
Submitted:
06 July 2023
Posted:
07 July 2023
You are already at the latest version
Abstract
Background: The Stability Index estimation algorithm was derived and applied to develop and implement a balance ability diagnosis system that can be used at daily life. Methods: The system integrated an approach based on sensory function interaction, called the clinical test of sensory interaction with balance (CTSIB). The piezo-resistive force mat was fabricated, and a Stability Index prediction algorithm was developed and applied using the center of pressure (CoP) variables. The Stability Index prediction algorithm derived a CoP variable for 103 elderly people by Nintendo Wii Balance Board (WBB) to predict the Stability Index of the Balance System (Biodex SD). And, the accuracy was confirmed through the correlation between the real and predicted value. Results: As a result of testing with the test-set, the linear regression model confirmed that the r value ranged between 0.943 to 0.983. To confirm the similarity between the WBB and flexible force mat, each measured CoP value was input and calculated into the developed regression model, and the result of the correlation coefficient validation confirmed an r value of 0.96. Conclusion: The system developed in this study will be applicable to the daily life of the home in the form of a floor mat.
Keywords:
Clinical test of sensory interactions with balance
; Stability Index
; Balance ability diagnosis
; force plate
; Machine learning
1. Introduction
As population aging is accelerating worldwide, demand for new proactive measures in social, economic, regional, and medical domains are increasing. Addressing social issues such as healthcare and welfare associated with the growing elderly population requires appropriate actions to extend lifespan and prevent diseases and disorders commonly experienced by older individuals. Aging and diseases often lead to reduced muscle strength and sensory function, causing a decline in physical motor and cognitive abilities among the elderly. Notably, diminished lower extremity muscle strength, vestibular function, and visual function contribute to falls and abnormal motor function. Reduced balance ability, i.e., a weakened capacity to maintain body position by keeping the center of gravity within specific boundaries, increases the risk of falls owing to an intricate interplay between the sensory and musculoskeletal systems [1]. Numerous methods have been developed to evaluate balance ability characteristics, particularly through dynamic functional assessment methods targeted at older adults. One such method is the one-leg standing (OLS) test, which measures the duration an individual can stand on one lower limb without support. The OLS test has been employed in diagnosing musculoskeletal ambulation disability symptom complex [2] and serves as a practical tool for frailty screening in the elderly. Another assessment technique is the Timed-up and go (TUG) test, which involves tasks such as sit-to-stand, walking a distance of 3 meters, turning, gait analysis, and returning to a seated position. Previous studies have established a correlation between gait kinematic variables measured during the TUG test and the Community Balance and Mobility Scale (CBMS) [3]. Dynamic functional evaluations like OLS and TUG are based on comprehensive perspectives, such as lower extremity muscle strength, rather than on sensory functions (e.g., vision and vestibular function) that directly affect balance ability. However, balance ability is a function of interaction between detailed sensory functions, hence, detailed methods to quantify balance ability are needed. One such evaluation tool is the Clinical Test of Sensory Interaction with Balance (CTSIB), which has been standardized to measure the sense of balance and behaviorally assess the processing of vestibular and proprioceptive senses [4]. Traditionally, the CTSIB records the duration of maintaining a standing posture under various vision conditions, vestibular sensory interferences, and proprioceptive sensory interferences. Recently, quantitative measurement methods considering the movement range have incorporated the use of Center of Mass (CoM) obtained through Inertia Measurement Units or Center of Pressure (CoP) derived from force plates. An example is the instrumented CTSIB (i-CTSIB), which has been used in clinical practice to measure CoP and calculate evaluation variables while maintaining standing balance. This method has been implemented through several commercial devices, such as the BODITRAK BALANCE Sensor [5], which generates a pressure map employing flexible sensors that are portable and adaptable to any surface. Another system, BTrackS™ (Balance Tracking Systems, Inc. USA) [6], employs a highly accurate force sensor enabling the evaluation of various aspects of balance ability. However, these commercial products typically require measurements to be conducted following procedures suggested by clinicians or professional assessors, thereby limiting their applicability for home visits or non-clinical settings. With the increasing elderly population, the capacity of the existing medical system to provide comprehensive care is approaching its limit [7]. Moreover, current evaluation methods often require direct visits to hospitals, leading to delayed assessments when balance ability has already significantly deteriorated. Consequently, there is a pressing need for a system that allows for easy and regular measurement of balance ability in everyday life [8]. Commercialized force plate products have the disadvantage of requiring the installation of a measuring device for each measurement, and there is a requirement for a measurement system that can be installed in the form of a floor mat in the home and used for general purposes in daily life. So, a measuring equipment that can be used at home and a diagnostic algorithm that guarantees measurement accuracy are required. Furthermore, such a system should be developed to virtual or augment reality in a non-face-to-face environment in the future so that it can be used for telemedicine diagnosis and treatment in a state where immersion is increased.
In this study, the Stability Index calculated from CoP was measured when performing CTSIB in the commercially available balance ability diagnosis system. This was defined as an individual balance ability score, and a machine learning-based balance ability evaluation algorithm was developed using various variables calculated from the CoP measured when performing CTSIB on a load cell-based force plate, Nintendo Wii Balance Board. In general, the Stability Index is simply calculated as the amount of movement of the AP and ML axes [9]. Therefore, more specifically, we develop a model to determine which CoP variables affect the Stability Index prediction algorithm. A piezo-resistive type ground reaction force measurement mat was developed, and a Stability Index estimation algorithm was applied. And its usability was confirmed through verification. This is aimed at identifying more detailed balance ability characteristics. In addition, the commercialized force plate has limitations such as area of use, hard material, and high price, so they are combined with entertainment, healthcare, VR, and AR at home, making them less useful for various purposes. The purpose of this derived system and algorithm is to make it possible to apply it to a virtual reality (VR) or augmented reality (AR) environment system with good immersion and accessibility in the future.
2. Materials and Methods
2.1. Study Procedure
In this study, to develop a balance diagnosis algorithm, the Stability Index was measured in a commercially available system for elderly people. To identify correlated variables and develop an algorithm for estimating this Stability Index, CoP measurement and variable calculation were performed while performing CTSIB on a commercially available force plate for the same subject. A regression equation for estimating the Stability Index was derived through various machine learning, and validation was performed by applying this regression equation model to the developed flexible force mat. And, it verified that the developed stability index algorithm can be applied to the developed force mat (Figure 1).
2.2. Development and Validation of Balance Ability Model
A total of 103 elderly individuals participated in the development of the balance ability evaluation model (27 males: age (79.78 ± 4.76) y; 81 females: age (77.73 ± 5.21) y). Initially, the Stability Index of each seven CTSIB conditions (Eye Open/Close with Firm, one-foam, two-foam and Eye Open-Down Count with Firm (50 to 0, subtract by 1)) were measured using the Balance System (Biodex SD) [9]. Subsequently, 30 s of data per CTSIB condition were collected using a commercially available force plate, Nintendo Wii Balance Board (Nintendo Inc., Kyoto, Japan), and the CoP values were calculated. The data-sets were processed for seven conditions across the 103 participants. To mitigate the high-frequency and low-frequency noise signals in the x- and y-axis components of the measured CoP data, trend factors were analyzed. Butterworth 4th order bandpass filtering (cut-off frequency: 0.1 Hz to 4 Hz) was then applied to the noise-removed CoP data [10]. Sway variables, which would serve as inputs for the machine learning model, were derived from the filtered CoP data (Figure 2).
Table 1 presents the 10 variables calculated from the time domain data, including the mean, mean path, mean distance, mean acceleration, ellipse area, high 5 %, low 5 %, center, and median frequency.
For the training and evaluation of the Stability Index estimation, the total data-set was divided into a 70 % training-set and a 30 % test-set. Four regression analyses were conducted: linear regression, support vector machine (SVM) regression, generalized additive model (GAM) regression, and tree regression. The training process was repeated five times using randomly selected training-sets, and the model's performance was assessed using the test-set [11]. The CoP variables measured when performing i-CTSIB on flexible force mat was used as an input value (x) for the model developed with a 70% training-set on 30% of the subjects left as a test-set. the Stability Index, which is a y-value, was calculated. The correlation coefficient (r-value) between the observed and predicted values of the response variable was computed to evaluate the model's accuracy.
2.3. Customized CoP Measurement System
The sensing mechanism employed a piezo-resistive design. Each sensor cell measured 21 mm x 36 mm x 2.5 mm, and a total of 3264 cells were arranged in a grid pattern measuring 68 x 48, resulting in a total size of 1530 mm x 1820 mm (Figure 3).
A. To enhance safety and prevent slippage when used by elderly individuals, a 15 mm thick safety mat made of PE material was affixed to the upper plate of the force mat. Power was supplied using DC 5.0 V, 2.0 A via a Micro USB connection. The data required for measurement was obtained through a dedicated PCB, with a sampling frequency of 23 Hz. The force range of the mat spanned from 10 kg to 100 kg. Communication between the force mat and the console PC was achieved using the USB-connected serial port communication method. The pressure distribution measured by the flexible force mat, when connected to the console PC, was visualized as an image representing the pressure distribution.
2.4. System and Algorithm Validation
To assess the similarity between the flexible force mat and the commercially available force plate WBB, a comparative verification experiment was conducted with 30 new participants (7 males and 23 females). The flexible force mat was positioned on the commercially available WBB, and CoP measurements were simultaneously collected. Using the same algorithm, variables were calculated based on the collected data. The Stability Index was then derived by inputting the calculated variables into the linear regression model that was ultimately selected. The similarity between the two devices was evaluated by conducting a correlation analysis (Pearson's r) between the Stability Indexes derived from the measurements obtained by both devices.
3. Results
3.1. Results of CoP Variables During CTSIB
Table 2 presents the CoP variables measured during the performance of CTSIB on a commercially available force plate, WBB. The results indicate that variables such as mean path, velocity, and distance showed an increasing trend when participants performed the task with their eyes closed and as the difficulty level of the standing posture increased.
3.2. Results of Stability Index Regression Model
The correlation coefficient (r-value) was calculated to determine the relationship between the observed stability index and the predicted Stability Index generated by the regression model. A regression model was developed using the training set, employing four types of regression models: linear regression, SVM, GAM, and regression tree. And, the Table 3 shows the results of validating the model with the test-set. All four regression models demonstrated a correlation coefficient (r-value) of 0.7 or higher, with a majority achieving high levels of accuracy at 0.8 and 0.9. Among these models, the Linear regression model exhibited the best performance, displaying r-values ranging from 0.943 to 0.983. An example graph of the real and predicted values of the test-set is shown in Figure 4.
To formulate the regression model that yielded the highest performance among the different regression models, beta and bias values for each CTSIB task condition were extracted and incorporated into the final formula (Figure 5).
3.3. Results of System and Algorithm Validation
To assess the similarity and accuracy between the WBB and the flexible force mat, a correlation analysis (Pearson's r) was conducted to compare the Stability Index values derived from the measured values. The analysis revealed a high correlation coefficient of 0.96 (Pearson's r, p<0.05, ɑ= 0.05).
4. Discussion
To validate the similarity between the load cell-based WBB force plate and the newly developed force mat, we evaluated the Stability Index estimation model results that calculated CoP data simultaneously measured by both systems. The results demonstrated high accuracy, with a correlation coefficient (r-value) of 0.96 between the values calculated from the linear regression model used to estimate the Stability Index. This indicates that, despite potential differences in unit and resolution of the measured force values, there is no statistically significant distinction in calculating the CoP, which is essential for accurate balance evaluation. Consequently, the reliability of the CTSIB-based balance ability evaluation using the force mat can be considered assured.
Previous studies have explored various endeavors to produce an inexpensive, portable, and flexible sensor-based force plate, akin to the system developed in our study, with the aim of utilizing it as a commercial force plate equivalent. Notably, these studies have demonstrated promising outcomes. For instance, one study employed a textile force mat system that wirelessly transmits pressure to confirm that there was no statistical difference in foot pressure compared to a commercial platform during walking and one-leg standing [12]. Another study investigated the feasibility of measuring ground reaction force by utilizing a graphene-based flexible sensor and acquiring walking data with a pressure sensor [13]. Although the shape and material composition of the force sensors differ, the findings indicate the potential for measuring walking and standing posture. The flexible nature of the sensor, allowing for folding or rolling, provides a distinct advantage over conventional thick and heavy force plates. This advantageous feature holds significant value in the implementation of XR system interfaces, offering enhanced accessibility at home, ease of setup, and cost-effectiveness. Moreover, an additional benefit lies in the capability of assessing balance ability using the XR system within the comfort of one's own home.
When it comes to sensor-based hardware, variations in materials and development methods may exist, but there are no discrepancies in the measured force or pressure values. Therefore, the crucial focus lies in developing a robust balance ability evaluation algorithm using such a system and ensuring its accuracy. Numerous methods are available for assessing balance ability, and among them, the CTSIB) evaluates balance performance based on sensory interaction and the time allocated for performing tasks under different sensory conditions. In recent years, research has progressed towards employing instrumented tests that quantitatively evaluate balance using center of pressure (CoP) variables measured and calculated with a force plate during CTSIB assessments. For instance, a study examined the stance postural control of ambulant children with cerebral palsy, utilizing CoP-derived variables such as velocity, range, and area to compare them with typically developing children [14]. Another study investigated the variations in CoP variables according to age group and different ground conditions during CTSIB [15]. These examples illustrate the potential for quantification, enabling independent evaluations and quantified scoring even without direct involvement from a balance tester.
To establish a mathematical model for balance evaluation based on the Stability Index, CoP variables were measured and calculated for elderly individuals. Various techniques were employed to develop regression models using these variables, and in most cases, high accuracy was achieved with correlation coefficients (r-values) of 0.7 or higher. Notably, both the linear regression model and the regression tree model consistently demonstrated high accuracy, exceeding 0.9 in all cases. The regression tree model functions by estimating the result value through averaging at the endpoint nodes, employing a predictive approach that creates splits based on predictors that minimize the sum of squared errors. In our study, considering the similar accuracy results obtained, we ultimately selected the linear regression model. This choice allows for the derivation of a simple equation-based formula and facilitates easier development and utilization of the algorithm.
Software programming was performed to establish the necessary connections between the hardware force mat and the developed algorithm, as well as to create a user-friendly graphical user interface (GUI) for presenting the resulting values. During the performance of the seven CTSIB tasks, CoP values were sequentially measured and stored. After completing the final measurement, these values were input into the Stability Index calculation algorithm, and the results were generated. The GUI consists of two main components: a visualization of the measured CoP trajectory and a display of the calculated and reported result values. The scores for each of the seven tasks allow for differentiation based on visual conditions (on/off) and task difficulty, reflecting the unique characteristics of each task (Figure 6). The overall Stability Index is presented as the mean value, and the balance ability assessment is designed to enable monitoring of score trends over time in connection with future balance training programs.
The ultimate goal of developing this balance ability assessment system is to incorporate features such as visual tilting to introduce vestibular interference and the option to block visual input using VR head-mounted displays (HMDs). Examining the application of XR systems, including the force mat developed in this study, the Virtual Reality Floor Mat Activity Region is an XR system that utilizes force plate technology and integrates with HMDs [16]. This setup provides a fully immersive experience, addressing real-world challenges faced by many VR users, while also ensuring safer gameplay in domestic environments. Similarly, the system developed in this study can be applied to provide immersive balance ability assessments and implement avatars in remote locations. Furthermore, due to its large-area force mat design, this system can facilitate dynamic motor function evaluations such as walking and timed up and go tests.
One limitation of this study is that it was not based on large-scale data, necessitating an optimization process for the algorithm. Addressing this limitation will involve accumulating a substantial amount of data for future analysis and improvement.
In this study, we developed a CTSIB-based balance ability evaluation system that can be conveniently conducted at home, outside of a clinical setting. This system was designed as an integral component of the XR environment with potential for scalability. By implementing the XR system composed of force mat, it becomes feasible to perform i-CTSIB measurements within head-mounted displays such as virtual reality and augmented reality, allowing for conditions such as visual-off and enabling an interaction-based measurement system for remote medical diagnosis. In future research, we plan to apply it to XR HMD to confirm its usability.
5. Conclusion
A linear regression model capable of estimating the feature Stability Index was developed based on CTSIB CoP measurement data of elderly subjects to evaluate the balance ability when performing CTSIB, and as a result of testing with the test-set, r-values of seven CTSIB tasks were obtained with values ranging from 0.943 to 0.983, confirming high prediction accuracy. The balance ability estimation model results similarity is confirmed that between the WBB and flexible force mat. The system developed in this study will be applicable to the daily life of the home in the form of a mat.
Author Contributions
Conceptualization, J.-W.S.; methodology, J.-W.S.; validation, J.I.K.; formal analysis, J.-W.S.; investigation, T.K.; Y.J.; resources, J.-W.S.; data curation, J.K.; K.-M.J.; writing—original draft preparation, J.-W.S.; writing—review and editing, J.-H.D.; supervision, J.-H.D. All authors have read and agreed to the published version of the manuscript.
Funding
This research was supported by National Research Council of Science and Technology (NST) funded by the Ministry of Science and ICT(MSIT), Republic of Korea (Grant No. CRC 21011).
Institutional Review Board Statement
The study was conducted according to the guidelines of the Declaration of Helsinki, and approved by the Institutional Review Board of Konkuk University (No.7001355-201505-HR-057).
Informed Consent Statement
Informed consent was obtained from all subjects involved in the study. And, written informed consent has been obtained from the patient(s) to publish this paper if applicable.
Data Availability Statement
The data presented in this study are available on request from the corresponding author.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Matsumura, B.A.; Ambrose, A.F. Balance in the elderly. Clin Geriatr Med. 2006, 22, 395–412. [Google Scholar] [CrossRef] [PubMed]
- Michikawa, T.; Nishiwaki, Y.; Takebayashi, T.; Toyama, Y. One-leg standing test for elderly populations. J Orthop Sci. 2009, 14, 675–685. [Google Scholar] [CrossRef] [PubMed]
- Bergquist, R.; Nerz, C.; Taraldsen, K.; Mellone, S.; Ihlen, E.A.F.; Vereijken, B.; Helbostad, J.L.; Becker, B.; Mikolaizak, A.S. Predicting advanced balance ability and mobility with an instrumented Timed Up and Go Test. Sensors. 2020, 3, 4987. [Google Scholar] [CrossRef] [PubMed]
- Cohen, H.S. A review on screening tests for vestibular disorders. J Neurophysiol. 2019, 1, 81–92. [Google Scholar] [CrossRef]
- https://www.boditrak.
- https://balancetrackingsystems.com/.
- Karatas, M.; Eriskin, L.; Deveci, M.; Pamucar, D.; Garg, H. Big Data for Healthcare Industry 4.0: Applications, challenges and future perspectives. Expert Syst. Appl. 2022, 200, 116912. [Google Scholar] [CrossRef]
- Jaberi, A.; Zahedian-Nasab, N.; Shirazi, F.; Kavousipor, S. Benefits of chair-based home exercises for physical fitness, activities of daily living, and balance status in older adults with balance disorder. Educ. Gerontol. 2022, 48, 41–53. [Google Scholar] [CrossRef]
- Arnold, B.L.; Schmitz, R.J. Examination of balance measures produced by the Biodex Stability system. J Athl Train. 1998, 33, 323–327. [Google Scholar]
- Severini, G.; Straudi, S.; Pavarelli, C.; Da Roit, M.; Martinuzzi, C.; Pizzongolo, L.D.; Basaglia, N. Use of Nintendo Wii Balance Board for posturographic analysis of Multiple Sclerosis patients with minimal balance impairment. J. Neuroeng. Rehabil. 2017, 11, 19. [Google Scholar] [CrossRef]
- Hussain, I.; Park, S.-J. Prediction of Myoelectric Biomarkers in Post-Stroke Gait. Sensors 2021, 21, 5334. [Google Scholar] [CrossRef]
- Saenz-Cogollo, J.F.; Pau, M.; Fraboni, B.; Bonfiglio, A. Pressure Mapping Mat for Tele-Home Care Applications. Sensors 2016, 16, 365. [Google Scholar] [CrossRef] [PubMed]
- Lou, C.; Wang, S.; Liang, T.; Pang, C.; Huang, L.; Run, M.; Liu, X. A Graphene-Based Flexible Pressure Sensor with Applications to Plantar Pressure Measurement and Gait Analysis. Materials 2017, 10, 1068. [Google Scholar] [CrossRef] [PubMed]
- Dewar, R.M.; Tucker, K.; Claus, A.P.; van den Hoorn, W.; Ware, R.S.; Johnston, L.M. Evaluating validity of the Kids-Balance Evaluation Systems Test (Kids-BESTest) Clinical Test of Sensory Integration of Balance (CTSIB) criteria to categorise stance postural control of ambulant children with CP. Disabil Rehabil 2021, 44, 4039–4046. [Google Scholar] [CrossRef] [PubMed]
- Chaikeeree, N.; Saengsirisuwan, V.; Chinsongkram, B.; Boonsinsukh, R. Interaction of age and foam types used in Clinical Test for Sensory Interaction and Balance (CTSIB). Gait Posture 2015, 41, 313–315. [Google Scholar] [PubMed]
- Patent: Microsoft Technology Licensing, LLC, Redmond, WA(US) Virtual Reality Floor Mat Activity Region. US2019/0302879 A1, 2019.
Figure 1.
Development and application of elderly balance ability diagnosis algorithm.
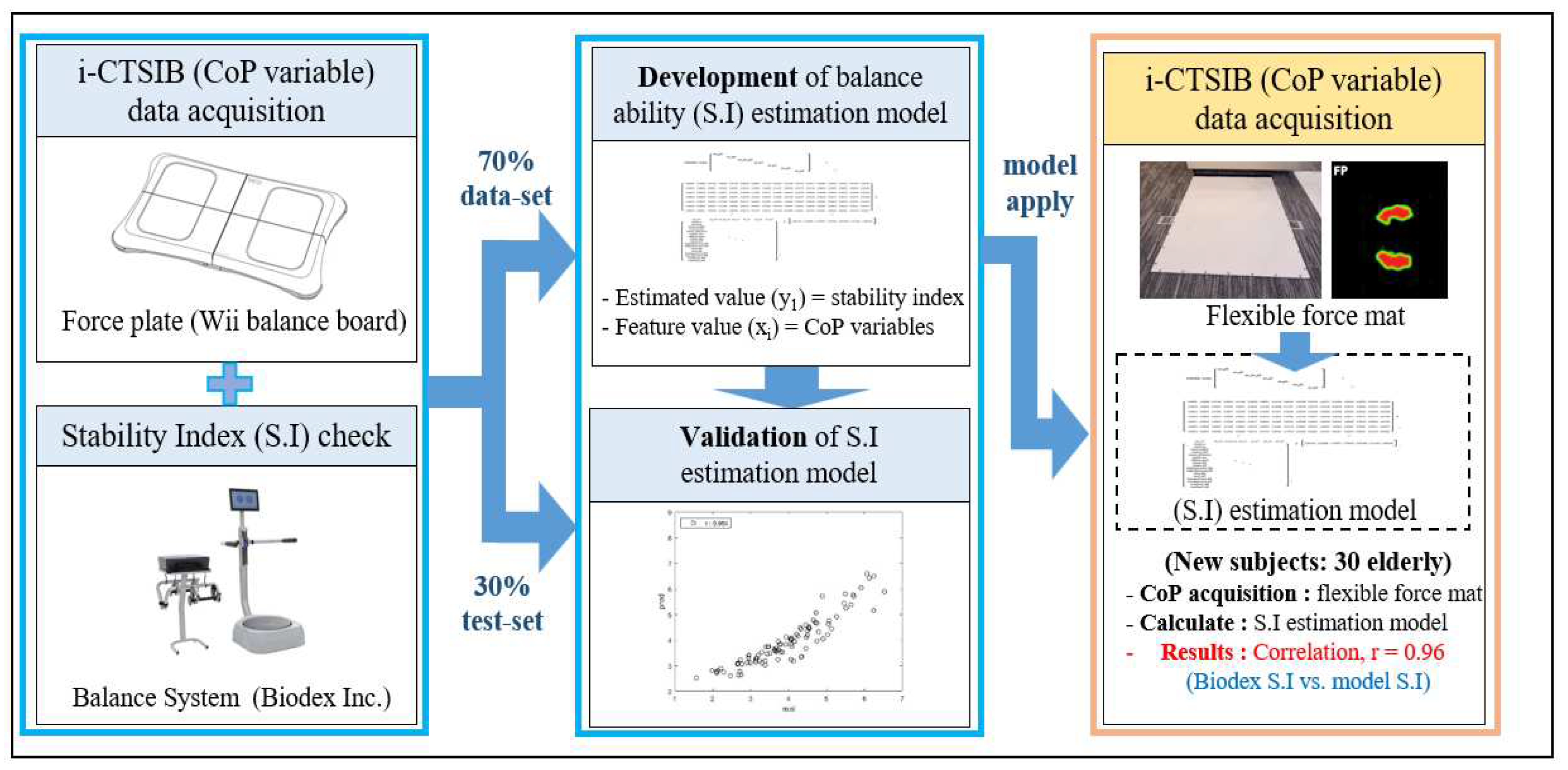
Figure 2.
Analysis of CoP feature measured by commercialized force plate.
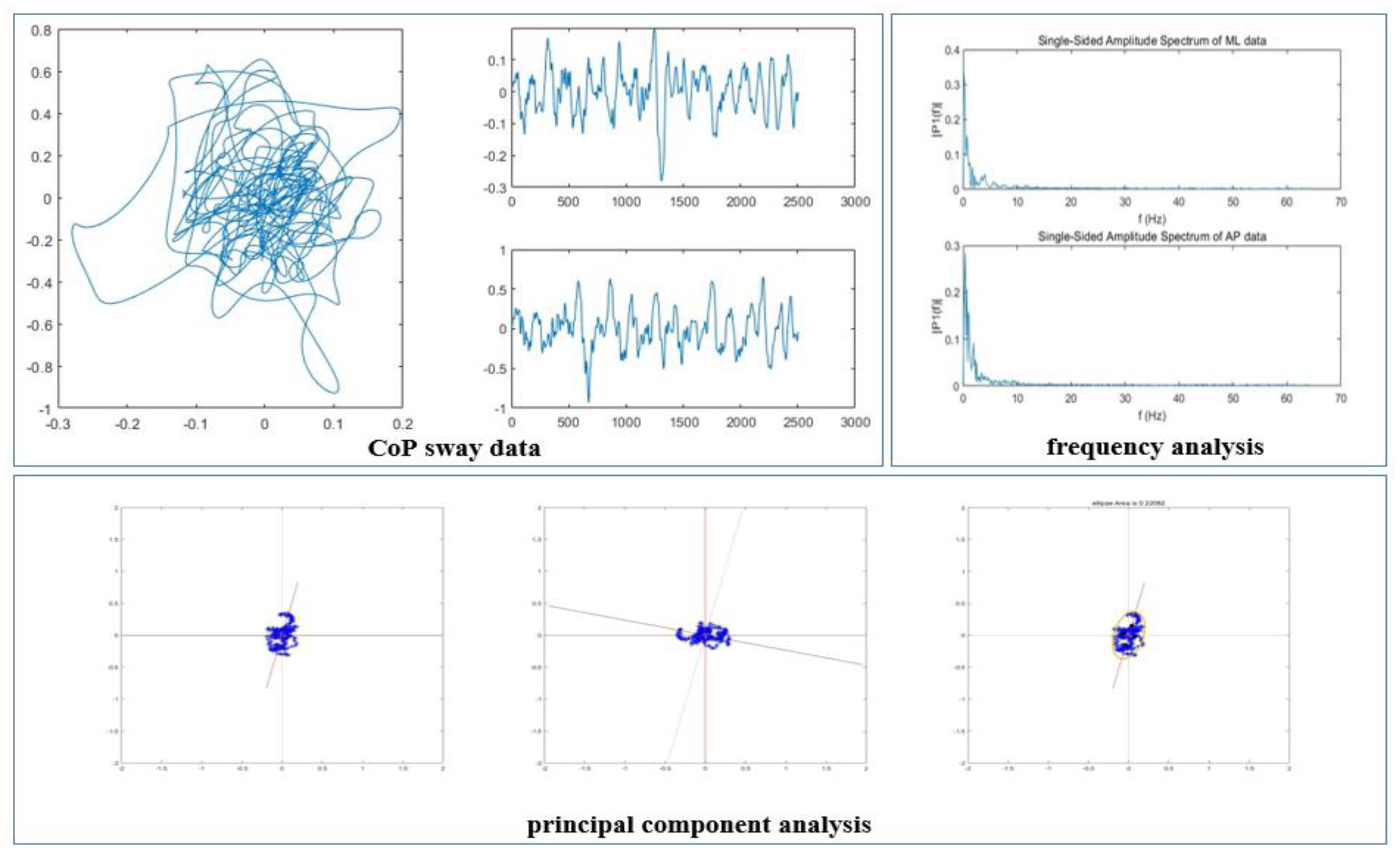
Figure 3.
Flexible force mat.
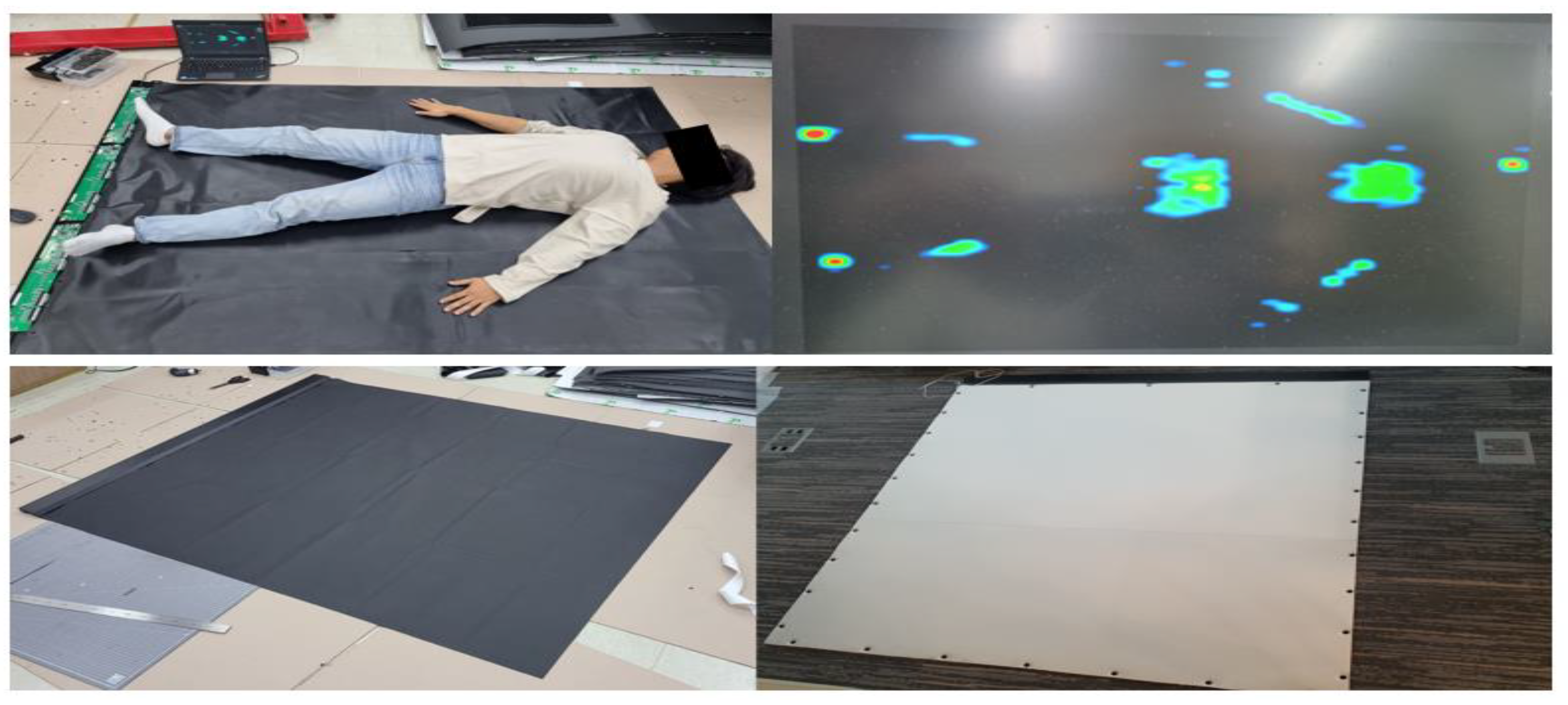
Figure 4.
Example of validation of linear regression model (example: Eye-Open, Firm condition).
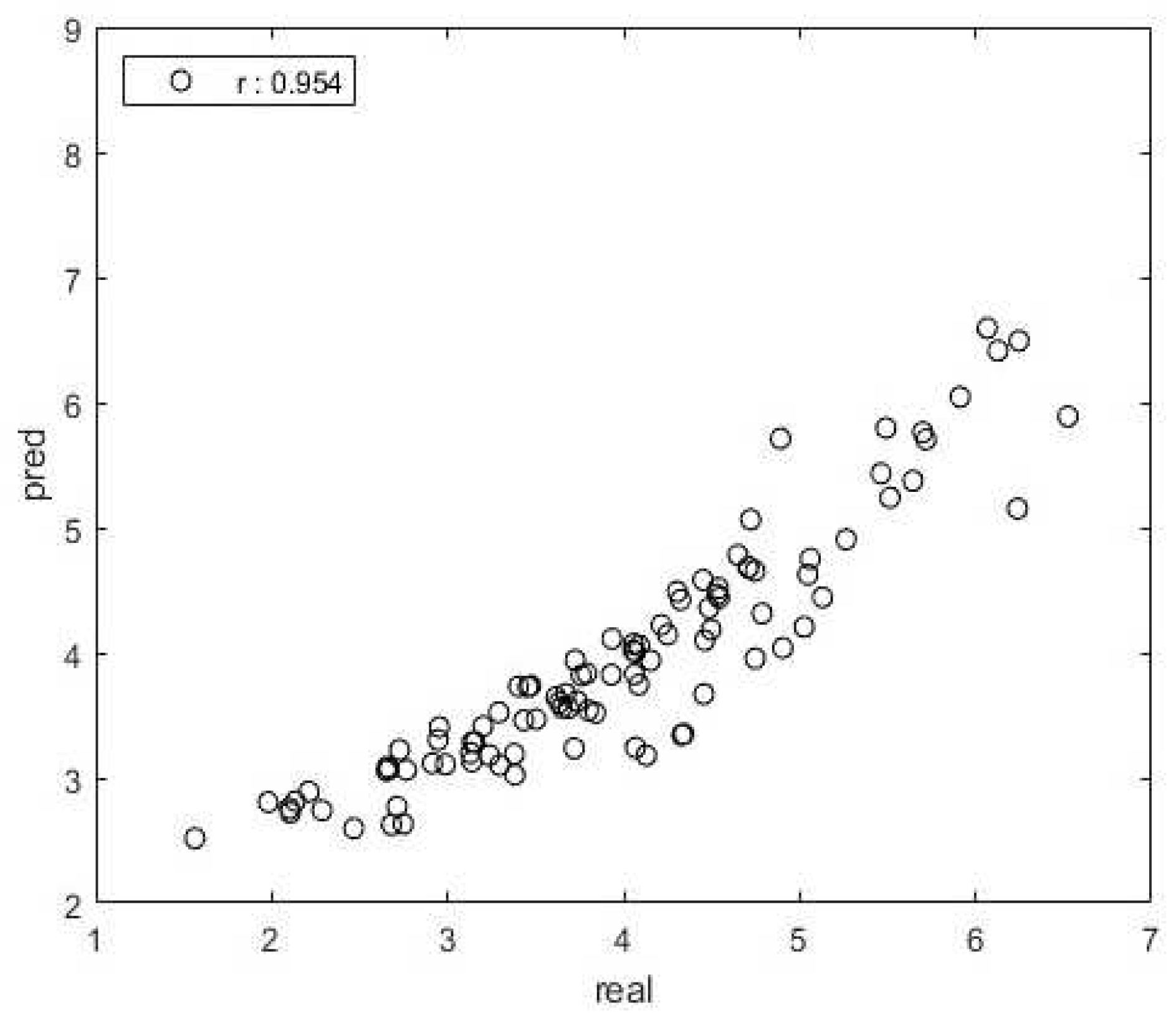
Figure 5.
Regression model for estimating Stability Index.
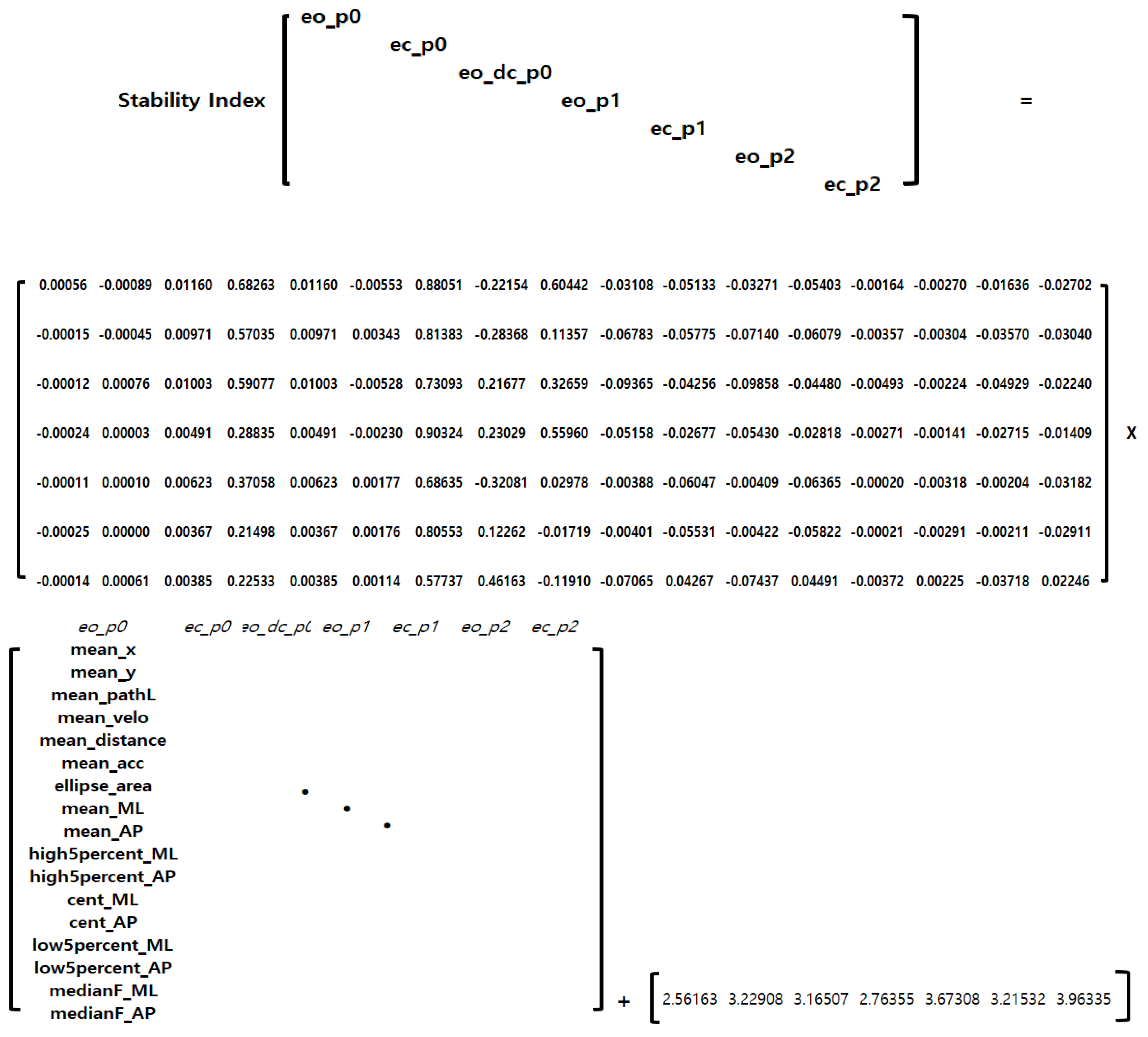
Figure 6.
Example of results GUI according to the i-CTSIB.
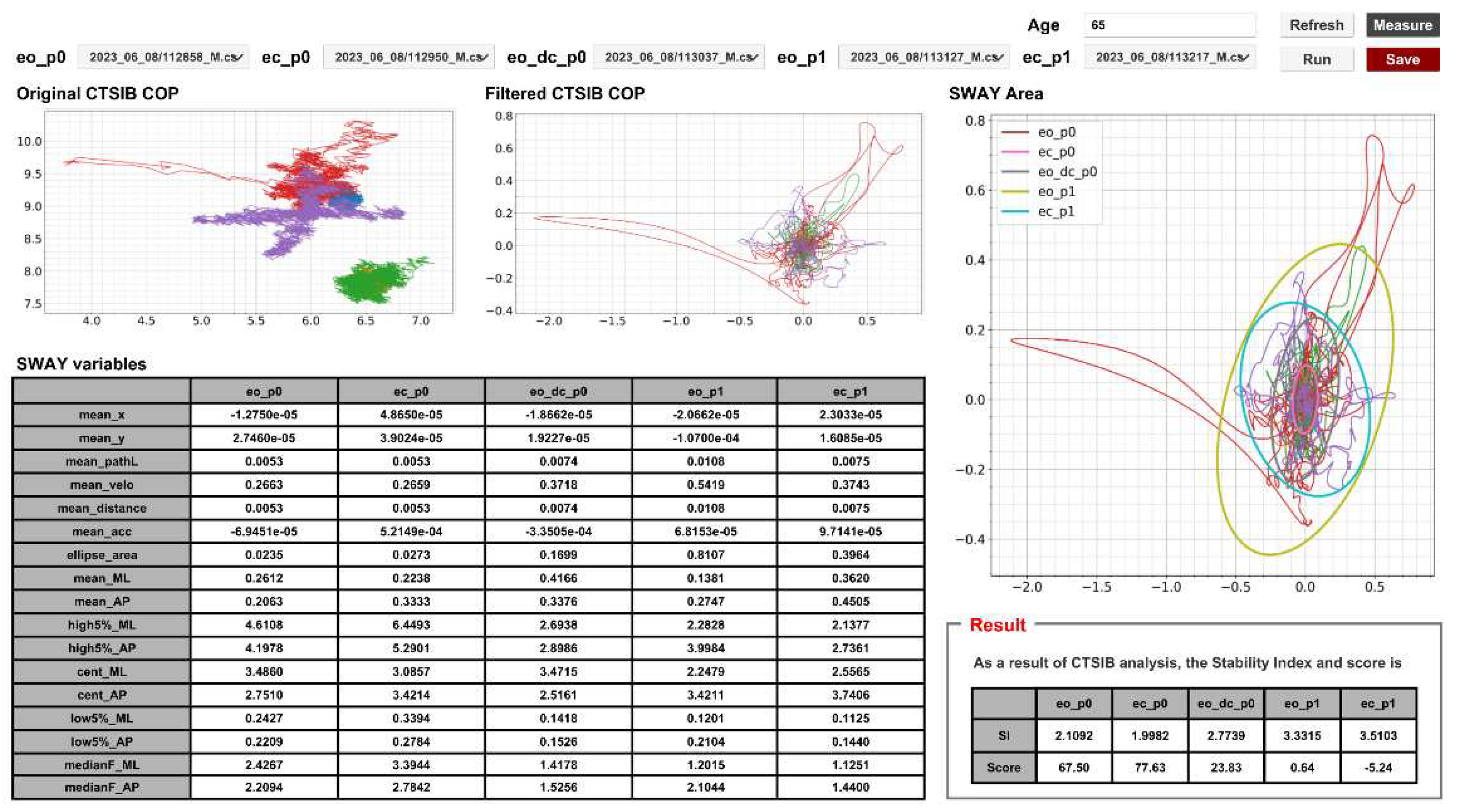

Table 1.
Description of CoP variables.
| Variables | Description |
|---|---|
| mean [cm] | mean of CoP movement |
| mean path [cm/sec] | mean of CoP distance per second |
| mean velocity [cm/s] | mean of CoP velocity per second |
| mean distance [cm] | mean of one sample distance per second |
| mean acc. [cm/s2] | mean of CoP acceleration per second |
| ellipse area [cm2] | 95 % area based on ellipse major axis |
| frequency high 5 % [Hz] | top 5 % power frequency of CoP |
| frequency center [Hz] | center frequency of CoP |
| frequency low 5 % [Hz] | bottom 5 % power frequency of CoP |
| frequency median [Hz] | median frequency of CoP |
Table 2.
Results of CoP variables during CTSIB.
| Variable | Eye-Open | Eye-Close | |||||
|---|---|---|---|---|---|---|---|
| Firm | Firm-DC | Foam-1 | Foam-2 | Firm | Foam-1 | Foam-2 | |
| mean [cm] | 0.39±0.09 | 0.38±0.09 | 0.38±0.08 | 0.39±0.09 | 0.38±0.09 | 0.38±0.07 | 0.38±0.08 |
| mean path [cm /sec] | 0.02±0.01 | 0.03±0.02 | 0.03±0.01 | 0.04±0.01 | 0.03±0.02 | 0.04±0.02 | 0.05±0.02 |
| mean velocity [cm/s] | 1.20±0.54 | 1.69±0.97 | 1.59±0.56 | 2.04±0.65 | 1.64±0.94 | 2.26±1.05 | 2.94±1.02 |
| mean distance [cm] | 0.02±0.01 | 0.03±0.02 | 0.02±0.01 | 0.04±0.01 | 0.03±0.02 | 0.04±0.02 | 0.05±0.02 |
| mean acc. x 103 [cm/s2] | -0.16±0.78 | -0.12±1.19 | -0.20±0.67 | -0.08±1.51 | -0.08±0.76 | -0.10±1.15 | -0.03±1.23 |
| ellipse area [cm2] | 1.49±1.67 | 3.27±5.73 | 2.13±1.50 | 3.58±2.24 | 1.71±1.79 | 3.16±3.00 | 6.28±4.07 |
| frequency high 5 % [Hz] | 2.73±0.76 | 2.73±0.72 | 2.73±0.63 | 2.77±0.69 | 2.82±0.66 | 2.84±0.64 | 2.78±0.62 |
| frequency center [Hz] | 2.87±0.80 | 2.87±0.76 | 2.87±0.67 | 2.92±0.73 | 2.97±0.70 | 2.99±0.67 | 2.93±0.66 |
| frequency low 5 % [Hz] | 0.14±0.04 | 0.14±0.04 | 0.14±0.03 | 0.15±0.04 | 0.14±0.03 | 0.15±0.03 | 0.15±0.03 |
| frequency median [Hz] | 1.44±0.40 | 1.44±0.38 | 1.44±0.33 | 1.46±0.37 | 1.48±0.35 | 1.49±0.34 | 1.46±0.33 |
Table 3.
The test-set R-score results of regression models during CTSIB.
| Regression model | Eye-Open | Eye-Close | |||||
|---|---|---|---|---|---|---|---|
| Firm | Firm-DC | Foam-1 | Foam-2 | Firm | Foam-1 | Foam-2 | |
| Linear | 0.954 | 0.943 | 0.956 | 0.983 | 0.945 | 0.961 | 0.970 |
| SVM | 0.898 | 0.905 | 0.905 | 0.968 | 0.891 | 0.913 | 0.938 |
| GAM | 0.865 | 0.786 | 0.789 | 0.793 | 0.805 | 0.821 | 0.862 |
| Tree | 0.954 | 0.943 | 0.956 | 0.983 | 0.945 | 0.961 | 0.970 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



