
Submitted:
01 July 2023
Posted:
05 July 2023
You are already at the latest version
Abstract
This research is a preliminary phase of a general effort to develop a generic-data transferring capability via human haptic thermal sensation (generic-data refers to a coded language like Morse or Braille). For the capability to be effective, it must include a large variety of short recognizable cues. Hence, we propose the concept of cues based on sequences of thermal pulses, i.e., combinations of warm and cool pulses with several levels of intensity. The objective of this study was to determine the feasibility of basing a generic-data-transfer capability on thermal cues composed of sequences of short pulses. The research included defining the basic characteristics of the stimuli parameters and developing practical methods for generating and measuring them. Several sequences were designed in light of the relevant data known to date, and tests were conducted. The thermal cues presented to the participants were sensed and recognized by touch. The results indicate high feasibility for a capability that is applicable in various scenarios. In addition, the low impact on human skin temperature due to short stimuli duration represents an inherent advantage for later implementation. This report presents promising findings and offers insights for further investigation.
Keywords:
data transfer
; haptic thermal interface
; thermoelectric cooler
; thermal cues
; thermal patterns
; thermal pulses
; thermal icons
; thermal communication
1. Introduction
Many activities in modern life involve data transferring via human-machine interfaces (HMI), in which data is presented by a designated device, and acquired by our senses. These activities can be divided to two general scenarios and hence two general purposes; virtual/augmented reality (VR/AR) – in these cases the presented stimuli simulate characteristics of the environment, causing the desired perception (e.g., in gaming, military uses, robotic or distant surgery etc.), and communication - where the stimuli represent predetermined messages or information. The volume and versatility of the data are continuously expanding as technology advances, and hence the requirements for available channels and methods. The leading bioinspired approach for VR and AR applications is to combine senses in order to increase immersion hence enhance virtual experience. This approach was proven efficient for haptic communication as well, for applications requiring large haptic cue sets. For instance [1] combined vibration elements with a lateral skin stretch component (performs a rotation motion) and a radial squeeze element (tightens a band wrapping the user's arm), and showed that incorporating multiple forms of tactile stimulation improved perceptual distinguishability, in comparison to only vibration signals. A following evaluation of this system demonstrated substantial success in identifying phonemes and words [2]. Additional prototypes of wearable haptic devices comprised of multiple modalities are listed and described in [3].
The haptic thermal sensory modality offers a novel dimension for transferring information, provided the thermal cues are designed in accordance with the human sensory system properties. The thermal sense naturally serves as a data transferring medium in our everyday routine. It takes part in perceiving the environment, assessing the temperatures of surrounding objects and recognizing the material they are fabricated of. Intensive research has been addressed over decades to understand the physiology and psychophysical processes associated with the human thermal sense, showing remarkably high sensitivity and resolution. Humans are surprisingly susceptible to changes in skin temperature, especially for cooling [4]. We can resolve a difference of 0.02–0.07°C in the amplitudes of two cooling pulses or 0.03–0.09°C for warming pulses, and detect thermal stimuli when skin temperature rises by 0.2°C or descends by 0.11°C (at rates above 0.1°C/s) [5,6,7,8]. These values are highly dependent upon various objective and subjective parameters, some of which relate to the participants, such as variance between people, the current state of mind, skin temperature baseline, etc., and others relate to experimental limitations. However, these values provide a sense of the natural human capabilities we wish to harness to develop a communication datum.
A survey of the reported applied research on thermal communication and other applications, was recently conducted [9]. These reports showed that combining thermal feedback with other types of feedback, can improve performance in the various applications. Adding thermal information regarding objects being virtually touched can increase the feeling of immersion, and simple thermal messages indicating locations or emotions can be of use. The authors concluded that the potential interest of thermal devices lies in the areas of both gaming and communication, and that there is much room for further research.
The importance of developing a method to effectively use the human thermal sense as a data transfer medium derives from the many potential implementations it is expected to have as an alternative or complementary channel for various scenarios in which conventional channels such as vision, hearing, and tactile sensing are not applicable or not sufficient (e.g., enhancing communication capability for the deafblind [9,10], transferring discrete messages in silent or, alternatively, in noisy environments). The use of thermal signals for this purpose is fraught with many difficulties due to the human factor on the one hand and technological factors on the other; see thorough reviews at [5,11]. Some of the major challenges due to the human factor are overcoming the limited number of sensations evoked by changes in skin temperature, the multiplicity of parameters that influence the human thermal sensitivity, spatial summation causing poor distinction between adjacent cues, thermal adaptation and thermal dynamics of the tissue affecting the human response and hence the sensation. The corresponding technology challenges are to create and control the desired thermal stimuli and to monitor the response without influencing the heat transfer process itself.
Developing a capability of generic-data-conveyance via the haptic thermal sensation means using a thermal display to present encoded abstract information to be sensed and decoded by touch. A thermal display can take various shapes and forms: portable and accessible devices such as a mobile phone (stimulated by Peltier modules) [12], a wearable item such as a watch or bracelet [13], or a clothing item fabricated from a smart textile with active thermal actuators and embedded devices [14,15,16], or stationary elements typically in contact with the user, for instance a vehicle or theater seat, etc. The most commonly used technology in research is Peltier thermoelectric coolers/heaters (TEC). They are characterized by a fast and reliable response to the electric driving current stimulus, forming a corresponding thermal signal.
The thermal cues must be knowledgeably designed to guarantee perceptual distinction between them, with high reliability. Inspired by other non-visual interfaces, namely audio 'earcons' and vibrotactile 'tactons', some basic 'thermal icons' were created by several research groups by varying the direction of stimuli (warming or cooling), the magnitude of temperature change, and the rate of temperature change (ROC). The 'icons' are visual expressions of the patterns of temperature change vs. time. These various studies were planned to address different emphases (e.g., compatibility with mobile environments, comparing different body areas, the emotional influence, outdoor vs. indoor performance, etc.). However, their main objective was to investigate the use of thermal haptic feedback for human-computer interactions (HCI) aimed at determining the reliability of these patterns in terms of recognizability. The initial experiments conducted in [17,18] using four different patterns with a 14-16s duration showed that the direction of change in temperature (warming or cooling) is the most salient parameter of a thermal icon, performing 97.4% identification accuracy (for individual parameter identification). The overall identification rate for all four tested thermal icons was 82.9%. The ROC was less perceptually distinguishable, even though it was combined with magnitude to create an integrated subjective intensity parameter, with 85.4% accuracy for the individual parameter, for two levels of intensity (strong: 6°C at ROC of 3°C/s, moderate: 3°C at ROC of 1°C/s). In [19,20] a set of 6 different icons was designed, 8 seconds long each, with the two optional directions (warming and cooling), one consistent magnitude of change (6°C), and 3 different levels of ROC (0.7, 1.5 and 3°C/s) showing in addition that presenting a dual signal yields high distinction from the one-pulse stimuli, with 99% accuracy. Intensity represented by ROC remained a moderate perceptual distinguishing parameter, with 86% accuracy for 1.5°C/s and 82% for 0.7°C/s.
Seeking a leading concept for an effective set of thermal cues, we observed existing binary generic-data-conveying methods to hopefully adopt components or ideas from proven successful coding systems. Effectiveness in this context means allowing more data flow per time unit. The desired capability requires a system that enables creating a sufficient number of different, temporally short, recognizable cues. This paragraph briefly reviews two well-known methods that have been proven efficient over many years of use, and are analyzed here with relevance to the thermal medium. First is the Braille code, a tactile writing system for the blind, and second is the Morse code, a method used to transmit messages in telecommunication. The Braille code uses six-bit cells that include six fixed positions, two columns of three each. Every position can be either doted (with raised dots) or not (flat, empty position), hence forming a binary system of 64 possible combinations encoding up to 64 text characters. Braille is a spatial encoding system since all the components that assemble the cue are perceived simultaneously, using location in space as the differing factor. This method utilizes the haptic medium to overcome the lack of sight. Perceiving sets of clustered dots raised by 0.6-0.9mm appears to be an extremely high requirement skill, yet it is commonly learned worldwide by those in need. The Morse code uses standardized sequences of two different signal durations, in which every sequence encodes a text character, thereby forming a temporal encoding system. Morse messages are usually transmitted by an ON-OFF keying of an information-carrying medium such as electric current, radio waves, visible light, or sound waves. This method enables the use of conventional communication channels such as audio and visual when either the transmitting or the receiving end, or both, are limited. The primary platform for this method is binary, as it includes signal or non-signal. However, for practical reasons, the non-signal is limited to serve only as a space bordering the signals and is consistent (one unit between signals and three between symbols), and, on the other hand, the signals are diversified to two easily distinguished durations, symbolized as dots and dashes.
Inspired by these insights, and equipped with the conclusions from the reported work on thermal cues mentioned above, we propose the concept of sequences of quick thermal pulses, for a haptic data-transferring method. The short pulses concept implements advantages observed in other methods and approaches and attempts to compensate for inherent relative disadvantages of the thermal medium such as poor spatial sensitivity and slow response. The idea of creating temporal sequences of stimuli was adopted from the Morse code, and the confidence in the human ability to acquire a new skill that involves an extraordinary natural capability was inspired by the acceptance of the Braille code. The thermal icons evaluated to date extended between 8s and 16s per signal and offered a minimal variety, with insufficient reliability. The proposed concept applies the excellent distinguishability that was observed between warm and cold stimuli, and between single and dual stimuli. It also assumes that this capability can be expanded to a trio of stimuli. The inferior performance regarding stimulus intensity, showing only a moderate ability to distinguish between levels of temperature rate of change (ROC), is attributed to the fact that the test procedures in the reported experiments required not relative distinction but rather absolute recognition. The proposed concept herein requires a relative distinguishability between sequential pulses of varying intensities. This fundamental difference between these two capabilities is assumed to lead to an excellent distinction between intensities as well, provided the cues are designed appropriately. Ultimately, the short duration of cues based on a few short pulses, alongside the potentially large variety of different sequences, are basic requirements for effectiveness.
This study aims to prove the feasibility of transmitting information using haptic thermal signals composed of different sequences of short pulses. In practice, this means to design and create a set of thermal pulse-based patterns, and empirically show that they are highly distinguishable and recognizable. An integral part of this feasibility study was to knowledgeably determine criteria for designing a library of patterns, including the required properties of the pulses (mainly magnitude, duration, and interval between pulses) and potential combinations.
After this introduction, the paper lays out a scientific background with relevant information and aspects to support the research, and goes on to present the research methodology and the experimental results followed by a discussion analyzing some major aspects of the findings and establishing conclusions for further research and future implementation.
2. Background
The haptic thermal sense conceptually resembles other senses, in the aspect that designated receptors transmit messages through the nervous system, reflecting their reaction to stimuli. More specifically, as in other haptic senses, the thermoreceptors are scattered throughout the dermis layer of our skin tissue. However, other than the similar concept, it has its unique features and characteristics. It is essential to establish a deep understanding of the thermal sensation process in order to formulate appropriate test procedures, intelligently observe the outcomes and investigate the results with correspondence to the current research objectives.
The thermal sensation is composed of several complementary processes and can be described with various approaches and interpretations, serving different purposes. The description herein was tailored to support the current study; that is, to help understand the challenges in light of the research goals, the grounds for the chosen approaches, and the analysis and evaluation of the test results. We distinguish between the physical process in our skin following contact with an external thermal stimulus and the sensing mechanism that detects the physical event and translates it to a thermal perception.
The physical process that occurs in our skin in response to a thermal stimulus is a conductive heat transfer that includes heat exchange on the skin surface and the consequential heat flow through the skin tissue. The thermal stimulus can be applied to the skin either by contact with an external object of a different temperature or, in a scenario more relevant to the current research, when the thermal equilibrium at an ongoing skin-object interface is disrupted by a change of temperature imposed on the object. In both cases, the heat transfer starts with heat exchange between the skin and the object due to the temperature difference, and progresses in-depth to the tissue. The process rate, or the heat flow intensity, is determined by the thermal properties such as the specific thermal capacity and specific thermal resistance of the skin, the thermal display, and the interface. The heat within the tissue is distributed in accordance with the boundary conditions – the thermal stimulation on one end and the regulated body temperature on the other.
A heat transfer process has by definition two aspects: one is the energy flow in the direction from a higher temperature level towards a lower temperature level and the other is the inevitable change of temperature along the heat transfer path. The relation between these two aspects is the heat capacity of the skin, a physical property defined as the amount of heat (measured in joules) needed to produce a temperature change of one kelvin for a unit of matter (skin). The temperature change with time due to the heat flow within the skin tissue results in a slight restraint to the process as it gradually moderates the temperature gradient that was formed. But since this research focuses on short stimuli, the impact is minor. However, the skin surface temperature change during heat exchange at the interface is significant, granted the initial stimulus was significant. The immediate response to the stimulus is a rapid temperature drop or jump, according to what the case may be, attempting to equalize the two sides of the interaction, thereby continuously reducing the gap. Hence, the rate of temperature change, until it stabilizes with time. This continuous change in skin surface temperature dramatically influences the heat transfer process within the skin tissue.
The cooling or warming curve (temperature vs. time) formed during this dynamic process is directly determined by the thermal properties, resulting in typical curves for different types of material. Materials with high thermal conductivity or high specific thermal capacity such as metals produce a higher initial changing rate and a larger total change in skin temperature than those with low ones such as plastics or wood, due to their higher tendency to transfer heat. A controlled thermal display acts like a material with extremely high thermal coefficients, causing an extreme cutaneous response as the control system provides an 'endless' thermal capacity. The thermal display acts in this case more 'aggressively' and less tolerantly to the attempt of the skin to change its temperature, thereby causing an ongoing heat flow and hence a dominant thermal sensation.
The sensing mechanism involves a physiological-biochemical process that creates nervous signals in reaction to the physical process, and a psychophysical process that interprets the data, establishing the final perception. The nervous signals are produced by transducing the stimulus energy into action potentials and transmitting the data through the nervous system. Two kinds of thermoreceptors are located in the dermis layer of the cutaneous tissue: warmth receptors at a depth of 0.3mm, innervated to the central nervous system (CNS) via unmyelinated C-fibers characterized by a low conduction velocity of 0.5-2m/s, and coolness receptors located relatively closer to the skin surface at 0.15mm that are innervated mainly by thinly myelinated A-delta fibers with a faster conduction velocity of 3-30m/s. Each type of thermoreceptor has a typical action-potential discharging rate per given temperature. Hence, the thermoreceptors actually react to the local temporal temperature they sense, by adjusting the rate of action potential discharge according to the firing rate vs. temperature graph. The action potential is often referred to as the nerve impulse. Each pulse is attributed to its source, either warmth or coolness receptors, so that the total balance of pulse rates can reflect the skin temperature sensed by the biological-biochemical mechanism.
However, this process does not entirely dictate the actual thermal sensation. The thermal sensation is perceived with the intervention of psychophysical processes that influence the sensitivity thresholds and dominate the actual thermal perception. The role our brain plays in the process of forming the thermal perception is extremely dominant, to the extent that it even creates illusions in various constellations, in which the thermal sensation significantly differs from the physical reality [9,21,22]. Thermal adaptation is a key phenomenon imperative to acknowledge for a basic understanding of thermal perception. Thermal adaptation occurs within the range of 30-36°C, causing the sensation to be neutral as long as the temperature remains constant. A deviation from the action potential transmitting rate balance due to a change in skin temperature, upward or downward, evokes a warmth or coolness sensation, respectively. Beyond the neutral range, the sensation continues even with constant temperatures. The outcome is that within the neutral range, the thermal sensation reveals a change in skin temperature rather than the actual temperature level. In other words, our thermoreceptors are always exposed to one temperature level or another, and constantly sense the local temporal temperature and react accordingly. Even so, sensation remains neutral regardless of what that temperature is provided it is constant and within the neutral range. Only a change in temperature causes a thermal sensation, as the receptor's reaction to it is translated into a feeling of warmth or coolness depending on the direction of the temperature change. The intensity of the thermal sensation is proportional to the rate of temperature change. A complementary phenomenon that has direct practical implications is the dependence of the thermal sensitivity threshold on the rate of skin temperature change (ROC) [5,6,7,8]. This means that the thermal sensation is evoked by a change in temperature only from a certain minimal ROC, under which it will remain neutral despite the actual change that is occurring. From a different perspective it means that in order to create a noticeable separation between consecutive stimuli, it is not necessary to reach a complete cessation in heat flow and in temperature change.
To establish a better understanding of the adaptation phenomenon, an emphasis should be made on the meaning of a constant temperature in this regard. As discussed, although the sensing mechanism is used to explore external stimuli, it actually reflects the temperature of the skin itself, i.e., the cutaneous reaction to external stimulation. Therefore, a neutral feeling indicates that the skin is maintained in thermal equilibrium and the stimulus did not cause a change in the temperature at the thermoreceptors. It does not indicate that the object in contact with the skin had a constant temperature, but, on the contrary, contact with a thermally steady object may indeed cause a thermal sensation, and it usually does. For instance, the temperature gradient that naturally exists in the skin when not in contact with anything is determined by the two boundary conditions: ambient air at the outside and body regulated temperature inside, and by the thermal characteristics of the skin and the air (the air is characterized by a significant convection coefficient and high resistance to conduction). Contact with an object causes two changes in the thermal situation. Convection from the skin to the ambient air is terminated since the skin area that is now in contact with the object is no longer exposed to the air. The average skin-surface temperature under standard conditions is approximately 32°C [4], therefore, touching an object at room temperature initiates a process of conductive heat flow due to temperature difference. The heat flow intensity and the transient dynamics, as well as the final interface temperature, are a result of the initial temperature difference and the thermal characteristics of the two materials involved in the interaction – the skin and the object. Once the process becomes steady and a new equilibrium is established, the neutral sensation returns.
The temperature transient that occurs in the skin following contact with an external object, is influenced by its thermal characteristics. Therefore, the human ability to perceive the temperature transient makes it possible to recognize the type of material being touched. This in fact is the idea behind material recognition based on thermal cues. The very same capability of noticing and distinguishing between stimuli is the basis for the current research, as it focuses on reaction to short thermal pulses. This analogy is relevant because the cutaneous reaction to a transient dynamic thermal stimulus resembles the initial stage of the reaction to contact with an external object. However, there are several differences between the two situations that must be taken into account when designing the thermal cues and when analyzing the test results. In this research, the skin surface is in continuous contact with a controlled thermal display that presents predesigned cues that are based on sequences of pulses, and the participant is required to subjectively identify the different cues. The following are some of the major aspects that are unique to this situation vs. material recognition:
- The thermal recovery that occurs in the skin once the heat pulse ends is driven by the controlled temperature of the thermal display. However, in the case of extended contact with an object, the outer boundary condition, following the initial rapid temperature drop or jump, is the skin-object interface heading towards their equilibrium temperature. In this context, the pattern design must guarantee that a neutral sensation is regained between consecutive pulses to verify temporal distinction between them.
- Normally material recognition involves a combined tactile sensation, whereas our tests examine the thermal sense alone. Hence, distinguishing between pulses and recognizing patterns is expected to be more challenging, requiring design with more distinct differentiation.
- Due to the nervous differences explored earlier, the human temporal processing of dynamic thermal stimulation differs for warmth and cold senses. The response time to thermal stimuli was found in [5] and [23] to be more rapid for cool stimuli (0.3-0.5s for ROC greater than 0.1°C/s) compared to warm stimuli (0.5-0.9s). An investigation of the physical-perceptual correspondence of dynamic thermal stimulation [24] concluded that the sense of cold is more transient than the sense of warmth, and therefore responds more rapidly to transient changes (dT/dt). When dealing with pulses that extend only fragments of a second, the different time reactions we have to warmth and cool stimuli impact sensation, and therefore must impact stimuli design.
A significant part of this research is devoted to determining the characteristics of the stimuli parameters, as well as developing practical methods for generating and measuring them. Since the goal is to create a set of thermal cues that will be noticeable and distinguishable by practically everyone in maximum circumstances, a fundamental question is how to control the cues to guarantee similar impacts on all users, causing similar thermal sensations. In other words, how to control the thermal cues in a way that the temperature change or the heat flux by the thermoreceptors will be indifferent to uncontrolled versatile parameters that influence the human reaction to thermal stimuli.
The thermal display temperature can seem intuitively like an appropriate measure for the intensity of the stimulus. However, the actual cue that enters the skin is delayed by the thermal resistance of the contact zone. The contact resistance causes the temperature of the person's skin fragment under test to differ from the temperature of the thermal display. The extent of the delay varies and is difficult to determine because the resistance coefficient is influenced by many parameters such as pressure, humidity, hairline, oiliness, and others. Hence, controlling the stimuli by thermal-display temperature lacks reliability and efficiency.
Attempting to skip the contact resistance and monitor the skin surface temperature directly encounters technical limitations that prevent acquiring a reliable result. The challenge is to monitor the skin fragment that is in contact with the display, but without the sensor touching the display. The sensor must be placed directly at the skin-display interface, but then it is inevitably disturbing the heat exchange process between the display and the skin, at the very area being monitored. Furthermore, direct contact with the display distorts the thermistor's input, thus the measurement does not purely reflect the skin temperature. Distancing or alternatively isolating the sensor from the display adds a bypass to the heat flow path, driving it via the skin fragment from the contact zone to the sensor. This results in a reduced measurement that reflects an area of the skin that is not in direct contact with the thermal display. Due to the significant thermal resistance and heat capacity of the human skin, this factor may be meaningful. Aside from these technical issues, the true skin surface temperature, even if it could be reliably measured (by neglecting or evaluating the disturbance, or by avoiding it, for instance by using a thermal camera), lacks validity as a controlling parameter since it is influenced by the individual's temporal thermal properties, hence impacting the temperature change sensed by the thermoreceptors for a given stimulus.
An alternative approach is to find a way to monitor heat flux. The heat flux pumped through the surface of the thermal display is directly sensed by the thermoreceptors. This is under the assumption that the heat flux from the thermal display into the skin is unidimensional, and the losses due to heat distribution along the skin surface are assumed to be negligible. Thus, the best thermal stimulus is the controlled heat flux. However, the heat flux is very difficult to measure, hence it is difficult to implement its feedback control. The cutaneous temperature change detected by the human sensing system is an expression of the heat flow generated by the thermal stimulus, and so it indicates the intensity and direction of the stimulus. A warming stimulus means the heat flow is directed into the body and a cooling stimulus means the heat is flowing outward from the body. Therefore, the heat sensation is a measure of the heat flux. The opposite is true as well: if heat flux could be measured reliably, it would enable predicting the corresponding heat sensation.
A thermoelectric cooler (TEC) is a solid-state heat pump that employs the Peltier effect. TECs pump heat from one surface to the other using electrical power. The heat flux coming into or out of the TEC surfaces is proportional to the electrical current applied, times the temperature of the surface in kelvin. Since the variations of the thermal display's absolute temperature are relatively small, the heat flux is almost proportional to the electrical current driving the TEC. To be more precise, the TEC full heat equation includes two terms that represent energy waste due to resistance of the TEC material itself, one thermal resistance and the other electrical resistance. However, the equation defines the steady-state achieved with time and at the initial stage of a dynamic stimulation these terms are negligible. The heat flow direction is in accordance with the direction of the electrical current.
The TEC is an excellent candidate to serve as a thermal display in experimental research. One side of the TEC is maintained at a predetermined stabilized temperature, causing the positive or negative temperature difference forced by the input current to impact the other side, hence creating the desired thermal stimulus. The approach considered in this study is to control the electric current driving the TEC, rather than directly controlling the thermal stimuli. In practice, the correlation between the electric current and the thermal cue displayed is not perfect due to a physical limitation we showed during experiments: Although TEC backside temperature is stabilized, the control circuit cannot react fast enough to thermal pulses, and a pulse-like change in its temperature is observed, thereby decreasing desired temperature change on the front surface serving as the thermal display. However, it seems to be a consistent and predictable phenomenon with only a quantitative impact. Hence, the correlation is assumed to be acceptable for this study that is focused on evaluating the concept of pulse-based patterns, particularly due to the understanding that the recognizability is based on the relativity of the thermal sensation comparing adjacent pulses.
A specially designed voltage-controlled current driver, known as a transconductance amplifier (TCA), was fabricated and implemented. The stimulus is generated as a voltage versus time table and fed to the TCA from a laboratory voltage generator. The TCA transforms the input voltage to a proportional current and drives the TEC with it.
An original modeling tool was developed in [25] and used in the current research to simulate the human response to thermal stimuli. The human skin tissue model was developed using the one-dimensional finite difference method. The thermodynamic parameters of the skin were obtained from [27,28]. On the inner side of the skin, the boundary condition is the typical human core temperature of 37°C. The outer boundary condition is one of two alternatives; in the absence of a stimulus, it is the room air temperature, taking into consideration the thermal resistance of convection exchange, and in the presence of a stimulus, the boundary condition is the heat flux from the thermal display. Figure 1 depicts a schematic illustration of the skin structure (a) and the finite difference model in the form of an equivalent circuit (b), where resistances represent the thermal resistance of the mesh node, the capacitors represent the heat capacity of the node, voltages are equivalent to temperature, and currents are equivalent to heat flux. The boundary conditions are represented as a voltage source in a temperature boundary condition case and a current source in the heat flux boundary conditions case. The entire volume of tissue involved is divided into a network of elementary volumes (nodes). The minimum number of nodes in this network is chosen so that the heat accumulated by the thermal mass of the elementary volume is significantly less than the heat flowing through it [29].
The model enables simulating heat flow and temperature at any given location throughout the system including inside the tissue volume, for instance, at the depth of the thermoreceptors. The model also allows us to adjust parameters according to a variety of skin types, test conditions, or thermal display characteristics and simulate the response to different stimuli. The thermal signals for the current study were designed with the aid of this simulator.
3. Methodology
Once the concept of thermal pulse-cues was chosen, the initial pulses and patterns were designed with the aid of an original modeling system [25], and an appropriate experimental laboratory setup was fabricated. To achieve the goal of proving feasibility, the tests involved only the researchers, with no additional participants, and included repetitive trials and errors during which the various parameters were adjusted to find the optimal tradeoff for the minimum cue duration and maximum recognizability. The varying parameters are the rate of skin temperature change, or equivalently the amplitude of the stimulating current, the duration of each pulse, and the time interval between pulses in a given sequence composing a cue. The degree of pattern recognition derives from the ability to notice every pulse in the sequence and refer to each one individually, and the ability to distinguish between varying intensities. As to the direction of the pulse, i.e., cooling or warming, due to practical reasons partially explained herein, the tests at this stage involved only cooling pulses. Warmth pulses will be introduced in future research, as separate cues and as combined cues with cooling pulses.
The tests conducted in this study are introductory for a future large-scale experiment with a statistical group of participants, during which the final design shall be determined and reliability verified. The current study is necessary for establishing the format of the thermal patterns that shall be tested. Although these tests are based upon a subjective thermal perception, as sensed and processed by few participants, we believe they were carefully conducted, allowing a significant margin of error, thereby providing a robust prediction of the common response. In any event, the established quantitative patterns will be described with the necessary degrees of freedom to allow further adjustments if necessary, without affecting the qualitative design. The dependent variable in these tests was the human perception and recognizability of the different stimuli, and the independent variable is the thermal stimulus displayed to the skin.
3.1. Apparatus and Test Layout
A Laird Thermal Systems model UT-15-200-F2-4040-TA-WG Peltier thermoelectric cooler (TEC) was used to create the thermal display. One side of the Peltier element served as the display, and the other side was mounted on a thermostatic hot-plate TE Technology CP-200HT using thermal grease to guarantee a full thermal contact between them. The stabilized temperature was maintained by a TC-720 controller using a thermistor to monitor the interface temperature. Another identical thermistor was attached to the hot plate surface at some distance from the TEC, indicating the controlled temperature. The arbitrary signals generator RIGOL DG-1022 was used to form the electrical stimuli, which were delivered to the thermal display via a custom-made current driver designed to amplify the signal with a sensitivity (Iout [A] / Vin [V]) of 1.72[A/V] (see Figure 2). An Agilent 34792a Data Acquisition System with Agilent commercial software was used to process the data for analysis. Temperature change throughout the experiments was monitored at various positions using MP 3176 thermistors (5kΩ, 0.9mm diameter). The thermistors were mounted on the thermal display with layers of Aerogel thermal insulator to thermally isolate the zones of interest (see Figure 3). The complete stationary laboratory layout is shown in Figure 4.
3.2. Procedure
A set of seven different sequences was tested in this feasibility study – see description in Table 1. The number of pulses per sequence was either two or three. A preliminary assumption regarding thermal perception sensitivity to stimulus intensity was made, claiming that the number of different intensities must be limited to two. The evaluated pulses were designed accordingly. During the study, this assumption was slightly corrected, as it was found that in the case of uni-directional intensification, i.e., either increasing or decreasing intensities, as in test # 6 vs. #5 or #7 in Table 1, it is feasible and even preferable to use three intensities.
The participant was first acquainted with the various sequences that were included in the study by using the visualized description and the verbal definition (see Table 1). For every sequence, first, the initial values of the pulses were determined, and applied to the thermal display repetitively every 8s, for a total of several minutes. The participant then rested a given hand on the display, carefully positioning the thenar eminence at the base of the thumb in a natural motion (the pressing force was not monitored), ensuring full skin contact with the display and coverage of the entire area. By this act, the monitoring thermistors mounted on the display (see Figure 3) were inevitably located at their respective functional positions. This position was maintained steady until thermal equilibrium was acquired, which was determined by the readings of the interface thermistors. The steady-state was set to be at approximately 32°C between stimuli, and was achieved by adjusting the stabilized temperature of the hot plate under the back (hot) side of the Peltier TEC.
As steady-state conditions were reached, several additional cycles of the thermal cue were applied and the participant was expected to determine what thermal sensation was perceived. The feedback included reporting answers to two questions: (1) How many pulses did you sense per sequence? (2) Which one of the optional sequences was presented? For tests #3 and #4, the feedback included an answer to an additional question: How do the two duos compare?
This procedure was repeated, first according to the build-up order of appearance in Table 1 and then randomly at four locations per participant – at the thenar eminence and the wrist of each side, while adjusting parameters according to the feedback. As a result of each iteration, further assumptions were laid out and the cues for the next tests were designed in light of them in order to fill the remaining gaps. Finally, the trio sequences - tests #5 through #7 - were applied by the experimenter in random order without notifying the participant (single-blind test) in order to verify unbiased recognition. The tests were also repeated on different days to increase the variance of uncontrolled conditions that influence the thermal perception, such as preliminary skin temperature, mindset, etc. This iterative process kept going as data was gathered and provided more understanding of the borders and thresholds of the recognizability, and the intensities and temporal parameters were adjusted accordingly until recognition was optimized.
3.3. Data Analysis
The data gathered from the experiments included the stimulus specification in terms of the input current and the consequent voltage on the Peltier TEC, the temperature changes monitored at the different locations during exposure to the stimuli, and, finally, the subjective thermal perception reported by the participant that included the icon selection and a verbal description of the thermal sensation. All the iterations were recorded and analyzed. Due to the nature of this evaluation research, data gathering and data analysis were conducted in parallel, with mutual feedback, in an ongoing trial and error type of process (see Figure 5). The experiment was completed when the stimuli temporal and intensity parameters were optimized and a full understanding was reached as to the correlation between stimuli and thermal sensation for the various sequences.
4. Results
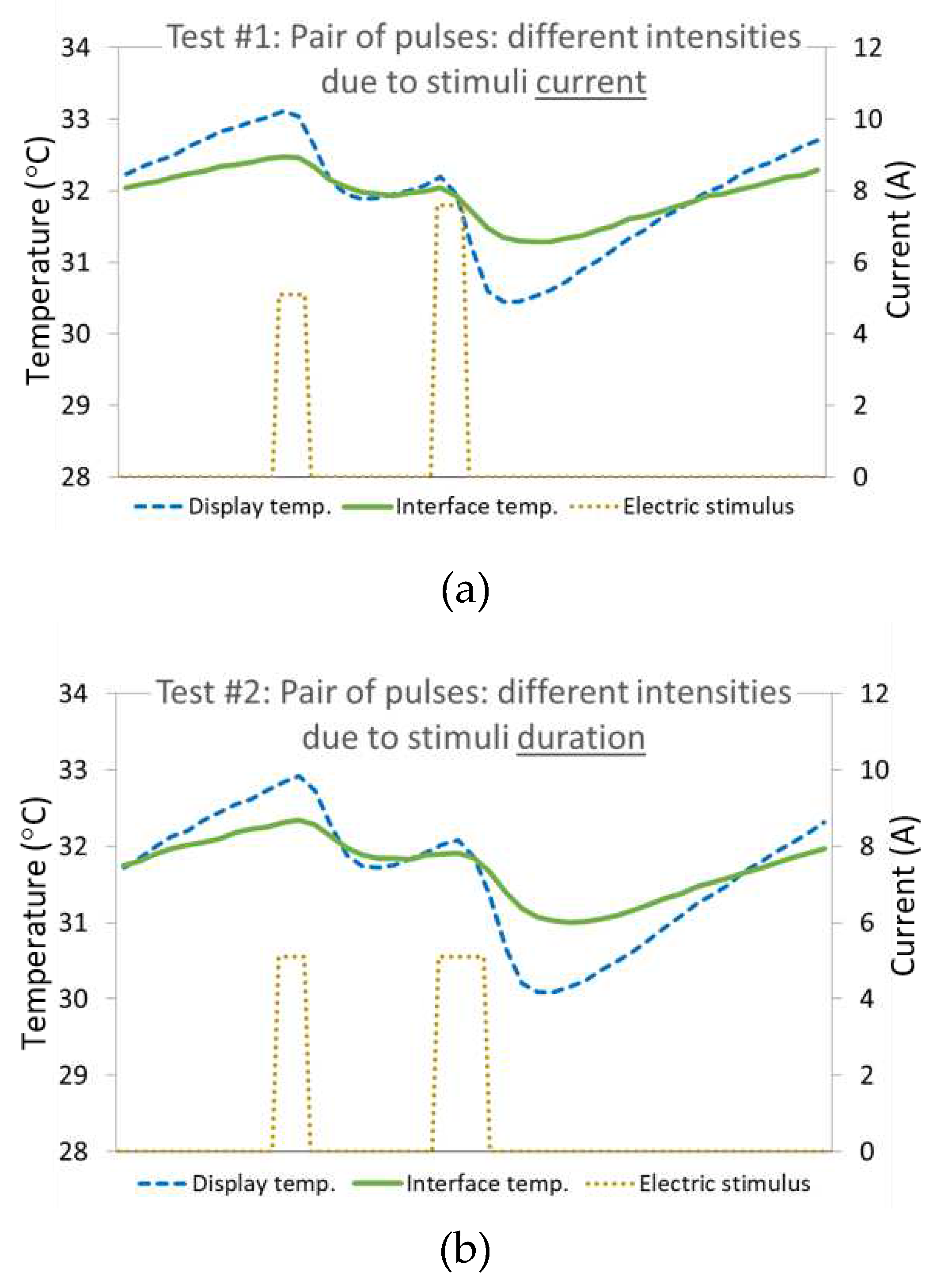
Tests #1 through #4 served to determine the initial characteristics of the pulses to be used for assembling thermal patterns for evaluation. The thermal response to the applied stimuli includes the temperature change presented in Figure 6 along with the thermal perception reported by the participants. The results show that two consecutive cooling pulses of different intensities, applied to the thenar eminence at the base of the thumb or to the wrist, are well noticed and clearly distinguishable (i.e., one can determine which of the pulses was of higher intensity and which of lower) when they comply with the following values:
- Minimal pulse duration: 250ms.
- Minimal ROC at skin-display interface: 1.3°C/s. Corresponds to an input current of 5A when using the existing test setup.
- Intensity ratio between adjacent different pulses (due to duration, input current, or a combination of the two): 1.5.
The two pairs of pulses applied on test #4 were sensed as identical, meaning, a low-intensity pulse followed by a high-intensity one. Despite the fact that the high-density pulses in the two cases were totally different, one had a longer duration but a lower current and the other had a shorter duration but a higher current. This shows that we cannot discriminate between two cooling pulses of similar intensities but different designs. The stimuli chosen for this test were actually the two duos from test #1 and test #2, consecutively. The similarity of the temperature curves in Figure 6a as in Figure 6b correlates with the similarity of the reported thermal sensation. A straightforward test was conducted as well as applying a sequence of the two high-density pulses, and they were sensed as two identical pulses (not presented herein).
The reference to the pulse intensities is in terms of the product of the current amplitude and the stimulus duration, the two factors that determine the amplitude of skin temperature change, and are proportional to the thermal energy delivered to or from the skin by the stimulus.
The final patterns developed via tests #5 through #7 that were found to deliver the desired thermal sensations are presented in Figure 7 and concentrated in Table 2. These tests showed that sequences of three short cooling pulses, with intervals of 1s between them, hence assembling a 2.75s pattern, can be well recognized.
Figure 6.
Temperature change vs. time in response to Duo-stimuli. The stimuli are presented as the electric current applied to the TEC (brown, dotted), the resultant thermal stimulus displayed by the TEC as monitored on the display with isolation from the skin (blue, dashed), and the cutaneous thermal response as monitored at the thermal display-skin interface (green, solid). The graph randomly captures one of the many repetitions of the respective sequence applied periodically every 5 seconds. (a) Results from test #1: A sequence of two pulses with different intensities due to stimuli current – 1st of 5.1A, 2cd of 7.6A. (b) Results from test #2: A pair of successive pulses with different intensities due to stimuli duration - 1st of 250ms, 2cd of 400ms.
Figure 6.
Temperature change vs. time in response to Duo-stimuli. The stimuli are presented as the electric current applied to the TEC (brown, dotted), the resultant thermal stimulus displayed by the TEC as monitored on the display with isolation from the skin (blue, dashed), and the cutaneous thermal response as monitored at the thermal display-skin interface (green, solid). The graph randomly captures one of the many repetitions of the respective sequence applied periodically every 5 seconds. (a) Results from test #1: A sequence of two pulses with different intensities due to stimuli current – 1st of 5.1A, 2cd of 7.6A. (b) Results from test #2: A pair of successive pulses with different intensities due to stimuli duration - 1st of 250ms, 2cd of 400ms.
The results show that the adjacency of pulses impacts the thermal sensation, forcing variations in a pulse's intensity in order to acquire a desired sensation. It was found that the order of appearance in the sequence influences the sensed intensity of a given pulse; it appears that the sensation grows greater as the sequence progresses. This phenomenon is manifested well by the comparison of the trio cues as they were sensed vs. the actual stimuli applied (see Table 2). Several emphasizing examples: On test #5 – the second pulse is intensified relatively to the first pulse, therefore a slight difference in favor of the second one (9.8A vs. 8.4A) is sufficient to create the desired significantly distinguishable difference. The similar second and third pulses on test #6 create the desired sensation of increasing intensity. The first pulse on test #7 required an extra boost for it to be clearly sensed as a high-intensity pulse, therefore the duration was extended to 300ms, and so forth.

Table 2.
Desired Thermal Sensation vs. Corresponding Electrical Stimuli and Skin Response
| Test # | Thermal sensation (Icon) |
Stimulus design (A) |
Thermal response – Skin temperature change (°C) |
|---|---|---|---|
| 5 |  |
 |
 |
| 6 |  |
 |
 |
| 7 |  |
 |
 |
Remarks regarding Table 2:
- (a)
- Clarifying statement: For didactic purposes, it was decided to present the icons with the upward direction indicating a positive cooling sensation, with compatibility to the positive stimuli indicating a positive current applied to the TEC (causing a temperature decrease on the side serving as the thermal display), and counter to the direction of the skin temperature change.
- (b)
- Stimuli temporal parameters: All stimuli included three 250ms pulses (except the first pulse of test #7 that was 300ms) with intervals of 1s.
- (c)
- The stimulus current should be referred to as a relative value since the absolute value derives from the specific test setup.
- (d)
- The presented thermal response includes the three pulses and the recovery to baseline temperature.
To summarize the parameters of a cooling pulse that were found to influence the perception of the thermal intensity when applied to the skin for a given thermal display setup:
- The rate of skin temperature change (ROC), determined by the amplitude of the stimulus current.
- The temporal duration of the stimulus current (which multiplied by ROC determines the amplitude of the skin temperature change).
- The adjacency to a previous pulse intensifies the sensation.
5. Discussion
The results from the series of experiments conducted in this study show high feasibility for developing a generic-data-conveying capability based on thermal sensation. A clear distinction between pulses of different intensities and the recognizability of the different patterns were shown. The patterns that were established are not necessarily the final design ready for implementation, and they definitely do not cover the full variety of pulse-cues that can potentially be developed. Their role was solely to provide a proof of concept. Further work is necessary to design a full set of cues and to determine their reliability. Observing the resulting graphs reveals that practical thermal cues may have a low impact on skin temperature. The temperature drop per pulse was usually a fraction of a degree Celsius starting from approximately 0.2°C, and the total drop for a trio cue was less than 2°C. The skin temperature changes in accordance with the product of the stimulus’ current amplitude (that determines the ROC, the slope in the temperature vs. time curve) and the time duration for which it is applied.
As long as the skin temperature is maintained within the neutral thermal zone (approx. 30-36°C), it is not the nominal skin temperature that determines the thermal sensation, but rather the temperature change. This known physiological fact is demonstrated by the graphs in Figure 7, as the relative intensities of the sensations (indicated by the respective caption) are totally non-correlative to the measured temperature. The graphs also show a temporal delay of approximately 200ms between the stimulus onset and the thermal cutaneous response. We shall expect a longer delay for warm pulses due to the nervous differences [24], hence combining cooling and warming pulses requires special synchronization, adding complexity that is unnecessary at this time. This is the main reason it was decided to include only cooling stimuli in this study.
The following are several interesting issues worth discussion:
5.1. Location in sequence impacts the thermal response to the individual pulse
TECs create a heat flux causing a temperature difference between the two sides that is proportional to the input current. Naturally, this temperature difference does not appear instantaneously, but rather develops in a parabolic type curve starting with a steep quasi-linear slope, and then converges into the designated temperature that corresponds to the given stimulus. (It should be noted that the full temperature difference between the hot side and cold side of the TEC serving as our thermal display is actually approximately double the temperature change displayed, because the hot side does not remain stable when the stimulus is applied, as the thermal response to a dynamic stimulation is evenly divided between the sides. The hot side was monitored and investigated but not shown in this report. See further reference to this issue in the Background section). The time coefficients of the temperature curve depend on the thermal characteristics of the components involved and the magnitude of the stimulus. In our case, the process would last several seconds if the stimuli would extend for that long, but since they continued for only 250ms, the responses appear linear for all practical purposes, with a ROC proportional to the current and a total temperature drop dictated by the pulse duration. The second and third pulses in a trio continue the process of developing a temperature difference (obviously with the respective slope corresponding to the current level). In response to the termination of an electrical stimulus, a thermal recovery process begins, in which the system returns towards the baseline. Due to the shortness of the intervals between pulses, the partial recoveries following the two first pulses of a trio are very limited. Consequently, the sequential pulses are applied at a non-steady-state as thermal display temperature and skin temperature remain close to the resultant respective temperatures caused by the previous pulse. Hence, the location of a given pulse in the sequence of three pulses dictates the initial conditions at which it is applied.
Correspondingly, two findings show that the location in the sequence impacts the thermal response to the individual pulse. One is the increased intensity sensed for a given stimulus magnitude and the other is the consistent reduction in the relative temperature drop caused by a given pulse. Relative temperature drop refers to the nominal temperature drop normalized by the stimulus current. The fact that these findings are contrary to each other (i.e., the temperature change decreases while the thermal perception increases) and yet the first one still affects the results, magnifies it even more than its actual impact. In other words, despite the reduced temperature drop, the sensation is even intensified, indicating that this is a powerful psychophysical phenomenon worth looking into. Observing the thermoreceptor firing (action potential discharge) rates vs. temperature in the range of interest (for this discussion 28-34°C is sufficient) shows that as the temperature decreases, not only does the firing rate increase for the coolness receptors relative to the warmth receptors (which is trivial, for that is the cause of the cool sensation), but the gap is one of exponential growth. This indicates that the sensitivity to changes in temperature increases as the temperature decreases within the range. It should be noted that the varying intensity is well sensed in the case of sequential pulses, for which the recognizability of the pattern is based on relative sensations, whereas for absolute sensation the variations are meaningless. This emphasizes the robustness and relevance of the sequence concept.
The latter finding showing a consistent reduction in the relative temperature drop caused by a given pulse is probably solely a physical outcome of imposing a heat flux in the opposite direction of an existing heat flow of recovery. It can be noticed in any of the plotted temperature trajectories (Figure 7) that all the recovery curves between pulses and between sequences follow a parabolic non-linear growth shape, in which the larger the difference from the steady-state baseline, the greater the slope. In other words, the recovery heat flow becomes more powerful as the gap from baseline increases, and that is why the resultant temperature drop due to a given pulse is reduced as its position in the trio sequence progresses. Incidentally, one can argue as well that the reason for the reduced temperature drop is that the TEC's response to input current is not constant but rather changes in temperature. Yet this cannot be the explanation, because we see that for the range of up to 2°C the variation is negligible. In any event, even if this reduction in temperature change has any impact on the thermal perception, it is compensated for by the adjustments made to the design of the pulses pursuing the desired sensation.
5.2. Pulse duration optimization
A major factor of the research goal was to aim for a minimal duration of thermal cues as a basic condition for effective data transferring capability. Therefore, the values of the pulses found in these experiments refer to the optimal thermal cues in terms of recognizability vs. temporal shortness. Longer pulses would have been even more noticeable and perhaps led to improved recognizability, but the tradeoff limited the duration. A future investigation based on broad experiments may conclude in moving the working point towards slightly longer patterns or vice versa; shortening the duration may become feasible, for instance, by intensifying the pulses with an increased ROC. Furthermore, changing spatial dimensions of the interface by enlarging the thermal display area or adding displays (implementation-scenario dependent) would improve sensitivity and thermal perception and most likely recognizability, and therefore may allow shortening duration. Nevertheless, this work shows the feasibility to base a data transferring capability on thermal cues composed of intense quick pulses and defines a basic design that includes the pulses and the specified thermal display for further research. Applying the results to any other thermal display requires calibration.
5.3. Interval optimization
As discussed in regard to the pulse duration, striving for minimum cue duration with maximum recognizability forced an optimization process on the interval between pulses as well. Several attempts were made until concluding with the interval length of 1s. Figure 8 presents the results from one of these attempts in which the pulses were applied with intervals of 250ms. The sequence failed to deliver the thermal cue needed to create the desired thermal sensation, due to short intervals. The system’s thermal mass blunted the response leaving not enough time for the recovery towards the temperature baseline, thereby almost eliminating the gaps between the pulses. The skin’s thermal mass stalled its response to the displayed cue, thereby negating the remains of the intervals and smoothing the curve.
It should be noted that at this stage of the experiments, the amplitudes of the pulses were directly proportional to the desired sensation (in this specific case, the icon for test #5 – trio LHL). The need to adjust them according to their location in the sequence, as presented in Table 2, was not yet known, and the current experiment did not reveal it because the participants sensed one continuous pulse.
5.4. Intensity optimization
The experiments showed that razing the stimulus electrical current in order to improve noticeability helped only up to a certain extent. The high-low intensity ratio must remain as determined empirically, approx. 1.5, otherwise the low-intensity pulse is at risk of being unnoticed, and therefore it must be razed as well. But since the pattern recognition for sequences of pulses is based on relative sensation rather than absolute sensation, recognizability does not improve significantly once the pulses are intensified enough to be noticed with high reliability. Therefore, the working point determined as the optimal combination was close to the minimal intensity for practical and safety purposes for the experimental phase, as well as for future applicability.
5.5. Temporal sensitivity to pulse-cues
The mechanism used to discriminate between thermal cues is different for the two types of cues: sequences of short pulses as opposed to extended pulses. As mentioned, for sequences of short pulses recognizability is based on the ability to discriminate adjacent stimuli in the sequence. A major factor causing the difference is the characteristics of human thermal temporal sensitivity.
Test #4 shows (by comparing the two graphs in Figure 6 that show the skin response to each of the duos separately) that for short pulses we cannot discriminate between two cooling pulses of similar intensities. That means we do not sense the absolute ROC, but rather discriminate between two different ROCs if they have the same duration resulting in different intensities or total temperature change. Or vice versa, we do not sense the absolute duration, but rather discriminate between two pulses of different durations if they have the same ROC. Specifically, in the discussed cases, one cannot distinguish between events of 250ms and 400ms solely by sensing a difference in duration, since they are both perceived as simply 'short', with blurred temporal starting and ending points. For extended waves, on the other hand, the temporal sensitivity becomes fairly sufficient. In fact, [19,20] evaluated several thermal patterns of 8s duration, showing over 80% accuracy in perceptual discrimination between a step and ramp type waves (referring to the skin thermal response) although both had the same total temperature change. The step started with a relatively short pulse causing a ROC of 1.5°C/s at the skin-display interface, followed by a steady temperature, and the ramp had a ROC of 0.7°C/s with a double duration. In addition, [17,18] showed similar results using even longer cues of 14-16s.
The extended cues are more recognizable in two aspects, temporal sensitivity and heat flow sensitivity. The human thermal perception enables noticing a temporal difference of several seconds but not fragments of the second and the heat energy difference between a step and a ramp of similar duration (the areas under the temperature-time curve). This difference is key for designing thermal cues based on the concept of sequences of short pulses.
The temporal sensitivity limitations are due to the statistical nature of the neural processing of the data accumulated from all the thermoreceptors at the stimulated location [6], as it causes the human thermal sensation to be limited in the ability to identify the precise temporal borders of a stimulus. This can also be teleologically associated with the role the thermal sensation capability fills in assessing body heat loss or gain when exposed to external stimuli.
5.6. Driving current visually reflects thermal sensation
Interestingly, observing the plots in Figure 6 and Figure 7 reveals a strong correlation between the thermal sensation and the electrical current that evoked it, rather than with the consequent thermal stimulus. In other words, the current vs. time curve visually reflects the thermal sensation it causes, excluding the correction applied to the stimulus design by adjusting the pulse intensities according to their location in the sequence (convenient to see in Table 2). Where on the other hand, from the skin temperature change pattern it is difficult to predict the thermal sensation. This can be explained by examining the different recovery behaviors. Thermal recovery from the applied stimulation is a heat transfer process that involves material (the apparatus and the skin) characterized by thermal mass, resistance, capacity, etc. Hence the thermal pattern includes stalled recovery curves: Between cues, a relatively extended recovery curve, and between pulses within a cue, very partial recoveries because they are interrupted at the end of the short intervals, resulting with different starting points for all pulses. This is opposed to the sensation that fully recovers right after the pulse ends, due to thermal adaptation that occurs at these temperatures, and therefore resembles the electrical pulses.
This remark is relevant to cues that are based on sequences of short pulses, but for extended waves the sensation is indeed correlative to the thermal pattern.
6. Conclusions
We have proved the feasibility of conveying information via thermal sensation using cues composed of sequences of quick pulses. The predetermined patterns encoding abstract information are applied to the thermal display, haptically sensed by touch, and decoded. Several sequences of two or three cooling pulses with a total duration of up to 2.75s were designed and tested, having a low impact on skin temperature; nevertheless, they were strongly noticed and clearly recognized. The results indicate that with this concept, a large variety of temporally short thermal cues can be designed to provide recognizability with high reliability. The tests at this time were only conducted on few participants and involved purely cooling pulses. This was sufficient to prove the feasibility and provide the necessary data to proceed to the next stage in the research. This potential capability offers an alternative or complementary channel for various scenarios in which conventional channels, vision, hearing, and tactile sensing are not applicable or not sufficient (e.g., enhance a communication capability for the deafblind, transfer messages in noisy or silent environments).
One of the interesting insights noteworthy in this section, is the comparison of the three graphic expressions related to the thermal cue (see Table 2): The 'icon' representing the thermal sensation, the electric stimulus that evokes the thermal process, and the thermal response representing the physical response of the skin to the stimuli measured by temperature change. It can now be understood that the term 'Thermal Cue' or 'Thermal Pattern' is not sufficient because of the difference between these three patterns. The physical response reflected by the monitored skin temperature change vaguely resembles the perceived thermal sensation represented by the icon. However, the icon has a stronger resemblance to the stimulus design, except for the 'location correction coefficient' by which the magnitudes of the pulses are increased for the second pulse in respect to the first one, and an even greater increase is applied to the third one.
Implementation in future work: To capitalize on the current feasibility study, a broad set of thermal cues should be designed in accordance with the results detailed in this report and a reliability experiment conducted with a large group of participants. Due to different temporal responses [24], combining cooling and warming pulses requires an intelligent synchronization to create the desired thermal sensation with the intended sequence. Furthermore, to enrich the variety of thermal cues and expand the potential domains of applicability, research should focus on three major efforts:
- Better utilizing the space dimension, i.e., enlarging the contact area with thermal displays thereby improving sensibility, and more interestingly varying stimulation locations using wearable items (such as a watch, a bracelet, or an article of clothing formed out of a smart textile) encouraged by recent reports showing a certain level of spatial sensitivity [13,30,31].
- Evaluating additional types of thermal cues, e.g, continuous periodical fluctuation of pulses with varying encoded frequencies.
- Combining thermal cues with other tactile senses to form a full haptic interface, thereby leveraging the relative advantages of each sense and enhancing noticeability and recognizability.6. Patents
Acknowledgments
The authors would like to thank prof. Alon Kuperman, School of Electrical and Computer Engineering, Ben-Gurion University of the Negev, Israel, for his support on the study.
References
- J. L. Sullivan et al., "Multi-sensory stimuli improve distinguishability of cutaneous haptic cues," IEEE Transactions on Haptics, vol. 13, no. 2, pp. 286-297, 1 April-June 2020. [CrossRef]
- N. Dunkelberger et al., "A multisensory approach to present phonemes as language through a wearable haptic device," IEEE Transactions on Haptics, vol. 14, no. 1, pp. 188-199, 1 Jan.-March 2021. [CrossRef]
- Z. A. Zook, O. O. Ozor-Ilo, G. T. Zook and M. K. O’Malley, "Snaptics: low-cost open-source hardware for wearable multi-sensory haptics," 2021 IEEE World Haptics Conference (WHC), 2021, pp. 925-930. [CrossRef]
- J. C. Stevens and K. K. Choo, "Temperature sensitivity of the body surface over the life span", Somatosensory & Motor Research 15.1 (1998): 13-28.. [CrossRef]
- H.-N. Ho, "Material recognition based on thermal cues: Mechanisms and applications," Temperature 5.1 (2018): 36-55.. [CrossRef]
- D. R. Kenshalo, C. E. Holmes and P. B. Wood, "Warm and cool thresholds as a function of rate of stimulus temperature change," Perception & Psychophysics 3.2 (1968): 81-84. [CrossRef]
- I. Darian-Smith, and K. O. Johnson, "Thermal sensibility and thermoreceptors," Journal of Investigative Dermatology 69.1 (1977).. [CrossRef]
- D. R. Kenshalo, "Correlations of temperature sensitivity in man and monkey, a first approximation," in Sensory functions of the skin in primates (pp. 305-330). Pergamon, 1976.
- A. M. L. Kappers and M. A. Plaisier, "Thermal perception and thermal devices used on body parts other than hand or face," IEEE Transactions on Haptics, vol. 12, no. 4, pp. 386-399, 1 Oct.-Dec. 2019. [CrossRef]
- O. Korn, R. Holt, E. Kontopoulos, A. M. L. Kappers, N. K. Persson and N. Olson, "Empowering persons with deafblindness: designing an intelligent assistive wearable in the SUITCEYES project," PETRA 2018: The 11th PErvasive Technologies Related to Assistive Environments (PETRA) Conference. 2018..
- L. A. Jones and H. -N. Ho. "Warm or cool, large or small? The challenge of thermal displays," IEEE Transactions on Haptics 1.1 (2008): 53-70.
- G. Wilson and S. A. Brewster, "Multi-moji: Combining thermal, vibrotactile & visual stimuli to expand the affective range of feedback," Proceedings of the 2017 CHI Conference on Human Factors in Computing Systems. 2017.
- R. L. Peiris, Y. L. Feng, L. Chan and K. Minamizawa, "Thermalbracelet: Exploring thermal haptic feedback around the wrist," Proceedings of the 2019 CHI Conference on Human Factors in Computing Systems. 2019.
- S. Zhao and R. Zhu, "Electronic skin with multifunction sensors based on thermosensation," Advanced Materials 29.15. 2017. [CrossRef]
- T. Maeda and T. Kurahashi, "TherModule: wearable and modular thermal feedback system based on a wireless platform," Proceedings of the 10th Augmented Human International Conference 2019. ACM, 2019.
- J. Tabor, K. Chatterjee and T. K. Ghosh. "Smart textile-based personal thermal comfort systems: current status and potential solutions," Advanced Materials Technologies 5.5. 2020. [CrossRef]
- G. Wilson, S. Brewster, M. Halvey and S. Hughes, "Thermal icons: evaluating structured thermal feedback for mobile interaction," Proceedings of the 14th international conference on Human-computer interaction with mobile devices and services. ACM, 2012..
- G. Wilson, S. Brewster, M. Halvey and S. Hughes, "Thermal feedback identification in a mobile environment," International Workshop on Haptic and Audio Interaction Design. Springer, Berlin, Heidelberg, 2013.
- A. Singhal and L. A. Jones, "Creating thermal icons - a model-based approach," ACM Transactions on Applied Perception (TAP) 15.2 (2018): 14..
- A. Singhal and L. A. Jones, "Dimensionality of thermal icons," World Haptics Conference (WHC), 2015 IEEE. IEEE, 2015.. [CrossRef]
- S. Patwardhan, A. Kawazoe, D. Kerr, M. Nakatani and Y. Visell, "Dynamics and perception in the thermal Grill illusion," IEEE Transactions on Haptics, vol. 12, no. 4, pp. 604-614, 1 Oct.-Dec. 2019. [CrossRef]
- H. -N. Ho, H. M. Chow, S. Tsunokake and W. Roseboom, "Thermal-tactile integration in object temperature perception," IEEE Transactions on Haptics, vol. 12, no. 4, pp. 594-603, 1 Oct.-Dec. 2019.
- C. S. Nam, J. Di, L.W. Borsodi and W. Mackay, "A haptic thermal interface: Towards effective multimodal user interface systems," Proceedings of IASTED-HCI (2005): 13-18..
- H. -N. Ho, K. Sato, S. Kuroki, J. Watanabe, T. Maeno and S. Y. Nishida, "Physical-perceptual correspondence for dynamic thermal stimulation," IEEE transactions on haptics 10.1 (2016): 84-93..
- Y. Y. Shani and S. Lineykin. "Modeling haptic data transfer processes through a thermal interface using an equivalent electric circuit approach," Proceedings of the 14th International Joint Conference on Biomedical Engineering Systems and Technologies (BIOSTEC), 2021.
- D. Ratovoson, F. Jourdan and V. Huon, "A study of heat distribution in human skin: use of Infrared Thermography," EPJ Web of Conferences, 6, 1-8, 2010. [CrossRef]
- F. Xu, T. J. Lu and K. A. Seffen, "Bio-thermo-mechanics of skin tissues," Journal of the Mechanics and Physics of Solids, 56(5), 1852-1884, 2008.
- T. R. Gowrishankar, D. A. Stewart, G. T. Martin and J. C. Weaver, "Transport lattice models of heat transport in skin with spatially heterogeneous, temperature-dependent perfusion," BioMedical Engineering OnLine, 3(1), 42, 2004. [CrossRef]
- J. P. Holman, "Heat transfer, TBS." 10th International e edition (2009).
- J. Tewell, J. Bird and G. R. Buchanan. "Heat-nav: Using temperature changes as navigation cues," Proceedings of the 2017 CHI Conference on Human Factors in Computing Systems. 2017.
- Z. Chen, R. L. Peiris and K. Minamizawa, "A thermal pattern design for providing dynamic thermal feedback on the face with head mounted displays." Proceedings of the Eleventh International Conference on Tangible, Embedded, and Embodied Interaction. 2017. [CrossRef]
Figure 1.
Schematic visualization of the human skin structure - (a) Scheme of the fragment of skin based on [25,27], and (b) Equivalent circuit model of the skin at thermal contact zone based on data from [27,28]. .
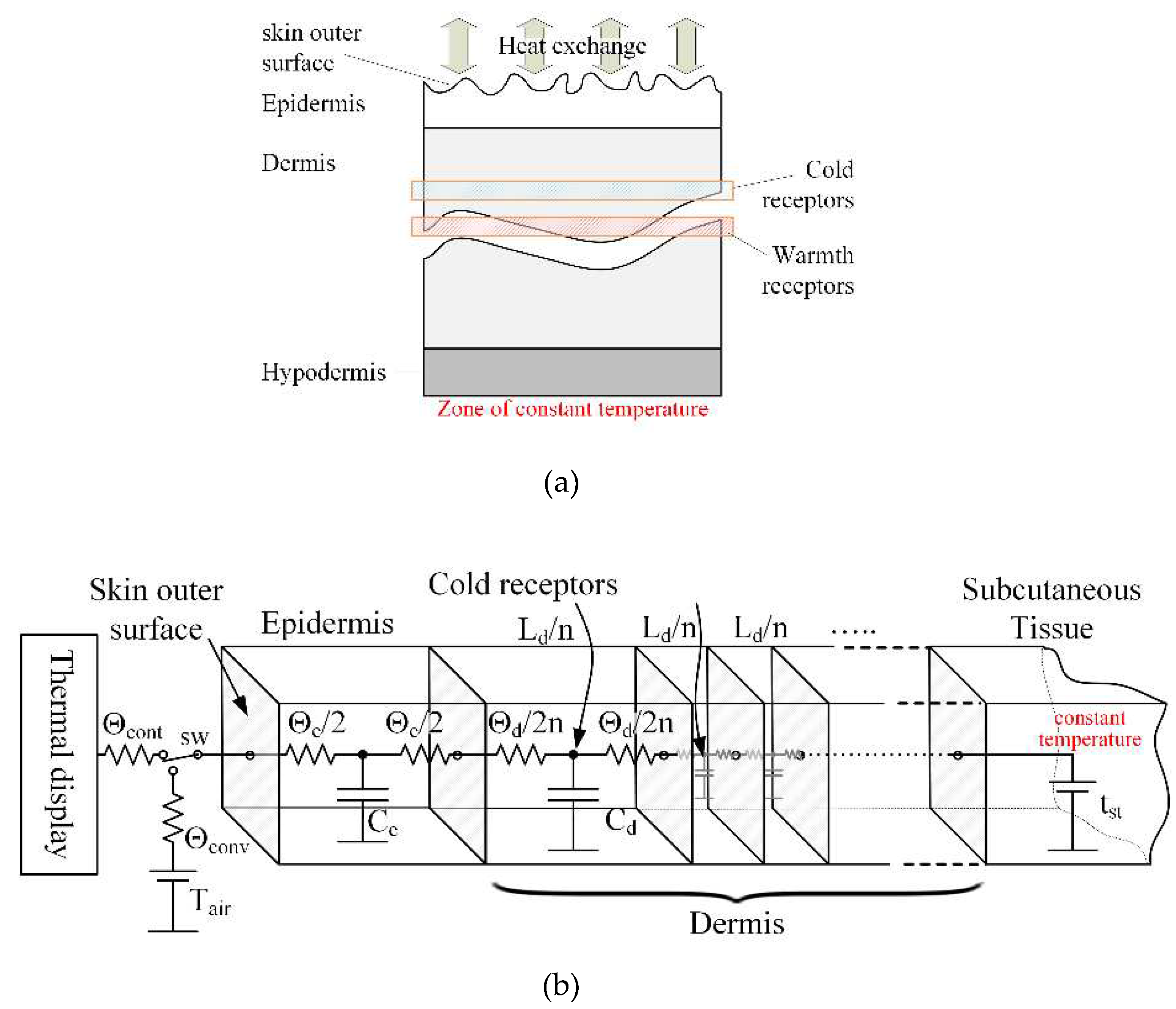
Figure 2.
Scheme of the experimental setup - includes the thermoelectric cooler (TEC), thermostatic plate, thermal insulation, and a current driver.
Figure 2.
Scheme of the experimental setup - includes the thermoelectric cooler (TEC), thermostatic plate, thermal insulation, and a current driver.
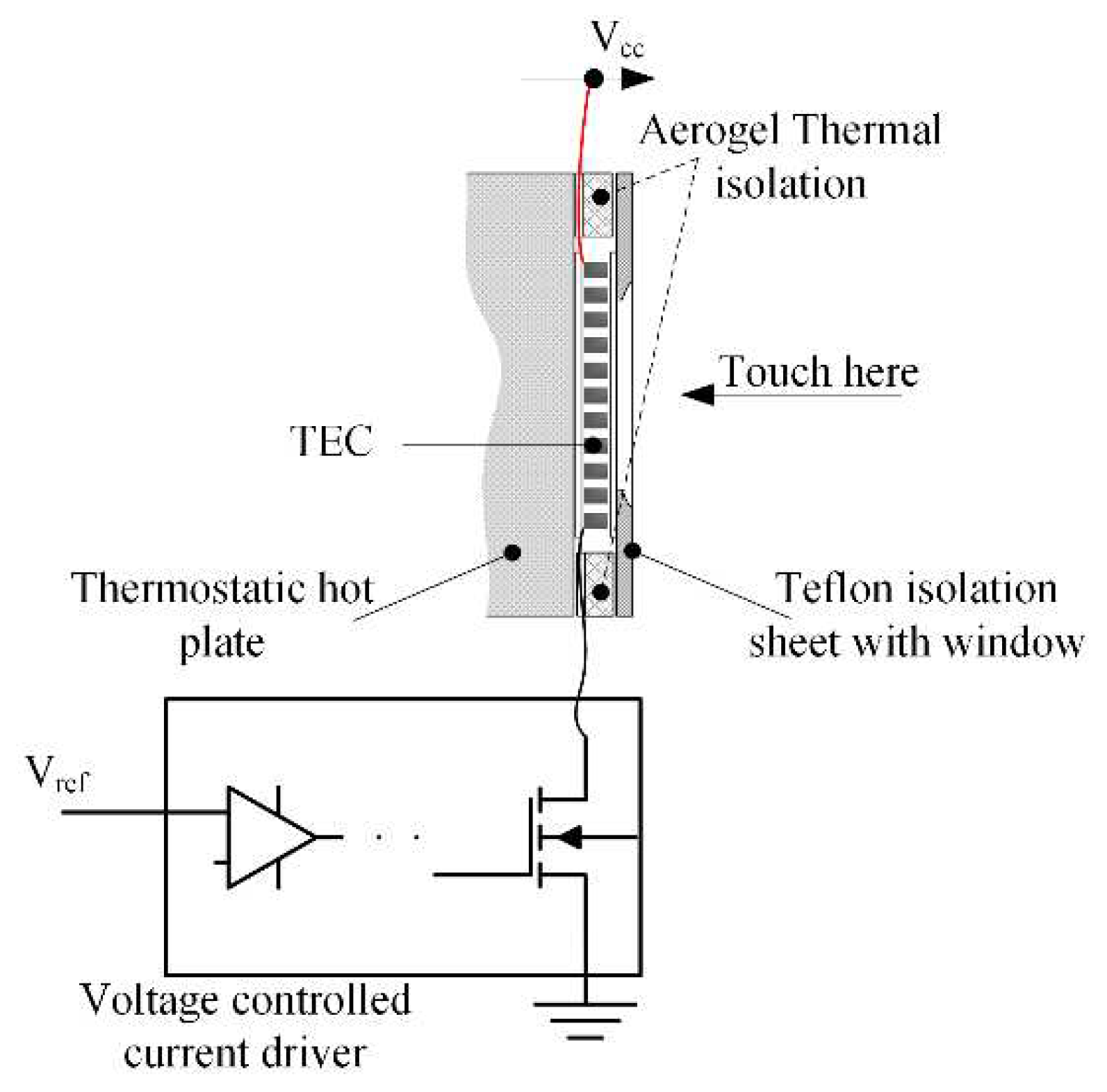
Figure 3.
Scheme of the monitoring thermistors' layout on the experimental thermal display. Thermistor #1 – monitoring the temperature change of the thermal display when thermally isolated from the skin using a layer of Aerogel. Thermistor #2 – monitoring display-skin-interface temperature. Thermistor #3 – Monitoring skin temperature at the contact zone by isolating it from the display.
Figure 3.
Scheme of the monitoring thermistors' layout on the experimental thermal display. Thermistor #1 – monitoring the temperature change of the thermal display when thermally isolated from the skin using a layer of Aerogel. Thermistor #2 – monitoring display-skin-interface temperature. Thermistor #3 – Monitoring skin temperature at the contact zone by isolating it from the display.
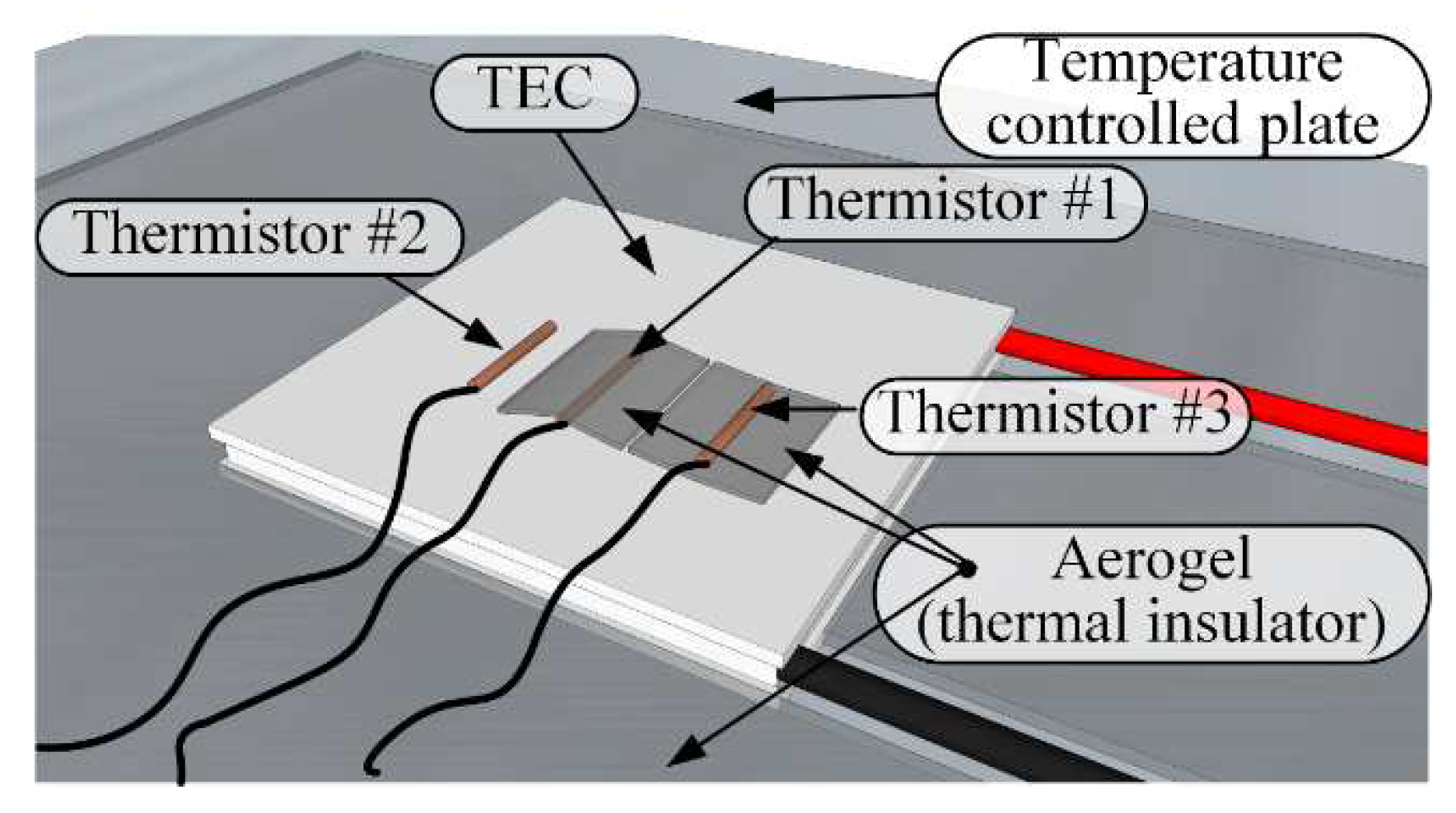
Figure 4.
Laboratory layout – the picture shows (c.c.w. from right): The thermal display placed on the stabilized hot-plate and covered by the participant's right hand, Agilent data acquisition, Rigol signals generator and the current driver that receives the signal from the generator and transforms it to the input current for the TEC.
Figure 4.
Laboratory layout – the picture shows (c.c.w. from right): The thermal display placed on the stabilized hot-plate and covered by the participant's right hand, Agilent data acquisition, Rigol signals generator and the current driver that receives the signal from the generator and transforms it to the input current for the TEC.
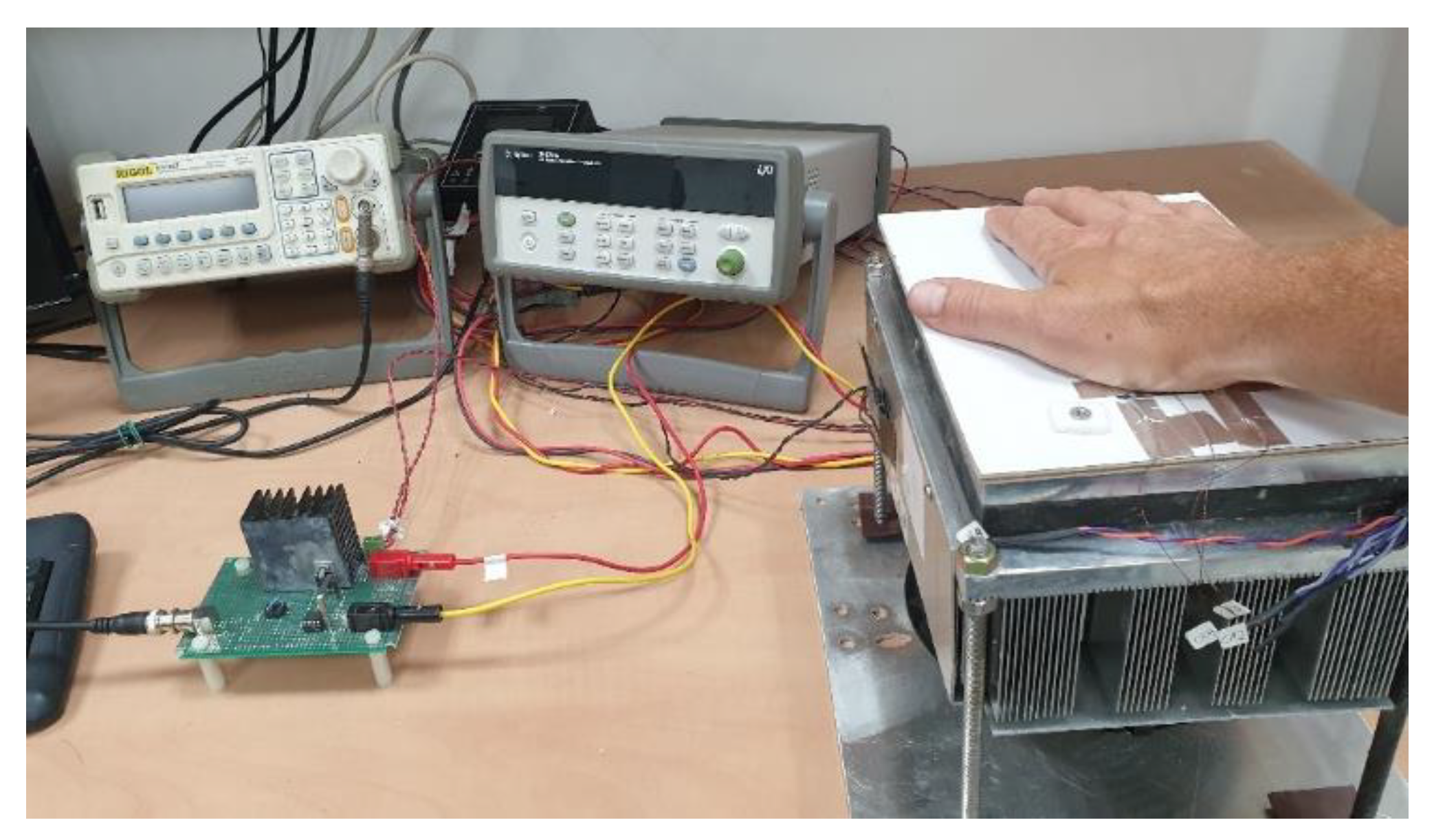
Figure 5.
Illustration of the test procedure and data analysis – the trial-and-error process of correcting the electrical stimulus proceeds until clearly reaching the desired perception.
Figure 5.
Illustration of the test procedure and data analysis – the trial-and-error process of correcting the electrical stimulus proceeds until clearly reaching the desired perception.
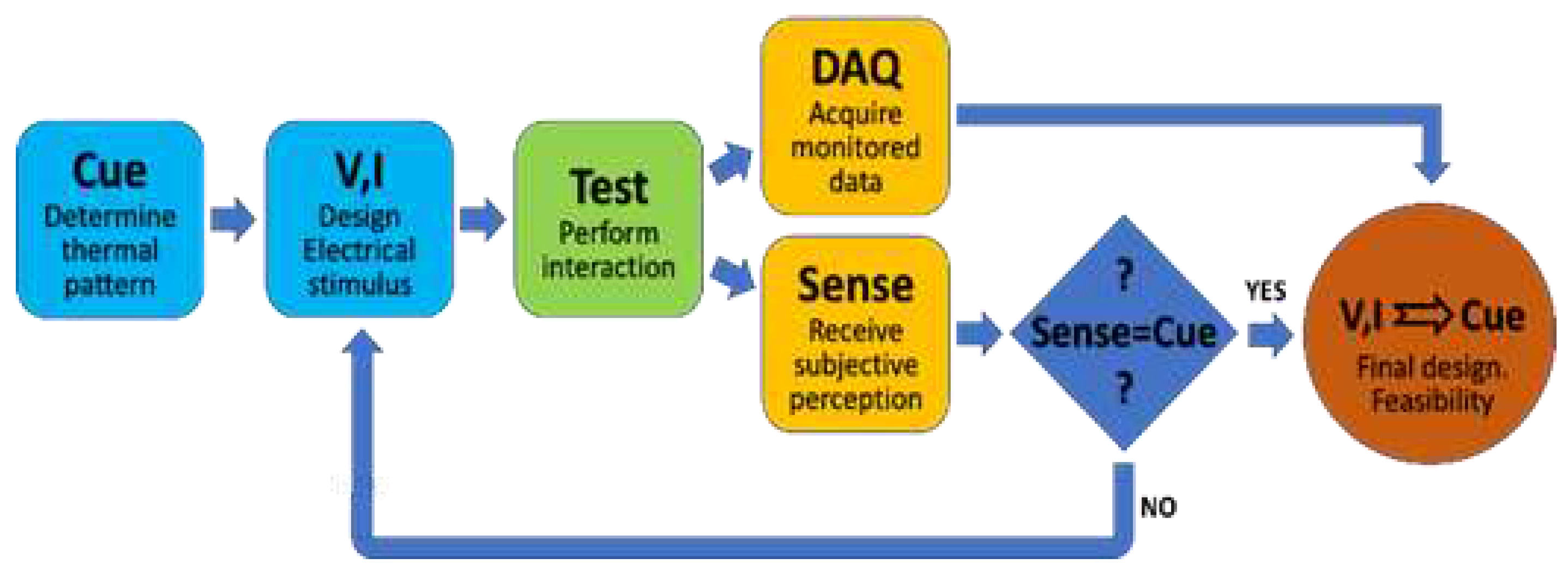
Figure 7.
Temperature change vs. time in response to the Trio-stimuli. The stimuli are presented as the electric current applied to the TEC (brown, dotted), the resultant thermal stimulus displayed by the TEC as monitored on the display with isolation from the skin (blue, dashed), and the cutaneous thermal response as monitored at the thermal display-skin interface (green, solid). The graphs randomly capture two of the many repetitions of the respective sequence applied periodically every 8 seconds. Three temperature drops are clearly viewed, each followed by a recovery attempt that is abruptly terminated by the consecutive pulse. The recovery curve after the third pulse is longer, naturally, and is stopped by the first pulse of the consecutive sequence, thereby defining the steady-state thermal equilibrium for the specific sequence. (a) Results from test #5 – LHL trio. (b) Results from test #6 – LMH trio. (c) Results from test #7 – HLH trio.
Figure 7.
Temperature change vs. time in response to the Trio-stimuli. The stimuli are presented as the electric current applied to the TEC (brown, dotted), the resultant thermal stimulus displayed by the TEC as monitored on the display with isolation from the skin (blue, dashed), and the cutaneous thermal response as monitored at the thermal display-skin interface (green, solid). The graphs randomly capture two of the many repetitions of the respective sequence applied periodically every 8 seconds. Three temperature drops are clearly viewed, each followed by a recovery attempt that is abruptly terminated by the consecutive pulse. The recovery curve after the third pulse is longer, naturally, and is stopped by the first pulse of the consecutive sequence, thereby defining the steady-state thermal equilibrium for the specific sequence. (a) Results from test #5 – LHL trio. (b) Results from test #6 – LMH trio. (c) Results from test #7 – HLH trio.
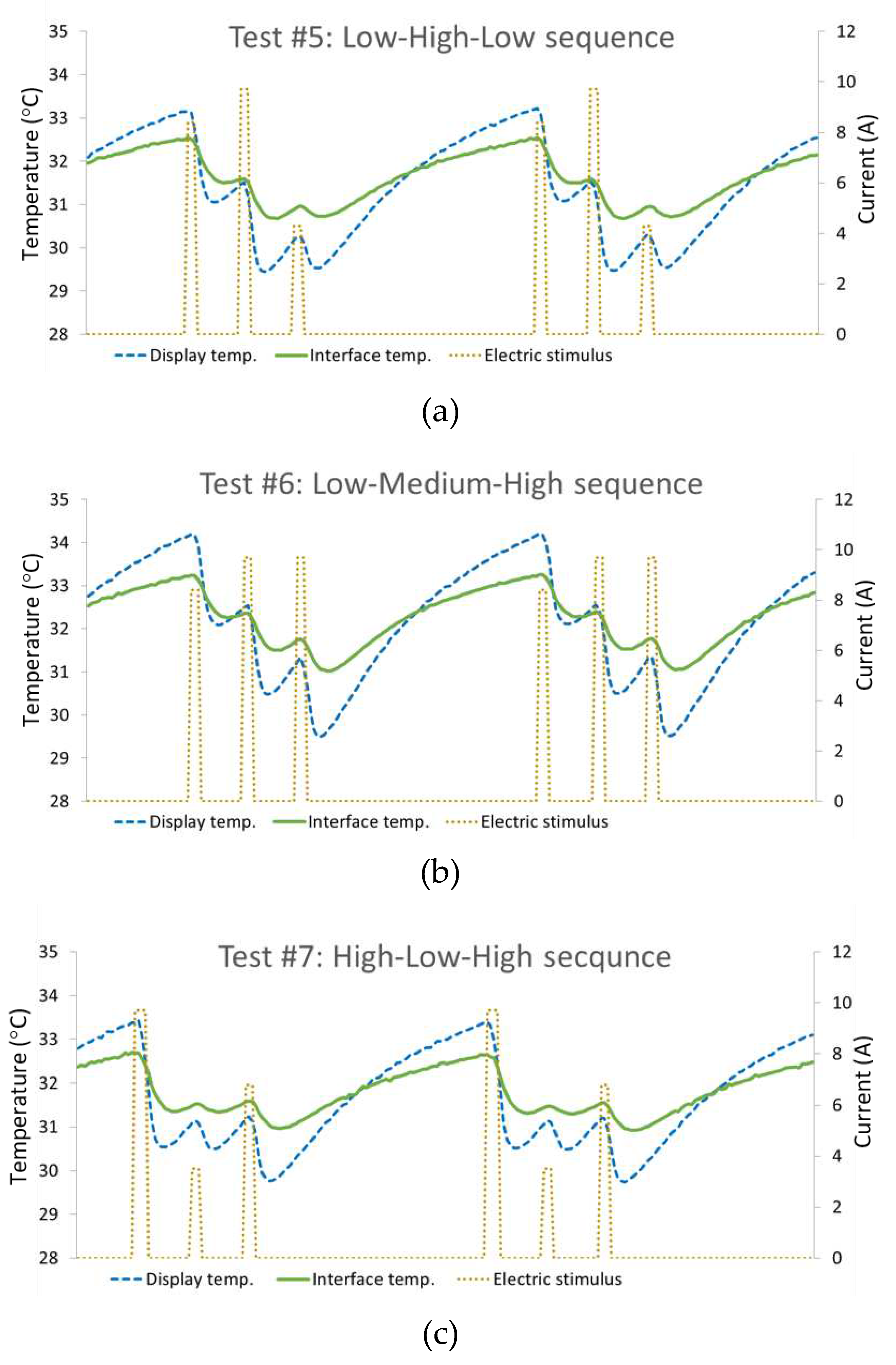
Figure 8.
Temperature change vs. time in response to a trio-stimulus attempting a Trio LHL (test #5) with small intervals. The thermal display temperature change (blue, dashed) delivered one continuous cooling wave with minor hints of pulses diverting the curve, and the skin temperature at contact (green, solid) shows total indifference to the pulses.
Figure 8.
Temperature change vs. time in response to a trio-stimulus attempting a Trio LHL (test #5) with small intervals. The thermal display temperature change (blue, dashed) delivered one continuous cooling wave with minor hints of pulses diverting the curve, and the skin temperature at contact (green, solid) shows total indifference to the pulses.
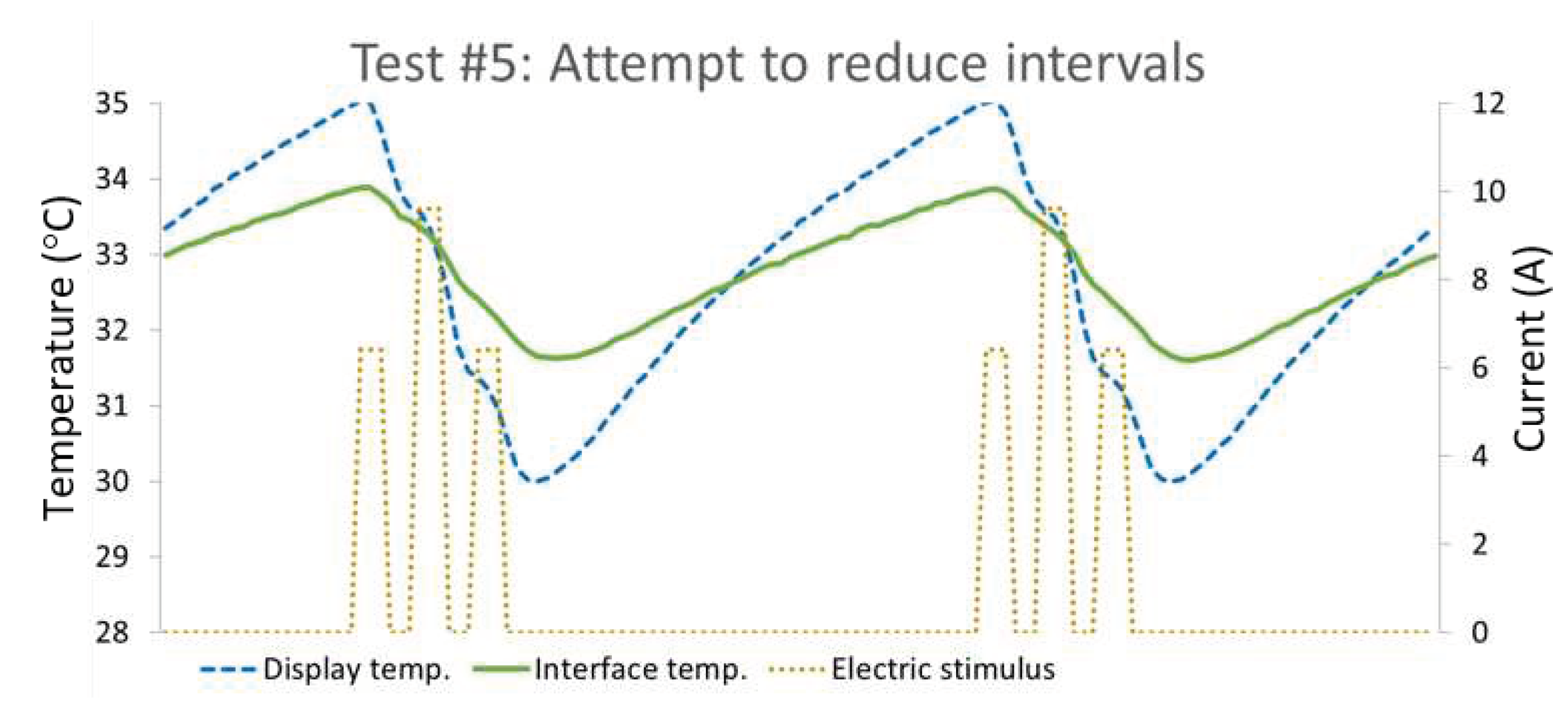
Table 1.
Description of Tested Patterns
| Test # | Sequence definition | Icon* |
|---|---|---|
| 1 | Duo-Current - a sequence of two pulses with different intensities (first Low and second High intensity), due to stimulus current |
 |
| 2 | Duo-Duration - a sequence of two pulses with different intensities (first Low and second High intensity), due to stimulus duration |
 |
| 3 | Pair of Duos - a pair of successive duos, one of identical pulses, the other of different intensities |  |
| 4 | Pair of Duos - a pair of successive duos, both of different intensities, one due to stimulus duration, the other due to stimulus current |
 |
| 5 | Trio LHL - a sequence of three pulses with different intensities due to stimulus current - first Low intensity, second High, third Low |
 |
| 6 | Trio LMH - a sequence of three pulses with different intensities due to stimulus current - first Low intensity, second Medium, third High |
 |
| 7 | Trio HLH - a sequence of three pulses with different intensities due to stimulus current - first High intensity, second Low, third High |
 |
* The icons are intuitive graphic qualitative expressions of the patterns that refer to the corresponding thermal sensations. Note that the upward pulses indicate a positive cooling sensation counter to the direction of the temperature change.
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



