
Submitted:
16 May 2023
Posted:
17 May 2023
You are already at the latest version
Abstract
The paper deals with applying Artificial Intelligence techniques to examine CHIRP-recorded data in sand and sandstone sea-bottom sites. The provided analysis of the state of the art portrays that actual time series or spectrum backscattered data from a point on the sea bottom were rarely used as the features for machine learning models. The results of the examination indicate that types of sea bottom can be quantitatively characterized by applying logistic regression models to either the backscatter time series of a frequency-modulated signal or the spectrum of that backscatter. The examination accuracy reached 90% for the time series and 94% for the spectra. The application of spectral data as features for more advanced machine learning algorithms, and the advantages of its combination with other types of data have great potential for future research and the enhancement of remote marine soil classification.
Keywords:
marine survey
; acoustic reflection
; spectral analysis
; sediments identification
1. Introduction
Acoustic data is an indispensable tool in marine science that is widely used to map and analyze sea bottom characteristics. This NDT technique is especially useful for soil investigations, which include the use of bathymetric mapping to study the topography of the ocean floor, conducting both shallow and deep acoustic surveys to gain insights into the subsoil, identifying existing infrastructure both on and beneath the seafloor, and determining underwater positioning [1,2,3,4,5,6,7,8,9,10,11,12]. The marine industry relies heavily on calibrated backscatter intensity to classify the composition of the sea-bottom upper layer using remote sensing tools that have become standard in the field.
When looking at the scientific literature, it becomes apparent that research into the spectral analysis of the acoustic response of the seabed is relatively limited, with a focus on large-scale data and non-localized side scan data. Single beam type sonars, such as sub-bottom profilers or multibeam sonars, are rarely studied in comparison. While some studies have explored the use of signal and image processing techniques, occasionally in combination with AI algorithms, no reliable quantitative classification method has yet been established [13,14,15,16,17,18,19,20,21,22,23,24,25,26,27,28]. Other studies focused on calibrated backscatter intensity methods [29,30], and sometimes assisted with sub-bottom profiler for geological background [31]. Examining the available literature indicates that the primary means of assessing sub-bottom soil composition in acoustic seabed studies is through backscatter intensity, as exemplified by [32], which often requires extensive calibration such as that provided by the geocoder algorithm [33]. A comprehensive review conducted by Anderson et al. [34] emphasized the need for careful calibration when attempting to relate acoustic-backscattering measurements to the sub-surface properties and content of the seabed. The few studies [27] that have attempted to identify sea-bottom soil types based on spectral characteristics have mostly been limited to side-scan sonar data, which is inherently limited by the scale of the features it captures, as noted by [27]. Moreover, it should be noted that a single swath of acoustic data may comprise multiple soil types, limiting such methods’ applicability. While they may yield valuable insights when applied to large, relatively homogeneous sea bottom regions, they may be less effective when dealing with more complex, heterogeneous areas containing a variety of soil types, such as rock, sand, and clay.
The application of artificial intelligence (AI) techniques has significantly contributed to the advancement of acoustic data classification in marine science, providing a more objective and efficient approach to seabed mapping. A study conducted by [35] utilized hybrid artificial neural networks that incorporated a self-organizing feature map and learning vector quantization to classify four different manganese nodule-bearing sites using angular backscatter intensity as the learning and classification features. The resulting model achieved classification accuracies ranging from 87 to 95%. Additionally, [36,37,38,39] utilized a feed-forward neural network and convolutional neural networks to predict source charge and bottom composition (mud and sand combinations) for sus charges. The features used varied from simulated pressure time series or extracted features such as peak level, an integrated level, signal length, and decay time, to simulated peak pressure and backscatter intensity. The accuracies of the models varied from 84% to 97% for the convolutional neural network used in [37]. These studies illustrate the potential of AI algorithms in the classification of acoustic data for marine soil characterization.
The classification of soil based on multibeam echo sounder (MBES) data has been the focus of recent studies [40,41,42]. In one such study, [40] applied support vector machine classification to MBES bathymetric and backscatter data to classify mud, sand, and gravel, achieving an accuracy of 90%. Similarly, [41] utilized deep neural networks to classify the same materials from bathymetric and backscatter data that were reduced using fuzzy ranking. This resulted in an accuracy of 86% for soil classification. Another study [42] achieved a classification accuracy of 93% for mud, sand, and gravel combinations using deep learning with backscatter bathymetry and the angular response and mosaic texture of MBES data. These studies demonstrate the efficacy of AI techniques, specifically support vector machines and deep neural networks, in the classification of soil based on MBES data. By incorporating features such as bathymetric and backscatter data, as well as angular response and mosaic texture, the accuracy of soil classification has been greatly improved. These findings have important implications for the mapping and characterization of seabed environments, highlighting the potential of AI techniques for future research in marine science.
Upon analysis of the current state-of-the-art literature, it is evident that the features utilized in machine learning approaches for the topic of this article rely heavily on integral characteristics such as backscatter intensity as a function of the angle of incidence, mosaic texture, and bathymetry [35,36,39,40,41,42]. While these features have proven effective in seabed mapping and classification, it is important to note that actual time series or spectrum backscattered from a point on the seafloor have been rarely utilized, if at all. However, a study conducted by [43] demonstrated the potential of utilizing the frequency domain representation of the time series of a reflected chirp sub-bottom profiler signal for distinguishing between sand and sandstone. This approach showed promising results, as the number of crossings of the spectrum at 1/16 of the maximal normalized power classifier demonstrated the ability to assess the probability for sand or sandstone with over 80% certainty in over 75% of the cases. Incorporating this type of approach into machine learning models for seabed mapping and classification may provide a more comprehensive understanding of the seafloor structures and their associated ecological communities, ultimately leading to better management and preservation of marine resources. Future research should explore the potential of utilizing time series or spectrum data in machine learning approaches for the characterization of marine environments, as it may lead to significant advancements in the field.
The main hypothesis of the research [43] was that spectral features of acoustic signals reflected from the sand and sandstone sea bottoms are due to essential dissimilarity in the physical properties of these two media. These properties include fine-scale topography at the top of both types of sediments as well as the heterogeneity of several meters (depending on the signal length) below the top of the reflector. As these singularities are significantly different for sand and sandstone, they are expected to affect the acoustic signals reflected from the top of the sea bottom, which in turn affects their spectral parameters such as amplitude, main frequency, frequency-dependent reflection coefficient, number of spikes, etc. However, the main disadvantage of the presented method was the qualitative choice of the spectral parameters used for classification, resulting in less-than-optimal accuracy.
In the present study, the discrete values of the reflected time series and spectra obtained by [43] were used as training sets for two logistic regression models [44]. This machine-learning technique was found to be effective for the classification of sand and sandstone and was shown to compete with the results of much more complicated machine-learning techniques such as convolutional neural networks used in previous studies [35,36,37,38,39,40,41,42]. The logistic regression models showed promising results in terms of accuracy and were able to classify the sand and sandstone with high confidence, making it a viable and practical option for the classification of these seabed sediment types.
2. Method
A preliminary data collection was performed using a chirp sub-bottom profiler to study two sand bottom sites at 26m depth, and two sandstone bottom sites at 33m depth, both offshore of Ashqelon. The first reflection time series and spectra of all the traces from the four sites were used to generate two training and two verification sets. Two logistic regression models [44] were trained using the training sets and were then evaluated for accuracy over the verification sets.
2.1. Experimental Setup
For the data collection campaign, the Bathy-2010PC chirp sub-bottom profiler (SBP) was selected as the acoustic device. This device features a linear chirp with a frequency sweep ranging from 2.75 kHz to 6.75 kHz, a signal duration of 5.4 ms, and a beam angle of 30°. It is anticipated that in this context, the reflected signal will be influenced by the fine-scale topography of the reflector, such as boulders and sand ripples.The data collection was conducted at two offshore locations near Ashkelon, referred to as "site 1" and "site 2," which were approximately 1.2 km apart. The bottom at site 1 and site 2 were previously determined to be sandy and located at a depth of 26 meters. Similarly, data was collected at two other locations, referred to as "site 3" and "site 4," which were about 0.8 km apart. At these sites, the bottom was determined to be sandstone at a depth of 33 meters. The soil composition at each of these sites was verified in a previous site survey through sand sampling and the use of a drop camera. Each site had an area with similar soil composition that extended several hundreds of meters in radius. At each site, the vessel was moored, and its position slightly adjusted due to variations in wind and wave direction during data collection. This resulted in each trace being captured at a slightly different location, but over the same type of soil. The transducer was installed on the vessel's side and placed at a depth of 1 meter below the waterline. The sound speed in water was measured to be 1530 meters per second. The data was recorded in an unprocessed format, without any chirp compression applied. Each trace was captured for a total of 100 milliseconds, encompassing the transmitted signal, water column, the bottom, and approximately 120 meters of soil penetration. The transmission parameters used are summarized in Table 1.
2.2. Data extraction and preparation
The SegY files collected during the offshore campaign were utilized to extract data for further analysis using MATLAB's SegyMat subroutines. To ascertain that soil characteristics, and not changes in the transmitted signal, are responsible for differences in the reflected signal, repeatability checks were conducted for all traces and across all four sites. Results showed near-perfect repeatability of the transmitted signal. The time series was then divided into transmitted, reverberations, first reflection, and remaining signal parts, with a focus on the first reflection to characterize the first soil layer. The first reflection was extracted from each trace, by identifying the first reflection's start point as the beginning of a sharp increase in the rate of growth of local extremum values and setting the first reflection's duration to that of the transmitted signal. The first reflection (time series and spectrum) was then taken as data sets and used to construct the design matrices.
3. Data Sets
3.1. Time Series data
The time series data includes 450 traces (training examples) in the training set and 150 traces in the verification sets. Each training example includes 108 features that correspond to the raw sampled measurements of the 5.4ms reflected signal (with a sampling frequency of 20KHz). Typical time series appear in Figure 1.
3.2. Spectral data
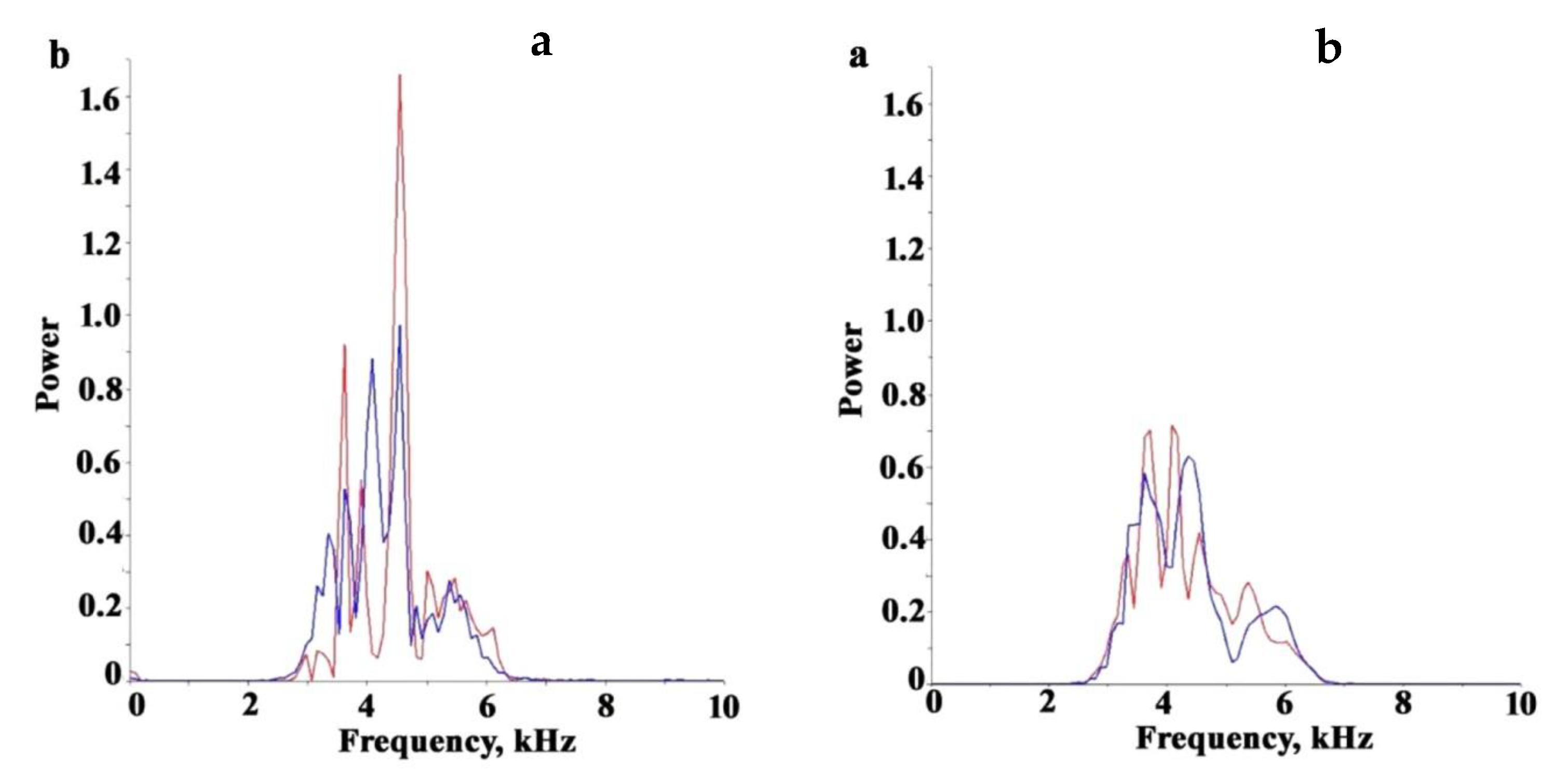
The process of obtaining spectral features from acoustic signals reflected from the sea bottom involved several stages. The time series were auto-correlated and transformed into the frequency domain using the Discrete Fourier Transform. This results in a two-sided power spectrum that contains information on the frequency components of the signal. To obtain the one-sided power spectrum, the positive frequency range was selected, and the power values were multiplied by two (except for the first term), and then normalized by the spectrum area. The normalization step is necessary to correct for differences in attenuation between sand and sandstone sites due to the depth differences.
To ensure that the spectra data is clean and accurate, a noise reduction step was performed by applying a frequency bandwidth filter to match the transmitted signal's frequency range of 2.75 kHz to 6.75 kHz. The resulting discrete spectra points were used as features in machine learning models for the classification of sand and sandstone sea bottoms.
The dataset used in the study contains a total of 600 traces, of which 450 were used for training and 150 for verification. Each trace has 109 features corresponding to the discrete values of the spectrum. The training and verification sets were used to train two logistic regression models, which were assessed for accuracy in classifying sand and sandstone sea bottoms.
The presented method of using spectral features for ML-based classification offers an effective approach, as will be demonstrated next, as the spectral data correlates to the physical properties of the sand and sandstone bottoms.
Figure 2.
Stacked normalized power spectra [1/kHz]: a sandstone (site 3 - red line), site 4 (blue line). b. sand (site1-red line), site 2 (blue line).
Figure 2.
Stacked normalized power spectra [1/kHz]: a sandstone (site 3 - red line), site 4 (blue line). b. sand (site1-red line), site 2 (blue line).
4. The Results of the Logistic Regression Model
Two logistic regression models were trained using training sets, and their accuracy was evaluated over training and verification sets. The cost function was minimized by using 400 iterations of gradient descent. One of the models was trained using time series data, and it achieved an accuracy of 95.6% over the training set and 90% over the verification set. The other model was trained using spectra data, and it achieved an accuracy of 95.33% over the training set and 94% over the verification set. Corresponding confusion matrices are presented in Table 2 a-d. These results show that both models were effective in classifying sand and sandstone with high accuracy, with the spectral model performing slightly better than the time series model.
The next step was to assess the performance of the models to actual field surveys and to assess the required size of data sets and number of iterations required to achieve reasonable results. For this purpose, the accuracies over the training set and over the verification set were calculated for different relative training set sizes (no of used training examples divided by no of features). These results appear in Table 3. These results show that comparable accuracy to the work done by [43] could be achieved with a relative training set size of 2.45 compared to the 4.09 relative set size used by [43]. When utilizing the same relative set size, the logistic regression model achieved 94% accuracy over the verification set (vs the 80% accuracy of [43]). This may have a significant impact on the results obtained in actual field surveys as will be discussed in the next section.
5. Discussion and Conclusions
Application of the logistic regression approach to a wide range of applied tasks is in the mainstream of geophysics in general and marine geophysics particularly [45,46,47,48,49,50,51,52], for example, for the study of the changes in soil properties [45], the ocean processes [46], etc. However, such an approach is rarely used for the sea bottom soil classification. From the results presented above it follows that the two sea bottom types can be successfully and quantitatively characterized by applying logistic regression models to either the backscatter time series of a frequency-modulated signal or the spectrum of that backscatter.
The achieved classification accuracy (over the verification sets) is 90% for the time series and 94% for the spectra. The improved results when using spectral data may be due to the option to clean noise with frequencies out of the bandwidth of the reflected signal. It is important to note that the models were trained using a relatively small dataset, which suggests that even higher accuracy may be achievable with larger datasets.
It is evident from the results of this study that applying machine learning algorithms has the potential to enhance sonar-based soil classification accuracies in comparison to manual extraction and classification criteria [43].
The model achieved comparable accuracy to [43] with a training set which is approximately 60% the size of training set required by [43]. This might be important when collecting data in actual survey activities where the survey vessel is less stationary and hence less data is collected over each area and corresponding type of soil, making the method presented here more advantageous for soil classification based on data collected during standard hydrographic surveys.
As for feature selection for machine learning algorithms, it is assumed that the reflected spectrum (and corresponding time series) of a frequency-modulated signal is affected by the reflector characteristics such as grain size, relief, voids, stratification, etc. Hence, using this data as features is superior to using integral features such as peak pressure, total intensity, angular intensity, etc. As used by previous works performed on sonar data [35,40,41,42]. Applying a relatively simple logistic regression model on spectral data achieved superior accuracy to neural network methods applied to integral data (intensity, angular intensity, elevation, etc.) in the case of sonar data. Based on these findings it is assumed that the combination of spectral analysis with machine learning, and the use of the spectral series as features can enhance the performance of machine learning algorithms for sonar base soil classification. The application of spectral data as features for more advanced machine learning algorithms, and the advantages of its combination with other types of data such as the angle of incidence is of great potential for future research and the enhancement of remote marine soil classification.
Based on the results, the study presented here established soil classification method principles achieving high classification accuracy and easily applicable to data collected in standard hydrographic surveys.
Author Contributions
Conceptualization (U.K. and V.F.); Data curation (U.K.), Formal analysis (U.K. and V.F.); Methodology (U.K); Writing—original draft (U.K. and V.F.); Writing—review and editing (U.K. and V.F.). All authors have read and agreed to the published version of the manuscript.
Data Availability Statement
All data generated and analysed during this study are included in the article.
Acknowledgments
VF acknowledges the support within the European Union’s Horizon 2020 research and innovation programme under the Marie Sklodowska-Curie RISE project EffectFact grant agreement No 101008140. All data generated and analysed during this study are included in the article. UK and VF would like to thank Sami Shamoon College of Engineering Grants No. YR03/Y18/T2/D3/Yr2 and YR03/Y17/T1/D3/Yr1 for the financial support that allowed a thorough study of the problem.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Shtienberg, G.; Dix, J.; Waldmann, N.; Makovsky, Y.; Golan, A.; Sivan, D. Late-Pleistocene evolution of the continental shelf of central Israel, a case study from Hadera. Geomorphology 2016, 261, 200–211. [Google Scholar] [CrossRef]
- Pergent, G.; Monnier, B.; Clabaut, P.; Gascon, G.; Pergent-Martini, C.; Valette-Sansevin, A. Innovative method for optimizing Side-Scan Sonar mapping: The blind band unveiled. Estuarine, Coastal and Shelf Science 2017, 194, 77–83. [Google Scholar] [CrossRef]
- Boswarvaa, K.; Butters, A.; Foxa, C.J.; Howea, J.A.; Narayanaswamy, B. Improving marine habitat mapping using high-resolution acoustic data; a predictive habitat map for the Firth of Lorn, Scotland. Continental Shelf Research 2018, 168, 39–47. [Google Scholar] [CrossRef]
- Jaijela, R.; Kanari, M.; Glover, J.B.; Rissolo, D.; Beddows, P.A.; Ben-Avraham, Z.; Goodman-Tchernov, B.N. Shallow geophysical exploration at the ancient maritime Maya site of Vista Alegre, Yucatan Mexico. Journal of Archaeological Science: Reports 2018, 19, 52–63. [Google Scholar] [CrossRef]
- Innangi, S.; Tonielli, R.; Romagnolo, C.; Budillon, F.; Di Martino, G.; Innangi, M.; Laterza, R.; Le Bas, T.; Lo Iacono, C. Seabed mapping in the Pelagie Islands marine protected area (Sicily Channel, southern Mediterranean) using Remote Sensing Object Based Image Analysis (RSOBIA). Marine Geophysical Research 2019, 40, 333–355. [Google Scholar] [CrossRef]
- Caballero, I.; Stumpf, R.P. Retrieval of nearshore bathymetry from Sentinel-2A and 2B satellites in South Florida coastal waters. Estuarine, Coastal and Shelf Science 2019, 226, 106277. [Google Scholar] [CrossRef]
- Crocker, S.E.; Fratantonio:, F.D.; Hart, P.E.; Foster, D.S.; O’Brien, T.F.; Labak, S. Measurement of Sounds Emitted by Certain High-Resolution Geophysical Survey Systems. EEE Journal of oceanic engineering 2019, 44, 796–813. [Google Scholar] [CrossRef]
- Tayber, Z.; Meilijson, A.; Ben-Avraham, Z.; Makovsky, Y. Methane Hydrate Stability and Potential Resource in the Levant Basin, Southeastern Mediterranean Sea. Geosciences, 2019, 9, 306. [Google Scholar] [CrossRef]
- Sun, K.; Cui, W.; Chen, C. Review of Underwater Sensing Technologies and Applications. Sensors 2021, 21, 7849. [Google Scholar] [CrossRef]
- Wu, Q.; Ding, X.; Zhang, Y.; Chen, Z. Comparative Study on Seismic Response of Pile Group Foundation in Coral Sand and Fujian Sand. J. Mar. Sci. Eng. 2020, 8, 189. [Google Scholar] [CrossRef]
- Liu, B.; Chang, S.; Zhang, S.; Li, Y.; Yang, Z.; Liu, Z.; Chen, Q. Seismic-Geological Integrated Study on Sedimentary Evolution and Peat Accumulation Regularity of the Shanxi Formation in Xinjing Mining Area, Qinshui Basin. Energies 2022, 15, 1851. [Google Scholar] [CrossRef]
- Modenesi, M.C.; Santamarina, J.C. Hydrothermal metalliferous sediments in Red Sea deeps: Formation, characterization and properties. Engineering Geology 2022, 305, 106720. [Google Scholar] [CrossRef]
- Pace, N.G.; Gao, H. Swathe seabed classification. IEEE Journal of oceanic engineering 1988, 13, 83–90. [Google Scholar] [CrossRef]
- Tamsett, D. Sea-bed characterization and classification from the power spectra of side-scan sonar data. Marine Geophysical Researches 1993, 15, 43–64. [Google Scholar] [CrossRef]
- Stevenson, I.R.; McCann, C.; Runciman, P.B. An attenuation-based sediment classification technique using Chirp sub-bottom profiler data and laboratory acoustic analysis. Marine Geophysical Research 2002, 23, 277–298. [Google Scholar] [CrossRef]
- Atallah, L.; Probert Smith, P.J.; Bates, C.R. Wavelet analysis of bathymetric side scan sonar data for the classification of seafloor sediments in Hopvågen Bay-Norway. Marine Geophysical Research 2002, 23, 431–442. [Google Scholar] [CrossRef]
- Kenny, A.J.; Cato, I.; Desprez, M.; Fader, G.; Schüttenhelm, R.T.E.; Side, J. An overview of seabed-mapping technologies in the context of marine habitat classification. ICES Journal of Marine Science 2003, 60, 411–418. [Google Scholar] [CrossRef]
- Reed, S.; Petillot, Y.; Bell, Y. An automatic approach to the detection and extraction of mine features inside scan sonar. IEEE Journal of oceanic engineering 2003, 28, 90–105. [Google Scholar] [CrossRef]
- Szuman, M.; Berndt, Ch.; Jacobs, C.; Best, A. Seabed characterization through a range of high-resolution acoustic systems–a case study offshore Oman. Marine Geophysical Research 2006, 27, 167–180. [Google Scholar] [CrossRef]
- Satyanarayana, Y.; Naithani, S.; Anu, R. Seafloor sediment classification from single beam echo sounder data using LVQ network. Marine Geophysical Research 2007, 28, 95–99. [Google Scholar] [CrossRef]
- Tian, W.-M. Integrated method for the detection and location of underwater pipelines. Applied Acoustics 2008, 69, 387–398. [Google Scholar] [CrossRef]
- Langner, F.; Knauer, Ch.; Ebert, A. Side scan sonar image resolution and automatic object detection, classification and identification. OCEANS 2009-EUROPE; IEEE, 2009. [Google Scholar]
- Sun, Z.; Hu, J.; Zheng, Q.; Li, C. Strong near-inertial oscillations in geostrophic shear in the northern South China Sea. J Oceanogr. 2011, 67, 377–384. [Google Scholar] [CrossRef]
- Nait-Chabane AZerr, B.; Le Chenadec, G. Side scan sonar imagery segmentation with a combination of texture and spectral analysis. OCEANS-Bergen, 2013 MTS/IEEE; IEEE, 2013. [Google Scholar]
- Satyanarayana, Y.; Nitheesh, Th. Segmentation and classification of shallow sub bottom acoustic data, using image processing and neural networks. Marine Geophysical Research 2014, 35, 149–156. [Google Scholar]
- Hyeonwoo, C.; Gu, J.; Joe, H.; Asada, A.; Yu, S.-C. Acoustic beam profile-based rapid underwater object detection for an imaging sonar. Journal of Marine Science and Technology 2015, 20, 180–197. [Google Scholar]
- Picard, L.; Alexandre Baussard, A.; Le Chenadec, G.; Quidu, I. Seafloor characterization for ATR applications using the monogenic signal the intrinsic dimensionality. OCEANS 2016 MTS/IEEEMonterey; IEEE. [CrossRef]
- Divinsky, B.V.; Kosyan, R.D. Spectral structure of surface waves and its influence on sediment dynamics. Oceanologia 2019, 61, 89–102. [Google Scholar] [CrossRef]
- Tęgowski, J. Acoustical classification of the bottom sediments in the southern Baltic Sea. Quaternary International 2005, 130, 2005–153. [Google Scholar] [CrossRef]
- Fezzani, R.; Berger, L. Analysis of calibrated seafloor backscatter for habitat classification methodology and case study of 158 spots in the Bay of Biscay and Celtic Sea. Marine Geophysical Research 2018, 39, 169–181. [Google Scholar] [CrossRef]
- Evangelos, A.; Snellen, M.; Simons, D.; Siemes, K.; Greinert, J. Multi-angle backscatter classification and sub-bottom profiling for improved seafloor characterization. Marine Geophysical Research 2018, 39, 289–306. [Google Scholar]
- Huang, Z.; Siwabessy, J.; Cheng, H.; Nichol, S. Using multibeam backscatter data to investigate sediment-acoustic relationships. Journal of Geophysical Research: Oceans 2018, 123, 4649–4665. [Google Scholar] [CrossRef]
- Fonseca, L.; Calder, B. Geocoder: An efficient Backscatter map constructor. An Efficient Backscatter Map Constructor. [Online]. 2005. [Google Scholar]
- Anderson, J.T.; Holliday, D.V.; Kloser, R.; Reid, D.G.; Simard, Y. Acoustic seabed classification: current practice and future directions. ICES Journal of Marine Science 2008, 65, 1004–1011. [Google Scholar] [CrossRef]
- Chakraborty, B.; Kodagali, V.; Baracho, J. Sea- Using Multibeam Echo-Sounding Angular Backscatter floor classification Data: A Real-Time Approach Employing Hybrid Neural Network Architecture. IEEE Journal of Oceanic Engineering 2003, 28. [Google Scholar] [CrossRef]
- Van Komen, D.F.; Neilsen, T.B.; Knobles, D.P.; Badiey, M. A feedforward neural network for source range and ocean seabed classification using time-domain features. Proceedings of meetings on acoustics 2019, 36. [Google Scholar]
- Van Komen, D.F.; Neilsen, T.B.; Knobles, D.P. A convolutional neural network for source range and ocean seabed classification using pressure time-series. Proceedings of meetings on acoustics; 2019; 36. [Google Scholar]
- Van Komen, D.F.; Neilsen, T.B.; Howarth, K.; Knobles, D.P.; Dahl, P.H. Seabed and range estimation of impulsive time series using a convolutional neural network. The Journal of the Acoustical Society of America 2020, 147. [Google Scholar] [CrossRef]
- Frederick, C.; Villar, S.; Michalopoulou, Z.-H. Seabed classification using physics-based modelling and machine learning. The Journal of the Acoustical Society of America 2020, 148. [Google Scholar]
- Cui, X.; Liu, H.; Fang, M.; Ai, B.; Ma, D.; Yang, F. Seafloor habitat mapping using multibeam bathymetric and backscatter intensity multi-features SVM classification framework. Applied acoustics 2021, 174. [Google Scholar] [CrossRef]
- Cui, X.; Yang, F.; Wang, X.; Ai, B.; Luo, Y.; Ma, D. Deep learning model for seabed sediment classification based on fuzzy ranking feature optimization. Marine Geology 2021, 432. [Google Scholar] [CrossRef]
- Zhu, Z.; Cui, X.; Zhang, K.; Ai, B.; Shi, B.; Yang, F. DNN-based seabed classification using differently weighted MBES multifeatures. Marine Geology 2021, 438. [Google Scholar] [CrossRef]
- Kushnir, U. ; Frid VSpectral Acoustic Fingerprints of Sand Sandstone Sea Bottoms, J. Mar. Sci. Eng. 2022, 10, 1923. [Google Scholar] [CrossRef]
- Hastie, T.; Tibshirani, R.; Friedman, J. The Elements of Statistical Learning: Data Mining, Inference, and Prediction, Second Edition. ed; Springer, 2009. [Google Scholar]
- Steinbuch, L.; Brus, D.J.; Heuvelink, G.B.M. Mapping the probability of ripened subsoils using Bayesian logistic regression with informative priors. Geoderma 2018, 316, 56–69. [Google Scholar] [CrossRef]
- Tynan, C.T.; Ainley, D.G.; Barth, J.A.; Cowles, T.J.; Pierce, S.D.; Spear, L.B. Cetacean distributions relative to ocean processes in the northern California Current System. Deep-Sea Research II 2005, 52, 145–167. [Google Scholar] [CrossRef]
- Singh, S.; Rao, M.J.; Baranval, N.K.; Kumar, K.V.; Kumar, Y.V. Geoenvironment factors guided coastal urban growth prospect (UGP) delineation using heuristic and machine learning models. Ocean and Coastal Management 2023, 236, 106496. [Google Scholar] [CrossRef]
- Maxwell, D.L.; Stelzenmüller, V.; Eastwood, P.D.; Rogers, S.I. Modelling the spatial distribution of plaice (Pleuronectes platessa), sole (Solea solea) and thornback ray (Raja clavata) in UK waters for marine management and planning. Journal of Sea Research 2009, 61, 258–267. [Google Scholar] [CrossRef]
- Zhang, T.; Yan, L.; Han, G.; Peng, Y. Fast and Accurate Underwater Acoustic Horizontal Ranging Algorithm for an Arbitrary Sound-Speed Profile in the Deep Sea. IEEE internet of things journal 2022, 9, 755–769. [Google Scholar] [CrossRef]
- McCormack, B.; Borrelli, M. ShallowWater Object Detection, Classification, and Localization via Phase-Measured, Bathymetry-Mode Backscatter. Remote Sens. 2023, 15, 1685. [Google Scholar] [CrossRef]
- Raja, N.B.; Cicek, I.C.; Turkoglu, N.; Aydin, O.; Kawasaki, A. Landslide susceptibility mapping of the Sera River Basin using logistic regression model. Nat Hazards 2017, 85, 1323–1346. [Google Scholar] [CrossRef]
- Yeasin, Md.; Haldar, D.; Kumar, S.; Kumar Paul, R.K.; Ghosh, S. Machine Learning Techniques for Phenology Assessment of Sugarcane Using Conjunctive SAR and Optical Data. Remote Sens. 14, 3249. [Google Scholar] [CrossRef]
Figure 1.
Enlarged signatures of 1st arrival of the reflected signal. a sand, b Sandstone.
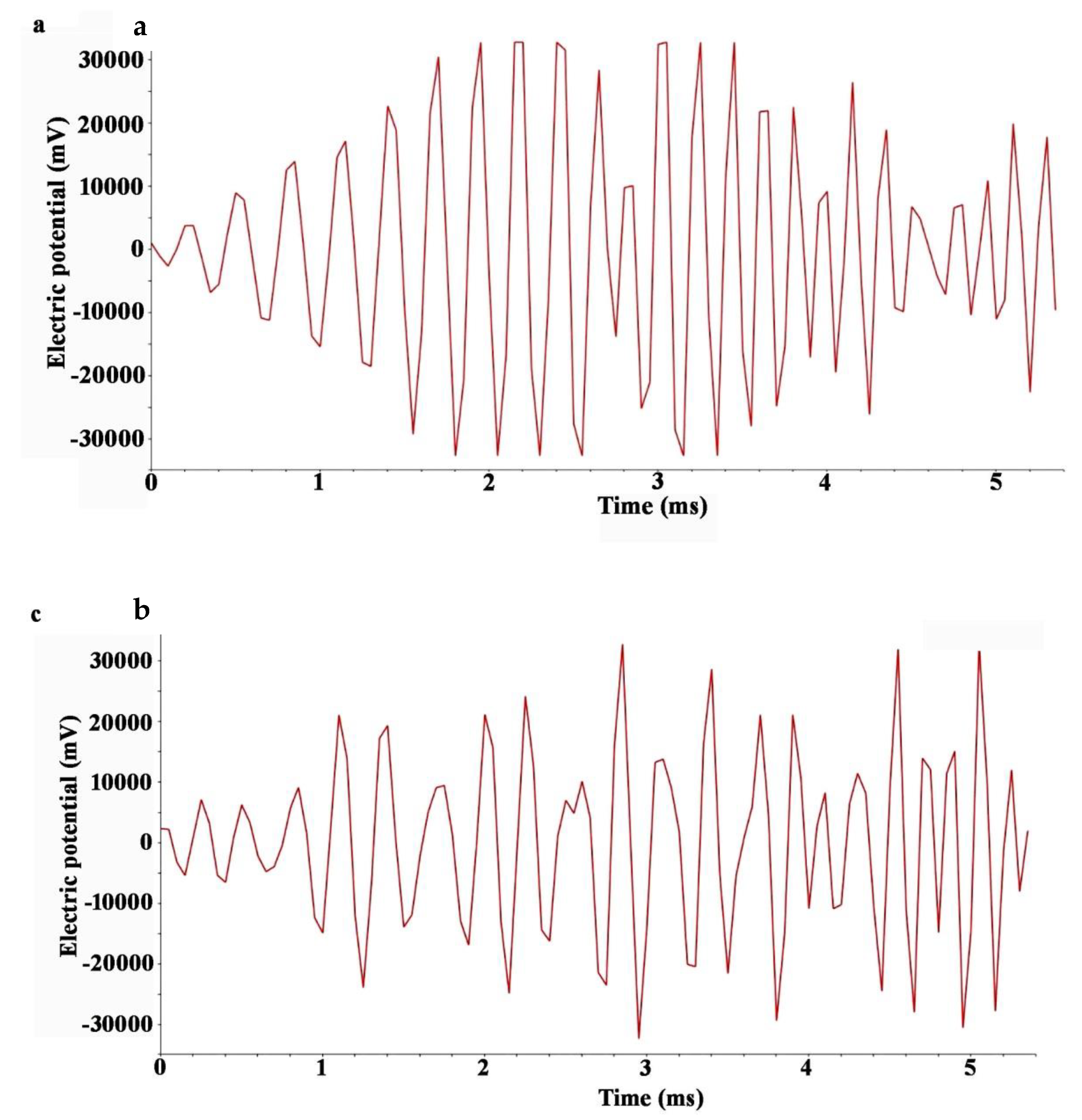

Table 1.
Transmission Parameters
| Site: | Site 1 | Site 2 | Site 3 | Site 4 |
|---|---|---|---|---|
| Soil Type | Sand | Sand | Sandstone | Sandstone |
| Depth | 26m | 26m | 33m | 33m |
| Transducer depth | 1m | 1m | 1m | 1m |
| Transmission power | -18dB | -18dB | -18dB | -18dB |
| Water Sound Velocity [m/s] | 1530 | 1530 | 1530 | 1530 |
| Recorded Signal duration [ms] | 100 | 100 | 100 | 100 |
Table 2.
Confusion matrices for the trained model: (a) spectra training set; (b) spectra verification set; (c) time-series training set; (d) time series verification set.
Table 2.
Confusion matrices for the trained model: (a) spectra training set; (b) spectra verification set; (c) time-series training set; (d) time series verification set.
| a | |||
| Actual | Predicted rock | Predicted sand | |
| Rock & Sand | 450 | 137 | 313 |
| Rock | 150 | 133 | 17 |
| Sand | 300 | 4 | 296 |
| b | |||
| Actual | Predicted rock | Predicted sand | |
| Rock & Sand | 150 | 55 | 95 |
| Rock | 50 | 48 | 2 |
| Sand | 100 | 7 | 93 |
| c | |||
| Actual | Predicted rock | Predicted sand | |
| Rock & Sand | 450 | 138 | 312 |
| Rock | 150 | 134 | 16 |
| Sand | 300 | 4 | 296 |
| d | |||
| Actual | Predicted rock | Predicted sand | |
| Rock & Sand | 150 | 39 | 111 |
| Rock | 50 | 37 | 13 |
| Sand | 100 | 2 | 98 |
Table 3.
Accuracies vs the relative size of the spectral training set (no training examples divided by no of features).
Table 3.
Accuracies vs the relative size of the spectral training set (no training examples divided by no of features).
| Relative training set size | 1.64 | 2.05 | 2.45 | 2.86 | 3.27 | 3.68 | 4.09 |
| Maximal accuracy over the verification set | 67.33 | 74.67 | 84.67 | 84.67 | 84.67 | 89.33 | 94.00 |
| Maximal accuracy over training set | 87.67 | 96.00 | 95.56 | 96.83 | 96.11 | 95.06 | 95.33 |
| Number of iterations to achieve maximal accuracy over both sets | 20 | 90 | 120 | 160 | 160 | 220 | 210 |
| Regularization parameter for maximal accuracy | 10 | 0 | 0 | 0 | 0 | 0 | 0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



