
Submitted:
27 June 2023
Posted:
28 June 2023
You are already at the latest version
Abstract
This paper presents a method of fusion of identification (attribute) information provided by two types of sensors: combined primary and secondary (IFF) surveillance radars and ESM (Electronic Support Measures). In the first section, the basic taxonomy of attribute identification is adopted in accordance with the standards of STANAG 1241 ed. 5 and STANAG 1241 ed. 6 (draft). These standards provide the following basic values of the attribute identifications: FRIEND, HOSTILE, NEUTRAL, UNKNOWN and additional values: ASSUMED FRIEND and SUSPECT. The basis of theoretical considerations is Dezert-Smarandache theory (DSmT) of inference. The paper presents and practically uses for combining identification information from different ESM sensors and radars six information fusion rules proposed by DSmT - the Proportional Conflict Redistribution rules (PCR1, PCR2, PCR3, PCR4, PCR5 and PCR6). In the paper, rules of determining attribute information by ESM sensor equipped with the data base of radar emitters are presented. It was proposed that each signal vector sent by the ESM sensor contained an extension specifying a randomized identification declaration (hypothesis) - basic belief assignment (BBA). The paper also presents a model for determining the basic belief assignment for a combined primary and secondary radar. Results of the PCR rules of sensor information combining for different scenarios of radio-electronic situation (deterministic and Monte Carlo) are presented in the final part of the paper. They confirm the legitimacy of the use of Dezert-Smarandache theory into information fusion for primary radars, secondary radars and ESM sensors.
Keywords:
information fusion
; Dezert-Smarandache theory (DSmT) of inference
; conflict redistribution rules
; radar emitters recognition
; electronic support measures (ESM)
; primary and secondary radars
1. Introduction
The paper is devoted to the fusion of identification information from ESM sensors and combined primary and secondary radar (IFF) using the rules of Dezert-Smarandach theory (DSmT) called proportional conflict redistribution rules.
The first part of the paper presents the applied interpretation of attribute identification in accordance with the NATO STANAG 1241 standard. It should be noted that this is one of the possible interpretations of the adopted definitions. It leads to the Bayesian model of the basic belief assignment.
The identification classification method depends on the organization that operates the ESM sensors. In the paper, one assumes that the sensor identification classification is consistent with the NATO STANAG 1241 standard [1,2]. In addition, one assumes that five identification classes are used - three primary and two secondary ones. Sensors can transmit identification information in the form of a hard decision, sometimes determined as non-randomized, or a soft decision, sometimes determined as a randomized decision. In the paper, one assumes that the sensors send identification information to the system in a randomized form, i.e. in the form of basic belief assignment on the set of identification classes. This assignment determines the sensor's belief that the detected emitter belongs to separate identification classes.
The next part of the paper presents the mathematical form of the DSmT conflict proportional redistribution rules PCR1, PCR2, PCR3, PCR4, PCR5 and PCR6 [3, 4] for two sensor inputs and PCR5 and PCR6 for three sensor inputs, assuming the Bayesian model of the basic belief assignment of hypothesis.
The next two sections show how to determine the basic belief assignment for combined primary and secondary (IFF) radar and ESM sensors.
Combined primary and secondary (IFF) radars are the main source of identification information about air and maritime objects. A primary radar allows only to detect an object in a supervised area. The detection of the object is the precondition for sending a request to the object by the secondary radar (interrogator). Interpretation of the object response is dependent on the type of request. The so-called civilian modes allow only to determine whether the detected object replies to an interrogation or not. The paper presents a method for determining the basic belief assignment of airborne targets moving in observation space of combined primary and secondary (IFF) radars sensor.
ESM (electronic intelligence - electronic support measures) electronic surveillance sensors consist of passive receivers and direction-finders, which allows them to capture emitter signals coming from certain directions. In this way, the electronic recognition system can receive, among others, information on radar emitters mounted on air or maritime platforms. Reports sent from the ESM sensors include, among others, the characteristics of the intercepted signal, the emitter's azimuth and the so-called identification information.
The paper also assumes that sensors are equipped with specialized databases called the databases of emitter signal patterns, in which information about previously captured, processed, analyzed, recognized and described radar emitter signals is stored along with additional information about the type and mode of the emitter work, the platform on which these emitters can be installed, and the national or organizational affiliation of these platforms. The detected signals are the subject of an analysis procedure, which allows to determine the so-called distinctive features of the signal and then assigning this information to a specific electronic entity (already existing or created ad hoc) [5]. The basis for assigning distinctive information to an electronic entity is the azimuth angle of the incoming signal.
In the case of a high density of targets, identification information may fluctuate due to incorrect assignment of signal information to the electronic entity [6]. The impact of this negative phenomenon can be significantly reduced by an efficient estimation of the emitter positions [7]. Assuming that sensors send all reports on the tracked electronic entities to the superior operation center in the electronic recognition system, such a center (in the paper called the information fusion center (IFC) can perform the fusion function of the identification information. The fusion of identification information ensures the greater stability of this information - resistance to accidental changes in sensor decisions.
Each sensor report sent to the fusion information center contains a vector of belief mass for all attribute identification values. Results of the Proportional Conflict Redistribution sensor information combining rules for selected deterministic and Monte Carlo scenarios are presented in the final part of the paper. The identification information fusion can be realized based on three basic theories - Bayesian theory of inference, Dempster-Shafer theory - called the theory of evidence and Dezert-Smarandache theory. The methods of Dezert-Smarandache information fusion are used in this paper. In addition, their effectiveness is compared with the Dempster's rule of inference.
At the end of the paper conclusions are given. They confirm the legitimacy of the use of Dezert-Smarandache theory into information fusion for primary radars, secondary radars and ESM sensors.
2. Interpretation of attribute identification according to STANAG 1241
The set of possible values of attribute identifications used by sensors can be adopted based on standardization documents of organizations that exploit these sensors [1,2,8,9,10].
This paper assumes a basic taxonomy of identification in accordance with the draft of STANAG 1241 ed. 6 [2]. To other similar documents one may include the following standards: STANAG 4420 and STANAG 1241 ed. 5, which provide the following basic values of the attribute identifications:
- FRIEND (F),
- HOSTILE (H),
- NEUTRAL (N),
- UNKNOWN (U).
Each of these documents contain their own definitions of the declarations.
The following definitions of these basic values of the attribute identification are used in the paper (in accordance with [2]):
- FRIEND - an allied/coalition military track, object or entity; a track, object or entity, supporting friendly forces and belonging to an allied/coalition nation or a declared or recognized friendly faction or group,
- HOSTILE - a track, object or entity whose characteristics, behavior or origin indicate that it belongs to opposing forces or poses a threat to friendly forces or their mission,
- NEUTRAL - a military or civilian track, object or entity, neither belonging to allied/coalition military forces nor to opposing military forces, whose characteristics, behavior, origin or nationality indicates that it is neither supporting nor opposing friendly forces or their mission,
- UNKNOWN - an evaluated track, object or entity, which does not meet the criteria for any other standard identity.
These standards bring additional values of the attribute identification:
- ASSUMED FRIEND,
- SUSPECT.
One should pay attention on these two recent identities contained in [1] as well as their definitions [2]:
- ASSUMED FRIEND - a track, object or entity which is assumed to be friend or neutral because of its characteristics, behavior or origin,
- SUSPECT - a track, object or entity whose characteristics, behavior or origin indicate that it potentially belongs to opposing forces or potentially poses a threat to friendly forces or their mission.
3. Fusion of information from the ESM sensors and radars in the information fusion center (IFC)
3.1. Diagram of the process of information fusion for two sensors in the information fusion center
In this work, it is assumed that ESM sensors send messages asynchronously to the information fusion center. These reports contain sensor decisions regarding the identification of objects emitting detected signals. The set of possible identifications is following:
wherein the following interpretation is used:
θ1 - FRIEND (F),
θ2 - HOSTILE (H),
θ3 - NEUTRAL (N),
θ4 - ASSUMED FRIEND(AF),
θ5 - SUSPECT(S).
θ6 - UNKNOWN (U),
According to Figure 1, the hypotheses are mutually exclusive, i.e.
Each sensor with the number i () sends its decisions as so-called soft decisions, i.e. as BBA measure vectors (BBA - basic belief assignment)
One should also introduce a vector of generalized BBA measures for the information fusion center
The paper adopts the Bayesian BBA model due to the fact that this model has been adopted as valid in the STANAG 4162 standard [9]. This means that equation (5) applies in addition to (1) and (2).
The first case will be considered when two sensors send, asynchronously in one cycle, one report each containing decisions regarding the BBA related to the target. The IFC system, after receiving the report from the sensor, fuses the information contained in the two vectors: in the current generalized BBA vector , and in the BBA vector from sensor 1 or in the BBA vector from sensor 2.
The information fusion procedure performed in the IFC is carried out in accordance with the following formula:
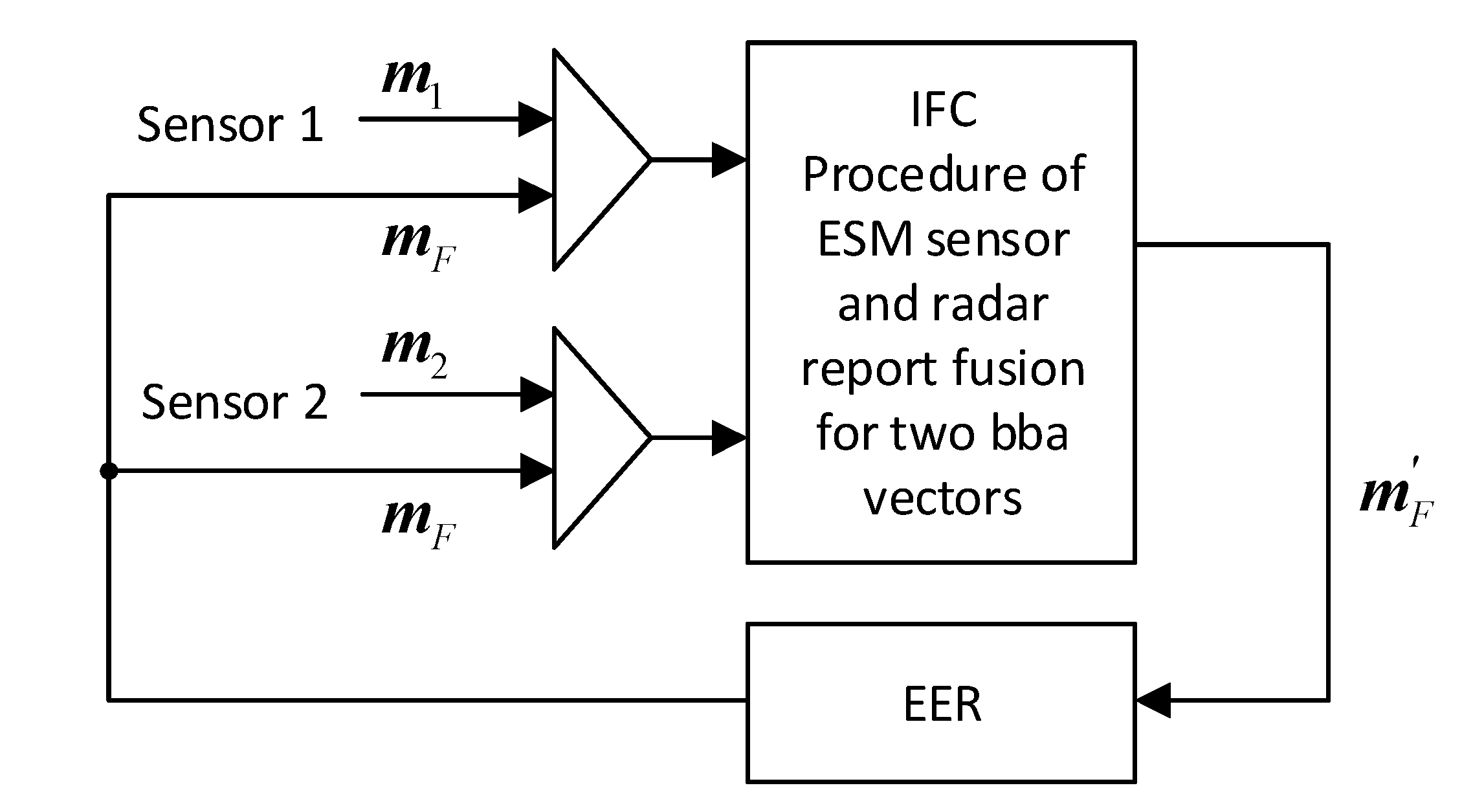
wherein is a vector of the generalized BBA measure determined by the rule based on the previous generalized BBA measure vector and the new BBA measure vector sent by the i-th sensor. The diagram of the identification information fusion from the ESM sensors is shown in Figure 2.
Figure 1.
The diagram of the information fusion process in the information fusion center IFC for two sensors. Explanations: mi – BBA measure vector of i-th sensor, mF – generalized BBA measure vector that is a part of the electronic entity record in IFC, EER – electronic entity record in IFC database.
Figure 1.
The diagram of the information fusion process in the information fusion center IFC for two sensors. Explanations: mi – BBA measure vector of i-th sensor, mF – generalized BBA measure vector that is a part of the electronic entity record in IFC, EER – electronic entity record in IFC database.
The second case will be considered when two sensors send, asynchronously in one cycle, one report each containing decisions regarding the BBA related to the target. The IFC system waits for reports from both sensors in one cycle, using registers. Only when both registers are full, the IFC system performs a fusion of the information contained in three vectors: BBA vector , and BBA vector from sensor 1, and BBA vector from sensor 2. It should be noted that this method has a drawback - the information stored in registers are losing credibility.
In this case, the information fusion procedure performed in the IFC is carried out in accordance with the following formula:
wherein is a vector of the generalized BBA measure determined by the rule based on the previous generalized BBA measure vector and the new BBA measure vectors and sent by both sensors. The diagram of the identification information fusion from the ESM sensors is shown in Figure 3.
In the further part of the paper, the combination rules of the BBA vector from the i - th sensor and the generalized BBA vector in the CFI are described.
3.2. The rules of combination of BBA measures vectors
This section presents formulas defining various combination rules for calculating basic belief assignments for the system shown in Figure 2 and Figure 3. The general forms are described in details in [4,11,12]. The information fusion rules of the DSm theory are presented below with the following constraints:
- the properties of a set of hypotheses are described by the formulas (1) and (2),
- for the first scheme (Figure 2), the information fusion procedure handles two information inputs: on one input, reports from two ESM sensors appear alternately, on the second input, electronic entity records from IFC database appear,
- for the second scheme (Figure 3), the information fusion procedure handles three information inputs: on the first input, reports from a combined primary and secondary surveillance radar appear, on the second input, reports from a ESM sensor appear, on the third input, electronic entity records from IFC database appear.
Dempster’s rule
Dempster’s rule [13,14] of the BBA measure vector mi sent by the i-th sensor and the generalized BBA measure vector mF s in IFC is described for each θj ∈ Θ by the following formula:
wherein the degree of conflict is defined by the formula:
while
One could notice that
From (12) it follows that if
then the degree of conflict is full.
If
then there is no conflict.
is Dempster-Shafer fusion result if and only if the denominator of the expression (8) is non-zero, i.e. the degree of conflict is less than 1.
The Proportional Conflict Redistribution rule PCR1
PCR1 rule is the simplest and the easiest version of proportional conflict redistribution rule. The concept of the PCR1 rule assumes the calculation of the total conflicting mass (not worrying about the partial conflicting masses). The total conflicting mass is redistributed to all non-empty sets of hypotheses proportionally with respect to their corresponding non-empty column sum of the associated mass matrix. The PCR1 rule is defined for every non-empty hypothesis in the following way:
where is the non-zero sum of the column corresponding to the hypotheses in the mass matrix
specified by the formula
where:
- (i=1,2) is a row vector of the basic belief assignments masses of the i-th sensor's hypotheses ,
- is a row vector of the basic belief assignments masses of the IFC system’s hypotheses,
- is the degree of mass conflict specified by the formula
- is the sum of all non-zero column sums of all non-empty sets
In our case because
In addition
The Proportional Conflict Redistribution rule PCR2
In PCR2 rule, the total conflicting mass is distributed only to the non-empty sets involved in the conflict (not to all non-empty sets) and taken proportionally with respect to their corresponding non-empty column sum.
A non-empty set is considered involved in the conflict if there exists another set which is neither included in nor includes such that and . The PCR2 rule is defined for every non-empty hypothesis in the following way:
where
Formula (23) can be written differently in the form (25), taking into account the definition of involvement in a conflict and formula (24) [12]:
is the non-zero sum of the column corresponding to the hypotheses in the mass matrix M (16) specified by the formula
where:
- (i=1,2) is a row vector of the basic belief assignments masses of the i-th sensor's hypotheses ,
- is a row vector of the basic belief assignments masses of the IFC system’s hypotheses,
- is the degree of mass conflict specified by the formula (18),
- is the sum of all non-zero column sums of all non-empty sets only involved in the conflictwhereand is defined by (24).
In addition
It will be shown below that in the case of data used in numerical experiments (section 6) , this means that the PCR2 rule is equivalent to the PCR1 rule. The BBA vectors used there contain values less than 1, which means that
It follows that each BBA vector contains at least two non-zero components, that is such that
From (31) and (32) it follows that if , then there exists at least one value such that , which can be written in the following form
From (33) it follows that
The same applies:
Taking into account (34), (35) and (25) one can obtain
From (36) and (37) it follows that
This means that any hypothesis with a non-zero BBA value for any of the two sensors is involved in a conflict.
From (27) it follows that
Using (36), (37) and (40), the value will be determined.
Because
we get
Considering (43), it can be said that in this case the PCR2 rule is equivalent to the PCR1 rule. For this reason, the results of the PCR2 rule are not presented in section 6, as they would be identical to the results of the PCR1 rule because we work only with Bayesian BBAs in this application.
The Proportional Conflict Redistribution rule PCR3
In PCR3 rule, one distributes the partial conflicting masses, instead of the total conflicting mass , to the non-empty sets involved in the partial conflict. If an intersection is empty, for instance , then the mass of the partial conflict is transferred to the non-empty sets and proportionally with respect to the non-zero sum of masses assigned to and respectively to by the BBAs and . The PCR3 rule works if at least one set between and is non-empty and its column sum is non-zero.
The PCR3 rule is defined for every non-empty hypothesis in the following way:
where
is the non-zero sum of the column corresponding to the hypotheses in the mass matrix M (16) specified by the formula
The Proportional Conflict Redistribution rule PCR4
The PCR4 rule redistributes the partial conflicting masses only to the sets involved in the partial conflict in proportion to the non-zero mass sum assigned to and by the conjunction rule according to the following formula:
where
wherein
If at least one of BBAs or is zero, the fraction is discarded and the mass is transferred to and proportionally with respect to their non-zero column sum of masses .
The Proportional Conflict Redistribution rule PCR5 for two BBAs (two sources)
Similarly to PCR2-PCR4 rules, PCR5 redistributes the partial conflicting mass to the hypothesis involved in the partial conflict. PCR5 provides the most mathematically precise [4,11,12] redistribution of conflicting mass to non-empty sets in accordance with the logic of the conjunctive rule. However, it is more difficult to implementation. The PCR5 rule is defined for every non-empty hypothesis in the following way:
where
wherein
In the formula (52), the component is equal to zero if both denominators are equal to zero. In the formula (53), if a denominator is zero, then component is discarded.
The Proportional Conflict Redistribution rules PCR5 and PCR6 for three BBAs (three sources)
In [11,12] improved proportional conflict redistribution rules of combination of basic belief assignments PCR6, PCR5+ and PCR6+ are presented. The authors point out that these rules should be applied if and only if we are to combine more than two BBAs. If we have only two BBAs to combine (s = 2) we always get mPCR5 = mPCR5+ = mPCR6 = mPCR6+ because in this case the PCR5, PCR5+, PCR6, and PCR6+ rules coincide. Below are the formulas that define the PCR5 and PCR6 rules for 3 BBAs.
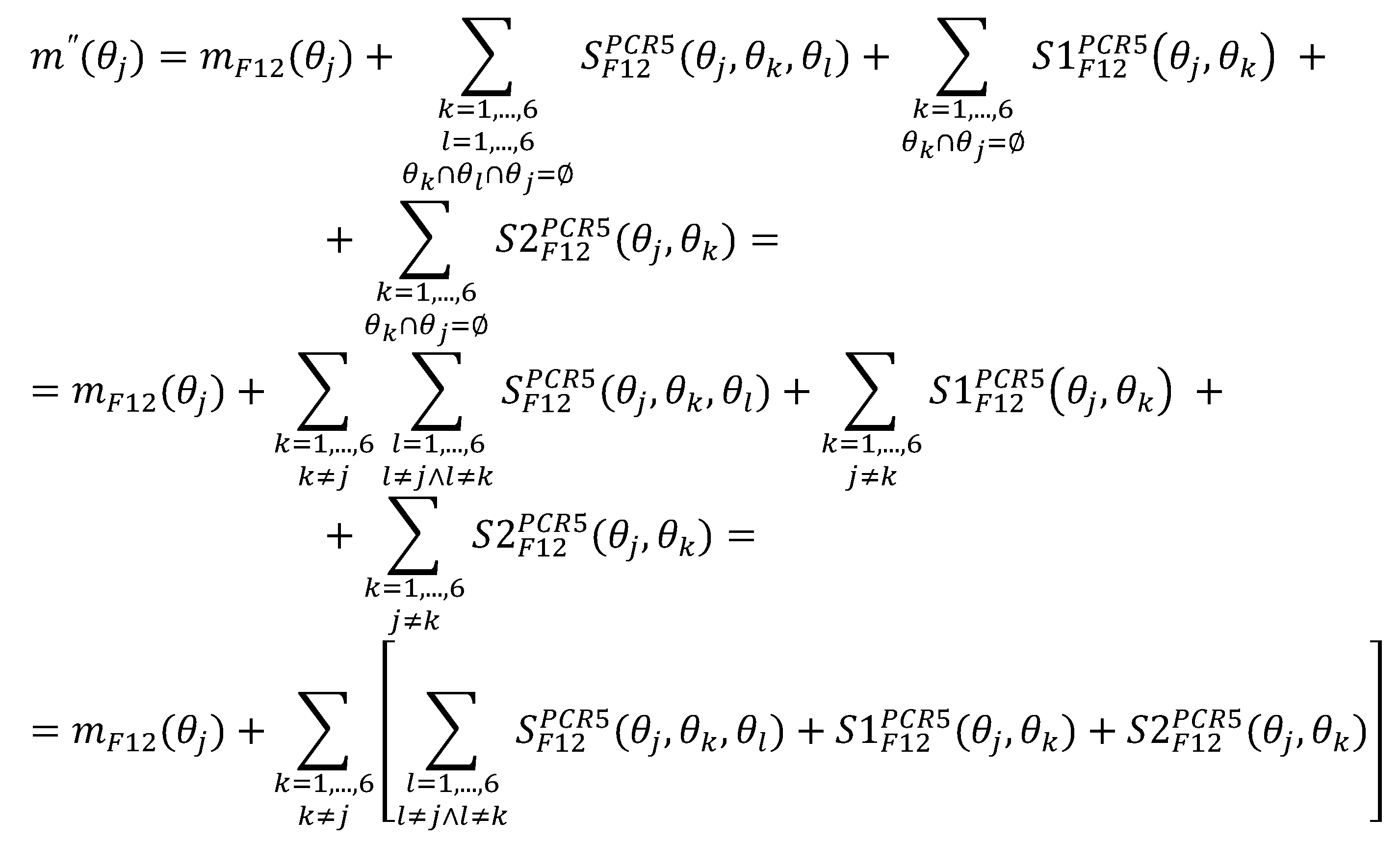
The PCR5 rule for three BBAs (three sources) is defined for every non-empty hypothesis in the following way:
wherein
 (56)
(56)In the formulas (57)-(59), if a denominator is zero, then component is discarded.
The quotient in the formula (55) ensures the normalization of the BBA vector , which ensures that
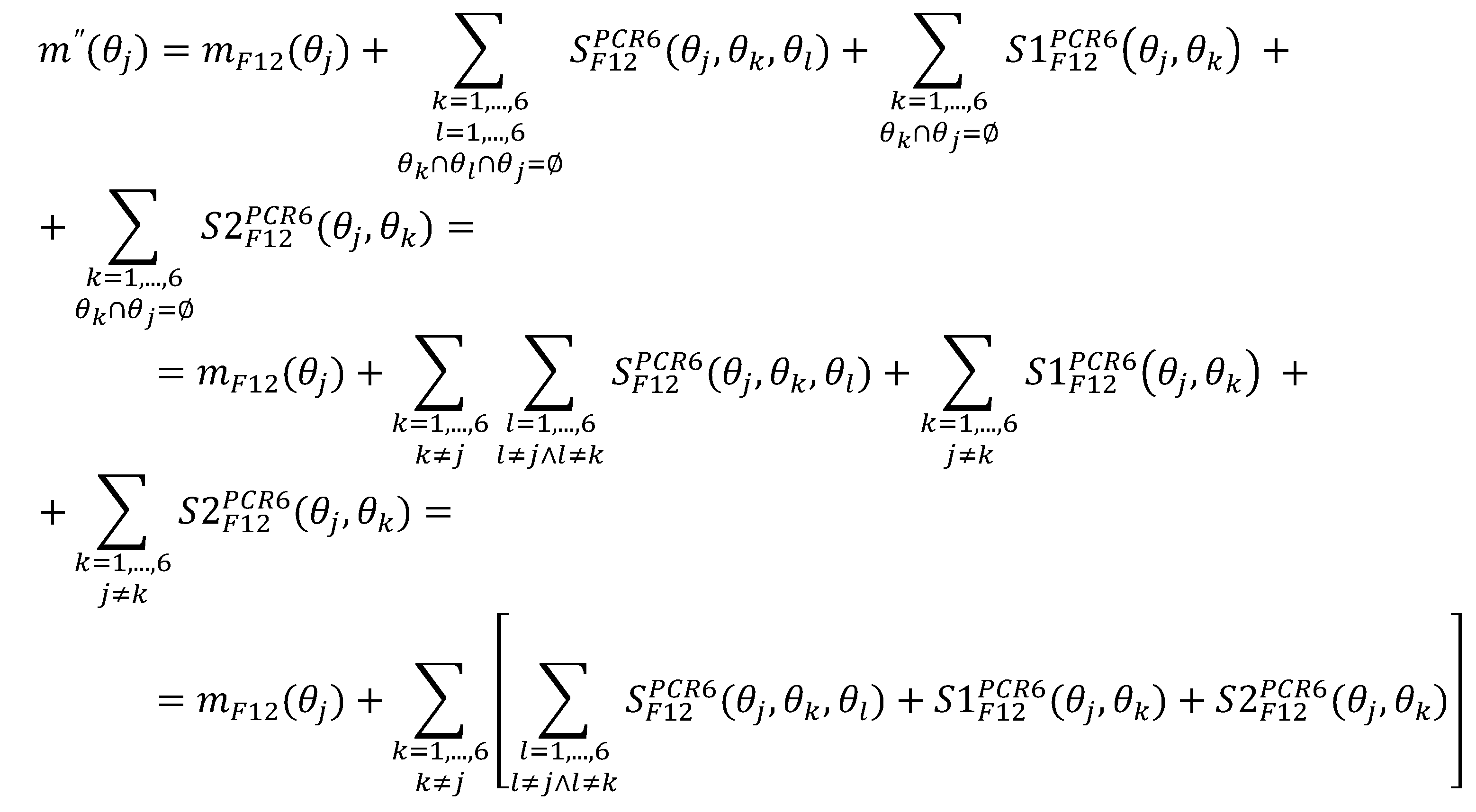
The PCR6 rule for three BBAs (three sources) is defined for every non-empty hypothesis in the following way:
wherein
 (62)
(62)with
and
In the formulas (63)-(65), if a denominator is zero, then compent is discarded.
The quotient in the formula (61) ensures the normalization of the BBA vector , which ensures that
Comparing the two fusion schemes (Figure 2 and Figure 3), it should be noted that sequential and global information fusion generally produces different results [4], i.e.
In addition, the article experimentally verified the theorem on the inequality of the results of both PCR5 and PCR6 rules for three BBAs (three sources) presented in [4]:
4. Basic belief assignment for combined primary and secondary surveillance radars
The paper assumes that the analyzed radar sensor consists of two radars: primary and secondary. Therefore, the probability of correct detection and correct identification of a target is expressed by the following formula:
where Pd is the probability of correct detection of target by a primary radar and PIFF is the probability of correct reply for interrogation. If a target has been detected by the primary radar and there is a lack of proper identification by the secondary radar one can assume that the target has a value of attribute identification of UNKNOWN - U. So, one can write the following relation:
where m(U) is the mass of probability for a value of UNKNOWN identification attribute.
The way of allocation of the remaining mass of probability (1 - m(U)) will be described in this section. One assumes there that every simulated target should have a base value of attribute identification from the set
where:
- NB – base NEUTRAL identity,
- FB – base FRIEND identity,
- HB – base HOSTILE identity.
STANAG 1241 introduces in addition to the basic set of attribute identification values also secondary (additional) attribute identification values: SUSPECT (S) and ASSUMED FRIEND (AF). According to Figure 1 one can introduce a table of possible attribute values transitions between set (10) and the set of secondary attribute identification values:
Base identification
Belief mass values contained in the Table 1 determine how the mass of the base belief assignment has been transformed into the mass of the secondary belief assignment. They can be estimated as empirical frequencies based on recorded archive events.
Of course, have the normalization conditions satisfied:
and
The final values of the belief mass of secondary attribute identification values are calculated according to the formulas:
- For a target with the FRIEND base value of an attribute identification
- For a target with the NEUTRAL base value of an attribute identification
- For a target with the HOSTILE base value of an attribute identification
Other final values of the belief mass of secondary attribute identification values are equal zero.
5. Basic belief assignment for ESM sensors
An ESM sensor is a passive sensor that captures incoming electromagnetic signals generated first of all by radar emitters mounted on air or maritime platforms. This sensor recognizes radar signals determining values of their distinctive features. In this paper we will not deal with methods of radar signals recognizing in details. However, we will use information about these methods to identify platforms generating the signals according to STANAG 1241 – NATO Standardization Agreement and Dezert-Smarandache theory. As previously it was stated, we are interested in three basic values of identification: friend, hostile and neutral, and two secondary values: suspicious and assumed friendly. In addition, we will assume that in some situations it is not possible to determine the identity of the emitter carrier platform. To clarify this issue, we should briefly describe the method of determining the identification of the emitter carrier platform that generated the captured signal. The sensor recognition system is equipped with a database that can be divided into three components: a platform database, an emitter list and a geopolitical list [10]. The platform database (PDB) contains information about platforms that can be met in the area of interest along with their equipment with emitters. The emitter name list (ENL) includes all emitters corresponding to each platform of the PDB and contains the values of the signal distinctive features for each emitter. The values of distinctive features are the basis for the procedure of recognizing a captured signal. The geopolitical list (GPL) provides the allegiance of various countries and platforms and allows to identify them in accordance with STANAG 1241.
The algorithm of signal recognition is realized in two stages:
- Verification at the level of signal quality features. The second stage is executed after a positive assessment of the conformity of quality features.
- The signal recognition procedure determines the distances between the distinctive features of the recognized signal and the distinctive features of all pattern signals stored within the emitter list.
Let us introduce the following notation:
- vector of distinctive features of the recognized signal,
- vector of distinctive features of i-th pattern signal (i – the number of the pattern signal, ),
- the distance between the distinctive features vector of the recognized signal and the distinctive features vector of i-th pattern signal; the distance is the Mahalanobis distance taking into account the correlations of the distinctive features.
The signal recognition classifier compares the distance with the acceptable positive distance of the classification . The distance is the limit that we will interpret as a boundary of emitter pattern recognition. We will divide the set of pattern signals into two subsets: the patterns satisfying the positive classification condition in relation to the recognized signal s – and the patterns that do not satisfy the positive classification condition – . The formal definition is as follows:
In the paper we propose the following method of determining the basic belief assignment on a set of pattern signals, which is related to the distance between a signal and a pattern in the distinctive features space:
As one can see from the formula (75) if then , whereas if then . The above measure is not normalized, hence we will normalize it
The sum of the measures assigned to all the emitters, whose distinctive features lie outside the limit , will be treated as a measure assigned to the base hypothesis “unknown” (U)
To determine the belief measure of other base hypotheses (H, F, N) and secondary hypotheses (AF and S), we should introduce formal definitions of sets contained in the sensor database and used for recognition of captured signals. As it was mentioned above the set of all the necessary data for platform identification can be divided into three sets: PDB – a platform database, ENL – an emitter name list and GPL – a geopolitical list:
PDB – the platform database contains information about all platforms observed in the area of interest, including information on all emitters mounted on each platform; we assume that one platform can have many emitters and the same type of emitters can be installed on many platforms; the PDB contains also information on the national affiliation of each platform,
ENL – the emitter name list is a set of information about all recognized emitters in the area of interest; this set contains the mean values of the distinctive features of emitter signals (so-called signal patterns) and their standard deviations,
GPL – the geopolitical list contains base values of identification attributes (H, F, N) assigned to the various countries.
We will also introduce additional notations used in this paper:
PDBL – the list of platform numbers that are stored in the PDB,
PL(i) – the set of numbers of platforms which have the emitter with number “i”,
IPL(j) – the base identification attribute of the platform with number “j” determined on the basis of the information contained in PDB and ENL ( ).
The set of signal patterns satisfying the positive classification condition in relation to the recognized signal s denoted as can be divided into disjunctive subsets according to the values of the carrier platform identification features:
Each subset of the set for the base identification is defined as follows:
In a similar way, one can define subsets of the set for the secondary identification (AF, S):
One can notice we assume in this paper that no emitter type can be installed simultaneously on platforms with identifications F and H:
Introducing the definition of subsets of the set allows us to determine the belief masses for all identification features:
It should be emphasized that the method presented here is different than in [6,17]. These papers assume that ESM sensors can only generate basic declarations with attribute values FRIEND, HOSTILE and NEUTRAL but in this paper, we assume, that ESM sensors can generate declarations from an extended set of attribute values (additionally ASSUME FRIEND, SUSPECT and UNKNOWN).
6. Numerical experiments of fusion of identification information from ESM sensors
6.1. Simulation scenarios
The paper [6] presents a typical simulation scenario for testing the identification information fusion. The authors formulated several requirements that should be met by such a scenario. It should:
- 1)
- adequately represent the known ground truth of the emitter identification,
- 2)
- include sufficient numbers of incorrect associations to be realistic and to test the robustness of the rules to temporary incorrect sensor decisions,
- 3)
- provide only partial knowledge about the ESM sensor declarations, and thus contain uncertainty,
- 4)
- allow to show stability in case of countermeasures,
- 5)
- allow to switch identification when the ground truth changes.
The authors [6] propose the following parameters of the scenario:
- 1)
- ground truth of identification is FRIEND (F) for the first 50 iterations of the scenario and HOSTILE (H) for the last 50 iterations,
- 2)
- the number of correct associations is 80% of all iterations, the number of incorrect associations caused by countermeasures is 20% of all iterations in a randomly selected moments of time,
- 3)
- ESM sensor declarations have a mass of 0.7 for the most credible identification and 0.3 for the identification of UNKNOWN (U).
The assumption 5) is not considered in this paper, assuming that the real object does not change its real identity while performing the mission. Therefore, assumption 1) regarding scenario parameters becomes obsolete.
The following assumptions concerning the parameters of the scenario are made in this paper:
- 1)
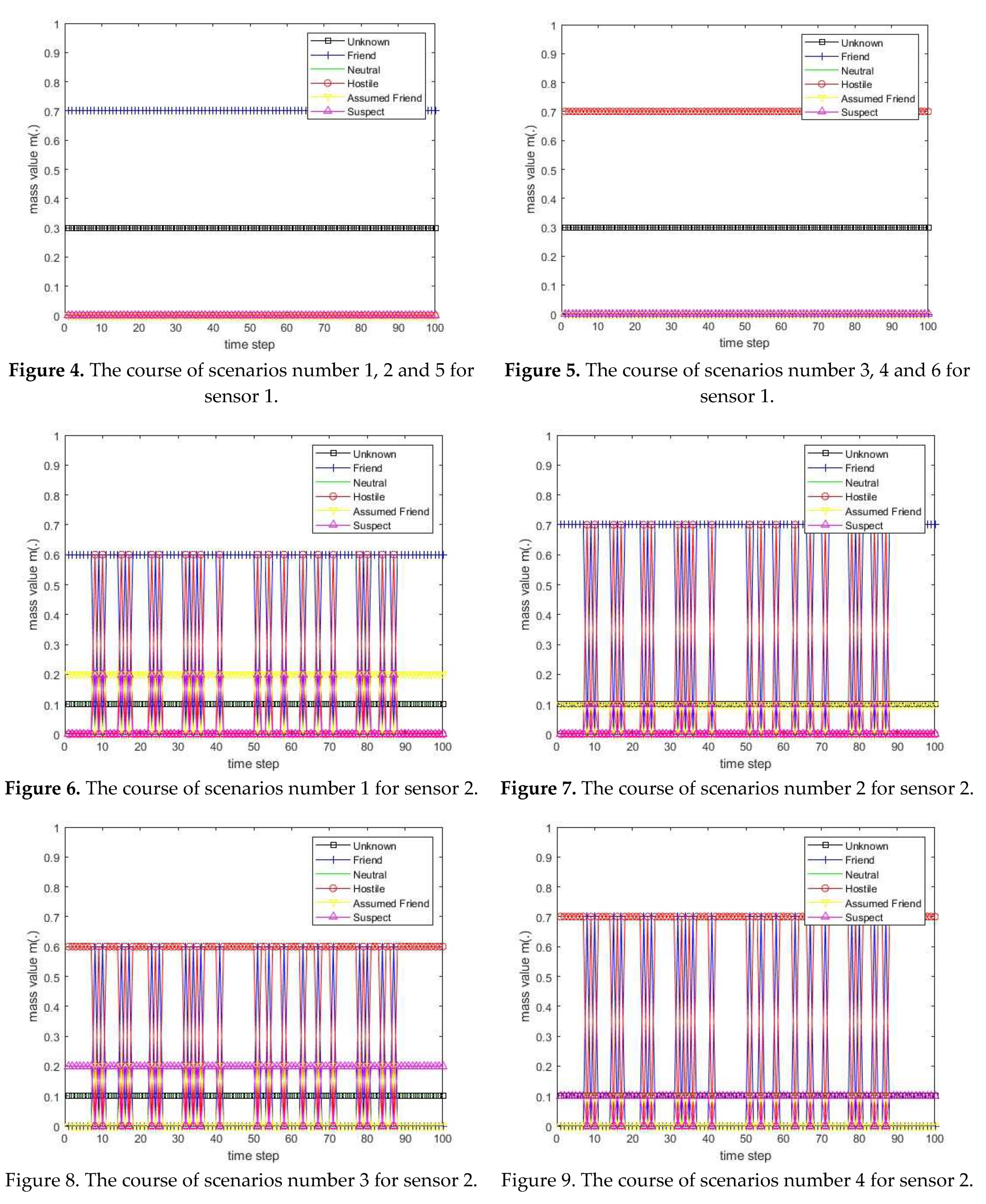
- the real value of identification is constant in each scenario and is equal to FRIEND (F) – in the scenarios 1, 2 and 5 and HOSTILE (H) - in the scenarios 3, 4 and 6;
- 2)
- the above declarations are transmitted by sensor number 1 with the real identification mass equal to 0,7 and the mass of complementary identification (UNKNOWN) equal to 0,3;
- 3)
One should note that scenario 2 differs from scenario 1 with a greater belief mass assigned to incorrect identification of the recognized emitter. The scenarios 3 and 4 are similarly different.
Scenarios 1-6 for the sensor 1 have been presented in Figure 4 and Figure 5. All deterministic scenarios for the sensor 2 have been presented in Figures 6–9.
This section may be divided by subheadings. It should provide a concise and precise description of the experimental results, their interpretation, as well as the experimental conclusions that can be drawn.
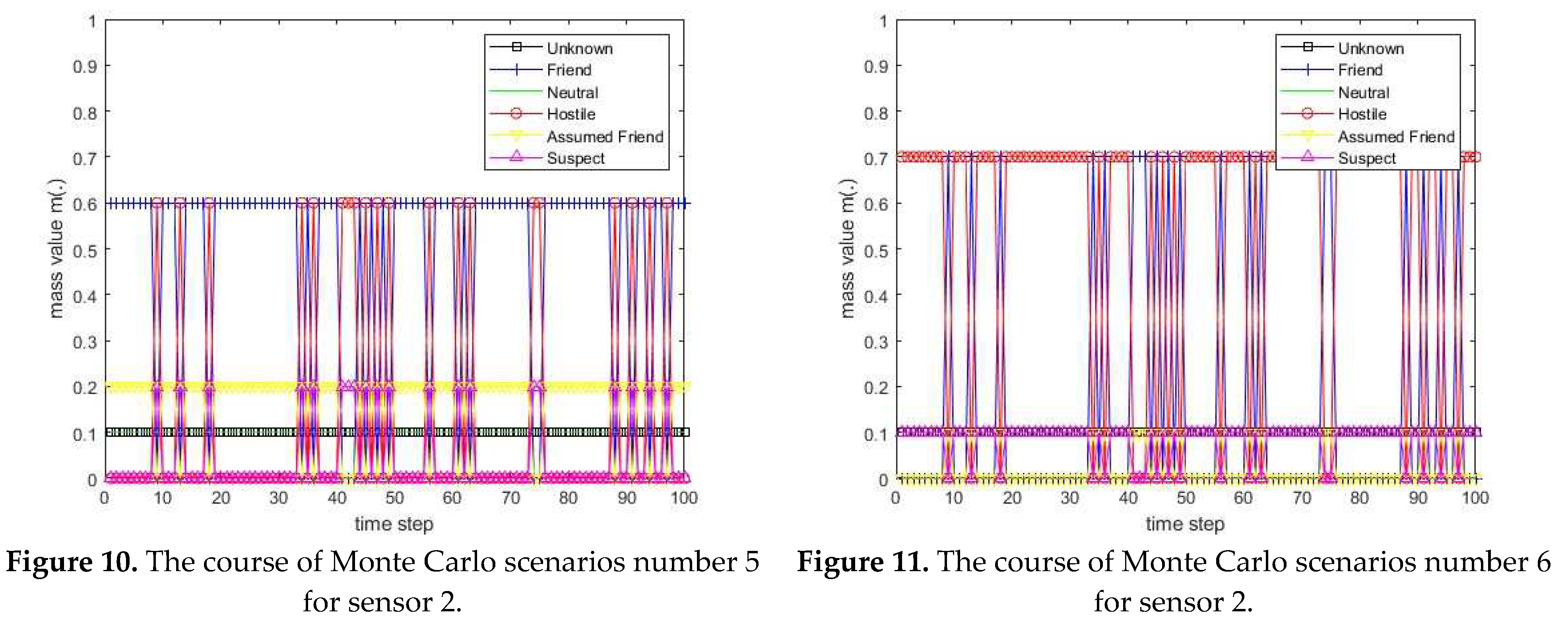
The Monte Carlo method of generating the scenario for the sensor 2 is also used in this paper. Moments in which incorrect identifications occurred are generate by the pseudorandom integer number generator from the range [0, 100]. Examples of scenarios are shown in Figures 10 and 11.
6.2. Calculation results for deterministic scenarios
Dempster’s rule
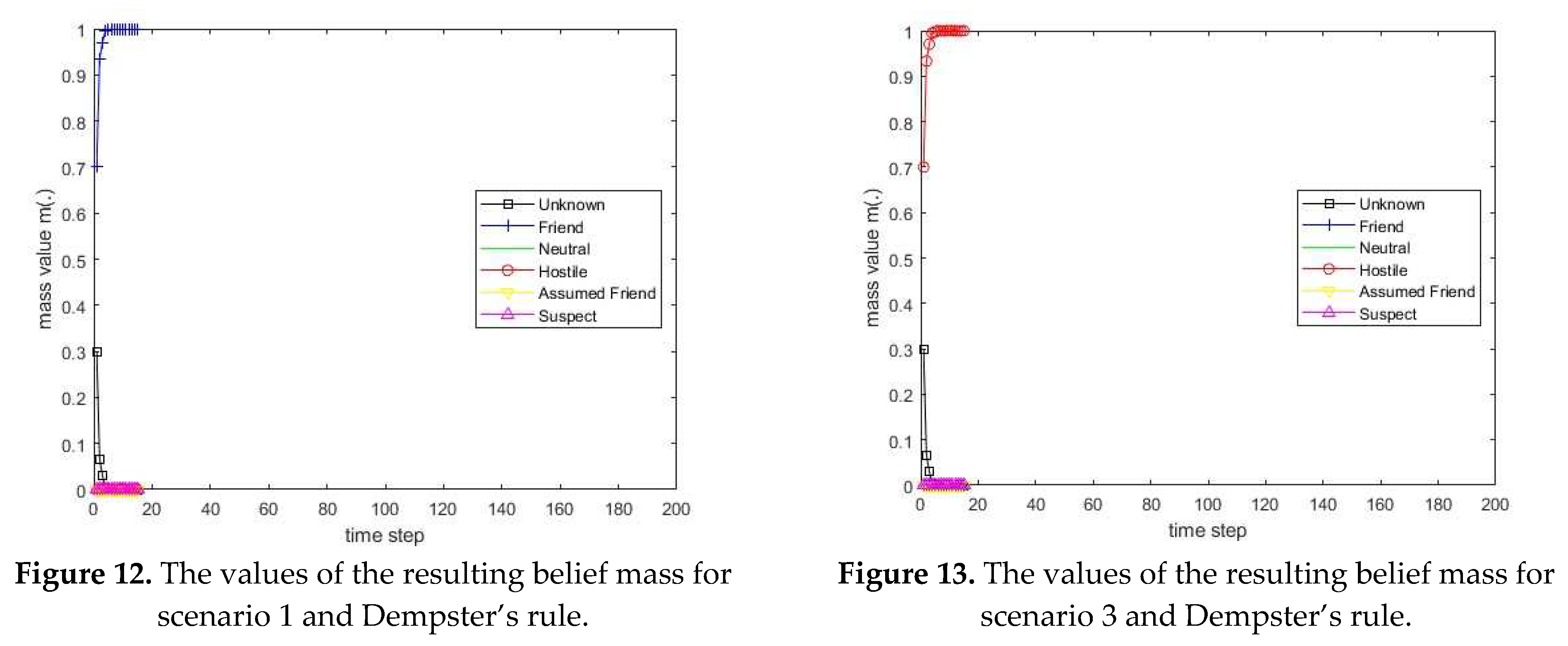
Dempster’s rule is not resistant to a situation when the degree of conflict kFi = 1. This means the total conflict between the mass vector sent by the sensor and the mass vector of the information fusion center, which occurs when each non-zero belief mass value sent by the sensor corresponds to zero belief mass value of the vector determined by the information fusion center and vice versa.
The simulation results of the identification information fusion using Dempster’s rule have been presented for the deterministic scenarios 1 and 3 in Figures 12 and 13.
The PCR1 rule
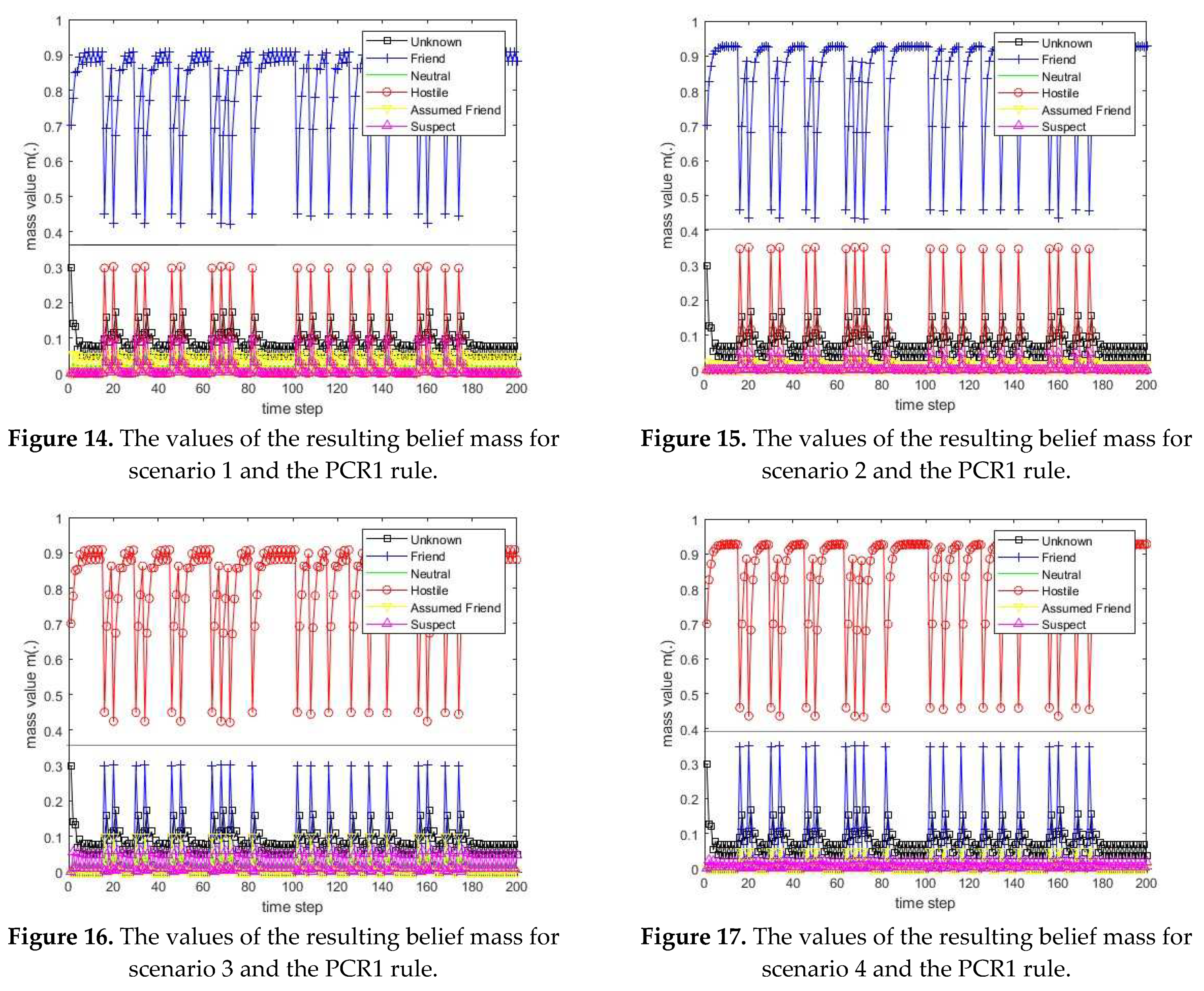
The simulation results of the identification information fusion using the PCR1 rule for the deterministic scenarios 1, 2, 3 and 4 are presented in Figures 14–17.
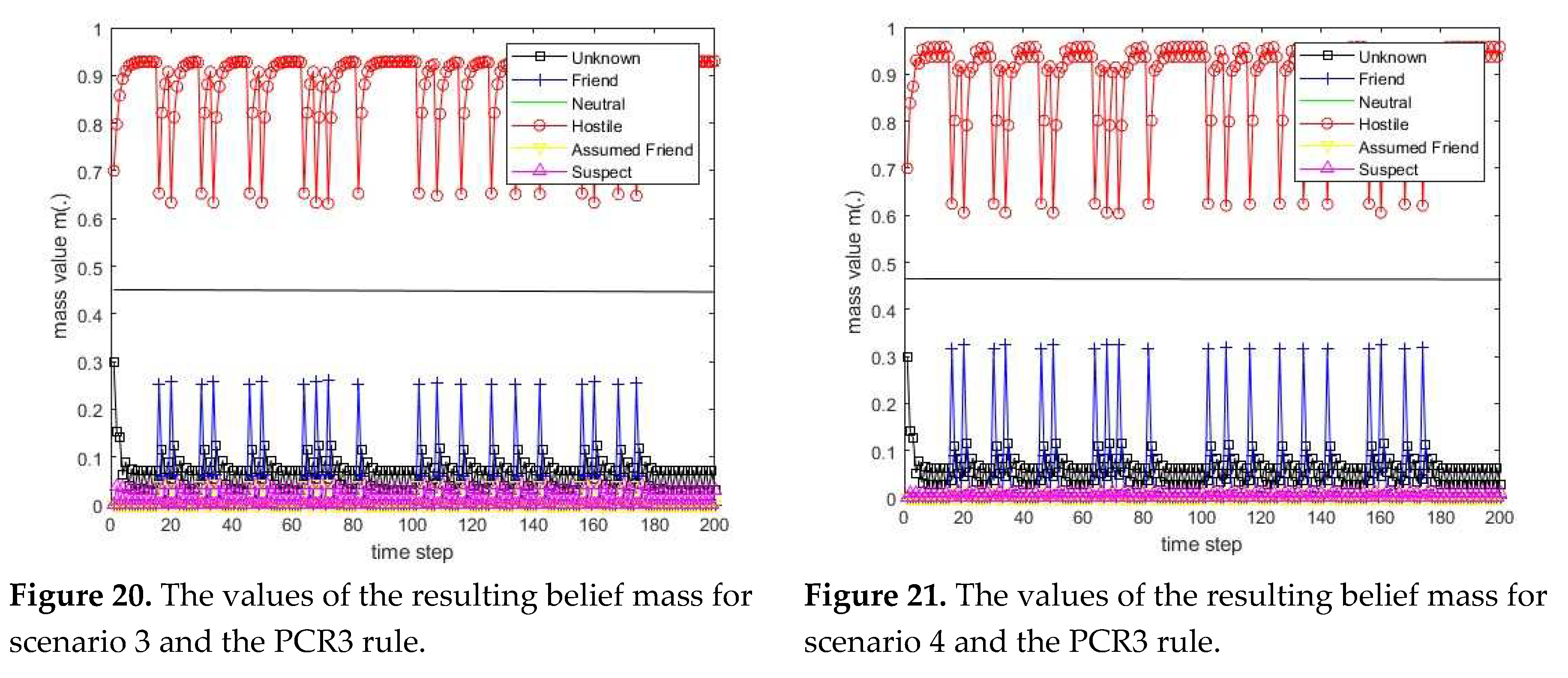
The PCR3 rule
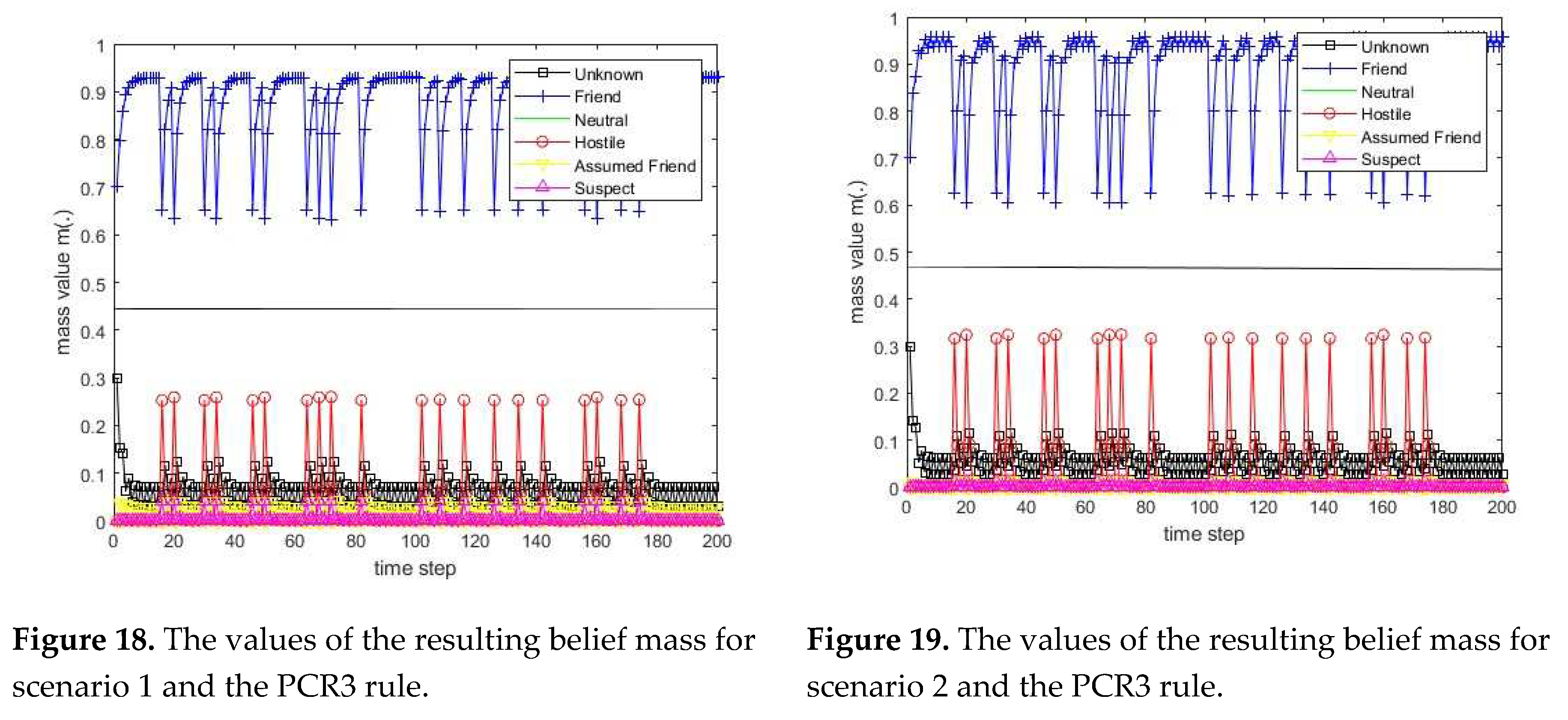
The simulation results of the identification information fusion using the PCR3 rule for the deterministic scenarios 1, 2, 3 and 4 are presented in Figures 18–21.
The PCR4 rule
The simulation results of the identification information fusion using the PCR4 rule for the deterministic scenarios 1, 2, 3 and 4 are presented in Figures 22–25.
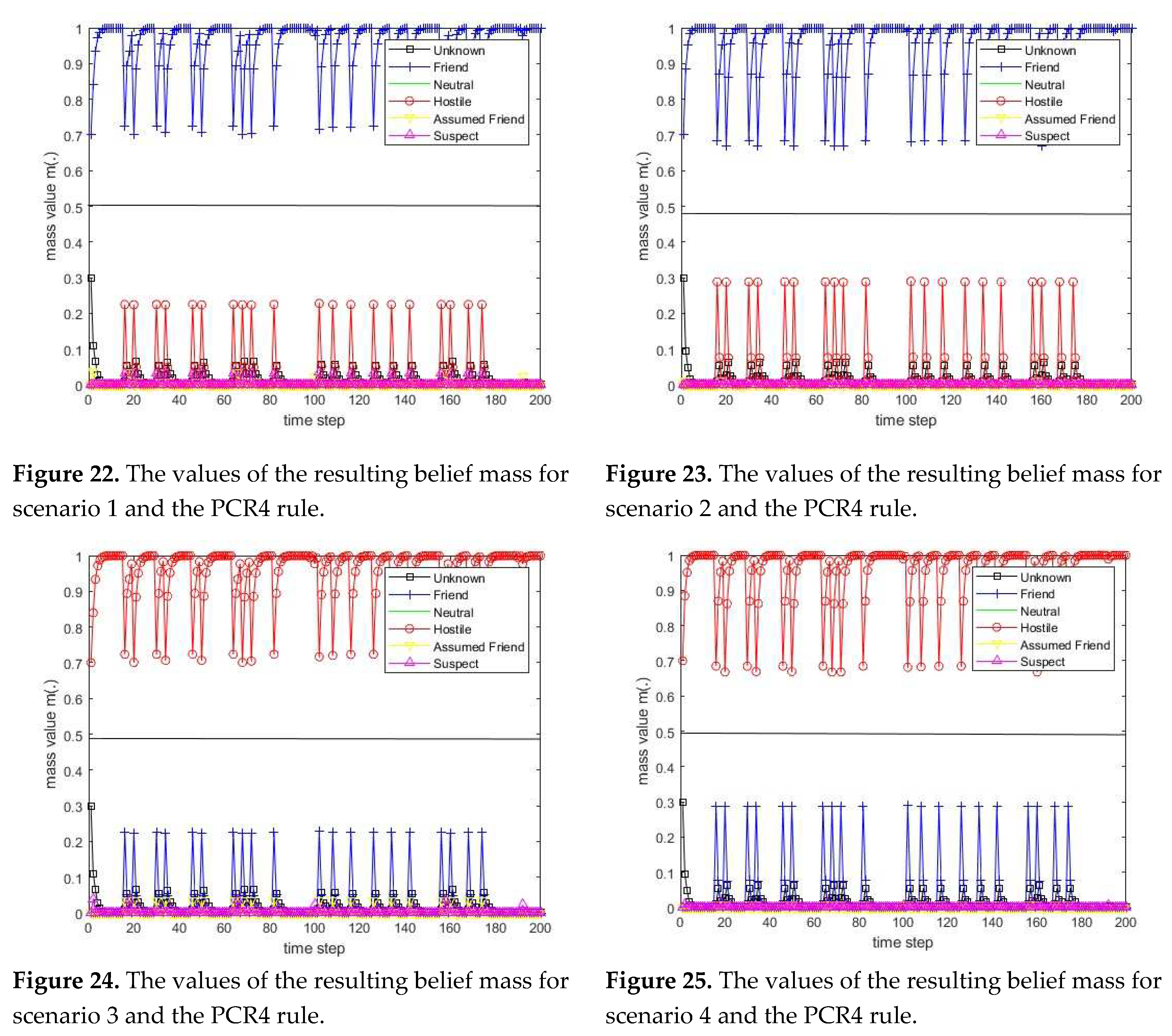
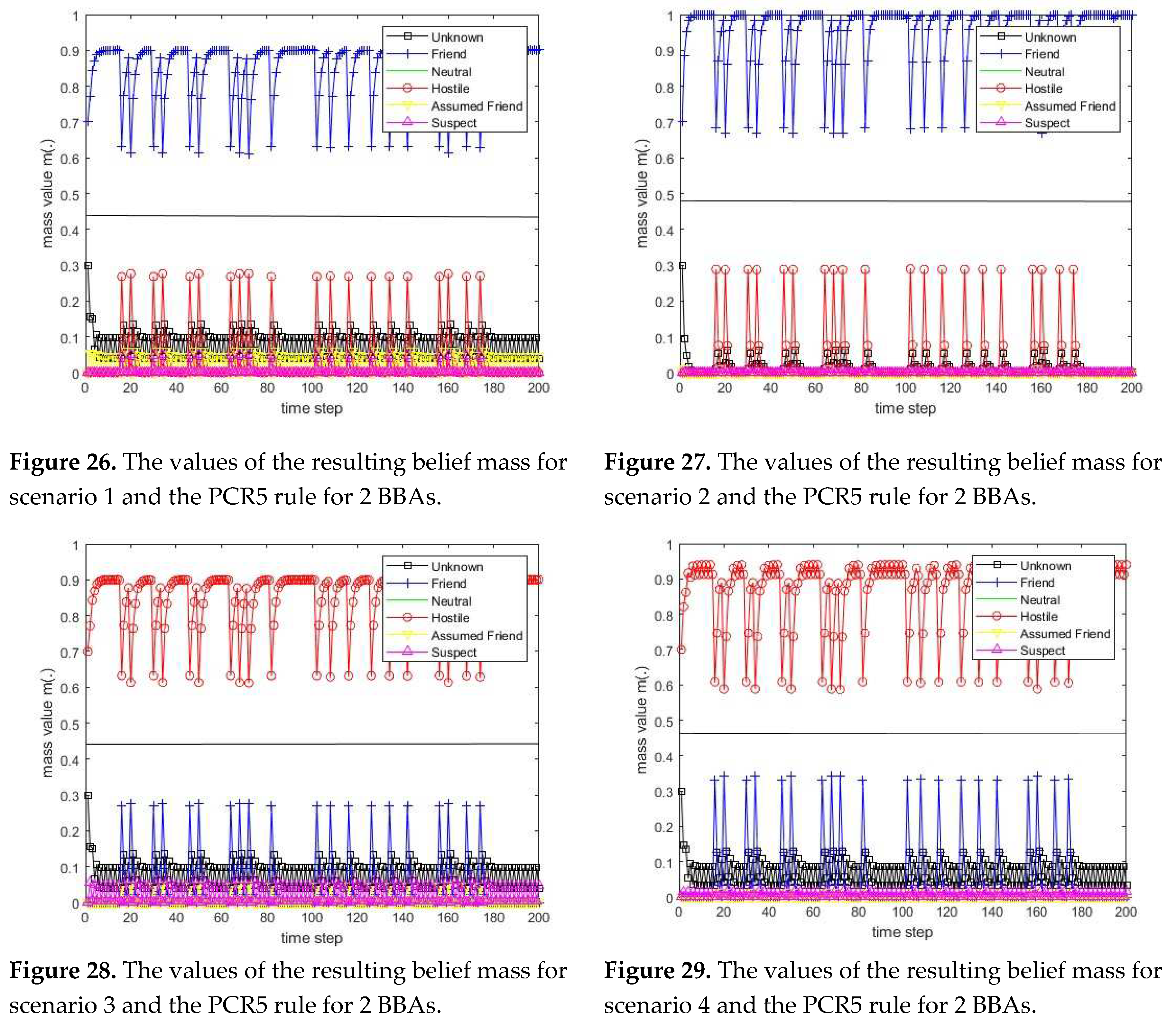
The PCR5 rule for 2 BBAs
The simulation results of the identification information fusion using the PCR5 rule for 2 BBAs for the deterministic scenarios 1, 2, 3 and 4 are presented in Figures 26–29.
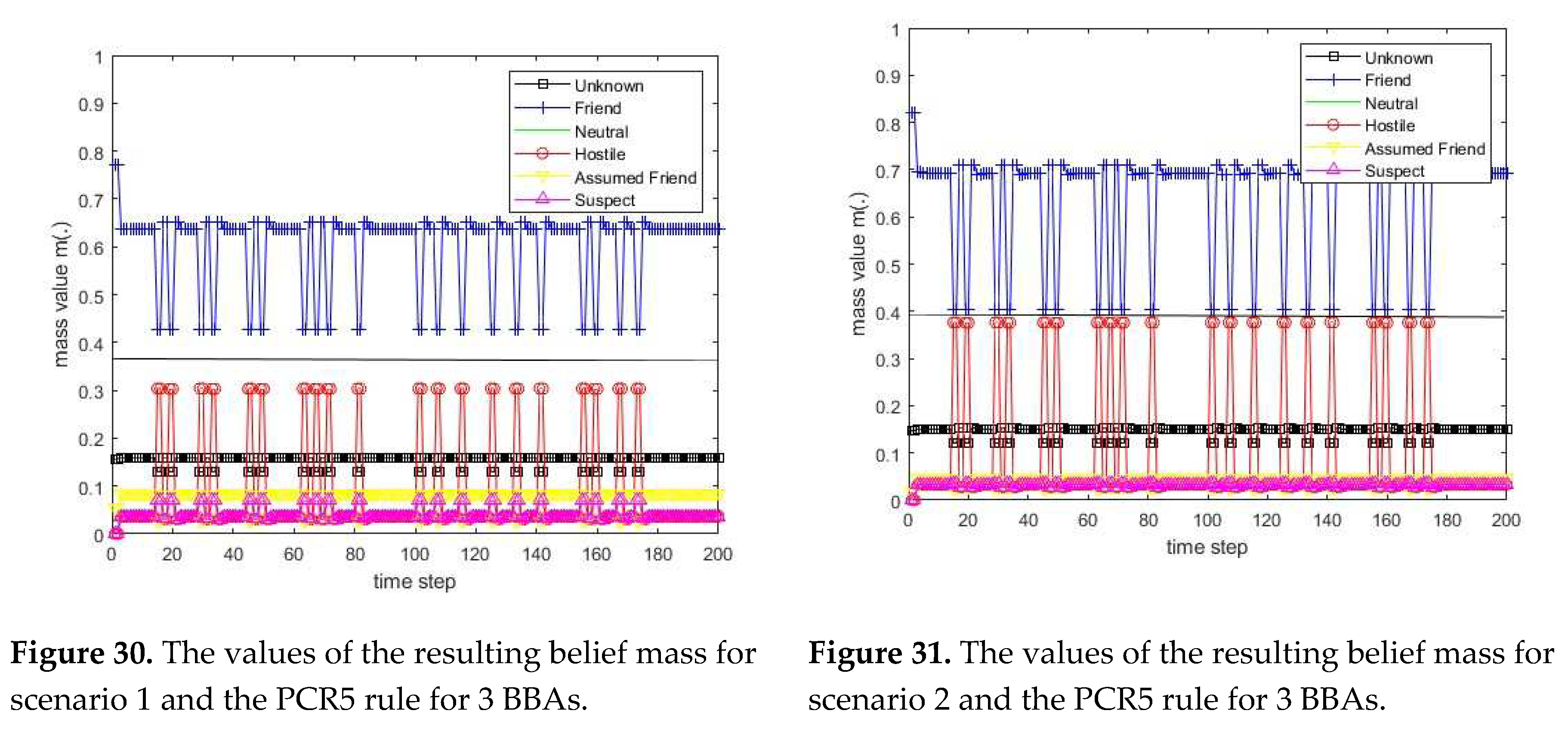
The PCR5 rule for 3 BBAs
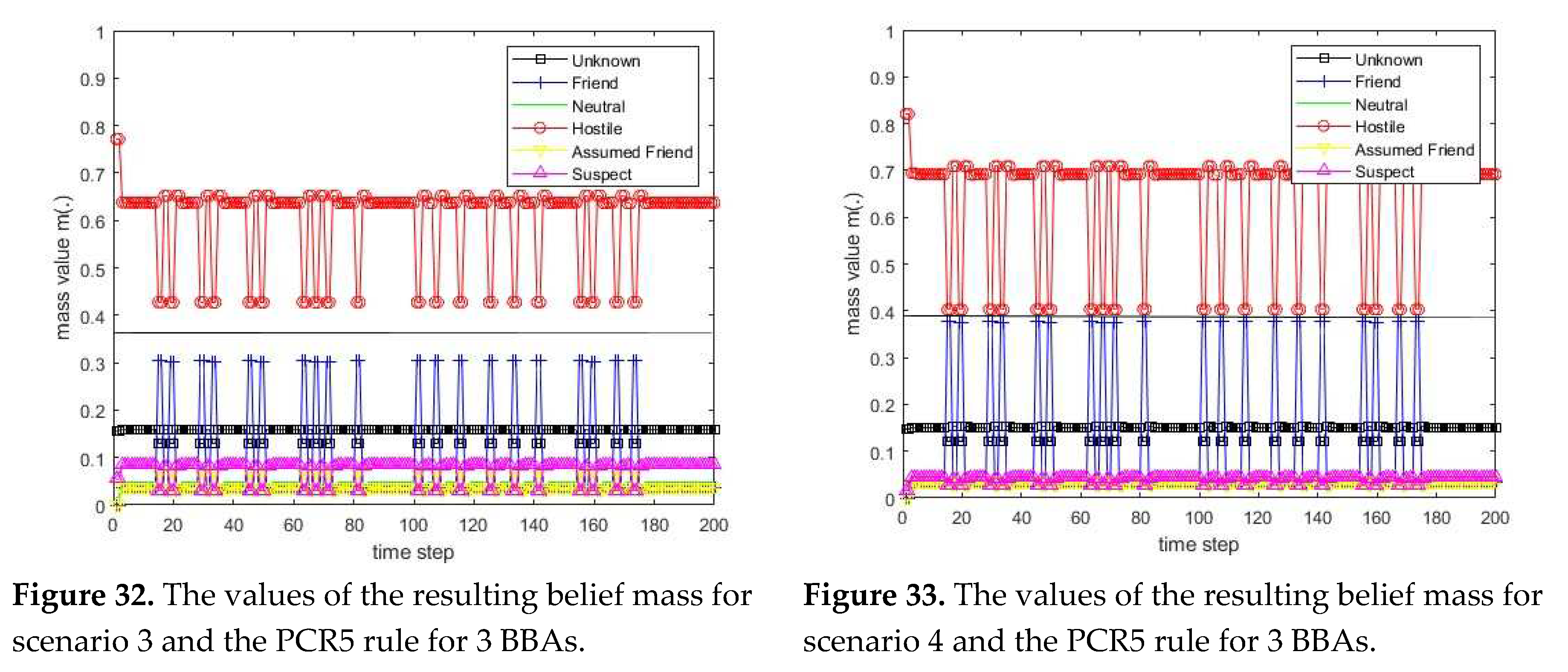
The simulation results of the identification information fusion using the PCR5 rule for 3 BBAs for the deterministic scenarios 1, 2, 3 and 4 are presented in Figures 30–33.
The PCR6 rule for 3 BBAs
The simulation results of the identification information fusion using the PCR6 rule for 3 BBAs for the deterministic scenarios 1, 2, 3 and 4 are presented in Figures 34–37.
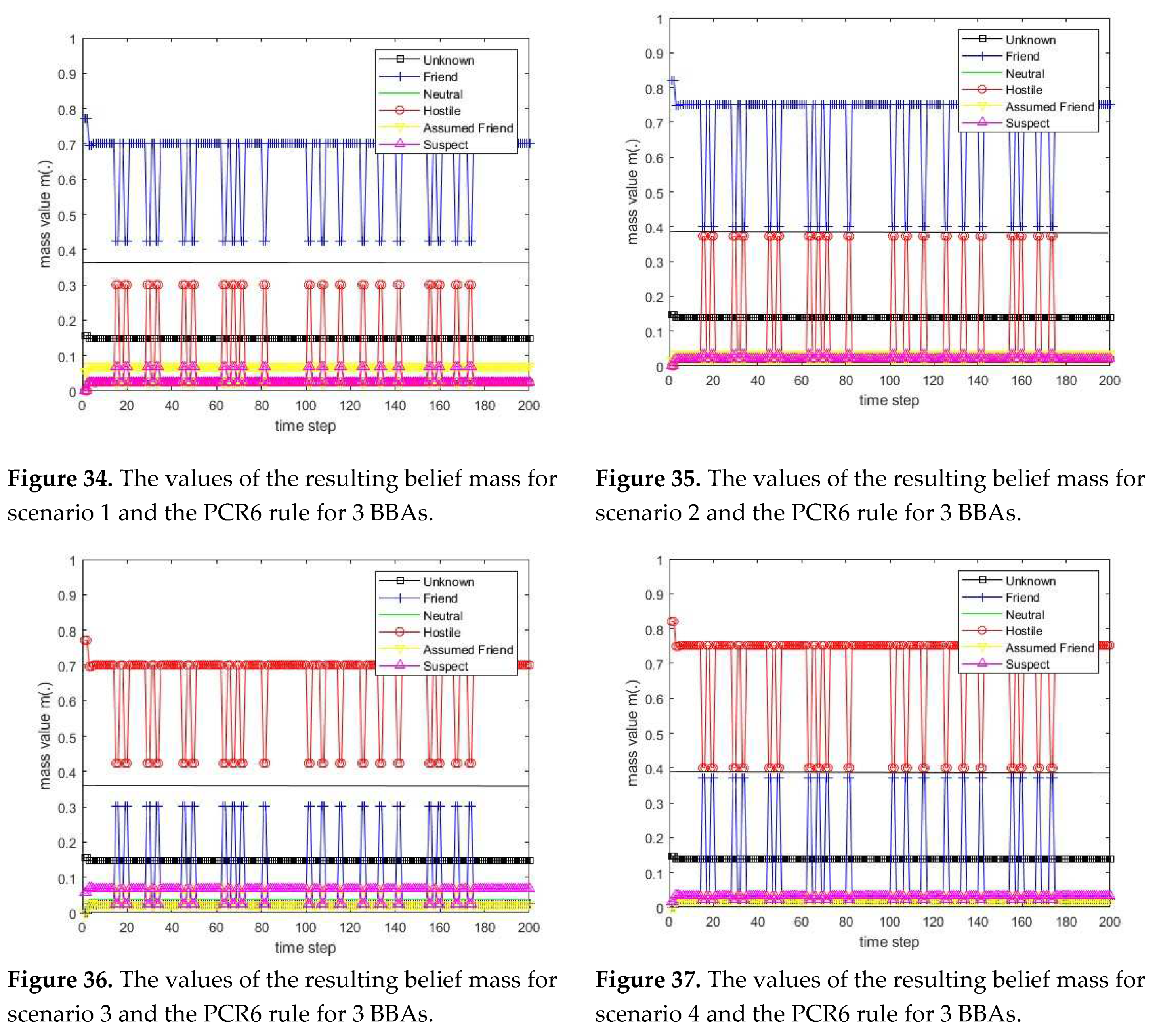
The presented results (Figures 12–37) allow us to conclude that the applied methods of managing conflicts in the information fusion allow to draw correct conclusions about the real identification of the recognized object.
The application of the decision threshold for the belief mass at the level mα=0,37 for the PCR1 rule and mα =0.45 for the PCR3, PCR4 and PCR5 rules for scenarios 1 and 3 allows us to properly evaluate the identification of the recognized object: for scenario 1 – FRIEND and for scenario 3 – HOSTILE. For scenarios 2 and 4, the optimal thresholds are mα =0.4 for the PCR1 rule and mα =0.45 for the PCR3, PCR4 and PCR5 rules respectively. When assessing the interval between the minimum resultant mass for correct identification and the maximum resultant mass for misidentification, the worst results are reached by the PCR1 rule and the rules of PCR3, PCR4 and PCR5 behave similarly and are better than the rule PCR1.
The research carried out for deterministic scenarios shows that the PCR5 rule for 3 BBAs and the PCR6 rule for 3 BBAs behave very similarly. They restores the correct identification after the occurrence of temporary misidentification much faster than the rules PCR1 – PCR5 for 2 BBAs
6.3. Calculation results for Monte Carlo scenarios
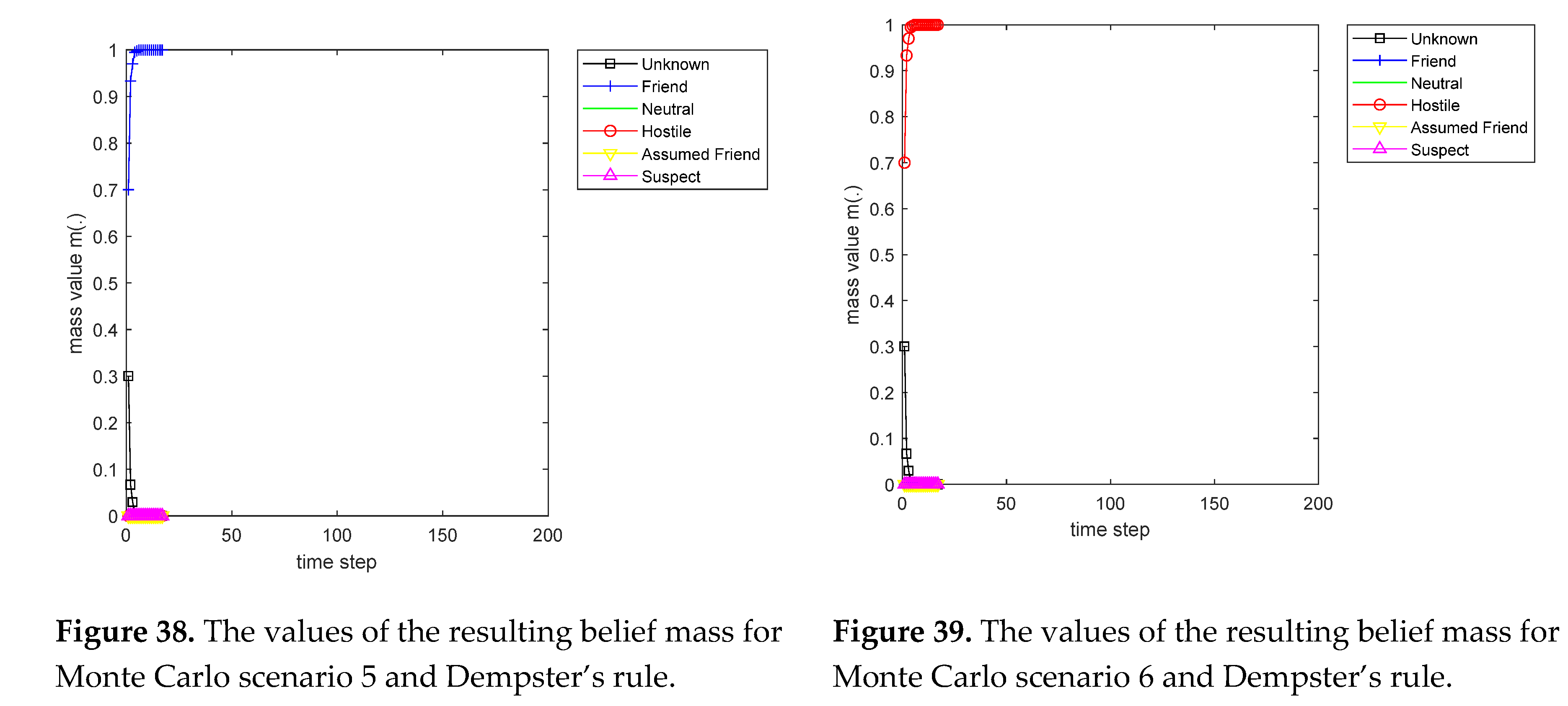
Dempster’s rule
In the Monte Carlo scenario, Dempster’s rule behaves similarly to a deterministic scenario. It is not resistant to a situation when the degree of conflict kFi = 1. This means the total conflict between the mass vector sent by the sensor and the mass vector of the information fusion center which occurs when each non-zero belief mass value sent by the sensor corresponds to zero belief mass value of the vector determined by the information fusion center and vice versa.
The simulation results of the identification information fusion using Dempster’s rule are presented for the Monte Carlo scenarios 5 and 6 in Figures 38 and 39.
rule have been presented for the deterministic scenarios 1 and 3 in Figures 12 and 13.
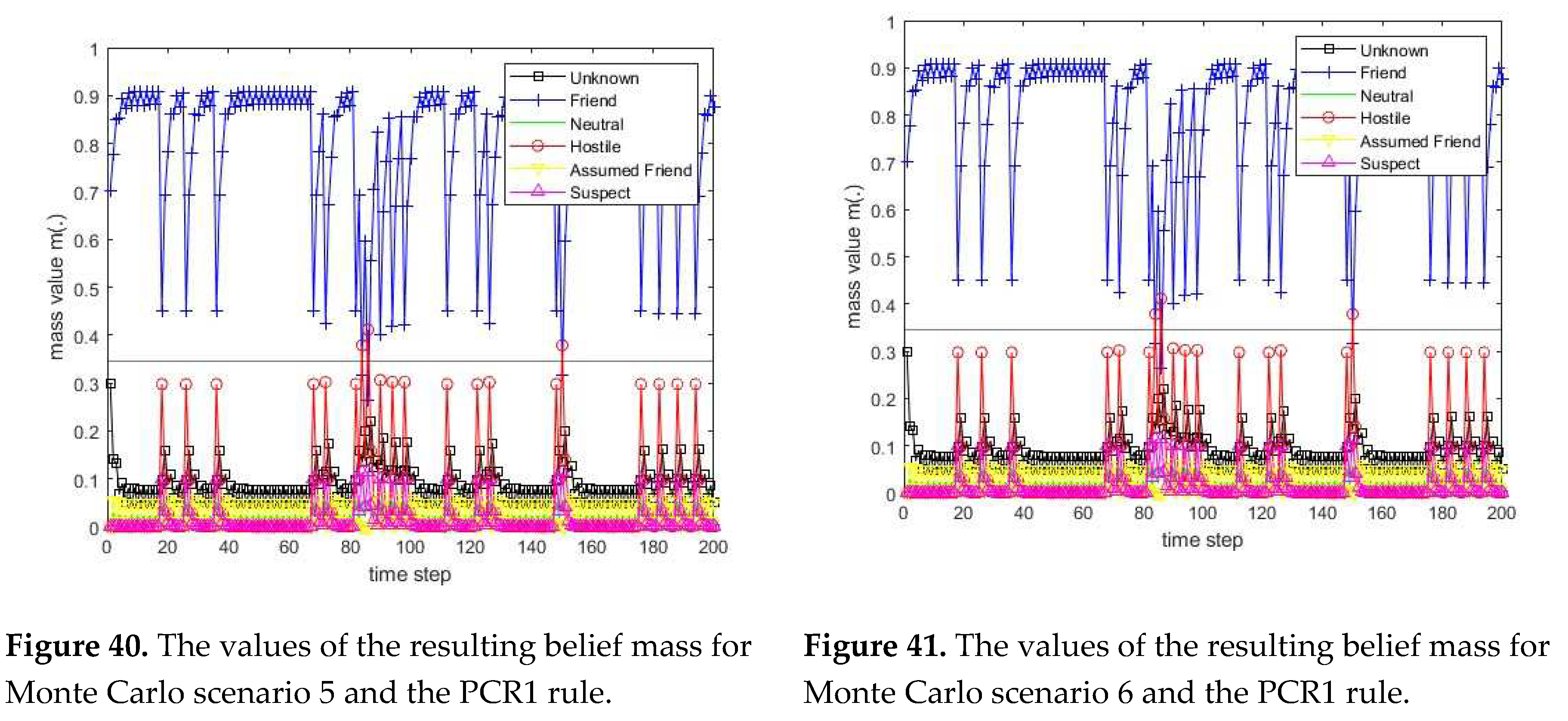
The PCR1 rule
The simulation results of the identification information fusion using the PCR1 rule for the Monte Carlo scenarios 5 and 6 are presented in Figures 40 and 41.
The PCR3 rule
The simulation results of the identification information fusion using the PCR3 rule for the Monte Carlo scenarios 5 and 6 are presented in Figures 42 and 43.
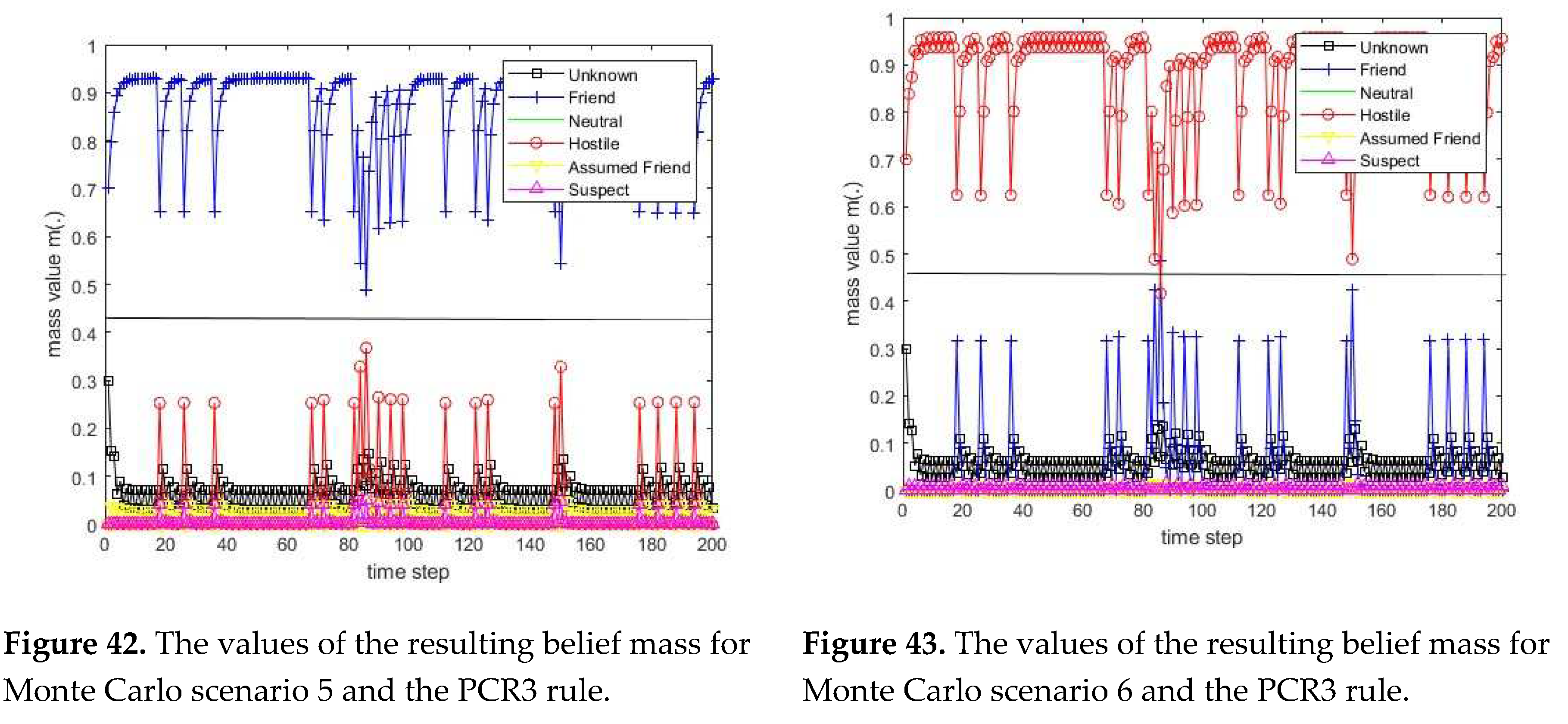
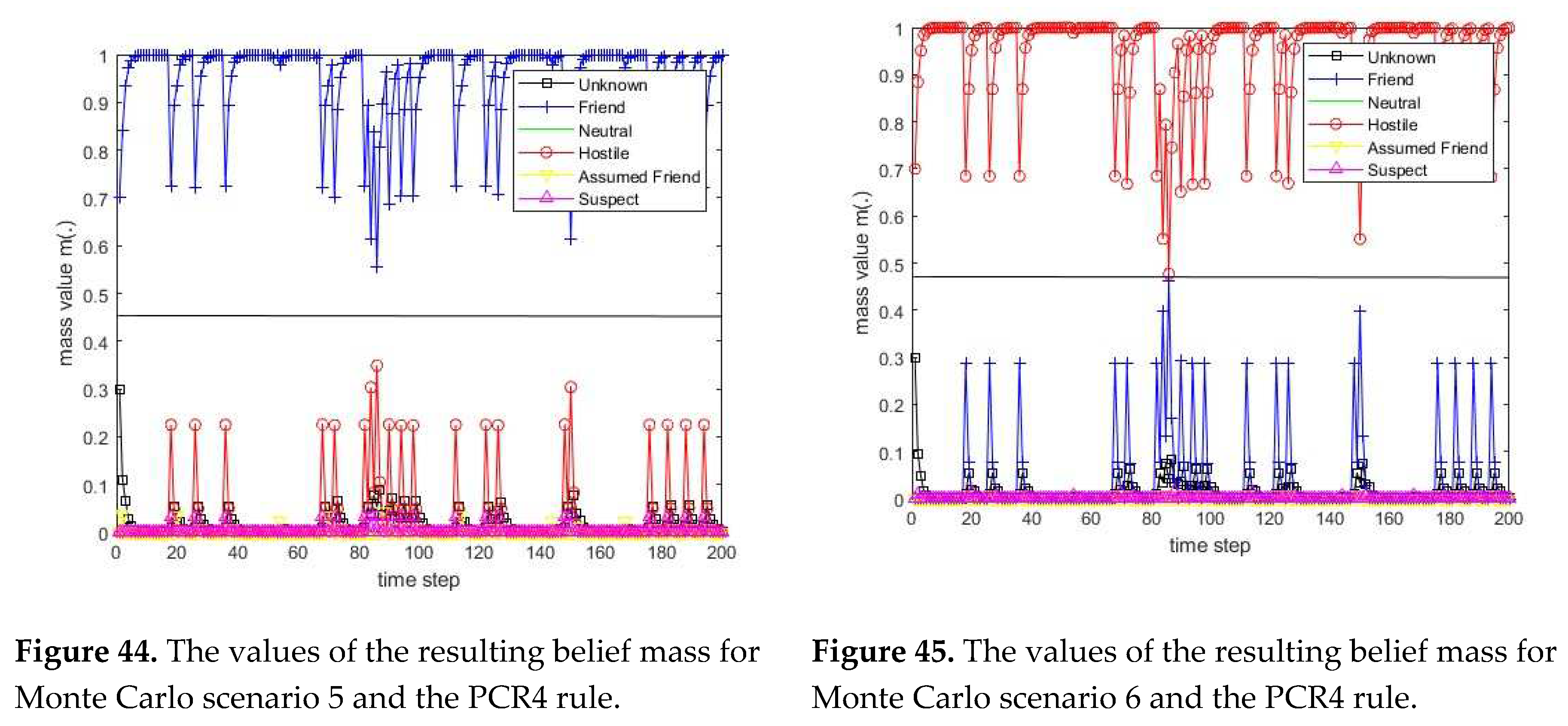
The PCR4 rule
The simulation results of the identification information fusion using the PCR4 rule for the Monte Carlo scenarios 5 and 6 are presented in Figures 44 and 45.
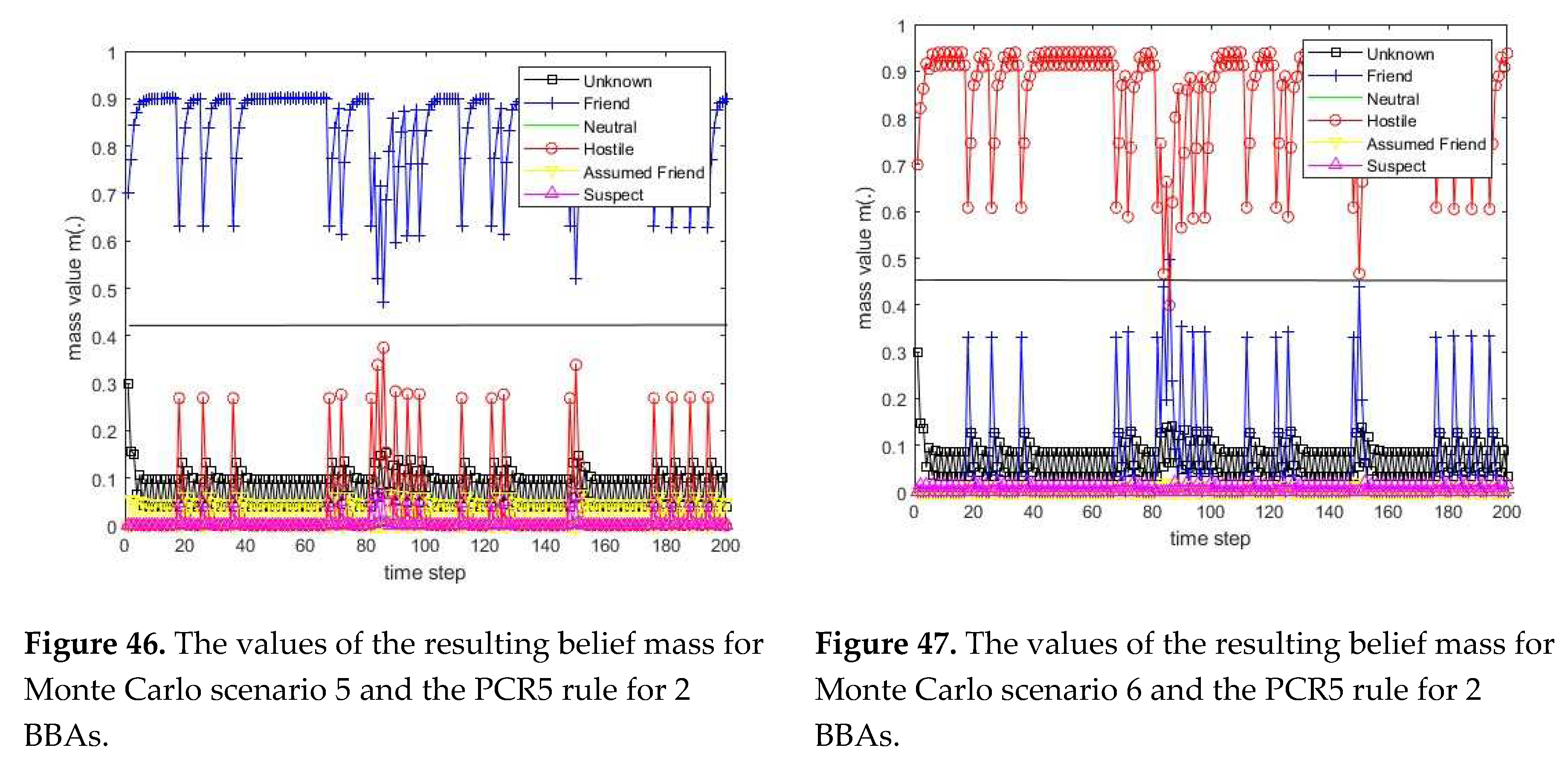
The PCR5 rule for 2 BBAs
The simulation results of the identification information fusion using the PCR5 rule for 2 BBAs for the Monte Carlo scenarios 5 and 6 are presented in Figures 46 and 47.
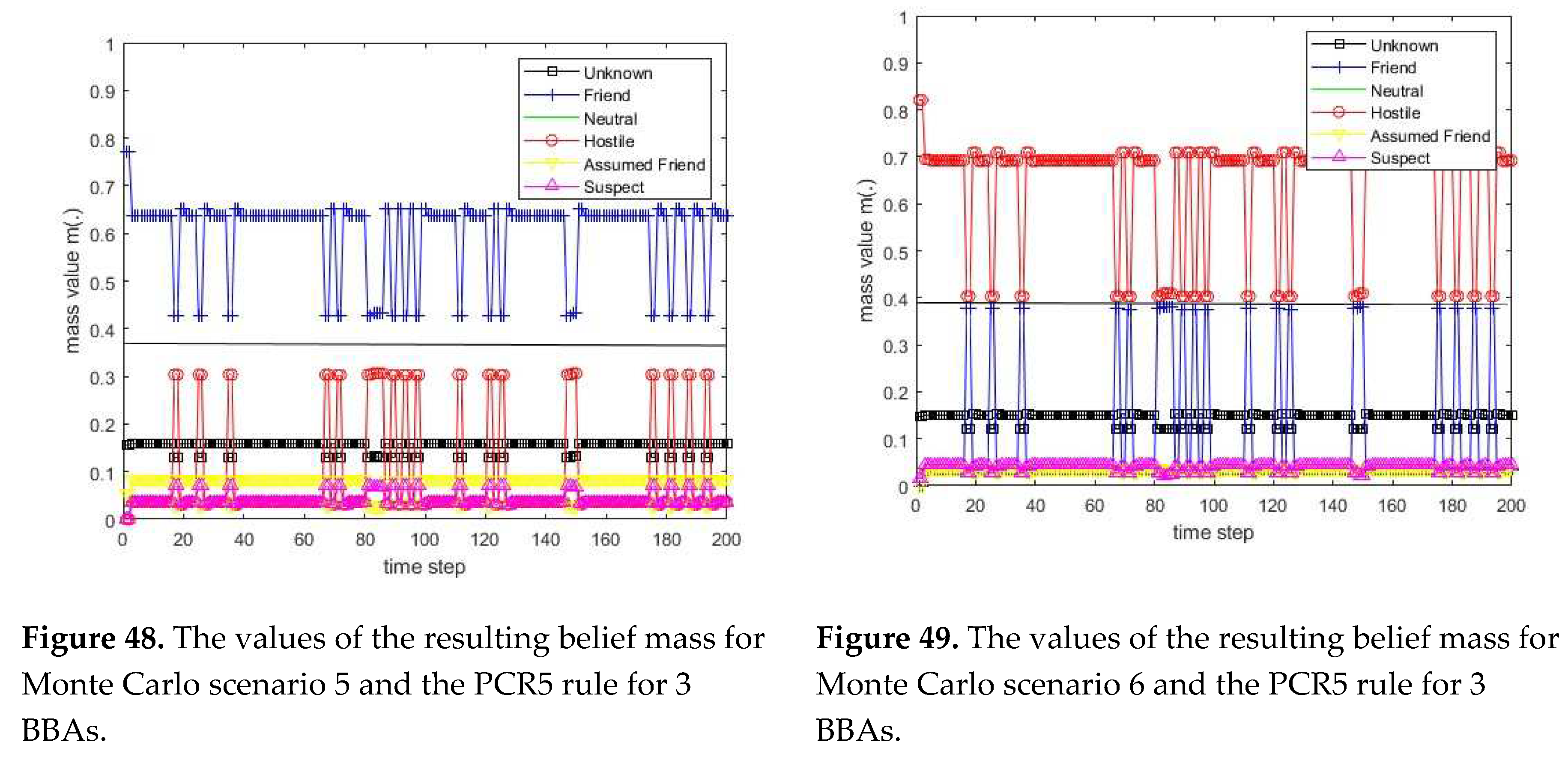
The PCR5 rule for 3 BBAs
The simulation results of the identification information fusion using the PCR5 rule for 3 BBAs for the Monte Carlo scenarios 5 and 6 are presented in Figures 48 and 49.
The PCR6 rule for 3 BBAs
The simulation results of the identification information fusion using the PCR6 rule for 3 BBAs for the Monte Carlo scenarios 5 and 6 are presented in Figures 50 and 51.
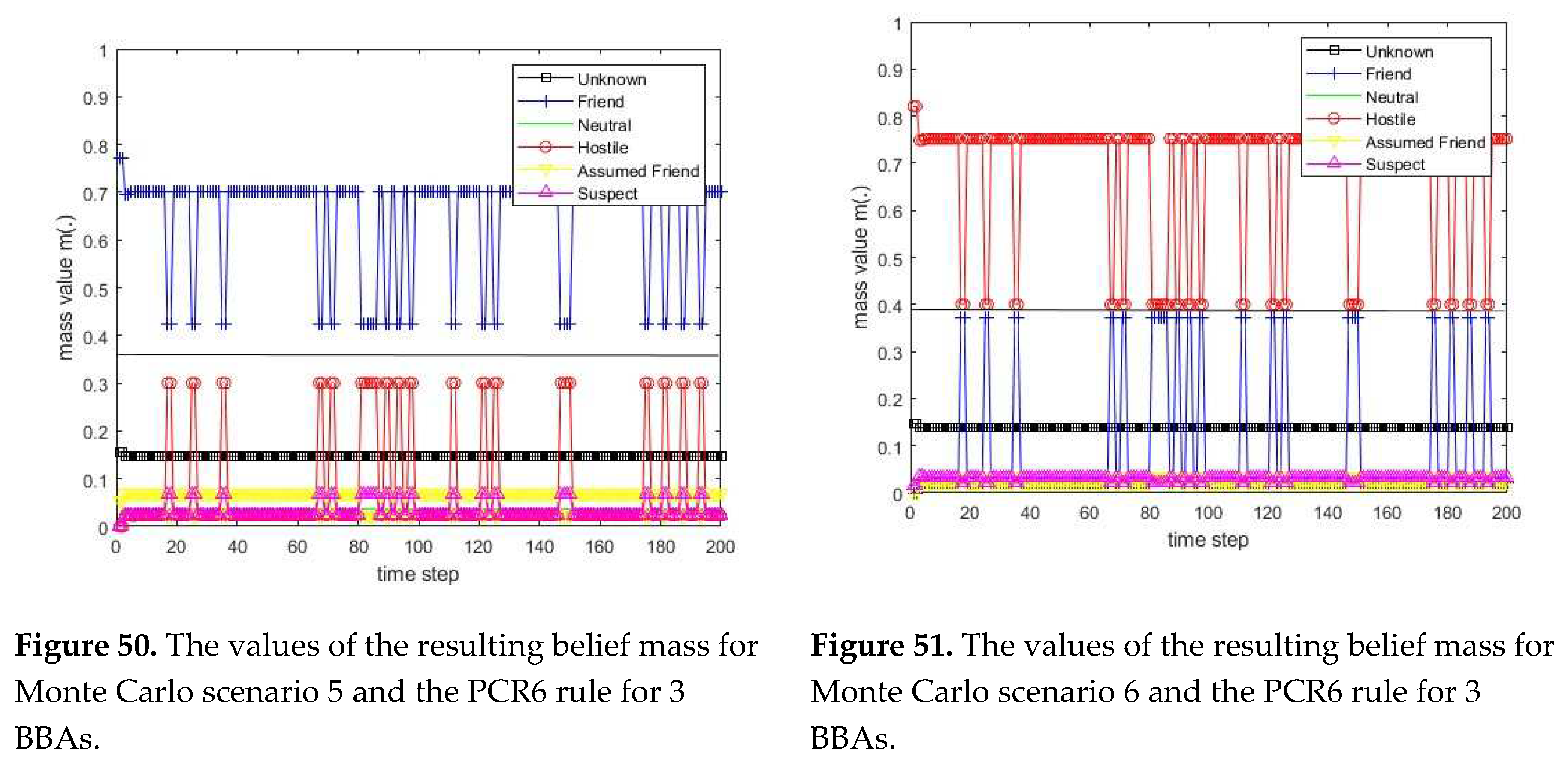
The presented results show that due to the high intensity of sending reports with incorrect identifications in the middle part of the scenarios, the information fusion rules (apart from the PCR4,PCR 5 and PCR6 rules) determine the maximum resulting mass for incorrect identification. The PCR5 for 3 BBAs and PCR6 for 3 BBAs rules are the fastest to restore the correct identification after receiving several incorrect reports.
7. Numerical experiments of fusion of identification information from ESM sensors and radars
7.1. Numerical experiments scenarios
We assume that we will combine attribute information from 2 sensors: a combined primary and secondary surveillance radar and an ESM sensor. These sensors work asynchronously. Upon receipt of the sensor's declaration in the form of a vector of masses, we fuse this vector with the vector of the actual values of the declaration masses for the fuser’s frame of discernment. The frequency of transmission of sensor declarations depends on the rules of the data exchange network and on the technical characteristics of the sensors. Various combination methods are presented in [13, 14]. In this paper, two of the methods of proportional redistribution conflict (PRC5 and PCR6 [11,12]) has been used. The numerical model of combined primary and secondary surveillance radars was taken from [15,16].
Numerical experiments have been performed for the following data:
- for combined primary and secondary surveillance radars sensor:
- =, = 100 [km], =0.7, = 2 [m2], = 0.962
- and the following table of masses (compare Table 1):
The flight path of air object was 30 km away from the sensor (in the horizontal plane), flight altitude was 1 km and radar cross-section was 1 sq. m.
- for EMS sensor:
the following assumptions concerning the parameters of the scenario for ESM sensor are made in this paper:
- 1)
- the real value of identification is constant in each scenario and is equal to FRIEND (F) – in the first scenario and HOSTILE (H) - in the second scenario;
- 2)
- the above declarations are transmitted by sensor number 1 with the real identification mass equal to 0,7 and the mass of complementary identification (UNKNOWN) equal to 0,3;
- 3)
In the Table 7, Table 8, Table 9, Table 10, Table 11 and Table 12 the mass values for all possible declarations for six scenarios for ESM sensor are presented.
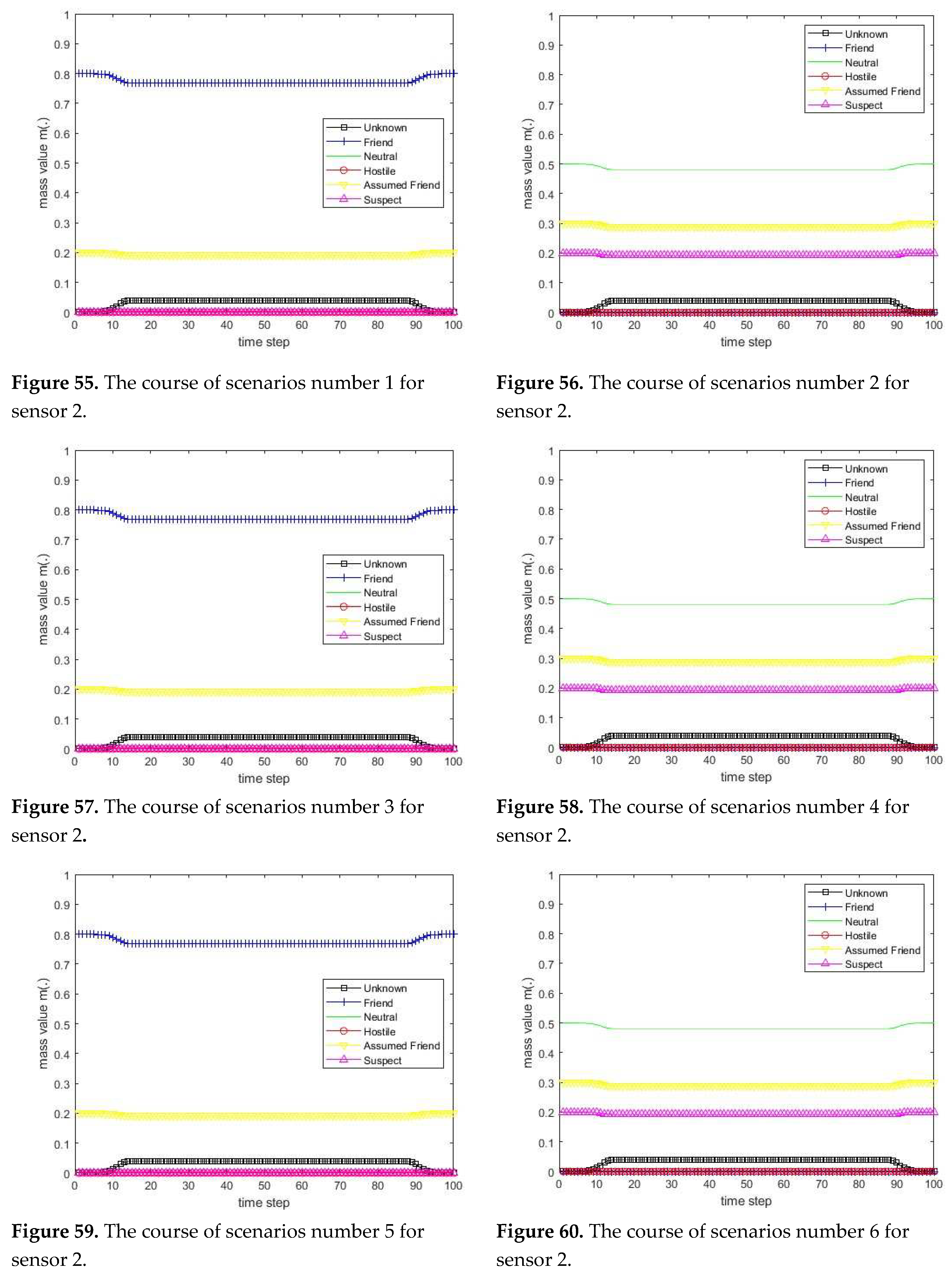
Scenarios 1-6 for the sensor 1 have been presented in Figures 52,53 and 54. All deterministic scenarios for the sensor 2 have been presented in Figures 55–60.
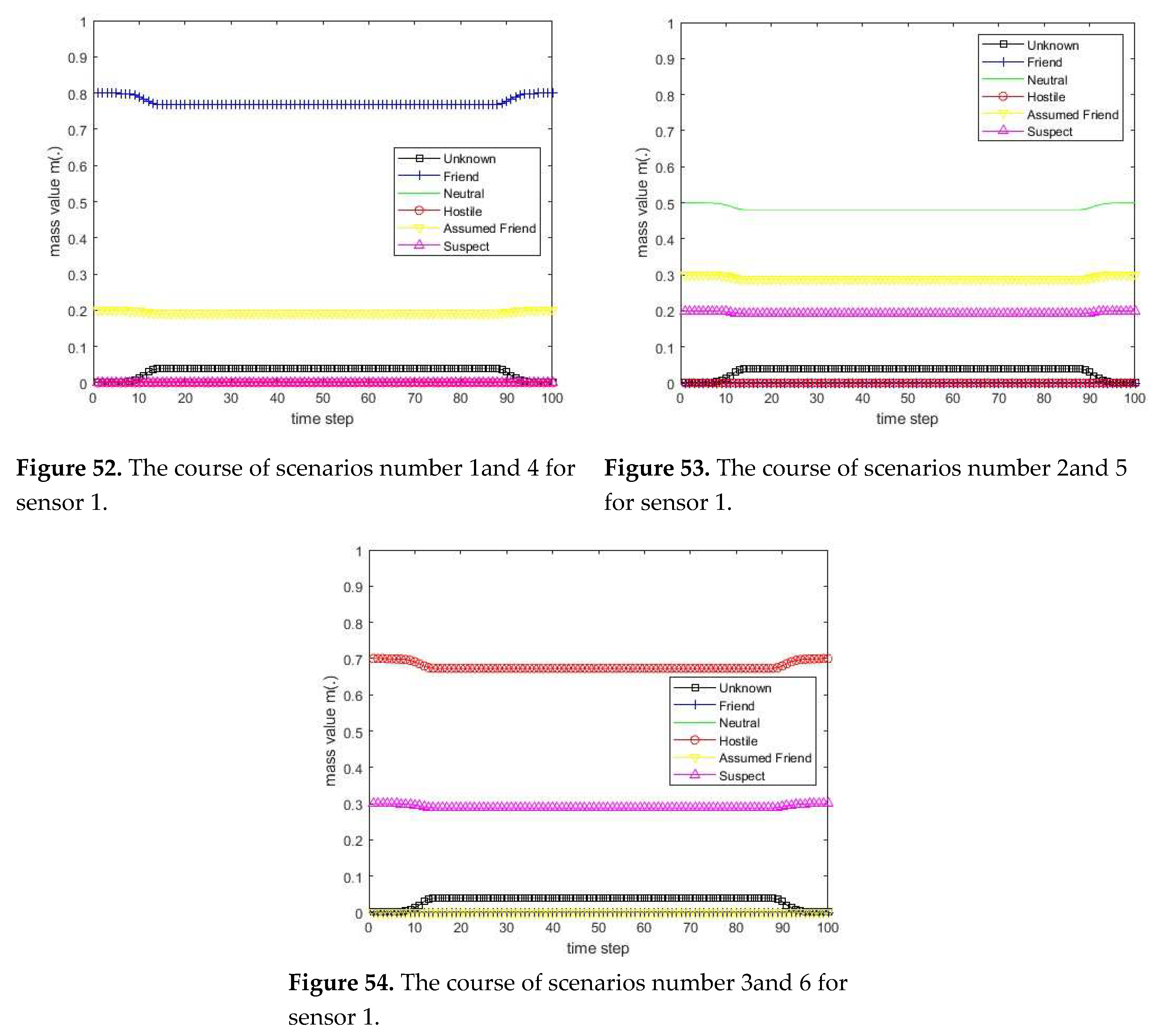
Scenarios 1-3 assume relatively small changes in the mass of all declarations. Scenarios 1-3 assume significant changes in the credibility mass of all declarations (small errors). Scenarios 4-6 assume significant changes in the mass of all declarations (large errors).
7.2. Calculation results for four proportional conflict redistribution rules
The PCR5 rule for 2 BBAs
The simulation results of the identification information fusion using the PCR5 rule for 2 BBAs for the deterministic scenarios 1-6 are presented in Figures 61–66.
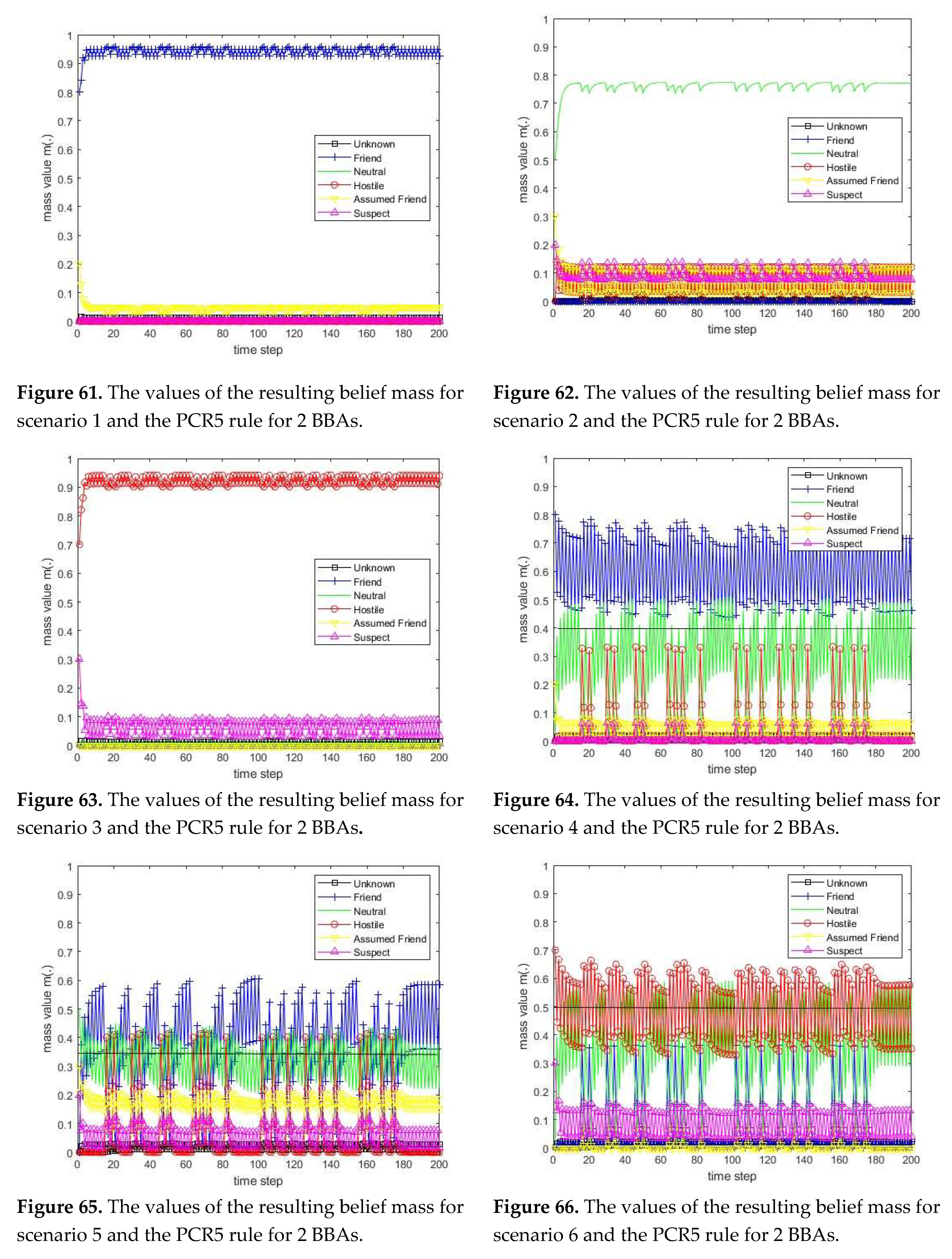
For the PCR5 rule for 2 BBAs, the application of the decision thresholds at the belief mass level mα=0,43 for scenario 4, mα=0.35 for scenario 5 and mα=0. 5 for scenario 6 allows us to properly evaluate the identification of the recognized object for most time moments.
The PCR5 rule for 3 BBAs
The simulation results of the identification information fusion using the PCR5 rule for 3 BBAs for the deterministic scenarios 1-6 are presented in Figures 67–72.
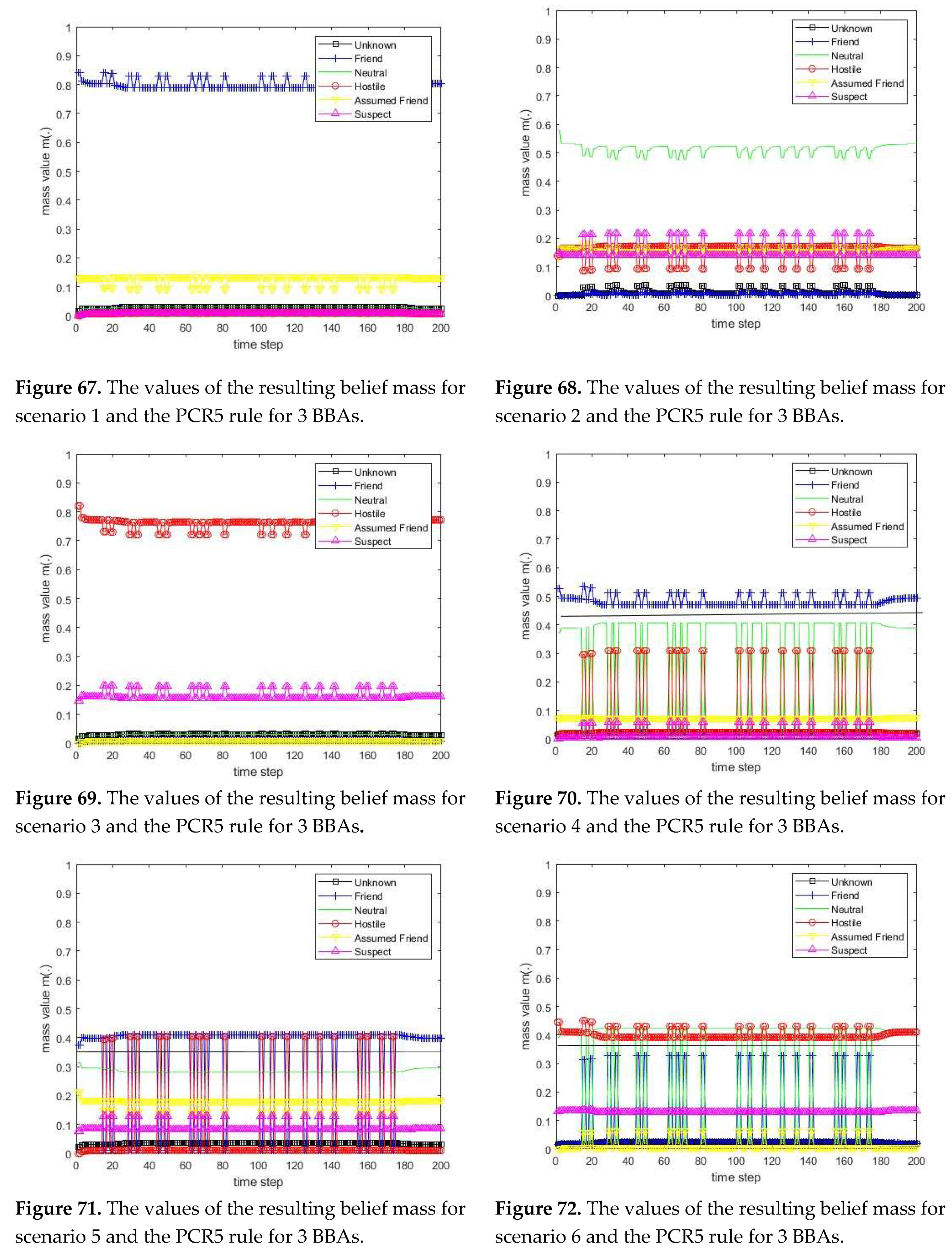
For the PCR5 rule for 3 BBAs, the application of the decision thresholds at the belief mass level mα=0,42 for scenario 4 allows us to properly evaluate the identification of the recognized object.
For the PCR5 rule for 3 BBAs, the application of the decision thresholds at the belief mass level mα=0.37 for scenarios 5 and 6 allows us to properly evaluate the identification of the recognized object for most time moments.
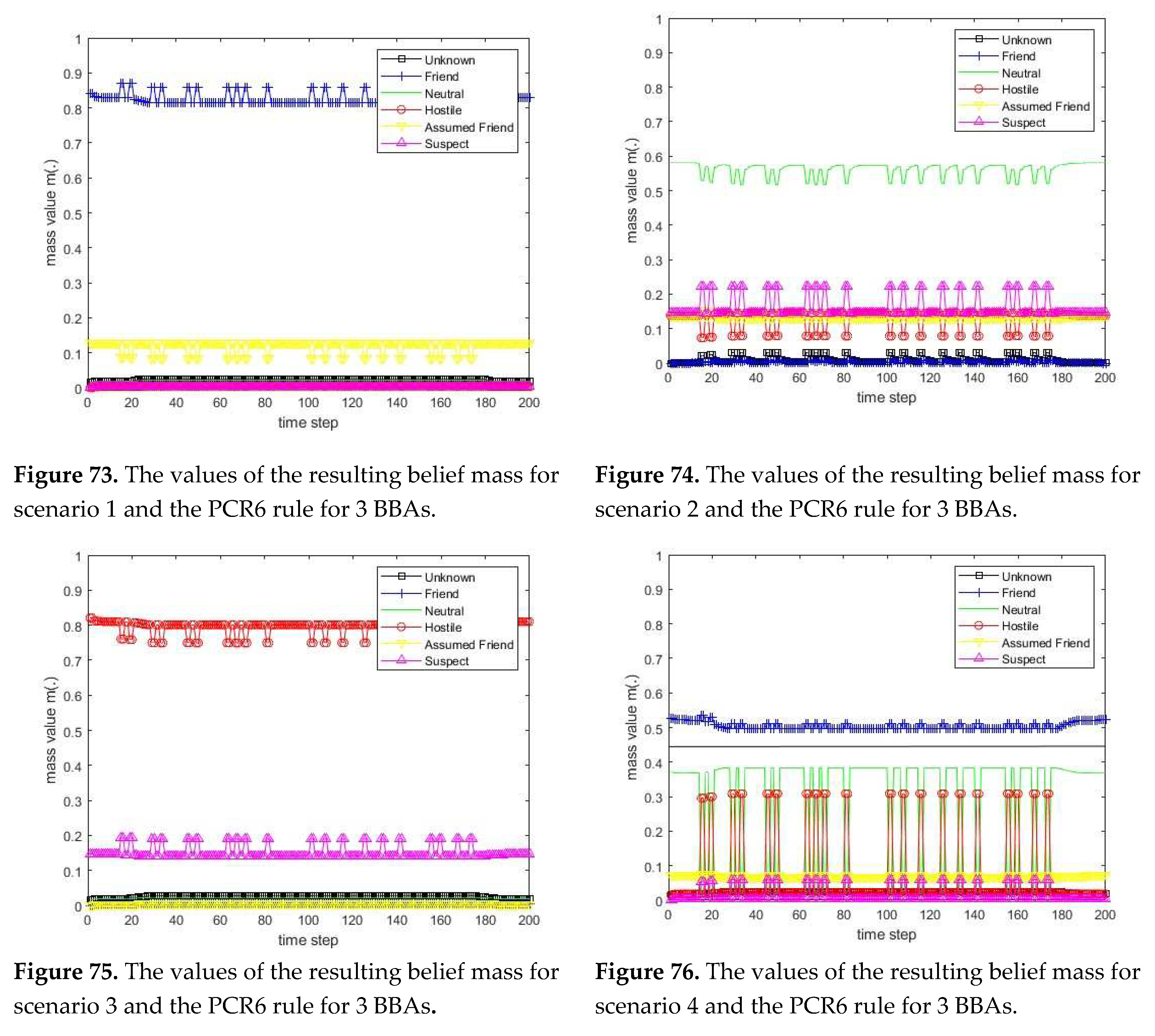
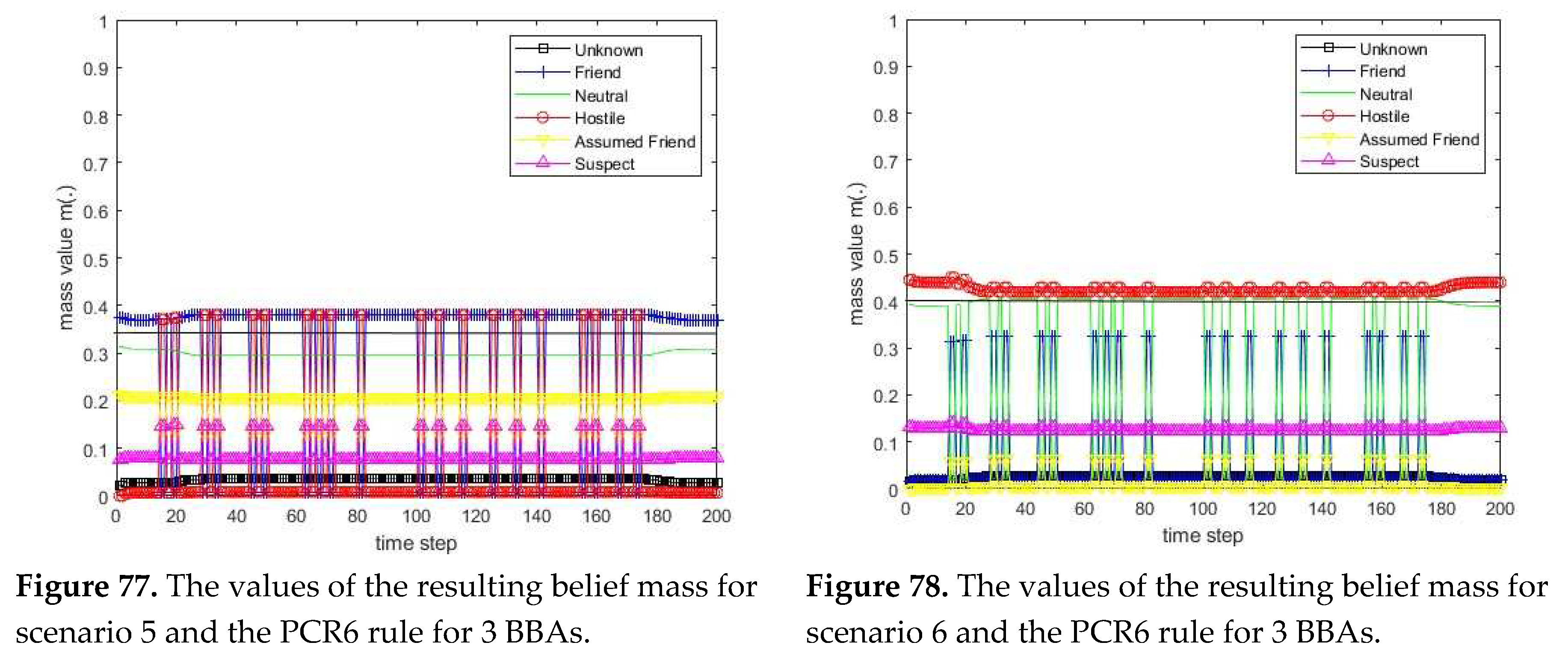
The PCR6 rule for 3 BBAs
The simulation results of the identification information fusion using the PCR6 rule for 3 BBAs for the deterministic scenarios 1-6 are presented in Figures 67–72.
For the PCR6 rule for 3 BBAs, the application of the decision thresholds at the belief mass level mα=0,45 for scenario 4 allows us to properly evaluate the identification of the recognized object.
For the PCR6 rule for 3 BBAs, the application of the decision thresholds at the belief mass level mα=0.37 for scenario 5 and mα=0.4 for scenario 6 allows us to properly evaluate the identification of the recognized object for most time moments.
Comparing Figures 64–66 with Figures 70–72 and Figures 76–78, one can conclude that the PCR5 for 3 BBAs and PCR6 for 3 BBAs rules provide more stable results of combined belief masses (smaller amplitude of changes). Due to the large dispersion of belief mass changes for scenarios 5 and 6, it is not possible to correctly evaluate the identification of the recognized object for all time moments.
The presented results (Figures 61–78) allow us to conclude that the applied methods of removing conflicts in the information fusion allow to draw correct conclusions about the real identification of the recognized object.
8. Conclusions
The proposed basic belief assignment model for ELINT-ESM sensors and radars can be used to build identification information fusion systems. Practical meaning have, first of all, models conformable to STANAG 1241.
Due to the assumption of conflicts between the ELINT-ESM sensor declarations in this work, Dezert-Smarandache theory is used to determine the basic belief assignment of declarations being the product of the process of fusion of identification information sent by these sensors. Supplementing standard reports on detected signals with random identification declarations allows the use of methods of identification information fusion in the information fusion center. The test results confirm the full usefulness of conflict redistribution rules in reports from ELINT-ESM sensors developed as a part of Dezert - Smarandache theory, with the best results presented in the PCR5 and PCR 6 rule.
The basic belief assignment model for ESM sensors and for combined primary and secondary (IFF) surveillance radars [15] can be applied to build models of different identification data fusion systems. The practical significance has first of all models compatible with STANAG 1241. It contains definitions corresponding to intersections of basic identification declarations. Therefore, the paper uses Dezert-Smarandache theory for calculation the basic belief assignment.
The conducted research showed that the best results obtained for the PCR6 rule when reports from three sources (from two sensors and the fusion system database) were processed simultaneously. This corresponds to synchronous processing of reports and involves delayed processing of a report from one of the sources. The research confirmed a slight advantage of the PCR6 rule over the PCR5 rule. This was mainly the case when the sensors sent information with a high degree of conflict.
Funding
This work was financed by the Military University of Technology under Research Project UGB 866.
Conflicts of Interest
The author declares no conflict of interest.
References
- NATO, Standardization Agreement STANAG No. 1241. NATO Standard Identity Description Structure for Tactical Use, Ed. 5, North Atlantic Treaty Organization, 05. 20 April.
- NATO, Standardization Agreement STANAG No. 1241 AO. NATO Joint Standard Identification Description, Ed. 6, Ratification Draft 1, North Atlantic Treaty Organization, 27 October.
- Smarandache, F.; Dezert, J. Applications and Advances of DSmT for Information Fusion (Collected Works), Volume 2, American Research Press (ARP), Rehoboth, 2006.
- Dezert, T.; Dezert, J.; Smarandache, F. Improvement of Proportional Conflict Redistribution Rules of Combination of Basic Belief Assignments. Journal of Advances in Information Fusion 2021, 16, 48–73. [Google Scholar]
- Pietkiewicz, T.; Kawalec, A. A method of determining the basic belief assignment for combined primary and secondary surveillance radars based on Dezert-Smarandache theory. In Proceedings of the 17th International Radar Symposium (IRS), Kraków; 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Djiknavorian, P.; Grenier, D.; Valin, P. DSm theory for fusing highly conflicting ESM reports. In Proceedings of the 12th International Conference on Information Fusion, Seattle, WA, USA, 6–9 July 2009; pp. 1211–1217. [Google Scholar]
- Matuszewski, J.; Dikta, A. Emitter location errors in electronic recognition system, XI Conference on Reconnaissance and Electronic Warfare Systems, Proc. of SPIE - The International Society for Optical Engineering, Volume 10418, No. 4/2017, art. no. 104180C, pp. C8. [CrossRef]
- NATO, Standardization Agreement STANAG No. 5516, Tactical Data Exchange - Link 16, Ed. 3, North Atlantic Treaty Organization.
- NATO, Standardization Agreement STANAG No. 4162, Identification Data Combining Process, Ed. 2, North Atlantic Treaty Organization.
- Valin, P.; Bossé, E. Using A Priori Databases for Identity Estimation through Evidential Reasoning in Realistic Scenarios, RTO IST Symposium on Military Data and Information Fusion, RTO-MP-IST-040, Prague, Czech Republic, 12-1 – 12-12, (20-). 22 October.
- Dezert, J.; Smarandache, F. Importance of sources using repeated fusion with the proportional conflict redistribution rules #5 and #6, 2010, hal-00471839, https://hal.science/hal-00471839.
- Smarandache, F.; Dezert, J. Applications and Advances of DSmT for Information Fusion (Collected Works), Volume 1, American Research Press (ARP), Rehoboth, 2004.
- Smets, Ph. Belief functions: the disjunctive rule of combination and the generalized Bayesian theorem. International Journal of Approximate Reasoning 1993, 9, 1–35. [Google Scholar] [CrossRef]
- Smets, Ph.; Kennes, R. , The transferable belief model. Artificial Intelligence 1994, 66, 191–234. [Google Scholar] [CrossRef]
- Pietkiewicz, T.; Kawalec, A.; Wajszczyk, B. Analysis of Fusion Primary Radar, Secondary Surveillance Radar (IFF) and ESM Sensor Attribute Information under Dezert-Smarandache Theory, The 18th International Radar Symposium (IRS), Prague, Czech Republic, pp. 1–10 (-30 2017). 28 June. [CrossRef]
- Stevens, M. C. Secondary Surveillance Radar, Artech House,1988.
- Djiknavorian, P.; Grenier, D.; Valin, P. Analysis of information fusion combining rules under the DSm theory using ESM input, 10th International Conference on Information Fusion, FUSION 2007, Québec, Canada, 9-. 12 July.
Figure 1.
The interpretation of STANAG 1241 using the Venn diagram.
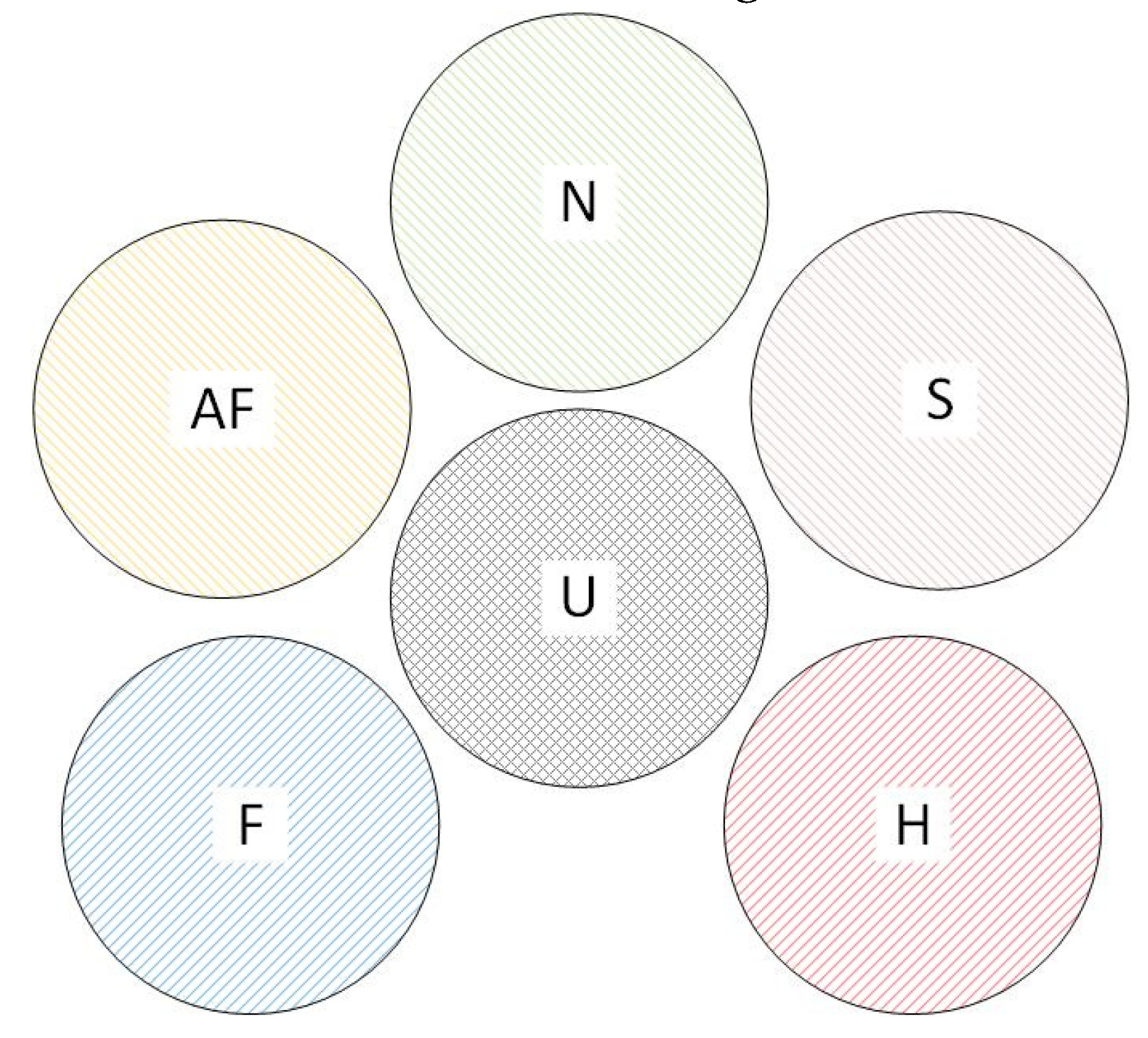
Figure 3.
The diagram of the information fusion process in the information fusion center IFC for two sensors and electronic entity record from IFC database. Explanations: mi– BBA measure vector of i-th sensor, mF – generalized BBA measure vector that is a part of the electronic entity record in IFC, EER – electronic entity record in IFC database.
Figure 3.
The diagram of the information fusion process in the information fusion center IFC for two sensors and electronic entity record from IFC database. Explanations: mi– BBA measure vector of i-th sensor, mF – generalized BBA measure vector that is a part of the electronic entity record in IFC, EER – electronic entity record in IFC database.
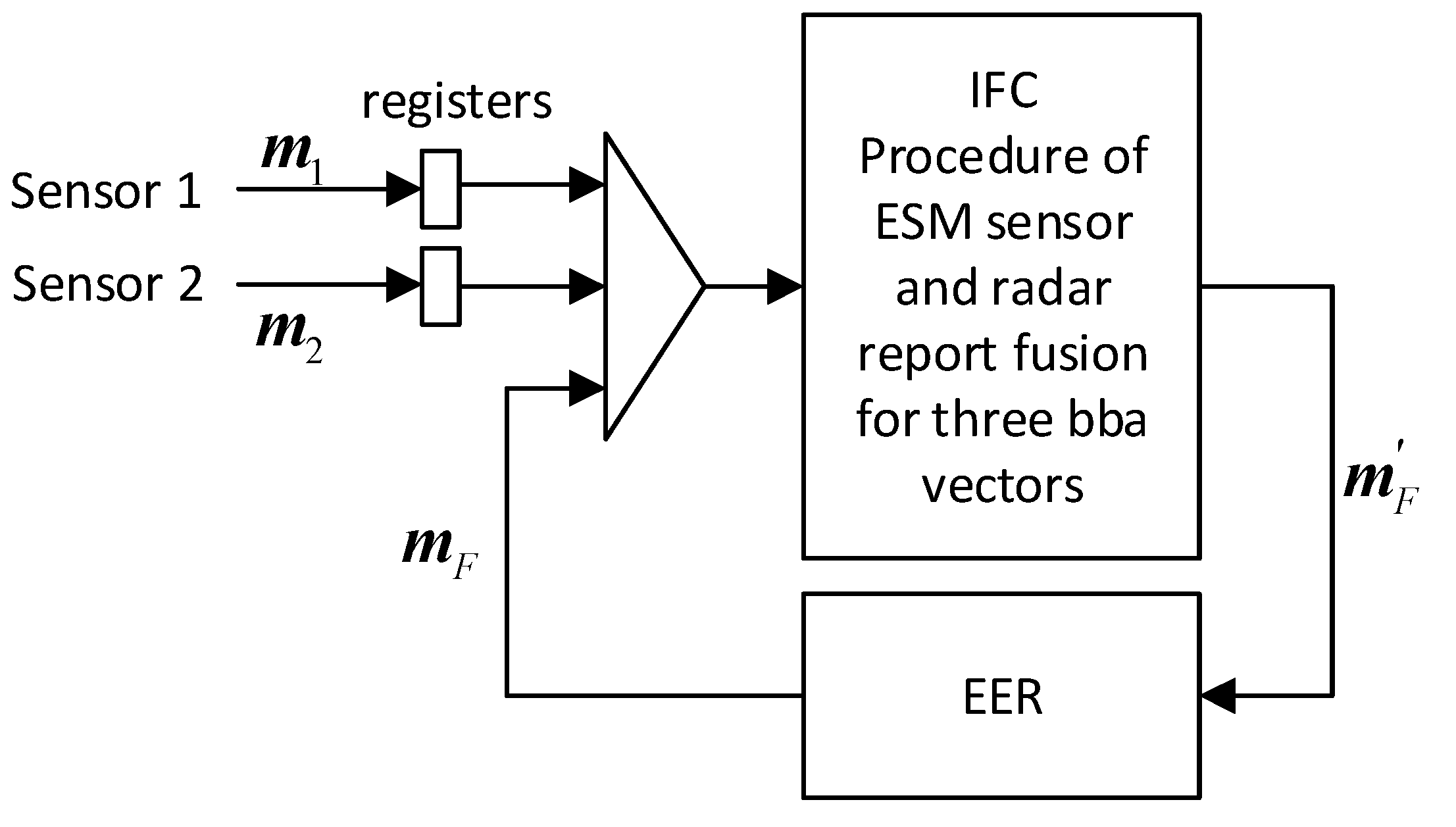

Table 1.
Transformation of the base belief assignment mass into the secondary belief assignment mass.
Table 1.
Transformation of the base belief assignment mass into the secondary belief assignment mass.
| Base identification → | FB | NB | HB |
|---|---|---|---|
| FS | 0 | 0 | |
| NS | 0 | 0 | |
| HS | 0 | 0 | |
| AF | 0 | ||
| S | 0 |
Table 2.
Belief mass values for the second sensor for the scenarios 1 and 5.
| Type of identification | F | N | H | AF | S | U |
|---|---|---|---|---|---|---|
| Correct identification (80% of events) | 0.6 | 0.1 | 0 | 0.2 | 0 | 0.1 |
| Incorrect identification (20% of events) | 0 | 0.1 | 0.6 | 0 | 0.2 | 0.1 |
Table 3.
Belief mass values for the second sensor for the scenario 2.
| Type of identification | F | N | H | AF | S | U |
|---|---|---|---|---|---|---|
| Correct identification (80% of events) | 0.7 | 0.1 | 0 | 0.1 | 0 | 0.1 |
| Incorrect identification (20% of events) | 0 | 0.1 | 0.7 | 0 | 0.7 | 0.1 |
Table 4.
Belief mass values for the second sensor for the scenario 3.
| Type of identification | F | N | H | AF | S | U |
|---|---|---|---|---|---|---|
| Correct identification (80% of events) | 0 | 0.1 | 0.6 | 0 | 0.2 | 0.1 |
| Incorrect identification (20% of events) | 0.6 | 0.1 | 0 | 0.2 | 0 | 0.1 |
Table 5.
Belief mass values for the second sensor for the scenarios 4 and 6.
| Type of identification | F | N | H | AF | S | U |
|---|---|---|---|---|---|---|
| Correct identification (80% of events) | 0 | 0.1 | 0.7 | 0 | 0.1 | 0.1 |
| Incorrect identification (20% of events) | 0.7 | 0.1 | 0 | 0.1 | 0 | 0.1 |
Table 6.
Transformation of the base belief assignment mass into the secondary belief assignment mass for combined primary and secondary surveillance radar.
Table 6.
Transformation of the base belief assignment mass into the secondary belief assignment mass for combined primary and secondary surveillance radar.
| (Scenario Nr, Base identification) → | (1,FB) | (2,NB) | (3,HB) |
|---|---|---|---|
| FS | 0.8 | 0 | 0 |
| NS | 0 | 0.5 | 0 |
| HS | 0 | 0 | 0.7 |
| AF | 0.2 | 0.3 | 0 |
| S | 0 | 0.2 | 0.3 |
Table 7.
Belief mass values for the second sensor (ESM) for the scenario 1.
| Type of identification | F | N | H | AF | S | U |
|---|---|---|---|---|---|---|
| Correct identification (80% of events) | 0.6 | 0.1 | 0 | 0.2 | 0 | 0.1 |
| Incorrect identification (20% of events) | 0 | 0.1 | 0.6 | 0 | 0.2 | 0.1 |
Table 8.
Belief mass values for the second sensor (ESM) for the scenario 2.
| Type of identification | F | N | H | AF | S | U |
|---|---|---|---|---|---|---|
| Correct identification (80% of events) | 0 | 0.5 | 0.3 | 0 | 0.2 | 0 |
| Incorrect identification (20% of events) | 0 | 0.4 | 0.2 | 0 | 0.3 | 0.1 |
Table 9.
Belief mass values for the second sensor (ESM) for the scenario 3.
| Type of identification | F | N | H | AF | S | U |
|---|---|---|---|---|---|---|
| Correct identification (80% of events) | 0 | 0.1 | 0.7 | 0 | 0.1 | 0.1 |
| Incorrect identification (20% of events) | 0 | 0.1 | 0.6 | 0 | 0.2 | 0.1 |
Table 10.
Belief mass values for the second sensor (ESM) for the scenario 4.
| Type of identification | F | N | H | AF | S | U |
|---|---|---|---|---|---|---|
| Correct identification (80% of events) | 0.1 | 0.7 | 0.1 | 0 | 0 | 0.1 |
| Incorrect identification (20% of events) | 0 | 0.1 | 0.6 | 0 | 0.2 | 0.1 |
Table 11.
Belief mass values for the second sensor (ESM) for the scenario 5.
| Type of identification | F | N | H | AF | S | U |
|---|---|---|---|---|---|---|
| Correct identification (80% of events) | 0.6 | 0.1 | 0 | 0.2 | 0 | 0.1 |
| Incorrect identification (20% of events) | 0 | 0.1 | 0.6 | 0 | 0.2 | 0.1 |
Table 12.
Belief mass values for the second sensor (ESM) for the scenario 6.
| Type of identification | F | N | H | AF | S | U |
|---|---|---|---|---|---|---|
| Correct identification (80% of events) | 0.1 | 0.7 | 0.1 | 0 | 0 | 0.1 |
| Incorrect identification (20% of events) | 0.6 | 0.1 | 0 | 0.2 | 0 | 0.1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



