
Submitted:
29 May 2023
Posted:
30 May 2023
You are already at the latest version
Abstract
Target detection and segmentation in synthetic aperture radar (SAR) images are vital steps for many remote sensing applications. In the era of data-driven deep learning, this task is extremely challenging due to the limited labeled data. Few-shot Learning has the ability to learn quickly from few samples with supervised information. Inspired by this, a few-shot learning framework named MSG-FN is proposed to solve the segmentation of ship targets in heterologous SAR images with few annotated samples. The proposed MSG-FN adopts a dual-branch network consisting of a support branch and a query branch. The support branch is used to extract features with an encoder, and the query branch uses a U-shaped encoder-decoder structure to segment the target in the query image. The encoder of each branch is composed of well-designed residual blocks combined with filter response normalization to capture robust and domain-independent features. A multi-scale similarity guidance module is proposed to improve the scale adaptability of detection by applying hand-on-hand guidance of support features to query features of various scales. In addition, a SAR dataset named SARShip-4i is built to evaluate the proposed MSG-FN and the experimental results show that the proposed method achieves superior segmentation results compared with the state-of-the-arts.
Keywords:
SAR image
; ship segmentation
; few-shot learning
; multi-scale similarity guidance
1. Introduction
Synthetic aperture radar (SAR) is an imaging radar with high range and azimuth resolution, which is widely used in the field of military and civilian due to its all-day and all-weather imaging capabilities. Target detection and segmentation are important parts of SAR image understanding and analysis. As the main transport carrier and effective combat weapon, automatic ship detection and segmentation provide important support for protecting maritime inviolable rights and maintaining maritime military security. Therefore, it is of great significance to carry out research on ship detection and segmentation in SAR images.
Most of the current ship detection methods [1,2,3] are based on the conventional object detection framework to achieve ship detection. These methods provide the position information of the bounding box covering the target, but they do not provide detailed contour information of the target. Target segmentation refers to segment the target of interest in images at the pixel level, which simultaneously provides position information and contour information of the target. Hence, ship segmentation is treated as a more accurate and comprehensive means to achieve ship detection.
The segmentation algorithms based on active contour are popular in the field of image segmentation, including the improved K-means active contour model [4,5], the entropy-based active contour segmentation model [6], and the Chan-Vese model [7]. The Hidden Markov model is a commonly used method for image segmentation, which is a two-level structure model consisted of an unobservable hidden layer and an observable upper layer. Clustering analysis technology is also widely used to solve this issue, such as multi-center clustering algorithm [8], fast fuzzy segmentation [9], adaptive fuzzy C-means algorithm [10], and the bias correction fuzzy c-means algorithm [11]. As for SAR image segmentation, the most representative methods are the image segmentation algorithms [12,13,14] base on the constant false alarm rate (CFAR) detector [15], in which a threshold is determined based on the statistical characteristics of each image, and the image is segmented by comparing the gray level value of each pixel against the threshold value. CFAR-based methods consider pixel contrast information, while ignoring the structural features of the target, which leads to speckle noise in the segmentation results, incorrect target localization, and a large number of false alarms.
With the rapid development of deep learning technology, the convolutional neural network (CNN) has achieved excellent performance in the field of image processing [16,17,18,19], such as image classification [16], object detection [17], and object segmentation [18,19]. Many mature deep learning methods have also been put forward in the fields of SAR image processing. For example, Henry et. al [20] presented fully convolutional neural network for road segmentation in SAR images and enhanced the sensitivity toward thin objects by adding the spatial tolerance rules. Bianchi et. al [21] explored the capability of deep learning models in segmenting the snow avalanches in SAR images at a pixel granularity for the first time. Deep learning-based methods effectively improve the performance in data-intensive tasks, where a large amount of data is required to train the deep models. However, the performance of the deep learning methods is limited or even ineffective when the available training dataset is relatively small. Besides, the deep learning-based methods have insufficient generalization ability in the task of SAR image processing due to the large imaging area and various imaging characteristics of the SAR images. Specifically, most of these methods have superior performance in the source domain data, but their performance is degraded in the target domain. Therefore, how to solve the problem of SAR ship segmentation on the cross-domain small dataset is still an extremely challenging task.
Transfer learning is a commonly used strategy in the cross-domain tasks by transferring knowledge learned from a source domain with sufficient training data to a target domain lacking training data. However, a certain scale of target domain data is still required to achieve better results. Such requirement is still a burden in SAR image processing because it is expensive and time-consuming to collect SAR images and provide the label, especially in the task of SAR segmentation where the pixel-level ground truth is needed. Few-Shot Learning (FSL) has the ability to learn and generalize from a small number (one or several) of samples, which provides a feasible solution to the above problem. As a typical few-shot learning framework, Meta-learning is borrowed from the way humans learn a new task. Human rarely learn from scratch but learn based on the experience gained from the learning process of the related tasks when they learn a new skill. Meta-learning, also known as learn to learn, is proposed based on this learning mechanism of the human brain. The purpose of Meta-learning is to learn from previous learning tasks in a systematic and data-driven way to obtain a learning method or meta-knowledge, so as to accelerate the learning process of new tasks [22]. Therefore, meta-learning framework is applied to solve the problem of SAR ship segmentation on the small cross-domain dataset.
The distribution of ship data in different regions is quite different due to various imaging modes, imaging resolutions, and imaging satellites. Ship segmentation in SAR images in different regions is considered as tasks originating from different domains. In this paper, a multi-scale similarity guidance few-shot network titled MSG-FN is proposed for ship segmentation in heterogeneous SAR images with few labeled samples in the target domain. The proposed MSG-FN adopts a dual-branch network structure including a support branch and a query branch. The support branch is used to extract the features of a specific domain target with a single encoder structure, while the query branch utilizes a U-shaped encoder-decoder structure to segment the target in the query image. These two branches share the same parameters in the encoder part, and the encoder is composed of well-designed residual blocks combined with filter response normalization (FRN). A similarity guidance module is designed to guide the segmentation process of the query branch by incorporating the pixel-wise similarities between the features of support objects and query images. Four similarity guidance modules are deployed between the support branch and the query branch at various scales to enhance the detection adaptability of targets with different scales. In addition, a challenging ship target segmentation dataset named SARShip-4i is built by ourselves to evaluate the proposed ship segmentation network, which includes both offshore and inshore ships.
The key contribution of this paper are as follows.
- A multi-scale similarity guidance few-shot learning framework with a dual-branch structure is proposed to implement ship segmentation in heterogeneous SAR images with few annotated samples;
- A residual block combined with FRN is designed to improve the generalization capability in the target domain, which forms the encoder of the support and query branches for domain-independent features extraction;
- A similarity guidance module is proposed and inserted between two branches at various scales to perform hand-on-hand segmentation guidance of the query branch by pixel-wise similarity measurement;
- A ship segmentation dataset named SARShip-4i is built, and the experiment results on this dataset demonstrate the proposed MSG-FN has the superior ship segmentation performance.
2. Related Work
2.1. Semantic Segmentation
Semantic segmentation is a classic problem in the field of computer vision, which aims at the pixel-level classification of images, providing a foundation for subsequent tasks of image scene understanding and environment perception. The deep learning method firstly applied to image semantic segmentation is patch classification [23], in which the image is cut into blocks and fed into the depth model, and then the pixels are classified. Subsequently, the Fully Convolutional Network (FCN) [24] was developed, which removes the original fully connected layer and converts the network to a fully convolutional model. The speed of FCN is much faster than that of the Patch classification method and the FCN method does not require the fixed size of the input image. However, the linear interpolation decoding method in the FCN leads to the loss of structure information and the obtained boundary is relatively coarse despite the fact that some skipping connections are used. SegNet [25] is proposed to solve this problem by introducing more skipping connections and replicating the maximum pooled index. Another issue of the FCN model for semantic segmentation is the unbalance between the scale of the receptive field and the resolution of the feature map. The pooling layer enlarges the receptive field, but the resolution is reduced due to the down-sampling operation of the pooling layer, thus weakening the position information that semantic segmentation needs to preserve.
To keep the trade-off between the scale of the receptive field and the resolution of the feature map, the dilated convolutional structure and the encoder-decoder structure were proposed. Fisher et al. [26] designed a dilated convolutional network to realize semantic segmentation, which increases the respective field without decreasing the spatial dimension. U-Net [27] is a typical encoder-decoder structure, the encoder gradually reduces the spatial dimension of the pooling layer, and the decoder recovers the details and spatial dimension of the target step by step. Besides, there is a skip connection between the encoder and the decoder so that shallow features can assist in recovering the details of the target. Furthermore, RefineNet [28] was proposed based on U-Net, which exploited all the information available along the down-sampling process and used long-range residual connections to enable high-resolution prediction. In this way, the fine-grained features in the early convolution are used to refine the high-level semantic features captured by the deeper layers.
Accurate segmentation of targets with different scales is the focal and difficult issue of semantic segmentation. In order to achieve this goal, semantic segmentation methods need to integrate the spatial features of different scales to achieve the accurate description of multi-scale objects. A simple idea is to use the image pyramid [29], in which the input image is scaled into different sizes, and then the final segmentation result is obtained in an integrated way. In addition to the image pyramid, most of the current methods focus on how to make effective use of low-level features and high-level features. It is believed that the low-level features include rich location information, which is particularly important for accurate positioning, while the high-level features contain abundant semantic information, which is of great benefit to fine classification. In [30], a multi-scale context-aggregated module called the pyramid pooling module (PPM) was introduced, which uses different large-scale pooling kernels to capture global context information. On the basis of this work, Chen et al. [31] proposed an atrous spatial pyramid pooling (ASPP) module via replacing the pooling and convolution in PPM with the atrous convolution. Subsequently, the DenseASPP [32] was proposed to generate features with more various scales in a larger range by combining the advantages of parallel and cascade expansion convolution.
The above methods work well on large-scale natural images, but the performance of these algorithms decreases when the amount of training data is small. As for SAR images, the number of SAR images collected in a scene is limited due to the special imaging mode of the SAR images. Besides, the amount of labeled SAR images that can be used to train the segmentation model is small because that the pixel-level labeling of SAR images is time-consuming and laborious. Therefore, how to use the knowledge learned in other scenes to make predictions with few training data is an urgent problem worthy of consideration.
2.2. Few-shot Learning
Few-shot learning is a learning paradigm proposed to solve the problem of small-scale training data, which refers to learning from a limited number of instance samples with supervised information. The proposal of few-shot learning is drawn lessons from the rapid learning mechanism of the human brain, that is, human beings quickly learn new tasks by using what they have learned in the past. The amount of training data determines the upper limit of the algorithm's performance. If a small-scale dataset is used to train a complex deep neural network in the traditional way, the over-fitting problem is inevitable. Due to the little demand for the well-annotated training data, FSL has attracted wide attention and has been adopted in various image processing tasks, such as, image classification [33,34,35], semantic segmentation [36,37,38], and object detection [39,40].
FSL aims at obtaining good learning performance given limited training samples. Specifically, given a learning task and a dataset which is consists of a training set and a test set. The number of training samples in the training set is relatively small, usually less than or equal to 5. The training set is also called support set, and the test set is also called query set. Suppose these is a theoretical mapping function satisfied between the input and the corresponding label. The purpose of few-shot learning is to find an approximate optimal mapping function in the mapping space
by learning from other similar tasks, so as to achieve accurate prediction on the test set. Few-shot learning is mainly reflected in the numbers of the samples in the support set, which is the number of well-annotated samples required when learning a new task.
Taking the most classic task of image classification as an example. The training set contains training data belonging to different categories. is the number of categories contained in the training set, is the number of images corresponding to each category, and the number of the training samples is. This kind of few-shot learning is called N-way K-shot learning. In particular, it is called one-shot learning when.
2.3. Few-shot Semantic Segmentation
Currently, there are some researchers try to use few-shot learning to achieve image semantic segmentation. The most widely adopted technical route is to use the guidance information in the support set, and guide the segmentation of the target in the query set by cleverly designing the network structure. The generally adopted network is a double-branch structure, as shown in Figure 1. The support image and its corresponding label are fed into the support branch to provide guidance for the query branch, and then the prediction result of the query image is obtained. From the perspective of the way to achieve guidance, the existing few-shot segmentation methods can be divided into three types [36], namely, matching-based methods [37,38], prototype-based methods [41], and optimization-based methods [42].
The typical matching-based method is SG-One [37], in which a similarity-guided one-shot semantic segmentation network was proposed. SG-One uses the dense pairwise feature to measure the similarity and a specific decoding network to generate segmentation results. On this basis, CANet [38] adds a multi-level feature comparison module to the dual-branch network structure, and improves the segmentation performance through multiple iterations of optimization.
The prototype-based methods extract the global context information to represent each semantic category, and use the overall prototype of the semantic category to match the query image at the pixel level. PANet [41] learns class-specific prototype representations by introducing prototype alignment regularization between the support branch and the query branch. Both the prototype-based methods and the matching-based methods use a metric-based meta-learning framework to compare the similarity between support image and query image.
The optimization-based methods regard the few-shot semantic segmentation problem as a pixel classification problem. There are few related works. Among them, MetaSegNet [42] uses global and local feature extraction branches to extract meta-knowledge and integrates linear classifiers into the network to deal with pixel classification problems. MetaSegNet mainly focuses on N-way K-shot (N>1) problem to realize the multi-objective segmentation problem.
The above methods mainly focus on the few-shot semantic segmentation of natural images. In the field of SAR image processing, it is not feasible to directly use the few-shot segmentation method in natural image scenes because of the large distribution difference of SAR images under different imaging conditions. Therefore, we remodel the few-shot segmentation method of SAR images and propose a multi-scale similarity guidance network to achieve ship segmentation in heterogeneous SAR images with limited annotation data.
3. Method
3.1. Problem Setup
In the few-shot semantic segmentation of natural images, segmenting targets of different classes is considered as different segmentation task. Different from this setup, ship segmentation in SAR images collected in various scenarios are treated as different segmentation tasks because there are large differences in the data distribution of SAR images due to the different imaging satellites, various imaging resolution and so on. Therefore, in this paper, the problem of SAR ship segmentation on the small cross-domain dataset is described as follows: the ship segmentation model is trained on SAR images collected in several regions, which is called meta-training set and our goal is to use the trained model to predict SAR images in the meta-testing set, i.e., SAR images collected from the target region with few annotated samples. There is no intersection between the regions of SAR image data used in the meta-training set and the meta-testing set.
For better understanding, there is an example to illustrate the definition of the meta-training and the meta-testing, as shown in Figure 2. The SAR images in the meta-training set are collected from AswanDam, Barcelone, Houston, and Singapore, while the SAR images in the meta-testing set are collected from Qingdao and Strait Gibraltar. Both the meta-training set and the meta-testing set consist of several episodes. The episode is the sample unit which is composed of a support set and a query set . The support set is consisted of several support images and their corresponding segmentation annotation mask .The query set is consisted of the input query images and their labels . In the training phase, the support-query pair in the meta-training set is used to train the model. In the test phase, forms the input batch to the model, and the ground truth is used to evaluate the segmentation performance on the query image in each episode.
3.2. MSG-FN Architecture
A multi-scale similarity guidance network (MSG-FN) is proposed to perform ship segmentation in heterogeneous SAR images with few labeled data in the target domain. The MSG-FN is a matching-based few-shot learning framework with two main modules, i.e., residual block combined with FRN (Res-FRN) and multi-scale similarity guidance module (SGM), which are introduced in the following Section 3.3 and 3.4. The well-designed Res-FRN Block is proposed to capture robust and domain-independent features, and the multi-scale SGM is designed to conduct multi-scale hand-on-hand segmentation guidance.
The proposed MSG-FN is a dual-branch network and its diagram is shown in Figure 3, where the support branch contains a convolutional layer and four Res-FRN blocks, and the query branch contains an input convolutional layer, four Res-FRN blocks, three deconvolution blocks and an output convolutional layer. The support input is obtained by directly multiplying the support image with the support mask, which effectively removes the background and retains the target feature of the ship, avoiding the interference caused by the complex and changeable background. Four SGMs are embedded between these two branches at various scales to better play the guiding role of support branch to query branch. The parameter sharing mechanism is used between the support branch and query branch. The support branch extracts the multi-scale features of the ship target from the limited support images and their corresponding support masks. Then, the features of the target are fused with the query features obtained by the query branch through the multi-scale SGM. The similarity map is obtained and used to realize the segmentation of the ship target in the query image by multiplying with query features.
3.3. Residual Block Combined with FRN
The residual network (ResNet) is the most commonly used feature extraction network, which effectively reduces the difficulty of deep network training, making it possible to train networks with hundreds or even thousands of layers. There are two typical residual modules of ResNet: basic block and the bottleneck. Batch normalization (BN) is a commonly used normalization method both in the basic block and the bottleneck, which is designed to alleviate the problem of internal covariate shifting. However, BN introduces dependence among samples, which leads to performance degradation when the source domain and the target domain have different distributions. More specifically, BN first standardizes each feature in a mini-batch and learns a common slope and bias for each mini-batch in the training phase, and then the global statistics of all training samples are used to normalize each mini-batch of test data during test. The statistics of the BN layer contain the traits of the source domain [43]. If the global statistics obtained from the training samples are used to normalize the test data on the new domain, the performance degradation occurs due to differences in distribution between the source domain and the target domain. Besides, the batch size set in BN may cause correlation among samples, affecting the training process. In the task of few-shot segmentation, the batch size during training is often set relatively small due to its special problem setting, so the network may have poor convergence if BN is used.
Filter response normalization (FRN) [44] is another normalization method, which operates on each activation map of each batch sample independently, eliminating the dependency of samples in the same batch. Therefore, we propose a residual block combined with FRN, namely, Res-FRN block, to extract the domain-independent features for stronger generalization performance in target domains. As shown in Figure 4, FRN layers replace the BN layers in the designed Res-FRN block.
In the FRN layer, assuming that the shape of the input tensor is, in which B is the batch size during training, is the number of channels, and represents the width and height of the input tensor, respectively. Let be the mean squared norm of, where. The FRN is calculated as follows.
where, is a small constant to avoid the denominator being zero. Then, FRN performs affine transformation after normalization, as computed in formula (2).
where and are both learnable parameters. This transformation guarantees that the input distribution of each layer remains unchanged across different mini-batches.
The bias term is fixed as a constant in the commonly used activation function Rectified Linear Unit (ReLU), making the output value of the network lack some flexibility. Here, Threshold Linear Unit (TLU) activation function is selected as the activation function in the FRN layer as computed in formula (3), where a threshold is set as an optimizable parameter, which increases the flexibility of the network.
In addition, FRN is carried out on a per-channel basis, which ensures that all convolution kernel parameters have the same relative importance in the final model.
3.4. Multi-scale Similarity Guidance Module
Most of the existing few-shot semantic segmentation methods [37,38] fuse the extracted support features with the query features at a single scale to achieve the guidance. The features extracted from the support branch are precious, as they determine the final category the network will segment. However, inefficient support feature utilization is occurred in the above methods. Specifically, the one single scale guidance only considers the single output from the end of the network, which does not take full advantage of the multi-scale context features. Besides, ship targets have the characteristics of multiple scales, and the sizes of ships in the SAR images have significant differences. The fusion of support features and query features at a single scale is not enough to achieve the segmentation of ships of various scales. For example, if only the deepest features of the network are used to perform guidance, the segmentation of small targets will be greatly affected, and even lead to complete loss of information because that the small-scale targets may lose location information as the depth of the network increases. Therefore, a multi-scale similarity guidance module is proposed to apply sufficient hand-on-hand guidance of support features to query features of different scales, which also enhances the adaptability of the algorithm to ship targets of different scales.
The architecture of the designed multi-scale SGM embedded in the proposed MSG-FN is illustrated in Figure 3. There are four residual blocks (Res-FRN1, Res-FRN2, Res-FRN3, Res-FRN4) in the encoder part of both the support branch and the query branch. Four SGMs are embedded between the support feature and the corresponding query feature with multi-scale sizes. The internal structure of the SGM is shown in Figure 5. The inputs are support feature and query feature, which are extracted by the residual blocks from the support branch and the query branch. The support feature contains semantic category information of the target, and the feature vector of the target is obtained through global average pooling, which contains global context semantic features of the ship target. Then, the cosine function is used to measure the similarity between the target feature vector obtained from the support image and the feature vector at each pixel in the query feature. Finally, a similarity matrix is generated as the guidance map to activate the target ship area in query image by using the prior information in support feature.
The guidance map, which is the output of the SGM, is calculated as follows.
where, represents the similarity value between the query feature and the feature vector at the pixel position of, and the value range is [-1,1]. and are the support feature vector and query feature vector at the pixel position of, respectively. is the target feature vector, and is the element of. is calculated as follows, which is the average of all the pixels on the support feature map.
3.5. Training and Inference
The whole training and inference procedures of the proposed MSG-FN on few-shot ship segmentation are summarized in Algorithm 1.
| Algorithm 1 The training and test procedures of the proposed MSG-FN |
| Input: Meta-training set and meta-testing set . |
| Output: Network parameters . |
| Initialization: Initialize MSG-FN with Kaiming uniform |
| for each episode in do |
| 1. Extract feature from the support branch and query branch to obtain support features and query features . |
| 2. Get the similarity guide map for the query image. |
| 3. Obtain the guided query features by multiplying and , and , and , and ,respectively. |
| 4. Fuse feature at different scale: |
| 1) Concatenate the with up-sampled and then feed it into the Res-FRN block to get . |
| 2) Concatenate the with up-sampled and then feed it into the Res-FRN block to get . |
| 3) Concatenate the with up-sampled and then feed it into the Res-FRN block to get . |
| 5. Predict the segmentation mask of query image by feeding the to a Convout layer. |
| 6. Update to minimize the cross-entropy loss via SGD. |
| End |
| for each episode in do |
| 1. Put-forward the and into the well-trained MSG-FN. |
| 2. Predict the segmentation mask of query image. |
| End |
4. Experiment
4.1. SARShip-4i Dataset
This paper aims at ship segmentation in SAR images under the condition of few annotated samples in the target domain, and the proposed MSG-FN should be evaluated on the few-shot ship segmentation dataset consisting of SAR images. However, there is no SAR dataset available so far to evaluate the performance of the few-shot ship segmentation algorithms. Therefore, we built a SAR dataset named SARShip-4i with reference to current COCO-20i [45] and Pascal-5i [46] datasets used for few-shot natural image segmentation to evaluate the proposed MSG-FN method for few-shot ship segmentation.
The SAR images in SARShip-4i dataset consist of two parts, one is the self-collected SAR images, whose segmentation labels are provided by our pixel-by-pixel manual annotation, and the other is the SAR images in the dataset HRSID [47], whose segmentation labels is generated based on the segmentation polygons provided in HRSID. SARShip-4i dataset contains 140 high-resolution SAR images from different imaging satellites and polarization methods, with resolutions ranging from 0.3 meters to 5 meters. The detailed information of the SAR images in the SARShip-4i dataset is shown in Table 1.
The high-resolution SAR images are cropped to several image patches and rescaled to the same size of 512×512, and there is a total of 6961 image patches in the SARShip-4i dataset. As mentioned in Section 3.1, SAR ship segmentation in different regions are treated as different segmentation tasks. The meta-training set and meta-testing set are set as SAR data from different regions considering different imaging modes and regional factors, and there is no intersection between the regions of SAR data used in the meta-training set and those predicted in the meta-testing set. The cross-validation strategy is applied here to evaluate the proposed MSG-FN. The SAR image patches in the SARShip-4i dataset are divided into 4 folds according to imaging regions, as shown in Table 2. In each fold, the SAR image patches in a fold form the meta-testing set, and SAR image patches in other three folds form the meta-training set. To the best of our knowledge, SARShip-4i is the first dataset can be used to evaluate the few-shot ship segmentation methods in the SAR images.
4.2. Implementation Details
In the setting of few-shot ship segmentation in the SAR images, the training process is carried out in a meta-learning manner, and the fundamental unit for training and testing is the episode. Each episode is composed of a support set and a query set. Each support set consists of several image patches, for example, the support set contains 5 image patches in the 1-way 5-shot, and the query set contains one image patch in this paper. Before training and testing, the image patch in the dataset should be organized into episode-based data. That is, an episode is generated by randomly selecting several image patches as a support-query pair, and it is necessary to ensure that three are no duplicate image patches between the support set and the query set in an episode.
The backbone of the proposed MSG-FN is selected as the lightweight ResNet-18. Because of the large difference between the SAR images and natural images, the parameter pre-trained on large-scale natural image datasets such as ImageNet or COCO cannot be used to initialize our model, and our model is trained from scratch. In the training phase, the network is optimized with stochastic gradient descent (SGD), the batch size is set as 3, and the momentum and weight decay are set as 0.9 and 0.0001, respectively. The learning rate linearly increases from 0 to 0.001 in the first 2000 steps and then decays exponentially to 300000th steps with the decay rate of 0.9. The network is implemented using PyTorch, and all networks are trained and tested on NVIDIA GTX 1080 GPUs with 8GB Memory.
4.3. Evaluation Metrics
There are four evaluation metrics used to evaluate the performance of the proposed MSG-FN, i.e., Precision, Recall, F1, and intersection over union (IoU). Precision and Recall are a pair of contradictory evaluation matrices, neither of which can fully measure the segmentation performance. F1 is a more comprehensive evaluation criteria, which maintains a trade-off between Precision and Recall. IoU is used to measure the degree of overlap between the segmentation result and the ground truth. These four evaluation metrics are calculated as follows.
where, is the number of categories of the target to be segmented, and is set as 1 here, because that only ship is the target in this paper. is the number of pixels that are inferred to belong to class with the ground truth of class . In other words, , and represent the numbers of true positives, false positives and false negatives, respectively.
4.4. Comparison with the State-of-the-arts
The proposed MSG-FN is evaluated against some state-of-the-art few-shot semantic segmentation methods under two experimental settings, namely, 1-way 1-shot, and 1-way 5-shot. 1-way 1-shot means that only one annotated support image is used to guide the ship segmentation when making predictions on the query image of the unseen test data, and 1-way 5-shot refers to using five support images to guide the segmentation of the query image. In the setting of 1-way 5-shot, the final segmentation result is the average ensemble of the predicted masks generated with the guidance from the 5 support images, which is calculated as follows.
where, is the predicted semantic label of the pixel at corresponding to the support image .
There is no work specifically designed for few-shot SAR ship segmentation, and thus we modify the state-of-the-art few-shot semantic segmentation approaches on natural images to fit our settings for algorithm comparison. In the experiments, the training and testing settings specified in Section 4.1 are adopted. The experimental results of the proposed MSG-FN and three comparison methods on the settings of 1-way 1-shot and 1-way 5-shot are shown in Table 3 and Table 4, respectively.
The segmentation results on the four folds as well as the mean results are given in Table 3 and Table 4. We pay more attention to the mean results, which comprehensively evaluate the performance of the segmentation algorithm. The performance of the proposed methods achieves the best in terms of precision, F1, and IoU under the settings of both 1-way 1-shot and 1-way 5-shot. The recall of the proposed MSG-FN is a little bit lower than that of the PMMs [48]. This is because Precision and Recall are contradictory, that is, if Precision is high, Recall is low, and vice versa. These two metrics cannot comprehensively measure the segmentation performance compared with F1 and IoU. In particular, the F1 and IoU of our method are 74.35% and 63.60% on the setting of 1-way 1-shot, and 74.37% and 63.62% on the setting of 1-way 5-shot. The results on the setting of 1-way 5-shot are better than that on the setting of 1-way 1-shot because there are more images in the target domain are provided on the setting of 1-way 5-shot.
The segmentation results on several samples are presented in Figure 6 to visually illustrate the superiority of the proposed MSG-FN. The first three rows in Figure 6 are samples of ship segmentation in the off-shore scenes, and the last three rows are samples in the inshore scenes. The first and second columns are the SAR image and the ground truth of ship segmentation, and the third to sixth columns are the segmentation results of the SG-One [37], PMMs [48], RPMMs [48], and the proposed MSG-FN methods, respectively. It is obvious that the segmentation results of the proposed MSG-FN are more consistent with the ground truth compared with other three methods. SG-One [37] has missing segmentation for some small-scale ship targets as shown by the dashed yellow circles in the third and fifth rows. Meanwhile, there are many false alarms in the segmentation result of SG-One in complex inshore scenes, as shown by the dashed red circles in the fourth and sixth rows. The reason for the above phenomenon is that SG-One uses only a single-scale guidance module, and its applicability to ship targets of various scales is inferior to our method. The segmentation results of the PMMs [48] and RPMMs [48] in the off-shore scene are similar to that of our method because the background in the off-shore scene is relatively simple. As for the inshore ship segmentation with a more complex and changeable background, there are many false alarms appearing in the segmentation results of PMMs and RPMMs, as shown by the dashed red circles in the fourth row and sixth row. This is because PMMs and RPMMs use a simple up-sampling interpolation method in the decoder part, while the proposed MSG-FN utilizes a U-shaped encoder-decoder structure. In conclusion, the experiments demonstrate that the segmentation results of the proposed MSG-FN are superior than other state-of-the-arts in terms of both quantitative metrics and qualitative visualization.
4.5. Analysis of the Learning Strategy
In this section, we analysis three kinds of learning strategies, which are typically used to migrate models from the source domain to the target domain, to validate the effectiveness of the few-shot strategy used in the proposed MSG-FN. The comparison results are reported in Table 5. U-Net [27] and PSPNet [30] are two classic segmentation methods, where the model trained on the source domain is directly used to perform inference on the target domain. U-Net (TL) and PSPNet (TL) are applied with transfer learning strategy, which utilize 40% of data from the target domain to fine-tune the model trained on the source domain. MSG-FN (1-shot) and MSG-FN (5-shot) are the proposed few-shot methods on the settings of the 1-way 1-shot and 1-way 5-shot.
As reported in Table 5, the performance of segmentation is poor when the trained model is directly used for prediction in the target domain. The performance has improved after utilizing the transfer learning strategy because a large amount of target information is learned to narrow the gap between the source domain and the target domain. Although transfer learning brings performance improvement, this strategy requires that a certain number of annotated samples are available for training in the target domain, which is not feasible in practical applications. It is noted that the proposed few-shot MSG-FN method has achieved the best performance. This is because the few-shot MSG-FN obtains meta information about each domain data over series of episodes training and it utilizes meta information for prediction on unseen data. Besides, the amount of the required labeled data in target domain has been greatly reduced compared with the transfer learning methods. The experiment results have verified that the few-shot learning strategy in the proposed MSG-FN is effective to solve the problem of semantic segmentation of SAR images with few labeled training data available in the target domain.
4.6. Ablation Study
In this section, the ablation experiments are carried out to verify the effectiveness of the two main modules in the proposed MSG-FN. The fourth fold SARShip-43 defined in Table 2 is selected randomly to perform the ablation study under the setting of 1-way 1-shot. The results of the ablation experiments are shown in Table 6. W/o Res-FRN represents a simplified version of MSG-FN, in which the Res-FRN block is replaced by the plain residual block. W/o Multi-scale SGM represents another simplified version of MSG-FN, in which the multi-scale similarity guidance module is removed and only a single similarity guidance module is deployed at the end of the encoder part.
Res-FRN block. As shown in Table 6, the experiments demonstrate that MSG-FN with the proposed Res-FRN block achieves significant improvements by 10.84% and 12.71% in term of F1 and IoU over the W/o Res-FRN method, which indicates that Res-FRN block extracts the domain-independent features and has stronger generalization performance in target domains than the plain residual block.
Multi-scale SGM. In the proposed MSG-FN, multi-scale similarity guidance module is used to perform hand-on-hand guidance of support features to query features of various scales. Its performance has been improved by 0.34% and 0.61% in term of F1 and IoU compared to using a single similarity guidance module, which illustrates the adequacy of the hand-on-hand guidance, especially for the segmentation targets with various scales.
5. Conclusions
In this paper, a multi-scale similarity guidance network (MSG-FN) is proposed to perform the segmentation of ship targets in heterologous SAR images with few labeled data in the target domain. The proposed MSG-FN is a matching-based few-shot learning framework, which has two main innovations. The first one is the well-designed Res-FRN block, which is proposed to capture robust and domain-independent features. The second is a multi-scale similarity guidance module, which is proposed to provide sufficient hand-on-hand guidance of support features to query features of different scales, enhancing the adaptability of the algorithm to ship targets of different scales. In addition, a SAR ship segmentation dataset named SARShip-4i is built by ourselves to evaluate the performance of the few-shot ship segmentation methods in SAR images. Experimental results on the SARShip-4i dataset show that the proposed MSG-FN achieves superior segmentation results compared with other state-of-the-art few-shot methods. Our method requires only few annotated data in the target domain to obtain satisfactory segmentation performance in the target domain without degradation, providing a practical and feasible solution to the problem of SAR image segmentation in heterologous images.
Author Contributions
Conceptualization, R. L. and S. G.; methodology, R. L. and J. L.; software, J. L. and H. L.; writing—original draft, J. L. and R. L.; writing—review and editing, S. G., S. M. and Z. G.; visualization, R. L.; supervision, R. L. and S. G.; funding acquisition, R. L. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the National Natural Science Foundation of China (Grant No. 62102296) and the Fundamental Research Funds for the Central Universities (Grant No. XJS222221, XJS222215)
Data Availability Statement
The SARShip-4i datasets can be obtained from https://drive.google.com/file/d/15Q-5A_GQBAQTOp9rHXedbU7S1Dti-tR9/view?usp=share_link. The code is available at https://github.com/imiuupload/MSG-FN.
Acknowledgments
The authors would like to express their gratitude to the editors and the anonymous reviewers for their insightful comments.
Conflicts of Interest
The authors declare no conflict of interest.
Abbreviations
The following abbreviations and mathematical symbols are used in this manuscript:
| SAR | Synthetic aperture radar. |
| MSG-FN | Multi-scale similarity guidance few-shot network. |
| CFAR | Constant false alarm rate. |
| CNN | Convolutional neural network. |
| FSL | Few-Shot learning. |
| FRN | Filter response normalization. |
| FCN | Fully convolutional network. |
| PPM | Pyramid pooling module. |
| ASPP | Atrous spatial pyramid pooling. |
| Res-FRN | Residual block combined with FRN. |
| SGM | Similarity guidance module. |
| ResNet | Residual network. |
| BN | Batch normalization. |
| TLU | Threshold Linear Unit. |
| ReLU | Rectified Linear Unit. |
| SGD | Stochastic gradient descent. |
| IoU | Intersection over union. |
| The number of categories in the training set. | |
| The number of samples of each category in the training set. | |
| The number of training samples. | |
| , | The meta-training set and the meta-testing set. |
| The support set and the query set. | |
| The support image and its segmentation label. | |
| The query image and its segmentation label. | |
| The input tensor of the FRN layer. | |
| The batch size during training. | |
| The number of channels. | |
| The width and height of | |
| A small constant. | |
| , | Learnable parameters. |
| The similarity value. | |
| The support feature vector. | |
| The query feature vector. | |
| The target feature vector. | |
| The number of true positives. | |
| The number of false positives. | |
| The number of false negatives. | |
| The predicted semantic label of pixel at |
References
- Z. Lin, K. Ji, X. Leng, and G. Kuang, “Squeeze and excitation rank faster R-CNN for ship detection in SAR images,” IEEE Geosci. Remote. Sens. Lett., vol. 16, no. 5, pp. 751–755, 2019.
- X. Zhang, H. Wang, C. Xu, Y. Lv, C. Fu, H. Xiao, and Y. He, “A lightweight feature optimizing network for ship detection in SAR image,” IEEE Access, vol. 7, pp. 141 662–141 678, 2019.
- Z. Cui, Q. Li, Z. Cao, and N. Liu, “Dense attention pyramid networks for multi-scale ship detection in SAR images,” IEEE Trans. Geosci. Remote. Sens., vol. 57, no. 11, pp. 8983–8997, 2019.
- Zhang, Qianying, et al., "Improved K-means active contours stem," Journal of Image & Graphics, 2015.
- Xia, X., et al., "Salient object segmentation based on active contouring," Plos One 2018.1:1-10.
- Liu L, et al. "Active Contour Model Based on Entropy Fitting for Image Segmentation," Journal of Jilin University, 2016.
- Xu, Lingling, et al., "An Improved C-V Image Segmentation Method Based on Level Set Model " International Conference on Intelligent Networks and Intelligent Systems IEEE, 2008:507-510.
- Visalakshi, N. Karthikeyani, and J. Suguna. "K-means clustering using Max-min distance measure," Nafips 2009 Meeting of the North American IEEE, 2009:1-6.
- Dubey, Yogita K., and M. M. Mushrif, "FCM Clustering Algorithms for Segmentation of Brain MR Images," Advances in Fuzzy Systems, 2016.3:1-14.
- PHAM D L,PRINCE J L, “An adaptive fuzzy C-means algorithm for image segmentation in the presence of intensity inhomogeneities,” Pattern Recognition Letters, 1999, 20(1):57 - 68.
- Salem, Wedad S., H. F. Ali, and A. F. Seddik, "Spatial Fuzzy C-Means Algorithm for Bias Correction and Segmentation of Brain MRI Data," International Conference on Biomedical Engineering and Science 2015.
- Jian, et al., "New CFAR target detector for SAR images based on kernel density estimation and mean square error distance," Journal of Systems Engineering and Electronics 23(1):40-46,2012.
- Huang, Shiqi, W. Huang, and T. Zhang, "A New SAR Image Segmentation Algorithm for the Detection of Target and Shadow Regions," Sci Rep 6:38596, 2016.
- Hou, Biao, X. Chen, and L. Jiao, "Multilayer CFAR Detection of Ship Targets in Very High Resolution SAR Images," IEEE Geoscience & Remote Sensing Letters, 2014.12.4:811-815.
- Crisp D J . The state-of-the-art in ship detection in Synthetic Aperture Radar imagery. organic letters, 2004.
- Tan M , Le Q V . EfficientNet: Rethinking Model Scaling for Convolutional Neural Networks[J]. 2019.
- Lin T Y , Goyal P , Girshick R , et al. Focal Loss for Dense Object Detection[J]. IEEE Transactions on Pattern Analysis & Machine Intelligence, 2017, PP(99):2999-3007.
- Chen L C , Zhu Y , Papandreou G , et al. Encoder-Decoder with Atrous Separable Convolution for Semantic Image Segmentation[J]. Springer, Cham, 2018.
- Ding H , Jiang X , Shuai B , et al. Semantic Correlation Promoted Shape-Variant Context for Segmentation[C]// 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). IEEE, 2019.
- Henry C , Azimi S M , Merkle N . Road Segmentation in SAR Satellite Images With Deep Fully Convolutional Neural Networks[J]. IEEE Geoscience and Remote Sensing Letters, 2018.
- Bianchi F M , Grahn J , Eckerstorfer M , et al. Snow Avalanche Segmentation in SAR Images With Fully Convolutional Neural Networks[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2020, PP(99):1-1.
- Vanschoren J. Meta-learning: A survey[J]. arXiv preprint arXiv:1810.03548, 2018.
- Dan C C , Giusti A , Gambardella L M , et al. Deep Neural Networks Segment Neuronal Membranes in Electron Microscopy Images[J]. Advances in neural information processing systems, 2012, 25:2852-2860.
- LONG J, SHELHAMER E, DARRELL T, “Fully convolutional networks for semantic segmentation,” Proceedings of the IEEE Conference Oil Computer Vision and Pattern Recognition, 2015:3432-3440..
- Badrinarayanan V, Kendall A, Cipolla R, “Segnet: A deep convolutional encoder-decoder architecture for image segmentation,” IEEE transactions on pattern analysis and machine intelligence, 2017, 39(12): 2481-2495.
- Yu, Fisher, and V. Koltun, "Multi-Scale Context Aggregation by Dilated Convolutions," 2015.
- Ronneberger O, Fischer P, Brox T, “U-net: Convolutional networks for biomedical image segmentation,” International Conference on Medical image computing and computer-assisted intervention. Springer, Cham, 2015: 234-241.
- Lin G, Milan A, Shen C, et al., “Refinenet: Multi-path refinement networks for high-resolution semantic segmentation,” IEEE Conference on Computer Vision and Pattern Recognition (CVPR). 2017.
- M. R. Rezaee, P. M. J. van der Zwet, B. P. E. Lelieveldt, R. J. van der Geest and J. H. C. Reiber, "A multiresolution image segmentation technique based on pyramidal segmentation and fuzzy clustering," in IEEE Transactions on Image Processing, vol. 9, no. 7, pp. 1238-1248, July 2000. [CrossRef]
- H. Zhao, J. Shi, X. Qi, X. Wang and J. Jia, "Pyramid Scene Parsing Network," 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 2017, pp. 6230-6239. [CrossRef]
- Chen L C, Papandreou G, Schroff F, et al. Rethinking atrous convolution for semantic image segmentation[J]. arXiv preprint arXiv:1706.05587, 2017.
- M. Yang, K. Yu, C. Zhang, Z. Li and K. Yang, "DenseASPP for Semantic Segmentation in Street Scenes," 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 2018, pp. 3684-3692. [CrossRef]
- Finn C, Abbeel P, Levine S. Model-agnostic meta-learning for fast adaptation of deep networks[J]. arXiv preprint arXiv:1703.03400, 2017.
- Nichol A, Schulman J. Reptile: a scalable metalearning algorithm[J]. arXiv preprint arXiv:1803.02999, 2018, 2(3): 4.
- Snell J, Swersky K, Zemel R. Prototypical networks for few-shot learning[J]. Advances in neural information processing systems, 2017, 30: 4077-4087.
- Liu Y, Zhang X, Zhang S, et al. Part-aware prototype network for few-shot semantic segmentation[C]//European Conference on Computer Vision. Springer, Cham, 2020: 142-158.
- Zhang X, Wei Y, Yang Y, et al. Sg-one: Similarity guidance network for one-shot semantic segmentation[J]. IEEE Transactions on Cybernetics, 2020, 50(9): 3855-3865.
- Zhang C, Lin G, Liu F, et al. Canet: Class-agnostic segmentation networks with iterative refinement and attentive few-shot learning[C]//Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. 2019: 5217-5226.
- J.-M. Perez-Rua, X. Zhu, T. Hospedales, and T. Xiang, “Incremental Few-Shot Object Detection,” in CVPR, 2020.
- B. Kang, Z. Liu, X. Wang, F. Yu, J. Feng, and T. Darrell, “Few-shot Object Detection Via Feature Reweighting,” in ICCV, 2019.
- Wang K, Liew J H, Zou Y, et al. Panet: Few-shot image semantic segmentation with prototype alignment[C]//Proceedings of the IEEE/CVF International Conference on Computer Vision. 2019: 9197-9206.
- Tian P, Wu Z, Qi L, et al. Differentiable meta-learning model for few-shot semantic segmentation[C]//Proceedings of the AAAI Conference on Artificial Intelligence. 2020, 34(07): 12087-12094.
- Li Y , Wang N , Shi J , et al. Revisiting Batch Normalization For Practical Domain Adaptation[J]. Pattern Recognition, 2016, 80.
- Singh S , Krishnan S . Filter Response Normalization Layer: Eliminating Batch Dependence in the Training of Deep Neural Networks[C]// 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). IEEE, 2020.
- Shaban A , Bansal S , Liu Z , et al. One-Shot Learning for Semantic Segmentation[J]. British Machine Vision Conference 2017, 2017.
- Nguyen K, Todorovic S. Feature weighting and boosting for few-shot segmentation[C]//Proceedings of the IEEE International Conference on Computer Vision. 2019: 622-631.
- Wei S , Zeng X , Qu Q , et al. HRSID: A High-Resolution SAR Images Dataset for Ship Detection and Instance Segmentation[J]. IEEE Access, 2020, 8:1-1.
- Yang B, Liu C, Li B, et al. Prototype Mixture Models for Few-Shot Semantic Segmentation[C]//European Conference on Computer Vision. Springer, Cham, 2020: 763-778.
Figure 1.
Typical structure of the few-shot semantic segmentation.
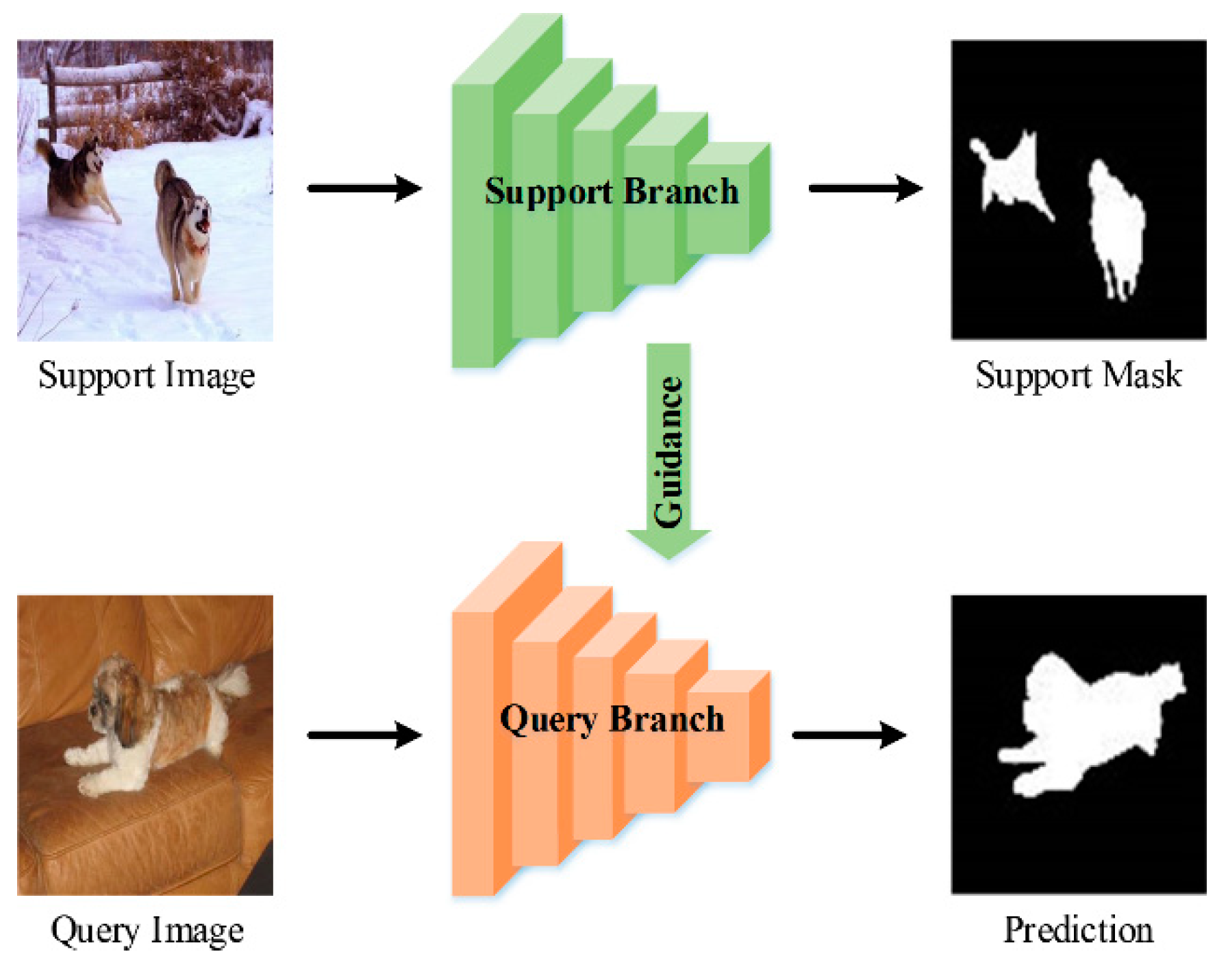
Figure 2.
Schematic diagram of the meta-training set and the meta-testing set defined in the task of one-shot SAR ship segmentation.
Figure 2.
Schematic diagram of the meta-training set and the meta-testing set defined in the task of one-shot SAR ship segmentation.
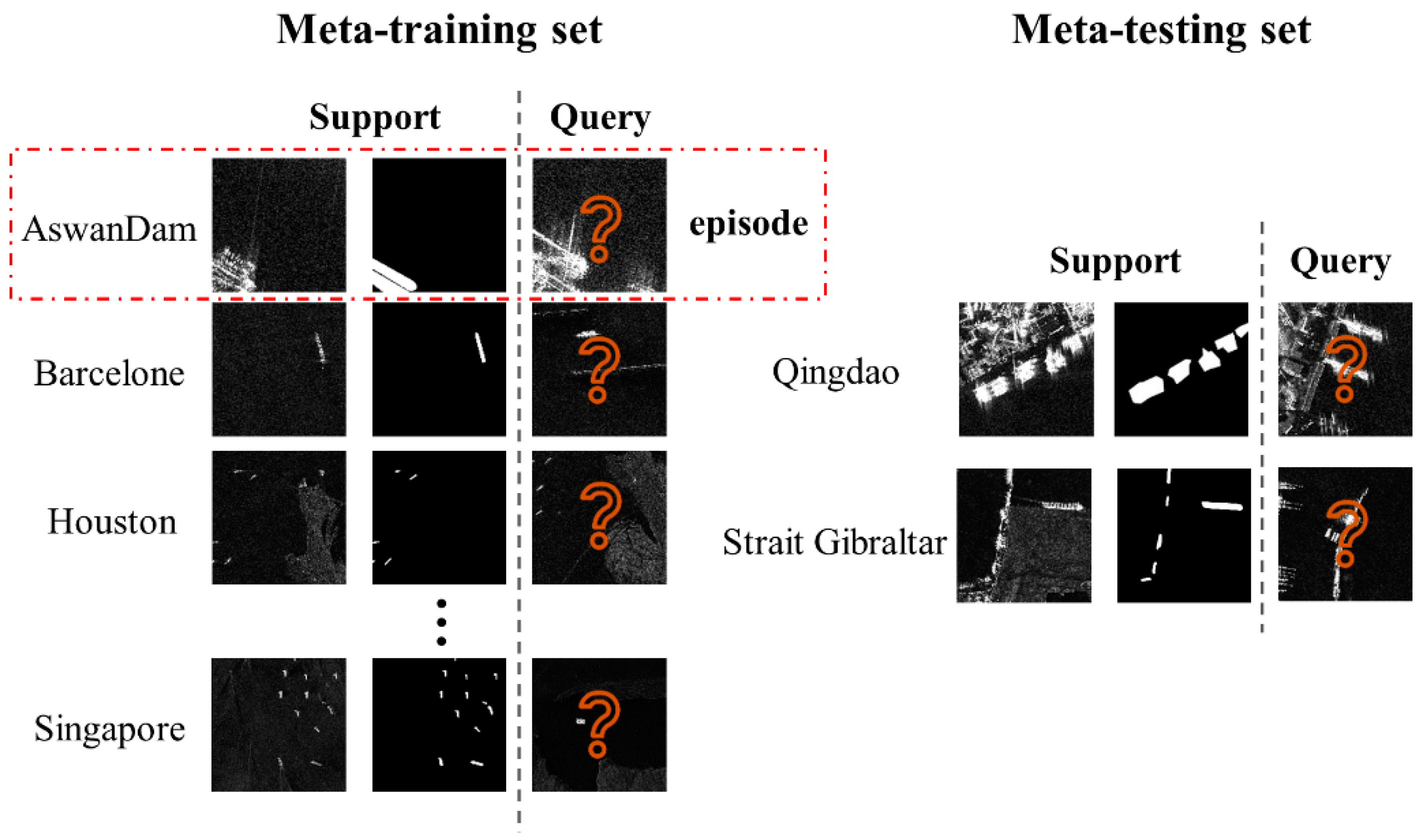
Figure 3.
Schematic diagram of the proposed MSG-FN.
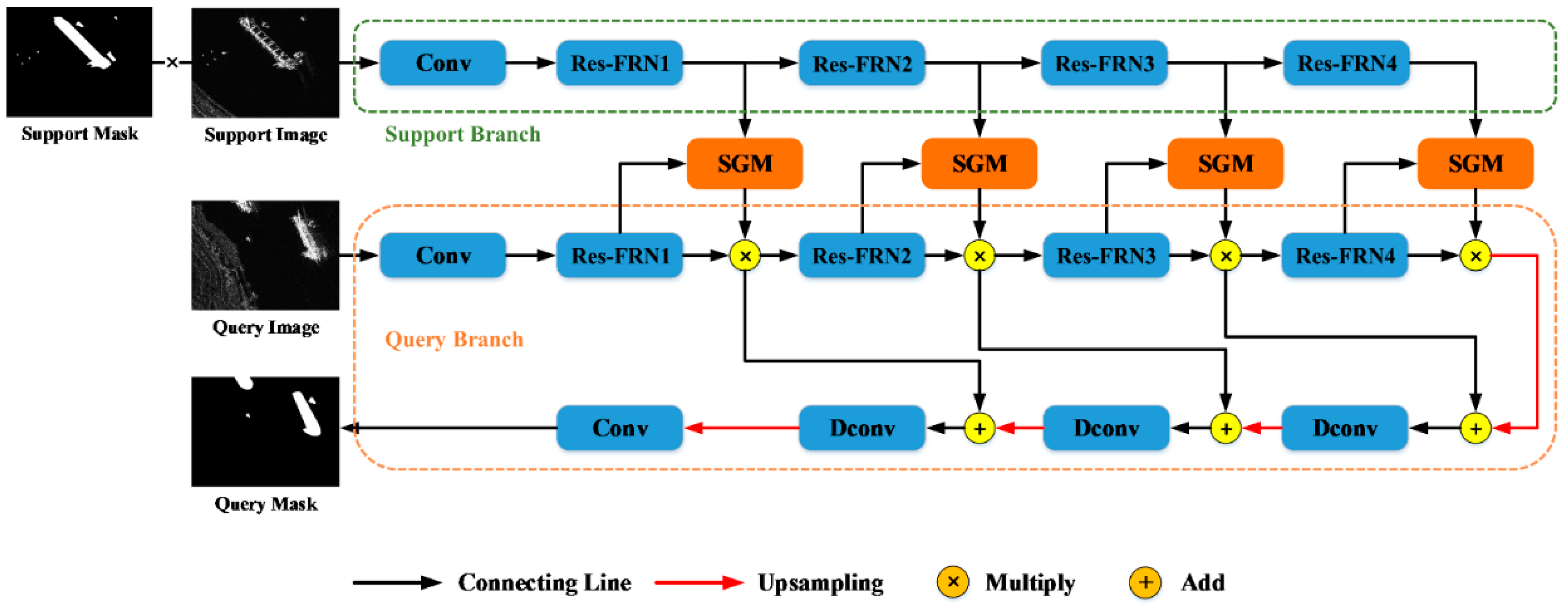
Figure 4.
Schematic diagram of the designed Res-FRN block. (a) Res-FRN block (basic); (b) Res-FRN block (bottleneck).
Figure 4.
Schematic diagram of the designed Res-FRN block. (a) Res-FRN block (basic); (b) Res-FRN block (bottleneck).
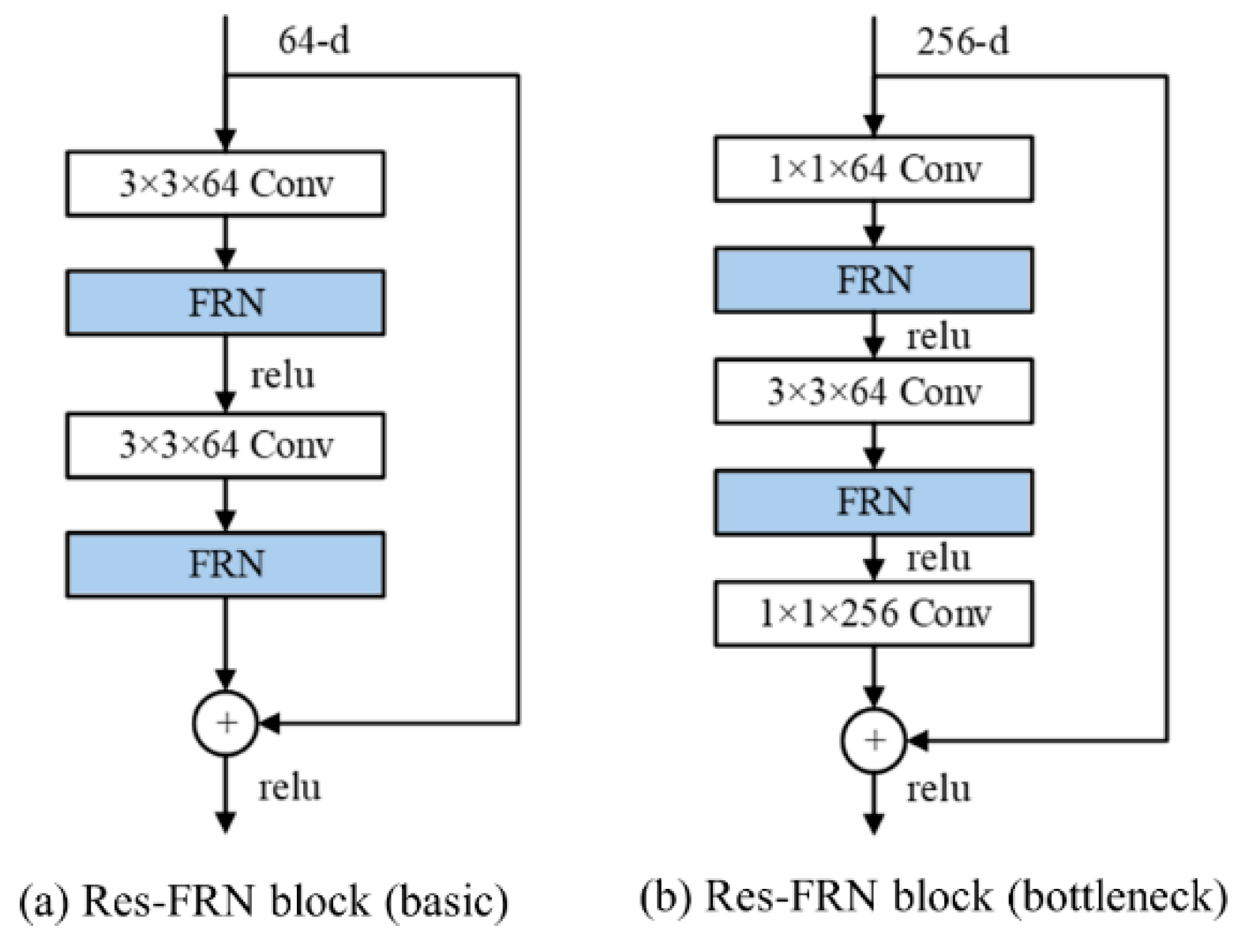
Figure 5.
The internal structure of the similarity guidance module.
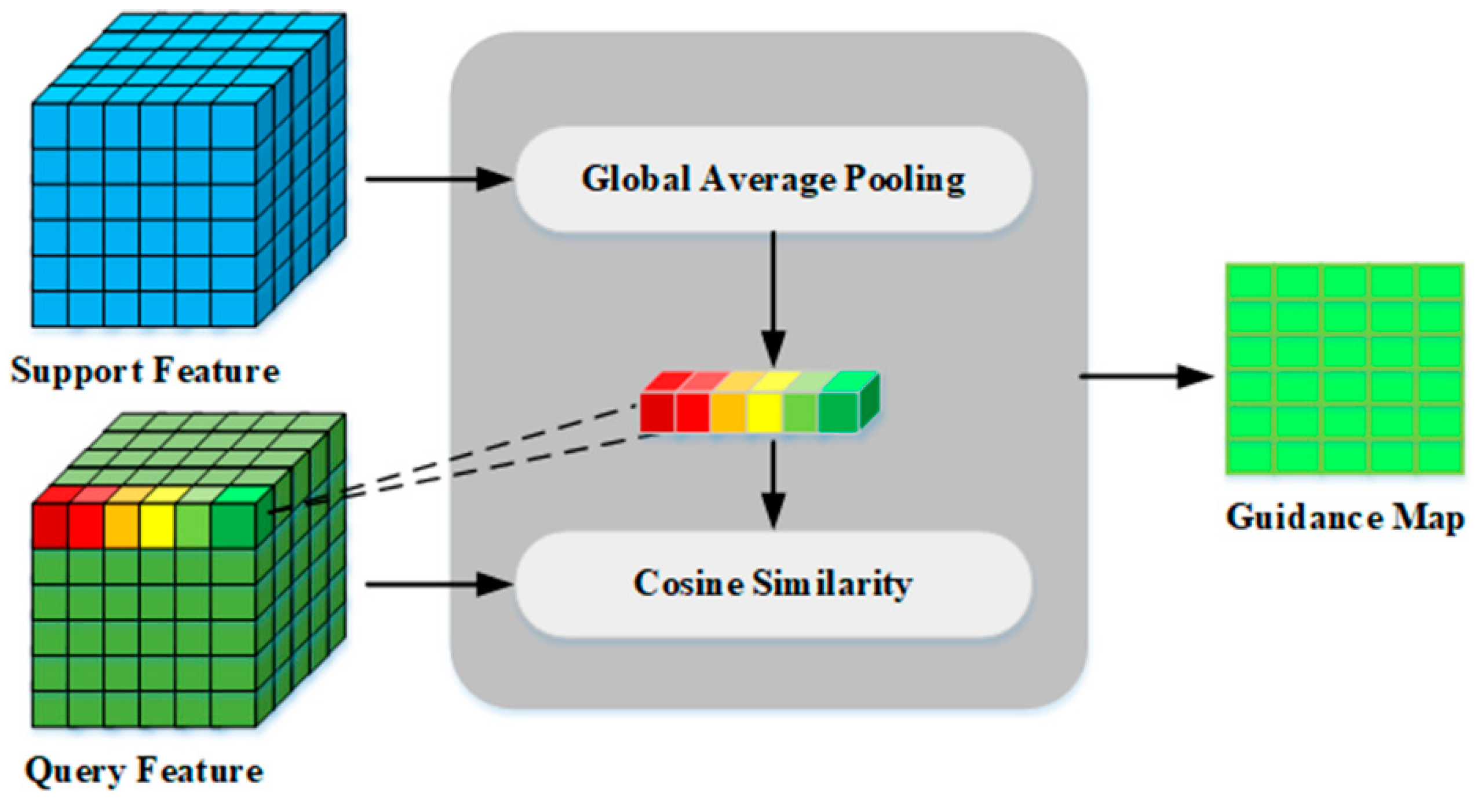
Figure 6.
Visualization of segmentation results of the proposed MSG-FN and three comparison methods. (a) Original SAR image; (b) Ground truth; (c) Prediction results of SG-One [37]; (d) Prediction results of PMMs [48]; (e) Prediction results of RPMMs [48]; (f) Prediction results of MSG-FN.
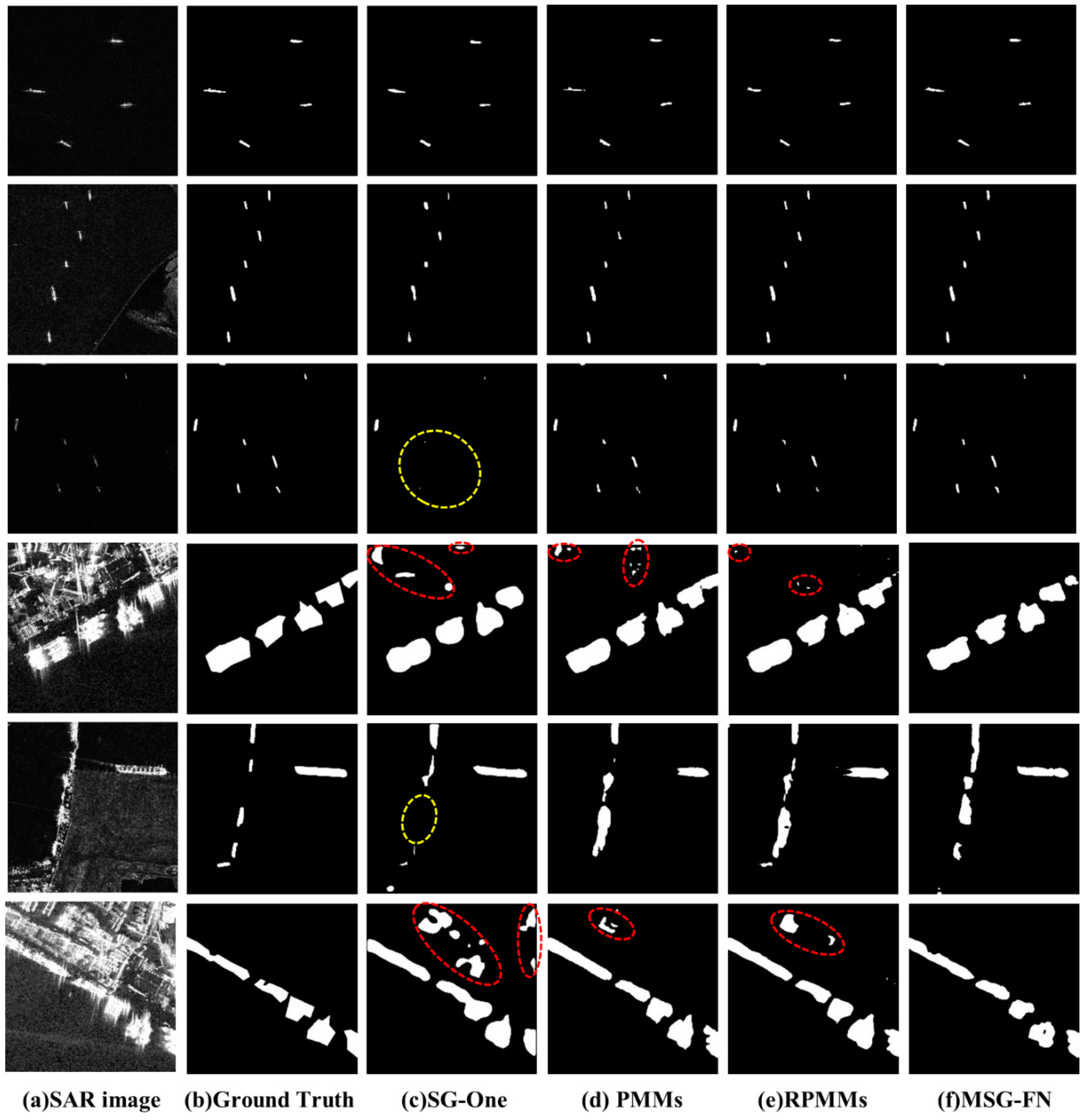

Table 1.
The detailed information of SAR images in the SARShip-4i dataset.
| Region | Imaging satellite | Resolution(m) | Number of images | Imaging mode | Polarization |
| Qingdao | TanDEM-X | 0.3 | 1 | ST | HH |
| Shanghai | TanDEM-X | 0.3 | 1 | ST | HH |
| Hong Kong | TerraSAR-X | 1.0 | 1 | HS | HH |
| Istanbul | TerraSAR-X | 0.3 | 1 | ST | VV |
| Houston | Sentinel-1B | 3 | 40 | S3-SM | HH |
| Sao Paulo | Sentinel-1B | 3 | 21 | S3-SM | HH |
| Sao Paulo | Sentinel-1B | 3 | 20 | S3-SM | HV |
| Barcelona | TerraSAR-X | 3 | 23 | SM | VV |
| Chittagong | Sentinel-1B | 3 | 18 | S3-SM | VV |
| Aswan Dam | TerraSAR-X | 0.5 | 2 | ST | HH |
| Shanghai | TerraSAR-X | 0.5 | 2 | ST | HH |
| Panama Canal | TanDEM | 1 | 1 | HS | HH |
| Visakhapatnam | TerraSAR-X | 1 | 1 | HS | VV |
| Singapore | TerraSAR-X | 3 | 4 | SM | HH |
| Strait Gibraltar | TerraSAR-X | 3 | 2 | SM | HH |
| Port Sulphur | TerraSAR-X | 3 | 1 | SM | VV |
| Bay Plenty | TerraSAR-X | 3 | 1 | SM | VV |
Table 2.
Details of the fold partition used for cross-validation in the SARShip-4i dataset.
| Fold | Test Regions |
| SARShip-40 | Visakhapatnam, Hong Kong, Barcelona, Chittagong |
| SARShip-41 | Shanghai-HH, Singapore, Shanghai, Sao Paulo-HV |
| SARShip-42 | Panama Canal, Bay Plenty-Sulphur, Istanbul, Sao Paulo-HH |
| SARShip-43 | Aswan Dam, Strait Gibraltar, Qingdao, Houston |
Table 3.
Segmentation results of the proposed MSG-FN and three state-of-the-art methods under the setting of 1-way 1-shot.
Table 3.
Segmentation results of the proposed MSG-FN and three state-of-the-art methods under the setting of 1-way 1-shot.
| Metric | Method | SARShip-40 | SARShip-41 | SARShip-42 | SARShip-43 | Mean |
| Precision | SG-One [37] | 0.4075 | 0.5777 | 0.5632 | 0.5507 | 0.5248 |
| PMMs [48] | 0.6018 | 0.8717 | 0.6827 | 0.7973 | 0.7384 | |
| RPMMs [48] | 0.6023 | 0.7252 | 0.7477 | 0.7805 | 0.7139 | |
| MSG-FN (ours) | 0.6822 | 0.6890 | 0.8453 | 0.8221 | 0.7597 | |
| Recall | SG-One [37] | 0.5208 | 0.6013 | 0.7093 | 0.6673 | 0.6247 |
| PMMs [48] | 0.7512 | 0.6469 | 0.8667 | 0.8526 | 0.7794 | |
| RPMMs [48] | 0.6940 | 0.7692 | 0.8246 | 0.8295 | 0.7793 | |
| MSG-FN (ours) | 0.6699 | 0.7939 | 0.7889 | 0.8471 | 0.7750 | |
| F1 | SG-One [37] | 0.4204 | 0.5266 | 0.5865 | 0.5710 | 0.5261 |
| PMMs [48] | 0.6264 | 0.7265 | 0.7232 | 0.8132 | 0.7223 | |
| RPMMs [48] | 0.6129 | 0.7297 | 0.7538 | 0.7930 | 0.7224 | |
| MSG-FN (ours) | 0.6422 | 0.7026 | 0.8011 | 0.8282 | 0.7435 | |
| IoU | SG-One [37] | 0.3038 | 0.3790 | 0.4359 | 0.4287 | 0.3869 |
| PMMs [48] | 0.5081 | 0.5853 | 0.6035 | 0.7068 | 0.6009 | |
| RPMMs [48] | 0.4897 | 0.6027 | 0.6320 | 0.6784 | 0.6007 | |
| MSG-FN (ours) | 0.5314 | 0.5962 | 0.6927 | 0.7236 | 0.6360 |
Table 4.
Segmentation results of the proposed MSG-FN and three state-of-the-art methods under the setting of 1-way 5-shot.
Table 4.
Segmentation results of the proposed MSG-FN and three state-of-the-art methods under the setting of 1-way 5-shot.
| Metric | Method | SARShip-40 | SARShip-41 | SARShip-42 | SARShip-43 | Mean |
| Precision | SG-One [37] | 0.4135 | 0.6830 | 0.6175 | 0.5722 | 0.5716 |
| PMMs [48] | 0.6066 | 0.8731 | 0.6840 | 0.7967 | 0.7401 | |
| RPMMs [48] | 0.6264 | 0.7544 | 0.7528 | 0.7980 | 0.7329 | |
| MSG-FN (ours) | 0.6821 | 0.6891 | 0.8451 | 0.8225 | 0.7597 | |
| Recall | SG-One [37] | 0.5191 | 0.5741 | 0.6926 | 0.6594 | 0.6113 |
| PMMs [48] | 0.7494 | 0.6456 | 0.8674 | 0.8526 | 0.7788 | |
| RPMMs [48] | 0.5938 | 0.6664 | 0.7246 | 0.7023 | 0.6718 | |
| MSG-FN (ours) | 0.6705 | 0.7938 | 0.7892 | 0.8469 | 0.7751 | |
| F1 | SG-One [37] | 0.4234 | 0.5748 | 0.6186 | 0.5822 | 0.5498 |
| PMMs [48] | 0.6292 | 0.7263 | 0.7234 | 0.8131 | 0.7230 | |
| RPMMs [48] | 0.5783 | 0.6922 | 0.7028 | 0.7360 | 0.6773 | |
| MSG-FN (ours) | 0.6425 | 0.7027 | 0.8012 | 0.8282 | 0.7437 | |
| IoU | SG-One [37] | 0.3065 | 0.4214 | 0.4661 | 0.4390 | 0.4083 |
| PMMs [48] | 0.5106 | 0.5849 | 0.6037 | 0.7067 | 0.6015 | |
| RPMMs [48] | 0.4418 | 0.5497 | 0.5590 | 0.5983 | 0.5372 | |
| MSG-FN (ours) | 0.5319 | 0.5963 | 0.6929 | 0.7237 | 0.6362 |
Table 5.
Comparison of different learning strategy used in the ship segmentation methods.
| Method | IoU | Precision | Recall | F1-score |
| U-Net [27] | 0.5085 | 0.6461 | 0.7527 | 0.6411 |
| PSPNet [30] | 0.4481 | 0.5086 | 0.8009 | 0.5659 |
| U-Net (TL) | 0.5562 | 0.7129 | 0.7516 | 0.6886 |
| PSPNet (TL) | 0.6071 | 0.7704 | 0.7380 | 0.7301 |
| MSG-FN (1-shot) | 0.7236 | 0.8221 | 0.8471 | 0.8282 |
| MSG-FN (5-shot) | 0.7237 | 0.8225 | 0.8469 | 0.8282 |
Table 6.
Results of ablation experiments.
| Method | Precision | Recall | F1-score | IoU |
| W/o Res-FRN | 0.6925 | 0.8357 | 0.7269 | 0.6127 |
| W/o Multi-scale SGM | 0.8201 | 0.8654 | 0.8319 | 0.7337 |
| MSG-FN (ours) | 0.8400 | 0.8513 | 0.8353 | 0.7398 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



