Submitted:
22 May 2023
Posted:
23 May 2023
You are already at the latest version
Abstract
We firstly present two popular space discretization models of the Nonlinear Schrödinger Equation in dark solitons motion : the Direct-Discrete model and the Ablowitz-Ladik model. Applying the midpoint scheme to the space discretization models, we get two time-space discretization models: the Crank-Nicolson method and the New-Difference method. Secondly, we demonstrate that the solutions of the two space discretization models converge to the solution of the Nonlinear Schrödinger Equation. Also, we prove that the convergence order of the two time-space discretization models are O(h2+τ2) in discrete L2-norm error estimates. Finally, the numerical experiments agree well with the proven theoretical results.
Keywords:
Nonlinear schrödinger equation
; Space discretization models
; Time-space discretization models
; Crank-Nicolson method
; New-Difference method.
1. Introduction
The Nonlinear Schrödinger Equation (NLSE) is one of the most widely used and completely integrable models in nonlinear physics. It plays a crucial role in many physical fields [1,2,3], such as nonlinear optics, solid state physics, quantum mechanics, optical fiber communication, etc. Therefore, the study of such equations has a profound influence on the development of modern science.
Consider the original NLSE with the initial condition :
where a is a real constant, is a complex-valued function; , . NLSE is a class of nonlinear partial differential equations, which produces a special form of solution – soliton solution. When and , NLSE has bright solitons solution[4]; when and , NLSE has dark solitons solution [5,6]. The original NLSE has infinite conserved quantities, including:
where are and , respectively. Utilizing central difference, we can approximate the conserved quantities as follows:
Zakharov and Shabat et al. obtained the exact solution of the original NLSE (1) by using the inverse scattering transformation method [6]. Here, we need to note that the above equation is idealized. But, the actual physical systems has to consider the influence of dissipation and other conditions, making it difficult to get an analytical solution. Consequently, many numerical methods have been found to simulate such equations and study the properties of NLSE according to numerical results[7,8,9,10,11,12,13,14], such as the finite difference, the finite element, or the polynomial approximation.
As is well known, the solitons for the original NLSE maintain their original state after collision with each other. Based on the above special properties, many people have devoted themselves to studying conservative schemes for simulation. Zhu You-lan considered an implicit scheme and gave its convergence [15]. Guo Ben-yu[16] gave the convergence of the Crank-Nicolson method and the prediction-correction method under the error estimations. In [17,18,19,20,21], compact finite difference schemes are proved to be convergent both in the discrete -norm , and in discrete -norm . For the important space discretization models of NLSE, the Direct-Discrete model ( D-D model ) and the Ablowitz-Ladik model ( A-L model ) can be transformed into the Hamiltonian form, respectively. In [22,23], Tang et al. used the symplectic methods to simulate Hamiltonian system and proved that the solution of the D-D model and the A-L model converge to the original NLSE .
The previous proofs of convergence were almostly about bright solitons motion. Given the different parameters and conditions, it is difficult to directly apply the above convergence to dark solitons motion. There is only a little literature about proving the convergence of dark solitons motion . Hence, we give proof of convergence for the space discretization models of the original NLSE in dark solitons motion, which provide theoretical support for numerical simulation. The Crank-Nicolson method is actually obtained by applying the midpoint scheme in time to solve the D-D model. Similarly, we will apply the midpoint scheme to the A-L model , then propose a new difference scheme (called as New-Difference method) of the original NLSE . We will show that the New-Difference method in the dark solitons motion is convergent and of high accuracy by numerical experiment.
This paper is organized as follows. In Section 2, we present the space discretization models and the time-space discretization models for the original NLSE in dark solitons motion, and give some conservation invariants of these models. We confirm the convergence of the space discretization models and the time-space discretization models in Section 3 and Section 4, respectively. In Section 5, we obtain the error order of the space discretization models and the time-space discretization models to test the convergence. In order to further demonstrate the convergence of these models, we get the numerical solutions of these models and check the preservation of the invariants. Finally, we give some conclusions in Section 6.
2. Different Discretization Models
In this section, we present the space discretization models and the time-space discretization models for the original NLSE. The Direct-Discrete model and the Ablowitz-Ladik model discretize the original NLSE in space, while the Crank-Nicolson method and the New-Difference method discretize in time and space simultaneously.
2.1. The space discretization models
Give two classical models of space discretization:
(1) Direct-Discrete model ( D-D model ) :
By setting , D-D model can be directly rewritten as a Hamiltonian system, and has two invariants, that is, the energy and the charge:
2.2. The time-space discretization models
Appling the midpoint scheme to the D-D model and the A-L model in time, we get the following two models: the Crank-Nicolson method and the New-Difference method. Before introducing the two models, we give some definitions: the time step-size and space step-size of these models are respectively, and .
We write the exact solution of the original NLSE as , the numerical solution as , and define:
Let define that:
Then, the two difference schemes for the original NLSE are as follow:
(1) Crank-Nicolson method
(2) New-Difference method
Note that
In numerical experiments section, in order to test the convergence of the numerical solutions of the above models , we will give the preservation of the conserved quantities’approximation given in Section 1.
3. The Convergence of the Space Discretization Models
In this section, we give the proof of convergence for the two space discretization models in dark solitons motion. Suppose that local item ,
Lemma 1.
Suppose that is the solution of the original NLSE, the local item of D-D model is .
Proof of Lemma 1.
According to Taylor’s expansion, , and
So, the local item is of order . □
Theorem 1.
Assume that is the initial condition of D-D model , and all derivative of the initial condition with respect to x satisfies:
(1) and exist, and ,
(2) and
when , the solution of D-D model converges to the solution of the original NLSE .
Proof of Theorem 1.
Suppose that is the solution of the original NLSE, is the solution of D-D model, and .
Subtracting equation (2) from equation (8), we get
Let error term , then
Multiplying equation (11) by ( the complex conjugate of ) summing up for all l, then taking the equations’ imaginary part, we can obtain that
Simplify above equation, then
Scaling equation (12):
(1).
(2)Suppose that , , we get .
Then, we have( are constants)
Multiplying both sides of inequality (13) by space step-size , and defining as , then, we get
We can obtain that
where . So, given a simulation time T, the solution of D-D model converges to the solution of original NLSE when . □
Remark: Instead of using condition to prove convergence in bright solitons motion in [22], we use condition to prove the above conclusion in dark solitons motion.
Theorem 2.
Suppose that is the solution of the original NLSE in dark solitons motion
and , is the solution of A-L model and . One can get that
Therefore, given a simulation time T, the solution of A-L model converges to the solution of the original NLSE .
Proof of Theorem 2.
Through the similar method in [23], we can deduce
Then, the above conclusion can be obtained. □
4. The Convergence of the Time-space Discretization Model
In this section, we give the proof of convergence for the time-space discretization models in dark solitons motion. Let the truncation error be , then:
Proof of Lemma 2.
□
Lemma 3.
The convergence order of the truncation error is .
Proof of Lemma 3.
From the original NLSE, we can obtain:
Substituting them into equation (20), we get that is of order or is of order . □
Lemma 4.
(Gronwall’s inequality [25]) Suppose that is a sequence of nonnegative real numbers satisfying
where and τ are positive constants. We then have the inequality
Theorem 3.
Suppose that is the solution of the original NLSE in dark solitons motion and , is the solution of the Crank-Nicolson method. If the time step τ is sufficiently small, we can get
Then the Crank-Nicolson method is of order in discrete -norm error estimates.
Proof of Theorem 3.
Using the similar method in [16] , We can prove
Then this theorem holds. □
Theorem 4.
Suppose that is the solution of the original NLSE in dark solitons motion and , is the solution of the New-Difference method. If τ is sufficiently small, we can get
so the New-Difference method’s convergence order is in discrete -norm.
Proof of Theorem 4.
Taking the inner product of equation (26) with , and taking the inner product of equation (26)’s conjugate with , then subtracting the obtained two equations, we obtain
where
According to , it follows that:
For the first term in the right side of Equation (27), using the Cauchy-Schwardz inequality , we get
For the second term in the right side of Equation (27), we assume that there’s a constant C, making the exact solution of the original NLSE to meet:
We can get that
As , so , according to Lemma 4, we have:
□
5. Numerical Experiments
In this section, we will present the numerical experiment results to test the proved theorems. Consider the initial condition of the original NLSE for one-dark soliton
where the exact solution is obtained
and .
5.1. Errors and convengence order
In the subsection, we give the convergence order of the space discretization models and the time-space discretization models by Experiment 1 and Experiment 2.
: We use the midpoint scheme to simulate D-D model and A-L model, and choose a fixed minimum time step-size in order to reduce error caused by difference in time as much as possible. Then, comparing the solution of the space discretization models with the exact solution (34) of the original NLSE, we can obtain error and the corresponding convergence order at time with different space step-size . Finally, we plot with respect to in Figure 1. Table 1 and Table 2 and Figure 1 indicate that the order of is . So, we come to the conclution that the convergence of the D-D model and the A-L model is in the defined norm , which fits the results of Theorem 1 and Theorem 2 very well.
: In order to determine the convergence order of Crank-Nicolson method and New-Difference method , we choose the space step-size and the time step-size . Then, we can calculate the truncation error, where . Due to ( K is fixed ), we choose to plot with respect to in Figure 2. Tabel Table 3Table 4 and Figure 2 indicate that the convergence order of the Crank-Nicolson method and the New-Difference method is in -norm, which is also in good agreement with the results of Theorem Tables 3 and 4.
5.2. Numerical simulation of dark solitons motion
: We take the spatial interval and temporal interval from to with two different pairs of integration parameters:
The numerical solutions for the Crank-Nicolson method and the New-Difference method are drawn in Figure 3 and Figure 4. From the figure, we can see that the two methods simulate the motion of the one-dark soliton very well .
5.3. Preservation of invariants
In order to further demonstrate convergence, we check the preservation of the invariants of these models. Here, we take , , and set for any invariant A.
: For D-D model, we give the preservation of the invariants and . For A-L model, the invariants and have both the real part and the imaginary part, so we persent the real and imaginary part of invariants and ( , respectively. Figure 6 shows that the space discretization models have a good simulation effect from the trend of the invariants’error , which further confirms the convergence of these models.
: We use the conserved quantities’ approximation and ( ) of the original NLSE to test the convergence of the time-space discretization models. As the imaginary part of and the real part of are zero, we only present the evolutions of the rest and . Figure 5 shows that the time-space discretization models can maintain the conserved quantities’approximation and well, which further illustrates the convergence of these models .
6. Conclusions
In dark solitons motion , we have proved that the solutions of the D-D model and the A-L model converge to the solution of the original NLSE when , and their convergence order are in the defined norm. Our results of numerical experiments are in good agreement with the ones of theory. We use the midpoint scheme to solve the D-D model and the A-L model , then get the Crank-Nicolson method and the New-Different method. Through theoretical proof, we show that the two schemes are of order in discrete -norm error estimates. The corresponding numerical experiments also fit the proven theories well.
Author Contributions
Conceptualization, Y.L. and Q.L.; methodology, Y.L. and Q.L.; software, Y.L., Q.L. and Q.F.; validation, Y.L., Q.L. and Q.F.; investigation, Y.L.; writing—original draft preparation, Y.L.; writing—review and editing, Q.F.; project administration, Q.F.; funding acquisition, Q.F. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported by the Fundamental Research Funds for the Central Universities (Nos. 2018ZY14, 2019ZY20 and 2015ZCQ-LY-01), Beijing Higher Education Young Elite Teacher Project (YETP0769) and the National Natural Science Foundation of China (Grant Nos. 61571002, 61179034 and 61370193).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Ablowitz, M.J.; Segur, H. Solitons and the inverse scattering transform; SIAM, 1981. [Crossref].
- Dodd, R.K.; Eilbeck, J.C.; Gibbon, J.D.; Morris, H.C. Solitons and nonlinear wave equations. Academic Press,New York 1982. [Crossref].
- Hasegawa, A. Optical solitons in fibers. In Optical solitons in fibers; Springer, 1989; pp. 1–74. [Crossref].
- Konotop, V.V.; et al. Nonlinear random waves; World Scientific, Singapore, 1994.
- Konotop, V.; Vekslerchik, V. Randomly modulated dark soliton. Journal of Physics A: Mathematical and General 1991, 24, 767. [Google Scholar]
- Zakharov, V.E.; Shabat, A.B. Interaction between solitons in a stable medium. Sov. Phys. JETP 1973, 37, 823–828. [Google Scholar]
- Sanz-Serna, J. Methods for the numerical solution of the nonlinear Schrödinger equation. mathematics of computation 1984, 43, 21–27. [Google Scholar] [CrossRef]
- Zhang, L. A High Accurate and Conservative Finite Difference Scheme for Nonlinear Schrodinger Equation. Acta Math. Appl. Sin. 2005. [Crossref].
- Fei, Z.; Pérez-García, V.M.; Vázquez, L. Numerical simulation of nonlinear Schrödinger systems: a new conservative scheme. Applied Mathematics and Computation 1995, 71, 165–177. [Google Scholar]
- Xu, Y.; Shu, C.W. Local discontinuous Galerkin methods for nonlinear Schrödinger equations. Journal of Computational Physics 2005, 205, 72–97. [Google Scholar] [CrossRef]
- Bratsos, A.; Ehrhardt, M.; Famelis, I.T. A discrete Adomian decomposition method for discrete nonlinear Schrödinger equations. Applied mathematics and computation 2008, 197, 190–205. [Google Scholar] [CrossRef]
- He, J.H. Homotopy perturbation method: a new nonlinear analytical technique. Applied Mathematics and computation 2003, 135, 73–79. [Google Scholar] [CrossRef]
- Akrivis, G.D. Finite difference discretization of the cubic Schrödinger equation. IMA Journal of Numerical Analysis 1993, 13, 115–124. [Google Scholar]
- Borhanifar, A.; Abazari, R. Numerical study of nonlinear Schrödinger and coupled Schrödinger equations by differential transformation method. Optics Communications 2010, 283, 2026–2031. [Google Scholar] [CrossRef]
- Zhu, Y.L. Implicit difference schemes for the generalized non-linear Schrödinger system. Journal of Computational Mathematics 1983, pp. 116–129. [Crossref].
- Guo, B.y. The convergence of numerical method for nonlinear Schrodinger equation. Journal of Computational Mathematics 1986, 4, 121–130. [Google Scholar]
- Zhang, L.; Chang, Q. A conservative numerical scheme for a class of nonlinear Schrödinger equation with wave operator. Applied mathematics and computation 2003, 145, 603–612. [Google Scholar] [CrossRef]
- Xie, S.S.; Li, G.X.; Yi, S. Compact finite difference schemes with high accuracy for one-dimensional nonlinear Schrödinger equation. Computer Methods in Applied Mechanics and Engineering 2009, 198, 1052–1060. [Google Scholar] [CrossRef]
- TingChun WANG, B.G. Unconditional convergence of two conservative compact difference schemes for non-linear Schrödinger equation in one dimension. SCIENTIA SINICA Mathematica 2011, 41, 207–233. [Google Scholar]
- Li, X.; Zhang, L.; Wang, S. A compact finite difference scheme for the nonlinear Schrödinger equation with wave operator. Applied Mathematics and Computation 2012, 219, 3187–3197. [Google Scholar] [CrossRef]
- Li, X.; Zhang, L.; Zhang, T. A new numerical scheme for the nonlinear Schrödinger equation with wave operator. Journal of Applied Mathematics and Computing 2017, 54, 109–125. [Google Scholar] [CrossRef]
- Tang, Y.F.; Vázquez, L.; Zhang, F.; Pérez-García, V. Symplectic methods for the nonlinear Schrödinger equation. Comput. Math. with Appl. 1996, 32, 73–83. [Google Scholar]
- Tang, Y.F.; Pérez-García, V.M.; Vázquez, L. Symplectic methods for the Ablowitz-Ladik model. Applied mathematics and computation 1997, 82, 17–38. [Google Scholar]
- Tang, Y.F.; Cao, J.; Liu, X.; Sun, Y. Symplectic methods for the Ablowitz–Ladik discrete nonlinear Schrödinger equation. Journal of Physics A: Mathematical and Theoretical 2007, 40, 24–25. [Google Scholar]
- Ben-Yu, G.; Pascual, P.J.; Rodriguez, M.J.; Vázquez, L. Numerical solution of the sine-Gordon equation. Applied Mathematics and Computation 1986, 18, 1–14. [Google Scholar] [CrossRef]
Figure 1.
Errors and convengence order at time .
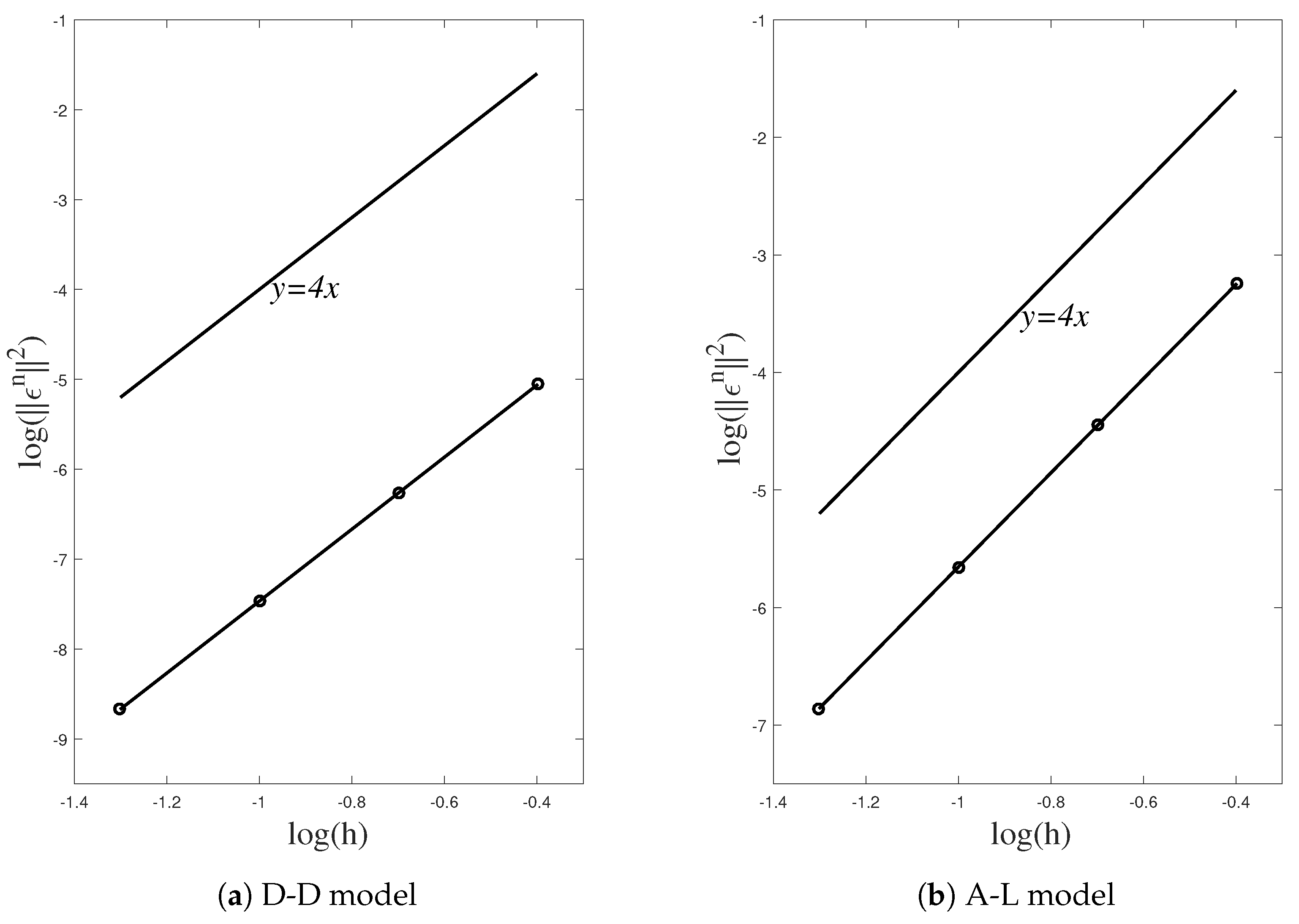
Figure 2.
Errors and convengence order at time .
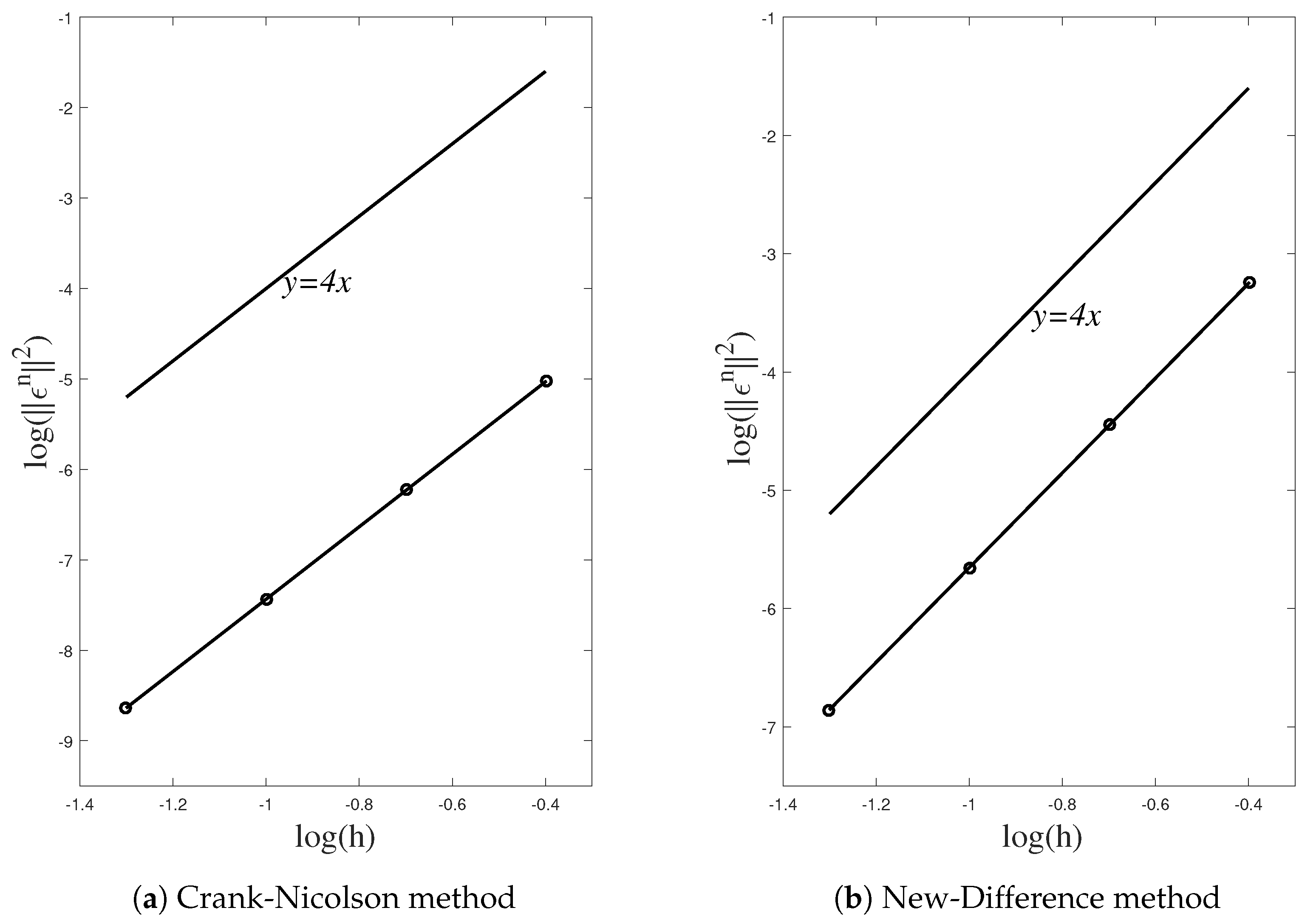
Figure 3.
The numerical solutions for the Crank-Nicolson method.
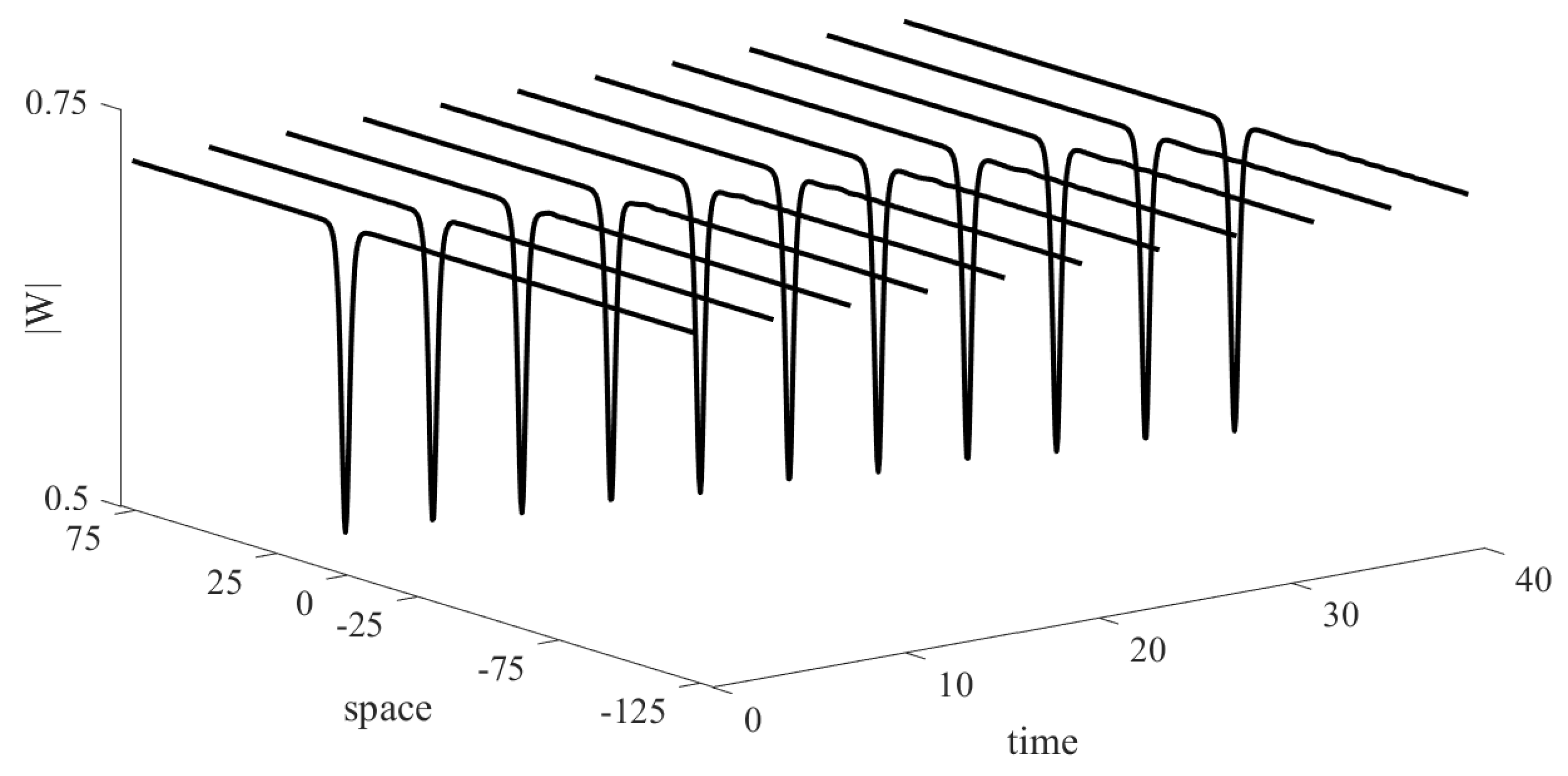
Figure 4.
The numerical solutions for the New-Difference method.
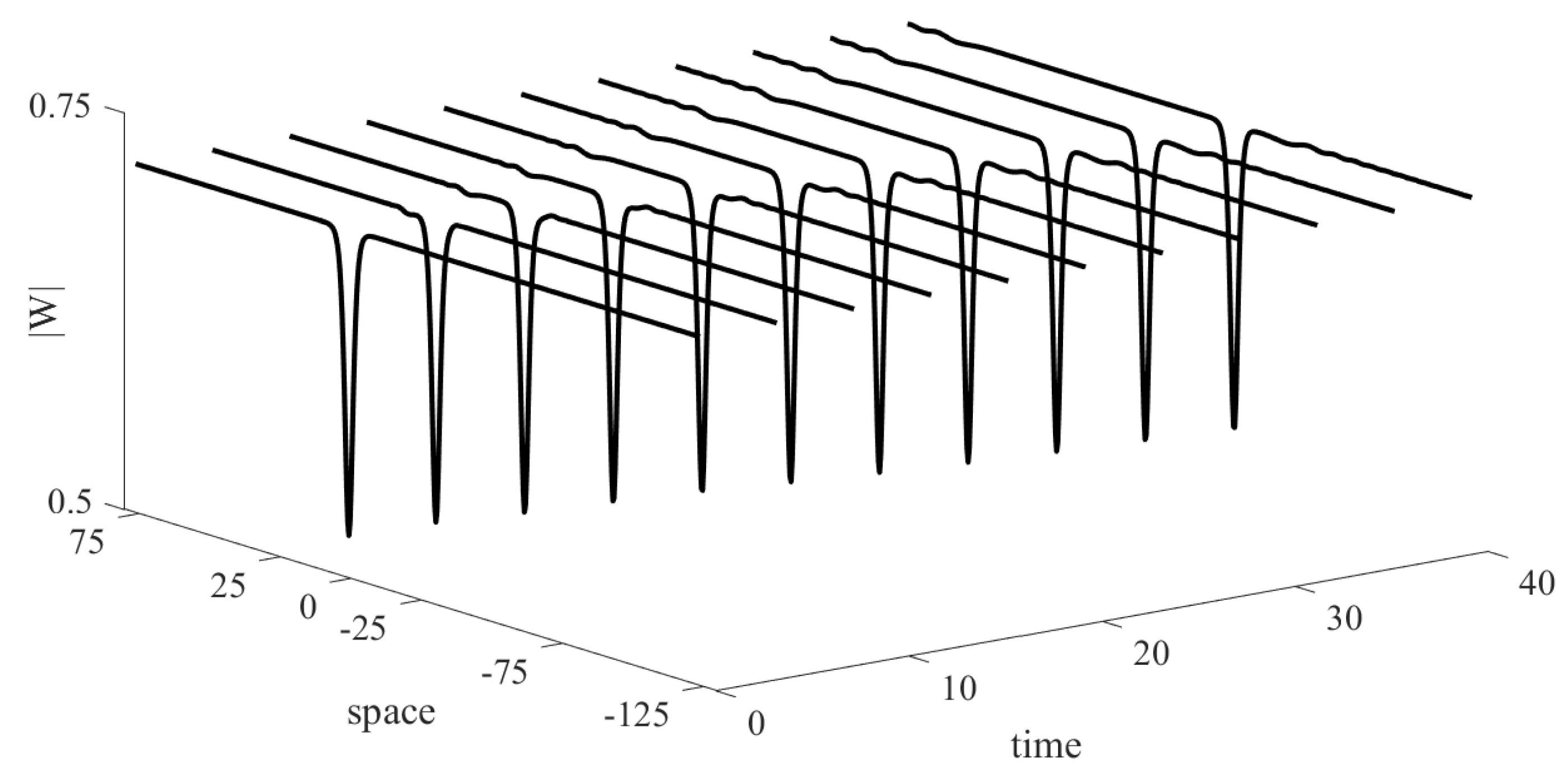
Figure 5.
Evolution of invariants by the time-space discretization models.
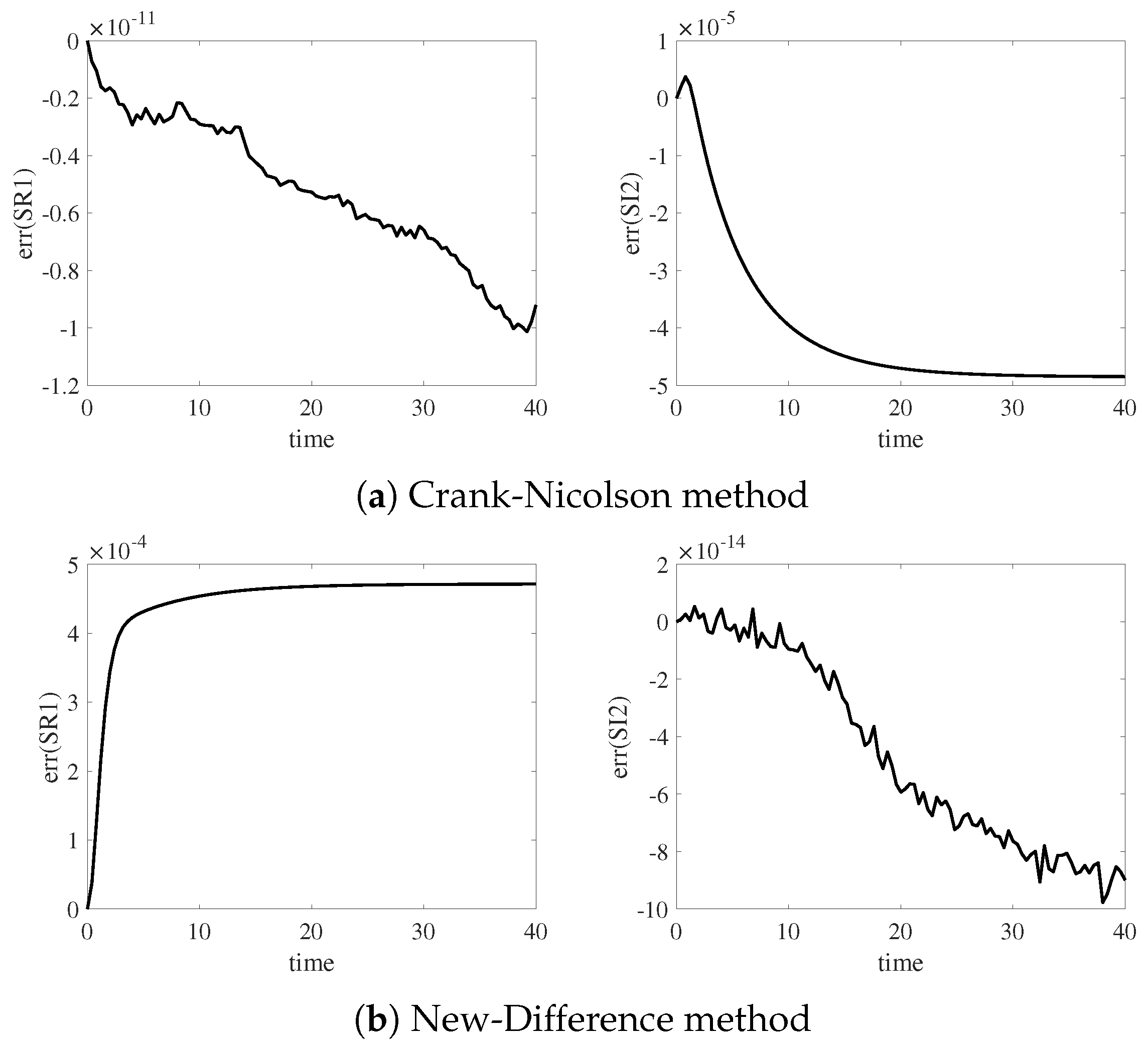
Figure 6.
Evolution of invariants by the space discretization models.
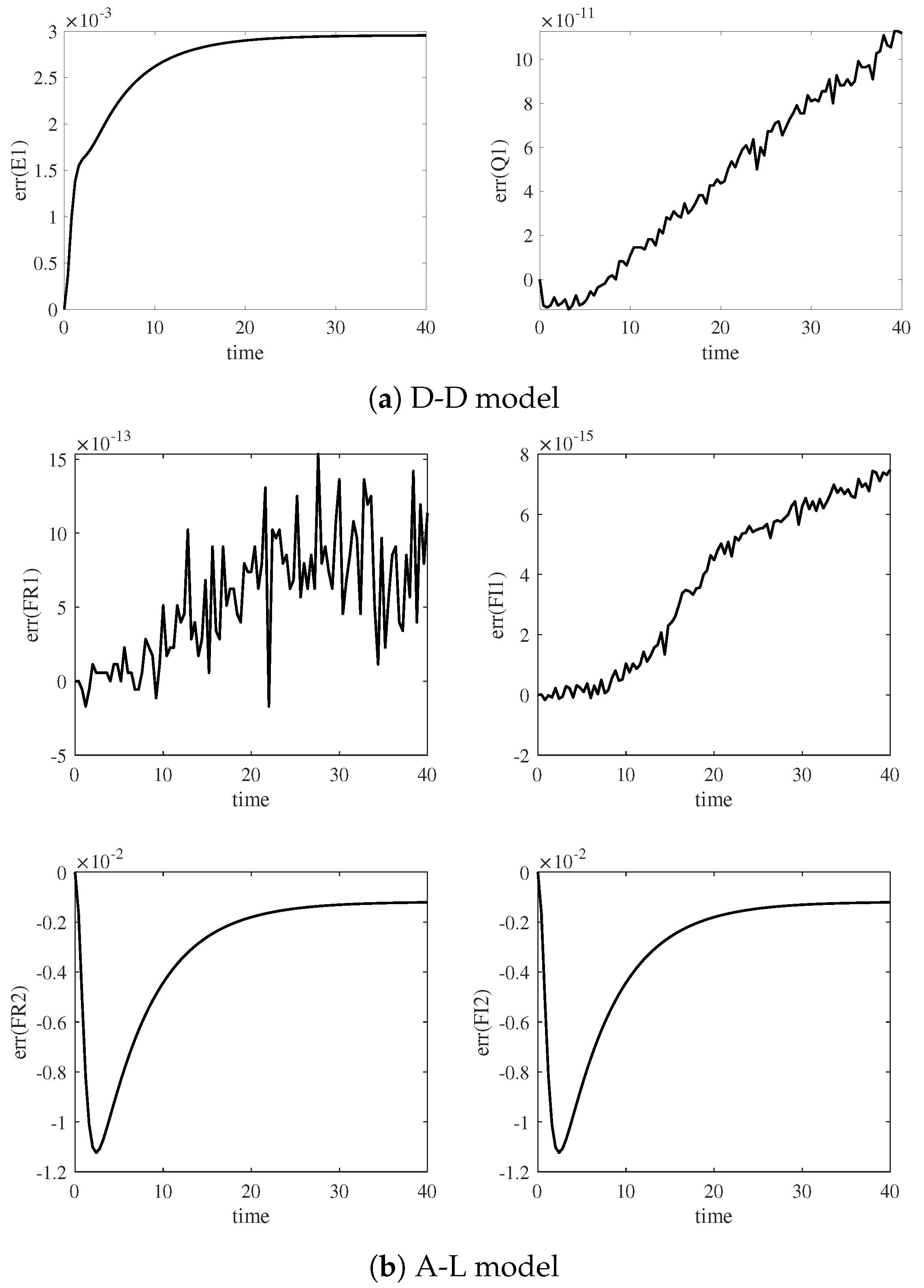

Table 1.
Errors and convengence order of D-D model at time .
| h | Order | ||
| 0.4 | 0.00005 | 8.804684 | |
| 0.2 | 0.00005 | 0.546416 | 4.01416 |
| 0.1 | 0.00005 | 0.034090 | 4.00359 |
| 0.05 | 0.00005 | 0.002130 | 4.00086 |
Table 2.
Errors and convengence order of A-L model at time .
| h | Order | ||
| 0.4 | 0.00005 | 5.709740 | |
| 0.2 | 0.00005 | 0.354637 | 4.01251 |
| 0.1 | 0.00005 | 0.022128 | 4.00330 |
| 0.05 | 0.00005 | 0.001382 | 4.00083 |
Table 3.
Errors and convengence order of Crank-Nicolson method at time .
| h | Order | ||
| 0.4 | 0.008 | 9.490216 | |
| 0.2 | 0.004 | 0.589315 | 4.01295 |
| 0.1 | 0.002 | 0.036771 | 4.00331 |
| 0.05 | 0.001 | 0.002297 | 4.00083 |
Table 4.
Errors and convengence order of New-Difference method at time .
| h | Order | ||
| 0.4 | 0.008 | 5.730127 | |
| 0.2 | 0.004 | 0.355952 | 4.01223 |
| 0.1 | 0.002 | 0.022211 | 4.00323 |
| 0.05 | 0.001 | 0.001388 | 4.00082 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



