
Submitted:
29 June 2023
Posted:
30 June 2023
You are already at the latest version
Abstract
Indoor localization (IL) is a significant topic of study with several practical applications. The area of IL has evolved greatly in recent years due to the introduction of numerous technologies such as WiFi, Bluetooth, cameras, and other sensors. Despite the growing interest in this field, there are numerous challenges and drawbacks that must be addressed to develop more accurate and sustainable systems for IL and its real-life applications. This review study gives an in-depth look into IL, covering the most promising artificial intelligence-based and hybrid strategies that have shown excellent potential in overcoming some of the limitations of classic methods. In addition, the paper investigates the significance of high-quality datasets and evaluation metrics in the design and assessment of IL algorithms. Furthermore, this overview study emphasizes the crucial role that machine learning techniques, such as deep learning and transfer learning, play in the advancement of IL. A focus on the importance of IL and the various technologies, methods, and techniques that are being used to improve it. Finally, The survey highlights the need for continued research and development to create more accurate and scalable techniques that can be applied across a range of industries, such as evacuation-egress routes, hazard-crime detection, smart occupancy-driven energy reduction and asset tracking and management.
Keywords:
Indoor localization
; Wireless signal techniques
; Computer vision techniques
; Deep and transfer learning
; Hybrid techniques
1. Introduction
1.1. Preliminary
Indoor localization (IL) is the process of identifying the location of an object or person inside a building or enclosed space. This can be achieved using various techniques such as radio frequency signals [1], acoustic signals [2], magnetic fields [3,4], and vision-based methods [5]. Recently, IL has gained a lot of attention from researchers in various industries, including healthcare [6,7], logistics [8], manufacturing [9], retail [10], security [11,12] and emergency prepardness and evacuation. The research in IL has witnessed a significant progress over the last decade. Early IL techniques relied on wireless fidelity (WiFi) signals and Bluetooth beacons to locate objects and people [13]. However, these techniques have limited accuracy and are susceptible to interference. To further improve accuracy, ultra-wideband (UWB) [14], light fidelity (Li-Fi) [15], and computer vision-based systems [16] are proving instrumental. UWB technology uses short pulses of radio waves to measure the time of flight between devices, providing precise location information. Li-Fi technology, on the other hand, uses light waves to transmit data and can be used to create a network of location beacons.
Despite the recent growth and attention, IL faces several challenges. For instance, IL techniques typically require a substantial amount of data to achieve high accuracy [17,18]. However, collecting data can be challenging due to privacy concerns or limited access to the building, leading to insufficient data for accurately training machine learning (ML) models [19]. Similarly, when applying DL models to IL, several issues arise that need to be addressed. One of the main challenges is the scarcity of data for specific labels [20,21]. In many cases, there may not be enough labeled data available for training the model to accurately identify and locate objects or positions within an indoor environment. This limitation can hinder the model’s performance and overall accuracy [22,23]. Furthermore, a significant data imbalance problem often arises when dealing with specific labels [24]. This means that the dataset may contain an unequal distribution of samples across different classes or labels, making it difficult for the model to learn and generalize effectively. The lack of balanced representation can lead to biased predictions and lower performance in identifying and localizing specific objects or positions [25].
To overcome the abovementioned challenges, researchers and practitioners in the field of indoor localization need to explore various strategies. One approach is to augment the available data by generating synthetic data or using transfer learning (TL) or deep transfer learning (DTL) techniques to leverage pre-trained models [26,27]. This helps to compensate for the lack of labeled data and improve the overall performance of deep learning (DL) models [28,29]. Furthermore, signal interference and cost constraints exacerbate the problem of data scarcity. Security and privacy also remain major concerns [30,31]. IL involves collecting and handling confidential personnel information, such as location tracking [32], data interception [33], data misuse [34], and identity fraud [35], which raise potential risks.
To address deep neuron network (DNN) limitations, recently, DTL has emerged as a powerful tool for IL [36,37]. Deep neural network are trained on a large dataset to learn features that are relevant for localization. These features are then transferred to another network, trained on a smaller, labeled dataset specific to the target indoor environment and enclosed spaces. This approach allows the new network to leverage the knowledge and representations learned by the larger network, improving localization accuracy even with limited training data [37]. In addition, DL utilizes a limited set of costly labeled data along with a vast quantity of economical unlabeled data to enhance and refine a fully supervised solution without incurring additional expenses related to the collection of labeled data [38]. To this end, Njima et al. [39] utilized a DNN approach to generate pseudo-labels for unlabeled data. They did this by using a supervised setting with labeled training data. Next, they combined the labeled data with the pseudo-labeled data and trained a generic model for localization. To amplify the influence of the most reliable samples on the training process, they used a weighting coefficient. This approach showed that DL is essential in dealing with data scarcity.
Moreover, exploring DTL is crucial for achieving accurate IL due to several reasons. First of all, interior surroundings are generally complicated, with several variables that might impair location estimate accuracy [40]. Obstacles, signal attenuation, and multipath propagation are a few examples of these variables. With the aid of DTL, we are able to train DNN on a vast dataset of interior spaces before optimizing them for a particular environment while taking into consideration its particular properties [41]. This may considerably increase location estimation accuracy, particularly in intricate interior settings [42]. Secondly, DTL can assist in resolving the issue of insufficient data. As IL datasets might be limited and DNN needs a lot of data to train, it can be challenging to develop precise models. We can still obtain great accuracy, regardless of the lack of data, by beginning with pre-trained deep neural networks and refining them on smaller IL datasets [43]. Finally, DTL can aid in minimizing the time and resources needed for accurate model training. Deep neural networks can be time- and resource-intensive to train from scratch. Nonetheless, we can significantly reduce the time and resources required to build accurate IL models by utilizing the prior information acquired from training on other datasets.
1.2. Paper Contributions
While there have been various review articles published discussing the contributions of ML and DL in indoor localization, there is currently a gap in the literature regarding the surveys exploring DTL methodologies. This study aims to address this gap by highlighting the significant role of ML techniques, specifically DL and TL/DTL, in the advancement of indoor localization. These techniques have demonstrated excellent potential in enhancing the accuracy and scalability of IL systems. Moving on, the review study discusses the importance of IL in various practical applications, including evacuation-egress routes, hazard-crime detection, smart occupancy-driven energy reduction, and asset tracking and management. Additionally, the review explores the challenges and limitations of traditional IL methods and highlights the potential of artificial intelligence-based and hybrid strategies in overcoming these limitations. The significance of high-quality datasets and evaluation metrics in the design and assessment of IL algorithms is also investigated. It also emphasizes future research directions, such as the need to create more accurate and scalable IL techniques that can be applied across different industries. All in all, this review aims to contribute to the existing body of knowledge in this area, and our key contributions can be summarized as follows:
- Comparing the contribution of this review with other existing IL surveys.
- Evaluating various technologies used in IL and discussing their advantages, limitations, and suitability for specific indoor environments or use cases.
- Overviewing the fundamental techniques and approaches used in IL.
- Investigating AI, DL and DTL techniques used to improve performance of IL systems.
- Identifying unresolved challenges and determining future directions that have the potential to enhance the performance of IL solutions.
Table 1 provides a comprehensive overview of the main contributions of this review in comparison to other IL surveys. It covers various aspects such as the discussion of fine-tuning, domain adaptation (DA), DL and ML techniques, FMT, technology used, datasets, application (app.), evaluation metrics, challenges, and future research directions.
1.3. Background of IL
1.3.1. Bibliometric Analysis
The rapid growth of IL- and DL-based research studies is demonstrated in Table 2, where it is evident that DL alone has contributed to more than 10% of the IL literature. This not only indicates the growing trend of using DL techniques in IL but also highlights the ample opportunities for researchers to further explore the potential of DL in this field. Consequently, a thorough investigation of the existing literature on DL-based IL becomes essential. Furthermore, Figure 1 provides statistical information regarding published DL-based IL articles in the most prominent journals focusing on IL. Moving forward, Figure 2(a) and Figure 2(b) show that over the last four years, more than 6000 research papers have been published, with an average of more than 1500 articles per year across various mediums such as journals, conferences, books, and review papers.
1.3.2. Concept
The concept of any IL system should follow three main steps: data collection, preprocessing, and classification for position estimation or tracking. However, these steps can vary depending on the technique used. Figure 3 demonstrates the different concepts that can be used to build an IL system. Starting with data collection, various technologies such as WiFi, cameras, and sound can be used to power an IL system. More details on these technologies are provided in Section 3. In some cases, the collected data may require preprocessing to improve performance. The main step involves using different techniques and algorithms, and the figure illustrates traditional techniques, classical ML, DL, federated learning, and TL [55,56,57].
Overall, the process of IL involves collecting data through different technologies, such as WiFi, cameras, and sound, and then processing it using various techniques and algorithms, including traditional techniques, classical ML, DL, federated learning, and transfer learning. The collected data may also require preprocessing for improved performance, making the overall process of IL complex but highly efficient. More details on the various technologies used in IL can be found in Section 3.
1.3.3. Taxonomy
A taxonomy of IL systems is proposed and illustrated in Figure 4 with that goal in mind. The technology used in IL is described in the paper, along with the datasets used for training and testing, the basic approaches and procedures used, and the AI algorithms (classical ML and DL) utilized. Several IL applications and measures used to assess their effectiveness are also covered in the study. In addition, the challenges confronting IL now and in the future are discussed, including problems with accuracy, scalability, cost, privacy, and security. The next stage is to undertake a critical analysis and debate to pinpoint the constraints and challenges associated with creating IL systems. The study states by identifying and analyzing the problems that have not yet been solved but are gaining more attention from researchers.
The rest of the paper is organized as follows. Section 2 describes the most commonly used public datasets that can be powered by different sensors, along with potential applications for IL and metrics used to evaluate these systems. Section 3 provides a detailed discussion of the various technologies used in IL. Section 4 focuses on the methods and techniques used in IL and is categorized into two subsections: ranging and enhancing techniques, and traditional methods and algorithms. classical ML and DL algorithms are listed in Section 5 and Section 6. To conclude with different approaches, Section 7 provides details of various new techniques and algorithms that exploit the field of TL. We conclude our survey by discussing the most important challenges and future directions that can be adapted in the future.
2. Dataset, Applications and Evaluation Metrics
In recent years, advancements in IL, as well as the spread of technology and equipment, have permitted a wide range of location-based services (LBS). This technology generates massive dataset that may be repurposed to construct new applications. Several data-sets are available for IL development and study. A selection of the most often used depending on the technologies in use, such as Bluetooth, WiFi, camera, 5g, and so on. as example, Djosic et al. [58] describe a creative hybrid method for addressing the challenge of cost-effective UWB-based localization in complex and confusing interior situations. Table 3 illustrates different existing public databases. These datasets are organized based on the technology, type of the data, number or duration of the samples, and dimension or area where the data was collected.
Exploiting these datasets, IL has many uses in numerous sectors, and the performance of IL systems in each application is evaluated using various indicators. Following are some examples of apps and the metrics used to evaluate them: (i) IL can be used in healthcare to track the position of patients, employees, and equipment, enhancing patient safety and workflow efficiency. The tracking error, which quantifies the departure of the estimated position from the real location of the target item. (ii) Logistics and Warehousing: IL may be used to track the position of items and equipment in logistics and warehousing, enhancing inventory control and workflow efficiency. (iii) IL in educational institutions may be utilized to track the position of students, professors, and equipment, boosting campus safety and workflow efficiency. (iv) IL has the potential to improve rescue and emergency response by allowing rescuers to more quickly and precisely find those in need of assistance. Here some high risk application such as : Building evacuations, Search and rescue, natural and man-made disasters such as explosions, earthquakes, etc. This paper [77] describe a bluetooth low energy-based interior localization system for a museum. Visitors wearing BLE devices broadcast packets, which geolocated receivers gather and use to estimate the visitor’s position using a neural network and the non-linear least squares approach. The accuracy of the system is less than one meter. Also, Santoro et al. [78] offer a novel tracking that monitors player performance in real-time by combining inertial sensors and UWB location. The system’s portability, versatility, low weight, energy-efficiency, and ease of operation make it appropriate for use both indoors and outdoors. The following Table 4 summarizes various applications based on the approach and technology used.
Although IL systems offering several benefits in various kinds of industries, they are required to assessed with performance metrics to ensure that they satisfy specific requirements. The review metrics are employed in the instance of IL to measure the system’s accuracy and reliability in establishing the position of a target object or person. These metrics help identify the system’s strengths and weaknesses and assist the development of new algorithms and technologies. Evaluation metrics are particularly important when comparing different IL approaches or models. It is possible to determine which system or model performs better and identify the factors that lead to increased effectiveness through contrasting them using the same set of metrics. It can utilized to define benchmarks or standards for IL performance. If an intelligent learning (IL) system achieves a certain level of accuracy, it can be considered to have met a minimum performance standard. This criterion can be used to guide the development of future systems and inform purchasing decisions. Table 5 illustrates the various metrics that can be used to evaluate a system, model, or application.
3. Technology Using in IL
3.1. WiFi
This method collects signal strength measurements from a number of known reference points, such as WiFi access point RSSI (Received Signal Strength Indicator) values. These measurements are used to generate a fingerprint of the wireless environment at each reference point, which can then be used to locate a device based on the signal strength it receives from the surrounding access points. The accuracy of this method is affected by the number of reference points, the density of WiFi access points, and the presence of obstacles that can block or reflect wireless signals. Some recent work [86,87,88] exploit the WiFi with various techniques to improve the accuracy; In this study [89] the authors proposed a method based on WiFi fine time measurements (FTM) to increase location accuracy in complicated interior environments. Ibrahim et al. [90] look into the characteristics and factors that affect ranging performance, as well as revisiting common error correction approaches for WiFi time-based ranging systems.
3.2. Bluetooth (BLE)
Bluetooth is a wireless technology that connects devices over short distances. It broadcasts and receives data through radio waves at 2.4 GHz. This technique is used for IL by creating a map of BLE beacons in a building or location and then employing the signals to establish a device’s position. This is conducted by monitoring the intensity of signals from numerous beacons and utilizing trilateration to compute the device’s position based on the beacons’ known positions and signal strengths. One of the primary advantages of Bluetooth is its low power consumption and suitability for IL various paper exploited the simplicity of Bluetooth and the low cost [91,92].
3.3. Inertial
Inertial sensing involves the use of sensors to detect and measure an object’s or system’s motion and orientation. Accelerometers, gyroscopes, and magnetometers are common sensors that operate together. Accelerometers measure three-dimensional linear acceleration, gyroscopes measure rotational velocity, and magnetometers detect magnetic fields. This data is used to determine an object’s location, orientation, and velocity in three dimensions. Navigation, robotics, and virtual and augmented reality are all uses of inertial sensing. High accuracy and precision readings can be obtained by combining data from these sensors. Herath et al. [67] achieved very competitive performance by only exploiting the inertial measurement. However, another work by the same authors [93] utilized fusion techniques to further improve their results.
3.4. Zigbee
Zigbee is a wireless communication technology that uses low-power digital radios to establish personal area networks (PANs). It operates in the 2.4GHz frequency spectrum and is intended for low-cost, low-power, and low-data-rate applications. The mesh network topology of Zigbee networks allows devices to connect even when they are not in close proximity to a central controller or router. It offers excellent security and scalability by allowing several devices to connect to a single network. IL may utilize Zigbee to construct a map of Zigbee-enabled devices and identify a device’s position in a variety of ways. It also supports multi-hop networks, which increases location accuracy by combining technologies such as RFID, cameras, and WiFi to build more powerful indoor location systems.
3.5. Long Range (LoRa)
LoRa is a wireless communication technology that enables long-distance communications between devices by utilizing a low-power, wide-area network (LPWAN) by exploiting a spread spectrum modulation technology. In the context of IL, LoRa is used to track the location of devices within a building or other enclosed space using a network of LoRa-enabled gateways and sensors. This can be useful for asset monitoring, facilities management, and security applications. In the current paper [94], the authors make a study to proves the potential of LoRa technology for IL applications.
3.6. Radio-Frequency Identification (RFID)
RFID technology is commonly utilized for IL, tracking the real-time position of people and things. The device are classified based on their frequency bands: low-frequency systems have a read range of few centimeters and work at 125-134 kHz, high-frequency systems operate in the 13.56 MHz band and have a read range of several meters, and ultra-high frequency (UHF) systems operate between 860-960 MHz and have a read range of several meters, if not tens of meters. RFID-based IL systems are less expensive to deploy than other technologies; nonetheless, they are susceptible to interference from other electronic devices and may perform poorly in locations with high metal content, RF-shielded zones, and high-interference scenarios. Furthermore, they are less exact than other technologies in general, and the quality of the location information varies based on the specific implementation and the environment in which the device is utilized.
3.7. Ultra Wideband (UWB)
UWB technology is distinguished by the use of extremely brief pulses of radio frequency energy, often of a few nanoseconds or less. These pulses have a broad bandwidth, usually several gigahertz, allowing for precise range measurements. Due to its large bandwidth, UWB is immune to interference from other wireless technologies and may be employed in a congested radio spectrum.
Several experts have explored approaches to address issues such as high latency and limited bandwidth by improving the performance of sensor-based UWB algorithms. Li et al. [95] proposed an extended kalman filter (EKF)-based approach for high-frequency 3D localization to improved accuracy and reduced latency utilizing inertial measurement unit (IMU) and UWB sensor data. Grobwindhager et al. [96] presented a system with a theoretical upper bound of 2.3 kHz that enables a large number of tags by self-localize. Macoir et al. [97], proposed an indoor drone solution based on infrastructure anchor nodes that is battery operated that does not require a cable backbone. The resulting system function at a rate of up to 2892 Hz. In addition, the average current consumption of nodes is only 27 mA. To increase estimate accuracy and robustness, Xu et al. [98] suggest a fixed-lag extended finite impulse response smoother (FEFIRS) technique for fusing inertial navigation system (INS) and UWB data.
3.8. Visible Light
Visible Light Communication (VLC) is a data transfer system that takes use of the visible light spectrum. It transmits data by adjusting the intensity of light-emitting diodes (LEDs), which are often used for building illumination. The system generally employs a light source (such as LED) and a photodetector, which receives light and converts it into an electrical signal. Li-Fi technology is a form of VLC technology that uses a unique type of LED to provide a high-speed data connection similar to WiFi but using visible light rather than radio waves. VLC has a variety of advantages, including high security (since light cannot pass through walls), low power consumption, and the ability to operate in the presence of radio frequency interference. However, it has some drawbacks, including the need for line of sight and a clear path between the light source and the photodetector. It is suitable for particular applications and conditions where other wireless communication methods are ineffective. Several variables influence the range and frequency of a VLC system, including the intensity of the light source, the sensitivity of the photodetector, and the characteristics of the surroundings. VLC systems typically have a range of a few meters, but this may be improved by employing more powerful light sources and more sensitive photodetectors. A VLC system’s frequency is normally between 380 nm and 780 nm, or 400 THz to 790 THz. Various work used this technology associate with different technique and algorithms [99,100,101].
3.9. Vibration and Acoustics
Vibration and acoustic approaches have received attention over the past few decades due to their potential in several IL applications. These approaches use the distinctive patterns of vibrations and sound produced by movement inside an area to provide a very efficient and diverse way of tracking and monitoring. They are especially effective in complicated interior contexts where other detection technologies may be inaccurate or impracticable. With the growing demand for efficient and dependable IL solutions, vibration and acoustic methods are gaining traction as a feasible option for a variety of applications, including security and surveillance, asset tracking, and structural health monitoring [102]. The expansion of advanced signal processing techniques, as well as the availability of low-cost sensors, has accelerated the rise of these approaches, making them an appealing alternative for businesses and organizations of all sizes. Here we can found some recent work exploit this kind of technology [103,104,105]
3.10. Vision
Computer vision algorithms are a useful tool for IL since they’re able to collect visual data from Cameras, phones, Kinect, RGB-D and other sensors and analyze it to establish the precise location of items or people within a building. To give extremely precise position information, these algorithms take consideration a variety of characteristics including lighting conditions, object orientation, and picture quality. We can cited few paper that exploit images and camera devices for accurate localization [106,107,108].
The Table 6 demonstrated and summarized the differences and features of each technology used on IL in terms of energy consumption, security, cost, and area coverage.
4. IL Methods and Technique
IL attract many research and industrial to realise the specif application according the needed and the technology used. This section describe various technique and algorithm according the technique used or algorithm deployed. Each method has is own advantaged and disadvantage.
4.1. Ranging and Enhancing Techniques
In this section a description of various technique based measurement to find location device or target based; RSSI, CSI, ToA, AoA, RTT. Table 7 gives a general view about advantage, limitation, accuracy and sensitivity.
4.1.1. Received Signal Strength (RSSI)
RSSI (Received Signal Strength Indicator) is a well-known technique for IL. It measures the intensity of a wireless signal in a certain region to compute the distance between a wireless device and an access point. RSSI is commonly measured in decibels (dBm) (decibel-milliwatts). The path loss (pl) model is a widely used equation for indoors localization that estimates distance using RSSI. The following is the formula:
where is the path loss at distance d. d is the distance between the wireless device and the access point. n is the Path Loss exponent, which is a measure of the environment’s radio frequency (rf) absorption. A is the path loss at a reference distance, generally 1 meter.
Nonetheless, this equation is a simplified model, and the accuracy of the localization is dependent on the environment’s rf absorption, the number of access points, and the building’s complexity. RSSI can produce inaccurate distance estimates due to phenomena such as fading, shadowing, refraction, scattering, and reflections. To overcome these challenges, several approaches like as the kalman filter have been utilized to decrease fluctuations and improve the accuracy of RSSI readings under indoor environments.
4.1.2. Channel State Information (CSI)
Channel State Information (CSI) is a set of data that reflects the characteristics of the wireless channel between a transmitter and a receiver in a wireless communication system. It is typically represented a set of complex numbers that indicate the amplitude and phase of the signal received [109]. CSI estimate the position of a device in an indoor environment through various methods called fingerprinting, trilateration, etc .
4.1.3. Time of Arrival (ToA)
ToA or Time of Flight (ToF) is a technique that determines the position of a device or person inside a structure by measuring the time it takes for a signal to travel from a known location (such as a fixed reference point or beacon) to the device or person. This approach may be utilized with a variety of signals, including radio waves, sound waves, and light waves.
where ToA is the time of arrival of the signal, and Speed of Signal is the speed of the signal being used (such as the speed of light for optical signals, or the speed of sound for audio signals).
These works [110,111] exploit the TOA technique, the author [112] proposes new modifications to improve accuracy and eliminate error interference through the use of joint Kalman filtering. Also, Pala et al. [113] suggest a revised technique to leading edge identification for estimating TOA of UWD signals to improve the accuracy. In a similar paper, [114] Obeidat et al. investigate the effect of multiple spectrum bandwidths and carrier amounts on localization accuracy. The aim is to identify anomalous signals that negatively impact localization performance and to reduce the errors. Stahlke et al. [115] provided a way to predict an anomaly score for the channel of ToA using UWB system founded generative DL models based on channel impulse responses and Variational Autoencoder (VAE). The author [116] demonstrated a sophisticated approach for calculating the TOA in an echo environment. The method entails a strategy for removing echoes by using the power spectrum of the signal associated with filter.
4.1.4. Angle of Arrival (AoA)
The approach estimate the angle at which the broadcast signal impinges on the receiver using antenna arrays on the reception side. This is accomplished by estimating the time difference of arrival at specific antenna array elements. The key benefit of AoA is that it can estimate device/user position in a 2D or 3D environment. However, AoA requires more sophisticated equipment and rigorous calibration than RSS approaches, and its accuracy degrades as the transmitter-receiver distance increases. Liu et al. [117] include a Transformer approach to clean a signal in order to obtain a good estimation of AoA on non line of Sighth (NLOS). Koutris et al. [118] provides a new IL approach based on a Deep Neural Network that estimates the AoA using the (RSSI) value and the in-phase and quadrature-phase (IQ).
4.1.5. Round Trip Time (RTT)
RTT measures the time it takes for a signal to be delivered from a device to a reference point and then received back by the device. This approach is more accurate than others (like RSSI) since it considers the signal’s distance and propagation speed. RTT-based solutions, on the other hand, can be complicated and need extra hardware and infrastructure [86,87,88]. Figure 5 depicts the design and development of a WiFi RTT-based indoor location identification system that combines the benefits of fingerprint and ranging-based approaches to address the various problems of interior settings.
4.2. Localization Methods and Algorithms
In order to locate a device or a person inside of a structure or another enclosed environment, wireless signal-based approaches are frequently utilized in IL research. The most often used wireless signal-based approaches include:
4.2.1. Trilateration
Trilateration is one of the most method to determining a device’s location by measuring the distance between it and three reference points. Using the coordinates of the three reference sites and the distances from the device to each of them, a sequence of non-linear equations may be used to determine the device’s coordinates. The basic equation for trilateration is:
where x, y are the unknown coordinates of the device, x1, y1, x2, y2, x3, y3 are the known coordinates of the three reference points, and d1, d2, d3 are the known distances between the device or person and the reference points or beacons.
4.2.2. Triangulation
Triangulation is a technique for determining a device’s or a person’s location by measuring the distance between the device and several access points (AP) (such as WiFi or Bluetooth beacons) distributed throughout the facility. The position of the device is identified with a high degree of accuracy by monitoring the signal strength of the device at each AP and compare the known location of the AP. As application, this technique can be usied as ;indoor navigation, asset tracking, and location-based advertising, security purposes [119,120].
4.2.3. Centroid Method
This method can be used in IL to determine the position of an unknown node. Rather than using distance or angle measurements, this method employs a geometric connection between the locations of anchor nodes and the unknown target node. Once a reliable communication link is established between the anchor nodes and the target node, the anchor node locations create a geometric shape, and the centroid of that shape is used to determine the location of the unknown node. Different techniques that employ the centroid method have been presented in the literature, such as [121,122].
4.2.4. Distance Vector-Based HOPping (DV-HOP)
The primary idea behind DV-HOP [123] is to estimate the location of nodes in a network using a distributed and iterative technique. Each node in the network serves as both a broadcaster and a receiver, estimating its own position based on the RSSI and TOA measurements of its neighbors. This information is then used by the algorithm to estimate the position of additional nodes in the network, and iteration continues until the position estimations converge to a stable solution.
4.2.5. Fingerprinting
This is a method that involves mapping the strength of a radio frequency (RF) signal from a given place. To generate this map, or signature, the signal strength of a wireless network (such as WiFi) is measured at various locations within a building or other interior region. Once formed, the fingerprint may be used to locate a device inside the space by evaluating the current signal intensity and comparing it to the fingerprint. This approach is frequently used in conjunction with other localization methods to increase IL accuracy. A number of current and notable articles that use this strategy with various technologies are noted here [124,125]. The Figure 6 depicts the methods and procedure for exploiting and employing the fingerprint algorithm.
It is critical to understand that different IL methods and algorithms in this section have distinct advantages and disadvantages. Starting by trilateration, this method need three distance measurements however is affected by obstructions and signal interference, whereas triangulation relies on signal angles but is impacted by interference, reflections, and noise. The centroid approach computes the center point of RSSI readings, however it is susceptible to error due to signal propagation variations. DV-HOP estimates distances between nodes in a wireless sensor network using hop counts, nevertheless it needs a dense deployment of nodes and can be impacted by signal modification. Fingerprinting requires the creation of a database of signal features, nevertheless accuracy is affected by changes in the signal propagation environment, and the approach can be time-consuming to set up and maintain.
5. ML-Based Techniques
There are numerous ML-based solutions for IL, which is the use of technology to determine the location of an item or person within a structure. Different kinds of algorithms can be used: classical ML algorithms and DL algorithms.
5.1. Classical ML
Traditional ML (ML) algorithms, which including supervised learning, unsupervised learning, and semi-supervised learning, are frequently employed in IL due to their ability to extract pertinent features from data and generate predictions based on this information. Swargam et al. [126] proposed a two-level WiFi fingerprinting system that combines ML models trained, such as KNN, Random Forest, Decision Tree, and Support Vector Machine. The study [127] presented a WiFi-based multi-fingerprint and multi-classifier fusion solution that employed linear discriminant analysis to enhance accuracy after fusing it with three KNN, SVM, and RF utilizing a selected strategy based on entropy calculation. The authors [128] compares the effectiveness of unsupervised learning algorithms, particularly clustering approaches, in indoor location prediction with an accuracy range of 93-95%. Jaenal et al. [129] proposed a method for tackling Visual Place Recognition in interior contexts by abstracting a dense collection of georeferenced photos into a multivariate gaussian mixture model using an expectation-maximization technique. This paper [130] offers a visual-guidance artificial bee colony algorithm-based indoor evacuation concept. AlHajri et al. [131] presented a procedure based on the k-nearest neighbor algorithm with two stage cascade approaches, the first of which is aimed to determine the kind of indoor environment and the second of which is employed for localization. The suggested method was evaluated on a real-world dataset collected from RF signal measurements. In this work [132] indoor Bluetooth device localization based on RSSI using recursive continuous wavelet processing and the XGBoost predictor is presented. In this paper [133], a semi-supervised approach is proposed for indoor localization by exploiting a Rank-Based Iterative Clustering (RBIC) algorithm to generates a clustered dataset.
Several potential limitations and weaknesses to consider for classical ML. we can identify few of themes. The KNN algorithm become computationally expensive when working with large datasets and may not perform well with high-dimensional data. SVM is sensitive to the choice of kernel function and may not be well-suited for handling noisy data. Decision trees can overfit, and they may not generalize well to unseen data. Random forest may improve decision tree generalization, but it can also be computationally expensive and require careful hyperparameter tuning. XGBoost is sensitive to the choice of hyperparameters and may not work well with small datasets.
6. DL-Based Algorithm
DL-based algorithms have been proven to attain cutting-edge performance in IL challenges. When compared to traditional approaches, these methods can handle and analyze enormous volumes of data from multiple sensors such as WiFi, Bluetooth, and visual data. They also have the capacity to generalize well and resilience against noise, mistakes, and missing data. DL architectures like as CNNs, RNNs, VAE, and GANs can be employed, and recent research has focused on generating more efficient, accurate, and trustworthy models by mixing multiple types of architectures and data. In this segment, we will spotlight the most current and relevant work. A brief view of different paper using DL algorithm.
The authors [134] propose adopting an LSTM network for IL using UWB signals, exhibiting improved performance with a mean localization error of 7 cm when compared to existing approaches. The proposed design [135] incorporated the Internet of Things and digital twin technologies to deliver spatial-temporal traceability and visibility. A long-short-term memory network-enabled genetic indoor-tracking algorithm (GITA) was developed to locate product trolleys via Bluetooth and UWB. Ngamakeur et al. [136] investigate the system by building a dataset and utilizing DL algorithms such as CNN, RNN, and CNN-RNN, with the performance proving that Passive Infrared (PIR) -based localization and tracking with a distance error of 0.25m is achievable and practical. To improve the security and resilience of signature localization, the authors [57] propose a semi-supervised learning architecture that includes a correlation model for RSS fingerprints and a DL model for robust feature learning and location matching based on a denoising autoencoder and convolutional neural networks. This study [137] aims to present a TL-based model for system enhancement. The basic idea is to restructure data distributions in the target domain using knowledge transferred from the source domains. The Reinforcement Learning-based information fusion framework (RL-IFF) is a fresh fusion technique outlined in this study [138] to fill a gap in the area. To attain the best outcomes, this framework combines the Angle of Arrival (AoA) and Pedestrian Dead Reckoning (PDR) approaches. Wu et al. [139] provide a new mechanism for personalised IL that employs multi-level federated graph learning and self-attention to increase the capture of RSS inherent properties and learn how to combine information given by consumers. This study [140] proposes a graph-based IL system that generates a graph convolutional network (GCN) based on access point configuration. The author [141] is inspired to provide a novel method based on geometric DL, the idea is to convert fingerprints into graphs while allowing for the coexistence of several radio frequency signal technologies. where a GraphSAGE estimator is deployed for localization. Nour et al. [142] proposed scaled conjugate gradient using deep NN to increase performance system.
6.1. Artificial Neural Network (ANN)
An Artificial Neural Network is a computational model inspired by the structure and function of the human brain (ANN). It is made up of interconnected nodes (neurons) that evaluate and transmit data, allowing the network to learn and make forecasts or judgements based on the nature of the data and the application. Image and audio recognition, natural language processing, and control systems are all prominent applications for ANNs. It was first characterized as networks with three fundamental layers: an input layer, a single hidden layer, and an output layer. The structure of ANN has evolved over time, resulting in the creation of numerous subtypes such as Multi-Layer Perceptron (MLP), Deep Neural Network (DNN), Backpropagation Neural Network (BPNN), Feed Forward Neural Network (FFNN), Extreme Learning Machine (ELM), and Parallel Multilayer Neural Network (PMNN).
6.2. Auto-Encoder (AE)
is a neural network that employs unsupervised learning methods. Its design consists of two main components: the encoder and the decoder. The encoder component compresses the input data into a compact representation. The decoder component then uses this compact representation to recreate the original input as closely as possible. The architecture of an AE typically involves the encoder shrinking the data and the decoder expanding it. AEs are frequently utilized for tasks such as dimensionality reduction, detection of anomalies, and generative modeling, with the objective of learning a condensed representation of the input data while retaining its significant features. There are numerous types of AE, namely Denoising Auto-Encoder (DAE), Stacked Auto-Encoder (SAE), and Stacked Denoising Auto-Encoder (SDAE) (SDAE). IL systems that use AEs seek to get a filtered and enhanced version of the input signal: WiFi, BlE data, etc., as well as to investigate any hidden links between the compressed input data and the location estimation. This method decreases the complexity of high-dimensional signal data while also removing extraneous information from sparse data. we can listed some recent papers exploit the AE algorithm such as [143,144]
6.3. Convolutional Neural Network (CNN)
CNN is a DL system built for image and video processing jobs initialy. It works by processing grid-structured data, such as photographs, via a sequence of convolution and pooling layers to extract hierarchical characteristics from the input data. The convolutional layer employs filters to identify significant characteristics in the input, which are subsequently condensed and distilled by the pooling layer. This procedure is done several times, resulting in the extraction of increasingly complicated characteristics, which are subsequently utilized for predictions or classifications. CNNs may also be used to evaluate 1D signals, with 1D-CNNs analyzing sequential data [57,93].
6.4. Recurrent Neural Network (RNN)
It is a form of artificial neural network that is designed to handle sequence information, such as time series data. It works by iterating over the components in the input data and learning the hidden correlations between them. The RNN cell uses the current information and the previous layer to create a temporary output and a new state. However, RNNs can suffer from gradient vanishing and exploding issues, which can lead it to forget information from the beginning of the sequence. Long-Short Term Memory (LSTM) is an RNN alternative that was created to address these concerns. It includes a forget gate, an input gate, and an output gate, that all control the flow of information and help to avoid data loss [145,146,147].
6.5. Reinforcement Learning (RL)
Reinforcement learning is a sort of ML where an agent learns via experimentation and error in an environment by executing actions and getting rewards or sanctions. In the context of IL approaches, the agent might be a device or system that needs to establish its position within a building. The environment would be the inside space, and the activities the agent conducts would be observations or measurements of its surroundings. The rewards or penalties would be feedback indicating how near the agent’s predicted position is to its real location. The agent can learn to increase its localization accuracy over time by repeating activities and getting feedback. , which often essentially involves dealing with uncertainty, non-linear correlations between data and location, and changing environmental circumstances. To find a compromise between privacy protection and service quality Minghui et al. [148] present a reinforcement learning (RL)-based approach for adaptively adjusting the perturbation policy with safe exploration. the authors [149] in this paper provides a method for measuring RSS and extracting land data, with the process utilizing a Markov decision and RL algorithm. To achieve robust localization, the authors [150] combine the particle filter methodology with a reinforcement learning-based resampling method. Figure 7 illustrated a basic system exploiting RL.
6.6. Graphical Neuronal Network (GNN)
GNNs are a sort of ML model that makes predictions or solves classification tasks using graph-structured data as input. A GNN can be utilized to characterize the relationship between multiple fixed places and the relevant sensor readings, such as WiFi signal intensity, Bluetooth beacons, or inertial measurement unit data, in IL. The GNN operates on a graph structure, with nodes representing locations and edges representing links between them. The GNN changes node feature representations by aggregating data from neighbors, allowing it to capture complicated interactions between locations and sensor inputs. This data may then be utilized to forecast a user’s position based on sensor readings [152,153,154]. The authors [155] suggest an Indoor Trajectory employing a sequence-to-sequence learning architecture, a generation trajectory using a graph neural network, and a multi-head attention mechanism to capture correlations among trajectory points to increase performance. The this study the authors [156] proposed an effective hybrid technique for local feature matching and transformer deployment using a graph neural network.
6.7. Federate Learning (FL)
Federated learning is a concept for training ML algorithm that involves the cooperation and collaboration of several devices without the exchange of raw data. This method offers several advantages for IL, including greater privacy and security, stable models, lower latency, and higher accuracy. The models may be trained on a more diversified collection of data by merging data from various devices, resulting in increased generalization capabilities. However, federated learning has certain drawbacks, including the demand for fast and low-latency communication networks, increased complexity, possible bias in the final model, and increased power consumption. WE can enumerate some related work according communication efficiently, complexity training and Clustring method [55]. In the cluster-based FL techniques for IL, the information space is partitioned into various predetermined clusters. The FL-based learning model is then employed for classification and localization [157,158]. In terms of communication effectiveness The issue of communication overhead is addressed. Various techniques have been developed to improve by performing additional operations on the global server or local devices. These enhancements are intended to reduce network latency, improve accuracy and stability, and strike a balance between communication and compute efficiency. Some related works using this technique can be cited here [159,160,161]. The third methodology employs sophisticated strategies that are more complex in both the local model training and the global server’s FL aggregation process [162,163]. Figure 8 illustrate one of example that we can exploit the FL on IL.
6.8. Other Neuron Networks
6.8.1. Meta-Learning
It is a transfer Learning also described as "learning to learn," is a ML field that focuses on creating algorithms that can learn how to learn. The purpose of meta-learning is to create models that can efficiently adapt to new tasks by using information from prior activities [164,165]. Respectively both of this two work exploit the meta-learning, where Wei et al. reduce the error localization by 20% versus DL method. Also, Foliadis et al improve the performance achievement.
6.8.2. Attention Mechanisms
The attention mechanism is a DL computational process that allows a model to selectively focus on particular pieces of input data while creating an output. It is frequently used in natural language processing (NLP) and other jobs that require the analysis of data sequences. It is created as a function that calculates attention weights for each element in the input sequence. These attention weights describe the relative relevance of each input element and are used to weight each element’s contribution to the output.In general, allows a DL model to dynamically focus on the most important information in the input data while disregarding less relevant information. This can lead to more accurate and robust predictions, as well as increased model interpretability [155,166,167,168].
We can listed more algorithms power by DL algorithm and transformer techniques such as; (i) Multi-modal fusion is a technique for improving localization accuracy by combining several signals such as WiFi, Bluetooth, magnetic fields, or picture data [169,170]. Where, the authors in [170] investigate IL by multi-modal wireless signals such as WiFi, inertial measurement unit (IMU), and UWB. The multimodal localization is implemented as a multi-stream recurrent neural network.; (ii) Generative Adversarial Networks (GANs): Train GANs to generate synthetic training data, allowing for better generalization and improved performance on unseen indoor environments [39,171]. In both studies, the authors enhanced the data by employing the GAN method, which improved the performance; (iii) Semi-supervised learning employs a mix of labeled and unlabeled data to train prediction models capable of reliably predicting the position of items or devices inside an interior environment. The model learns from labeled data to spot the patterns and correlations between the different features, and then applies the acquired patterns to the whole dataset employing unlabeled data. The model can overcome the restricted availability of labeled data, which may be costly and time-consuming to acquire, and increase the accuracy of the model’s predictions by using both labeled and unlabeled data [172,173,174]. Table 8 summarize and regroup a set of recent papers exploiting DL approach’s.
6.9. Hybrid Techniques
Hybrid techniques for object localization involve combining multiple techniques, such as those based on wireless signals, computer vision, or other sensors, to improve the accuracy and robustness of the localization system. For example, a hybrid system might use a combination of WiFi signal strength, visual features from a camera, and inertial measurements from an accelerometer to determine the location of an object. The specific techniques and sensors used in a hybrid system will depend on the specific requirements of the application and the available hardware. By combining multiple sources of information, a hybrid system can potentially improve the accuracy and reliability of the localization system, particularly in challenging environments where a single technique may not be sufficient.
To use a hybrid technique for object localization, you will need a device with the necessary sensors and software to process the data from these sensors. You may also need a map or reference data for some of the techniques being used, such as a WiFi fingerprint database or a 3D model of the environment. The design and implementation of a hybrid localization system can be complex, as it requires integrating and synchronizing the data from multiple sources and choosing appropriate algorithms for combining the data. To improve performance, Chen ete al. [192] suggested a hybrid method that uses Deep-learning algorithms to extract a discriminative representation of ship motions and create a new fingerprint. The model is trained using an unsupervised learning technique and tested on real-world data, yielding a significant improvement in localization accuracy of 92.8% with a mean error of 0.68m. The authors in [193] recommended a method exploiting SfM using VLC and Image but the system requires good lighting conditions for a good performance. Yu et al. [194] developed a blended wireless positioning system utilizing an improved WiFi RSSI/FTM/MEMS sensors combination approach with new DL algorithm. Yue et al. [88] to improve the accuracy exploit the RTT of WiFi combined with multiple sensors, such as the magnetometer, barometer, accelerometer, and gyroscope. Herath et al. [57], the authors used a semi-supervised learning to improve security. The proposed system is divided into two parts: correlation and image generating fingerprints from RSS, using a hybrid CNN and AE for robust feature and denoising respectively. Figure 9 depicts the different hybrid systems based on the technology or algorithms deployed.
7. Deep Transfer Learning (DTL)
In transfer learning, domain adaptation and fine-tuning are two potent methods that can enhance the performance of models in a given domain. When the source and target domains are related, domain adaptation is useful, whereas fine-tuning is appropriate when the source and target tasks are related. Both methods have drawbacks, though, and how well they work depends on the nature of the data and the particular conditions of the task at hand.
7.1. IL Based on Fine-Tuning
One of the new AI algorithm can be increase the performance and exploit a pre-trained model is fine-tuned by changing its weights based on a very modest quantity of fresh data for a particular job. This method is frequently employed in TL to modify previously learned models for brand-new tasks, enhancing their performance in a target domain. As advantages through employing pre-trained models and reducing the quantity of training data required, fine-tuning can save time and costs. With customizing the model to the particulars of the assignment, it can also enhance the model’s performance in the target domain. Nevertheless, when the target job differs significantly from the task that the pre-trained model was first trained on, fine-tuning might be problematic. This can call for substantial changes to the model’s design or more training data. Also, when there is a lack of training data, fine-tuning might lead to over-fitting. Respectively, [56,195] the authors utilize short-time fourier transform (STFT) to change the fingerprint of a sound 1D signal to 2D, then employ the TL power of ResNet-v2 model to achieve satisfactory localization. In the previous study, the authors use the approach known as region-wise and point-wise weighting network (RaP-Net) to address IL situations by fine-tuning and training the parameters independently for region-wise weight and the base net. The authors of this paper [196] create a novel TL-based approach that combines samples from 15 independent WiFi RSS indoor location datasets in order to train a single convolutional neural network model that can identify patterns in the combined data. Comparing the suggested method to the benchmark model, the positioning error is reduced by up to 25%. In order to estimate a user’s position utilizing the WiFi’s CSI signal as a positioning feature, this research [40] suggests a federated transfer learning framework can reach a mean localization error of 42.18 cm in 64 location living room and the average model training time by roughly 34.78%. Also, TL with adversarial networks (TALNs) is a kind of ML approach that improves the performance of a target model in a new task by using pre-trained models. TALNs enable knowledge transfer from one job to another, minimizing the need for significant training and expediting the creation of new models. As compared to GANs, It generates new data that is similar to a given training set, whereas TALNs enhance current model performance in new tasks by transferring information from pre-trained models [197]. Table 9 gives a summary of different Fine-tuining paper for IL.
7.2. IL Based on Domain Adaptation
The process of taking a model that has already been trained on a source domain and adapting it to a different target domain is referred as domain adaptation by utilizing the knowledge and characteristics acquired in the source domain, this method is frequently employed in transfer learning to enhance the performance of models in the target domain. Exploiting pre-trained models and reducing the quantity of data required for training in the target domain, domain adaptation can save a substantial time and cost. Even when the features of the source and target domains differ, it can still aid in improving the model’s performance in the second domain. This kind of technique has some drawbacks, one of which is that it needs a source domain that is connected to the target domain. The performance of the model might not considerably increase if the source domain and the target domain are too dissimilar. Also, when the target domain has few data, domain adaptation can be difficult and can lead to over-fitting or poorly generalization. For example [215] the authors suggest a novel framework is built on vision transformer neural networks to address the difficulty of the heterogeneity of wireless transceivers across various cellphones used by consumers reduces the dependability and accuracy. Moreover , the authors [216] propose a system based on multi-head attention NN that can be robust to device heterogeneity and offers a 35% accuracy improvement. By using WiFi, Cui et al. [217] address the issue of transmitting knowledge from a source environment to a target environment. The approach entails three steps: learning a localization model, using deep neural networks, and training an adaptive target feature extractor using an adversarial learning technique. Chen et al. [218] propose a WiFi-based localization system that can localize users with less labeled data and find them if the environment changes through domain adaptation with cluster assumption. One technique namely; zero-shot learning (ZSL) is a novel approach that can predict the position of people without requiring explicit training data for each location. This technique has the potential to revolutionize the domain of IL by removing the need for labor-intensive and time-consuming data collecting processes [153].
The technique utilizes sensor data from various sources, such as WiFi, Bluetooth, and RFID, to capture the spatial relationships and patterns of movement within an indoor environment. By leveraging this data, the model can learn to recognize common features and landmarks that are shared across different indoor environments, enabling it to make precise location predictions for new, unseen locations. This approach provides a realistic solution for IL in cases when gathering training data for each site is neither possible or practicable. It has the potential to significantly reduce the cost and time necessary to develop IL systems. Zhang et al. [219] provide a semi-supervised WiFi domain adversarial graph convolutional network model and a supervised WiFi attention graph convolutional network for this study. The Figure 10 illustrated a framework combines different discrete signal fingerprints generated by several users, where a structure of associated fingerprint is designed by employing an adaptive graph representation. Table 10 resume different paper that using a domain adaptation for IL.
8. Challenges and Future Directions
After conducting a comprehensive literature review and analyzing various IL studies, several open challenges and unresolved problems have emerged in the field. In this section we discusses and discovers the current challenges and the future directions that IL can take.
8.1. Open Challenges
As seen in the previous sections, IL has huge potential uses such as ranging from improving navigation and asset monitoring in buildings to improving indoor mapping and emergency response. Nevertheless, plenty of issues must be addressed to develop an accurate and reliable IL systems due to general problems, such as (i) multi-path propagation, (ii) interference, (iii) restricted line-of-sight, (iv) structural barriers, (v) power constraints, and (vi) privacy concerns and standardization or specific issues related to the use of DL and DTL in IL systems.
For instance, while standardization can be considered is a solution to several IL problems, it is also an essential challenge for ensuring interoperability and compatibility between different devices and systems. Specifically, standardization of IL is complicated by the technical complexity and the existence of proprietary technologies. Additionally, standardizing a process can be costly, which dissuade companies from altering their current practices or creating new ones. Despite these issues, it is imperative to create standards that promote interoperability and compatibility between different IL systems. Future research and development can help address these issues such as 6G technology and make IL a dependable and accurate method [229].
The following key issues cause inaccuracies in detecting the precise position of a device or person. Multi-path propagation, interference, line-of-sight restrictions, and structural obstacles are among the difficulties Radio signal multi-path propagation is a common source of mistake in IL systems. Various types of electrical equipment can also obstruct reliable position tracking [126]. Indoor situations with restricted line-of-sight might make GPS signals even more difficult to reach the device or person. Walls, columns, and furniture can potentially create signal blocking and reflection, making interior localization operations more challenging. These difficulties must be solved in order to achieve precise and dependable IL [230].
Another issue is power restrictions, which can reduce the capability and accuracy of battery-powered devices. It is critical for the industry to develop inventive solutions to these problems and improve IL systems [231]. One of the big challenge is privacy and security: some people may be concerned about having their movements recorded and watched in a facility. It is critical for the industry to address these issues by creating transparent policies and safeguarding consumers’ privacy [232].
Financial implications (cost) of a new technology or modification to an existing system might deter businesses from adopting new IL technologies or updating current systems to adhere to a standard. The industry must look for low-cost solutions that will lower the obstacles to adoption. Overall, resolving these difficulties will enable the IL sector to fully exploit this technology and make it available to a wider range of applications [233].
Besides, rich location data that can be used to train indoor localization algorithms is large in quantity and privacy sensitive, which may lead to high network cost (i.e., data transmission cost, data storage cost) and potential privacy leakage for data transmission to the central server.
On the other hand, DL and DTL models often operate as black boxes, making it challenging to interpret and understand the reasoning behind their predictions. In the context of indoor localization, where accurate and explainable decisions are crucial, developing techniques to enhance the interpretability and explainability of DL models is an open research area. Additionally, FL and DTL models typically require substantial computational resources and power, making them unsuitable for resource-constrained devices or battery-powered sensors. Exploring techniques to reduce the computational complexity and energy requirements of DL models for indoor localization is an ongoing challenge.
8.2. Future Directions
By exploring the following future research directions, the field of IL can make significant progress in addressing the abovementioned challenges and limitations associated with IL technologies, and the use of DL and DTL in IL, ultimately leading to more effective and reliable indoor positioning systems.
- With the launch of 6G networks, IL is projected to become more precise and dependable. 6G is projected to provide faster data rates, lower latency, and greater positioning capabilities that may be used for IL. Real-time tracking of people and objects indoors will be possible, which will be beneficial in a variety of applications such as asset tracking, interior navigation, and security monitoring. This work [234] proposed a case study in a 6G scenario with a large number of devices and an AP where an euclidean distance on the quantum version is exploited to analyze the performance and explore new horizons in this field.
- Blockchain technology has the potential to create a safe and decentralized system for IL, hence increasing privacy and security. For example, a blockchain-based system may securely and transparently store location data, making it impossible for attackers to modify the data. This is especially beneficial in applications requiring sensitive location data, such as healthcare and banking. Baucas et al. [235] proposed a concept that integrates IL RSSI trilateration-based and blockchain technique by offering high privacy and security and providing accurate localisation. This topic still needs more investigation and improvement in term of performance and generalization.
- Virtual and augmented reality can give a more immersive and accessible alternative to engage with interior spaces. Users may navigate and explore interior areas more efficiently by combining VR/AR and IL. For example, a person wearing a VR headset can be steered to a specific area indoors, or an AR overlay can offer contextual information about the items around them. A digital twin is a virtual replica of a physical entity or place. IL systems may be simulated and optimized by constructing a digital twin of the area. A digital twin, for example, can be used to assess the performance of various positioning algorithms or sensor setups before deploying them in the actual world. The authors [236] proposed a real time system that provide critical information for evacuation such as time and short distance evacuation between the exit and the current position, virtual line by incorporated AR and building information modeling
- To tackle the energy efficiency challenge, exploring federated learning approaches can distribute the training process across multiple devices while preserving data privacy. Additionally, leveraging edge computing capabilities to perform on-device model inference can reduce the computational burden on resource-constrained devices and conserve energy. For example, Li et al. [237] present a distributed indoor positioning approach that integrates a centralized positioning method using pseudo-label (CRNP) and federated learning. The location data is stored on individual users’ devices, and the collaborative CRNP model is enhanced by consolidating users’ model updates. The experimental findings indicate that (i) leveraging unlabeled data collected from the crowd leads to enhanced accuracy in indoor localization using the proposed CRNP; (ii) the decentralized system, engineered to withstand varying data distributions, effectively reduces network expenses and safeguards user privacy.
- Enhancing the interpretability and explainability of DL models can be achieved by developing techniques that provide insights into the decision-making process. This can include methods for generating attention maps or visualizing the important features and factors influencing the localization predictions. For instance, the authos in [132] propose an explainable IL (EIL) method for higher precision and integrity in IPS is proposed by his research. The precise locations of BLE devices are predicted by the proposed localization method, which takes into consideration the RSSI. Typically, to achieve efficient localization, a method called recursive continuous Wavelet transform (R-CWT) is proposed, which extracts discriminative features from the beacon signals.
- Generative AI can be lead in the future for all disciplines to provide recommendations and suggestions that take into account consumers’ prior requests and use histories as well as the current scenario and real-time conditions [238]. In order to achieve this, IL and generative AI (for example ChatGPT) can combine to create a system that is very powerful and promising in terms of performance, quality response, and service by offering distinct experiences through the situation; for example, personalized tour guides in museums, shopping malls, recommended hospital, or rescues application by generating the best evacuation plan based on (temperature, wind direction, crowding area, etc.
Conclusion
This survey article investigated the numerous IL systems, methodologies, and strategies. According to our review of the literature, there are several ways and approaches for IL, such as RSSI-based methods, time-of-flight methods, magnetic field-based methods, and vision-based methods. Furthermore, our research has revealed that AI-based approaches, such as ML, DL, and, in particular, Transfer learning, are significantly being exploited for IL. These strategies have shown substantial increase in accuracy and promise in addressing some of the obstacles associated with previous procedures. Moreover, multi-modal and hybrid solutions that mix several technologies, such as WiFi and Bluetooth, and diverse algorithms, like AI, fingerprint, or ML, have showed promise for boosting IL accuracy and precision. In addition, this survey research investigated the significance of datasets and applications in the field of IL. The availability of high-quality datasets is vital for the development and assessment of IL systems. Moreover, IL has a wide range of applications, from interior navigation and asset monitoring to location-based advertising, customised consumer experiences, and rescues and evacuation planing. Lastly, the evaluation metrics for IL have been explored in this survey paper. Metrics such as mean error, root mean square error, accuracy, precision are commonly used to assess the performance system. Nonetheless, there is still a need for standardized assessment measures to permit more effective comparisons across different methodologies and technology.
Finally, this survey has offered an overview of the present status of IL, covering the many technologies, methodologies, and approaches employed, as well as their applications and assessment metrics. While there are still substantial problems and restrictions to overcome, the area of IL shows enormous potential for enhancing the efficiency and safety of numerous applications. Further research is needed to build such as exploiting digital twin, blockchain, 6G and generative AI.
Declaration of competing interest
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
Acknowledgments
This work was supported by the University of Dubai under the Internal Research Fund.
References
- Wen, Q.; Liang, Y.; Wu, C.; Tavares, A.; Han, X. Indoor localization algorithm based on artificial neural network and radio-frequency identification reference tags. Adv. Mech. Eng. 2018, 10, 1687814018808682. [Google Scholar] [CrossRef]
- Sertatıl, C.; Altınkaya, M.A.; Raoof, K. A novel acoustic indoor localization system employing CDMA. Digit. Signal Processing 2012, 22, 506–517. [Google Scholar] [CrossRef]
- Ashraf, I.; Kang, M.; Hur, S.; Park, Y. MINLOC: Magnetic field patterns-based indoor localization using convolutional neural networks. IEEE Access 2020, 8, 66213–66227. [Google Scholar] [CrossRef]
- Ouyang, G.; Abed-Meraim, K. A Survey of Magnetic-Field-Based Indoor Localization. Electronics 2022, 11, 864. [Google Scholar] [CrossRef]
- Morar, A.; Moldoveanu, A.; Mocanu, I.; Moldoveanu, F.; Radoi, I.E.; Asavei, V.; Gradinaru, A.; Butean, A. A comprehensive survey of indoor localization methods based on computer vision. Sensors 2020, 20, 2641. [Google Scholar] [CrossRef] [PubMed]
- Bibbò, L.; Carotenuto, R.; Della Corte, F. An Overview of Indoor Localization System for Human Activity Recognition (HAR) in Healthcare. Sensors 2022, 22, 8119. [Google Scholar] [CrossRef] [PubMed]
- Wyffels, J.; De Brabanter, J.; Crombez, P.; Verhoeve, P.; Nauwelaers, B.; De Strycker, L. Distributed, signal strength-based indoor localization algorithm for use in healthcare environments. IEEE J. Biomed. Health Inform. 2014, 18, 1887–1893. [Google Scholar] [CrossRef] [PubMed]
- Hesslein, N.; Wesselhöft, M.; Hinckeldeyn, J.; Kreutzfeldt, J. Industrial Indoor Localization: Improvement of Logistics Processes Using Location Based Services. Advances in Automotive Production Technology–Theory and Application: Stuttgart Conference on Automotive Production (SCAP2020). Springer, 2021, pp. 460–467.
- Carrasco, U.; Coronado, P.D.U.; Parto, M.; Kurfess, T. Indoor location service in support of a smart manufacturing facility. Comput. Ind. 2018, 103, 132–140. [Google Scholar] [CrossRef]
- Melamed, R. Indoor localization: Challenges and opportunities. Proceedings of the International Conference on Mobile Software Engineering and Systems, 2016, pp. 1–2.
- Ye, Q.; Fan, X.; Bie, H.; Puthal, D.; Wu, T.; Song, X.; Fang, G. SE-Loc: Security-enhanced indoor localization with semi-supervised deep learning. IEEE Trans. Netw. Sci. Eng. 2022. [Google Scholar] [CrossRef]
- Bradley, C.; El-Tawab, S.; Heydari, M.H. Security analysis of an IoT system used for indoor localization in healthcare facilities. 2018 Systems and Information Engineering Design Symposium (SIEDS). IEEE, 2018, pp. 147–152.
- Chawathe, S.S. Beacon placement for indoor localization using bluetooth. 2008 11th International IEEE Conference on Intelligent Transportation Systems. IEEE, 2008, pp. 980–985.
- Mayer, P.; Magno, M.; Benini, L. Self-sustaining Ultra-wideband Positioning System for Event-driven Indoor Localization. Arxiv Prepr. Arxiv:2212.04896 2022.
- Petrosino, A.; Striccoli, D.; Romanov, O.; Boggia, G.; Grieco, L.A. Light Fidelity for Internet of Things: A survey. Opt. Switch. Netw. 2023, 100732. [Google Scholar] [CrossRef]
- Braun, J.; Mendes, J.; Pereira, A.I.; Lima, J.; Costa, P. Object Detection for Indoor Localization System. Optimization, Learning Algorithms and Applications: Second International Conference, OL2A 2022, Póvoa de Varzim, Portugal, October 24-25, 2022, Proceedings. Springer, 2023, pp. 788–803. 24 October.
- Himeur, Y.; Elnour, M.; Fadli, F.; Meskin, N.; Petri, I.; Rezgui, Y.; Bensaali, F.; Amira, A. AI-big data analytics for building automation and management systems: A survey, actual challenges and future perspectives. Artif. Intell. Rev. 2022, 1–93. [Google Scholar] [CrossRef]
- Sulaiman, B.; Tarapiah, S.; Atalla, S.; Mansoor, W.; Himeur, Y. Radio map generation approaches for an RSSI-based indoor positioning system. Syst. Soft Comput. 2023, 200054. [Google Scholar] [CrossRef]
- Kheddar, H.; Himeur, Y.; Al-Maadeed, S.; Amira, A.; Bensaali, F. Deep Transfer Learning for Automatic Speech Recognition: Towards Better Generalization. Arxiv Prepr. Arxiv:2304.14535 2023.
- Himeur, Y.; Alsalemi, A.; Bensaali, F.; Amira, A.; Al-Kababji, A. Recent trends of smart nonintrusive load monitoring in buildings: A review, open challenges, and future directions. Int. J. Intell. Syst. 2022, 37, 7124–7179. [Google Scholar] [CrossRef]
- Kheddar, H.; Himeur, Y.; Awad, A.I. Deep Transfer Learning Applications in Intrusion Detection Systems: A Comprehensive Review. Arxiv Prepr. Arxiv:2304.10550 2023.
- Li, P.; Cui, H.; Khan, A.; Raza, U.; Piechocki, R.; Doufexi, A.; Farnham, T. Deep transfer learning for WiFi localization. 2021 IEEE Radar Conference (RadarConf21). IEEE, 2021, pp. 1–5.
- Himeur, Y.; Elnour, M.; Fadli, F.; Meskin, N.; Petri, I.; Rezgui, Y.; Bensaali, F.; Amira, A. Next-generation energy systems for sustainable smart cities: Roles of transfer learning. Sustain. Cities Soc. 2022, 104059. [Google Scholar] [CrossRef]
- Himeur, Y.; Ghanem, K.; Alsalemi, A.; Bensaali, F.; Amira, A. Artificial intelligence based anomaly detection of energy consumption in buildings: A review, current trends and new perspectives. Applied Energy 2021, 287, 116601. [Google Scholar] [CrossRef]
- Himeur, Y.; Al-Maadeed, S.; Kheddar, H.; Al-Maadeed, N.; Abualsaud, K.; Mohamed, A.; Khattab, T. Video surveillance using deep transfer learning and deep domain adaptation: Towards better generalization. Eng. Appl. Artif. Intell. 2023, 119, 105698. [Google Scholar] [CrossRef]
- Sayed, A.N.; Himeur, Y.; Bensaali, F. From time-series to 2D images for building occupancy prediction using deep transfer learning. Eng. Appl. Artif. Intell. 2023, 119, 105786. [Google Scholar] [CrossRef]
- Copiaco, A.; Himeur, Y.; Amira, A.; Mansoor, W.; Fadli, F.; Atalla, S.; Sohail, S.S. An innovative deep anomaly detection of building energy consumption using energy time-series images. Eng. Appl. Artif. Intell. 2023, 119, 105775. [Google Scholar] [CrossRef]
- Sayed, A.N.; Himeur, Y.; Bensaali, F. Deep and transfer learning for building occupancy detection: A review and comparative analysis. Eng. Appl. Artif. Intell. 2022, 115, 105254. [Google Scholar] [CrossRef]
- Himeur, Y.; Al-Maadeed, S.; Varlamis, I.; Al-Maadeed, N.; Abualsaud, K.; Mohamed, A. Face mask detection in smart cities using deep and transfer learning: Lessons learned from the COVID-19 pandemic. Systems 2023, 11, 107. [Google Scholar] [CrossRef]
- Xiao, J.; Zhou, Z.; Yi, Y.; Ni, L.M. A survey on wireless indoor localization from the device perspective. Acm Comput. Surv. (Csur) 2016, 49, 1–31. [Google Scholar] [CrossRef]
- Himeur, Y.; Al-Maadeed, S.; Almadeed, N.; Abualsaud, K.; Mohamed, A.; Khattab, T.; Elharrouss, O. Deep visual social distancing monitoring to combat COVID-19: A comprehensive survey. Sustain. Cities Soc. 2022, 104064. [Google Scholar] [CrossRef]
- Konstantinidis, A.; Chatzimilioudis, G.; Zeinalipour-Yazti, D.; Mpeis, P.; Pelekis, N.; Theodoridis, Y. Privacy-preserving indoor localization on smartphones. IEEE Trans. Knowl. Data Eng. 2015, 27, 3042–3055. [Google Scholar] [CrossRef]
- Yan, Q.; Liu, X.; Deng, X.; Peng, W.; Zhang, G. Markov chain Monte Carlo based energy use behaviors prediction of office occupants. Algorithms 2020, 13, 21. [Google Scholar] [CrossRef]
- Kröger, J. Unexpected inferences from sensor data: A hidden privacy threat in the internet of things. Internet of Things. Information Processing in an Increasingly Connected World: First IFIP International Cross-Domain Conference, IFIPIoT 2018, Held at the 24th IFIP World Computer Congress, WCC 2018, Poznan, Poland, September 18-19, 2018, Revised Selected Papers 1. Springer, 2019, pp. 147–159. 18 September.
- Järvinen, K.; Leppäkoski, H.; Lohan, E.S.; Richter, P.; Schneider, T.; Tkachenko, O.; Yang, Z. PILOT: Practical privacy-preserving indoor localization using outsourcing. 2019 IEEE European Symposium on Security and Privacy (EuroS&P). IEEE, 2019, pp. 448–463.
- Chen, Y.; Li, G.; Tan, Y.; Zhang, G. Graph-Based Radio Fingerprint Augmentation for Deep Learning-Based Indoor Localization. Ieee Sens. J. 2023. [Google Scholar] [CrossRef]
- Li, Q.; Cao, R.; Zhu, J.; Fu, H.; Zhou, B.; Fang, X.; Jia, S.; Zhang, S.; Liu, K.; Li, Q. Learn then match: A fast coarse-to-fine depth image-based indoor localization framework for dark environments via deep learning and keypoint-based geometry alignment. ISPRS J. Photogramm. Remote Sens. 2023, 195, 169–177. [Google Scholar] [CrossRef]
- AlHajri, M.I.; Shubair, R.M.; Chafii, M. Indoor localization under limited measurements: A cross-environment joint semi-supervised and transfer learning approach. 2021 IEEE 22nd International Workshop on Signal Processing Advances in Wireless Communications (SPAWC). IEEE, 2021, pp. 266–270.
- Njima, W.; Bazzi, A.; Chafii, M. DNN-Based Indoor Localization Under Limited Dataset Using GANs and Semi-Supervised Learning. IEEE Access 2022, 10, 69896–69909. [Google Scholar] [CrossRef]
- Guo, J.; Ho, I.W.H.; Hou, Y.; Li, Z. FedPos: A Federated Transfer Learning Framework for CSI-Based Wi-Fi Indoor Positioning. Ieee Syst. J. 2023. [Google Scholar] [CrossRef]
- Sayed, A.N.; Bensaali, F.; Himeur, Y.; Houchati, M. Edge-Based Real-Time Occupancy Detection System through a Non-Intrusive Sensing System. Energies 2023, 16, 2388. [Google Scholar] [CrossRef]
- Li, X.; Bi, D.; Peng, L.; Xie, Y. Kernel-based online prediction algorithms for indoor localization in Internet of Things. Expert Syst. Appl. 2023, 119547. [Google Scholar] [CrossRef]
- Bousbiat, H.; Himeur, Y.; Varlamis, I.; Bensaali, F.; Amira, A. Neural Load Disaggregation: Meta-Analysis, Federated Learning and Beyond. Energies 2023, 16, 991. [Google Scholar] [CrossRef]
- Nessa, A.; Adhikari, B.; Hussain, F.; Fernando, X.N. A Survey of Machine Learning for Indoor Positioning. IEEE Access 2020, 8, 214945–214965. [Google Scholar] [CrossRef]
- Zafari, F.; Gkelias, A.; Leung, K.K. A survey of indoor localization systems and technologies. Ieee Commun. Surv. & Tutor. 2019, 21, 2568–2599. [Google Scholar]
- Mostafa, S.; Harras, K.; Youssef, M. A Survey of Indoor Localization Systems in Multi-Floor Environments 2022.
- Ji, T.; Li, W.; Zhu, X.; Liu, M. Survey on indoor fingerprint localization for BLE. 2022 IEEE 6th Information Technology and Mechatronics Engineering Conference (ITOEC). IEEE, 2022, Vol. 6, pp. 129–134.
- Jang, B.; Kim, H.; wook Kim, J. Survey of Landmark-based Indoor Positioning Technologies. Information Fusion 2022. [Google Scholar] [CrossRef]
- Motroni, A.; Buffi, A.; Nepa, P. A Survey on Indoor Vehicle Localization Through RFID Technology. IEEE Access 2021, 9, 17921–17942. [Google Scholar] [CrossRef]
- Guo, X.; Ansari, N.; Hu, F.; Shao, Y.; Elikplim, N.R.; Li, L. A Survey on Fusion-Based Indoor Positioning. Ieee Commun. Surv. Tutor. 2020, 22, 566–594. [Google Scholar] [CrossRef]
- Liang, Q.; Liu, M. An Automatic Site Survey Approach for Indoor Localization Using a Smartphone. IEEE Trans. Autom. Sci. Eng. 2020, 17, 191–206. [Google Scholar] [CrossRef]
- Singh, N.; Choe, S.; Punmiya, R. Machine Learning Based Indoor Localization Using Wi-Fi RSSI Fingerprints: An Overview. IEEE Access 2021, 9, 127150–127174. [Google Scholar] [CrossRef]
- Yaro, A.S.; Maly, F.; Prazak, P. A Survey of the Performance-Limiting Factors of a 2-Dimensional RSS Fingerprinting-Based Indoor Wireless Localization System. Sensors 2023, 23, 2545. [Google Scholar] [CrossRef]
- Feng, X.; Nguyen, K.A.; Luo, Z. A survey of deep learning approaches for WiFi-based indoor positioning. J. Inf. Telecommun. 2022, 6, 163–216. [Google Scholar] [CrossRef]
- Jeong, M.; Choi, S.W.; Kim, S. A tutorial on Federated Learning methodology for indoor localization with non-IID fingerprint databases. ICT Express 2023. [Google Scholar] [CrossRef]
- Parmar, S.; Wang, X.; Yang, C.; Mao, S. Voice Fingerprinting for Indoor Localization with a Single Microphone Array and Deep Learning; Association for Computing Machinery: New York, NY, USA, 2022. [Google Scholar] [CrossRef]
- Ye, Q.; Fan, X.; Bie, H.; Puthal, D.; Wu, T.; Song, X.; Fang, G. SE-Loc: Security-Enhanced Indoor Localization with Semi-Supervised Deep Learning. IEEE Trans. Netw. Sci. Eng. 2022 pp.1-1. [Google Scholar] [CrossRef]
- Djosic, S.; Stojanovic, I.; Jovanovic, M.; Nikolic, T.; Djordjevic, G.L. Fingerprinting-assisted UWB-based localization technique for complex indoor environments. Expert Syst. Appl. 2021, 167, 114188. [Google Scholar] [CrossRef]
- A. Abdullah, M. A. Abdullah, M. Haris, O. A. Aziz, R. A. Rashid, A. S. Abdullah, UTMInDualSymFi: A Dataset of Dual-bandWi-Fi RSSI Data in Symmetric Indoor Environments (Oct. 2022). [CrossRef]
- N. Dvorecki, O. N. Dvorecki, O. Bar-Shalom, L. Banin, Y. Amizur, Intel open wi-fi rtt dataset (2020). [CrossRef]
- A. M. Rajab, B.Wang, An indoor radio map localization based wifi access points fingerprints datasets. (2021). [CrossRef]
- Baronti, P.; Barsocchi, P.; Chessa, S.; Mavilia, F.; Palumbo, F. Indoor Bluetooth Low Energy Dataset for Localization, Tracking, Occupancy, and Social Interaction. Sensors 2018, 18. [Google Scholar] [CrossRef]
- P. Spachos, Rssi dataset for indoor localization fingerprinting (2020). [CrossRef]
- Saeedi, S.; Carvalho, E.D.; Li, W.; Tzoumanikas, D.; Leutenegger, S.; Kelly, P.H.; Davison, A.J. Characterizing visual localization and mapping datasets. 2019 International Conference on Robotics and Automation (ICRA). IEEE, 2019, pp. 6699–6705.
- Liu, Y.; Gao, W.; Hu, Z. A large-scale dataset for indoor visual localization with high-precision ground truth. Int. J. Robot. Res. 2022, 41, 129–135. [Google Scholar] [CrossRef]
- P. Taddei, C. Sanchez, D. Lymberopoulos, V. Sequeira, Microsoft Indoor Localization Competition 2018 Dataset (Apr. 2018). [CrossRef]
- Herath, S.; Caruso, D.; Liu, C.; Chen, Y.; Furukawa, Y. Neural Inertial Localization. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2022, pp. 6604–6613.
- S. De Bast, S. Pollin, Ultra dense indoor mamimo csi dataset (2021). [CrossRef]
- Hanley, D.; Faustino, A.B.; Zelman, S.D.; Degenhardt, D.A.; Bretl, T. MagPIE: A dataset for indoor positioning with magnetic anomalies. 2017 International Conference on Indoor Positioning and Indoor Navigation (IPIN), 2017, pp. 1–8. [CrossRef]
- Khassanov, Y.; Nurpeiissov, M.; Sarkytbayev, A.; Kuzdeuov, A.; Varol, H.A. Finer-level Sequential WiFi-based Indoor Localization. 2021 IEEE/SICE International Symposium on System Integration (SII). IEEE, 2021, pp. 163–169.
- I. Sarris, S. Papaharalabos, M. Mahlig, T. Merk, D. Kalogiros, P. Karlsson, Y. Kopsinis, T. Siozos, A. Koutris, A. Pikrakis, Ble ray-tracing simulation dataset (Feb. 2022). [CrossRef]
- Acharya, D.; KHOSHELHAM, K.; WINTER, S. Unimelb Corridor Synthetic dataset 2019. [CrossRef]
- Moghtadaiee, V.; Ghorashi, S.A.; Ghavami, M. New Reconstructed Database for Cost Reduction in Indoor Fingerprinting Localization. IEEE Access 2019, 7, 104462–104477. [Google Scholar] [CrossRef]
- V. Moghtadaiee, S. A. Ghorashi, M. Ghavami, New reconstructed database for cost reduction in indoor fingerprinting localization, IEEE Access 7 (2019) 104462–104477. [CrossRef]
- Shu, Y.; Xu, Q.; Liu, J.; Choudhury, R.R.; Trigoni, N.; Bahl, V. Indoor Location Competition 2.0 Dataset, 2021.
- Bi, J.; Wang, Y.; Yu, B.; Cao, H.; Shi, T.; Huang, L. Supplementary open dataset for WiFi indoor localization based on received signal strength. Satellite Navigation 2022, 3, 1–15. [Google Scholar] [CrossRef]
- Giuliano, R.; Cardarilli, G.C.; Cesarini, C.; Di Nunzio, L.; Fallucchi, F.; Fazzolari, R.; Mazzenga, F.; Re, M.; Vizzarri, A. Indoor Localization System Based on Bluetooth Low Energy for Museum Applications. Electronics 2020, 9. [Google Scholar] [CrossRef]
- Santoro, L.; Nardello, M.; Fontanelli, D.; Brunelli, D.; Petri, D. Scalable centimetric tracking system for team sports. 2022 IEEE International Workshop on Sport, Technology and Research (STAR), 2022, pp. 1–6. [CrossRef]
- Paolini, G.; Masotti, D.; Antoniazzi, F.; Salmon Cinotti, T.; Costanzo, A. Fall Detection and 3-D Indoor Localization by a Custom RFID Reader Embedded in a Smart e-Health Platform. IEEE Trans. Microw. Theory Tech. 2019, 67, 5329–5339. [Google Scholar] [CrossRef]
- Bai, L.; Ciravegna, F.; Bond, R.; Mulvenna, M. A Low Cost Indoor Positioning System Using Bluetooth Low Energy. IEEE Access 2020, 8, 136858–136871. [Google Scholar] [CrossRef]
- Patel, N.; Choromanska, A.; Krishnamurthy, P.; Khorrami, F. A deep learning gated architecture for UGV navigation robust to sensor failures. Robot. Auton. Syst. 2019, 116, 80–97. [Google Scholar] [CrossRef]
- Szyc, K.; Nikodem, M.; Zdunek, M. Bluetooth low energy indoor localization for large industrial areas and limited infrastructure. Ad Hoc Netw. 2023, 139, 103024. [Google Scholar] [CrossRef]
- Lei, J.; Huang, J.; Kong, L.; Chen, G.; Khan, M.K. DeFLoc: Deep Learning Assisted Indoor Vehicle Localization Atop FM Fingerprint Map. IEEE Trans. Intell. Transp. Syst. 2022, 23, 19795–19806. [Google Scholar] [CrossRef]
- Lee, S.; Kim, H.; Lee, B. An Efficient Rescue System with Online Multi-Agent SLAM Framework. Sensors 2020, 20. [Google Scholar] [CrossRef]
- Kachurka, V.; Rault, B.; Ireta Muñoz, F.I.; Roussel, D.; Bonardi, F.; Didier, J.Y.; Hadj-Abdelkader, H.; Bouchafa, S.; Alliez, P.; Robin, M. WeCo-SLAM: Wearable Cooperative SLAM System for Real-Time Indoor Localization Under Challenging Conditions. Ieee Sens. J. 2022, 22, 5122–5132. [Google Scholar] [CrossRef]
- Hashem, O.; Youssef, M.; Harras, K.A. WiNar: RTT-based Sub-meter Indoor Localization using Commercial Devices. 2020 IEEE Int. Conf. Pervasive Comput. Commun. (Percom) 2020, null, 1–10. [Google Scholar] [CrossRef]
- Banin, L.; Bar-Shalom, O.; Dvorecki, N.; Amizur, Y. Scalable Wi-Fi Client Self-Positioning Using Cooperative FTM-Sensors. IEEE Trans. Instrum. Meas. 2019, 68, 3686–3698. [Google Scholar] [CrossRef]
- Yu, Y.; Chen, R.; Chen, L.; Xu, S.; Li, W.; Wu, Y.; Zhou, H. Precise 3-D Indoor Localization Based on Wi-Fi FTM and Built-In Sensors. IEEE Internet Things J. 2020, 7, 11753–11765. [Google Scholar] [CrossRef]
- Shao, W.; Luo, H.; Zhao, F.; Tian, H.; Yan, S.; Crivello, A. Accurate Indoor Positioning Using Temporal–Spatial Constraints Based on Wi-Fi Fine Time Measurements. IEEE Internet Things J. 2020, 7, 11006–11019. [Google Scholar] [CrossRef]
- Ibrahim, M.; Liu, H.; Jawahar, M.; Nguyen, V.; Gruteser, M.; Howard, R.; Yu, B.; Bai, F. Verification: Accuracy Evaluation of WiFi Fine Time Measurements on an Open Platform. Proc. 24th Annu. Int. Conf. Mob. Comput. Netw. 2018, null. [Google Scholar] [CrossRef]
- Kolakowski, M. Automated Calibration of RSS Fingerprinting Based Systems Using a Mobile Robot and Machine Learning. Sensors 2021, 21. [Google Scholar] [CrossRef]
- Yang, X.; Wu, Z.; Zhang, Q. Bluetooth Indoor Localization With Gaussian–Bernoulli Restricted Boltzmann Machine Plus Liquid State Machine. IEEE Trans. Instrum. Meas. 2022, 71, 1–8. [Google Scholar] [CrossRef]
- Herath, S.; Irandoust, S.; Chen, B.; Qian, Y.; Kim, P.; Furukawa, Y. Fusion-DHL: WiFi, IMU, and Floorplan Fusion for Dense History of Locations in Indoor Environments. 2021 IEEE International Conference on Robotics and Automation (ICRA), 2021, pp. 5677–5683. [CrossRef]
- Feasibility of LoRa for Smart Home Indoor Localization. Appl. Sci. 2021, 11, 415. [CrossRef]
- Li, J.; Bi, Y.; Li, K.; Wang, K.; Lin, F.; Chen, B.M. Accurate 3D Localization for MAV Swarms by UWB and IMU Fusion, 2018. [CrossRef]
- Stocker, M.; Großwindhager, B.; Boano, C.A.; Römer, K. SnapLoc: An Ultra-Fast UWB-Based Indoor Localization System for an Unlimited Number of Tags: Demo Abstract. Proceedings of the 18th International Conference on Information Processing in Sensor Networks; Association for Computing Machinery: New York, NY, USA, 2019. [Google Scholar] [CrossRef]
- Macoir, N.; Bauwens, J.; Jooris, B.; Van Herbruggen, B.; Rossey, J.; Hoebeke, J.; De Poorter, E. UWB Localization with Battery-Powered Wireless Backbone for Drone-Based Inventory Management. Sensors 2019, 19. [Google Scholar] [CrossRef]
- Xu, Y.; Shmaliy, Y.S.; Ahn, C.K.; Shen, T.; Zhuang, Y. Tightly Coupled Integration of INS and UWB Using Fixed-Lag Extended UFIR Smoothing for Quadrotor Localization. IEEE Internet Things J. 2021, 8, 1716–1727. [Google Scholar] [CrossRef]
- Su, D.; Wang, X.; Liu, S.; Ding, W. Four-Dimensional Indoor Visible Light Positioning: A Deep-Learning-Based Perspective. J. Frankl. Inst. 2023. [Google Scholar] [CrossRef]
- Majeed, K.; Hranilovic, S. Passive Indoor Visible Light Positioning System Using Deep Learning. IEEE Internet Things J. 2021, 8, 14810–14821. [Google Scholar] [CrossRef]
- Arfaoui, M.A.; Soltani, M.D.; Tavakkolnia, I.; Ghrayeb, A.; Assi, C.M.; Safari, M.; Haas, H. Invoking Deep Learning for Joint Estimation of Indoor LiFi User Position and Orientation. IEEE J. Sel. Areas Commun. 2021, 39, 2890–2905. [Google Scholar] [CrossRef]
- Xu, B.; Jia, N.; Wang, Z. Indoor Acoustic Localization with IMU for UGV. 2022 9th International Forum on Electrical Engineering and Automation (IFEEA), 2022, pp. 568–572. [CrossRef]
- Cao, S.; Chen, X.; Zhang, X.; Chen, X. Effective Audio Signal Arrival Time Detection Algorithm for Realization of Robust Acoustic Indoor Positioning. IEEE Trans. Instrum. Meas. 2020, 69, 7341–7352. [Google Scholar] [CrossRef]
- Cao, S.; Chen, X.; Zhang, X.; Chen, X. Improving the Tracking Accuracy of TDMA-Based Acoustic Indoor Positioning Systems Using a Novel Error Correction Method. Ieee Sens. J. 2022, 22, 5427–5436. [Google Scholar] [CrossRef]
- Xu, S.; Chen, R.; Guo, G.; Li, Z.; Qian, L.; Ye, F.; Liu, Z.; Huang, L. Bluetooth, Floor-Plan, and Microelectromechanical Systems-Assisted Wide-Area Audio Indoor Localization System: Apply to Smartphones. IEEE Trans. Ind. Electron. 2022, 69, 11744–11754. [Google Scholar] [CrossRef]
- Chiou, M.J.; Liu, Z.; Yin, Y.; Liu, A.A.; Zimmermann, R. Zero-Shot Multi-View Indoor Localization via Graph Location Networks. Proceedings of the 28th ACM International Conference on Multimedia, 2020, pp. 3431–3440.
- Liu, Z.; Cheng, L.; Liu, A.; Zhang, L.; He, X.; Zimmermann, R. Multiview and Multimodal Pervasive Indoor Localization. Proceedings of the 25th ACM International Conference on Multimedia; Association for Computing Machinery: New York, NY, USA, 2017; MM ’17, p. 109–117. [Google Scholar] [CrossRef]
- Zimmerman, N.; Guadagnino, T.; Chen, X.; Behley, J.; Stachniss, C. Long-Term Localization Using Semantic Cues in Floor Plan Maps. IEEE Robot. Autom. Lett. 2023, 8, 176–183. [Google Scholar] [CrossRef]
- Choi, J. Sensor-Aided Learning for Wi-Fi Positioning with Beacon Channel State Information. IEEE Trans. Wirel. Commun. 2020, PP, 1–1. [Google Scholar] [CrossRef]
- Liu, Z.; Chen, L.; Zhou, X.; Jiao, Z.; Guo, G.; Chen, R. Machine Learning for Time-of-Arrival Estimation with 5G Signals in Indoor Positioning. IEEE Internet Things J. 2023, pp. 1–1. [CrossRef]
- Pan, G.; Wang, T.; Zhang, S.; Xu, S. High Accurate Time-of-Arrival Estimation With Fine-Grained Feature Generation for Internet-of-Things Applications. Ieee Wirel. Commun. Lett. 2020, 9, 1980–1984. [Google Scholar] [CrossRef]
- Ni, D.; Postolache, O.A.; Mi, C.; Zhong, M.; Wang, Y. UWB Indoor Positioning Application Based on Kalman Filter and 3-D TOA Localization Algorithm. 2019 11th International Symposium on Advanced Topics in Electrical Engineering (ATEE), 2019, pp. 1–6. [CrossRef]
- Pala, S.; Jayan, S.; Kurup, D.G. An accurate UWB based localization system using modified leading edge detection algorithm. Ad Hoc Netw. 2020, 97, 102017. [Google Scholar] [CrossRef]
- Obeidat, H.A.; Ahmad, I.; Rawashdeh, M.R.; Abdullah, A.A.; Shuaieb, W.S.; Obeidat, O.A.; Abdallhameed, R.A. Enhanced TOA Estimation Using OFDM over Wide-Band Transmission Based on a Simulated Model. Wirel. Pers. Commun. 2022, 123, 3449–3461, Cited by: 2. [Google Scholar] [CrossRef]
- Stahlke, M.; Kram, S.; Ott, F.; Feigl, T.; Mutschler, C. Estimating TOA Reliability With Variational Autoencoders. Ieee Sens. J. 2022, 22, 5133–5140. [Google Scholar] [CrossRef]
- Liu, Z.; Chen, R.; Ye, F.; Guo, G.; Li, Z.; Qian, L. Improved TOA Estimation Method for Acoustic Ranging in a Reverberant Environment. Ieee Sens. J. 2022, 22, 4844–4852. [Google Scholar] [CrossRef]
- Liu, J.; Wang, T.; Li, Y.; Li, C.; Wang, Y.; Shen, Y. A Transformer-Based Signal Denoising Network for AoA Estimation in NLoS Environments. Ieee Commun. Lett. 2022, 26, 2336–2339. [Google Scholar] [CrossRef]
- Koutris, A.; Siozos, T.; Kopsinis, Y.; Pikrakis, A.; Merk, T.; Mahlig, M.; Papaharalabos, S.; Karlsson, P. Deep Learning-Based Indoor Localization Using Multi-View BLE Signal. Sensors 2022, 22. [Google Scholar] [CrossRef]
- Cengiz, K. Comprehensive Analysis on Least-Squares Lateration for Indoor Positioning Systems. IEEE Internet Things J. 2021, 8, 2842–2856. [Google Scholar] [CrossRef]
- Kim, Y.; Kyung, Y.; Ko, H. Indoor Localization System with PDR and WiFi Complementary Integration. 2022 13th International Conference on Information and Communication Technology Convergence (ICTC), 2022, pp. 1674–1676. [CrossRef]
- Hai, L.; Yang, Z.; Cao, Z.; Yaug, M. An improved weighted centroid localization algorithm based on Zigbee. 2022 5th International Conference on Advanced Electronic Materials, Computers and Software Engineering (AEMCSE), 2022, pp. 634–637. [CrossRef]
- Abdelraouf, A.; Ashour, M.; Hammad, H.F.; Elshabrawy, T. The Study of Perpendicular Distance Approach Based on RSSI for Indoor Localization. 2019 International Conference on Innovative Trends in Computer Engineering (ITCE), 2019, pp. 208–213. [CrossRef]
- Niculescu, D.; Nath, B. Ad hoc positioning system (APS). GLOBECOM’01. IEEE Global Telecommunications Conference (Cat. No.01CH37270), 2001, Vol. 5, pp. 2926–2931 vol.5. [CrossRef]
- Mendoza-Silva, G.M.; Costa, A.C.; Torres-Sospedra, J.; Painho, M.; Huerta, J. Environment-Aware Regression for Indoor Localization Based on WiFi Fingerprinting. Ieee Sens. J. 2022, 22, 4978–4988. [Google Scholar] [CrossRef]
- Liu, Z.; Xiong, J.; Ma, Y.; Liu, Y. Scene recognition for device-free indoor localization. Ieee Sens. J. 2023, pp. 1-1. [CrossRef]
- Swargam, B.K.; Yadav, R.N.; Chaturvedi, M. Two Level Wi-Fi Fingerprinting Based Indoor Localization Using Machine Learning. Proceedings of the 24th International Conference on Distributed Computing and Networking; Association for Computing Machinery: New York, NY, USA, 2023; ICDCN ’23, p. 324–329. [Google Scholar] [CrossRef]
- Yuan, Y.; Liu, X.; Liu, Z.; He, Z.; Xu, Z. Indoor Localization With Wireless Heterogeneous Devices by Composite Fingerprint Sets and Hybrid Classification. IEEE Trans. Veh. Technol. 2022, 71, 12117–12127. [Google Scholar] [CrossRef]
- Koçoğlu, F.Ö. Research on the success of unsupervised learning algorithms in indoor location prediction. Int. Adv. Res. Eng. J. 2022, 6, 148–153. [Google Scholar] [CrossRef]
- Jaenal, A.; Moreno, F.A.; Gonzalez-Jimenez, J. Unsupervised Appearance Map Abstraction for Indoor Visual Place Recognition With Mobile Robots. IEEE Robot. Autom. Lett. 2022, 7, 8495–8501. [Google Scholar] [CrossRef]
- Zong, X.; Liu, A.; Wang, C.; Ye, Z.; Du, J. Indoor evacuation model based on visual-guidance artificial bee colony algorithm. Building Simulation. Springer, 2022, Vol. 15, pp. 645–658.
- AlHajri, M.I.; Ali, N.T.; Shubair, R.M. Indoor Localization for IoT Using Adaptive Feature Selection: A Cascaded Machine Learning Approach. IEEE Antennas Wirel. Propag. Lett. 2019, 18, 2306–2310. [Google Scholar] [CrossRef]
- Explainable indoor localization of BLE devices through RSSI using recursive continuous wavelet transformation and XGBoost classifier. Future Gener. Comput. Syst. 2023, 141, 230–242. [CrossRef]
- Mallik, M.; Das, S.; Chowdhury, C. Rank Based Iterative Clustering (RBIC) for indoor localization. Eng. Appl. Artif. Intell. 2023, 121, 106061. [Google Scholar] [CrossRef]
- Poulose, A.; Han, D.S. UWB Indoor Localization Using Deep Learning LSTM Networks. Applied Sciences 2020, 10. [Google Scholar] [CrossRef]
- Wu, W.; Shen, L.; Zhao, Z.; Li, M.; Huang, G.Q. Industrial IoT and Long Short-Term Memory Network-Enabled Genetic Indoor-Tracking for Factory Logistics. IEEE Trans. Ind. Inform. 2022, 18, 7537–7548. [Google Scholar] [CrossRef]
- Ngamakeur, K.; Yongchareon, S.; Yu, J.; Islam, S. Passive infrared sensor dataset and deep learning models for device-free indoor localization and tracking. Pervasive Mob. Comput. 2022, 88, 101721. [Google Scholar] [CrossRef]
- Liu, K.; Zhang, H.; Ng, J.K.Y.; Xia, Y.; Feng, L.; Lee, V.C.S.; Son, S.H. Toward Low-Overhead Fingerprint-Based Indoor Localization via Transfer Learning: Design, Implementation, and Evaluation. IEEE Trans. Ind. Inform. 2018, 14, 898–908. [Google Scholar] [CrossRef]
- Salimibeni, M.; Mohammadi, A. Hybrid Indoor Localization via Reinforcement Learning-based Information Fusion, 2022. [CrossRef]
- Wu, Z.; Wu, X.; Long, Y. Multi-Level Federated Graph Learning and Self-Attention Based Personalized Wi-Fi Indoor Fingerprint Localization. Ieee Commun. Lett. 2022, 26, 1794–1798. [Google Scholar] [CrossRef]
- Kim, M. Graph-Based Machine Learning for Practical Indoor Localization. Ieee Sens. Lett. 2022, 6, 1–4. [Google Scholar] [CrossRef]
- Luo, X.; Meratnia, N. A Geometric Deep Learning Framework for Accurate Indoor Localization. 2022 IEEE 12th International Conference on Indoor Positioning and Indoor Navigation (IPIN), 2022, pp. 1–8. [CrossRef]
- Aburaed, N.; Atalla, S.; Mukhtar, H.; Al-Saad, M.; Mansoor, W. Scaled Conjugate Gradient Neural Network for Optimizing Indoor Positioning System. 2019 International Symposium on Networks, Computers and Communications (ISNCC), 2019, pp. 1–4. [CrossRef]
- Ezzati Khatab, Z.; Hajihoseini Gazestani, A.; Ghorashi, S.A.; Ghavami, M. A fingerprint technique for indoor localization using autoencoder based semi-supervised deep extreme learning machine. Signal Processing 2021, 181, 107915. [Google Scholar] [CrossRef]
- Alitaleshi, A.; Jazayeriy, H.; Kazemitabar, J. EA-CNN: A smart indoor 3D positioning scheme based on Wi-Fi fingerprinting and deep learning. Eng. Appl. Artif. Intell. 2023, 117, 105509. [Google Scholar] [CrossRef]
- Hoang, M.T.; Yuen, B.; Dong, X.; Lu, T.; Westendorp, R.; Reddy, K. Recurrent Neural Networks for Accurate RSSI Indoor Localization. IEEE Internet Things J. 2019, 6, 10639–10651. [Google Scholar] [CrossRef]
- Kumar, R.; Singh, S.; Chaurasiya, V.K. A Low-Cost and Efficient Spatial–Temporal Model for Indoor Localization “H-LSTMF”. Ieee Sens. J. 2023, 23, 6117–6128. [Google Scholar] [CrossRef]
- Herath, S.; Yan, H.; Furukawa, Y. Ronin: Robust neural inertial navigation in the wild: Benchmark, evaluations, & new methods. 2020 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2020, pp. 3146–3152.
- Min, M.; Yang, S.; Li, S.; Zhang, H.; Xiao, L.; Pan, M.; Han, Z. Safe Reinforcement Learning-based Indoor 3D Location Privacy Protection. 2022 IEEE/CIC International Conference on Communications in China (ICCC), 2022, pp. 53–58. [CrossRef]
- Li, Y.; Hu, X.; Zhuang, Y.; Gao, Z.; Zhang, P.; El-Sheimy, N. Deep Reinforcement Learning (DRL): Another Perspective for Unsupervised Wireless Localization. IEEE Internet Things J. 2020, 7, 6279–6287. [Google Scholar] [CrossRef]
- Carrera Villacrés, J.L.; Zhao, Z.; Braun, T.; Li, Z. A Particle Filter-Based Reinforcement Learning Approach for Reliable Wireless Indoor Positioning. IEEE J. Sel. Areas Commun. 2019, 37, 2457–2473. [Google Scholar] [CrossRef]
- Hajiakhondi-Meybodi, Z.; Hou, M.; Mohammadi, A. JUNO: Jump-Start Reinforcement Learning-based Node Selection for UWB Indoor Localization. GLOBECOM 2022 - 2022 IEEE Global Communications Conference, 2022, pp. 6194–6199. [CrossRef]
- Lezama, F.; González, G.G.; Larroca, F.; Capdehourat, G. Indoor Localization using Graph Neural Networks. 2021 IEEE URUCON, 2021, pp. 51–54. [CrossRef]
- Chen, B.J.; Chang, R.Y. Few-Shot Transfer Learning for Device-Free Fingerprinting Indoor Localization. ICC 2022 - IEEE International Conference on Communications, 2022, pp. 4631–4636. [CrossRef]
- Fu, Y.; Xiong, X.; Liu, Z.; Chen, X.; Liu, Y.; Fu, Z. A GNN-based indoor localization method using mobile RFID platform. 2022 7th International Conference on Smart and Sustainable Technologies (SpliTech), 2022, pp. 1–6. [CrossRef]
- Cao, Z.; Wang, S.; Sun, D.; Zhang, Y.; Feng, Y.; Jiang, S. ITAR: A Method for Indoor RFID Trajectory Automatic Recovery. Collaborative Computing: Networking, Applications and Worksharing; Gao, H., Wang, X., Wei, W., Dagiuklas, T., Eds.; Springer Nature Switzerland: Cham, 2022; pp. 400–418. [Google Scholar]
- Cai, Y.; Li, L.; Wang, D.; Li, X.; Liu, X. HTMatch: An efficient hybrid transformer based graph neural network for local feature matching. Signal Processing 2023, 204, 108859. [Google Scholar] [CrossRef]
- Liu, Y.; Li, H.; Xiao, J.; Jin, H. FLoc: Fingerprint-Based Indoor Localization System under a Federated Learning Updating Framework. 2019 15th International Conference on Mobile Ad-Hoc and Sensor Networks (MSN), 2019, pp. 113–118. [CrossRef]
- Wu, P.; Imbiriba, T.; Park, J.; Kim, S.; Closas, P. Personalized Federated Learning over non-IID Data for Indoor Localization. 2021 IEEE 22nd International Workshop on Signal Processing Advances in Wireless Communications (SPAWC), 2021, pp. 421–425. [CrossRef]
- Park, J.; Moon, J.; Kim, T.; Wu, P.; Imbiriba, T.; Closas, P.; Kim, S. Federated Learning for Indoor Localization via Model Reliability With Dropout. Ieee Commun. Lett. 2022, 26, 1553–1557. [Google Scholar] [CrossRef]
- Gal, Y.; Ghahramani, Z. Dropout as a bayesian approximation: Representing model uncertainty in deep learning. international conference on machine learning. PMLR, 2016, pp. 1050–1059.
- Xiao, P.; Cheng, S.; Stankovic, V.; Vukobratovic, D. Averaging is probably not the optimum way of aggregating parameters in federated learning. Entropy 2020, 22, 314. [Google Scholar] [CrossRef]
- Li, Q.; Diao, Y.; Chen, Q.; He, B. Federated learning on non-iid data silos: An experimental study. 2022 IEEE 38th International Conference on Data Engineering (ICDE). IEEE, 2022, pp. 965–978.
- Nagia, N.; Rahman, M.T.; Valaee, S. Federated Learning for WiFi Fingerprinting. ICC 2022-IEEE International Conference on Communications. IEEE, 2022, pp. 4968–4973.
- Wei, W.; Yan, J.; Wu, X.; Wang, C.; Zhang, G. A Meta-Learning Approach for Device-Free Indoor Localization. Ieee Commun. Lett. [CrossRef]
- Foliadis, A.; Garcia, M.H.C.; Stirling-Gallacher, R.A.; Thomä, R.S. Multi-Environment based Meta-Learning with CSI Fingerprints for Radio Based Positioning, 2022. [CrossRef]
- Ruan, Y.; Chen, L.; Zhou, X.; Guo, G.; Chen, R. Hi-Loc: Hybrid Indoor Localization via Enhanced 5G NR CSI. IEEE Trans. Instrum. Meas. 2022, 71, 1–15. [Google Scholar] [CrossRef]
- Nkabiti, K.P.; Chen, Y. Application of Solely Self-Attention Mechanism in CSI-Fingerprinting-Based Indoor Localization. Neural Comput. Appl. 2021, 33, 9185–9198. [Google Scholar] [CrossRef]
- Fan, S.; Wu, Y.; Han, C.; Wang, X. SIABR: A Structured Intra-Attention Bidirectional Recurrent Deep Learning Method for Ultra-Accurate Terahertz Indoor Localization. IEEE J. Sel. Areas Commun. 2021, 39, 2226–2240. [Google Scholar] [CrossRef]
- Luo, J.; Zhang, C.; Wang, C. Indoor Multi-Floor 3D Target Tracking Based on the Multi-Sensor Fusion. IEEE Access 2020, 8, 36836–36846. [Google Scholar] [CrossRef]
- Yu, J.; Wang, P.; Koike-Akino, T.; Orlik, P.V. Multi-Modal Recurrent Fusion for Indoor Localization. ICASSP 2022 - 2022 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), 2022, pp. 5083–5087. [CrossRef]
- Njima, W.; Chafii, M.; Chorti, A.; Shubair, R.M.; Poor, H.V. Indoor Localization Using Data Augmentation via Selective Generative Adversarial Networks. IEEE Access 2021, 9, 98337–98347. [Google Scholar] [CrossRef]
- Yu, H.; Mooney, M. Characterizing the as-encountered ground condition with tunnel boring machine data using semi-supervised learning. Comput. Geotech. 2023, 154, 105159. [Google Scholar] [CrossRef]
- Abhishek. ; Yadav, R.K.; Verma, S. Semi-supervised learning with dropouts. Expert Syst. Appl. 2023, 215, 119235. [Google Scholar] [CrossRef]
- Rana, M.; Rahman, A.; Smith, D. A Semi-supervised Approach for Activity Recognition from Indoor Trajectory Data, 2023. [CrossRef]
- He, T.; Niu, Q.; Liu, N. GC-Loc: A Graph Attention Based Framework for Collaborative Indoor Localization Using Infrastructure-Free Signals. Proc. Acm Interact. Mob. Wearable Ubiquitous Technol. 2023, 6. [Google Scholar] [CrossRef]
- Zhang, B.; Sifaou, H.; Li, G.Y. CSI-fingerprinting Indoor Localization via Attention-Augmented Residual Convolutional Neural Network. IEEE Trans. Wirel. Commun. 2023, pp. 1–1. [CrossRef]
- Min, Z.; Khosravan, N.; Bessinger, Z.; Narayana, M.; Kang, S.B.; Dunn, E.; Boyadzhiev, I. LASER: LAtent SpacE Rendering for 2D Visual Localization, 2022. [CrossRef]
- Cruz, S.; Hutchcroft, W.; Li, Y.; Khosravan, N.; Boyadzhiev, I.; Kang, S.B. Zillow Indoor Dataset: Annotated Floor Plans With 360deg Panoramas and 3D Room Layouts. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2021, pp. 2133–2143.
- Zheng, J.; Zhang, J.; Li, J.; Tang, R.; Gao, S.; Zhou, Z. Structured3D: A Large Photo-realistic Dataset for Structured 3D Modeling. 2019, abs/1908.00222, [1908.00222].
- Nabati, M.; Navidan, H.; Shahbazian, R.; Ghorashi, S.A.; Windridge, D. Using Synthetic Data to Enhance the Accuracy of Fingerprint-Based Localization: A Deep Learning Approach. Ieee Sens. Lett. 2020, 4, 1–4. [Google Scholar] [CrossRef]
- .
- Poulose, A.; Han, D.S. Hybrid Deep Learning Model Based Indoor Positioning Using Wi-Fi RSSI Heat Maps for Autonomous Applications. Electronics 2021, 10. [Google Scholar] [CrossRef]
- Salimibeni, M.; Hajiakhondi-Meybodi, Z.; Malekzadeh, P.; Atashi, M.; Plataniotis, K.N.; Mohammadi, A. IoT-TD: IoT Dataset for Multiple Model BLE-based Indoor Localization/Tracking. 2020 28th European Signal Processing Conference (EUSIPCO), 2021, pp. 1697–1701. [CrossRef]
- Bracco, A.; Grunwald, F.; Navcevich, A.; Capdehourat, G.; Larroca, F. Museum Accessibility Through Wi-Fi Indoor Positioning. CoRR, 2008. [Google Scholar]
- Torres-Sospedra, J.; Montoliu, R.; Martínez-Usó, A.; Avariento, J.P.; Arnau, T.J.; Benedito-Bordonau, M.; Huerta, J. UJIIndoorLoc: A new multi-building and multi-floor database for WLAN fingerprint-based indoor localization problems. 2014 International Conference on Indoor Positioning and Indoor Navigation (IPIN), 2014, pp. 261–270. [CrossRef]
- Abbas, M.; Elhamshary, M.; Rizk, H.; Torki, M.; Youssef, M. WiDeep: WiFi-based Accurate and Robust Indoor Localization System using Deep Learning. 2019 IEEE International Conference on Pervasive Computing and Communications (PerCom, 2019, pp. 1–10. [CrossRef]
- Rizk, H.; Abbas, M.; Youssef, M. Device-independent cellular-based indoor location tracking using deep learning. Pervasive Mob. Comput. 2021, 75, 101420. [Google Scholar] [CrossRef]
- Talla-Chumpitaz, R.; Castillo-Cara, M.; Orozco-Barbosa, L.; García-Castro, R. A novel deep learning approach using blurring image techniques for Bluetooth-based indoor localisation. Information Fusion 2023, 91, 173–186. [Google Scholar] [CrossRef]
- M. Castillo-Cara, Bluetooth indoor localization dataset (Mar. 2022). [CrossRef]
- Acharya, D.; Singha Roy, S.; Khoshelham, K.; Winter, S. A Recurrent Deep Network for Estimating the Pose of Real Indoor Images from Synthetic Image Sequences. Sensors 2020, 20. [Google Scholar] [CrossRef] [PubMed]
- Arnold, M.; Schaich, F. Indoor positioning systems: Smart fusion of a variety of sensor readings. 2021 IEEE 22nd International Workshop on Signal Processing Advances in Wireless Communications (SPAWC). IEEE, 2021, pp. 1–5.
- Chen, M.; Liu, K.; Ma, J.; Zeng, X.; Dong, Z.; Tong, G.; Liu, C. MoLoc: Unsupervised Fingerprint Roaming for Device-Free Indoor Localization in a Mobile Ship Environment. IEEE Internet Things J. 2020, 7, 11851–11862. [Google Scholar] [CrossRef]
- Huang, H.; Lin, B.; Feng, L.; Lv, H. Hybrid indoor localization scheme with image sensor-based visible light positioning and pedestrian dead reckoning. Applied Optics 2019. [Google Scholar] [CrossRef] [PubMed]
- Yu, Y.; Chen, R.; Chen, L.; Li, W.; Wu, Y.; Zhou, H. H-WPS: Hybrid Wireless Positioning System Using an Enhanced Wi-Fi FTM/RSSI/MEMS Sensors Integration Approach. IEEE Internet Things J. 2022, 9, 11827–11842. [Google Scholar] [CrossRef]
- Li, D.; Miao, J.; Shi, X.; Tian, Y.; Long, Q.; Cai, T.; Guo, P.; Yu, H.; Yang, W.; Yue, H.; Wei, Q.; Qiao, F. RaP-Net: A Region-wise and Point-wise Weighting Network to Extract Robust Features for Indoor Localization. 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2021, pp. 1331–1338. [CrossRef]
- Klus, R.; Klus, L.; Talvitie, J.; Pihlajasalo, J.; Torres-Sospedra, J.; Valkama, M. Transfer learning for convolutional indoor positioning systems. 2021 International Conference on Indoor Positioning and Indoor Navigation (IPIN). IEEE, 2021, pp. 1–8.
- Lee, S.; Yang, H.; Choi, H.; Seong, W. Zero-Shot Single-Microphone Sound Classification and Localization in a Building Via the Synthesis of Unseen Features. IEEE Trans. Multimed. 2022, 24, 2339–2351. [Google Scholar] [CrossRef]
- Stahlke, M.; Feigl, T.; García, M.H.C.; Stirling-Gallacher, R.A.; Seitz, J.; Mutschler, C. Transfer Learning to adapt 5G AI-based Fingerprint Localization across Environments. 2022 IEEE 95th Vehicular Technology Conference: (VTC2022-Spring), 2022, pp. 1–5. [CrossRef]
- Park, J.; Nam, S.; Choi, H.; Ko, Y.; Ko, Y.B. Improving Deep Learning-Based UWB LOS/NLOS Identification with Transfer Learning: An Empirical Approach. Electronics 2020, 9. [Google Scholar] [CrossRef]
- Sun, Z.; Wang, K.; Sun, R.; Chen, Z. Channel State Identification in Complex Indoor Environments With ST-CNN and Transfer Learning. Ieee Commun. Lett. 2023, 27, 546–550. [Google Scholar] [CrossRef]
- Stocker, M.; Gallacher, M.; Boano, C.; Römer, K. Performance of Support Vector Regression in Correcting UWB Ranging Measurements under LOS/NLOS Conditions. CPS-IoTBench 2021 - Proceedings of the 2021 Benchmarking Cyber-Physical Systems and Internet of Things. Association of Computing Machinery, 2021, pp. 6–11. [CrossRef]
- Huang, J.; Si, H.; Guo, X.; Zhong, K. Co-Occurrence Fingerprint Data-Based Heterogeneous Transfer Learning Framework for Indoor Positioning. Sensors 2022, 22. [Google Scholar] [CrossRef]
- G. M. Mendoza-Silva, P. G. M. Mendoza-Silva, P. Richter, J. Torres-Sospedra, E. S. Lohan, J. Huerta, Long-Term Wi-Fi fingerprinting dataset and supporting material, Germán M. Mendoza-Silva gratefully acknowledges funding from grant PREDOC/2016/55 by Universitat Jaume I. (Nov. 2017). [CrossRef]
- Xiang, C.; Zhang, S.; Xu, S.; Mao, G. Crowdsourcing-Based Indoor Localization With Knowledge-Aided Fingerprint Transfer. Ieee Sens. J. 2022, 22, 4281–4293. [Google Scholar] [CrossRef]
- Xiang, C.; Zhang, S.; Xu, S.; Alexandropoulos, G.C. Self-Calibrating Indoor Localization with Crowdsourcing Fingerprints and Transfer Learning. ICC 2021 - IEEE International Conference on Communications, 2021, pp. 1–6. [CrossRef]
- Adamkiewicz, K.; Koch, P.; Morawska, B.; Lipiński, P.; Lichy, K.; Leplawy, M. Improving UWB Indoor Localization Accuracy Using Sparse Fingerprinting and Transfer Learning. Computational Science – ICCS 2021; Paszynski, M., Kranzlmüller, D., Krzhizhanovskaya, V.V., Dongarra, J.J., Sloot, P.M.A., Eds.; Springer International Publishing: Cham, 2021; pp. 291–302. [Google Scholar]
- Morawska, B.; Lipinski, P.; Lichy, K.; Adamkiewicz, K. Transfer learning-based UWB indoor localization using MHT-MDC and clusterization-based sparse fingerprinting. J. Comput. Sci. 2022, 61, 101654. [Google Scholar] [CrossRef]
- Li, L.; Guo, X.; Zhang, Y.; Ansari, N.; Li, H. Long Short-Term Indoor Positioning System via Evolving Knowledge Transfer. IEEE Trans. Wirel. Commun. 2022, 21, 5556–5572. [Google Scholar] [CrossRef]
- Mendoza-Silva, G.M.; Richter, P.; Torres-Sospedra, J.; Lohan, E.S.; Huerta, J. Long-Term WiFi Fingerprinting Dataset for Research on Robust Indoor Positioning. Data 2018, 3. [Google Scholar] [CrossRef]
- Khan, D.; Ho, I.W.H. CrossCount: Efficient Device-Free Crowd Counting by Leveraging Transfer Learning. IEEE Internet Things J. 2023, 10, 4049–4058. [Google Scholar] [CrossRef]
- Deng, L. The MNIST Database of Handwritten Digit Images for Machine Learning Research [Best of the Web]. Ieee Signal Processing Mag. 2012, 29, 141–142. [Google Scholar] [CrossRef]
- Maghdid, H.S.; Ghafoor, K.Z.; Al-Talabani, A.; Sadiq, A.S.; Singh, P.K.; Rawat, D.B. Enabling accurate indoor localization for different platforms for smart cities using a transfer learning algorithm. Internet Technol. Lett. 2022, 5, e200. [Google Scholar] [CrossRef]
- Long, K.; Shen, C.; Tian, C.; Zhang, K. Fuzzy Weighted Localization System based on Transfer Learning. 2022 2nd International Conference on Computer Science, Electronic Information Engineering and Intelligent Control Technology (CEI), 2022, pp. 646–649. [CrossRef]
- Zhang, Y.; Wu, C.; Chen, Y. A Low-Overhead Indoor Positioning System Using CSI Fingerprint Based on Transfer Learning. Ieee Sens. J. 2021, 21, 18156–18165. [Google Scholar] [CrossRef]
- Gufran, D.; Tiku, S.; Pasricha, S. VITAL: Vision Transformer Neural Networks for Accurate Smartphone Heterogeneity Resilient Indoor Localization. Arxiv Prepr. Arxiv:2302.09443 2023.
- Tiku, S.; Gufran, D.; Pasricha, S. Multi-head attention neural network for smartphone invariant indoor localization. 2022 IEEE 12th International Conference on Indoor Positioning and Indoor Navigation (IPIN). IEEE, 2022, pp. 1–8.
- Cui, W.; Zhang, L.; Li, B.; Chen, Z.; Wu, M.; Li, X.; Kang, J. Semi-Supervised Deep Adversarial Forest for Cross-Environment Localization. IEEE Trans. Veh. Technol. 2022, 71, 10215–10219. [Google Scholar] [CrossRef]
- Chen, X.; Li, H.; Zhou, C.; Liu, X.; Wu, D.; Dudek, G. Fidora: Robust WiFi-Based Indoor Localization via Unsupervised Domain Adaptation. IEEE Internet Things J. 2022, 9, 9872–9888. [Google Scholar] [CrossRef]
- Zhang, M.; Fan, Z.; Shibasaki, R.; Song, X. Domain adversarial graph convolutional network based on rssi and crowdsensing for indoor localization. Arxiv Prepr. Arxiv:2204.05184 2022.
- Xiao, J.; Li, H.; Jin, H. Transtrack: Online meta-transfer learning and Otsu segmentation enabled wireless gesture tracking. Pattern Recognition 2022, 121, 108157. [Google Scholar] [CrossRef]
- Li, Q.; Cao, R.; Zhu, J.; Hou, X.; Liu, J.; Jia, S.; Li, Q.; Qiu, G. Improving synthetic 3D model-aided indoor image localization via domain adaptation. ISPRS J. Photogramm. Remote Sens. 2022, 183, 66–78. [Google Scholar] [CrossRef]
- Li, L.; Guo, X.; Zhao, M.; Li, H.; Ansari, N. TransLoc: A Heterogeneous Knowledge Transfer Framework for Fingerprint-Based Indoor Localization. IEEE Trans. Wirel. Commun. 2021, 20, 3628–3642. [Google Scholar] [CrossRef]
- Li, Z.; Rao, X. Toward Long-Term Effective and Robust Device-Free Indoor Localization via Channel State Information. IEEE Internet Things J. 2022, 9, 3599–3611. [Google Scholar] [CrossRef]
- Wang, G.; Abbasi, A.; Liu, H. WiFi-based Environment Adaptive Positioning with Transferable Fingerprint Features. 2021 IEEE 11th Annual Computing and Communication Workshop and Conference (CCWC), 2021, pp. 0123–0128. [CrossRef]
- Tian, Y.; Wang, J.; Zhao, Z. Wi-Fi Fingerprint Update for Indoor Localization via Domain Adaptation. 2021 IEEE 27th International Conference on Parallel and Distributed Systems (ICPADS), 2021, pp. 835–842. [CrossRef]
- Wang, L.; Shao, Y.; Guo, X. An Adaptive Localization Approach Based on Deep Adaptation Networks. 2019 International Conference on Control, Automation and Information Sciences (ICCAIS), 2019, pp. 1–5. [CrossRef]
- G. M. Mendoza-Silva, P. G. M. Mendoza-Silva, P. Richter, J. Torres-Sospedra, E. S. Lohan, J. Huerta, Long-TermWi-Fi fingerprinting dataset and supporting material (Nov. 2018). [CrossRef]
- Long, K.; Zheng, C.; Zhang, K.; Tian, C.; Shen, C. The Adaptive Fingerprint Localization in Dynamic Environment. Ieee Sens. J. 2022, 22, 13562–13580. [Google Scholar] [CrossRef]
- Zhang, M.; Fan, Z.; Shibasaki, R.; Song, X. Domain adversarial graph convolutional network based on rssi and crowdsensing for indoor localization. IEEE Internet Things J. 2023. [Google Scholar] [CrossRef]
- Zhang, G.; Zhang, D.; He, Y.; Chen, J.; Zhou, F.; Chen, Y. Multi-person passive wifi indoor localization with intelligent reflecting surface. IEEE Trans. Wirel. Commun. 2023. [Google Scholar] [CrossRef]
- Retscher, G. Indoor Navigation—User Requirements, State-of-the-Art and Developments for Smartphone Localization. Geomatics 2023, 3, 1–46. [Google Scholar] [CrossRef]
- Zhang, K.; Tan, B.; Ding, S.; Li, Y.; Li, G. Device-free indoor localization based on sparse coding with nonconvex regularization and adaptive relaxation localization criteria. Int. J. Mach. Learn. Cybern. 2023, 14, 429–443. [Google Scholar] [CrossRef]
- Gao, F.; Ma, J. Indoor Location Technology with High Accuracy Using Simple Visual Tags. Sensors 2023, 23, 1597. [Google Scholar] [CrossRef] [PubMed]
- Urgelles, H.; Picazo-Martínez, P.; Monserrat, J.F. Application of Quantum Computing to Accurate Positioning in 6G Indoor Scenarios. ICC 2022 - IEEE International Conference on Communications, 2022, pp. 643–647. [CrossRef]
- Baucas, M.J.; Gadsden, S.A.; Spachos, P. IoT-Based Smart Home Device Monitor Using Private Blockchain Technology and Localization. Ieee Netw. Lett. 2021, 3, 52–55. [Google Scholar] [CrossRef]
- Kanangkaew, S.; Jokkaw, N.; Tongthong, T. A real-time fire evacuation system based on the integration of Building Information Modeling and Augmented Reality. J. Build. Eng. 2023, 67, 105883. [Google Scholar] [CrossRef]
- Li, W.; Zhang, C.; Tanaka, Y. Pseudo label-driven federated learning-based decentralized indoor localization via mobile crowdsourcing. Ieee Sens. J. 2020, 20, 11556–11565. [Google Scholar] [CrossRef]
- Sohail, S.S.; Farhat, F.; Himeur, Y.; Nadeem, M.; Madsen, D.Ø.; Singh, Y.; Atalla, S.; Mansoor, W. The Future of GPT: A Taxonomy of Existing ChatGPT Research, Current Challenges, and Possible Future Directions. Curr. Chall. Possible Future Dir. (April 8 2023) 2023.
Figure 1.
Statistics of DL-based IL articles published between 2019 and 2023.
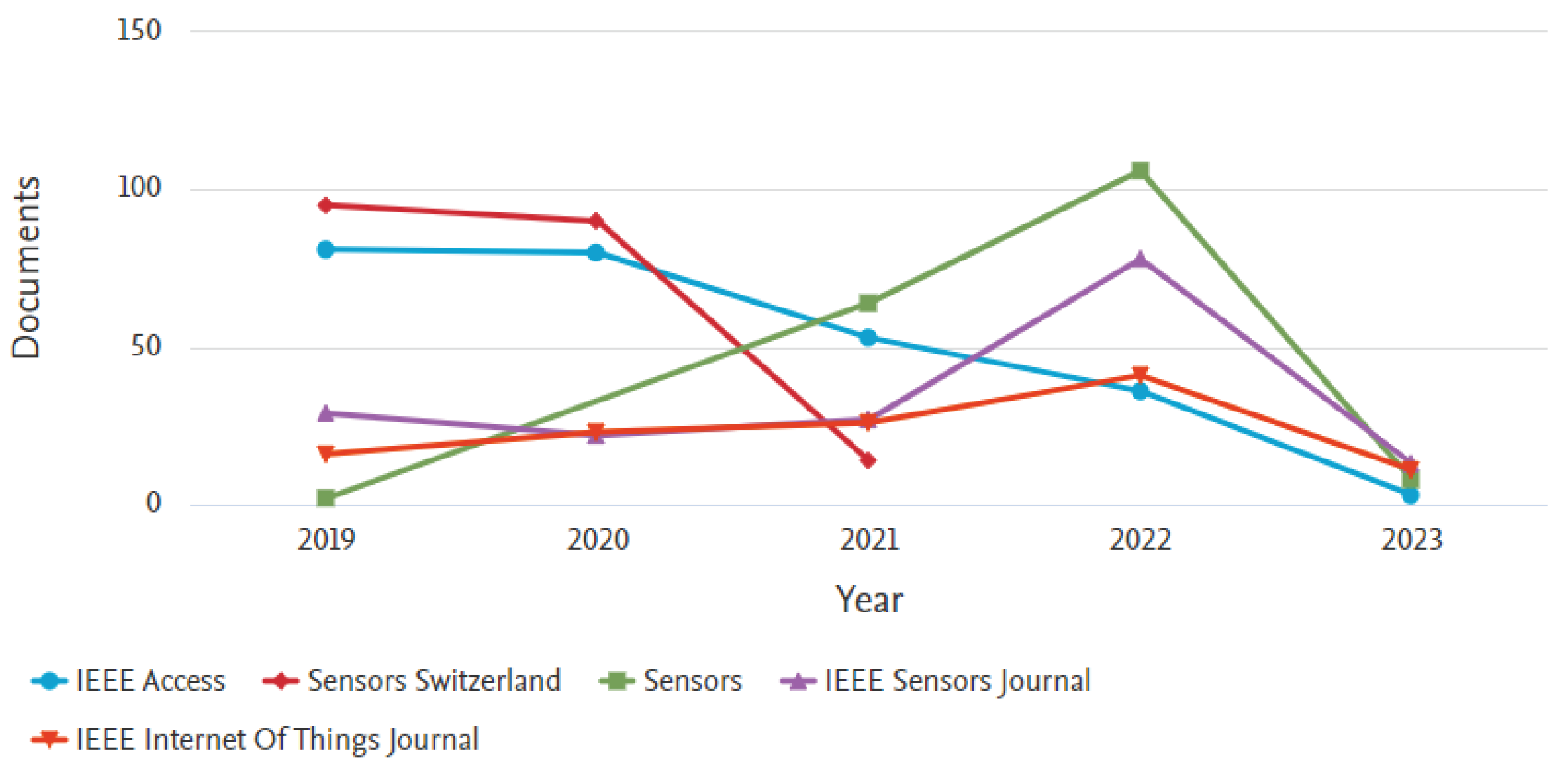
Figure 2.
Scopus documents type partition from 2019 to 2023
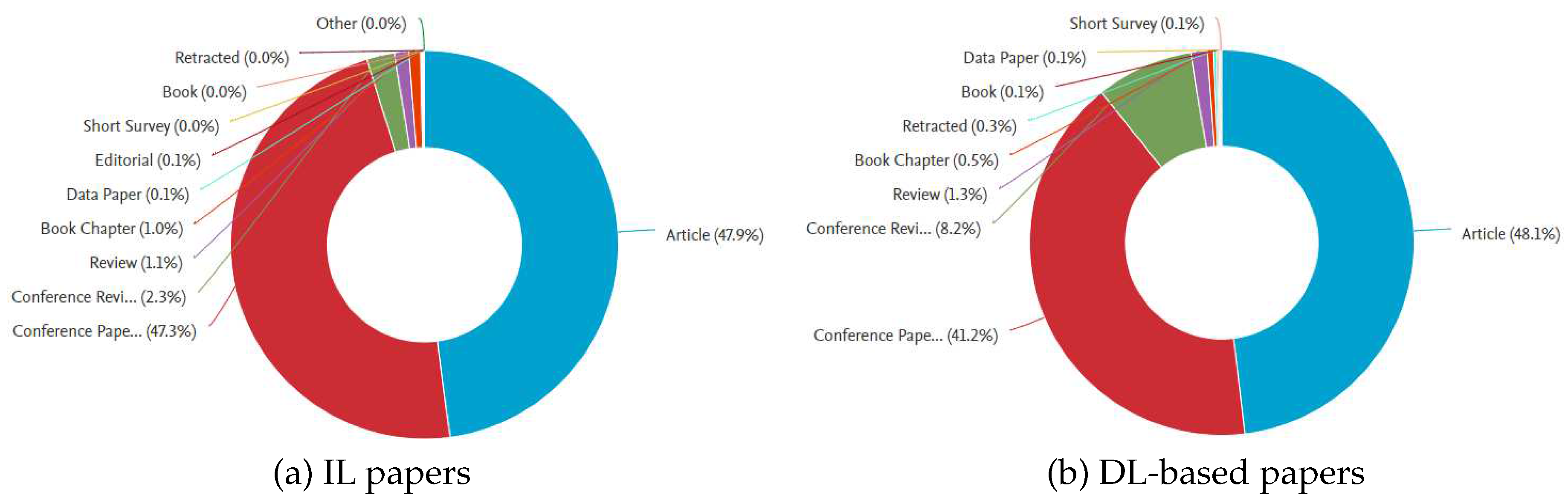
Figure 3.
IL concept and methods
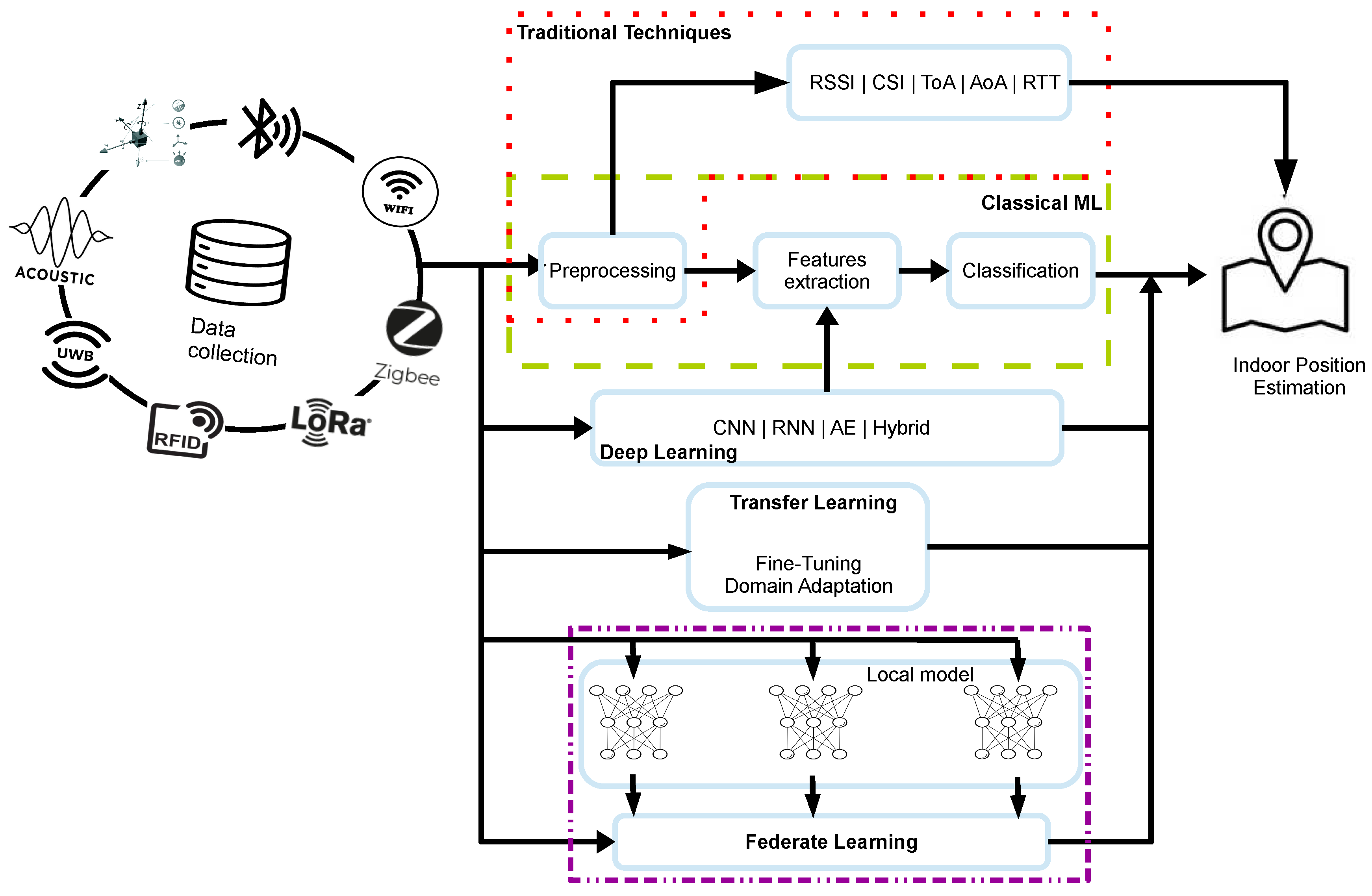
Figure 4.
IL Taxonomy
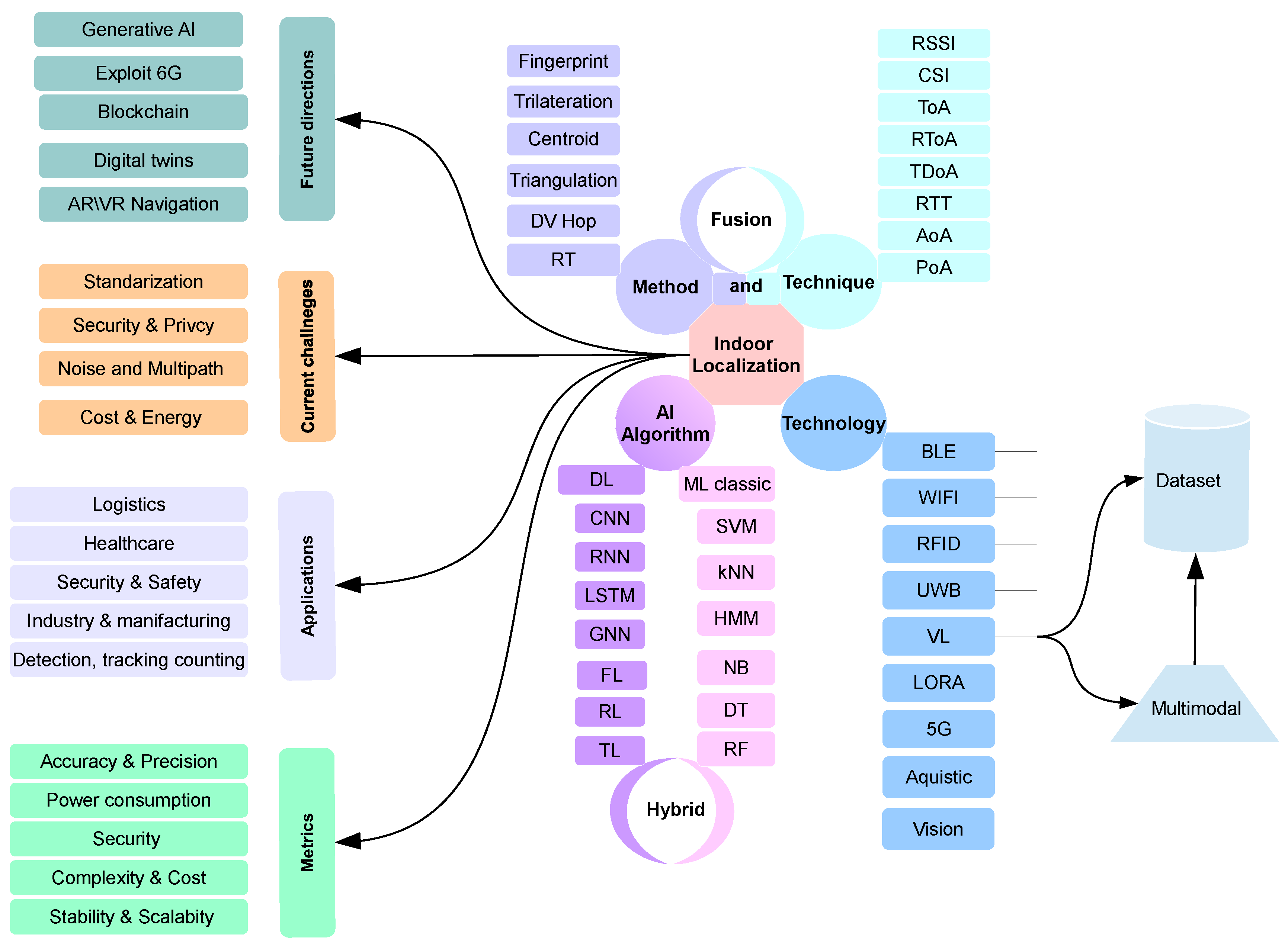
Figure 5.
Overview RTT-based technique [86].
Figure 5.
Overview RTT-based technique [86].
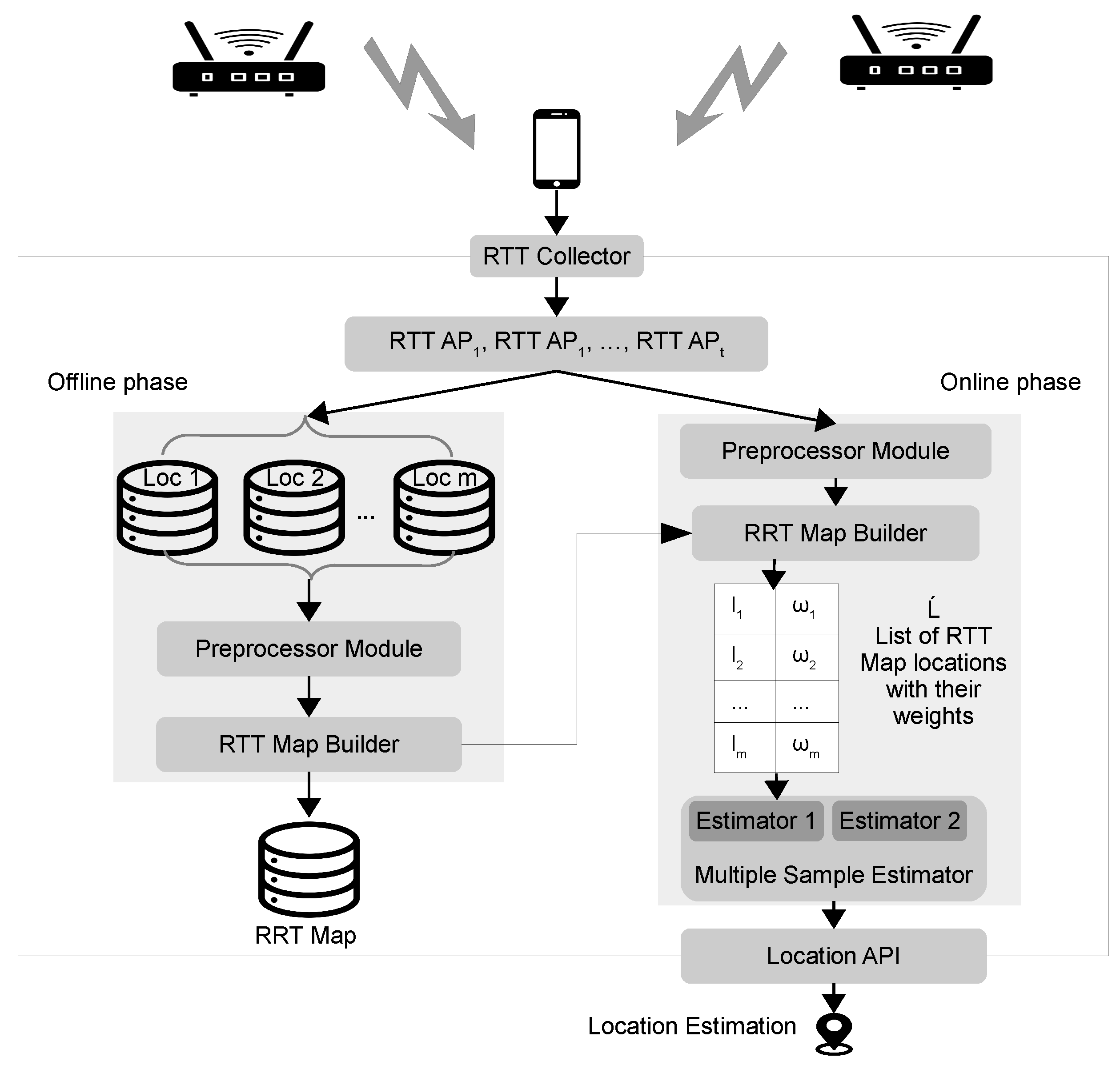
Figure 6.
An overview of the fingerprint algorithm method [55].
Figure 6.
An overview of the fingerprint algorithm method [55].
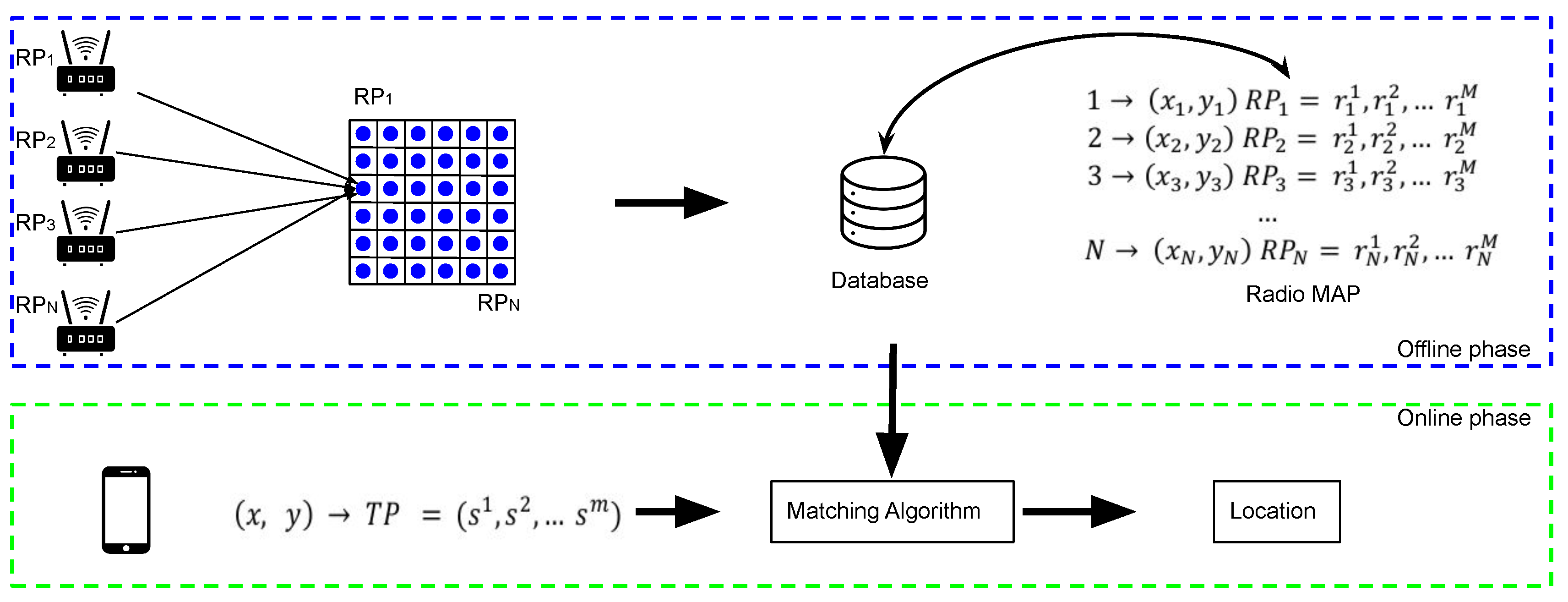
Figure 7.
Framework using reinforcement learning [151].
Figure 7.
Framework using reinforcement learning [151].
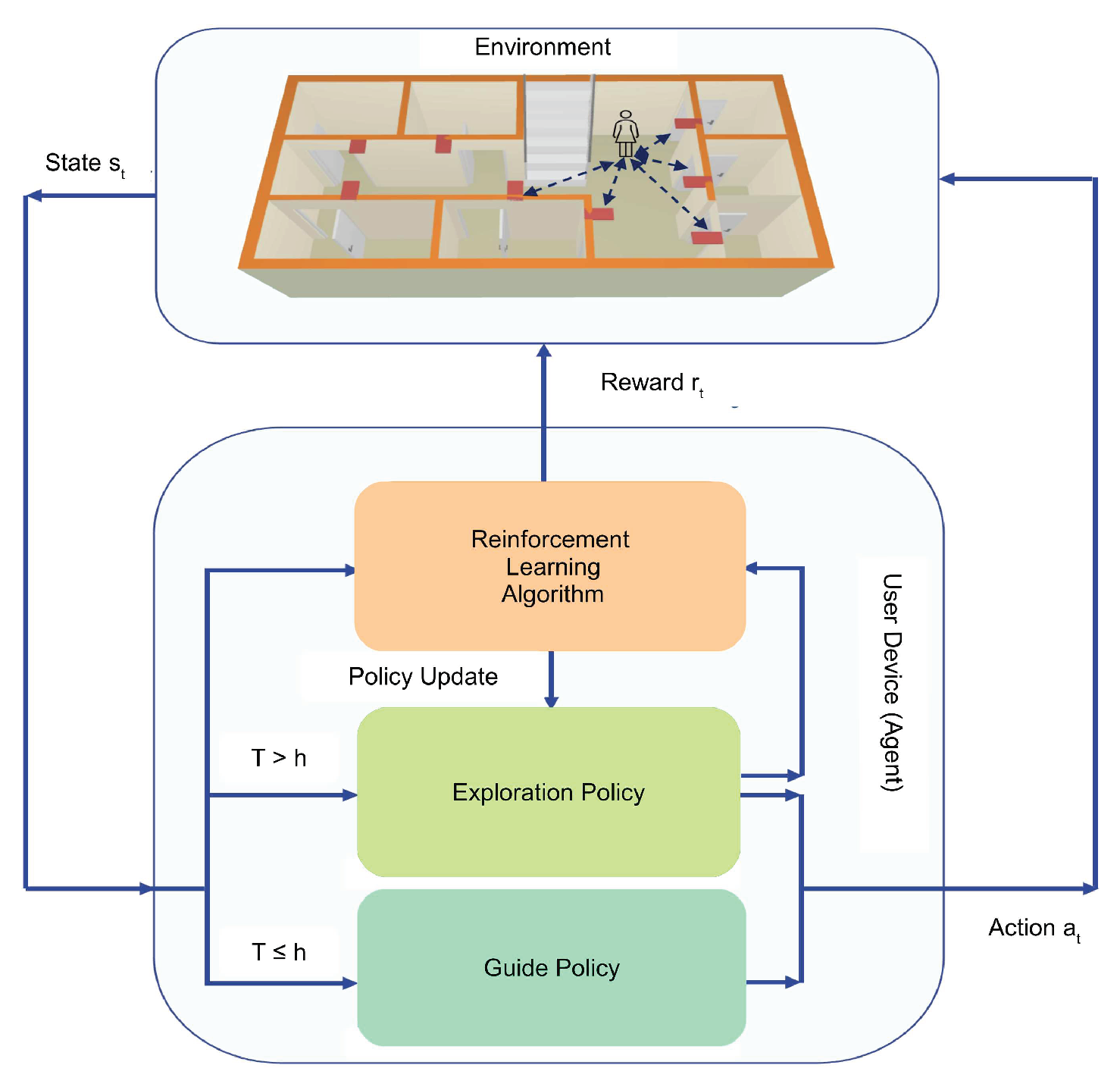
Figure 8.
Federate learning for IL [157].
Figure 8.
Federate learning for IL [157].
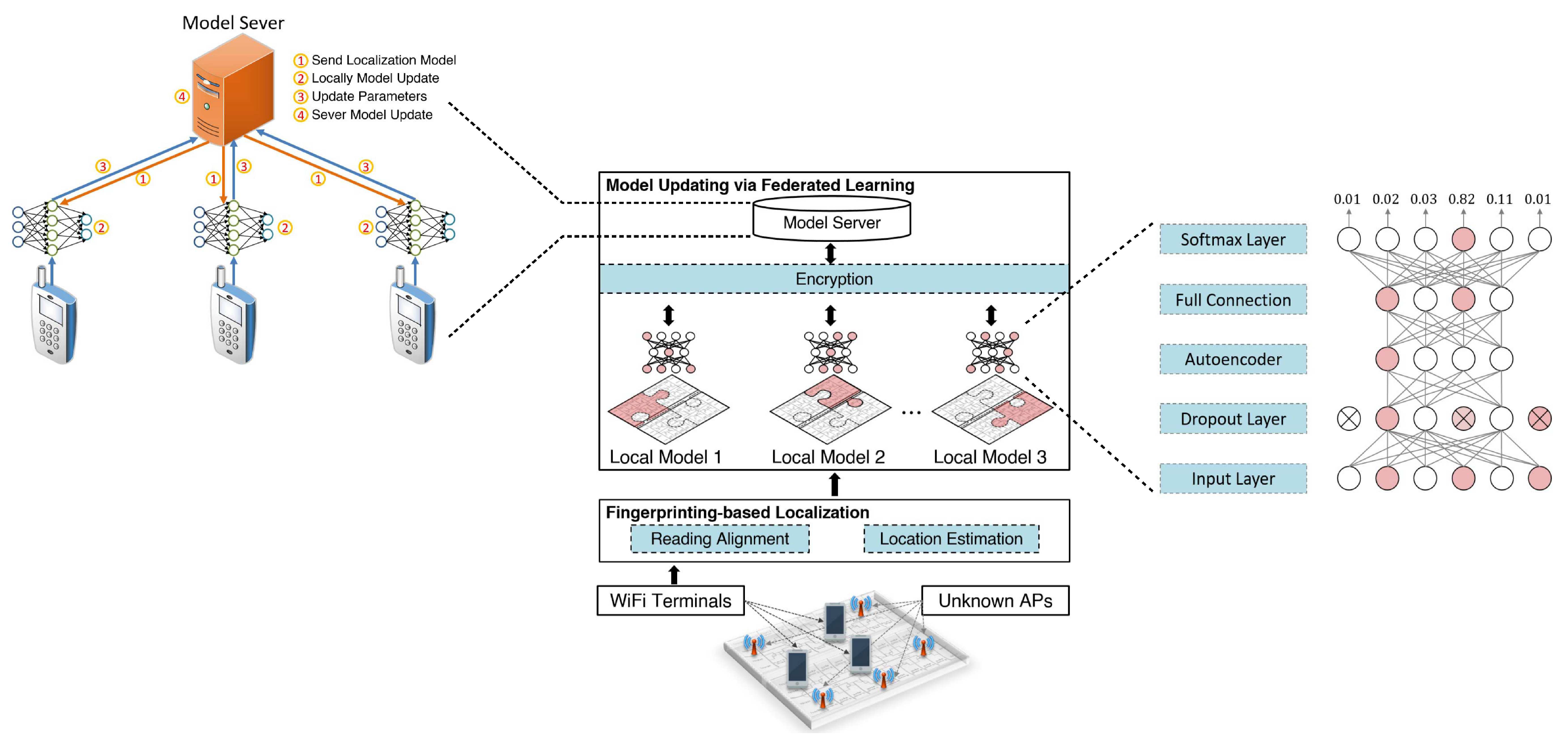
Figure 9.
Hybrid algorithms and technology.
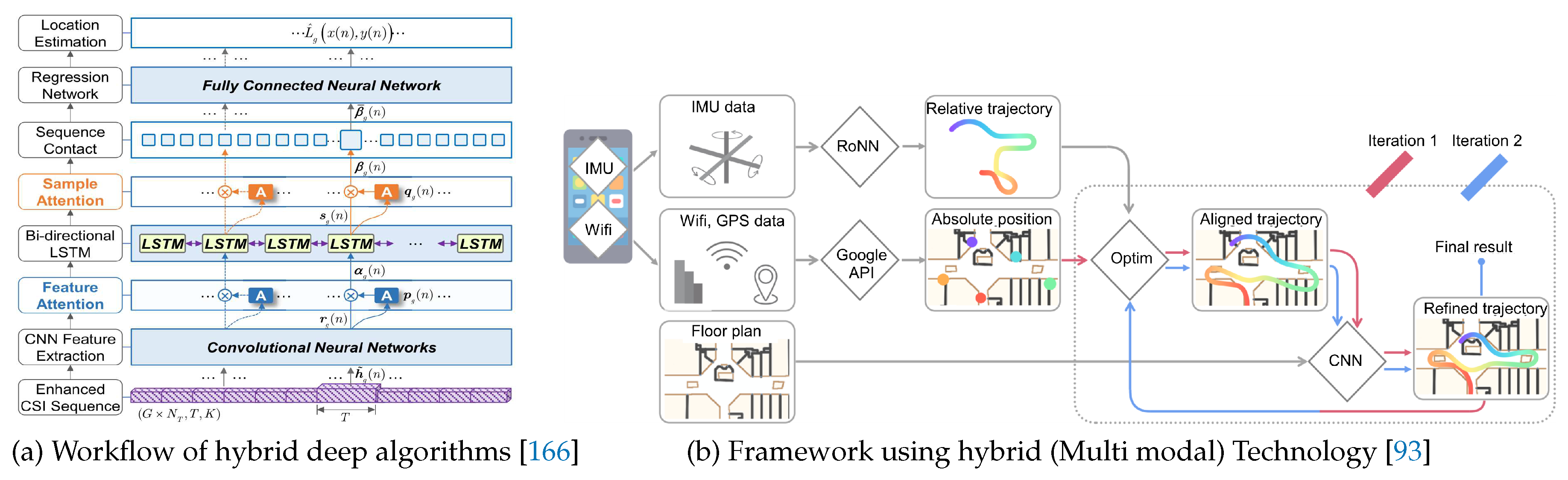
Figure 10.
Framework using adaptive graph representation [175].
Figure 10.
Framework using adaptive graph representation [175].
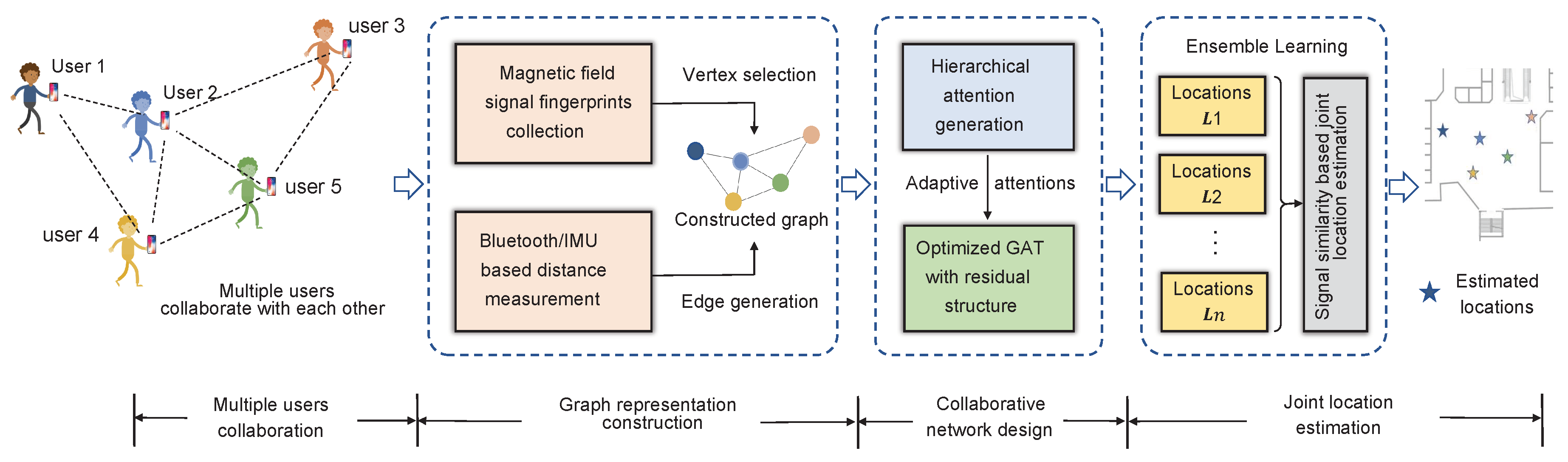

Table 1.
Contribution comparison again others work survey.
| Ref. | Fine-tuning | DA | DL | ML | Hybrid | FMT | Tech | Dataset | App. | Metrics | Challenges | Future directions |
| [4] | ✗ | ✗ | ✓ | ✓ | ✗ | ✗ | ✗ | ✓ | ✓ | ✗ | Constructing magnetic map, environmental noise, complex user behavior, energy, generalization | Hybrid technique, location-based services, optimize existing models |
| [5] | ✗ | ✗ | ✓ | ✓ | ✓ | ✗ | ✓ | ✓ | ✓ | ✗ | Latency execution, light conditions, Environmental surface (reflection), position changes, estimation depth map | ✗ |
| [44] | ✗ | ✗ | ✓ | ✓ | ✓ | ✓ | ✓ | ✗ | ✓ | ✗ | Multipath /NLOS propagation, high computational complexity, scalability, accuracy, adaptability | Standard, cost, lacks of variability, retrain DL model and time execution |
| [45] | ✗ | ✗ | ✗ | ✗ | ✗ | ✓ | ✓ | ✗ | ✓ | ✓ | Real-time, security, privacy, diversity, standarization, cost, network management, scalability, multipath and noise | Multipath effects and noise, variation of the environment, energy consumption, privacy and security, cost, standardization |
| [46] | ✗ | ✗ | ✗ | ✗ | ✓ | ✓ | ✓ | ✗ | ✓ | ✓ | Calibration, Standardization, generalization, users effect, noise, environmental change and device heterogeneity | Quantum localization, export more technologies, security and privacy, changing environment |
| [47] | ✗ | ✗ | ✗ | ✓ | ✗ | ✓ | ✓ | ✗ | ✗ | ✓ | Complexity environment, cost, effect of signal strength | ✗ |
| [48] | ✗ | ✗ | ✗ | ✗ | ✗ | ✗ | ✓ | ✓ | ✓ | ✓ | Cost, latency, generalization, environmental and effect multi technology | Security, noise reduction, improve accuracy, latency, device diversification, crowdsourcing, exploit DL |
| [49] | ✗ | ✗ | ✗ | ✗ | ✓ | ✓ | ✓ | ✗ | ✗ | ✓ | Configurations and adopted RFID technology, cost, energy, complexity | Flexibility and low complexity implementation |
| [50] | ✗ | ✗ | ✗ | ✓ | ✓ | ✓ | ✓ | ✗ | ✗ | ✗ | Fusion, efficiency, single or multi-measurement, cost | Calibration devices, change of environment |
| [51] | ✗ | ✗ | ✗ | ✗ | ✗ | ✓ | ✓ | ✗ | ✗ | ✗ | Environmental constraints, affected electronic devices, light condition, Device and user diversity, slow convergence | Effect of sensors, effect of sunlight |
| [52] | ✓ | ✗ | ✓ | ✓ | ✗ | ✗ | ✓ | ✓ | ✓ | ✓ | Scalability, performing fingerprint data, noise and change of environment, fusion data sensor | Standardization, privacy, lack of databases, heterogeneity devices, energy, delay transition |
| [53] | ✗ | ✗ | ✓ | ✓ | ✗ | ✓ | ✓ | ✓ | ✗ | ✓ | Map generation, NLOS, multi-path effects, orientation of RSSI, device heterogeneity, temporal conditions, cost | Improve performance, periodic update of fingerprint, automatically re-calibrate the RSS, scalability, cost, energy consumption |
| [54] | ✗ | ✗ | ✓ | ✓ | ✓ | ✓ | ✗ | ✓ | ✗ | ✓ | Environmental affection, most accurate WiFi, high-dimensional data, large dataset, computation | Explort, investigate and combine other sensors and CSI signal, investigate DL algorithm |
| Our | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | Standardization, multi-path, interference, Security, energy, cost | Digital twin and virtual environment, blockchain and exploit 6G |
Table 2.
IL and DL-based published papers between 2019 and 2023 (source: Scopus).
| Year | 2023 | 2022 | 2021 | 2020 | 2019 | Total documents |
| IL Paper | 430 | 1663 | 1458 | 1421 | 1756 | 6728 |
| DL Paper | 65 | 218 | 177 | 150 | 135 | 745 |
Table 3.
Characteristics of IL datasets.
| Work | Technology | Samples | Nature of data | Aera |
| [59] | WiFi | 110k | RSSI | 670 |
| [60] | WiFi | 30k | FTM, RTT | - |
| [61] | WiFi | 88M | RSSI | 717 |
| [62] | BLE | 4M | RSSI | 185 |
| [63] | Zigbee, BLE, WiFi | 300 files | RSSI | 142 |
| [64] | D-camera | - | RGB-D frame | 216 |
| [65] | Smartphone, Scanner | 679 / 2664 | RGB-D , image | 15,800 |
| [66] | WiFi, BLE, magnetic | 3D point cloud, Direction | building | |
| [67] | WiFi, IMU | 53 hours | Accelerometer, Gyroscope, magnetometer, RSSI | 14194 |
| [68] | MIMO | 252004 | CSI | 9 |
| [69] | Smartphone | 13 hours / 51km | IMU and magnetometer | 960 |
| [70] | WiFi | 26418 | RSS | 9564 |
| [71] | BLE | 2450 signal | RSSI | 98 |
| [72] | Camera | 21898 | Images (real and synthetic) | trajectory: 30 m |
| [73] | WiFi | 354RP, 100sample by direction | 9 RSSI | 918 |
| [74] | WiFi | 13 hours | CSI | - |
| [75] | WiFi, BLE, IMU | 100K samples, 30K wallk path | Accelerometer, Gyroscope, magnetometer, RSSI | ≈12600 |
| [76] | WiFi | 23935 | RSSI | 8000 |
Table 4.
Summary of different IL applications.
| Ref | Application | Technique | Method | Performance | Observation |
| [79] | Healthcare: fall detection and localization | RFID and RSSI | Trigger and IFTTT | err<20cm | Add more daily movement |
| [80] | Location and tracking | BLE | Trilateration and fingerprint | ACC = 90% | Low cost, test in real condition |
| [81] | Indoor Navigation autonomous | camera + Lidar | CNN | ACC:93.65 | Costly, test more environment |
| [82] | Smart farming for animal localization | BLE | RSSI + fingerprint | Err: 8 with 10 anchors, area: 1600 | Add IMU |
| [83] | Autonomous service parking | FM signal | Fingerprint map + CNN | up | Combination sources |
| [84] | Rescues Localization | Lidar + IMU | Online multi agent TSD- SLAM | err: 0.02 | Test the system in real condition |
| [85] | Higth risk intervention | Lidar + GPS | Fusion LI-SLAM and VI-SLAM | RMSE : 0.34 | Need improvement |
Table 5.
Summary of different Metric measuring of performance IL.
| Metric | Description | Equation |
| Accuracy | Measures the degree of precision in location estimation | |
| Adaptability | Measures the ability of the system to adjust to changing conditions and user requirements | - |
| Cost | Measures the financial cost of implementing and maintaining the system | - |
| Dynamic Range | Measures the ability of the system to handle a range of signal strengths and environments | - |
| Energy Efficiency | Measures the amount of energy consumed by the system to perform a location estimate | - |
| F1 Score | A measure of accuracy that takes into account both precision and recall | |
| Interoperability | Measures the ability of the system to integrate with other systems and technologies | - |
| Latency | Measures the time delay between the request for location information and the delivery of the response | - |
| MAE | Measures the average difference between estimated and true locations | |
| Maintainability | Measures the ease and cost of maintaining and updating the system | - |
| Precision | Measures the level of detail in location estimation | |
| Repeatability | Measures the ability of the system to produce consistent results over time and across different conditions | - |
| Recall | Measures the ability of the system to detect all relevant locations | |
| RMSE | Measures the average deviation between estimated and true locations | |
| Robustness | Measures the ability of the system to operate correctly in the presence of environmental disruptions | - |
| Scalability | Measures the ability of the system to handle increasing numbers of users or devices | - |
Table 6.
Summary comparison of different technologies based on various properties.
| Technology | Power consumption | Area coverage | Privacy | Cost |
| IMU | Low | High | Low | |
| Passive RFID | Low | Few meters | High | Low |
| Active RFID | High | 100 meters | Low - Moderate | Moderate |
| UHF RFID | High | Long range | Low - Moderate | Moderate |
| Bluetooth | Low | Around 100 m | Low - Moderate | Low- Moderate |
| WiFi | Medium | Depends on the AP | Low | Low- Moderate |
| Zigbee | Low | Up to 100 m | Low - Moderate | Low- Moderate |
| LORA | Low | Up to 15 km | Low - Moderate | Moderate |
| UWB | Low | up to 30 m | Low - Moderate | Moderate- High |
| Acoustic | Low | Up to 20 m | High | Moderate- High |
| Camera / RGB-D | Medium | Depends on the camera | Low - Moderate | High |
| LIDAR | Medium | up to 100 m | Low - Moderate | High |
Table 7.
Comparison of IL techniques.
| Technique | Advantages | Limitations | Accuracy | Attenuation | Sensitivity |
| RSSI | Implementation is basic. Time synchronization and angle measurements are not necessary. | Limited range. Radio map takes a great amount of effort and time. Any configuration changes the database must be updated | Low | High | Low |
| CSI | Passive measurements Provides detailed information about the wireless channel | Limited Range Affected by environmental | Moderate to high | Moderate | Low |
| ToA | Fingerprint database is not required. Used for distance-based localization. | Time must be exactly synchronised. The location of the access point must be given. | High | Low | High |
| AoA | Minimum of two receivers are required. Synchronization is not required. | Requires specialized hardware | High | Low | High |
| RTT | Address the synchronization issue on ToA. The system’s complexity is minimized. | Generates a significant volume of network traffic. Signal delay problem. Latency issue for location-based services. | High | Low | High |
| TDOA | Fingerprint datasets are not necessary. Synchronization between APs and the target not required. Required synchronization for APs only. | Line of sight is possible. Challenging to implement in a low-bandwidth environment. Prior knowledge is necessary. | High | Low | High |
Table 8.
Summary of different DL paper for IL.
| Work | Backone | Method | Best Performance | Dataset | Advantage/Limitation |
| [175] | GAT | Graph attention based collaborative | Reducing error: | Private dataset | Collaborative information/Calibration and security |
| [176] | CNN, DNN | Attention-augmented residual | ACC: 8% to 48% increase | [68] | Work for any device/Test in real condition |
| [177] | Resnet50 | Feature codebook | Recall: 97.12% | [178] [179] | adapted for various environment, latency/- |
| [180] | Adversarial nets | Generative Adversarial Networks | 90% less data | [181] | Need few data to create model/Tested in other area |
| [182] | CNN-LSTM | Hybrid DL and WiFi RSSI model | Mean err: 1.0863m | Private dataset | Latency/Test in real condition |
| [70] | RNN | Sequence model RNN with regression output | 3.05m, 38% less parameters | [70] | Sequence data/Test with multi model data |
| [138] | - | RL-based information fusion framework | MSE: 0.0077 | [183] | Perform well/Small dataset |
| [152] | GNN | Graph neural network of RSSI | ACC: 97.2% | [184,185] | Perform well, basic system/Add more features |
| [149] | DNN | Markov decision + DRL | MSE a had: 95% | Private dataset | Involve previous localization without parameterization / Dependency on large amount data |
| [186] | - | Stacked denoising AE | 1.21m to 2.64m | Private dataset | Robust and stable/- |
| [187] | LSTM | Stacked LSTM encoder–decoder | err : 0.45% - 5% and 0.84% - 4 % | Private dataset | Accurate,low power consumption/- |
| [157] | DNN | Fingerprinting system based FL | Improve up to 90% | Private dataset | Update localization, privacy /Test in large dataset |
| [188] | CNN | Fingerprint using CNN and PCA by convert signal 1D to 2D | ACC: 94% | [189] | Exploit signal 1D to 2D/ Time computation increase |
| [115] | - | Kalman filter and variational AE | ACC: 85% | Private dataset | Generalize model, able to tracking/Improve the accuracy |
| [118] | CNN | Estimation of AoA | ACC:0.7m | [71] | Need small data, accuracy, robust, low complex/- |
| [190] | GoogleNet | 3D model deep bayesian CNN | ACC: 1.6m | [72] | Synthetic data, less error trajectory/Problem light, low improve |
| [158] | - | Bayesian fusion rule with personalized FL | Improve up 23.4% | [185] | Good performance/Imbalanced data |
| [154] | GNN | Graph regression based RFID | 5.74 cm | Private dataset | Accurate/Sensors expensive |
| [166] | CNN-BiLSTM | Dual-attention mechanism including a feature-based CNN, BiLSTM outputs | MAE = 0.65m to 1.03m | Private dataset | Improve, robustness/Not all technology are tested |
| [168] | Resnet- Bi-LSTM | 3D THz based: AoA, received power, delay | Mean err: 0.25m | Private dataset | Less complex, latency, Robust noise/- |
| [170] | LSTM | Streaming recurrent fusion based multi-modal | Mean err: 0.06 | [191] | Benchmark work to compare/ Test in real condition |
| [39] | DNN- GAN | DNN and weighted GAN-based semi-supervised system | Improve by 8.53 % to 10.11 % | [185] | Few data for training/Need retrained, not automatic |
Table 9.
Summary of different Fine-tuining paper for IL.
| Ref | Method | Best Performance | Dataset | Advantage/Limitation |
| [40] | Tune Federate learning and CNN | Mean error:42.18cm, average training time: 34.78% better | - | - |
| [198] | CNN TL using 5G fingerprint | improve 37%, new environment 19% | Private | Small data, Good performance/Limited to static environment |
| [199] | CNN-based DL and transfer learning NLOS | ACC: 98%, time training 48× faster | Private | Faster training, function properly in unknown areas /Expanded testing |
| [200] | Stockwell transform CNN (ST-CNN) | 97.17%, 97.14% for NLOS, WLOS | [201] | Less data training/Latency |
| [202] | Heterogeneous TL based on co-occurrence | Mean Err less to 17.15% | [203] | Robust environmental change/Work only for adequate samples |
| [204] [205] | Self-calibrating indoor crowd sourced localization method | Mean err: 0.37m | Private | Need half data for training/Few degradation performance with time |
| [206] | Sparse Fingerprinting and TL-based UWB | Improve ACC: 31% | Private | Reduce Error/More Tests |
| [207] | NN based on Multi Tracker Direction Motion Constraint | Improve ACC: 34% | Private | Easily to extend/Apply to other building |
| [208] | Long Short-Term indoor Positioning | Improve Mean ACC: 18% | [209] | Good performance/adjusting balance between target and environmental dynamics |
| [210] | CNN and TL-based CSI data | Improve ACC: 4.7%, time training up to 40% | [211] | Adapt to the dynamics scene/- |
| [212] | TL based LSTM | Improve ACC: 60% | Private | Tested in different devices/comparison with kNN |
| [213] | Fuzzy and TL-based adaptive fingerprint | Mean err: 0.54m | Private | Cost reduced/complex model |
| [214] | Improved Transfer AdaBoost | ACC: 0.75 m, improve by 30% | Private | Low space and faster/Test on real condition |
Table 10.
Summary of different domain adaptation paper for IL.
| Ref | Method | Best Performance | Dataset | Advantage/Limitation |
| [215] | Data augmentation and self-attention transformer encoder | Improve ACC: 41% to 68% | Private dataset | Generalized approach/Calibration impprove |
| [218] | Variational AE | Improve ACC: +20.2% | Private dataset | Improves performance/Investigating ML |
| [220] | Online meta-transfer learning method based OTSU segmentation | ACC: 95% | Private dataset | Rapid adaptation under changing conditions and users/Weak segmentation on continuous gestures |
| [221] | Multi-level pose regress and feature discriminator | - | [190] | Increases efficiency/Test on real scene |
| [208] | Long Short-Term indoor Positioning | Improve Mean ACC: 18% | [209] | /Adjusting balance between target and environmental dynamics |
| [222] | Fingerprint-based heterogeneous knowledge | Mean err: 1.58m and 2.23m | [203] | Robust in changing environment/Tested in other area |
| [153] | GNN-based few-shot TL | 95.83%, 85.91% with 40X fewer labels | Private dataset | Reduce the data-labeling/ |
| [219] | Adversarial and attention graph convolutional Network | Mean Err: 4.84m, 5.32m | [75] | Competitive system/ Improve performance |
| [202] | Heterogeneous TL based on co-occurrence | Mean Err less to 17.15% | [203] | Robust environmental change/Work only for adequate samples |
| [223] | Adaptive DNN | Improve ACC: 25% | Private | Achieve good performance long time/Extend to more building |
| [224] | CSI based on neuron network model adaption | Mean err: 1.26m | Private dataet | Improve time training / Test in more environment |
| [225] | Unsupervised DL Adaptation | Mean Err: 0.85 m | Private dataset | Low cost dataset, Need few data/- |
| [226] | Domain adaptation network based on Deep Mean correlation alignment | Mean Err:2.58m | [227] | Improve well / Add test in a different context |
| [228] | 1D Convolutional AE | Mean Err : 1.11 to 0.54m | Private dataset | Robust on dynamic environment/ Used a threshold to track |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



