
Submitted:
03 June 2023
Posted:
05 June 2023
You are already at the latest version
Abstract
In this paper, we first establish upper stochastic bounds on the lifetime of a used cold
standby system with arbitrary age, using the likelihood ratio order and the usual stochastic order.
Then, stochastic comparisons are made between the lifetime of a used cold standby system with
age t and the lifetime of a cold standby system consisting of used components with age t using the
likelihood ratio order and the usual stochastic order. We use illustrative examples to explore the
results presented.
Keywords:
likelihood ratio order
; usual stochastic order
; cold-standby system
; log-concave
; logconvex
; lifetime
1. Introduction and Preliminaries
Cold standby systems are backup systems that are not ready for use until they are needed. In other words, they are kept on standby but not actively operated. This type of backup system is commonly used in situations where the primary system has a long lifetime and is unlikely to fail frequently (see, e.g., Kumar and Agarwal [17], Kou and Zuo [18], Yang [31], and Peng et al. [22]). Reliability analysis of cold standby systems involves evaluating the probability of failure of the primary system and the time required to switch to the backup system. The reliability of the primary system is determined by analyzing its failure rate, while the reliability of the backup system is determined by analyzing its startup time and the probability of failure during startup. In the context of replacement strategies and related optimization problems, cold standby systems have been used repeatedly in the literature (see, e.g., Coit [7], Yu et al. [32], Jia and Wu [13], Xing et al. [30], and Ram et al. [24]).
Several methods can be used to analyze the reliability of cold standby systems, including fault tree analysis, reliability block diagrams, and Markov models. These methods allow engineers to identify potential failure modes, estimate the probability of system failure, and evaluate the effectiveness of backup systems. The study of the reliability of complex systems using cold standby systems has been conducted by many researchers for engineering problems (See, for example, Azaron et al. [3], Wang et al. [28], Wang et al. [29], and Behboudi et al. [5]).
Stochastic comparisons between the random lifetimes of various complex systems have been a subject of increasing interest among engineers and system designers. This enables them to have, for example, an optimization problem to solve and, consequently, a plan to prepare a product with greater reliability. The theory of stochastic orderings in applied probability has been recently utilized to compare the lifetime of coherent systems equipped by cold-standby units from a stochastic point of view (cf. Boland and El-Neweihi [6], Li et al. [19], Eryilmaz [8], Eryilmaz [9], Roy and Gupta [26] and Roy and Gupta [25]).
However, stochastic comparisons of lifetimes of general cold-standby systems with an arbitrary age, have not been considered in the literature thus far. As will be clarified in the sequel, the lifetime of a component in a system with additional cold-standby spares is the sum of random variables, thus, in this regard, a few studies may be found in Zhao and Balakrishnan [33], Amiri et al. [2], Khaledi and Amiri [16] and Amiripour et al. [1] among others.
In the current study, we develop some stochastic ordering results using the well-known usual stochastic order and the likelihood ratio order, involving the lifetime of a used cold-standby system with an arbitrary age, and provide some bounds for the rf of the lifetime of such a system. The rf of the lifetime of a cold-standby system with used components of the age t, is used to provide upper bound and lower bound for the rf of the used cold-standby system with age t.
In the sequel we will use some notations. Let be a random vector and be a vector of observations as a realization of . Denote and with . Consider the cold standby system consisting of n components. Initially, one component starts working and the other components are in cold standby mode. When the working component fails, the components in standby mode are replaced one by one until all components have failed and the cold standby system fails. The cold standby system means that the components do not fail or degrade in standby mode and that the standby period does not affect the life of the components in future use. When the failed component is replaced by the standby component, the switch is absolutely reliable and transmission is instantaneous. Let be the lifetimes of the n components with cumulative distribution functions and corresponding reliability functions . We also assume are independent. Then, the lifetime of the cold standby system is
The rf or the survival function (SF) of the lifetime of the cold standby system given in (1), is
where * represents the convolution operator. It is known that when and , for are independent, then where is the probability density function (pdf) of , which is the rf of the convolution of and , i.e. the rf of . Thus, from (2), we can write
We will need some other preliminaries in the continuing part of the paper. Suppose that X is the lifetime of a fresh item as its life span. We may need to recognize the distribution of the lifetime of that item at the age t. The random variable , which is called the residual lifetime of an item with original life length X at the time t provided that the item is already alive at this time, is ordinarily utilized to represent and model the lifetime of a used component or item. Let X have pdf (whenever it exists) and rf . Then, has pdf
and it has rf
which are valid as The mean residual lifetime (MRL) function of X is given by
Stochastic ordering of distributions have been a useful tool for statisticians in the context of testing statistical hypothesises. Two well-know stochastic order will be used throughout this paper. The following definition can be found in Shaked and Shanthikumar [27].
Definition 1.
Let X and Y be two non-negative random variables with pdfs and , and refs and , respectively. Then it is said that X is smaller or equal than Y in the
(i) likelihood ratio order (denoted by ) whenever is non-decreasing in .
(ii) usual stochastic order (denoted by ) whenever for all .
The stochastic orders in Definition 1 are connected to each other as it has been proved that implies (see, e.g., Shaked and Shanthikumar [27]). Nonparametric classes of life distributions are usually based on the pattern of aging in some sense. For example by comparing with for as two time points according to the likelihood ratio order, new patterns of aging are produced. The common parametric families of life distributions also feature monotone aging. In this context, the following definition is also applied in the paper.
Definition 2.
The random variable X with pdf is said to have
(i) Increasing likelihood ratio property (denoted as ) whenever is log-concave in .
(ii) Decreasing likelihood ratio property (denoted as ) whenever is log-convex in .
For example the exponential distribution has both and properties. The gamma distribution with shape parameter and scale parameter has property if and it has property if . For recognizing and properties in further well-known distributions we refer the readers to Bagnoli and Bergstrom [4]. The following definition is due to Karlin [14].
Definition 3.
Suppose that is a non-negative function for all and for all . Then, it is said that is totally positive of order 2 (denoted as ) in , whenever for all and for all
According to Definition 3, by using the convention that for any , then is in in the desired subset of , i.e. over the set if and only if, is non-decreasing in , or equivalently if, is non-decreasing in .
2. Stochastic Bounds for the Lifetime of a Used Standby System
Let us consider independent and non-negative rvs , and denote by the corresponding conditional rvs, so that , for all for which . Note that for the random vector , the conditional rv is a vector-valued rv whose joint distribution is equal with conditional join distribution of Ẕ give , where A is a subset of for which . The rv has pdf
Consider, now, the vector which, since ’s are independent, it has joint cdf
Note that the ith marginal distribution of is the distribution of provided that are independent. We can find that for any function ,
where is a vector with size n and is the joint reliability function of . We will utilize Note that is equal in distribution with the conditional rv , where . The following lemma will be used in the sequel.
Lemma 4.
Let be a random vector, having joint pdf . Consider as a random vector with joint pdf
Then, , where means equality in distribution.
Proof.
It is sufficient to show that for all . We can write
On the other hand, from (24), we obtain
in which . Thus, we proved the desired identity and, hence, the result follows. □
The following result indicates that the lifetime of a used standby system of age t with n components is dominated in the sense of the usual stochastic order by the lifetime of a standby system composed of used components plus . Denote by which is valid for all for which and note that is the random lifetime of the ith component in the standby system, with . Denote
where is a vector with n components and . Notice that the marginal distribution of the ith random element in corresponds with the distribution of , , provided that are independent.
Theorem 5.
Let be independent rvs which are non-negative and be also independent, for a fixed . Then:
Proof.
For , the result is trivial. Let us assume . From Lemma 4, they can be founds rvs and with joint pdf
in which such that . From (9), since and are independent, has pdf
Then:
It is clear that is decreasing in , thus, Since implies , thus
By Equation (9), the conditional pdf of given is derived as:
For any we show that is decreasing in , as . We have
which is decreasing in Therefore, . Hence,
From Equations (10) and (11), using Theorem 6.B.3 in Shaked and Shanthikumar [27], one gets:
It is easily verified that holds, if and only if, . So, i.e., (13) holds when . Finally, we prove the result by induction. Suppose that for it holds that . From preservation property of under a change in location of distributions, we have:
From (12), since for the result was proved, thus an application of Theorem 1.A.3(b) in Shaked and Shanthikumar [27] yields:
Equivalently, one can write: . Hence, the proof is obtained. □
In the context of Theorem 5 one may realize that, if in (13), , then becomes . Using Theorem 5, an upper bound for the mean residual lifetime (MRL) function of a standby system can be provided. Since implies the expectation order, thus, from Theorem 5,
where is the MRL function of a standby system with independent component lifetimes , and is the MRL function of for . The bound provided for the MRL function of a standby system is valuable because the MRL function of the system which depends on the distribution of convolution of n rvs, which has no closed form in many situation, does not have an explicit formula. The rv X has a gamma distribution with the shape parameter and the scale parameter whenever X has density (denote it by ). Let us suppose that under consideration is a standby system with independent heterogenous exponential component lifetimes , so that has mean (), where . It is known that , however, the as the random lifetime of the standby system, has a gamma distribution () with an indefinite MRL function. However,
In the following example, the result of Theorem 5 is applied.
Example 6.
Suppose that and are two independent random variables and assume that and are also independent. Note that and . Consider a two-units standby system. Using Theorem 5, an upper bound for the rf of the used standby system with age is derived. Specifically, it is shown that
Since it is trivial that for all one has , thus for all , . Therefore, it is enough to show that for all . It is seen that for
On the other hand, for all , we can get
in which the rf of is acquired as
and, similarly, the rf of is obtained as
and, consequently,
In Figure 1, the graph of SFs of and is plotted, which makes it clear that for , when .
In the sequel of this section, the result of Theorem 5 is strengthened to the case where the likelihood ratio order is used. However, in this case, the random lifetimes of the components need to to have log-concave density functions which means that the components lifetimes have to fulfill the ILR property. We first give the following technical lemmas. The proof of the following lemmas, being straightforward, are omitted.
Lemma 7.
Suppose that Y and Z are two rvs with pdfs and respectively. The following assertions hold:
(a) If Y has support and Z has support so that then, if, and only if, is non-decreasing in .
(b) If , then for .
Lemma 8.
The following assertions hold true:
(a) For any non-negative rv W, for all for which , it holds that where and
(b) For all for which it holds that .
Theorem 9.
Let be non-negative independent rvs which are all , and suppose that are independent, for a fixed . Then:
Proof.
Fix . Firstly, we prove that
in which and with . Since and , thus by Lemma 7 it is enough to show that is non-decreasing in s for all . One has
Denote , and similarly, . Therefore, for all
where
Thus, from Eq. (14), one can write
where and is an rv with pdf
Since for all thus from Theorem 1.C.53 in Shaked and Shanthikumar [27], we deduce that for all . Hence, for all which validates that
for all . From 16, we can write , in which
and . Since is , thus is in It is also plain to see that is also in Hence, as the product of two functions in a common domain is itself another function, thus is also in From Lemma 3 in Kayid and Alshagrawi [15], is in This reveals that for all and consequently,
On the other hand, since , by Theorem 2.10 in Izadkhah et al. [12], the rv having weighted distribution with respect to with the weight function which is log-concave in x, for all , is also . Now, by Theorem 1.C.9 of Shaked and Shanthikumar [27], since for all , thus That is
So, from (18), is also non-decreasing in In view of (17) and Eq. (15), it follows that is non-decreasing in . Therefore, we demonstrate it that which by Lemma 8(b) it further implies that . By applying Lemma 7, by choosing one gets which by Lemma 8(a) yields The proof is completed. □
3. Comparison of a Used Standby System with a Standby System Composed of Used Components
In this section, we make stochastic comparisons between lifetimes of a used standby system with age t and another standby system composed of used components each has age t. We establish that when the ones of the n component lifetime distribution have a general density function (with absolutely continuous distribution) and the nth component is exponentially distributed, then the standby system with used components is more reliable and has smaller risk than the used standby system.
Theorem 10.
Let be independent non-negative rvs with pdfs , respectively, so that
for a fixed , in which and and that follows exponential distribution with parameter . Suppose that where are also independent rvs. Then:
where and
Proof.
We prove that is non-decreasing in . Let us write
Hence, it suffices to prove that
By changing the variable y into in the numerator in (22) one has
where , and is an rv with support having pdf
Note that, since thus for all we have:
Therefore, for all
Notice that is in , which means that for all and, consequently, for all . This is enough together with the non-parenthetical part of Lemma 2.2(i) in Misra and van der Meulen (2003) to obtain for all which fulfills (22) as a correct statement and, thus, the stochastic order relation given is (21) stands valid. □
The following example of a single unit system equipped with a cold-standby unit which has an exponential lifetime distribution, fulfills the result of Theorem 10.
Example 11.
Let we have a cold-standby system with size heterogenous components with lifetimes and so that has an arbitrary lifetime distribution () and has an exponential lifetime distribution with parameter and we, further, assume that and are independent. Then, since
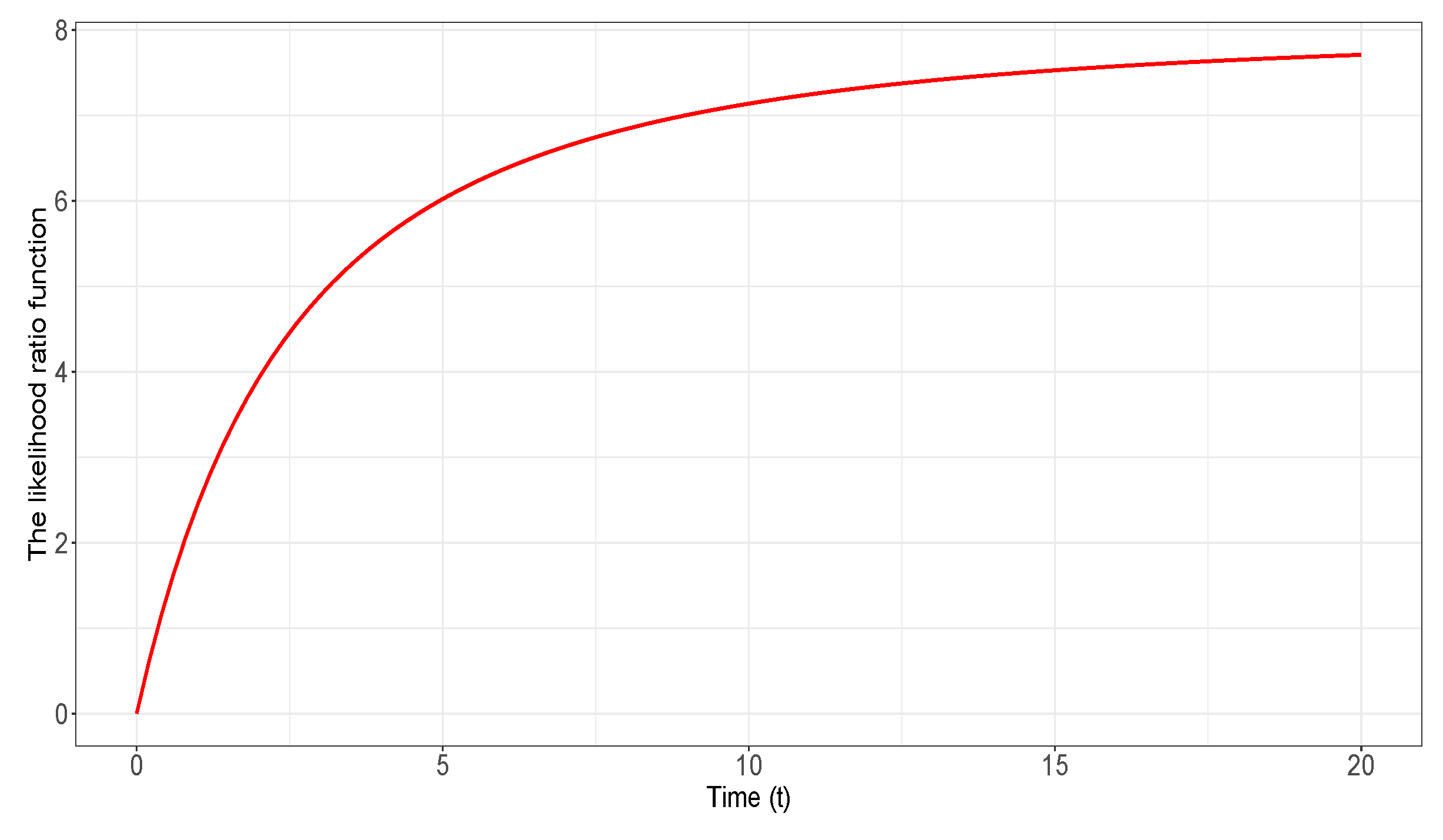
thus the likelihood ratio ordering in Equation (20) holds true for , and hence by Theorem 10, one concludes , for all . Let us suppose that has a gamma distribution with and and has exponential distribution with as the age is chosen. By routine calculation, for all one has
In Figure 2, we plot the graph of the function given by
The function is increasing with respect to according to Theorem 10 as Figure 2 confirms it.
Now, we prove another result to compare the lifetime of a used standby system with the lifetime of another system composed of used components with respect to the usual stochastic order. The following lemma is essential to our development.
Lemma 12.
Let be a random vector with non-negative random components with joint pdf . Fix . Let be another random vector with joint pdf
where . Then, , where is an rv with pdf .
Proof.
We show that and have the same cdf. It is notable that for any function one has
For all , one one hand we can derive
On the other hand, for all , one has
The proof of the result is complete. □
We introduce some notation before stating the result. Let be the density of the rv Z which is differentiable. The function is well-known as the Glaser’s eta function which is very useful in the study of the shape of the hazard rate function and the mean residual life function (see, e.g., Glaser [10] and Gupta and Viles [11]).
Theorem 13.
Let be independent rvs which are non-negative whose densities are differentiable and be also independent, for a fixed . Then if there exists an such that
- (i)
- for all
- (ii)
- is increasing in
- (iii)
- for every and for all
we have
Proof.
Under the assumption (i), it is found that is decreasing in Thus from Theorem 3.2.(a) of Misra et al. [21] , , and, therefore, . Suppose now that . Note that the assumption (ii) is equivalent to being a log-concave function in . By Lemma 12 and the Equation (24), there exist non-negative rvs and with joint pdf
so that By 27, since and are independent, thus follow pdf
where is the normalizing constant. Suppose that is an rv with pdf for every . We can then write
in which is the normalizing constant. This ratio is decreasing in since is a log-concave function in . This is equivalent to saying that and therefore,
Once again, in spirit of (27), given that the conditional pdf of is derived as
For any fixed the log-concavity of in , implies that is decreasing in ; that is Thus,
Now, taking into accounts the ordering relations in (28) and (29) and using Theorem 6.B.3 in Shaked and Shanthikumar [27], we get where for every . We use the induction method and assume that
holds true for i.e., . From known properties of the usual stochastic order
which means that (30) stands valid for . Thus, we proved that . Since the assumption (iii) means that is decreasing in , thus an application of Theorem 3.2.(a) of Misra et al. [21] implies that so for all . Note that where is the residual lifetime after age . From Theorem 1.A.3.(b) in Shaked and Shanthikumar [27] it follows that . Hence, the result is proved. □
The next example clarifies that the property that a standby system composed of used components has a greater reliability than a used standby system is fulfilled in the context of lifetime components distribution.
Example 14.
We consider components with heterogenous independent lifetime distributions. Suppose that . Note that as are independent rvs, consequently, , thus . We assume that for all and that . Therefore,
For all it is seen that
Thus, the assumption (i) in Theorem 13 holds true. It is further observed that which is an increasing function in , that is, the assumption (ii) in Theorem 13 is satisfied. Since , for all , thus the assumption (iii) in Theorem 13 is also valid, and consequently, .
4. Concluding Remarks
With this work we have achieved two goals. The first is to develop some stochastic upper bounds on the random lifetime of a cold standby system that is not fresh or new and has age t, having been in operation and still functioning by time t. Two well-known stochastic orders, namely the likelihood ratio order and a weaker stochastic order, the usual stochastic order, were applied to obtain the stochastic upper bound. The interesting point is that the reliability function of the lifetime of the used cold standby system with n units is always dominated (without any further assumptions) by the reliability function of the lifetime of a cold standby system with units consisting of used components with common age t, provided that the lifetimes of the used components are shifted t times, as is the case, for example, in the burn-in process. For example, may be the case in the burn-in process, where a product is put into use for a time interval of length t before being handed over to the customer, is a realistic situation. However, the domination of this stochastic upper bound over the lifetime of the cold standby system used in terms of the likelihood ratio order requires the further assumption that the components have the property. The second objective was to find conditions under which the lifetime of a used cold standby system with an age of t is dominated by the lifetime of a cold standby unit with used components, each with an age of t, in terms of the likelihood ratio order and the usual stochastic order. In general, and as confirmed by our research as a whole, it is found that the use of cold standby units that were previously in use for an equally long period of time (e.g., t) is preferable to a used cold standby system with age t because it satisfies larger stochastic lifetimes. Therefore, a cold standby system with components that has random lifetime is more reliable than a used cold standby system with random lifetime in most situations. We hope that the research conducted in this study will be useful to engineers and system designers.
In the future study, we will use the hazard rate order and the reversed hazard rate order to determine new bounds on the reliability function and the cumulative distribution function, respectively, of a second-hand cold standby system. We will look for conditions under which the lifetime of a used cold standby system of age t is dominated by the lifetime of a cold standby unit with used components each of age t, in terms of new stochastic orders. Stochastic comparisons between the inactivity times of cold standby systems according to known standard stochastic orders are another problem that can be studied in future work. The importance of the loss caused by further inactivity of engineering systems may motivate us to conduct the above study to design an optimal cold standby unit with less stochastic inactivity.
Author Contributions
Conceptualization, L.A. and M.K.; methodology, M.K.; software, L.A.; validation, M.K.; formal analysis, M.K.; investigation, L.A.; resources, L.A. and M.K.; writing—original draft preparation, L.A.; writing—review and editing, M.K.; visualization, M.K.; supervision, M.K.; project administration, M.K.; funding acquisition, M.K. All authors have read and agreed to the published version of the manuscript.
Funding
This research is funded by Researchers Supporting Project number (RSP2023R392), King Saud University, Riyadh, Saudi Arabia.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Acknowledgments
The authors acknowledge financial support from the Researchers Supporting Project number (RSP2023R392), King Saud University, Riyadh, Saudi Arabia.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Amiripour, F.; Khaledi, B.E.; Shaked, M. Stochastic orderings of convolution residuals. Metrika 2013, 76, 559–576. [Google Scholar] [CrossRef]
- Amiri, L.; Khaledi, B.E.; Samaniego, F.J. On skewness and dispersion among convolutions of independent gamma random variables. Probability in the Engineering and Informational Sciences 2011, 25, 55–69. [Google Scholar] [CrossRef]
- Azaron, A.; Perkgoz, C.; Katagiri, H.; Kato, K.; Sakawa, M. Multi-objective reliability optimization for dissimilar-unit cold-standby systems using a genetic algorithm. Computers and Operations Research 2009, 36, 1562–1571. [Google Scholar] [CrossRef]
- Bagnoli, M.; Bergstrom, T. Log-concave probability and its applications. In Rationality and Equilibrium: A Symposium in Honor of Marcel K. Richter; Springer: Berlin, Heidelberg, 2006; pp. 217–241. [Google Scholar]
- Behboudi, Z.; Borzadaran, G.M.; Asadi, M. Reliability modeling of two-unit cold standby systems: a periodic switching approach. Applied Mathematical Modelling 2021, 92, 176–195. [Google Scholar] [CrossRef]
- Boland, P.J.; El-Neweihi, E. Component redundancy vs system redundancy in the hazard rate ordering. IEEE Transactions on Reliability 1995, 44, 614–619. [Google Scholar] [CrossRef]
- Coit, D.W. Cold-standby redundancy optimization for nonrepairable systems. Iie Transactions 2001, 33, 471–478. [Google Scholar] [CrossRef]
- Eryilmaz, S. On the mean residual life of a k-out-of-n: G system with a single cold standby component. European Journal of Operational Research 2012, 222, 273–277. [Google Scholar] [CrossRef]
- Eryilmaz, S. The effectiveness of adding cold standby redundancy to a coherent system at system and component levels. Reliability Engineering and System Safety 2017, 165, 331–335. [Google Scholar] [CrossRef]
- Glaser, R.E. Bathtub and related failure rate characterizations. Journal of the American Statistical Association 1980, 75, 667–672. [Google Scholar] [CrossRef]
- Gupta, R.C.; Viles, W. Roller-coaster failure rates and mean residual life functions with application to the extended generalized inverse Gaussian model. Probability in the Engineering and Informational Sciences 2011, 25, 103–118. [Google Scholar] [CrossRef]
- Izadkhah, S.; Rezaei, A.H.; Amini, M.; Mohtashami Borzadaran, G.R. A general approach for preservation of some aging classes under weighting. Communications in Statistics-Theory and Methods 2013, 42, 1899–1909. [Google Scholar] [CrossRef]
- Jia, J.; Wu, S. Optimizing replacement policy for a cold-standby system with waiting repair times. Applied Mathematics and Computation 2009, 214, 133–141. [Google Scholar] [CrossRef]
- Karlin, S. (1968). Total positivity (Vol. 1). Stanford University Press.
- Kayid, M.; Alshagrawi, L. Reliability aspects in a dynamic time-to-failure degradation-based model. Proceedings of the Institution of Mechanical Engineers, Part O: Journal of Risk and Reliability 2022, 236, 968–980. [Google Scholar] [CrossRef]
- Khaledi, B.E.; Amiri, L. On the mean residual life order of convolutions of independent uniform random variables. Journal of statistical planning and inference 2011, 141, 3716–3724. [Google Scholar] [CrossRef]
- Kumar, A.; Agarwal, M. A review of standby redundant systems. IEEE Transactions on Reliability 1980, 29, 290–294. [Google Scholar] [CrossRef]
- Kuo, W.; Zuo, M.J. (2003). Optimal reliability modeling: principles and applications. John Wiley and Sons.
- Li, X.; Zhang, Z.; Wu, Y. Some new results involving general standby systems. Applied Stochastic Models in Business and Industry 2009, 25, 632–642. [Google Scholar] [CrossRef]
- Lu, C.J.; Meeker, W.O. Using degradation measures to estimate a time-to-failure distribution. Technometrics 1993, 35, 161–174. [Google Scholar] [CrossRef]
- Misra, N.; Gupta, N.; Dhariyal, I.D. Preservation of some aging properties and stochastic orders by weighted distributions. Communications in Statistics–Theory and Methods 2008, 37, 627–644. [Google Scholar] [CrossRef]
- Peng, R.Z.; Zhai, Q.; Yang, J. (2022). Reliability Modelling And Optimization Of Warm Standby Systems. Springer Verlag, Singapor.
- Pham, H. (Ed.) (2011). Safety and risk modeling and its applications. London: Springer.
- Ram, M.; Singh, S.B.; Singh, V.V. Stochastic analysis of a standby system with waiting repair strategy. IEEE Transactions on Systems, man, and cybernetics: Systems 2013, 43, 698–707. [Google Scholar] [CrossRef]
- Roy, A.; Gupta, N. Reliability function of k-out-of-n system equipped with two cold standby components. Communications in Statistics-Theory and Methods 2021, 50, 5759–5778. [Google Scholar] [CrossRef]
- Roy, A.; Gupta, N. Reliability of a coherent system equipped with two cold standby components. Metrika 2020, 83, 677–697. [Google Scholar] [CrossRef]
- Shaked, M.; Shanthikumar, J.G. (Eds.) (2007). Stochastic orders. New York, NY: Springer New York.
- Wang, C.; Xing, L.; Amari, S.V. A fast approximation method for reliability analysis of cold-standby systems. Reliability Engineering and System Safety 2012, 106, 119–126. [Google Scholar] [CrossRef]
- Wang, W.; Xiong, J.; Xie, M. A study of interval analysis for cold-standby system reliability optimization under parameter uncertainty. Computers and Industrial Engineering 2016, 97, 93–100. [Google Scholar] [CrossRef]
- Xing, L.; Tannous, O.; Dugan, J.B. Reliability analysis of nonrepairable cold-standby systems using sequential binary decision diagrams. IEEE Transactions on Systems, Man, and Cybernetics-Part A: Systems and Humans 2011, 42, 715–726. [Google Scholar] [CrossRef]
- Yang, G. (2007). Life cycle reliability engineering. John Wiley and Sons.
- Yu, H.; Yalaoui, F.; Châtelet, Ė.; Chu, C. Optimal design of a maintainable cold-standby system. Reliability Engineering and System Safety 2007, 92, 85–91. [Google Scholar] [CrossRef]
- Zhao, P.; Balakrishnan, N. Mean residual life order of convolutions of heterogeneous exponential random variables. Journal of Multivariate Analysis 2009, 100, 1792–1801. [Google Scholar] [CrossRef]
Figure 1.
Plot of the survival function of (solid line) and the survival function of (dot-dashed line) for and for
Figure 1.
Plot of the survival function of (solid line) and the survival function of (dot-dashed line) for and for
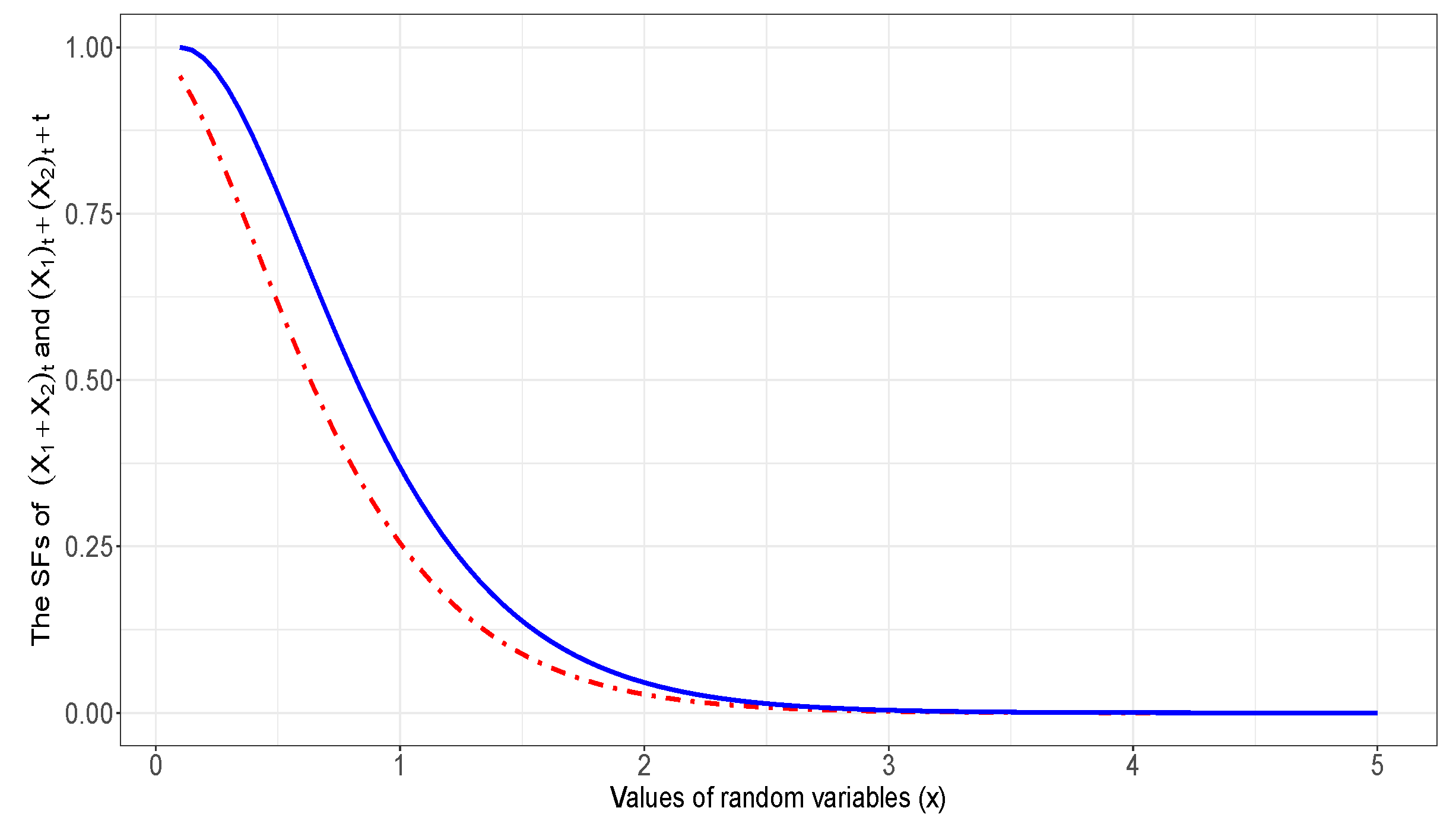
Figure 2.
Plot of the likelihood ratio for
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



