Submitted:
12 June 2023
Posted:
12 June 2023
You are already at the latest version
Abstract
High efficiency and safety are critical factors in ensuring optimal performance and reliability of systems and equipment across various industries. Fault Monitoring (FM) techniques play a pivotal role in this regard by continuously monitoring system performance and identifying the presence of faults or abnormalities. However, traditional FM methods face limitations in fully capturing the complex interactions within a system and providing real-time monitoring capabilities. To overcome these challenges, Digital Twin (DT) technology has emerged as a promising solution to enhance existing FM practices. By creating a virtual replica or digital copy of a physical equipment or system, DT offers the potential to revolutionize fault monitoring approaches. This paper aims to explore and discuss the diverse range of predictive methods utilized in DT and their implementations in FM across industries. Furthermore, it will showcase successful implementations of DT in FM across a wide array of industries, including manufacturing, energy, transportation, and healthcare The utilization of DT in FM enables a comprehensive understanding of system behavior and performance by leveraging real-time data, advanced analytics, and machine learning algorithms. By integrating physical and virtual components, DT facilitates the monitoring and prediction of faults, providing valuable insights into the system’s health and enabling proactive maintenance and decision-making.
Keywords:
3D printing
; nozzle clogging
; machine learning
; smart monitoring
1. Introduction
Fault Monitoring (FM) is a process that involves the detection and diagnosis of faults as soon as they occur caused by various events such as equipment faults, process faults, etc, through the continuous monitoring of a system [1]. This process is crucial to ensure the quality, efficiency, and safety of manufacturing processes, transportation, power plants, and other complex systems [2]. These complex systems have many interconnected components that are prone to malfunction or fail due to component degradation, which can lead to safety risks, costly downtime, a decrease in productivity, and other negative impacts [3]. The objective of FM is to detect issues promptly, enabling operators to carry out repairs and maintenance work proactively, before the system being monitored sustains damage or experiences downtime. Furthermore, its objective extends to provide more accurate information for the optimization of machine operation [4]. Analysis of device logs and system performance metrics, running diagnostic tests, and event correlation are examples of methods employed in FM operations. The method to be used in an operation will vary from system to system and what issues are most expected to occur.
Traditionally, FM involves using physical elements, including sensors, instrumentation, and manual inspection by machine operators responsible for collecting and analyzing data [5]. These elements can provide relevant data about the system’s behavior and performance, but they have several limitations. For instance, they may need help capturing the subtle and complex interactions of the components in the system; they may not provide real-time monitoring and analysis; and they may be resource-intensive and costly to implement and maintain. To overcome these challenges, Advanced Fault Monitoring Systems (AFMS) including but not limited to: condition-based monitoring [6], predictive maintenance [7], prognostics and health management [8], and internet-of-things-based monitoring [9], have been developed that can automatically detect and diagnose faults in complex systems. These monitoring systems utilize combinations of various technologies such as data analytics, artificial intelligence, computer vision, control systems, etc, for the pattern identification that indicates the presence of a fault in real-time and massive data set analysis, which ensures a high-level of precision and accuracy in capturing the interactions between components of the system and thus has an edge over traditional FM approaches. Currently, the use of digital twins is emerging as a promising technology for FM.
Digital Twins are digital counterparts of physical entities such as equipment and systems, that are supplied with real-time data, that can span from its atomic to geometric level which can enable a more holistic approach to understanding and optimizing the performance of these physical entities [10]. Digital Twin (DT) aims to integrate concepts of simulation, twinning, data analytics, optimization, and monitoring into a single technology. The objective of DT technology is to perform simulations on the virtual counterpart in the same manner as tests will be conducted on the physical counterpart which can provide a comprehensive and detailed view of the system’s behavior and performance that can help identify the subtle faults that traditional monitoring methods may miss [11]. For instance, DTs can continuously collect real-time information on the temperature, pressure, vibration, and other metrics of a component or system through various sensors, and be analyzed to detect and diagnose faults that can occur and consequently facilitate corrective action before failure [12]. This can help minimize the risk of complete system failure, and costly repairs, and reduce the downtime experienced due to equipment maintenance. This can be particularly useful in cases where the physical entity is located remotely or is difficult to access or where real-time monitoring could be more practical [13]. In spite of these advantages of using DT technology for FM, there are still challenges to be overcome, and consequently, the opportunity to improve this technology in this application.
In using DT technology for FM, accurate model construction in terms of the technical characteristics, complex processes, performance when subjected to interference, etc. it highly vital, to make it as parallel as possible to its physical counterpart [14]. In this necessity arises one of the current challenges of DT technology for FM, as it requires extensive data and knowledge of the physical device/system which can be tedious and tremendously complex. Another challenge is regular data collection requirement from sensors present in the system and continuously update and maintain the DT’s model and algorithms as the system continuously change over time, which can be resource-intensive. Finally, the data security concern in DT technology, as it involves accumulating and processing sensitive data from the systems, can be daunting; thus, organizations must have the right tools, processes, and personnel to manage their digital twin environments effectively.
Thus, this paper presents an overview of DT architecture, approaches, and data monitoring types for DT in FM, and aims to summarize and synthesize the essential findings and contributions of the research of this technology (DT) in FM applications to identify the main themes, trends and highlight the most promising directions for future research. Finally, a discussion on the technology’s current challenges and opportunities for improvement.
2. Methodology
A comprehensive review of the research work within the last 5 years on DT technology for FM was gathered from online databases including IEEE Xplor and Google Scholar. The papers were searched using keywords such as "digital twin", "fault monitoring", "fault diagnosis" and "condition monitoring". Only journal articles related to DT in FM were selected, papers concerning the overview of DT technologies were excluded during the filtering process. We reviewed a total of 59 articles and papers, of which 35 were selected for inclusion in this review based on their relevance to the topic. Seen on Table 1 the list of DT in FM papers categorized by publication years. Majority of the research papers within the point of interest were published in 2022, followed by 2021.

Table 1.
List of Digital Twin Applied to Fault Monitoring Papers
| Year of Publication | DT in FM | Publications |
|---|---|---|
| 2022 | 17 | [15,16,17,18,19,20,21,22,23,24,25,26,27,28,29,30,31] |
| 2021 | 30 | [32,33,34,35,36,37,38,39,40,41,42,43,44,45,46,47,48,49,50,51,52,53,54,55,56,57,58,59,60,61] |
| 2020 | 6 | [62,63,64,65,66,67] |
| 2019 | 4 | [68,69,70,71] |
| 2018 | 2 | [72,73] |
| Total | 59 |
This study only looked at publications from 2018 to 2022. Table 1 indicates that only two relevant results were obtained for 2018 publications, four for 2019 publications, and six for 2020 publications. Therefore, it can be inferred that 2019 and 2020 are the years when the research interest in digital twin-based fault monitoring started to pick up.Among the publication years considered in this survey, 2022 and 2021 have the highest publication count, with 17 and 30 publications respectively. It shows from the data that DT-based FM gained traction in 2021, and 2018 is the approximate starting point of research in the field. The decrease in published work in 2022 could be that the topic has already been explored to a significant extent that there are less findings or novel ideas to be reported.
This paper begins by providing a brief overview of DT technology and its potential applications in FM. The methodology used for our literature review, including the databases and search terms, is then described. The main body of the paper presents the key findings of the research articles reviewed, organizing them into themes and trends. Finally, the paper concludes by summarizing the key findings and discussing implications to future research.
In this section, a comprehensive review of the research work within the last 5 years on digital twin technology for fault monitoring. We searched online databases such as Google Scholar and IEEE Xplore using keywords such as "digital twin", "fault monitoring", and "condition monitoring".
3. Digital Twin Architecture
DT technology has gained considerable interest in recent years as a promising approach for fault monitoring in various industries, including manufacturing, transportation, and energy. A DT is an ultra-realistic digital model that mirrors the dynamic and static attributes from data of the physical asset that are always in sync with one another, wherein simulations can be run with the DT to examine the performance of the physical asset [74]. Furthermore, to consider a digital model to be a DT, needs to be designed with three attributes; (1) the ability to synchronize with the real-time functionality of its physical equivalent, (2) the capability to perform simulations and (3) active data acquisition. Once these three attributes are met and the DT is integrated with artificial intelligence, it offers an autonomous system that allows continuous simulation of alternatives that will improve predictive maintenance, process optimization, etc. The DT is transmitted and executed on cyberspace (cloud resource) hence, even if the connection is momentarily lost with the physical asset (device, system, component, etc.), the previously known status will still be known [75]. Since the DT can be stored in the cloud, it also provides the functionality of sharing the structured model in a global context.
3.1. Layers of Digital Twin Architecture
A study on the integration of DT technology to a shop floor conveyor into the manufacturing control system by [76] presented that DT architecture, as seen in Figure 1, comprises the data, modeling, analysis, and application layers. The (i)data layer is responsible for collecting and storing data from various sources, such as sensors, Internet of Things (IoT) devices, and other systems that generate data. Which, included various sensors installed on the conveyor to collect data on the process parameters, such as speed, temperature, and vibration. Next, the (ii)modeling layer is the central area where the model creation and calibration occurs, where a virtual model of a physical counterpart or process is created using various modeling techniques, such as mathematical modeling, 3D modeling, or machine learning algorithms, and calibrated using the data collected by the sensors and validated using the actual measurements obtained from the conveyor. In the work of [76], a conveyor system that has various components, such as motors, belts, rollers, and sensors, and their interconnections, was made a dynamic model in the modeling layer. Then, the data collected is transmitted, processed, and analyzed from both data layer and modeling layer to the (iii)analysis layer where information is extracted by means of various data analysis techniques (machine learning, statistical analysis, data mining, etc) to identify patterns, correlations, or anomalies in the data. This layer covers activities that improve the performance and efficiency of a system through predictive maintenance, process optimization, or quality control. Lastly, the (iv)application layer provides interfaces and applications for users to interact with the digital twin, such as monitoring, control, or optimization. Which included a control algorithm that optimizes the conveyor system based on the virtual model and corresponding real-time data, and a user interface that enables operators to visualize the conveyor system, monitor the process parameters, and adjust the control settings, based on the presented DT technology integration by [76].
3.2. Digital Twin Prediction Methods
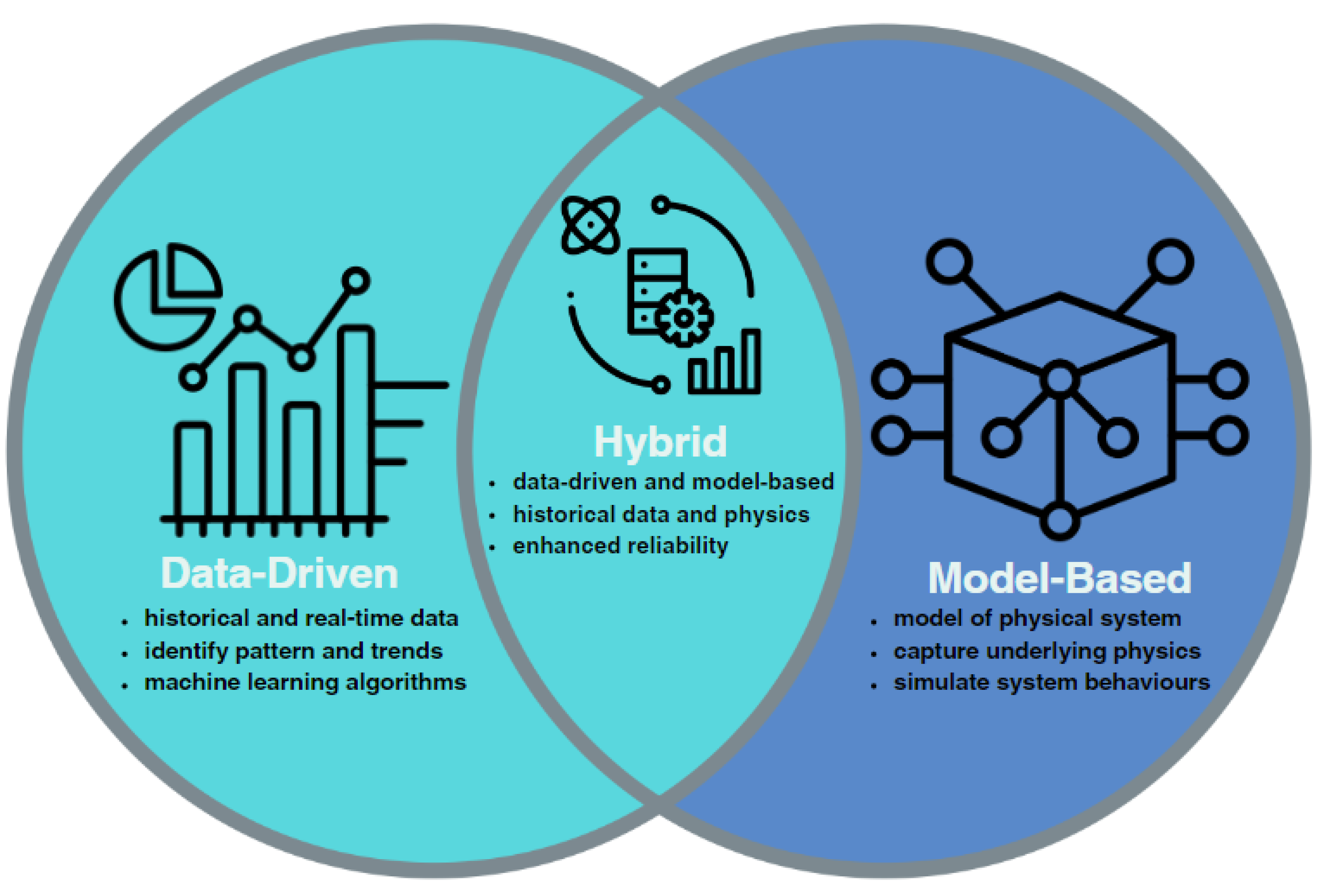
The general essence of DT is to detect any abnormal conditions in the physical asset before it reaches a malfunction or failure as all physical assets inevitably degrade over time, thus preventing various consequences (economic, environmental, workforce safety). To ensure the reliability of the physical asset, monitoring the results of predictive simulation from the initial stage of degradation will serve as a basis for subsequent maintenance [77]. According to [78], there exist three types of prediction methods: data-driven, model-based, and hybrid, which combine the two. Data-driven methods depend on either historical data alone and identify matching patterns or both real-time data and historical data, to estimate the future operating performance of a physical asset [79]. Further, an advantage of the data-driven method is all technical information regarding the equipment/system isn’t required to be generated, it only requires data from the many sensors to be analyzed, and the data structure would wholly depend on the user [80]. Artificial intelligence methods, statistical methods, and reliability functions are some methods utilized in the data-driven approach. For example, [45] proposed a data-driven DT fault diagnosis learning group, that evaluates the operational conditions of machining tools used in automotive applications through deep transfer learning. To sense the temperature of the sampling tool, a k-type thermocouple is integrated with a cloud data acquisition system over a WiFi module. The DDFD approach achieved 92.33% accuracy, better than DNN-Virtual [81] and DNN-Physical [82] models of which got an accuracy of 90.13% and 90.13%, respectively. [37] provides a data-driven approach to Smart Prognostics and Health Management (SPHM), of specifically a milling machine, using large amounts of data generated from shop floor devices for detecting the presence of a fault, the estimation of Remaining Useful Life (RUL), and highlights the need for a multi-faceted approach or framework with Prognostics and Health Management (PHM) which includes three phases: Setup and Data Acquisition, Data Preparation and Analysis, and SPHM Modeling and Evaluation. These three phases allow the understanding that predictive maintenance is a collection of methods (machine learning, deep learning, reliability, etc.) The SPHM framework’s effectiveness was proven in its fault detection and RUL estimation capabilities. As the data-driven method is heavily reliant on the operation data obtained by numerous sensors (a single sensor cannot detect all desired information) installed in a system, a drawback of this method arises on how sensors sometimes cannot be installed in specific areas or components of interest in the system which makes data acquisition difficult and hinders the creation of a holistic representation of the physical asset [83]. Model-based method, on the other hand, relies on mathematical models of a physical system that simulates its behavior which can be derived from either first principles or can be developed using data-driven techniques [84], and have its model parameters updated from measured data [85]. Furthermore, the model from this method reflects the performance of a system, with degradation dependent on its internal working mechanism, and represents all links between various components within the system [80] From this, the trend in performance degradation can be predicted. [51] presented a model-based simulation through 3D finite element method as the computational modeling technique, using parameters of both healthy and broken induction motors, and motor current signature analysis to determine the impact of fault presence within the motors. The outcomes were evaluated in both time and frequency domains, and an artificial neural network was employed to categorize the current health of the motor model. The authors suggested the possibility of creating a parameterized database of healthy and faulty motors which could be used to train fault diagnosis (FD) systems. According to [65], the model-based DT approach for FD can be a robust and cost-effective method that ensures the dependability and fault tolerance of systems specifically in Photovoltaic (PV) systems that uses a mathematical analysis, simulation study, and experimental validation. Their approach allows the real-time estimation of the outputs characteristic to a PV energy conversion unit (PVECU) and diagnoses faults by generating and evaluating an error residual vector, the difference between the estimated and measured outputs, which showed that the proposed approach is capable of detecting the presence of a fault and classifying the type of fault existing in the PVECU, with fault detection and identification times ranging from less than 290 (micro s) to less than 1.2s. This methodology illustrates greater fault sensitivity compared to existing approaches. The model-based method offers the users the freedom in simulating various scenarios with the operation of the system achieved through a myriad of data sheets, and information with individual components present in the system. A drawback of this method is its complexity and the technical experts to design and generate the model as accurately as possible [80]. Both approaches have their respective advantages and disadvantages which are often case-specific. Hence, the existence of a third method that fuses the two mentioned methods and adopts their advantages. The Hybrid-method combines first-principle and operation data. Based on [86], this method can be divided into three parts: data input, mechanism analysis, and data fitting. The mechanism analysis is deemed the most critical aspect of this approach since it embodies the operation of the model. Simply, the performance information is taken from the operation data (data-driven) and analyzed through a first-principle mechanism (model-based) before the hybrid modeling. This method was employed by [52] employed this approach to propose a solution that tackles the issue of intelligent instrument FD, which is gaining prominence in the field of manufacturing. The suggested system comprises of three layers: the data layer, control layer, and output layer. The data layer employs Micro-Electro-Mechanical Systems (MEMS) sensors and a Zigbee wireless transmission network to build a data connection between the physical endpoint and the virtual model. Their designed FD and prediction system for the indentation tested yielded an accuracy of 90%. These three methods of prediction have their own merits, the method most appropriate for a prognosis would depend on what the demands of the user would be.
4. Digital Twin in Fault Monitoring
The following literature review pertains to selected papers from different industries. It aims to outline the DT application in FM on equipment and system levels based on their relevance and contributions to the topic.
4.1. Equipment-Level Application
One of the main applications and a driver for the Industry 4.0 revolution is the PHM systems of various industrial components/equipment [87]. From here the equipment-level application of DT in different industries will be discussed. [49] discusses a novel implementation method that combines DT with the FD of large industrial equipment, focused on rolling bearings. The proposed framework was evaluated by comparing real-world and simulated fault signals of the rolling bearing giving information on the performance of the inner and outer race, using a sampling frequency of 12 kHz and 1750 rpm test speed. Pearson, Spearman, and Kendall statistical methods were used to compare the signals yielding a p-value < 0.05 indicating that the simulation signal significantly matches the real-world signal. While the study of [22] not only developed a technique for bearings but also concentrated on the diagnosis of crack types and sizes. This was achieved this by utilizing a combination of a strict-feedback backstepping DT and a machine learning algorithm. This approach involved designing a DT that will model and estimate acoustic emission signals, generate an acoustic emission residual signal, and using a support vector machine to classify the crack type and size. To test the efficiency of the proposed technique, the bearing dataset from the Ulsan Industrial Artificial Intelligence Laboratory was used which resulted in an average accuracy of 97.13% and 96.9% for crack type diagnosis and crack size diagnosis, respectively. For aviation, there is a significant difficulty in observing the status of an aircraft engine using traditional diagnosis methods. To aid in this difficulty, [18] proposes a hybrid FD method for the turbofan engine TFE-731 by which the status can be monitored online featuring its high suitability for on-time monitoring. The proposed method employs Fast Orthogonal Search (FOS) due to its superiority in time-frequency analysis and spectral estimation than the fast Fourier transform due to FOS’s capability in finding orthogonal bases, and the Autoregressive moving average (ARMA) model as it is widely used for the system output prediction of DTs and is able to predict the RUL of a valve of an aircraft engine. Practical implementation of the FOS-based ARMA data-driven approach resulting to a lower root mean square error and higher %variance accounted for (%VAF) of the FOS model, as compared with the results of the original model, validates its real-time effectiveness showing high prediction accuracy and stability, suggesting that the method can be utilized in examining the irregular parts of an aircraft engine. In contrast, [17] focuses on the sensor diagnostics and PHM of the Wärtsilä 9L50DF marine dual fuel engine. The paper presents an Engine Diagnostics System (EDS) that enables intelligent engine monitoring, advanced sensor fault detection, and timely corrective actions. The proposed Unified Digital System (UDS) integrates the EDS with the diagnostic and control system of the engine, combining a data-driven model with functional and thermodynamic approaches to comprehensively diagnose sensor abnormalities, faults, and failures. Results of the simulation show the effectiveness of the UDS concept, showing that it can capture engine sensor irregularities and restore engine operations to its original state by applying fitting corrective actions. For automotive, centered on Li-ion battery packs of electric vehicles, [57] used a holistic data pipeline to transfer information such as the State of Charge (SOC) and State of Health (SOH) by reverse-engineering the diagnostics interface of a 2014 e-Golf to query for Unified Diagnostic Services (UDS) messages containing both battery pack and cell-individual data. An On Board Diagnosis (OBD) logger was used to record the data with edge-processing capability, which was pushed into the cloud twin system using IoT technology. Battery models were fitted to the data, and cell individual internal resistance was inferred. State estimation of the battery was presented, and the data was coherent and relatively comparable to those from the literature. However, the confidence interval (CI) only amounted to 50%, and there is also a need for improvement in the reverse engineering of the battery as some of the internal resistance results had high variance requiring large sample amounts to establish statistically precise results.
Table 2.
Equipment Level DT in FM
| PY | Ref | Industry | Application | Prediction Method |
Proposed Algorithm |
Performance |
|---|---|---|---|---|---|---|
| 2021 | [49] | Manufacturing | Deep Groove Ball Bearing |
Data-Driven | Detail Parameter | r = 0.79, p <0.05 |
| 2021 | [22] | Industrial | Cylindrical Rolling Bearing |
Hybrid | Strict Feedback DT and ML |
Acc: 97.13% |
| 2021 | [18] | Aviation | Turbofan Engine | Hybrid | FOS-based ARMA | %VAF = 99.9% |
| 2022 | [17] | Maritime | Diesel Engine | Data-Driven | Unified Digital System |
%Error = 1.1% |
| 2022 | [57] | Automotive | Battery Packs | Hybrid | OBD Data to Cloud-based DT |
CI = 50% |
4.2. System-Level Application
In the domain of system-level applications, [26] provides a framework for integrating multiple data sources and modeling techniques to enable accurate diagnosis and prognosis of equipment faults in a factory setting. The networked proximity sensors collect real-time data from the factory floor. At the same time, the maintenance log data is used to construct a high-fidelity simulation of each piece of equipment using a data-tagging technique. This simulation is then used to determine fault relationships and train a DT model, which is integrated into a detailed DES model of the factory. The co-simulation approach is demonstrated in a case study of a manufacturing line, showing that it can accurately predict equipment failures and optimize maintenance schedules to reduce downtime and improve productivity. This approach will be used to train Bayesian Networks (BNs) as a Machine Learning (ML) suitable algorithm to represent multilevel faults of complex hierarchical system. Furthermore, BN allows the determination of how faults spread within and between different categories of faults, and a single model can function for both prediction and diagnostics purposes without requiring any additional training, and the model can also account for the related uncertainties. The implementation of SIA algorithm is also discussed which enables the detection of all possible directed edges and the distinction between a parent and an ancestor node of the BN. To avoid damaging the equipment only non-invasive faults were examined in the testbed however the same approach can possibly be used for invasive faults. The validation experiments determined the structural hamming distance (SHD) metric, and using the time to failure as its parameter. Reduction of this parameter results into an enhanced BN structure, while increasing it does the opposite. This shows the accuracy from the proposed approach is superior than traditional methods. [20] focused on the improvement of operation efficiency of micro-grids by developing a smart framework based on cloud-edge integration used for the diagnosis of a micro-grid composed of three sub-micro-grids with different photovoltaic arrays under different operating conditions. The developed intelligent framework consists of three stages: Firstly, a micro-grid DT model was created on the CloudPSS platform using a DT approach. Secondly, a neural network-based FD model was developed by training it on the cloud server, using data from DT model. Finally, the trained model is downloaded to the edge device to conduct offline FD of the micro-grid, which reduces the computational load on the cloud server. This is particularly important for maintaining the security and reliability of data storage and transmission. The neural network uses a Rectified Linear Unit (ReLU) activation function, and as the number of iterations increased, the loss value of the model decreased, resulting in a 95% accuracy. [16] discussed a model-based system-level DT FD of thermal-hydraulic high-pressure feedwater systems present in nuclear power plants. The model-based approach makes it possible for virtual sensors to be utilized in the multi-component system, and be placed in areas that would not be otherwise possible due to physical domain sensor restraints which results in improved FD capabilities and automated monitoring of the DT model. The model construction begins with the decomposition of the system into its operational building blocks with functionalities that can be explained by first principles. Measurements taken by the physical sensors are used to create the model, in hand with the virtual sensors that are used to determine the unmeasured process variables, relying on a combination of conservation laws and relations of components present in the system. After the measurements have been identified from both sensors, these will be used for the model calibration. The result of their model validation showed that their approach was able to indicate a recurring abnormality during the startup of the tested feedwater component, as confirmed by the plant operator. The work of [42] provides a simple discussion on the intelligent monitoring and maintenance of power grid substations using DT. The current approach for monitoring of substations often presents complexities due to the independence of equipment and system stages, from their design to operation and maintenance. This results in difficulty with creating a holistic full life cycle of the substation. DT application will provide improved operation monitoring by reconstructing both the substation and its environment, then the reconstructed model is fused with the mapping of the physical substation and thus enable a two-way coordinated interaction, real-time monitoring, FD, and security event warning. A DT estimator is initially used in the DT approach of [65] for the FD of distributed photovoltaic (PV) systems. The DT estimator can be either of the three DT Prediction Methods and analytically measures the real-time characteristics of a system and creates a digital emulation. Unique advantages (high energy yield, scalability, performance reliability) of PV systems when applied in architecture are highly attractive. However, these systems are prone to myriad faults that degrade performance which is attributed to their complex outdoor installations, aging, and equipment weathering. Moreover, the faults occurring at PV energy conversion units (PVECUs) are difficult to discover and repair as the PVECUs are numerous in each system. Hence, a robust DT approach for FD and Fault Identification (FI) that makes use of the measured characteristics of the PVECU and compares with the physical component to generate an error residual vector. The generated vector is analytically evaluated to diagnose the presence of a fault and its PVECU component (PV Panel, Power Converter, Electrical Sensor) origin. Experimental results demonstrate that the approach performs well in realistic outdoor conditions, and is capable of recognizing real-time faults and precisely classifying their origin with relatively higher sensitivity and robustness (yielding a FI window = 2ms) as compared with existing approaches.
Table 3.
System Level DT in FM
| PY | Ref | Industry | Application | Prediction Method |
Proposed Algorithm |
Performance |
|---|---|---|---|---|---|---|
| 2021 | [26] | Manufacturing | Assembly Line Robots |
Data-Driven | Structural Intervention |
SHD Score = 9 |
| 2021 | [20] | Energy | Microgrid | Data-Driven | Connected Neural Networks |
Acc: 95% |
| 2021 | [16] | Nuclear | High-Pressure Feedwater System |
Model-Based | Mass Balanced Virtual Sensors |
N/A |
| 2022 | [42] | Energy | Power-Grid Equipment |
Hybrid | N/A | N/A |
| 2022 | [65] | Energy | Smart Building | Model-Based | Prototype Validation |
Small FI Window = 2ms |
While the implementation of DT in FM presents unique benefits, there are also several challenges that need to be addressed to refine the application of this technology. One main challenge is the lack of standardization and interoperability among different equipment and systems leading to difficulties when integrating existing monitoring systems with proposed DT models [20]. This results in a lack of scalability, limited data sharing, and increased costs due to customized solutions across different systems. As DT technology relies heavily on data used for DT model calibration, the accuracy and reliability of data are vital, which can be affected by factors such as consistency and completeness of the data, and the quality of the sensors. This requires precise selection, calibration, sensor placement, and data pre-processing techniques. An interesting aid to this problem would be the approach presented in [16], using virtual sensors to secure the completeness of data. Tremendous amounts of data are required for the model creation which can result in privacy and security concerns. It is critical to guarantee the confidentiality, integrity, and quality of the data for the successful implementation of DT in FM [31]. Significant computational resources are essential which can be an issue for systems with constrained resources and it is, therefore, necessary to continuously develop efficient and scalable algorithms. The development of accurate and reliable DT models requires a deep understanding of the underlying processes of equipment or a system wherein, the lack of domain knowledge and expertise presents itself as a significant challenge.
There are also several opportunities that can be leveraged by the implementation of DT in FM. One of which is the ability to improve from the current reactive maintenance approach to a more proactive predictive maintenance approach. Through real-time monitoring and prediction of impending failures of the equipment/system, maintenance activities can be performed before failure occurs which can promote increased equipment/system uptime and significant cost savings. In addition, DT in FM allows the development of more precise and reliable prognostic models that would greatly aid equipment design optimization leading to increased efficiency and improved product quality. Furthermore, this can also enable the data integration of different equipment and different systems to obtain a more comprehensive view of the entire system, establishing improved system-level monitoring and optimization. The development of new business models providing real-time information on the equipment/system and conducting predictive maintenance can be explored to increase revenue streams and improve customer satisfaction.
5. Conclusions
This paper presents the overview of DT technology and the factors why this technology has emerged as a promising approach for fault monitoring in various industries, offering the potential for improved predictive maintenance, process optimization, and quality control. Furthermore, when integrated with artificial intelligence, DTs can provide autonomous systems capable of simulating alternative scenarios and enhancing the reliability and performance of physical assets. Case studies from various industries demonstrate the effectiveness of DTs in fault monitoring. At the equipment level, DTs have been applied to monitor rolling bearings, detect crack types and sizes, diagnose faults in aviation turbofan engines, and enable sensor diagnostics in marine engines. System-level applications involve integrating multiple data sources and modeling techniques to accurately diagnose and predict equipment faults in manufacturing environments. Despite the benefits offered by DTs, challenges exist. Data-driven methods rely heavily on sensor data availability and can be limited by the difficulty of installing sensors in specific areas or components. Model-based methods require accurate modeling and calibration, demanding technical expertise and effort. Hybrid methods aim to address these challenges by combining the strengths of data-driven and model-based approaches.
In conclusion, DT technology holds great promise for fault monitoring in various industries. Its integration with artificial intelligence enables the development of autonomous systems that continuously simulate and optimize the performance of physical assets. However, careful consideration of the appropriate prediction method and addressing challenges related to data acquisition and model accuracy are essential for successful implementation. The continued advancement and application of DTs are expected to contribute significantly to improving fault monitoring, predictive maintenance, and overall operational efficiency in the industrial sector.
Conflicts of Interest
The authors declare no conflict of interest.
Abbreviations
| FM | Fault Monitoring |
| AFMS | Advanced Fault Monitoring Systems |
| DT | Digital Twin |
| IoT | Internet of Things |
| ML | Machine Learning |
| RUL | Remaining Useful Life |
| SPHM | Smart Prognostics and Health Management |
| PHM | Prognostics and Health Management |
| FD | Fault Diagnosis |
| PV | Photovoltaic |
| MEMS | Micro-Electro-Mechanical Systems |
| UDS | Unified Digital System |
| SOC | State of Charge |
| SOH | State of Health |
| OBD | On Board Diagnosis |
| DES | Discrete Event Simulation |
| BN | Bayesian Network |
| SIA | Structural Hamming Distance (SHD) metric |
| ReLU | Rectified Linear Unit |
| PVECU | PV Energy Conversion Unit |
| FI | Fault Identification |
References
- Yang, F.; Cui, Y.; Wu, F.; Zhang, R. Fault monitoring of chemical process based on sliding window wavelet DenoisingGLPP. Processes 2021, 9, 86. [Google Scholar] [CrossRef]
- Liu, J.; Wang, J.; Liu, X.; Ma, T.; Tang, Z. MWRSPCA: Online fault monitoring based on moving window recursive sparse principal component analysis. Journal of Intelligent Manufacturing 2022, pp. 1–17.
- Rodríguez Ramos, A.; Bernal de Lázaro, J.M.; Prieto-Moreno, A.; da Silva Neto, A.J.; Llanes-Santiago, O. An approach to robust fault diagnosis in mechanical systems using computational intelligence. J. Intell. Manuf. 2019, 30, 1601–1615. [Google Scholar] [CrossRef]
- Yang, W.; Zimroz, R.; Papaelias, M. Advances in Machine Condition Monitoring and Fault Diagnosis, 2022.
- Xu, L.D.; Xu, E.L.; Li, L. Industry 4.0: State of the art and future trends. Int. J. Prod. Res. 2018, 56, 2941–2962. [Google Scholar] [CrossRef]
- Berghout, T.; Benbouzid, M.; Muyeen, S.; Bentrcia, T.; Mouss, L.H. Auto-NAHL: A neural network approach for condition-based maintenance of complex industrial systems. IEEE Access 2021, 9, 152829–152840. [Google Scholar] [CrossRef]
- Sezer, E.; Romero, D.; Guedea, F.; Macchi, M.; Emmanouilidis, C. An industry 4.0-enabled low cost predictive maintenance approach for smes. 2018 IEEE International Conference on Engineering, Technology and Innovation (ICE/ITMC). IEEE, 2018, pp. 1–8.
- Peng, J.; Xia, G.; Li, Y.; Song, Y.; Hao, M. Knowledge-based prognostics and health management of a pumping system under the linguistic decision-making context. Expert Syst. Appl. 2022, 209, 118379. [Google Scholar] [CrossRef]
- YAMAN, O.; BİÇEN, Y. An Internet of Things (IoT) based monitoring system for oil-immersed transformers. Balk. J. Electr. Comput. Eng. 2019, 7, 226–234. [Google Scholar] [CrossRef]
- Zhou, G.; Zhang, C.; Li, Z.; Ding, K.; Wang, C. Knowledge-driven digital twin manufacturing cell towards intelligent manufacturing. Int. J. Prod. Res. 2020, 58, 1034–1051. [Google Scholar] [CrossRef]
- Grieves, M.; Vickers, J. Digital twin: Mitigating unpredictable, undesirable emergent behavior in complex systems. Transdisciplinary perspectives on complex systems: New findings and approaches 2017, pp. 85–113.
- Tao, F.; Sui, F.; Liu, A.; Qi, Q.; Zhang, M.; Song, B.; Guo, Z.; Lu, S.C.Y.; Nee, A.Y. Digital twin-driven product design framework. Int. J. Prod. Res. 2019, 57, 3935–3953. [Google Scholar] [CrossRef]
- LaGrange, E. Developing a digital twin: The roadmap for oil and gas optimization. SPE Offshore Europe Conference and Exhibition. OnePetro, 2019.
- Sukhorukov, A.; Eroshkin, S.; Vanyurikhin, P.; Karabahciev, S.; Bogdanova, E. Robotization of business processes of enterprises of housing and communal services. E3S Web of Conferences. EDP Sciences, 2019, Vol. 110, p. 02082.
- Jiang, J.; Li, H.; Mao, Z.; Liu, F.; Zhang, J.; Jiang, Z.; Li, H. A digital twin auxiliary approach based on adaptive sparse attention network for diesel engine fault diagnosis. Sci. Rep. 2022, 12. [Google Scholar] [CrossRef] [PubMed]
- Nguyen, T.N.; Ponciroli, R.; Bruck, P.; Esselman, T.C.; Rigatti, J.A.; Vilim, R.B. A digital twin approach to system-level fault detection and diagnosis for improved equipment health monitoring. Ann. Nucl. Energy 2022, 170. [Google Scholar] [CrossRef]
- Stoumpos, S.; Theotokatos, G. A novel methodology for marine dual fuel engines sensors diagnostics and health management. Int. J. Engine Res. 2022, 23. [Google Scholar] [CrossRef]
- Peng, C.C.; Chen, Y.H. Digital Twins-Based Online Monitoring of TFE-731 Turbofan Engine Using Fast Orthogonal Search. IEEE Syst. J. 2022, 16. [Google Scholar] [CrossRef]
- Lin, L.; Athe, P.; Rouxelin, P.; Avramova, M.; Gupta, A.; Youngblood, R.; Lane, J.; Dinh, N. Digital-twin-based improvements to diagnosis, prognosis, strategy assessment, and discrepancy checking in a nearly autonomous management and control system. Ann. Nucl. Energy 2022, 166. [Google Scholar] [CrossRef]
- Chen, W.; Feng, B.; Tan, Z.; Wu, N.; Song, F. Intelligent fault diagnosis framework of microgrid based on cloud–edge integration. Energy Rep. 2022, 8. [Google Scholar] [CrossRef]
- Lv, Z.; Guo, J.; Lv, H. Safety Poka Yoke in Zero-Defect Manufacturing Based on Digital Twins. IEEE Transactions on Industrial Informatics 2022. [Google Scholar] [CrossRef]
- Piltan, F.; Toma, R.N.; Shon, D.; Im, K.; Choi, H.K.; Yoo, D.S.; Kim, J.M. Strict-Feedback Backstepping Digital Twin and Machine Learning Solution in AE Signals for Bearing Crack Identification. Sensors 2022, 22. [Google Scholar] [CrossRef]
- Giannaros, E.; Kotzakolios, A.; Kostopoulos, V.; Sotiriadis, G.; Vignjevic, R.; Djordjevic, N.; Boccaccio, M.; Meo, M. Low- and high-fidelity modeling of sandwich-structured composite response to bird strike, as tools for a digital-twin-assisted damage diagnosis. Int. J. Impact Eng. 2022, 160. [Google Scholar] [CrossRef]
- Garg, H.; Sharma, B.; Shekhar, S.; Agarwal, R. Spoofing detection system for e-health digital twin using EfficientNet Convolution Neural Network. Multimed. Tools Appl. 2022, 81. [Google Scholar] [CrossRef]
- Sisson, W.; Karve, P.; Mahadevan, S. Digital Twin Approach for Component Health-Informed Rotorcraft Flight Parameter Optimization. AIAA J. 2022, 60. [Google Scholar] [CrossRef]
- Ademujimi, T.; Prabhu, V. Digital Twin for Training Bayesian Networks for Fault Diagnostics of Manufacturing Systems. Sensors 2022, 22. [Google Scholar] [CrossRef]
- Hu, W.; Fang, J.; Liu, F.; Chen, W.; Liu, Z.; Liao, J.; Tan, J. Real-time State Mirror-mapping for Driving and Bolting Integration Equipment Based on Digital Twin. Hunan Daxue Xuebao/Journal Hunan Univ. Nat. Sci. 2022, 49. [Google Scholar] [CrossRef]
- Haas, R.; Pichler, K. Fault diagnosis in a hydraulic circuit using a support vector machine trained by a digital twin. Dynamics and Control of Advanced Structures and Machines: Contributions from the 4th International Workshop, Linz, Austria. Springer, 2022, pp. 47–60.
- Piltan, F.; Kim, J.M. An Adaptive-Backstepping Digital Twin-Based Approach for Bearing Crack Size Identification Using Acoustic Emission Signals. 2022, Vol. 418 LNNS. [CrossRef]
- Zhang, X.; Lv, X.; Wang, Y.; Fan, H. Production process management for intelligent coal mining based on digital twin. In Digital Twin Driven Service; Elsevier, 2022; pp. 251–277.
- Suhail, S.; Hussain, R.; Jurdak, R.; Hong, C.S. Trustworthy Digital Twins in the Industrial Internet of Things With Blockchain. IEEE Internet Comput. 2022, 26. [Google Scholar] [CrossRef]
- Hu, S.; Wang, S.; Su, N.; Li, X.; Zhang, Q. Digital twin based reference architecture for petrochemical monitoring and fault diagnosis. Oil Gas Sci. Technol. 2021, 76. [Google Scholar] [CrossRef]
- Moutis, P.; Alizadeh-Mousavi, O. Digital Twin of Distribution Power Transformer for Real-Time Monitoring of Medium Voltage from Low Voltage Measurements. IEEE Trans. Power Deliv. 2021, 36. [Google Scholar] [CrossRef]
- Seghezzi, E.; Locatelli, M.; Pellegrini, L.; Pattini, G.; Giuda, G.M.D.; Tagliabue, L.C.; Boella, G. Towards an occupancy-oriented digital twin for facility management: Test campaign and sensors assessment. Appl. Sci. (Switzerland) 2021, 11. [Google Scholar] [CrossRef]
- Wei, Y.; Guo, L.; Chen, L.; Zhang, H.; Hu, X.; Zhou, H.; Li, G. Research and implementation of digital twin workshop based on real-time data driven. Jisuanji Jicheng Zhizao Xitong/Computer Integr. Manuf. Syst. CIMS 2021, 27. [Google Scholar] [CrossRef]
- Zhou, K.; Yang, S.; Guo, Z.; Long, X.; Hou, J.; Jin, T. Design of automatic spray monitoring and tele-operation system based on digital twin technology. Proc. Inst. Mech. Eng. Part C: J. Mech. Eng. Sci. 2021, 235. [Google Scholar] [CrossRef]
- Sundaram, S.; Zeid, A. Smart prognostics and health management (SPHM) in smart manufacturing: An interoperable framework. Sensors 2021, 21. [Google Scholar] [CrossRef] [PubMed]
- Zhang, S.; Dong, H.; Maschek, U.; Song, H. A digital-twin-assisted fault diagnosis of railway point machine. 2021. [CrossRef]
- Tang, L.; Huang, X.; Zhang, C.; He, X.; Zhu, T.; Gu, L.; Wan, Y. Health assessment and fault diagnosis of substation equipment based on digital twin. 2021, Vol. 2030. [CrossRef]
- Zhao, H.; Hu, W.; Liu, Z.; Tan, J. A capsnet-based fault diagnosis method for a digital twin of a wind turbine gearbox. 2021, Vol. 2021-July. [CrossRef]
- Hu, J.; Hu, N.; Luo, P.; Yang, Y. Fault Diagnosis of Gearbox Based on Digital Twin Concept Model. 2021. [CrossRef]
- Wang, H.; Lin, P.; Hou, Z.; Sun, S. Research on Intelligent Monitoring and Maintenance Technology of Substation Based on Digital Twin. 2021, Vol. 2136. [CrossRef]
- Tan, Y.; Niu, C.; Tian, H.; Zhang, J. A Digital Twin Based Design of the Semi-physical Marine Engine Room Simulator for Remote Maintenance Assistance. 2021. [CrossRef]
- Xing, Y.; Song, X.; Zhang, Z.; Zhang, J.; Song, W.; Liu, B. Intelligent Diagnosis Method of Distribution Network Fault for Construction of Digital Twin Coordination System. 2021. [CrossRef]
- Deebak, B.D.; Al-Turjman, F. Digital-twin assisted: Fault diagnosis using deep transfer learning for machining tool condition. International Journal of Intelligent Systems 2021. [Google Scholar] [CrossRef]
- Xia, M.; Shao, H.; Williams, D.; Lu, S.; Shu, L.; de Silva, C.W. Intelligent fault diagnosis of machinery using digital twin-assisted deep transfer learning. Reliab. Eng. Syst. Saf. 2021, 215. [Google Scholar] [CrossRef]
- Liu, J.; Yu, D.; Hu, Y.; Yu, H.; He, W.; Zhang, L. CNC Machine Tool Fault Diagnosis Integrated Rescheduling Approach Supported by Digital Twin-Driven Interaction and Cooperation Framework. IEEE Access 2021, 9. [Google Scholar] [CrossRef]
- Olatunji, O.O.; Adedeji, P.A.; Madushele, N.; Jen, T.C. Overview of Digital Twin Technology in Wind Turbine Fault Diagnosis and Condition Monitoring. 2021. [CrossRef]
- Zhang, M.; Amaitik, N.; Xu, Y.; Rossini, R.; Bosi, I.; Cedola, A.P. A New Implementation of Digital Twins for Fault Diagnosis of Large Industrial Equipment. J. Robot. Mech. Eng. 2021, 1. [Google Scholar] [CrossRef]
- Lee, J.; Lin, L.; Athe, P.; Dinh, N. Development of the Machine Learning-based Safety Significant Factor Inference Model for Diagnosis in Autonomous Control System. Ann. Nucl. Energy 2021, 162. [Google Scholar] [CrossRef]
- Lopes, T.D.; Raizer, A.; Júnior, W.V. The use of digital twins in finite element for the study of induction motors faults. Sensors 2021, 21. [Google Scholar] [CrossRef]
- Gao, D.; Liu, P.; Jiang, S.; Gao, X.; Wang, K.; Zhao, A.; Xue, Y. Intelligent instrument fault diagnosis and prediction system based on digital twin technology. 2021, Vol. 1983. [CrossRef]
- Classens, K.; Heemels, W.P.; Oomen, T. Digital twins in mechatronics: From model-based control to predictive maintenance. 2021. [CrossRef]
- Zhu, Y.; Qian, Z.; Yuan, S.; Yu, H. Fault Diagnosis of High-Voltage Circuit Breaker Based on Digital Twin. 2021. [CrossRef]
- Zhen, W.; Dunbing, T.; Changchun, L.; Xin, X.; Linqi, Z.; Zhuocheng, Z.; Xuan, L. Augmented-Reality-Assisted Bearing Fault Diagnosis in Intelligent Manufacturing Workshop Using Deep Transfer Learning. 2021. [CrossRef]
- Bhatti, G.; Singh, R.R. Intelligent Fault Diagnosis Mechanism for Industrial Robot Actuators using Digital Twin Technology. 2021. [CrossRef]
- Merkle, L.; Pöthig, M.; Schmid, F. Estimate e-golf battery state using diagnostic data and a digital twin. Batteries 2021, 7. [Google Scholar] [CrossRef]
- Liu, J.; Lu, X.; Zhou, Y.; Cui, J.; Wang, S.; Zhao, Z. Design of Photovoltaic Power Station Intelligent Operation and Maintenance System Based on Digital Twin. 2021. [CrossRef]
- Ren, S.S.; Shen, F.; Zhang, X.Y.; Feng, C.M.; Luo, H.W. Digital Twin of Beam Pumping Unit Control and Analysis. 2021, Vol. 1894. [CrossRef]
- Yu, Q.; Huang, Y.; Liu, Y.; Yu, S.; Wang, S. Research on Application of Information Model in Wind Turbine Fault Diagnosis. 2021. [CrossRef]
- Delong, Z.; Zhijun, Y.; Huipeng, C.; Peng, Z.; Jiliang, L. Research on Digital Twin Model and Visualization of Power Transformer. 2021. [CrossRef]
- Shangguan, D.; Chen, L.; Ding, J. A digital twin-based approach for the fault diagnosis and health monitoring of a complex satellite system. Symmetry 2020, 12. [Google Scholar] [CrossRef]
- Bouzid, S.; Viarouge, P.; Cros, J. Real-time digital twin of a wound rotor induction machine based on finite element method. Energies 2020, 13. [Google Scholar] [CrossRef]
- Panov, V.; Cruz-Manzo, S. Gas turbine performance digital twin for real-time embedded systems. 2020, Vol. 5. 5. [CrossRef]
- Jain, P.; Poon, J.; Singh, J.P.; Spanos, C.; Sanders, S.R.; Panda, S.K. A digital twin approach for fault diagnosis in distributed photovoltaic systems. IEEE Trans. Power Electron. 2020, 35. [Google Scholar] [CrossRef]
- Rossini, R.; Conzon, D.; Prato, G.; Pastrone, C.; Reis, J.; Gonçalves, G. REPLICA: A solution for next generation iot and digital twin based fault diagnosis and predictive maintenance. 2020, Vol. 2739.
- Palchevskyi, B.; Krestyanpol, L. The use of the “digital twin” concept for proactive diagnosis of technological packaging systems. 2020, Vol. 1158. [CrossRef]
- Wang, J.; Ye, L.; Gao, R.X.; Li, C.; Zhang, L. Digital Twin for rotating machinery fault diagnosis in smart manufacturing. Int. J. Prod. Res. 2019, 57. [Google Scholar] [CrossRef]
- Xu, Y.; Sun, Y.; Liu, X.; Zheng, Y. A Digital-Twin-Assisted Fault Diagnosis Using Deep Transfer Learning. IEEE Access 2019, 7. [Google Scholar] [CrossRef]
- Luo, W.; Hu, T.; Zhang, C.; Wei, Y. Digital twin for CNC machine tool: Modeling and using strategy. J. Ambient Intell. Humaniz. Comput. 2019, 10. [Google Scholar] [CrossRef]
- Venkatesan, S.; Manickavasagam, K.; Tengenkai, N.; Vijayalakshmi, N. Health monitoring and prognosis of electric vehicle motor using intelligent-digital twin. IET Electr. Power Appl. 2019, 13. [Google Scholar] [CrossRef]
- Brandtstaedter, H.; Ludwig, C.; Hubner, L.; Tsouchnika, E.; Jungiewicz, A.; Wever, U. Digital Twins for Large Electric Drive Trains. 2018, Vol. 2018-June. [CrossRef]
- Zaccaria, V.; Stenfelt, M.; Aslanidou, I.; Kyprianidis, K.G. Fleet monitoring and diagnostics framework based on digital twin of aero-engines. 2018, Vol. 6. 6. [CrossRef]
- Talkhestani, B.A.; Jung, T.; Lindemann, B.; Sahlab, N.; Jazdi, N.; Schloegl, W.; Weyrich, M. An architecture of an intelligent digital twin in a cyber-physical production system. at-Automatisierungstechnik 2019, 67, 762–782. [Google Scholar] [CrossRef]
- Guan, P.; Huang, J.; Anvar, A.; Casey, M.B.; Fisher, C.L.; You, S.; Neumann, U. Multi-view 3D object recognition from a point cloud and change detection, 2017. US Patent 9,619,691. 9,619.
- Răileanu, S.; Borangiu, T.; Ivănescu, N.; Morariu, O.; Anton, F. Integrating the digital twin of a shop floor conveyor in the manufacturing control system. Service Oriented, Holonic and Multi-agent Manufacturing Systems for Industry of the Future: Proceedings of SOHOMA 2019 9. Springer, 2020, pp. 134–145.
- Dong, M.; Peng, Y. Equipment PHM using non-stationary segmental hidden semi-Markov model. Robot. Comput.-Integr. Manuf. 2011, 27, 581–590. [Google Scholar] [CrossRef]
- Zhang, H.; Kang, R.; Pecht, M. A hybrid prognostics and health management approach for condition-based maintenance. 2009 IEEE international conference on industrial engineering and engineering management. IEEE, 2009, pp. 1165–1169.
- Tao, F.; Cheng, J.; Qi, Q.; Zhang, M.; Zhang, H.; Sui, F. Digital twin-driven product design, manufacturing and service with big data. Int. J. Adv. Manuf. Technol. 2018, 94, 3563–3576. [Google Scholar] [CrossRef]
- Adamenko, D.; Kunnen, S.; Pluhnau, R.; Loibl, A.; Nagarajah, A. Review and comparison of the methods of designing the Digital Twin. Procedia CIRP 2020, 91, 27–32. [Google Scholar] [CrossRef]
- Lei, Y.; Jia, F.; Lin, J.; Xing, S.; Ding, S.X. An intelligent fault diagnosis method using unsupervised feature learning towards mechanical big data. IEEE Trans. Ind. Electron. 2016, 63, 3137–3147. [Google Scholar] [CrossRef]
- Zhang, C.; He, Y.; Yuan, L.; Xiang, S. Analog circuit incipient fault diagnosis method using DBN based features extraction. Ieee Access 2018, 6, 23053–23064. [Google Scholar] [CrossRef]
- Wang, J.; Xie, J.; Zhao, R.; Zhang, L.; Duan, L. Multisensory fusion based virtual tool wear sensing for ubiquitous manufacturing. Robot. Comput.-Integr. Manuf. 2017, 45, 47–58. [Google Scholar] [CrossRef]
- Li, C.; Zhang, Y.; Xu, M. Reliability-based maintenance optimization under imperfect predictive maintenance. Chin. J. Mech. Eng. 2012, 25, 160–165. [Google Scholar] [CrossRef]
- Lei, Y.; Li, N.; Gontarz, S.; Lin, J.; Radkowski, S.; Dybala, J. A Model-Based Method for Remaining Useful Life Prediction of Machinery. IEEE Trans. Reliab. 2016, 65, 1314–1326. [Google Scholar] [CrossRef]
- Yu, J.; Liu, P.; Li, Z. Hybrid modelling and digital twin development of a steam turbine control stage for online performance monitoring. Renew. Sustain. Energy Rev. 2020, 133, 110077. [Google Scholar] [CrossRef]
- Biggio, L.; Kastanis, I. Prognostics and health management of industrial assets: Current progress and road ahead. Front. Artif. Intell. 2020, 3, 578613. [Google Scholar] [CrossRef] [PubMed]
Figure 1.
Four Layers of DT
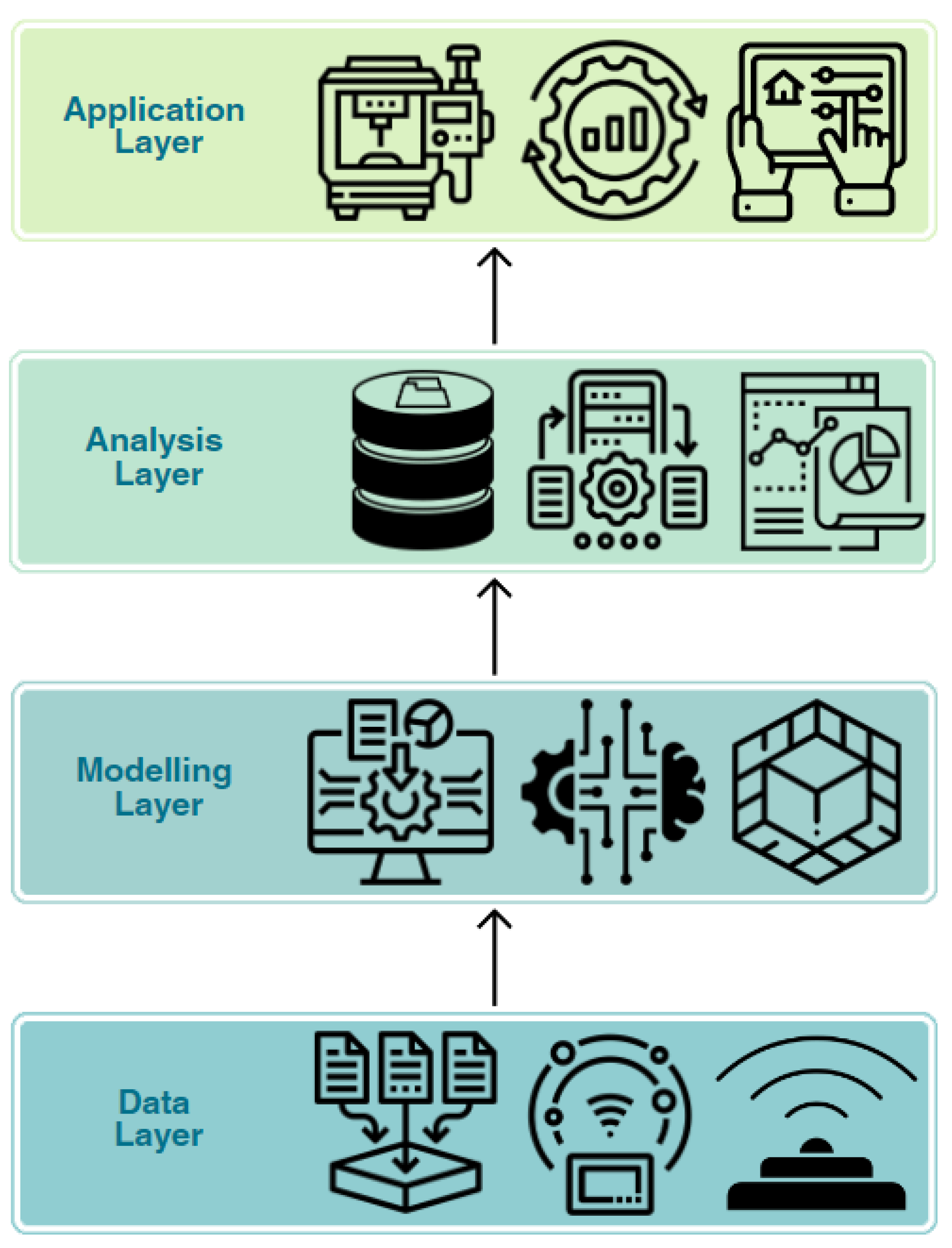
Figure 2.
DT Prediction Mehods.
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



