
Submitted:
06 February 2023
Posted:
13 February 2023
You are already at the latest version
Abstract
A new set of basis functions is presented. The foundation in mathematics is established. To reconstruct a signal, it is compared to the Fourier basis functions. The M-basis functions' potential applications are also presented.
Keywords:
M-basis function
; Fourier basis function
; optimization
; minimum jerk
1. Introducing M-basis functions
The M-basis functions of the nth-order are defined as the arguments for optimizing the following objective function:

Subject to knowing the boundary conditions, i.e., the values of θ and up to the (n-1)th derivative of θ at t = 0 and t = tf, we will show that the solution to (1) is a linear combination of 2n basis functions that we call M-basis functions. First, the third-order (n = 3) is discussed because (1) results in minimum jerk patterns [1,2,3,4,5,6,7,8,9,10,11,12,13,14,15,16].
1.1. The third-order M-basis functions (minimum jerk)
As shown in [2], the solution of this problem is a quintic spline, or 5th-order polynomial, which can be described as (2).
 where, t is the time variable, and A and X are the following vectors.
where, t is the time variable, and A and X are the following vectors.


A vector defined by (5) shows the boundary conditions at the initial (t = 0) and final (t = tf) moments.
 where, tf represents the total time duration, B describes the boundary conditions, and the dot on top of θ indicates the first derivative of θ with respect to time. We can change (5) to (6) using (2).
where, tf represents the total time duration, B describes the boundary conditions, and the dot on top of θ indicates the first derivative of θ with respect to time. We can change (5) to (6) using (2).

We can write (7) using (2) and (6).

Using (3) and (7), we can write (8).
It is possible to convert (9) to (10).
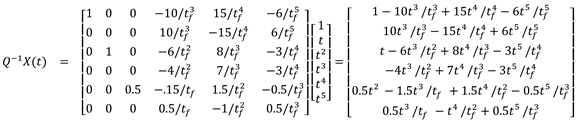
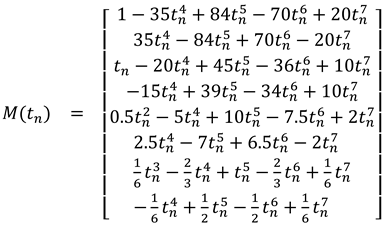
 where, T and M are defined as follows:
where, T and M are defined as follows:

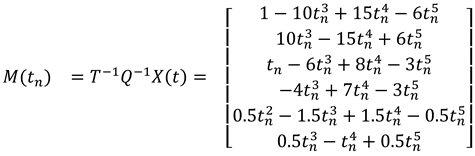 where, tn is the normalized time variable, i.e., tn = t/tf. Each row of the M describes one of the M-basis functions. The M-basis functions are normalized in terms of time and can be calculated simply by using (12). Third-order M-basis functions are illustrated in Figure 1.
where, tn is the normalized time variable, i.e., tn = t/tf. Each row of the M describes one of the M-basis functions. The M-basis functions are normalized in terms of time and can be calculated simply by using (12). Third-order M-basis functions are illustrated in Figure 1.
Finally, we can write (13) from (5), (11), and (12).

Equation (13) shows that the solution of (1) is a linear combination of the M-basis functions scaled by the time duration (T) and boundary conditions (B).
1.2. The nth-order M-basis functions
Similar to [2], it is easy to prove that the solution to (1) is a (2n-1)th-order polynomial. Therefore, inspired by what is written above, it is possible to show that the solution of (1) can be described simply by (13) for any order of n.
In this case, X, B, T, and M are as follows:



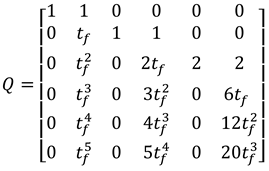
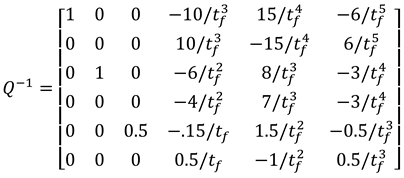
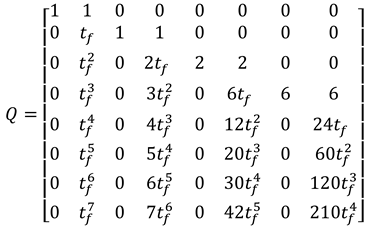
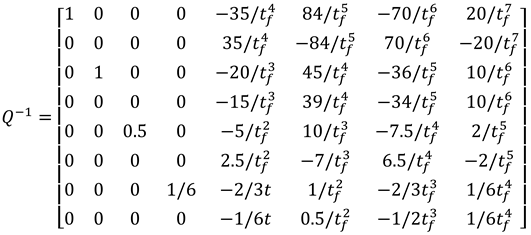
It should be mentioned that the Q matrix can be created using (18).

Finally, having makes it easy to calculate M using (19).

Finally, θ can be calculated using (13) with the help of (15), (16), and (17).
1.3. The 4th-order M-basis (minimum snap)
In this case, X, B, T, and M are as follows:



The and can be written as (23) and (24) respectively.
Finally, using (20), (22), and (24) as shown below, the M-basis functions can be derived from (19).
 where, tn is the normalized time variable, i.e., tn = t/tf. In the end, similarly, θ can be computed by (13) using (21), (22), and (25). Each row of the M describes one of the fourth-order M-basis functions. The M-basis functions from the first to seventh-order are illustrated in Figure 2. The application of the third-order M-basis functions has already been investigated in human movement [1,3,4,5,6,7,8].
where, tn is the normalized time variable, i.e., tn = t/tf. In the end, similarly, θ can be computed by (13) using (21), (22), and (25). Each row of the M describes one of the fourth-order M-basis functions. The M-basis functions from the first to seventh-order are illustrated in Figure 2. The application of the third-order M-basis functions has already been investigated in human movement [1,3,4,5,6,7,8].
2. The frequency specification of the M-basis functions
According to the definition of the objective function, i.e., equation (1), it can be imagined that the M-basis functions are the low-frequency signals. Considering tf = 1 sec, the Fourier transforms of the M-basis functions from the first to seventh orders are calculated. It should be added that the two M-basis functions shown in the same window in Figure 2 have the same absolute Fourier transforms. The cutoff frequencies of the M-basis functions for various orders are depicted in Figure 3.
It should be mentioned that the shorter the tf, the higher the cutoff frequency, and vice versa. It is proportional to the length of time, so the cutoff frequency for a tf of 0.5 sec is twice that of 1 sec. It means that for the shorter time length, the bandwidth of the M-basis functions is higher. The bandwidth of the M-basis functions, on the other hand, is lower for longer time lengths due to their low-frequency nature.
3. The applications of the M-basis function
3.1. Human movements
3.2. Slow signals
With almost the same number of basis functions, the error of reconstructing a signal using the Fourier basis functions and the M-basis functions is compared. The original signal (Y) is created with a duration of 1 sec and a sampling frequency of 100 Hz. The results show that a signal with low-frequency information can be represented better by a linear combination of M-basis functions than by Fourier-based functions. Different examples are depicted in Table 1 to show the performance of M-basis functions compared to the Fourier transform. Because the signal has a time length of one second and the resolution of the Fourier basis functions is 1 Hz, the Fourier basis function produces better results for pure sinusoidal signals with integer frequency. For the non-integer frequencies, the Fourier basis functions are not efficient to reconstruct the original signal; however, the M-basis functions can reconstruct these kinds of signals with a limited number of basis functions. For signals with a wider frequency range, the order of the M-basis functions should obviously be higher to reconstruct the signal at higher frequencies, as seen in Fig. 3.
4. Discussion and conclusion
In this article, I introduced novel M-basis functions. As shown in different examples, representing a signal by M-basis functions can preserve the frequency nature of the signal, especially if the time window is short.
As the future work, the combination of the Fourier and M-basis functions can be studied. The M-basis functions can better represent the boundary of the signal than the middle of the signal, while the Fourier basis functions can better represent the middle of the signal because of the Gibbs effect. The M-basis functions can also be applied to estimate the frequency of the single frequency signals with non-integer value.
References
- Emadi Andani, M.; Bahrami, F. COMAP: A new computational interpretation of human movement planning level based on coordinated minimum angle jerk policies and six universal movement elements. Hum. Mov. Sci. 2012, 31, 1037–1055. [Google Scholar] [CrossRef] [PubMed]
- http://www.shadmehrlab.org/book/minimum_jerk/minimumjerk.
- Sadeghi, M.; Emadi Andani, M.; Parnianpour, M.; Fattah, A. A bio-inspired modular hierarchical structure to plan the sit-to-stand transfer under varying environmental conditions. Neurocomputing 2013, 118, 311–321. [Google Scholar] [CrossRef]
- Sadeghi, M.; Emadi Andani, M.; Bahrami, F. Trajectory of human movement during sit to stand: a new modeling approach based on movement decomposition and multi-phase cost function. Exp Brain Res 2013, 229, 221–234. [Google Scholar] [CrossRef] [PubMed]
- Emadi, M.; Bahrami, F.; Yazdanpanah, M.J.; Patla, A. , "Movement prediction using an MLP without internal feedback," 2004 IEEE International Conference on Systems, Man and Cybernetics (IEEE Cat. No.04CH37583), The Hague, Netherlands 2004, 6, 5975–5979. [Google Scholar] [CrossRef]
- Sadeghi, M.; Emadi Andani, M.; Parnianpour, M.; Fattah, A. A bio-inspired modular hierarchical structure to plan the sit-to-stand transfer under varying environmental conditions. Neurocomputing 2013, 118, 311–321. [Google Scholar] [CrossRef]
- KhazeniFard, A.; Bahrami, F.; Andani, M.E.; Ahmadabadi, M.N. , "An energy efficient gait trajectory planning algorithm for a seven linked biped robot using movement elements," 2015 23rd Iranian Conference on Electrical Engineering, Tehran, Iran, 2015, pp. 1006. [Google Scholar] [CrossRef]
- Fligge, N.; McIntyre, J.; van der Smagt, P. , "Minimum jerk for human catching movements in 3D," 2012 4th IEEE RAS & EMBS International Conference on Biomedical Robotics and Biomechatronics (BioRob), Rome, Italy, 2012, pp. [CrossRef]
- Wang, C.; Peng, L.; Hou, Z.G.; Luo, L.; Chen, S.; Wang, W. (2018). Experimental Validation of Minimum-Jerk Principle in Physical Human-Robot Interaction. In: Cheng, L., Leung, A., Ozawa, S. (eds) Neural Information Processing. ICONIP, 1130. [Google Scholar] [CrossRef]
- Slupinski, L.; de Lussanet, M.H.E.; Wagner, H. Analyzing the kinematics of hand movements in catching tasks—An online correction analysis of movement toward the target’s trajectory. Behav Res 2018, 50, 2316–2324. [Google Scholar] [CrossRef]
- Asker, A.; Assal, S.F.M. . A Systematic approach for designing a multi-function sit-to-stand mobility assistive device based on performance optimization. Adv. Robot. 2019, 33, 90–105. [Google Scholar] [CrossRef]
- Asker, A.; Assal SF, M.; Ding, M.; Takamatsu, J.; Ogasawara, T.; Mohamed, A.M. Modeling of natural sit-to-stand movement based on minimum jerk criterion for natural-like assistance and rehabilitation. Adv. Robot. 2017, 31, 901–917. [Google Scholar] [CrossRef]
- Moullet, E.; Roby-Brami, A.; Guigon, E. What is the nature of motor adaptation to dynamic perturbations? PLOS Comput. Biol. 2022, 18, e1010470. [Google Scholar] [CrossRef]
- Bayle, N.; Lempereur, M.; Hutin, E.; Motavasseli, D.; Remy-Neris, O.; Gracies, J.M.; Cornec, G. Comparison of Various Smoothness Metrics for Upper Limb Movements in Middle-Aged Healthy Subjects. Sensors 2023, 23, 1158. [Google Scholar] [CrossRef] [PubMed]
- Albert, S.T.; Hadjiosif, A.M.; Jang, J.; Zimnik, A.J.; Soteropoulos, D.S.; Baker, S.N.; Churchland, M.M.; Krakauer, J.W.; Shadmehr, R. Postural control of arm and fingers through integration of movement commands eLife 2020, 9, e52507. [CrossRef] [PubMed]
- Emadi Andani, M. Human movements are shaped by utilizing sensory information: a stochastic optimum model. Preprint 2023, 2023020073. [Google Scholar] [CrossRef]
Figure 1.
The third-order M-basis functions. Six 3rd-order M-basis functions are illustrated, two in each plot. The third-order M-basis functions are movement elements as derived in [1].
Figure 1.
The third-order M-basis functions. Six 3rd-order M-basis functions are illustrated, two in each plot. The third-order M-basis functions are movement elements as derived in [1].
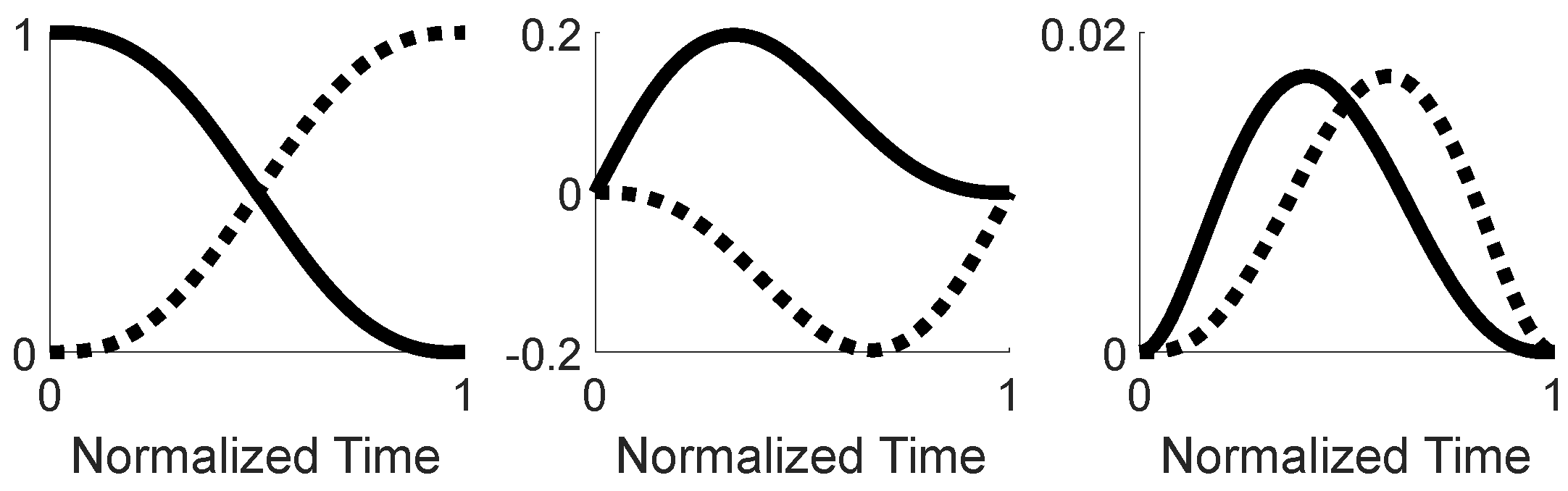
Figure 2.
The M-basis functions. The first to seventh rows represent the first to seventh-order M-basis functions, respectively. The horizontal axis is the normalized time. In each window, two M-basis functions are illustrated by solid and dashed lines.
Figure 2.
The M-basis functions. The first to seventh rows represent the first to seventh-order M-basis functions, respectively. The horizontal axis is the normalized time. In each window, two M-basis functions are illustrated by solid and dashed lines.
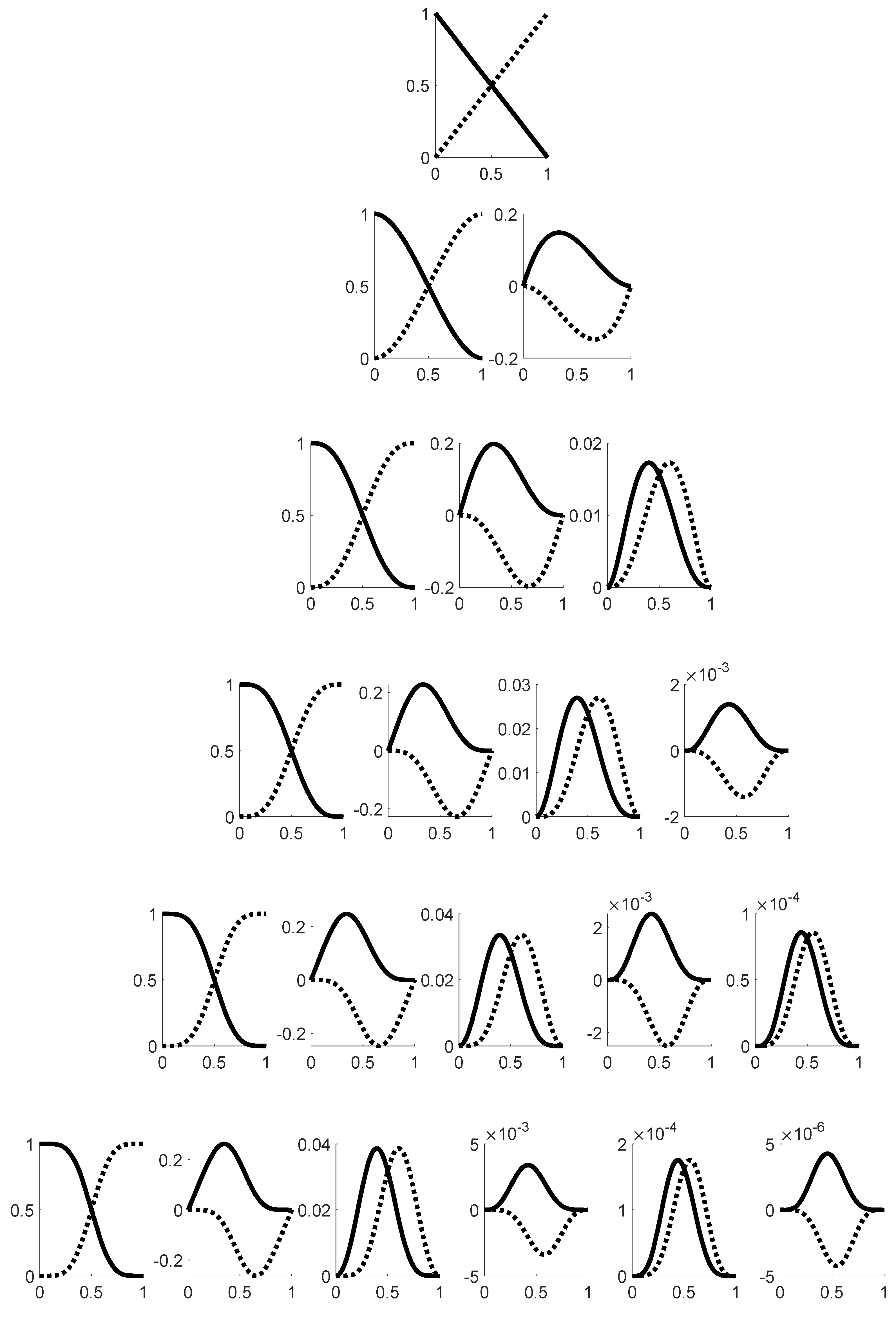
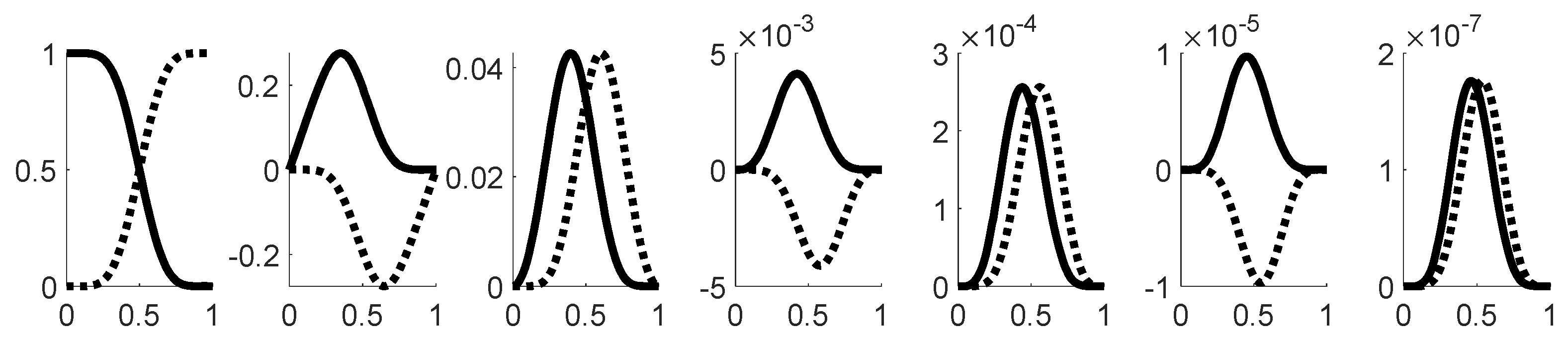
Figure 3.
The cutoff frequency. Black circles represent the first- to seventh-order M-basis functions’ cutoff frequencies. For the first-order, there are two M-basis functions with the same absolute Fourier transform and therefore the same cutoff frequency. Similarly, there are n cutoff frequencies for the nth-order M-basis functions. The lowest and highest values of the cutoff frequencies are highlighted by blue and red lines, respectively.
Figure 3.
The cutoff frequency. Black circles represent the first- to seventh-order M-basis functions’ cutoff frequencies. For the first-order, there are two M-basis functions with the same absolute Fourier transform and therefore the same cutoff frequency. Similarly, there are n cutoff frequencies for the nth-order M-basis functions. The lowest and highest values of the cutoff frequencies are highlighted by blue and red lines, respectively.
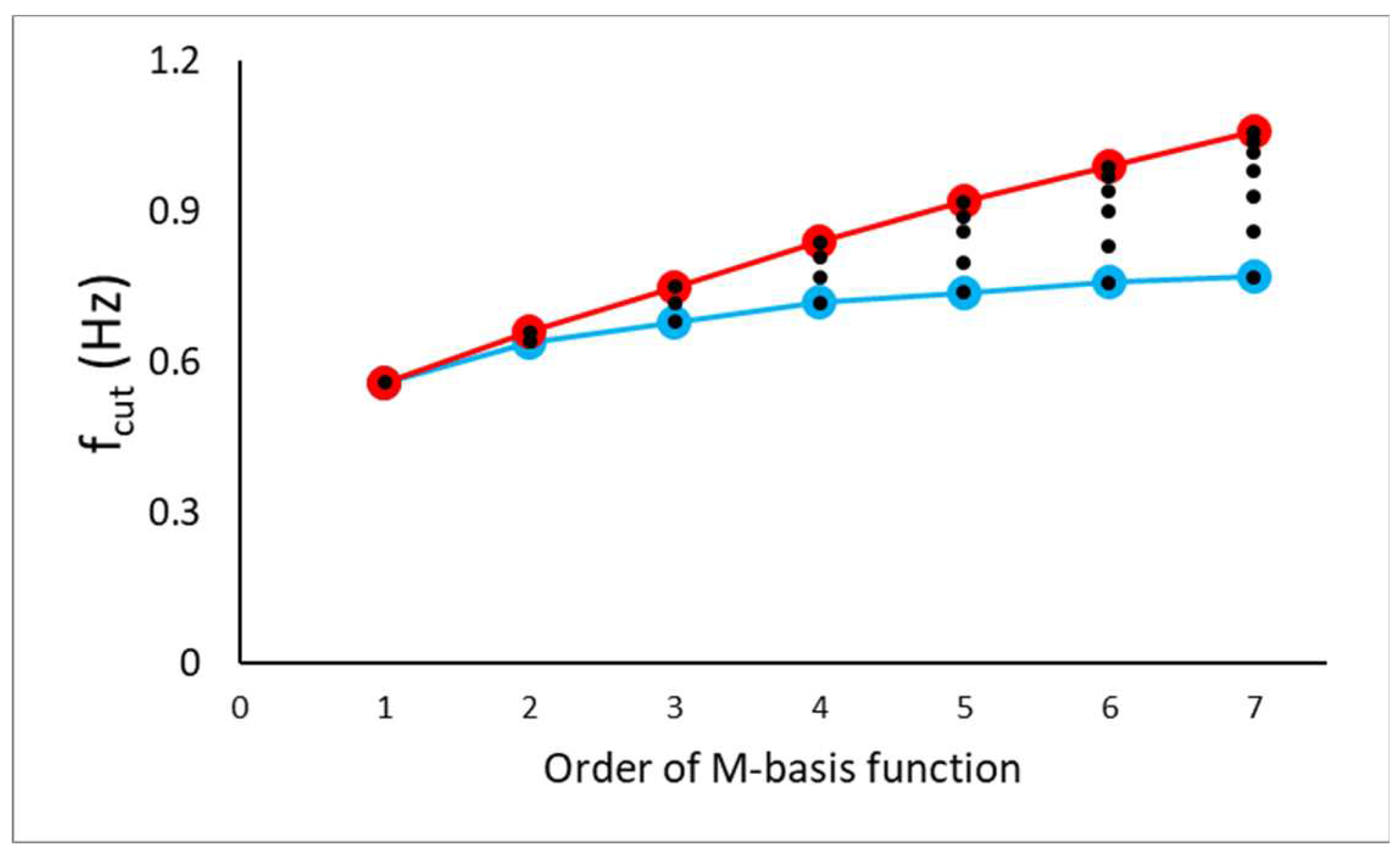

Table 1.
The number of basis functions of the Fourier and M transforms needed to reconstruct the signal with a maximum error of 5% is depicted in different cases. Different cases were considered as examples to show the effect of the integer and non-integer values of frequency. The duration of the signal is set at 1 sec (tf = 1 sec), and the sampling frequency is set at 100 Hz. Since the duration of the signal is 1 sec, the resolution of the Fourier transform is 1 Hz. That is why, in these cases, the number of Fourier basis functions will be increased to compensate for the lack of frequency resolution. The variability in the number of basis functions in the Fourier transform is huge; instead, it is more robust in the M transform. For the signals including non-integer frequencies, the results of M-basis functions are much better, i.e., it needs a much smaller number of basis functions to represent the original data with less than 5% error. In those cases, even with more than 51 of the Fourier basis functions, the represented data had more than 15% error.
Table 1.
The number of basis functions of the Fourier and M transforms needed to reconstruct the signal with a maximum error of 5% is depicted in different cases. Different cases were considered as examples to show the effect of the integer and non-integer values of frequency. The duration of the signal is set at 1 sec (tf = 1 sec), and the sampling frequency is set at 100 Hz. Since the duration of the signal is 1 sec, the resolution of the Fourier transform is 1 Hz. That is why, in these cases, the number of Fourier basis functions will be increased to compensate for the lack of frequency resolution. The variability in the number of basis functions in the Fourier transform is huge; instead, it is more robust in the M transform. For the signals including non-integer frequencies, the results of M-basis functions are much better, i.e., it needs a much smaller number of basis functions to represent the original data with less than 5% error. In those cases, even with more than 51 of the Fourier basis functions, the represented data had more than 15% error.
| Original signal | The number of basis functions needed to reconstruct the original signal with an error rate under 5% | |
| Fourier-basis | M-basis | |
| cos(2π×t) | 3 | 8 |
| sin(2π×t) | 3 | 8 |
| cos(2π×2t) | 5 | 14 |
| sin(2π×2t) | 5 | 14 |
| sin(2π×t) + sin(2π×2t) | 5 | 14 |
| 2sin(2π×t) + sin(2π×2t) | 5 | 14 |
| cos(2π×0.5t) | >51 | 4 |
| cos(2π×0.53t) | >51 | 6 |
| cos(2π ×0.53t - π/8) | >51 | 6 |
| cos(2π×1.38t) | >51 | 12 |
| cos(2π×1.38t + π/12) | >51 | 12 |
| cos(2π×1.38t + π/12) + cos(2π ×0.53t - π/8) | >51 | 10 |
| cos(2π×1.38t + π/12) + cos(2π ×0.53t - π/8) + cos(2π ×0.17t + π/3) | >51 | 10 |
| sin(2π ×t) + cos(2π×1.38t + π/12) + cos(2π ×0.53t - π/8) + cos(2π ×0.17t + π/3) | >51 | 10 |
| sin(2π ×t) + sin(2π ×2t) + cos(2π×1.38t + π/12) + cos(2π ×0.53t - π/8) + cos(2π ×0.17t + π/3) |
>51 | 14 |
| cos(2π×2.5t) | >51 | 18 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



