Submitted:
15 June 2023
Posted:
19 June 2023
You are already at the latest version
Abstract
Multi-level direct networks fueled by the evolving technology of active optical cables and increasing pin-bandwidth achieve reduced diameters and cost, with high-radix switches. These networks, like Dragonfly, are becoming the preferred aspirants for extreme high-performance parallel machines such as exa-scale computing. In this paper, we introduce a Hyper Z-Tree topology, which deploys the Z-Tree, a variant of fat-tree, as a computing node of a Generalized Hypercube (GHC) configuration. The resulting configuration provides higher bisection bandwidth, lower latency for some applications and higher throughput. Furthermore, the levels of the fat tree offer several path diversities across the GHC dimensions, hence conceding a more fault tolerant architecture. To profit from these path diversities, we propose two adaptive routing algorithms, which are extensions to the routing algorithm suggested in HyperX topology. These two algorithms exhibit better latencies and throughput than the HyperX.
Keywords:
Adaptive routing
; deterministic routing
; connectivity
; Hypercube
; at-tree
; deadlock
; high switch-radix
1. Introduction
The next generation of supercomputers will face more challenges to tackle far more complex
and larger programming problems and open new horizons in the scientific,
engineering and business disciplines [1–3].
However, an increase in the computational speed of processors can lead to
extreme power constrains [4]. Interconnecting
a larger number of chips, while keeping the overall cost under budget and
delivering the required performance, is a trade-off. A need to interconnect
those high-speed processing elements in the best manner possible is a
challenging task [5]. While the technology
for higher speed processors keeps advancing, the search for resilient
interconnection networks of high performance computing lags behind and shows
trifling contributions [6].
Fat tree topologies [7],
with their simplistic properties and ability
to scale, are deemed to be the most popular
solution for computing clusters, data centers and HPC [8–10]. They can be seen as universal networks
that emulate any other topology deploying the same amount of resources with
slight reduction in the power consumption. The high path diversity in fat
trees, with its fault tolerant property, plays a critical role in the overall
performance of the communication networks. One interesting approach is hybrid
networks which involve the incorporation of fat tree design as building blocks
within large scale parallel systems. This is the inspiration of the research
presented in this paper. There are several hybrid interconnections that use
different topologies at each level as in BlueGene IBM [11–13], Dragonfly [14,15], X-Mesh [16] and Torus [17].
Furthermore, newer technologies on optical networks and photonic switches are
emerging. These technologies have shown potential to attain higher bandwidth
and effective power consumption. The papers [18,19]
show the possibility to interconnect fat tree topologies by photonic routers.
Although issues such as crosstalk that limit the scalability of these systems
can be an obstacle. Current research is advancing in this direction to provide
effective solutions. Our proposed architecture takes advantage of photonic
switches of any radix. Fat trees can also be considered a candidate for
wireless networks in HPC environments. Initial work has been done in this
direction [20] to execute parallel tasks on
wireless nodes with up to 8 transceivers acting as nodes’ degree. The major
constraints of on-chip radio devices are the limitation of the transmission
rate and high-power consumption which make them less favorable for modern
parallel platforms. However, with the new 802.11ac and beyond, the speed of the
WiFi is reaching the 7Gbps and over.
This paper considers hosting the Z-tree [21] as nodes for a generalized hypercube network
(GHC) [22]. The choice of a GHC is procured
based on the scalability of the architecture and its small radius. Its high
degree per node is compensated for by the provision of the side links (global
links) offered by the switch of the Z-Tree. This approach has already been
adopted by HyperX topology [23,24]. However,
HyperX offers a single switch of high radix per node. This makes, as this
paper proves later on, HyperZ a generalized version of HyperX. The proposed
approach outperforms the HyperX and allows a larger design space to select
optimal topologies that answer the demands of parallel applications.
This paper contributes by developing a new
multi-level direct network based on a Z-tree as a computational node for a GHC
interconnect. The topology is viewed as an extension to HyperX. It
accommodates far more processors with smaller switch
radix compared to the HyperX of the same size. This design relying on
the number of levels of the Z-Tree offers high bisection bandwidth, lower
latency, and multiple concurrent communications between nodes of the GHC. To
take advantage of this structure, two adaptive routing algorithms which are
more efficient and fault tolerant than HyperX are suggested. The algorithm
exploits the path diversities constructed from the Hyper Z-Tree.
2. Related Work
Symmetric Tori connected Torus Network (STTN) [26] is a hierarchical
interconnection network of 2D Torus hosting iterative nodes formed from other
tori. STTN architecture is a good solution for moderate and small high
performance systems due to its scalable nature as the node degree is always
fixed. However, for large scale networks, the diameter is inevitably large
which leads to higher latencies, with large bisection bandwidth. Torus embedded
hypercube interconnect proposed by Kini [27] is a network
architecture that can offer scalability in parallel computation. However, for
this solution to work, the size of hypercube is required to stay constant at
all times to avoid node degree changes. But for large scale systems this will
not be the case, and the diameter has to increase to fit the size of the
network. The hierarchical network (HTN) consists
of 3D-tori modules connected together by a 2D torus network. The Pruned HTN
version [28] removes links along the
dimensions to reduce complexity, and it achieves better results than the
original HTN in terms of power consumption, latency and bandwidth. The
dimension order routing is adopted to route messages. However, the dimension
routing algorithm is not adaptive and it does not exploit all the paths within
the network, hence putting a limit on the performance for large-scale parallel
systems. Hyper nodes torus is an architecture that extends torus
interconnection by replacing each node in the torus with a ring [29]. A
distributed environment is laid down as each node can be either a memory or a
processor. An optimal version of the XY-routing was proposed to take into
consideration the routing within the ring. The results presented show the hyper
node torus achieves lower latency than the hypercube and torus for 16, and 64
nodes. There is no evidence that the proposed system will work for large-scale
networks, as the size of the ring has to be kept to a minimum, which is not
always the case with higher number of processors.
Recently, a lot of interest has been devoted to
multi-level direct networks as promising scalable topology for high performance
computing such as PETCS [30], Dragonfly [14,15] and Cray [30]. These networks built from high-radix switches give
the impression of an all-to-all interconnection. PERCS high performance
interconnect aims to improve the bisection bandwidth for high performance
supercomputers challenge. The hub chip comes with a large number of local and
remote links fully equipped with routing components, so it requires no external
switches or routers. Similarly, to Dragonfly and Cray, PERCS implements
2-level direct-connect. Unlike PERCS, Cray and the Dragonfly networks offers
the possibility to emulate any topologies within the groups. The full
connectivity at level 1 and 2 of the supernodes in PERCS brands it as
non-scalable for large size networks. PERCS also uses 3 hopes routing for inter
and intra supernodes communications for normal traffic conditions. For
hot-spot traffic, the routing algorithm deviates the path to a random supernode
and then routes to the destination making a path of 5 hopes. The dragonfly is
a hierarchical topology that reduces the network diameter and the number of
long cables. It includes multiple groups that are connected by all-to-all
links. Each groups can have different internal topology, and connects fully to
other groups via global long optical channels, when it is possible.
HyperZ, presented in this paper, and HyperX belong
to these classes of networks but using hypercube (GHC) rather than all-to-all
interconnections to maximise the bisection bandwidth, and minimise the diameter
and the latency, at the expense of more cables. The cost of the external
cabling can be justified by the usage of optical connections. HyperZ, like
others, is driven by the technology evolution in active optical cables and the
increase in pin-bandwidth that is high radix switches with large number of
narrow ports. HyperZ uses Z-tree as a computing node. The levels or height of
the Z-tree add extra global cables but create parallel layers that segregate
traffic and achieve higher bandwidth and lower latencies. The HyperX has only
1 level, and therefore a single layer.
3. Hyper Z Construction
The HyperZ is a generalized hypercube
interconnection whose processing nodes are fat trees. The fat trees have the
specifications of the Z-tree [21]. A regular
Z-node has equal number of routing nodes (switches) of equal radix at all
levels of the tree. Unlike HyperX which can be viewed as flattened
butterfly or hypercube with nodes containing single switches with several
processing elements, our proposed architecture is more general and includes
also HyperX configuration in its space when the height of the Z-node is 1. A
group of Z-nodes in the kth-dimension is refere to as a super
node, S-node, where k is 1≤k≤d with d representing
the number of dimensions in the GHC topology.
The definition of the HyperZ of dimension d
and height h can be written as
Hd,h (s1, …,sd ; Q1, …,Qd) (Zh)
The specification of (Zh) is
defined in [21], as Zh (z1,
…,zh ; r1, …,rh; g1, …gh),
where h is the number of levels (height), zi of zones, ri switches, and gi of
internal links in the Z-tree at level i. The vector Qk = (q1k, … qik, …, qhk) is
the set of external or side connections in the kth-dimension
of GHC, 1≤k≤d, where qikis the number of links between two z-nodes along the dimension k,
at level i of the Z-Tree, 1≤i≤h. The vector (s1,
…, sd) symbolizes the number of S-Nodes in each dimension, 1
to d. For convenience, when all the links at each level of the Z-nodes
are equal, the parameter, Qk, isreplaced byqk. The HyperX topology has only one level,
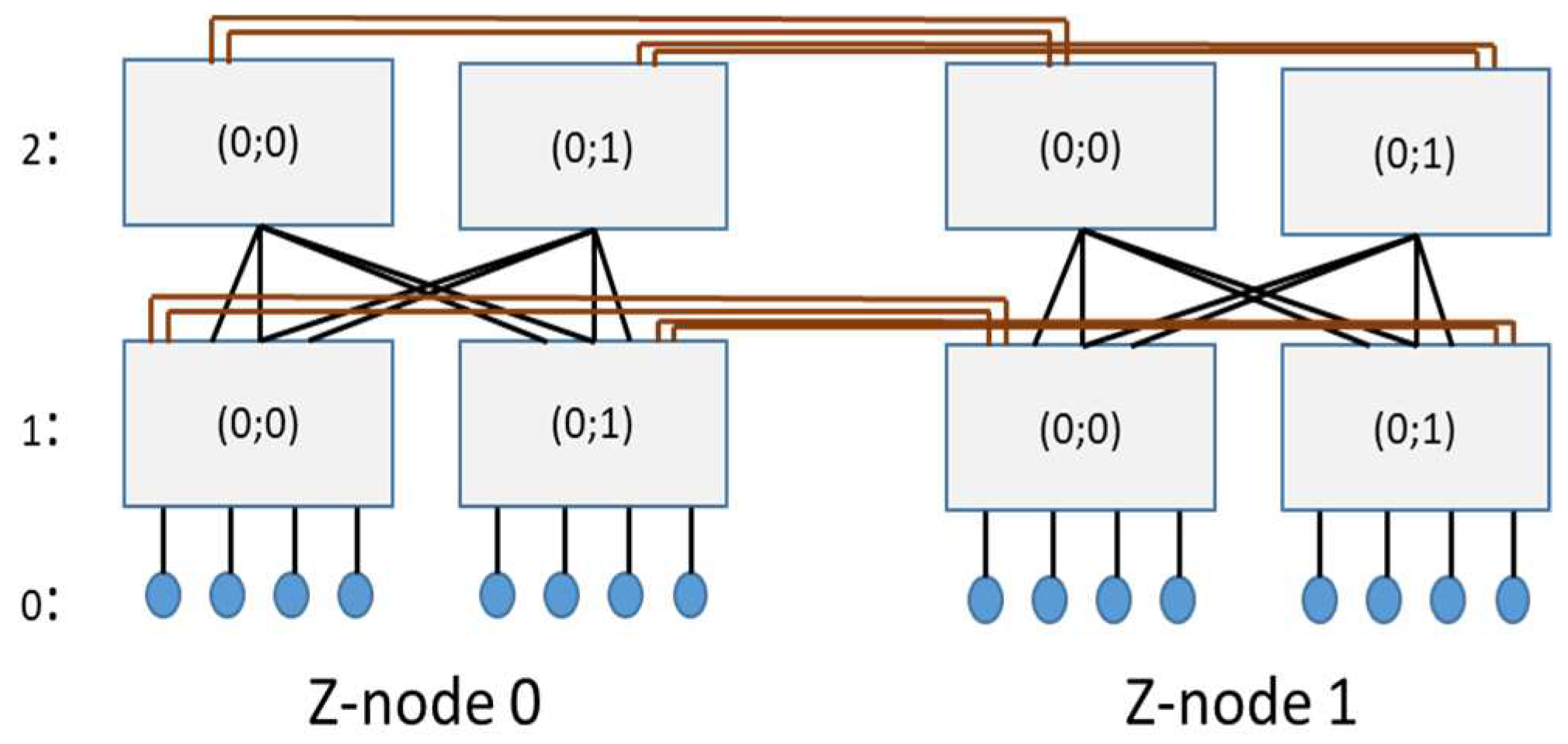
a height of h=1, and a single switch per Z-node. As shown in Figure 1, at level 2, the HyperZ
can be seen as 2-parallel layers of HyperX. This configuration will increase
the bandwidth and accommodate far more processing nodes while reducing the
connectivity – ports numbers - per routing nodes.
In general, the total number of nodes (processing, i=0
or routing, i≥1, nodes) in the Z-node, Ri, and HyperZ,
Ni, can be expressed as
Figure 1.
HyperZ of dimension, d=1, and height, h=3, H1,3(2;2)(Z2) with Z2 (4,2;1,2;1,2). There are (q1=2) external links per level per switch.
Figure 1.
HyperZ of dimension, d=1, and height, h=3, H1,3(2;2)(Z2) with Z2 (4,2;1,2;1,2). There are (q1=2) external links per level per switch.
3.1.Hyper Z-Fat Tree Connectivity Rules
Each node at level i, 0 ≤i ≤ h, within the
Z-node, can be represented by a flat address, Xi, where Xi ϵ {0, 1, …, -1}. On the other hand, each node in the
HyperZ can be extended by the tuple (ad, ad-1, …, a1;
Xi) where ak ϵ
{0, 1, …, sk -1} for 1≤k≤d. The hierarchical address (ad,
ad-1, …, a1) is also an abstract address of a Z-node
in the HyperZ. For instance, in Figure 1,
at level 2 there are 2 routing nodes, R2=2, in the
Z-node 0 and Z-node 1. Thus, the tuple (a1, X2) has
the flat address X2 ϵ
{0, 1}, and the hierarchical address a1 ϵ {0, 1} since s1
= 2, giving the tuples (0; 0), (0; 1) for the Z-node 0 and the tuples (1;
0), (0; 1) for the Z-node 1 at level 2.
The levels offer the traffic several paths from
each Z-node to the others across the network. Thus, the communications take
place concurrently though the layers. In Figure
2, there are 2 layers corresponding to 2 levels of the Z-node. Each
layer has several paths emerging from the links of each routing node, switch.
The Z-tree bidirectional connectivity can be
established by first instantiating all the nodes (processing node i=0 and
routing nodes i>0), assigning them unique flat address Xi
and then linking them internally according to the rule of the Z-tree
connections [21]. The inter-connections of
the Z-nodes in the GHC network along each dimension can be established as
stated below.
A node A of tuple (ad, ad-1,
…, a1; Xi) connects by bidirectional links to
a node B of tuple (bd, bd-1, …, b1;
Yi), if and only if:
- They have the same flat address within their Z-nodes Xi =Yi ,
- The vector connectivity degree Qk = (q1k, q2k,…, qik …,qhk) in the kth-dimension has at least one element qik≠0,
- They differ in exactly one value in the kth dimension, ak ≠ bkfor all 1≤k≤d.
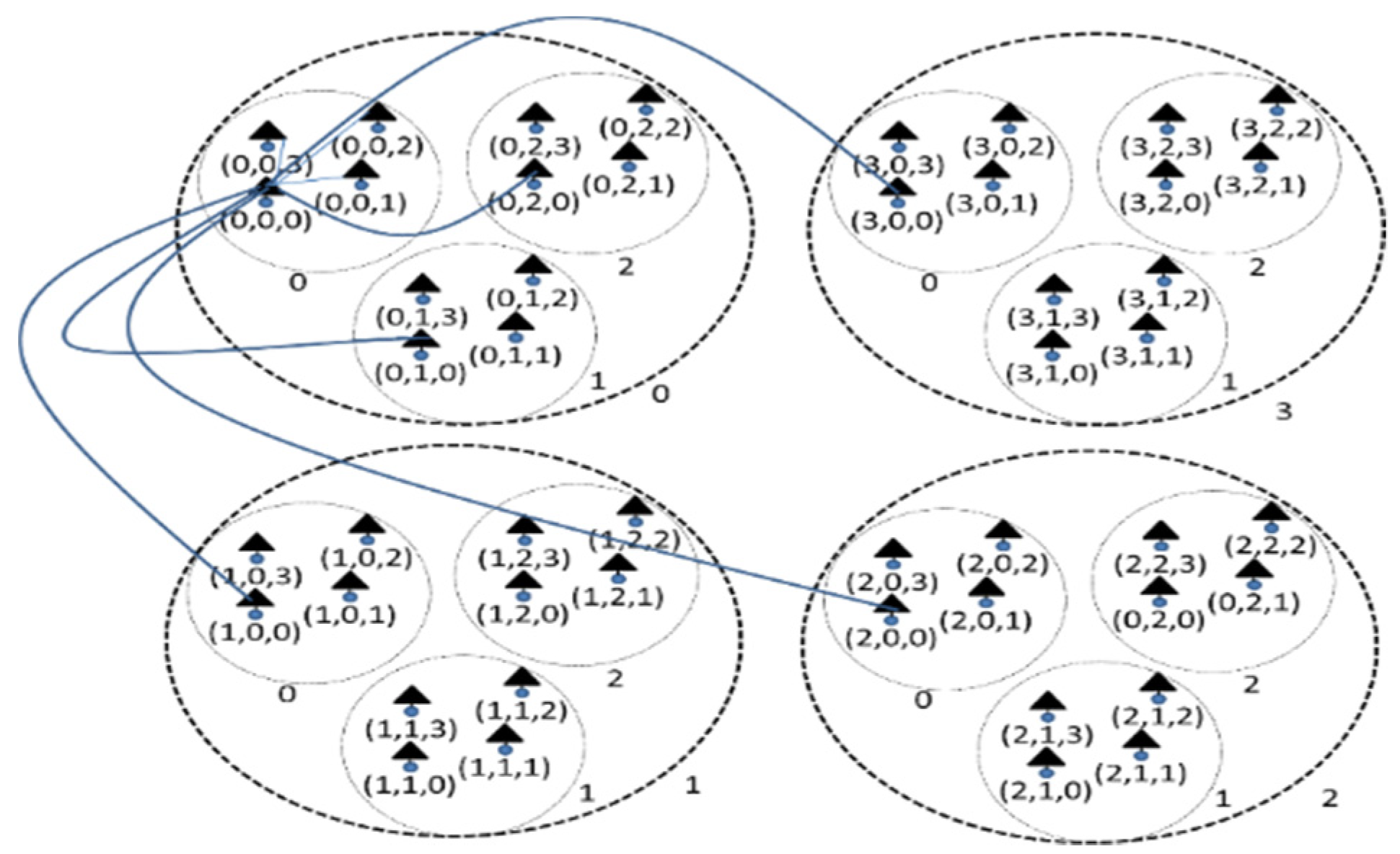
In Figure 2
illustrates an example on how Z-nodes are connected in a HyperZ topology define
as H3,h(4,3,4;1,1,1)(Zh). In this example,
a Z-node is an abstract computational node, (Zh), of
any height and internal structure. In the dimension 1, 2 and 3,
there are 4, 3 and 4 S-nodes, s1 =4, s2=3
and s3=4, respectively. All the connections between the
Z-nodes in all the dimensions at all levels are equal to 1, qk=
1. Dimension 0 is the Z-node itself, shown as a filled triangle. In
dimension 1, there are four S-nodes, labeled 0, 1, 2,
and 3, each containing 1 single Z-node. In dimension 2, there
are three S-nodes, labelled 0, 1, and 2, each containing
four Z-nodes making a total of twelve Z-nodes. Finally, in dimension 3,
there are four S-nodes, labelled 0, 1, 2, and 3, each accommodating twelve
Z-nodes. The Z-node (0, 0, 0) connects to Z-nodes (0, 0, 1), (0, 0, 2) and (0,
0, 3) for all levels i as they differ in dimension 1. It
also connects to Z-nodes (0, 1, 0) and (0, 2, 0), which differs
in dimension 2, and finally connects to Z-nodes (1, 0, 0), (2, 0, 0) and
(3, 0, 0) by differing in dimension 3.
Figure 2.
Hyper Z-Tree, H3,h (3, 4;1, 1, 1) (Zh) , the degree of connectivity vector is 1 in all levels of Z-tree. Only the connections from Znode (0, 0, 0) to all others are shown.
Figure 2.
Hyper Z-Tree, H3,h (3, 4;1, 1, 1) (Zh) , the degree of connectivity vector is 1 in all levels of Z-tree. Only the connections from Znode (0, 0, 0) to all others are shown.
3.2. Topology Features
This section describes the extent of the topology
and its design space to accommodate large number of processors.
Definition 3.1
A regular HyperZ is a topology with zi
= z for all 1 ≤ i
≤ h and sk
= s and qk=q for all 1 ≤ k ≤
d.
This means that the regular HyperZ is constituted
from Regular Z-nodes. Furthermore, if the number of zones in the Z-nodes is
equal to the number of S-nodes at any levels and dimensions, a fully regular
HyperZ is constructed.
Definition 3.2
A fully regular HyperZ is a topology with zi
= sk = s and qk=q for all 1 ≤ i ≤ h and 1 ≤ k ≤ d.
For a fully regular HyperZ to accommodate processors, there should be at least R0
processors per regular Z-node, with each switch radix limited to, , where Lmax is a given technology
dependent switch radix, q the number of side links between Z-nodes and z
is the number of zones within the Z-node, yielding 2z ports per switch.
Thus, the number of S-nodes (s=z) required in all dimensions is bounded
by the radix available
A lower bound to the minimum number of processors
accommodated by the HyperZ can therefore be expressed as , refer to Eq. 2, since z=s for a fully regular
hyperZ, one can write
The equations (3) and (4) establish both an upper
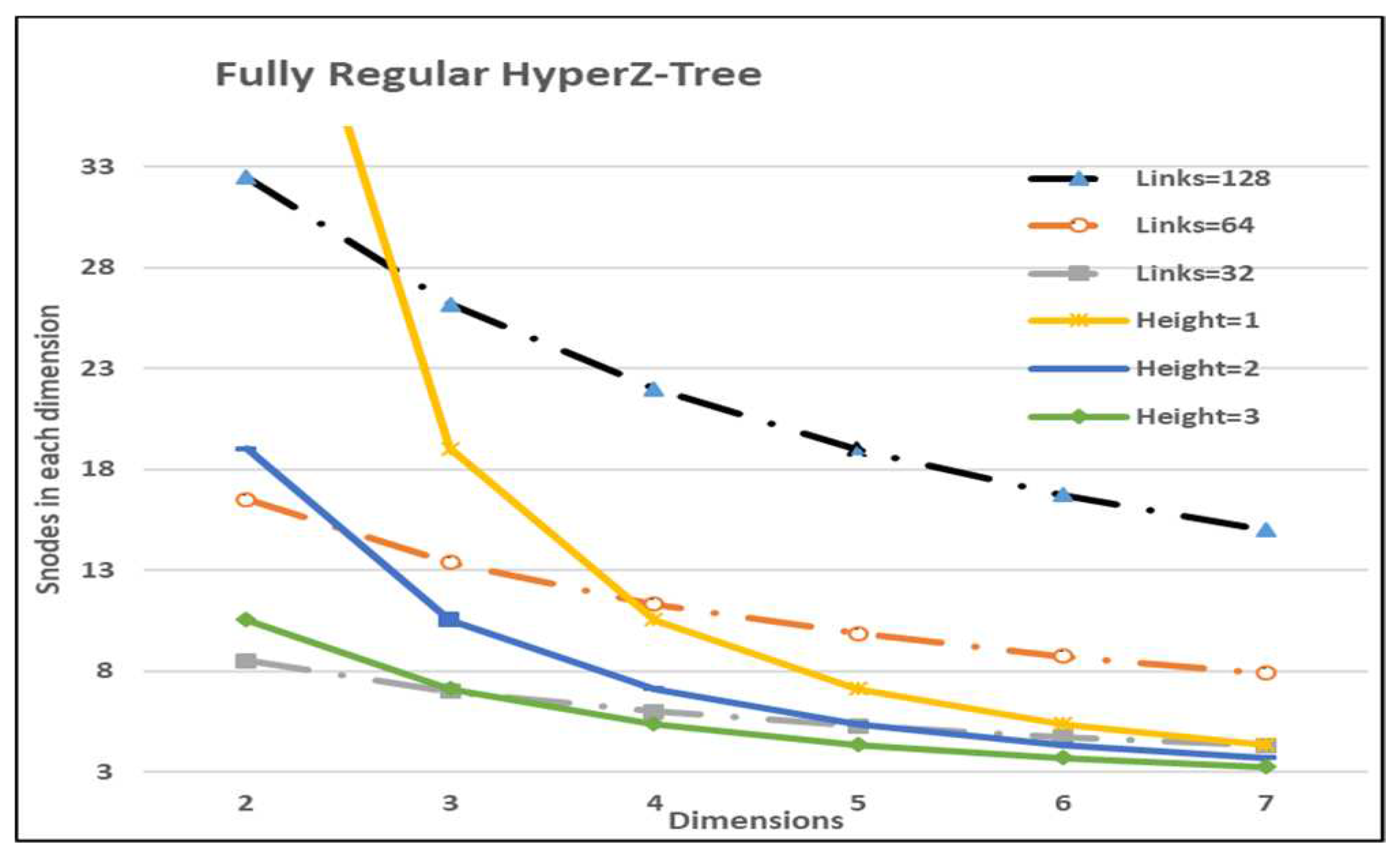
and lower bound for each possible network configuration. It is apparent from Figure 3 that topologies with lower height such
as HyperX, to maintain fixed number of ports per routing node, they required
higher dimensions, and therefore higher diameter leading to higher latencies.
HyperZ with higher height comparable to h=3 and 8 S-nodes would
interconnect a minimum number of processors ranging from 131072, with yet
smaller number of ports per routing node in the order of 32, with GHC of 3
dimensions, see Figure 3. This is an
important result to minimise complexities of switches and thus reduce power
consumption.
Figure 3.
HyperZ design space for 131072 processors.
4. Adaptive Routing in HyperZ
The routing in the HyperZ is considered within the
Z-node travelling through the levels and outside the Z-node travelling through
the dimensions. In the up direction, the messages travel to one of the common
levels before making their way down to the destination processor if it
destination is within the same Z-node. If the destination of the message is
another Z-node, the message crosses the dimensions of the GHC connections, by
following the offset dimensions though the aligned routing nodes belonging to
the shortest path, until the destination, Z-node, is reached. Finally, the
message will make it way down the tree to the destination processor.
Definition 4.1
Given two Z-nodes (ad, …, a2,
a1; q)(Zh)and (bd, …, b2,; q)(Zh)where ak, bk ϵ {0, 1, …, sk-1} for all 1≤k≤d, the
ordered set of shortest paths for a dimension d between the two nodes
can be writte as  (d)=
{xk | xk = 1 if ak=bk ∨ xk
= 0 if ak≠bk,
∀ 1≤k≤d}.
(d)=
{xk | xk = 1 if ak=bk ∨ xk
= 0 if ak≠bk,
∀ 1≤k≤d}.
(d)=
{xk | xk = 1 if ak=bk ∨ xk
= 0 if ak≠bk,
∀ 1≤k≤d}.
For instance, refer to Figure 2, the set of short paths between the
Z-nodes (0, 0, 0) and (3, 0, 1) is (3) = {1, 0, 1} meaning the
routes have to go through dimension 3 and then dimension 1, or dimension 1
followed by dimension 3. There is no route through dimension 2. This is a well-known
concept of GHC topology.
(3) = {1, 0, 1} meaning the
routes have to go through dimension 3 and then dimension 1, or dimension 1
followed by dimension 3. There is no route through dimension 2. This is a well-known
concept of GHC topology.
Definition 4.2
A set of offset dimensions is a subset of (d) where all the
elements are equal to 1 referring to routable or offset dimensions,  ⊆ (d)= {xk≠0, ∀ 1≤k≤d}.
⊆ (d)= {xk≠0, ∀ 1≤k≤d}.
(d) where all the
elements are equal to 1 referring to routable or offset dimensions, ⊆ (d)= {xk≠0, ∀ 1≤k≤d}.
The cardinality, ||, of the set, , determines the number of hops to reach the destination and the
factorial of the cardinality, ||!
defines the number of possible shortest paths between two Z-nodes. Again in Figure 3, the ordered set of short paths
between the Z-nodes (0, 0, 0) and (3, 0, 1) is (3)= {1, 0, 1},
and the set,  {1, 1}, ||! = 2! = 2, indicates that
there are 2 shortest paths of 2 hops each.
{1, 1}, ||! = 2! = 2, indicates that
there are 2 shortest paths of 2 hops each.
|, of the set, , determines the number of hops to reach the destination and the
factorial of the cardinality, ||!
defines the number of possible shortest paths between two Z-nodes. Again in Figure 3, the ordered set of short paths
between the Z-nodes (0, 0, 0) and (3, 0, 1) is (3)= {1, 0, 1},
and the set, {1, 1}, ||! = 2! = 2, indicates that
there are 2 shortest paths of 2 hops each.
4.1 CLIOD and ALIOD Algorithms
In general, adaptive routing performs better than
deterministic and oblivious routing both for benign and adversary traffics.
Several adaptive routings have been proposed for Generalized Hyper Cube
networks [22].
These routing algorithms can be classified as
minimal and non-minimal routing. The minimal routing uses adaptively the
shortest path between any source and destination pairs. Non-minimal avoids the
traffic by taken longer routes. Valiant routing [32] initially routes to a randomly chosen destination and
then performs minimal routing to the destination. Other non-minimal routing
use information about the network at the source to decide if it is wise to
route minimally or no minimally to adapt to the benign and adversary traffics.
Universal Globally-Adaptive Load-Balanced algorithm [33]
choses between minimal and Valiant routing on a packet-by-packet basis based on
the queue lengths. One can argue the decision to route minimally or not at the
source loses the ability to adapt to the traffic ahead that is dynamically
changing, and in some other instance, it introduces dimensional asymmetry. This
section proposes two minimal routing algorithms that use local information of
the queues to randomly adapt to the traffic. Virtual channels are also
deployed to prevent deadlock.
Any Level Idle Offset Dimension (ALIOD) routing
algorithm, as shown in Figure 4,
alternates between up and side directions until the least common level in the
Z-node is reached, then alternate between down and side directions until the
destination is reached while changing layers to adapt to the traffic. When no
idle offset dimensions are found, the ordered dimension routing is chosen in
the side directions. The alternation is adopted to avoid heavily loaded links
(large queues). On the other hand, the Common Level Idle offset dimensions
(CLIOD) reaches the least common level (LCL) first in the source Z-node
adaptively, and then searches for idle offset dimensions or use ordered
dimension routing and then routes down within the destination Z-node. This
paper shows that ALIOD performs better than CLIOD in all traffic patterns.
CLIOD is an extension to the routing algorithm described for HyperX. ALIOD is described below.
Figure 4.
ALIOD and CLIOD routing paths in the Hyper Z, with the LCL least common level.
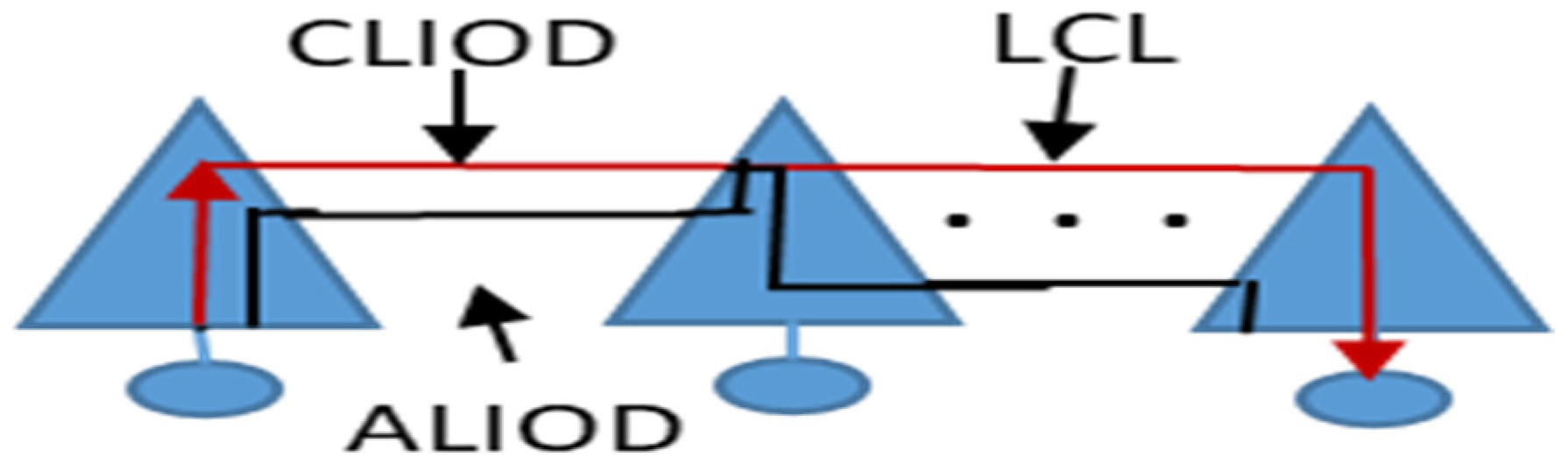

Table 1.
ALIOD Algorithm.
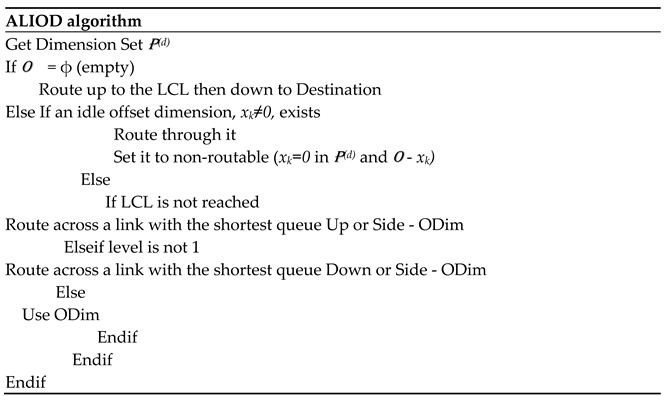
The algorithm is deadlock free. When an idle offset
dimension is found, the messages cross it and move one hop closer to the
destination, without queuing delay. When no idle dimension is found, the
message will use dimension-order routing, ODim, which is known to be deadlock
free. It dynamically exploits a higher path diversity to avoid saturated
links.
5. Performance Evaluation
This section describes the simulation models and
parameters used to evaluate our proposed Z-Fat tree with the routing suggested
in this paper, and provides the explanation of the obtained results.
5.1. Simulation Model
The simulation environment is based on a tool
developed in C++ at the University of Portsmouth in the School of Computing.
The topology consists 1024 processors transmitting
at an effective link rate of 10Gbits/s. All the links in the network have
1-bit propagation delay (.1ηsec). The simulator generates 100000 messages with
an average processing time derived from an exponential distribution. The
processing time, uniformly distributed between 640-3200 ηsec, is the time taken
by the processor to perform some computations before a communication takes
place. The communication used a single Virtual Cut Through (VCT) buffer with
virtual channels to avoid deadlock in each routing node. The average
processing time normalizes the message transmission time to produce different
offered loads per processing node. The payload of the messages is chosen to be
3200bits on average. The normalized delay (average delay/transmission time of a
complete message) is recorded against the offered load, that is a fraction of
the total capacity of the system. The adaptive routing dimension order (ODim),
common level idle offset dimension (CLIOD), any level idle offset dimension
(ALIOD) and the deterministic routing based on DRR are compared in this
simulation.
Standard traffic patterns were used. They are
commonly found in computational intensive scientific applications, namely the
transpose, the bit-reversal and the complement patterns.
5.2 Results of the simulation
Figure 5
(a)(b) and (c) illustrate comparisons of normalized delays for a 2-dimensional
HyperZ with levels 1, 2 and 3 respectively. Notice that level, h=1, represents
the HyperX topology. The ALIOD routing performs better that all the others and
manage to use the levels of the Z-node to avoid traffic built in the queues of
the routing nodes. It outperforms HyperX based on the CLIOD. For higher load,
with higher level, ALIOD achieves a delay of less than 3 times the packet length.
For h=1, the deterministic (Deter) dimension-order routing and (ODim)
are identical. For level h>1, ODim improves slightly by using the
adaptive up direction of the Z-node, based on the tree routing.
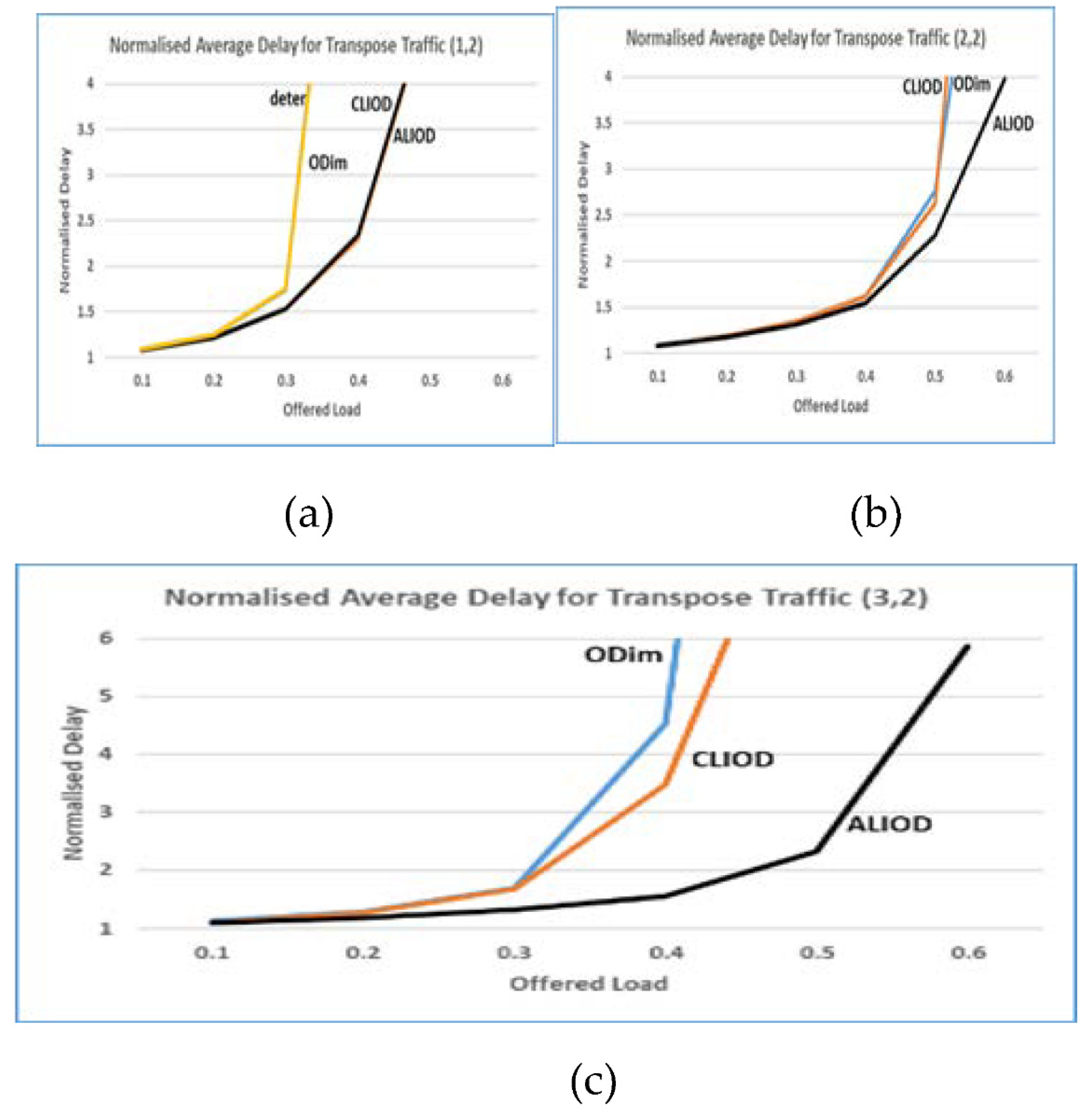
Similar patterns can be observed for transport traffic
in Figure 6 (a)(b)(c). However, CLIOD
and ODim saturate at 40% of offered load. Level 2 shows better performance.
The deterministic is less tolerant to transport traffics and saturates at an
offered load less than 10%, for higher levels.
Figure 5.
Normalized delay for 1024 processors with random pattern.
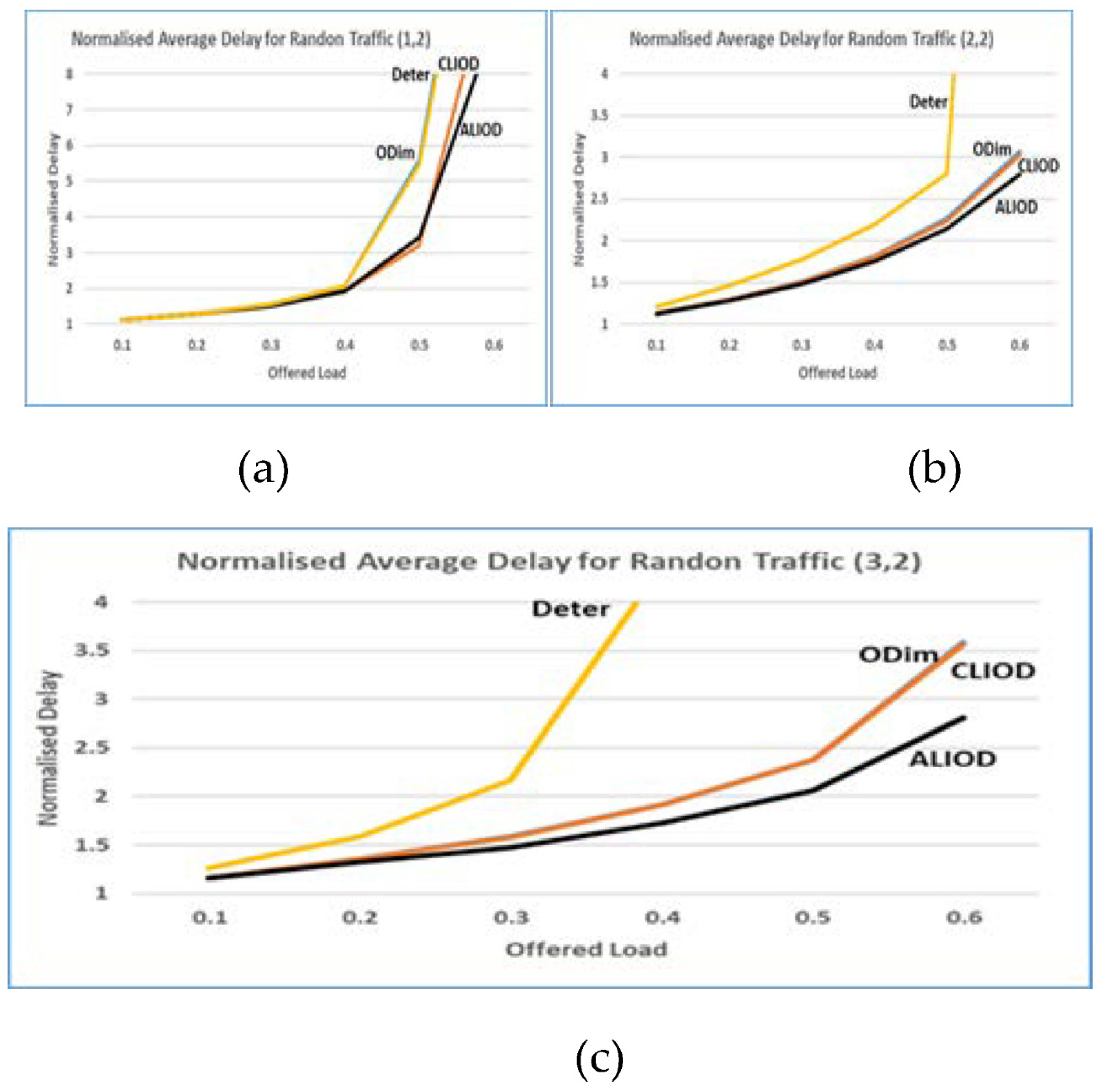
Figure 6.
Normalized delay for 1024 processors with Transpose Traffic.
For bit Reverse traffic shown on Figure 7. (a)(b) at level 2 and 3 respectively
for 2-dimensional (OHG), ALIOD achieves a normalized delay between 2.5 to 3
times the packet length at an offered load of 60%.
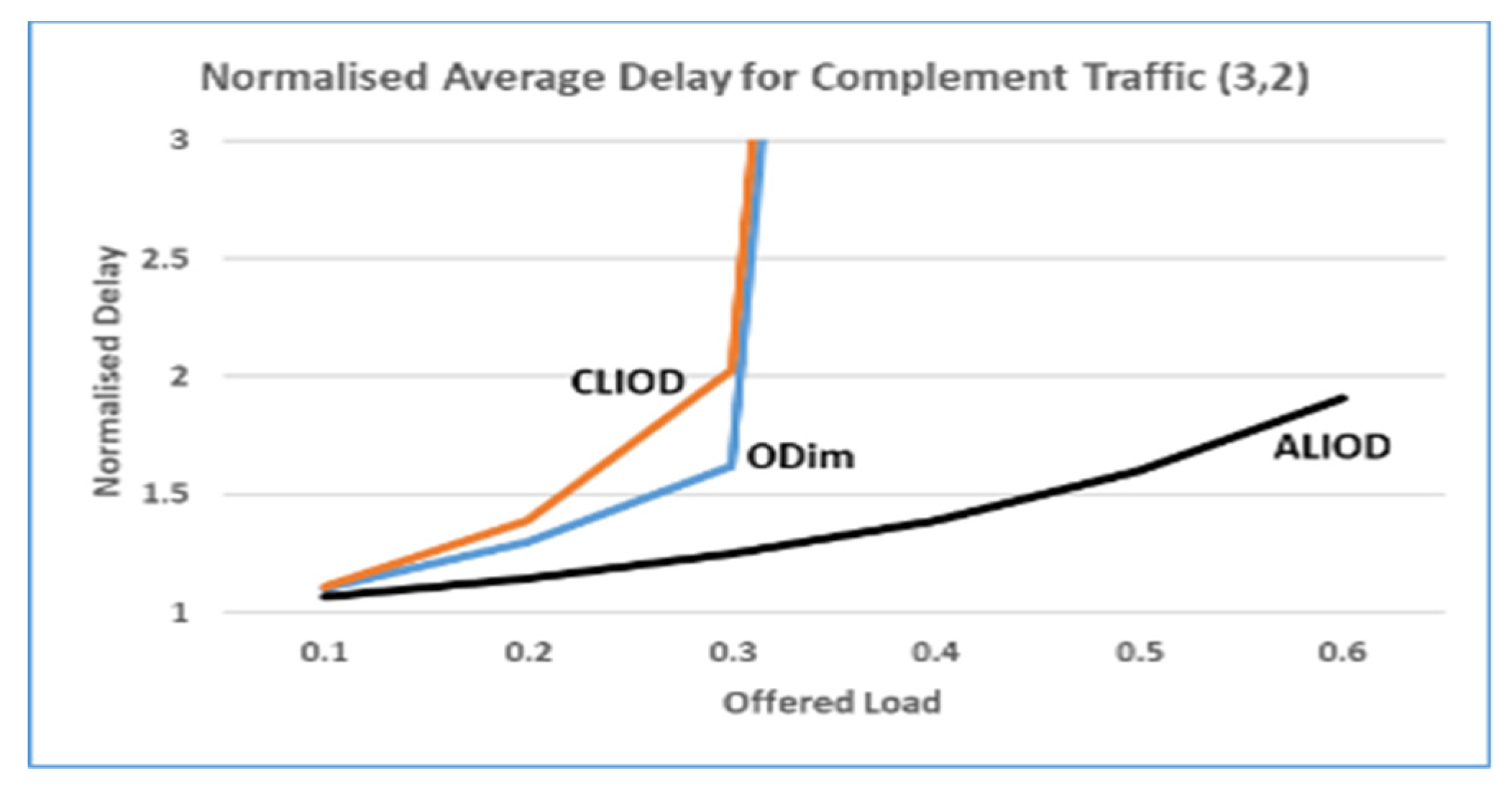
As illustrated in Figure
8, with complement traffic, both CLIOD and ODim saturate at an offered
load of 30%. ALIOD makes use of the up, and side links to divert the traffic.
The deterministic is less tolerant to complement traffics and saturates at an
offered load less than 10%, which is not shown in the graph. Results obtained
in [23] have shown that the HyperX with the
DAL which is similar to CLIOD and ALIOD, when the level of the computational
node, Z-node, is 1, performs well compare to Valiant [32],
ordered dimension, referred to in this paper by ODim, and the fat tree based on
folded Closed–fat tree.
Figure 7.
Normalized delay for 1024 processors with bit-reverse Traffic.
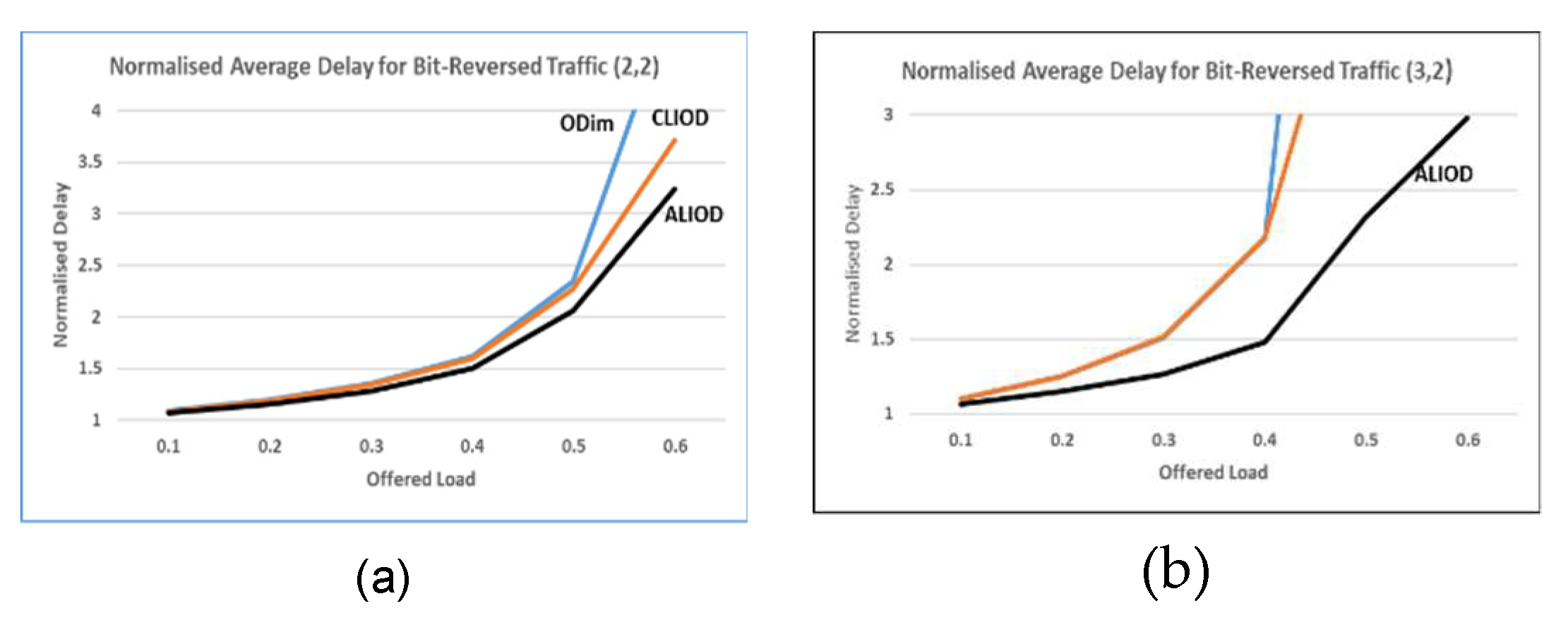
Figure 8.
Normalized delay for 1024 processors with Complement Traffic.
5.3. Scalability
It is possible to build a network with any size,
while maintaining the regularity and the symmetry of hyper Z-Tree. One way to
do it is to create an optimal Z-node with its components - links and switches -
set to some maximum radix that is available in the market. The Z-node can then
be replicated across the dimensions to meet the extended network requirements.
An optimal Z-node, Z2(8,4,8; 1,4,8;
1,2,2), connecting 256 processors is replicated into several H2,2(s1,
s2)(Z2) through the dimensions 1 and 2
giving 1024, 2048, 4096 and 8192 processors with (s1,
s2) = (2, 2), (4, 2), (4, 4) and (8, 4) respectively. For instance, 1024
= s1*s2*256 = 2*2*256. Each network requires
switches of equal radix 18, 20, 22, and 26 ports. The radix of the switch is
chosen as 32, which is the maximum value, and unused ports are switched off.
Larger size networks can be obtained with higher radix switch, or with higher
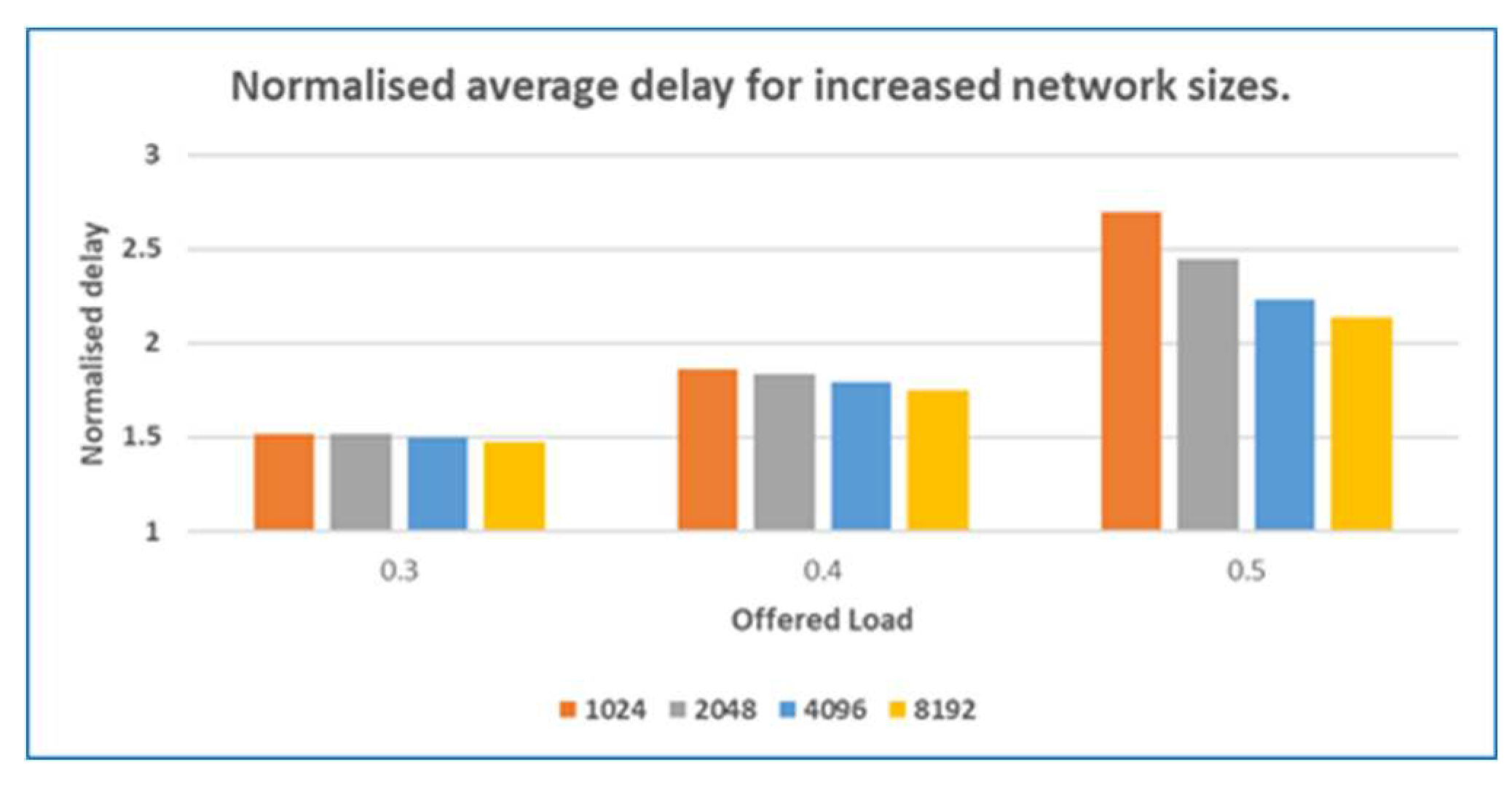
dimensions. The graph in Figure 9 shows
clearly that as the network size increases by replicating the Z2
node across the first and second dimensions, the normalized average delay is
bounded between 1.5 and 3 times the message size.
Figure 9.
Normalized delay for different network sizes with 1024, 2048, 4096 and 8192 processors, level h =2 and dimension d=2, with random pattern, at offered loads 30%, 40% and 50%.
Figure 9.
Normalized delay for different network sizes with 1024, 2048, 4096 and 8192 processors, level h =2 and dimension d=2, with random pattern, at offered loads 30%, 40% and 50%.
5.4. Fault Tolerance
In larger scale networks of millions of connections, the dominant failures come from the links’ failures. The massive path diversity of the HyperZ defined by equation (4) creates many opportunities for fault tolerance. In [22] we have addressed fault tolerance within the Z-node. We proposed a recoiling algorithm to determine the paths of unfaulty links, and hence selected the uplinks that will avoid meeting faulty downlinks. ALIOD is more tolerant to faults than DAL routing. For ALIOD routing, there are h parallel links from one dimension to another, defined by the vector Qk = (q1k, q2k, …, qhk) giving a maximum of links in an offset dimension k. For a message to be blocked due to a link failure, there should be only one remaining offset dimension with all the parallel links, , failing. If the number of failed links is less than , additional rerouting in the up and then down directions within the Z-node is required to locate the level of non-faulty links. This approach is already adopted within the Z-node, [22]. If all the links fail, one has to reroute through the side links. This scheme is adopted by DAL.
6. Conclusions
This paper introduces a multi-level direct network called HyperZ which is an extension to HyperX. The main feature of this architecture is the inclusion of the Z-Tree as a computing node in a GHC interconnection. This topology is driven by the high-radix switches and low diameter. The organization based on a Z-Tree node offers tree-levels that make parallel layers and hence increases the bisection bandwidth, reduce the latency and provide a resilient fault tolerant network. As shown in the resuts, the computing nodes with multi-levels performs better than a single level. This is achieved by the ALIOD routing algorithm which makes better use of the link diversities and the parallel layers. The topology scales with the size of the network by adding more Z-nodes in the first and second dimension; while maintaining the radius constant and for a low (GHC) dimension, the latency can be kept bounded to less than 3 times the message size.
References
- C. Bekas, “Breaking the power wall in Exascale Computing, what is Exascale computing”, Scientific colloquium, of Steinbach Centre for Computing of Karlsruhe Institute of Technology, [Online] Available: http://www.scc.kit.edu/downloads/oko/SCC_Kolloquium_20131114_exascale_computing.pdf 2013.
- D. A. Reed, J. Dongarra, “Exascale Computing and Big Data”, Communications of the ACM, Vol. 58, No. 7, pp. 56-68, July 2015. [CrossRef]
- P. M. Reed, D. Hadka, “Evolving Many-Objective Water Management to Exploit Exascale Computing”, AGU Publications, 0 Oct 2014. [CrossRef]
- J. Torrelas, “Architectures for Extreme-Scale computing”, Computer, IEEE Computer Society, pp. 28-35, Nov 2009.
- J. A. Ang, et all., “Abstract Machine Models and Proxy Architectures for Exascale Computing”, Co-HPC '14 Proceedings of the 1st International Workshop on Hardware-Software Co-Design for High Performance Computing, pp. 25-32, 2014.
- F. Cappelo, et all., “Toward Exascale Resilience”, The International Journal of High Performance Computing Applications, Volume 23, No. 4, pp. 374–388, 2009.
- C. Leiserson, "Fat-trees: Universal networks for hardware-efficient supercomputing", IEEE Transactions on Computers, Vol. 34, No. 10, pp. 892-901, 1985. [CrossRef]
- B. Arimilli, et all., “The PERCS high-performance interconnect,” in Proc. 18th Annu. Symp. High-Perform. Interconnects, pp. 75–82, 2010. [CrossRef]
- Cray Inc., "Cray XK Series Supercomputers | Cray", Cray.com, 2013.[Online].Available:http://www.cray.com/Products/Computing/XK7.aspx. [Accessed: 02- Apr- 2013].
- IBM Bluewaters. “Blue Waters”, NCSA University of Illinois. [Online] Available: https://bluewaters.ncsa.illinois.edu/ [Accessed: 2 Apr 2013].
- R. A. Haring, et all., “The IBM Blue Gene/Q Computer Chip”, IEEE Micro, Vol. 32, No. 2, pp. 48-60, Mar/Apr 2012. [CrossRef]
- IBM Blue Gene team, "Design of the IBM Blue Gene/Q Compute Chip," IBM Journal of Research and Development, Issue 1/2, Jan-Mar 2013. [CrossRef]
- D. Chen, et all. "Looking under the hood of the IBM Blue Gene/Q network", 2012 International Conference for High Performance Computing, Networking, Storage and Analysis, 2012.
- N. Jain, et all. “ Maximizing Throughput on a Dragonfly Network”, SC '14: Proceedings of the International Conference for High Performance Computing, Networking, Storage and Analysis, 16-21 Nov 2014.
- M. Garcia, et all., , “On-the-fly adaptive routing in high-radix hierarchical networks,” in 41st International Conference on Parallel Processing (ICPP), pp. 279–288, 2012. [CrossRef]
- X. ZHU, "Xmesh: A Mesh-Like Topology for Network on Chip", Journal of Software, vol. 18, no. 9, p. 2194, 2007. [CrossRef]
- M. Rahman, Y. Inoguchi, F. Faisal and M. Kundu, "Symmetric and Folded Tori Connected Torus Network", Journal of Networks, vol. 6, no. 1, 2011. [CrossRef]
- M. Nikdast, J. Xu, X. Wu, Z. Wang, X. Wang and Z. Wang, "Fat-tree-based optical interconnection networks under crosstalk noise constraint", IEEE Trans. Very Large Scale Integr. Syst., vol. 23, no. 1, pp. 156-169, 2015. [CrossRef]
- H. Gu, S. Wang, Y. Yang and J. Xu, "Design of Butterfly-Fat-Tree Optical Network-on-Chip", Optical Engineering, 2010. [CrossRef]
- Amir Mansoor Kamali Sarvestani, PHD THESIS "Evaluating Techniques for Wireless Interconnected 3D Processor Arrays", York: University of York, 2013.
- M. Adda, A. Peratikou, “Routing and Fault Tolerance in Z-Fat Tree", IEEE Transaction on Parallel and Distributed Systems, Vol. 28, No. 8, 2017.
- D. Agrawal, “Generalized Hypercube and Hyperbus Structures for a computer”, IEEE Transactions on Computers Vol. 33, No.3, pp. 323-33, 1984.
- J. H. Ahn, N. L. Binkert, R. Schreider “HyperX: Topology, Routing, and Packaging of Efficient Large-Scale Networks”, Proceedings of the ACM/IEEE Conference on High Performance Computing, SC 2009, Nov 14-20, 2009.
- S. Azizi, F. Safaei, N. Hashemi, “On the Topology Properties of HyperX”, the Journal of Supercomputing, Vol. 66, No. 1, pp. 572-593, 2013.
- Mu, Y. & Li, K. (2011). “Extended Folded Cube: A Improved Hierarchical Interconnection Network”. Fourth International Symposium On Parallel Architectures, pp. 77-81. [CrossRef]
- Rahman, M., Inoguchi, Y., Faisal, F. A. & Kundu, M. K. (2011). « Symmetric and Folded Tori Connected Torus Network”. Journal of Networks, 6 (1). [CrossRef]
- N. Kini, M. Kumar and H. Mruthyunjaya, "Torus Embedded Hypercube Interconnection Network: A Comparative Study", International Journal of Computer Applications, vol. 1, no. 4, pp. 32-35, 2010. [CrossRef]
- Rahman, M. H., Jiang, X., Masud, M. & Horiguchi, S. (2009), “Network performance of pruned hierarchical torus network”, Sixth IFIP International Conference On Network and Parallel Computing, Oct 2009.Gold Coast: pp. 9--15.
- Khosravi, A., Khors, I, S. & Akbari, M. K. (2011). “Hyper node torus: A new interconnection network for high speed packet processors”. International Symposium On Computer Networks and Distributed Systems (CNDS, pp. 106--110. [CrossRef]
- Arimilli, B., Arimilli, R., Chung, V., Clark, S., Denzel, W., Drerup, B., Hoefler, T., Joyner, J., Lewis, J., Li, J. & Others (2010). “The PERCS high-performance interconnect”. 18Th IEEE Symposium On High Performance Interconnects., pp. 75--82.
- Faanes G, et Al (2012), “Cray cascade: a scalable HPC system based on dragonfly network”, Proceedings of the International Conference on Computing, Networking, Storage & Analysis. [CrossRef]
- L. G. Valiant (1982), “A scheme for fast parallel communication “, SIAM Journal on Computing, 11(2): 350-361. [CrossRef]
- J. Kim, W. J. Dally, S. Scott & D. Abts (2008), “Technology-Driven, Highly-Scalable Dragonfly Topology”, International Symposium on Computer Architecture.
- A. Peratikou, “An optimised and generalised node for fat tree classes” PhD thesis, School of Computing, University of Portsmouth, Portsmouth, 2014.
- OPNET Technologies “Opnet modeller accelerating network R&D”– Network Simulator | Riverbed", Riverbed, 2016. [Online].
 |
Mo Adda received his PhD degree in parallel and distributed systems from Surrey University, United Kingdom. He is currently a principal lecturer and MSc course leader for cyber security and digital forensics at Portsmouth University and Cambridge (EG). He has also worked for many years, as a senior consultant in the industry for simulation and modeling, where he developed many discreet event simulation tools for shipments and business process modelling. His current research includes parallel architectures, big data analytics, embedded systems, intelligent agents, network management, forensic information technology, network security and IoT forensics and cyber security. He is a member of the IEEE. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



