Submitted:
01 June 2023
Posted:
02 June 2023
You are already at the latest version
Abstract
CNN-based off-the-shelf features have shown themselves as a good baseline for trademark retrieval. However, in recent years, the computer vision area was transitioning from CNNs to a new architecture – Vision Transformer. In this paper, we investigate the performance of off-the-shelf features extracted with vision transformers and explore the effects of pre, post-processing, and pre-training on big datasets. We propose a method of joint usage of global and local features, which leverages the best aspects of both approaches. Experimental results on METU Trademark Dataset show that off-the-shelf features extracted with ViT-based models outperform off-the-shelf features from CNN-based models. The proposed method achieves the mAP value of 31.23, surpassing previous state-of-the-art results. We assume that the proposed approach for the trademark similarity evaluation will allow one to improve the protection of such data with the help of artificial intelligence methods. Moreover, this approach will allow one to identify cases of unfair use of such data and form an evidence base for litigation.
Keywords:
trademarks
; data protection
; artificial intelligence
; image processing
; trademark retrieval
1. Introduction
A trademark (logo) is a company’s most valuable intellectual property. Trademarks require registration to avoid reputational damage and damage to profits caused by trademark infringement. A trademark can only be registered if unique and unlike other registered trademarks.
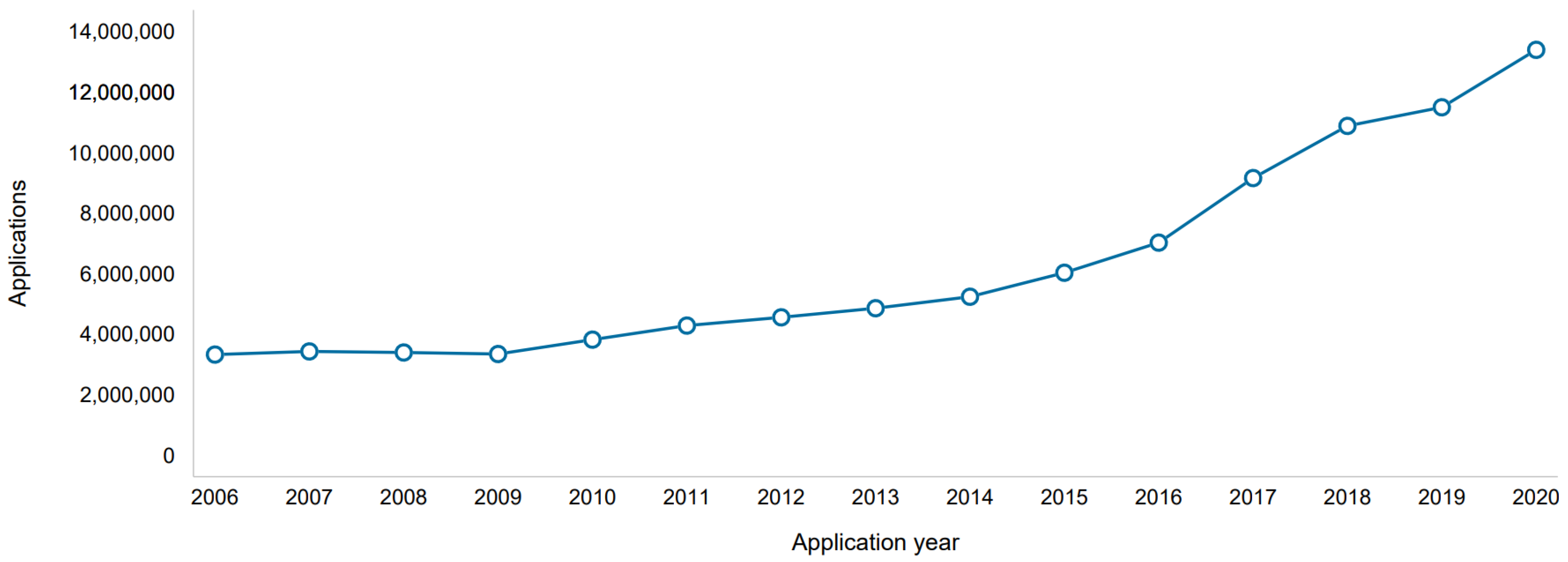
An estimated 13.4 million trademark applications were filed worldwide in 2020. That’s nearly 1.9 million more than were filed in 2019, an increase of 16.5 % over the previous year. This high growth rate was achieved despite the onset of the COVID-19 pandemic and the following global economic downturn. This is also the eleventh consecutive year of growth since the end of the global financial crisis and a return to double-digit growth rates, up from 5.7 % in 2019, see Figure 1 [1].
A quick way to search for similar logos is needed to prevent intellectual property theft. Manual search is practically impossible due to the number of registered trademarks and issues with scaling the search. This necessitates the development of methods to automate such searches. With the help of such methods, it is possible to create a system to help an expert search for similar logos.
The standard approach for finding similar logos is using off-the-shelf neural network features based on CNN architecture. In this paper, we compare the quality of off-the-shelf features extracted by convolutional neural network (CNN) and vision transformer (ViT), consider the effect of different pre- and post-processing techniques, and add local features to improve the final result. To the best of our knowledge, this is the first study that examines the use of ViT for similar logo search tasks and the effect of pre- and post-processing on the quality of similar logo searches.
This article consists of 6 sections. In Section 1, we justified the need to search for similar logos and outlined the novelty of the work. In Section 2, we review the relevant literature and research directions. Section 3 presents an approach to image preprocessing for analyzing trademark similarity using ViT models and local features. In Section 4, we describe the dataset and experimental results and analyze the results. In Section 5, we discuss the search results using the developed method, and in Section 6, we present conclusions and describe directions for further research.
Figure 1.
Chart of the number of applications for registration of new trademarks
2. Related work
The trademark retrieval task is a subtask of image retrieval that researchers have been working on for quite some time. The most common type of retrieval is Content-based image retrieval (CBIR). This approach uses computer vision techniques to solve the challenge of finding similar images. The following features are used to search similar images: shape, color, texture, local features (based on key points), global features (based on the use of neural networks) and others.
In [2], a dataset for testing the similarity search algorithms - METU Trademark Dataset, and a comparison of classical features (texture, shape, color histogram) and features generated by a neural network on the task of searching for similar trademarks are presented. The article shows that the classical features are significantly inferior to the features generated by the neural network. We considered AlexNet [3], GoogLeNet [4] and VGG16 [5], trained on the ImageNet dataset [6]. Fusion of all the models and methods considered in this article achieved a NAR of 0.062 ± 0.095 (Normalized average rank).
In [7], the authors fine-tuned two VGG19 models pre-trained on the ImageNet dataset. VGG19v was fine-tuned on data where images are visually similar, and VGG19c on conceptually similar images. A classification loss function was used, and the final NAR value was 0.047 ± 0.095.
The development of the trademark retrieval field goes hand in hand with the development of the image retrieval field. This is not surprising, since the search for similar trademarks is a subtask of the search for similar images.
In the following papers, the authors started experiments with Pooling layers: MAC, SPoC [8], CroW [9], R-MAC [10], and GeM [11]. These articles describe how to obtain better features from CNN layers using different Pooling layers.
VGG16 and MAC/SPoC/CRoW/R-MAC on the trademark search problem are discussed in [12]. It also deals with the issue that the neural network is “distracted” by the text in the trademark, which reduces the search quality. The authors have developed 2 Attention management methods to give more weight to the geometric component of the trademark, not the text. The best model uses R-MAC, and text removal has the mAP (mean Average Precision) value equal to 25.7.
In [13], the authors considered the possibility of applying the attention mechanism, CNN architecture and unsupervised learning. The final model used ECANet50 and was trained with instance discrimination. The model showed a NAR of 0.051 ± 0.002.
In [14], the authors apply reinforcement learning to train an ensemble of TTA (Test-time augmentation) image augmentation policies. This technique makes off-the-shelf features of CNN models more invariant to various image transformations. In this paper, the mAP metric equal to 30.5 is used.
In [15], improvements of R-MAC such as MR (Multi-Resolution), SMAC (sum and max activation of convolution) and URA (unsupervised regional attention) are considered. This work shows state-of-the-art results with the mAP of 31.0 % and NAR of 0.028.
As can be seen from the articles listed above, only CNN-generated features and ways to improve their quality are mainly investigated. Local features are practically not used. At the same time, the promising architecture - ViT [16] has not yet been fully tested. Since the ViT architecture has already been applied to image retrieval issues, we believe it is also reasonable to test its performance in trademark retrieval. It will also be useful to study the influence of different pre- and post-processing techniques on the features extracted with this architecture and their joint work with local features.
3. Proposed approach
In this section, we present a pipeline for solving the problem of searching for similar logos. The essence of our approach is to apply local and global features to improve the search quality. A schematic of the pipeline is shown in Figure 3. Each step is numbered, and the elements inside the blocks represent the possible implementation of the steps. Next, we describe in detail the goals of each stage and the possible options for their implementation.
Step 1: Pre-processing. Pre-processing, and in particular the scaling of the image to a certain size, is an important step in the search for similar images because it is at this stage we set the constraints with which our system will have to work. Image scaling will inevitably lead to loss of information, but we can minimize the negative effect.
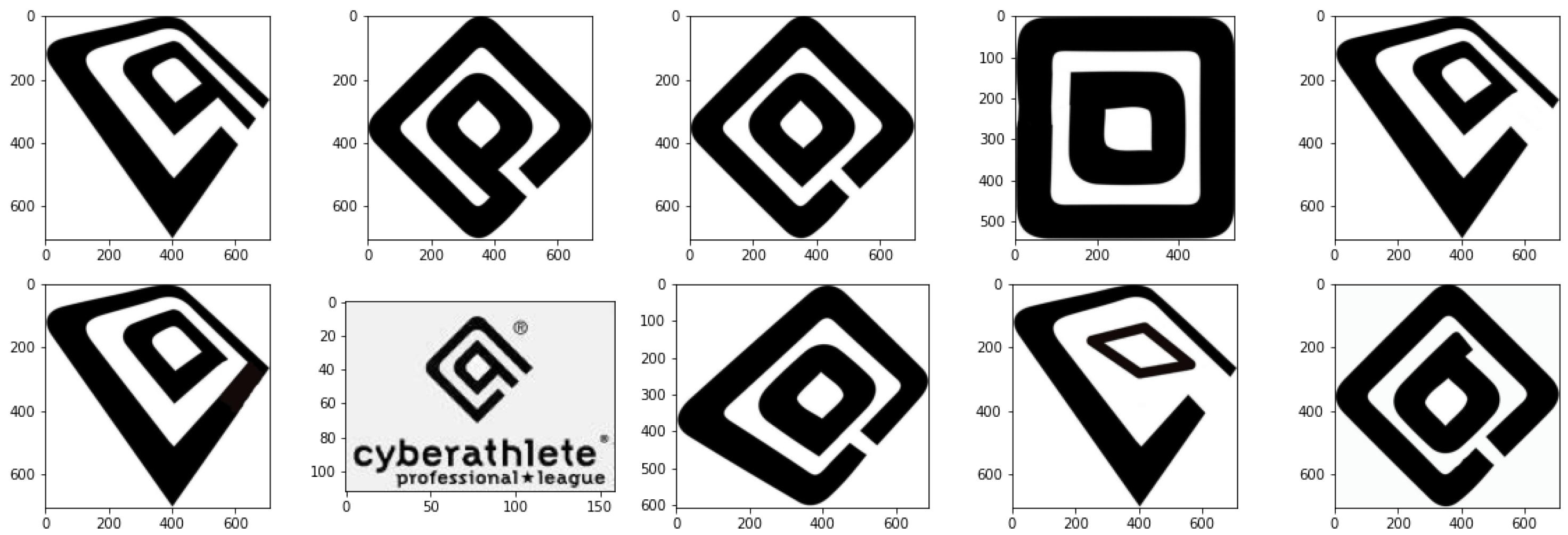
Image scaling is needed because most neural networks are trained for image classification and work effectively only on images with a certain size – the size of images used in the training phase. The most commonly used image size is 224×224. There are several ways to scale the image to this size, see Figure 2:
- Scaling to 224x224 without preserving the aspect ratio (Resize(224x224)).
- Scaling to 256 with the aspect ratio preserved, then cropping out a 224x224 square from the center of the image (Resize(256) + CenterCrop(224x224)).
- Scaling to 224x224 with the aspect ratio preserved, black bars appear (Resize(224x224) with borders).
Figure 2.
Examples of image scaling
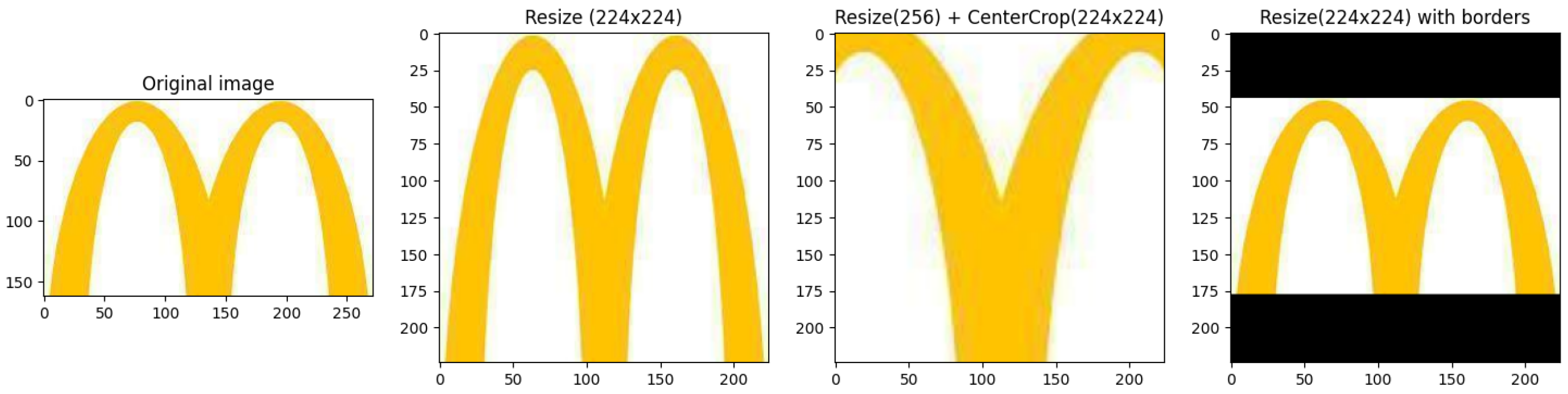
Each method has its disadvantages:
- Resize(256) + CenterCrop(224x224) is a standard transformation used in classification. Its disadvantage is that part of the image is cropped, and thus information is lost.
- Resize(224x224) loses aspect ratio information, which makes the image look very different visually.
- Resize(224x224) with borders preserves the aspect ratio information but reduces the effective resolution.
After scaling is applied, the images are normalized using the mean and standard deviation of the dataset on which the training occurred. The images are then fed to the feature extraction stage.
Figure 3.
Pipeline overview
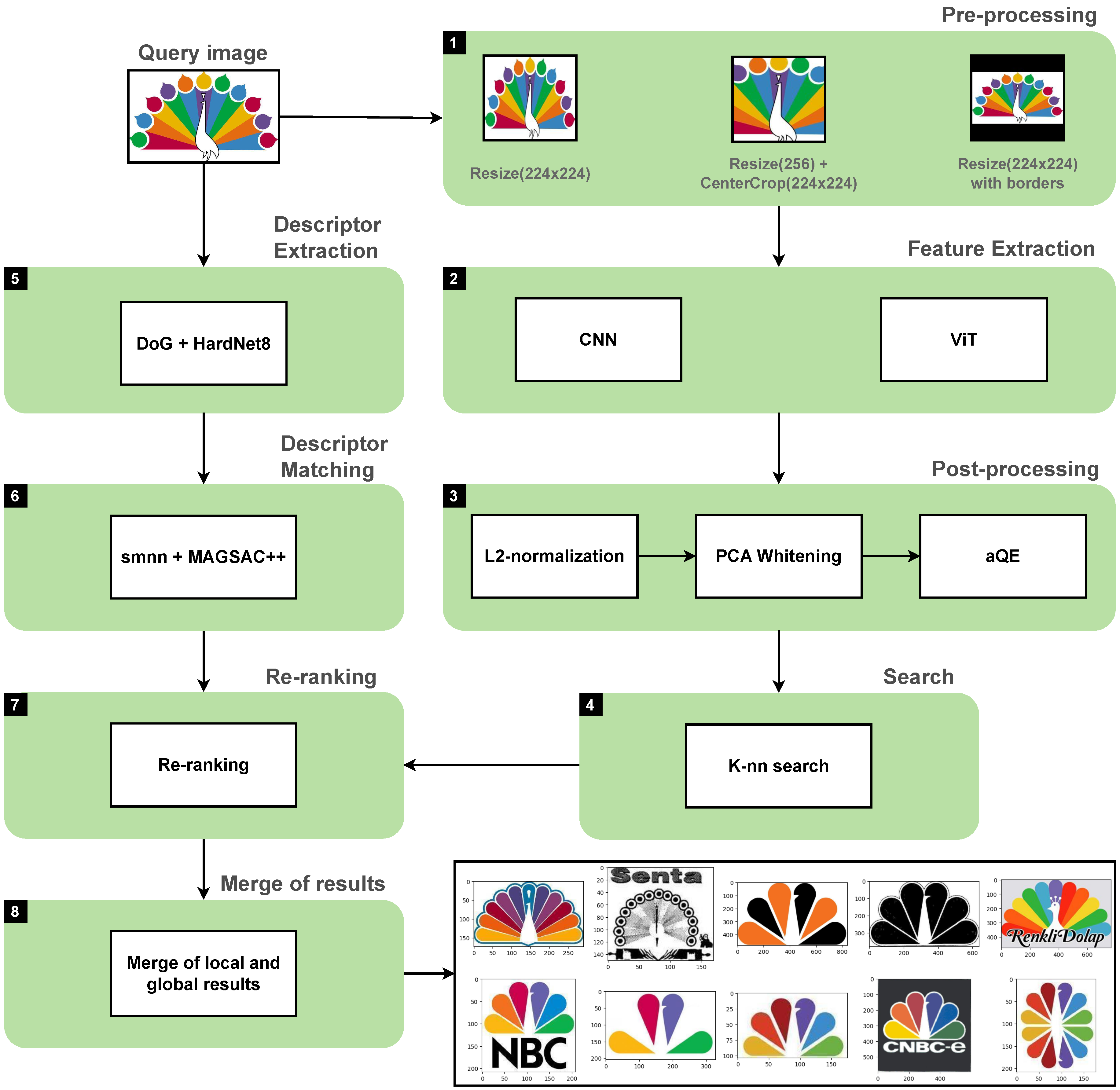
Step 2. Feature extraction. Global features are features that describe the entire image. Global features can summarize the entire image with a single vector describing color, texture, or shape. Examples of classical global features are GIST, LBP, and others. In [17], it was first observed that features extracted by CNNs trained on image classification datasets are good candidates for most visual recognition tasks, including finding similar images.
In this paper, we extract features using two architectures: CNN and ViT. The features were extracted for CNN-based networks using Global Max Pooling from the last Conv layer. For ViT, a CLS token was used. After feature extraction, post-processing takes place.
Step 3. Post-processing. Various techniques can be used to post-process the features obtained with neural networks to improve the quality of search results. In contrast to pre-processing, the techniques described below can be applied simultaneously in order of numbering. The proposed approach uses L2-normalization, PCA whitening and QE. Let’s take a closer look at them.
L2-normalization is a common technique for normalizing feature vectors. This technique divides each feature vector element by its L2-norm, which results in a unit vector of length 1. It reduces the effect of the feature vector’s magnitude and improves the features’ stability against changes in the image.
Query expansion (QE) is a process of reformulating a search query to improve search accuracy. Its essence is to use the information obtained from the primary search to modify the vector by which the search is conducted.
For the task of image retrieval, there are several methods of QE, such as AQE (Average Query Expansion) [18], QE (-weighted query expansion) [11] and others. AQE is based on averaging the features of the top-ranked images in the original search and using the averaged feature for a new query, while QE uses weighted averaging. Thus, when , QE becomes equivalent to AQE.
Step 4. Search. After all post-processing stages, the resulting features are used to search for similar images. In the previous studies, a direct relationship between the similarity of vector representations of images and their visual similarity was found. Moreover, the closer the numerical values of the vectors of two images are to each other, the more likely these images will have similar visual characteristics. Therefore, in this paper, we use K-NN (K nearest neighbors) search to obtain a list of k best-fitting candidates. To measure the distance between vectors, we apply the distance metric L2, which allows us to determine the Euclidean distance between two vectors in n-dimensional space.
Step 5. Descriptor Extraction. Local features describe local parts of the image, neighborhoods of keypoints. Key points (keypoints) are special points or areas in the image with unique visual characteristics and relative invariance to changes in scale, orientation, illumination, and other affine transformations. A detector is used to find key points, and a descriptor is used to describe them. By comparing the keypoint descriptors, we can find out how similar the local parts of different images are. This step uses a combination of the DoG detector and the HardNet8 descriptor, which has been shown to be successful in a number of works, e.g., in [19].
Step 6. Descriptor Matching. Descriptor matching is the process of finding the closest keypoint descriptors. SMNN (second mutual nearest neighbors) is used for descriptor matching. We also use RANSAC to filter outliers. In this paper, we use MAGSAC++ [20]. After this step, we get a list of candidates sorted by the number of inliers. In step 8, we will describe the merge of search results obtained using local and global features.
Step 7. Re-ranking. The results obtained with global features are re-ranked with local features. We use the same methods to extract and compare descriptors as in steps 5 and 6 and obtain the number of inliers. Then we calculate the re-ranking score using the following formula:
Where distance is L2 distance, e is a small number to prevent division by zero, inliners is a number of inliners, and are weights. The output is a ranked list of candidates, which is combined with local search results in the next step.
Step 8. Merge of results. The main disadvantage of the global feature approach is its inability to pay attention to smaller parts of the image. For example, even if an element is exactly the same as another but is not the main element in the image, it will be far to the bottom of the ranked list. To overcome this issue, we combine local and global search results. To combine the two search results, we use the following equation to calculate the final score:
If the candidate is not on one of the lists, the score for this parameter is zero. In the next section, we will consider the effect of the steps in our pipeline on the quality of the search for similar logos.
4. Experimental evaluation
In this section, we consider the effect of pre-processing and post-processing on the features generated by the CNN and ViT architecture models, as well as the results of using local features for re-ranking and joint usage of global and local features.
Table 1 and Table 2 show the tested models of two architectures: CNN and ViT. They also indicate on which dataset pre-training was performed. CNN models are represented by ResNet [21]. ViT models are represented by ViT [16] and BEiT [22].

Table 1.
CNN Models
| Model name | Pre-training Dataset |
|---|---|
| Resnet18_in1k | ResNet18 pre-trained on ImageNet-1K |
| Resnet50_in1k | ResNet50 pre-trained on ImageNet-1K |
| resnetv2_50x1_bitm_in21k | ResNet50V2 pre-trained on ImageNet-21K |
Table 2.
ViT Models
| Model name | Pre-training Dataset |
|---|---|
| ViT B/16 in 1k | ViT B/16 pre-trained on ImageNet-1K |
| ViT B/16 in 21k | ViT B/16 pre-trained on ImageNet-21K |
| BEiT ViT B/16 in 21k | BEiT ViT B/16 pre-trained on ImageNet-21K |
The tests were performed on the METU Trademark Dataset [17], which is the largest dataset for the trademark retrieval task. It has two main sets: the query set and the test set. The test set is unlabeled and contains more than 900000 images. The query set contains 417 trademark images that belong to 35 different classes, some examples are shown in Figure 4 and Figure 5. For the evaluation, the query set is injected into the test set.
Figure 4.
Example of dataset samples
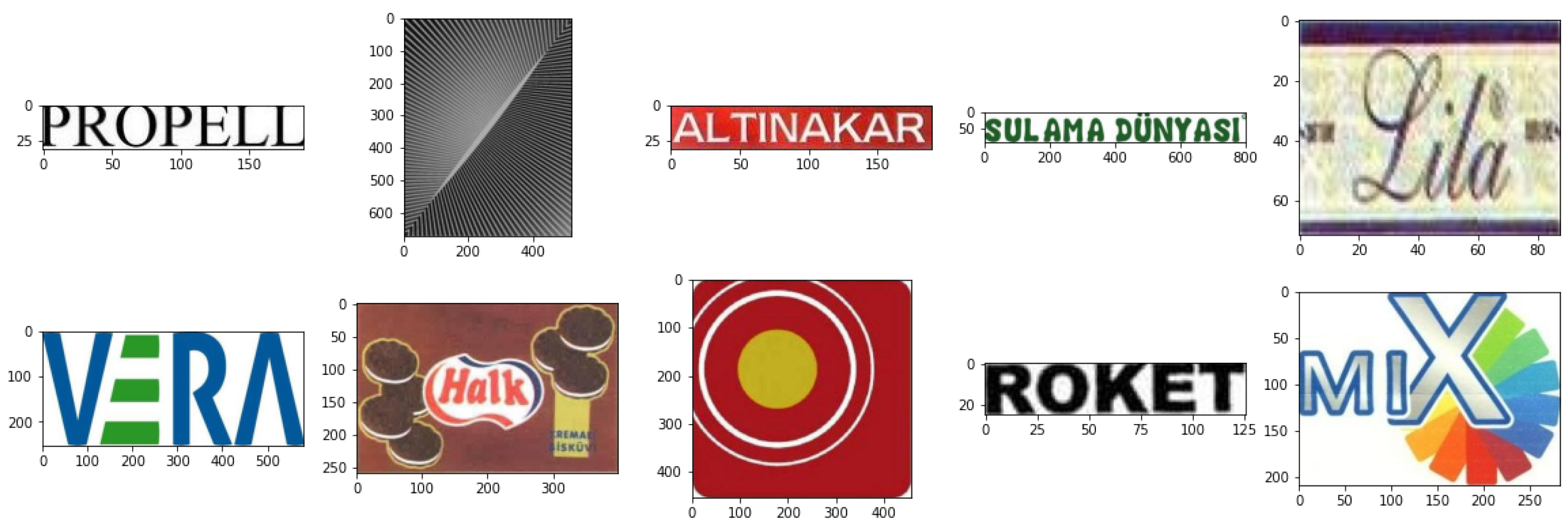
Figure 5.
Example of similar trademarks from query set
All experiments were conducted on a PC with Intel Core i5-9600 processor, 32 GB DDR4 RAM, and NVIDIA GeForce RTX 2060 SUPER graphics card. For the evaluation, we also used mAP value:
It’s calculated by using top k retrieved results, where k is 100. And AP@k is the average precision at k. Table 3 and Figure 6 show the mean average precision of CNN and ViT-based models using various resizing techniques without post-processing steps.
Table 3.
Mean average precision of CNN and ViT-based models
| Neural network | Dimensions | Resizing technique | mAP@100 |
|---|---|---|---|
| Resnet18_in1k | 512 | Resize(256) + CenterCrop(224x224) | 11.05 |
| Resize(224x224) | 12.23 | ||
| Resize(224x224) with borders | 11.25 | ||
| Resnet50_in1k | 2048 | Resize(256) + CenterCrop(224x224) | 11.55 |
| Resize(224x224) | 13.19 | ||
| Resize(224x224) with borders | 13.62 | ||
| resnetv2_50x1_bitm_in21k | 2048 | Resize(256) + CenterCrop(224x224) | 14.02 |
| Resize(224x224) | 14.93 | ||
| Resize(224x224) with borders | 15.17 | ||
| ViT B/16 in 1k | 768 | Resize(256) + CenterCrop(224x224) | 7.44 |
| Resize(224x224) | 8.30 | ||
| Resize(224x224) with borders | 7.35 | ||
| ViT B/16 in 21k | 768 | Resize(256) + CenterCrop(224x224) | 14.65 |
| Resize(224x224) | 15.97 | ||
| Resize(224x224) with borders | 16.83 | ||
| BEiT ViT B/16 in 21k | 768 | Resize(256) + CenterCrop(224x224) | 18.01 |
| Resize(224x224) | 19.63 | ||
| Resize(224x224) with borders | 20.19 |
From the results of the experiments, we can draw several conclusions. Versions of neural networks pre-trained on larger datasets show greater mAP.
All models, except resnet18_in_1k and ViT B/16 in 1k, have the highest mAP when using Resize(224x224) with borders. This shows that the aspect ratio information lost with other types of Resize can be used by neural networks for more accurate search results.
ViT architecture loses to CNN architecture when pre-trained on small datasets (ImageNet 1K) but wins when pre-trained on larger datasets (ImageNet 21K). This shows that with increasing dataset size, ViT features become more useful in solving the problem of searching for similar logos.
Table 4 shows the results of applying PCAw to resnetv2_50x1_bitm_in21k and BEiT ViT B/16 in 21k, respectively, the best CNN-based and ViT-based models. The resizing technique used – Resize(224x224) with borders. We can see that PCAw positively impacted the mAP value and benefited the ViT-based model more than the CNN-based model.
Figure 7 shows the impact of aQE on the performance of BEiT ViT B/16 in 21k + PCAw. The best result of 28.46 is achieved with alpha = 0.5 and n=4, which is slightly better than AQE (alpha=0).
Figure 6.
Mean average precision of CNN and ViT-based models
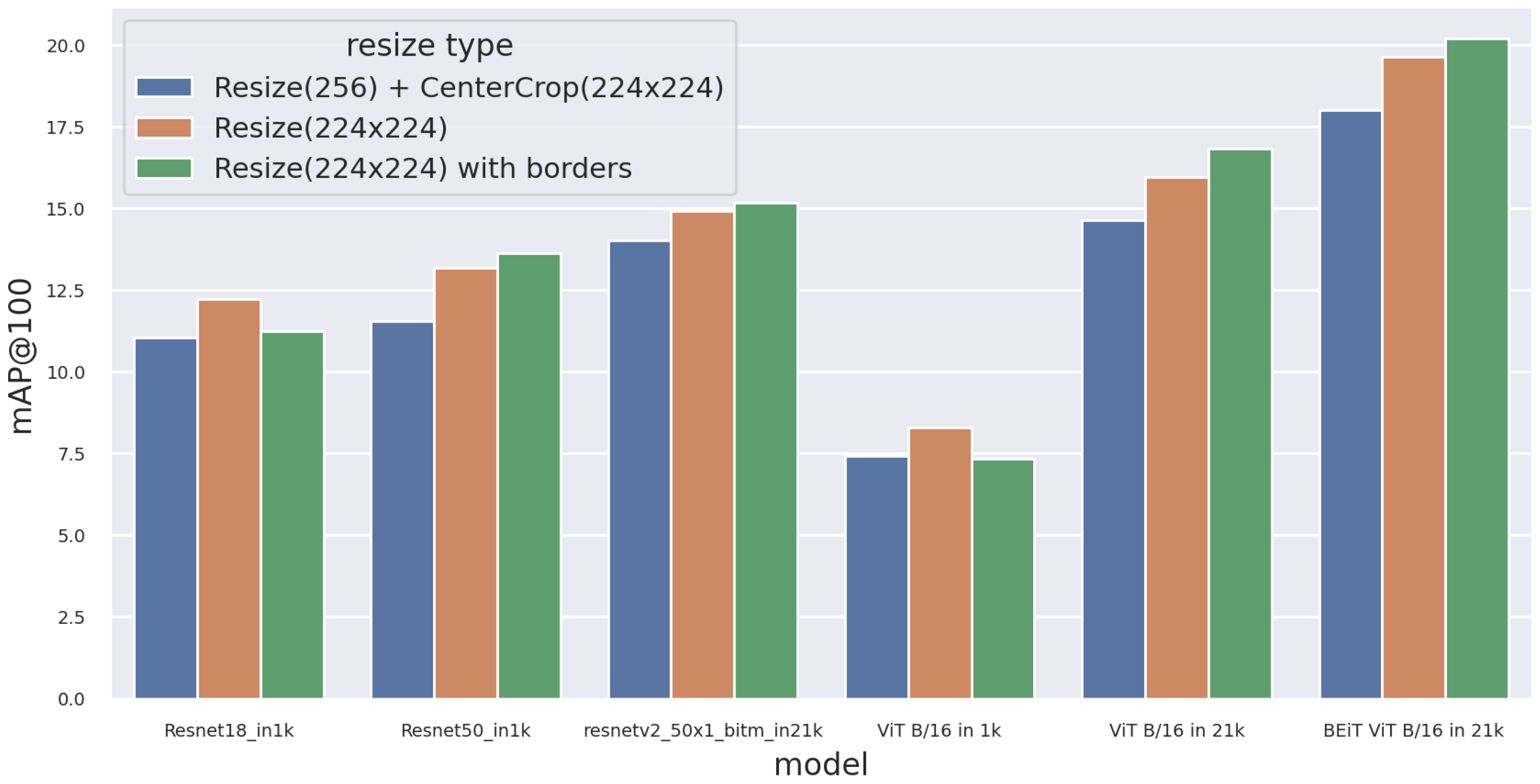
Table 4.
Results of applying PCAw
| Neural network | mAP@100 before applying PCAw |
mAP@100 after applying PCAw |
|---|---|---|
| resnetv2_50x1_bitm_in21k | 15.17 | 18.50 |
| BEiT ViT B/16 in 21k | 20.19 | 25.12 |
Figure 7.
Impact of aQE on the mAP value
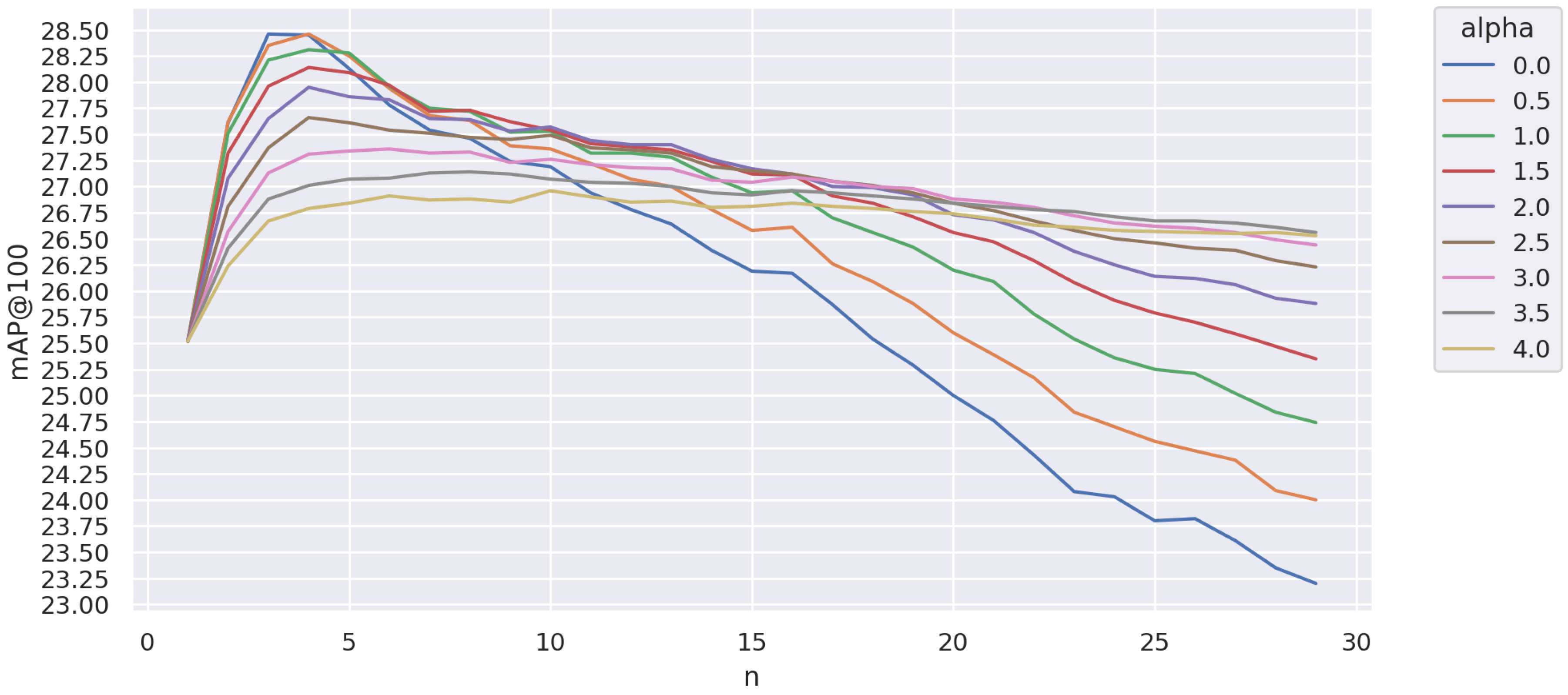
Table 5 shows the cumulative effect of post-processing and local features on the mAP value. The usage of pcaW gave the greatest increase in search accuracy.
Table 6 presents a comparison of our approach with other works. Our approach is slightly ahead of the current state-of-the-art result shown by MR-R-SMAC w/URA.
Experimental results show that ViT networks pre-trained on large datasets can show better results than CNNs, and they do not require specialized Pooling layers. We can significantly increase search accuracy using efficient pre- and post-processing. Using local features improves search results, suggesting that off-the-shelf features extracted by neural networks can still be improved.
Table 5.
Cumulative effect of post-processing and local features on the mAP value
| Method | mAP@100 |
|---|---|
| BEiT ViT B/16 in 21k | 20.19 |
| BEiT ViT B/16 in 21k +pcaW | 25.12 |
| BEiT ViT B/16 in 21k +pcaW+aQE | 28.46 |
| BEiT ViT B/16 in 21k +pcaW+aQE+reranking | 30.62 |
| BEiT ViT B/16 in 21k +pcaW+aQE+reranking + local_features | 31.23 |
5. Discussion
Despite the combined use of global and local features and advanced architectures like ViT and modern descriptors like HardNet8, the results still need to be better.
As a result of the tests, we have identified some issues that our method faces. Figure 8 shows examples of searches where yellow frames show images similar to the searched image but absent from the test dataset, and red frames show false positives.
Figure 8.
Examples of searches

While analyzing the results, we noticed that the system can find images that seem similar but are not in the test set of the METU Trademark dataset. The test set should be extended. The presence of text on a logo significantly degrades search results for several reasons. With the global features, we are not yet able to distinguish the “important” and “unimportant” parts of the image because, as shown in Fig. 10, the search results contain pictures with a similar layout or similar font but don’t take into account a similar geometric element of the logo. Also interesting is that in some cases, the difference in distance between similar and dissimilar images is minimal, indicating that it is quite difficult to distinguish between similar and dissimilar images with the current features.
A similar issue is observed with local features. The text in the image receives a lot of keypoints, due to which there may be cases of false positives, as the letters are similar to each other, i.e., local features find images with similar text font.
These ussues can be solved as follows: it is necessary to perform fine-tuning of the neural network, with which the global features are extracted, and limit the number of keypoints in the area around the text in the image.
6. Conclusion
In this paper, we have presented an approach for searching for similar logos and performed exhaustive testing of all its steps. We found that for similar logos searching, the best type of image scaling is scaling with aspect ratio preservation. Despite the decreased effective resolution, neural networks benefit from retaining information about the original image – proportions. For the BEiT model, the gain was 2.1 % mAP. A comparison of the features extracted from ViT and CNN-based models was performed, and many interesting properties were found: ViT-based models are inferior to CNN-based models when pre-trained on the smaller dataset (imagenet-1k) but start to win with the increasing dataset. The difference between the best CNN and ViT models, without post-processing, is 5 % mAP. It was also concluded that PCA whitening works not only on features derived from CNN models but also on models based on Vision Transformers, with ViT having a higher mAP gain than CNN (3.3 % for ResnetV2 and 4.9 % for BEiT). When optimal parameters are chosen, aQE can perform better than AQE. A further 3.3 % gain was achieved with aQE. This paper demonstrates the use of joint global and local features. Local features have been used twice: for re-ranking results obtained with global features and merging local and global results. This has further improved the search quality, reaching the mAP value of 31.23 %.
In future work, we plan to study metric learning for training models based on the Vision Transformer and deeper integration of local and global features. Also it is planned to implement this approach as a digital forensics tool as a part of data analysis services of the International Digital Forensics Center [23].
Author Contributions
Conceptualization, D.V., D.L. and A.C.; methodology, D.V., D.L., A.C.; software, D.V.; validation, D.V., D.L. and A.C.; formal analysis, D.L., A.C.; investigation, D.V., A.C.; resources, D.V.; data curation, A.C.; writing—original draft preparation, D.V.; writing—review and editing, D.L.. A.C.; visualization, D.V., D.L.; supervision, A.C.; project administration, A.C.; funding acquisition, A.C. All authors have read and agreed to the published version of the manuscript.
Funding
The study was supported by the grant of the Russian Science Foundation No. 21-71-20078,
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
No new data were created or analyzed in this study. Data sharing is not applicable to this article.
Conflicts of Interest
The authors declare no conflict of interest.
Abbreviations
The following abbreviations are used in this manuscript:
| ViT | Vision transformer |
| CNN | Convolutional neural network |
| CBIR | Content-based image retrieval |
| mAP | Mean average precision |
| NAR | Normalized average rank |
| MR | Multi-resolution |
| SMAC | Sum and max activation of convolution |
| URA | Unsupervised regional attention |
| AQE | Average query expansion |
| QE | -weighted query expansion |
| K-NN | K nearest neighbors |
| SMNN | Second mutual nearest neighbors |
References
- Organization, W.I.P. World Intellectual Property Indicators 2021. https://www.wipo.int/edocs/pubdocs/en/wipo_pub_941_2021.pdf, 2021. Online: accessed 31.05.2023.
- Tursun, O.; Aker, C.; Kalkan, S. A large-scale dataset and benchmark for similar trademark retrieval. arXiv preprint 2017, arXiv:1701.05766 2017. [Google Scholar]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. Imagenet classification with deep convolutional neural networks. Communications of the ACM 2017, 60, 84–90. [Google Scholar] [CrossRef]
- Szegedy, C.; Liu, W.; Jia, Y.; Sermanet, P.; Reed, S.; Anguelov, D.; Erhan, D.; Vanhoucke, V.; Rabinovich, A. Going deeper with convolutions. Proceedings of the IEEE conference on computer vision and pattern recognition, 2015, pp. 1–9.
- Simonyan, K.; Zisserman, A. Very deep convolutional networks for large-scale image recognition. arXiv preprint 2014, arXiv:1409.1556 2014. [Google Scholar]
- others. Russakovsky, O.; Deng, J.; Su, H.; Krause, J.; Satheesh, S.; Ma, S.; Huang, Z.; Karpathy, A.; Khosla, A.; Bernstein, M.; others. Imagenet large scale visual recognition challenge. International journal of computer vision 2015, 115, 211–252. [Google Scholar]
- Perez, C.A.; Estévez, P.A.; Galdames, F.J.; Schulz, D.A.; Perez, J.P.; Bastías, D.; Vilar, D.R. Trademark image retrieval using a combination of deep convolutional neural networks. 2018 International Joint Conference on Neural Networks (IJCNN). IEEE, 2018, pp. 1–7.
- Babenko, A.; Lempitsky, V. Aggregating local deep features for image retrieval. Proceedings of the IEEE international conference on computer vision, 2015, pp. 1269–127.
- Kalantidis, Y.; Mellina, C.; Osindero, S. Cross-dimensional weighting for aggregated deep convolutional features. Computer Vision–ECCV 2016 Workshops: Amsterdam, The Netherlands, October 8-10 and 15-16, 2016, Proceedings, Part I 14. Springer, 2016, pp. 685–701. 8 October.
- Tolias, G.; Sicre, R.; Jégou, H. Particular object retrieval with integral max-pooling of CNN activations. arXiv preprint 2015, arXiv:1511.05879 2015. [Google Scholar]
- Radenović, F.; Tolias, G.; Chum, O. Fine-tuning CNN image retrieval with no human annotation. IEEE transactions on pattern analysis and machine intelligence 2018, 41, 1655–1668. [Google Scholar] [CrossRef] [PubMed]
- Tursun, O.; Denman, S.; Sivapalan, S.; Sridharan, S.; Fookes, C.; Mau, S. Component-based attention for large-scale trademark retrieval. IEEE Transactions on Information Forensics and Security 2019, 17, 2350–2363. [Google Scholar] [CrossRef]
- Cao, J.; Huang, Y.; Dai, Q.; Ling, W.K. Unsupervised trademark retrieval method based on attention mechanism. Sensors 2021, 21, 1894. [Google Scholar] [CrossRef] [PubMed]
- Tursun, O.; Denman, S.; Sridharan, S.; Fookes, C. Learning test-time augmentation for content-based image retrieval. Computer Vision and Image Understanding 2022, 222, 103494. [Google Scholar] [CrossRef]
- Tursun, O.; Denman, S.; Sridharan, S.; Fookes, C. Learning regional attention over multi-resolution deep convolutional features for trademark retrieval. 2021 IEEE International Conference on Image Processing (ICIP). IEEE, 2021, pp. 2393–2397.
- Dosovitskiy, A.; Beyer, L.; Kolesnikov, A.; Weissenborn, D.; Zhai, X.; Unterthiner, T.; Dehghani, M.; Minderer, M.; Heigold, G.; Gelly, S.; others. An image is worth 16x16 words: Transformers for image recognition at scale. arXiv preprint 2020, arXiv:2010.11929 2020.
- Sharif Razavian, A.; Azizpour, H.; Sullivan, J.; Carlsson, S. CNN features off-the-shelf: an astounding baseline for recognition. Proceedings of the IEEE conference on computer vision and pattern recognition workshops, 2014, pp. 806–813.
- Chum, O.; Philbin, J.; Sivic, J.; Isard, M.; Zisserman, A. Total recall: Automatic query expansion with a generative feature model for object retrieval. 2007 IEEE 11th International Conference on Computer Vision. IEEE, 2007, pp. 1–8.
- Jin, Y.; Mishkin, D.; Mishchuk, A.; Matas, J.; Fua, P.; Yi, K.M.; Trulls, E. Image matching across wide baselines: From paper to practice. International Journal of Computer Vision 2021, 129, 517–547. [Google Scholar]
- Barath, D.; Noskova, J.; Ivashechkin, M.; Matas, J. MAGSAC++, a fast, reliable and accurate robust estimator. Proceedings of the IEEE/CVF conference on computer vision and pattern recognition, 2020, pp. 1304–1312.
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. Proceedings of the IEEE conference on computer vision and pattern recognition, 2016, pp. 770–778.
- Bao, H.; Dong, L.; Piao, S.; Wei, F. Beit: Bert pre-training of image transformers. arXiv preprint 2021, arXiv:2106.08254 2021. [Google Scholar]
- Kotenko, I.; Kalameyets, M.; Chechulin, A.; Chevalier, Y. A visual analytics approach for the cyber forensics based on different views of the network traffic. Journal of Wireless Mobile Networks, Ubiquitous Computing, and Dependable Applications 2018, 9, 57–73. [Google Scholar]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



