
Submitted:
31 May 2023
Posted:
01 June 2023
You are already at the latest version
Abstract
This contribution shows the possibilities of a low-cost multipurpose data logger that was built around an Arduino Mega 2560 single board computer. To transform the Arduino Mega into such a data logger, a sensor shield was designed that contains an SD-card, real-time clock, and different kinds of connectors so that sensors can easily be attached to the device. The software considers a wide range of predefined sensors from which a user can choose. To assess the performance of such a device, short-term monitoring campaigns in relation to outdoor air quality, human activity in an office, motion of a journey on a bike, and exhaust gas monitoring of a diesel generator were realized. Besides the possibilities to apply the data logger in different kinds of applications, a method is proposed to assess the credibility of such a system. The assessment based on the various short-term campaigns showed that the system scores positively on most of the performance indicators, but that unexpected (black swan) events affect the assessment over the longer term. This makes the development of low-cost scientific instruments harder than expected. The stability and long-term performance of this type of design requires continuous evaluation and engineering correction.
Keywords:
Arduino
; data logger
; reliability
; monitoring
; sensors
; custom expansion shield
1. Introduction
A multi-purpose data logger is a device that collects data from various sensors over time. Typical parameters that can be monitored with these sensors are temperature, relative humidity, pressure, intensity of visible light, or the concentration of gaseous or particulate pollutants in air. Motion, orientation, and position of the device are also parameters often requested. Data logger instruments can be used in decision support systems [1] or in early warning systems [2]. Multi-purpose data loggers are commercially available (e.g., DataTaker, Novus FieldLogger, Campbell Scientifics) but they are rather expensive (> 1000 euro). This can be a problem when data loggers are used in harsh conditions [3,4] and a short live time of the equipment can be expected. For some of these situations, low-cost multipurpose data loggers would be a better alternative. An additional advantage is that such devices are also affordable to low-income countries. To make such applications possible, the data logger should withstand a tropical climate, high salinity and high solar irradiance, such as in Cuba.
Low-cost open-source hardware such as Arduino or Raspberry Pi has found its way into the scientific community for quite some time [5]. This can be seen in the many scientific publications that make use of this technology [6,7,8,9,10,11,12,13]. For example, they are used in agriculture [14,15,16] and livestock farming to monitor the irrigation of crops [17], the respiration rate of fruits and vegetables [18], or the emission of methane from animals [19,20]. They are also used to monitor energy production (e.g. solar energy [21,22]) or consumption. It is also widely used for indoor and outdoor air quality monitoring [23,24,25,26,27,28,29,30,31].
Some of the benefits of Arduino data loggers are that they are cheap, customizable, and energy efficient. In addition, they can easily be replaced when they are broken. However, the mentioned advantages are also a drawback [5]. A major problem of the Arduino platform is that the user must build the system by himself. Moreover, one has to write the proper software as well. Arduino platforms do not have specific interfaces to couple sensors. For that reason, it is necessary to include a data logger shield that allows an easy connection of sensors. Data logger shields for Arduino are available on the market (e.g., Adafruit data logger shield, Grove base shield V2.0 for Arduino). Besides the real-time clock and a memory card connector, such shields sometimes also include different kinds of connectors to attach sensors to the data logger. However, many Arduino data loggers do not allow an easy and fast connection or replacement of sensors, and an easy reconfiguration of the software. For that reason, we designed a sensor shield that can connect analog, I2C and UART sensors to the data logger using pre-existing connectors. Many people have already made software for Arduino data loggers public, but more general code that can be configured to cover a larger range of needs is harder to find. Therefore, appropriate software was developed that includes a large set of sensors and from which the user can select the sensors he needs. The versatility of the system will be illustrated with measuring campaigns related to outdoor air quality, human activity in an office, motion monitoring during a journey on a bike, and exhaust gas monitoring generated by a diesel generator. Besides the ability to collect data, one often questions how reliable measurements of low-cost devices are. Will the data logger fail at some point, how does one know that the software is flawless, or how does one know that the sensors are generating data from which conclusions can be drawn and decisions can be made? The practical use of low-cost data loggers is hampered by a lack of credibility and trust. This contribution explores how the credibility can be assessed.
2. Background
Before accepting the effectiveness of a certain technology, both rational arguments (credibility) and emotional arguments (trust) must be presented to demonstrate its proper functioning. For data loggers, this means that they should work as expected (in our case also in a tropical climate), they should protect their data, be widely used by others, and demonstrate positive experiences. The user may have perceived these positive experiences in the past, or he may have heard them from others. In addition, developers and manufacturers should be transparent about the performance and potential risks of their data loggers. This means that the believability in the proper working of data loggers is partly determined by technological features that fall in the sphere of control of the developers but that it is also a social construct that is determined by the community using that technology. The social aspect of believing in technology falls outside the scope of this contribution. It is important to keep in mind that technology is never perfect and there are always limitations and drawbacks, especially when using low-cost technology. Predictable errors due to known limitations are not a problem in themselves but the boundary conditions in which low-cost data loggers can be relied on must be known in advance. Therefore, technology has to be assessed by a series of performance indicators. These indicators are classified into 3 groups and are described in the following paragraphs. An alternative method is to identify design deficiencies by assessing the operation of a device for a large number of scenarios and describing what might go wrong for each scenario, as is done in failure mode and effects analysis (FMEA) [32,33].
2.1. Indicators at the level of the instrument
The Arduino-based highly customizable data logger must be designed in such a way that any kind of sensor from a predefined set of sensors can be connected to the data logger in an easy way and that the software can be configured by a user who has limited expertise in engineering without introducing errors in the system. The data logger must also withstand harsh conditions as the tropical climate of Cuba (hot, humid, airborne salinity, high solar irradiance), or a moderate marine climate as in Belgium where condensation on colder surfaces can occur. One of the applications in this contribution is the monitoring of pollutants in exhaust gases and this should also be considered as a harsh working condition. The development of such a system entails a continuous loop of learn, adapt, and refine the development processes to achieve better results (Plan-Do-Check-Act (PDCA)-cycle). Besides the realization of the goal and the absence of obvious design errors, the performance indicators in Table 1 must be fulfilled as well. These criteria describe the quality of the developer’s work and can be used as stopping criteria for the PDCA-cycle. For each indicator, the assessor compares the performance of the data logger against a predefined target. This evaluation can also be carried out with the four-eyes principle, meaning that the assessment of one assessor is controlled by a second independent person. If the data logger does not pass a test, the cause of the problem should be analysed and corrective actions can be proposed [34]. A next cycle in the PDCA-process is then needed.
2.2. Indicators at the level of sensors
Once the multipurpose data logger and its set of sensors have passed the tests of the developers as summarized in Table 1, the performance of the sensors can be assessed more in detail. There is a vast number of sensors available on the market in different price categories, but it is not always clear what sensor should be selected. For that reason, a set of performance indicators are needed to evaluate the sensor quality. Several standards exist that deal with the calibration of sensors [34]. They use a set of performance criteria as the ones summarized in Table 2 [43,44,45,46,47,48,49], although most evaluations focus on indicator 2.5. Although parameter 2.5 might be considered as the most important one, the other indicators should not be neglected. These assessments of the indicators are best performed by the user/assessor in collaboration with the developers because in some cases the system needs to be adapted to solve issues. It is recommended to retain records of original observations, derived data and sufficient information to establish an audit trail [50].
2.3. Indicators at the level of data
Once the measuring system is available and the reliability of sensors was determined, one can evaluate the quality of the collected data. The data collected by data loggers not only contain information about the absolute value of a certain parameter but also about the dynamics of how a parameter varies over time [54,55,56,57,58]. The performance indicators summarized in Table 3 can assess the reliability of the collected data. It should be remarked that the data quality can pass the assessment test while it is still less than the data quality obtained by the gold standard. Data quality depends on the expectations of the user/assessor. In this contribution, the assessment follows the principles of a satisficer point of view, prioritizing satisfactory or acceptable outcomes rather than seeking optimal or perfect solutions (maximizer point of view). When the data quality is good enough to perform a task or answer a question, the system will pass for indicator 3.5. In principle, any kind of user can perform this assessment without the assistance of the technology developer. Based on the data quality achieved, some classify sensors in different categories [51,59]. It should be noted that a credible monitoring device must pass all the indicators of the 3 different levels.
3. Materials and methods
To illustrate the flexibility of the multi-purpose data logger, several types of monitoring campaigns were organized. These data will also be used to assess the credibility of the multipurpose data logger. This section is organized according to the 3 levels that are described in the previous section.
3.1. Design of the low-cost data logger
System integration in engineering terms refers to the process of bringing together different subsystems into one working whole. There are different methods of integration such as horizontal integration, vertical integration, star integration, etc [64]. The method used in this research is the horizontal one where the software connects all and communicates with all subsystems and where one subsystem can be replaced by another one with similar functionality. This way of working increases the flexibility of the overall system.
Based on the previous experience of the developers [28,65,66], the Arduino Mega 2560 single board computer was used as the core of the multi-purpose data logger. To transform the single board computer to a data logger that can be adapted to the needs of the user, a custom-made expansion shield is needed. This shield (Figure 1) includes a real time clock (NXP Semiconductors, PCF8523), a micro-SD socket (Amphenol 10102166A812A), 2 analog-to-digital converters (ADS1115), a level shifter (TXS0108) to transform the signal in the range of 0-5 V into a signal of 0-3.3 V, and different types of JST PH and XH connectors to attach sensors to the data logger in an easy way. The connectors simplify the wiring between sensors and data logger. The shield also features a 5V 2A power supply (mezd71202a), a 3.3V 1A (1117 3.3) power supply, a current sensor (ACS712), several jumpers for voltage selection (5V/3.3V) to the different connectors and two LEDs for status indication. The shield provides voltage to the Arduino Mega 2560 through the Vin pin. The schematics of the shield and a photo of the front side are shown in Figure 1. The shield was designed with the open-source software KiCad and manufactured by JLCPCB (https://jlcpcb.com/).
The software is structured in such a way that the user can define the sensor type, the connector position on the shield to which it is connected, and the method with which the collected data must be processed within a sampling period (e.g., minimum value, maximum value, average, root mean square). The user configuration is done in the very first step in the flowchart shown in Figure 2. The rest of the flowchart is a generic algorithm. The sensor specific code is isolated from the main loop using functions. The design of the sensor shields and the software went through several PDCA-cycles before reaching the goal described in paragraph 2.1.
Depending on the type of measurement campaign, the data logger can be energized through a power socket of 110 VAC or 220 V AC using a power supply adapter. In case of a mobile monitoring campaign, the data logger can also be connected to a power bank (model EY-PB-18000) or a lead battery (12VDC/7Ah). Some power banks demand a current consumption above a certain threshold or they turn themselves off. Such power banks cannot be used with Arduino-based data loggers.
3.2. Selected sensors
Table 4 lists all the sensors that are included in the software. Different sensors were used for each of the 4 case studies. The user can define the sampling time in seconds and how the consecutive measurements within a sampling period are processed.
3.3. Collected data
The software automatically generates a CSV file in which the sensor measurements are stored. The monitoring campaigns result in data matrices with measurements arranged in rows and parameters arranged in columns. The first column entails the timestamp. The data structure is the same for all measurement campaigns except that the columns may contain different variables and the time between 2 consecutive measurements may be different. This maximizes the consideration of performance indicator 3.6. When an error occurs such as inability to access a sensor, RTC or SD-card, a message with timestamp is send to the serial screen and if this is possible also stored in the error log. The data structure of the error log and the formulation of the error messages are made as actionable as possible and follows a similar structure as the data file.
By adapting the configuration in the software, 4 different measuring campaigns were realized with the same data logger. Changing the configuration in the software only took a few minutes. The campaigns are merely illustrations to show the possibilities of the multipurpose data logger but they are also used to evaluate the performance indicators.
- Outdoor air quality: A measuring campaign was performed on the roof of a reference measuring station of the Flemish Environment Society (Vlaamse Milieu Maatschappij, VMM) in Antwerp, Belgium at station 42R801. The monitoring campaign was conducted from June 3 to 30, 2022. The monitoring system used a sampling time of two minutes;
- Human activity in an office: The activities of 3 employees working in the same office at the Antwerp Maritime Academy (AMA), Belgium was monitored from March 8 to 27, 2023. The system was placed on a table near a window. During the monitoring campaign, three workers were in the office from Monday to Friday, from 8:30 to 17:30 approximately. During this period, the employees switched the lighting and electric heating device on or off. The monitoring system used a sampling time of two minutes;
- Motion monitoring: This monitoring campaign was performed March 17, 2023. The parameters shown in Table 4 were recorded in the afternoon when the cyclist rode from AMA to home. In this experiment, the monitoring system was placed in a basket installed on the rudder of a bike. The monitoring system used a sampling time of one second;
- Exhaust gas monitoring: Exhaust gas monitoring of a diesel generator SD6500SS SILENT (model 186FA) with one cylinder was performed during small periods of time. Three types of experiments were performed with a duration of 15 minutes each and with a sampling time of two seconds. More information about the experiments can be found in Table 5. Figure 3 shows the setup used. A PTFE tube of 4 mm inner diameter (outer diameter: 6 mm) was placed inside the tailpipe of the generator. This pipe was connected to a reservoir that collected the condensation moisture. A HEPA-filter inside a Swagelok stainless steel tee-type particulate filter (SS-6TF-MM-05) was used to remove the soot before the exhaust gas reached the sensors. Screwable sensors in a stainless-steel Swagelok tube fitting with female branch (diameter sensor of 1/4 inch: Swagelok SS-8F-K4-2; diameter sensor of 3/4 inch: SS-12-T) and flow through sensors for CO2 and O2 were used to connect the sensors with the tube. The sensor types used in this campaign can be found in Table 4. A pump sucked the exhaust gases through the tube, condensation reservoir, and the filters.
4. Results
4.1. Outdoor air quality
The data logger and the selected sensors appeared to work well in the moderate marine climate of Belgium during an outdoor air monitoring campaign on the roof of a reference station of VMM. Also for a measuring campaign in a tropical climate as in Cuba, the system appeared to perform well. [67]. During short-term tests, the system passes the performance indicators 1.1 to 1.6. However, short-term experiments in real-world conditions resulted in insufficient information to evaluate indicator 1.5. During longer experiments, the data logger seemed to malfunction at some moments during the Belgian autumn and winter period. At one occasion, the connection with the RTC was lost and no timestamps were recorded. At another moment, data was sent to the serial screen put were not stored on the SD-card. When the device was taken to the office, both problems appeared to be solved by itself. Most probably, the formation of condensation during sudden meteorological changes was the cause of the problem and this cannot be solved by a better housing. The problem was tackled by spraying varnish on the surface but additional long-term tests during the autumn and winter period of next year are needed to evaluate this solution. This means that the evaluation of some indicators is affected by the occurrence of several unforeseen scenarios. Such situations are known as black swan events (i.e., high-impact events that are difficult to predict under normal circumstances) [68]. For these events to take place, testing should be carried out over extended periods of time under different kinds of situations but even then, it is not sure that such events would occur during the test phase. Black swan events have a larger impact on the reliability that users attribute to the data logger than predictable errors resulting from the shortcomings of low-cost technology. The occurrence of hard to predict events or events that are not supposed to happen makes that it is not possible to assess the reliability of the data logger during the designing stage of a device. A temporal absence of black swan events might lead to overconfidence by the developers.
The variations of most of the environmental parameters as registered during the measuring campaigns fitted within the range that the sensor can measure. When the system was working properly, no missing data in the time series were observed. Moreover, the sensors appear to be withstanding the outdoor conditions to which they are exposed to and seem to be sufficiently robust (indicator 2.1). However, the TERA-sensor for particulate material did not operate correctly during the measurement campaign due to a fracture in the housing of the sensor. The response times corresponded to those provided by the manufacturers (indicator 2.2). The BME280, AM2315 and Alphasense sensors were calibrated using a high-end calibration method at VITO, Belgium [67]. The Sensirion SCD30 CO2 sensor was calibrated using a low-cost method [29]. For all sensors, laboratory calibration tests have shown a strong linear relationship between sensor signal and corresponding physical values. This means that the sensors pass the short-term tests related to indicators 2.3 to 2.5 but long-term tests are needed to get an insight in their reliability on a longer time scale.
Researchers use different kinds of algorithms to calibrate low-cost sensors and some of them rely on co-location experiments at reference stations [69,70,71]. The results of such an evaluation are seen in Figure 4. In our study, the relationship between the sensor signal (i.e., a quantity generated by a digital sensor, a voltage generated by an analog sensor) and the corresponding value provided by the VMM station was explored (see Figure 4). High coefficients of determination were obtained for temperature and relative humidity reported by the AM2315 sensor (0.9391 and 0.926 respectively). For O3 and CO, the correlation coefficient is less (0.5838 and 0.5411 respectively). A similar relationship was studied in a recent investigation for SO2 but for that pollutant the concentrations at the measuring location were below or close to the detection limit of the sensor [67]. Due to the lower coefficients of determination, the simple linear calibration introduces an uncertainty in the calculated concentrations. However, the credibility of the monitoring system is not only determined by the similarity between sensor data and reference data as shown in Figure 4 but by the entire system as suggested by the previous paragraphs.
The trends in Figure 5a show the overview of the outdoor air measuring campaign of about 1 month in Antwerp, Belgium. The detail in Figure 5b shows the occurrence of 2 temperature peaks over a period of two consecutive working days and a valley during the night in between these days. The RH shows peaks that correspond with the temperature valleys. This illustrates that the trends in Figure 5 are day/night cycles. The recorded ozone peaks are closely related to the temperature peaks, a behavior that was also observed in other studies [72,73]. NO2 and CO2 peaks match with the relative humidity peaks and temperature valleys. In addition, some SO2 peaks match with CO peaks. The deviations from the linear relationships shown in Figure 4 suggest that the absolute amount is associated with a relative high uncertainty but Figure 5 suggests that meaningful information can be extracted from the trends.
4.2. Human activity in an office
The same data logger and the same software was used to setup a monitoring campaign inside an office. The sensors were selected to monitor human presence and human activity in the office and to monitor the effect of the ambient conditions on wellbeing. This means that besides temperature and relative humidity also CO2, visible light (from sunlight and lighting), motion (when a person moves in the room), sound and air speed (draft inside the office) was monitored. The data logger and sensors selected for this study appeared to work without conflicts. This suggests that the system passes indicator 1.1 and 1.2. However, during the first days of the campaign a bug was detected in the software, as no data was recorded from midnight to 6:00 am. This moment occurred at the blue arrow in Figure 6. The problem was solved by correcting the algorithm. Another issue was a gap in the data between Wednesday, 22 at 16:00 to Thursday, 23 at 13:40, which was preceded by a measurement with an erroneous timestamp "165/165/2165" (see blue arrow in Figure 6). This error can be caused by a power loss of the RTC battery, or synchronization troubles between the RTC module and the Arduino. To solve this issue, additional code was introduced in the loop that: a) checks if the RTC is working properly, b) that estimates the current time from the previous time measurement and the time that already passed within the current sampling period and writes that time to the RTC, and c) restart the Arduino to clean all the registers. In addition, the variables in which the RTC readings are stored were changed from integer to long. Since then, the instrument was working without intermissions (indicator 1.3). This problem showed again that assessing the reliability of a low-cost data logger requires real-world tests of longer time spans and that unforeseen scenarios affect the assessment. However, there are no criteria that clearly delineate the concept of ‘long periods’ in indicator 1.5. The data logger was not enclosed in a housing for this experiment and indicator 1.6 could not be evaluated.
The sensors for visible light, sound, air speed and human motion detects human activity in different ways. For these sensors, the indicators of Table 2 were harder to evaluate because we did not have the proper equipment to calibrate this kind of sensors (i.e., indicator 2.4). All sensors involved in this application were calibrated by the manufacturer and/or calibration information is provided by the manufacturer (see Table 4). However, by changing the conditions in the room in a controlled way (e.g., switching on the light, switching on the heater), it was possible to observe the behavior of the sensors. The air speed values provided by EE650 sensor that gives an insight in air draught were below the detection limit (i.e. 0.1 m/s), which means that the collected data were not reliable (i.e., indicator 3.1). All other sensors recorded values above their detection limits. The sensors did not endure signal saturation (i.e., indicator 3.1). The SparkFun Sound Detector indicated only the occurrence of sound above a certain threshold value, showing values of 0 or 100, “0” means no sound detected and “100” means sound detected. The default configuration for this module is 40 dB in gain terms. The binary response was not ideal for analyzing trends of sound intensity. The motion sensor was included in the monitoring system on March 14 and was able to detect moving objects in the room, showing values of 0 or 1 where “0” means no movement detected and “1” means movement detected. Also here, a sliding scale might have given more information.
The trends in Figure 6a show the dynamics of the measured parameters for several days. Figure 6b shows a detail of a single workday and how some of the monitored parameters are related. The temperature fluctuated so strong because the heating device was switched on at the beginning of the workday and switched off at the end of the day. During the weekend, the heating device was not used. Relative humidity was more stable, but increases were noticed at rainy days. Wet clothing introduced moisture in the room. The CO2 concentration raised when persons were present in the room. During the absence of persons in weekends, no CO2 peaks were observed. The reported CO2 concentrations can be used as an indicator to evaluate the indoor air quality (IAQ), air exchange rate, and the ventilation efficiency in the office [74,75]. Also, visible light, sound and motion gave an insight in human activity in the room. In what follows, detailed information is given for the analyzed parameters. There is a clear relationship between human presence/activity and the change in the parameters of temperature, CO2, lighting and motion. Sound contained less information about human presence than expected and air speed sensor was not able to register draught. The trends provided by the sensors allowed relevant information to be drawn from the raw data, so that the system passes for indicators 3.1 to 3.5.
- T, RH and CO2: While the relative humidity is more or less stable, the temperature was lowest in the morning and increased at around 9:00 when workers switched on the heating device. The temperature slowly increased during the course of the day and started to decrease at around 17:30 when the heating system was turned off. The CO2 concentration showed a similar behavior and its variation may be related to the number of people frequenting the office on that day. When 3 persons are working in the office, the CO2 concentration peaks at around 1000 – 1200 ppm; with 2 persons in the room the peaks reached 800 – 1000 ppm. If the concentration of CO2 exceeds the 900 ppm threshold, an efficient ventilation system and the presence of air purification devices are recommended. This was especially the case during the covid-19 period;
- Light: Light intensity increases as dawn rises. The light sensor clearly sees the sun light that enters the room through the window and this resulted in diurnal cycles (i.e., the large bumps). For a short period of time, the sunlight is also able to shine directly in the room, resulting in a high peak in the morning. In addition, the sensors also registered when the lighting was switched on in the morning, showing a sudden increase at around 8:30. After that, it remained constant. At around 12:30 the light intensity suddenly decreased because the office light was turned off during lunch time. Sometime later, the light was turned on again. A decrease in light intensity was also recorded around 17:30 pm, when the workday ends. The intensity decreased as evening approached. This means that the light sensor gives additional information about human presence in the office;
- Sound: The sound peaks were recorded during working hours at random moments. This means that either the sensor is not sensitive enough to pick up the low sound levels, or that the employees in the room were working in silence. The sound peaks were related to human presence but in this working context it did not give much meaningful information about human context. For example, Figure 6b is a working day with human activity (i.e., see temperature, CO2, visible light, human motion) but no sound peaks were registered that day;
- Motion: The sensor recorded human motion during working hours and is related to the presence of people in the office. No motion was recorded at night, after the working hours, on weekends and during lunch time (see Figure 6b). The valley for light during lunch time in Figure 6b is larger than for motion, which may be attributed to the fact that the office lighting was turned on later. During the periods of human presence, the sensor suggested the absence of any motion, meaning that at regular occasions the employees were sitting still or not moving within the detection angle and distance;
4.3. Motion monitoring during a journey with a bike
The same data logger was connected to another set of sensors to monitor position and orientation of a journey on a bike. The data logger and sensors selected for this campaign worked without conflict. The software appeared to be error-free. This campaign did not operate for a long period (about 30 minutes), but the instrument worked as expected in dry outdoor conditions. In order to have optimal GPS readings, no specific housing was used in the first journey (Figure 7) but it also worked properly in a closed plastic housing during the second journey (not shown). The instrument appears to pass all performance indicators 1.1 to 1.6.
During the journey, the monitoring system withstood the vibrations and possible shocks caused by the movements of the bike (indicator 1.5). A sampling time of 1 s was used to register the variations during the campaign. The vibration and orientation sensors registered several changes in the measured parameters when the cyclist encountered cobblestone roads, potholes, etc. The quality of the sensors was evaluated with the data from the measurement campaigns where documented events should cause changes in the measured signals. However, indicators 2.3 to 2.5 remained hard to be evaluated from the collected data. Concerning the calibration of the sensors, this was already done by the manufacturer and/or the manufacturer provided calibration information.
In Figure 7, the results of the journey are visualized as a time series. The same results are also shown in Figure 8 on a map. The GPS data couples both representations of the same data. At first glance, the signals show strong fluctuations and it is not clear whether the high frequency variations contain meaningful information or that they should be considered as noise. Since the sampling time is small, the minimum, maximum, average and root mean square was almost identical to the raw data. Therefore, it was decided to evaluate the sensors using the raw data only. The time series contained at regular occasions spikes of 1 data point with unrealistic values. It was decided to remove such spikes by applying a centered moving median with a window size of 5 points. This means that the system did not pass entirely indicator 3.3, but that the problem could be solved during post processing. Finally, no data gaps were observed during the measuring campaigns for vibration and orientation sensors, except for some positions without GPS measurements (see zones without red dots in Figure 8). It was not clear if this behavior is related to the response time of the sensor in relation to the fast sampling time, or to the surroundings that blocked the GPS satellite signal.
The orientation sensor entails a three-axis accelerometer, gyroscope, and compass and is able to describe the orientation or rotation of an object in a three-dimensional space through the angles roll, pitch and yaw [76,77]. The gyroscope measures the angular velocity or rotation rate of an object around an axis without fixed reference point. The magnetometer measures the strength and direction of the terrestrial magnetic field and gives an insight in the absolute orientation. All these parameters are included in the multipurpose data logger and can be used to monitor the motion of for example submarines [78], ships, or airplanes. To understand the meaningfulness of the orientation and vibration sensors, the relationship between the events (see numbered rectangles in Figure 7) and the obvious irregularities in the road that were encountered during the journey (see Figure 8) was studied. The GPS coordinates from the irregularities were used to label the moments in the time series. These moments correspond with peaks and valleys in the time series and thus resulting in observable signal changes.
Whether the collected data contains useful information about the motion and orientation of the cyclist, a more detailed analysis was made of the sensor measurements. For the sake of simplicity, gyroscope and magnetometer information are shown in Figure 7 but not discussed because the orientation obtained from their measurements (expressed in Euler angles, see Figure 9) is of greater importance. The list below describes the behavior of the sensor measurements installed on the bicycle. The trends in Figure 7 contain meaningful information about the motion of the bicycle. This means that motion monitoring can provide contextual data that can be useful for, for example, indoor air quality monitoring campaigns on board of ships where pollution peaks might be explained by sudden changes in motion [79].
- Longitudinal or forward direction: During the journey, the Acc_X plot in Figure 7 (i.e., the acceleration in the forward direction as shown in Figure 9) is most of the time close to zero because the cyclist moved at a more or less constant speed or he was standing still (e.g., at a traffic light). Valleys are observed when he slows down; peaks are caused by an increase in speed. During a traffic light within the period of event 4, a negative peak (brake) is followed by positive peak (pull). Trends in roll (i.e., rotation along the forward direction) varied around 0° because the bike is oriented vertically while riding. At some moments, negative peaks in roll are observed, which indicated an inclination of the bicycle to the left with respect to the vertical plane (Figure 9). Conversely, positive peaks indicated the moments when the cyclist was inclined to the right. GPS coordinates confirm that such peaks correspond with moments that turns were taken or that the cyclist was standing still and stood on his left foot. The 6 events in Figure 8 did not have a major impact on the forward direction;
- Lateral or sideways direction: The accelerometer values along the Y-axis (Acc_Y in Figure 7; see Figure 9 for the orientation) shows the occurrence of small peaks and valleys around a zero baseline. When a bicycle leans into a turn, the cyclist endures a lateral force and this results in spikes in Acc_Y. The scale of the vertical axis of Acc_Y is smaller than that of Acc_X in Figure 7 and this gives the illusion that there are more irregularities in the sideways direction. These variations are related to level changes on the road that the cyclist travels and turns. During the experiment, the pitch values fluctuated around 0° because the journey was mostly flat. The negative and positive peaks are related to facing a downward slope at the departure of the journey, or bumps and potholes in the road. The standard deviation of the pitch reflects the different kinds of surface roughness of the road (Figure 8). The irregularities of events 1, 3, 4, 5 and 6 resulted in peaks in the pitch;
- Vertical direction: The vertical direction in the Z-axis is monitored with the accelerometer RSX-UM7 and with the vibration sensor VS-BV203-B. Figure 10 shows the behavior of both sensors and the response to the 6 events. Both sensors recorded a fluctuating signal with high standard deviation when the cyclist was riding on cobblestone roads (events 1 and 4 in Figure 8). Also, an increase of the standard deviation of the vibrations was observed when the cyclist was riding on a brick paved bike path (event 2), impacting a speed bump in the road (event 3), crossed tram rails (event 5) or a pothole (event 6). A comparison between both sensors suggests that the vibration sensor VS-BV203-B is more sensitive resulting in a more pronounced signal for the 6 events (Figure 10). The orientation sensor RSX-UM7 improves the identification of the events by combining several parameters such as the yaw (Figure 10a). In addition, the RSX-UM7 is capable of providing all the information required for the implementation of an inertial navigation system (INS). This additional information of position and velocity can compensate small gaps in the GPS signal. The yaw (i.e., angle measured relative to the earth's magnetic north) changes each time the cyclist turns and maintains the direction in which he turned. This is seen as a step in Figure 10a. When the cyclist rides around a pothole and returns to his original course, a spike is produced (Figure 10a). This behavior could be observed within events 1, 3 and 5 in Figure 10a. Changes in direction as observed in the yaw are accompanied by a change in roll. This is a common occurrence in the movement of a bicycle, where the cyclist leans slightly towards the side when he intends to turn.
4.4. Exhaust gas monitoring
For this experiment, the sensors coupled to the data logger were connected to an exhaust gas extraction setup (see Figure 3). To avoid problems with the sensors, the extraction setup removed soot and condensation when the gas was cooling down. The blackening of the second filter gave an indication when soot penetrated through the first filter. Linking the two systems worked well for periods less than 10 minutes. Also, for this application, the setup passed criteria 1.1 up to 1.5 for short-term experiments. However, one might ask how to remove condensation and soot for longer periods while the system autonomously monitors exhaust gases. A housing was not needed at this design stage (indicator 1.6).
The short experiments did not have sufficient information to assess indicator 2.1. By changing the conditions of the experiments in a controlled way, it was possible to evaluate the response time of the sensors. The sensors responded sufficiently fast to detect all changes (see Figure 11). Therefore, the data logger passed indicator 2.2. Indicators 2.3 to 2.5 could not be evaluated because the p, T, RH, CO2 and O2 sensors were not calibrated by ourselves. However, all sensors were calibrated by the manufacturer and/or the calibration information was provided by the manufacturers. The values recorded in this application were above the detection limit of the sensors. The SprintIR-WF-20 CO2 sensor measures CO2 concentration up to 20% and this appeared to be too low at certain moments (indicator 3.1). There were no missing data in the time series (indicator 3.4). Non-dispersive infrared (NDIR) based sensors analyse gasses by measuring the absorption of a light beam with a specific wavelength. The law of Lambert-Beer gives the relationship between extent of absorbed light and the number of gas molecules in the light beam. However, the concentration of for example CO2 in air also depends on the atmospheric pressure [80]. The exhaust gas pressure inside the tube is also affected by the pump in the gas extraction setup and this must be considered when calculating the concentration of the gas. The formulas needed to calculate the CO2 concentration are mentioned in the data sheet of the sensor [81]. Therefore, the concentration recorded by the sensor must be corrected using equation 1. Depending on the CO2 concentration level, the compensation factor Y is calculated by either equation 2 or 3. Y is calculated using equation 2 when the recorded concentration cr is smaller or equal than 1500 ppm. If cr > 1500 ppm, equation 3 is used to calculate Y.
where:
- ca is the adjusted CO2 concentration expressed in ppm;
- cr is the concentration recorded by the sensor expressed in ppm;
- Y is the compensation factor;
- P is the pressure in the gas extraction tube expressed in mbar and measured with the Atlas Scientific sensor.
The trend in Figure 11 gives an insight how the chemical composition of the exhaust gas emitted by the diesel generator varied over time during the 3 consecutive experiments. This means that a low-cost monitoring system can be used to collect meaningful information about exhaust gas emission:
- Experiment (a): At the beginning of the first experiment (see the blue rectangle at the left side in Figure 11), the generator was off and the sensors showed values that are characteristic for the ambient conditions of the site: approximately 1300 mbar pressure, 13 °C temperature, 25% relative humidity, 7000 ppm CO2 and 19 % O2. The ambient CO2 concentration is clearly too much for ambient conditions but the sensor is optimized to measure high concentrations so the measurement of lower concentrations is less accurate. It is also possible that the CO2 that was generated by the generator during preliminary tests penetrated the room by diffusion. A few minutes later, the generator was started. Since the pump of the extraction setup remained off during the entire course of the experiment, the pressure remained constant. The exhaust gas diffused across the tube and reached the sensors. The relative humidity and CO2 concentration increased up to 62 % and 75000 ppm respectively, while O2 dropped by 2 %. These observations fit with the burning process of fuel where CO2 and H2O are produced, O2 is consumed and heat is released. In this experiment, 3 CO2 peaks are observed because the generator was turned on and off 3 times. Since the exhaust gas inside the tube is replenished through a slow diffusion process, the width of the peaks is larger than the ones in experiment (b) and (c). Also, the temperature of the exhaust gas inside the sampling tube increased and decreased but is buffered by the heating and cooling of the material from which the tail pipe is made. Consequently, the temperature peaks are delayed in comparison with the CO2 peaks;
- Experiment (b): During the transition between experiment (a) and (b) the generator was off and the pump in the extraction setup was switched on for the entire experiment. During that period, the temperature and the pressure slowly decreased over time following an exponentially decaying function. The pressure only reached a stable value at the end of experiment (b) of about 1100 mbar. When the generator was switched on for the first time (see the blue rectangle in the middle of Figure 11), the CO2 concentration raised up and reached 60 000 ppm. The temperature raised with a delay. The temperature delay was observed in the 3 experiments. The same behaviour as in experiment (a) was observed: temperature and CO2 increase while O2 decreased by 4 %. The relative humidity remained stable. As in the previous experiment, the generator was turned on and off 3 times and this resulted in 3 CO2 peaks thar are sharper than the ones in the previous experiment;
- Experiment (c): The pump was deactivated during the transition between experiment (b) and (c) while the generator was still running. Therefore, the pressure increased and reached the pressure of experiment (a), which was around 1300 mbar. Experiment (c) started by switching on the pump again and increasing the load by coupling 3 electric heaters of 15 kW in total to the electric generator. From that point onwards, the pressure started to drop down to 1100 mbar, the CO2 concentration raised, and the oxygen concentration dropped. Also, the temperature increased while the relative humidity fluctuated around a 52 %. The load was activated and deactivated 3 times while the generator remained on. As a consequence, the sudden disconnection of the load increased the angular velocity of the generator. This resulted in 3 CO2 peaks in the blue rectangle at the right in Figure 11. The first CO2 peak is lower that the next 2 peaks because the load was only connected for a short period. When the load was applied for a longer period, the CO2 concentration started to increase and reached the saturation point of the sensor. The experiment was stopped before that point was reached.
5. Conclusions
This contribution showed that the same multipurpose data logger can be used for different kinds of monitoring campaigns. In addition, the performance of the data logger was assessed within a standardized framework using a set of predefined key performance indicators grouped in 3 levels: (1) the instrument, (2) the sensors, and (3) the data. The sensors were mainly evaluated on the meaningfulness of the measurements. What is striking is that many publications focus on the comparison of low-cost sensors with reference measurements while most of the other indicators described in this contribution receive little attention.
For outdoor air quality monitoring, the low-cost instrument was affected by meteorological conditions in Belgium during autumn and winter resulting in a loss of data and unexpected stops. Black swan events also happened in the human activity monitoring in the office, but here it was caused by a bug in the software that went undetected during the development stage. Motion monitoring evaluation did not result in problems during the short-term experiments but with a sampling period of 1 s one can wonder what will happen when monitoring campaigns of weeks are needed. The most important problem during the exhaust gas monitoring campaign was to design an adequate setup that makes it possible to operate the sensors in an optimal and safe way.
In almost of the presented campaigns, black swan events occurred and these events affected the assessment of the reliability of the data logger. Given the regular occurrence of unexpected events, it is hard to believe we are the only ones undergoing black swan events when developing low-cost data logger systems. As a result, short-term evaluations are not a good estimation for long-term reliability of low-cost scientific instruments. The occurrence of unexpected events or events that are not supposed to happen, makes the development of a low-cost multipurpose data logger harder than expected. Black swan events are only unexpected when they occur for the first time. As the evaluator encounters more of these events, he can build a growing database of scenarios that allows him to put the prototype under stress in a more dedicated way and see how it will react to all these stressors. This modus operandi tends more towards failure mode and effects analysis (FMEA) and test-driven design. When users report black swan events to the evaluator, the social aspect of believing in technology is not entirely outside the sphere of control of the developers/evaluators anymore.
Author Contributions
E.H.R.: Design of the low-cost data logger and manuscript preparation. R.A.G.R.: Data processing and analysis of results obtained in monitoring campaigns and manuscript preparation. O.S.: Research conception and design, preparation, review and approval of the final version of the manuscript. A.M.L.: Design of the low-cost data logger, review and approval of the final version of the manuscript. L.H.S.: Research conception and design, review and approval of the final version of the manuscript. D.A.S.: Review and approval of the final version of the manuscript. T.J.: Research conception and design, review and approval of the final version of the manuscript. W.J.: Research conception and design, review and approval of the final version of the manuscript. All authors have read and agreed to the published version of the manuscript.
Funding
The present work was supported by the VLIR-UOS Program as a South Initiative Project SI-2019 nr. CU2019SIN242B124 “AIR@PORT: Low-cost decision support system to evaluate the impact of ships on the air quality in the port city Cienfuegos”. Additional financial support was given by the common Global Minds project BE2017GMHVLHC106 of all Flemish Universities of Applied Sciences and Arts.
Data Availability Statement
All data used in this study are available upon request.
Acknowledgments
The authors thank VLIR-UOS for their financial support of the South Initiative Project SI-2019 nr. CU2019SIN242B124 “AIR@PORT: Low-cost decision support system to evaluate the impact of ships on the air quality in the port city Cienfuegos”. They are also grateful for the additional support by the Global Minds project BE2017GMHVLHC106 “A low cost measuring device to directly monitor exhaust gases generated by fuel engines: Design, development, validation”. The researchers are grateful to the VMM for allowing them to measure near one of their monitoring stations.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Schalm, O.; Cabal, A.; Anaf, W.; Leyva Pernia, D.; Callier, J.; Ortega, N. A Decision Support System for Preventive Conservation: From Measurements towards Decision Making. Eur. Phys. J. Plus 2019, 134, 74. https://doi.org/10.1140/epjp/i2019-12441-5. [CrossRef]
- Aji Purnomo, F.; Maulana Yoeseph, N.; Wijang Abisatya, G. Landslide Early Warning System Based on Arduino with Soil Movement and Humidity Sensors. J. Phys.: Conf. Ser. 2019, 1153, 012034. https://doi.org/10.1088/1742-6596/1153/1/012034. [CrossRef]
- Misra, P.; Kanhere, S.; Ostry, D.; Jha, S. Safety Assurance and Rescue Communication Systems in High-Stress Environments: A Mining Case Study. IEEE Commun. Mag. 2010, 48, 66–73. https://doi.org/10.1109/MCOM.2010.5439078. [CrossRef]
- Shahid, N.; Naqvi, I.H.; Qaisar, S.B. Characteristics and Classification of Outlier Detection Techniques for Wireless Sensor Networks in Harsh Environments: A Survey. Artif. Intell. Rev. 2015, 43, 193–228. https://doi.org/10.1007/s10462-012-9370-y. [CrossRef]
- Kondaveeti, H.K.; Kumaravelu, N.K.; Vanambathina, S.D.; Mathe, S.E.; Vappangi, S. A Systematic Literature Review on Prototyping with Arduino: Applications, Challenges, Advantages, and Limitations. Computer Science Review 2021, 40, 100364. https://doi.org/10.1016/j.cosrev.2021.100364. [CrossRef]
- Ferdoush, S.; Li, X. Wireless Sensor Network System Design Using Raspberry Pi and Arduino for Environmental Monitoring Applications. Procedia Computer Science 2014, 34, 103–110. https://doi.org/10.1016/j.procs.2014.07.059. [CrossRef]
- Costa, D.; Duran-Faundez, C. Open-Source Electronics Platforms as Enabling Technologies for Smart Cities: Recent Developments and Perspectives. Electronics 2018, 7, 404. https://doi.org/10.3390/electronics7120404. [CrossRef]
- Rosenberger, J.; Guo, Z.; Coffman, A.; Agdas, D.; Barooah, P. An Open-Source Platform for Indoor Environment Monitoring with Participatory Comfort Sensing. Sensors 2022, 23, 364. https://doi.org/10.3390/s23010364. [CrossRef]
- Iribarren Anacona, P.; Luján, J.P.; Azócar, G.; Mazzorana, B.; Medina, K.; Durán, G.; Rojas, I.; Loarte, E. Arduino Data Loggers: A Helping Hand in Physical Geography. Geogr. J . 2022, geoj.12480. https://doi.org/10.1111/geoj.12480. [CrossRef]
- Wickert, A.D.; Sandell, C.T.; Schulz, B.; Ng, G.-H.C. Open-Source Arduino-Derived Data Loggers Designed for Field Research; Catchment hydrology/Instruments and observation techniques, 2018;
- Gandra, M.; Seabra, R.; Lima, F.P. A Low-Cost, Versatile Data Logging System for Ecological Applications. Limnol. Oceanogr.: Methods 2015, 13. https://doi.org/10.1002/lom3.10012. [CrossRef]
- Beddows, P.A.; Mallon, E.K. Cave Pearl Data Logger: A Flexible Arduino-Based Logging Platform for Long-Term Monitoring in Harsh Environments. Sensors 2018, 18, 530. https://doi.org/10.3390/s18020530. [CrossRef]
- Lockridge, G.; Dzwonkowski, B.; Nelson, R.; Powers, S. Development of a Low-Cost Arduino-Based Sonde for Coastal Applications. Sensors 2016, 16, 528. https://doi.org/10.3390/s16040528. [CrossRef]
- Gines, G.A.; Bea, J.G.; Palaoag, T.D. Characterization of Soil Moisture Level for Rice and Maize Crops Using GSM Shield and Arduino Microcontroller. IOP Conf. Ser.: Mater. Sci. Eng. 2018, 325, 012019. https://doi.org/10.1088/1757-899X/325/1/012019. [CrossRef]
- Rodríguez-Juárez, P.; Júnez-Ferreira, H.; González Trinidad, J.; Zavala, M.; Burnes-Rudecino, S.; Bautista-Capetillo, C. Automated Laboratory Infiltrometer to Estimate Saturated Hydraulic Conductivity Using an Arduino Microcontroller Board. Water 2018, 10, 1867. https://doi.org/10.3390/w10121867. [CrossRef]
- Ngo, H.Q.T.; Nguyen, T.P.; Nguyen, H. Research on a Low-Cost, Open-Source, and Remote Monitoring Data Collector to Predict Livestock’s Habits Based on Location and Auditory Information: A Case Study from Vietnam. Agriculture 2020, 10, 180. https://doi.org/10.3390/agriculture10050180. [CrossRef]
- Spinelli, G.M.; Gottesman, Z.L.; Deenik, J. A Low-Cost Arduino-Based Datalogger with Cellular Modem and FTP Communication for Irrigation Water Use Monitoring to Enable Access to CropManage. HardwareX 2019, 6, e00066. https://doi.org/10.1016/j.ohx.2019.e00066. [CrossRef]
- González Buesa, J.; Salvador, M.L. An Arduino-Based Low Cost Device for the Measurement of the Respiration Rates of Fruits and Vegetables. Comput. Electron. Agric. 2019, 162, 14–20. https://doi.org/10.1016/j.compag.2019.03.029. [CrossRef]
- Yang, S.; Liu, Y.; Wu, N.; Zhang, Y.; Svoronos, S.; Pullammanappallil, P. Low-Cost, Arduino-Based, Portable Device for Measurement of Methane Composition in Biogas. Renew. Energ. 2019, 138, 224–229. https://doi.org/10.1016/j.renene.2019.01.083. [CrossRef]
- Rodríguez-Pérez, M.L.; Mendieta-Pino, C.A.; Brito-Espino, S.; Ramos-Martín, A. Climate Change Mitigation Tool Implemented through an Integrated and Resilient System to Measure and Monitor Operating Variables, Applied to Natural Wastewater Treatment Systems (NTSW) in Livestock Farms. Water 2022, 14, 2917. https://doi.org/10.3390/w14182917. [CrossRef]
- Fuentes, M.; Vivar, M.; Burgos, J.M.; Aguilera, J.; Vacas, J.A. Design of an Accurate, Low-Cost Autonomous Data Logger for PV System Monitoring Using ArduinoTM That Complies with IEC Standards. Sol. Energy Mater Sol. Cells. 2014, 130, 529–543. https://doi.org/10.1016/j.solmat.2014.08.008. [CrossRef]
- Vinoth Kumar, V.; Sasikala, G. Arduino Based Smart Solar Photovoltaic Remote Monitoring System. MJS 2022, 41, 58–62. https://doi.org/10.22452/mjs.vol41no3.8. [CrossRef]
- Karami, M.; McMorrow, G.V.; Wang, L. Continuous Monitoring of Indoor Environmental Quality Using an Arduino-Based Data Acquisition System. J. Build. Eng. 2018, 19, 412–419. https://doi.org/10.1016/j.jobe.2018.05.014. [CrossRef]
- Silva, H.E.; Coelho, G.B.A.; Henriques, F.M.A. Climate Monitoring in World Heritage List Buildings with Low-Cost Data Loggers: The Case of the Jerónimos Monastery in Lisbon (Portugal). J. Build. Eng. 2020, 28, 101029. https://doi.org/10.1016/j.jobe.2019.101029. [CrossRef]
- Carre, A.; Williamson, T. Design and Validation of a Low Cost Indoor Environment Quality Data Logger. Energy Build. 2018, 158, 1751–1761. https://doi.org/10.1016/j.enbuild.2017.11.051. [CrossRef]
- Pereira, P.F.; Ramos, N.M.M. Low-Cost Arduino-Based Temperature, Relative Humidity and CO2 Sensors - An Assessment of Their Suitability for Indoor Built Environments. J. Build. Eng. 2022, 60, 105151. https://doi.org/10.1016/j.jobe.2022.105151. [CrossRef]
- Ali, A.S.; Zanzinger, Z.; Debose, D.; Stephens, B. Open Source Building Science Sensors (OSBSS): A Low-Cost Arduino-Based Platform for Long-Term Indoor Environmental Data Collection. Build. Environ. 2016, 100, 114–126. https://doi.org/10.1016/j.buildenv.2016.02.010. [CrossRef]
- Martinez, A.; Hernandez-Rodríguez, E.; Hernandez, L.; González-Rivero, R.A.; Alejo-Sánchez, D.; Schalm, O. Design of a Low-Cost Portable System for the Measurement of Variables Associated with Air Quality. IEEE Embed. Syst. 2023, 15, 105–108. https://doi.org/10.1109/LES.2022.3196543. [CrossRef]
- González Rivero, R.A.; Morera Hernández, L.E.; Schalm, O.; Hernández Rodríguez, E.; Alejo Sánchez, D.; Morales Pérez, M.C.; Nuñez Caraballo, V.; Jacobs, W.; Martinez Laguardia, A. A Low-Cost Calibration Method for Temperature, Relative Humidity, and Carbon Dioxide Sensors Used in Air Quality Monitoring Systems. Atmosphere 2023, 14, 191. https://doi.org/10.3390/atmos14020191. [CrossRef]
- Sá, J.P.; Alvim-Ferraz, M.C.M.; Martins, F.G.; Sousa, S.I.V. Application of the Low-Cost Sensing Technology for Indoor Air Quality Monitoring: A Review. Environ. Technol. Innov. 2022, 28, 2–27. https://doi.org/10.1016/j.eti.2022.102551. [CrossRef]
- Schalm, O.; Carro, G.; Lazarov, B.; Jacobs, W.; Stranger, M. Reliability of Lower-Cost Sensors in the Analysis of Indoor Air Quality on Board Ships. Atmosphere 2022, 13, 1579. https://doi.org/10.3390/atmos13101579. [CrossRef]
- BS EN IEC 60812:2018 (E): Failure Modes and Effects Analysis (FMEA and FMECA). The British Standards Institution 2018.
- von Ahsen, A.; Petruschke, L.; Frick, N. Sustainability Failure Mode and Effects Analysis – A Systematic Literature Review. J. Clean. Prod. 2022, 363, 132413. https://doi.org/10.1016/j.jclepro.2022.132413. [CrossRef]
- ISO/IEC 17043: Conformity Assessment - General Requirements for Proficiency Testing 2010.
- ISO/IEC TS 24748-6:2016 Systems and Software Engineering — Life Cycle Management — Part 6: System Integration Engineering 2016.
- Reid, S.C. BS 7925-2: The Software Component Testing Standard. In Proceedings of the Proceedings First Asia-Pacific Conference on Quality Software; IEEE Comput. Soc: Hong Kong, China, 2000; pp. 139–148.
- Real World Testing. What It Means for Health IT Developers Available online: https://www.healthit.gov/sites/default/files/page/2021-02/Real-World-Testing-Fact-Sheet.pdf (accessed on 13 March 2023).
- Feng, Y. Corrosion Behavior of Printed Circuit Boards in Tropical Marine Atmosphere. Int. J. Electrochem. Sci. 2019, 11300–11311. https://doi.org/10.20964/2019.12.73. [CrossRef]
- Association Connecting Electronics Industries IPC-CC-830C: Qualification and Performance of Electrical Insulating Compound for Printed Wiring Assemblies. Bannockburn, IL: IPC 2008.
- International Electrotechnical Commission IEC 60068-2-x: Environmental Testing for Electronic Equipment 2007.
- IEC 60529:2013 Edition 2.2: Degrees of Protection Provided by Enclosures (IP Code). International Electrotechnical Commission 2013.
- Alphasense Application Notes Available online: www.alphasense.com (accessed on 20 March 2023).
- Duvall, R.M.; Hagler, G.S.W.; Clements, A.L.; Benedict, K.; Barkjohn, K.; Kilaru, V.; Hanley, T.; Watkins, N.; Kaufman, A.; Kamal, A.; et al. Deliberating Performance Targets: Follow-on Workshop Discussing PM10, NO2, CO, and SO2 Air Sensor Targets. Atmos. Environ. 2021, 246, 118099. https://doi.org/10.1016/j.atmosenv.2020.118099. [CrossRef]
- Woodall, G.; Hoover, M.; Williams, R.; Benedict, K.; Harper, M.; Soo, J.-C.; Jarabek, A.; Stewart, M.; Brown, J.; Hulla, J.; et al. Interpreting Mobile and Handheld Air Sensor Readings in Relation to Air Quality Standards and Health Effect Reference Values: Tackling the Challenges. Atmosphere 2017, 8, 182. https://doi.org/10.3390/atmos8100182. [CrossRef]
- Williams, R.; Nash, D.; Hagler, G.; Benedict, K.; MacGregor, I.C.; Seay, B.A.; Lawrence, M. EPA/600/R-18/324: Peer Review and Supporting Literature Review of Air Sensor Technology Performance Targets. US Environmental Protection Agency’s Office of Research and Development 2018.
- ASTM WK74360: New Test Method for Evaluating CO2 Indoor Air Quality Sensors or Sensor Systems Used in Indoor Applications 2020.
- ASTM D8406-22. Standard Practice for Performance Evaluation of Ambient Outdoor Air Quality Sensors and Sensor-Based Instruments for Portable and Fixed-Point Measurement 2022.
- ASTM D8405-21: Standard Test Method for Evaluating PM2.5 Sensors or Sensor Systems Used in Indoor Air Applications 2021.
- ASTM WK64899: New Practice for Performance Evaluation of Ambient Air Quality Sensors and Other Sensor-Based Instruments 2018.
- ISO/IEC 17025: General Requirements for the Competence of Testing and Calibration Laboratories 2000.
- Williams, R.; Kilaru, V.; Snyder, E.; Kaufman, A. EPA/600/R-14/159: Air Sensor Guidebook. US Environmental Protection Agency 2014.
- Liang, L.; Daniels, J. What Influences Low-Cost Sensor Data Calibration? - A Systematic Assessment of Algorithms, Duration, and Predictor Selection. Aerosol Air Qual. Res. 2022, 22, 220076. https://doi.org/10.4209/aaqr.220076. [CrossRef]
- Han, P.; Mei, H.; Liu, D.; Zeng, N.; Tang, X.; Wang, Y.; Pan, Y. Calibrations of Low-Cost Air Pollution Monitoring Sensors for CO, NO2, O3, and SO2. Sensors 2021, 21, 256. https://doi.org/10.3390/s21010256. [CrossRef]
- Teh, H.Y.; Kempa-Liehr, A.W.; Wang, K.I.-K. Sensor Data Quality: A Systematic Review. J. Big Data 2020, 7, 11. https://doi.org/10.1186/s40537-020-0285-1. [CrossRef]
- ISO 8000-63: Data Quality — Part 63: Data Quality Management: Process Measurement 2019.
- Mansouri, M.; Harkat, M.-F.; Nounou, M.; Nounou, H. Midpoint-Radii Principal Component Analysis -Based EWMA and Application to Air Quality Monitoring Network. Chemom. Intell. Lab. Syst. 2018, 175, 55–64. https://doi.org/10.1016/j.chemolab.2018.01.016. [CrossRef]
- Vedurmudi, A.P.; Neumann, J.; Gruber, M.; Eichstädt, S. Semantic Description of Quality of Data in Sensor Networks. Sensors 2021, 21, 6462. https://doi.org/10.3390/s21196462. [CrossRef]
- Chojer, H.; Branco, P.T.B.S.; Martins, F.G.; Alvim-Ferraz, M.C.M.; Sousa, S.I.V. Can Data Reliability of Low-Cost Sensor Devices for Indoor Air Particulate Matter Monitoring Be Improved? – An Approach Using Machine Learning. Atmos. Environ. 2022, 286, 119251. https://doi.org/10.1016/j.atmosenv.2022.119251. [CrossRef]
- Kang, Y.; Aye, L.; Ngo, T.D.; Zhou, J. Performance Evaluation of Low-Cost Air Quality Sensors: A Review. Sci. Total Environ. 2022, 818, 151769. https://doi.org/10.1016/j.scitotenv.2021.151769. [CrossRef]
- Mergen, A.E.; Holmes, D.S. Signal to Noise Ratio-What Is the Right Size? Available online: https://www.qualitymag.com/articles/85067-signal-to-noise-ratio-what-is-the-right-size (accessed on 16 May 2023).
- Karkouch, A.; Mousannif, H.; Al Moatassime, H.; Noel, T. Data Quality in Internet of Things_ A State-of-the-Art Survey. J. Netw. Comput. Appl. 2016, 73, 57–81. https://doi.org/10.1016/j.jnca.2016.08.002. [CrossRef]
- Ródenas García, M.; Spinazzé, A.; Branco, P.T.B.S.; Borghi, F.; Villena, G.; Cattaneo, A.; Di Gilio, A.; Mihucz, V.G.; Gómez Álvarez, E.; Lopes, S.I.; et al. Review of Low-Cost Sensors for Indoor Air Quality: Features and Applications. Appl. Spectrosc. Rev. 2022, 57, 747–779. https://doi.org/10.1080/05704928.2022.2085734. [CrossRef]
- DIRECTIVE 2004/107/EC OF THE EUROPEAN PARLIAMENT AND OF THE COUNCIL of 15 December 2004 Relating to Arsenic, Cadmium, Mercury, Nickel and Polycyclic Aromatic Hydrocarbons in Ambient Air. Official Journal of the European Union 2005.
- Langford, G.O. Engineering Systems Integration: Theory, Metrics, and Methods; 1st ed.; CRC Press: Boca Raton, 2016; ISBN 978-0-429-10974-4.
- Hernandez-Rodriguez, E.; Kairuz-Cabrera, D.; Martinez, A.; Amalia, R.; Schalm, O. Low-Cost Portable System for the Estimation of Air Quality. In Proceedings of 19th Latin American Control Congress (LACC 2022); Studies in Systems, Decision and Control; Springer Cham: La Habana, Cuba, 2022; Vol. 464, p. XII, 312 ISBN 978-3-031-26361-3.
- Rodríguez, E.H.; Schalm, O.; Martínez, A. Development of a Low-Cost Measuring System for the Monitoring of Environmental Parameters That Affect Air Quality for Human Health. ITEGAM-JETIA 2020, 6. https://doi.org/10.5935/2447-0228.20200013. [CrossRef]
- González Rivero, R.A.; Schalm, O.; Alvarez Cruz, A.; Hernández Rodríguez, E.; Morales Pérez, M.C.; Alejo Sánchez, D.; Martinez Laguardia, A.; Jacobs, W.; Hernandez Santana, L. Relevance and Reliability of Outdoor SO2 Monitoring in Low-Income Countries Using Low-Cost Sensors. Atmosphere 2023, 14. https://doi.org/10.3390/atmos14060912. [CrossRef]
- Taleb, N.N. The Black Swan: The Impact of the Highly Improbable; Incerto; Random House (U.S.): United States, 2007; ISBN 978-1-4000-6351-2.
- Zimmerman, N.; Presto, A.A.; Kumar, S.P.N.; Gu, J.; Hauryliuk, A.; Robinson, E.S.; Robinson, A.L.; Subramanian, R. Closing the Gap on Lower Cost Air Quality Monitoring: Machine Learning Calibration Models to Improve Low-Cost Sensor Performance. Atmos. Meas. Tech. 2017. https://doi.org/10.5194/amt-2017-260Manuscript. [CrossRef]
- Narayana, M.V.; Jalihal, D.; Nagendra, S.M.S. Establishing A Sustainable Low-Cost Air Quality Monitoring Setup: A Survey of the State-of-the-Art. Sensors 2022, 22, 394. https://doi.org/10.3390/s22010394. [CrossRef]
- Cross, E.S.; Lewis, D.K.; Williams, L.R.; Magoon, G.R.; Kaminsky, M.L.; Worsnop, D.R.; Jayne, J.T. Use of Electrochemical Sensors for Measurement of Air Pollution: Correcting Interference Response and Validating Measurements. Atmos. Meas. Tech. 2017, 10. https://doi.org/10.5194/amt-10-3575-2017. [CrossRef]
- Lacour, S.A.; de Monte, M.; Diot, P.; Brocca, J.; Veron, N.; Colin, P.; Leblond, V. Relationship between Ozone and Temperature during the 2003 Heat Wave in France: Consequences for Health Data Analysis. BMC Public Health 2006, 6, 261. https://doi.org/10.1186/1471-2458-6-261. [CrossRef]
- Coates, J.; Mar, K.A.; Ojha, N.; Butler, T.M. The Influence of Temperature on Ozone Production under Varying NOx Conditions – a Modelling Study. Atmos. Chem. Phys. 2016, 16, 11601–11615. https://doi.org/10.5194/acp-16-11601-2016. [CrossRef]
- Olesen, B.W.; Bogatu, D.-I.; Kazanci, O.B.; Coakley, D. The Use of CO2 as an Indicator for Indoor Air Quality and Control of Ventilation According to EN16798-1 and TR16798-2.; Mitsubishi Electric R&D Centre: Politecnico di Torino, Italy, 2020.
- Hui, P.S.; Wong, L.T.; Mui, K.W. Using Carbon Dioxide Concentration to Assess Indoor Air Quality in Offices. Indoor Built Environ. 2008, 17, 213–219. https://doi.org/10.1177/1420326X08091773. [CrossRef]
- Awad, A.; Wang, H. Roll-Pitch-Yaw Autopilot Design for Nonlinear Time-Varying Missile Using Partial State Observer Based Global Fast Terminal Sliding Mode Control. CJA 2016, 29, 1302–1312. https://doi.org/10.1016/j.cja.2016.04.020. [CrossRef]
- Ackerman, J.L.; Proffit, W.R.; Sarver, D.M.; Ackerman, M.B.; Kean, M.R. Pitch, Roll, and Yaw: Describing the Spatial Orientation of Dentofacial Traits. AJODO 2007, 131, 305–310. https://doi.org/10.1016/j.ajodo.2006.05.032. [CrossRef]
- Martinez, A.; Hernandez, L.; Sahli, H.; Valeriano-Medina, Y.; Orozco-Monteagudo, M.; Garcia-Garcia, D. Model-Aided Navigation with Sea Current Estimation for an Autonomous Underwater Vehicle. Int. J. Adv. Robot. Syst. 2015, 12, 103. https://doi.org/10.5772/60415. [CrossRef]
- Schalm, O.; Carro, G.; Jacobs, W.; Lazarov, B.; Stranger, M. The Inherent Instability of Environmental Parameters Governing Indoor Air Quality on Board Ships and the Use of Temporal Trends to Identify Pollution Sources. Indoor Air 2023, 2023, 1–19. https://doi.org/10.1155/2023/7940661. [CrossRef]
- Tena-Gago, D.; Wang, Q.; Alcaraz-Calero, J.M. Non-Invasive, Plug-and-Play Pollution Detector for Vehicle on-Board Instantaneous CO2 Emission Monitoring. IoT 2023, 100755. https://doi.org/10.1016/j.iot.2023.100755. [CrossRef]
- SprintIR-W Data Sheet. Product Flyer- Document Version: 16/04/2020-002 2020.
Figure 1.
Front side of the sensor shield. (a) PCB design of the sensor shield as made in KiCad; (b) Photo of the same sensor shield fully assembled and placed on top of the Arduino Mega.
Figure 1.
Front side of the sensor shield. (a) PCB design of the sensor shield as made in KiCad; (b) Photo of the same sensor shield fully assembled and placed on top of the Arduino Mega.
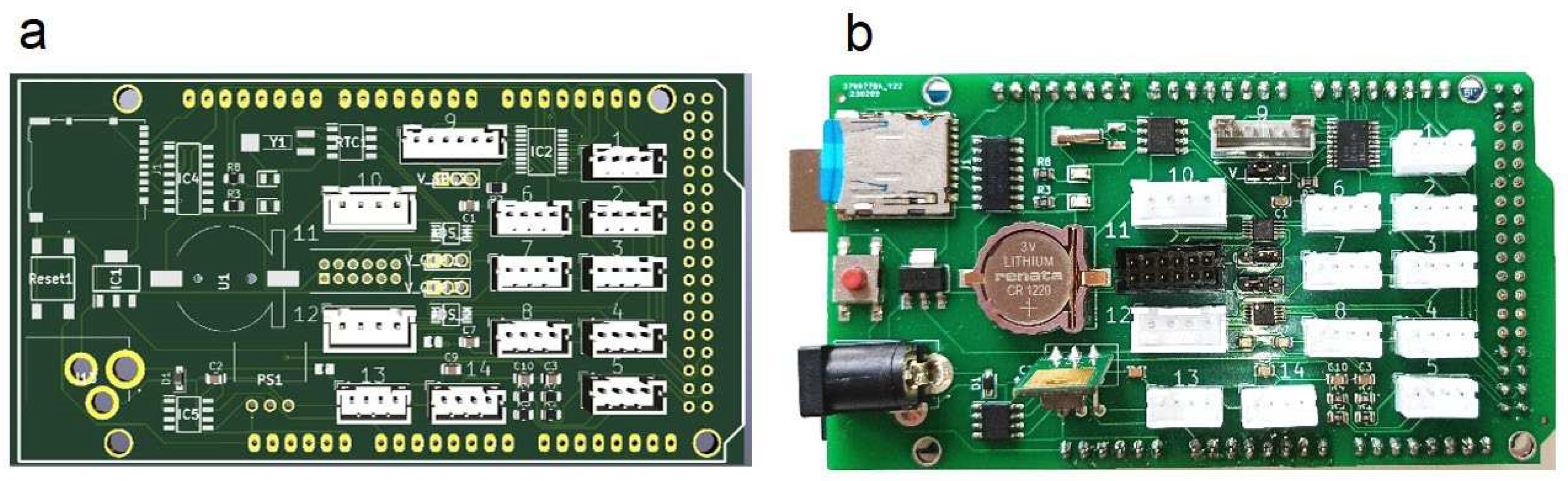
Figure 2.
Schematic representation of the software architecture.
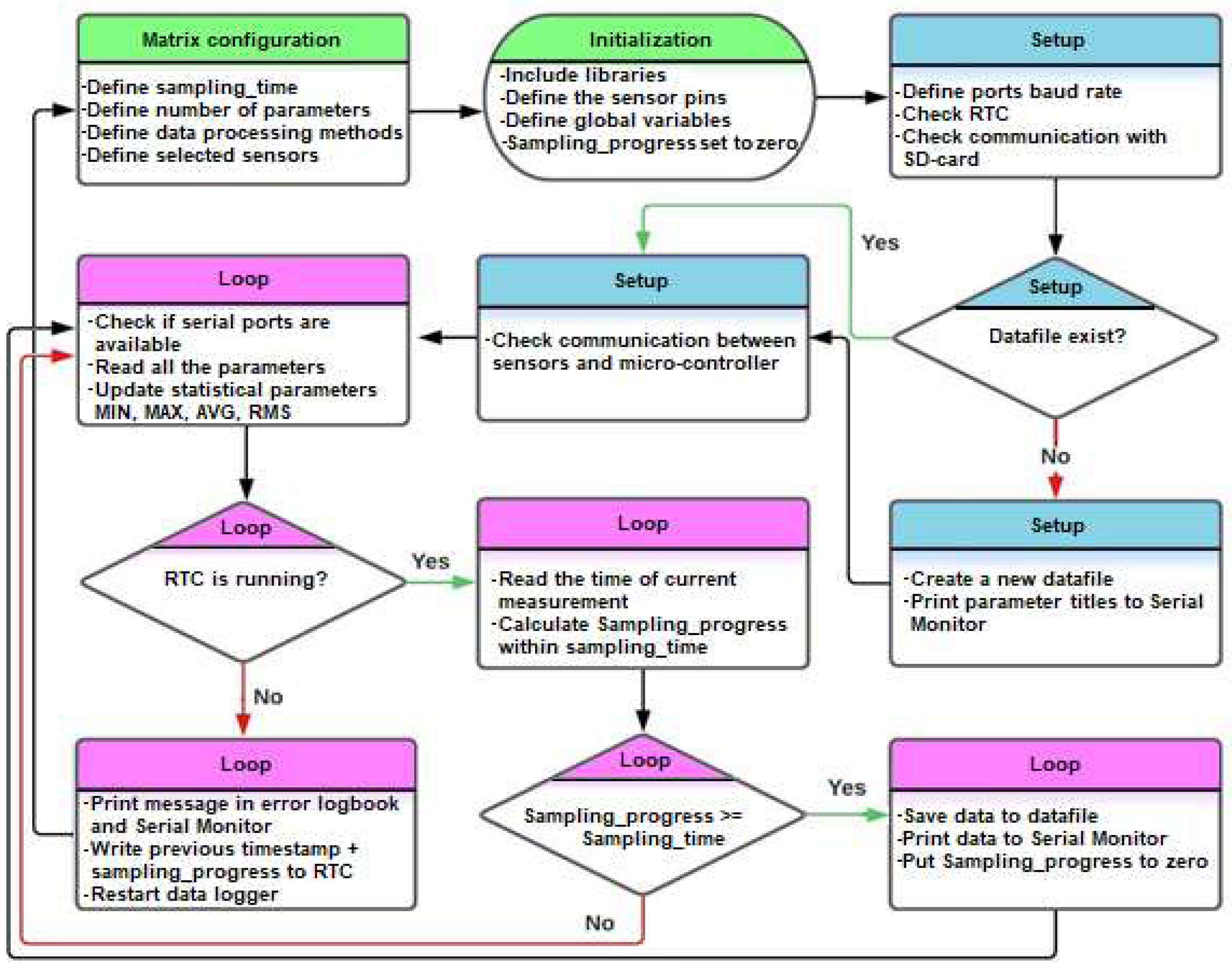
Figure 3.
Schematic representation of the setup to monitor exhaust gases emitted by a diesel generator.
Figure 3.
Schematic representation of the setup to monitor exhaust gases emitted by a diesel generator.
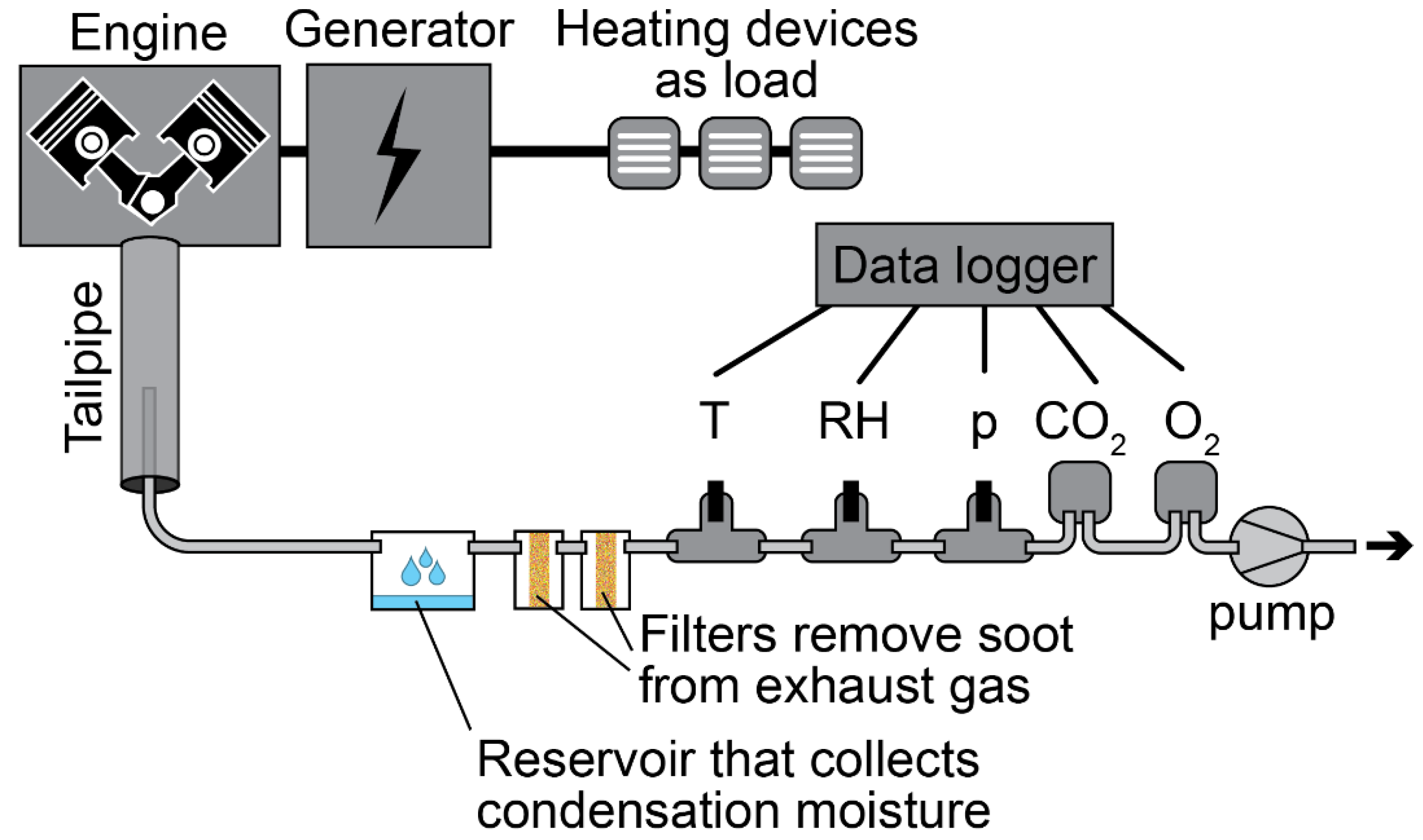
Figure 4.
Relationship between sensor data and reference data for several environmental parameters where the coefficient of determination describes the similarity indicator 2.5. The symbol WE and AE signify the signal of the working and auxiliary electrode of the gas sensor and the subscript zero refers to zero air without any pollutants.
Figure 4.
Relationship between sensor data and reference data for several environmental parameters where the coefficient of determination describes the similarity indicator 2.5. The symbol WE and AE signify the signal of the working and auxiliary electrode of the gas sensor and the subscript zero refers to zero air without any pollutants.
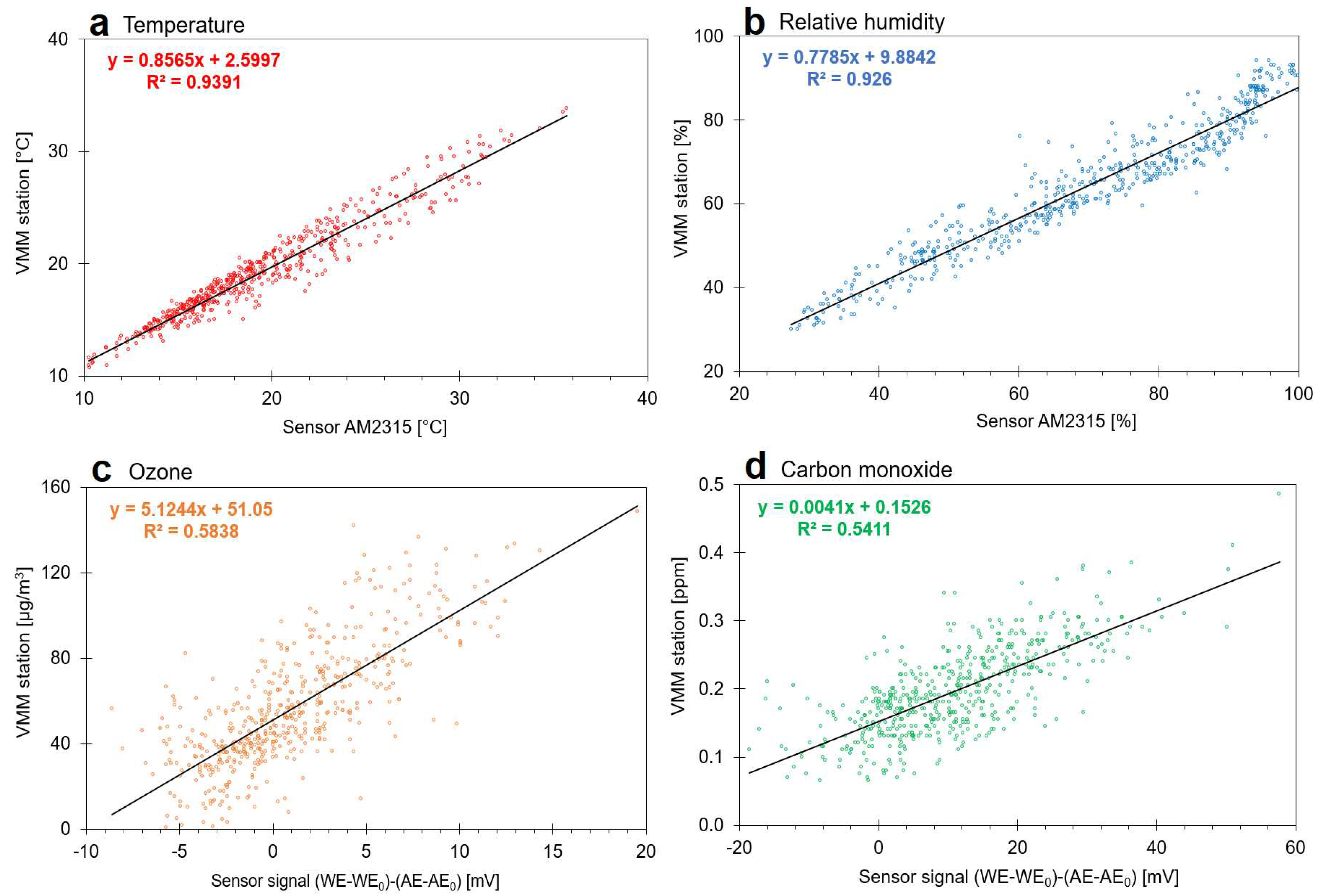
Figure 5.
Time series plots of the outdoor air monitoring at the VMM station in Antwerp, Belgium using a low-cost monitoring system from June 3 to 30, 2022. The plots show the occurrence of meaningful trends in the graphs from which information can be extracted.
Figure 5.
Time series plots of the outdoor air monitoring at the VMM station in Antwerp, Belgium using a low-cost monitoring system from June 3 to 30, 2022. The plots show the occurrence of meaningful trends in the graphs from which information can be extracted.
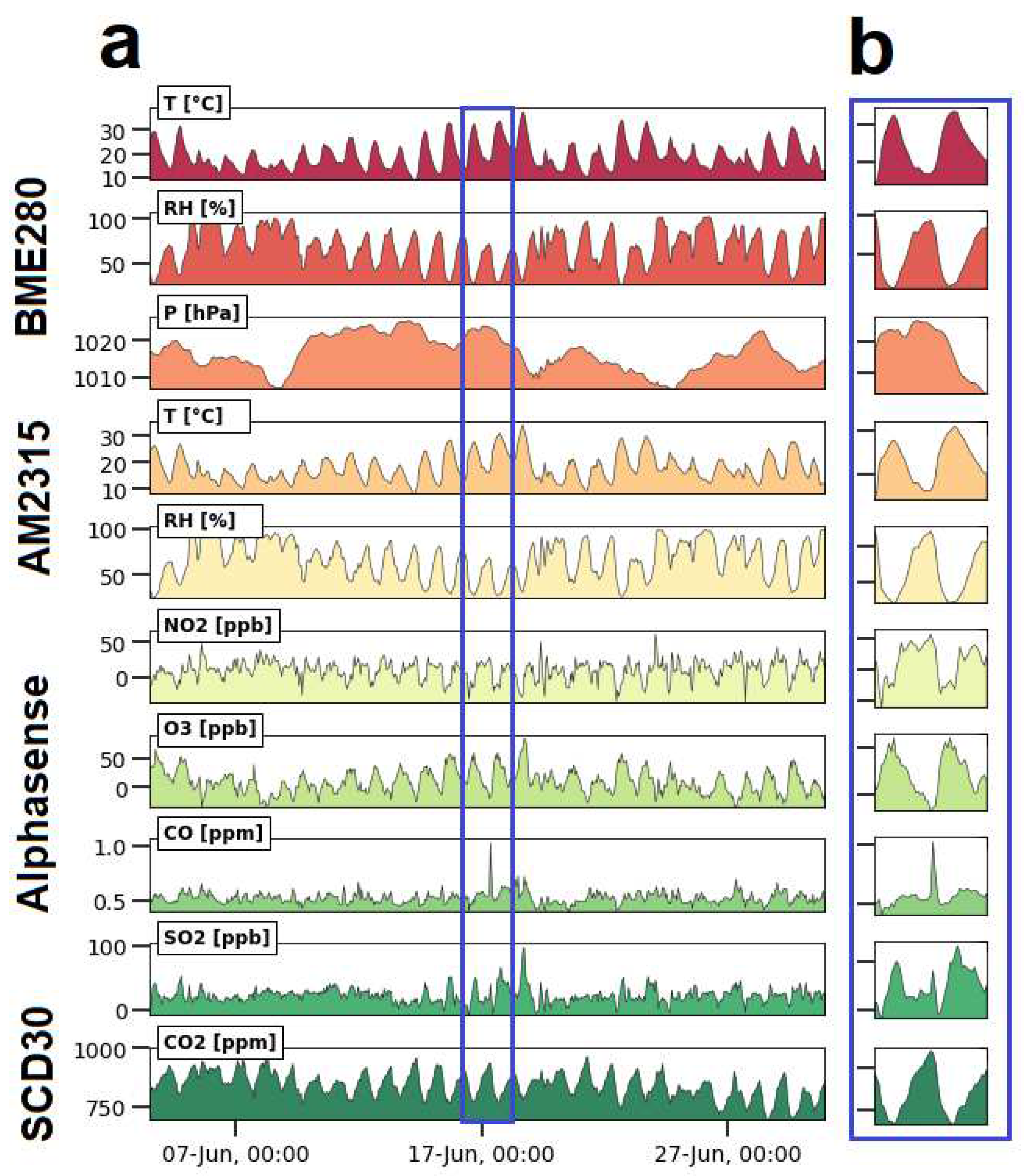
Figure 6.
Results of the office monitoring at the Antwerp Maritime Academy using a low-cost monitoring system from March 8 to 22, 2023. a) Overview of the campaign; b) Detail of a single workday.
Figure 6.
Results of the office monitoring at the Antwerp Maritime Academy using a low-cost monitoring system from March 8 to 22, 2023. a) Overview of the campaign; b) Detail of a single workday.
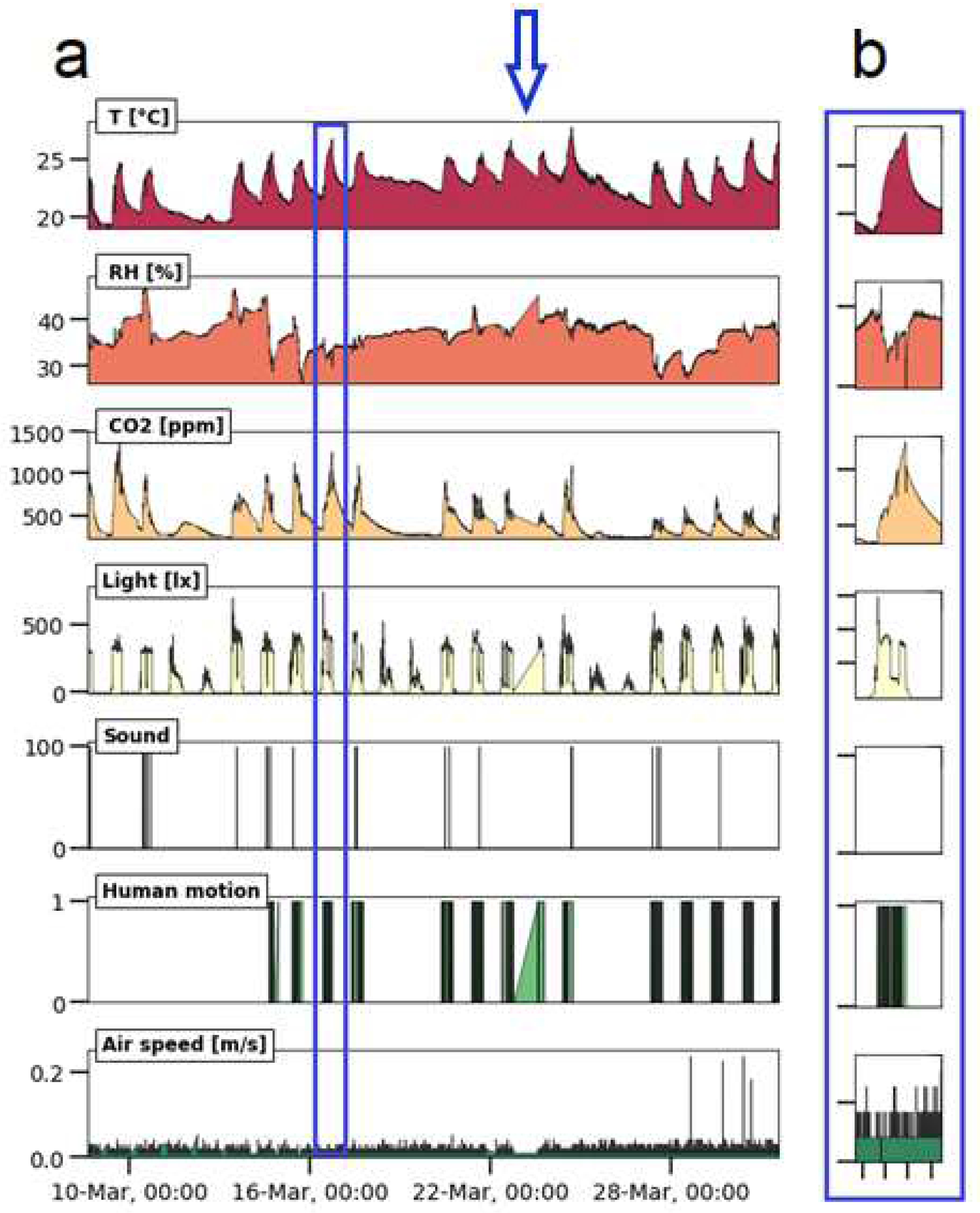
Figure 7.
Results of motion monitoring during a bike journey from AMA (i.e., the start point of the time series) to home (i.e., end point of the time series) using a low-cost monitoring system on March 17, 2023. The marked rectangles in the Figure refer to the 6 documented events in the trajectory as shown in the map of Figure 8.
Figure 7.
Results of motion monitoring during a bike journey from AMA (i.e., the start point of the time series) to home (i.e., end point of the time series) using a low-cost monitoring system on March 17, 2023. The marked rectangles in the Figure refer to the 6 documented events in the trajectory as shown in the map of Figure 8.
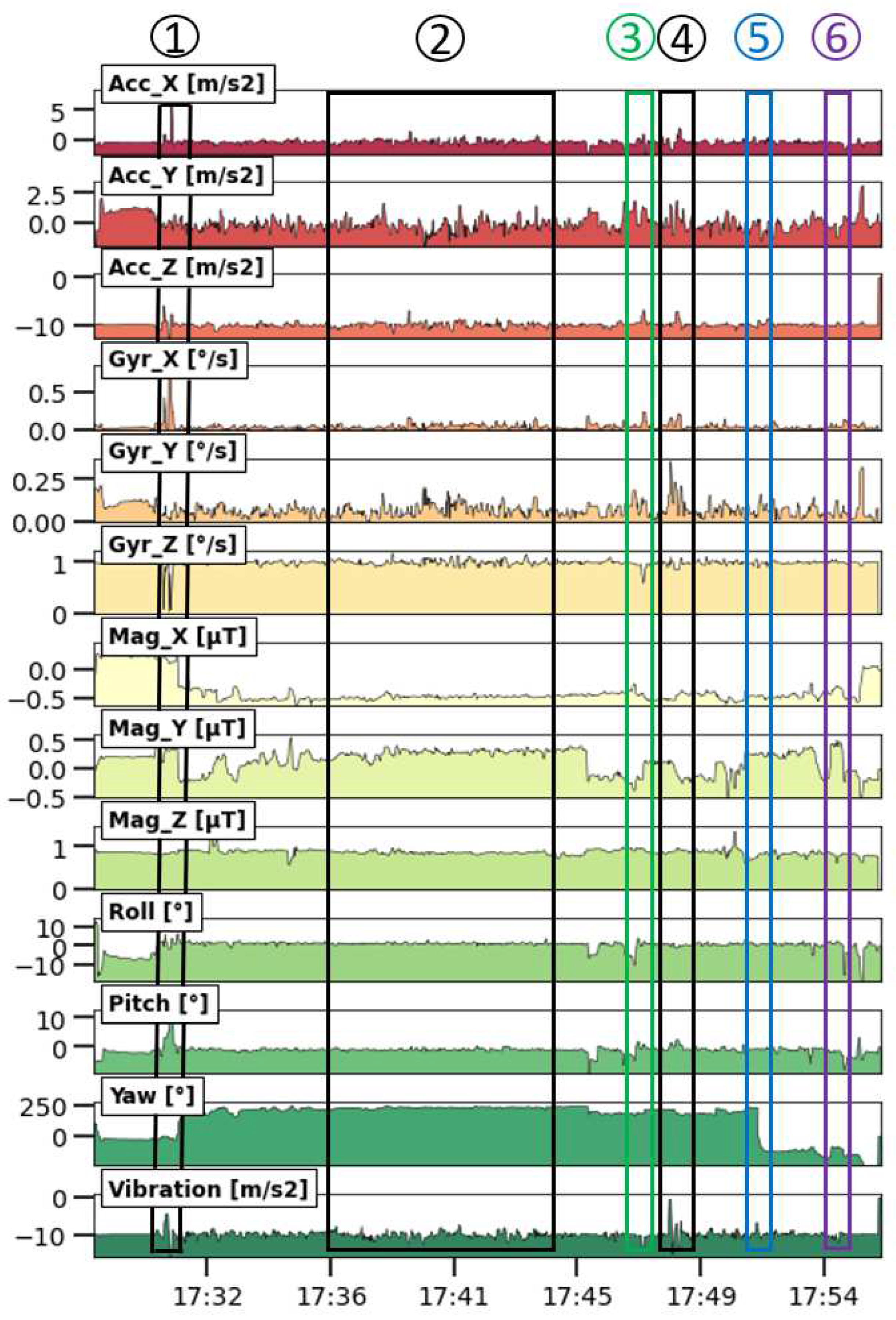
Figure 8.
Journey of ca. 5.5 km from AMA to home by bike at an average speed of 11 km/h together with the position of the events caused by irregularities in the road. The red dots stand for cyclist's position according to the GPS sensor GY-GPSV3-NEO-M8N.
Figure 8.
Journey of ca. 5.5 km from AMA to home by bike at an average speed of 11 km/h together with the position of the events caused by irregularities in the road. The red dots stand for cyclist's position according to the GPS sensor GY-GPSV3-NEO-M8N.
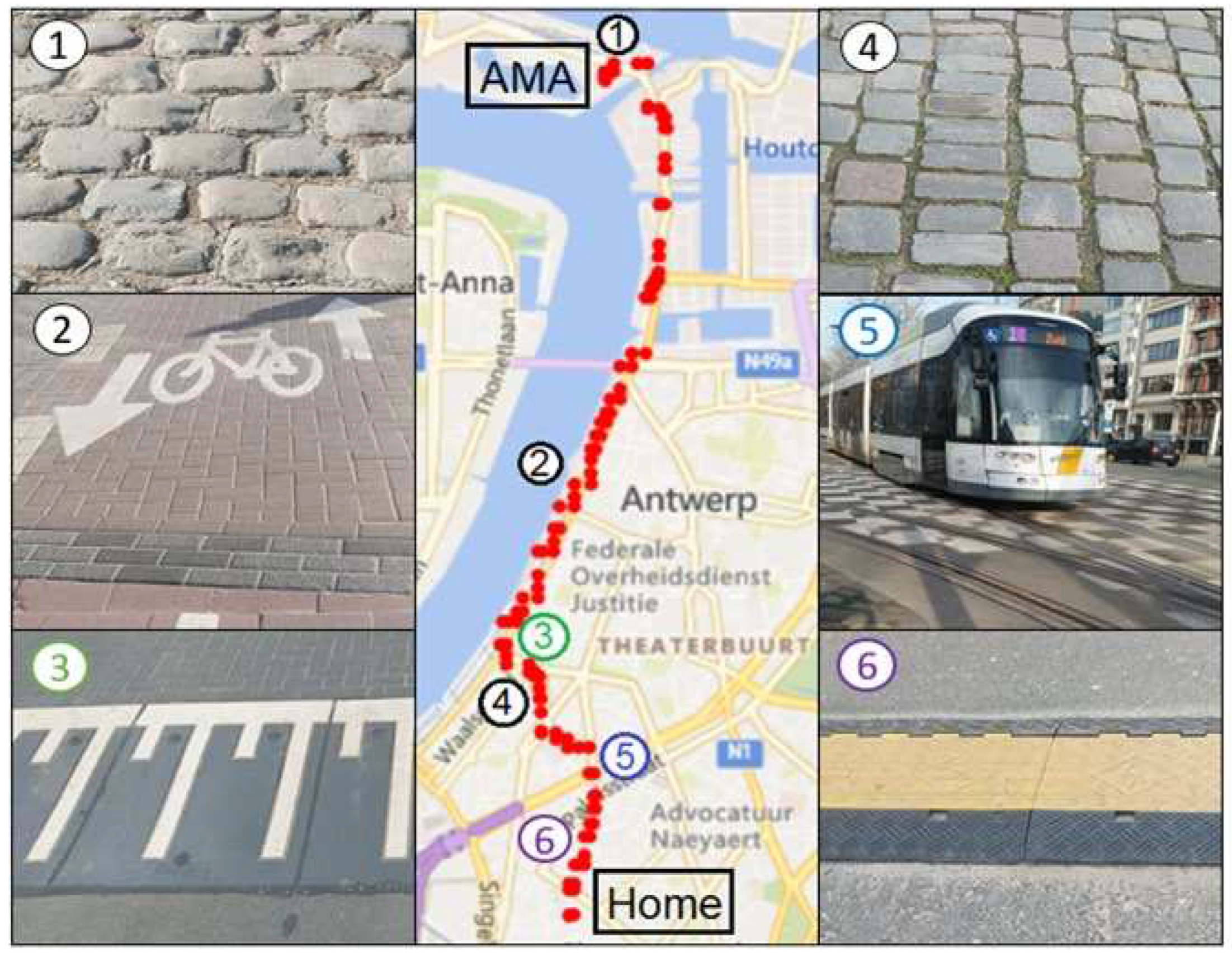
Figure 9.
Schematic overview of the 6 degrees of freedom forward/back, left/right, up/down, and including the rotations along each axis roll, pitch and yaw (Euler angles).
Figure 9.
Schematic overview of the 6 degrees of freedom forward/back, left/right, up/down, and including the rotations along each axis roll, pitch and yaw (Euler angles).
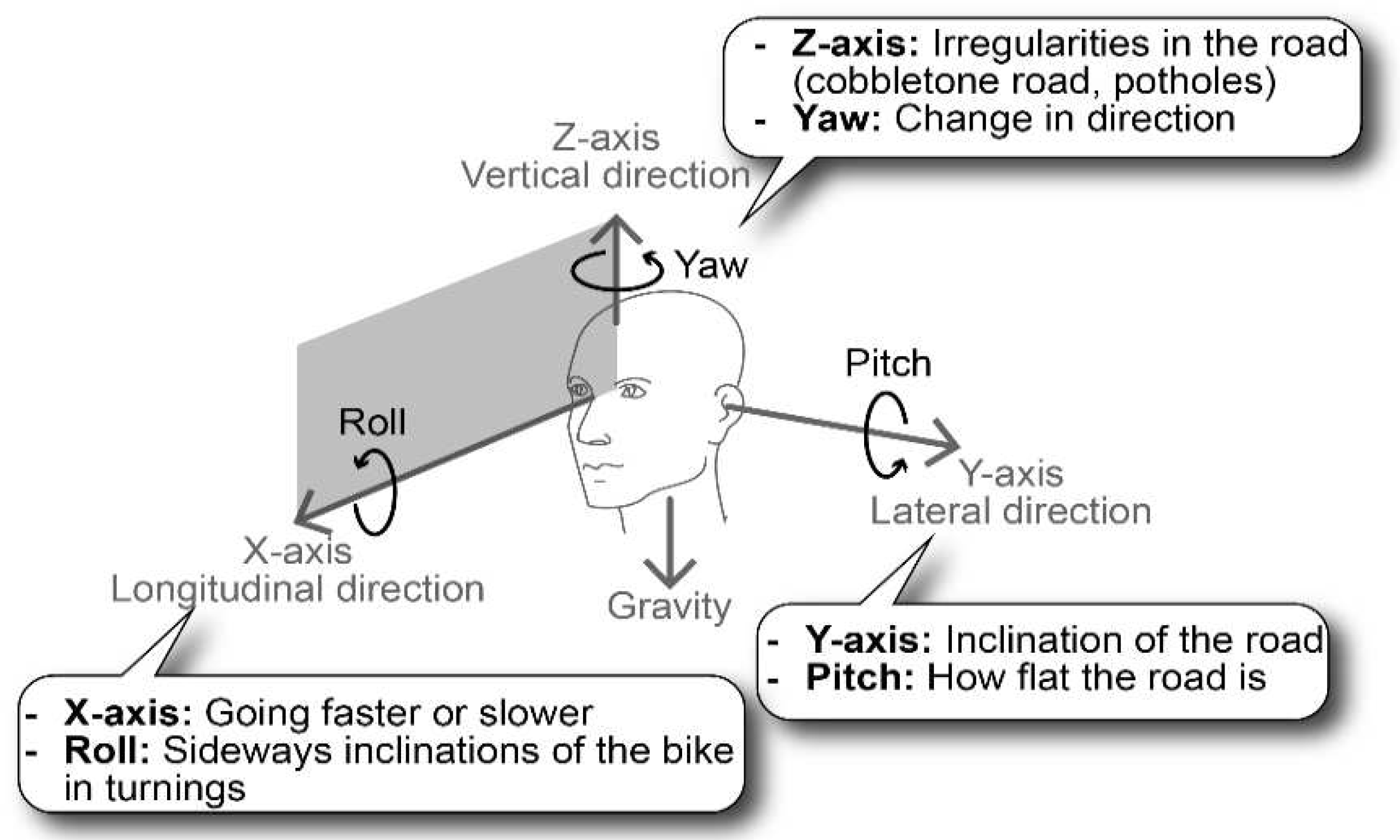
Figure 10.
The monitoring of a journey on a bike shown as a time series for the acceleration along the Z-axis as measured by the vibration sensor VS-BV203-B and the accelerometer in Z-axis of RSX-UM7. The events shown in Figure 8 are also indicated here.
Figure 10.
The monitoring of a journey on a bike shown as a time series for the acceleration along the Z-axis as measured by the vibration sensor VS-BV203-B and the accelerometer in Z-axis of RSX-UM7. The events shown in Figure 8 are also indicated here.
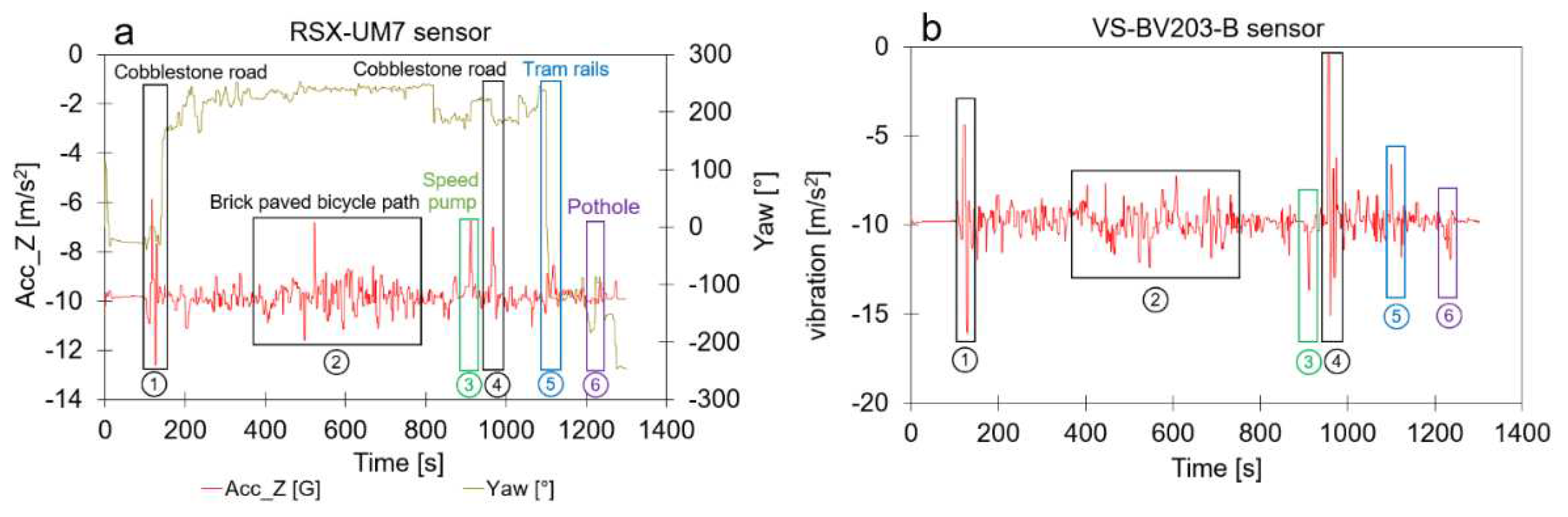
Figure 11.
Results of exhaust gas monitoring using a low-cost gas conditioning system and a low-cost monitoring system. The 3 consecutive experiments were performed on March 5, 2023. For each experiment a clean filter was used. a) Experiment using normal diesel but where the pump in the exhaust gas extraction setup was not switched on; b) Same experiment as previous but where the pump was switched on; c) Experiment at different loads.
Figure 11.
Results of exhaust gas monitoring using a low-cost gas conditioning system and a low-cost monitoring system. The 3 consecutive experiments were performed on March 5, 2023. For each experiment a clean filter was used. a) Experiment using normal diesel but where the pump in the exhaust gas extraction setup was not switched on; b) Same experiment as previous but where the pump was switched on; c) Experiment at different loads.
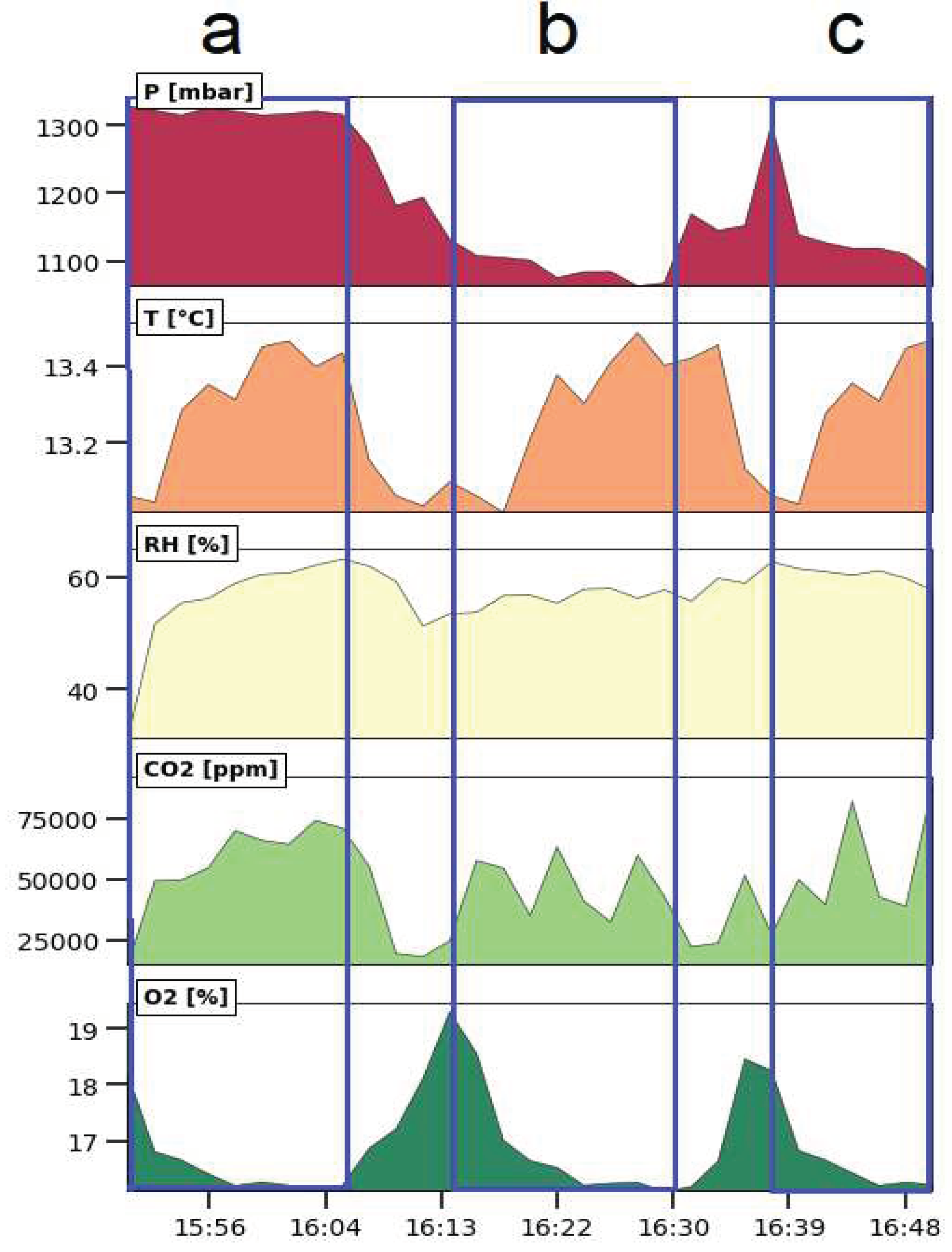

Table 1.
Overview of the performance indicators related to the level of the instrument that are used by developers to evaluate their instrument.
Table 1.
Overview of the performance indicators related to the level of the instrument that are used by developers to evaluate their instrument.
| Nr. | Name indicator | Description indicator and goal to be achieved |
|---|---|---|
| 1.1 | System integration | Individual components, sub-systems and software are integrated into one system without giving internal conflicts [35]. |
| 1.2 | Sensor validation | Sensors meet the performance specifications as described in their specification sheets. |
| 1.3 | Bug-free software | The software does not produce incorrect or unexpected results, and does not behave in unintended ways [36]. |
| 1.4 | Transparency | Open-source software is written in a clear and concise way with sufficient comments and/or additional documentation (e.g., manual). Others should be able to understand the software in a fairly simple way and to make improvements when needed. |
| 1.5 | Robustness in real-world conditions | The performance of the system should be tested for environments that are of relevance to the user. The degradation rate of the hardware when exposed to real-world conditions or to accelerated life testing gives an insight in the robustness of the data logger. In our case, the data logger should handle the hostile environmental conditions as in Cuba which is known for its tropicalization problem (i.e., degradation rate of PCB-coatings due to high T, high RH, high solar radiation and corrosion of soldering due to high airborne salinity) [37,38,39,40]. It should also handle harsh operational conditions (e.g., during the motion monitoring several wires got disconnected due to vibrations). It also entails the regular power cuts in Cuba or condensation of moisture on the hardware in Belgium. |
| 1.6 | Housing | The housing ensures that the sensors have contact with the monitored environment while providing protection against weather conditions like rain. It fully meets the specifications of an IP65 casing [41,42]. |
Table 2.
Overview of the performance indicators related to the level of the sensors.
| Nr. | Name indicator | Description indicator and goal to be achieved |
|---|---|---|
| 2.1 | Robustness against its environment | Sensors are in direct contact with the environment they are monitoring. They must withstand abnormally fast wear and tear, various physical and chemical stresses such as shocks, vibrations, or a tropical climate so that their lifetime is sufficiently long to perform monitoring campaigns. |
| 2.2 | Response time | The sensors respond sufficiently fast to environmental changes of interest to the user with sufficiently low hysteresis. |
| 2.3 | Replicability | Sensors provide the same response under identical conditions at different time intervals for a sufficiently long period of time or gradual changes can be mathematically corrected. When a measurement is repeated, similar results are expected and the random error due to noise is sufficiently small. |
| 2.4 | Calibration setup | The sensors can be calibrated with a setup that generates sufficiently controllable conditions |
| 2.5 | Similarity | The calibration method is effective when the sensor shows a high similarity with the factory-calibration, with other sensors, or with the gold standard. The similarity between sensor and reference can be expressed by the coefficient of determination, root mean squared error, mean absolute error, mean normalized bias, or the coefficient of variation [51,52,53]. The similarity determines the probability that a measurement is correct. |
Table 3.
Overview of the performance indicators related to the level of the data and especially to the quality of the collected data.
Table 3.
Overview of the performance indicators related to the level of the data and especially to the quality of the collected data.
| Nr. | Name indicator | Description indicator and goal to be achieved |
|---|---|---|
| 3.1 | Perceptibility | The variation of the parameter to be measured is larger than the detection limit of the sensor and lower than its saturation point. In addition, the resolution of the sensor is sufficiently high to observe subtle changes in the environment that are of interest to the user. For example, temperature changes in oceans of 0.001°C are highly relevant in the study of climate change. Moreover, the sensor must be sufficiently selective so that the impact of interfering environmental parameters is sufficiently small (i.e., a limited cross-sensitivity to other parameters). |
| 3.2 | Signal-to-noise ratio | The level of the desired signal is sufficiently higher than the background noise (signal > average background level plus 3 times the standard deviation) so that small changes in the trends that are of interest to the user can be observed [60]. |
| 3.3 | Sensor errors | The sensor does not generate responses that have no physical meaning such as outliers, drifts, bias or uncertainty. Such behaviour must be identified and corrected [61,62]. |
| 3.4 | Completeness | The minimum data capture and time coverage without considering the losses of data due to regular calibration and normal maintenance of the instrument should be as high as possible and preferable higher than 90% [63]. |
| 3.5 | Meaningfulness | Data contains relevant information needed to answer a specific question of the user or to solve a specific problem of interest to the user. |
| 3.6 | Data structure | The structure of the data file must be sufficiently simple so that a software (e.g., Microsoft Excel) or a user can read the data. Besides a clear structure in the organisation of the data, the data is also supposed to be at equidistant time intervals. |
Table 4.
Overview of all the sensors that are included in the software and the sensors that were used per case study.
Table 4.
Overview of all the sensors that are included in the software and the sensors that were used per case study.
| Sensor | Parameters | Outdoor air monitoring | Office monitoring | Motion monitoring | Exhaust gas monitoring |
|---|---|---|---|---|---|
| ASAIR, AM2315 | T, RH | x | |||
| Adafruit, BME280 | T, RH, P | x | |||
| TERA Sensor, NextPM | PM10, PM2.5, PM1 | x | |||
| Alphasense, A-series gas sensors | NO2, Ox, CO, SO2 | x | |||
| Sensirion, SCD30 | CO2, T, RH | x | x | ||
| E+E, EE650 | Air velocity | x | |||
| SparkFun, SEN-12642 | Sound | x | |||
| Adafruit, VEML7700 | Visible light | x | |||
| Parallax Inc, PIR sensor 555-28027 | Human motion | x | |||
| Redshift Labs, RSX-UM7 | Orientation | x | |||
| Kemet, VS-BV203-B | Vibration | x | |||
| U-BLOX, GY-GPSV3-NEO-M8N | GPS position | x | |||
| SST sensing, SprintIR-WF-20 | CO2 | x | |||
| SST sensing, LuminOx | O2 | x | |||
| Atlas Scientific, EZO HUM | T, RH | x | |||
| Atlas Scientific, EZO-PRS | P | x |
Table 5.
Overview of all exhaust gas monitoring experiments and changes in operational conditions.
| Parameters | Experiment a | Experiment b | Experiment c |
|---|---|---|---|
| Duration [minutes] | 15 | 15 | 15 |
| Fuel type | Normal Diesel with less than 10 ppm of sulphur | Normal Diesel with less than 10 ppm of sulphur | Normal Diesel with less than 10 ppm of sulphur |
| Pump in gas extraction setup | No | Yes | Yes |
| Load on the generator | No | No | Yes |
| Change RPM of the generator | No | No | Yes |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



