
Submitted:
27 April 2023
Posted:
28 April 2023
You are already at the latest version
Abstract
The purpose of this research is to present a thorough evaluation of the energy management system, which consists of hybrid energy storage systems, and its control algorithms, which may be used in electric vehicles. This paper outlines the characteristics of electric vehicles, research methods, analysis of the hybrid energy storage system architecture, converter topology, and energy management techniques. The strength and co-occurrence of keywords over the past ten years are shown in this study using a systematic research framework for performing a literature review and using keyword analysis techniques. The study reveals a pattern of recently and frequently used terms in works of literature. Consequently, their suitability, benefits, and drawbacks are assessed. In this study, the hybrid energy storage system and converter circuit architecture are evaluated and rated. Non-isolate DC-DC converter converter connected to SC is a suitable configuration for the hybrid converter because it is simple to build, reliable, and has minimal loss/weight/cost, which improves vehicle performance. In terms of the application of control strategies, it is shown that deterministic and fuzzy rule-based control techniques are successfully assessed using real-scale vehicle experiments and selected for manufacturing. On the other hand, real-time optimization-based energy management techniques have been effectively shown in lab-scale tests and may be used in a future real-scale vehicle.
Keywords:
electric vehicle
; lithium-ion battery
; supercapacitor
; power converter
; hybrid energy storage system
; energy management system
1. Introduction
The electric vehicle (EV) is distinguished by two characteristics. The first distinguishing characteristic is its portable energy source or energy storage, which is created by electrochemical, electrostatic, and electromechanical mechanisms such as battery/fuel cell/solar cell, SC, and flywheel. An EV’s second distinguishing characteristic is its electric motor, which generates tractive effort for propulsion [1]. A fuel cell (FC) cannot, in general, receive regenerative power when braking. Furthermore, excessive power demand generates a substantial voltage drop and air starvation in FC [2]. As a result, FC is intended to provide unidirectional power flow to a modest and steady load. In most cases, the battery is employed as a basic source to provide and save regenerative braking with a suitable dynamic response. However, its lifetime can be significantly reduced by supplying and absorbing high current in acceleration and deceleration resepectively. These cause a high internal battery resistance thus reducing the milage and performance of the vehicle.
For supplying and absorbing high repetitive peak power from the propulsion load, an energy storage device such as supercapacitor (SC) should be employed because of its fast response mechanism for storing the energy. The working principle of SC is based on electric charge movement, which is highly reversible permitting it to be charged and discharged easily and efficiently millions of times [3]. Another energy storage for high repetitive propulsion load is flywheel; the energy storage that can supply or receive pulse power by electromechanical means. However, the spinning flywheel is like an explosive device that is inherently dangerous [4]. From this point of view, SC is an applicable solution to buffer high repetitive load of EV propulsion. Therefore, the combination of battery and SC is one of the best promising solutions of hybrid energy storage system (HESS) that provides a good performance in terms of energy and power supply [5].
To manage the HESS, an energy management strategy (EMS) that is consistent with its topology must be developed. According to ISO 50001, the goal of an energy management system is to build an efficient system and take the required actions to improve energy performance [6]. The primary focus of this study is on the energy management system for battery hybrid electric vehicle (BHEV) employing SC: the first is the HESS configuration schemes, and the second is the energy management strategy for the energy storages. These factors motivated us to investigate over the last decades what is the most effective option for HESS employed in BHEV applications.
This research looks at energy management systems for electric vehicle applications that use battery/supercapacitor hybrid energy storage technology. The research approach, as described in Section 2, is presented to provide a defined work phase and processes. In section 3, we looked at several battery/supercapacitor combinations and evaluated their characteristics for application recommendations. Section 4 proposes and explains a converter design for merging SC and batteries in an electric vehicle. Section 5 investigates and tabulates rule-based and optimization-based energy management control systems to establish their applicability in real electric vehicles. The research discussion of major results and conclusions is drawn in the last sections.
2. Research methodology
The research framework for this study is depicted in Figure 1. We classified the most recent work with specified keywords in the subscription and open access online databases of IEEExplore, SCOPUS, and ScienceDirect based on the keywords of “energy management,” “battery/supercapacitor,” and “electric vehicle applications.” The linked literature of 71 papers was carefully picked and analyzed between 2006 and 2023. The selected terms were then entered into a reference management system, which produced a research information system file format for keyword analysis. The VOSviewer program was used to create networks of scientific keywords connected by a co-occurrence link, which is a connection between two terms. The magnitude and strength of the co-occurrence were determined by the size of the word and circle in the result, as illustrated in Figure 2. Following that, the most important with high scores were assessed, as well as their recent appearances in publications, to present prospects and trends.
Figure 2 displays the most essential phrases and their interrelationship during the previous decade. The most recent and co-occurring keywords in the time frame are “electric vehicle(s),” “hybrid energy storage system,” which is not our search phrase, “battery,” and “energy management.” The findings show that the hybrid energy storage system is a hot topic for many researchers, yet it was overlooked in our study. Consider terms such as “design optimization,” “microgrid,” “sizing,” “dynamic programming,” and “battery/ultracapacitor,” to mention a few. These exciting themes may have a high co-occurence for future study due to the advancement of computer technology and electricity generating. “Power control,” “DC-DC power converter,” and “fuzzy logic control,” among others, are of interest for phrases appearing in the middle of the considering period and with medium co-occurence. Some traditional control algorithms and converters were still being studied by researchers for the HESS use in EV. As a result, we can effortlessly link the trend of these influencing keywords with our study topic. However, because we are concentrating on the most important technologies for electric vehicle applications in our work, the hybrid energy storage system and energy management are limiting considerations.
3. Battery and supercapactior in hybrid energy storage system
The combination between the battery and SC produces an excellence energy storage system for improving EV performances in terms of battery stress reductions and utilization of regenerative braking energy [7],[8]. There are several possible configurations of hybridization between the battery and SC as presented in [9,10]. Figure 3a shows the direct parallel connection of the two energy sources supplying the propulsion unit. This configuration permits SC voltage, , to vary according to the battery voltage, ; the power flow is proportionally shared depending on their internal resistances. This configuration is easy to implement, but the utilization of SC is low by the stiff DC bus [11]. Figure 3b shows the direct parallel connection of two energy sources to a bi-directional DC-TO-DC converter supplying to the propulsion unit. This configuration maintains DC bus voltage,, and the inverter efficiency. However, the SC stored energy is inefficiently discharged because of its small operating voltage range due to the small variation in the state of charge (SOC) of the battery. In addition, this scheme uses a full size converter to manage the whole power [9,12]. The reliability of this HESS mainly depends on the converter. To control power flow of the SC, a converter is used to connect it to the DC bus, as shown in Figure 3c [11,13,14,15,16,17]. This scheme improves the battery performance in terms of reducing battery peak power, DC bus voltage variation and battery energy consumption with the help of SC [18,19]. However, it requires a medium size converter for managing power flow of the SC. To avoid the large size of SC’s converter, Guidi et al. [20,21,22] introduced the configuration as in Figure 3d. This configuration separates SC into two banks, SC_0 and SC_1, but controls only one of them. Thus, converter capacity and losses are lower than the previous configuration, since the active components of the converter are half size and the inductor is one third smaller. However, the total voltage of both SC bank is higher than DC bus by two times, hence, this requires dynamic balancing circuitries for managing SC voltage, which are expensive and complex. In terms of reliability, configurations in Figure 3c,d)provide higher reliability than that in Figure 3b, whereby if the converter of SC fails, the vehicle still can be operated. This is due to the fact that the major energy source, the battery, is directly linked to the motor’s inverter and does not rely on any DC-DC converter.
By modifying the energy storage system as shown in Figure 3e converter capacity can be minimized [23]. In this configuration, the battery supplies average power to the load once SC voltage is higher than battery voltage, otherwise, the battery will forward bias the diode, and the battery power will be discharged sharply to the load. The major disadvantage of this scheme is the large DC bus voltage variations with SC voltage [24]. In addition, the large variation of DC bus voltage causes high losses in the propulsion inverter. However, this configuration improves the battery performance if it is not discharged through the diode frequently, and it has equal reliability as the two previous schemes. To overcome the problems of large DC bus voltage variation, configurations in Figure 3f,g have been reviewed by [17,24,25]. These schemes require a medium and a full-size converter for each source to provide dynamic power with steady DC bus voltage, therefore, the incremental cost, weight, and loss are highest among other schemes. Moreover, the losses in the two converters can be traded off with the improved propulsion inverter efficiency due to the stabilized DC bus voltage. On the downside, their reliability is lower than those in Figure 3a and Figure 3c–e; if one of the converters damages, the vehicle might be inoperative. To control the energy and power of battery and SC, multi-converter is proposed by scholars as shown in Figure 3h [26,27,28,29]. This configuration presents a steady DC bus voltage and protects the battery from high repetitive power. However, the disadvantages are like the configuration in Figure 3f,g. In an EV application, the HESS should have the most reliability, less complexity, low weight, low loss, and low cost to enhance the vehicle performance. These are the reasons that the configuration in Figure 3c is widely used by many researchers and manufacturers for hybridizing the SC to the battery.
The authors provided ratings to any topology for a more thorough selection based on converter size, DC bus voltage stiffness, and reliability. Table 1 shows the scoring of each converter’s topology, with configuration (d) receiving the best score due to the lowest size of SC converter, DC bus voltage stability according to battery voltage, and excellent reliability even if the SC and its converter fail. However, the converter in type (c) gets a lower score despite having a bigger SC converter size but the same DC bus stiffness and reliability as type (d). However, as previously said, this design has been allowed for EV application, even though it did not achieve the best score in this study, but the advantages include reduced weight, cost, and loss when compared to the configuration (d).
4. DC/DC converter topologies for energy source
The design of DC-TO-DC converters to control energy or power sources for the BHEV energy management system is an exciting and hard task [30]. Firstly, the power converter holds hundreds of amps of current while working at a low operational voltage, often 300 V DC or less. Through the time-varying voltage ratio, these huge currents can raise the electric and thermal stresses in the active and passive components and lower the converter efficiency. As a result, active and passive component ratings are increased even further. Secondly, the stress and huge component sizes combined with EMI emissions make the converter packaging challenging, costly, and bulky. Therefore, it is necessary to build a converter for an EV such that it has the qualities of being compact, light, inexpensive, and having minimal losses.
The non-isolated bi-directional DC-TO-DC converters are suitable choices among converter topologies. Non-isolated bi-directional converters are favored because they are lighter than isolated bi-directional converters, which have an extra transformer mass. The half bridge converter is acceptable in the category of non-isolated bi-directional DC-DC converters because they meet the EV converter design requirements. The key benefits of the half-bridge converter over the CUK and combination SEPIC/Luo converter are that (1) it only requires one inductor (L) instead of two, and (2) the inductor size is half that of the CUK and combined SEPIC/Luo converter. The most notable conclusion is that the half-bridge converter is more efficient than the CUK and combined SEPIC/Luo converter due to decreased inductor conduction loss, switching losses, and active component conduction losses.
However, several academics investigated the development of an interleaved three-leg full-bridge DC-DC converter [13] and a modified SEPIC/Luo converter [31]. The former has the capability of reducing the inductor current ripple [32] while the latter has the good regulation capability, continuous input current, and low EMI. Interleaved three legs full-bridge DC-DC converter also has lower source current ripple and easier to control in both buck and boost modes of operation compared to the conventional SEPIC/Luo converter [31]. Nonetheless, both need a huge amount of active and passive components, resulting in a bulky, high mass, high loss, and high cost when compared to a half-bridge converter. Moreover, these works [13,31] were in the simulation and experimental scale while the half-bridge converter was proved its suitability for application in the real and commercial vehicle with an appropriate weight, low cost and low losses [61,66]. However, the main drawback of the half-bridge converter is the discontinuous output current once operating as a boost converter; this requires a large size of the output capacitor (Half-bridge converter connected to SC for hybridizing to the battery is shown in Figure 4.
The half-bridge converter operates as a boost converter when power flows from the SC to the load. The boost switch, is activated according to the switching duty cycle produced by the controller together with the boost diode, The buck switch, , will take the complementary duty ratio of for operation with the buck diode, . Unlike previous works that separate control of converter in buck or boost mode according to the mode of operations [17], in this work, the duty ratio governs the half bridge converter to operate in buck and boost mode complementarily depending on the load demand; the smooth operation can be achieved [34,35,36].
5. Energy management strategies for EV applications
In general, the EMSs for EV or hybrid EV (i.e., pure battery EV, battery/SC hybrid EV, battery/fuel cell/SC hybrid EV, and a hybrid EV), can be classified into rule-based and optimization-based strategies [36,37] as shown in Figure 5.
The EMSs have been intensively developed by many institutional researchers involving various aspects, such as the state-of-the-art of the control strategy, general characteristics and control performances. This section provides a qualitative review of the EMSs.
5.1. Rule-based energy management strategy
Rule-based energy management strategy is a heuristic real-time energy management control strategy in which human expertise, engineering perception, and the load characteristics are used to design a rule set. This kind of energy management control strategy does not require a prior knowledge of predefined driving cycle; it is computationally efficient and simple to implement. It has been broadly used in manufacturing vehicle and academic research [38,39,40]. The control performance of rule-based energy management control strategy relies on the initial conditions and rules. Nonetheless, the exact initial conditions and rules themselves are the main problems that require large numbers of mathematical analysis and theoretical foundation. To find appropriate parameters, comprehensive calibrations and modifications are required in order to improve the control performance for a specified EV characteristic and driving cycle. Therefore, the development of rule-based energy management control strategy is protracted and dependent on the specific characteristic of the vehicle and driving cycle [40]. Furthermore, no optimization techniques are related to this strategy, thus the optimal solutions are not guaranteed. This control strategy can be divided into deterministic rule-based energy management control strategy and fuzzy rule-based energy management strategy as presented in the following descriptions.
5.1.1. Deterministic rule-based energy management strategy
Deterministic rule-based energy management strategy for battery hybrid EV can be subdivided into power follower (load follower) control strategy [30,31,32], frequency-based (power split) control strategy [42,43], and adaptive power split control strategy. In battery/fuel cell hybrid EV, battery/fuel cell is used as the main energy source while SC is availed as the auxiliary energy storage. In 1999, Faggioli et al. [44], proposed the implementation of SC connected to a bi-directional DC-DC converter for buffering peak power in battery/fuel cell hybrid EV. The energy management control strategy employed the energy conservative law between vehicle kinetic energy and stored energy inside SC and controlled all energy sources following the specific rules. However, the best solution appeared in fuel cell EV testing with the ECE-15 urban driving cycle that consumed the energy stored inside SC of about 37%, which lead to the inefficiency of utilization the energy stored in SC.
Dixon et al. [45,46] used the energy conservative theory for the vehicle kinetic energy and the SC stored energy to increase the transient performance of the BHEV, and the lifetime of the battery. From this principle, peak power discharge and recharge of the battery are avoided by the hybridization of battery and SC. In these papers (as mentioned above), the cascade control of SC charge (outer loop) and SC current control (inner loop) is used. The SC charge control is compared with the SC charge reference, which is generated from the reference charge curve considering vehicle speed and battery state of charge into account, with the actual SC charge. The reference charge curve allows the SC to be charged at a low state of charge if the battery is fully charged. Thus, the energy stored in SC is inefficiently utilized. Moreover, the generation of time-varying SC current reference, , is not robust where the current reference is bounded by the current bandwidth limiter. The current bandwidth is obtained by multiplying the specific voltage gain between battery voltage, , and SC voltage, , with the difference between the time-varying actual load current,, and the maximum battery current, . The SC current reference generation is given by the following equation [46].
Thounthong et al. [42,43] proposed energy management of FC/battery/SC hybrid power source for hybrid EV applications that manage the energy exchanges between the sources and the propulsion load (not consider power losses). The three control strategies used are: (1) charge mode, when the FC supplies energy to the battery and SC and to the load, (2) discharge mode, when FC, battery, and SC supply energy to the load, (3) recovery mode, when the load supplies energy to the battery and SC. In the discharge mode, DC bus voltage is regulated by SC current that is generated by means of energy and power calculation. The SC current reference is limited by its limitation function. This limiter is developed based on human-expert in finding an appropriate working point, so comprehensive calibration and tuning to find the suitable point are required. With this algorithm, the control processor is loaded with energy and power calculation. In fact, a stiff DC bus voltage can be obtained by directly controlling of SC current and DC bus voltage as proposed in [47], [29] instead of power and energy respectively. In addition, the evaluation of energy source capacity and testing with a standard driving cycle, which is the essential tasks to prove the effectiveness of the control strategy and energy economy, had not been executed. The SC voltage was decreased by only 8% due to the improper size of the SC thus ineffective utilized the stored energy in the SC. Moreover, the advantage in terms of energy consumption for the driving cycle supplied by FC had not been considered, therefore, the effectiveness could not be fully confirmed; whether the energy supplied by the HESS is lower than a single source. Moreover, the battery is still repeatedly charged by FC, therefore the battery life could be reduced.
Wong et al. [29] improved the control strategy processing by controlling the voltage and current of fuel cell/battery/SC for a power-sharing in the hybrid EV instead of controlling power and energy of each source. The strategy uses three algebraic current algorithms to manage the current of each source so that the DC bus is fixed. The results of this work show that SC can supply transient and steady state current instead of battery and FC until the SC voltage reaches the minimum voltage limit, then FC and battery take over the load instead. The function of the battery is to support during vehicle start-up period when the other sources are not ready. However, the method of evaluation SC size has not been mentioned therefore the energy stored in the SC is inefficiently utilized. Moreover, the proposed system had not been tested with a standard driving cycle to confirm implementation in real-world driving.
An advanced energy management system for controlling the SC is proposed by Armenta et al. [14] by utilizing the energy conservative law between the vehicle kinetic energy and the SC stored energy. The control strategy is to discharge SC based on the minimal power delivered to the load, to give enough space for absorbing regenerative braking energy. According to this strategy, excessive discharge power from the battery is prevented, and a new driving cycle can be started naturally, even though the vehicle requires a high acceleration. The principle of the control strategy is by substituting the square of speed in vehicle kinetic energy equation with the fundamental speed equation, so a new vehicle kinetic energy equation can be derived, and the instantaneous ideal power supplied by SC is achieved by the differentiating the energy. The SC power is then discretized for controlling power by considering charge/discharge losses of vehicle transmission system. This power uses discrete control in three strategies: acceleration strategy, cruising strategy, and braking strategy. The simulation results show that the proposed control strategies can reduce battery peak power and enhance driving range. However, the simulation results of the three ideal driving cycles are not practical whereby the regenerative braking power is sufficient for charging SC until it is full, without requiring any support from the battery [34]. In general, the amount of energy supplied by SC to the vehicle in acceleration is higher than the regenerative braking energy recovered whereby it is dissipated into the powertrain system forth and back. Thus, the regenerative braking energy alone is not enough for recharging SC until it is full.
Wangsupphaphol et al. [48] has presented a simple HESS and SC current control approach for electric vehicle applications. Instead of managing SC power, SC current control is significantly simpler and more effective for reducing battery power and energy usage. The contribution is to relate the SC current reference to vehicle acceleration or deceleration, allowing SC current to regulate vehicle dynamic power. In addition, SC capacity calculation has provided in this work because of the heavier the SC mass the larger power and energy consumption, which most of the HESS studied in the past has ignored. This design philosophy was highlighted in a Japanese automobile manufacturer’s U.S. patent application. However, this work was limited by the real-vehicle experiment to prove the actual effectiveness of the proposed strategy.
Another deterministic rule-based energy management strategy termed as fixed-frequency power split has been proposed and validated by real-time simulation in [8]. In this control strategy, the current required from the battery is reduced by the assisting current from SC, however, the battery is still charged by the shallow negative current in braking phase even though the deep negative current is absorbed by the SC. This can reduce the battery lifetime.
A novel adaptive power split strategy for an EV was proposed in [26] whereby the load power is filtered as high and low frequency supplied by SC and battery respectively. Two bi-directional DC-DC converters had been used for interfacing battery and SC to DC voltage bus. The control strategies deal with voltage and current instead of energy and power, so the computational effort is reduced. However, slow changing of filter’s time constant of the proposed adaptive splitter allows the battery to supply high-frequency power instead of SC once the SC has low energy, thus can damage the battery rapidly. Moreover, the slow dynamic of SC voltage control loop, generated by the adapter, causes SC voltage exceeding the upper limit, which may jeopardize safety and not suitable for EV applications.
Kalman filter used for power splitting EMS in tuk-tuk EV was proposed by Karunarathne et al. [49]. The converter for SC and battery is used thus the power of them can be control properly. The power split technic can save battery SOC and SOH thus improve driving range. Though, this is inevitable trade off with the complex control structure and weight of the converters which are the crucial important for EV applications. In addition, SC capacity calculation was not declared thus the effectiveness of energy reduction may be doubted.
5.1.2. Fuzzy rule-based energy management strategy
Fuzzy rule-based energy management control strategy is an extended type of the deterministic rule-based energy management control strategy. The principle of this control strategy is to develop a group of fuzzy rules (IF-THEN) from human knowledge and cognition whereby the mathematical model of the system is not necessary. The core benefits of fuzzy rule-based energy management control strategy are its robustness to noise and variation in component parameters. Nevertheless, membership function and fuzzy rule are generally derived from human expertise and cognition; hence a noble control performance cannot be guaranteed. The performance of fuzzy logic control mostly relies on the designer’s expertise. Fuzzy rule-based control strategy implemented in EV power source control can be grouped into two categories: conventional fuzzy logic control and fuzzy sliding mode control.
Wang et al. [50] proposed the conventional fuzzy logic control for controlling SC which are connected parallel to the battery main energy storage for improving the energy recapture efficiency and extending the driving range. The fuzzy control strategy employs load power, SOC of the battery and SC, to determine the proportion of the power from the battery to supply the load. The simulation results, implemented in ADVISOR 2002 and compared to the traditional logic threshold strategy, show that the proposed fuzzy logic control can reduce battery peak power and improve the energy recapture efficiency by 50% and 10% respectively.
Xiaoliang et al. [51], proposed the frequency decoupling method to manage the power of SC. The conventional fuzzy logic control is implemented to manage the energy contents inside SC while the battery is passively controlled. The driving cycle, road conditions, and load current are used as the fuzzy input variables and then processed by using state flow in MATLAB to produce SC current reference. The experimental results tested with the ECE-15 driving cycle show that the lower of decoupling frequency allows the higher SC energy supplied to the load. However, the intuitively optimum decoupling frequency is unknown but must be determined based on human expertise. Thus, the minimized battery’s energy consumption cannot be confirmed. The low decoupling frequency causes the battery to recharge the SC in deceleration with the regenerative braking power, even though the battery supplies less power in acceleration.
Zandi et al. [52] proposed the conventional fuzzy logic control for controlling battery and SC which are parallel with FC main energy source. The fuzzy rules, established from SC, battery voltage, and load power, are designed to manage the energy and power contents inside battery and SC in any operating modes, i.e., recovery, normal, and overload cooperative working with FC. Three DC-DC converters for FC, battery, and SC are employed. Three different controllers are employed: the state feedback controller (for FC control), the fuzzy logic controller (for SC and battery control) and sliding mode controller (for switching control). The experimental results show the perfection of high dynamic power from SC and battery to assist the FC power, moreover, DC bus voltage is always steady even if facing a sudden step load. However, the complexity and high computational requirements processing these controllers cannot be avoided.
Cao et al. [53] proposed fuzzy sliding mode controller which combines the benefits of fuzzy control and sliding mode control. The control objective changes from tracking error to sliding mode function by creating S-Function incline to zero. Since the fuzzy sliding mode control could soften the control signal that reduces the chattering happening in common sliding mode control, so the robustness is improved. In the experiment, the fuzzy sliding mode control is compared with the PID control; and the results show an improvement in energy saving, faster response and more reliable performances achieved by the fuzzy sliding mode control.
Li et al. [54] proposed a hybrid power system that composed of an FC, battery, and SC for a tramway power supply. The energy management control strategy is based on a combination of fuzzy logic control and Haar-wavelet transform. The energy management control strategy can reduce transient peak power demand while maintaining high-efficiency mechanism performance of FC. The results show that the proposed energy management control strategy can split the main positive high-frequency power from FC. The battery will respond to the medium frequency power while the high-frequency power is supported by SC.
5.2. Optimization-based energy management strategy
The general characteristic of optimization-based energy management control strategy is the optimization of EV system performance cost function, which is described numerically, by different optimization control methods. The development of several cost functions means the diversities of optimization control problem. Therefore, several optimization-based energy management control strategies are presented for solving the varieties of optimal problems. There are two major optimization-based energy management control strategies suggested by scholars: global optimization energy management control strategy and real-time optimization energy management control strategy. They are described as follows.
5.2.1. Global optimization energy management strategy
This energy management control strategy is established on a global optimization method to find a global optimum solution by minimizing a cost function such as fuel economy, emissions of a specified driving cycle considering the constraints of HESS, and propulsion motor and converter. This method depends on prior knowledge of the specified driving cycle; therefore, it can be named as an offline optimization. Additionally, the computational requirement of the global optimization energy management control strategy is greater than that of the rule-based energy management control strategy.
Presently, the classification of optimisation control problem of EVs has three major solutions.
- Firstly, the optimisation of the parameters of a rule-based energy management control strategy. By this method, the energy management problem turns into a parameter optimisation problem, and it is called a static optimisation problem. Thus, a derivative-free static optimisation method can be implemented, i.e., genetic algorithm (GA), particle swarm optimisation (PSO) and simulated annealing (SA). In addition, a derivative-based static optimisation method such as sequential quadratic programming (SQP) can also be applied.
- Secondly, the energy management problem of EV applications is considered as a dynamic, nonlinear, and constrained optimisation problem. This is recognised as an optimal control problem. The optimisation problem can be determined by dynamic optimisation methods such as dynamic programming.
- Thirdly, the optimal control problem is approximately modelled as a mathematical problem. After that, the problem is solved by static optimisation methods such as SQP.
- Both static and dynamic optimisation methods have been utilised in optimisation control problem of EV applications, which are described as follows.
5.2.1.1. Static optimisation method
The calculating methods of the static optimisation problem can be classified into two groups: derivative-free methods and derivative-based methods. The derivative-based methods such as SQP use the derivative of the objective function to solve the optimisation problem. This method is implemented in the optimisation of energy management control strategy parameters of an EV [55].
Dellnitz et al. [56] implemented this technique in an EV for the purpose of extending driving range by minimising battery’s SOC and velocity variation. The principle of SQP is to sequentially formulate auxiliary quadratic problems for approximating a locally optimal solution to the original problem, which is the main drawback of this method. The requirements of the SQP for achieving a locally optimal solution in this work are the strong assumptions of cost or objective functions, discretization point, and initial guess (minimized value of velocity variances). Otherwise, the SOC of the battery is highly consumed according to the compared results in this work. However, the SQP still has some minor problems such as discontinuous numerical processes that are caused by look-up tables, and the solution can be trapped in a local minimum. Therefore, for better performance of numerical optimisation methods, a derivative-free optimisation method that can find the global optimisation solution with respect to several different objectives, could be applied.
The derivative-free and stochastic search methods outperform the derivative-based methods in terms of searching global optimal solution within the specified design space. These methods find an optimal solution by iteration instead of depending on the derivative and typically applied to solve a number of complicated engineering problems that are nonlinear, multimodal, and non-convex objective functions [57]. Because of their global optimality and robustness, these methods are suitable for optimal control problems of EVs as described in [57,58,59,60]. The methods which are classified under this category and applied to EVs are, for example, genetic algorithms (GAs), particle swarm optimisation (PSO), and simulated annealing (SA).
Jain et al. [61] applied an exclusive non-dominated sorting genetic algorithm (NSGA-II) to find the optimal solution of an FC/battery/SC hybrid vehicle. The NSGA-II provides the ability to optimise 8 variables to receive 2 minimised global solutions; (1) fuel economy and (2) fuel cell and battery cost. The simulation result of the vehicle running with given driving cycle shows that both objectives can be achieved, especially fuel economy is greatly improved. However, the best solutions in this work are not only dependent on the great population size but also on several generations, and this is the main disadvantage of the GAs that requires high performance of processor for a proper convergence processing period. In addition, the solutions are well suited to the driving cycle tested only, the inherent characteristic of the offline optimisation.
The PSO concept started as a simulation of simple community systems such as flocks, fish, or birds. A PSO system begins with an initial population of random individuals, indicating solutions of a problem, then assigning the random velocities. Ren et al. [58] proposed a mutual PSO-wavelet-transform based power management for PEMFC hybrid EVs which comprising of a PEMFC, lithium-ion batteries, and SC as the HESS. To decouple the high frequency of load power, the wavelet transform is utilised, and this power is maintained by SC for extending the battery and fuel cell lifetime. The PSO is implemented to optimise the parameters of the PID controller. Simulation results show that the proposed method can separate the high-power frequency for supplying SC while the battery and FC supply to the medium and low-frequency power respectively. However, the disadvantages of the PSO relies on the selection of the constants in the updating velocity and initial random population and easy to get trapped in local optimal solution [36].
SA is the method for searching the global optimal solutions without covering entire design space. It has the processing time faster than neural network technique and genetic algorithm in finding a quasi-optimal solution. However, the performance of SA depends on tuning parameters [36]. Chen et al. [62] used simulated annealing method and quadratic programming to find the optimal battery power supplied in a series plug-in hybrid EV by solving the quadratic equation of fuel consumption rate. The SA method is utilised to decide the engine on-off based on battery power, vehicle speed and drive power. For the period of iteration, the interior point method is used to solve the proposed quadratic programming problem to decide the optimal battery powers. The simulation results run in the program namely Autonomie, which is developed by Argonne National Laboratory, demonstrate that the proposed method can reduce fuel consumption with a smooth gradual decrease of battery SOC, thus the battery lifetime could be extended.
5.2.1.2. Dynamic optimisation method
Dynamic programming is an optimisation method which has the ability to obtain a global optimal solution of power control in EVs for a specified time horizon of driving cycle if it is known in advance. It finds the optimal solution for nonlinear dynamic systems. The dynamic programming method extracts the dynamic optimisation problem into many groups of the problem by discretizing and calculating backwards from the final state to the initial state (prior knowledge), for establishing a cost-to-go function at every sampling time. The main disadvantage of dynamic programming is the extremely complicated processing of quantization and interpolation, which necessitates the use of high-performance computers. The global optimization energy management control strategy requires the completely prior knowledge of driving cycle while in real world driving, this is not possible. However, it is possible to apply this method in real-time by recognizing and classifying the driving pattern together with the use of rule-based energy management control strategies [36,63].
5.2.2. Real-time optimisation energy management strategy
As aforesaid, the global optimisation control strategies are not suitable and viable for real-time control implementation. To achieve the real-time energy management control strategy, the instantaneous cost function must be defined by considering the variations of electrical energy consumption compared to fossil fuel energy consumption. As a result, the real-time optimisation control technique requires less computer speed and memory to implement. Neural networks and model predictive control approaches are well-known and commonly used technologies for EV applications. Recently, the reinforcement learning (RL) technique has become prominent in the regulation of an EV’s energy system.
5.2.2.1. Neural network control strategy
The neural network is a human brain emulated control system that finds the solution using reason judgment based on the qualitative and quantitative of the system input information. This control method is considered an intelligent control system, and it is suitable for a nonlinear complex system. Because of this characteristic, the neural network is widely used in EVs by many researchers. Although this technique does not need exact powertrain models, creating and updating a comprehensive database for system learning is difficult and time-consuming. In addition, structure sizes of the database directly affect the computation time and performance of the controller. Moreno et al. [17] proposed the use of optimal neural network control for SC that is hybridised with the battery in an EV. The battery was considered as a passive element whereby its current was controlled indirectly by observing the load current and controlling of SC current instead. The dynamic equation of battery and SC energy are state variables of the system, and they were minimised in the optimisation process by the gradient method. The method for solving the dynamic equations of the system is to perturb the variable of control system for every single iteration. In this manner, the physical reaction occurred in the optimisation process can be noticed at each single time step. The simulation results show that as the SC current injected to the load, and the battery current is significantly reduced. This can save battery energy consumption by 28.7 % compared to the case of the battery alone EV. This is due to the SC’s high receptive performance to absorb the whole regenerative current from the vehicle kinetic energy. However, the energy inside SC has not been utilised effectively because of the improper calculation of SC capacity.
Ortúzar et al. [16] implemented neural networks to control SC as an auxiliary energy source in a battery EV, Chevrolet mini truck. The control algorithm made of two heuristic rules; the first rule states that the energy content in the SC must be inverted to the vehicle speed. Therefore, at the maximum speed, the stored energy inside SC should be low and vice versa. The second rule is the limits of SC current that extracted from the batteries. These current limits change automatically when the battery is fully charged to avoid overvoltage during regenerative braking. Because the first rule is complementary to the second rule, the second rule was developed by using optimisation tools after that the first rule is derived. The efficient SC currents are evaluated using optimal control techniques, then numerous sets of the most efficient current drawn from SC supplying to the load are used for training the neural network. However, varieties of SC currents result in varieties of battery currents; therefore, the most efficient set of SC currents must be found within the allowable operating area of SC’s SOC. Tests are carried out under four different conditions: (1) battery alone without regenerative, (2) battery alone with regenerative, (3) battery with SC using rule-based control, and (4) battery with SC using optimal-based neural network control strategy. The results show that the main benefits of the proposed strategy are energy saving, the lower battery voltage swing, and no regenerative currents return to the battery. The neural network control strategy increases the energy efficiency of the system and protects the battery from damage. Moreover, in the economic perspective, it is possible to combine SC in the battery EV where the cost is higher than 8.3% compared to the pure battery (lead-acid) EV. However, if the main energy source is fuel cell and combined with SC, the total cost will be dramatically decreased by 33.7% compared to the pure battery (lithium-ion) EV.
Samanta et al. [64] applied PSO and GA as training algorithms to train radial basis function neural network (RBFNN) namely GA-trained radial basis function (GRBF) and PSO-trained radial basis function (PRBF) for the energy management control strategy used in a hybrid EV. Because of the artificial neural network (ANN) control strategy has the limitations in terms of large complication and traps in local optimal solution, the radial basis function (RBF) network control strategies which process on the single hidden layer are implemented to find a global optimal solution. Nevertheless, there are still some problems building RBFNNs. In GRBF and PRBF, GA and PSO are used to find the central of the hidden neurones, extent, and bias parameters by minimising the mean square error (MSE) of the desired outputs and actual outputs. The verification of the PRBF and GRBF approach was proved by simulation of a commercial hybrid EV running in New European Driving Cycle compared to the other conventional artificial neural network control strategies. The simulation result demonstrates that PRBF consumes the lowest energy, however, it takes the longest runtime to acquire a solution, which is the disadvantage of the optimisation technique.
5.2.2.2. Model predictive control strategy
The model predictive control strategy is a well-known control strategy that has been used in industry to cope with multivariable constrained of the control system problems. This control normally consists of three steps. Firstly, minimise the cost function that subjects to the constraints in predicted time horizon optimally. Secondly, implement the optimal solution to the physical plant. Lastly, move the entire predicted horizon one step forward and repeat step 1 [36]. Unlike dynamic programming, model predictive control is a time receding horizon control strategy that works in real-time. It has the potential to decrease computational load and can be implemented in a real EV. Since it has the characteristic of receding horizon in nature, the model predictive control strategy can adapt to the differences of propulsion load profiles in driving cycles. Nonetheless, the upcoming driving cycle information must be known in advance by predicting or recognising. Based on its orientation characteristic, model predictive control can be categorised as linear time-varying control and nonlinear control. Thus, the linearization of nonlinear systems and constraints is used where it can reduce computational processing. However, the system model error that is due to the linearization is the obstacle for the vehicle to enhance energy saving [65]. Since model predictive has the capability to predict torque demand, it can be categorised into two subcategories: (1) model predictive control based on navigation technology, and (2) model predictive control based on a mathematical prediction model. The optimisation performance of the former case depends on the accuracy of the road information received from a global positioning system (GPS) or vehicle sensors. The quality, reliability, and stability of GPS system and the peripheral vehicle sensor equipment are the keys to assure real-time control system performance where their cost is very high. To solve these problems, the model predictive control based on the mathematical model has been proposed and it drew the attention of relevant researchers [66].
5.2.2.3. Reinforcement learning control strategy
For the real-time EMS of the BHEV (battery/fuel cell/SC), Wang et al. [67] developed a deep reinforcement learning control strategy. The amount of training acquired by the RL-based EMS influences its performance; the more training received, the more controlled the supplementary power source is. Furthermore, the RL-based technique still needs a thorough understanding of the driving cycle, and the environment may be different from that of the training scheme. The simulation results in this paper show that the method can enhance driving range while decreasing power source life loss. However, the converter’s mass may restrict the driving range, raising concerns regarding energy savings. Without validating the same cycles, comparing the findings to the real-time rule-based EMS at the small or actual scale might be challenging. In the actual world, rule-based EMS remains a strong assumption for many types of driving cycles. Table 2 summarizes the features of several EMSs. The bold letters emphasize recent work by three EMSs that are still being evaluated for EV applications.
6. Discussion on major finding of energy management strategies
Rule-based energy management strategy and optimization-based energy management control strategy have their own characteristics and applications. Rule-based energy management control strategy is the control strategy that has been widely used by commercial vehicle makers due to simplicity and feasibility, in terms of implementation, which is not possible with optimization-based solutions. Therefore, the optimization-based energy management control strategy is proposed to overcome the drawbacks found in the rule-based energy management control strategy by means of optimisation control approach. The optimization-based energy management control strategy can find a global optimal solution; however, its disadvantages are the requirement of high computer performance and the future knowledge of the driving cycle. The compromised solution among the two-prior mentioned strategy is the real-time optimisation. The real-time optimisation energy management control strategy is developed and proposed by many researchers for years. It is a combination of the advantages gained from rule-based and optimization-based energy management control strategies. It is based on finding a sub-optimal solution that improves the performance of the rule-based energy management control strategy by using future road information supplied by the GPS and vehicle sensors. However, the global optimal solution cannot be assured and high-performance processors, as well as high precision road information, are required. Real-time optimisation energy management control strategy for hybrid energy sources is still under developing stages, and not ready for commercialization yet.
7. Conclusions
The energy storage for electric vehicles is one of the most critical components in comparing the performance of electric vehicles to traditional gas vehicles. This paper examines the effectiveness of HESS of battery and supercapacitor to overcome the obstacles that found in pure battery EV such as battery life degradation and power decreasing by the increased internal resistance and temperature during years of use. The conclusions of significance of research are as follows.
- The finding declared the significance of HESS for EV in terms of performance, cycle life, and controllability via DC-DC power converters among literatures and scoring for a suitable configuration for applications.
- A review on non-isolated half bridge bi-directional DC-DC converter is proposed for smooth operation based on the limitations of low weight, low cost, and low loss with good dependability.
- The evaluation of the energy management strategies where we found the rule-based real-time control is an acceptable solution for vehicle manufacturing. However, the performance of real-time optimization strategy is acknowledged and has a good prospect unless th economy of scale is established.
Author Contributions
Conceptualization, A.W., N.R, A.J, N.D., S.P.; methodology, A.W., N.R., S.P.; validation, A.W., N.R., A.J., S.P.; formal analysis, A.W., N.R., S.P.; investigation, N.D., S.P.; resources, A.W., N.D.; data curation, A.W., N.D.; writing—original draft preparation, A.W.; writing—review and editing, A.W., N.R., A.J., S.P.; visualization, N.D., S.P.; supervision, N.R., A.J., S.P.; project administration, N.R., S.P.; funding acquisition, N.R., S.P. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Data Availability Statement
Not applicable.
Acknowledgments
The work was supported by the Ph.D. Merit Scholarship of Islamic Development Bank (IDB) No. NMC-4/TH/P30, Ratchadapisek Somphot Fund for Postdoctoral Fellowship, and Center of Excellence in Electrical Power Technology, Chulalongkorn University, and a research grant from UTM-PROTON Future Drive Laboratory, Universiti Teknologi Malaysia.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Husain, I. Electric and Hybrid Vehicles, 3rd ed.; CRC Press: Boca Raton, 2021; ISBN 9780429490927. [Google Scholar]
- Wang, Y.; Sun, Z.; Chen, Z. Energy Management Strategy for Battery/Supercapacitor/Fuel Cell Hybrid Source Vehicles Based on Finite State Machine. Appl. Energy 2019, 254, 113707. [Google Scholar] [CrossRef]
- Chemali, E.; Peindl, M.; Malysz, P.; Emadi, A. Electrochemical and Electrostatic Energy Storage and Management Systems for Electric Drive Vehicles: State-of-the-Art Review and Future Trends. IEEE J. Emerg. Sel. Top. Power Electron. 2016, 4, 1–1. [Google Scholar] [CrossRef]
- Pullen, K.R.; Dhand, A. Mechanical and Electrical Flywheel Hybrid Technology to Store Energy in Vehicles. In Alternative Fuels and Advanced Vehicle Technologies for Improved Environmental Performance; 2014; pp. 476–504 ISBN 9780857095220.
- Rimpas, D.; Kaminaris, S.D.; Aldarraji, I.; Piromalis, D.; Vokas, G.; Papageorgas, P.G.; Tsaramirsis, G. Energy Management and Storage Systems on Electric Vehicles: A Comprehensive Review. Mater. Today Proc. 2022, 61, 813–819. [Google Scholar] [CrossRef]
- ISO Win the Energy Challenge with ISO 50001. Int. Organ. Stand. 2011, 16.
- Choi, M.; Lee, J.; Seo, S. Real-Time Optimization for Power Management Systems of a Battery / Supercapacitor Hybrid Energy Storage System in Electric Vehicles. IEEE Trans. Veh. Technol. 2014, 63, 3600–3611. [Google Scholar] [CrossRef]
- Song, Z.; Hofmann, H.; Li, J.; Hou, J.; Han, X.; Ouyang, M. Energy Management Strategies Comparison for Electric Vehicles with Hybrid Energy Storage System. Appl. Energy 2014, 134, 321–331. [Google Scholar] [CrossRef]
- Aharon, I.; Kuperman, A. Topological Overview of Powertrains for Battery-Powered Vehicles with Range Extenders. IEEE Trans. Power Electron. 2011, 26, 868–876. [Google Scholar] [CrossRef]
- Ahmed, O.A.; Bleijs, J.A.M. An Overview of DC – DC Converter Topologies for Fuel Cell-Ultracapacitor Hybrid Distribution System. Renew. Sustain. Energy Rev. 2015, 42, 609–626. [Google Scholar] [CrossRef]
- Pay, S.; Baghzouz, Y.; Member, S. Effectiveness of Battery-Supercapaicitor Combination in Electric Vehicles. 2003 IEEE Bol. PowerTech - Conf. Proc. 2003. [Google Scholar]
- Lukic, S.M.S.M.; Cao, J.; Bansal, R.C.R.C.; Rodriguez, F.; Emadi, A.; Member, S.S.; Cao, J.; Bansal, R.C.R.C.; Member, S.S.; Rodriguez, F. Energy Storage Systems for Automotive Applications. Ind. Electron. IEEE Trans. 2008, 55, 2258–2267. [Google Scholar] [CrossRef]
- Iannuzzi, D.; Tricoli, P. Speed-Based State-of-Charge Tracking Control for Metro Trains With Onboard Supercapacitors. IEEE Trans. Power Electron. 2012, 27, 2129–2140. [Google Scholar] [CrossRef]
- Armenta, J.; Núñez, C.; Visairo, N.; Lázaro, I. An Advanced Energy Management System for Controlling the Ultracapacitor Discharge and Improving the Electric Vehicle Range. J. Power Sources 2015, 284, 452–458. [Google Scholar] [CrossRef]
- Dixon, J.; Nakashima, I.; Arcos, E.F.; Ortúzar, M. Electric Vehicle Using a Combination of Ultracapacitors and ZEBRA Battery. IEEE Trans. Ind. Electron. 2010, 57, 943–949. [Google Scholar] [CrossRef]
- Ortúzar, M.; Moreno, J.; Dixon, J. Ultracapacitor-Based Auxiliary Energy System for an Electric Vehicle: Implementation and Evaluation. IEEE Trans. Ind. Electron. 2007, 54, 2147–2156. [Google Scholar] [CrossRef]
- Moreno, J.; Ortuzar, M.E.; Dixon, J.W. Energy-Management System for a Hybrid Electric Vehicle, Using Ultracapacitors and Neural Networks. IEEE Trans. Ind. Electron. 2006, 53, 614–623. [Google Scholar] [CrossRef]
- Wangsupphaphol, A.; Rumzi, N.; Idris, N. Student Research Highlight : Acceleration-Based Design of Electric Vehicle Auxiliary Energy Source. IEEE Aerosp. Electron. Syst. Mag. 2016, 32–35. [Google Scholar] [CrossRef]
- Wangsupphaphol, A.; Rumzi, N.; Idris, N.; Jusoh, A.; Muhamad, N.D.; Chamchuen, S. Acceleration-Based Control Strategy and Design for Hybrid Electric Vehicle Auxiliary Energy Source. ECTI Trans. Comput. Inf. Technol. 2015, 9, 83–92. [Google Scholar] [CrossRef]
- Guidi, G.; Undeland, T.M.; Hori, Y. Optimized Power Electronics Interface for Auxiliary Power Buffer Based on Supercapacitors. In Proceedings of the 2008 IEEE Vehicle Power and Propulsion Conference, VPPC 2008; 2008; Vol. 0; pp. 0–5. [Google Scholar]
- Guidi, G.; Undeland, T.M.; Hori, Y. An Optimized Converter for Battery-Supercapacitor Interface. In Proceedings of the PESC Record - IEEE Annual Power Electronics Specialists Conference; 2007; pp. 2976–2981. [Google Scholar]
- Guidi, G.; Undeland, T.M.; Hori, Y. An Interface Converter with Reduced VA Ratings for Battery-Supercapacitor Mixed Systems. In Proceedings of the Fourth Power Conversion Conference-NAGOYA, PCC-NAGOYA 2007 - Conference Proceedings; 2007; pp. 936–941. [Google Scholar]
- Lu, S.; Corzine, K.A.; Ferdowsi, M. A New Battery/Ultracapacitor Energy Storage System Design and Its Motor Drive Integration for Hybrid Electric Vehicles. IEEE Trans. Veh. Technol. 2007, 56, 1516–1523. [Google Scholar] [CrossRef]
- Kuperman, A.; Aharon, I. Battery – Ultracapacitor Hybrids for Pulsed Current Loads : A Review. Renew. Sustain. Energy Rev. 2011, 15, 981–992. [Google Scholar] [CrossRef]
- Laldin, O.; Moshirvaziri, M.; Trescases, O. Predictive Algorithm for Optimizing Power Flow in Hybrid Ultracapacitor/Battery Storage Systems for Light Electric Vehicles. IEEE Trans. Power Electron. 2013, 28, 3882–3895. [Google Scholar] [CrossRef]
- Florescu, A.; Bacha, S.; Munteanu, I.; Iuliana, A.; Rumeau, A.; Bratcu, A.I.; Rumeau, A. Adaptive Frequency-Separation-Based Energy Management System for Electric Vehicles. J. Power Sources 2015, 280, 410–421. [Google Scholar] [CrossRef]
- Source, B.P.; Hredzak, B.; Agelidis, V.G.; Member, S.; Jang, M. A Model Predictive Control System for a Hybrid. IEEE Trans. POWER Electron. 2014, 29, 1469–1479. [Google Scholar]
- Zhou, S.Q.; Guo, G.F.; Xiang, Y.Y. Multi-Objective Optimal Sizing Hybrid Power System in a Solar Electric Vehicle Using Particle Swarm Optimization Algorithm. Adv. Mater. Res. 2013, 694–697, 2699–2703. [Google Scholar] [CrossRef]
- Wong, J.H.; Sutikno, T.; Idris, N.R.N.; Anwari, M. A Parallel Energy-Sharing Control Strategy for Fuel Cell Hybrid Vehicle. Telkomnika 2011, 9, 357–364. [Google Scholar] [CrossRef]
- Schupbach, R.M.; Balda, J.C. Comparing DC-DC Converters for Power Management in Hybrid Electric Vehicles. IEEE Int. Electr. Mach. Drives Conf. 2003. IEMDC’03. 2003, 3, 1369–1374. [Google Scholar] [CrossRef]
- Amjadi, Z.; Williamson, S.S. Prototype Design and Controller Implementation for a Battery-Ultracapacitor Hybrid Electric Vehicle Energy Storage System. IEEE Trans. Smart Grid 2012, 3, 332–340. [Google Scholar] [CrossRef]
- Fernão Pires, V.; Romero-Cadaval, E.; Vinnikov, D.; Roasto, I.; Martins, J.F. Power Converter Interfaces for Electrochemical Energy Storage Systems - A Review. Energy Convers. Manag. 2014, 86, 453–475. [Google Scholar] [CrossRef]
- Wangsupphaphol, A.; Idris, N.R.N.; Jusoh, A.; Muhamad, N.D.; Alsofyani, I.M. Energy and Power Control Strategy for Battery Electric Vehicle with Supercapacitors. Energy Convers. (CENCON), 2014 IEEE Conf. 2014; 13–18. [Google Scholar] [CrossRef]
- Wangsupphaphol, A.; Idris, N.R.N.; Jusoh, A.; Muhamad, N.D.; Yao, L.W. The Energy Management Control Strategy for Electric Vehicle Applications. Green Energy Sustain. Dev. (ICUE), 2014 Int. Conf. Util. Exhib. 2014; 1–5. [Google Scholar]
- Wangsupphaphol, A.; Idris, N.R.N.; Jusoh, A.; Muhamad, N.D.; Alsofyani, I.M. Acceleration-Based Design Auxiliary Power Source for Electric Vehicle Applications. 2014 11th Int. Conf. Electr. Eng. Comput. Telecommun. Inf. Technol. 2014, 1–6. [Google Scholar] [CrossRef]
- Zhang, P.; Yan, F.; Du, C. A Comprehensive Analysis of Energy Management Strategies for Hybrid Electric Vehicles Based on Bibliometrics. Renew. Sustain. Energy Rev. 2015, 48, 88–104. [Google Scholar] [CrossRef]
- Salmasi, F.R. Control Strategies for Hybrid Electric Vehicles: Evolution, Classification, Comparison, and Future Trends. IEEE Trans. Veh. Technol. 2007, 56, 2393–2404. [Google Scholar] [CrossRef]
- Trovão, J.P.; Antunes, C.H. A Comparative Analysis of Meta-Heuristic Methods for Power Management of a Dual Energy Storage System for Electric Vehicles. Energy Convers. Manag. 2015, 95, 281–296. [Google Scholar] [CrossRef]
- Tie, S.F.; Tan, C.W. A Review of Power and Energy Management Strategies in Electric Vehicles. 2012, 412–417.
- Tie, S.F.; Tan, C.W. A Review of Energy Sources and Energy Management System in Electric Vehicles. Renew. Sustain. Energy Rev. 2013, 20, 82–102. [Google Scholar] [CrossRef]
- Dixon, J.W.; Ortúzar, M.E. Ultracapacitors + DC-DC Converters in Regenerative Braking System. IEEE Aerosp. Electron. Syst. Mag. 2002, 17, 16–21. [Google Scholar] [CrossRef]
- Thounthong, P.; Sethakul, P.; Raël, S.; Davat, B. Performance Evaluation of Fuel Cell / Battery / Supercapacitor Hybrid Power Source for Vehicle Applications. IEEE Ind. Appl. Soc. Annu. Meet. IAS 2009 2009, 1–8. [Google Scholar]
- Thounthong, P.; Raël, S.; Davat, B. Energy Management of Fuel Cell/Battery/Supercapacitor Hybrid Power Source for Vehicle Applications. J. Power Sources 2009, 193, 376–385. [Google Scholar] [CrossRef]
- Faggioli, E.; Rena, P.; Danel, V.; Andrieu, X.; Mallant, R.; Kahlen, H. Supercapacitors for the Energy Management of Electric Vehicles. J. Power Sources 1999, 84, 261–269. [Google Scholar] [CrossRef]
- Ortuzar, M.; Dixon, J.; Moreno, J. Design, Construction and Performance of a Buck-Boost Converter for an Ultracapacitor-Based Auxiliary Energy System for Electric Vehicles. IECON’03. 29th Annu. Conf. IEEE Ind. Electron. Soc. (IEEE Cat. No.03CH37468) 2003, 3, 2889–2894. [Google Scholar] [CrossRef]
- Dixon, J.W.; Ortúzar, M.; Wiechmann, E. Regenerative Braking for an Electric Vehicle Using Ultracapacitores and a Buck-Boost Converter. In Proceedings of the 17th Electric Vehicle Symposium (EVS17), (Canada); 2000. [Google Scholar]
- Wangsupphaphol, A.; Idris, N.R.N.; Jusoh, A.; Muhamad, N.D. Power Converter Design for Electric Vehicle Applications. J. Teknol. (Sciences Eng. 2014, 67, 25–31. [Google Scholar] [CrossRef]
- Wangsupphaphol, A.; Rumzi, N.; Idris, N.; Jusoh, A.; Muhamad, N.D.; Chaitusaney, S. Design and Development of Auxiliary Energy Storage for Battery Hybrid Electric Vehicle. J. Energy Storage 2022, 51, 104533. [Google Scholar] [CrossRef]
- Karunarathne, E.; Wijesekera, A.; Samaranayake, L.; Binduhewa, P.; Ekanayake, J. On the Implementation of Hybrid Energy Storage for Range and Battery Life Extension of an Electrified Tuk-Tuk. J. Energy Storage 2022, 46. [Google Scholar] [CrossRef]
- Wang, G.; Yang, P.; Zhang, J. Fuzzy Optimal Control and Simulation of Battery-Ultracapacitor Dual-Energy Source Storage System for Pure Electric Vehicle. Proc. 2010 Int. Conf. Intell. Control Inf. Process. ICICIP 2010 2010, 555–560. [Google Scholar] [CrossRef]
- Xiaoliang, H.; Curti, J.M.A.; Yoichi, H. Energy Management Strategy with Optimized Power Interface for the Battery Supercapacitor Hybrid System of Electric Vehicles. IECON Proc. (Industrial Electron. Conf. 2013; 4635–4640. [Google Scholar] [CrossRef]
- Zandi, M.; Payman, A.; Martin, J.; Pierfederici, S.; Davat, B.; Meibody-Tabar, F. Energy Management of a Fuel Cell / Supercapacitor / Battery Power Source for Electric Vehicular Applications. IEEE Trans. Veh. Technol. 2011, 60, 433–443. [Google Scholar] [CrossRef]
- Cao, J.; Cao, B.; Bai, Z.; Chen, W. Energy-Regenerative Fuzzy Sliding Mode Controller Design for Ultracapacitor-Battery Hybrid Power of Electric Vehicle. In Proceedings of the 2007 International Conference on Mechatronics and Automation; 2007; pp. 1570–1575. [Google Scholar]
- Li, Q.; Chen, W.; Liu, Z.; Li, M.; Ma, L. Development of Energy Management System Based on a Power Sharing Strategy for a Fuel Cell-Battery-Supercapacitor Hybrid Tramway. J. Power Sources 2015, 279, 267–280. [Google Scholar] [CrossRef]
- Sampathnarayanan, B.; Onori, S.; Yurkovich, S. ; Ieee An Optimal Regulation Strategy for Energy Management of Hybrid Electric Vehicles. 2012 Ieee 51st Annu. Conf. Decis. Control 2012, 50, 7063–7068. [Google Scholar]
- Dellnitz, M.; Eckstein, J.; Flaßkamp, K.; Friedel, P.; Horenkamp, C.; Köhler, U.; Ober-Blöbaum, S.; Peitz, S.; Tiemeyer, S. Development of an Intelligent Cruise Control Using Optimal Control Methods. Procedia Technol. 2014, 15, 285–294. [Google Scholar] [CrossRef]
- Li, L.; Zhang, Y.; Yang, C.; Jiao, X. Hybrid Genetic Algorithm-Based Optimization of Powertrain and Control Parameters of Plug-in Hybrid Electric Bus. J. Franklin Inst. 2015, 352, 776–801. [Google Scholar] [CrossRef]
- Ren, Y.; Zhong, Z. A Combined Particle Swarm Optimization-Wavelet Transform Based Strategy for Power Management of PEM Fuel Cell Powered Hybrid System. Adv. Mater. Res. 2014, 973, 954–957. [Google Scholar] [CrossRef]
- Chen, Z.; Mi, C.C.; Xia, B.; You, C. Energy Management of Power-Split Plug-in Hybrid Electric Vehicles Based on Simulated Annealing and Pontryagin ’ s Minimum Principle. J. Power Sources 2014, 272, 160–168. [Google Scholar] [CrossRef]
- Sousa, T.; Vale, Z.; Carvalho, J.P.; Pinto, T.; Morais, H. A Hybrid Simulated Annealing Approach to Handle Energy Resource Management Considering an Intensive Use of Electric Vehicles. Energy 2014, 67, 81–96. [Google Scholar] [CrossRef]
- Jain, M.; Desai, C.; Williamson, S.S. Genetic Algorithm Based Optimal Powertrain Component Sizing and Control Strategy Design for a Fuel Cell Hybrid Electric Bus. 2009 IEEE Veh. Power Propuls. Conf. 2009, 980–985. [Google Scholar]
- Chen, Z.; Xia, B.; You, C.; Mi, C.C. A Novel Energy Management Method for Series Plug-in Hybrid Electric Vehicles. Appl. Energy 2015, 145, 172–179. [Google Scholar] [CrossRef]
- Zhang, S.; Xiong, R. Adaptive Energy Management of a Plug-in Hybrid Electric Vehicle Based on Driving Pattern Recognition and Dynamic Programming. Appl. Energy 2015, 155, 68–78. [Google Scholar] [CrossRef]
- Samanta, C.K.; Hota, M.K.; Nayak, S.R.; Panigrahi, S.P.; Panigrahi, B.K. Energy Management in Hybrid Electric Vehicles Using Optimized Radial Basis Function Neural Network. Int. J. Sustain. Eng. 2014, 7, 352–359. [Google Scholar] [CrossRef]
- Anubi, O.M.; Clemen, L. Energy-Regenerative Model Predictive Control. J. Franklin Inst. 2015, 352, 2152–2170. [Google Scholar] [CrossRef]
- Borhan, H. a.; Vahidi, A. Model Predictive Control of a Power-Split Hybrid Electric Vehicle with Combined Battery and Ultracapacitor Energy Storage. Am. Control Conf. (ACC), 2010 2010, 5031–5036. [Google Scholar] [CrossRef]
- Thounthong, P.; Davat, B. Control Strategy of Fuel Cell / Supercapacitors Hybrid Power Sources for Electric Vehicle. 2006, 158, 806–814. [CrossRef]
- Thounthong, P.; Chunkag, V.; Sethakul, P.; Davat, B.; Hinaje, M. Comparative Study of Fuel-Cell Vehicle Hybridization with Battery or Supercapacitor Storage Device. IEEE Trans. Veh. Technol. 2009, 58, 3892–3904. [Google Scholar] [CrossRef]
- Shen, J.; Khaligh, A. Design and Real-Time Controller Implementation for a Battery-Ultracapacitor Hybrid Energy Storage System. IEEE Trans. Ind. Informatics 2016, 12, 1910–1918. [Google Scholar] [CrossRef]
- Zhai, C.; Luo, F.; Liu, Y. A Novel Predictive Energy Management Strategy for Electric Vehicles Based on Velocity Prediction. IEEE Trans. Veh. Technol. 2020, 69, 12559–12569. [Google Scholar] [CrossRef]
- Wang, J.; Zhou, J.; Zhao, W. Deep Reinforcement Learning Based Energy Management Strategy for Fuel Cell/Battery/Supercapacitor Powered Electric Vehicle. Green Energy Intell. Transp. 2022, 1, 100028. [Google Scholar] [CrossRef]
Figure 1.
The research approach used in this study.
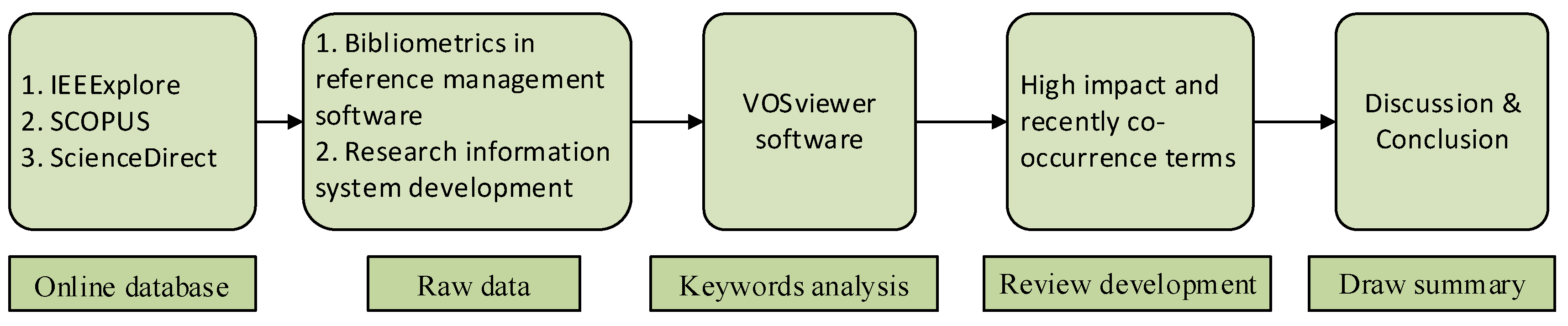
Figure 2.
Keyword intensity in our field of interest during the past decade.
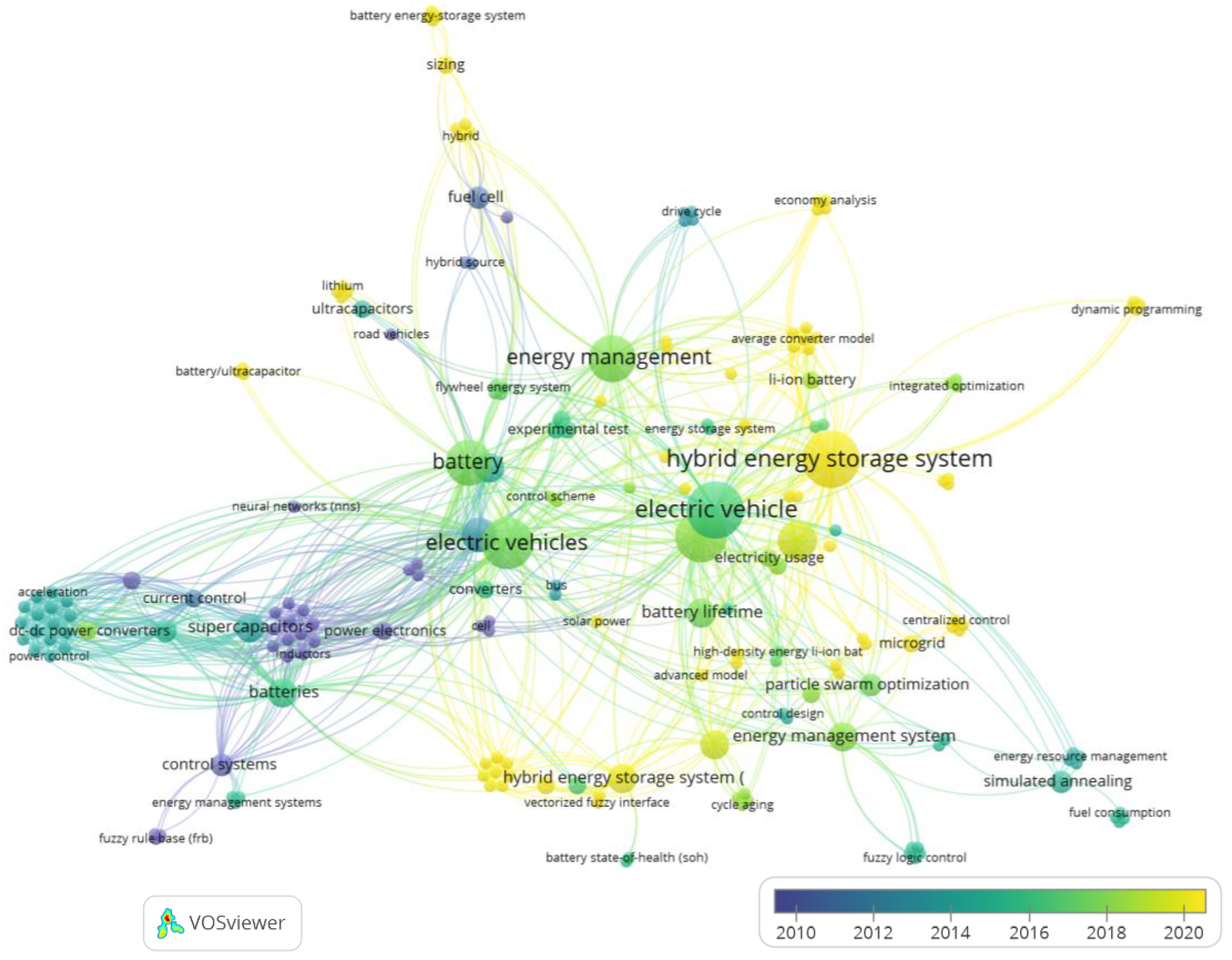
Figure 3.
Configurations of battery/SC in HESS for EV applications.
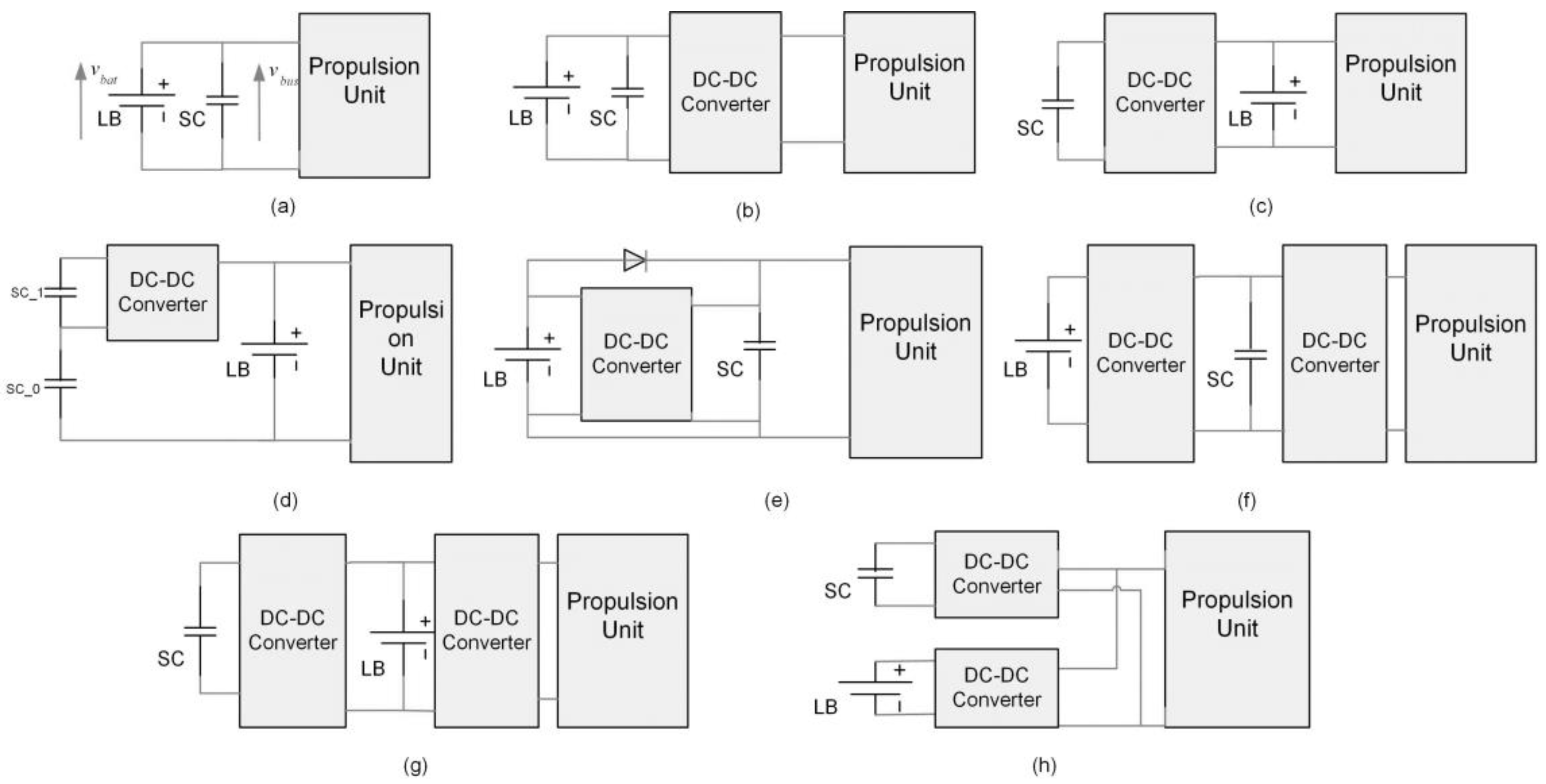
Figure 4.
Half-bridge converter architecture coupled to SC and battery.
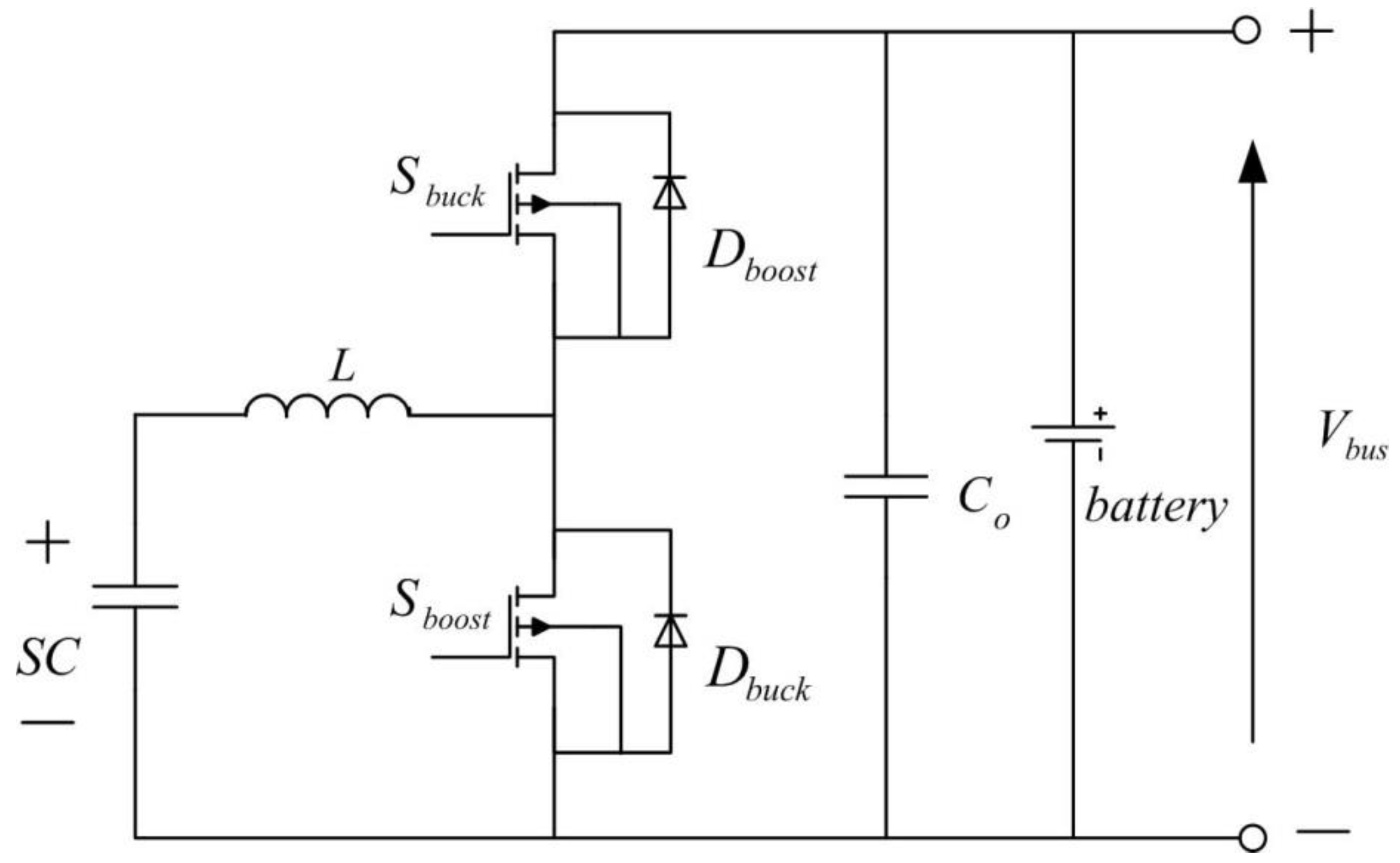
Figure 5.
Control strategies for energy control management in EV applications.
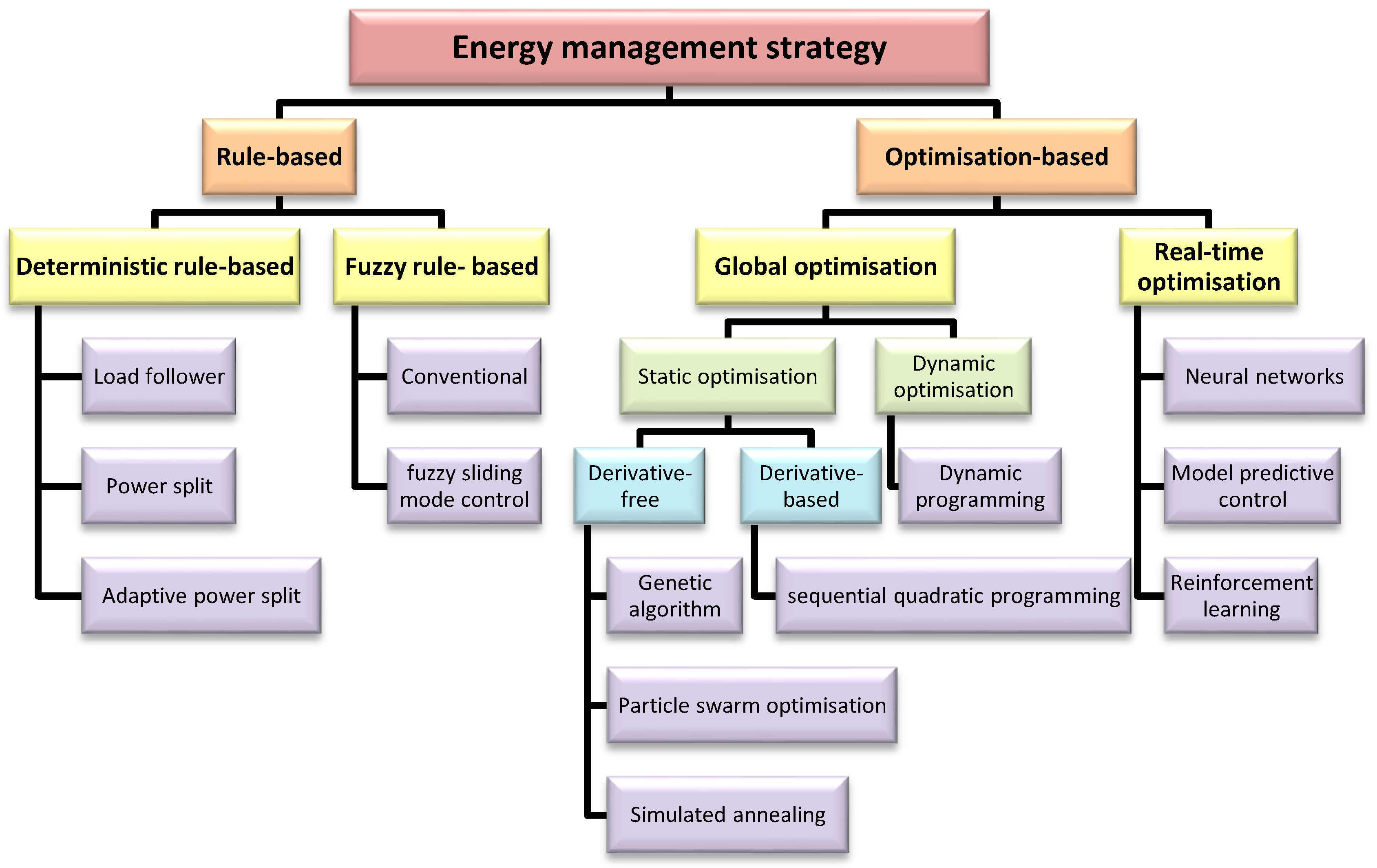

Table 1.
Converter evaluation in battery/SC HESS applications.
| Configuration | Converter size (score 0-3) | DC bus voltage (score 0-2) | Reliability (score 0-1) | Total score |
|---|---|---|---|---|
| (a) | None (0) | Follow battery (1) | High (1) | 2 |
| (b) | 1 full size (1) | Constant (2) | Low (0) | 3 |
| (c) | 1 medium size (2) | Follow battery (1) | High (1) | 4 |
| (d) | 1 small size (3) | Follow battery (1) | High (1) | 5 |
| (e) | 1 medium size (2) | Follow SC (0) | High (1) | 3 |
| (f)-(h) | 1 full 1 medium size (1) | Constant (2) | Low (0) | 3 |
Table 2.
Features of energy management strategies of HESS for EV applications.
| Paper | EMS | Control structure | Main Contributions | Validation | Limitations | Year |
|---|---|---|---|---|---|---|
| [15,16,17,41,45,46] | Rule-based; Load follower | SC converter for current control within bandwidth |
|
|
|
2000-2010 |
| [42,67,68] | SC converter for current control based on energy and power-SC converter |
|
Experimental validation |
|
2006-2009 | |
| [29] | SC converter for voltage and current control |
|
Experimental validation |
|
2011 | |
| [14] | SC converter for power control based on vehicle dynamic |
|
Simulation |
|
2015 | |
| [48] | SC converter for current control based on vehicle dynamic |
|
Simulation and lab-scale experiment | Real-vehicle experiement | 2022 | |
| [8] | Rule-based; power split | SC converter for power control based on vehicle kinetic energy |
|
Simulation |
|
2014 |
| [26] | Rule-based; adaptive power split | SC converter for curent and voltage control | Less complex of SC control reference generation | Real-time simulation | Slow control response causes inefficient use of the battery and SC. | 2019 |
| [49] | Rule-based; power split using Kalman filter | Battery and SC converter for SOC control |
|
Real-vehicle experiment |
|
2022 |
| [50] | Rule-based; conventional fuzzy logic | Battery and SC converter for power control |
|
Simulation in ADVISOR 2002 |
|
2010 |
| [52] | Battery and SC converter for energy and power control |
|
Simulation and experiment |
|
2011 | |
| [53] | Rule-based; fuzzy sliding mode | Battery and SC converter for SOC control |
|
Micro EV experiment |
|
2007 |
| [54] | Rule-based harr-wavelet fuzzy logic | Battery and SC converter for power control |
|
Tramway experiment |
|
2015 |
| [56] | Off-line optimization; sequential quadratic programming | Minimised battery’s SOC and velocity variation |
|
Simulation |
|
2014 |
| [61] | Off-line optimization; non-dominated sorting genetic algorithm | Minimised fuel economy and cost |
|
Simulation |
|
2009 |
| [58] | Off-line optimization; PSO-wavelet-transform | Estimation of battery and SC SOC and optimization of PID parameters |
|
Simulation |
|
2014 |
| [62] | Off-line optimization; Simulated annealing | Optimal battery power |
|
Simulation in Autonomie |
|
2015 |
| [63] | Off-line optimization; dynamic programming | optimal power distribution |
|
Simulation |
|
2015 |
| [15],[69] | Real-time optimization; neural network | SC converter for current control |
|
Real-vehicle experimet, real-time experiment |
|
2010, 2016 |
| [66],[70] | Real-time optimization; model predictive | Battery and SC converter for SOC control |
|
Simulation |
|
2010,2020 |
| [71] | Real-time optimization; deep-reinforcement learning | Fuel cell/battery/SC converter |
|
Simulation |
|
2022 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



