
Submitted:
12 July 2023
Posted:
12 July 2023
You are already at the latest version
Abstract
In the Formula Student Racing Car, the anti-deformation ability of the frame will affect the four-wheel positioning parameters of the racing car, and then affect the handling and stability performance of the racing car. The quality of the frame directly determines the power and economy of the racing car, so the performance of the frame is very important to the performance of the race. In order to improve the performance of the frame and reduce the total weight of the frame, the research on the lightweight design of the frame is particularly important. In this paper, based on the variable density method, the global topology optimization of the frame is carried out to obtain the distribution of the frame material, realize the efficient use of the material, and improve the torsional stiffness of the frame. Based on the adjoint variable method, the sensitivity analysis of the frame is carried out. According to the sensitivity analysis results, the size of the frame is optimized. The total mass of the frame is reduced by 12.8 %, and the performance of the maximum displacement and maximum stress is improved. The lightweight design of the frame is realized as a whole.
Keywords:
FSAC racing car frame
; topology optimization
; sensitivity analysis
; lightweight design
; variable density
; method
; the adjoint variable method
0. Preface
Formula SAE is a university level student design competition aimed at designing and manufacturing small high-performance racing car, attracting numerous college students from around the world to participate every year. So far, hundreds of schools have participated in the competition [1,2,3].
The participants focus on developing simple, lightweight, and easy to operate open chassis vehicle while ensuring compliance with SAE rules. To achieve this goal, various teams have conducted in-depth research on the design of racing frames, with the goal of improving racing performance. Currently, research on racing frame design includes the following aspects: (1) reducing racing car resistance. VAIDYA S et al. conducted aerodynamic analysis and design on SAE racing cars using fluid dynamics to reduce air resistance [4]. (2) Adopting new materials. GUIC et al. studied the application of lightweight, high stiffness, and high-strength materials such as carbon fiber and resin in racing, resulting in high power and safety performance during the race [5]. (3) Structural design of racing car frame. Yu Haiyan et al. designed a carbon fiber monocoque body with a total weight of 24.3kg, which reduces the mass by 34% compared to the truss type body. At the same time, by matching the laying direction, laying sequence, and laying quantity reasonably, the body achieves higher mechanical properties [6]. (4) Lightweight design of the frame. Hu Li et al. used finite element method to lightweight design the truss frame of a college student racing car, reducing the mass while ensuring that the strength and stiffness still meet the design requirements [7]. Kong Deying et al. used finite element analysis software to perform topology design and size optimization on the frame while meeting the constraints of vehicle vibration frequency, strength, stiffness, etc., achieving good lightweight effects [8]. In recent years, a lot of universities have done some research on frame optimization, among which the first racing car of Taiyuan University of Science and Technology has carried out local topology optimization and size optimization on the frame, improving the frame performance and reducing the frame mass [9]. However, under local optimization, only the structure of the front part is improved. There are many pipe fittings in the rear compartment and the specific direction of pipe fittings needs to be obtained, so topology optimization of the rear compartment is also particularly important; In addition, when optimizing the size of the frame, all variables were introduced and the influence weights of each variable were ignored, which would consume calculation time and the calculation accuracy would not meet the expected results.
In summary, due to the important role of optimizing the racing frame in improving the performance of racing cars, more research is currently focused on frame optimization. The optimization of the racing frame includes two aspects: structural optimization and dimensional optimization. In terms of structural optimization, the topology optimization method is usually used to find the optimal material distribution under the given structural design domain, applied load, fixed boundary and constraint conditions of the frame, so as to optimize its performance indicators. It is a very effective conceptual design method [10,11,12]. The topology optimization model with maximum stiffness [13] is adopted, so that the frame can obtain the topology with the best load transmission path, and the calculation efficiency is high.
Among them, the homogenization method is a typical topology optimization method, which decomposes the heterogeneous boundary value problem into a cell (micro) problem and a structure problem (macro), applies boundary conditions on the cell to solve its influence function control equation, and the results are accurate for one-dimensional structures, but low for two-dimensional structures [14], and in the solution module, the method is only used for homogeneous isotropic materials.
There is another topological method for continuum structures - variable density method. With the unit density in the design space as the design variable, the initial discrete value topology optimization problem is established as an optimization problem based on continuous design variables. It allows for the addition of effective materials to the structure while removing inefficient materials, resulting in the optimal structure [15]. By using the isotropic penalty microstructure model (SIMP) method, the penalty factor p is introduced to increase the cost of intermediate density elements and reduce the number of intermediate density elements, so as to make the density of elements as close as possible to 0 or 1 [16], which highlights the overall structure of the vehicle frame. More importantly, in the solving module, the variable density method has a wider applicability.
In terms of size optimization, the main issue is the large number of design variables. When optimizing dimensions, sensitivity analysis is added to select variables with larger influencing factors from numerous variables, and optimization design is carried out on these variables to improve the efficiency and effectiveness of size optimization.
Design sensitivity is the partial derivative of the design response to the optimization variable. From the perspective of calculation, the numerical methods of sensitivity analysis mainly include the following: finite difference method, direct differential method and adjoint variable method [17]. The concept of difference method is simple, but the computational complexity is high; The direct differentiation method is used for sensitivity gradient calculation, and the numerical sensitivity of the final result to any introduced parameter increment must be verified. The accuracy is high, but it is suitable for the problem of less design variables [18]. Due to the large number of vehicle frame fittings, there are many variables, and this method is not applicable; For optimization problems with fewer constraints and more design variables, the adjoint variable method considers the introduction of adjoint variables when calculating sensitivity, calculates the partial derivative of design response to design variables, improves the variables with greater sensitivity, and is more efficient for optimization design problems with more design variables.
Based on the above analysis, in order to improve the calculation accuracy, this paper conducts global optimization of the frame based on the variable density method, and retains the materials at the locations with high element density, so as to obtain the direction of the pipe fittings. In addition, the adjoint variable method is applied to perform sensitivity analysis on the frame, and the influencing factors of each variable are obtained based on the results. Based on the variables with greater influence, the size of the frame is optimized to make the design more accurate and achieve lightweight effect.
1. Frame Model Design and Structural Analysis
The frame is the "keel" of a racing car, providing positioning points for the transmission, steering, and suspension systems. Frame design is a key technology that plays an important role in automotive design. The high-performance frame of a racing car means that it requires high torsional stiffness, as it directly affects the turning performance of the car [19]. Therefore, the design of the frame must fully consider the assembly of each assembly and the lightweight of the frame itself, and ensure that the frame can be in good condition under various working conditions, ensuring that the racing car can successfully complete the race task. Taking into account factors such as design difficulty, repair difficulty, and manufacturing cost, this article selects the frame structure as a spatial truss structure, and the material selection is 4130 steel.
1.1. Determine the geometric modeling of the frame
(1) Input the coordinates of suspension hard points in CATIA V5 part design to create a suspension line diagram.
(2) Determine the specific parameters of the main ring, front ring, and front partition.
(3) Connect the bottom of the front partition, the bottom of the front ring, and the bottom of the main ring with lines in sequence.
(4) Determine the main ring slant support and the upper and lower slant support support structure of the main ring.
(5) Use the cockpit opening detection board and the cockpit internal cross-sectional detection board to check whether the front cabin and cockpit of the frame meet the requirements of the competition rules.
1.2. Establishing a finite element model
1.2.1. Finite element theory
(1) The structure is discretized, transforming the ductile continuous medium into a relatively limited number of simple basic elements, which generate a combination based on node connections, and the load is also transmitted based on this node. In the whole process of discretization, different types and numbers of elements can be selected. The types and numbers of elements have a direct impact on the accuracy and stability of the numerical value of the finite element analysis solid model.
(2) After the construction of discretization, in order to better reflect the displacement, stress and strain of the element with the node displacement, the displacement function formula can be used to describe,
In the equation:
refers to the displacement column vector of a point in the element;
refers to the shape function matrix of the element;
refers to the node displacement column vector of an element.
According to the geometric equation in elasticity, the element strain correlation indicated by the element node displacement column vector is deduced:
In the equation:
refers to the strain column vector at any point in the element;
refers to the strain matrix of the element.
Based on the principle of virtual work, the relationship between node load and node displacement of the function on the element was created, and the bending stiffness equation of the element was derived:
where the [K] refers to the stiffness matrix of the element and {R} refers to the load column vector of the overall structure.
(3) Solve as a whole, synthesize all bending stiffness equations, and obtain the equilibrium equations for all constructions, namely:
where the {δ} Refers to all constructed node displacement space column vector.
1.2.2. Establishment process
This article conducts simulation analysis and optimization design in the Hypermesh environment. Import the geometric modeling in CATIA V5, and create the finite element analysis model. The steps are as follows:
① Establish materials. The frame is made of 4130 steel, namely 30CrMo, with an elastic modulus of 2.0510 MPa, Poisson’s ratio of 0.33, density of 7.8510 g/cm3, and allowable stress of about 390 MPa.
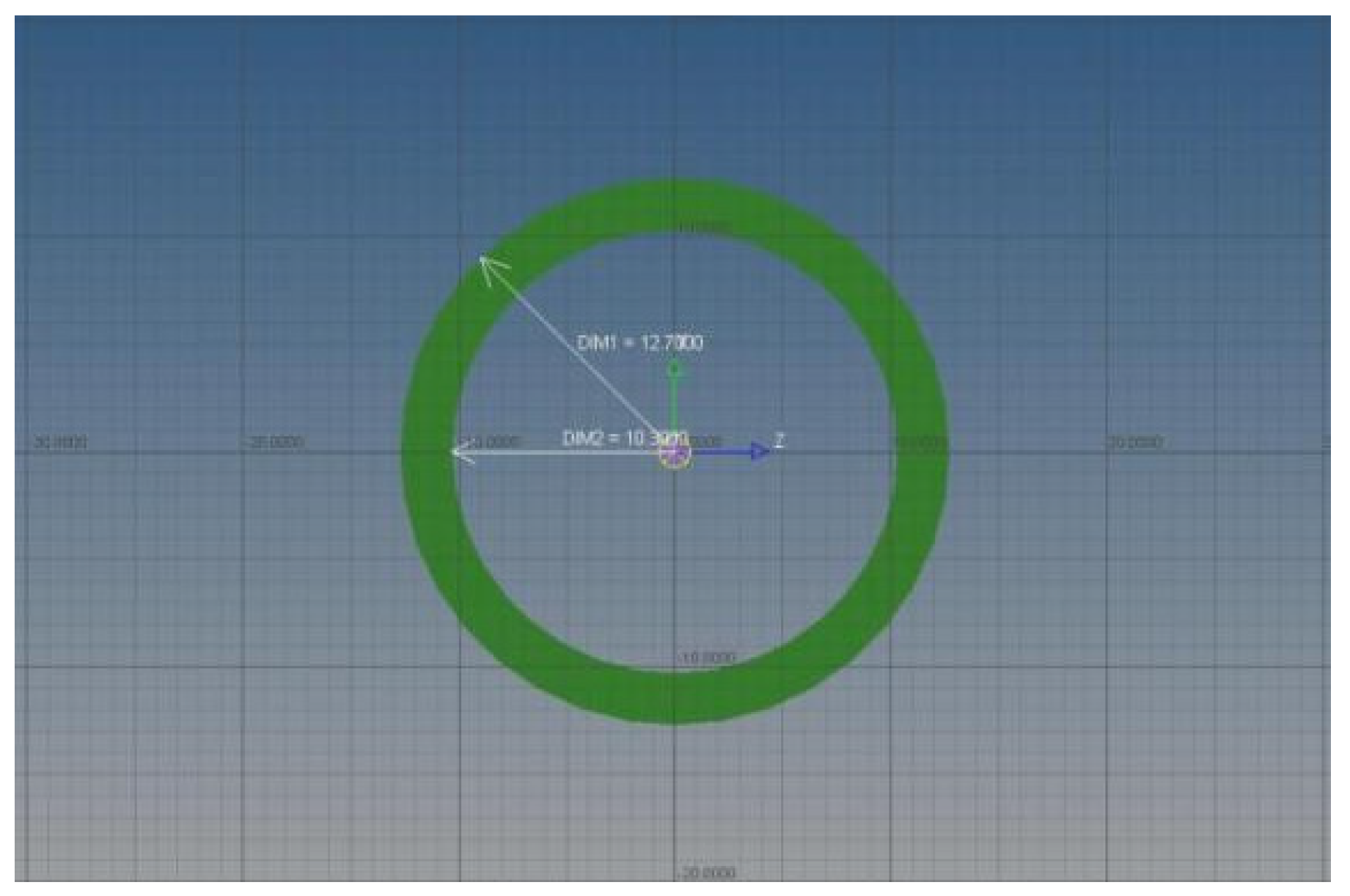
② Unit selection. Create a beam unit using Hyperbeam, as shown in Figure 1. The outer diameter of the pipes is uniformly 25.4 mm, and the outer diameter of individual pipes is 20 mm. According to the rules of the competition frame design section, four different wall thicknesses of steel pipes are established, namely 20 mm (outer diameter) * 1.2 mm (wall thickness), 25.4 mm * 2.4 mm, 25.4 mm * 1.65 mm, and 25.4 mm * 1.25 mm.
Figure 1.
Cross section of frame beam unit.
③ Establish attributes. Establish four attributes with the same name as the previously established four beam elements (for easy matching), and note that they correspond one by one with the Beam section.
④ Grid division. Divide the pipe fittings into grids and set the grid size to 10 mm for efficient calculation.
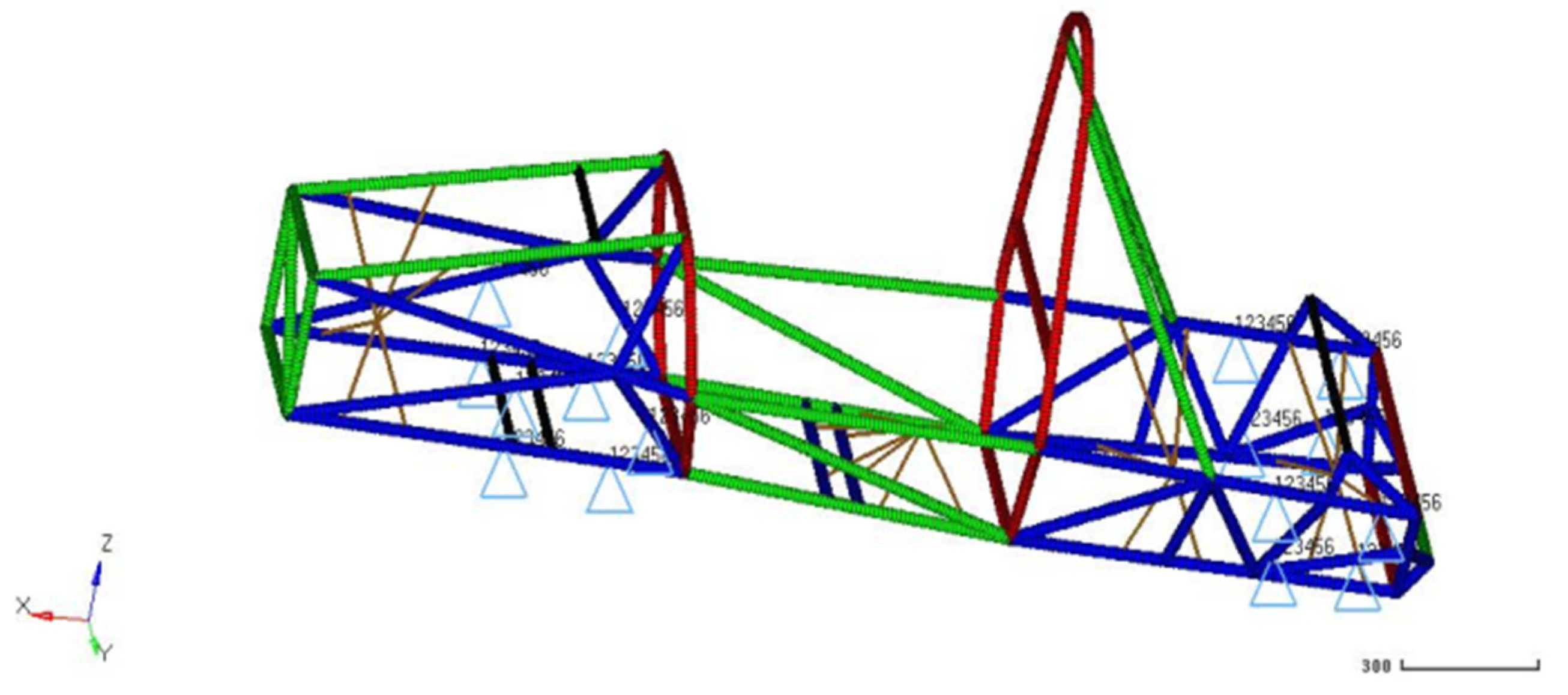
The established finite element model of the vehicle frame is shown in Figure 2.
Figure 2.
Finite Element Model of Vehicle Frame.
1.3. Working condition analysis
1.3.1. Bending conditions
The bending condition is to analyze the strength and stiffness of a racing car when all four wheels land simultaneously under full load, mainly simulating the stress distribution and deformation of a racing car driving at a uniform speed on a good road surface. Establish constraint conditions, with a frame weight of approximately 45kg, and represent the vehicle weight by applying a gravity field. Set the gravity acceleration to 9.8N/kg, and input N3 to -1, indicating that the gravity field is loaded in the negative direction of the z-axis. Due to the relatively high speed under bending conditions, the dynamic load coefficient is taken as 2.0. Constrain the left and right front suspensions dof3, and constrain the left and right rear suspensions dof1, dof2, and dof3. Among them, dof1, dof2, and dof3 represent linear degrees of freedom along the x, y, and z axes, while dof4, dof5, and dof6 represent angular degrees of freedom around the x, y, and z axes.
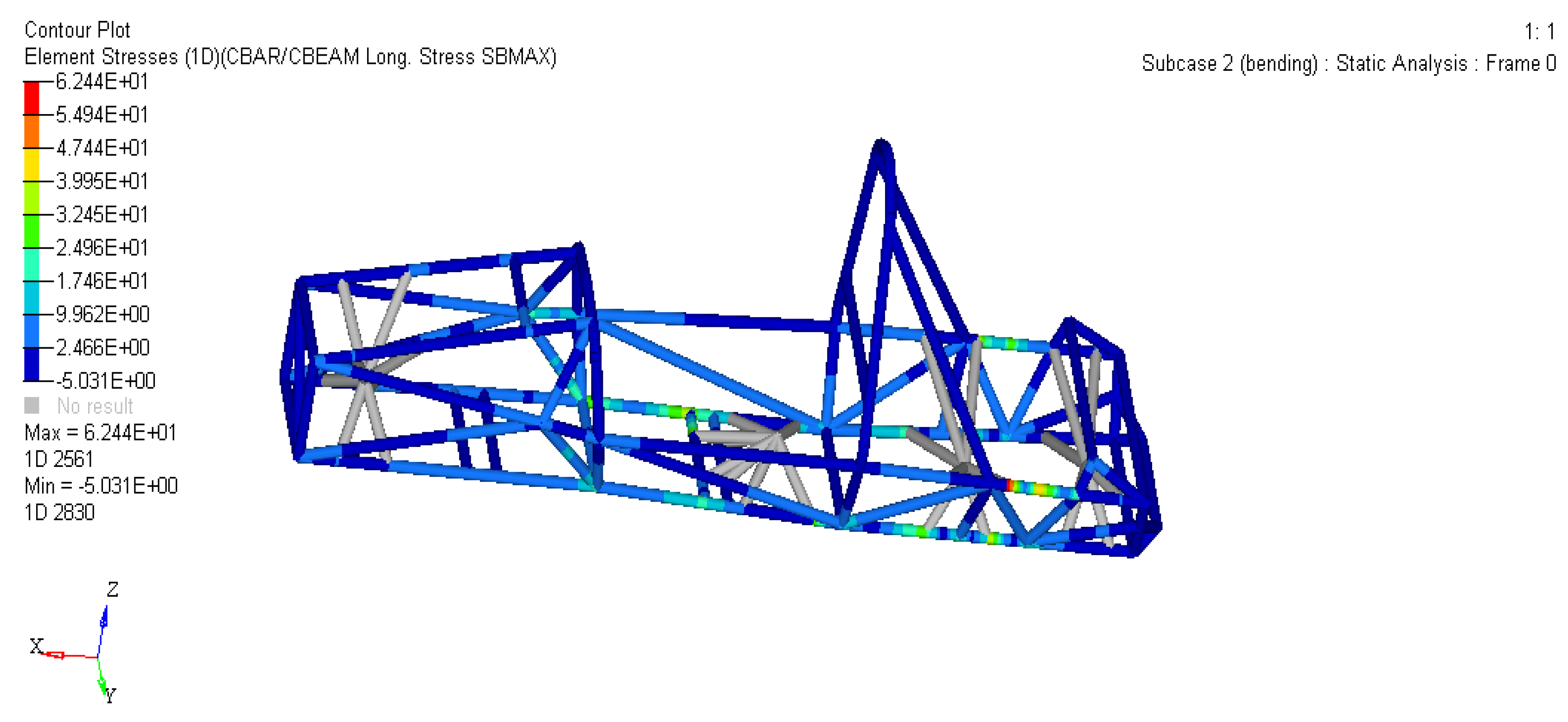
As shown in Figures 4 and 5, the maximum strain of the frame is 0.6874 mm, which appears at the connection of the front ring slant support, the front ring, and the main ring and the main ring slant support (i.e. the red area); The maximum stress of the frame is 62.44 MPa, which occurs not far from the connection point between the main ring slant support and the upper main ring slant support support rod.
Figure 4.
Displacement cloud diagram of the frame under bending conditions.
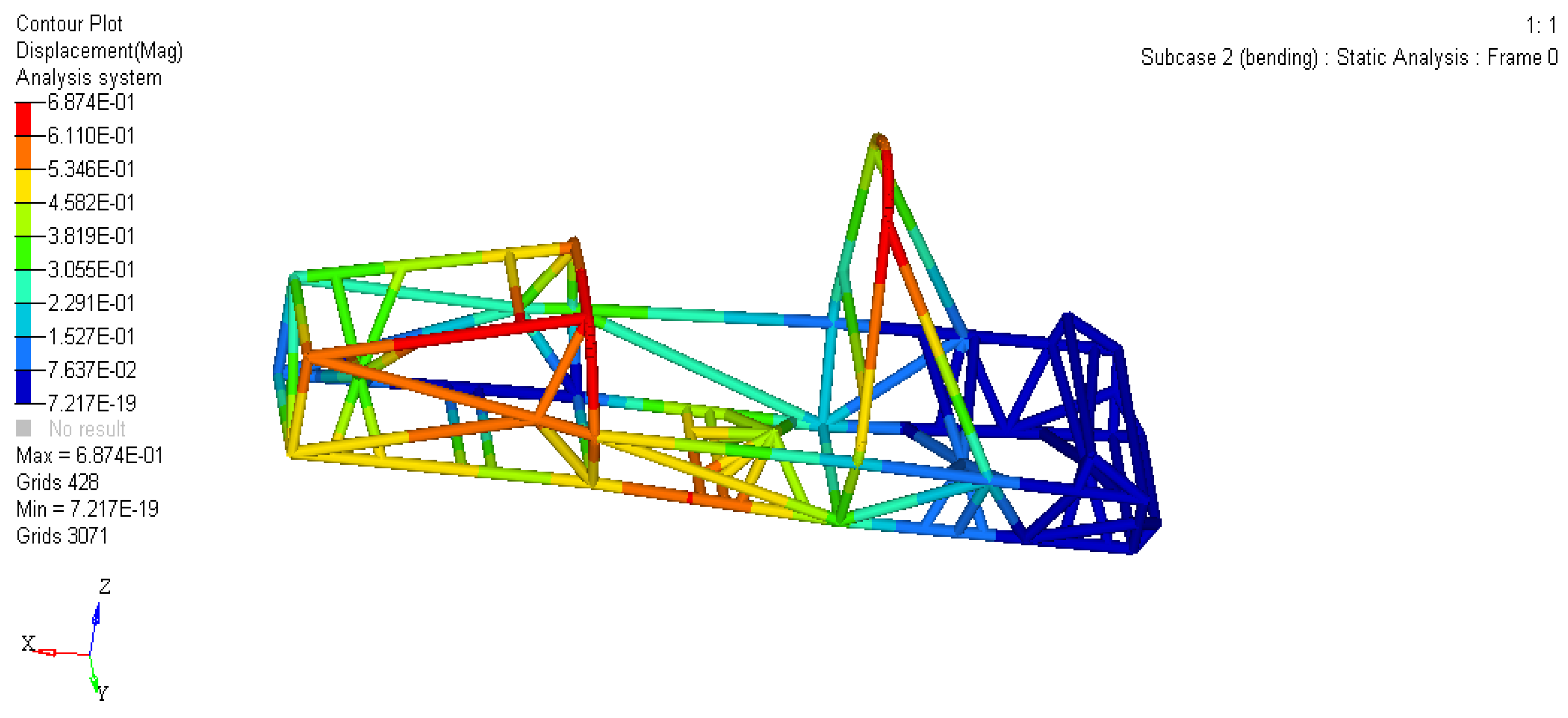
Figure 5.
Stress cloud diagram of the frame under bending conditions.
1.3.2. Emergency braking conditions
When a racing car brakes, the frame not only bears the same static load as the bending condition, but also receives the longitudinal inertia force generated by the braking force at the contact point between the tire and the ground. Here, the dynamic load coefficient is taken as 2.0, and the braking deceleration is 1.4 g. The constraint conditions are the same as those of the full load bending condition.
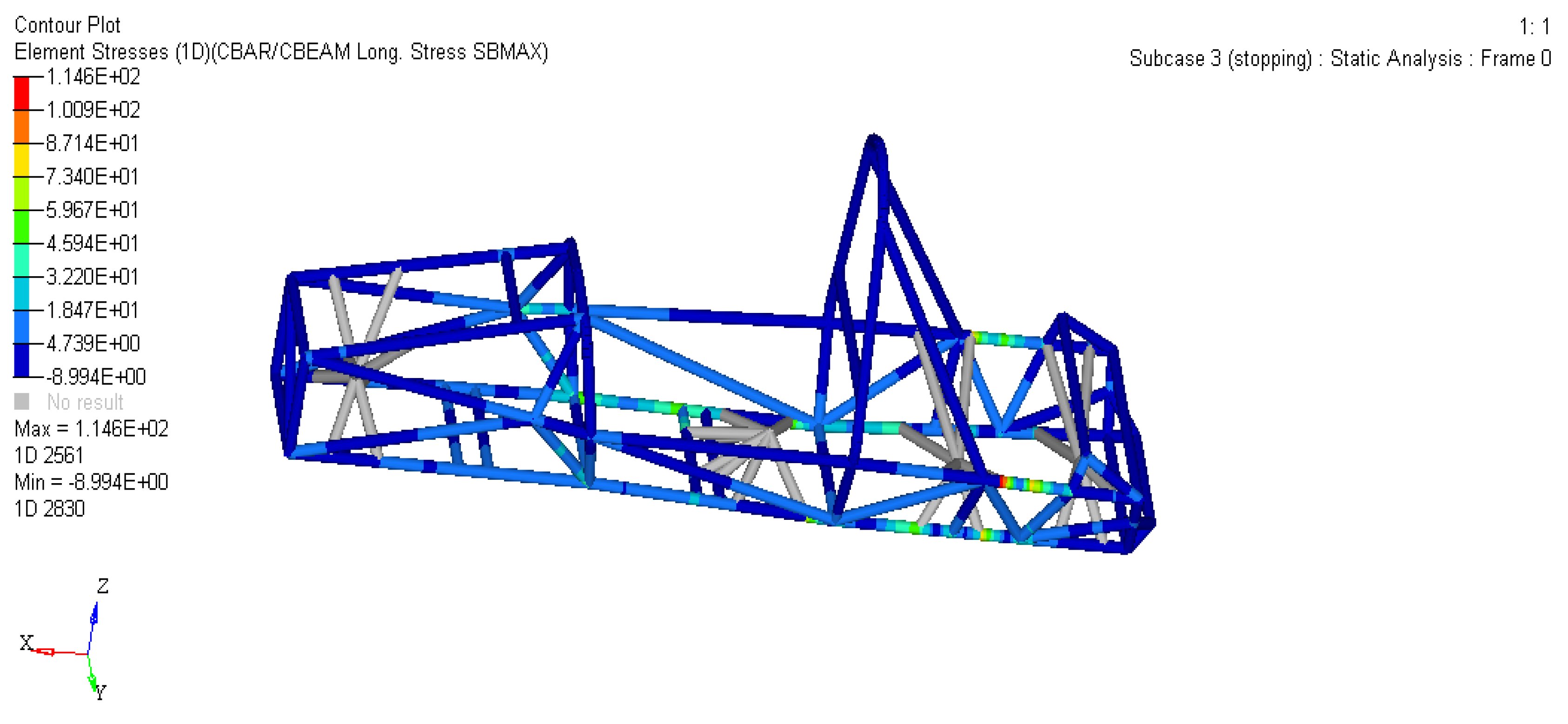
As shown in Figures 6 and 7, the maximum deviation of the frame is 1.125 mm, which occurs at the connection between the front ring and the front ring support point, as well as at the connection between the main ring and the main ring support point. The maximum pressure of the frame is 114.6 MPa, which is not far from the connection between the main ring slant support and the upper main ring slant support.
Figure 6.
Displacement Cloud Map of the Frame under Braking Conditions.
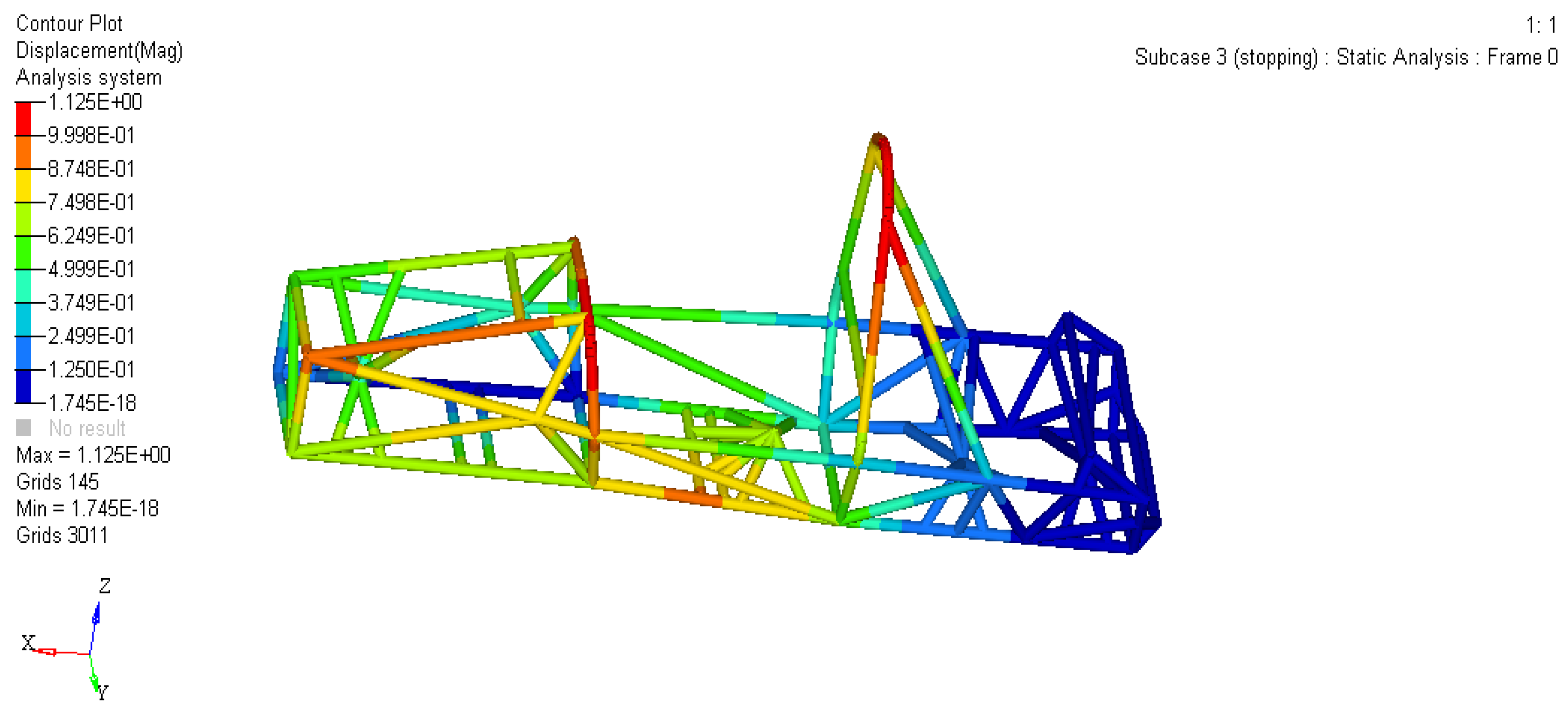
Figure 7.
Stress cloud diagram of the frame under braking conditions.
1.3.3. High speed turning conditions
When a racing car enters a corner, the frame not only bears the same static load as the bending condition, but also undergoes lateral inertia force under the action of centrifugal force. The magnitude of this inertia force depends on the vehicle speed, turning radius, and road angle, etc. This condition corresponds to an eight figure surround test. Taking a left turn as an example, the dynamic load coefficient is 1.5 and the centripetal acceleration is about 1g. Constrain the left front suspension equivalent points dof1 and dof3, constrain the right front suspension equivalent points dof2 and dof3, and constrain the left and right rear suspension equivalent points dof3.
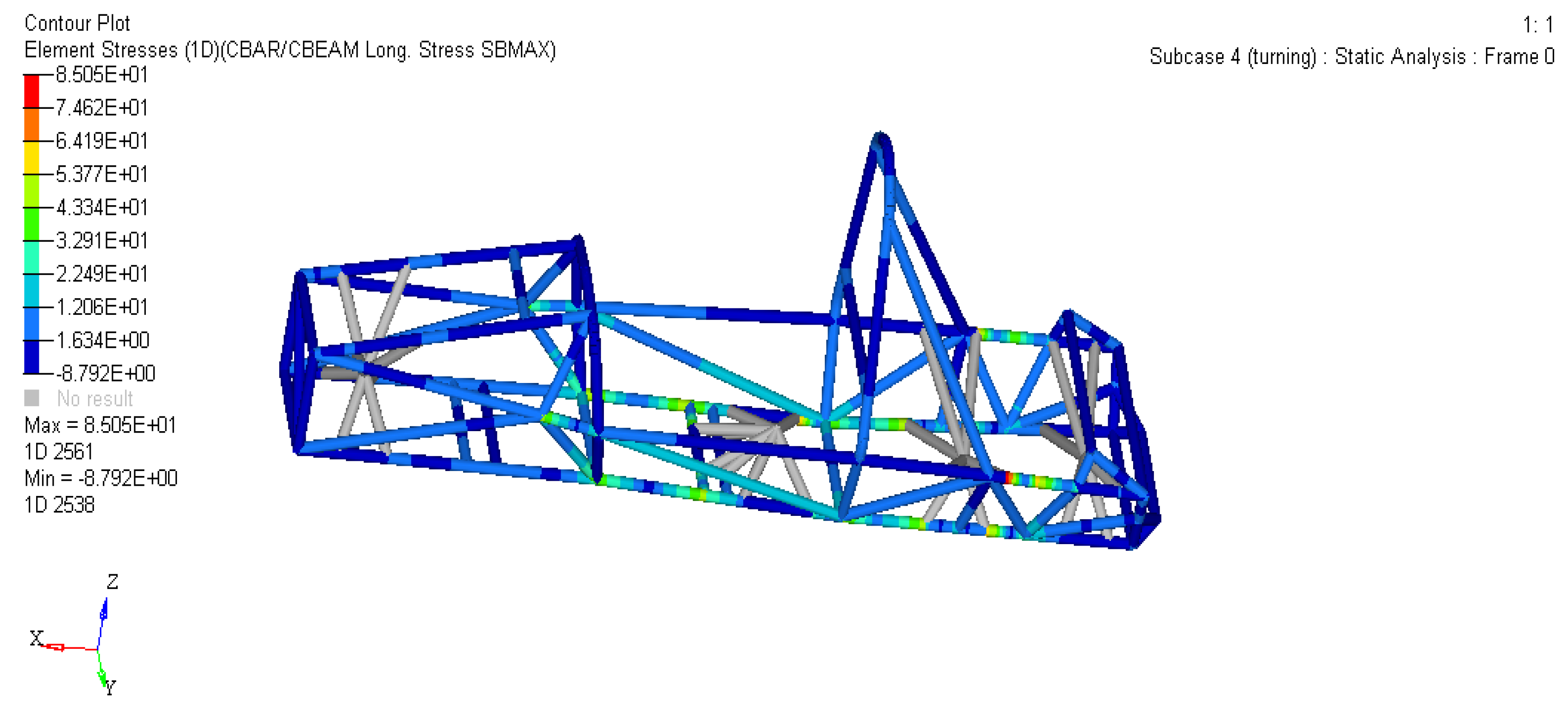
As shown in Figures 8 and 9, the maximum offset of the frame is 0.8838 mm, which occurs at or above the connection point between the main ring slant support and the main ring. The maximum pressure of the frame is 85.05 MPa, near the lower end of the main ring slant support.
Figure 8.
Displacement Cloud Map of the Frame under Turning Conditions.
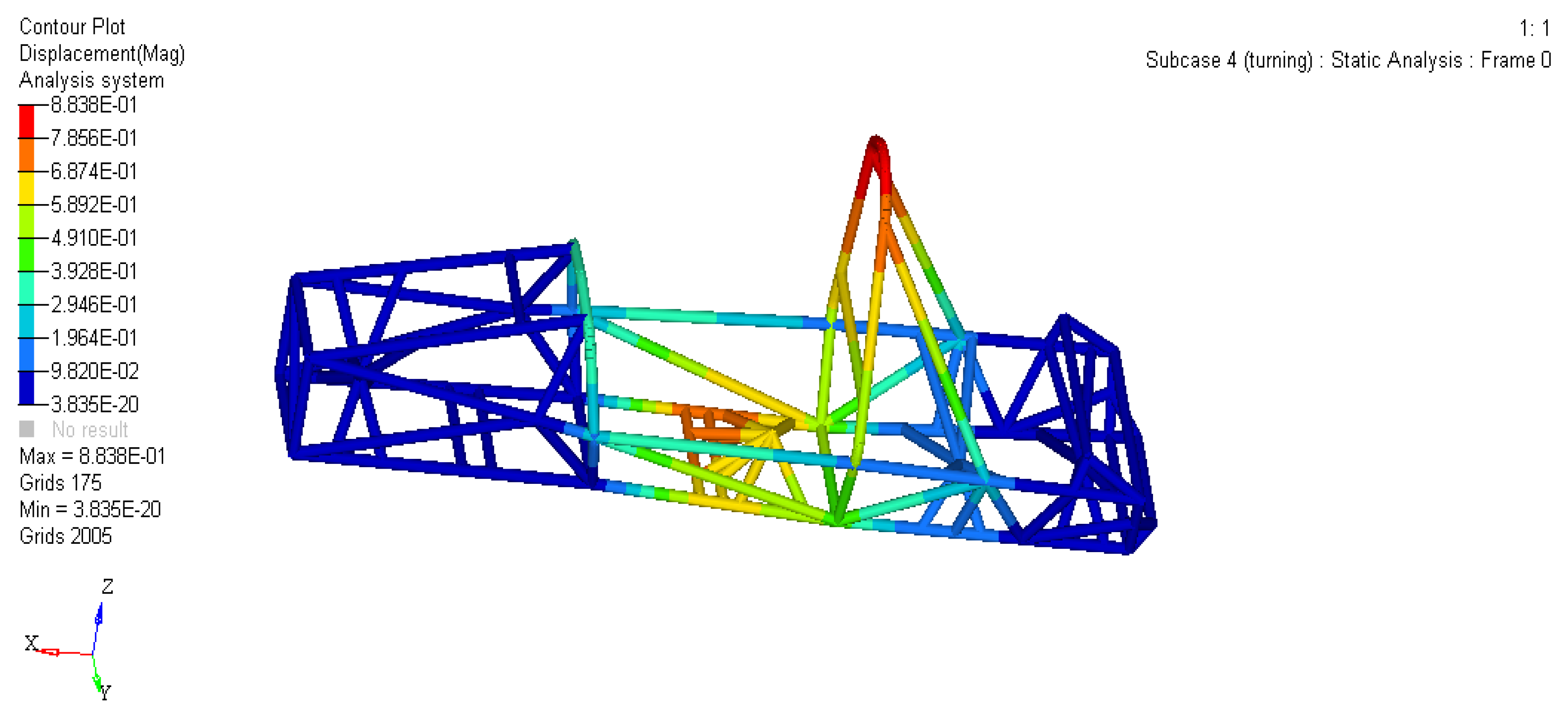
Figure 9.
Stress cloud diagram of the frame under turning conditions.
1.4. Analysis of Frame Structure Stiffness
The static stiffness of the frame mainly includes bending stiffness and torsional stiffness, which have a significant impact on the strength, vibration, noise, and fatigue characteristics of the frame. Generally speaking, the greater the stiffness of the frame, the greater its strength. For FSC racing frames, their strength is usually guaranteed by rules, but their stiffness varies greatly. Therefore, it is necessary to analyze the stiffness of the frame, especially the torsional stiffness.
1.4.1. Bending stiffness analysis
On the basis of the finite element model of the frame bending condition, remove the driver’s mass and retain the motor’s mass. At the middle of the longitudinal beams on both sides of the cockpit bottom, a concentrated force F=1000 N of equal magnitude and in the same direction (negative direction of the Z-axis) is applied, and the constraint conditions and other settings are the same as the bending condition.
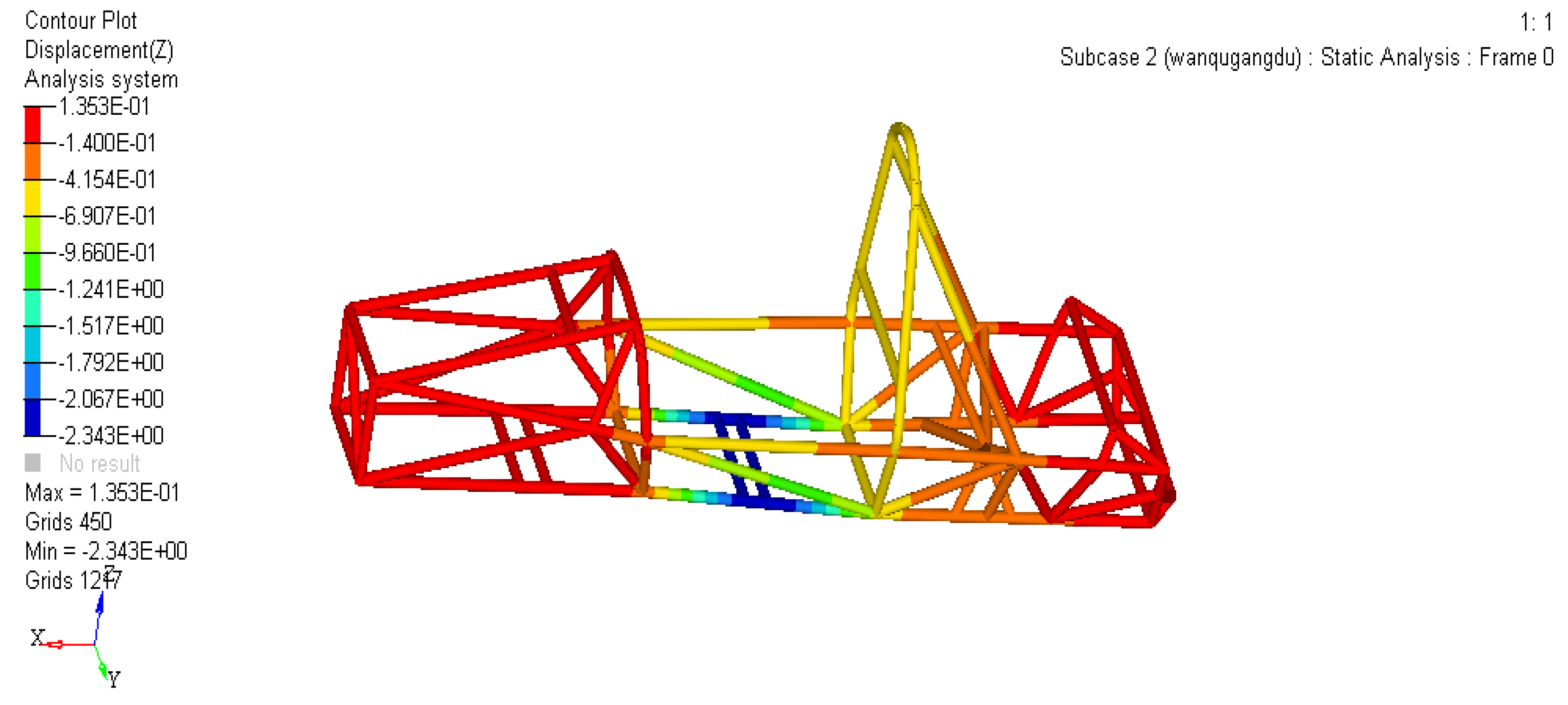
The solution result is shown in Figure 10, with a deflection value of 0.1353 mm in the vertical direction; Calculate the bending stiffness EI=F/Z=7390 N/mm according to the formula (where F represents the bending load, Z represents the larger deflection value of the frame in the vertical direction, and EI represents the bending stiffness).
Figure 10.
Displacement variables of the frame in the z-axis direction.
1.4.2. Torsional stiffness analysis
Constrain the left rear suspension dof1 and dof3, constrain the right rear suspension dof1, dof2, and dof3, and release all dofs from the left and right front suspensions. Apply a pair of equal and opposite concentrated forces F (left Z, right Z) to the equivalent points of the left and right front suspensions, where F=1000N.
The solution results in a significant deviation of 3.502 mm; Subsequently, the torsion angle between the two equivalent points of the front suspension was measured, and the result was 0.333 ° with a spacing of 490.008 mm. According to the formula K=T/ θ Calculate the torsional stiffness of the frame, with a value of 1471.5 N · m/°, where K represents the torsional stiffness, T θ After reviewing foreign design materials, it was found that the torsional stiffness range of the racing car is basically within the range of 1000-4000 Nm/° [21], indicating that the torsional stiffness design of the frame is reasonable.
1.5. Modal Analysis
1.5.1. Modal Analysis Theory
Modal analysis is the process of obtaining the modal vibration characteristics of a modal construction system, with each mode including its inherent damping coefficient, modal frequency, modal shape, and other key parameters. The process of obtaining these basic parameters is called modal analysis. Based on modal analysis, on the one hand, the degree of influence between the supported component and the supporting component can be evaluated; On the other hand, as an evaluation indicator of dynamic characteristics, its modal frequency and mode shape can serve as a reference for dynamic changes. Therefore, conducting modal analysis on the frame is particularly important [22].
1.5.2. Calculation process of frame mode
(1) Establish a finite element model of the structure
(2) Set solution methods and control parameters
(3) Create and edit a load collector, create a working load step, and set incentives at the same time
(4) Extracting Modal Results
(5) As shown in Table 1, calculate the lower order modal frequencies and modal shapes of the frame based on the calculation. Among them, the frequency before the first mode is lower than 1Hz, which belongs to six degrees of freedom rigid mode in free mode analysis. Therefore, considering extracting the first order from the mode greater than 1Hz, the lowest first order frequency obtained is about 36Hz, while the general road excitation is around 20Hz, thus avoiding the natural frequency of the frame and preventing resonance.
2. Frame optimization design
2.1. Introduction to topology optimization Method
Topology is a way to improve the spread of materials in the design space under the constraints of the set initial conditions and internal structural performance parameters. Among them, the variable density method is widely used in topology. It takes the unit density of each module in the design space as the design variable. In density based topology optimization, the continuous density field ρ: Ω → [0,1] is replaced by the constant density distribution of the element caused by the finite element discretization. Topological design is within the design domain ρ= 1. Void material ρ= 0 is described by the continuous variation of fictional unit density [23], but in reality, intermediate density units cannot exist and be manufactured. Therefore, it is necessary to avoid the generation of intermediate density units as much as possible and reduce the number of intermediate density units. In this case, it is necessary to penalize the intermediate density values that appear in the design variables. The most popular material interpolation model method currently is the SIMP method, which is represented by the formula
In the equation: - Elastic modulus after interpolation
—elastic modulus of material in the solid part
—elastic modulus of the material in the porous part
—unit relative density, with a value of 1 indicating the presence of material and 0 indicating the absence of material or holes
p—penalty factor
The higher the unit density, the more critical the material at this location must be retained as it is responsible for bearing the load. Reduce the use of materials with low unit density, achieving lightweight design and rational utilization of materials.
The mathematical model of topology optimization can be expressed as [22]:
Minimize:
Constraints:
In the function, X represents the design variable; (X) represents the objective function; represents inequality constraint functions; represents the equality constraint function; L represents the upper limit of constraint; U represents the lower limit of the constraint.
2.2. Topology optimization of frame
2.2.1. Topology optimization Settings
(1) Design variable: Unit density of the frame space.
(2) Establish responses: Create responses such as weighted comp and mass, respectively.
(3) Constraint condition: The mass of the frame design space is limited to 0.3~0.5, which means that the solved material mass accounts for 30%~50% of the original mass (placement penalty factor).
(4) Establish objective function: The optimization objective is flexibility, which is equivalent to the displacement formed by a unit force at that point in data, while stiffness is equivalent to the force required to cause a unit displacement at that point in data. Therefore, the objective function sets the minimum flexibility as the maximum stiffness.
(5) Minimum and maximum member sizes: The minimum size needs to be greater than three times the size of the grid unit, and the maximum member size needs to be greater than two times the minimum member size. The measured unit distance is 13.15 mm, so the minimum size mindim is set to 50 mm and the maximum size maxdim is set to 100 mm.
(6) Symmetric constraint: The frame structure is symmetrical about the longitudinal plane. Since only the degrees of freedom of the left front suspension are fixed in the load step, in order to simultaneously consider the right front suspension, a symmetric constraint about the xoz plane is applied in the design variables.
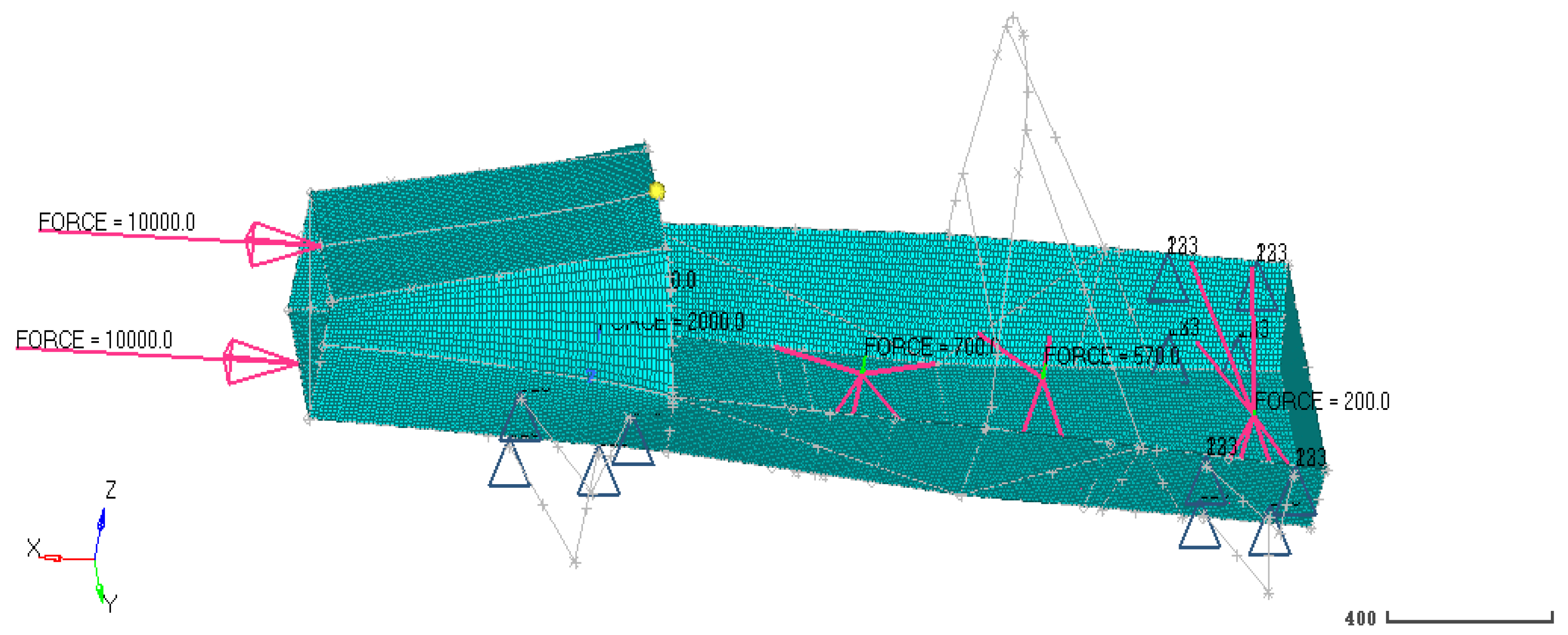
Based on the above settings, establish a topology model as shown in Figure 11.
Figure 11.
Topological model of the frame.
2.2.2. Topology optimization results
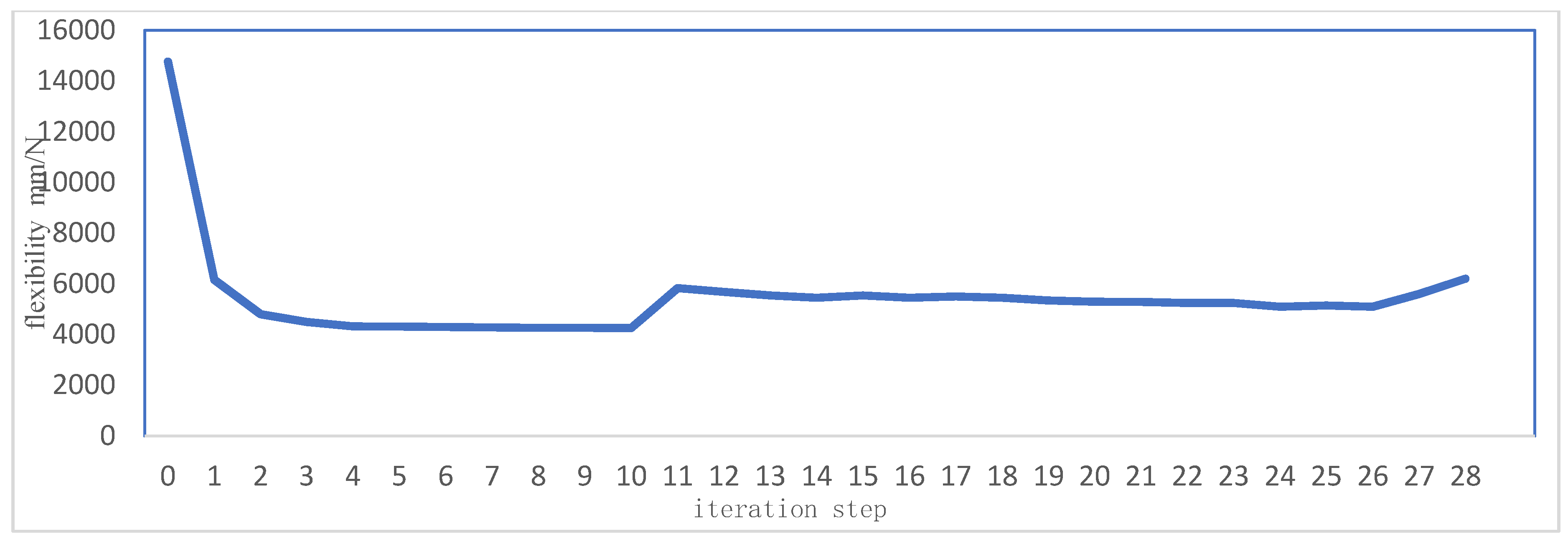
After 33 iterations, the calculation was completed, and the iteration frequency curve is shown in Figure 12. With the increase of iteration frequency, the flexibility maintained a decreasing trend, with the lowest point of flexibility being 4760 and 5100 in the 10th and 26th iterations, respectively.
Figure 12.
Function image of flexibility change.
Pay attention to the iterative results of these two steps, and obtain the material interpolation model based on SIMP method as shown in Figures 13 and 14 by punishing the intermediate density, which is the obtained topological result. The bright red area represents a unit density of 1, the dark blue area represents a unit density of 0, and the other tones represent intermediate densities.
Figure 13.
The pattern after iterative optimization solution in step 10.
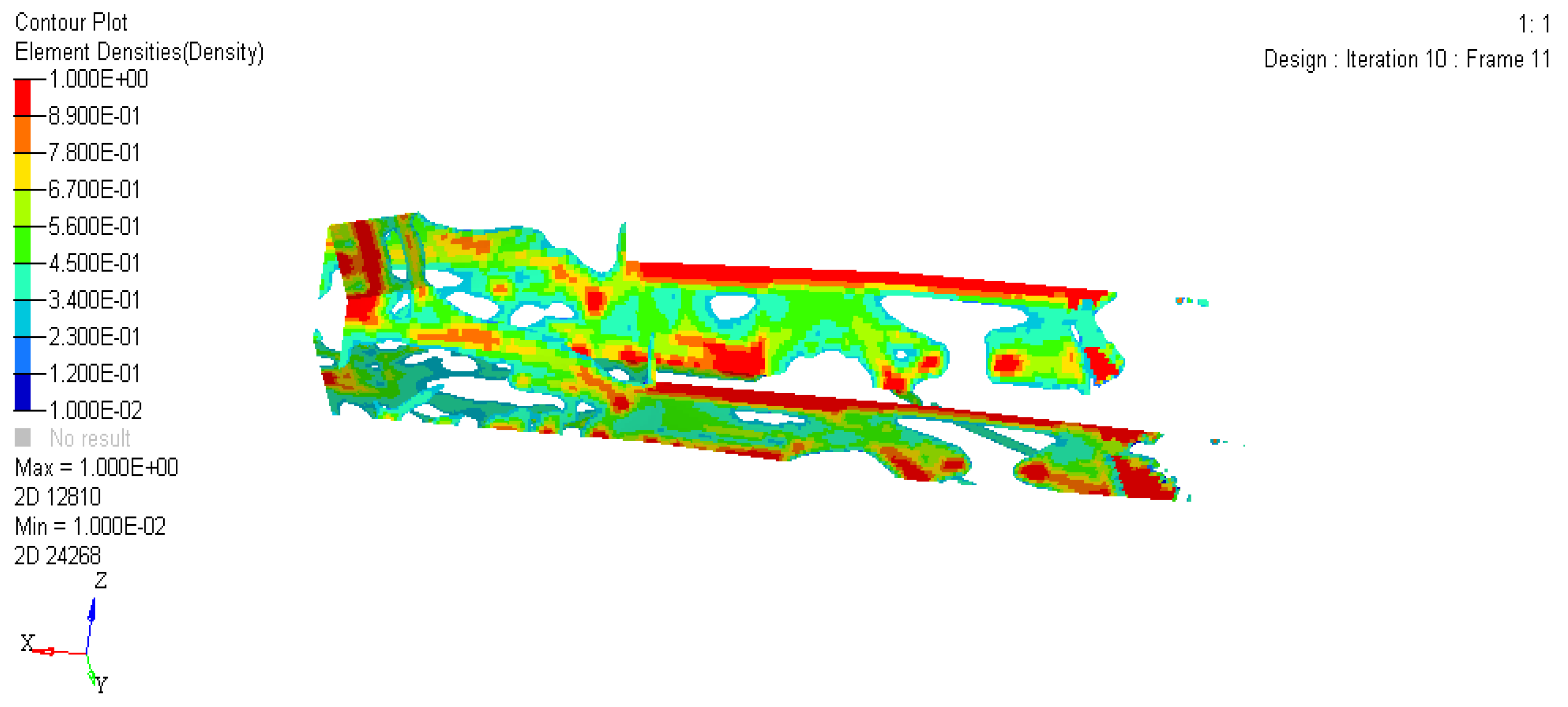
Figure 14.
Pattern after iterative optimization solution in step 26.
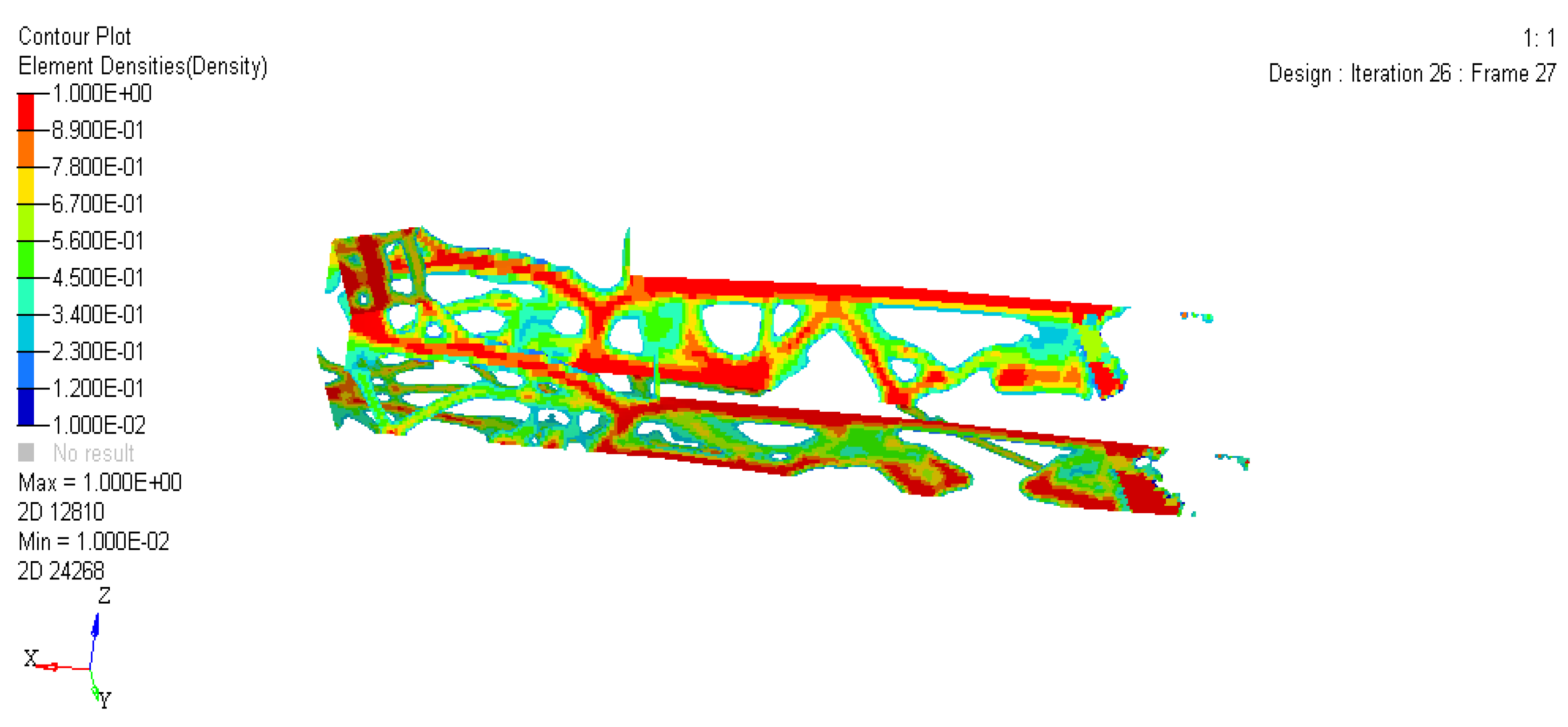
These two solved patterns represent the distribution of frame materials. The area with a unit density of 1 is the main component of the frame, responsible for transmitting loads, and the middle density area is the other components of the frame. Through comprehensive analysis of Figures 12–14, although the flexibility of iterative operation in step 10 is smaller than that in step 26, the difference is not significant. Considering the distribution effect of materials, the effect of step 26 is the best and the material distribution is obvious, so the flexibility difference is ignored, and the iterative result in step 26 is selected as the final result of topology optimization.
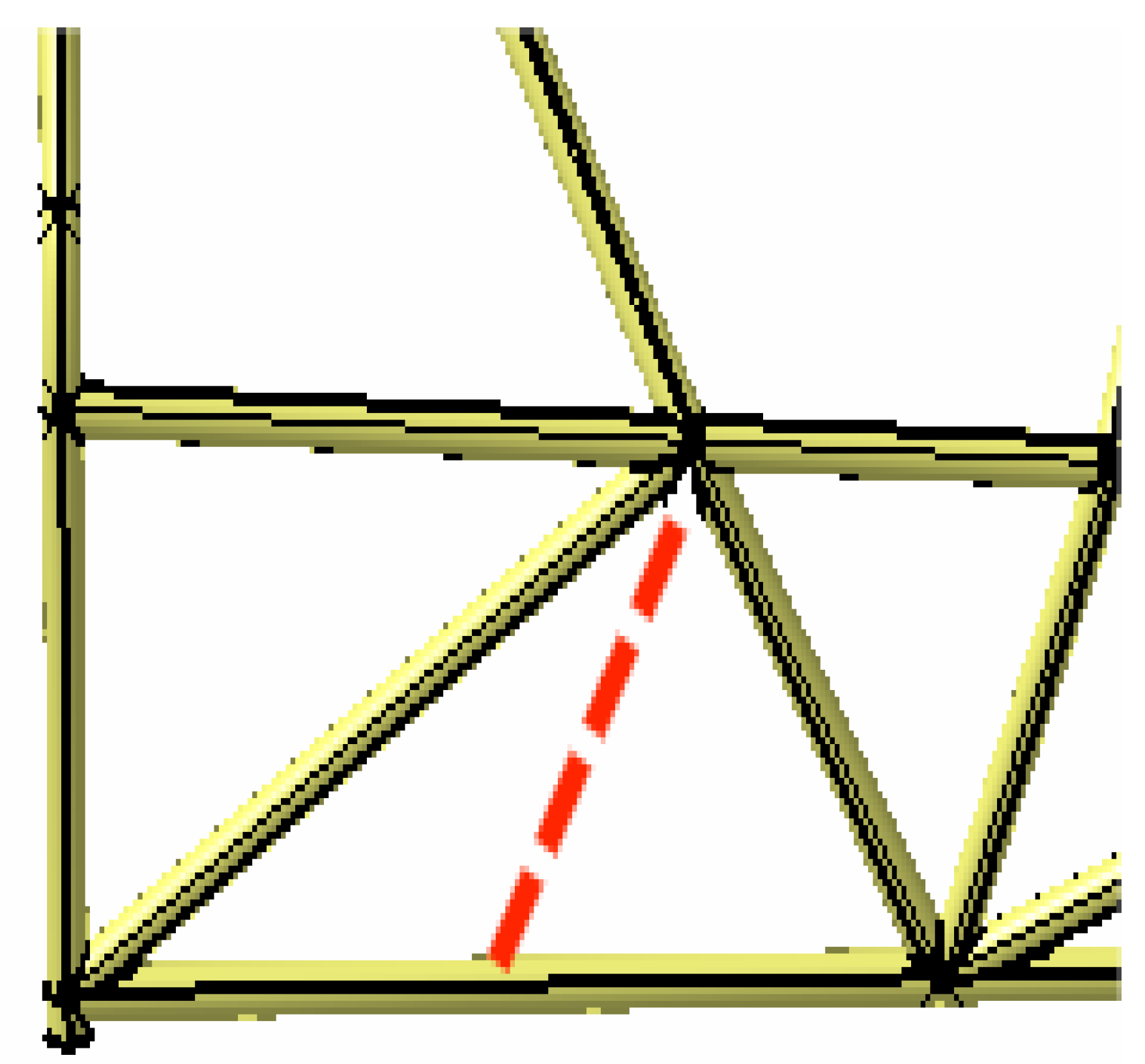
Finally, some pipe fittings are adjusted according to the results of topology optimization. As shown in Figure 15, a pipe fitting (represented by a solid line) is added to the front compartment. For the frame structure in this paper, the main body is made of thin-walled circular steel tubes. If the design is directly based on the results of topology optimization, there will be many actual process problems and the competition rules will not be met. Therefore, it is necessary to perform manufacturability treatment on the result, that is, combine it with actual processing technology and modify it based on engineering experience to ensure that the optimized frame can be manufactured smoothly and meet the competition rules. As shown in Figure 16, it indicates that a pipe fitting has been added to the front partition support structure. As shown in Figure 17, it indicates that a pipe fitting has been removed from the rear compartment (represented by a dashed line).
Figure 15.
Front compartment model after topology optimization.
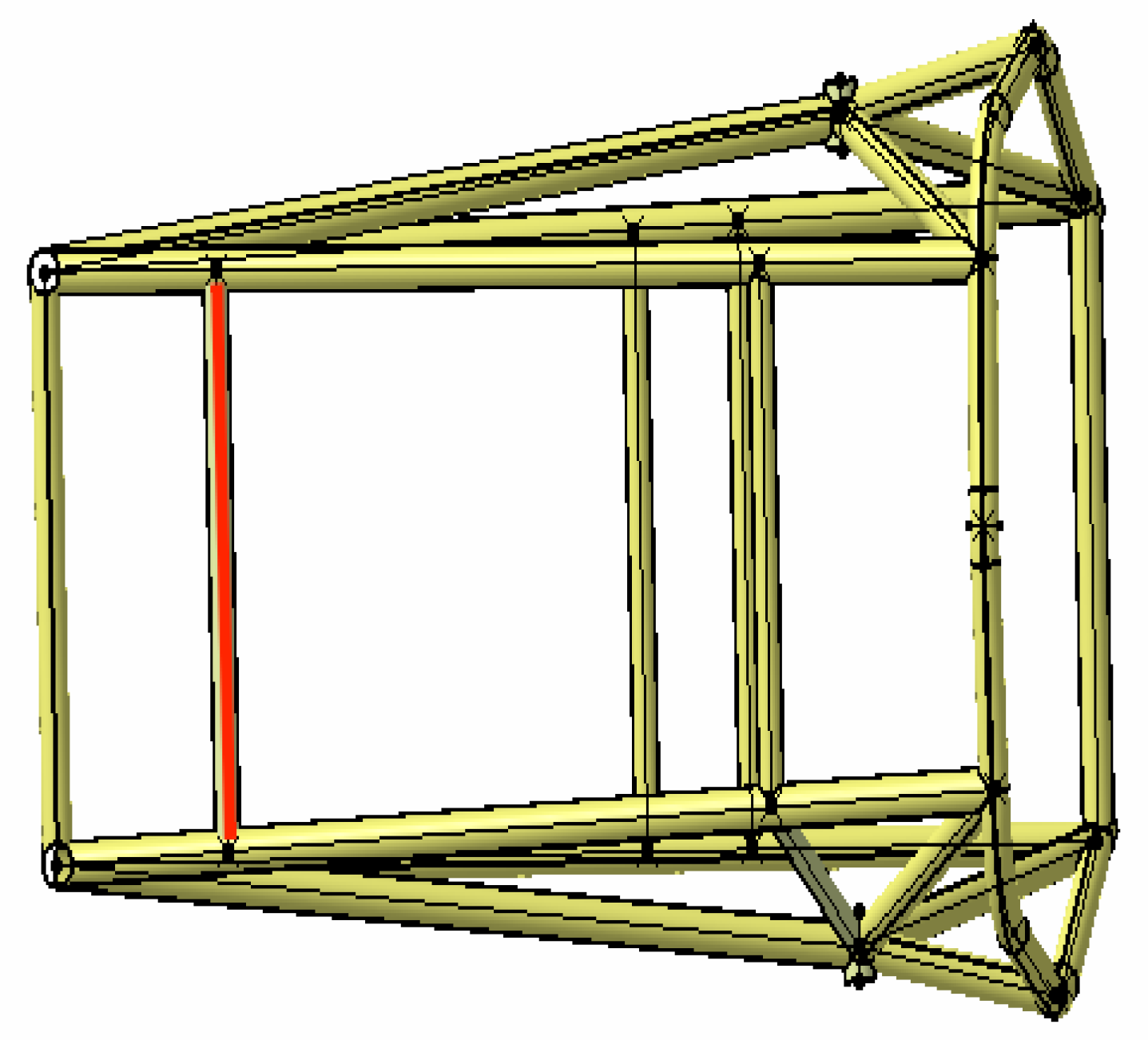
Figure 16.
Front diaphragm support structure after topology optimization.
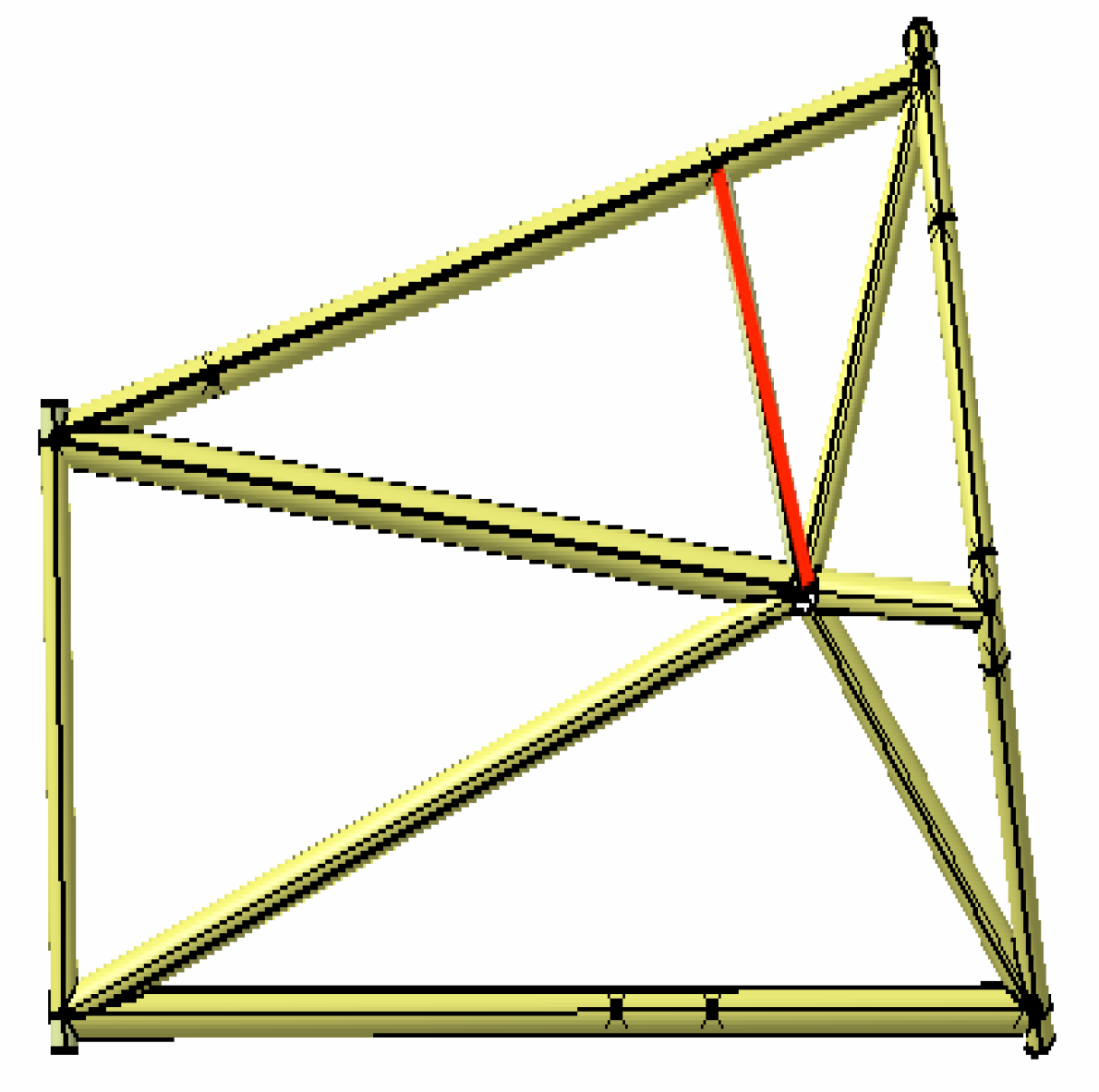
Figure 17.
Rear compartment model of frame after topology optimization.
2.3. Size optimization
2.3.1. Sensitivity analysis
The sensitivity of changes in technical parameters of the frame to design variables is the sensitivity analysis of the frame, which is based on optimization design. Based on sensitivity analysis, the level of influence of design variables on design response can be obtained, thereby clarifying improvement plans. The partial derivative of the design response with respect to the design variable is called sensitivity. The sensitivity of the optimization objective function to the design variable represents the degree of change in the objective function when the design variable changes, and the weight of the variable is obtained through the sensitivity. Design sensitivity is the partial derivative of design response to optimization variables. For optimization problems with fewer constraints and many design variables, such as topology optimization and topography optimization, the introduction of adjoint variables can be considered when calculating sensitivity. The adjoint variable method can process multiple variables at the same time. When there are more design variables than responses, the adjoint variable method is more efficient than other methods, This feature is very suitable for analyzing sensitivity problems of large structures [24].
There is a relationship between the structural performance parameter g and displacement as follows:
where u represents the vector of the element displacement node.
The sensitivity of the structural response to the structural design variable X is expressed as [25]:
Motion balance equation:
where K represents the stiffness matrix, represents the load space vector of a unit node. For optimization problems with multiple design variables and fewer design tube bundles, the adjoint variable method is generally used for sensitivity analysis. Introduce variable a such that
From equations (10) to (12), it can be concluded that:
2.3.2. Optimization of frame size
The purpose of size optimization is to reduce the wall thickness of less stressed pipe fittings, thereby achieving lightweight design (some pipe fittings are determined according to rules) and improving the power performance of racing cars.
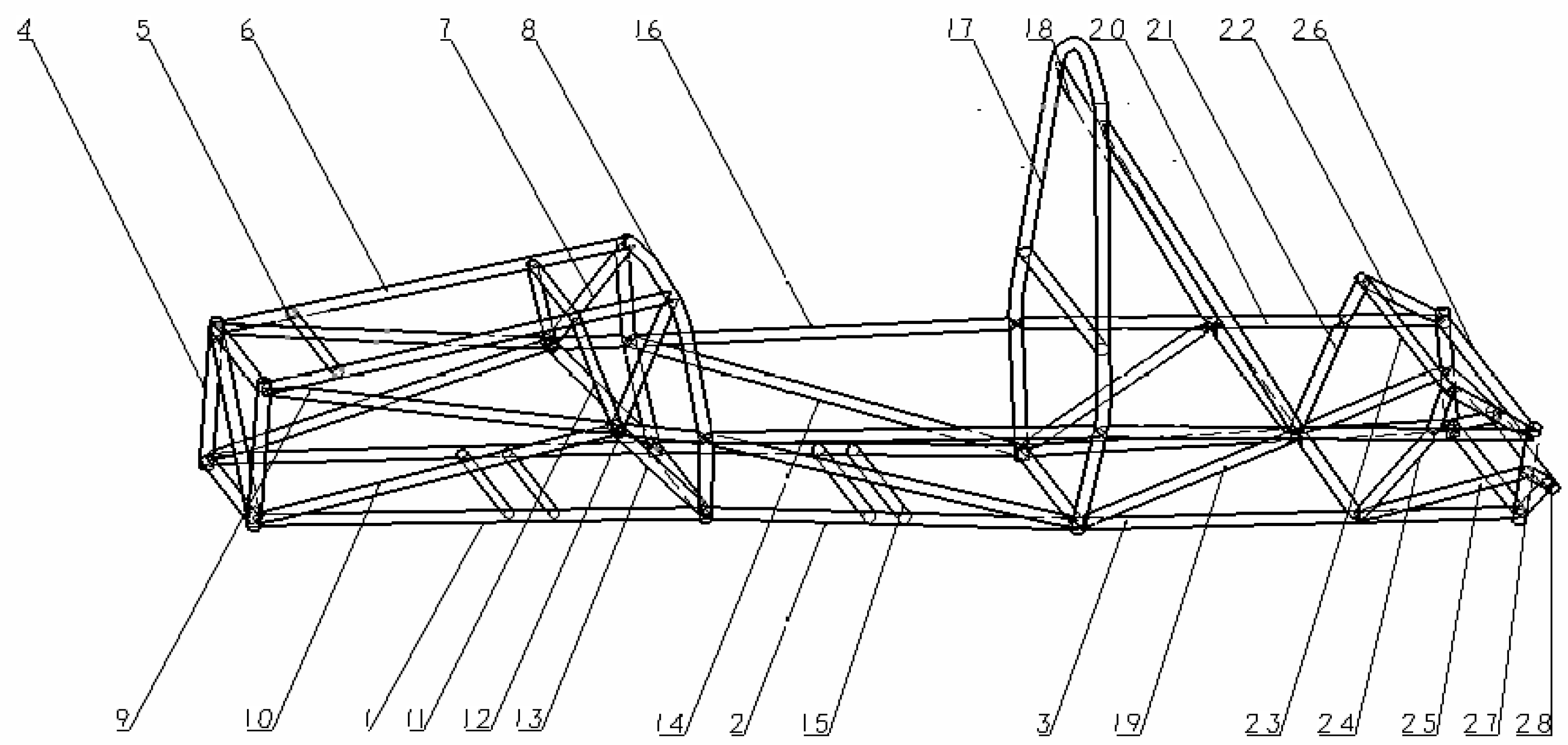
(1) Design variables: Use the inner and outer diameters of each pipe fitting on the frame as design variables. Due to the fact that the frame is a symmetrical structure about the longitudinal plane, setting two symmetrical pipe fittings as a variable effectively improves computational efficiency. According to specific needs, the range of values for each variable should be clarified. The initial value of the inner circle radius for this racing frame is 10.3 mm, with a variation range of 1-14 mm. The initial value of the outer circle radius is 12.7 mm, with a variation range of 1-3 mm (as shown in Figure 16)
Figure 16.
Definition of Design Variables for Size Optimization.
(2) Establish responses: In the responses panel, establish three responses: mass, stress, and displacement.
(3) Constraints: ① Due to the fact that the maximum stress of the frame under three typical working conditions is 114.6 MPa, which is lower than the allowable stress and has a large optimization space, the maximum stress is set to not exceed 200 MPa.
② Respectively constrain the displacement to not exceed the original value under various working conditions, for example, the displacement does not exceed 0.3792 mm under bending conditions.
(4) Set objective function: With the overall goal of minimizing the net weight of the vehicle frame, use the accuracy and output card provided in HyperMesh to define the accompanying variables and output sensitivity analysis results.
2.3.3. Analysis of optimization results
Considering that the residual stress under each working condition is relatively large, size optimization mainly focuses on the direction of strain. After post-processing the visualization file in HyperGraph, the sensitivity analysis results are shown in Figure 17. Except for the first five pipe fittings, the sensitivity of other pipe fittings is very low and can be ignored. The sensitivity is positive, indicating that the calculated variables and factors change in a positive direction; When the sensitivity is negative, it indicates that the calculated variable changes in the opposite direction to the factor.
Figure 17.
Quality Sensitivity.
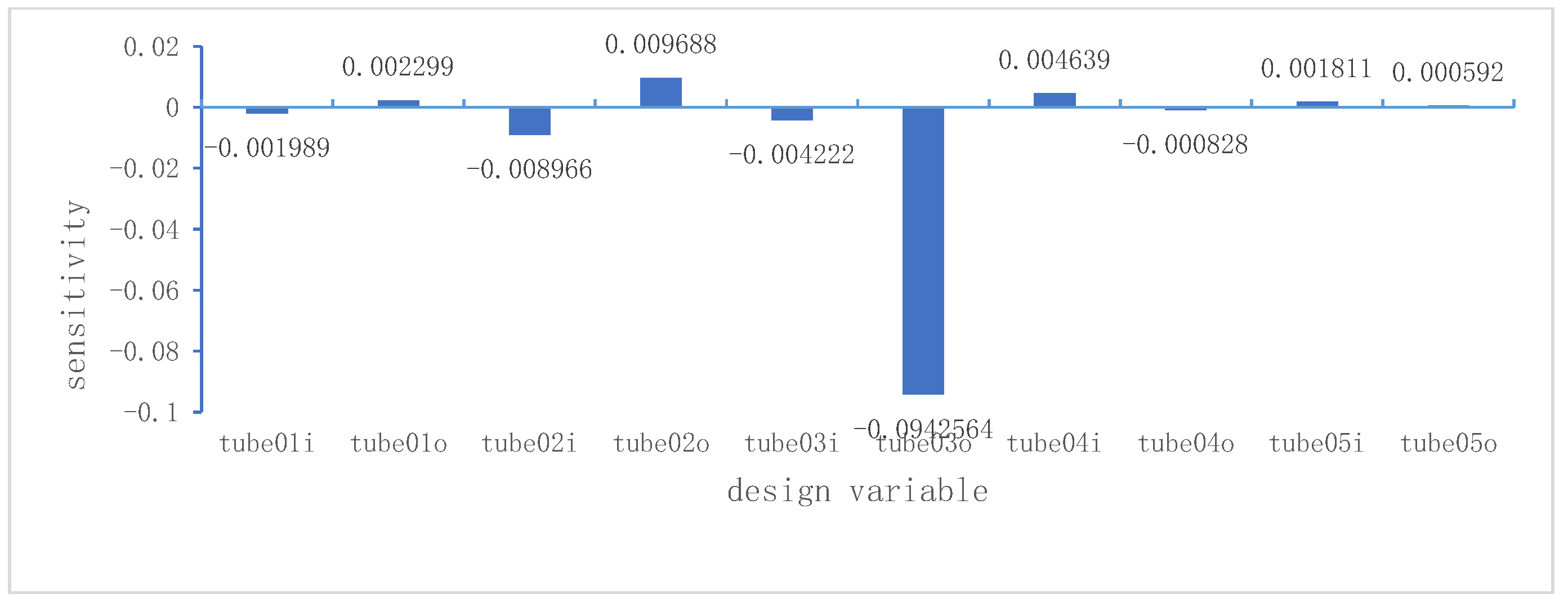
On the premise of meeting the strength requirements, the second pipe fitting has the greatest impact on the overall quality of the vehicle; However, due to the basic determination of the hard point position of the suspension, it is considered to adjust the side collision avoidance structure.
Analysis of Figures 18–20 shows that the maximum strain values under bending, braking, and turning conditions mostly occur near the bottom of the cabin. Overall, the influence of No. 2 and No. 3 pipe fittings is relatively significant. Therefore, adjusting the cabin structure can effectively reduce the deformation of the pipe fittings. The next focus of design is to reduce the wall thickness of the pipe fittings in this area. After optimization, it is necessary to modify the inner and outer diameter dimensions, Ensure that the outer diameter does not exceed the 25.4 mm specified in the competition and meets the actual steel specification standards. The solved data will be organized as shown in Table 2.
Figure 18.
Strain sensitivity under bending conditions.
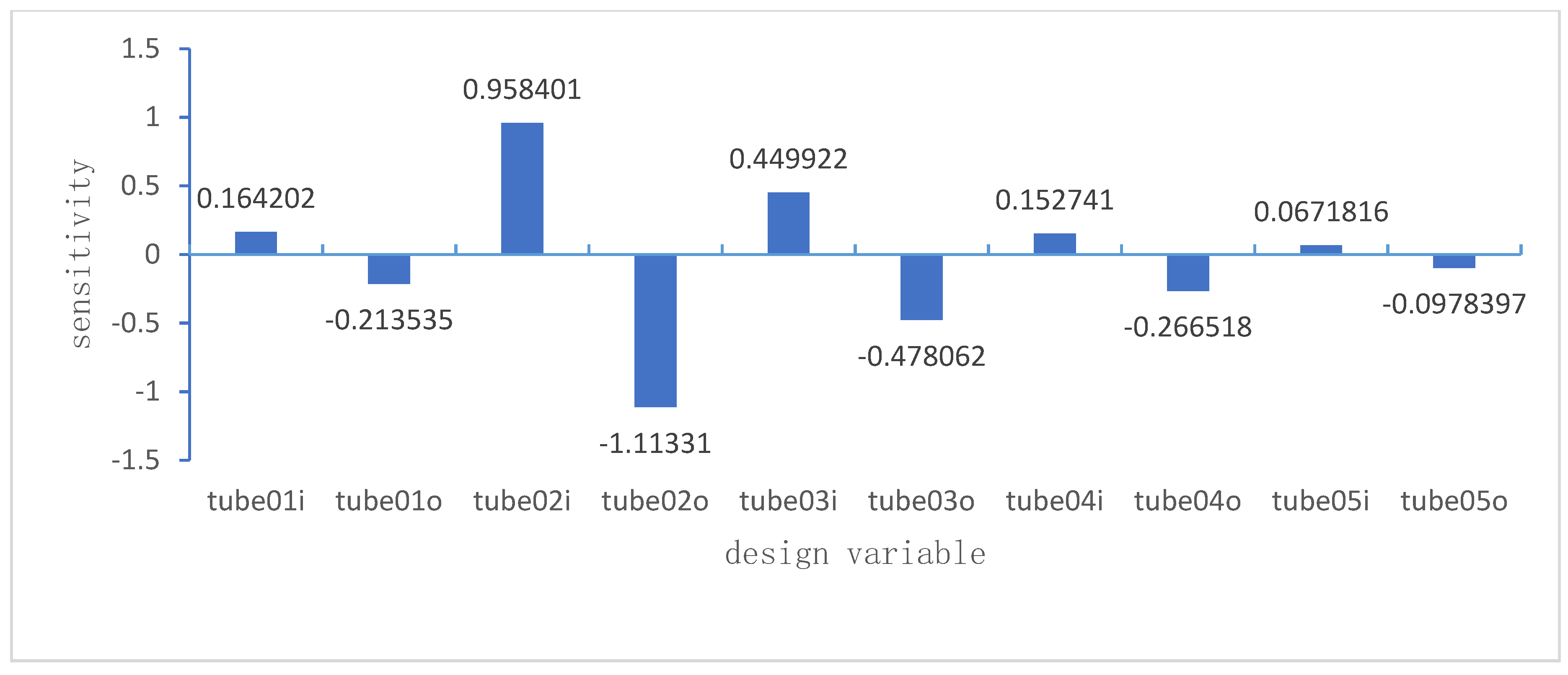
Figure 19.
Strain sensitivity under emergency braking conditions.
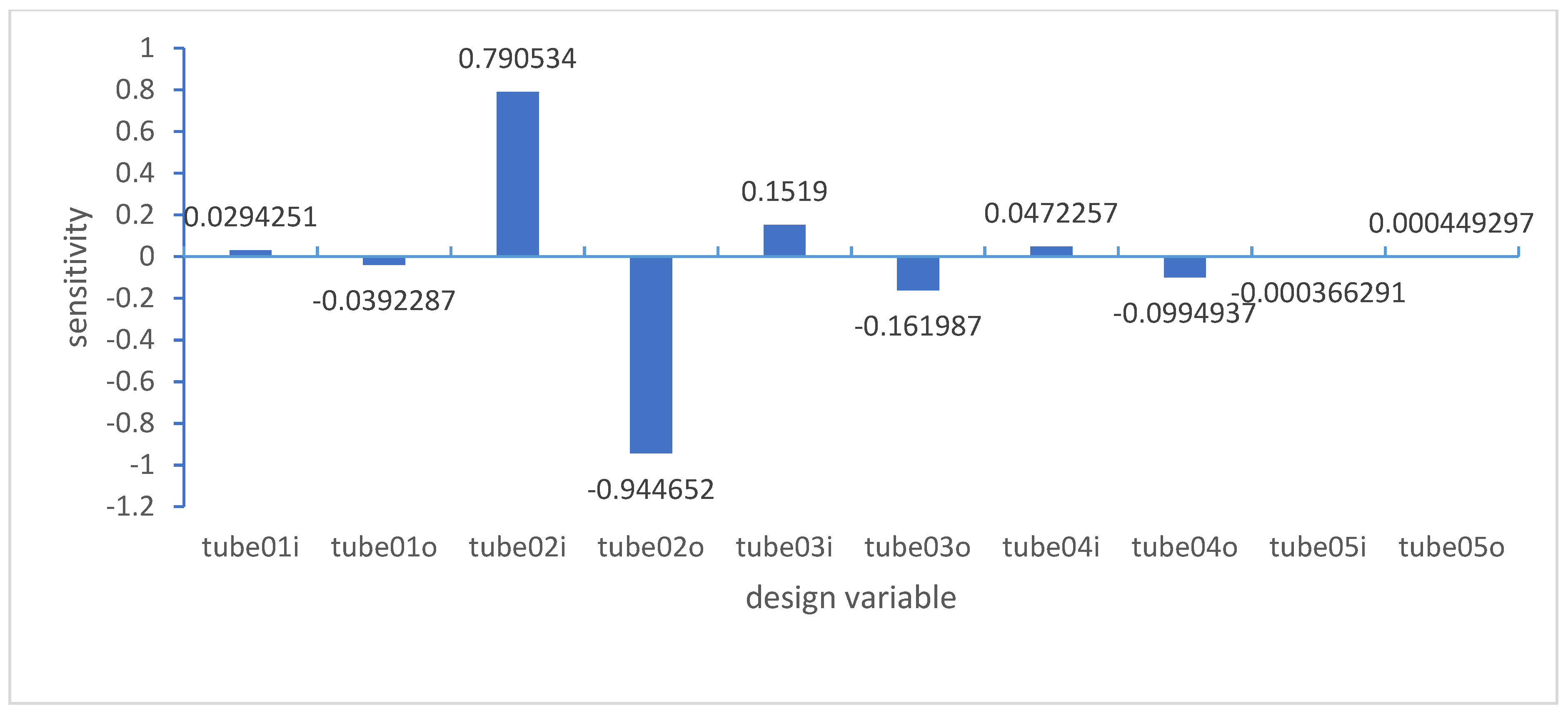
Figure 20.
Strain Sensitivity under High Speed Turning Conditions.
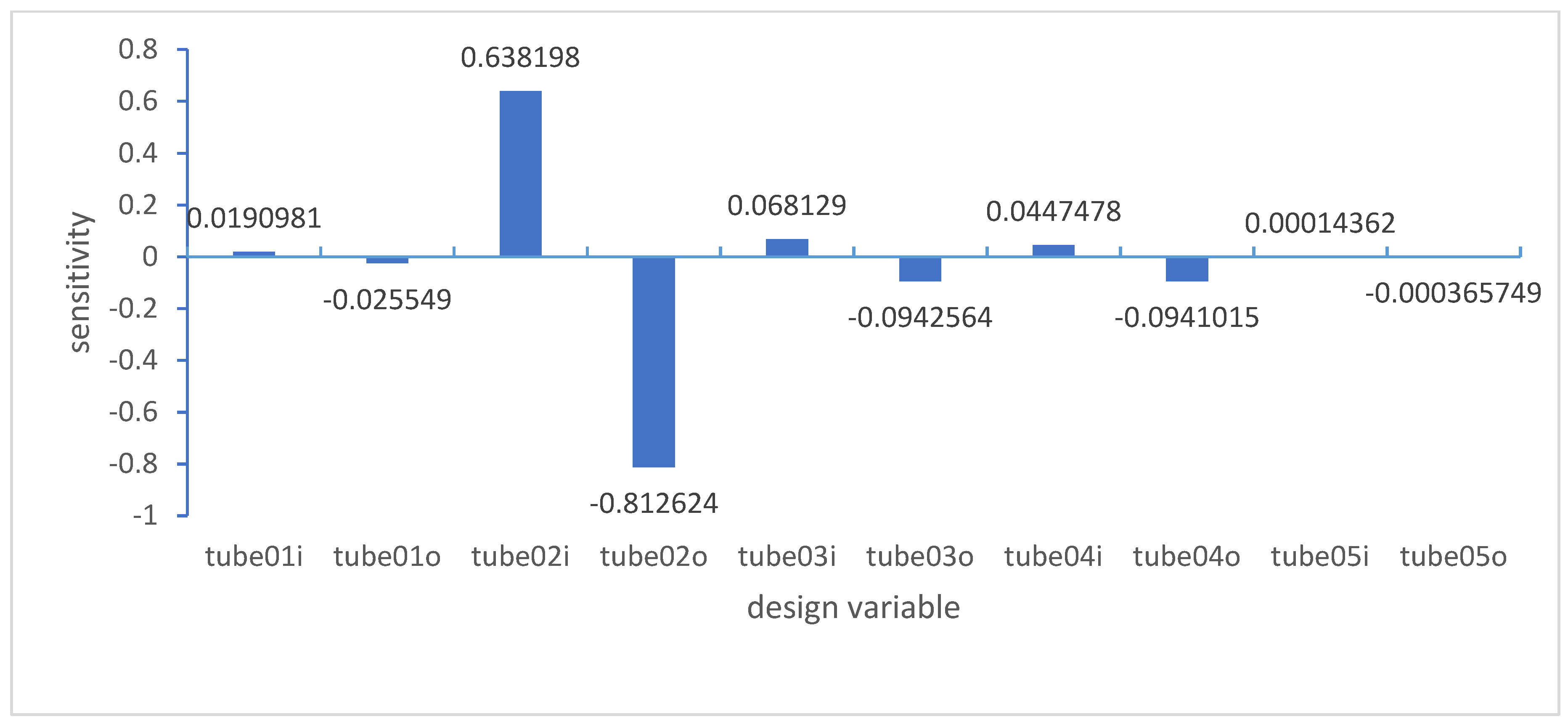

Table 2.
Optimization Results of Pipe Size for Part of the Frame.
| number | before optimization | after optimization | revised by | |||
| inside diameter /mm | outside diameter /mm | inside diameter /mm | outside diameter /mm | inside diameter /mm | outside diameter /mm | |
| 1 | 23.4 | 25.4 | 23.6 | 25.5 | 23.6 | 25.4 |
| 2 | 23.4 | 25.4 | 16 | 18.2 | 16 | 18 |
| 3 | 23.4 | 25.4 | 18.9 | 20.2 | 19 | 20 |
| 4 | 23.4 | 25.4 | 23.7 | 25.6 | 23.6 | 25.4 |
| 5 | 23.4 | 25.4 | 23.7 | 25.6 | 23.6 | 25.4 |
| 6 | 23.4 | 25.4 | 23.8 | 25.5 | 23.6 | 25.4 |
| 7 | 23.4 | 25.4 | 23.7 | 25.6 | 23.6 | 25.4 |
| 8 | 23.4 | 25.4 | 24.2 | 25.2 | 24.2 | 25.4 |
| 9 | 23.4 | 25.4 | 23.8 | 25.6 | 23.6 | 25.4 |
| 10 | 23.4 | 25.4 | 23.9 | 25.7 | 23.6 | 25.4 |
| 11 | 23.4 | 25.4 | 22.7 | 25.2 | 23 | 25.4 |
| 12 | 23.4 | 25.4 | 23.1 | 25.3 | 23 | 25.4 |
| 13 | 23.4 | 25.4 | 23.7 | 25.6 | 23.6 | 25.4 |
| 14 | 23.4 | 25.4 | 22.8 | 25.7 | 23 | 25.4 |
| 15 | 23.4 | 25.4 | 24.2 | 25.3 | 24.2 | 25.4 |
| 16 | 23.4 | 25.4 | 23.4 | 25.4 | 23.6 | 25.4 |
| 17 | 23.4 | 25.4 | 23.5 | 25.3 | 23.6 | 25.4 |
| 18 | 23.4 | 25.4 | 23.5 | 25.5 | 23.6 | 25.4 |
2.3.4. Comparison between optimized frame and original frame
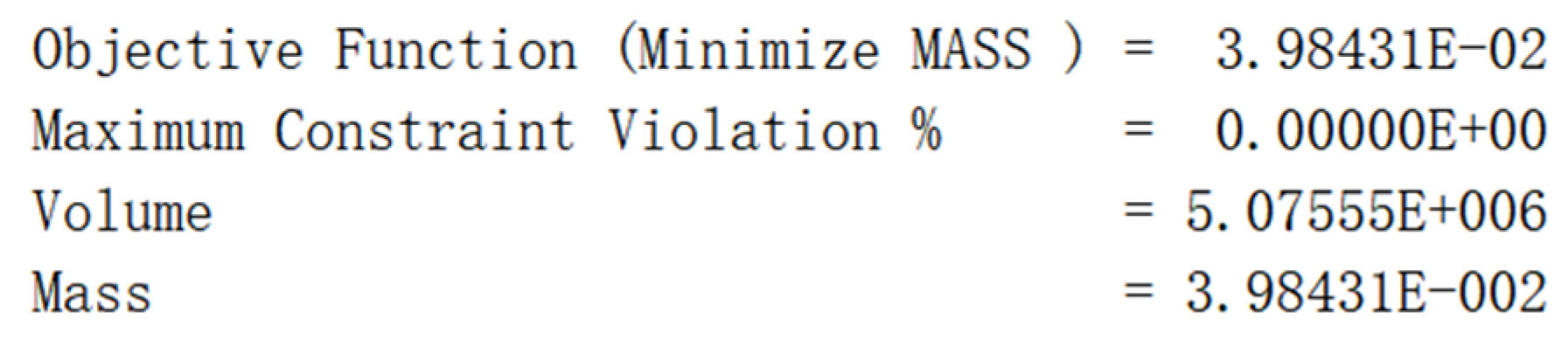
(1) Quality change: After optimizing the size based on the sensitivity analysis results, as shown in Table 2, the pipe diameter changes significantly for fittings 2 and 3, which means the wall thickness of the steel pipe decreases; The quality inspection section in the intercepted report is shown in Figures 21 and 22. The frame weight has decreased from 45.71 kg to 39.87 kg, a reduction of 12.8%.
Figure 21.
Starting mass.
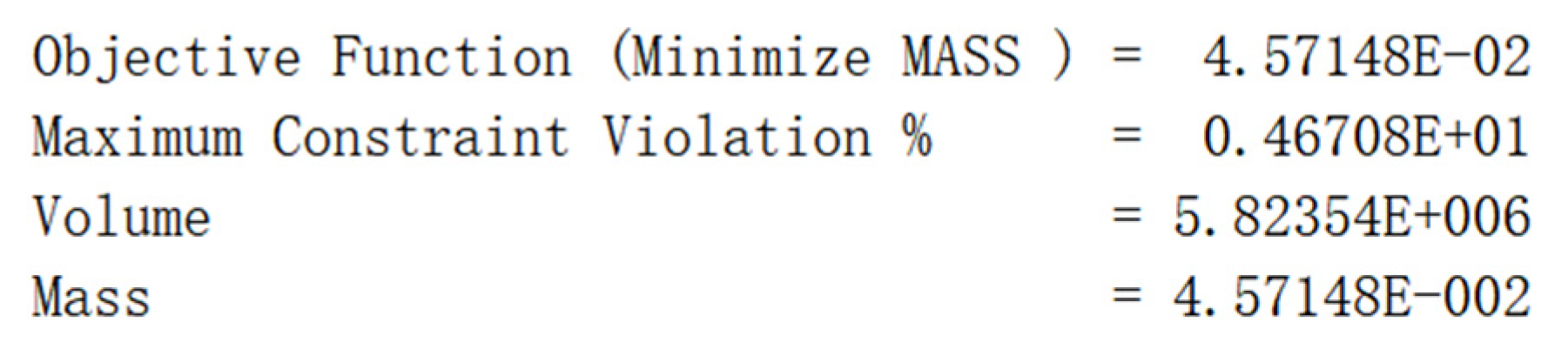
Figure 22.
Quality after optimization.
Strength change: As shown in Table 3, compared with the existing frame, the maximum displacement and maximum stress of the original frame have decreased to varying degrees under various working conditions, and the strength performance has been improved, and the modal has also been correspondingly improved.
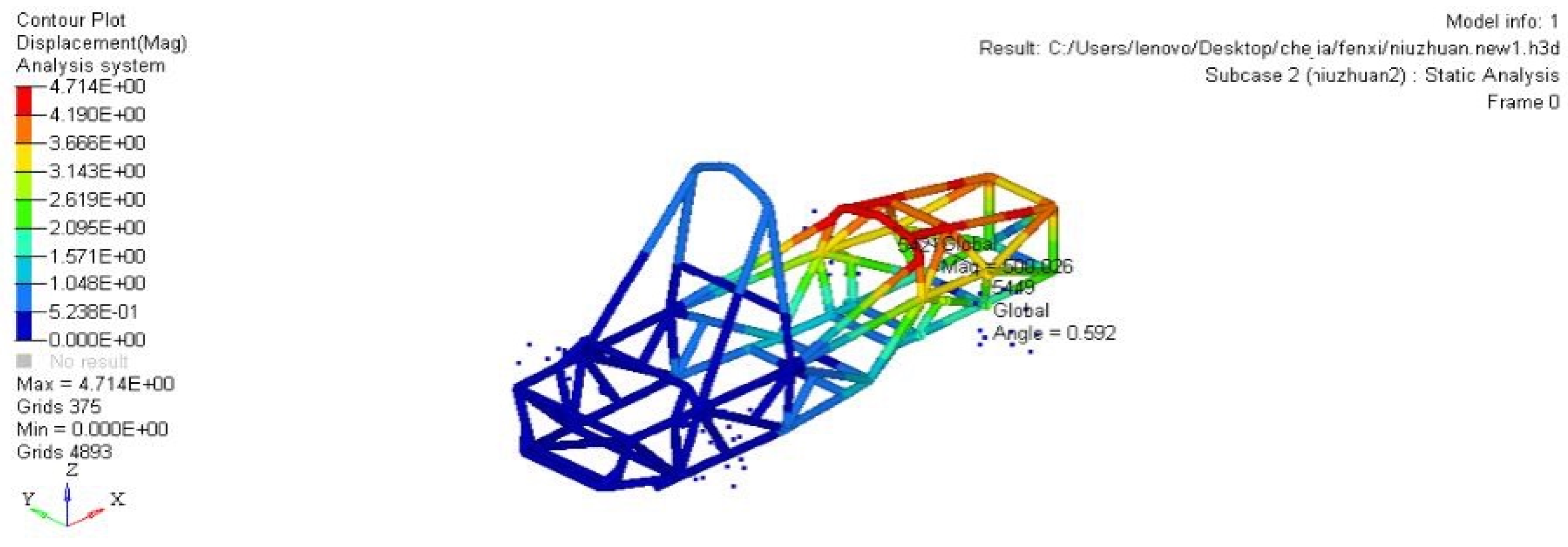
(3) Stiffness comparison: As shown in Figure 23, a force of 2000 N was applied to the optimized model under torsion conditions, resulting in a torsion angle of 0.592 °. According to the formula K=T/ θ The calculated stiffness is 1718.3 N ∙ m/°, which increases by 16.7% compared to the original torsional stiffness calculated in Section 1.4.2.
Figure 23.
Optimized Torsional Stiffness Related Data.
Based on the above analysis, the overall performance of the optimized frame has been improved, thus meeting the requirements of lightweight design.
3. Conclusions
In this paper, according to the rules of the competition, the three-dimensional geometric modeling of the frame is preliminarily established by CATIA V520 software. According to the force characteristics of the frame under braking, bending and turning conditions, the offset and stress distribution information of the frame under various conditions are obtained by using Hyperworks software, and the bending stiffness and torsional stiffness are measured, and the free mode analysis of the frame is carried out.
Then, the global topology optimization based on variable density method is proposed, and the distribution of materials is obtained from the analysis results. Then, the sensitivity analysis based on the adjoint variable method is proposed, and the influence factors of design variables are obtained. The size of the frame is optimized according to the weight, which reduces the weight of the frame. From this, the final version of the frame is designed. Finally, the performance of the existing frame is compared with the data of the original frame, and the conclusion that the performance of the frame is better than the original frame is reached, Thus achieving lightweight design.
References
- HETAWAL S, GOPHANE M, AJAYB K, et al. Aerodynamic study of formula SAE car[J]. Procedia Engineering, 2014, 97: 1198-1207. [CrossRef]
- SONG Shida. Joint study on aerodynamics and handling stability of FSAE racing car under unsteady wind [D]. Jilin University, 2021.
- YI Jun, XU Bin. Modeling and handling stability simulation of FSAE racing car based on ADAMS [J]. Engineering Design Journal, 2011, 18 (5) : 354-358.
- VAIDYA S, KULKARNI C. Aerodynamic Development of a Formula Sae Car: Initial Design Stage[J]. International Journal of Engineering Research & Technology (IJERT), 2017, 6(12): 14-18.
- GUIC, BAI J, ZUO W. Simplified crashworthiness method of automotive frame for conceptual design[J]. Thin-Walled Structures, 2018, 131: 324-335. [CrossRef]
- YU Haiyan, XU Hao, ZhOU Chenxiao. Optimization of single shell body of composite material for Formula Student Racing [J]. Journal of Tongji University : Natural Science Edition, 2016, 44 (11) : 1729-1734.
- HU Li, SHI Yaogui, YANG Qiliang. Optimization design of a certain type of college students ’ formula racing car frame based on finite element method [J]. Journal of Wuhan University of Science and Technology : Natural Science Edition, 2015, 38 ( 1 ) : 31-34.
- KONG Deying, LI Wei, XIAO Xiao. Lightweight design of Formula Racing Frame [J]. Mechanical design, 2021.
- Structural analysis and optimization design of FSC racing frame [D].Taiyuan University of Science and Technology, 2016.
- ABDI M, ASHCROFT I, WILDMAN R. Topology optimization of geometrically nonlinear structures using an evolutionary optimization method[J]. Engineering Optimization, 2018, 50(11): 1850-1870. [CrossRef]
- CHEN Yongping, Gao Liao, Xiao Mi. Topology optimization design of heat dissipation structure based on variable density method [J]. Computer integrated manufacturing system, 2018, 24 (1) : 117-126.
- ZHU B, CHEN Q, WANG R, et al. Structural topology optimization using a moving morphable component-based method considering geometrical nonlinearity[J]. Journal of Mechanical Design, 2018, 140(8): 081403. [CrossRef]
- ZHAN Jinqing, PENG Yiping, LIU Min, et al. Topology optimization design of continuum structures based on multi-performance constraints [J]. Computer integrated manufacturing system, 2022, 28 (6) : 1746.
- ZHU Xiaopeng, CHEN Lei, HUANG Jun. A new unit cell boundary condition for the mathematical homogenization method of composite periodic structures [J]. Journal of Computational Mechanics, 2021.
- ZHAO F. A nodal variable ESO (BESO) method for structural topology optimization[J]. Finite elements in Analysis and Design, 2014, 86: 34-40.
- ZUO K T, CHEN L P, ZHANG Y Q, et al. Manufacturing-and machining-based topology optimization[J]. The international journal of advanced manufacturing technology, 2006, 27(5): 531-536. [CrossRef]
- LU Jie, DING Jieyu. Direct differential method for sensitivity analysis of multibody system dynamics design [J]. Journal of Qingdao University : Engineering Technology Edition, 2004, 19 (4) : 76-79.
- KAMINSKI M. Material sensitivity analysis in homogenization of linear elastic composites[J]. Archive of Applied Mechanics, 2001, 71(10): 679-694.
- JANG W. Optimal Design for Torsional Stiffness of the Tubular Space Frame of a Low-Cost Single Seat Race Car[J]. Journal of the Korea Academia-Industrial cooperation Society, 2014, 15(10): 5955-5962.
- YUAN Shouli, LIN Jiahui. Design and lightweight of FSAE racing car frame [J]. Journal of Zhengzhou University ( Engineering Edition ), 2018, 4.
- CHEN H, LU C, LIU Z, et al. Structural modal analysis and optimization of SUV door based on response surface method[J]. Shock and Vibration, 2020.
- LI K, CHENG G. Structural topology optimization of elastoplastic continuous under shakedown theory [J] International Journal for Numerical Methods in Engineering, 2022, 123 (19): 4459-4482. [CrossRef]
- QIU F S, JI W Q, XU H C. Vertical Tail Topology Optimization Design Based on the Variable Density Method with Constraint Factor[C]//Applied Mechanics and Materials. Trans Tech Publications Ltd, 2013, 300: 280-284. [CrossRef]
- ARORA J S, CARDOSO J B. Variational principle for shape design sensitivity analysis [J] AIAA Journal, 1992, 30 (2): 538-547.
- CHUN J. Reliability-Based design optimization of structures using complex-Step approximation with sensitivity analysis[J]. Applied Sciences, 2021, 11(10): 4708. [CrossRef]
Table 1.
Frame Free Modal Analysis Results.
| Modal order | first order | second order | Third order | Fourth order | Fifth order | Sixth order |
| natural frequency | 36Hz | 45Hz | 71Hz | 79Hz | 90Hz | 118Hz |
Table 3.
Strength comparison before and after optimization.
| working condition | Original frame | Existing frame | Relative optimization quantity | |||
| Maximum displacement/mm | Maximum stress/MPa | Maximum displacement/mm | Maximum stress/MPa | Maximum displacement/mm | Maximum stress/MPa | |
| bending | 0.6847 | 62.44 | 0.4276 | 41.68 | 37.5% | 33.2% |
| braking | 1.125 | 114.6 | 0.9835 | 98.79 | 12.5% | 13.7% |
| Turning | 0.8838 | 85.05 | 0.8454 | 83.66 | 4.34% | 1.63% |
| reverse | 3.502 | 200.1 | 3.392 | 198.4 | 3.14% | 0.849% |
| modal | 35.99Hz | 36.74Hz | / | |||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



