorticography |
| EEG | Electroencephalography |
| EMG | Electromyography |
| EOG | Electrooculography |
| ERD | Event-Related Desynchronization |
| ERP | Event Related Potentials |
| ErrP | Error Related Potential |
| ERS | Event-Related Synchronization |
| FFT | Fast Fourier Transform |
| FGMDRM | Framework with filter Geodesic Minimum & Distance to Riemannian Mean |
| FMRI | Functional Magnetic Resonance Imaging |
| ICA | Independent Component Analysis |
| KNN | K-Nearest Neighbor |
| LDA | Linear Discriminant Analysis |
| LPA | Left Pre-Auricolar point |
| LR | Logistic Regression |
| LSTM | Long-Short Term Memory |
| MI | Motor Imagery |
| ML | Machine Learning |
| MLP | Multi-Layer Perceptron |
| MSCNN | Multi-Scale Convolutional Neural Network |
| NB | Naive Bayes |
| NN | Neural Network |
| PSD | Power Spectral Density |
| PTFBCSP | Penalized Time-Frequency Band Common Spatial Patt |
| n QDA | Quadratic Discriminant Analysis |
| RF | Random forest |
| RNN | Recurrent Neural Network |
| RPA | Right Pre-Auricolar point |
| RQ | Research Question |
| SJGDA | Semisupervised Joint Mutual Information with Genera |
| Discriminate Analysis SNR | Signal to Noise Ratio |
| SSDT | Subject Specific Decision Tree |
| SSVEP | Steady-State Visual Evoked Potential |
| SVM | Support Vector Machine |
| TES | Transcranial Electrical Stimulation |
| VR | Virtual Reality |
| XGBoost | Extreme Gradient Boosting |
References
- Millett, D. Hans Berger: From psychic energy to the EEG. Perspectives in biology and medicine 2001, 44, 522–542. [Google Scholar] [CrossRef] [PubMed]
- Shih, J.J.; Krusienski, D.J.; Wolpaw, J.R. Brain-computer interfaces in medicine. In Proceedings of the Mayo clinic proceedings. Elsevier, 2012, Vol. 87, pp. 268–279. [CrossRef]
- Kögel, J.; Schmid, J.R.; Jox, R.J.; Friedrich, O. Using brain-computer interfaces: a scoping review of studies employing social research methods. BMC medical ethics 2019, 20, 1–17. [Google Scholar] [CrossRef] [PubMed]
- Al-Saegh, A.; Dawwd, S.A.; Abdul-Jabbar, J.M. Deep learning for motor imagery EEG-based classification: A review. Biomedical Signal Processing and Control 2021, 63, 102172. [Google Scholar] [CrossRef]
- Page, M.J.; McKenzie, J.E.; Bossuyt, P.M.; Boutron, I.; Hoffmann, T.C.; Mulrow, C.D.; Shamseer, L.; Tetzlaff, J.M.; Akl, E.A.; Brennan, S.E.; et al. The PRISMA 2020 statement: an updated guideline for reporting systematic reviews. Systematic reviews 2021, 10, 1–11. [Google Scholar] [CrossRef] [PubMed]
- Srinivasan, R.; Nunez, P. Electroencephalography. In Encyclopedia of Human Behavior (Second Edition), Second Edition ed.; Ramachandran, V., Ed.; Academic Press: San Diego, 2012; pp. 15–23. [Google Scholar] [CrossRef]
- Zhang, J.; Yin, Z.; Chen, P.; Nichele, S. Emotion recognition using multi-modal data and machine learning techniques: A tutorial and review. Information Fusion 2020, 59, 103–126. [Google Scholar] [CrossRef]
- Rojas, G.M.; Alvarez, C.; Montoya, C.E.; de la Iglesia-Vayá, M.; Cisternas, J.E.; Gálvez, M. Study of resting-state functional connectivity networks using EEG electrodes position as seed. Frontiers in neuroscience 2018, 12, 235. [Google Scholar] [CrossRef] [PubMed]
- Craik, A.; He, Y.; Contreras-Vidal, J.L. Deep learning for electroencephalogram (EEG) classification tasks: a review. Journal of neural engineering 2019, 16, 031001. [Google Scholar] [CrossRef] [PubMed]
- Hosseini, M.P.; Hosseini, A.; Ahi, K. A Review on Machine Learning for EEG Signal Processing in Bioengineering. IEEE reviews in biomedical engineering 2020. [Google Scholar] [CrossRef]
- LaRocco, J.; Le, M.D.; Paeng, D.G. A systemic review of available low-cost EEG headsets used for drowsiness detection. Frontiers in neuroinformatics 2020, 14. [Google Scholar] [CrossRef] [PubMed]
- Wan, X.; Zhang, K.; Ramkumar, S.; Deny, J.; Emayavaramban, G.; Ramkumar, M.S.; Hussein, A.F. A review on electroencephalogram based brain computer interface for elderly disabled. IEEE Access 2019, 7, 36380–36387. [Google Scholar] [CrossRef]
- Oostenveld, R.; Praamstra, P. The five percent electrode system for high-resolution EEG and ERP measurements. Clinical neurophysiology 2001, 112, 713–719. [Google Scholar] [CrossRef] [PubMed]
- Paranjape, R.; Mahovsky, J.; Benedicenti, L.; Koles, Z. The electroencephalogram as a biometric. In Proceedings of the Canadian Conference on Electrical and Computer Engineering 2001. Conference Proceedings (Cat. No. 01TH8555). IEEE, 2001, Vol. 2, pp. 1363–1366. [CrossRef]
- Xygonakis, I.; Athanasiou, A.; Pandria, N.; Kugiumtzis, D.; Bamidis, P.D. Decoding motor imagery through common spatial pattern filters at the EEG source space. Computational intelligence and neuroscience 2018, 2018. [Google Scholar] [CrossRef] [PubMed]
- Roy, Y.; Banville, H.; Albuquerque, I.; Gramfort, A.; Falk, T.H.; Faubert, J. Deep learning-based electroencephalography analysis: a systematic review. Journal of neural engineering 2019, 16, 051001. [Google Scholar] [CrossRef] [PubMed]
- Bigdely-Shamlo, N.; Mullen, T.; Kothe, C.; Su, K.M.; Robbins, K.A. The PREP pipeline: standardized preprocessing for large-scale EEG analysis. Frontiers in neuroinformatics 2015, 9, 16. [Google Scholar] [CrossRef] [PubMed]
- Gramfort, A.; Strohmeier, D.; Haueisen, J.; Hämäläinen, M.S.; Kowalski, M. Time-frequency mixed-norm estimates: Sparse M/EEG imaging with non-stationary source activations. NeuroImage 2013, 70, 410–422. [Google Scholar] [CrossRef] [PubMed]
- Lee, H.; Choi, S. Group nonnegative matrix factorization for EEG classification. In Proceedings of the Artificial Intelligence and Statistics. PMLR, 2009, pp. 320–327.
- Zhang, D.; Yao, L.; Chen, K.; Wang, S.; Chang, X.; Liu, Y. Making sense of spatio-temporal preserving representations for EEG-based human intention recognition. IEEE transactions on cybernetics 2019, 50, 3033–3044. [Google Scholar] [CrossRef] [PubMed]
- Vaid, S.; Singh, P.; Kaur, C. EEG signal analysis for BCI interface: A review. In Proceedings of the 2015 fifth international conference on advanced computing & communication technologies. IEEE, 2015, pp. 143–147. [CrossRef]
- Blinowska, K.; Durka, P. Electroencephalography (eeg). Wiley encyclopedia of biomedical engineering 2006. [Google Scholar]
- McFarland, D.J.; Miner, L.A.; Vaughan, T.M.; Wolpaw, J.R. Mu and beta rhythm topographies during motor imagery and actual movements. Brain topography 2000, 12, 177–186. [Google Scholar] [CrossRef]
- Decety, J. The neurophysiological basis of motor imagery. Behavioural brain research 1996, 77, 45–52. [Google Scholar] [CrossRef]
- Beisteiner, R.; Höllinger, P.; Lindinger, G.; Lang, W.; Berthoz, A. Mental representations of movements. Brain potentials associated with imagination of hand movements. Electroencephalography and Clinical Neurophysiology/Evoked Potentials Section 1995, 96, 183–193. [Google Scholar] [CrossRef] [PubMed]
- Jeannerod, M. Mental imagery in the motor context. Neuropsychologia 1995, 33, 1419–1432. [Google Scholar] [CrossRef] [PubMed]
- Lotze, M.; Halsband, U. Motor imagery. Journal of Physiology-paris 2006, 99, 386–395. [Google Scholar] [CrossRef] [PubMed]
- McAvinue, L.P.; Robertson, I.H. Measuring motor imagery ability: a review. European journal of cognitive psychology 2008, 20, 232–251. [Google Scholar] [CrossRef]
- Pfurtscheller, G.; Neuper, C. Motor imagery activates primary sensorimotor area in humans. Neuroscience letters 1997, 239, 65–68. [Google Scholar] [CrossRef] [PubMed]
- Jeon, Y.; Nam, C.S.; Kim, Y.J.; Whang, M.C. Event-related (De) synchronization (ERD/ERS) during motor imagery tasks: Implications for brain–computer interfaces. International Journal of Industrial Ergonomics 2011, 41, 428–436. [Google Scholar] [CrossRef]
- Munzert, J.; Lorey, B.; Zentgraf, K. Cognitive motor processes: the role of motor imagery in the study of motor representations. Brain research reviews 2009, 60, 306–326. [Google Scholar] [CrossRef] [PubMed]
- Dose, H.; Møller, J.S.; Iversen, H.K.; Puthusserypady, S. An end-to-end deep learning approach to MI-EEG signal classification for BCIs. Expert Systems with Applications 2018, 114, 532–542. [Google Scholar] [CrossRef]
- Pfurtscheller, G.; Da Silva, F.L. Event-related EEG/MEG synchronization and desynchronization: basic principles. Clinical neurophysiology 1999, 110, 1842–1857. [Google Scholar] [CrossRef]
- Pfurtscheller, G.; Brunner, C.; Schlögl, A.; Da Silva, F.L. Mu rhythm (de) synchronization and EEG single-trial classification of different motor imagery tasks. NeuroImage 2006, 31, 153–159. [Google Scholar] [CrossRef]
- Nam, C.S.; Jeon, Y.; Kim, Y.J.; Lee, I.; Park, K. Movement imagery-related lateralization of event-related (de) synchronization (ERD/ERS): motor-imagery duration effects. Clinical Neurophysiology 2011, 122, 567–577. [Google Scholar] [CrossRef] [PubMed]
- Dai, M.; Zheng, D.; Na, R.; Wang, S.; Zhang, S. EEG classification of motor imagery using a novel deep learning framework. Sensors 2019, 19, 551. [Google Scholar] [CrossRef] [PubMed]
- Wriessnegger, S.C.; Brunner, C.; Müller-Putz, G.R. Frequency specific cortical dynamics during motor imagery are influenced by prior physical activity. Frontiers in psychology 2018, 9, 1976. [Google Scholar] [CrossRef] [PubMed]
- Demarin, V.; Morović, S. Neuroplasticity. Periodicum biologorum 2014, 116, 209–211. [Google Scholar]
- Kaiser, V.; Bauernfeind, G.; Kreilinger, A.; Kaufmann, T.; Kübler, A.; Neuper, C.; Müller-Putz, G.R. Cortical effects of user training in a motor imagery based brain–computer interface measured by fNIRS and EEG. Neuroimage 2014, 85, 432–444. [Google Scholar] [CrossRef] [PubMed]
- Reaves, J.; Flavin, T.; Mitra, B.; Mahantesh, K.; Nagaraju, V. Assessment And Application of EEG: A Literature Review. J Appl Bioinforma Comput Biol 10 2021, 7, 2. [Google Scholar]
- Wolpaw, J.R.; Birbaumer, N.; McFarland, D.J.; Pfurtscheller, G.; Vaughan, T.M. Brain–computer interfaces for communication and control. Clinical neurophysiology 2002, 113, 767–791. [Google Scholar] [CrossRef] [PubMed]
- Schalk, G.; McFarland, D.J.; Hinterberger, T.; Birbaumer, N.; Wolpaw, J.R. BCI2000: a general-purpose brain-computer interface (BCI) system. IEEE Transactions on biomedical engineering 2004, 51, 1034–1043. [Google Scholar] [CrossRef] [PubMed]
- Aggarwal, S.; Chugh, N. Signal processing techniques for motor imagery brain computer interface: A review. Array 2019, 1, 100003. [Google Scholar] [CrossRef]
- Abiri, R.; Borhani, S.; Sellers, E.W.; Jiang, Y.; Zhao, X. A comprehensive review of EEG-based brain–computer interface paradigms. Journal of Neural Engineering 2019, 16, 011001. [Google Scholar] [CrossRef] [PubMed]
- Gasparini, F.; Cazzaniga, E.; Saibene, A. Inner speech recognition through electroencephalographic signals. arXiv 2022, arXiv:2210.06472. [Google Scholar]
- Ramele, R.; Villar, A.J.; Santos, J.M. EEG Waveform Analysis of P300 ERP with Applications to Brain Computer Interfaces. Brain Sciences 2018, 8. [Google Scholar] [CrossRef] [PubMed]
- Friman, O.; Volosyak, I.; Graser, A. Multiple Channel Detection of Steady-State Visual Evoked Potentials for Brain-Computer Interfaces. IEEE Transactions on Biomedical Engineering 2007, 54, 742–750. [Google Scholar] [CrossRef] [PubMed]
- Bhattacharyya, S.; Konar, A.; Tibarewala, D.N. Motor imagery and error related potential induced position control of a robotic arm. IEEE/CAA Journal of Automatica Sinica 2017, 4, 639–650. [Google Scholar] [CrossRef]
- Kawala-Sterniuk, A.; Browarska, N.; Al-Bakri, A.; Pelc, M.; Zygarlicki, J.; Sidikova, M.; Martinek, R.; Gorzelanczyk, E.J. Summary of over fifty years with brain-computer interfaces—A review. Brain Sciences 2021, 11, 43. [Google Scholar] [CrossRef] [PubMed]
- Xu, M.; Han, J.; Wang, Y.; Jung, T.P.; Ming, D. Implementing over 100 command codes for a high-speed hybrid brain-computer interface using concurrent P300 and SSVEP features. IEEE Transactions on Biomedical Engineering 2020, 67, 3073–3082. [Google Scholar] [CrossRef] [PubMed]
- Ma, T.; Li, H.; Deng, L.; Yang, H.; Lv, X.; Li, P.; Li, F.; Zhang, R.; Liu, T.; Yao, D.; et al. The hybrid BCI system for movement control by combining motor imagery and moving onset visual evoked potential. Journal of neural engineering 2017, 14, 026015. [Google Scholar] [CrossRef] [PubMed]
- Duan, F.; Lin, D.; Li, W.; Zhang, Z. Design of a multimodal EEG-based hybrid BCI system with visual servo module. IEEE Transactions on Autonomous Mental Development 2015, 7, 332–341. [Google Scholar] [CrossRef]
- Khan, M.A.; Das, R.; Iversen, H.K.; Puthusserypady, S. Review on motor imagery based BCI systems for upper limb post-stroke neurorehabilitation: From designing to application. Computers in Biology and Medicine 2020, 123, 103843. [Google Scholar] [CrossRef] [PubMed]
- Abdulkader, S.N.; Atia, A.; Mostafa, M.S.M. Brain computer interfacing: Applications and challenges. Egyptian Informatics Journal 2015, 16, 213–230. [Google Scholar] [CrossRef]
- Kerous, B.; Skola, F.; Liarokapis, F. EEG-based BCI and video games: a progress report. Virtual Reality 2018, 22, 119–135. [Google Scholar] [CrossRef]
- Sanchez-Fraire, U.; Parra-Vega, V.; Martinez-Peon, D.; Sepúlveda-Cervantes, G.; Sánchez-Orta, A.; Muñoz-Vázquez, A.J. On the brain computer robot interface (bcri) to control robots. IFAC-PapersOnLine 2015, 48, 154–159. [Google Scholar] [CrossRef]
- Perrin, X.; Chavarriaga, R.; Colas, F.; Siegwart, R.; Millán, J.d.R. Brain-coupled interaction for semi-autonomous navigation of an assistive robot. Robotics and Autonomous Systems 2010, 58, 1246–1255. [Google Scholar] [CrossRef]
- Balderas, D.; Ponce, P.; Lopez-Bernal, D.; Molina, A. Education 4.0: Teaching the Basis of Motor Imagery Classification Algorithms for Brain-Computer Interfaces. Future Internet 2021, 13, 202. [Google Scholar] [CrossRef]
- Myrden, A.; Chau, T. A passive EEG-BCI for single-trial detection of changes in mental state. IEEE Transactions on neural systems and rehabilitation Engineering 2017, 25, 345–356. [Google Scholar] [CrossRef] [PubMed]
- Wolpaw, J.R. Brain–computer interfaces. In Handbook of Clinical Neurology; Elsevier, 2013; Vol. 110, pp. 67–74. [CrossRef]
- Fiedler, P.; Fonseca, C.; Supriyanto, E.; Zanow, F.; Haueisen, J. A high-density 256-channel cap for dry electroencephalography. Human Brain Mapping 2022, 43, 1295–1308. [Google Scholar] [CrossRef]
- Casson, A.J.; Yates, D.C.; Smith, S.J.; Duncan, J.S.; Rodriguez-Villegas, E. Wearable electroencephalography. IEEE engineering in medicine and biology magazine 2010, 29, 44–56. [Google Scholar] [CrossRef]
- Soufineyestani, M.; Dowling, D.; Khan, A. Electroencephalography (EEG) technology applications and available devices. Applied Sciences 2020, 10, 7453. [Google Scholar] [CrossRef]
- Hu, L.; Zhang, Z. EEG signal processing and feature extraction; Springer, 2019. [CrossRef]
- Li, G.L.; Wu, J.T.; Xia, Y.H.; He, Q.G.; Jin, H.G. Review of semi-dry electrodes for EEG recording. Journal of Neural Engineering 2020, 17, 051004. [Google Scholar] [CrossRef]
- Casson, A.J. Wearable EEG and beyond. Biomedical engineering letters 2019, 9, 53–71. [Google Scholar] [CrossRef] [PubMed]
- Mihajlović, V.; Grundlehner, B.; Vullers, R.; Penders, J. Wearable, wireless EEG solutions in daily life applications: what are we missing? IEEE journal of biomedical and health informatics 2014, 19, 6–21. [Google Scholar] [CrossRef] [PubMed]
- Blum, S.; Emkes, R.; Minow, F.; Anlauff, J.; Finke, A.; Debener, S. Flex-printed forehead EEG sensors (fEEGrid) for long-term EEG acquisition. Journal of neural engineering 2020, 17, 034003. [Google Scholar] [CrossRef] [PubMed]
- You, S.; Cho, B.H.; Yook, S.; Kim, J.Y.; Shon, Y.M.; Seo, D.W.; Kim, I.Y. Unsupervised automatic seizure detection for focal-onset seizures recorded with behind-the-ear EEG using an anomaly-detecting generative adversarial network. Computer Methods and Programs in Biomedicine 2020, 193, 105472. [Google Scholar] [CrossRef] [PubMed]
- Do Valle, B.G.; Cash, S.S.; Sodini, C.G. Wireless behind-the-ear EEG recording device with wireless interface to a mobile device (iPhone/iPod touch). In Proceedings of the 2014 36th Annual International Conference of the IEEE Engineering in Medicine and Biology Society. IEEE, 2014, pp. 5952–5955. [CrossRef]
- Wang, Y.; Yin, L.; Bai, Y.; Liu, S.; Wang, L.; Zhou, Y.; Hou, C.; Yang, Z.; Wu, H.; Ma, J.; et al. Electrically compensated, tattoo-like electrodes for epidermal electrophysiology at scale. Science advances 2020, 6, eabd0996. [Google Scholar] [CrossRef] [PubMed]
- Wang, H.; Wang, J.; Chen, D.; Ge, S.; Liu, Y.; Wang, Z.; Zhang, X.; Guo, Q.; Yang, J. Robust tattoo electrode prepared by paper-assisted water transfer printing for wearable health monitoring. IEEE Sensors Journal 2022. [Google Scholar] [CrossRef]
- Casson, A.J.; Abdulaal, M.; Dulabh, M.; Kohli, S.; Krachunov, S.; Trimble, E. Electroencephalogram. In Seamless healthcare monitoring; Springer, 2018; pp. 45–81. [CrossRef]
- Palumbo, A.; Gramigna, V.; Calabrese, B.; Ielpo, N. Motor-imagery EEG-based BCIs in wheelchair movement and control: A systematic literature review. Sensors 2021, 21, 6285. [Google Scholar] [CrossRef]
- Abiri, R.; Borhani, S.; Sellers, E.W.; Jiang, Y.; Zhao, X. A comprehensive review of EEG-based brain–computer interface paradigms. Journal of neural engineering 2019, 16, 011001. [Google Scholar] [CrossRef] [PubMed]
- Udovičić, G.; Topić, A.; Russo, M. Wearable technologies for smart environments: a review with emphasis on BCI. In Proceedings of the 2016 24th International Conference on Software, Telecommunications and Computer Networks (SoftCOM). IEEE, 2016, pp. 1–9. [CrossRef]
- TajDini, M.; Sokolov, V.; Kuzminykh, I.; Shiaeles, S.; Ghita, B. Wireless sensors for brain activity—a survey. Electronics 2020, 9, 2092. [Google Scholar] [CrossRef]
- Portillo-Lara, R.; Tahirbegi, B.; Chapman, C.A.; Goding, J.A.; Green, R.A. Mind the gap: State-of-the-art technologies and applications for EEG-based brain–computer interfaces. APL bioengineering 2021, 5, 031507. [Google Scholar] [CrossRef] [PubMed]
- Jamil, N.; Belkacem, A.N.; Ouhbi, S.; Lakas, A. Noninvasive Electroencephalography Equipment for Assistive, Adaptive, and Rehabilitative Brain–Computer Interfaces: A Systematic Literature Review. Sensors 2021, 21, 4754. [Google Scholar] [CrossRef]
- Gu, X.; Cao, Z.; Jolfaei, A.; Xu, P.; Wu, D.; Jung, T.P.; Lin, C.T. EEG-based brain-computer interfaces (BCIs): A survey of recent studies on signal sensing technologies and computational intelligence approaches and their applications. IEEE/ACM transactions on computational biology and bioinformatics 2021, 18, 1645–1666. [Google Scholar] [CrossRef] [PubMed]
- Neuper, C.; Pfurtscheller, G. Neurofeedback training for BCI control. Brain-computer interfaces, 2009, pp. 65–78. [CrossRef]
- Jiang, Y.; Hau, N.T.; Chung, W.Y. Semiasynchronous BCI using wearable two-channel EEG. IEEE Transactions on Cognitive and Developmental Systems 2017, 10, 681–686. [Google Scholar] [CrossRef]
- Mattia, D.; Pichiorri, F.; Colamarino, E.; Masciullo, M.; Morone, G.; Toppi, J.; Pisotta, I.; Tamburella, F.; Lorusso, M.; Paolucci, S.; et al. The Promotoer, a brain-computer interface-assisted intervention to promote upper limb functional motor recovery after stroke: a study protocol for a randomized controlled trial to test early and long-term efficacy and to identify determinants of response. BMC neurology 2020, 20, 1–13. [Google Scholar] [CrossRef] [PubMed]
- Barria, P.; Pino, A.; Tovar, N.; Gomez-Vargas, D.; Baleta, K.; Díaz, C.A.; Múnera, M.; Cifuentes, C.A. BCI-Based Control for Ankle Exoskeleton T-FLEX: Comparison of Visual and Haptic Stimuli with Stroke Survivors. Sensors 2021, 21, 6431. [Google Scholar] [CrossRef] [PubMed]
- Karakullukcu, N.; Yilmaz, B. Detection of Movement Intention in EEG-Based Brain-Computer Interfaces Using Fourier-Based Synchrosqueezing Transform. International Journal of Neural Systems 2022, 32, 2150059. [Google Scholar] [CrossRef]
- Du Bois, N.; Bigirimana, A.D.; Korik, A.; Kéthina, L.G.; Rutembesa, E.; Mutabaruka, J.; Mutesa, L.; Prasad, G.; Jansen, S.; Coyle, D. Neurofeedback with low-cost, wearable electroencephalography (EEG) reduces symptoms in chronic Post-Traumatic Stress Disorder. Journal of affective disorders 2021, 295, 1319–1334. [Google Scholar] [CrossRef] [PubMed]
- Looned, R.; Webb, J.; Xiao, Z.G.; Menon, C. Assisting drinking with an affordable BCI-controlled wearable robot and electrical stimulation: a preliminary investigation. Journal of neuroengineering and rehabilitation 2014, 11, 1–13. [Google Scholar] [CrossRef] [PubMed]
- Li, Z.; Yuan, Y.; Luo, L.; Su, W.; Zhao, K.; Xu, C.; Huang, J.; Pi, M. Hybrid brain/muscle signals powered wearable walking exoskeleton enhancing motor ability in climbing stairs activity. IEEE Transactions on Medical Robotics and Bionics 2019, 1, 218–227. [Google Scholar] [CrossRef]
- Vourvopoulos, A.; Jorge, C.; Abreu, R.; Figueiredo, P.; Fernandes, J.C.; Bermudez i Badia, S. Efficacy and brain imaging correlates of an immersive motor imagery BCI-driven VR system for upper limb motor rehabilitation: A clinical case report. Frontiers in human neuroscience 2019, 13, 244. [Google Scholar] [CrossRef] [PubMed]
- Kong, W.; Fu, S.; Deng, B.; Zeng, H.; Zhang, J.; Guo, S. Embedded BCI Rehabilitation System for Stroke. Journal of Beijing Institute of Technology 2019, 28, 35–41. [Google Scholar]
- Athanasiou, A.; Arfaras, G.; Xygonakis, I.; Kartsidis, P.; Pandria, N.; Kavazidi, K.R.; Astaras, A.; Foroglou, N.; Polyzoidis, K.; Bamidis, P.D. Commercial BCI Control and functional brain networks in spinal cord injury: a proof-of-concept. In Proceedings of the 2017 IEEE 30th International Symposium on Computer-Based Medical Systems (CBMS). IEEE, 2017, pp. 262–267. [CrossRef]
- Simon, C.; Ruddy, K.L. A wireless, wearable Brain-Computer Interface for neurorehabilitation at home; A feasibility study. In Proceedings of the 2022 10th International Winter Conference on Brain-Computer Interface (BCI). IEEE, 2022, pp. 1–6. [CrossRef]
- Quiles, E.; Suay, F.; Candela, G.; Chio, N.; Jiménez, M.; Álvarez-Kurogi, L. Low-cost robotic guide based on a motor imagery brain–computer interface for arm assisted rehabilitation. International journal of environmental research and public health 2020, 17, 699. [Google Scholar] [CrossRef]
- Cardoso, V.F.; Delisle-Rodriguez, D.; Romero-Laiseca, M.A.; Loterio, F.A.; Gurve, D.; Floriano, A.; Valadão, C.; Silva, L.; Krishnan, S.; Frizera-Neto, A.; et al. Effect of a Brain–Computer Interface Based on Pedaling Motor Imagery on Cortical Excitability and Connectivity. Sensors 2021, 21, 2020. [Google Scholar] [CrossRef]
- Wang, H.; Bezerianos, A. Brain-controlled wheelchair controlled by sustained and brief motor imagery BCIs. Electronics Letters 2017, 53, 1178–1180. [Google Scholar] [CrossRef]
- Lisi, G.; Hamaya, M.; Noda, T.; Morimoto, J. Dry-wireless EEG and asynchronous adaptive feature extraction towards a plug-and-play co-adaptive brain robot interface. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2016, pp. 959–966. [CrossRef]
- Carrino, F.; Dumoulin, J.; Mugellini, E.; Abou Khaled, O.; Ingold, R. A self-paced BCI system to control an electric wheelchair: Evaluation of a commercial, low-cost EEG device. In Proceedings of the 2012 ISSNIP biosignals and biorobotics conference: biosignals and robotics for better and safer living (BRC). IEEE, 2012, pp. 1–6. [CrossRef]
- Gant, K.; Guerra, S.; Zimmerman, L.; Parks, B.A.; Prins, N.W.; Prasad, A. EEG-controlled functional electrical stimulation for hand opening and closing in chronic complete cervical spinal cord injury. Biomedical physics & engineering express 2018, 4, 065005. [Google Scholar]
- Gaxiola-Tirado, J.A.; Iáñez, E.; Ortíz, M.; Gutiérrez, D.; Azorín, J.M. Effects of an exoskeleton-assisted gait motor imagery training in functional brain connectivity. In Proceedings of the 2019 41st Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC). IEEE, 2019, pp. 429–432. [CrossRef]
- Khan, M.J.; Hong, K.S.; Naseer, N.; Bhutta, M.R. Motor imagery performance evaluation using hybrid EEG-NIRS for BCI. In Proceedings of the 2015 54th Annual Conference of the Society of Instrument and Control Engineers of Japan (SICE). IEEE, 2015, pp. 1150–1155. [CrossRef]
- Freer, D.; Yang, G.Z. MIndGrasp: A New Training and Testing Framework for Motor Imagery Based 3-Dimensional Assistive Robotic Control. arXiv 2020, arXiv:2003.00369. [Google Scholar]
- Jameel, H.F.; Mohammed, S.L.; Gharghan, S.K. Electroencephalograph-based wheelchair controlling system for the people with motor disability using advanced brainwear. In Proceedings of the 2019 12th International Conference on Developments in eSystems Engineering (DeSE). IEEE, 2019, pp. 843–848. [CrossRef]
- Ketola, E.; Lloyd, C.; Shuhart, D.; Schmidt, J.; Morenz, R.; Khondker, A.; Imtiaz, M. Lessons Learned from the Initial Development of a Brain Controlled Assistive Device. In Proceedings of the 2022 IEEE 12th Annual Computing and Communication Workshop and Conference (CCWC). IEEE, 2022, pp. 0580–0585. [CrossRef]
- Permana, K.; Wijaya, S.; Prajitno, P. Controlled wheelchair based on brain computer interface using Neurosky Mindwave Mobile 2. In Proceedings of the AIP Conference Proceedings. AIP Publishing LLC, 2019, Vol. 2168, p. 020022. [CrossRef]
- Priyatno, S.B.; Prakoso, T.; Riyadi, M.A. Classification of motor imagery brain wave for bionic hand movement using multilayer perceptron. Sinergi 2022, 26, 57–64. [Google Scholar] [CrossRef]
- Tang, X.; Li, W.; Li, X.; Ma, W.; Dang, X. Motor imagery EEG recognition based on conditional optimization empirical mode decomposition and multi-scale convolutional neural network. Expert Systems with Applications 2020, 149, 113285. [Google Scholar] [CrossRef]
- Apicella, A.; Arpaia, P.; Frosolone, M.; Moccaldi, N. High-wearable EEG-based distraction detection in motor rehabilitation. Scientific Reports 2021, 11, 1–9. [Google Scholar] [CrossRef] [PubMed]
- Garcia-Moreno, F.M.; Bermudez-Edo, M.; Rodríguez-Fórtiz, M.J.; Garrido, J.L. A CNN-LSTM deep Learning classifier for motor imagery EEG detection using a low-invasive and low-Cost BCI headband. In Proceedings of the 2020 16th International Conference on Intelligent Environments (IE). IEEE, 2020, pp. 84–91. [CrossRef]
- Peterson, V.; Galván, C.; Hernández, H.; Spies, R. A feasibility study of a complete low-cost consumer-grade brain-computer interface system. Heliyon 2020, 6, e03425. [Google Scholar] [CrossRef]
- Tariq, M.; Trivailo, P.M.; Simic, M. Motor imagery based EEG features visualization for BCI applications. Procedia computer science 2018, 126, 1936–1944. [Google Scholar] [CrossRef]
- Zhang, X.; Yao, L.; Sheng, Q.Z.; Kanhere, S.S.; Gu, T.; Zhang, D. Converting your thoughts to texts: Enabling brain typing via deep feature learning of eeg signals. In Proceedings of the 2018 IEEE international conference on pervasive computing and communications (PerCom). IEEE, 2018, pp. 1–10. [CrossRef]
- Chowdhury, A.; Raza, H.; Meena, Y.K.; Dutta, A.; Prasad, G. Online covariate shift detection-based adaptive brain–computer interface to trigger hand exoskeleton feedback for neuro-rehabilitation. IEEE Transactions on Cognitive and Developmental Systems 2017, 10, 1070–1080. [Google Scholar] [CrossRef]
- Daeglau, M.; Wallhoff, F.; Debener, S.; Condro, I.S.; Kranczioch, C.; Zich, C. Challenge accepted? Individual performance gains for motor imagery practice with humanoid robotic EEG neurofeedback. Sensors 2020, 20, 1620. [Google Scholar] [CrossRef]
- LaFleur, K.; Cassady, K.; Doud, A.; Shades, K.; Rogin, E.; He, B. Quadcopter control in three-dimensional space using a noninvasive motor imagery-based brain–computer interface. Journal of neural engineering 2013, 10, 046003. [Google Scholar] [CrossRef] [PubMed]
- Alanis-Espinosa, M.; Gutiérrez, D. On the assessment of functional connectivity in an immersive brain-computer interface during motor imagery. Frontiers in Psychology 2020, 11, 1301. [Google Scholar] [CrossRef] [PubMed]
- Xu, B.; Li, W.; He, X.; Wei, Z.; Zhang, D.; Wu, C.; Song, A. Motor imagery based continuous teleoperation robot control with tactile feedback. Electronics 2020, 9, 174. [Google Scholar] [CrossRef]
- Zhuang, J.; Geng, K.; Yin, G. Ensemble learning based brain–computer interface system for ground vehicle control. IEEE Transactions on Systems, Man, and Cybernetics: Systems 2019, 51, 5392–5404. [Google Scholar] [CrossRef]
- Liu, Y.; Habibnezhad, M.; Jebelli, H. Brain-computer interface for hands-free teleoperation of construction robots. Automation in Construction 2021, 123, 103523. [Google Scholar] [CrossRef]
- Mahmood, M.; Kwon, S.; Kim, H.; Kim, Y.S.; Siriaraya, P.; Choi, J.; Otkhmezuri, B.; Kang, K.; Yu, K.J.; Jang, Y.C.; et al. Wireless Soft Scalp Electronics and Virtual Reality System for Motor Imagery-Based Brain–Machine Interfaces. Advanced Science 2021, 8, 2101129. [Google Scholar] [CrossRef]
- Djamal, E.C.; Abdullah, M.Y.; Renaldi, F. Brain computer interface game controlling using fast fourier transform and learning vector quantization. Journal of Telecommunication, Electronic and Computer Engineering (JTEC) 2017, 9, 71–74. [Google Scholar]
- Mitocaru, A.; Poboroniuc, M.S.; Irimia, D.; Baciu, A. Comparison Between Two Brain Computer Interface Systems Aiming to Control a Mobile Robot. In Proceedings of the 2021 International Conference on Electromechanical and Energy Systems (SIELMEN). IEEE, 2021, pp. 1–5. [CrossRef]
- Mwata-Velu, T.; Ruiz-Pinales, J.; Rostro-Gonzalez, H.; Ibarra-Manzano, M.A.; Cruz-Duarte, J.M.; Avina-Cervantes, J.G. Motor imagery classification based on a recurrent-convolutional architecture to control a hexapod robot. Mathematics 2021, 9, 606. [Google Scholar] [CrossRef]
- Parikh, D.; George, K. Quadcopter Control in Three-Dimensional Space Using SSVEP and Motor Imagery-Based Brain-Computer Interface. In Proceedings of the 2020 11th IEEE Annual Information Technology, Electronics and Mobile Communication Conference (IEMCON). IEEE, 2020, pp. 0782–0785. [CrossRef]
- Wu, S.L.; Liu, Y.T.; Chou, K.P.; Lin, Y.Y.; Lu, J.; Zhang, G.; Chuang, C.H.; Lin, W.C.; Lin, C.T. A motor imagery based brain-computer interface system via swarm-optimized fuzzy integral and its application. In Proceedings of the 2016 IEEE International Conference on Fuzzy Systems (FUZZ-IEEE). IEEE, 2016, pp. 2495–2500. [CrossRef]
- Abdulwahab, S.S.; Khleaf, H.K.; Jassim, M.H. EEG Motor-Imagery BCI System Based on Maximum Overlap Discrete Wavelet Transform (MODWT) and cubic SVM. Journal of Physics: Conference Series. IOP Publishing, 2021, Vol. 1973, p. 012056. [CrossRef]
- Freer, D.; Deligianni, F.; Yang, G.Z. Adaptive Riemannian BCI for enhanced motor imagery training protocols. In Proceedings of the 2019 IEEE 16th International Conference on Wearable and Implantable Body Sensor Networks (BSN). IEEE, 2019, pp. 1–4. [CrossRef]
- Garcia-Moreno, F.M.; Bermudez-Edo, M.; Garrido, J.L.; Rodríguez-Fórtiz, M.J. Reducing response time in motor imagery using a headband and deep learning. Sensors 2020, 20, 6730. [Google Scholar] [CrossRef] [PubMed]
- Guan, S.; Li, J.; Wang, F.; Yuan, Z.; Kang, X.; Lu, B. Discriminating three motor imagery states of the same joint for brain-computer interface. PeerJ 2021, 9, e12027. [Google Scholar] [CrossRef] [PubMed]
- Guan, S.; Zhao, K.; Yang, S. Motor imagery EEG classification based on decision tree framework and Riemannian geometry. Computational intelligence and neuroscience 2019, 2019. [Google Scholar] [CrossRef] [PubMed]
- Jawanjalkar, A.R.; Padole, D.V. Development of soft computing technique for classification of EEG signal. In Proceedings of the 2017 International Conference on Innovations in Information, Embedded and Communication Systems (ICIIECS). IEEE, 2017, pp. 1–6. [CrossRef]
- Khan, J.; Bhatti, M.H.; Khan, U.G.; Iqbal, R. Multiclass EEG motor-imagery classification with sub-band common spatial patterns. EURASIP Journal on Wireless Communications and Networking 2019, 2019, 1–9. [Google Scholar] [CrossRef]
- Kim, H.H.; Jeong, J. Decoding electroencephalographic signals for direction in brain-computer interface using echo state network and Gaussian readouts. Computers in biology and medicine 2019, 110, 254–264. [Google Scholar] [CrossRef] [PubMed]
- Lisi, G.; Rivela, D.; Takai, A.; Morimoto, J. Markov switching model for quick detection of event related desynchronization in EEG. Frontiers in neuroscience 2018, 12, 24. [Google Scholar] [CrossRef]
- Lo, C.C.; Chien, T.Y.; Chen, Y.C.; Tsai, S.H.; Fang, W.C.; Lin, B.S. A wearable channel selection-based brain-computer interface for motor imagery detection. Sensors 2016, 16, 213. [Google Scholar] [CrossRef]
- Mladenov, T.; Kim, K.; Nooshabadi, S. Accurate motor imagery based dry electrode brain-computer interface system for consumer applications. In Proceedings of the 2012 IEEE 16th International Symposium on Consumer Electronics. IEEE, 2012, pp. 1–4. [CrossRef]
- Rodriguez-Ugarte, M.D.l.S.; Iáñez, E.; Ortiz-Garcia, M.; Azorín, J.M. Effects of tDCS on real-time BCI detection of pedaling motor imagery. Sensors 2018, 18, 1136. [Google Scholar] [CrossRef]
- Riyadi, M.A.; Setiawan, I.; Amir, A. EEG Multiclass Signal Classification Based on Subtractive Clustering-ANFIS and Wavelet Packet Decomposition. In Proceedings of the 2021 International Conference on Electrical and Information Technology (IEIT). IEEE, 2021, pp. 81–86. [CrossRef]
- Shajil, N.; Mohan, S.; Srinivasan, P.; Arivudaiyanambi, J.; Arasappan Murrugesan, A. Multiclass classification of spatially filtered motor imagery EEG signals using convolutional neural network for BCI based applications. Journal of Medical and Biological Engineering 2020, 40, 663–672. [Google Scholar] [CrossRef]
- Shajil, N.; Sasikala, M.; Arunnagiri, A. Deep learning classification of two-class motor imagery EEG signals using transfer learning. In Proceedings of the 2020 International Conference on e-Health and Bioengineering (EHB). IEEE, 2020, pp. 1–4. [CrossRef]
- Tiwari, S.; Goel, S.; Bhardwaj, A. Machine learning approach for the classification of EEG signals of multiple imagery tasks. In Proceedings of the 2020 11th International Conference on Computing, Communication and Networking Technologies (ICCCNT). IEEE, 2020, pp. 1–7. [CrossRef]
- Triana Guzmán, N.; Orjuela-Cañón, Á.D.; Jutinico Alarcon, A.L. Incremental training of neural network for motor tasks recognition based on brain-computer interface. In Proceedings of the Iberoamerican Congress on Pattern Recognition. Springer, 2019, pp. 610–619. [CrossRef]
- Yang, B.; Tang, J.; Guan, C.; Li, B. Motor imagery EEG recognition based on FBCSP and PCA. In Proceedings of the International Conference on Brain Inspired Cognitive Systems. Springer, 2018, pp. 195–205. [CrossRef]
- Yang, D.; Nguyen, T.H.; Chung, W.Y. A Synchronized Hybrid Brain-Computer Interface System for Simultaneous Detection and Classification of Fusion EEG Signals. Complexity 2020, 2020. [Google Scholar] [CrossRef]
- Yusoff, M.Z.; Mahmoud, D.; Malik, A.S.; Bahloul, M.R.; et al. Discrimination of four class simple limb motor imagery movements for brain–computer interface. Biomedical Signal Processing and Control 2018, 44, 181–190. [Google Scholar]
- Zhou, B.; Wu, X.; Lv, Z.; Zhang, L.; Zhang, C. Independent component analysis combined with compressed sensing for EEG compression in BCI. In Proceedings of the 2015 10th International Conference on Information, Communications and Signal Processing (ICICS). IEEE, 2015, pp. 1–4. [CrossRef]
- Zich, C.; Schweinitz, C.; Debener, S.; Kranczioch, C. Multimodal evaluation of motor imagery training supported by mobile EEG at home: A case report. In Proceedings of the 2015 IEEE International Conference on Systems, Man, and Cybernetics. IEEE, 2015, pp. 3181–3186. [CrossRef]
- Verma, P.; Heilinger, A.; Reitner, P.; Grünwald, J.; Guger, C.; Franklin, D. Performance investigation of brain-computer interfaces that combine EEG and fNIRS for motor imagery tasks. In Proceedings of the 2019 IEEE International Conference on Systems, Man and Cybernetics (SMC). IEEE, 2019, pp. 259–263. [CrossRef]
- Rodríguez-Ugarte, M.; Angulo-Sherman, I.; Iáñez, E.; Ortiz, M.; Azorín, J. Preliminary study of pedaling motor imagery classification based on EEG signals. In Proceedings of the 2017 International Symposium on Wearable Robotics and Rehabilitation (WeRob). IEEE, 2017, pp. 1–2. [CrossRef]
- Hirsch, G.; Dirodi, M.; Xu, R.; Reitner, P.; Guger, C. Online classification of motor imagery using EEG and fNIRS: a hybrid approach with real time human-computer interaction. In Proceedings of the International Conference on Human-Computer Interaction. Springer, 2020, pp. 231–238. [CrossRef]
- Dehzangi, O.; Zou, Y.; Jafari, R. Simultaneous classification of motor imagery and SSVEP EEG signals. 2013 6th International IEEE/EMBS Conference on Neural Engineering (NER). IEEE, 2013, pp. 1303–1306. [CrossRef]
- Cha, K.; Lee, J.; Kim, H.; Kim, C.; Lee, S. Steady-State Somatosensory Evoked Potential based Brain-Computer Interface for Sit-to-Stand Movement Intention. In Proceedings of the 2019 7th International Winter Conference on Brain-Computer Interface (BCI). IEEE, 2019, pp. 1–3. [CrossRef]
- Arfaras, G.; Athanasiou, A.; Pandria, N.; Kavazidi, K.R.; Kartsidis, P.; Astaras, A.; Bamidis, P.D. Visual versus kinesthetic motor imagery for BCI control of robotic arms (Mercury 2.0). In Proceedings of the 2017 IEEE 30th International Symposium on Computer-Based Medical Systems (CBMS). IEEE, 2017, pp. 440–445. [CrossRef]
- Angrisani, L.; Arpaia, P.; Donnarumma, F.; Esposito, A.; Frosolone, M.; Improta, G.; Moccaldi, N.; Natalizio, A.; Parvis, M. Instrumentation for Motor Imagery-based Brain Computer Interfaces relying on dry electrodes: a functional analysis. In Proceedings of the 2020 IEEE International Instrumentation and Measurement Technology Conference (I2MTC). IEEE, 2020, pp. 1–6. [CrossRef]
- Bista, S.; BikramAdhikari, N. Performance Analysis of Tri-channel Active Electrode EEG Device Designed for Classification of Motor Imagery Brainwaves for Brain ComputerInterface. In Proceedings of the 2018 International Conference on Advances in Computing, Communication Control and Networking (ICACCCN). IEEE, 2018, pp. 662–667.
- Liao, L.D.; Wu, S.L.; Liou, C.H.; Lu, S.W.; Chen, S.A.; Chen, S.F.; Ko, L.W.; Lin, C.T. A novel 16-channel wireless system for electroencephalography measurements with dry spring-loaded sensors. IEEE Transactions on Instrumentation and Measurement 2014, 63, 1545–1555. [Google Scholar] [CrossRef]
- Lin, C.L.; Chu, T.Y.; Wu, P.J.; Wang, C.A.; Lin, B.S. Design of wearable brain computer interface based on motor imagery. In Proceedings of the 2014 Tenth International Conference on Intelligent Information Hiding and Multimedia Signal Processing. IEEE, 2014, pp. 33–36. [CrossRef]
- Lin, B.S.; Pan, J.S.; Chu, T.Y.; Lin, B.S. Development of a wearable motor-imagery-based brain–computer interface. Journal of medical systems 2016, 40, 1–8. [Google Scholar] [CrossRef] [PubMed]
- Vourvopoulos, A.; Niforatos, E.; Giannakos, M. EEGlass: An EEG-eyeware prototype for ubiquitous brain-computer interaction. Adjunct proceedings of the 2019 ACM international joint conference on pervasive and ubiquitous computing and proceedings of the 2019 ACM international symposium on wearable computers, 2019, pp. 647–652. [CrossRef]
- Zhang, Y.; Zhang, X.; Sun, H.; Fan, Z.; Zhong, X. Portable brain-computer interface based on novel convolutional neural network. Computers in biology and medicine 2019, 107, 248–256. [Google Scholar] [CrossRef] [PubMed]
- Venot, T.; Corsi, M.C.; Saint-Bauzel, L.; de Vico Fallani, F. Towards multimodal BCIs: the impact of peripheral control on motor cortex activity and sense of agency. In Proceedings of the 2021 43rd Annual International Conference of the IEEE Engineering in Medicine & Biology Society (EMBC). IEEE, 2021, pp. 5876–5879. [CrossRef]
- Abdalsalam, E.; Yusoff, M.Z.; Malik, A.; Kamel, N.S.; Mahmoud, D. Modulation of sensorimotor rhythms for brain-computer interface using motor imagery with online feedback. Signal, Image and Video Processing 2018, 12, 557–564. [Google Scholar] [CrossRef]
- Paszkiel, S.; Dobrakowski, P. Brain–computer technology-based training system in the field of motor imagery. IET Science, Measurement & Technology 2020, 14, 1014–1018. [Google Scholar]
- Zich, C.; De Vos, M.; Kranczioch, C.; Debener, S. Wireless EEG with individualized channel layout enables efficient motor imagery training. Clinical Neurophysiology 2015, 126, 698–710. [Google Scholar] [CrossRef] [PubMed]
- Advanced Brain Monitoring, I. B-Alert X-Series Wireless & Mobile EEG System. Available online: https://www.advancedbrainmonitoring.com/products/b-alert-x-series (accessed on 03 October 2022).
- bio medical.com. BrainMaster Discovery 24E - 24 Channel qEEG. Available online: https://bio-medical.com/brainmaster-discovery-24e-24-channel-qeeg.html (accessed on 03 October 2022).
- by Shopify, O.O.S.P. Cyton Biosensing Board (8-channels) – OpenBCI Online Store. Available online: https://shop.openbci.com/products/cyton-biosensing-board-8-channel?variant=38958638542 (accessed on 03 October 2022).
- Neuro, A. eego™rt | ANT Neuro. Available online: https://www.ant-neuro.com/products/eego_rt (accessed on 03 October 2022).
- Peterson, V.; Wyser, D.; Lambercy, O.; Spies, R.; Gassert, R. A penalized time-frequency band feature selection and classification procedure for improved motor intention decoding in multichannel EEG. Journal of neural engineering 2019, 16, 016019. [Google Scholar] [CrossRef] [PubMed]
- Neuroelectrics. Enobio 20 | Solutions | Neuroelectrics. Available online: https://www.neuroelectrics.com/solutions/enobio/20 (accessed on 03 October 2022).
- Neuroelectrics. Enobio 8 | Solutions | Neuroelectrics. Available online: https://www.neuroelectrics.com/solutions/enobio/8 (accessed on 03 October 2022).
- EMOTIV. EMOTIV EPOC+ 14-Channel Wireless EEG Headset - EMOTIV. Available online: https://www.emotiv.com/epoc/ (accessed on 03 October 2022).
- Zhang, S.; Yuan, S.; Huang, L.; Zheng, X.; Wu, Z.; Xu, K.; Pan, G. Human mind control of rat cyborg’s continuous locomotion with wireless brain-to-brain interface. Scientific reports 2019, 9, 1–12. [Google Scholar] [CrossRef] [PubMed]
- EMOTIV. EPOC Flex - 32-Channel Wireless EEG Device - EMOTIV. Available online: https://www.emotiv.com/epoc-flex/ (accessed on 03 October 2022).
- EMOTIV. EMOTIV EPOC X - 14 Channel Wireless EEG Headset - EMOTIV. Available online: https://www.emotiv.com/epoc-x/ (accessed on 03 October 2022).
- g.tec medical engineering GmbH Austria. g.USBAMP RESEARCH | EEG/Biosignal Amplifier | g.tec medical engineering GmbH medical engineering. Available online: https://www.gtec.at/product/gusbamp-research/ (accessed on 03 October 2022).
- ab medica s.p.a.. Dispositivi medici innovativi - Robotica - Telemedicina - ab medica. Available online: https://www.abmedica.it/ (accessed on 03 October 2022).
- EMOTIV. Insight Brainwear® 5 Channel Wireless EEG Headset - EMOTIV. Available online: https://www.emotiv.com/insight/ (accessed on 03 October 2022).
- NeuroSky. MindWave. Available online: https://store.neurosky.com/pages/mindwave (accessed on 03 October 2022).
- Kevric, J.; Subasi, A. The impact of Mspca signal de-noising in real-time wireless brain computer interface system. Southeast Europe Journal of Soft Computing 2015, 4. [Google Scholar] [CrossRef]
- Muse. Muse 2: Brain Sensing Headband - Technology Enhanced Meditation. Available online: https://choosemuse.com/muse-2/ (accessed on 03 October 2022).
- g.tec medical engineering GmbH Austria. g.Nautilus Multiple Biosignal Recording | g.tec medical engineering GmbH. Available online: https://www.gtec.at/product/gnautilus-multipurpose/ (accessed on 03 October 2022).
- g.tec medical engineering GmbH Austria. g.Nautilus PRO Wearable EEG | g.tec medical engineering GmbH. Available online: https://www.gtec.at/product/gnautilus-pro/ (accessed on 03 October 2022).
- g.tec medical engineering GmbH Austria. g.NAUTILUS RESEARCH | Wearable EEG Headset | g.tec medical engineering GmbH. Available online: https://www.gtec.at/product/gnautilus-research/ (accessed on 03 October 2022).
- Neuroscan, C. nuamps – Compumedics Neuroscan. Available online: https://compumedicsneuroscan.com/nuamps-4/ (accessed on 03 October 2022).
- COGNIONICS, I. Quick-20 Dry EEG Headset (2). Available online: http://www.cognionics.com/index.php/32-uncategorised/94-quick-20-dry-headset-2 (accessed on 03 October 2022).
- Neuroelectrics. Starstim® tES-EEG systems | Neuroelectrics. Available online: https://www.neuroelectrics.com/solutions/starstim (accessed on 03 October 2022).
- AG, N. Synamps 2/RT | NEUROSPEC AG Research Neurosciences. Available online: https://www.neurospec.com/Products/Details/1017/synamps-2rt (accessed on 03 October 2022).
- Rashmi, C.; Shantala, C. EEG artifacts detection and removal techniques for brain computer interface applications: a systematic review. International Journal of Advanced Technology and Engineering Exploration 2022, 9, 354. [Google Scholar]
- Fatourechi, M.; Bashashati, A.; Ward, R.K.; Birch, G.E. EMG and EOG artifacts in brain computer interface systems: A survey. Clinical Neurophysiology 2007, 118, 480–494. [Google Scholar] [CrossRef] [PubMed]
- Seok, D.; Lee, S.; Kim, M.; Cho, J.; Kim, C. Motion artifact removal techniques for wearable EEG and PPG sensor systems. Frontiers in Electronics 2021, 2, 685513. [Google Scholar] [CrossRef]
- Delorme, A.; Makeig, S. EEGLAB: an open source toolbox for analysis of single-trial EEG dynamics including independent component analysis. Journal of neuroscience methods 2004, 134, 9–21. [Google Scholar] [CrossRef] [PubMed]
- Blankertz, B.; Muller, K.R.; Krusienski, D.J.; Schalk, G.; Wolpaw, J.R.; Schlogl, A.; Pfurtscheller, G.; Millan, J.R.; Schroder, M.; Birbaumer, N. The BCI competition III: Validating alternative approaches to actual BCI problems. IEEE transactions on neural systems and rehabilitation engineering 2006, 14, 153–159. [Google Scholar] [CrossRef] [PubMed]
- Tangermann, M.; Müller, K.R.; Aertsen, A.; Birbaumer, N.; Braun, C.; Brunner, C.; Leeb, R.; Mehring, C.; Miller, K.J.; Mueller-Putz, G. ; others. Review of the BCI competition IV. Frontiers in neuroscience, 2012, p. 55. [CrossRef]
- Goldberger, A.L.; Amaral, L.A.; Glass, L.; Hausdorff, J.M.; Ivanov, P.C.; Mark, R.G.; Mietus, J.E.; Moody, G.B.; Peng, C.K.; Stanley, H.E. PhysioBank, PhysioToolkit, and PhysioNet: components of a new research resource for complex physiologic signals. circulation 2000, 101, e215–e220. [Google Scholar] [CrossRef] [PubMed]
- Kaya, M.; Binli, M.K.; Ozbay, E.; Yanar, H.; Mishchenko, Y. A large electroencephalographic motor imagery dataset for electroencephalographic brain computer interfaces. Scientific data 2018, 5, 1–16. [Google Scholar] [CrossRef] [PubMed]
- Leeb, R.; Lee, F.; Keinrath, C.; Scherer, R.; Bischof, H.; Pfurtscheller, G. Brain–computer communication: motivation, aim, and impact of exploring a virtual apartment. IEEE Transactions on Neural Systems and Rehabilitation Engineering 2007, 15, 473–482. [Google Scholar] [CrossRef] [PubMed]
- Covi, E.; Donati, E.; Liang, X.; Kappel, D.; Heidari, H.; Payvand, M.; Wang, W. Adaptive extreme edge computing for wearable devices. Frontiers in Neuroscience, 2021, p. 429. [CrossRef]
- Jin, X.; Li, L.; Dang, F.; Chen, X.; Liu, Y. A survey on edge computing for wearable technology. Digital Signal Processing 2022, 125, 103146. [Google Scholar] [CrossRef]
- Huang, D.; Wang, M.; Wang, J.; Yan, J. A Survey of Quantum Computing Hybrid Applications with Brain-Computer Interface. Cognitive Robotics 2022. [Google Scholar] [CrossRef]
- Miranda, E.R.; Martín-Guerrero, J.D.; Venkatesh, S.; Hernani-Morales, C.; Lamata, L.; Solano, E. Quantum Brain Networks: A Perspective. Electronics 2022, 11, 1528. [Google Scholar] [CrossRef]
- Miranda, E.R.; Venkatesh, S.; Martın-Guerrero, J.D.; Hernani-Morales, C.; Lamata, L.; Solano, E. An approach to interfacing the brain with quantum computers: practical steps and caveats. arXiv 2022, arXiv:2201.00817. [Google Scholar]
| 1 | The montage is depicted in the official dataset description available at https://www.bbci.de/competition/iii/desc_IIIa.pdf
|
| 2 | More details on the official dataset description available at https://www.bbci.de/competition/iii/desc_IVa.html. |
| 3 |
Figure 1.
Flow diagram obtained by following the PRISMA guidelines.
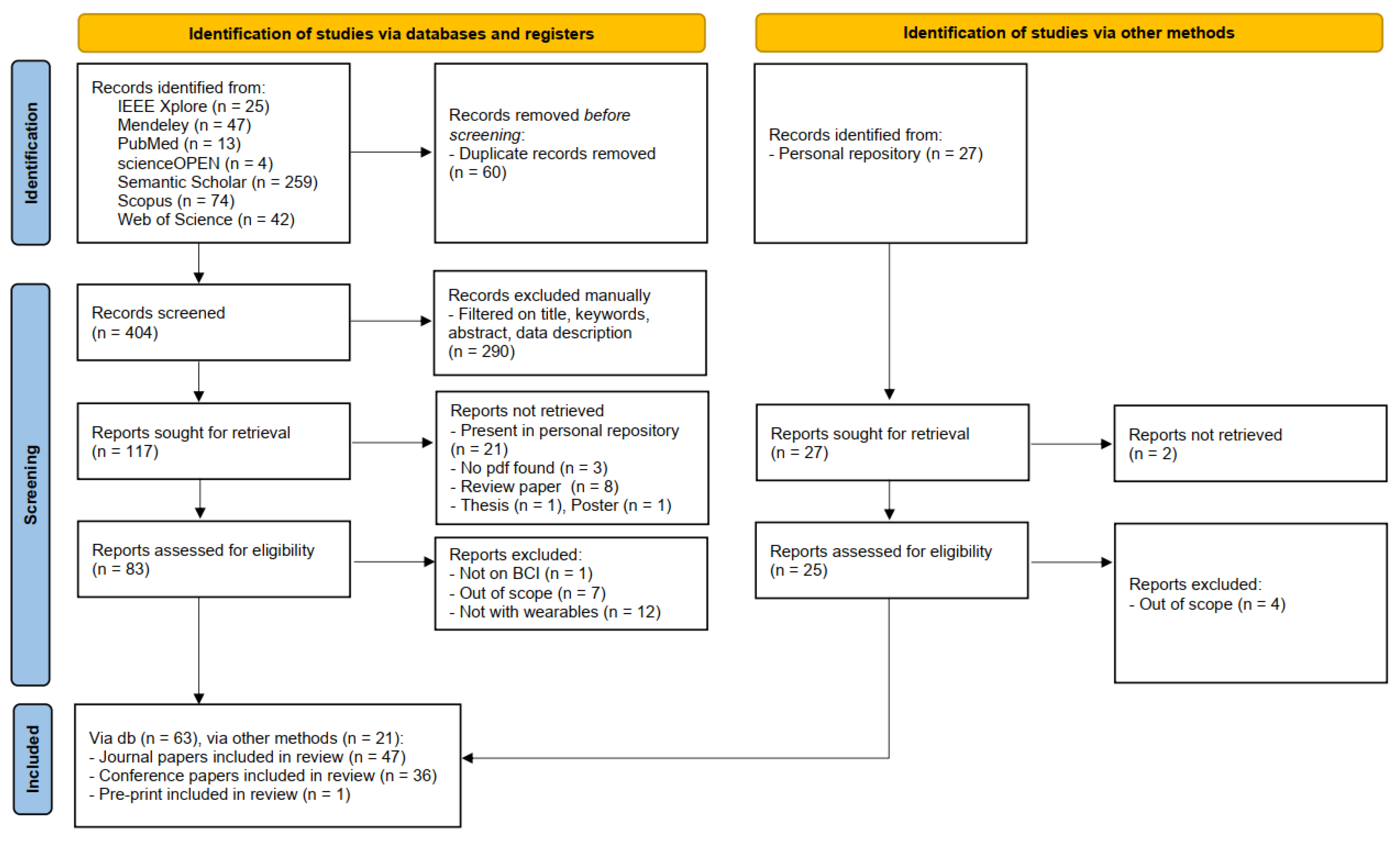
Figure 2.
Number of papers remaining after the scraping process per each considered year (January 01, 2012 - June 22, 2022).
Figure 2.
Number of papers remaining after the scraping process per each considered year (January 01, 2012 - June 22, 2022).
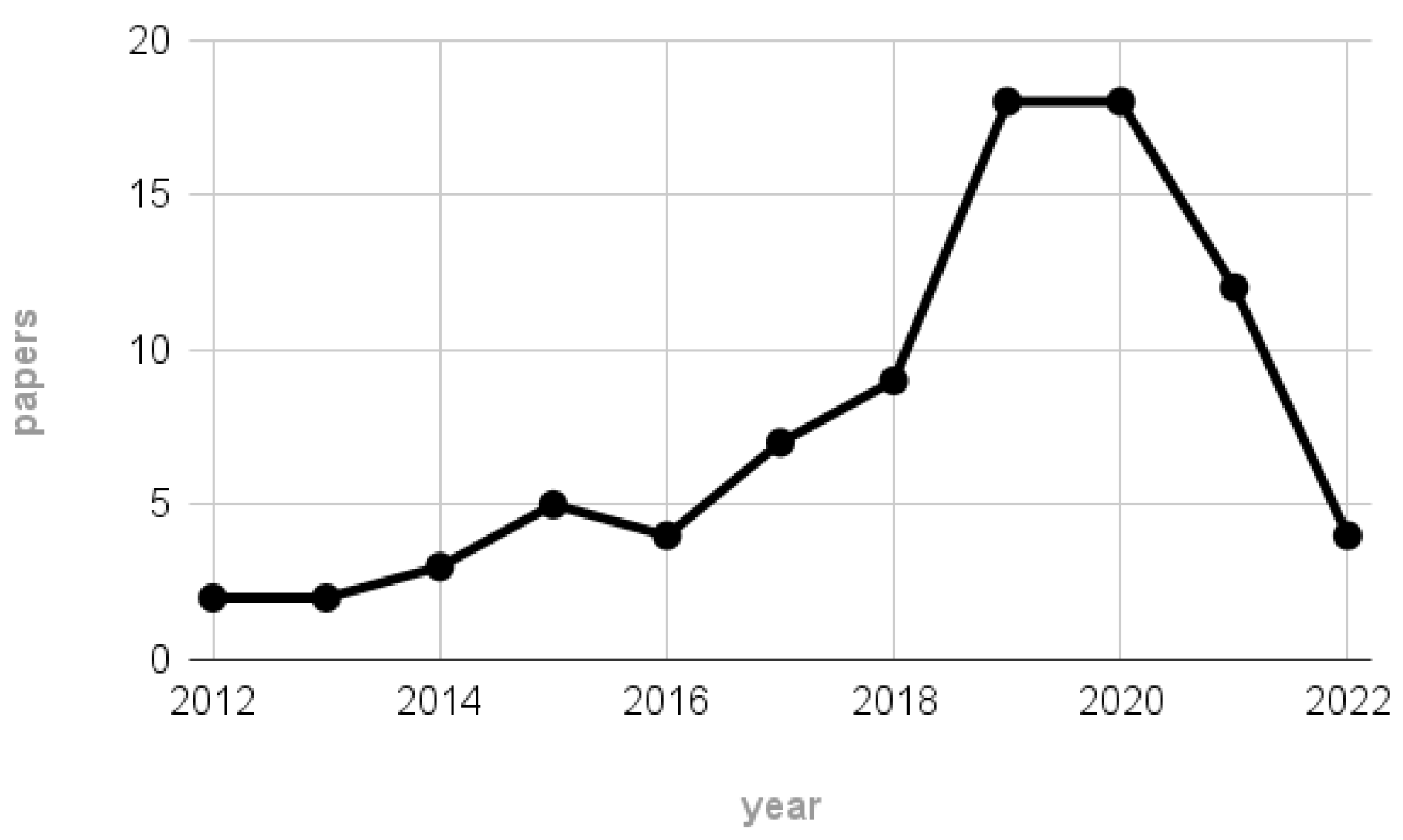
Figure 3.
Electrode placement international systems. The letter correspondences are as follows: frontopolar (Fp), AF between Fp and F, frontal (F), FC between F and C, central (C), CP between C and P, parietal (P), PO between P and O, occipital (O), temporal (T), FT between F and T, TP between T and P. Notice that the 10-20 system includes auricolar (A) electrodes, and the 10-10 system presents the nasion (Nz), inion (Iz), left and right pre-auricolar point (LPA and RPA).
Figure 3.
Electrode placement international systems. The letter correspondences are as follows: frontopolar (Fp), AF between Fp and F, frontal (F), FC between F and C, central (C), CP between C and P, parietal (P), PO between P and O, occipital (O), temporal (T), FT between F and T, TP between T and P. Notice that the 10-20 system includes auricolar (A) electrodes, and the 10-10 system presents the nasion (Nz), inion (Iz), left and right pre-auricolar point (LPA and RPA).
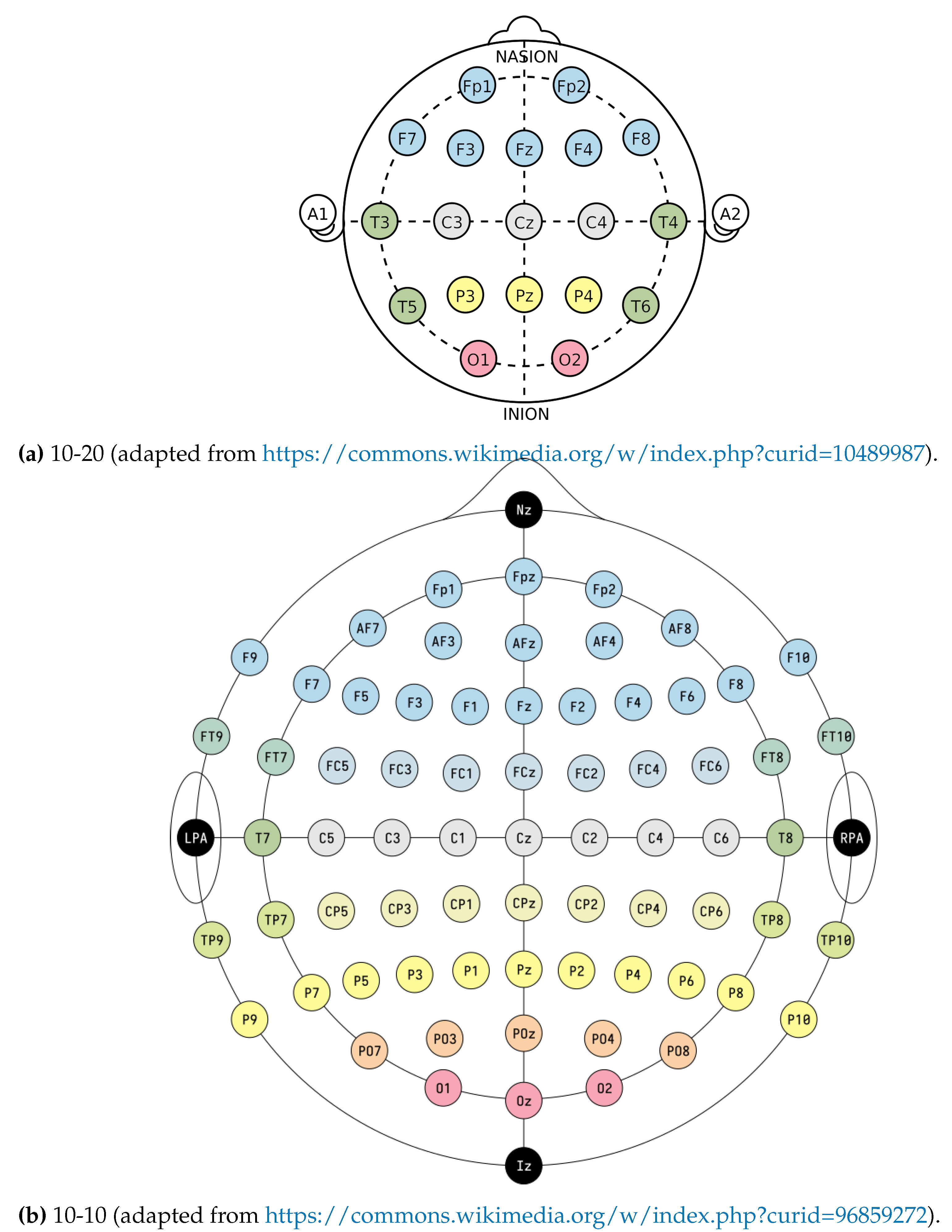
Figure 4.
BCI system standard life cycle.
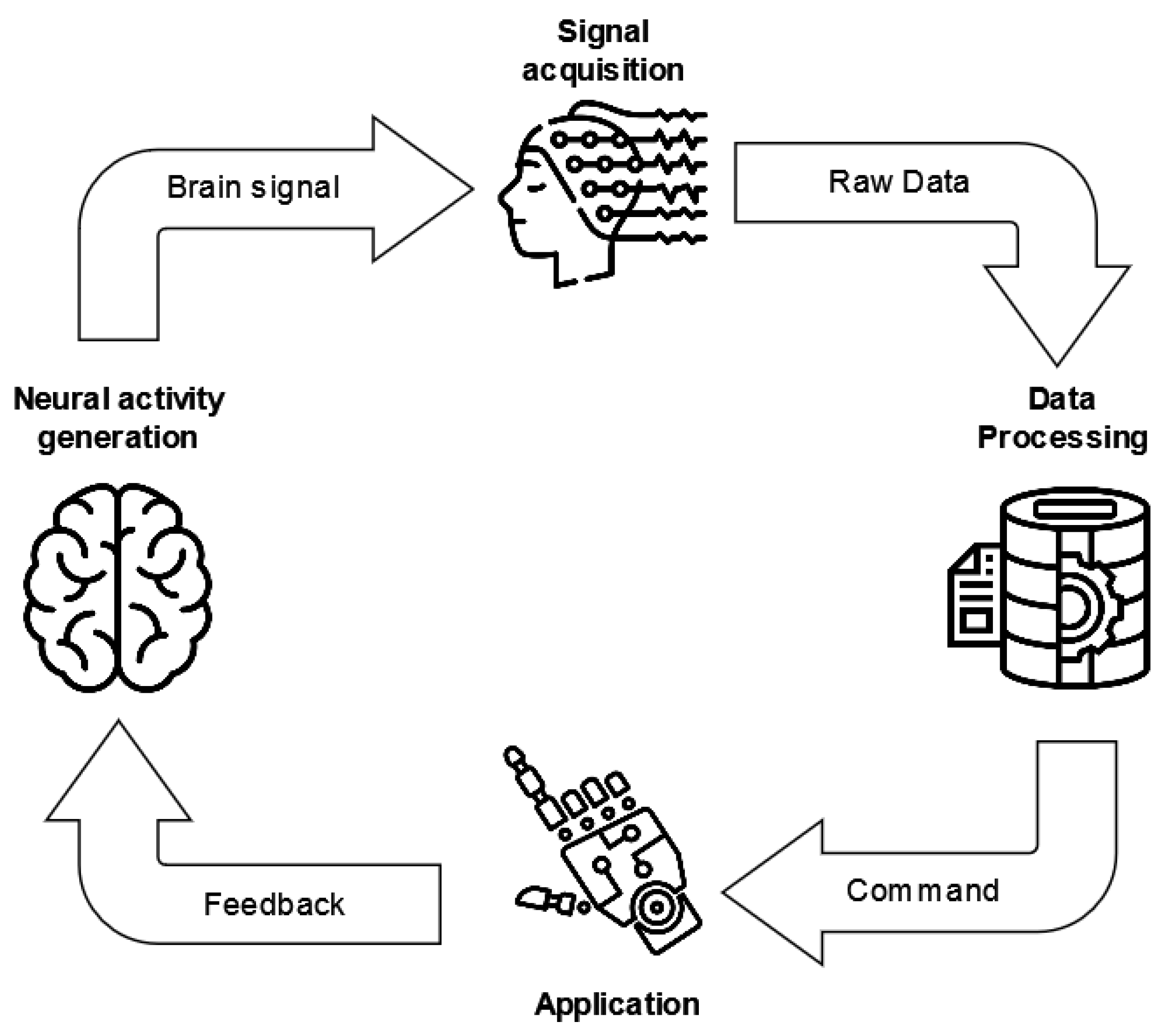
Figure 5.
Reviewed paper distribution according to different fields of applications and aims.
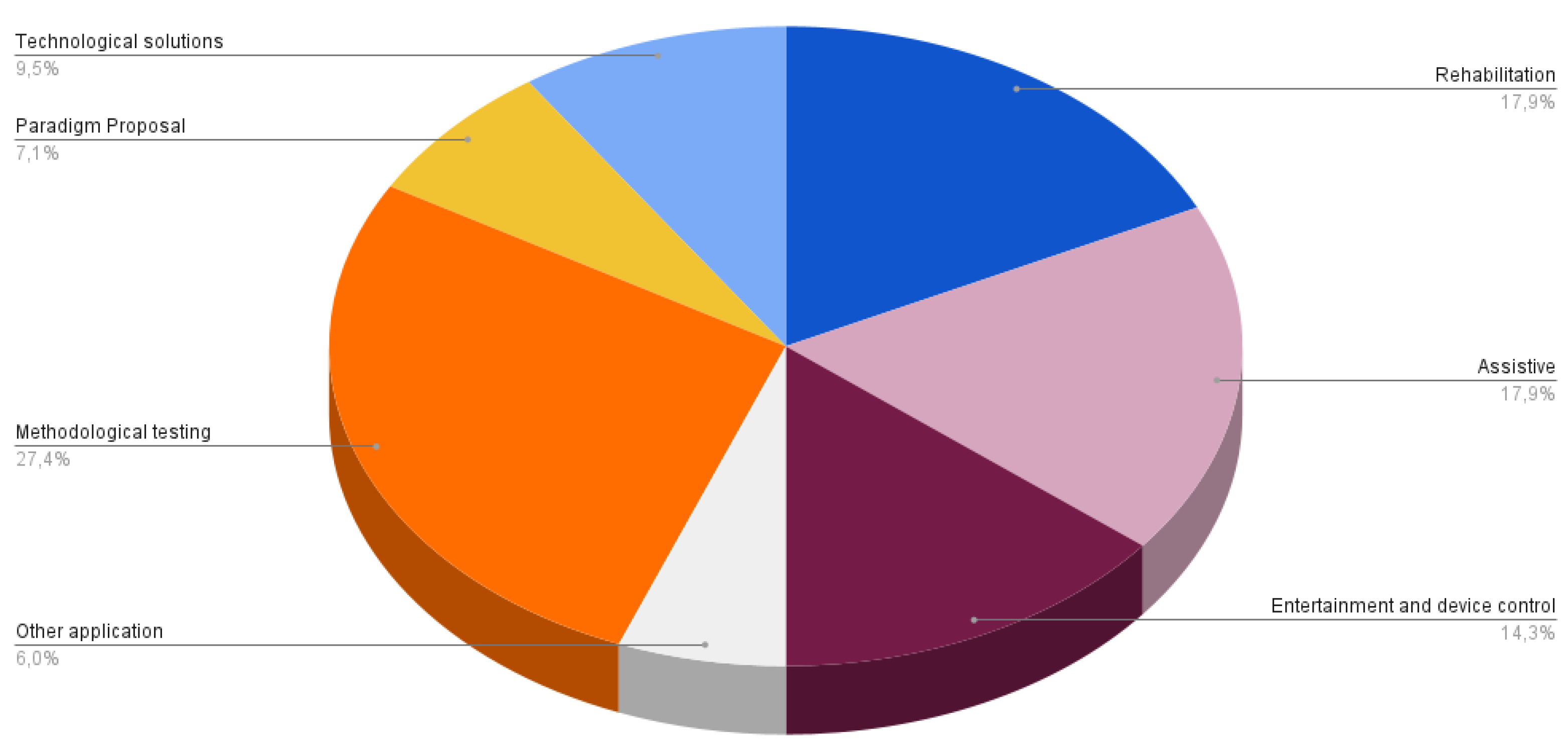
Figure 6.
Radial graphic depicting the distribution of the classification and data analysis techniques employed by the reviewed papers.
Figure 6.
Radial graphic depicting the distribution of the classification and data analysis techniques employed by the reviewed papers.
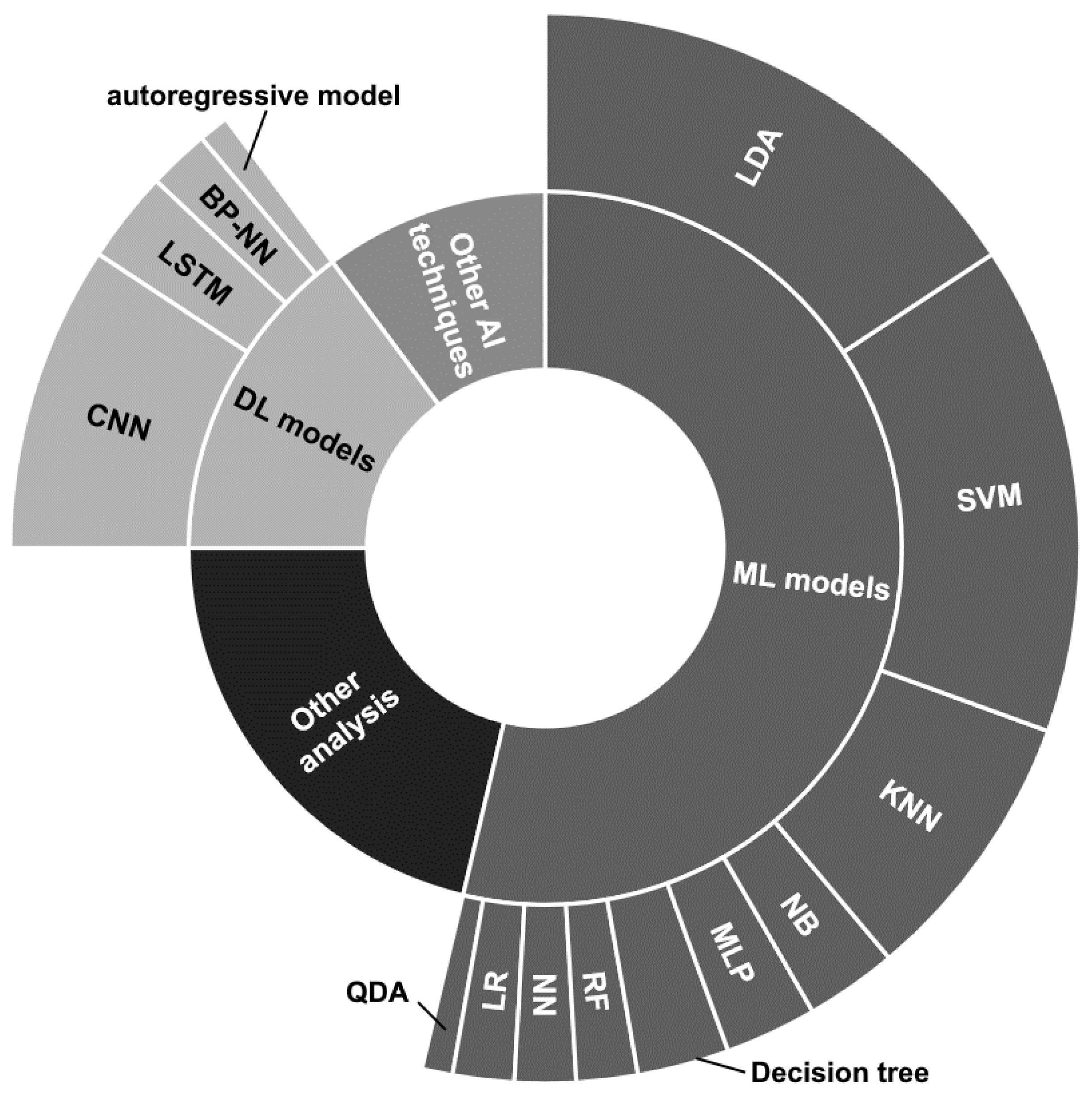
Figure 7.
Number of subjects recruited by the remaining 79 works presenting information on the matter. The first number (bold black) represents the subject number range, while the second number (bold gray) the percentage considering the total number of works. For example, the 48% of the works presenting subject information recruits a maximum of 5 participants.
Figure 7.
Number of subjects recruited by the remaining 79 works presenting information on the matter. The first number (bold black) represents the subject number range, while the second number (bold gray) the percentage considering the total number of works. For example, the 48% of the works presenting subject information recruits a maximum of 5 participants.
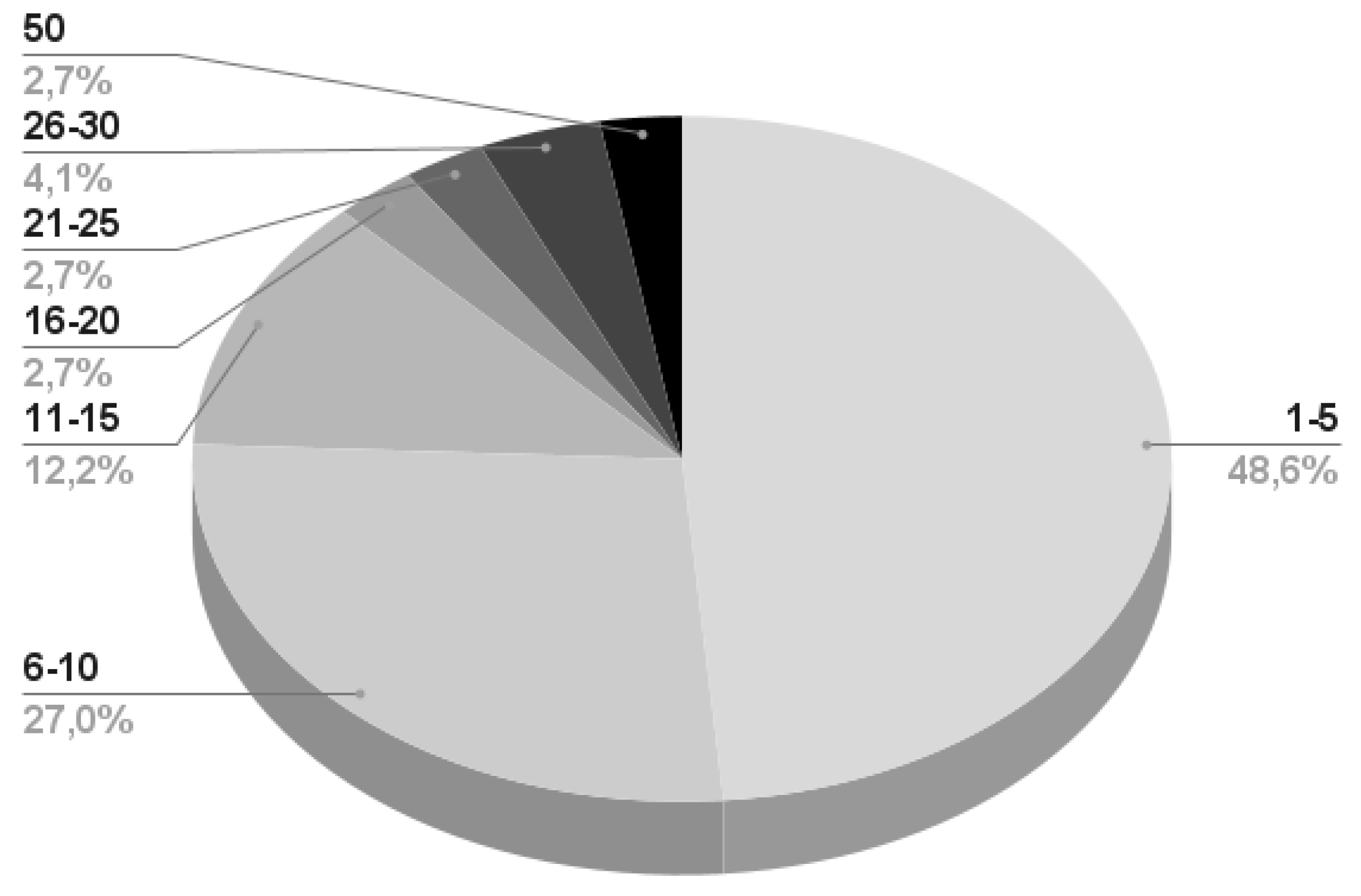
Table 1.
Search engine information summary. The author names are reported with their initials.
| Search engine | Author | Last consultation date |
|---|---|---|
| IEEE Xplore | F.G. | 2022/06/22 |
| Mendeley | F.G. | 2022/06/22 |
| PubMed | S.C. | 2022/06/22 |
| ScienceOPEN | A.S. | 2022/06/21 |
| Semantic Scholar | A.S. | 2022/06/21 |
| Scopus | A.S. | 2022/06/22 |
| Web of Science | S.C. | 2022/06/22 |
| Google Scholar | M.C. & A.S. | 2022/06/20 |
Table 2.
Summary of the searches considering keyword subsets. The fields present the search engines and the main keywords related to the considered subsets.
Table 2.
Summary of the searches considering keyword subsets. The fields present the search engines and the main keywords related to the considered subsets.
| Search engine | EEG & BCI | EEG & BCI & wearable | EEG & BCI & MI | EEG & BCI & wearable & MI |
|---|---|---|---|---|
| IEEE Xplore | 3584 | 121 | 546 | 13 |
| Mendeley | 10723 | 286 | 3118 | 60 |
| PubMed | 2777 | 57 | 877 | 14 |
| ScienceOPEN | 2659 | 22 | 303 | 4 |
| Semantic Scholar | 12200 | 1879 | 3630 | 259 |
| Scopus | 10733 | 670 | 2909 | 74 |
| Web of Science | 6564 | 180 | 2491 | 40 |
Table 3.
EEG rhythms overview.
| Rhythm | Frequency range (Hz) | Occurrence |
|---|---|---|
| ≤ 4 | infants, deep sleep | |
| 4 - 8 | emotional stress, drowsiness | |
| 8 - 13 | relaxed awake state | |
| 8 - 13 | motor cortex functionalities | |
| 13 - 30 | alert state, active thinking/attention, anxiety | |
| ≥ 31 | intensive brain activity |
Table 5.
Synthetic information on works presenting classification and other analyses, while comparing their results with benchmark datasets or their own available upon request or published datasets.
Table 5.
Synthetic information on works presenting classification and other analyses, while comparing their results with benchmark datasets or their own available upon request or published datasets.
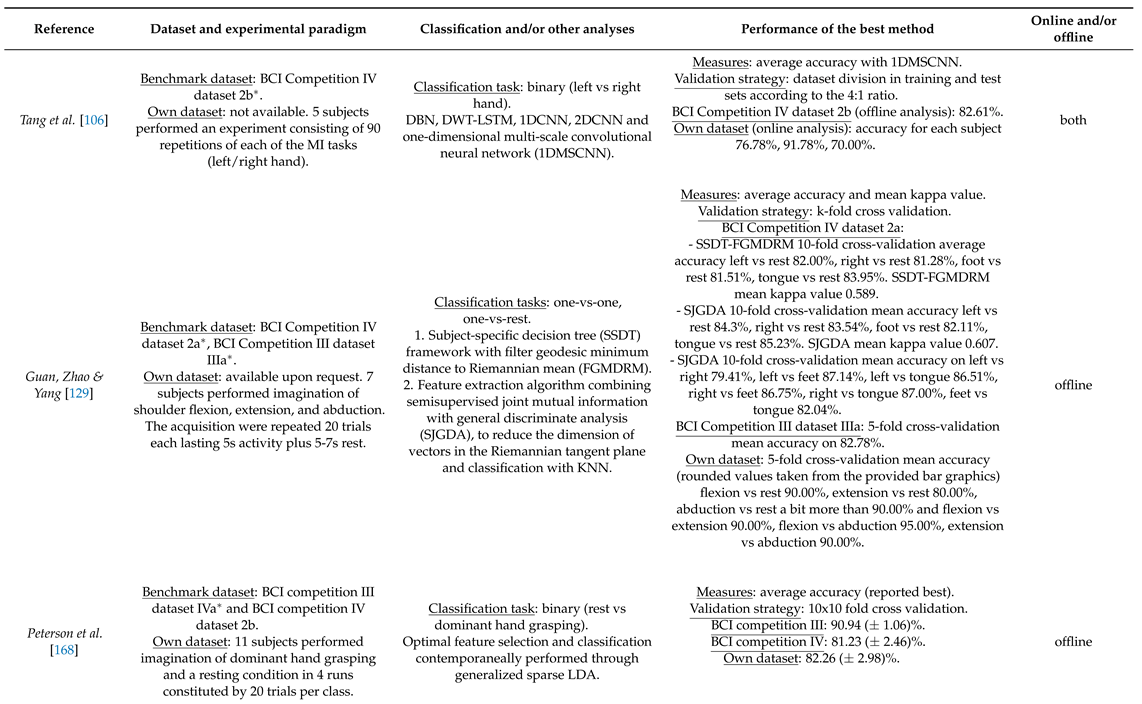 |
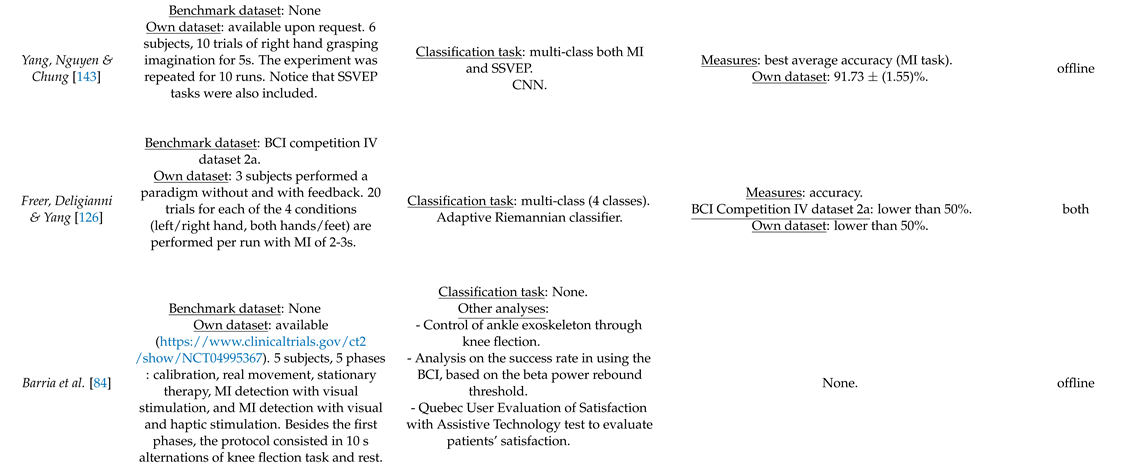 |
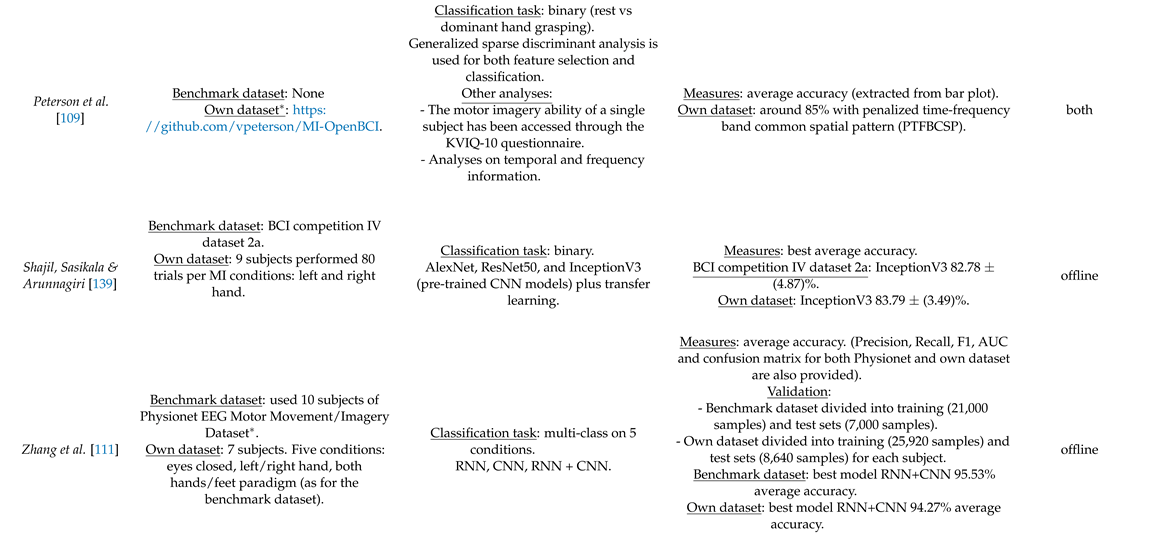 |
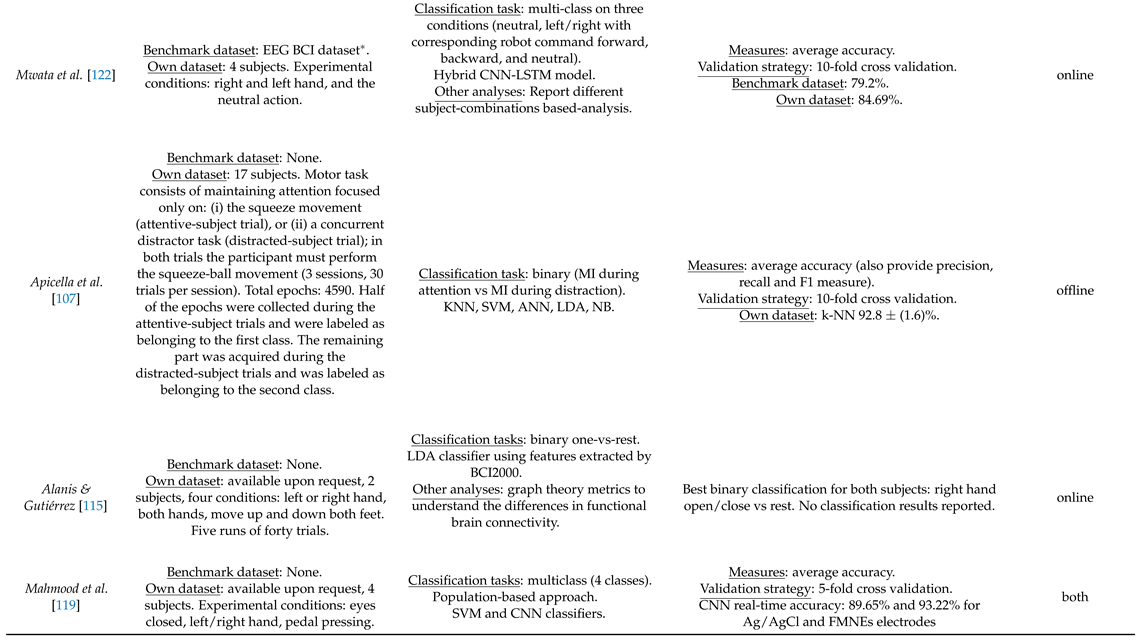 |
Table 6.
Summary of the publicly available datasets employed by some of the reviewed papers.
| Dataset | Link | Device | Experimental paradigm |
|---|---|---|---|
| BCI Competition III dataset IIIa [192] | https://www.bbci.de/competition/iii/ | Neuroscan, 64 channel EEG amplifier (wired) | cue-based left/right hand, foot, tongue MI |
| BCI Competition III dataset IVa [192] | https://www.bbci.de/competition/iii/ | BrainAmps and 128 channel ECI cap (wired) | cue-based left/right hand, right foot MI |
| BCI Competition IV dataset 2a [193] | https://www.bbci.de/competition/iv/ | 22 electrodes (wired) | cue-based MI-BCI left/right hand, both feet, tongue MI |
| BCI Competition IV dataset 2b [193] | https://www.bbci.de/competition/iv/ | 3 electrodes (wired) | cue-based MI-BCI left/right hand MI |
| EEG Motor Movement/Imagery Dataset [42,194] | https://physionet.org/content/eegmmidb/1.0.0/ | 64 electrodes (wired) | cue-based motor execution/imagination left/right fist and both feet/fists opening/closing |
| MI-OpenBCI [109] | https://github.com/vpeterson/MI-OpenBCI | OpenBCI Cyton and Daisy Module, Electrocap System II, 15 electrodes (wearable) | cue-based dominant hand grasping MI |
| EEG BCI dataset [195] | https://figshare.com/collections/A_large_electroencephalographic_motor_imagery_dataset_for_electroencephalographic_brain_computer_interfaces/3917698 | EEG-1200 JE-921A EEG system, 19 electrodes (wired) | left/right hand, left/right leg, tongue and finger MI |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



