
Submitted:
17 May 2023
Posted:
22 May 2023
You are already at the latest version
Abstract
Variable Angle Tow (VAT) laminates offer a promising alternative to classical straight fiber composites in terms of design and performance.
However, analyzing these structures can be more complex due to the introduction of new design variables.
Carrera's Unified Formulation (CUF) has been successful in previous works for buckling,
vibrational, and stress analysis of VAT plates.
Typically, one-dimensional (1D) and two-dimensional (2D) CUF models are used,
with a linear law describing the fiber orientation variation in the main plane of the structure.
The objective of this article is to expand the CUF 2D plate finite elements
family to perform free vibration analysis of composite laminated plate structures with curvilinear fibers.
The primary contribution is the application of Reissner's Mixed Variational Theorem (RMVT) to a CUF finite element model.
The Principle of Virtual Displacements (PVD) and RMVT are both used as variational statements for the study of monolayer and multilayer VAT plates dynamic behavior.
The proposed approach is compared to Abaqus three-dimensional (3D) reference solutions,
classical theories and literature results to investigate the effectiveness of the developed models.
Results demonstrate that mixed theories provide the best approximation of the reference solution in all cases.
Keywords:
Free Vibration Analysis
; Finite Element Method
; Variable Angle Tow Plates
; Carrera's Unified Formulation
; Reissner's Mixed Variational Theorem
1. Introduction
Over the last decades, composite structures have shown interesting properties for aerospace applications, because of their high stiffness-to-weight ratio. Despite this, a common thought is that the potential of fiber reinforced structures could be better exploited by improving the directional properties through the variation of fibers angle along the in-plane directions. The choice to keep the fibre orientation constant in each layer is particularly restrictive for geometries which present geometrical discontinuities like cut-outs. VAT plates are characterized by an in-plane variation of fibres angle, allowing to expand the design space of a specific structure. This is particularly useful for optimization problems, where a wider design space can affect positively the search of an optimal solution. For example, in the context of vibrational analyses, the maximization of fundamental frequencies can be improved by using curvilinear fibres. The complexity of analysis is one of the main disadvantages of VATs, because a greater number of unknowns must be taken into account and unfeasible fibres patterns could be obtained during the optimization process.
Several methods for the study of VATs mechanical response are available in the literature. In the following text, a brief review of these approaches is presented, with a particular focus on free vibration analyses. To the best of authors’ knowledge, the first works that have been presented on the topic were based on the assumption of constant fibers angle within each element in a Finite Element Method (FEM) solution. Therefore, the continuous variation of fibres direction was approximated in a step-wise discrete way. This approach can be used in commercial FEM software tools that, at the moment, cannot handle a continuous fiber variation. Hyer and Charette [1] and Hyer and Lee [2] used this method to improve VATs tensile strength and buckling response, respectively. One of the main disadvantages of this step-wise approach is that, as the true variation is continuous, the discrete representation of fibers angle variation imposes a further approximation. A p-version FEM based on the Third-order Shear Deformation Theory (TSDT) was applied to preform vibrational analyses by Akhavan and Ribeiro [3]. Results showed that fibres variation allows to increase (or decrease) natural frequencies and that thin plates are more affected by this phenomenon if compared with thick ones. Ribeiro and Akhavan [4] used the p-version FEM approach with elements based on the First-Order Shear Deformation Theory (FSDT) to perform non-linear vibration analyses. The advantage of the p-version of the FEM is that the accuracy of the approximation is improved by increasing the order of shape functions over the elements. Vibration analyses were performed on VAT plates with a central circular cut-out considering parabolic fibres by Hachemi et al. [5]. Zhao and Kapania [6] investigated the free vibration of prestressed VAT stiffened plates where plates and stiffeners were modeled separately through Mindlin plate theory and Timoshenko beam theory, respectively. The compatibility conditions at the interface between plate and stiffeners were satisfied by using a transformation matrix. Honda and Narita [7] used the classical plate theory within the Ritz method in order to evaluate the natural frequencies and vibrational modes. An experimental approach was used in Rodrigues et al. [8] for the free vibration analysis of a plate with free boundary conditions subjected to random excitation via an electromagnetic shaker. Subsequently, the results were compared to the ones obtained through FEM, where a four-node isoparametric element based on the Reissner-Mindlin theory was used. Stodieck et al. [9] showed that curvilinear fibres can be useful for improving the aero-elastic response of composite wings. The Rayleigh-Ritz method and classical lamination theory were used to develop a 1D beam model, considering the assumption of null chamber deformation of the wing chord-wise section. The aero-elastic response was computed by introducing quasi-static aerodynamic forces in a model developed for the plate structural analysis. A parametric study showed that by using VATs it is possible to influence wing response both positively and negatively.
Curvilinear fibres can improve the modal response as shown in several works. Abdalla et al. [10] used the classical lamination theory in combination with a successive approximation method in order to solve an optimization problem. Results showed that curvilinear fibres increased the optimal fundamental frequency in comparison with straight ones. A similar approach was presented in Blom et al. [11], where the maximization of the first natural frequency considering manufacturing constraints was obtained for VAT conical shells. In Carvalho, Sohouli et al. [12], a genetic algorithm and shell elements based on FSDT were used for the maximization of the fundamental frequency. The Multi-Scale Two-Level (MS2L) approach allows to split the optimization problem in two parts. The composite is modeled as an equivalent homogeneous anisotropic plate in the first step, which aims to find the ideal distribution of the polar parameters that represent the mechanical design variables. The main goal of a second step is to establish the best stacking sequence in relation to the mechanical properties distribution that has been obtained in the first step. The MS2L method was applied by Montemurro and Catapano [13] to VAT plates in order to optimize the buckling response. In order to evaluate the polar parameters, B-spline surfaces were introduced, while manufacturing constraints were considered during the second step. More details about MS2L approach can be find in Catapano et al. [14], Montemurro and Catapano [15] and Fiordilino et al. [16], where both stiffness and buckling optimization problems were solved.
VAT structures have also been studied by using Carrera’s Unified Formulation, which allows to use an arbitrary expansion order along the thickness of the plate. In this way, both Equivalent Single Layer (ESL) and Layer-Wise (LW) models can be obtained in the context of a specific predefined variational statement, as shown in Carrera [17,18]. Carrera et al. [19] used CUF in order to develop a Navier closed-form solution for the static analysis of isotropic plates under several loading conditions. The same approach was used in Carrera and Giunta [20] in order to perform failure analyses on isotropic plates. A further extension of this method was shown in Giunta et al. [21], where the indentation failure analysis of composite sandwich plates was performed. Giunta et al. [22] performed free vibration analyses of composite beams. In Viglietti et al. [23] and Fallahi et al. [24], free vibration and buckling analyses of VATs were performed through the use of a 1D CUF model. Within this framework, shell models were developed as well for VAT cases in order to perform stress analyses, see Sánchez-Majano et al. [25]. In Pagani and Sánchez-Majano [26,27] and Sánchez-Majano et al. [28], manufacture defects were taken into account by using stochastic techniques. Vescovini and Dozio [29] used the Ritz method within CUF for vibrational and buckling analyses. A generalization of CUF was developed in order to allow the use of different expansions for every component of the displacement vector. Demasi et al. [30] applied this approach to the study of VAT plates with an ESL model. A further advantage of CUF is that it can be used in combination with different variational statements. An alternative to the classic PVD is represented by the RMVT, where both displacements and transverse out-of-plane stresses are considered as primary variables. RMVT has been widely used within CUF for the study of straight fibres composite structures. For example, Carrera and Demasi [31,32] developed RMVT-based CUF models to perform the static analysis of straight fibres plates.
Within the free vibration analysis context, CUF has been applied to the study of VATs considering as variational statement mainly the PVD. For this reason, this work aims to extend this framework with the RMVT formulation in order to develop a family of hierarchical plate finite elements. This will allow to better predict the natural frequencies of composite plates characterized by curvilinear fibres. Section 2 shows the theoretical derivation for free vibration problems. Section 3 presents the numerical results where three cases are investigated. Analyses are performed considering for varying side-to-thickness ratio in order to investigate thin and thick plates and discuss the differences between models based on PVD or RMVT statements. Results are compared towards reference solutions for validation. Concluding observations and remarks are presented in Section 4.
2. Carrera’s Unified Formulation
A plate is flat body whose material points lay in the Cartesian closed point subset
of the three-dimensional space where , , a and b are the dimensions along the two in-plane axes and h measure its thickness along the z-axis and where and b. The global reference system and plate geometry are presented in Figure 1. The displacement field is expressed as:
The strain vector can be divided in two parts, which represent the in-plane and out-of-plane components:
The hypothesis of small displacements allows to use a linear strains-displacements relation:
where and are the following differential operators:
The stress vector is expressed in a similar manner:
Hooke’s law reads:
where the terms , , and are subcomponents of a material stiffness according to the stress and strain ordering in Equations (3) and (6) where the fibres lay in and they are not, in general, aligned with the x-axis. stands for the stiffness matrix in the global reference system and its components can be written in terms of the young moduli and , shear moduli and and Poisson’s ratios and where subscripts L and T stand for the direction parallel and perpendicular to the fibres, respectively. For further details see Reddy [33].
2.1. Variable Stiffness Composite Plates
Laminated VAT structures are considered in this work. For this reason, the material stiffness coefficients can change layer-wise along the thickness and point-wise along the in-plane directions. The mapping of into reads:
Superscript T stands for the transpose operator. The matrix represents a rotation matrix that depends on an in-plane rotation angle . For the sake of brevity, the components of and are not reported here, they can be found in Reddy [33]. in a laminated VAT, the rotation angle is a bi-dimensional field in . In this work, two different variation laws are considered for , a linear variation law and a parabolic one. The linear law can be expressed according to the following formula:
The angle describes the original direction along which varies, is a generic spatial variable defined as
where and denote a generic in-plane reference system where is measured. and are the angles between the -axis and the tangent to a fiber for equal to zero and d, respectively, see Figure 2. As shown in the figure, the fibres angle is always measured with respect to the -axis. Further details about the fibres linear variation law can be found in Gürdal et al. [34]. The parabolic law can be expressed according to the following equation:
The parameter is used to control the shape of the parabola and it is related to the final fibres angle as . More details about the parabolic fibres path can be found in Hachemi et al. [5] and Honda et al. [35]. The following notation, based upon the above introduced parameters, is used in order to describe the in-plane linear and parabolic fibres behavior: .
2.2. Variational Statements
PVD and RMVT variational statements are considered to derive the governing equations for the free vibration problem for a laminated VAT plate. The fundamental distinction is that the RMVT considers the vector of the out-of-plane stresses as a primary unknown, whereas the PVD considers only displacements as primary variables. For the PVD case, the following variational statement applies:
where the subscript G refers to the components obtained from the geometrical relations in Equation (4), subscript H refers to the components obtained from Hooke’s law in Equation (7). is the in-plane middle surface of the plate and is the inertial work. stands for a virtual variation. For the RMVT case, the variational statement is:
The M subscript refers to the transverse stress components considered as primary unknowns in the mixed formulation. For the RMVT formulation, Hooke’s law is rewritten as follows:
where , , and are, see Carrera and Demasi [31]:
The superscript “" indicates the inverse of a matrix. The inertial work can be expressed as:
where is the plate material density and represents the acceleration vector.
2.3. Kinematic Assumptions
CUF uses an axiomatic approach along the through-the-thickness direction to represent the primary unknowns, see Carrera [18]. The generic unknown component is approximated as:
where f is a displacement component in a formulation derived from the PVD, but it can also be an out-of-plane stress component when a RMVT formulation is considered. is an approximation function in and is an unknown two-dimensional function in . According to Einstein’s notation, a twice repeated index implies a sum over the index range. Finally, N is the approximation order. Both N and are a-priori defined . This feature of CUF allows to obtain multiple theories in the same formulation. Within CUF, ESL or LW models can be also obtain depending of the support of : in a ESL model , whereas for a LW model where such that and for with k, being the total number of laminae and the thickness of a generic k lamina such that . The number of unknowns in the ESL case is independent of number of layers in the lamination since the approximation is imposed globally over . The total stiffness contributes can be seen as a weighted average of each layer stiffness along the thickness. Taylor’s polynomials are considered for the ESL models:
where N is the expansion order. The computational cost of ESL models depends on N only and, for a given N, it is lower than a LW model since this latter depends on the total number of layers in the lamination. ESL are suitable for relatively thick laminates. However, they are unable to accurately predict the behavior of thick plates with a high degree of anisotropy. ESL model have -continuity over because of the used approximation functions, whereas laminated composites presents a -continuity since the interface between to layers of different materials introduces a change in the slope of the displacements (also known as zig-zag displacements through-the-thickness variation). This behavior can be accommodated within an ESL theory by means of Murakami’s function. This approach is not here considered, for more details refer to Carrera [36]. In a LW model, kinematics of each layer is formulated independently:
where subscripts b and t stand for layer bottom and top, respectively. Congruency at the interface is retrieved via a through-the-thickness assembly procedure similar to that used in the finite element method. For this reason, Lagrange polynomials (which ensure partition of unity) or the following linear combination of Legendre polynomials:
are, typically, used as approximation functions over . In Equation (20), and is an i-order Legendre polynomial. Equation (20) create a base where and are the two linear Lagrange polynomials and are a kind of p-version enriching functions since they do not contribute to a base linear combination for being, by definition, . Since LW base functions have local support, inter-layer -continuity for layers made of different materials is ensured but the computational costs are higher than for ESL models.
2.4. Acronym System
An acronym system is used in order to identify all the derived theories. Figure 3 shows this system. The first letter addresses the approximation level that is applied: ‘E’ denotes ESL models, whereas ‘L’ denotes LW models. The second letter denotes the variational statement: PVD or RMVT are denoted by ‘D’ or ‘M’, respectively. The last number is the order of expansion along the plate thickness. A number at the beginning of the acronym , when present, indicates how many virtual layers have been used to approximate each physical layer in a LW model to improve results for a given approximation order. If this number is not present, only one virtual layer has been used to represent each physical layer.
As an example, in EDN models, the displacement field can be expressed as:
In a vectorial form:
being and . Additionally, classical theories can be been taken into account. Classical Lamination Theory (CLT) and First-order Shear Deformation Theory are obtained as a particular case of a first-order ESL theory. FSDT is obtained through the penalization of the term, while for CLT also transverse shear stresses are disregarded by using a fictitiously high value of the material shear moduli. The material stiffness matrix is needs to be reduced in a plane-stress sense to overcome thickness locking.
For LDN solutions, only displacements are considered as primary variables:
For LMN solutions, also transverse stresses are treated as primary variables. Indeed, the transverse stresses field can be expressed as:
It can be observed that ESL theories can be considered as a particular case of LW ones. While in the first case the integration along the thickness is performed in order to represent composite’s properties through an unitary layer, for the second case the integration is computed layer by layer. This allows to represent the kinematic of each layer separately for LW models. LDN solutions are obtained with Lagrange polynomials with equally spaced nodes, whereas LMN ones are obtained with Legendre polynomials.
2.5. FE Stiffness Matrices
As far as a FEM solution is concerned, the in-plane domain is discretized into subdomains such as and and for . Shape functions are then introduced for the approximation of the variation over . In the case of a bi-dimensional model, Equation (17) becomes:
where stands for the shape functions and is the number of nodes in the used finite element. Classical Lagrangian shape functions are used. They are not here presented for the sake of brevity but they can be found in Bathe [37]. FE stiffness matrices are obtained by the a weak form of the variational principles. In the PVD case, considering Equation (25) the displacements field can be written as:
Through the substitution of Equations (4), (7) and (26) into Equation (12), the weak PVD form can be obtained:
where:
An axis coordinate as comma preceded subscript stands for a derivative in that coordinate direction. In a compact vectorial form, Equation (27) reads:
where and are Fundamental Nuclei (FN) of the stiffness and mass matrices, respectively. Through the cycles on the indices , it is possible to build the stiffness and mass matrices of a finite element. The components of the stiffness FN for the PVD case can be written as:
The mass FN can be written as:
It is possible to observe that is a diagonal matrix and that, since the plate density is assumed to be constant, the term can be placed outside the integral.
In the RMVT case, also transverse stresses are a priori approximated:
Through the substitution of Equations (4), (14), (26) and (33) into Equation (13), the RMVT weak form can be obtained:
where:
In a compact form:
In this case four fundamental nuclei are obtained. The components of the FN for the RMVT case can be written as:
The mass FN is the same way of the PVD case, see Equation (32). Since the in-plane integrals are calculated via Gauss quadrature, it is crucial to consider an appropriate number of Gauss points, in accordance with the variational rule of fibers angle.
3. Numerical Results and Discussion
Three cases are analyzed in this work: a cantilever monolayer plate, a clamped multilayer plate and a clamped multilayer plate with a central circular cut out. For each case, a square geometry is considered ( m). Parametric studies are performed considering different side-to-thickness ratios (). Material properties are represented in Table 1 for all the considered analysis case. Reference solutions are represented by an Abaqus 3D model where quadratic elements (C3D20R) have been used. For CUF solutions, nine-node square elements are used. For each case study, a preliminary convergence analysis is carried out to identify the appropriate mesh for both CUF and Abaqus solutions.
3.1. Monolayer plate
The first case corresponds to a cantilever monolayer plate with density kg/m. For this problem axes and of angle reference system are coincident with axes x and y of the plate. For this reason the length parameter in Equation (9) corresponds to . It is assumed that fibres angle is a linear function of , see Equation (9). Angle variational law in this case can be expressed as and it is represented in Figure 4. This law has been taken from Viglietti et al. [23]. Reference solution contains 80 elements along each in-plane side and 12 elements along the thickness. The only clamped side of the plate is the one that lays on the plane, in correspondence of , where fibres form an angle of with x axis. For CUF results a mesh is considered. Table 2 shows the Degrees Of Freedom (DOF) for some considered solutions. It is possible to observe that higher-order CUF models allow a DOF reduction of one order of magnitude in comparison with the Abaqus 3D reference solution. Table 3 shows the first five natural frequencies for . For this case, classic and higher-order theories show all a very good approximation of the reference solution the maximum difference from the reference solution being for the second natural frequency computed via CLT. Table 4 shows the first five natural frequencies for . It is possible to observe that classical theories and lower-order ESL ones are now less accurate, specially for the prediction of higher frequencies. For example CLT, FSDT and ED2 models, in correspondence of the third natural frequency, present a percentage error equal to , and , respectively. This can be explained by considering that the side-to-thickness ratio corresponds to a thick plate. In this case, higher-order theories are needed to obtain an accurate approximation. Since a moderately thick plate is considered, transverse shear stresses affect the solution. This is the reason why CLT, which neglects those stresses, is less close to the reference solution. The best approximations of plate natural frequencies are given by 2LM2 and 3LM4 mixed theories, which show a maximum percentage errors of each for the fourth natural frequency. In particular, it is possible to observe that the 2LM2 solution is globally closer to Abaqus in comparison with the 3LD4 solution, even if the last one is characterized by an higher number of degrees of freedom. Table 5 shows the first five natural frequencies for . Because of the low side-to-thickness ratio, a very thick plate is considered and lower-order theories do not provide a correct prediction of the natural frequencies. In this case, the inversion of the sixth mode with the fifth one is observed for the CLT model and a corresponding percentage error as high as . On the other hand, a 3LM4 model matches Abaqus reference results.
3.2. Multilayer plate
The second case is taken from Viglietti et al. [23] and corresponds to a multilayer clamped plate with density kg/m. The plate is composed by three layers with the same thickness. It is assumed that fibres angle is a function of . Also in this case, a linear law is considered for fibres path, according to Equation (9). For this problem axes and of angle reference system are aligned with axes x and y of the plate, but their origin is placed on the center of the plate (). In this case has been considered as length parameter in Equation (9). The lamination of the plate is for layer 1, for layer 2 and for layer 3. The stacking sequence is represented in Figure 5. As for the previous case, the Abaqus reference solution contains 80 elements along each side and 12 elements along the thickness. For CUF results a mesh is considered. Table 6 shows the first five natural frequencies for , together with the results presented in Viglietti et al. [23]. In this case the best approximation is given by LM2 and LM4 theories. LM2 and LM4 models have both a maximum percentage error as high as in correspondence of the third frequency. Also classical and low-order theories provide good results since a thin plate is considered. For this reason, transverse stresses do not play an important role. For example the maximum error given by CLT is for the fifth frequency. The case is presented in Table 7. Here the CLT model shows the inversion of the third and fourth modes. In comparison with the monolayer plate, in this case the modes inversion of the CLT model can be seen for higher side-to-thickness ratios and lower frequencies. For the third-mode, CLT shows a percentage error of , while the best approximation is given by LM4 which has a percentage error of for the same mode. Table 8 shows the first five frequencies for . In this case lower-order theories have an evident loss of accuracy. The CLT model can predict only the first two modes. Also, FSDT and ED2 models show non-negligible errors, which become bigger with the increase of the frequency. On the other hand, mixed models are able to correctly predict the dynamic behavior of the plate for both low and high frequencies.
3.3. Multilayer plate with central hole
Case 3 is taken from Hachemi et al. [5] and corresponds to a multilayer clamped plate that presents a circular cut-out. The center of the cut-out is placed at plate center () and its radius is m. It is assumed that fibres angle is a parabolic function of . Like the previous case, and axes are parallel respectively to x and y, and their origin is placed at the center of the plate. The angle variational law is defined in Equation (11), considering . The plate is composed by two layers which have the same thickness and stacking sequence , see Figure 6. In this case, the Abaqus reference solution is made of 73728 elements: 4608 elements are defined on the plate plane and 16 elements are defined along the thickness. For CUF results, 128 elements are used on the plate plane. Natural frequencies are expressed through a non-dimensional frequency parameter defined as , where is the natural frequency while . Table 9 presents the first five non-dimensional frequencies for . It is possible to observe that the theories show all a good approximation of reference results. Also the percentage errors of FSDT and CLT are less than . Mixed theories match Abaqus results. Table 10 shows the results for in order to compare the Abaqus reference solution with the one presented in Hachemi et al. [5] and the solutions obtained with CUF. As already observed in previous cases, classical theories and, in general low-order ones, are not able to provide an accurate approximation of natural frequencies, because of the low side-to-thickness ratio value. It is also possible to notice that this generate the inversion of modes four and five for the CLT case. On the other hand, the best approximation is given by mixed theories, which are closer to Abaqus solution also for high frequencies. The shapes of the modes have been represented in Figure 7, Figure 8, Figure 9, Figure 10 and Figure 11. The first mode shows a simple bending of the plate on the plane with a single half-wave along each in-plane direction. The second and the third modes show two half-waves in the y and x directions, respectively. Mode number four shows three half-waves along the plate diagonal between x and y axes. The fifth mode shows three half-waves along the y direction. Finally, Table 11 shows the frequencies for . Since a thick plate is considered, the effect of transverse stresses is not negligible, which causes classical and lower-order theories to be inaccurate. This can be observed for CLT, which is not able to predict the fourth and fifth modes and has an error as hugh as for the third mode. Considering FSDT, ED4 and LD4 models, this error can be reduced to , and , respectively.
4. Conclusions
In this paper, a new framework for the dynamic analysis of VAT structures is presented. RMVT is developed within CUF in order to obtain a new family of 2D models for the free-vibration analysis of VAT plates. The results are obtained via either RMVT or PVD and are compared in order to show the effective capabilities of the proposed method in the prediction of VAT plates natural frequencies. Abaqus 3D reference solutions and results from Refs. [5,23] are also included in order to present a validation as wide as possible. Linear and parabolic laws are both considered in order to describe the in-plane path of fibres variation. The possibility to use a polynomial order defined a-priori through CUF, and the introduction of the transverse stresses field as primary variable of the problem through RMVT allow to obtain a valid approach for the prediction of VATs dynamic behavior. After the results analysis, the following remarks can be done:
- Classical theories (FSDT and CLT) provide the best trade off between accuracy and computational costs for thin plates (), whereas they are not able to correctly predict the behavior of thicker plates ( and 5), specially at high frequencies. The loss of accuracy is more evident for CLT results, since this theory does not consider transverse shear stresses, which become important in thick plates. This error is particularly evident in the second and third, where the inversion of modes can be observed.
- PVD results show monotonic convergence to the reference solution: the lower the DOF number, the higher the frequency value. For a given mode, frequencies values decrease when higher-order models are employed, and they get closer to reference solution.
- In all the cases, layer-wise mixed theories yield the best match of the reference 3D solution, independently from the plate geometry or fibres variational law. In every case, a second-order model is more accurate and less computationally expensive than a fourth-order layer-wise PVD model. This is justified by the fact that RMVT considers both displacements and transverse stresses as primary variables, assuring a better approximation of the transverse stresses field into the problem domain improving the overall solution accuracy.
In conclusion, the application of RMVT within CUF has demonstrated significant potential for improving the accuracy and efficiency of modeling VAT plates for free-vibration analyses. The promising results suggest, as future perspectives, the extension to buckling and failure analyses where an accurate and efficient modeling of VAT structures under various loading and operational conditions is required.
Acknowledgments
This research was funded in part by the Luxembourg National Research Fund (FNR), grant reference INTER/ANR/21/16215936 GLAMOUR-VSC. For the purpose of open access, and in fulfillment of the obligations arising from the grant agreement, the author has applied a Creative Commons Attribution 4.0 International (CC BY 4.0) license to any Author Accepted Manuscript version arising from this submission. M. Montemurro is grateful to French National Research Agency for supporting this work through the research project GLAMOUR-VSC (Global–LocAl two-level Multi-scale optimisation strategy accOUnting for pRocess-induced singularities to design Variable Stiffness Composites) ANR-21-CE10-0014.
References
- Hyer, M. W.; Charette, R. F. Innovative design of composite structures: The use of curvilinear fiber format in composite structure design. 1990.
- Hyer, M. W.; Lee, H. H. Innovative design of composite structures: the use of curvilinear fiber format to improve buckling resistance of composite plates with central circular holes. 1990. [Google Scholar]
- Akhavan, H.; Ribeiro, P. Natural modes of vibration of variable stiffness composite laminates with curvilinear fibers. Compos. Struct. 2011, 93, 3040–3047. [Google Scholar] [CrossRef]
- Ribeiro, P.; Akhavan, H. Non-linear vibrations of variable stiffness composite laminated plates. Compos. Struct. 2012, 94, 2424–2432. [Google Scholar] [CrossRef]
- Hachemi, M.; Hamza-Cherif, S. M.; Houmat, A. Free vibration analysis of variable stiffness composite laminate plate with circular cutout. Aust. J. Mech. Eng. 2017. [Google Scholar]
- Zhao, W.; Kapania, R. K. Prestressed vibration of stiffened variable-angle tow laminated plates. AIAA J. 2019, 57, 2575–2593. [Google Scholar] [CrossRef]
- Honda, S.; Narita, Y. Natural frequencies and vibration modes of laminated composite plates reinforced with arbitrary curvilinear fiber shape paths. J. Sound Vib. 2012, 331, 180–191. [Google Scholar] [CrossRef]
- Rodrigues, J. D.; Ribeiro, P.; Akhavan, H. Experimental and finite element modal analysis of variable stiffness composite laminated plates. In Proceedings of the 11th Biennial International Conference on Vibration Problems (ICOVP-2013), 2013, 30. [Google Scholar]
- Stodieck, O.; Cooper, J. E.; Weaver, P. M.; Kealy, P. Improved aeroelastic tailoring using tow-steered composites. Compos. Struct. 2013, 106, 703–715. [Google Scholar] [CrossRef]
- Abdalla, M. M.; Setoodeh, S.; Gürdal, Z. Design of variable stiffness composite panels for maximum fundamental frequency using lamination parameters. Compos. Struct. 2007, 81, 283–291. [Google Scholar] [CrossRef]
- Blom, A. W.; Setoodeh, S.; Hol, J.; Gürdal, Z. Design of variable-stiffness conical shells for maximum fundamental eigenfrequency. Comput. Struct. 2008, 86, 870–878. [Google Scholar] [CrossRef]
- Carvalho, J.; Sohouli, A.; Suleman, A. Fundamental Frequency Optimization of Variable Angle Tow Laminates with Embedded Gap Defects. J. Compos. Sci. 2022, 6, 64. [Google Scholar] [CrossRef]
- Montemurro, M.; Catapano, A. On the effective integration of manufacturability constraints within the multi-scale methodology for designing variable angle-tow laminates. Compos. Struct. 2017, 161, 145–159. [Google Scholar] [CrossRef]
- Catapano, A.; Montemurro, M.; Balcou, J.-A.; Panettieri, E. Rapid prototyping of variable angle-tow composites. Aerotecnica Missili & Spazio 2019, 98, 257–271. [Google Scholar]
- Montemurro, M.; Catapano, A. A general B-Spline surfaces theoretical framework for optimisation of variable angle-tow laminates. Compos. Struct. 2019, 209, 561–578. [Google Scholar] [CrossRef]
- Fiordilino, G. A.; Izzi, M. I.; Montemurro, M. A general isogeometric polar approach for the optimisation of variable stiffness composites: Application to eigenvalue buckling problems. Mech. Mater. 2021, 153, 103574. [Google Scholar] [CrossRef]
- Carrera, E. Theories and finite elements for multilayered, anisotropic, composite plates and shells. Arch. Comput. Meth. Eng. 2002, 9, 87–140. [Google Scholar] [CrossRef]
- Carrera, E. Theories and finite elements for multilayered plates and shells: a unified compact formulation with numerical assessment and benchmarking. Arch. Comput. Meth. Eng. 2003, 10, 215–296. [Google Scholar] [CrossRef]
- Carrera, E.; Giunta, G.; Brischetto, S. Hierarchical closed form solutions for plates bent by localized transverse loadings. J. Zhejiang Univ. Sci. A 2007, 8, 1026–1037. [Google Scholar] [CrossRef]
- Carrera, E.; Giunta, G. Hierarchical models for failure analysis of plates bent by distributed and localized transverse loadings. J. Zhejiang Univ. Sci. A 2008, 9, 600–613. [Google Scholar] [CrossRef]
- Giunta, G.; Catapano, A.; Belouettar, S. Failure indentation analysis of composite sandwich plates via hierarchical models. J. Sandw. Struct. Mater. 2013, 15, 45–70. [Google Scholar] [CrossRef]
- Giunta, G.; Biscani, F.; Belouettar, S.; Ferreira, A. J. M.; Carrera, E. Free vibration analysis of composite beams via refined theories. Compos. Part B Eng. 2013, 44, 540–552. [Google Scholar] [CrossRef]
- Viglietti, A.; Zappino, E.; Carrera, E. Analysis of variable angle tow composites structures using variable kinematic models. Comp. Part B: Eng. 2019, 171, 272–283. [Google Scholar] [CrossRef]
- Fallahi, N.; Viglietti, A.; Carrera, E.; Pagani, A.; Zappino, E. Effect of fiber orientation path on the buckling, free vibration, and static analyses of variable angle tow panels. Facta Univ., Ser. Mech. Eng. 2020, 18, 165–188. [Google Scholar] [CrossRef]
- Sánchez-Majano, A. R.; Azzara, R.; Pagani, A.; Carrera, E. Accurate Stress Analysis of Variable Angle Tow Shells by High-Order Equivalent-Single-Layer and Layer-Wise Finite Element Models. Materials 2021, 14, 6486. [Google Scholar] [CrossRef] [PubMed]
- Pagani, A.; Sánchez-Majano, A. R. Influence of fiber misalignments on buckling performance of variable stiffness composites using layerwise models and random fields. Mech. Adv. Mater. Struct. 2022, 29, 384–399. [Google Scholar] [CrossRef]
- Pagani, A.; Sánchez-Majano, A. R. Stochastic stress analysis and failure onset of variable angle tow laminates affected by spatial fibre variations. Compos. Part C: Open Access 2021, 4, 100091. [Google Scholar] [CrossRef]
- Sánchez-Majano, A. R.; Pagani, A.; Petrolo, M.; Zhang, C. Buckling sensitivity of tow-steered plates subjected to multiscale defects by high-order finite elements and polynomial chaos expansion. Materials 2021, 14, 2706. [Google Scholar] [CrossRef] [PubMed]
- Vescovini, R.; Dozio, L. A variable-kinematic model for variable stiffness plates: Vibration and buckling analysis. Compos. Struct. 2016, 142, 15–26. [Google Scholar] [CrossRef]
- Demasi, L.; Biagini, G.; Vannucci, F.; Santarpia, E.; Cavallaro, R. Equivalent Single Layer, Zig-Zag, and Layer Wise theories for variable angle tow composites based on the Generalized Unified Formulation. Compos. Struct. 2017, 177, 54–79. [Google Scholar] [CrossRef]
- Carrera, E.; Demasi, L. Classical and advanced multilayered plate elements based upon PVD and RMVT. Part 1: Derivation of finite element matrices. Int. J. Numer. Methods Eng. 2002, 55, 191–231. [Google Scholar] [CrossRef]
- Carrera, E.; Demasi, L. Classical and advanced multilayered plate elements based upon PVD and RMVT. Part 2: Numerical implementations. Int. J. Numer. Methods Eng. 2002, 55, 253–291. [Google Scholar] [CrossRef]
- Reddy, J. N. Mechanics of laminated composite plates and shells: theory and analysis. CRC press: 2003.
- Gürdal, Z.; Tatting, B. F.; Wu, C. K. Variable stiffness composite panels: effects of stiffness variation on the in-plane and buckling response. Compos. Part A Appl. Sci. Manuf. 2008, 39, 911–922. [Google Scholar] [CrossRef]
- Honda, S.; Oonishi, Y.; Narita, Y.; Sasaki, K. Vibration analysis of composite rectangular plates reinforced along curved lines. J. Syst. Des. Dyn. 2008, 2, 76–86. [Google Scholar] [CrossRef]
- Carrera, E. On the use of the Murakami’s zig-zag function in the modeling of layered plates and shells. Comput. Struct. 2004, 82, 541–554. [Google Scholar] [CrossRef]
- Bathe, K.-J. Finite element procedures. 2006.
Figure 1.
Plate geometry and reference system.
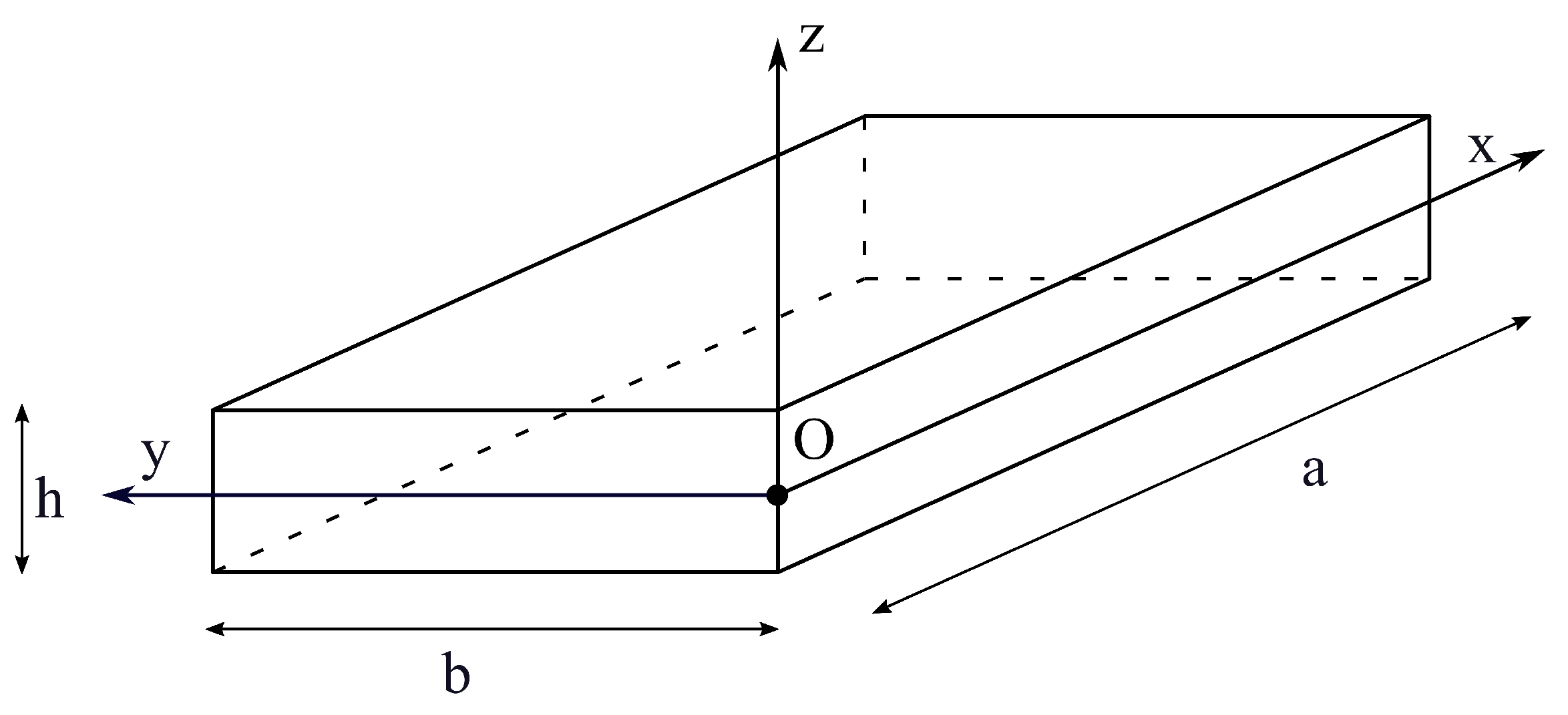
Figure 2.
Example of in-plane fiber orientation.
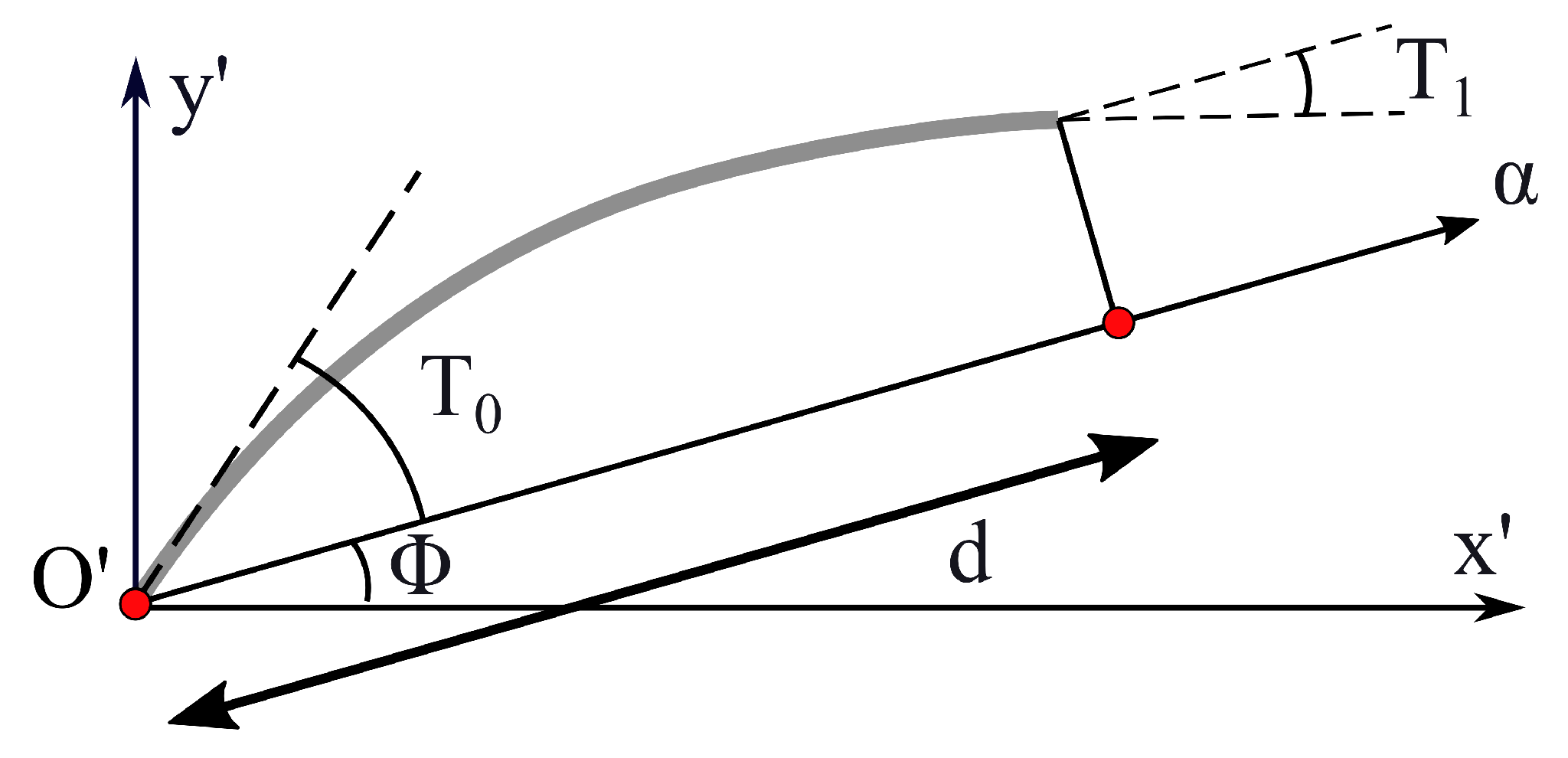
Figure 3.
Acronym system.
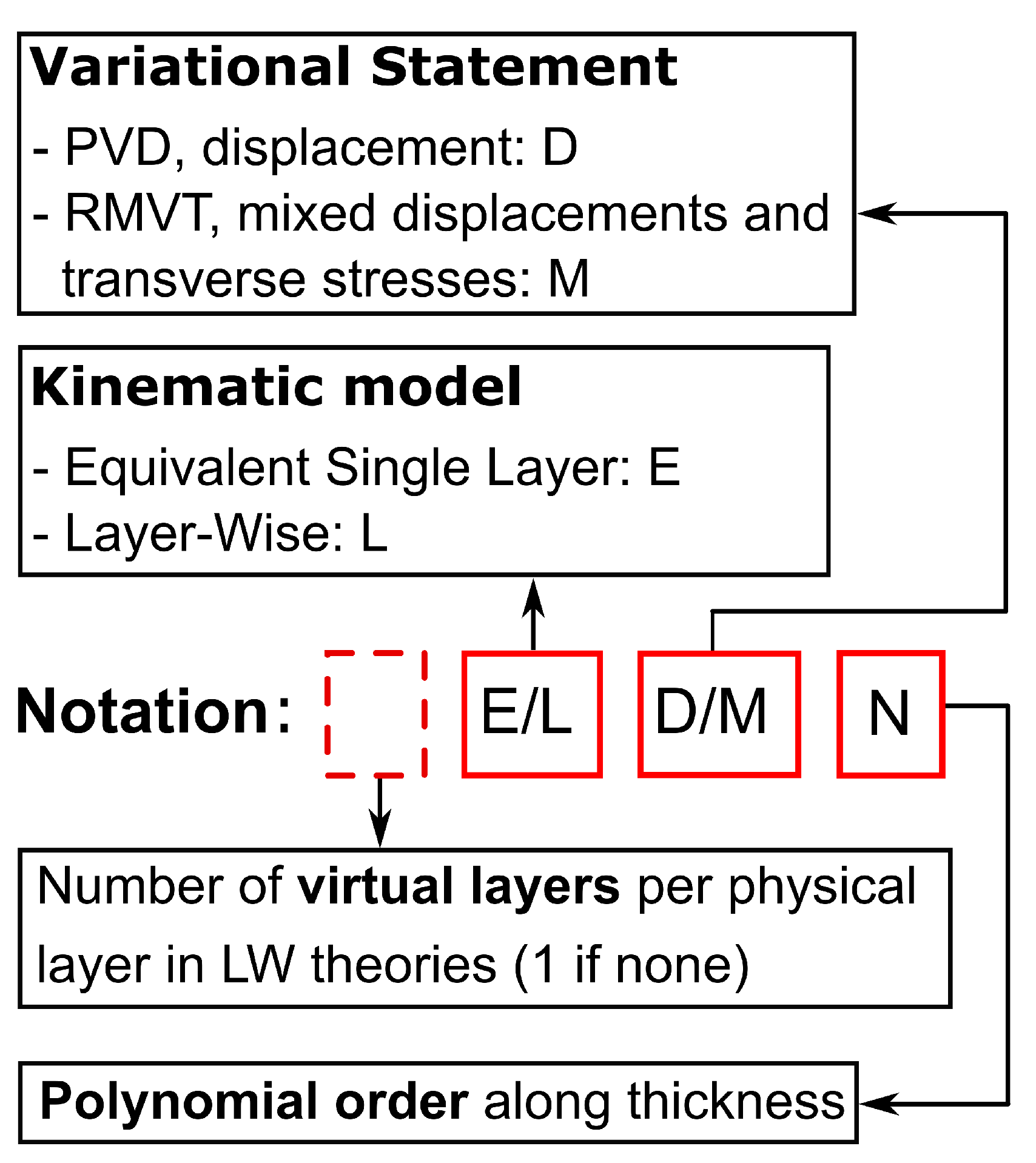
Figure 4.
Stacking sequence, case 1.
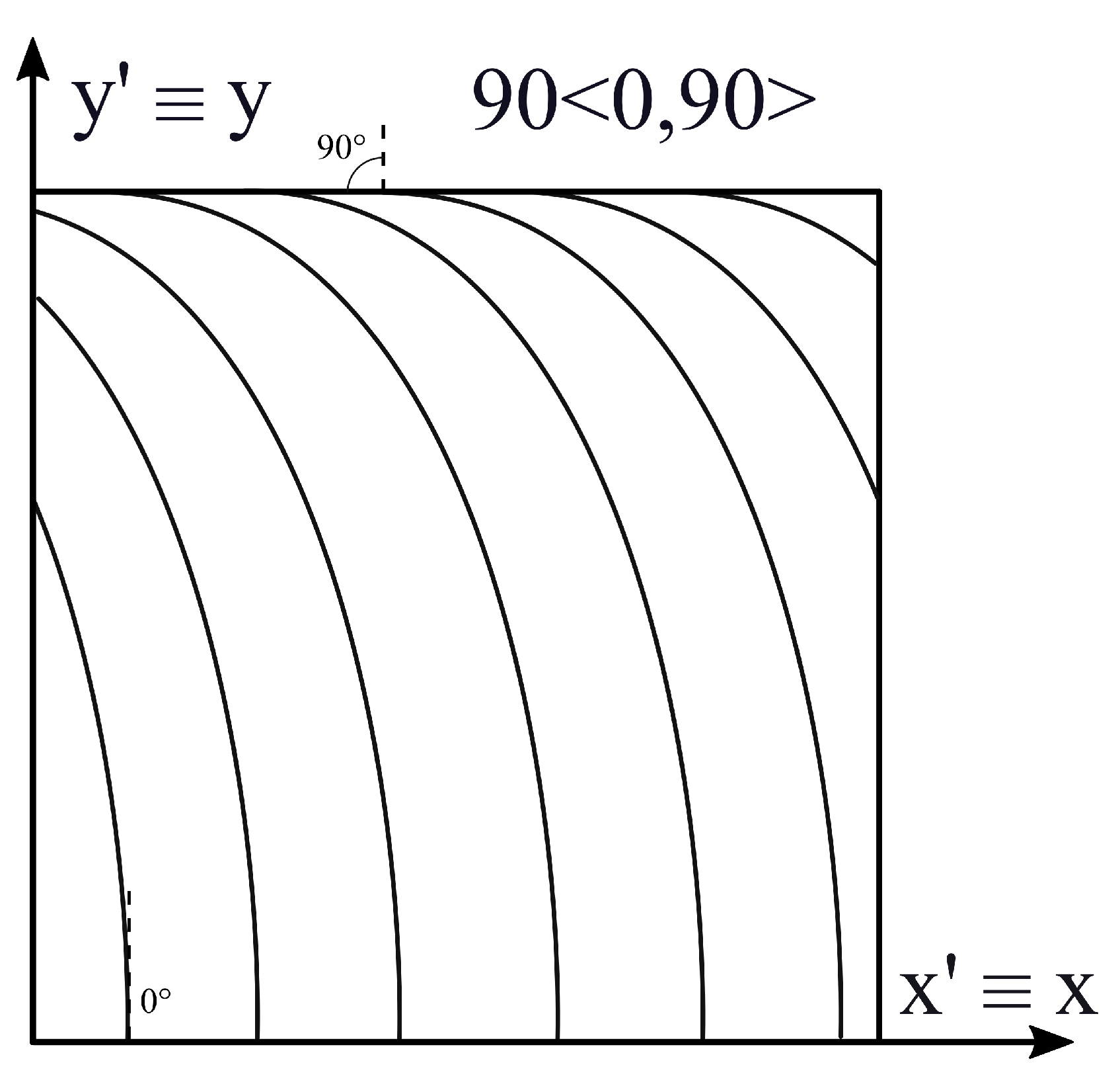
Figure 5.
Stacking sequence, case 2.
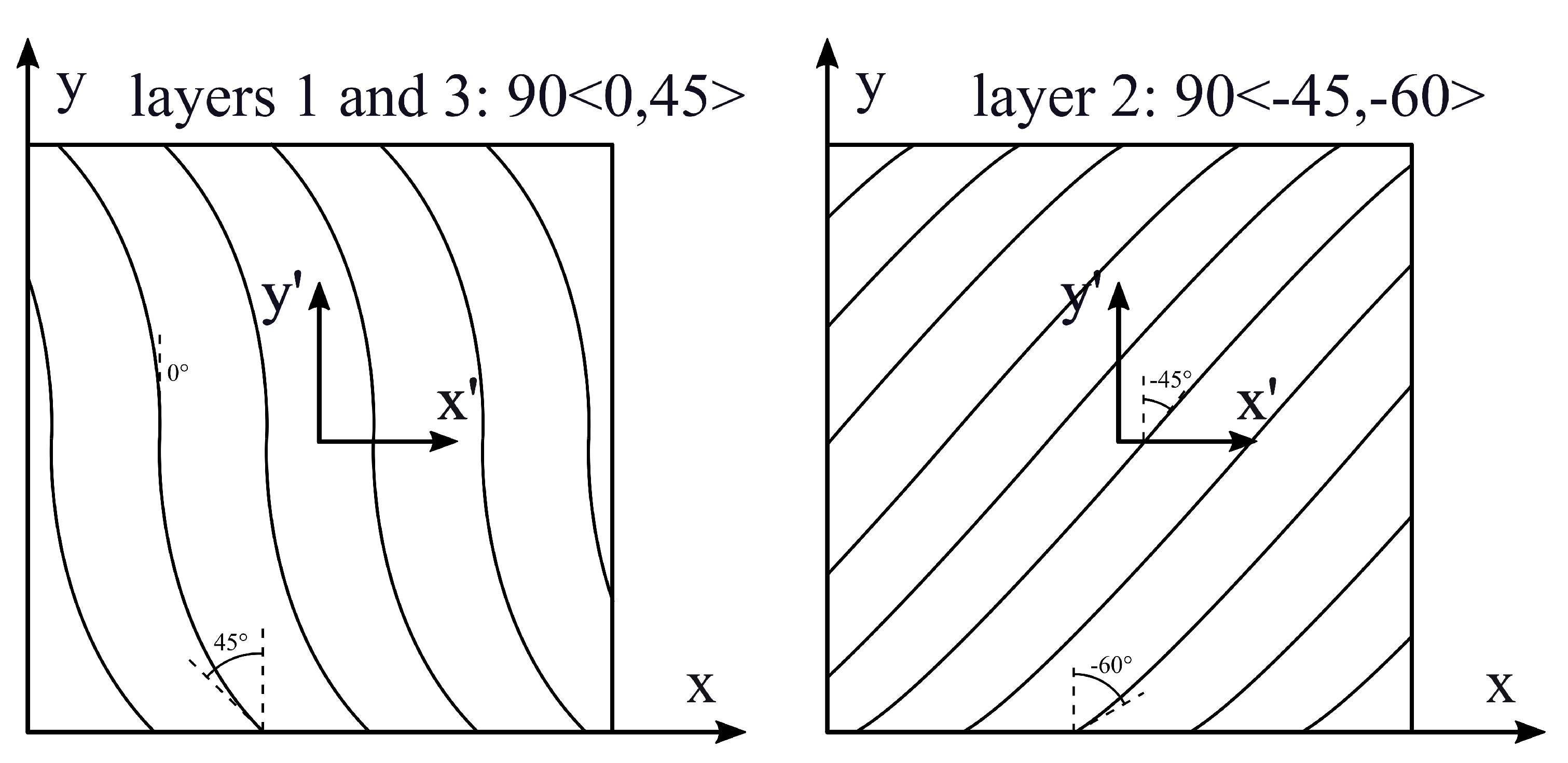
Figure 6.
Stacking sequence, case 3.
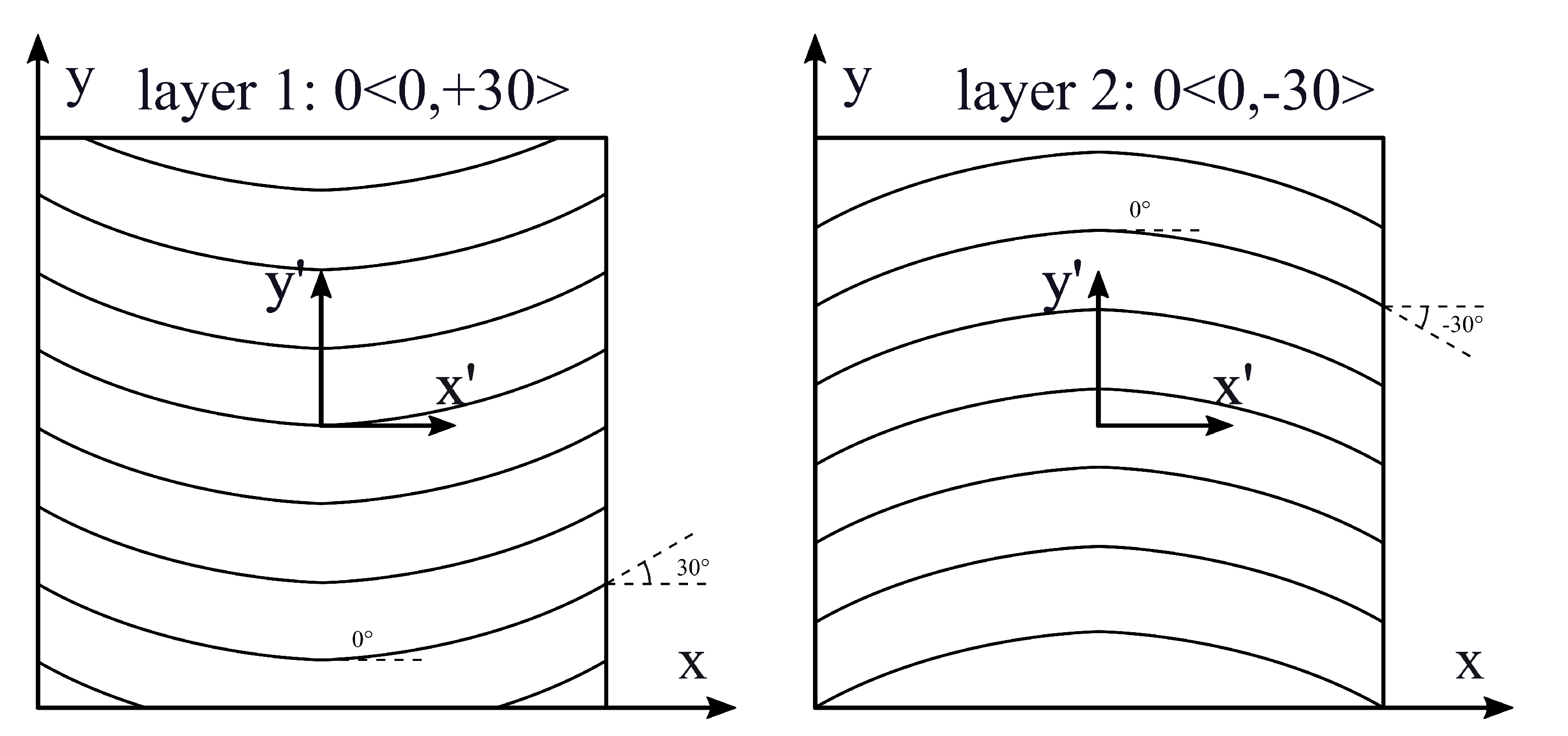
Figure 7.
Mode 1, case 3.
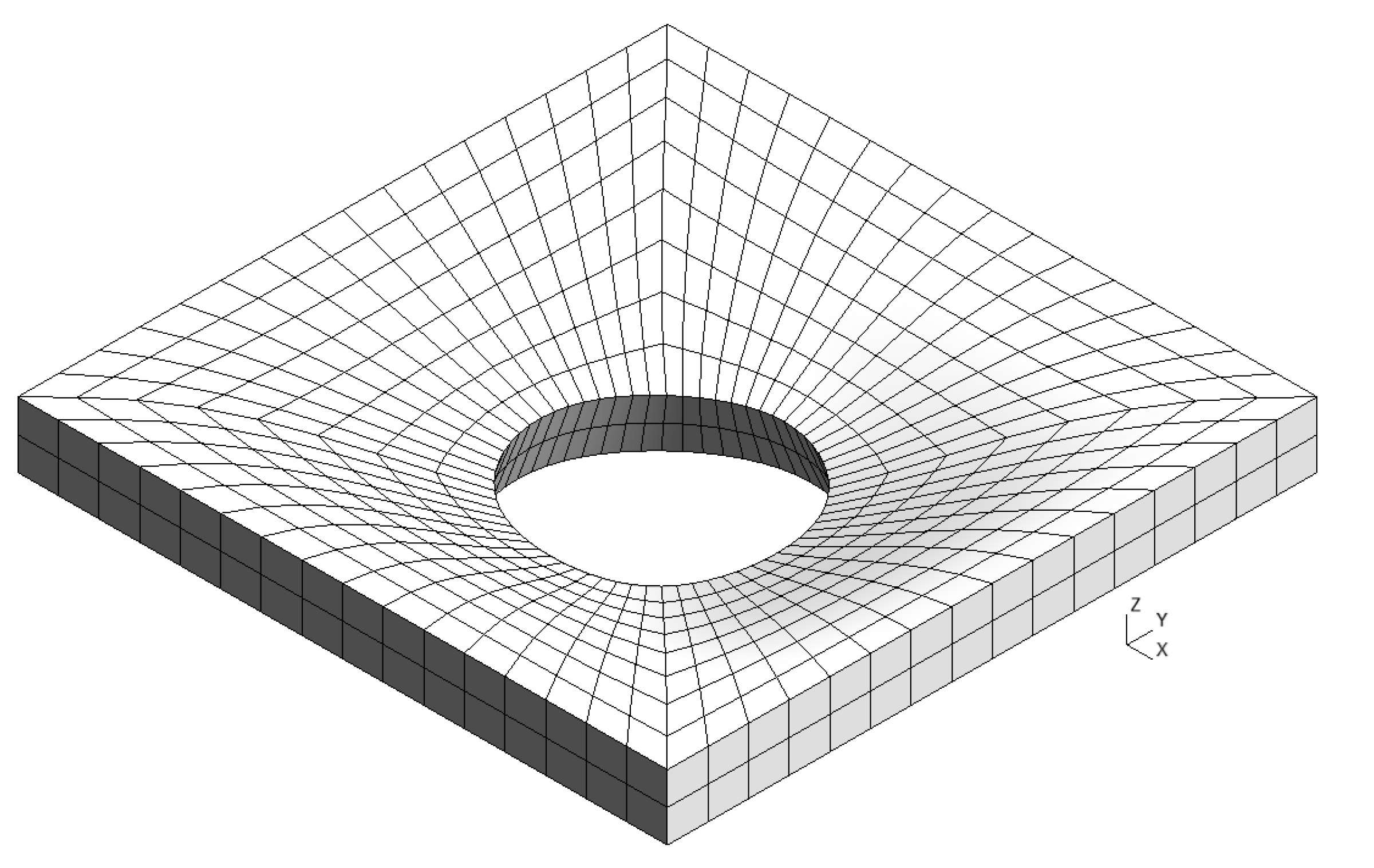
Figure 8.
Mode 2, case 3.
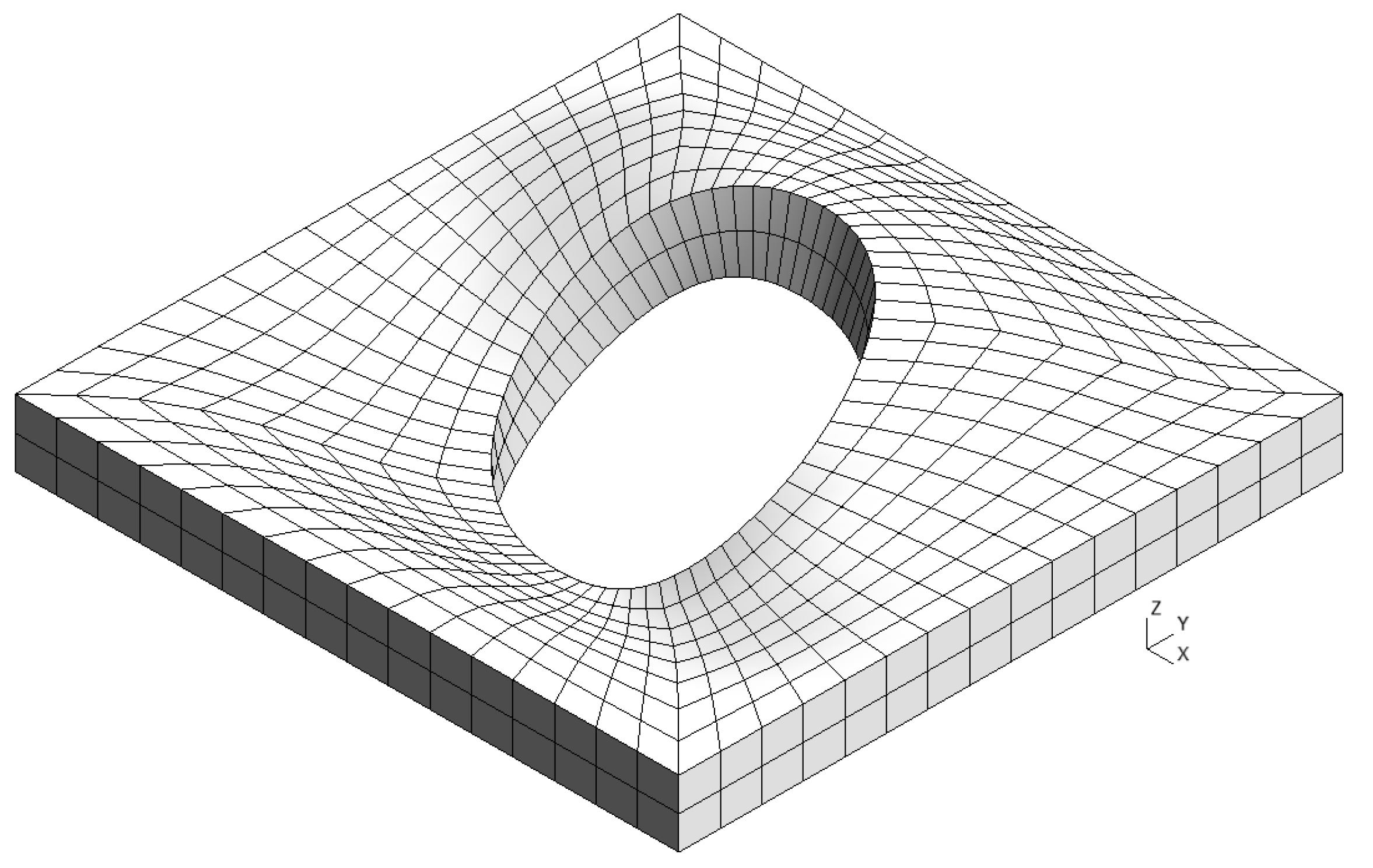
Figure 9.
Mode 3, case 3.
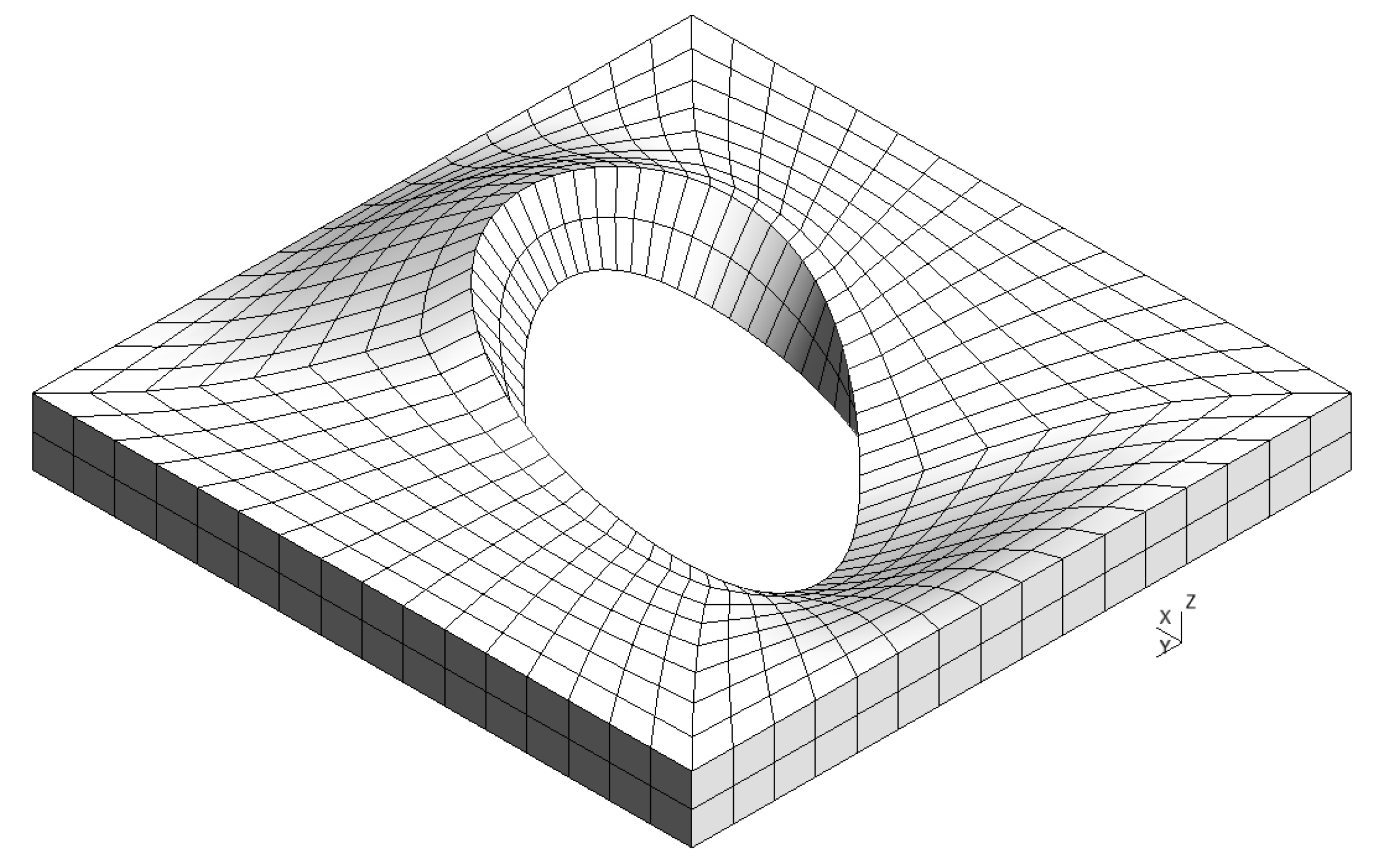
Figure 10.
Mode 4, case 3.
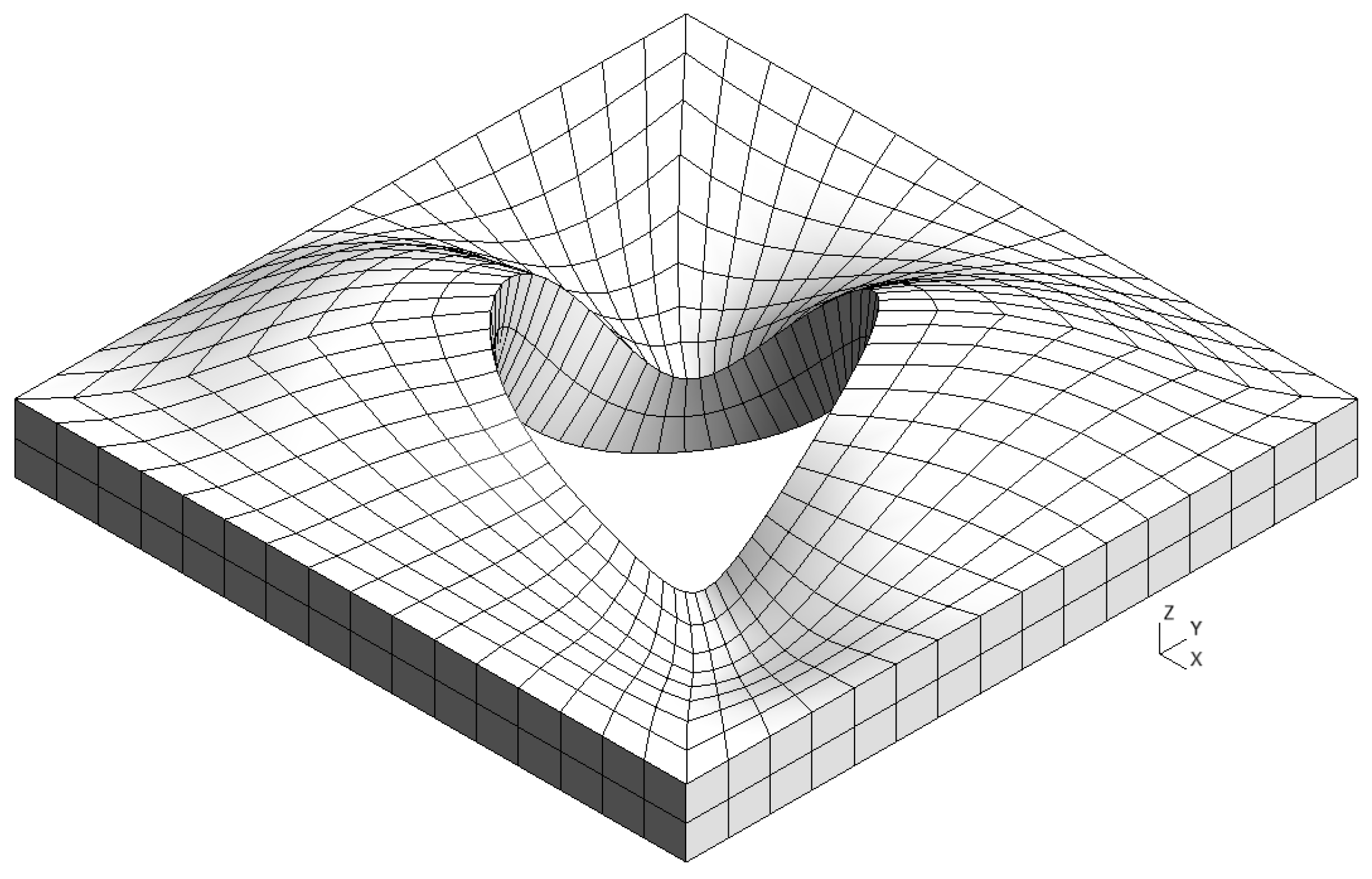
Figure 11.
Mode 5, case 3.
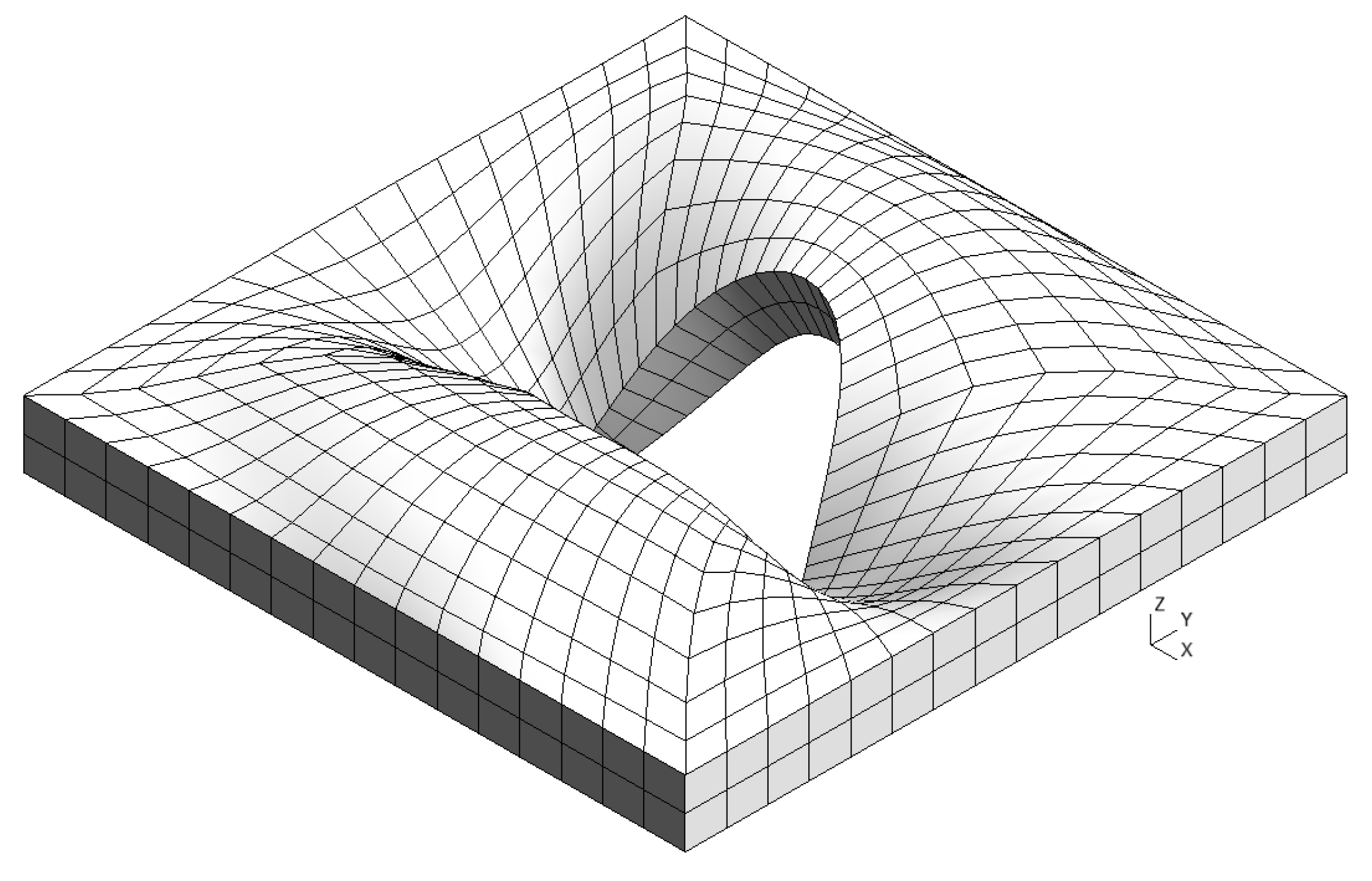

Table 1.
Material properties for case 1.
| Case | [GPa] | [GPa] | [GPa] | |
|---|---|---|---|---|
| 1 | ||||
| 2 | ||||
| 3 |
Table 2.
Degrees of freedom, case 1.
| Model | DOF |
|---|---|
| Abaqus 3D | 997’515 |
| 3LM4 | 34’398 |
| 2LM2 | 13’230 |
| 3LD4 | 17’199 |
| 2LD2 | 6’615 |
| ED4 | 6’615 |
| ED2 | 3’969 |
| FSDT | 2’646 |
| CLT | 2’646 |
Table 3.
Natural frequencies [Hz], , case 1.
| Mode | |||||
|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | |
| Abaqus 3D | 7.397 | 16.354 | 37.158 | 48.025 | 63.349 |
| 3LM4 | 7.399 | 16.334 | 37.164 | 47.988 | 63.310 |
| 2LM2 | 7.398 | 16.333 | 37.162 | 47.986 | 63.309 |
| 3LD4 | 7.400 | 16.362 | 37.179 | 48.053 | 63.378 |
| 2LD2 | 7.400 | 16.362 | 37.179 | 48.054 | 63.379 |
| ED4 | 7.400 | 16.362 | 37.179 | 48.053 | 63.378 |
| ED2 | 7.401 | 16.368 | 37.186 | 48.069 | 63.399 |
| FSDT | 7.398 | 16.363 | 37.171 | 48.054 | 63.388 |
| CLT | 7.403 | 16.414 | 37.213 | 48.175 | 63.537 |
Table 4.
Natural frequencies [Hz], , case 1.
| Mode | |||||
|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | |
| Abaqus 3D | 72.229 | 151.762 | 338.517 | 389.336 | 431.011 |
| 3LM4 | 72.244 | 151.751 | 338.577 | 389.554 | 431.004 |
| 2LM2 | 72.233 | 151.705 | 338.432 | 389.546 | 430.824 |
| 3LD4 | 72.250 | 151.796 | 338.625 | 389.587 | 431.151 |
| 2LD2 | 72.269 | 151.906 | 338.939 | 389.589 | 431.577 |
| ED4 | 72.253 | 151.810 | 338.669 | 389.588 | 431.207 |
| ED2 | 72.466 | 153.069 | 342.179 | 389.592 | 435.990 |
| FSDT | 72.437 | 153.021 | 342.036 | 389.510 | 435.853 |
| CLT | 73.825 | 163.064 | 365.813 | 389.510 | 472.565 |
Table 5.
Natural frequencies [Hz], , case 1.
| Mode | |||||
|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | |
| Abaqus 3D | 136.723 | 264.080 | 389.391 | 556.394 | 704.284 |
| 3LM4 | 136.742 | 264.077 | 389.557 | 556.404 | 704.295 |
| 2LM2 | 136.667 | 263.747 | 389.550 | 555.332 | 703.121 |
| 3LD4 | 136.755 | 264.119 | 389.638 | 556.511 | 704.442 |
| 2LD2 | 136.875 | 264.684 | 389.643 | 558.145 | 706.381 |
| ED4 | 136.774 | 264.224 | 389.640 | 556.855 | 704.832 |
| ED2 | 138.015 | 269.553 | 389.651 | 570.563 | 721.354 |
| FSDT | 137.947 | 269.463 | 389.510 | 570.329 | 721.159 |
| CLT | 146.479 | 319.929 | 389.510 | 696.687 | 895.089 |
Table 6.
Natural frequencies [Hz], , case 2.
| Mode | |||||
|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | |
| Abaqus 3D | 92.18 | 130.68 | 194.96 | 237.56 | 274.60 |
| Ref. [23] | 92.90 | 132.28 | 198.97 | 240.46 | 278.75 |
| LM4 | 92.35 | 131.01 | 195.77 | 238.25 | 275.60 |
| LM2 | 92.34 | 130.99 | 195.74 | 238.23 | 275.58 |
| LD4 | 92.36 | 131.03 | 195.81 | 238.30 | 275.67 |
| LD2 | 92.36 | 131.04 | 195.84 | 238.31 | 275.69 |
| ED4 | 92.37 | 131.06 | 195.88 | 238.32 | 275.72 |
| ED2 | 92.49 | 131.23 | 196.16 | 238.97 | 276.48 |
| FSDT | 92.38 | 131.01 | 195.75 | 238.74 | 276.20 |
| CLT | 93.04 | 131.85 | 197.00 | 242.48 | 280.40 |
Table 7.
Natural frequencies [Hz], , case 2.
| Mode | |||||
|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | |
| Abaqus 3D | 606.67 | 896.70 | 1208.24 | 1313.26 | 1458.25 |
| Ref. [23] | 609.79 | 903.63 | 1216.00 | 1328.41 | 1469.33 |
| LM4 | 606.90 | 897.26 | 1208.80 | 1314.85 | 1459.23 |
| LM2 | 606.33 | 896.52 | 1206.86 | 1313.56 | 1457.30 |
| LD4 | 607.22 | 897.73 | 1209.64 | 1315.80 | 1460.16 |
| LD2 | 608.65 | 901.20 | 1213.06 | 1322.93 | 1465.20 |
| ED4 | 609.84 | 905.18 | 1214.60 | 1331.82 | 1469.17 |
| ED2 | 633.68 | 941.96 | 1272.39 | 1396.16 | 1540.10 |
| FSDT | 632.82 | 940.46 | 1271.42 | 1393.96 | 1538.74 |
| CLT | 921.28 | 1287.71 | 2368.22 | 1885.61 | 2699.22 |
Table 8.
Natural frequencies [Hz], , case 2.
| Mode | |||||
|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | |
| Abaqus 3D | 794.730 | 1201.916 | 1439.956 | 1701.328 | 1810.250 |
| LM4 | 794.760 | 1202.101 | 1440.092 | 1701.788 | 1811.113 |
| LM2 | 792.734 | 1199.331 | 1433.897 | 1696.266 | 1805.942 |
| LD4 | 795.213 | 1202.777 | 1441.080 | 1702.986 | 1812.317 |
| LD2 | 799.063 | 1209.706 | 1448.714 | 1713.982 | 1820.716 |
| ED4 | 802.019 | 1216.744 | 1450.930 | 1723.900 | 1825.405 |
| ED2 | 845.154 | 1294.481 | 1523.246 | 1847.193 | 1930.364 |
| FSDT | 844.048 | 1292.846 | 1522.478 | 1845.945 | 1928.631 |
| CLT | 1790.121 | 2411.198 | - | - | - |
Table 9.
Non-dimensional frequencies , , case 3.
| Mode | |||||
|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | |
| Abaqus 3D | 87.079 | 106.407 | 147.559 | 184.034 | 197.096 |
| LM4 | 87.281 | 106.622 | 147.070 | 184.554 | 197.522 |
| LM2 | 87.259 | 106.593 | 147.045 | 184.500 | 197.489 |
| LD4 | 87.327 | 106.704 | 147.911 | 184.789 | 197.969 |
| LD2 | 87.336 | 106.719 | 147.952 | 184.821 | 198.022 |
| ED4 | 87.331 | 106.708 | 147.921 | 184.798 | 197.984 |
| ED2 | 87.364 | 106.768 | 148.169 | 184.931 | 198.228 |
| FSDT | 87.184 | 106.538 | 148.047 | 184.525 | 198.029 |
| CLT | 87.387 | 106.942 | 150.080 | 185.420 | 199.725 |
Table 10.
Non-dimensional frequencies , , case 3.
| Mode | |||||
|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | |
| Abaqus 3LD4 | 72.645 | 86.745 | 104.279 | 136.366 | 140.278 |
| Ref. [5] | 72.432 | 86.626 | 103.910 | 135.828 | 139.747 |
| LM4 | 72.699 | 86.830 | 104.307 | 136.467 | 140.408 |
| LM2 | 72.573 | 86.700 | 104.051 | 136.137 | 140.143 |
| LD4 | 72.744 | 86.888 | 104.376 | 136.558 | 140.516 |
| LD2 | 73.107 | 87.263 | 105.144 | 137.567 | 141.231 |
| ED4 | 72.868 | 86.990 | 104.630 | 136.851 | 140.725 |
| ED2 | 73.977 | 88.609 | 107.143 | 140.522 | 143.556 |
| FSDT | 74.075 | 88.782 | 107.645 | 141.221 | 143.885 |
| CLT | 84.751 | 104.166 | 143.133 | 190.321 | 174.656 |
Table 11.
Non-dimensional frequencies , , case 3.
| Mode | |||||
|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | |
| Abaqus 3D | 54.333 | 64.456 | 70.572 | 90.875 | 98.086 |
| LM4 | 54.326 | 64.456 | 70.541 | 90.866 | 98.098 |
| LM2 | 54.038 | 64.201 | 70.036 | 90.292 | 97.612 |
| LD4 | 54.388 | 64.514 | 70.619 | 90.956 | 98.191 |
| LD2 | 54.875 | 64.963 | 71.421 | 91.868 | 98.955 |
| ED4 | 54.554 | 64.623 | 70.913 | 91.224 | 98.408 |
| ED2 | 56.062 | 66.756 | 73.181 | 94.442 | 101.535 |
| FSDT | 56.253 | 66.985 | 73.702 | 95.219 | 102.017 |
| CLT | 76.928 | 95.975 | 119.513 | - | - |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



