Submitted:
05 July 2023
Posted:
06 July 2023
You are already at the latest version
Abstract
With the development of artificial intelligence technology, manipulators, as an important part of the work of intelligent robots, can replace humans to perform various complex tasks. In recent years, there have been many studies on the remote control of manipulators using various control technologies. Starting from the manufacturing materials of flexible sensors used for manipulators, this paper introduces the base materials, sensing materials, and flexible electrode materials of flexible sensors, respectively, and summarizes the performance of flexible sensors made based on the characteristics of different materials. The basic principles of dipping and coating, lithography, inkjet printing, screen printing, 3D printing and so on are introduced from the perspective of flexible sensor manufacturing process. Some different functions of sensors achieved by different structural designs, such as: tensile cracking, microchannels, etc. are also introduced. Then, from the perspective of recognition accuracy of the manipulator, two kinds of control methods based on flexible sensor by data glove control and surface EMG control are classified and introduced, and the problems existing in three aspects of flexible sensor material preparation, manufacturing process and control series design are summarized. Finally, the possible future research directions in this field are suggested.
Keywords:
manipulator control
; flexible sensor
; manufacturing process
; gesture recognition
; EMG control
; data gloves
1. Introduction
Robots have gradually played an important role in machine manufacturing, electric power, nuclear industry, metallurgy, light industry and other fields. As a kind of mobile robot, the remote control of manipulators has been widely studied by scientists, a manipulator is a device that can imitate the actions of human hands to grasp, carry objects or operate tools [1]. Traditional remote control can be based on machine vision technology, which captures people’s hand movements through the camera, uploads the images or videos to the computer for analysis and processing, obtains the hand movement information and sends it to the manipulator to perform corresponding actions, completes gesture recognition and tracking [2,3,4]. However, the problem with this method is that it is greatly affected by environmental factors such as light. Compared with the control method based on vision technology, the control method based on flexible sensor technology through data glove [5] or through electromyography (EMG) [6] is more widely used. This method has a higher detection accuracy and a stable information collection process.
Flexible sensors are skin-friendly, flexible and comfortable, and can be easily worn directly on human hand joints, arms or palms, and can directly collect and identify information related to changes in human hand movements. In view of this, the use of wearable flexible sensors to collect human hand information and control the movement of the manipulator has become a hot research topic. It is widely used in fruit and vegetable picking, medical rehabilitation, assistance for the elderly and disabled, and hazardous electrical work. For example, the Toshiba smart hand designed by Suzumori et al. [7], shown in Figure 1a, is capable of grasping, moving objects and screwing with good flexibility. The soft hand claw developed by Hao et al. [8] can adjust its effective length according to the size and shape of the grasped object, as shown in Figure 1b. Muscato et al. [9] developed a citrus soft picker with a spiral arrangement of rubber plates, as shown in Figure 1c. After grasping the citrus fruit with three fingers, the robotic arm moved back to clamp the fruit stem to enter the cutting area. The human exoskeleton developed by Wege et al. [10], shown in Figure 1d, is specifically designed for medical applications and supports all four degrees of freedom of all fingers. The device can be easily connected or adjusted to form a deformed hand that is controlled by EMG with sufficient accuracy.
As shown in Figure 1e, Wang et al. [11] proposed a simplified model to simulate a fluidic elastomer actuator (FEA) and used three-dimensional (3D) printing technology to fabricate a three-finger soft manipulator and conduct the experiments. In 2010, Tadano et al. [6] fabricated a hand exoskeleton using pneumatic rubber muscles, as shown in Figure 1f. With a total of 10 degrees of freedom, the grasping action was completed by EMG control. The hand-assisted rehabilitation system designed by Ito et al. [12], as shown in Figure 1g, can realize independent and fine auxiliary movements of different mechanisms, especially the assistance of individual fingers. Surface EMG signals are collected from the user’s arm to control the limb for rehabilitation movement. Fontana et al. [13] proposed a novel haptic exoskeleton (HE), as shown in Figure 1h, which can realize the movement of the index finger with three degrees of freedom, allowing the operator to control the fingertip and thumb, resulting in mechanical feedback when the finger grasps the object. Spiers et al. [14] proposed a hybrid approach to haptic classification and feature extraction using a simple underactuated manipulator during a single grasp, as shown in Figure 1i. Such hands provide a practical robotic grasping solution that is easy to implement. The proposed approach can be extended to other robotic hands with alternative sensing and actuation, making adaptive grasping feasible. Nowadays, the control methods of manipulators are becoming more widespread, the control methods are becoming more advanced, and the functions that can be achieved are becoming more powerful, creating the conditions for close cooperation between manipulators and humans.
With the progress of science and technology, the remote control of manipulators has gradually become the main research direction of manipulator development. On this basis, the development of flexible sensors is also driven in this direction. Flexible sensor is one of the basic components of portable devices. It is made of various flexible materials, and it is a sensing device that can collect the measured information and convert the measured information, such as the large amount of elastic strain [15], etc., into electrical signals or other signals. Due to the continuous development of manufacturing materials, the continuous progress of manufacturing processes, and the increasing maturity of flexible sensor technology, the flexible sensor designed for manipulator control has higher sensitivity and stronger stability. The literature growth trend of manipulator control research based on flexible sensor technology over the years is shown in Figure 2.
Although a lot of research has been done in this field in recent years, the current research on manipulator control based on flexible sensor technology mainly has problems such as high difficulty, sensitivity, detection accuracy and low control stability. In order to solve these problems, the relevant research is mainly carried out by improving the design scheme, upgrading the preparation materials and optimizing the process flow. Through the design of microchannel and microstructure, the flexible sensor with higher sensitivity, faster response and more stable operation will be produced. Strengthen the research of some preparation materials, and improve the control sensitivity and stability of flexible sensors by improving the properties of materials. The process directly determines the quality of the design products, and the exploration, improvement and promotion of the process level is also an important issue that needs continuous research.
In view of the above problems, this paper summarizes the literature related to the manipulator system based on flexible sensor technology. The main contributions mainly include the following aspects:
(1) Summarize the production materials and processes, analyze the advantages and disadvantages of different materials, and list the use of materials in previous studies, provide references for material selection in subsequent studies in this field, summarize the principles and characteristics of traditional processes and emerging 3D printing technologies, and provide a theoretical basis for the selection of appropriate preparation processes;
(2) From the two aspects of data glove control and surface EMG control, summarize the literature on manipulator interactive control and list the detection accuracy under different sensor materials and algorithms, and provide an overview for subsequent relevant research in this field.
(3) To summarize the existing problems from the three aspects of material, process and control, respectively, to provide directions for future research in this area.
The remaining contents of this paper are as follows: The second part mainly introduces the components of the flexible sensor, the types of manufacturing materials of each module and the manufacturing process of the flexible sensor; The third part introduces two different types of manipulator control based on flexible sensor technology; The fourth part summarizes the problems from different aspects. Finally, the paper summarizes the whole text and looks forward to the future research of manipulator control.
2. Materials and processes for manufacturing flexible sensors
Comfort, stretchability, skin affinity and micro are the important characteristics of wearable flexible sensors. The selection of flexible materials with high stretchability and good electrical conductivity is crucial for flexible sensors. Different flexible sensors use different materials, but the whole consists of three components: substrate material, sensing material and flexible electrode. There are many methods for manufacturing flexible sensors, such as dipping and coating, lithography, inkjet printing, screen printing, etc. The following is a brief introduction from the two aspects of materials and processes.
2.1. Materials
As shown in Figure 3, commonly used substrate materials are mainly polydimethylsiloxane (PDMS), polyimide (PI), thermoplastic polyurethane (TPU)and other polymer materials such as paper; sensing materials are carbon-based nanomaterials (CBN), such as carbon-based nanoparticles, carbon nanotubes (CNT), graphene (GO); conductive materials are generally CNT, GO, metal nanomaterials, organic polymers and so on.
2.1.1. Substrate material
The flexible substrate is an indispensable part of the flexible pressure sensor. In order to meet the requirements of the flexible sensor, the properties of flexibility, corrosion resistance, stability, thin and light have become the key indicators for the selection of the flexible substrate. Commonly used substrate materials are mainly polydimethylsiloxane (PDMS) [17,18,19,20], polyimide (PI) [21,22], thermoplastic polyurethane (TPU) [23,24,25,26,27,28] and other polymer materials such as paper, each of which has great application potential in the fabrication of flexible sensors with different functions.
PDMS, as the most commonly used flexible substrate material, has been widely used by researchers in electronic skin, flexible circuit, superhydrophobic surface, microfluidic chip [29,30,31] and other fields due to its easy availability, low modulus, strong mechanical compliance, non-toxicity, extremely high tensile property, good biocompatibility and, most importantly, customizable surface chemistry [32]. Ordinary PDMS elastomers have limited stretchability, adhesion and flexibility, and can be improved to have better properties by some physical or chemical treatment of the material. By modifying the morphology of the PDMS microstructure, Zeng et al. [16] fabricated a highly sensitive flexible pressure sensor with a sensitivity of 14.26 kPa-1 and a response time of less than 50 ms, as shown in Figure 4a.
As shown in Figure 4b, Cai et al. [33] proposed a self-powered tactile sensor based on PDMS/MXene. The best sensitivity reaches 0.18V /Pa at 10-80 Pa and 0.06V /Pa at 80-800 Pa, respectively, higher than most other self-powered tactile sensors, the different sensitivity under low and high pressure is related to wrinkles. It can be used to monitor complex human physiological signals, showing great potential for disease detection and health assessment. By using liquid metal EGaIn as the conductive layer and PDMS-MPU0.4- IU0.6 as the encapsulation and support layer, Kang et al. [34] fabricated a new class of stretchable and autonomous self-healing electrodes, which show great improvement in toughness, stretchability and stability, as shown in Figure 4c. Similarly, Li et al. [39] designed a new polymer chain based on PDMS by introducing iron complex bonds, which gives the elastomer excellent ductility and self-healing properties, and can be used as a support material for self-healing artificial muscle actuators. Jeong et al. [19] demonstrated a simple method to adjust the mechanical compliance, elongation at break and adhesion to human skin of PDMS by adding different amounts of ethoxylated polyethyleneimine (PEIE) additives to the mixture of silicone base and crosslinker of the PDMS-based elastomer, and then fabricated a flexible electronic device for detecting finger movements, as shown in Figure 4d.
Polyimide (PI) has excellent thermal stability, its chemical properties can remain stable in the range of -240°C to 260°C, although PI material is not malleable, but it can be bent, excellent mechanical properties and corrosion resistance, is an ideal material for flexible sensor substrate. In 2018, Kim et al. [40] fabricated a nanocrack sensor on PI substrate by stretching method, which has high sensitivity to strain and low response (the strain coefficient exceeds 10000 and the response time is only 5 ms at 2% strain), and has good application potential in motion monitoring, as shown in Figure 4e.
Polyurethane (PU) can be used in the manufacture of flexible sensors, which has the properties of temperature resistance, wear resistance, high strength and elasticity, and can provide good ductility for flexible sensors. As shown in Figure 4f, Wang et al. [35] fabricated a highly sensitive strain sensor by embedding TPU fiber film in carbon black (CB) particles with the adjustable support network, which has broad application prospects in intelligent terminal, electronic skin, voice measurement, human motion monitoring, etc. Zhou et al. [36] designed a stretchable strain sensor with a cracked structure by spraying CNT ink coating on TPU fiber mat. The sensor can detect subtle and wide range of human motion with its excellent sensitivity and good stability, as shown in Figure 4g.
In addition, polyethylene terephthalate (PET) is also one of the commonly used polymers for manufacturing flexible sensors, which has good flexibility, excellent electrical insulation and can maintain stable physical properties over a wide temperature range, but its heat resistance is inferior to PI. In some special applications of flexible sensors, paper, some synthetic textiles are also a suitable choice as the base material of flexible sensors. Liu et al. [37] fabricated a flexible and degradable paper-based strain sensor by dip-coating the paper substrate in an aqueous suspension of carbon black (CB) and carboxymethyl cellulose (CMC), as shown in Figure 4h. It has high stability and can be used to monitor various human movements. Hamedi et al. [41] have demonstrated an engineering fabric that overcomes the five limitations of non-interconnection of printed conductors, slowing of water-based fluid flow, limited surface area of paper, poor contact adhesion and stability, and blocking of holes in paper by fabricating circuits and microfluidic structures on paper. Hu et al. [38] used single-wall carbon nanotube (SWNT) inks to fabricate highly conductive textiles by an extremely simple “dip and dry” process, which exhibited excellent flexibility and stretchability, as shown in Figure 4i. Based on these flexible substrate materials, the flexible sensor has the characteristics of softness, stretchability, bendability, wearability, etc., and is widely used in smart textiles to stabilize and integrate multifunctionality beyond clothing [42].
2.1.2. Sensor material and flexible electrode
The materials used for the sensor and the flexible electrode are very similar. The sensing material is one of the key materials of the flexible strain sensor, which can convert the external pressure/strain signal of the sensor into an electrical signal. In recent years, researchers have generally fabricated flexible strain sensors with good mechanical properties based on CBN. CBNs include carbon-based nanoparticles, CNT, GO, etc. CBNs are the main materials for fabricating flexible electrodes due to their unique electrical properties and good piezoresistive sensitivity. Flexible electrodes are an important part of flexible sensors and are developed from various conductive materials. Currently, the main materials are not only CBN, but also metal nanoparticles. Carbon materials have special electrical conductivity and structural diversity, overcoming the inherent performance limitations of traditional transparent electrode materials. Gold and silver in metal particles are commonly used as flexible electrode materials for wearable sensors. In addition, there are some emerging materials such as organic polymers, liquid metals, ionic hydrogels, etc.
Carbon nanotubes (CNT), as one of the new materials with great potential, have excellent properties such as light weight, good conductivity and high surface utilization due to their perfect hexagonal interconnection structure. The tube diameter of CNT is controllable, and it can be applied to the production of large-area, low-cost flexible sensors through simple processing and synthesis. The mass-produced carbon nanotubes are compatible with large-area solution processing technology, and carbon nanotubes can be directly deposited on flexible materials or stretchable substrates, and are widely used as electrode materials for flexible strain and pressure sensors [43]. Lipomi et al. [44] reported a type of skin-like pressure and strain sensors based on transparent elastic films of CNTs, which can be made stretchable by applying strain along each axis and then releasing the strain. Jung et al. [45] fabricated a dry ECG electrode based on CNT/PDMS composites that can be easily connected to conventional ECG devices and demonstrated its long-term wearable monitoring capabilities as well as its robustness to motion and sweat. Highly ordered arrays of CNTS exhibit superior electrical conductivity. Paul et al. [46] designed a vertically arranged carbon nanotube (VACNT)/PDMS composite structure as the sensing material of the stretchable sensor, as shown in Figure 5a. The sensor has excellent strain deformation ranging from 0.004% to 30%. Boutry et al. [47] fabricated a bionic electronic skin formed by CNT top and bottom electrodes embedded in a PU elastic substrate, which has excellent electrical stability when mechanical deformation is applied, can control the robotic arm to perform various tasks, and can measure and discriminate forward and tangential pressures in real time.
Graphene (GO) has the characteristics of thin and transparent, good electrical and thermal conductivity, and is a very promising flexible strain sensor material. Graphene has two preparation methods: chemical vapor deposition method and natural graphite stripping method. The graphene prepared by chemical vapor deposition method [56] may have insulating impurities during the preparation process, resulting in poor electrical conductivity. Tolerable strain is usually less than 1%. The graphene prepared by the natural graphite stripping method has the advantages of large-scale production and low cost, which is more conducive to practical application [57,58,59]. As shown in Figure 5b, by transferring the obtained 3D-GFs to a flexible PDMS substrate, a reversible change in resistance under large strain or bending was achieved by Pan et al. [48]. The highly sensitized piezoresistive strain sensor can produce a rapid response to finger bending. Polat et al. [49] used graphene sensitized by semiconductor quantum dots (GQDs) to construct a photosensitive wearable sensor for the material, and a number of prototypes are presented for monitoring key physiological characteristics, including heart rate, arterial oxygen saturation (SpO2), and respiratory rate, as shown in Figure 5c.
Reduced graphene oxide (rGO) has been widely used in the fabrication of flexible sensors due to its excellent electrical conductivity, good mechanical properties, and ease of processing [60,61,62,63]. Du et al. [64] uniformly coated the reduced graphene oxide on the surface of NWF to prepare a graphene-NWF (GNWF) flexible sensor, which has good reproducibility in response to stretching, bending and compression, can respond to a series of human movements of different degrees, and can monitor finger, wrist and other parts of the pulse, breathing and other small movements. By Lu et al. [50], rGO and PDMS were deposited on the substrate to form the highly conductive piezoresistive pressure sensor after thermal reduction treatment. The assembled pressure sensors had excellent sensing characteristics and successfully detected various physiological activities and subtle physiological signals, including walking, running, elbow bending, finger bending, breathing, speeking, and blood pulse, as shown in Figure 5d. By mixing tissue paper with GO solution, and converting the GO sample into reduced graphene oxide (rGO) paper by thermal reduction method, a graphene paper pressure sensor with excellent performance in the range of 0- 20 kPa is obtained by Tao et al. [51], which can be applied in pulse detection, breathing detection, voice recognition, as well as various intense motion detection. As shown in Figure 5e, a dry and self-adhesive strain sensor consisting of a sensing layer and an adhesive layer has been fabricated by Wang et al. [52]. The sensing layer is made of non-adhesive WPU composites of rGO and CNTs. The adhesive strain sensors are used to monitor body movements with large or small strains, including movements of fingers, wrists, knees, ankles and muscles, as shown in Figure 5f.
Compared to carbon-based materials, metal nanomaterials have unrivaled electrical conductivity. In 2019, Li et al. [65] fabricated a pressure sensor based on micro-nanowires densely stacked with gold nanoparticles using the imprinting method. The entire assembly process takes only 1 minute, the optimal detection limit of the pressure sensor is as low as 25 Pa, and it can be applied to any part of the human body. Its high sensitivity ensures its application in real-time monitoring of daily human motion and as an electronic skin for prosthetics. Kim et al. [53] demonstrated a flexible and transparent sensor fabricated by mask-less laser processing of Ag nanoparticles and spray coating of Ag nanowires, as shown in Figure 5g, capable of sensing both pressure and position. Zhao et al. [66] combined the natural viscoelastic material of thermoplastic polyurethane (TPU) nanofibers with the conductive material of silver nanowires (AgNWs) to fabricate a capacitive pressure sensor with the characteristics of high sensitivity, fast response time and low detection limit. Choi et al. [54] used a selective patterning process to embed stretchable and transparent silver nanowire/reduced graphene oxide (AgNWs/rGO) electrode wires into a polyurethane (PU) dielectric layer on the PDMS substrate. A transparent stretchable capacitive touch sensor is fabricated as shown in Figure 5h. The stretchless touch sensing function of this sensor has great potential in wearable electronic devices and human-machine interfaces.
Organic polymer materials, another conductive material for flexible tensile sensors after carbon nanomaterials and metal nanomaterials, have gradually become one of the best raw materials for the fabrication of components in the field of sign language gesture recognition due to their unique properties. A flexible piezoelectric haptic sensor array based on polyvinylidene fluoride (PVDF) film was proposed by Yu et al. [67] to measure the triaxial dynamic contact force distribution. The array consists of six tactile units. In each unit, a PVDF film is sandwiched between four square top electrodes and one square bottom electrode, forming four piezoelectric capacitors to measure pressure changes. Due to their excellent flexibility, the sensor arrays can be easily integrated into curved surfaces, such as robotic and prosthetic hands. Rahimi et al. [55] presented a highly stretchable, flexible piezoresistive strain sensor by transferring and embedding the carbonized pattern produced by laser carbonized polyimide into an elastomeric substrate (such as PDMS or Ecoflex), whose performance far exceeds that of many other previously reported piezoresistive conductive composites and conductive particle films. It can be attached to a latex glove to monitor finger flexion angle in real time for sign language gesture recognition, as shown in Figure 5i. Zhao et al. [68] reported the use of stretchable optical waveguides for strain sensing in a prosthetic hand. The photonic strain sensors were integrated into a fiber-reinforced soft prosthetic hand, and various active sensing experiments were performed to feel the shape and softness of three tomatoes and select the ripe one. To solve the problem of poor flexibility and stretchability of electronic skin, Wang et al. [69] fabricated stretchable transistor arrays using polymer semiconductors. The tactile sensor they developed has extremely high sensitivity and excellent stretchability, and can accurately detect the position of small artificial ladybugs, showing a high degree of stability even under pressure and deformation.
2.2. Processing technologies for flexible components
There are many ways to prepare flexible sensors, such as dipping and coating, lithography, inkjet printing, screen printing, 3D printing, etc. The following describes the most common traditional preparation processes used in flexible sensors integrated into data gloves or hands to sense pressure, strain and EMG signals.
2.2.1. Dipping and coating
Dipping and coating are usually used when the base material is fabric. In order to impart sensitive or conductive properties to the fabric, conductive composite materials are often combined with the fabric by dipping or coating and other processes to form fabric sensors that can accurately sense external pressure or tension and are usually used as flexible sensors to measure the movement of the human hand or elbow joint.
The dipping or coating process has been used in some of the previous literature. Du et al. [50,64], as shown in Figure 6a. Ge et al. [70] provide an electronic fabric based on intertwined sensor electrodes that has the ability to simultaneously map and quantify the mechanical stresses induced by compression, lateral strain, and flexion. This stretchable electronic fabric with multiple force-mapping properties and high durability has potential applications in wearable artificial skin for humanoid robotics, biomedical prostheses, and physiological analysis devices.
2.2.2. Lithography
Lithography is a commonly used traditional fabrication process that is relatively complex, costly, and suitable for mass production. The minimum size of graphics produced by lithography can be as small as nanometers, which is suitable for application scenarios that require very high accuracy [75]. The principle of lithography is to use photoresist to transfer the pattern from the mask plate to the silicon wafer or other media layer, and to obtain a specific pattern shape after exposure and development [76]. Lithography processes can use different photoresists (also known as resists) and there are two different processes, namely positive resist lithography and negative resist lithography [77]. As shown in Figure 6b, Cui et al. [20] reported a new type of capacitive flexible pressure sensor, which has the characteristics of high sensitivity, fast mechanical response, wide working pressure range, durability, and good repeatability, etc. The whole preparation process is simple and easy to operate, and the resulting strain sensor can effectively detect the position and distribution of finger pressure. The method is found to be compatible with conventional nanomanufacturing technology, which can save cost in practical applications for large-scale production. Bae et al. [78] fabricated a graphene strain sensor by active ion etching, embossing on elastic plastic or stretchable rubber substrate. The graphene film was patterned by lithography. The wreath structure enabled the sensor to monitor complex motion or deformation of body parts.
2.2.3. Inkjet printing
Inkjet printing is usually controlled by a computer program. Compared with traditional fabrication technology, inkjet printing technology has gradually shown its great potential in the field of large-size, high-density flexible electronics due to its advantages of low cost, environmental friendliness, wide substrate applicability, high degree of graphic freedom, high precision, and non-contact [79]. Whether the performance of the flexible sensor of inkjet printing is excellent depends on whether the stability of the conductive ink of inkjet printing is good. At present, inkjet printing conductive inks mainly include transparent oxide ink, carbon ink, and metal ink, the advantages and disadvantages of which are listed in Table 1. As with the flexible sensor manufacturing materials, the difference in inkjet printing materials will make the stability, sensitivity and stretchability of the sensor different, so there is a difference in the perception of human hand movement.
2.2.4. Screen printing
Screen printing is performed by tilting a squeegee to deposit ink on a screen with a specific pattern on the substrate [90]. In recent years, screen printing electronics technology has developed rapidly, mainly because inkjet printing generally requires the conductive material in the ink to be less than 100 nm, screen printing ink requirements are not as stringent as inkjet printing, making screen printing is more conducive to the fabrication of large-area sensor arrays. To overcome the limitations of elastic electronics, such as cost, toxicity, or inability to pattern on a wide range of substrates, Tang et al. [72] developed an ink consisting of liquid metal particles and desirable polymer solutions for screen printing, which can be tuned to print on different surfaces and avoid toxic organic solvents in most cases, as shown in Figure 6c. Yoon et al. [73] used screen printing to fabricate a low-cost and stretchable Ag nanoparticle (NP) electrode on polyurethane (PU), as shown in Figure 6d. The resulting strain sensor has high stretchability, shows a stable response in the 20% strain range, and can be applied to the skin of human hands to measure changes in hand motion resistance. Liu et al. [91] design a printable nanocomposite with pearl-inspired hierarchical structure, diffusible components, and rich dynamic interactions for the construction of a healable and durable strain sensor. This strain sensor was fabricated by screen printing technique with the printing force, speed, and angle between the squeegee and stencil specifically optimized for the GO-AgNW-based inks, which can repeatedly and effectively self-heal with simple water treatment, greatly extending its lifetime and cycle life (over 10,000 cycles). Tian et al. [92] prepared Ag nanodendrite (ND) inks with good printability for a variety of substrates, which can be directly screen-printed onto nitrile rubber to fabricate strain sensors. Their different strain ranges and sensitivities can be obtained simultaneously by printing versatile geometric patterns. Finally, a smart glove based on PSSs is used to monitor human movements (finger bending, wrist bending, walking, etc.) and gesture actions.
2.2.5 3D printing
In today’s rapidly changing science and technology, it is difficult for traditional processes to process flexible sensors with complex functional structures, which greatly restricts the function of flexible sensors, so 3D printing technology has gradually attracted people’s attention. 3D printing technology is a new type of 3D functional device fabrication technology, which can fabricate flexible devices with complex geometric shapes through layer-by-layer assembly based on 3D digital models [93]. Based on the classification of materials, 3D printing can be divided into five aspects: 3D printed molds, the flexible sensor substrate and sensor body, the sensing element, the flexible and stretchable electrodes, and fully 3D printed tactile sensors [94]. Christ et al. [95] used dual nozzle 3D printing technology to fabricate uniaxial and biaxial strain sensors with conductive pattern designs that could be incorporated into wearable gloves to measure finger curvature. Such sensors have potential applications in wearable electronics, soft robotics, and prosthetics. Yin et al. [96] constructed an ionic conductive hydrogel using the 3D printing technology of photopolymerization. Based on the transparent and highly elastic hydrogel, a capacitive sensor was developed that could sense pressure and strain and determine skin position by collecting body signals. Muth et al. [74] report an embedded 3D printing method, shown in Figure 6f, where conductive ink is extruded directly through a deposition nozzle into an elastic reservoir, where the ink forms a resistive sensing element and the reservoir serves as a substrate material, creating a highly stretchable strain sensor that can be embedded in a data glove to measure gesture changes. Leigh et al. [97] presented the formulation of a simple conductive thermoplastic composite called "carbomorph" and its use in a low-cost 3D printer to print electronic sensors capable of sensing mechanical bending and capacitance changes.
3. Application of flexible sensor technology to manipulator control
The continuous development of various flexible substrate materials, sensor materials and conductive materials has laid the foundation for the production of flexible sensors with various functions. With the continuous progress of preparation technology, the application fields of flexible sensors are expanding. Based on the research on the manufacturing materials and technology of flexible sensors, this paper introduces the application of flexible sensors in the field of manipulator control.
The development of robots requires the combination of knowledge and technology from various fields, such as manufacturing, sensor technology, and artificial intelligence. The requirements of the robot for high intelligence, good flexibility and strong versatility are constantly being realized. The manipulator can respond to changes in hand posture using data glove control or surface EMG control based on flexible sensors. The data glove control method usually takes the flexible sensor element as the core component, which is designed as an intelligent electronic device integrated into the data glove for robot hand control. The surface electromyographic signal is used to control the manipulator through pattern recognition of the collected information.
3.1. Flexible sensor integrated into data glove for manipulator control
Researchers often use flexible sensors integrated into data gloves to capture changes in gesture state, which are then transmitted to the manipulator via an external connected device for gesture simulation. The first glove-based systems were developed in the 1970s, and a number of different designs have been proposed since then. Early glove prototypes included the Sayre Glove, the Massachusetts Institute of Technology (MIT)-LED glove and the Digital Entry Data Glove [98]. Beginning in 1987, American scientists began to apply flexible printing technology to data glove research, and it slowly became popular. The first commercially available data glove appeared in 1987, this was an improved version of the first DataGlove developed by Zimmerman in 1982 [99,100]. The technology was similar to that used in the Sayre Glove in 1977. In 1990, Eglowstein [101] reported on three commercial hand trackers: VPL Research’s DataGlove, Exos’ Dexterous Hand Master, and Mattel’s Power Glove. In 1999, LaViola [102] conducted a survey of hand posture and gesture recognition techniques and technologies.
In general, the installation position of the flexible sensor on the data glove is generally divided into three parts: (1) The installation of the finger joint to measure the amount of movement in the metacarpophalangeal (MCP) and proximal interphalangeal (PIP) joints when the gesture changes; (2) Installed on the fingertips to measure pressure; (3) Carpal movements were detected in each part of the palm, as shown in Figure 7 [103]. The number of sensors is related to the degree of freedom to be measured, and in general a position requires a flexible sensor.
The flexible sensor integrated in the data glove has two types, piezoresistive and fiber optic, according to the different sensing principles. The flexible piezoresistive sensor is a type of flexible pressure sensor that can convert the external pressure or strain stimulus signal into an electrical signal by the piezoresistive mechanism. The fiber optic sensor is based on the photoelectric principle, which converts the optical signal into an electrical signal that can be measured and recorded to achieve detection.
Clauser et al. [104] proposed a stretch sensing soft glove composite of silicone and textile layers to interactively capture hand poses with high accuracy and without the need for an external optical setup. Sundaram et al. [105] designed a scalable tactile glove that, in combination with deep convolutional neural networks, represents the sensors distributed over the hand and can be used to identify individual objects, estimate their weight, and explore the typical tactile patterns that occur when objects are grasped. Based on the poly(acrylamide) (PAAm) hydrogel, a strain sensor with high stretchability and sensitivity was designed and fabricated by Hang et al. [106]. Then, a smart glove was fabricated by the coupling of multiple strain sensors and the corresponding circuit. The smart glove is capable of expressing and recognizing American Sign Language and can be used to wirelessly control a robotic hand through hand gestures. A biologically inspired soft robotic thumb rehabilitation system has been developed by Maeder-Yorkto et al. [107], which is capable of reproducing the motion path of a thumb during opposition grasping. The integration of this with a lightweight hand fixation and a compact control system resulted in a promising prototype for a wearable, home-based, task-oriented thumb rehabilitation device. A multi-sensor glove controller is designed by Jhang et al. [108] to control a mobile robot and a 6-axis robotic arm for industrial operations. The user can monitor the situation in front of the mobile robot arm and record the trajectory and position coordinates, thus achieving the functions of remote control. Pu et al. [109] developed a triboelectric quantization sensor for joint motion and constructed a synchronous control system for a manipulator capable of grasping objects. Using the sensor on the data glove to measure the bending or opening angle of the finger, and then finding the mapping relationship between the sensor measurement data and the change in hand posture, the researchers continue to work on finding this more accurate mapping relationship. A more detailed summary of the sensor technology used in data gloves is shown in Table 2.
As sensor technology has matured, more and more research has been conducted on robots that receive the motion information collected from human hands and mimic human hands to perform the corresponding action, with increasing accuracy. Nassour et al. [126] proposed a versatile soft-sensing glove using commercially available silicone tubing to house the conductive fluid. 14 sensors were attached to the glove to measure flexion-extension and abduction-adduction, successfully replicating hand movements. The machine learning algorithms were used to estimate the angles of the joints in the hand and also to identify 15 gestures, with a classification accuracy of 0.885. Pan et al. [127] presented a wireless smart glove based on multi-channel capacitive pressure sensors that can detect 10 American Sign Language gestures at the edge of the glove. In this system, 16 capacitive sensors are fabricated on a glove to capture the hand gestures. The highest test classification accuracy achieved by our system is 99.7%. Maitre et al. [128,129] proposed a new prototype of a data glove that is simple, cheap, reproducible, and efficient (∼100% correct predictions) for object recognition by abstracting the entire theory of gesture recognition. In real life, such a device could be very useful to monitor the evolution of hand dysfunction in Alzheimer’s disease. To solve the problem of separating meaningful dynamic gestures, Lee et al. [130] proposed a gesture spotting algorithm based on deep learning that detects the beginning and end of a gesture sequence in a continuous data stream. The three algorithms (gesture spotting, sequence simplification, and gesture recognition) were unified into a real-time gesture recognition system and tested with 11 dynamic finger gestures in real-time. Ayodele et al. [131] proposed a piezoresistive data glove using convolutional neural networks (CNN) on six capture classification scenarios. Based on the CNN algorithm, the average classification accuracy was 88.27% and 75.73% for visible and invisible objects, respectively. By sewing reduced graphene oxide (RGO)-coated fibers onto a textile glove, Huang et al. [132] fabricated a flexible and low-cost data glove that was used to monitor the movement of ten finger joints of a hand. Experimental results show the good stability and repeatability of the data glove, with recognition accuracies of 98.5 and 98.3% in different test scenarios. Figure 8 shows the images of gesture recognition manipulators based on different sensor technologies.
3.2. Manipulator control application based on surface EMG signal
The flexible sensor has excellent performance, convenient and flexible, and can be made into flexible electronic devices to obtain rich and diverse signals from the human body by wearing on the hand as a command source to control the robot hand. Among them, surface electromyography (EMG) is a non-invasive method of recording EMG signals. The EMG signals from the muscles of the forearm can be used to detect hand grips and gestures. The surface EMG signal is relatively easy to record. With the development of sensor technology, the EMG signal of the forearm of the human body is collected by flexible wearable sensors to identify the posture change of the hand, and to realize the following or synchronous posture change of the manipulator and the hand.
Siomau et al. [133] processed the electrical nerve signals collected from the surface of the residual limb muscles and used them to control the prosthesis for different movements. By assuming that there are distinguishable and repeatable signal patterns between different types of muscle activation, the prosthesis control problem was reduced to a pattern recognition problem and verified. Pedro et al. [134] created a soft, ultra-thin, stretchable electronic skin by printing patterns on temporary tattoo paper using a desktop laser printer and then coating it with silver ink and a eutectic gallium indium (EGaIn) liquid metal alloy that self-adheses to the human epidermis to collect EMG signals to control robotic prostheses. Huang et al. [135] created a scalable human-machine interface test platform based on a four-layer design that provided eight-channel sensing, collected acceleration, angular velocity, and surface EMG signals, and controlled the translational rotation and grasp of the robotic arm, respectively, via the platform’s Bluetooth data communication function. Leigh et al. [136] propose a wearable machine joint interface device that enhances our innate capabilities by providing additional machine joints, enabling “collaborative interaction” where the movement of the machine joints can be controlled through an interface with our muscle signals as a direct extension of our body.
The brain sends the intention to move, which triggers the excitation of the appropriate motor control area of the cerebral cortex, and then causes the nerve impulse from the human motor center to be transmitted to the human forearm muscles, generating the action potential sequence to reach the skin surface through the tissue fluid and sebum. The surface electrode picks up the surface EMG signal on the skin, amplifies and filters the signal modulation by the signal conditioning circuit, pre-processes the signal, extracts the EMG feature and classifies the pattern. The classification results are sent to the manipulator, which performs the appropriate action by controlling the toggle drive motor. The identification process is shown in Figure 9.
In order to control the manipulator by surface EMG, the most important thing is to extract and classify the EMG feature. The EMG feature extraction methods usually require time domain analysis, frequency domain analysis and time-frequency domain combination analysis. The time domain features mainly include mean absolute value, root mean square and so on. The frequency domain features are power spectral density, mean frequency, median frequency and autoregressive coefficient. Time-frequency domain analysis mainly includes short-time transformation, Winger-Ville transformation and so on. The classification methods of EMG signal mainly include neural network, fuzzy algorithm, probability estimation based algorithm, support vector machine (SVM), principal component analysis (PCA) and linear discriminant analysis (LDA), and so on. Table 4 shows the accuracy of different classifiers in EMG classification.
An automatic recognition algorithm for identifying hand movements from surface EMG signals has been proposed by Fatimah et al. [137]. Two publicly available datasets are used to test the effectiveness of the proposed algorithm. With an average accuracy of 99.49% on the UCI dataset and 93.53% on the NinaPro DB5, the proposed method outperforms the state-of-the-art algorithms. The differences between the electromyography (EMG) patterns of able-bodied subjects and amputees were investigated by Campbell et al. [138]. Using previously collected EMG data for different wrist, finger and grip potentials of 20 able-bodied subjects and 10 amputees, the results of unsupervised cluster analysis show that a simple linear classifier can discriminate able-bodied and amputee subjects with 90% accuracy using multiple gesture EMG. Four machine learning (ML) algorithms, Support Vector Machine (SVM), Random Forest (RF), Bagged Tree and Extreme Gadient Boosting (XGBoost), were used by Alam et al. [139] to classify hand gestures using electromyography (EMG) dataset, the prediction accuracy of these algorithms was compared with Long Short-Term Memory (LSTM). XGBoost provided the highest accuracy of approximately 97%, while LSTM provided a superior accuracy of nearly 99%, which promises to provide physiologically natural upper limb movement control. Lucas et al. [140] proposed a supervised classification method for multi-channel surface EMG signals, using a support vector machine (SVM) to classify them in the multi-channel representation space, and applied the method to the classification of six hand movements. The mean misclassification rate (mean ± S.D.) for the classification of 8 channels in 6 subjects was 4.7 ± 3.7%. Alkan et al. [141] used discriminant analysis and a support vector machine (SVM) classifier to classify recorded EMG signals generated by the biceps and triceps muscles for four different movements. The SVM classifier gives a very good average accuracy rate (99%) for four movements, which can be used to classify EMG signals for prospective arm prosthesis control studies. A homemade four-channel sEMG amplifier circuit was designed by Baspinar et al. [142] to measure sEMG signals. Seven different movements were classified and their classification performance was compared. The classification rates of ANN and GMM classifiers were compared. For other EMG acquisition devices, their classification methods and recognition accuracy are listed in Table 3.
4. Existing issues and solutions
This paper reviews the research on manipulator control based on flexible sensor technology, and summarizes the existing problems in this field from three aspects: materials, processing technology and manipulator control system design, and the corresponding solutions.
4.1. Problems and solutions related to materials
Flexible sensor materials cover almost all categories of organic or inorganic materials, including liquids, gels and solids. In order for flexible sensors to be better embedded in data gloves or to fit on the arm, flexible materials must have improved mechanical properties, biocompatibility and electrical conductivity. Researchers aim to achieve this by preparing composite materials, micro-structuring substrate materials or modifying the structure of existing materials.
(1) Preparation of the composite materials: The core component of the flexible sensor is the composite material formed by mixing the conductive sensing material with the base material, which has a strong relationship with the sensitivity, linear range and response time of the sensor. For example, it is difficult for simple carbon-based materials to form an ordered arrangement at the macro level, and a disordered arrangement will weaken the conductivity of the material itself. The use of composite materials is an effective way to maintain good conductivity in flexible sensors under high strain. Traditional electrode materials cannot meet the demand for flexibility, so researchers can effectively solve this problem by using composite materials as electrodes and develop stretchable capacitive sensors. If the composite material is not strong enough, it may affect the stability of the flexible sensor, and special processing methods are usually used to improve the stability of the sensor.
(2) The problem of limited substrate elasticity is solved by micro-structuring: The substrate material not only affects the elastic deformation performance of the sensor, but also has a critical effect on the sensing performance. The microstructure of the substrate material is one of the important methods to improve the performance of the sensor. The micro-structured substrate film can not only improve the elastic deformation performance of the sensor, but also make the flexible sensor have higher sensitivity and faster response time than the unstructured flexible substrate film. The traditional microstructure is mainly obtained by lithography process. The micropattern mold is first prepared by the manufacturing process, then the required solvent is spin-coated on the mold after stirring and degassing, and finally the micro-structured base material is stripped after curing. In addition, by changing the structure of the existing material, the flexible sensor can have better mechanical properties. In the case of non-stretchable rigid materials, special processes can also be used to make them flexible and able to withstand a certain amount of strain.
4.2. Problems and solutions in the preparation process
The choice of printing process is the key to low-cost, rapid, large-scale production of flexible sensors, at present, various printing processes are emerging in endless, to a large extent to solve the traditional lithography technology caused by high manufacturing costs, complex preparation process, do not have large-scale production conditions and other problems. However, the printing process also has some impact on the sensitivity of flexible sensors, mainly in the following aspects:
(1) the materials used in printing are different, and changing the ratio of materials can give the sensor different resistivity, resulting in different circuit conductivity; (2) the viscosity of the material has a certain impact on the shape of the sensor circuit, if the ink viscosity is too large, it will lead to poor ink transfer in the printing process, paste plate, viscosity is too small, ink is too thin, it will cause printing or migration, ink infiltration; (3) In some printing resistances, the pattern design of the screen will directly affect the accuracy of printing; (4) In the whole process, there will be a small deviation from the design value, that is, the manufacturing tolerance, mainly due to the temperature and humidity in the air, and some uncontrollable factors in the preparation process, so to reduce the preparation tolerance as much as possible, and then improve the sensitivity.
In summary, the quality of the printing process directly affects the performance of the electronic device, and the preparation process needs to be further optimized.
4.3. Manipulator control system problems
Both data glove-based manipulator control and human EMG-based manipulator control have room for improvement in terms of cost, type of information collected and recognition accuracy.
(1) Cost problem of data glove: Although there are already many data glove products on the market, and researchers are constantly innovating in this field, data glove will incur a lot of costs during the production process, including the cost of materials required to manufacture the glove itself and the flexible sensor, the cost of external circuit boards or some other hardware production, which makes it difficult to put this device into practical use in large numbers. In the future, the cost of using data gloves will be reduced and their development in the market will be more convenient.
(2) The category bottleneck problem of manual movement information collected by data glove: the generation of electromyographic signal is due to the hungry excitation of the cerebral cortex, while the manual movement information collected by data glove is the pressure or angle change generated when the gesture changes, obviously the electromyographic signal is more abundant.
(3) Improving the sensitivity/accuracy: First of all, the type of material used has an impact on its accuracy. For strain sensors, the better the piezoresistive properties of the material, the better the performance of the sensor; for pressure sensors, the electrical conductivity of the materials greatly affects the accuracy of signal conversion in collecting useful information, and then affects the accuracy of detection. The photoelectric properties of the material affect the sensing performance of the optical fiber sensor. Secondly, the design of the circuit affects the sensitivity/accuracy. The acquisition system generally uses the computer as the hardware platform, and the A/D converted EMG signal is sent to the computer by the data acquisition circuit for post-processing. The higher the sensitivity of the circuit design, the better the circuit design must be to improve the sensitivity. Finally, the design of the classification algorithm affects the sensitivity/accuracy. In research, it is best to compare and select different classification model algorithms and select the one with the highest accuracy for pattern recognition to achieve better control of the manipulator.
5. Conclusions
This paper summarizes the literature in the field of manipulator control by data glove or by EMG based on flexible sensor technology. Because the flexible sensor can be attached to the data glove or attached to the human arm to collect signals, it has the characteristics of natural and direct, so it has gradually replaced other methods to become the focus of manipulator control research. The choice of substrate material, sensor material and electrode material has a great impact on the sensitivity of the designed flexible sensor. It is particularly important to choose the right material, combined with the design of microstructure and microchannel, to produce a flexible sensor with high sensitivity, extensibility and good conductivity, which will greatly reduce the problems existing in the process of gesture signal acquisition. The bend sensor integrated on the data glove detects the degree of finger bend and the angle of finger opening, realizes the monitoring of all finger joints, enhances the gesture perception ability and improves the accuracy of gesture discrimination. By processing the surface EMG signal collected by the strain sensor attached to the human arm to judge the posture of the human hand, the EMG signal contains very rich information, and the online training of the manipulator with the basic algorithm can constantly improve the recognition rate.
In the future research, there are two research directions in the field of manipulator control. (1) In the manipulator control research, the real-time performance and the accuracy of the manipulator after receiving the signal are equally important. In the future, based on the experimental verification, the real-time performance should be considered from the whole control system, the analysis should be carried out from the active end to the slave end, and the hardware design of the manipulator should be further studied to further improve the real-time performance and accuracy. Simple and effective algorithm design will continue to be a hot spot in the future research of manipulator, and better algorithms can be explored in the future to improve the accuracy of model recognition and ensure the effectiveness of real-time control. (2) With the development of human beings into deeper fields, the control of the manipulator also needs to be transferred from the ordinary end-to-end to the interactive mode, that is, the manipulator receives the signal of the human hand to complete the specified action and gives back to the human hand, so that the human can decide whether to change the decision according to the feedback signal. This interaction technology can make the use of the manipulator more practical. On this basis, flexible sensor technology can be applied to other parts of the body to identify human movements projected onto the robot, and the robot can be remotely controlled to act according to the user’s intention.
Author Contributions
Conceptualization, J.C.; methodology, J.C., C.W. and B.Y.; software, C.W.; validation, J.C. and C.W.; formal analysis, J.C., C.W. and B.Y.; investigation, J.C. and C.W.; resources, J.C.; data curation, J.C. and C.W.; writing—original draft preparation, J.C. and C.W.; writing—review and editing, J.C., C.W. and B.Y.; visualization, J.C. and C.W.; supervision, J.C. and JX.C.; project administration, J.C. and JX.C.; funding acquisition, J.C. and B.Y.; All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by National Natural Science Foundation of China (Grant Number: 52075138), the Natural Science Foundation of Jiangsu Province (Grant Number: BK20190873), the Postgraduate Research and Practice Innovation Project of Jiangsu Province, the Natural Science Foundation of the Jiangsu Higher Education Institutions of China (Grant Number: 22KJB150050), Jiangsu Agricultural Science and Technology Innovation Fund (Grant Number: CX(21)3162), the Market Supervision Administration Science and Technology Fund of Jiangsu Province (Grant Number: KJ2023076), and the Science and Technology Planning Project of Yangzhou City (Grant Number: YZ2022180).
Data Availability Statement
The data presented in this study are available upon request from the corresponding author.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Zhang, B.; Xie, Y.; Zhou, J.; Wang, K.; Zhang, Z. State-of-the-art robotic grippers, grasping and control strategies, as well as their applications in agricultural robots: A review. Computers and Electronics in Agriculture 2020, 177. [Google Scholar] [CrossRef]
- Wang, G.; Gui, J.; Jiang, Z.; Jin, X. Progress of Interactive Holographic Display. Laser & Optoelectronics Progress 2019, 56. [Google Scholar] [CrossRef]
- Zhou, Y.; Jiang, G.; Lin, Y. A novel finger and hand pose estimation technique for real-time hand gesture recognition. Pattern Recognition 2016, 49, 102–114. [Google Scholar] [CrossRef]
- Ferri, J.; Llopis, R.L.; Moreno, J.; Civera, J.I.; Garcia-Breijo, E. A wearable textile 3D gesture recognition sensor based on screen-printing technology. Sensors (Basel) 2019, 19. [Google Scholar] [CrossRef] [PubMed]
- Zhang, H.; Zhang, D.; Guan, J.; Wang, D.; Tang, M.; Ma, Y.; Xia, H. A flexible wearable strain sensor for human-motion detection and a human-machine interface. Journal of Materials Chemistry C 2022, 10, 15554–15564. [Google Scholar] [CrossRef]
- Tadano, K.; Akai, M.; Kadota, K.; Kawashima, K. Development of grip amplified glove using bi-articular mechanism with pneumatic artificial rubber muscle. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 2010; pp. 2363–2368. [Google Scholar] [CrossRef]
- Suzumori, k.; likura, S.; Tanaka, H. Applying a flexible microactuator to robotic mechanisms. IEEE Control Systems 1992, 21, 21–27. [Google Scholar] [CrossRef]
- Hao, Y.; Gong, Z.; Xie, Z.; Guan, S.; Yang, X.; Ren, Z.; Wang, T. Universal soft pneumatic robotic gripper with variable effective length. In Proceedings of the 35th Chinese Control Conference, Chengdu, China, 2016; pp. 6109–6114. [Google Scholar] [CrossRef]
- Muscato, G.; Prestifilippo, M.; Abbate, N.; Rizzuto, I. A prototype of an orange picking robot: Past history, the new robot and experimental results. Industrial Robot: An International Journal 2005, 32, 128–138. [Google Scholar] [CrossRef]
- Wege, A.; Hommel, G. Development and control of a hand exoskeleton for rehabilitation of hand injuries. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots & System, Edmonton, Alta, 2005; pp. 3046–3051. [Google Scholar] [CrossRef]
- Wang, Z.; Hirai, S. Soft Gripper Dynamics Using a Line-Segment Model With an Optimization-Based Parameter Identification Method. IEEE Robotics and Automation Letters 2017, 2, 624–631. [Google Scholar] [CrossRef]
- Ito, S.; Kawasaki, H.; Ishigure, Y.; Natsume, M.; Mouri, T.; Nishimoto, Y. A design of fine motion assist equipment for disabled hand in robotic rehabilitation system. J. Frankl. Inst. 2011, 348, 79–89. [Google Scholar] [CrossRef]
- Fontana, M.; Dettori, A.; Salsedo, F.; Bergamasco, M. Mechanical design of a novel hand exoskeleton for accurate force displaying. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation Kobe, Japan, 2009; pp. 1704–1709. [Google Scholar] [CrossRef]
- Spiers, A.J.; Liarokapis, M.V.; Calli, B.; Dolla, A.M. Single-Grasp object classification and feature extraction with simple robot hands and tactile sensors. IEEE Trans Haptics 2016, 9, 207–220. [Google Scholar] [CrossRef]
- Nam, S.H.; Jeon, P.J.; Min, S.W.; Lee, Y.T.; Park, E.Y.; Im, S. Highly sensitive non-classical strain gGauge using organic heptazole thin-film transistor circuit on a flexible substrate. Advanced Functional Materials 2014, 24, 4413–4419. [Google Scholar] [CrossRef]
- Zeng, X.; Wang, Z.; Zhang, H.; Yang, W.; Xiang, L.; Zhao, Z.; Peng, L.; Hu, Y. Tunable, ultrasensitive, and flexible pressure sensors based on wrinkled microstructures for electronic skins. ACS applied materials & interfaces 2019, 11, 21218–21226. [Google Scholar] [CrossRef]
- Wang, X.; Gu, Y.; Xiong, Z.; Cui, Z.; Zhang, T. Silk-molded flexible, ultrasensitive, and highly stable electronic skin for monitoring human physiological signals. Adv Mater 2014, 26, 1336–1342. [Google Scholar] [CrossRef] [PubMed]
- Huang, J.; Yang, X.; Liu, J.; Her, S.-c.; Guo, J.; Gu, J.; Guan, L. Vibration monitoring based on flexible multi-walled carbon nanotube/polydimethylsiloxane film sensor and the application on motion signal acquisition. Nanotechnology 2020, 31, 335504. [Google Scholar] [CrossRef]
- Jeong, S.H.; Zhang, S.; Hjort, K.; Hilborn, J.; Wu, Z. PDMS-Based elastomer tuned soft, stretchable, and sticky for epidermal electronics. Adv Mater 2016, 28, 5830–5836. [Google Scholar] [CrossRef]
- Cui, J.; Zhang, B.; Duan, J.; Guo, H.; Tang, J. Flexible pressure sensor with Ag wrinkled electrodes based on PDMS substrate. Sensors (Basel) 2016, 16. [Google Scholar] [CrossRef]
- Jiang, Y.; He, Q.; Cai, J.; Shen, D.; Hu, X.; Zhang, D. Flexible strain sensor with tunable sensitivity via microscale electrical breakdown in graphene/polyimide thin films. ACS Appl Mater Interfaces 2020, 12, 58317–58325. [Google Scholar] [CrossRef]
- Sekitani, T.; Zschieschang, U.; Klauk, H.; Someya, T. Flexible organic transistors and circuits with extreme bending stability. Nat Mater 2010, 9, 1015–1022. [Google Scholar] [CrossRef]
- Liu, H.; Huang, W.; Yang, X.; Dai, K.; Zheng, G.; Liu, C.; Shen, C.; Yan, X.; Guo, J.; Guo, Z. Organic vapor sensing behaviors of conductive thermoplastic polyurethane–graphene nanocomposites. Journal of Materials Chemistry C 2016, 4, 4459–4469. [Google Scholar] [CrossRef]
- Liu, H.; Dong, M.; Huang, W.; Gao, J.; Dai, K.; Guo, J.; Zheng, G.; Liu, C.; Shen, C.; Guo, Z. Lightweight conductive graphene/thermoplastic polyurethane foams with ultrahigh compressibility for piezoresistive sensing. Journal of Materials Chemistry C 2017, 5, 73–83. [Google Scholar] [CrossRef]
- Liu, H.; Li, Y.; Dai, K.; Zheng, G.; Liu, C.; Shen, C.; Yan, X.; Guo, J.; Guo, Z. Electrically conductive thermoplastic elastomer nanocomposites at ultralow graphene loading levels for strain sensor applications. Journal of Materials Chemistry C 2016, 4, 157–166. [Google Scholar] [CrossRef]
- Seyedin, M.Z.; Razal, J.M.; Innis, P.C.; Wallace, G.G. Strain-Responsive Polyurethane/PEDOT:PSS eastomeric composite fibers with high electrical conductivity. Advanced Functional Materials 2014, 24, 2957–2966. [Google Scholar] [CrossRef]
- Li, M.; Li, H.; Zhong, W.; Zhao, Q.; Wang, D. Stretchable conductive polypyrrole/polyurethane (PPy/PU) strain sensor with netlike microcracks for human breath detection. ACS Appl Mater Interfaces 2014, 6, 1313–1319. [Google Scholar] [CrossRef] [PubMed]
- Tran, M.T.; Tung, T.T.; Sachan, A.; Losic, D.; Castro, M.; Feller, J.-F. 3D sprayed polyurethane functionalized graphene / carbon nanotubes hybrid architectures to enhance the piezo-resistive response of quantum resistive pressure sensors. Carbon 2020, 168, 564–579. [Google Scholar] [CrossRef]
- Yin, B.; Wan, X.; Qian, C.; Sohan, A.; Zhou, T.; Yue, W. Enzyme Method-Based Microfluidic Chip for the Rapid Detection of Copper Ions. Micromachines (Basel) 2021, 12. [Google Scholar] [CrossRef]
- Yin, B.; Wan, X.; Sohan, A.; Lin, X. Microfluidics-Based POCT for SARS-CoV-2 Diagnostics. Micromachines (Basel) 2022, 13. [Google Scholar] [CrossRef]
- Yin, B.-F.; Wan, X.-H.; Yang, M.-Z.; Qian, C.-C.; Sohan, A.S.M.M.F. Wave-shaped microfluidic chip assisted point-of-care testing for accurate and rapid diagnosis of infections. Military Medical Research 2022, 9, 8. [Google Scholar] [CrossRef]
- Sun, Y.; Rogers, J.A. Structural forms of single crystal semiconductor nanoribbons for high-performance stretchable electronics. Journal of Materials Chemistry 2007, 17. [Google Scholar] [CrossRef]
- Cai, Y.; Zhang, X.; Wang, G.; Li, G.; Zhao, D.; Sun, N.; Li, F.; Zhang, H.; Han, J.; Yang, Y. A flexible ultra-sensitive triboelectric tactile sensor of wrinkled PDMS/MXene composite films for E-skin. Nano Energy 2021, 81. [Google Scholar] [CrossRef]
- Kang, J.; Son, D.; Wang, G.-J.N.; Liu, Y.; Lopez, J.; Kim, Y.; Oh, J.Y.; Katsumata, T.; Jaewan Mun; Lee, Y.; et al. Tough and Water-Insensitive Self-Healing Elastomer for Robust Electronic Skin. Adv Mater 2018, 30, e1706846. [Google Scholar] [CrossRef]
- Wang, X.; Liu, X.; Schubert, D.W. Highly sensitive ultrathin flexible thermoplastic Polyurethane/Carbon black fibrous film strain sensor with adjustable scaffold networks. Nanomicro Lett 2021, 13, 64. [Google Scholar] [CrossRef] [PubMed]
- Zhou, Y.; Zhan, P.; Ren, M.; Zheng, G.; Dai, K.; Mi, L.; Liu, C.; Shen, C. Significant stretchability enhancement of a crack-based strain sensor combined with high sensitivity and superior durability for motion monitoring. ACS Appl Mater Interfaces 2019, 11, 7405–7414. [Google Scholar] [CrossRef] [PubMed]
- Liu, H.; Jiang, H.; Du, F.; Zhang, D.; Li, Z.; Zhou, H. Flexible and degradable paper-based strain sensor with low cost. ACS Sustainable Chemistry & Engineering 2017, 5, 10538–10543. [Google Scholar] [CrossRef]
- Hu, L.; Pasta, M.; Mantia, F.L.; Cui, L.; Jeong, S.; Deshazer, H.D.; Choi, J.W.; Han, S.M.; Cui, Y.; Hu, L.; et al. Stretchable, porous, and conductive energy textiles. Nano Lett 2010, 10, 708–714. [Google Scholar] [CrossRef] [PubMed]
- Li, C.; Wang, C.; Zheng, P.; Cao, Y.; Lissel, F.; Keplinger, C.; Linder, C.; Zuo, J.; Jin, L.; Sun, Y.; et al. A highly stretchable autonomous self-healing elastomer. Nat Chem 2016, 8, 618–624. [Google Scholar] [CrossRef] [PubMed]
- Kim, T.; Lee, T.; Lee, G.; Choi, Y.W.; Kim, S.M.; Kang, D.; Choi, M. Polyimide encapsulation of spider-inspired crack-based sensors for durability improvement. Applied Sciences 2018, 8. [Google Scholar] [CrossRef]
- Hamedi, M.M.; Ainla, A.; Güder, F.; Christodouleas, D.C.; Fernández-Abedul, M.T.; Whitesides, G.M. Integrating electronics and microfluidics on paper. Adv Mater 2016, 28, 5054–5063. [Google Scholar] [CrossRef]
- Ruckdashel, R.R.; Venkataraman, D.; Parka, J.H. Smart textiles: A toolkit to fashion the future. Journal of Applied Physics 2021, 129. [Google Scholar] [CrossRef]
- Wang, C.; Xia, K.; Wang, H.; Liang, X.; Yin, Z.; Zhang, Y. Advanced carbon for flexible and wearable electronics. Adv Mater 2019, 31, e1801072. [Google Scholar] [CrossRef]
- Lipomi, D.J.; Vosgueritchian, M.; Tee, B.C.-K.; Hellstrom, S.L.; Lee, J.A.; Fox, C.H.; Bao, Z. Skin-like pressure and strain sensors based on transparent elastic films of carbon nanotubes. Nat Nanotechnol 2011, 6, 788–792. [Google Scholar] [CrossRef]
- Jung, H.-C.; Moon, J.-H.; Baek, D.-H.; Lee, J.-H.; Choi, Y.-Y.; Hong, J.-S.; Lee, S.-H. CNT/PDMS composite flexible dry electrodes for long-term ECG monitoring. IEEE Trans Biomed Eng 2012, 59, 1472–1479. [Google Scholar] [CrossRef] [PubMed]
- Paul, S.J.; Elizabeth, I.; Gupta, B.K. Ultrasensitive wearable strain sensors based on a VACNT/PDMS thin film for a wide range of human motion monitoring. ACS Appl Mater Interfaces 2021, 13, 8871–8879. [Google Scholar] [CrossRef] [PubMed]
- Boutry, C.M.; Negre, M.; Jorda, M.; Vardoulis, O.; Chortos, A.; Khatib, O.; Bao, Z. A hierarchically patterned, bioinspired e-skin able to detect the direction of applied pressure for robotics. Sci Robots 2018, 3. [Google Scholar] [CrossRef] [PubMed]
- Pan, F.; Chen, S.-M.; Li, Y.; Tao, Z.; Ye, J.; Ni, K.; Yu, H.; Xiang, B.; Ren, Y.; Qin, F.; et al. 3D graphene films enable simultaneously high sensitivity and large stretchability for strain sensors. Advanced Functional Materials 2018, 28. [Google Scholar] [CrossRef]
- Polat, E.O.; Mercier, G.; Nikitskiy, I.; Puma, E.; Galan, T.; Gupta, S.; Montagut, M.; Piqueras, J.J.; Bouwens, M.; Durduran, T.; et al. Flexible graphene photodetectors for wearable fitness monitoring. 2019. [Google Scholar] [CrossRef]
- Lu, Y.; Tian, M.; Sun, X.; Pan, N.; Zhu, S.; Zhang, X.; Chen, S. Highly sensitive wearable 3D piezoresistive pressure sensors based on graphene coated isotropic non-woven substrate. Composites Part A: Applied Science and Manufacturing 2019, 117, 202–210. [Google Scholar] [CrossRef]
- Tao, L.-Q.; Zhang, K.-N.; Tian, H.; Liu, Y.; Wang, D.-Y.; Chen, Y.-Q.; Yang, Y.; Ren, T.-L. Graphene-Paper Pressure Sensor for Detecting Human Motions. ACS Nano 2017, 11, 8790–8795. [Google Scholar] [CrossRef]
- Wang, S.; Fang, Y.; He, H.; Zhang, L.; Li, C.a.; Ouyang, J. Wearable stretchable dry and self-adhesive strain sensors with conformal contact to skin for high-quality motion monitoring. Advanced Functional Materials 2020, 31. [Google Scholar] [CrossRef]
- Kim, K.K.; Ha, I.; Won, P.; Seo, D.-G.; Cho, K.-J.; Ko, S.H. Transparent wearable three-dimensional touch by self-generated multiscale structure. Nat Commun 2019, 10, 2582. [Google Scholar] [CrossRef]
- Choi, T.Y.; Hwang, B.-U.; Kim, B.-Y.; Trung, T.Q.; Nam, Y.H.; Kim, D.-N.; Eom, K.; Lee, N.-E. Stretchable, Transparent, and Stretch-Unresponsive capacitive touch sensor array with selectively patterned silver nanowires/reduced graphene oxide electrodes. ACS Appl Mater Interfaces 2017, 9, 18022–18030. [Google Scholar] [CrossRef]
- Rahimi, R.; Ochoa, M.; Yu, W.; Ziaie, B. Highly stretchable and sensitive unidirectional strain sensor via laser carbonization. ACS Appl Mater Interfaces 2015, 7, 4463–4470. [Google Scholar] [CrossRef] [PubMed]
- Zhu, S.-E.; Krishna Ghatkesar, M.; Zhang, C.; Janssen, G.C.A.M.; Zhu, S.; Ghatkesar, M.K.; Zhang, C.; Janssen, G.C.A.M. Graphene based piezoresistive pressure sensor. Applied Physics Letters 2013, 102. [Google Scholar] [CrossRef]
- Boland, C.S.; Khan, U.; Backes, C.; O’Neill, A.; McCauley, J.; Duane, S.; Shanker, R.; Liu, Y.; Jurewicz, I.; Dalton, A.B.; et al. Sensitive, high-strain, high-rate bodily motion sensors based on graphene-rubber composites. ACS Nano 2014 8, 8819–8830. [CrossRef]
- Cheng, Y.; Wang, R.; Sun, J.; Gao, L. A stretchable and highly sensitive graphene-based fiber for sensing tensile strain, bending, and Torsion. Adv Mater 2015, 27, 7365–7371. [Google Scholar] [CrossRef] [PubMed]
- Samad, Y.A.; Li, Y.; Alhassanb, S.M.; Liao, K. Non-destroyable graphene cladding on a range of textile and other fibers and fiber mats. RSC Adv. 2014, 4, 16935–16938. [Google Scholar] [CrossRef]
- Xiea, X.; Huangb, H.; Zhua, J.; Yua, J.; Wanga, Y.; Hua, Z. A spirally layered carbon nanotube-graphene/polyurethane composite yarn for highly sensitive and stretchable strain sensor. Composites Part A: Applied Science and Manufacturing 2020, 135. [Google Scholar] [CrossRef]
- Zhang, Y.; Ren, E.; Li, A.; Cui, C.; Guo, R.; Tang, H.; Xiao, H.; Zhou, M.; Qin, W.; Wang, X.; et al. A porous self-healing hydrogel with an island-bridge structure for strain and pressure sensors. J Mater Chem B 2021, 9, 719–730. [Google Scholar] [CrossRef]
- Pan, S.; Pei, Z.; Jing, Z.; Song, J.; Zhang, W.; Zhang, Q.; Sang, S. A highly stretchable strain sensor based on CNT/graphene/fullerene-SEBS. RSC Adv 2020, 10, 11225–11232. [Google Scholar] [CrossRef]
- Shi, J.; Li, X.; Cheng, H.; Liu, Z.; Zhao, L.; Yang, T.; Dai, Z.; Cheng, Z.; Shi, E.; Yang, L.; et al. Graphene reinforced carbon nanotube networks for wearable strain sensors. Advanced Functional Materials 2016, 26, 2078–2084. [Google Scholar] [CrossRef]
- Du, D.; Li, P.; Ouyang, J. Graphene coated nonwoven fabrics as wearable sensors. Journal of Materials Chemistry C 2016, 4, 3224–3230. [Google Scholar] [CrossRef]
- Li, S.; Xia, H.; Xu, Y.; Lv, C.; Wang, G.; Dai, Y.; Sun, H. Gold nanoparticle densely packed micro/nanowire-based pressure sensors for human motion monitoring and physiological signal detection. Nanoscale 2019, 11, 4925–4932. [Google Scholar] [CrossRef] [PubMed]
- Zhao, S.; Ran, W.; Wang, D.; Yin, R.; Yan, Y.; Jiang, K.; Lou, Z.; Shen, G. 3D dielectric layer enabled highly sensitive capacitive pressure sensors for wearable electronics. ACS Appl Mater Interfaces 2020, 12, 32023–32030. [Google Scholar] [CrossRef] [PubMed]
- Yu, P.; Liu, W.; Gu, C.; Cheng, X.; Fu, X. Flexible piezoelectric tactile sensor array for dynamic three-axis force measurement. Sensors (Basel) 2016, 16. [Google Scholar] [CrossRef] [PubMed]
- Zhao, H.; O’Brien, K.; Li, S.; Shepherd, R.F. Optoelectronically innervated soft prosthetic hand via stretchable optical waveguides. Sci Robot 2016, 1. [Google Scholar] [CrossRef]
- Wang, S.; Xu, J.; Wang, W.; Wang, G.-J.N.; rastak, r.; molina-Lopez, F.; chung, J.W.; Niu, S.; Feig, V.r.; Lopez, e.; et al. Skin electronics from scalable fabrication of an intrinsically stretchable transistor array. Nature 2018, 555, 83–88. [Google Scholar] [CrossRef]
- Ge, J.; Sun, L.; Zhang, F.-R.; Zhang, Y.; Shi, L.; Zhao, H.; Zhu, H.; Jiang, H.; Yu, S. A Stretchable electronic fabric artificial skin with pressure-, lateral strain-, and flexion-sensitive properties. Adv Mater 2016, 28, 722–728. [Google Scholar] [CrossRef]
- Li, Y.; Lan, L.; Sun, S.; Lin, Z.; Gao, P.; Song, W.; Song, E.; Zhang, P.; Peng, J. All inkjet-printed metal-oxide thin-film transistor array with good stability and uniformity using surface-energy patterns. ACS Appl Mater Interfaces 2017, 9, 8194–8200. [Google Scholar] [CrossRef]
- Tang, L.; Mou, L.; Zhang, W.; Jiang, X. Large-Scale fabrication of highly elastic conductors on a broad range of surfaces. ACS Appl Mater Interfaces 2019, 11, 7138–7147. [Google Scholar] [CrossRef]
- Yoon, S.; Kim, H.-K. Cost-effective stretchable Ag nanoparticles electrodes fabrication by screen printing for wearable strain sensors. Surface and Coatings Technology 2020, 384. [Google Scholar] [CrossRef]
- Muth, J.T.; Vogt, D.M.; Truby, R.L.; Mengüç, Y.i.; Kolesky, D.B.; Wood, R.J.; Lewis, J.A. Embedded 3D printing of strain sensors within highly stretchable elastomers. Adv Mater 2014, 26, 6307–6312. [Google Scholar] [CrossRef]
- Tanaka, H. Epitaxial growth of oxide films and nanostructures. In Handbook of Crystal Growth; 2015; pp. 555–604. [Google Scholar]
- Zhang, Z.; Lin, P. Chapter 7—Noble metal nanoparticles: Synthesis, and biomedical implementations. In Emerging Applications of Nanoparticles and Architecture Nanostructures; Barhoum, A., Makhlouf, A.S.H., Eds.; Elsevier: Amsterdam, The Netherlands, 2018; pp. 177–233. [Google Scholar] [CrossRef]
- Vladimirsky, Y. 10—Lithography. In Vacuum Ultraviolet Spectroscopy; Samson, J.A.R., Ederer, D.L., Eds.; Academic Press: Burlington, 1999; pp. 205–223. [Google Scholar] [CrossRef]
- Bae, S.-H.; Lee, Y.; Sharma, B.K.; Lee, H.-J.; Kim, J.-H.; Ahn, J.-H. Graphene-based transparent strain sensor. Carbon 2013, 51, 236–242. [Google Scholar] [CrossRef]
- Ning, H.; Tao, R.; Fang, Z.; Cai, W.; Chen, J.; Zhou, Y.; Zhu, Z.; Zheng, Z.; Yao, R.; Xu, M.; et al. Direct patterning of silver electrodes with 2.4mum channel length by piezoelectric inkjet printing. J Colloid Interface Sci 2017, 487, 68–72. [Google Scholar] [CrossRef]
- Kim, N.; Um, H.-D.; Choi, I.; Kim, K.-H.; Seo, K. 18.4%-Efficient heterojunction Si solar cells using optimized ITO/Top electrode. ACS Appl Mater Interfaces 2016, 8, 11412–11417. [Google Scholar] [CrossRef] [PubMed]
- Lee, H.S.; Woo, S.I. Nanometer-thick amorphous-SnO2 layer as an oxygen barrier coated on a transparent AZO electrode. Electronic Materials Letters 2016, 12, 499–505. [Google Scholar] [CrossRef]
- Mustonen, T.; Kordás, K.; Saukko, S.; Tóth, G.; Penttilä, J.S.; Helistö, P.; Seppä, H.; Jantunen, H. Inkjet printing of transparent and conductive patterns of single-walled carbon nanotubes and PEDOT-PSS composites. physica status solidi (b) 2007, 244, 4336–4340. [Google Scholar] [CrossRef]
- Shimoni, A.; Azoubel, S.; Magdassi, S. Inkjet printing of flexible high-performance carbon nanotube transparent conductive films by "coffee ring effect". Nanoscale 2014, 6, 11084–11089. [Google Scholar] [CrossRef] [PubMed]
- Gorkina, A.L.; Tsapenko, A.P.; Gilshteyn, E.P.; Koltsova, T.S.; Larionova, T.V.; Talyzin, A.; Anisimov, A.S.; Anoshkin, I.V.; Kauppinen, E.I.; Tolochko, O.V.; et al. Transparent and conductive hybrid graphene/carbon nanotube films. Carbon 2016, 100, 501–507. [Google Scholar] [CrossRef]
- Shen, W.; Zhang, X.; Huang, Q.; Xu, Q.; Song, W. Preparation of solid silver nanoparticles for inkjet printed flexible electronics with high conductivity. Nanoscale 2014, 6, 1622–1628. [Google Scholar] [CrossRef]
- Chang, Y.; Wang, D.; Tai, Y.; Yang, Z. Preparation, characterization and reaction mechanism of a novel silver-organic conductive ink. Journal of Materials Chemistry 2012, 22. [Google Scholar] [CrossRef]
- Tao, Y.; Li, J.; Li, K.; Wang, H.; Chen, P.; Duan, Y.; Chen, Z.; Liu, Y.; Wang, H.; Duan, Y. Inkjet-printed Ag grid combined with Ag nanowires to form a transparent hybrid electrode for organic electronics. Organic Electronics 2017, 41, 179–185. [Google Scholar] [CrossRef]
- Kiran Kumar, A.B.V.; wan Bae, C.; Piao, L.; Kim, S.-H.; Kumar, A.B.V.K.; Bae, C.w.; Piao, L.; Kim, S.-H. Silver nanowire based flexible electrodes with improved properties: High conductivity, transparency, adhesion and low haze. Materials Research Bulletin 2013, 48, 2944–2949. [Google Scholar] [CrossRef]
- Hermerschmidt, F.; Burgués-Ceballos, I.; Savva, A.; Sepos, E.D.; Lange, A.; Boeffel, C.; Nau, S.; List-Kratochvil, E.J.W.; Choulis, S.A. High performance indium tin oxide-free solution-processed organic light emitting diodes based on inkjet-printed fine silver grid lines. Flexible and Printed Electronics 2016, 1. [Google Scholar] [CrossRef]
- Tian, B.; Liu, Q.; Luo, C.; Feng, Y.; Wu, W. Multifunctional ultrastretchable printed soft electronic devices for wearable applications. Advanced Electronic Materials 2019, 6. [Google Scholar] [CrossRef]
- Liu, Y.; Shi, X.; Liu, S.; Li, H.; Zhang, H.; Wang, C.; Liang, J.; Chen, Y. Biomimetic printable nanocomposite for healable, ultrasensitive, stretchable and ultradurable strain sensor. Nano Energy 2019, 63. [Google Scholar] [CrossRef]
- Tian, B.; Yao, W.; Zeng, P.; Li, X.; Wang, H.; Liu, L.; Feng, Y.; Luo, C.; Wu, W. All-printed, low-cost, tunable sensing range strain sensors based on Ag nanodendrite conductive inks for wearable electronics. Journal of Materials Chemistry C 2019, 7, 809–818. [Google Scholar] [CrossRef]
- Yang, H.; Leow, W.R.; Chen, X. 3D printing of flexible electronic devices. Small Methods 2018, 2. [Google Scholar] [CrossRef]
- Liu, C.; Huang, N.; Xu, F.; Tong, J.; Chen, Z.; Gui, X.; Fu, Y.; Lao, C. 3D printing technologies for flexible tactile sensors toward wearable electronics and electronic skin. Polymers (Basel) 2018, 10. [Google Scholar] [CrossRef]
- Christ, J.F.; Aliheidari, N.; Pötschke, P.; Ameli, A. Bidirectional and Stretchable Piezoresistive Sensors Enabled by Multimaterial 3D Printing of Carbon Nanotube/Thermoplastic Polyurethane Nanocomposites. Polymers (Basel) 2018, 11. [Google Scholar] [CrossRef]
- Yin, X.; Zhang, Y.; Cai, X.; Guo, Q.; Yang, J.; Wang, Z. 3D printing of ionic conductors for high-sensitivity wearable sensors. Materials Horizons 2019, 6, 767–780. [Google Scholar] [CrossRef]
- Leigh, S.J.; Bradley, R.J.; Purssell, C.P.; Billson, D.R.; Hutchins, D.A. A simple, low-cost conductive composite material for 3D printing of electronic sensors. PLoS ONE 2012, 7, e49365. [Google Scholar] [CrossRef]
- Dipietro, L.; Sabatini, A.M.; Dario, P. A survey of Glove-Based systems and their applications. IEEE Transactions on Systems, Man, and Cybernetics, Part C (Applications and Reviews) 2008, 38, 461–482. [Google Scholar] [CrossRef]
- Premaratne, P. Historical Development of Hand Gesture Recognition. In Human Computer Interaction Using Hand Gestures; Premaratne, P., Ed.; Springer: Singapore, 2014; pp. 5–29. [Google Scholar]
- Zimmerman, T.G.; Lanier, J.; Blanchard, C.; Bryson, S.; Harvill, Y. A hand gesture interface device. In Proceedings of Proceedings of the SIGCHI/GI Conference on Human Factors in Computing Systems and Graphics Interface, Toronto, Ontario, Canada, 1986; Association for Computing Machinery. pp. 189–192. [Google Scholar] [CrossRef]
- Eglowstein, H. Reach out and touch your data. Byte 1990, 15, 283–290. [Google Scholar]
- LaViola, J. A survey of hand posture and gesture recognition techniques and technology.
- Krammer, W.; Missimer, J.H.; Habegger, S.; Pastore-Wapp, M.; Wiest, R.; Weder, B.J. Sensing form—Finger gaiting as key to tactile object exploration—A data glove analysis of a prototypical daily task. J Neuroeng Rehabil 2020, 17, 133. [Google Scholar] [CrossRef] [PubMed]
- Glauser, O.; Wu, S.; Panozzo, D.; Hilliges, O.; Sorkine-Hornung, O. Interactive hand pose estimation using a stretch-sensing soft glove. ACM Transactions on Graphics 2019, 38, 1–15. [Google Scholar] [CrossRef]
- Sundaram, S.; Kellnhofer, P.; Li, Y.; Zhu, J.Y.; Torralba, A.; Matusik, W.; Sundaram, S.; Kellnhofer, P.; Li, Y.; Zhu, J.; et al. Learning the signatures of the human grasp using a scalable tactile glove. Nature 2019, 569, 698–702. [Google Scholar] [CrossRef]
- Hang, C.; Zhao, X.; Xi, S.; Shang, Y.; Yuan, K.; Yang, F.; Wang, Q.; Wang, J.; Zhang, D.W.; Lu, H. Highly stretchable and self-healing strain sensors for motion detection in wireless human-machine interface. Nano Energy 2020, 76. [Google Scholar] [CrossRef]
- Maeder-York, P.; Polygerinos, P.; Holland, D.; Stirling, L.; Galloway, K.; Wee, C.; Walsh, C. Biologically inspired soft robot for thumb rehabilitation. In Proceedings of the ASME Design of Medical Devices Conference, 2014. [Google Scholar] [CrossRef]
- Jhang, L.-H.; Santiago, C.; Chiu, C.-S. Multi-sensor based glove control of an industrial mobile robot arm. In Proceedings of the International Automatic Control Conference, 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Pu, X.; Guo, H.; Tang, Q.; Chen, J.; Feng, L.; Liu, G.; Wang, X.; Xi, Y.; Hu, C.; Wang, Z. Rotation sensing and gesture control of a robot joint via triboelectric quantization sensor. Nano Energy 2018, 54, 453–460. [Google Scholar] [CrossRef]
- Aw, K.; Budd, J.; Wilshaw-Sparkes, T. Data glove using soft and stretchable piezoresistive sensors. Micromachines (Basel) 2022, 13. [Google Scholar] [CrossRef]
- Li, Y.; Yang, L.; He, Z.; Liu, Y.; Wang, H.; Zhang, W.; Teng, L.; Chen, D.; Song, G. Low-Cost data glove based on deep-learning-enhanced flexible multiwalled carbon nanotube sensors for real-time gesture recognition. Advanced Intelligent Systems 2022, 4. [Google Scholar] [CrossRef]
- Glauser, O.; Wu, S.; Panozzo, D.; Hilliges, O.; Sorkine-Hornung, O. A stretch-sensing soft glove for interactive hand pose estimation. In Proceedings of the ACM SIGGRAPH 2019 Emerging Technologies, 2019; pp. 1–2. [Google Scholar] [CrossRef]
- Kumar, S.; Sultan, M.J.; Ullah, A.; Zameer, S.; Siddiqui, S.; Sami, S.K.; Kumar, S.; Sultan, M.J.; Ullah, A.; Zameer, S.; et al. Human machine interface glove using piezoresistive textile based sensors. IOP Conference Series: Materials Science and Engineering 2018, 414. [Google Scholar] [CrossRef]
- Roda-Sales, A.; Sancho-Bru, J.L.; Vergara, M. Problems using data gloves with strain gauges to measure distal interphalangeal joints’ kinematics. Sensors (Basel) 2022, 22. [Google Scholar] [CrossRef] [PubMed]
- Dutta, D.; Aruchamy, S.; Mandal, S.; Sen, S. Poststroke grasp ability assessment using an intelligent data glove based on action research arm test: Development, algorithms, and experiments. IEEE Trans Biomed Eng 2022, 69, 945–954. [Google Scholar] [CrossRef] [PubMed]
- Burns, M.; Rosa, R.; Akmal, Z.; Conway, J.; Pei, D.; King, E.; Banerjee, N.; Vinjamuri, R. Design and implementation of an instrumented data glove that measures kinematics and dynamics of human hand. In Proceedings of the 43rd Annual International Conference of the IEEE Engineering in Medicine & Biology Society (EMBC) 2021, 2021; pp. 7229–7232. [Google Scholar] [CrossRef]
- Guo, K.; Zhang, S.; Zhao, S.; Yang, H. Design and manufacture of data gloves for rehabilitation training and gesture recognition based on flexible sensors. J Healthc Eng 2021, 2021, 6359403. [Google Scholar] [CrossRef] [PubMed]
- Huang, F.; Hu, J.; Yan, X.; Meng, F. High-linearity, ultralow-detection-limit, and rapid-response strain sensing yarn for data gloves. Journal of Industrial Textiles 2022, 51, 4554S–4570S. [Google Scholar] [CrossRef]
- Yu, H.; Zheng, D.; Liu, Y.; Chen, S.; Wang, X.; Peng, W. Data glove with self-compensation mechanism based on high-sensitive elastic fiber-optic sensor. Polymers (Basel) 2022, 15. [Google Scholar] [CrossRef]
- Wu, C.; Wang, K.; Cao, Q.; Fei, F.; Yang, D.; Lu, X.; Zeng, H.; Song, A. Development of a low-cost wearable data glove for capturing finger joint angles. Micromachines (Basel) 2021, 12. [Google Scholar] [CrossRef]
- Supuk, T.; Bajd, T.; Zanchi, V. Evaluation of hand grasping by instrumented glove. WSEAS Trans. Sys. Ctrl 2008, 3, 26–33. [Google Scholar]
- Connolly, J.; Condell, J.; Curran, K.; Gardiner, P. Improving data glove accuracy and usability using a neural network when measuring finger joint range of motion. Sensors (Basel) 2022, 22. [Google Scholar] [CrossRef]
- Yu, H.; Zheng, D.; Liu, Y.; Chen, S.; Wang, X.; Peng, W. Low-Cost self-calibration data glove based on space-division multiplexed flexible optical fiber sensor. Polymers (Basel) 2022, 14. [Google Scholar] [CrossRef]
- Li, Y.; Di, H.; Xin, Y.; Jiang, X. Optical fiber data glove for hand posture capture. Optik 2021, 233. [Google Scholar] [CrossRef]
- Clark, D.; Demmel, J.; Hong, J.J.; Lafferriere, G.; Salkind, L.; Tan, X. Teleoperation experiments with a Utah/MIT hand and a VPL DataGlove. proceedings of the NASA Conference on Space Telerobotics 1989, 5. [Google Scholar]
- Nassour, J.; Amirabadi, H.G.; Weheabby, S.; Ali, A.A.; Lang, H.; Hamker, F. A robust data-driven soft sensory glove for human hand motions identification and replication. IEEE Sensors Journal 2020, 20, 12972–12979. [Google Scholar] [CrossRef]
- Pan, J.; Luo, Y.; Li, Y.; Tham, C.-K.; Heng, C.-H.; Thean, A.V.-Y. A wireless multi-channel capacitive sensor system for efficient glove-based gesture recognition with AI at the edge. IEEE Transactions on Circuits and Systems II: Express Briefs 2020, 67, 1624–1628. [Google Scholar] [CrossRef]
- Maitrea, J.; Rendua, C.e.; Boucharda, K.e.; Boucharda, B.; Gabourya, S.e. Basic daily activity recognition with a data. Procedia Computer Science 2019, 151, 108–115. [Google Scholar] [CrossRef]
- Maitre, J.; Rendu, C.; Bouchard, K.; Bouchard, B.; Gaboury, S. Object recognition in performed basic daily activities with a handcrafted data glove prototype. Pattern Recognition Letters 2021, 147, 181–188. [Google Scholar] [CrossRef]
- Lee, M.; Bae, J. Deep learning based real-time recognition of dynamic finger gestures using a data glove. IEEE Access 2020, 8, 219923–219933. [Google Scholar] [CrossRef]
- Ayodele, E.; Bao, T.; Zaidi, S.; Hayajneh, A.; Scott, J.; Zhang, Z.; McLernon, D. Grasp classification with weft knit data glove using a convolutional neural network. IEEE Sensors Journal 2021, 21, 10824–10833. [Google Scholar] [CrossRef]
- Huang, X.; Wang, Q.; Zang, S.; Wan, J.; Yang, G.; Huang, Y.; Ren, X. Tracing the motion of finger joints for gesture recognition via sewing RGO-coated fibers onto a textile glove. IEEE Sensors Journal 2019, 19, 9504–9511. [Google Scholar] [CrossRef]
- Siomau, M.; Jiang, N. Myoelectric control of artificial limb inspired by quantum information processing. Physica Scripta 2015, 90. [Google Scholar] [CrossRef]
- Lopes, P.A.; Paisana, H.; Almeida, A.T.D.; Majidi, C.; Tavakoli, M. Hydroprinted electronics: Ultrathin stretchable Ag-in-Ga E-Skin for bioelectronics and human-machine interaction. ACS Appl Mater Interfaces 2018, 10, 38760–38768. [Google Scholar] [CrossRef]
- Huang, Z.; Hao, Y.; Li, Y.; Hu, H.; Pan, T.; Gu, Y.; Chen, Y.; Zhang, T.; Li, W.; Wang, C.; et al. Three-dimensional integrated stretchable electronics. Nature Electronics 2018, 1, 473–480. [Google Scholar] [CrossRef]
- Leigh, S.-w.; Maes, P. Body Integrated Programmable Joints Interface. In Proceedings of the 2016 CHI Conference Extended Abstracts on Human Factors in Computing Systems, 2016; pp. 3719–3722. [Google Scholar] [CrossRef]
- Fatimah, B.; Singh, P.; Singhal, A.; Pachori, R.B. Hand movement recognition from sEMG signals using Fourier decomposition method. Biocybernetics and Biomedical Engineering 2021, 41, 690–703. [Google Scholar] [CrossRef]
- Campbell, E.; Chang, J.; Phinyomark, A.; Scheme, E. A comparison of amputee and able-bodied inter-subject variability in myoelectric control. Electrical Engineering and Systems Science 2020. [Google Scholar] [CrossRef]
- Alam, S.; Kabir, M.S.; Hossain, M.N.; Hasnaine, Q.R.; Alam, M.G.R. Classification accuracy comparison between machine learning algorithms and a deep learning algorithm in predicting hand gestures. In Proceedings of the 32nd Conference of Open Innovations Association (FRUCT), 2022; pp. 22–29. [Google Scholar] [CrossRef]
- Lucas, M.-F.; Gaufriau, A.; Pascual, S.; Doncarli, C.; Farina, D.; Lucas, M.-F.o.; Gaufriau, A.; Pascual, S.; Doncarli, C.; Farina, D. Multi-channel surface EMG classification using support vector machines and signal-based wavelet optimization. Biomedical Signal Processing and Control 2008, 3, 169–174. [Google Scholar] [CrossRef]
- Alkan, A.; Günay, M. Identification of EMG signals using discriminant analysis and SVM classifier. Expert Systems with Applications 2012, 39, 44–47. [Google Scholar] [CrossRef]
- Ulvi, B.; Selcuk, V.H.; Yusuf, S.V. Performance comparison of artificial neural network and gaussian mixture model in classifyinghand motions by using sEMG signals. Biocybernetics and Biomedical Engineering 2013, 33, 33–45. [Google Scholar] [CrossRef]
- Marinelli, A.; Semprini, M.; Canepa, M.; Lombardi, L.; Stedman, S.; Bellingegni, A.D.; Chiappalone, M.; Laffranchi, M.; Gruppioni, E.; Michieli, L.D.; et al. Performance evaluation of pattern recognition algorithms for upper limb prosthetic applications. In Proceedings of the 2020 8th IEEE RAS/EMBS International Conference for Biomedical Robotics and Biomechatronics (BioRob), New York, NY, USA, 2022; pp. 471–476. [Google Scholar] [CrossRef]
- Ke, A.; Huang, J.; Wang, J.; He, J. Improving the robustness of human-machine interactive control for myoelectric prosthetic hand during arm position changing. Front Neurorobot 2022, 16, 853773. [Google Scholar] [CrossRef]
- Zheng, Y.; Hu, X. Real-time isometric finger extension force estimation based on motor unit discharge information. J Neural Eng 2019, 16, 066006. [Google Scholar] [CrossRef]
- Shahzaib, M.; Shakil, S. Hand electromyography circuit and signals classification using artificial neural network. In Proceedings of the 2018 14th International Conference on Emerging Technologies (ICET) Islamabad, Pakistan, 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Sharma, S.; Gupta, R.; Kumar, A. Trbaggboost: An ensemble-based transfer learning method applied to Indian Sign Language recognition. Journal of Ambient Intelligence and Humanized Computing 2020, 13, 3527–3537. [Google Scholar] [CrossRef]
- Jiralerspong, T.; Nakanishi, E.; Liu, C.; Ishikawa, J. Experimental study of real-time classification of 17 voluntary movements for multi-degree myoelectric prosthetic hand. Applied Sciences 2017, 7. [Google Scholar] [CrossRef]
- Liu, J.; Sheng, X.; Zhang, D.; He, J.; Zhu, X. Reduced daily recalibration of myoelectric prosthesis classifiers based on domain adaptation. IEEE J Biomed Health Inform 2016, 20, 166–176. [Google Scholar] [CrossRef] [PubMed]
- Castellini, C.; Smagt, P.v.d. Surface EMG in advanced hand prosthetics. Biol Cybern 2009, 100, 35–47. [Google Scholar] [CrossRef] [PubMed]
- He, M.; Zheng, Y.; Ma, C.; Wu, K.; Li, G.; Fang, P. Simultaneous estimation of grip force and wrist angles by surface electromyography and acceleration signals. Biomedical Signal Processing and Control 2023, 79. [Google Scholar] [CrossRef]
Figure 1.
Examples of robotic applications in various domains. (a) Reprinted from [7], copyright (1992), with permission from IEEE Xplore. (b) Reprinted from [8], copyright (2016), with permission from IEEE Xplore. (c) Reprinted from [9], copyright (2005), with permission from MCB. (d) Reprinted from [10], copyright (2005), with permission from IEEE Xplore. (e) Reprinted from [11], copyright (2017), with permission from IEEE Xplore. (f) Reprinted from [6], copyright (2010), with permission from IEEE Xplore. (g) Reprinted from [12], copyright (2008), with permission from Elsevier. (h) Reprinted from [13], copyright (2009), with permission from IEEE Xplore. (i) Reprinted from [14], copyright (2016), with permission from IEEE Xplore.
Figure 1.
Examples of robotic applications in various domains. (a) Reprinted from [7], copyright (1992), with permission from IEEE Xplore. (b) Reprinted from [8], copyright (2016), with permission from IEEE Xplore. (c) Reprinted from [9], copyright (2005), with permission from MCB. (d) Reprinted from [10], copyright (2005), with permission from IEEE Xplore. (e) Reprinted from [11], copyright (2017), with permission from IEEE Xplore. (f) Reprinted from [6], copyright (2010), with permission from IEEE Xplore. (g) Reprinted from [12], copyright (2008), with permission from Elsevier. (h) Reprinted from [13], copyright (2009), with permission from IEEE Xplore. (i) Reprinted from [14], copyright (2016), with permission from IEEE Xplore.
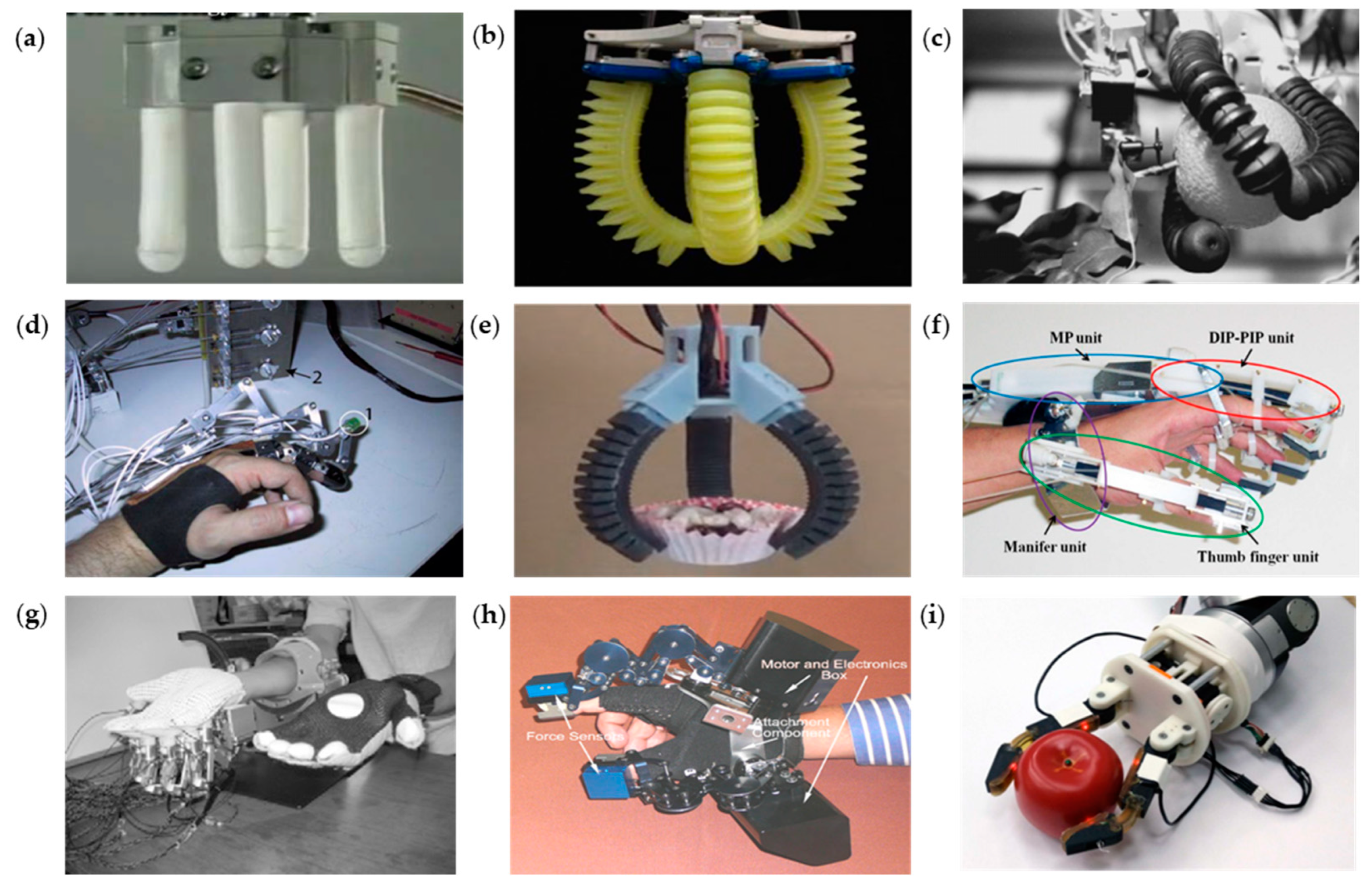
Figure 2.
Literature growth trend of manipulator control research using flexible sensors over the years.
Figure 2.
Literature growth trend of manipulator control research using flexible sensors over the years.
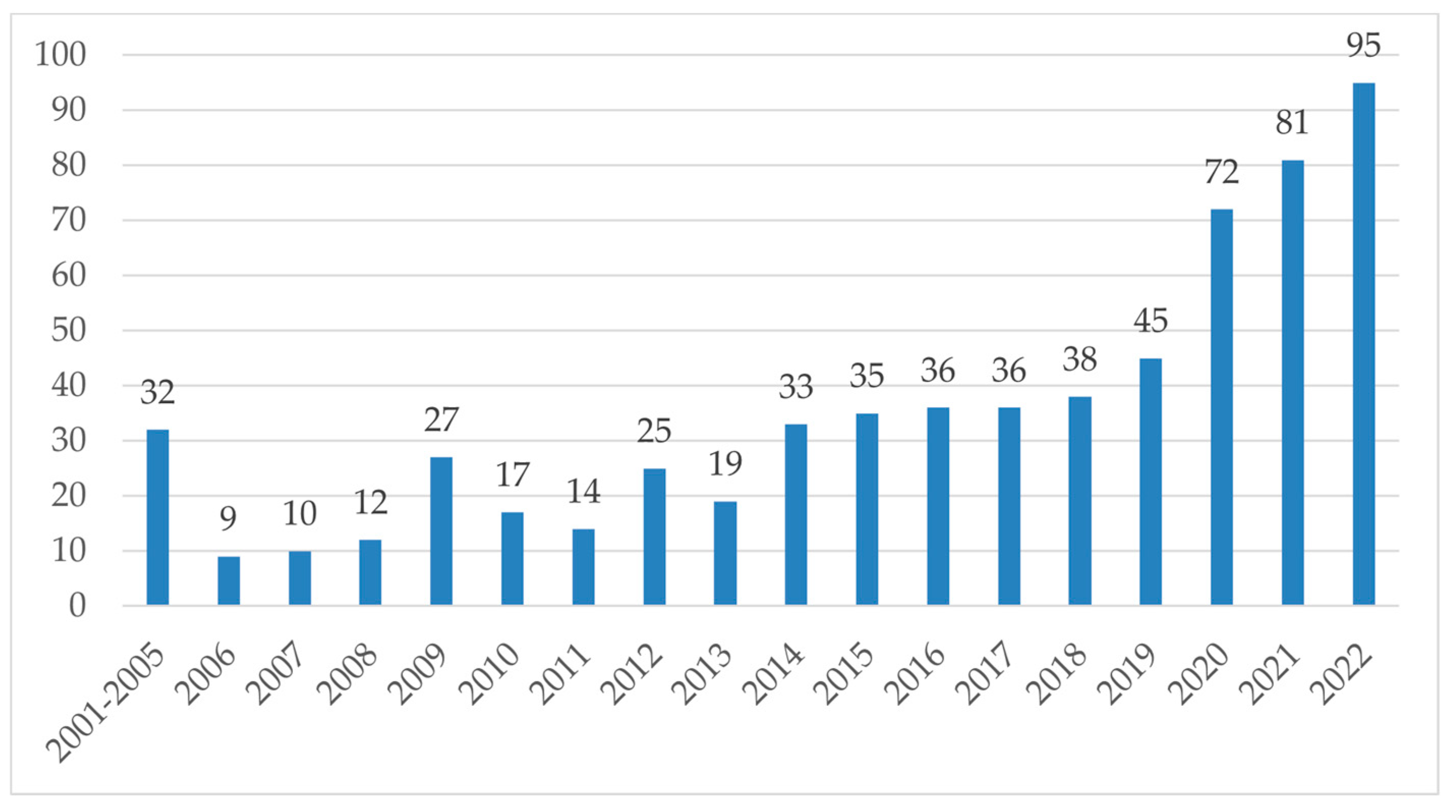
Figure 3.
Component modules of the flexible sensor and the materials commonly used in each module. Part of the figure is reprinted from [16], copyright (2019), with permission from ACS Publications.
Figure 3.
Component modules of the flexible sensor and the materials commonly used in each module. Part of the figure is reprinted from [16], copyright (2019), with permission from ACS Publications.
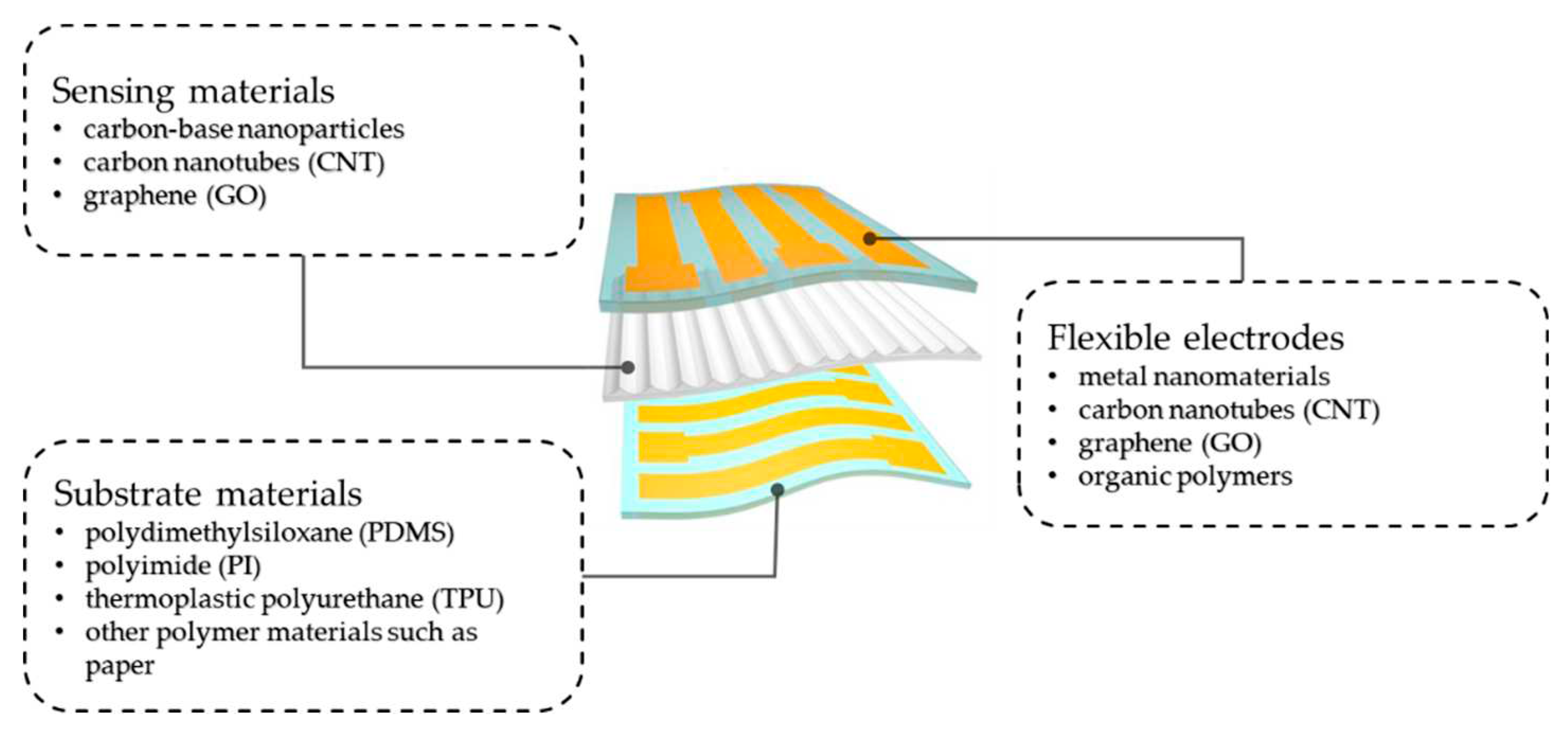
Figure 4.
Research examples of sensors based on PDMS substrates, in which (a) is the photograph of a flexible sensor attached to a human chest to measure respiratory rhythms, reprinted from [16], copyright (2019), with permission from ACS Publications. (b) shows the triboelectric tactile sensor based on wrinkled PDMS/MXene composite films, reprinted from [33], copyright (2020), with permission from Elsevier. (c) shows the self-healing of the PDMS-MPU0.4-IU0.6 film, which can take place even under water, reprinted from [34], copyright (2018), with permission from Wiley. (d) shows the performance of the self-adhesive strain sensor on a finger, reprinted from [19], copyright (2016), with permission from Wiley. (e) is the schematic illustration of the polyimide (PI) encapsulated crack sensor, reprinted from [34], copyright (2018), with permission from Applied Sciences. (f) shows the sensing application of the TPU/CB strain sensor in human motion, reprinted from [35], copyright (2021), with permission from PubMed Central. (g) is the photograph of CNT/TPU strain sensor fixed on the index finger, reprinted from [36], copyright (2019), with permission from ACS Publications. (h) is the photograph of human motion monitoring with the strain sensor, reprinted from [37], copyright (2017), with permission from ACS Publications. (i) are the optical images of the cured film before and after stretching, reprinted from [38], copyright (2010), with permission from ACS Publications.
Figure 4.
Research examples of sensors based on PDMS substrates, in which (a) is the photograph of a flexible sensor attached to a human chest to measure respiratory rhythms, reprinted from [16], copyright (2019), with permission from ACS Publications. (b) shows the triboelectric tactile sensor based on wrinkled PDMS/MXene composite films, reprinted from [33], copyright (2020), with permission from Elsevier. (c) shows the self-healing of the PDMS-MPU0.4-IU0.6 film, which can take place even under water, reprinted from [34], copyright (2018), with permission from Wiley. (d) shows the performance of the self-adhesive strain sensor on a finger, reprinted from [19], copyright (2016), with permission from Wiley. (e) is the schematic illustration of the polyimide (PI) encapsulated crack sensor, reprinted from [34], copyright (2018), with permission from Applied Sciences. (f) shows the sensing application of the TPU/CB strain sensor in human motion, reprinted from [35], copyright (2021), with permission from PubMed Central. (g) is the photograph of CNT/TPU strain sensor fixed on the index finger, reprinted from [36], copyright (2019), with permission from ACS Publications. (h) is the photograph of human motion monitoring with the strain sensor, reprinted from [37], copyright (2017), with permission from ACS Publications. (i) are the optical images of the cured film before and after stretching, reprinted from [38], copyright (2010), with permission from ACS Publications.
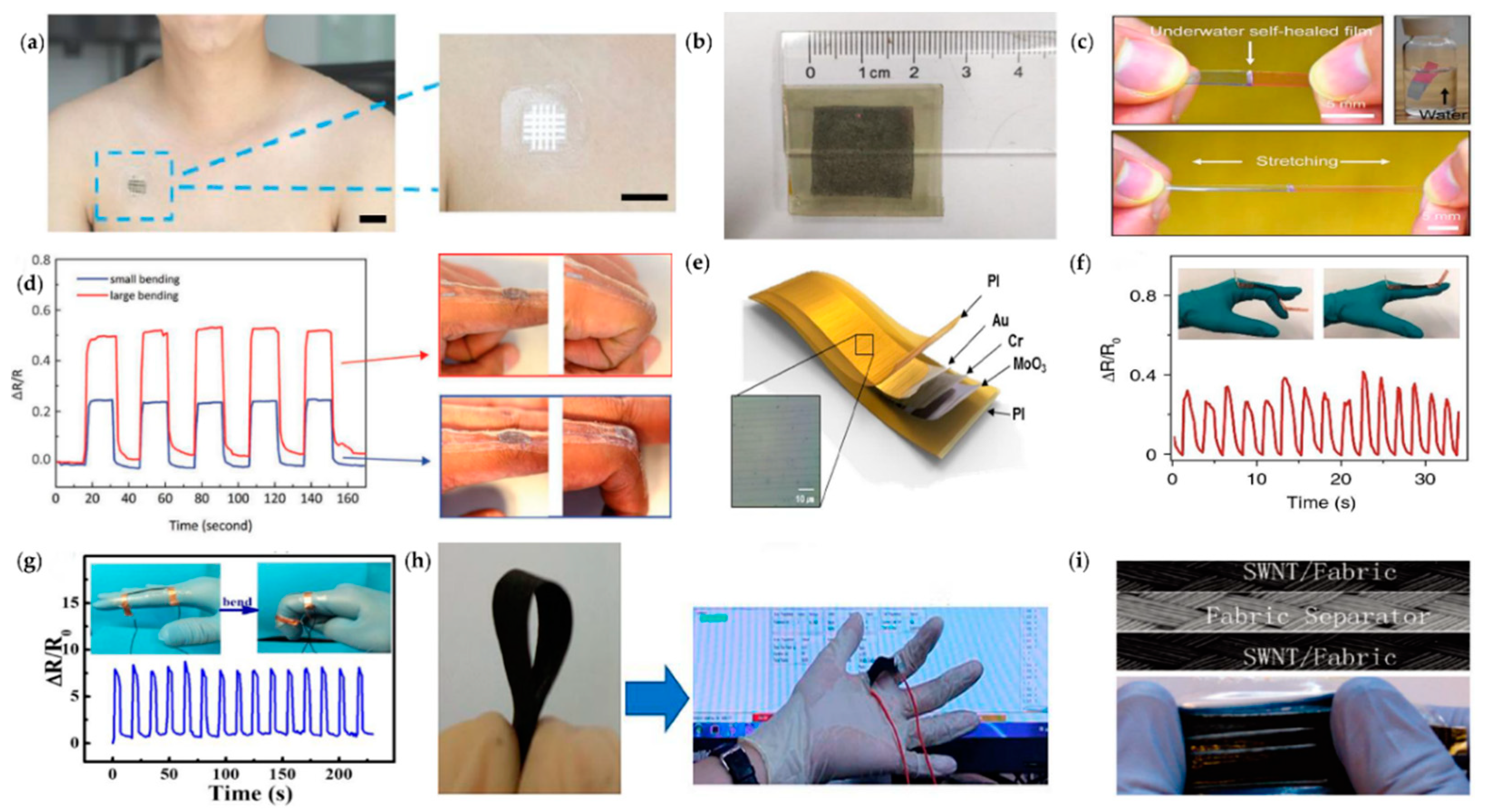
Figure 5.
Example of a carbon nanotube-based sensor application. (a) is the optical photograph of the as-synthesized VACNT/PDMS thin-film sensor, reprinted from [46], copyright (2021), with permission from ACS Publications. (b) is the photograph of the 3D graphene films used for rapid finger bending detection, reprinted from [48], copyright (2018), with permission from Wiley. (c) Schematic illustration of the assembly of graphene and QDs on a flexible substrate, reprinted from [49], copyright (2019), with permission from Science Advances. (d) shows the relative change in sensor resistance with finger bending, reprinted from [50], copyright (2018), with permission from Elsevier. (e) shows the graphene paper pressure sensor with excellent sensitivity, reprinted from [51], copyright (2017), with permission from ACS Publications. (f) shows the photos of the strain sensor on the index finger, reprinted from [52], copyright (2020), with permission from Wiley. (g) shows the photograph of the schematic of the whole sensor system with illustration of the magnified image, reprinted from [53], copyright (2019), with permission from PubMed Central. (h) is the photograph of the transparent and stretchable capacitive touch sensor, reprinted from [54], copyright (2017), with permission from American Chemical Society. (i) is the photograph of five stretchable strain sensors attached to the finger joints of the glove, reprinted from [55], copyright (2015), with permission from American Chemical Society.
Figure 5.
Example of a carbon nanotube-based sensor application. (a) is the optical photograph of the as-synthesized VACNT/PDMS thin-film sensor, reprinted from [46], copyright (2021), with permission from ACS Publications. (b) is the photograph of the 3D graphene films used for rapid finger bending detection, reprinted from [48], copyright (2018), with permission from Wiley. (c) Schematic illustration of the assembly of graphene and QDs on a flexible substrate, reprinted from [49], copyright (2019), with permission from Science Advances. (d) shows the relative change in sensor resistance with finger bending, reprinted from [50], copyright (2018), with permission from Elsevier. (e) shows the graphene paper pressure sensor with excellent sensitivity, reprinted from [51], copyright (2017), with permission from ACS Publications. (f) shows the photos of the strain sensor on the index finger, reprinted from [52], copyright (2020), with permission from Wiley. (g) shows the photograph of the schematic of the whole sensor system with illustration of the magnified image, reprinted from [53], copyright (2019), with permission from PubMed Central. (h) is the photograph of the transparent and stretchable capacitive touch sensor, reprinted from [54], copyright (2017), with permission from American Chemical Society. (i) is the photograph of five stretchable strain sensors attached to the finger joints of the glove, reprinted from [55], copyright (2015), with permission from American Chemical Society.
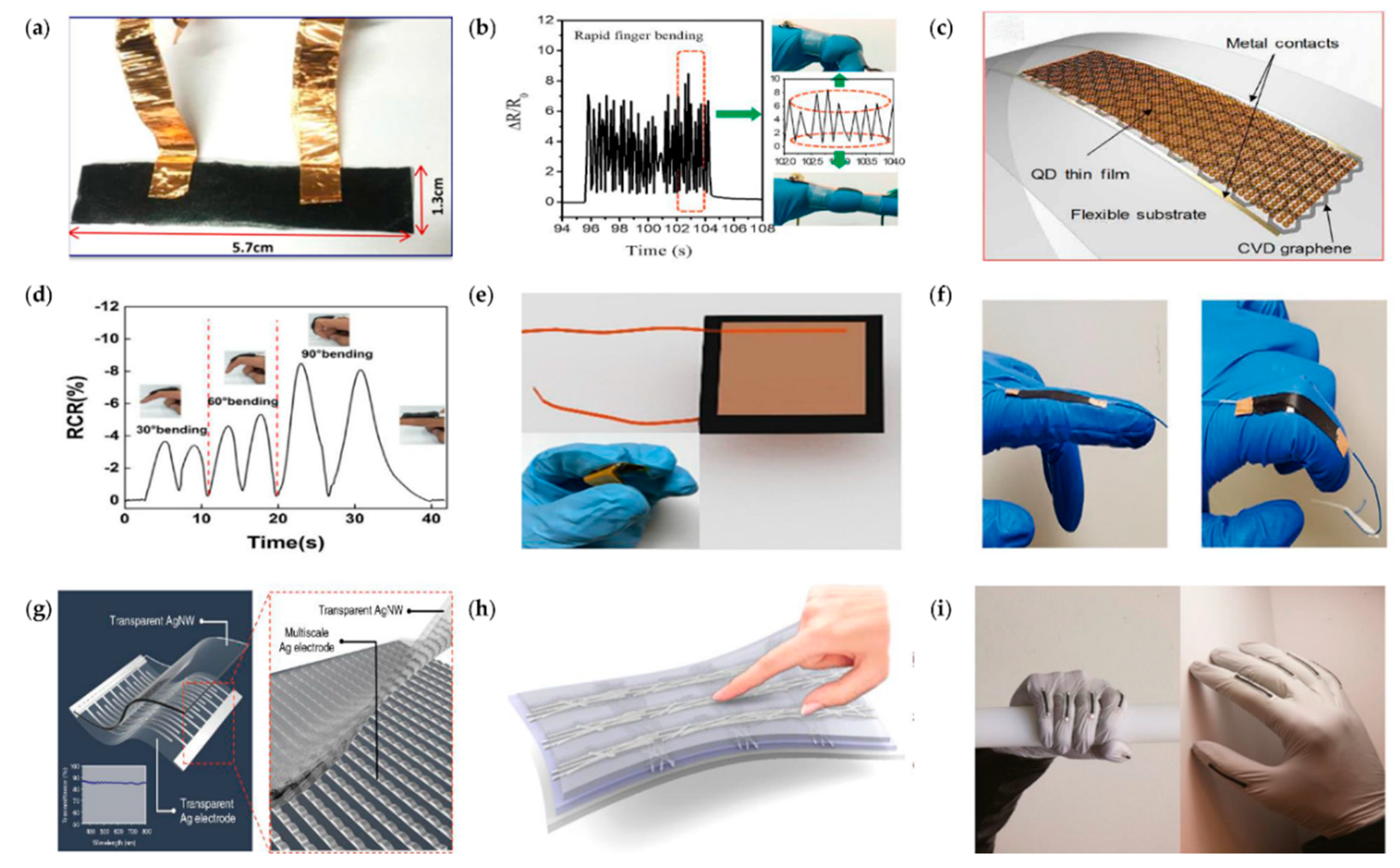
Figure 6.
Different process methods for the preparation flexible sensors for the detection of finger movements. (a) Dipping and coating, reprinted from [50], copyright (2018), with permission from Elsevier. (b) Lithography, reprinted from [20], copyright (2021), with permission from PubMed Central. (c) Inkjet printing, reprinted from [71], copyright (2017), with permission from American Chemical Society. (d) Screen printing. reprinted from [72], copyright (2019), with permission from American Chemical Society. (e) Screen printing. reprinted from [73], copyright (2019), with permission from Elsevier. (f) 3D printing, reprinted from [74], copyright (2014), with permission from Wiley.
Figure 6.
Different process methods for the preparation flexible sensors for the detection of finger movements. (a) Dipping and coating, reprinted from [50], copyright (2018), with permission from Elsevier. (b) Lithography, reprinted from [20], copyright (2021), with permission from PubMed Central. (c) Inkjet printing, reprinted from [71], copyright (2017), with permission from American Chemical Society. (d) Screen printing. reprinted from [72], copyright (2019), with permission from American Chemical Society. (e) Screen printing. reprinted from [73], copyright (2019), with permission from Elsevier. (f) 3D printing, reprinted from [74], copyright (2014), with permission from Wiley.
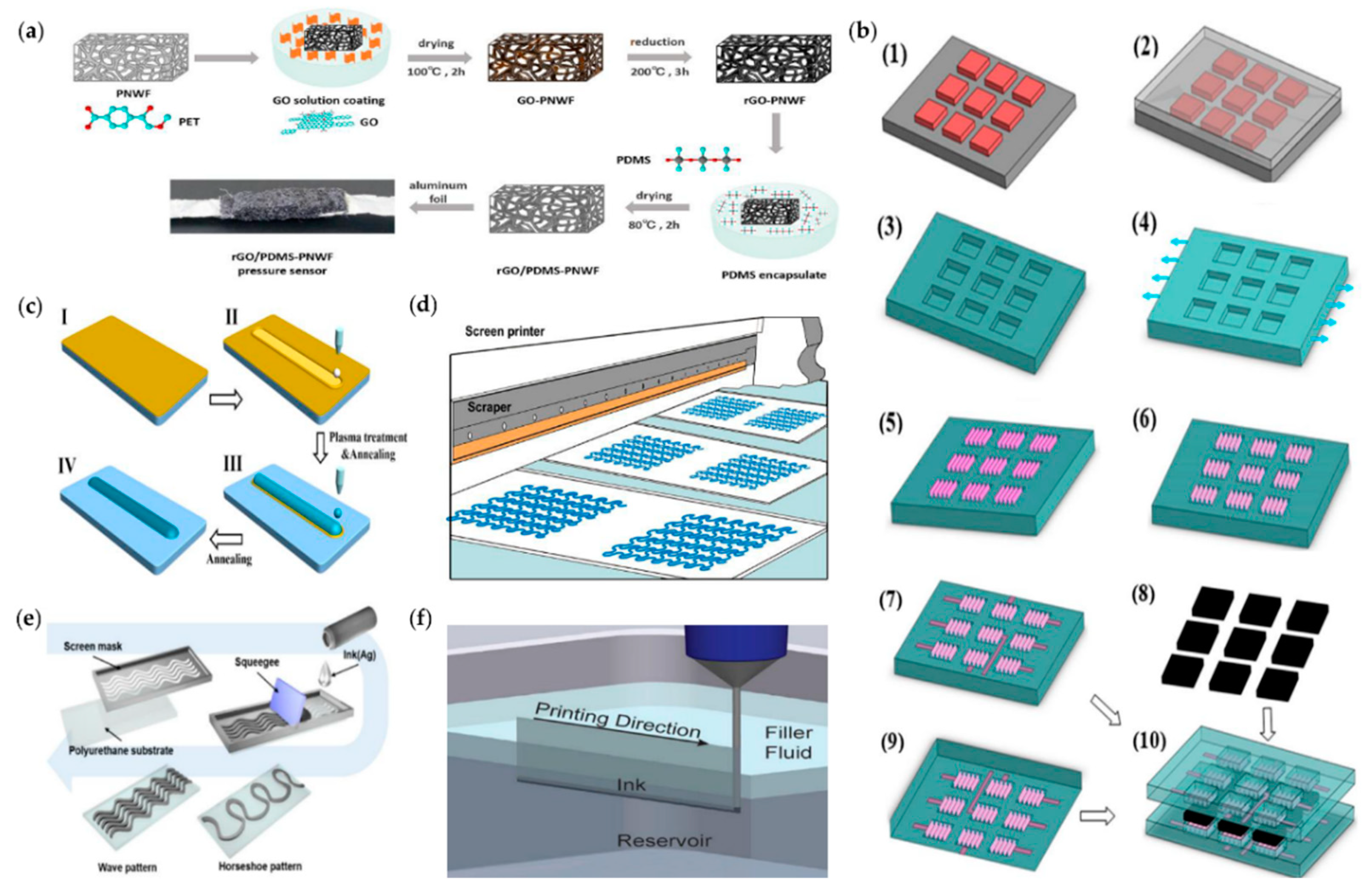
Figure 7.
Labels and locations of sensor of the VMG 30™ data glove proposed by Krammer et al. consisting of 29 sensors reprinted from [103], copyright (2020), with permission from PubMed Central.
Figure 7.
Labels and locations of sensor of the VMG 30™ data glove proposed by Krammer et al. consisting of 29 sensors reprinted from [103], copyright (2020), with permission from PubMed Central.
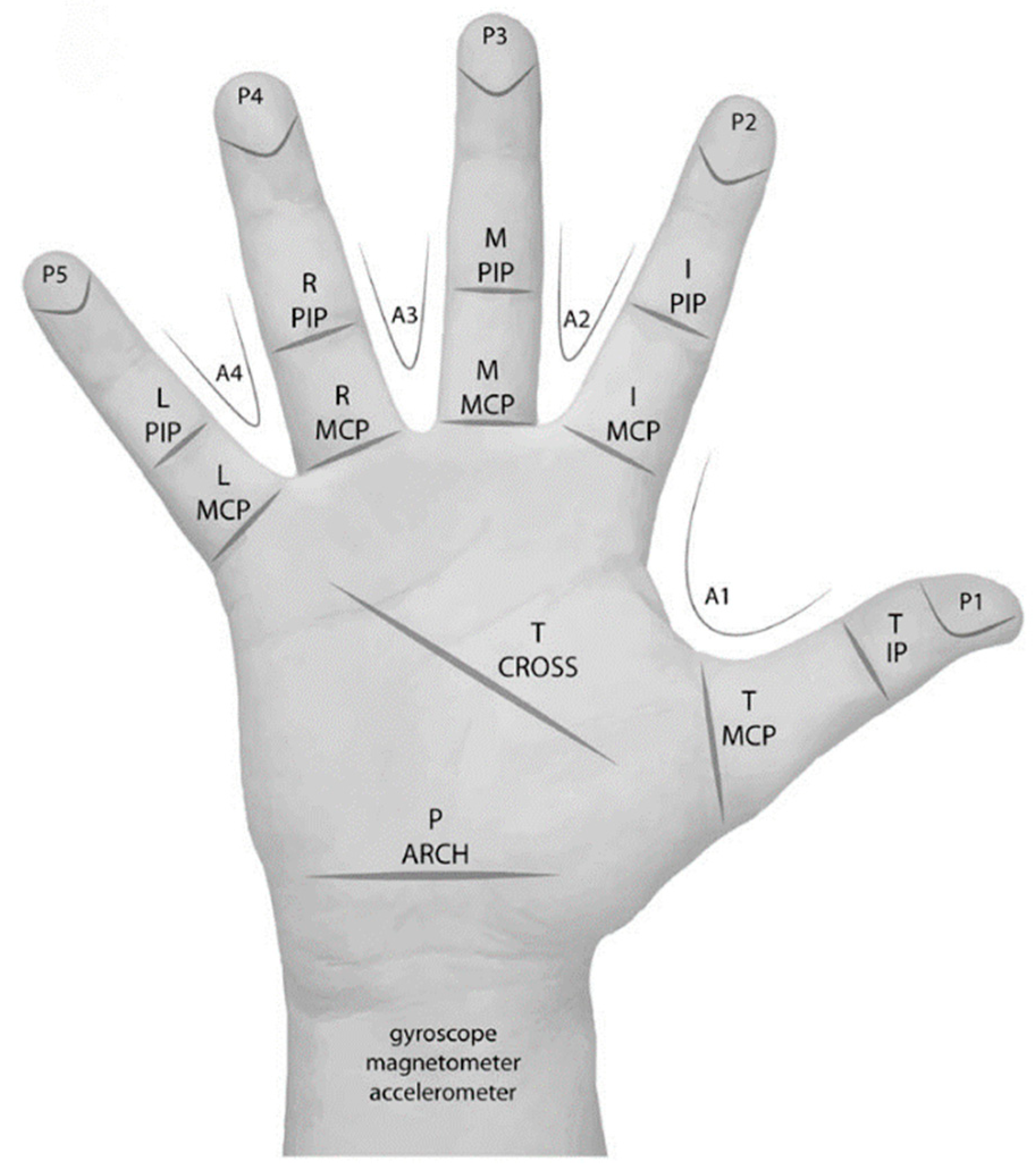
Figure 8.
The images of gesture recognition manipulators based on different sensor technologies. (a) reprinted from [126], copyright (2020), with permission from IEEE Xplore. (b) reprinted from [127], copyright (2020), with permission from IEEE Xplore. (c) reprinted from [129], copyright (2021), with permission from Elsevier. (d) reprinted from [130], copyright (2020), with permission from IEEE Xplore. (e) reprinted from [131], copyright (2021), with permission from IEEE Xplore. (f) reprinted from [132], copyright (2019), with permission from IEEE Xplore.
Figure 8.
The images of gesture recognition manipulators based on different sensor technologies. (a) reprinted from [126], copyright (2020), with permission from IEEE Xplore. (b) reprinted from [127], copyright (2020), with permission from IEEE Xplore. (c) reprinted from [129], copyright (2021), with permission from Elsevier. (d) reprinted from [130], copyright (2020), with permission from IEEE Xplore. (e) reprinted from [131], copyright (2021), with permission from IEEE Xplore. (f) reprinted from [132], copyright (2019), with permission from IEEE Xplore.
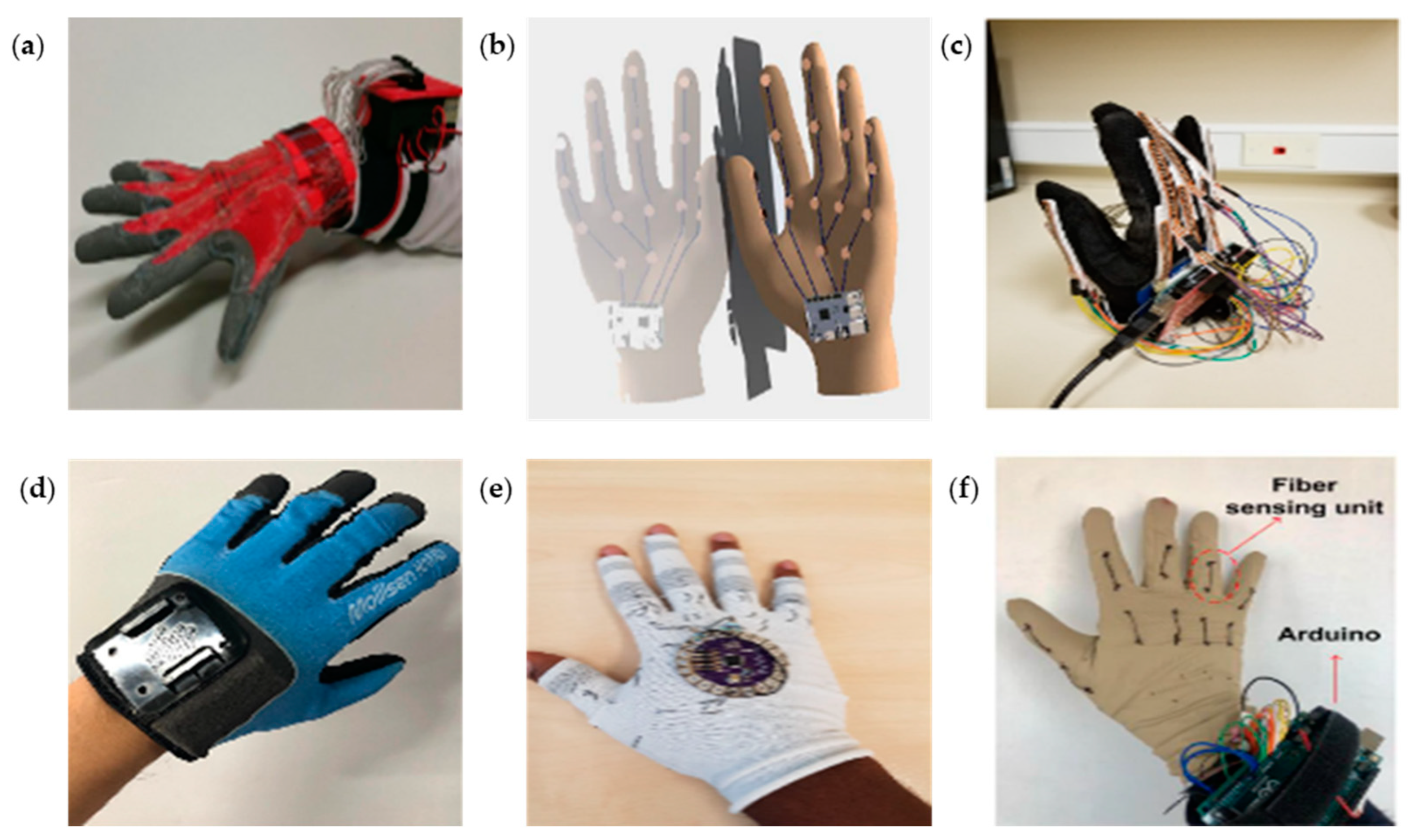
Figure 9.
EMG detection process.
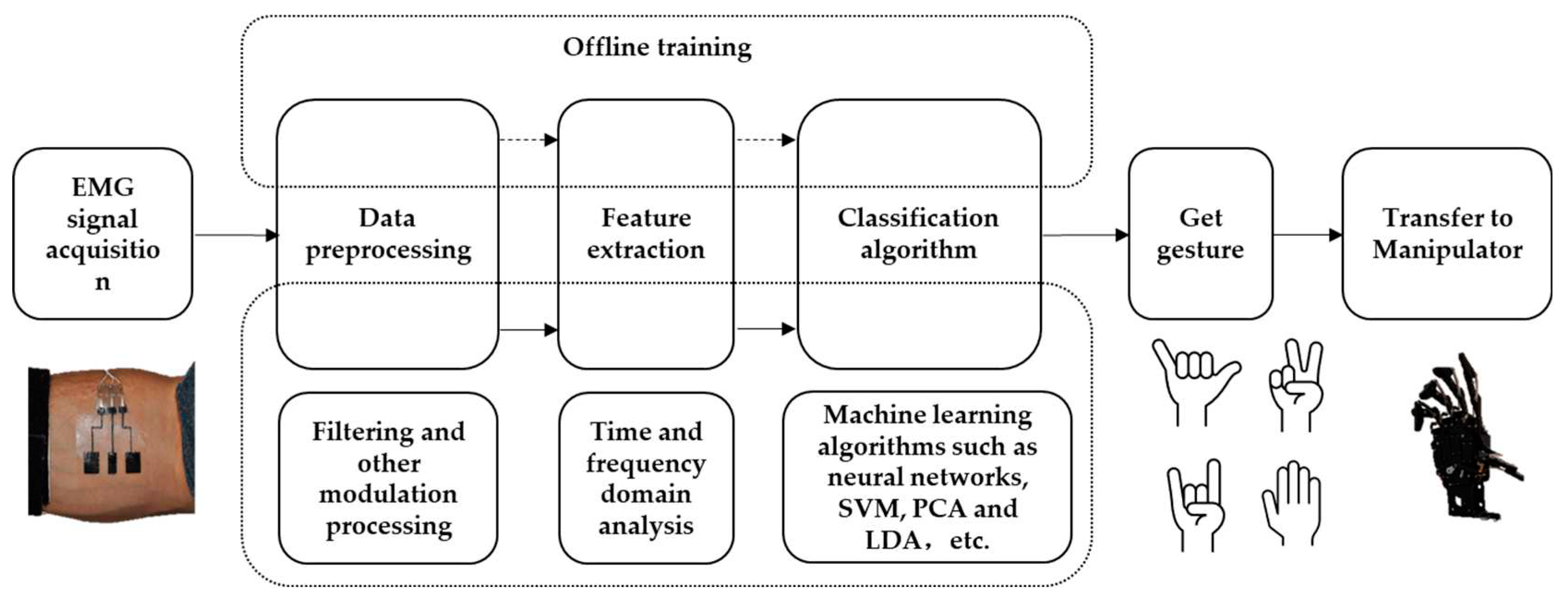

Table 1.
Comparison of three inkjet print materials.
| Type of material | Main materials | Advantage | Disadvantage | Reference |
|---|---|---|---|---|
| Transparent oxide ink | Tin doped indium oxide (ITO), Aluminum doped ZnO(AZO) | Good light transmission and stability | Not as conductive as metal | [71,80,81] |
| Carbon ink | CNT and GO |
Excellent performance, very Low sintering temperature, low material cost | Poor thermal stability and complicated process | [82,83,84] |
| Metallic ink | Gold, silver, copper, etc. | Comprehensive performance is the best | Relatively expensive | [85,86,87,88,89] |
Table 2.
Characteristic parameters of data gloves.
| Category of sensor technology | Main materials | Reference |
|---|---|---|
| Flexible strain/pressure sensor | Silicone and carbon black | A textile glove [104] |
| Mixture of Ecoflex 00-30 and carbon black nanoparticles | Data glove [110] | |
| Multiwalled carbon nanotube | Data glove [111] | |
| Silicone resin | A textile base glove [112] | |
| Piezoresistive yarn | Human Machine Interface Glove [113] | |
| Elasticized fabric | CyberGlove [114] | |
| Polyamide/Lycra | SensoriGlove [115] | |
| NinjaFlex | Data glove [116] | |
| GO | Data glove [117] | |
| AgNPs/DCY composite yarn | A electronic data glove [118] | |
| Flexible fiber optic sensor | Flexible grating strip | Data glove [119] |
| Flexible grating strip | Data glove [120] | |
| Optical fiber | 5DT Data glove [121] | |
| LED phototransistor | 5DT Data glove [122] | |
| Flexible silicone rubber fiber | Data glove [123] | |
| Plastic multimode Fiber CK-20 | Data glove [124] | |
| Optical fiber cable | VPL Data glove [125] |
Table 3.
Accuracy of different classifiers used to classify EMG.
| Images of the EMG collector | Method of classification | Recognition accuracy | Reference |
|---|---|---|---|
 |
NLR classifier | 99% | reprinted from [143], copyright (2020), with permission from IEEE Xplore. |
 |
RNN, Knowledge based post-processing model (Sequential decision algorithm) |
4% better than the others | reprinted from [144], copyright (2022), with permission from PubMed Central. |
 |
Fast Independent component Analysis (FastICA) algorithm | real-time decomposition 86% offline decomposition94% |
reprinted from [145], copyright (2019), with permission from IOP Science. |
 |
scaled conjugate algorithm Levenberg algorithm |
96.8% 98.8% |
reprinted from [146], copyright (2022), with permission from IETE Journal of Research. |
 |
Trbaggboost algorithm | 97.04% | reprinted from [147], copyright (2020), with permission from Springer Nature. |
 |
ANN | 83% | reprinted from [148], copyright (2017), with permission from Applied Sciences. |
 |
LDA | able-bodied 95% amputee 87% |
reprinted from [149], copyright (2016), with permission from IEEE Xplore. |
 |
SVM | 87.88% | reprinted from [150], copyright (2008), with permission from Springer Link |
 |
95.32± 1.35% | reprinted from [151], copyright (2022), with permission from Elsevier. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



