
Submitted:
19 April 2023
Posted:
19 April 2023
You are already at the latest version
Abstract
Mobile robots can perform tasks on the move, including exploring terrain, discovering landmark features or moving a load from one place to another. This group of robots is characterized by a certain level of intelligence allowing making decisions and responding to stimuli received from the environment. As part of Industry 5.0, such mobile robots and humans are expected to co-exist and work together in a shared environment to make human work less tiring, quicker, and safer. This can only be realized when clean, dense, and economical energy sources are available. The aim of the study is to analyze the state of the art and to identify the most important directions for future developments in robotic power systems based mainly on batteries. The efficiency and performance of the battery depends on the design using different materials. Work environments and performance requirements are considered in this systematic review to classify solutions that help developers choose the best suited power system for specific application. Indirectly, the aim of the work is to generate discussion within the scientific and engineering community. A narrative review of publications from six major bibliographic databases according to preset inclusion criteria was combined with a critical analysis of current and future technologies. The main findings of the review allow answering question what is the role of modern power source technologies, artificial intelligence and ground-breaking research work in global policies related to energy saving, green policies, and sustainable development. The main opportunities and threats are discussed, and a brief feasibility analysis is carried out. Novelty of the article relates not only to the analysis of technologies, but also to approaches and their use under conditions of limited resource availability, when resource usage must be minimized. The article provides an overview of batteries, their specifications, classifications, and their advantages and disadvantages. In addition, we propose: (1) an algorithm for selecting main energy source for robot application, and (2) an algorithm for selecting electrical system power supply. Current mobile robot batteries are, in most cases, their biggest limitation. Progress in batteries development is too slow to catch up with the demand for robot autonomy and range requirements, limiting the development of mobile robots. Further intensive research and implementation work is needed to avoid years of delay in this area.
Keywords:
mobile robots
; power supply
; battery systems
; materials of batteries
; power artificial intelligence
; medical applications
; UGV
1. Introduction
Mobile robots can perform specific tasks on the move, including exploring terrain and its features or moving a load from one place to another [1]. This group of robots is characterized by a certain level of intelligence to make decisions, including responding to stimuli received from the environment [2]. As part of Industry 5.0, such mobile robots and humans are expected to co-exist and work together in a single environment to make human work easier, faster, less tiring, and safer [3]. This can only be realized when clean and economical energy sources are provided to ensure:
- long operating times,
- high productivity,
- extension of cognitive functions that are required to properly interpret human intent and therefore take expected actions,
- autonomy in terms of long operating time without recharging,
- accuracy of operation that is a result of additional sensing elements, whatever the operating conditions might be,
- meeting environmental requirements to the extent that they can be used in various fields and working environments (e.g., underwater) without risk of environmental pollution [1].
Currently, the achievement of the required characteristics is limited by high initial costs, the requirement to recharge batteries or refill combustible fuels, which significantly reduces the cost-effectiveness of their use, maintenance-free operation and shortens their useful operating time [1]. Inclusion of additional control functions leads to significant demand for computing power, and that in turn can change the balance between mechanical and control system energy consumption that must be considered.
Power system selection is limited by multiple constraints covering both system design, as well as energy storage properties. In this review we summarize available energy sources and their characteristics, present guidelines for selection of the energy source and storage components based on specific system requirements.
The rationale for the high scientific and practical importance of this topic is as follows: the power source of a mobile robot is one of the key components that determine robot’s performance, operation time, and significantly contributes to the overall weight and price. As a power source we consider every possible source of energy, that can be utilized by a robot to perform mechanical work, including energy storages that can be introduced as a secondary power sources or regenerative intermediate storage systems [4]. Energy storage systems are highly dependent on the size of the robot and intended use environment. It is therefore important to have a clear overview of what is available, and in which application specific storage can reach its maximum efficiency [5].
Current trends in robot applications – state of the art and perspectives – can be described very shortly: it is difficult for mobile robots to reach human or animal performance due to the lack of motors and gears that effectively match power per unit of muscles. To match the agility of an animal new actuators and materials are required, including those that change dimensions in response to applied voltage (electroshapable materials), and new power technologies [7,8,9,10,11]. Such robots should outperform humans and animals in at least one task or provide a cheaper alternative to their work to become attractive alternative.
Control systems of all modern robots rely on electronics. This implies the need for electrical energy sources in every design. Depending on the control problem complexity power source needs to be sized accordingly. The largest energy consumption in robots is related to the locomotion and manipulatory functions. Therefore, energy conversion from the primary movers' power source to the electric power source fulfilling control system’s requirement is often employed. In the case of combustion engines or other mechanical power sources, generators can be used to power control electronics, or secondary battery-based systems can be used to get separation of motor and control systems powers. For electric power sources DC-DC converters are employed together with filtering circuitry to adjust (usually step-down) voltage to the control system’s requirements.
Autonomy of mobile robots dispenses with the intervention of human operators, is economical and safe, but requires the use of path planning algorithms for selecting the optimal way to move. A global classification of path planning algorithms is introduced in the article by Sanchez et al. for both autonomous ground vehicles and autonomous boats [8].
Purpose of the work and its significance: up to date summary of energy sources that can be used in robots, categorization of those sources, and algorithmic decision process aid for mobile robot application.
Research gaps and shortages: the widespread use of mobile robots is still limited due to the lack of efficient power systems [1]. Identified research gaps concern variety of clinical applications, sport, ergonomics and industry, goods distribution, as far as service robotics, and associated power requirements. Fulfillment of the total requirements will be ensured in the future by novel power sources, artificial intelligence, autonomous driving, network communication, robot-robot and robot-human collaboration, user-friendly and safe human-robot interfaces, expression and perception of emotions (within the framework of affective computing), and in some cases even nanorobotics [2].
The novelty of the proposed approach: there are very few comprehensive reviews of existing and future mobile robot power systems (including those based on breakthrough technologies and renewable energy sources), the use of which must increase in areas critical to the normal functioning of economies and societies, i.e., Agriculture 4.0 or mHealth. Reconciling the demands of industry, agriculture or home healthcare with the structures imposed by sustainability in a crisis economy will not be a simple task and may arguably require coordinated efforts at international level. Hence, the novelty of the article relates not only to the analysis of technologies, but also to approaches to their use under conditions of limited resource availability, which must be flexible and optimized on an ongoing basis. The article provides an overview of batteries design using different materials and their advantages and disadvantages, as well as a diagram for choosing the right power source depending on the application. Thus, it may turn out that solutions that were optimal until recently are no longer so, and groups of parameters hitherto considered crucial may be downgraded in a compromise approach. The contribution of the article lies in outlining the problems and analyzing groups of potential solutions, providing the basis for a new approach to the powering of mobile robots, not only in its current form, but perhaps in other development scenarios not fully specified at present, making the most of further developments in the global and local political, economic, environmental, and social situation.
Controversial and diverging hypotheses concern current research and further development of mobile robots, which are still limited by the diversity and slow pace of development of their power sources. This will be exacerbated by the current fuel and raw material crisis (including rare earths) and logistics problems (in transporting and ensuring smooth haul-offs under conditions of international conflicts and the current and expected future sanctions). Two main lines of research are therefore justified:
- the search for alternatives to current raw materials and structural solutions without technological change – battery surrogacy, even at the expense of deterioration in performance,
- the search for innovative design solutions – e.g., hydrogen generators, but less vulnerable to crises and sanctions (renewable locally).
Environmental issues and renewable energy sources remain an important element of the above-mentioned research and industry strategy. Despite the difficulties of current sustainability policies, these issues remain extremely important, especially as air pollution is likely to increase rapidly after the next winter.
A narrative review of publications from six major bibliographic databases according to preset inclusion criteria was combined with a critical analysis of current and future technologies. We have used the following keywords: mobile robots; power supply; battery systems, and similar in English. Review of Scopus database showed 3478 papers concerning mobile robots power systems published since 1973, but a significant increase in number of publications concerning this topic was observed since 1993, including recent review by McNulty et al. [6]. Despite many identified publications concerning mobile robots published so far, only thirty-two publications described below meet criteria of inclusion (original articles, published since 2013 in English, topics limited to battery systems or alternative energy supply in mobile robots). Structure of the article is presented at below. Section 2 shows mobile sources of energy for robots. In Section 3 power requirements for mobile robots are highlighted. Section 4 discusses the problem of energy efficiency of mobile robot movement. In Section 5 power supply system selection process is described. Section 6 is discussion of future mobile robot power systems. Conclusions are collected in Section 7.
2. Mobile Sources of Energy for Robots
2.1. Mobile Robots Actuation Systems
So far, a number of ways to actuate mobile robots have been developed: mechanical, electrical, hydraulic, or pneumatic. Purely mechanical systems are not common today due to complex design and limited control capabilities. Combination of mechanical and electrical systems or mechanical and pneumatic/hydraulic actuations are the most widely used due to controllability and relative simplicity of the design.
In electro-mechanical drive systems usually, rotary motion created by motor is transformed using gearboxes and linkage systems to usable mechanical actuation. In case of hydraulic or pneumatic actuation, sliding motion is the primary result of those actuators, therefore, mechanical linkages are the easiest solution to transform sliding motion into more complex 3D joint rotations.
In each of the cases described, the control and detection systems need electricity to operate. In the case of hydraulic and pneumatic systems, servo valves are electrically controlled to achieve fluid flow to the actuator from pressure tank and to release pressure from actuator’s other end to enable motion. In the case of electrical drive, the control of current and voltage applied to the motor windings provides ways of controlling speed, acceleration, and torque produced by such actuator.
This implies need for electrical supply in any modern robotic system configuration. In purely electrically actuated robot, same supply for the actuation system and control system can be used, however, care must be taken to ensure power rail for the control and sensors is free from interference from the noisy motor drivers. This effect can be provided, for example, by using an additional power source for the control and detection system. Pneumatic and hydraulic systems require pressure tanks and/or compressors/pumps to generate fluid power. This implies, that main energy source for such systems could be purely fluid pressure storage, pump/compressor powered by combustion engine or electric motor, or a combination of hydraulic storage and pump/compressor supply operated with some prime energy unit. In such systems, energy for control and sensing can either be provided from individual electric energy storage, or by energy conversion from the main energy source.
Yang et al. [12] summarizes the use of various energy sources in robotics. Proposed division of sources by the way they generate, and store energy includes the following functional categories for:
- energy storage - including batteries, capacitors, and super capacitors,
- energy generation - including classical electromagnetic generators, fuel cells and solar cells,
- energy harvesting - including electrochemical, wireless, thermoelectric, photovoltaic and nano-generators.
2.2. Energy Storage
The main mobile robot energy sources are rechargeable batteries which are prepared from different materials. For best performance, low weight, high current draw capability and high capacity are required. Battery voltage is also an important parameter as power losses are increasing with square relationship to current; raising voltage allows to reduce current and thus considerably reduce power losses and conductor cross-sections while maintaining the same power. However, it must be noted, that control electronics usually requires low voltage supply. For large robots, extra energy conversion is not an issue, but in small robots, supply voltage is often shared between control and motors, limiting energy conversions and component count in the design.
Electric energy can also be stored in supercapacitors. This type of storage is characterized by relatively large volume, but low mass and small energy density. However, it allows energy to be stored and extracted at high rates. Therefore, such storage is employed as additional power reservoir mostly for regenerative energy storage and supply of current in short overload states or during motors start when high amount of current is required.
In hydraulic and pneumatic systems, pressure tanks can be used for energy storage. They can serve as main or supportive storage devices. Their energy storage-retrieval characteristics is analogical to supercapacitors in electrical circuits. Both springs and flywheels can also be used to store small amounts of mechanical energy. While spring storage can maintain energy for long time, flywheels are subject to friction in bearings and air drag that limits the practical energy storage time, as energy is gradually dissipated.
2.2.1. Types of Rechargeable Batteries
To date, the lowest cost (per Wh) can be achieved by using lead-acid batteries, but unfortunately, they also provide the lowest energy density per unit mass (35-40 Wh/kg) [13]. On the other hand, the highest unit cost is for LiFePO4 batteries offering the highest energy density per unit mass (90-160 Wh/kg) [14]. Several years ago, new rechargeable battery technologies were developed that were dominating the market and they were based on Nickel, first Ni-Cd were later replaced with Ni-MH, both characterized by cell voltage of 1.2V. Currently, they are replaced mostly by lithium-based batteries, which provide higher energy density (100–265 Wh/kg), and higher cell voltage - 3.6 V. In addition, they do not show, so called memory effect and are characterized by a slight self-discharge effect (1.5-2% per month) [15]. As a cost trade-off, a problem that occurs in working with Li-ion batteries is the risk of fire. Contemporary lithium-ion batteries for walking robots (1.1 kWh) manufactured by CEO [16] use four fans to maintain their safe operation conditions, cooling 98 cells that produce 302.4 V in total. A detailed review of battery technology is given in [17]. All batteries, including Li-ion ones, however, have two main limitations—low energy capacity as compared to combustible fuels (petrol for example provides 13 kWh/kg, natural gas — 15 kWh/kg, and hydrogen — 34 kWh/kg), and relatively long charging time as compared to refueling time. Therefore, in applications where long active work time is required, either combustion engine generators are used, or battery swapping mechanism is adopted for fast replacement of batteries. While battery operation range for all major battery types is broad enough to accommodate use in all environments and seasons, the charging temperature limits in some cases require at least 0°C, what must be considered while selecting charging place or considering energy regeneration system. A summary of typical rechargeable battery parameters which depends on its material composition is presented in Table 1.
2.2.2. Battery Ratings
Batteries are characterized by ten key parameters: voltage, capacity, maximum current draw for short time, maximum continuous discharge current, maximum charging current, temperature range for storage and operation requirements, chemistry, weight, and overall dimensions. Integrators are mostly interested in the battery pack characteristics, which is a result of internal battery cell connections and battery cell properties.
Battery capacity is one of the key design parameters required by system integrators. It is commonly expressed in Ah (Amp-hours) or Wh (Watt-hours), for larger capacities kWh are used, and for small capacities mAh is popular unit. It should be noted that Ah describe battery capacity in terms of battery capability to provide current over time – for example 10 Ah battery can either supply 2 A of current for 5 h or 1 A of current over 10 h period, in either way discharging completely a fully charged battery. On the other hand, capacity can be expressed in terms of work (power over time) that can be done using Wh unit. In such a case a 10 Wh battery could provide 1 W of power to an appliance over 10 h that correspond to a complete discharge cycle. The relation between Ah and Wh is linked by the battery voltage. While comparing same voltage battery packs, both capacity ratings can be used for capacity comparison, nevertheless, comparing batteries with different nominal voltages should be based on Wh instead of Ah. From Watt unit definition for electrical power one can derive that 1 W of electrical power is equivalent to the current of 1 A flowing across 1 V of voltage potential in a conductor. It means, that capacity expressed in Ah gives an estimate of how many hours a system consuming 1 A of current at battery nominal voltage could be powered by the specific battery pack, while the Wh rating gives more universal information on how long battery pack can supply specific power for an appliance (irrespective to the actual voltage requirement). Integrating current and voltage into power makes more sense in robotic applications, where the work, and therefore power demand over time, is expressed in Watt-hours, while current and voltage are often secondary derivatives from the energy rating.
Interfacing battery to electronic control systems, sensors, and actuators requires matching voltage range. Elements that contain internal voltage regulation circuitry, have usually wider range of accepted voltage, while devices without such circuitry will require specific voltage to be provided either directly from the power sources or through intermediate regulator. Battery voltage changes throughout the discharge cycle from the above nominal voltage to a few percent below the nominal voltage. For example, a fully charged LiPo battery cell will show 4.2 V, nominal voltage being 3.7 V, and fully discharged battery voltage is 3.27 V. This shows 0.93 V range between fully charged and fully discharged battery level [19]. It must be noted that the fully discharged state should not be reached with any battery chemistry as it often leads to permanent battery damage. A safe minimum charge limit is around 15% of the total charge, which for LiPo battery is 3.7 V. This implies that the actual battery capacity available for the robot is limited by the application defined maximum discharge level. In case of airborne machines or safety critical devices, where power loss can cause damage to the equipment or injury to a human, the maximum discharge level is set to something above 50% of the total charge, ultimately limiting useful battery capacity to half. For remaining battery capacity measurement, it should be remembered that the voltage to capacity is a non-linear relationship.
Number of cycles that battery can undergo before reaching its lifetime varies depending on the temperature range in which battery is used, allowed discharge level and maximum charge level, and periods where the battery is not used at all. Each charge-discharge cycle of a battery contributes to its wear. The deeper the discharge the more wear it b by providing heatsinks or forced cooling) allows to raise that limit, what is especially important if short charging time is required [20]. Similarly, as in case of discharge current, the charging current affects total battery lifetime, fast charging with high currents shortens battery life, slow charging can extend the number of cycles that battery can handle. As drained battery can take significant current, the current during charging cycle needs to be controlled by the charger. All batteries can be charged using constant voltage, constant current approach, where during initial part of the charging the current is limited by automatic selection of charging voltage, and once battery reaches predefined charge state, constant voltage is applied that is equal to maximum voltage the battery is supposed to reach [21]. In this last part of the process, when current drops below predefined threshold, or time of charging reaches preset limit, the charge cycle is assumed to be over. In fast charging, in addition to current limiting, battery temperature must be monitored, as battery performance over time degrades leading to increased heat generation during use and charging.
Each battery has a rating for allowable temperature range when it can be used. Extreme temperatures affect the total capacity available for the appliance. Lower temperatures can extend battery lifetime, but at the expense of lowering apparent capacity, elevated temperatures decrease battery lifetime at the benefit of increased apparent capacity available. Battery capacity can reduce below 50% when temperature drops below -18˚C, the actual effect depends on the battery chemistry. Therefore, this effect should be considered while designing robots that should be used in freezing conditions. To provide optimal battery working conditions in special applications, systems for cooling as well as for heating are designed and integrated into battery pack. For example, in automotive industry this is utilized and in NASA’s Ingenuity helicopter used on Mars.
Battery weight and overall dimensions are the final parameters that should be considered while choosing a power system. Weight and size are linearly correlated with the capacity of the battery. Most of the available battery chemistries allow batteries to form in rectangular and tubular shapes of diverse sizes. When building up battery packs, the individual cells can be arranged as desired to form more complex battery pack shapes. Nevertheless, individual cells should be identical in a battery pack. As battery packs can represent substantial weight of the robot, it is important to consider it while designing battery compartment location to account for mass distribution and static and dynamic center of gravity location of the whole robot.
2.3. Battery Technologies
A SWOT (Strengths, Weaknesses, Opportunities, and Threats) analysis of the innovative batteries showing their characteristics compared to current, traditional technologies is presented in the Table 2.
Although Li-ion batteries are state-of-the-art, graphite in anodes has drawbacks in meeting energy and power density requirements and reducing the cost of battery systems. Thus, conversion anode systems (oxides, sulfides), alloyed systems (transition metal carbides), molecularly designed open framework systems – metal-organic frameworks (MOFs), covalent organic frameworks (COFs) and organic-inorganic hybrid perovskites (OIHPs) are used [18].
The above analysis shows that work on the development of innovative functional materials (e.g., quadruple perovskites) consisting of elements found in the earth plays a key role in modern materials science [22].
Risk analysis allowed identifying the following risks:
- technological: novel breakthrough technology as a game-changer,
- strategic: a new competitor coming to the market,
- compliance and regulatory: introduction of new rules or legislation,
- financial: global crisis can cause more non-paying customers,
- operational: breakdown or theft of key industrial equipment based on advanced microprocessors and software.
Strategies of risk mitigation include: monitoring the state-of-the-art and law rules, upgrading of the software, spare parts, avoiding of the lean management, relying on open-technology and open-software.
2.4. Sustainbility of Powering Robots
Sustainability as the main problem of XXI century and its influence on current situation of power shortages and limitations. Electric devices as zero emission solutions [23,24]. With the increasing number of automated vehicles and robots, and the increased demand for raw materials such as lithium, scientists, engineers, and economists are still looking for a more sustainable solution for mobile energy storage.
Rapid and continuous progress in perovskite solar cell (PSC) technology and in photodetectors, light-emitting diodes and batteries has also been achieved through a variety of device configurations, layer deposition optimization, defect control and research into different material systems, grain boundary (GB) engineering and stress engineering. A stable power conversion efficiency (PCE) of 25.2% has been achieved in PSCs [25].
Perovskite oxides are also crucial for oxygen electro catalysis (oxygen reduction (ORR) and oxygen evolution (OER)) which play a significant role in oxygen-based renewable energy technologies (metal-air batteries, regenerative fuel cells and water splitting). Perovskite oxides (perovskite/carbon composites) as efficient ORR and OER catalysts are replacing noble metal-based catalysts. They are characterized by high intrinsic catalytic activity, high diversity, low cost, and rich resources [26].
2.5. Battery Management
Battery management system (BMS) is the first circuitry directly connected to a battery. The role of BMS is protection, monitoring, and control of the battery pack. BMS is in control of the battery condition, monitoring: temperature, charge level, providing overcurrent, overvoltage, and undervoltage protection. In addition, BMS can provide safety features allowing to disconnect the whole battery pack or individual battery cells if it detects fault. In addition, diagnostic, acquisition of charge-discharge history and protection of the battery from short circuit can be achieved through BMS. Battery management systems can in certain applications be omitted – low power, low voltage devices, where condition monitoring is part of the user’s responsibility. While such arrangement can save some cost and space on the BMS implementation it is a bad practice and can lead to premature battery failure due to human error or misuse.
BMS in many applications is a standalone component that does not communicate with anything. It only protects the battery and does not accumulate any data. In more advanced implementations it provides an interface for the user to monitor in real-time battery status and usage history. In large battery packs BMS can also include active components like fans for cooling the battery, heaters for maintaining temperature in winter conditions, or balancing circuitry that enables equalization of charge level between individual battery cells. BMS can also be integrated in the charging system, in such arrangement charging system should be part of the battery pack, so that the BMS could protect and monitor battery also during normal use.
In any application, where multiple battery cells are combined into a battery pack, cell balancing starts to be important. Differences in cell manufacturing leads to variable resistance and capacity of a cell, what influences work temperature and current passing through individual cells in the battery pack, leading to shorter lifetime of individual cells and in a result shortening the whole battery pack lifetime. When cells are combined only in series to form battery pack, the initial balancing can be sufficient for the battery lifetime. In parallel configuration, cell resistance differences lead to variable use of battery cells during charge and discharge cycles leading to uneven aging of the cells in the battery pack. Cell charge imbalance can lead to problems when full charge level is expected from battery pack. As charger tries to reach the total voltage of a battery pack, if individual cells are undercharged compared to the others, then the other cells will become overcharged and can be damaged.
2.5.1. Power Control of Batteries
Power delivery from battery pack to individual components can be controlled on several levels. First, voltage regulation must be considered. Sensors and electronic components belonging to the control system require typically low voltage and low power supply as compared to active elements. Stability of the voltage level on the control and sensors supply is important to maintain system stability and accuracy of measurements. Good filtering and noise suppression on power lines for electronic components is necessary. Sensor selection as well as control circuitry can be based also on the interface voltage that they require. For battery operated systems, there is a large number of compatible sensors that reduce the need for voltage shifting. Controllers can operate on 3.3-3.6 or 5 V levels typically. Integrated controllers based on mini-PC components usually require higher voltage in the range of 12 to 19 V, and they manage voltage internally for individual modules.
Sensors are often designed to interface to either 3.3 or 5 V controllers, but industrial grade sensors are often designed to work with 24 V supply.
In battery operated systems, every bit of energy counts, therefore it is important to provide control circuitry that allows switching on and off, every part of the system that can be at least periodically disabled. This offers a great deal of control over power consumption and functions provided by the robot. Modern components with digital interface can provide low power mode operation that is available through their control interface, in such a case, additional power switches are not necessary for such elements. Other components are fully active whenever they are powered on, for such components it is a good practice to design individual power control module that will allow managing their power state.
Power up and power down sequences are important due to stability reasons and current draw that can be substantial for specific components on startup. Power control circuitry should allow selective enabling of individual sub systems to implement gradual power up sequence and energy saving modes.
While powering down, data acquisition, and actuation tasks need to be finished before power is removed. For legged robots, a statically stable pose must be achieved, motor brakes might need activation, before power can be removed. Smart power system is responsible for maintaining power to the control unit while it is still busy and informing it about planned power down, to allow saving robot’s state on power down, preparing power off stable position of a robot, and only at the end disconnecting power.
During normal operation, several components might require active power control. Such components include mostly actuation systems but could also include additional modules or sensors. Motor controllers use control signal to determine desired speed, position or torque that should be provided by the motor. By changing amount of power delivered to the motor, controller affects motor torque, speed, and position. Motor controllers are relatively efficient devices, but with high power motors, the amount of heat dissipated in the motor controller can be substantial and might require active cooling, that has to be considered by the power control system.
2.5.2. Voltage Level Shifting
Adjusting voltage level of the power supply to individual component needs requires level shifting. In small robots a single cell battery can be sufficient to power all components, but voltage requirements of the motors might require step-up voltage shifting to provide sufficient torque for the motors. Alternatively, a two-cell battery could provide sufficient power to the motors, and step-down voltage converted could provide lower voltage for the controller. While both solutions will work, the second one will be slightly more efficient, as motor current will most probably be much higher than the current required for the controller, and each level shifting introduces inefficiency in the power path, converting part of the energy to heat that needs to be dealt with. This indicates that the main power voltage should be adjusted to the needs of the most energy hungry component in the robot, what in practice means actuation system.
It is rather difficult to create robotic system that utilizes only single voltage supply level. Mostly since energy consumption of the motors, in most designs, will be significantly higher than for the controller and sensors. But even among sensors and controller components, there might be two or three different voltages needed. Low-power devices, and fast processors tend to operate at low voltages, typically around 3.3 V, simple microcontrollers and many integrated systems on module solutions prefer 5 V input and internally lower it and condition for individual subcomponents. Sensors that are designed for battery operated devices, fall into the 1.8 to 3.3 V supply voltage category, while sensors that require more power, or are designed for simple interfacing with microcontrollers prefer 5 V level of voltage supply. Industrial grade sensors can have wide range of supply voltage, either by design or using integrated voltage shifting module. They can work within 5 - 24 V typically.
For low power (<500 mA current draw) components there is a wide selection of step-up, step-down as well as integrated buck-boost converters offering high efficiency exceeding 90% in optimal conditions. In general step-down converters reach slightly higher current capabilities and higher efficiency than boost converters. For larger powers, such converters can maintain high efficiency, but the total energy lost starts to be substantial and can significantly contribute to battery work time.
Due to the tolerances of up to a few volts in electronic components, and low voltage drop on batteries composed of a single or two cells, it is possible to design a system that does not require voltage regulation at all outside individual components. If possible, the voltage delivered to the most power-hungry component should be in the range, that would eliminate wasteful need for its regulation and shifting. However, in most practical applications, when multi-cell batteries are used, voltage regulation is obligatory to keep components within their safe voltage levels as the span of voltages between fully charged and lowest allowable charge level differ by several volts.
2.6. AI-based Optimization of Robots’ Power System and Battery Management
AI-based technologies can cover material optimization, designing and production, as far as AI-based control of consumption and reaction to risk factors, low-power and no-power solutions, and AI in renewable energy sources. Direct application of the AI in mobile robots includes better route planning, which may significantly influence power consumption and range of operation. These aspects can be optimized, and robots can learn the route and associated terrain, using their experience during next tasks, e.g., using the properties of the terrain (e.g., its slope) to save energy and even for energy recovery or battery charging. The above-mentioned operating strategies can extend the autonomy of such a robot almost indefinitely if it uses adventurous and diverse sources of battery recharging and conserves energy. The sharing of knowledge and resources between robots also seems key here, as a herd of robots works more efficiently, especially when mapping unfamiliar terrain. In this way, it is possible to approach low-power or even no-power solutions, although the energy balance must be maintained. This becomes particularly important in mobile robots that operate for extended periods of time in the field, e.g., in agriculture in fields (including monitoring water balance and crop condition) or in water (e.g.: monitoring water levels, water bottoms, water pollution, etc.). The challenge here is a cold climate with polar nights.
The growing interest in the use of mobile robots requires minimizing the cost of maintaining the robot, while one of the main costs is energy consumption. A novel method of developing an energy consumption model for UAVs (Unmanned Aerial Vehicles) based on machine learning (ML) and requiring no knowledge of the drone's design was presented by Góra et al. [27]. The aforementioned study achieved high energy prediction accuracy (97.5%) and short learning time (2 ms) for the largest dataset.
2.7. Case Study: Powering of Robots for IoT and Metaverse Purposes
Robots as sets of mobile agents are important part of recognition systems or systems for exploration works, or group work. Communication between robots is required to provide control layer that can prevent dead-locks situations and centralize path planning to avoid congestions in robot traffic. Collection of sensor data in cloud environment is necessary to implement cloud computing and limit processing on board of each mobile unit. As data processing can be computing resources consuming, so would it consume considerable amount of energy. Therefore, it is common to shift data conditioning and processing to stationary computers from mobile robots, limiting computing resources demand to bare minimum offering robots’ self-sufficiency in environment. The IoT (Internet of Things) facilitates offloading data processing from robots to stationary computers providing common standardized interfaces and data protocols like MQTT (Message Queuing Telemetry Transport) [28]. A balance must be found between onboard and off board data processing, while first option provides robot independence from infrastructure, it raises energy consumption, complexity of the robot control system and therefore overall cost and weight of the robot. Offloading computation to cloud, on the other end, limits need for computing power, but increases demand for fast connectivity and, in ultimate case, makes robot incapable of doing anything when connection is unavailable. To meet the demand for data transfer and limit latency, 5G and 6G mobile networks are required. In constrained environments also Wi-Fi or on small scale Bluetooth can be sufficient.
Sensors and effectors for IoT are designed with low power consumption in mind and fast data interfaces. Nevertheless, control system must plan and utilize use of power saving modes implemented in such sensors, to reach the lowest possible energy consumption. Power delivery system on the other hand must be ready to support burst demands for power when sensors and actuators are wakened up. For swarm robots or group of working robots the role of the cloud computing layer as a centralized planning system is large, as it can provide optimization of power consumption considering mission plans for all the robots in a group and by utilizing robots positioning data limit the need for all around sensing of each robot and other robot direct recognition. Ambient Intelligence (AmI) and Affective Computing (AC) are the next step, and their power requirements need to be considered in the robot power system design.
2.8. Case Study: Alternative Robot Power Sources
In addition to batteries, combustible fluids, and mechanical energy sources, which are commonly used in robotics, there are additional energy sources that in certain conditions can be utilized. The most basic and simple in implementation are solar panels. They provide however limited amount of energy and require relatively large surface area to be effective. Wind energy is another option, a hydrogen power cells seem promising option to replace batteries all together. Biological sources of power can generate another challenges, chances and threats.
3. Power Requirements for Mobile Robots
The selection and implementation of a battery power supply for a mobile robot and the management of mobile robot batteries is crucial for the safe and efficient operation of the system during a work shift. Several factors should be taken into account:
- distance to be travelled and difficulty of the terrain,
- required speed and acceleration,
- power consumption (including computing, sensing, communication during work),
- weight of the payload (also its loss or increase along the route),
- effect of the weather (e.g., increased power consumption at low or elevated temperatures),
- required operating time between charges,
- density and availability of the charging stations,
- possibility of recharging/refueling at the right time,
- ability to change batteries between shifts,
- the chemical composition of the batteries and their environmental effect,
- battery size and weight.
Analyses of energy consumption during movement to estimate the maximum range of mobile robots indicated that propulsion and control are not the most energy-intensive functions, while computation, sensing and communication are. Drive energy represents only a small fraction of the total energy consumed. Based on this, ways to improve the maximum reach of the robot, increase the speed of the robot or extend the duty cycle (the ratio of driving time to total mission time) were identified [29].
We can consider diverse types of mobile robots and they are characterized in the following sections.
3.1. Walking Robots and Wheeled Mobile Robots
For each robot, designers need to select energy source. An adult human of a weight of 80 kg needs around 270 to 560 W of metabolic energy to walk [30]. This could be used as the first approximation of energy demand for a human-size walking robot. The 80 kg DURUS robot used an on-board 2.2 kWh lithium-polymer battery [31], and the BigDog robot uses a small internal combustion engine from a go-kart (11 kW) to drive a hydraulic pump and electric generator [32]. However, the BigDog robot's internal combustion drive was deemed too noisy for military applications, which redirected development toward an all-electric drive. The Lucy robot uses external compressed air tanks or compressors [33]. Thus, pneumatic actuation can be implemented either by integrating a compressor (powered by an electric or internal combustion engine) or by using a compressed air tank.
The hydraulically powered robots (PETMAN [34], ATLAS and ATLAS DRC [35]) used external sources of supply pressure. The ATLAS unplugged robot [36] used a supply pressure source located on its deck, which increased its total weight from 152 kg to 182 kg (i.e., by 19.74%). The current version of the ATLAS robot [31], based on an improved hydraulic system design, weighs 80 kg and measures 151 cm in height. Source [36] presents simulation results for a HOAP2 humanoid robot. Study suggests that a hybrid fuel cell power supply is superior to conventional batteries.
There are emerging new possibilities for powering robots. The small 88-millimeter RoBeetle robot [37] is powered by catalytic combustion of methanol (with a specific energy of 5.6 kWh/kg). In comparison, a good-performance Li-ion battery provides just 0.5 kWh/kg, and the specific energy of animal fat is almost twice as high (10.6 kWh/kg). Scaling up this solution could be a groundbreaking for mobile robotics.
Scientific and industrial centers are conducting intensive research in the area of photovoltaic to power robots [38]. A small solar-powered walking robot has been presented [39]. Hybrid approach, where solar power is used to charge rechargeable battery pack can be seen in humanoid robots such as ATLAS [38].
Interesting design of a solar robot with wheels are: Tertill [40] or Vitirover [41]. Wheeled robots are often used as Autonomous Mobile Robots (AMR) [6]. These robots require a suitable onboard energy system that provides appropriate: voltage, power, and capacity. This depends on the technology and function required. AMRs have been equipped with advanced sensors for the perception system (digital camera, Lidar system etc.). The AMR picker has been equipped with robotic arms with a gripper. AMRs also require a motion drive power supply. The detail explanation of used sensors and equipment of AMRs interested readers can find in [6]. Li-ion batteries have been used for most of these robots. Most AMRs are equipped with modern Li-ion batteries with a LiFePO4 cathode and a graphite anode. As the voltage of a single LiFePO4/graphite cell is ∼3.25 V, the batteries are used in series-parallel [6] connection to achieve the necessary voltage and capacity. The operating voltage for AMR batteries can range from 12 to 96 V and the capacity can vary from 10 to 200 Ah. AMRs have specialized functions affecting total mass, sensory equipment, and power supply parameters. Selected examples are shown in the Table 3 for LiFePO4/graphite and Li-ion cell.
Boston Dynamics Handle robot is an AMR equipped with two legs with wheels [51]. This robots using also two arms. Its kinematics combines the rough-terrain capability of legs with the efficiency of wheels. Using manipulator arm it is capable of picking up heavy boxes up to 15 kg. This is the reason why this robot is so heavy – 150 kg, and high – 200 cm (maximum reach 280 cm), and works with pallets that are 1.2 m deep and 1.7 m high. Robot uses onboard battery typical for Boston Dynamics.
The Connor UVC Disinfection Robot [52] is designed for indoor virus prevention. It is equipped with cutting-edge technology including UV sterilization lamps and an automatic disinfectant spray module. It's currently used to fight Coronavirus (COVID-19).
3.2. Hybrid Mobile Robots
3.3. Critical Issues: Powering of Medical Robots
Rechargeable batteries and batteries for medical devices are mainly made of NiMH, Li-Ion or Li-Polymer cells, while the sale of Ni-Cd batteries for all models of medical devices is prohibited throughout the EU [56-58]. eHealth paradigm constitutes response to the challenges of healthcare system, including medical staff shortages.
Robotic assistive devices, primarily mobile (feeders, intelligent wheelchairs, independent mobile, and assistive robots), are increasingly used to improve the independence and quality of life of people with disabilities. They are becoming more and more clinically relevant, and social awareness of their role and availability is growing [59].
3.3.1. Surgical Robots and Stationary Robots for Rehabilitation and Care
Surgical power tools (SPT), including surgical robots, are in common use in many surgical specialties [60]. The da Vinci Surgical Robot, for safety, includes an emergency battery that allows the system to function for twenty minutes during a general power outage, allowing surgery to continue once power is restored. Lithium-thionyl and lithium-manganese cells and batteries are used. They provide reliable, long-lasting power for robot control systems with a service life of 5 to 10 years. This allows critical configuration information to be retained in the event of loss of external power. In addition to having to endure between servicing, they should offer high safety, low weight, long life, environmental suitability, and fast charging. It should be noted that in these types of robots, there may be multiple batteries supporting various consoles and functions. Solutions here are like in surgical robots, due to safety requirements of patient and medical staff [61].
3.3.2. Wearable Robots Including Exoskeletons
Exoskeleton gait training is equivalent to traditional therapy for patients with chronic stroke, but it will be a long time before powered exoskeletons can be turned into a clinical tool for gait rehabilitation after stroke [62]. The active work cycle (the time between charges) of exoskeletons is their biggest problem, so advances in the area of batteries could translate into the fastest technological success here.
Future technologies for medical robotics are there: Lithium-Sulfur (Li-S) batteries, sodium-ion (Na-ion) batteries (do not consume any scarce resources, just salt, but are approximately three times heavier and are less powerful), and solid-state batteries (with graphite-based anodes, or rather metal lithium anodes).
4. Energy Efficiency of the Mobile Robot’s Motion
4.1. Definition of Energy Efficiency of a Mobile Robot
Researchers are often concerned with energy efficiency when considering walking robots, which becomes particularly important when robots are equipped with a limited amount of energy stored in the power source. This determines the robot's range, which depends on the efficiency of the propulsion system. The problem of energy efficiency of movement (of people, animals, etc.) was first analyzed by Trucker [63], who introduced the concept of cost of transportation (COT):
where: P — the power of move, W — weight, v — speed. The weight of the robot depends on the mass and gravity parameter hence the cost can be represented as [64]:
where: M — mass of the robot, g —gravitational acceleration.
Kajita et al. [65] and Sakagami et al. [66], in turn, proposed the specific resistance (SR) as a way to assess the energy efficiency of a mobile robot. This parameter is defined as follows:
where: E — Energy consumption, d—distance of the move.
The SR parameter defined in this way is equivalent to the COT parameter. For all parameters from formulas (1), (2) or (3) expressed in a coherent system of units, these quantities are dimensionless and represent the same value.
Kashiri et al. presented a review of the principles of energy-efficient robot movement [67].
4.2. Energy Efficiency of Mobile Robot
To ensure transparency and replicability of our inference, a brief comparison of different types of mobile robots presented in the following subsections was conducted.
4.2.1. Walking Robots
Based on references, it is possible to obtain some results of the COT or SR value of different robots and to compare humans and four-legged robots. For MIT’s cheetah quadruped, which exploits electrical energy regeneration/recycling, the COT is about 0.5. A human is down to around 0.2 [68], while Asimo (54 kg) exhibits COT = 2 for 1.5 m/s [69]. In the DARPA competition between robots, the best was SRI’s DURUS robot [70,71], which, with a fully charged battery, walked 2.05 km to run the battery dry in 2 h, 35 min, 43 s. The walking of the DURUS robot can be seen in the movie [72]. While walking, it used around 350 watts of power, giving it an average COT of about 1.5, which is better than the Atlas robot, which has a COT of 20 [70]. SRI estimates that in the future, it will be possible to obtain for the DURUS robot a COT under 1, and with its onboard 2.2 kWh lithium-polymer battery, the 80 kg robot should be able to walk 10 km [70]. ANDIA laboratory’s present special design of Walking Anthropomorphic Novell Driven Efficient Robot for Emergency Response (WANDERER) [73]. It is possible to see the mechanism of the robot and its walking in [74]. One of the best bipedal walking robots in terms of transportation cost is Cassie [75,76]. The new design of the Cassie robot (31 kg) has a low COT value, allowing Cassie to run for 6–8 h on a single charge. This robot based on the original design obtains excellent running results, completing 5 km inapproximately 43 min [77]. When walking at 1.0 m/s, using a total of 200 watts of power, while performing different locomotion behaviors such as squatting, the calculated COT was 0.7.
4.2.2. Hybrid Robots
The LEO robot reached v = 0.2 m/s while walking, COT = 108 [78]. LEO consumes 544 watts while walking on the ground, of which 445 watts are for the propellers and 99 watts for the electronics and legs [78]. With a nominal walking speed of 0.2 m/s, the LEO's total speed relative to the ground can vary due to intermittent flight close to the ground (at 1-3 m/s). However, during such flight, the LEO's energy consumption almost doubles due to the large energy expenditure of the stabilizing propeller drive system. For example, when flying at v = 1 m/s, COT = 48, and at v = 3 m/s COT drops to 15.5 [78].
5. Power Supply System Selection Process
Selecting power supply for a mobile robot begins with determining a list of components that require power. Those components should be then grouped by the type of power they require mechanical, electrical, pneumatic, and hydraulic. Within those groups a second level of grouping is necessary – by power supply parameters required. In the case of mechanical power, every mechanism requires some type of energy, either as rotary motion, then rpm would be the division criteria, or by motion trajectory for planar and 3D mechanisms. In electrical systems, voltage is the main factor used to group components. In pneumatic and hydraulic systems pressure and medium are the two criteria, for example separating water hydraulics from oil hydraulics as both require separate power sources.
Then within each subgroup typical and maximum power must be determined. A consecutive step is determining the main group that has the highest power demand. It can happen that there are two groups with similar power demands, then those two groups should be considered equivalently important. Knowing which source of power is the primary power, selection of power supply for this group can be made. In the case of mechanical power supply various energy storage mechanisms can be selected including electric motor or hydraulic motors and, therefore, energy conversion option. In the case of pneumatic/hydraulic system pressurized fluid can be stored in pressure tanks if the demand and weight of the tank are acceptable providing required amount of energy for the application. Pumps and compressors can also be used to convert mechanical or electric energy to fluid power. When the main energy storage is determined for the most power-hungry system, the next in line system power supply should be selected. In this process it must be determined if the power supply should be based on an individual independent solution from the main power supply or energy conversion should be used from the main power supply. Converting energy from the main system requires additional components, which might be either expensive or bulky, it also requires increasing of the main energy storage to support the second system power demand. Use of individual supply can mean more maintenance but provides separation from noise and independence – for example control system being powered from own supply could work uninterruptedly even, when the main power source fails or fully discharges, allowing to for example maintain communication and report problems or shutdown gracefully other sub systems. Choice between energy conversion from first to the next system or selection of independent power source should proceed until the last subsystem. A graph illustrating power supply selection is presented in Figure 1, for clarity details of selecting electrical system power supply process are presented separately in Figure 2.
In energy balance in addition to energy consumers, suppliers should also be considered if they provide substantial amount of energy. Such energy harvesting systems comprise of regenerative braking – part of the hardware and software design, solar panels, thermoelectric modules recycling waste heat, and similar.
Knowing general requirements for the prime power supplies, more detailed selection can take place. For electrical supplies, several options should be considered based on available battery technology and knowledge of regeneration systems that are part of the design. As batteries have limitations on the amount of charge they can take in charging or regenerative energy harvesting, if the pulses of energy are beyond battery specification, intermediate energy storage like supercapacitors should be considered. If regenerative energy is in mechanical form, also mechanical means of energy storage should be evaluated to determine the most efficient overall solution.
6. Future of Mobile Robot Power Systems
6.1. Directions for further research
Future research directions in the area of batteries technology for mobile robots are following:
- batteries based on seawater (Karlsruhe Institute of Technology, Germany) [79, 80],
- iron-flow batteries (but larger) [81, 82],
- silicon as the anode in a lithium-ion battery - organosilicon based liquid solvents [83, 84],
- magnesium metal batteries (twice the energy density than current solutions), e.g., zinc-manganese oxide battery [85, 86],
- lithium sulfur battery technology made of B4C-hemp i.e. Boron Carbide made from hemp [87-89],
- lithium tungsten battery [90, 91],
- gold nanowire gel electrolyte batteries (gold nanowires reinforced with a manganese dioxide coating encapsulated in a Plexiglas-like gel electrolyte, which is reliable and fail-safe) [92],
- batteries containing a collection of small independent self-organizing cells [93].
The batteries development also covers their charging and lifetime monitoring and recycling – these technologies also should be replaced by novel ones.
There is the biggest problem of clean and cheap renewable power sources: they are dependent on environmental conditions, despite existing pumped hydro storage systems, sand- or volcanic rock- based systems, flow batteries, etc. Appropriate solutions must be provided for the future.
6.2. Limitatons of previous studies
Limitations of previous studies are defined through low amount of the open-source research and secret details of technologies. Thus, the number of existing technologies can be higher – it is like the big pharma industry.
The discussion of the research presented in this paper and the current economic situation in Europe indicates that current research is limited by the global crisis and material shortages. Thus, the technological possibilities are not fully exploited. Paradoxically, the time of war may cause another breakthrough due to the possible rapid development of flying drones, commonly used during the war in Ukraine starting on 24 February 2022. Implications in the broad context shows that progress is necessity, taking into consideration generation of the novel solutions in the area of batteries development. There are still many research gaps and a lack of knowledge to build useful datasets. Interdisciplinary research teams with robust big data on battery systems and materials could shed light on the actual performance of battery systems [94,95].
The article presents the state of knowledge and analysis of the sources of power systems of mobile robots moving in various ways on the surface. There are also mobile robots that also move in other environments in the air – UAVs (Unmanned Aerial Vehicles) or in the water environment AUV Autonomous Underwater Vehicles). The issues of drive sources of UAV are presented in a number of articles [96-104]. Due to the environment's need to overcome the force of gravity, these robots have special power requirements.
7. Conclusions
In this paper power systems based mainly on batteries from different materials for mobile robots were presented. Different energy sources were considered and detailed analysis of the electrical sources were performed. It can be summarized as follows:
- comparison of different types of batteries (Lead-acid, AGM, Gel, NiMH, LiPo, LiFePO4) show that the most versatile solution, characterized by high specific energy and specific power, low self-discharge rate per month and good safety is today LiFePO4 technology,
- new types of batteries with excellent qualities are the subject of research (batteries based on seawater Iron-flow batteries, silicon as the anode in a lithium-ion battery - organosilicon based liquid solvents, magnesium metal batteries lithium sulfur battery technology made of B4C-hemp lithium tungsten battery, gold nanowire gel electrolyte batteries),
- important parameter of batteries in applications is energy efficiency which depends both on battery chemistry and drive system of robot,
- summary of the bipedal walking robots and driving robots is presented with examples,
- AMRs are a very important factor in the development of Industry 4.0. Distinct types of AMRs are available: fetching, picking or sorting. These robots with different structure require different batteries (voltages, current supply, and capacity) to function efficiently. Mainly Li-ion batteries are used as power source,
- the use of Li-ion batteries containing a LiFePO4 cathode, and a graphite anode is increasing. For AMR application batteries from 12 to 96 V and capacities from 10 to 200 Ah are used. Individual (3.27 V) cells are combined in series/parallel connections to build such battery packs. The run time of robots is targeting (∼8.4 h) which is more than 3 times than the charging time (∼2.7 h),
-
modern batteries in applications have many benefits including:
- ∘
- higher operating voltage and higher capacity,
- ∘
- longer operating time,
- ∘
- shorter down time,
- ∘
- longer cycle life.
-
based on the review of power systems in the paper we propose:
- ∘
- algorithm for selecting main energy source for robot application in which we can consider of main source type (hydraulic, mechanical, pneumatic, electric),
- ∘
- algorithm of selecting electrical system power supply, which can help to find optimal electrical source (NiMH, LiPo, LiFePO4, supercapacitors).
Current mobile robot battery solutions are still a trade-off between weight/size and capacity, making them the biggest limitation of robots. Progress in battery development is too slow, limiting the development of mobile robots themselves and their autonomy and range.
Considering the broader perspective, we need to see changes taking place in the perception of the importance of sustainability, environmental pollution, energy costs and the availability of fuels, components, and raw materials, including based on AI-assisted optimization [89, 90]. Intelligently managed, more efficient, more cost-effective, and less environmentally damaging powering of mobile robots will not only allow the further development of manufacturing, transport, and services, but will also contribute to the development of new business models, including in the area of public transport (subscription model, vehicle sharing), which will have important scientific and technical, but also economic and social consequences
Further intensive research and implementation work is needed in the field discussed in this paper. In addition, the current global economic situation, including the energy crisis, may make the use of mobile robots too expensive and their expected market success will be postponed for many years, as may happen in the near future with the implementation of electric cars.
Author Contributions
Conceptualization, T.M., D.M., A.K., E.M., T.P., and A.Ł; methodology, T.M., D.M., A.K., E.M., T.P., and A.Ł. software, T.M, D.M., and M.M.; validation, T.M., D.M., A.K., E.M., T.P., and M.M.; formal analysis, T.M., D.M., A.K., E.M., and A.Ł. investigation, T.M., D.M., A.K., E.M., and M.S.; resources, T.M., D.M., A.K., E.M., T.P., M.M., and M.S.; data curation, T.M, D.M., A.K., A.Ł. M.M., and M.S.; writing—original draft preparation, T.M., D.M., A.K., E.M., T.P., M.M., and A.Ł; writing review and editing, T.M., D.M., A.K., E.M., T.P.,, and A.Ł.; visualization, T.M., D.M., A.K., E.M., T.P., and M.M.; supervision, T.M., D.M., A.K., A.Ł,, E.M., T.P., and M.M; project administration T.M., D.M., A.K., E.M., T.P., and A.Ł.; funding acquisition, A.Ł. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
Not applicable.
Acknowledgments
None.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Farooq, M.U.; Eizad, A.; Bae, H.K. Power solutions for autonomous mobile robots: A survey. Robotics and Autonomous Systems, 2023, 159, 104285 . [Google Scholar] [CrossRef]
- Rubio, F.; Valero, F.; Llopis-Albert, C. A review of mobile robots: Concepts, methods, theoretical framework, and applications. International Journal of Advanced Robotic Systems, 2019, 16, 2 . [Google Scholar] [CrossRef]
- Ballestar, M.T.; Díaz-Chao, Á.; Sainz, J.; Torrent-Sellens, J. Knowledge, robots and productivity in SMEs: Explaining the second digital wave. Journal of Business Research, 2020, 108, 119–131 . [Google Scholar] [CrossRef]
- Gul, O.M.; Erkmen, A.M. Energy-Efficient Cluster-Based Data Collection by a UAV with a Limited-Capacity Battery in Robotic Wireless Sensor Networks. Sensors 2020, 20, 5865. [Google Scholar] [CrossRef] [PubMed]
- Chen, T.-S.; Chen, J.-J.; Gao, X.-Y.; Chen, T.-C. Mobile Charging Strategy for Wireless Rechargeable Sensor Networks. Sensors 2022, 22, 359. [Google Scholar] [CrossRef] [PubMed]
- McNulty, D.; Hennessy, A.; Li, M.; Armstrong, E.; Ryan, K.M. A review of Li-ion batteries for autonomous mobile robots: Perspectives and outlook for the future. Journal of Power Sources 2022, 545, 231943. [Google Scholar] [CrossRef]
- Madden, J.D. Mobile robots: motor challenges and materials solutions. Science. 2007, 318, 5853, 1094–7. [Google Scholar] [CrossRef]
- Sánchez-Ibáñez, J.R.; Pérez-Del-Pulgar, C.J.; García-Cerezo, A. Path Planning for Autonomous Mobile Robots: A Review. Sensors 2021, 21, 23, 7898. [Google Scholar] [CrossRef]
- Abdallaoui, S.; Aglzim, E.-H.; Chaibet, A.; Kribèche, A. Thorough Review Analysis of Safe Control of Autonomous Vehicles: Path Planning and Navigation Techniques. Energies 2022, 15, 1358. [Google Scholar] [CrossRef]
- Szrek, J.; Jakubiak, J.; Zimroz, R. A Mobile Robot-Based System for Automatic Inspection of Belt Conveyors in Mining Industry. Energies 2022, 15, 327. [Google Scholar] [CrossRef]
- Szczepanski, R.; Bereit, A.; Tarczewski, T. Efficient Local Path Planning Algorithm Using Artificial Potential Field Supported by Augmented Reality. Energies 2021, 14, 6642. [Google Scholar] [CrossRef]
- Yang, G.; Bellingham, J.; Dupont, P.; Fischer, P.; Floridi, L.; Full, R.; Jacobstein, N.; Kumar, V.; McNutt, M.; Merrifield, R.; et al. The grand challenges of science robotics. Sci. Robot. 2018, 3, eaar7650. [Google Scholar] [CrossRef] [PubMed]
- May, G.J.; Davidson, A.; Monahov, B. Lead batteries for utility energy storage: A review. J. Energy Storage 2018, 15, 145–157. [Google Scholar] [CrossRef]
- Great Power Group. Square Lithium-Ion Cell. Available online: http://www.greatpower.net/cplb/info_159.aspx?itemid=292&cid=25 (accessed on 20 November 2022).
- Lithium-Ion Battery. Available online: https://www.cei.washington.edu/education/science-of-solar/battery-technology/ (accessed on 20 November 2022).
- Ultra-Light Battery Pack for Walking Robot. Available online: https://www.cie-solutions.com/robotics-battery-pack (accessed on 27 May 2022).
- Budde-Meiwes, H.; Drillkens, J.; Lunz, B.; Muennix, J.; Rothgang, S.; Kowal, J.; Sauer, D.U. A review of current automotive battery technology and future prospects. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2013, 227, 761–776. [Google Scholar] [CrossRef]
- Roy, K.; Banerjee, A.; Ogale, S. Search for New Anode Materials for High Performance Li-Ion Batteries. ACS Appl Mater Interfaces. 2022, 14, 18, 20326–20348. [Google Scholar] [CrossRef]
- Wang, Z.; Zeng, S.; Guo, J.; Qin, T. Remaining capacity estimation of lithium-ion batteries based on the constant voltage charging profile. PLoS ONE 2018, 13, 7, e0200169. [Google Scholar] [CrossRef] [PubMed]
- Che. Y.; Hu, Y.; Lin, X.; Guo, J.; Teodorescu, R. Health prognostics for lithium-ion batteries: mechanisms, methods, and prospects. Energy Environ. Sci., 2023, 16, 338–371. [Google Scholar] [CrossRef]
- Shen, W.; Vo, T.T.; Kapoor, A. Charging algorithms of lithium-ion batteries: An overview. 2012 7th IEEE Conference on Industrial Electronics and Applications (ICIEA), 2012. [Google Scholar] [CrossRef]
- Yamada, I. Novel catalytic properties of quadruple perovskites. SciTechnolAdv Mater. 2017, 18, 1, 541–548. [Google Scholar] [CrossRef]
- Kanoun, O.; Bradai, S.; Khriji, S.; Bouattour, G.; El Houssaini, D.; Ben Ammar, M.; Naifar, S.; Bouhamed, A.; Derbel, F.; Viehweger, C. Energy-Aware System Design for Autonomous Wireless Sensor Nodes: A Comprehensive Review. Sensors 2021, 21, 548. [Google Scholar] [CrossRef]
- Sperling, M.; Kivelä, T. Concept of a Dual Energy Storage System for Sustainable Energy Supply of Automated Guided Vehicles. Energies 2022, 15, 479. [Google Scholar] [CrossRef]
- Ali, J.; Li, Y.; Gao, P.; Hao, T.; Song, J.; Zhang, Q.; Zhu, L.; Wang, J.; Feng, W.; Hu, H.; Liu, F. Interfacial and structural modifications in perovskite solar cells. Nanoscale. 2020, 12, 10, 5719–5745. [Google Scholar] [CrossRef]
- Zhu, Y.; Zhou, W.; Shao, Z. Perovskite/Carbon Composites: Applications in Oxygen Electrocatalysis. Small. 2017, 13, 12 . [Google Scholar] [CrossRef]
- Góra, K.; Smyczyński, P.; Kujawiński, M.; Granosik, G. Machine Learning in Creating Energy Consumption Model for UAV. Energies, 2022, 15, 6810. [Google Scholar] [CrossRef]
- MQTT Specification htpps://mqtt. (accessed on 20 November 2022).
- Xiao, X.; Whittaker, W.L. Energy Considerations for Wheeled Mobile Robots Operating on a Single Battery Discharge. CMU-RI-TR-14-16,Carnegie Mellon University, Pittsburgh, Pennsylvania 2014.
- Farris, D.J.; Sawicki, G.S. The mechanics and energetics of human walking and running: a joint level perspective. J R Soc Interface. 2012, 9, 66, 110–8. [Google Scholar] [CrossRef]
- Boston Dynamics’ Atlas Robot Now Does Gymnastics, Too. Available online: https://www.youtube.com/watch?v=kq6mJOktIvM (accessed on 20 November 2022).
- BigDog—The Most Advanced Rough-Terrain Robot on Earth. Boston Dynamics. Available online: https://web.archive.org/web/20170518204101/http:/www.bostondynamics.com/robot_bigdog.html (accessed on 20 November 2022).
- Vanderborght, B.; Van Ham, R.; Verrelst, B.; Van Damme, M.; Lefeber, D. Overview of the Lucy project: Dynamic stabilization of a biped powered by pneumatic artificial muscles. Adv. Robot. 2008, 22, 1027–1051. [Google Scholar] [CrossRef]
- Alexander, R.M. Bipedal animals, and their differences from humans. J. Anat. 2004, 204, 321–330. [Google Scholar] [CrossRef] [PubMed]
- Guizzo, E. By leaps and bounds: An exclusive look at how boston dynamics is redefining robot agility. IEEE Spectr. 2019, 56, 34–39. [Google Scholar] [CrossRef]
- Thangavelautham, J.; Gallardo, D.; Strawser, D.; Dubowsky, S. Hybrid fuel cell power for long duration robot missions in field environments. In Field Robotics; World Scientific: Singapore, 2011; pp. 471–478. [Google Scholar]
- RoBeetle: A Micro Robot Powered by Liquid Fuel. Available online: https://www.youtube.com/watch?v=vd6tN19wilQ (accessed on 20 November 2022).
- Can Photovoltaics Power Humanoid Robots? Available online: https://www.azorobotics.com/Article.aspx?ArticleID=328 (accessed on 20 November 2022).
- Solar Walking Robot. Available online: https://www.youtube.com/watch?v=JSGqPvRPWEY (accessed on 20 November 2022).
- Meet Tertill. Available online: https://www.youtube.com/watch?v=VwTWhMbnq9g (accessed on 20 November 2022).
- Vitirover. Available online: https://www.pv-magazine.com/2022/02/24/solar-powered-robotic-mower-for-vineyards/ (accessed on 20 November 2022).
- Swift IAM Robotics, (Pennsylvania, United States of America). https://www.lotsofbots.com/media/robots/assets/SwiftBC0_Draft062020.pdf (accessed on 20 November 2022).
- Matthews AMR Matthews Automation Solutions, (Pennsylvania, United States of America). https://matthewsautomation.com/autonomous-mobile-robots/ (accessed on 20 November 2022).
- GR 1500 UPS KAZE Robotics, (Singapore). https://kazerobotics.com/products (accessed on 20 November 2022).
- RA660 Navi XL CleanfiXReinigungssysteme AG, (Uzwil, Switzerland). https://www.ra660navi.com/ (accessed on 20 November 2022).
- RB-Volcano Base Robotnik Automation, S.L.L. , (Valencia, Spain.). https://robotnik.eu/products/mobile-manipulators/134 rb-vulcano-en/ (accessed on 20 November 2022).
- Jackal Clearpath Robotics, Inc., (Ontario, Canada). https://clearpathrobotics.com/jackal-small-unmannedground-vehicle/ (accessed on 20 November 2022).
- Star robots (Star-L, Star-H) https://www.hansrobot.net/star (accessed on 20 November 2022).
- Caster Zhikete Robot Technology Co., Ltd. , (Beijing, China). https://www.youtube.com/watch?v=Vcpu5TK23gU (accessed on 20 November 2022).
- AMB UR5 Seer Intelligent Technology Corporation, (Shanghai, China). https://www.seer-group.com/ (accessed on 20 November 2022).
- Handle Robot, (Boston Dynamics USA) https://robots.ieee.org/robots/handle/ (accessed on 20 November 2022).
- Connor, RobotLAB Inc., (Delaware, United States of America). https://www.robotlab.com/store/connoruvc- 151 disinfection-robot (accessed on 20 November 2022).
- Fetch Robotics, Inc., (California, United States of America).https://fetchrobotics.com/ (accessed on 20 November 2022).
- Mikolajczyk, T.; Musial, J.; Romanowski, Ł.; Domagalski, A.; Kamieniecki, L.; Murawski, M. Multipurpose Mobile Robot. Applied Mechanics and Materials 2013, 282, 152–7. [Google Scholar] [CrossRef]
- Robotics—Power Source for Robots, 2013. Available online: https://www.azorobotics.com/Article.aspx?ArticleID=139 (accessed on 20 November 2022).
- Cheng, F.; Liang, J.; Tao, Z.; Chen, J. Functional materials for rechargeable batteries. Adv Mater. 2011, 23, 15, 1695–715. [Google Scholar] [CrossRef]
- de Vasconcelos LS, Xu R, Xu Z, Zhang J, Sharma N, Shah SR, Han J, He X, Wu X, Sun H, Hu S, Perrin M, Wang X, Liu Y, Lin F, Cui Y, Zhao K. Chemomechanics of Rechargeable Batteries: Status, Theories, and Perspectives. Chem Rev.2022, 122, 15, 13043-13107. [CrossRef]
- Chen J, Cheng F. Combination of lightweight elements and nanostructured materials for batteries. Acc Chem Res. 2009, 42, 6, 713–23. [Google Scholar] [CrossRef]
- Brose, S.W.; Weber, D.J.; Salatin, B.A.; Grindle, G.G.; Wang, H.; Vazquez, J.J.; Cooper, R.A. The role of assistive robotics in the lives of persons with disability. Am J Phys Med Rehabil. 2010, 89, 6, 509–21. [Google Scholar] [CrossRef]
- Deshpande, A.; Smith, G.W.; Smith, A.J. Biofouling of surgical power tools during routine use. J Hosp Infect. 2015, 90, 3, 179–85. [Google Scholar] [CrossRef]
- Trochimczuk, R.; Łukaszewicz, A.; Mikołajczyk, T.; Aggogeri, F.; Borboni, A. Finite element method stiffness analysis of a novel telemanipulator for minimally invasive surgery. Simulation: Transactions of the Society for Modeling and Simulation International 2019, 95, 11, 1015–1025. [Google Scholar] [CrossRef]
- Louie, D.R.; Eng, J.J. Powered robotic exoskeletons in post-stroke rehabilitation of gait: a scoping review. J NeuroengRehabil. 2016, 13, 1, 53. [Google Scholar] [CrossRef]
- Tucker, V.A. The energetic cost of moving about: Walking and running are extremely inefficient forms of locomotion. Much greater efficiency is achieved by birds, fish—and bicyclists. Am. Sci., 1975, 63, 413–419. [Google Scholar]
- Lim, C.; Yeap, G.H. The locomotion of bipedal walking robot with six degree of freedom. Procedia Eng. 2012, 41, 8–14. [Google Scholar] [CrossRef]
- Kajita, S.; Espiau, B. Legged robots. In Springer Handbook of Robotics; Siciliano, B., Khatib, O., Eds.; Springer: Berlin/Heidelberg, Germany, 2008. [Google Scholar]
- Sakagami, Y.; Watanabe, R.; Aoyama, C.; Matsunaga, S.; Higaki, N.; Fujimura, K. The intelligent ASIMO: System overview and integration. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IEEE), Lausanne, Switzerland, 30 September–4 October 2002; Volume 3, pp. 2478–2483. [Google Scholar]
- Kashiri, N.; Abate, A.; Abram, S.J.; Albu-Schaffer, A.; Clary, P.J.; Daley, M.; Faraji, S.; Furnemont, R.; Garabini, M.; Geyer, H.; et al. An overview on principles for energy efficient robot locomotion. Front. Robot. AI 2018, 5, 129. [Google Scholar] [CrossRef]
- DURUS: SRI’s Ultra-Efficient Walking Humanoid Robot. Available online: https://spectrum.ieee.org/durus-sri-ultra-efficient-humanoid-robot (accessed on 15 January 2022).
- Reher, J.; Cousineau, E.A.; Hereid, A.; Hubicki, C.M.; Ames, A.D. Realizing dynamic and efficient bipedal locomotion on the humanoid robot DURUS. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 1794–1801. [Google Scholar]
- SRI’S DURUS. Available online: https://www.youtube.com/watch?v=HyqT9Bdamt8 (accessed on 20 November 2022).
- Hobart, C.G.; Mazumdar, A.; Spencer, S.J.; Quigley, M.; Smith, J.P.; Bertrand, S.; Pratt, J.; Kuehl, M.; Buerger, S.P. Achieving Versatile Energy Efficiency With the WANDERER Biped Robot. IEEE Trans. Robot. 2020, 36, 959–966. [Google Scholar] [CrossRef]
- WANDERER. Available online: https://www.youtube.com/watch?v=tIm0muIOc5E (accessed on 20 November 2022).
- Cassie. Available online: https://robots.ieee.org/robots/cassie/ (accessed on 20november 2022).
- Meet Cassie—The Highly Energy Efficient Walking Machine. Available online: https://www.borntoengineer.com/meet-cassie-highly-energy-efficient-walking-machine (accessed on 20 November 2022).
- Cassie Robot Runs Turf 5k. Available online: https://www.youtube.com/watch?v=FSaSjd_HOaI (accessed on 20 November 2022).
- Kim, K.; Spieler, P.; Lupu, E.-S.; Ramezani, A.; Chung, S.-J. A bipedal walking robot that can fly, slackline, and skateboard. Sci. Robot. 2021, 6, eabf8136. [Google Scholar] [CrossRef]
- Mozaffari. S.; Nateghi, M.R. Recent Advances in Solar Rechargeable Seawater Batteries Based on Semiconductor Photoelectrodes. Top Curr Chem (Cham). 2022, 380, 5, 28. [Google Scholar] [CrossRef]
- Tian, H.; Li, Z.; Feng, G.; Yang, Z.; Fox, D.; Wang, M.; Zhou, H.; Zhai, L.; Kushima, A.; Du, Y.; Feng, Z.; Shan, X.; Yang, Y. Stable, high-performance, dendrite-free, seawater-based aqueous batteries. Nat Commun. 2021, 12, 1, 237. [Google Scholar] [CrossRef]
- Yuan, Z.; Duan, Y.; Liu, T.; Zhang, H.; Li, X. Toward a Low-Cost Alkaline Zinc-Iron Flow Battery with a Polybenzimidazole Custom Membrane for Stationary Energy Storage. iScience. 2018, 3, 40–49. [Google Scholar] [CrossRef]
- Xie, C.; Duan, Y.; Xu, W.; Zhang, H.; Li, X. A Low-Cost Neutral Zinc-Iron Flow Battery with High Energy Density for Stationary Energy Storage. Angew Chem Int Ed Engl. 2017, 56, 47, 14953–14957. [Google Scholar] [CrossRef]
- Lee, S.; Ko, M.; Jung, S.C.; Han, Y.K. Silicon as the Anode Material for Multivalent-Ion Batteries: A First-Principles Dynamics Study. ACS Appl Mater Interfaces. 2020, 12, 50, 55746–55755. [Google Scholar] [CrossRef]
- Jiang, S.; Hu, B.; Sahore, R.; Zhang, L.; Liu, H.; Zhang, L.; Lu, W.; Zhao, B.; Zhang, Z. Surface-Functionalized Silicon Nanoparticles as Anode Material for Lithium-Ion Battery. ACS Appl Mater Interfaces. 2018, 10, 51, 44924–44931. [Google Scholar] [CrossRef]
- Zhang, N.; Cheng, F.; Liu, J.; Wang, L.; Long, X.; Liu, X.; Li, F.; Chen, J. Rechargeable aqueous zinc-manganese dioxide batteries with high energy and power densities. Nat Commun., 2017, 8, 1, 405. [CrossRef]
- Ma, Y.; Cui, Y.; Zuo, X.; Huang, S.; Hu, K.; Xiao, X.; Nan, J. Reclaiming the spent alkaline zinc manganese dioxide batteries collected from the manufacturers to prepare valuable electrolytic zinc and LiNi0. 5Mn1.5O4 materials. Waste Manag. 2014, 34, 10, 1793–9. [Google Scholar] [CrossRef]
- Chen, P.; Li, G.R.; Li, T.T.; Gao, X.P. Solar-Driven Rechargeable Lithium-Sulfur Battery. Adv Sci (Weinh). 2019, 6, 15, 1900620. [Google Scholar] [CrossRef]
- Li., L.; Wu, Z.P.; Sun, H.; Chen, D.; Gao, J.; Suresh, S.; Chow, P.; Singh, C.V.; Koratkar, N. A Foldable Lithium-Sulfur Battery. ACS Nano., 2015, 9, 11, 11342-50. [CrossRef]
- Yu, B.; Fan, Y.; Mateti, S.; Kim, D.; Zhao, C.; Lu, S.; Liu, X.; Rong, Q.; Tao, T.; Tanwar, K.K. ; Tan, X; Smith, S. C.; Chen, Y.I. An Ultra-Long-Life Flexible Lithium-Sulfur Battery with Lithium Cloth Anode and Polysulfone-Functionalized Separator. ACS Nano. 2021, 15, 1, 1358–1369. [Google Scholar] [CrossRef]
- Griffith, K.J.; Wiaderek, K.M.; Cibin, G.; Marbella, L.E.; Grey, C.P. Niobium tungsten oxides for high-rate lithium-ion energy storage. Nature, 2018, 559, 7715, 556-563. [CrossRef]
- Chang, U.; Eom, K. Enhancing the Capacity and Stability of a Tungsten Disulfide Anode in a Lithium-Ion Battery Using Excess Sulfur. ACS Appl Mater Interfaces., 2021, 13, 17, 20213-20221. [CrossRef]
- LeThun, M.; Chandran, G.T.; Dutta, R.K.; Li, X.; Penner, R.M. 100k Cycles and Beyond: Extraordinary Cycle Stability for MnO2 Nanowires Imparted by a Gel Electrolyte. ACS Energy Lett. 2016, 1, 1, 57–63. [Google Scholar] [CrossRef]
- US Patent US8206469B2 Battery structures, self-organizing structures and related methods. https://patents.google.com/patent/US8206469 (accessed on 22 Decemer 2022).
- Mikolajczyk, T.; Mikołajewska, E.; Al-Shuka, H.F.N.; Malinowski, T.; Kłodowski, A.; Pimenov, D.Y.; Paczkowski, T.; Hu, F.; Giasin, K.; Mikołajewski, D.; Macko, M. Recent Advances in Bipedal Walking Robots: Review of Gait, Drive, Sensors and Control Systems. Sensors, 2022, 22, 4440. [Google Scholar] [CrossRef]
- Rojek, I. , Dostatni, E., Kopowski, J., Macko, M., Mikołajewski, D.AI-Based Support System for Monitoring the Quality of a Product within Industry 4.0 Paradigm. Sensors, 2022, 22, 21, 8107.
- Dostatni, E. , Mikołajewski, D., Dorożyński, J., Rojek, I. Ecological Design with the Use of Selected Inventive Methods including AI-Based. Applied Sciences, 2022; 12, 19, 9577. [Google Scholar]
- Nowakowski, M.; Kurylo, J. Usability of Perception Sensors to Determine the Obstacles of Unmanned Ground Vehicles Operating in Off-Road Environments. Applied Sciences, 2023; 13, 4892. [Google Scholar] [CrossRef]
- Townsend, A. , Jiya, I. N; Martinson, C.; Bessarabov, D.; Gouws, R. A comprehensive review of energy sources for unmanned aerial vehicles, their shortfalls and opportunities for improvements, Heliyon, 2020, 6, 11, 2020, e05285, ISSN 2405–8440. [Google Scholar] [CrossRef]
- Grodzki, W. , Łukaszewicz, A. Design and manufacture of unmanned aerial vehicles (UAV) wing structure using composite materials, Materialwissenschaft und Werkstofftechnik, 2015, 46 (3), 269-278. [CrossRef]
- Łukaszewicz, A.; Szafran, K.; Jóźwik, J. CAx techniques used in UAV design process. In Proceedings of the 2020 IEEE 7th International Workshop on Metrology for AeroSpace (MetroAeroSpace), 2020, 95-98. [CrossRef]
- Kranjec, B.; Sladic, S.; Giernacki, W.; Bulic, N. PV System Design and Flight Efficiency Considerations for Fixed-Wing Radio-Controlled Aircraft—A Case Study. Energies, 2018, 11, 2648. [Google Scholar] [CrossRef]
- Joshi Dhaval, Deb Dipankar, Muyeen S. M Comprehensive Review on Electric Propulsion System of Unmanned Aerial Vehicles Frontiers in Energy Research, 2022, 10. [CrossRef]
- Pham, K.L.; Leuchter, J.; Bystricky, R.; Andrle, M.; Pham, N.N.; Pham, V.T. The Study of Electrical Energy Power Supply System for UAVs Based on the Energy Storage Technology. Aerospace 2022, 9, 500. [Google Scholar] [CrossRef]
- Mohamed Nadir Boukoberine, Zhibin Zhou, Mohamed Benbouzid, A critical review on unmanned aerial vehicles power supply and energy management: Solutions, strategies, and prospects, Applied Energy, 2019, 255, 113823. [CrossRef]
- Giernacki, W. Minimum Energy Control of Quadrotor UAV: Synthesis and Performance Analysis of Control System with Neurobiologically Inspired Intelligent Controller (BELBIC). Energies, 2022, 15, 7566. [Google Scholar] [CrossRef]
- Rao, J.; Li, B.; Zhang, Z.; Chen, D.; Giernacki, W. Position Control of Quadrotor UAV Based on Cascade Fuzzy Neural Network. Energies, 2022, 15, 1763. [Google Scholar] [CrossRef]
Figure 1.
Selecting main energy source for robot application.
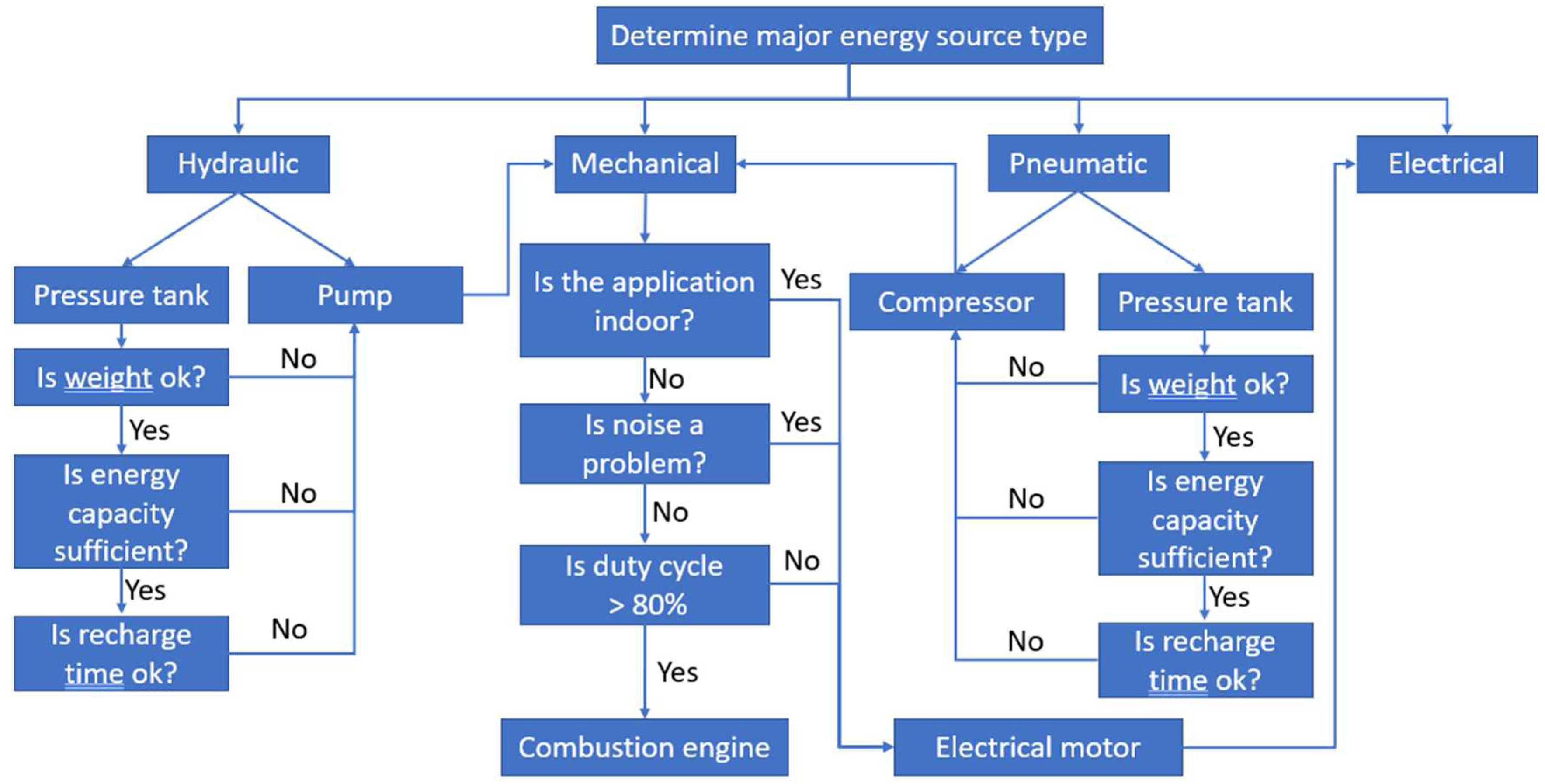
Figure 2.
Selecting electrical system power supply.
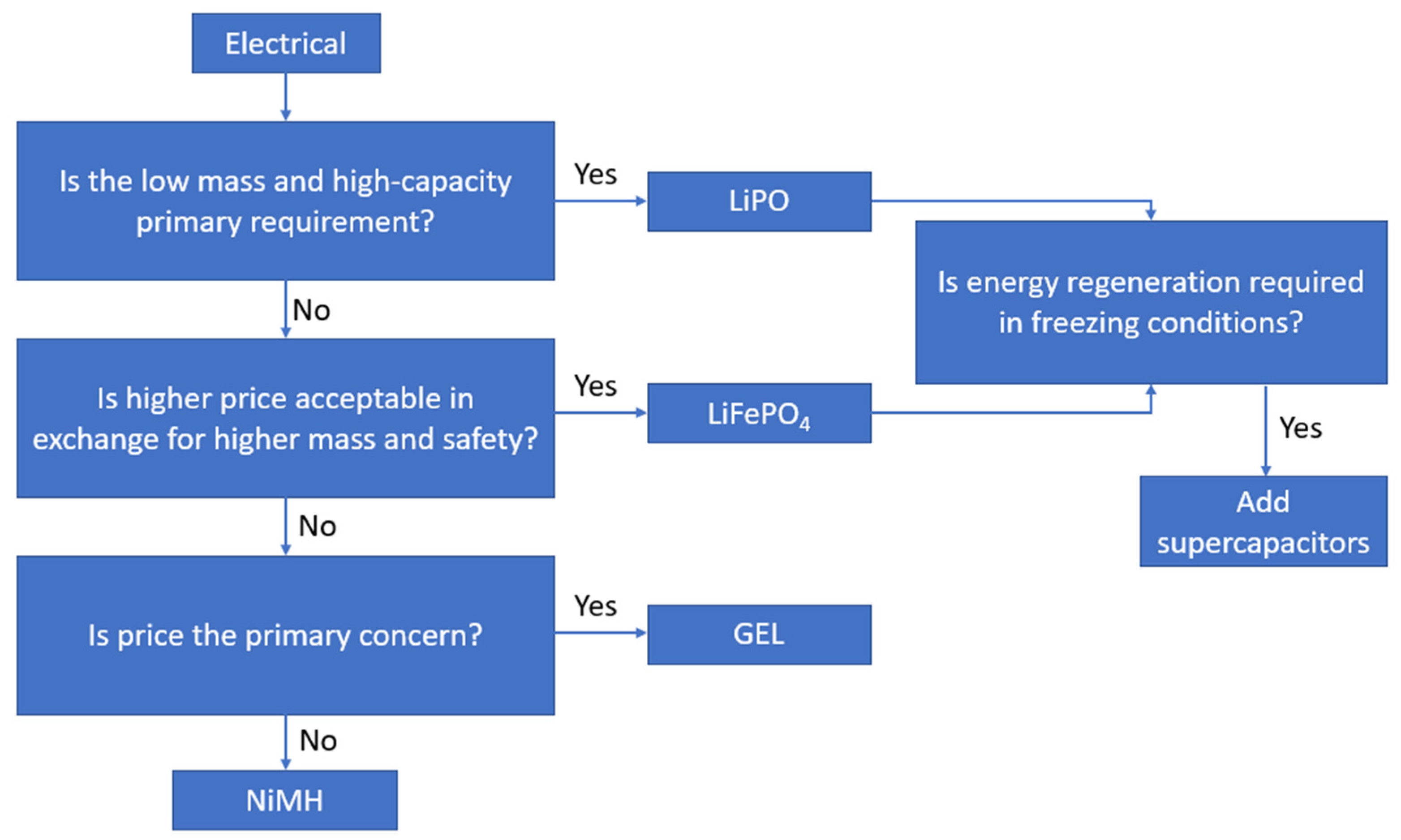

Table 1.
Battery parameters comparison based on its material composition.
| Lead-acid | AGM | Gel | NiMH | LiPo | LiFePO4 | |
| Specific energy [Wh/kg] | 35-40 | 35-40 | 35-40 | 60-120 | 100–265 | 90-160 |
| Specific power [W/kg] | 180 | 180 | 180 | 250-1000 | 245-430 | 2000-4500 |
| Charge current [C] | 0.2C | 0.25C | 0.25C | 1C | 1C | 1C |
| Discharge current [C] | 0.2C | 0.25C | 0.25C | 5C-15C | 5C | 30C |
| Self-discharge per month [%] | 10-15 | 3-4 | 3-4 | 0.08-2.9 | 0.3 | 0.3 |
| Max cell voltage [V] | 2.15 | 2.15 | 2.15 | 1.4 | 4.2 | 3.65 |
| Nominal Cell voltage [V] | 2.1 | 2.1 | 2.1 | 1.2 | 3.7 | 3.7 |
| Min cell voltage [V] | 1.8 | 1.8 | 1.8 | 0.9 | 2.7 | 2 |
| Cycle durability [cycles] | 350 | 500 | 500 | 180-2000 | 500 | 1200-2000 |
| Max discharge capacity [%] | 50 | 20 | 20 | 0 | 3 | 3 |
| Operating temperatures [°C] | -35 to +50 | -40 to +49 | -20 to +45 | -20 to +45 | -20 to +60 | -30 to +80 |
| Charge temp range [°C] | -20 to +50 | -20 to +50 | -20 to +50 | 0 to +45 | 0 to +45 | +5 to +45 |
| Price [€/Wh] | 0.14 | 0.21 | 0.26 | 0.63 | 1.04 | 2.96 |
where: AGM – Absorbent Glass Mat battery, Gel – Gel battery, NiMH – Nickel-metal-hydride battery, LiPo – Lithium-ion-polymer battery, LiFePO4 – Lithium iron phosphate battery.
Table 2.
SWOT analysis of the novel batteries.
|
Strengths high safety light weight long life environmental suitability fast charging |
Weaknesses high variety of solutions various requirements sophisticated technologies |
|
Opportunities self-charging solutions novel more common materials (e.g. salt) LCA recycling |
Threats lack of materials environmental pollution legal regulations |
Table 3.
Features of selected mobile wheeled AMRs equipped with LiFePO4/graphite or Li-ion batteries.
Table 3.
Features of selected mobile wheeled AMRs equipped with LiFePO4/graphite or Li-ion batteries.
| Robots | Battery | Robots description | ||||||
| Name | Manufacturer | Mass [kg] | Voltage [V] |
Capacity [Ah] |
Trun [h] |
Tcharge [h] |
Cycles | |
| LiFePO4/graphite | ||||||||
| Swift | IAM Robotics | 272.2 | 55 | 100 | 10 | - | 3000 | Mobile picking and transport robot [42] |
| Matthews AMR | Matthews Automation | 83 | 25.6 | 20 | 6-8 | 3 | - | AMR for specific tasks like order picking, material transport and more. [43] |
| GR-1500 UPS | Kaze Robotics | 250 | 48 | 60 | 8 | - | - | Robot for automated material handling [44] |
| RA660 Navi XL | CleanFix | 313 | 24 | 120 | 3-4 | 1 | - | Automated cleaning robot for industry [45] |
| RB-Vulcano Base | Robotnik | 750 | 48 | 200 | 10 | - | - | Mobile manipulator for carrying out industrial tasks (payload 1750 kg) [46] |
| Li-ion | ||||||||
| Jackal | Clearpath Robotics | 17 | 24 | 11.25 | 2-8 | 5 | - | Jackal is a small, fast, entry-level field robotics research platform [47] |
| Star-L | Hansrobot | 200 | 48 | 46 | 8 | 2 | - | Mobile manipulation robot with 100 kg payload, and locomotion speed of 1.5 m/s [48] |
| Star-H | Hansrobot | 900 | 48 | 125 | 12 | 2.5 | - | Mobile manipulation robot Payload 600 kg, speed: 1.5 m/s [48] |
| Caster | Iquotient Robotics | 40 | 24 | 40 | 5 | - | - | Caster is a diff-drive indoor unmanned ground vehicle, suitable for research and indoor service [49] |
| AMB-UR5 | Seer | 130 | 48 | 52 | - | 2 | >500 | Collaborative Hybrid Robot UR5 based on Auto Mobile Base AGVs [50] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



