
Submitted:
27 July 2023
Posted:
27 July 2023
You are already at the latest version
Abstract
To describe the hysteresis nonlinearities in smart actuators, numerous models have been presented in the literature, among which the Preisach operator would be the most effective one due to its capability in capturing multi-loop or sophisticated hysteresis curves. When such an operator is coupled with uncertain nonlinear dynamics, especially in noncanonical form, it is a challenging problem to develop techniques to cancel out the hysteresis effects, and at the same time achieve asymptotic tracking performance. To resolve this problem, in this paper, we investigate the problem of iterative inverse-based adaptive control for an uncertain noncanonical nonlinear systems with unknown input Preiasch hysteresis, and a new adaptive version of the closest match algorithm is proposed to compensate for the Preisach hysteresis. With our scheme, the stability and convergence of the closed-loop system can be established. The effectiveness of the proposed control scheme is illustrated by simulation and experiment results.
Keywords:
Adaptive control
; neural networks
; stability analysis
; piezoactuators
; noncanonical nonlinear systems
1. Introduction
Hysteresis widely occurs in the smart material-based actuators [1,2,3], such as electromagnetic actuators [4] and piezoelectric actuators [5]. Experiments show the system with hysteresis would perform poor tracking performance when the feedback control without explicitly considering hysteresis [6]. In order to compensate for the hysteresis nonlinearity in control design, a mathematical operator that can describe the characteristics of the hysteresis nonlinearity is needed. In the literature, the commonly used hysteresis models include the Preisach operator [7,8], the Duhem operator [9], the PrandtI-Ishlinskii (PI) operator [10], etc, among which the Preisach operator would be the most effective one due to its general and well-established mathematical structure and the ability in capturing multi-loop hysteresis curves and asymmetric hysteresis curves, where the hysteresis nonlinearity is modeled by a superposition of infinity weighted elementary relays. Then, the question naturally arises that how to compensate for the Preisach-type hysteresis nonlinearity.
It is well known that the traditional robust control methods are effective to accommodate the nonlinearities in the controlled system [11,12,13]. However, such control approaches cannot compensate for the hysteresis nonlinearity well and would lead to a significant degradation in the tracking performance of the system when the effects of hysteresis nonlinearity are considerable. Therefore, it becomes needed to employ some advanced methods for compensating the hysteresis nonlinearity. ln this regard, one of the fundamental approaches in effectively addressing hysteresis nonlinearity is inverse compensation[14,15,16,17,18], which aims to reduce or eliminate the hysteresis effects by constructing an approximate or right inverse hysteresis model. However, different from some certain hysteresis models, such as the PI operator (as a special case of the Preisach operator) and the Duhem operator, it is challenging to compute the analytical inverse of the Preisach operator. This difficulty arises due to the implicit involvement of the input signal within the operator [19].
To overcome the above challenge, Tan, Venkataraman, and Krishnaprasad propose the closest match algorithm [20], which is a classical iterative approximation algorithm for the Preisach inverse. In such an algorithm, the number of iterations does not exceed the discretization degree of the input, and the state of the thermostat relay operator (1) changes only once for each solution, which greatly saves the computation time [20,21]. By requiring the piecewise monotonicity and Lipschitz continuity of the Preisach operator and letting the density function be nonnegative and constant, the approximate inverse model based on the closest match algorithm is proposed in [22], for calculating the inverse of the Prerisach operator iteratively, and the convergence of the algorithm is proved. When the density function of the Preisach operator is unknown or not available for measurement, the previously mentioned open-loop inverse control is not available. In this case, the feedback information obtained from the hysteresis output can be utilized to estimate the density function of the Preisach operator by developing an iterative algorithm with an adaptive estimator, and ultimately reducing the inversion error. The above-mentioned iterative adaptive inverse control framework has been established in [21,23]. For an individual Preisach operator, the compensation scheme has been studied in great depth. However, these results only consider the hysteresis nonlinearity while neglecting the influence of the plant. When the Preisach operator couples with some system dynamics (for example, smart material-based actuators can be modeled as a Preisach operator precedes linear dynamics [24] or when the hysteretic actuator modeled by Preisach operator drives linear or nonlinear dynamics [21,25]), it is an unsolved and challenging problem to develop a new adaptive version of the closest match algorithm for compensating the Preisach hysteresis with complete convergence proof and stability analysis, especially when the dynamics of system are described as the noncanonical nonlinear system with parametric uncertainties [26].
The work of this paper is to develop an adaptive inverse control scheme for uncertain noncanonical nonlinear system with unknown input Preisach hysteresis. In scenarios where the Preisach operator precedes the dynamics of an uncertain noncanonical nonlinear systems, the hysteresis parameters, the hysteresis output, and the system parameters are all unknown and also the relative degree structure is implicit. In this situation, we propose an iterative adaptive inverse algorithm for the Preisach operator to effectively compensate for the hysteresis nonlinearity, where the adaptive estimator in the iterative algorithm is updated online. In summary, the work of this study has the following contributions:
1) A Lyapunov-based adaptive control scheme is proposed for uncertain noncanonical nonlinear systems with Preisach hysteresis inputs, with which all closed-loop signals can be ensured bounded, and the tracking error is steered into zero.
2) For our scheme, an adaptive version of the closest-matching is newly proposed to solve the inversion problem of the Preisach operator with unknown density function, and based on the piecewise-monotonicity and Lipschitz-continuity properties of the adaptive Preisach operator, the convergence of the iteration algorithm for inverting the Preisach operator is successfully established.
3) Besides theoretical analysis, the obtained results are also verified by simulation and experiment tests.
The rest of the paper is organized as follows. In Section 2, we introduce the Preisach operator and formulate the control problem. In Section 3, by utilizing the feedback linearization technique, we derive a certain condition to define the relative degree of neural-network approximation system in noncanonical form. In Section 4, we propose an adaptive tracking control scheme containing an iterative adaptive inverse algorithm for an uncertain neural-network approximation system with unknown input Preisach hysteresis, which is the main work of this paper. In Section 5, we give a simulation example with the corresponding results, which validate that the control scheme is effective. Finally, We give the conclusion in Section 6.
2. Background And System Modelling
This section provides a concise review of the Preisach operator and applies it to effectively capture the complex hysteresis nonlinearity discussed in this paper, and the control problem is formulated later.
2.1. The Hysteresis Model
The Preisach operator stands out among various hysteresis models due to its capability to accurately represent complex hysteresis curves, including multi-loop and asymmetric hysteresis curves, and it is constructed by the weighted superposition of infinity basic relay operators. Typically, the thermostat relay operators [21] are chosen as the fundamental components for constructing the Preisach operator as shown in Figure 1.
Thermostat relay operator: We first consider the Preisach plane as
which is a right triangle area and is consisted of a vertex coordinate () and a part of line . For a visual representation, we present the geometric interpretation of the Preisach plane in Figure 2. For any given point on the Preisach plane , there is a corresponding thermostat relay operator
where is the input of the thermostat relay operator with continuity and piecewise monotonicity and represents the initial value of the thermostat relay operator . For example, while and .
Preisach operator: The Preisach operator is constructed by the weighted superposition of infinity thermostat relay operators on the Preisach plane , which is presented as follows
where the weighting function also referred to the density function, and according to the definition of the Preisach operator, all points have the corresponding density function and when , the density function as shown in Figure 2.
Memory curve: The memory effects of the Preisach operator can be captured by the memory curve in the Preisach plane (as illustrated in [21]). When the Preisach input increases monotonically, the output of the thermostat relay operator above the threshold switches to and forms an upward-shifting curve. Similarly, when the Preisach input decreases monotonically, the output of the thermostat relay operator below the threshold switches to and forms a leftward-shifting curve. Then, in the Preisach plane , a piecewise monotone input signal can create the memory curve as shown in Figure 2, where the memory curve divides the plane into two parts:
and we can rewrite the integral (2) as
 which is an essential form to analyze the output range of the Preisach operator and to prove the piecewise monotonicity of the adaptive Preisach operator.
which is an essential form to analyze the output range of the Preisach operator and to prove the piecewise monotonicity of the adaptive Preisach operator.
Following the description of the Preisach operator, we proceed to introduce the considered plant model and formulate the adaptive control problem.
2.2. System Modeling
Consider the following uncertain noncanonical nonlinear system with unknown input Preiasch hysteresis:
where the represent the unknown unparametrizable system nonlinearities, denotes the system state vector, denotes the system output, are the unknown system parameters, the control input contains in the Preisach operator implicitly and is the Preisach output, which applies to the system directly. Since the Preisach hysteresis parameters are unknown, the output of the Preisach operator is not available for measurement, which poses a difficulty in compensating for hysteresis nonlinearity.
An approximation system: In our research, the system nonlinearities in (5) cannot be fully parameterized and are considered to be unknown, which poses a challenge in designing the control scheme for the original system (5) due to the lack of explicit characterization of these nonlinearities. To overcome such a challenge, we construct a parametrizable neural-network approximation system, which serves as an equivalent representation of the original system (5) over any desired compact set [26], which has the form as follows
where is a stable martrix, , is an unknown connection weigth martrix and a known activation functions vector, respectively.
Remark 1.
The nonlinear term in (6) is considered as the parameterizable uncertainties, which is capable to approximate unparametrizable uncertainties with arbitrary accuracy on a desired compact set. Hence, the proposed control scheme for the approximation system (6) in this paper is valid for the general noncanonical nonlinear system (5) with unparametrizable nonlinearities. By leveraging the neural-network approximation system as an equivalent representation, our control scheme provides a practical and viable solution for achieving desired control performance with unknown input Preisach hysteresis.
Considering the constructed approximation system (6), our control objective is to design a control input signal by cooperating the Lyapunov method with the iterative algorithm to ensure that the signals within the closed-loop system are bounded, and to achieve the asymptotic tracking performance.
3. Relative Degree Conditions and Stability of Zero Dynamics Subsystem
In this paper, our main focus is on dealing with the control problem for noncanonical nonlinear systems with input hysteresis by adaptive control techniques, specifically in the relative-degree-one case. It should be pointed out that the relative degree greater than one case remains an open area for future research and will be considered in our future work. This noncanonical neural network system can be considered as a general nonlinear system so that the feedback linearization theory can be used to define its relative degree and later we will give the certain condition of the relative-degree-one case.
Relative Degree Conditions: By combining the definition of relative degree [27] with the noncanonical nonlinear system (6), we establish the following necessary condition for the cases where the system has a relative degree of one.
Lemma 1.
The approximation system (6) preceded by the Preisach operator has relative degree if and only if
The approximation system (6) can be equivalently transformed into the general nonlinear system , and from the feedback linearization conclusions, Lemma 1 can be proved straightforwardly.
Lemma 2.
Suppose the approximation system (6) has relative degree ϱ on the compact set Ψ. To facilitate analysis and control design, we employ a diffeomorphism where
which can transform the system into two subsystems [28]. The first subsystem, known as the tracking dynamics subsystem, is dedicated to achieving accurate tracking of a desired reference signal, and it is defined as follows
The second subsystem, referred to as the zero dynamics subsystem, is of great importance to ensure the convergence and stability of the system’s internal dynamics. It has the form as follows
Stability of the zero dynamics system: By utilizing the feedback linearization technique, the approximate system (6) can be divided into two subsystems (as illustrated in Lemma 2). The zero dynamic subsystems among them does not contain control inputs. Therefore, the stability of the zero dynamic subsystem needs to be guaranteed to ensure that the control scheme developed for the noncanonical nonlinear system with input hysteresis in this paper is available. The following Assumption will satisfy our requirement.
Assumption 1.
Remark 2.
Based on Assumption A1, we can establish the following inequality
where , are the proper constants. What inequality (11) means is that the state vector in (9) is bounded, with the bounded input vector . Such a conclusion is called bounded-input bounded-state (BIBS) stability [30], which indicates that the response of the system remains within a certain range in the presence of disturbances or external inputs.
4. Adaptive Inverse Control Scheme For Relative-Degree-One Case with Preisach Hysteresis
This section proposes a control scheme for the relative-degree-one case of the uncertain noncanonical nonlinear neural-network system (6) with input Preisach hysteresis, for which the necessary condition is given in (7), and the procedure for designing the control scheme is detailed as follows.
4.1. System Parameterization
According to Lemma 1, the relative degree of the approximation system (6) is one when it satisfies , which leads to the formulation of the tracking control dynamics subsystem that can be expressed as follows
where the system parameters are all unknown. For the tracking control study, the following basic Assumption is needed.
This assumption guarantees the design procedure of the control scheme is free from any unknown control direction problems.
For ease of adaptive control scheme design, the system (12) needs to be reparameterized. We introduce some new parameters to transform the system into a more suitable form for adaptive control scheme design. Let represent a parameter vector, denote the state vector, and represent the modified density function, and then the system (12) can be expressed as follows
Assumption 3.
The modified density function defined on a finite right triangle plane takes values between two known nonnegative bounded values and for , which means that .
Assumption A3 will be used later on in a projection design to equip the adaptive estimate of with nonnegativity and boundedness properties.
4.2. Implicit Controller Equation
To compensate for the input hysteresis nonlinearity and to construct a tracking error system with asymptotic convergence property, we develop an adaptive Preisach inverse implicit controller as follows
where and are the estimates of and respectively, and is a positive constant. The implicit controller equation (14) consists of an adaptive Preisach operator with as the adaptive estimate of on the left sides and the desired output of the adaptive Preisach operator on the right sides. Then, we define
and the implicit controller equation (14) is rewritten as
The next task is to solve the implicit controller equation (17), so that we can computed the control input in real time. This is essentially equivalent to constructing the inverse function , and we will next propose an inverse iterative algorithm to solve it.
A closest match algorithm for solving the implicit controller equation (17) and its convergence proof: Given that the desired output of the adaptive Preisach operator has a continuous, piecewise monotone behavior over the defined time interval , where the partition is
for a positive integer , and during each sub-interval , , is monotone. Then, the implicit controller equation (17) will be solved on each sub-interval . It will be shown on the analysis of Remark 4 that the adaptive estimate density function changes slowly with time. In this sense, we can assume that during each sub-intervals , . With this in mind, the adaptive Preisach operator can be expressed as
With a projection design latter, is ensured boundedness as and nonnegativity for and . Then, from the third equality of (4), it is not hard to prove that the adaptive Preisach operator has monotonicity on each sub-interval , and the output range of can be obtained from the following equation during :
For the implicit controller equation (17) to have a solution, the following constructed saturation condition is necessary:
where . The limitation of the output range (20) stems from the fact that the Preisach operator is a saturated hysteresis model and the saturation occurs when the control input above the upper threshold or below the lower threshold .
Suppose that the condition (20) is satisfied. There are two discretization steps involved, the discretization of the time interval has been described in (18) and the discretization range of the adaptive Preisach operator (15) input is uniformly divided into L segments as where , , and L is called the discretization level. The result of discretizing the input range R is that the Preisach plane is divided into cells. Considering the plane with discretization degree L, and within each discretization cell, assuming the density function on (15) be nonnegative and remains constant. The inversion problem is, given the desired instaneous value of , and the memory curve generated by the previous input, to find the corresponding input signal such that the equality is satisfied, which can be calculated by the following algorithm [22]:
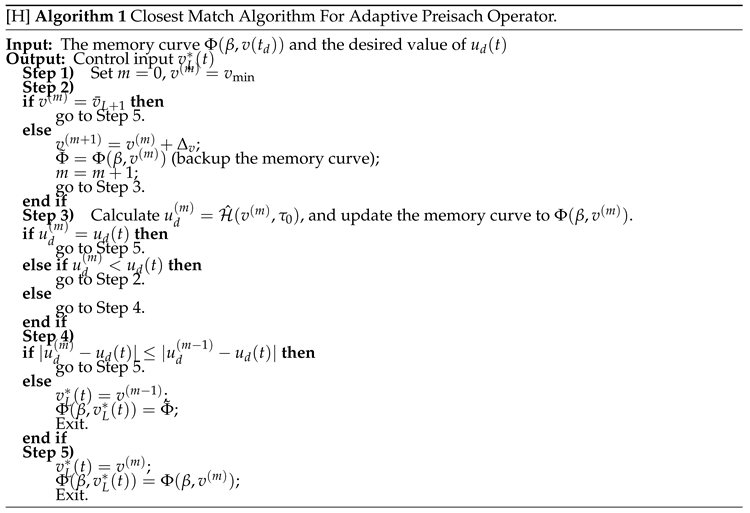
The algorithm is based on the piecewise monotonicity property of the adaptive Preisach operator , and it is not hard to see that the algorithm obtains the solution in at most L times. The convergence of the above iterative algorithm is given below.
Proposition 1.
Under Assumption 1-3, suppose that condition (20) is satisfied. Then, the iterative algorithm can find a solution such that
Besides, as the discretization degree goes to infinity, we can find the exact solution of the inverse problem, i.e., .
Proof.
Our task is to prove the piecewise monotonicity and Lipschitz continuity of the adaptive Preisach operator (15), based on this property we can follow the arguments as Proposition 5.1 in [22] to prove Proposition 1.
As previously demonstrated, it has been established that the adaptive Preisach operator (15) can be represented in the form of (19) during the sub-intervals with the adaptive density function is nonnegative. Then, from the third equality of (4), the following inequality holds
for . Hence, the adaptive Preisach operator (15) is piecewise monotone on for the continuous, piecewise monotone control input signal on . Besides, with the projection design later, the adaptive density function is guaranteed to be nonnegative and bounded for , and . Then, based on the piecewise expression (19), we can obtain the following Lipschitz continuity property:
for , where is a Lipschitz constant.
Up to now, we have provided an iterative algorithm that the control input signal in the implicit controller equation can be computed iteratively, and finally, the convergence of this iterative algorithm is proved. Next, we will analyze the performances of the adaptive control scheme.
4.3. Performance Analysis
Since the limitations of computation time and the efficiency of the iterative algorithm, obtaining an exact solution within a finite number of iterations is challenging. Therefore, the implicit control equation (14) can be reformulated as follows
where is the bounded iteration error. With the iteration results as the control input, substituting (13) into (24), we have the tracking error equation as follows
where , and the adaptive parameters error and .
Remark 3.
In practical engineering applications, a proper bounded discretization degree L ensures that , where ϵ is an acceptable minor positive constant in engineering applications. Hence, we consider the iterative error as an external disturbance and use the following tracking error equation (26) for the next analysis in this paper.
By considering the tracking error equation (26), we choose the positive definite function as
where and are the adaptive parameters for adaptive laws. Then, the time derivation of is
Lyapunov-based adaptive control scheme: To make , the update laws for the estimates and are chosen as
where , , and are the brief representations of , , and , respectively. By choosing the initial value of within the range , the projection design (30) ensures that and for . Therefore, we have the following results for the
Theorem 1.
Under Assumptions 1-3 and Proposition 1, all signals in the closed-loop system consisted of the noncanonical nonlinear system (6), the Preisach operator (2), the iterative inverse algorithm, and the implicit controller (14) which is updated by the adaptive laws (29)-(30), are bounded, and the tracking error satisfies
Proof.
Substitute the adaptive laws (29)-(30) into the derivation of V (28), we can derive that
Since is a positive constant, we have . Then, , , and are bounded, which implies that is bounded. From Assumption 1, we can establish the inequality that for a proper constant , thus and are bounded. From the desired output of the adaptive Preisach operator (16), we can derive the boundedness of , then, the boundedness of all the closed-loop signals is established. Next, we will show the properties that and . Integrating both sides of the first inequality in the derivation of V in (31) yields that , so . From the tracking error equation (26), it clearly shows that is bounded. Therefore, using Barbalat’s Lemma, we can obtain that . □
Remark 4.
Since and , with the projection design in (30), it is not hard to derive that
which means that , the adaptive estimate of , changes very slowly and eventually converges to a time-independent value . Besides, the adaptive estimate is limited to a compact set by the projection design (30), which means that the would not be large. Then, during on each sub-interval , , we can consider on the iterative algorithm for , and would not affect the performance of the system.
5. Simulation Study
This section presents the simulation results for the relative-degree-one case of noncanonical nonlinear approximation system (6) with unknown parameters and preceded by the Preisach hysteresis operator. The purpose in this section is to provide strong evidence for the proposed adaptive control scheme in achieving the desired tracking performance as illustrated in Theorem 1, which guarantees the tracking error converges to zero as time goes to infinity.
5.1. Experimental Equipment
We developed a piezoactuator-driven stage as the experimental platform, which mainly consists of four parts: 1) an E01 piezoelectric ceramic controller including a communication module E18.i3, a sensor control module E09.S3/L3 and a power amplifier module E03.00, which has a voltage output range of 0-150 V; 2) a piezoelectric actuator, which has a displacement output of 0-40 ; 3) a vibration isolation table, which serves the purpose of isolating the experiment equipment from external vibration; 4) a computer with MATLAB R2020a (see Figure 3).
5.2. Hysteresis Identification
As the only parameter of the Preisach operator, the upper and lower bounds of the density function play an important role in ensuring the convergence of the iterative algorithm. Unreasonable settings of these bounds can seriously affect output accuracy. Therefore, it is necessary to perform systematic identification of the actual piezoelectric actuator, and then determine the upper and lower bounds of the estimator based on the identification result. With this in mind, we employ a gradient descent algorithm to identify the density function. In this experiment, a triangular wave is chosen as the voltage input signal at 5 Hz with a range from 0 V to 115 V and we set the sampling rate as 1 kHz. Then, the identified density function is shown in Figure 4a. To evaluate the hysteresis curve matching degree between the one generated by the Preisach operator with identified density function and the experiment measurement, the voltage input is chosen as a triangular wave signal at 5 Hz within the range of V to 55V and the result is shown in Figure 4b, which provides a close resemblance between the two curves.
5.3. Simulation System Modeling
In the simulation experiments, we follow the noncanonical nonlinear approximation system (6) for the system parameter design, where ,
and the activation functions vector with
The Preisach operator plane is defined by the thresholds and .
The initial control input is chosen as , with the definition of memory curve, we have . The initial output of Preisach operator is with the density function obtained from identification. The initial value of the state vector is chosen as , and a basic sinusoidal function is chosen as the reference signal.
5.4. Simulation Results
Initial parameters and design parameters: It is not hard to derive that the simulation system satisfies the condition: , and then the adaptive scheme for relative-degree-one case in Section 4 can be used to control this system. With the diffeomorphism , the noncanonical nonlinear approximation system (6) can be transformed into a tracking dynamics subsystem and a zero dynamics subsystem with BIBS stability, and satisfies the Assumption 1. By a simple calculation, the norminal parameters are , , which are unknown for the control design and estimated by and , respectively. The lower and upper bounds of are chosen as and for the projection design, where is obtained from the identification result. The initial parameters are chosen as and . Other design parameters are chosen as , and .
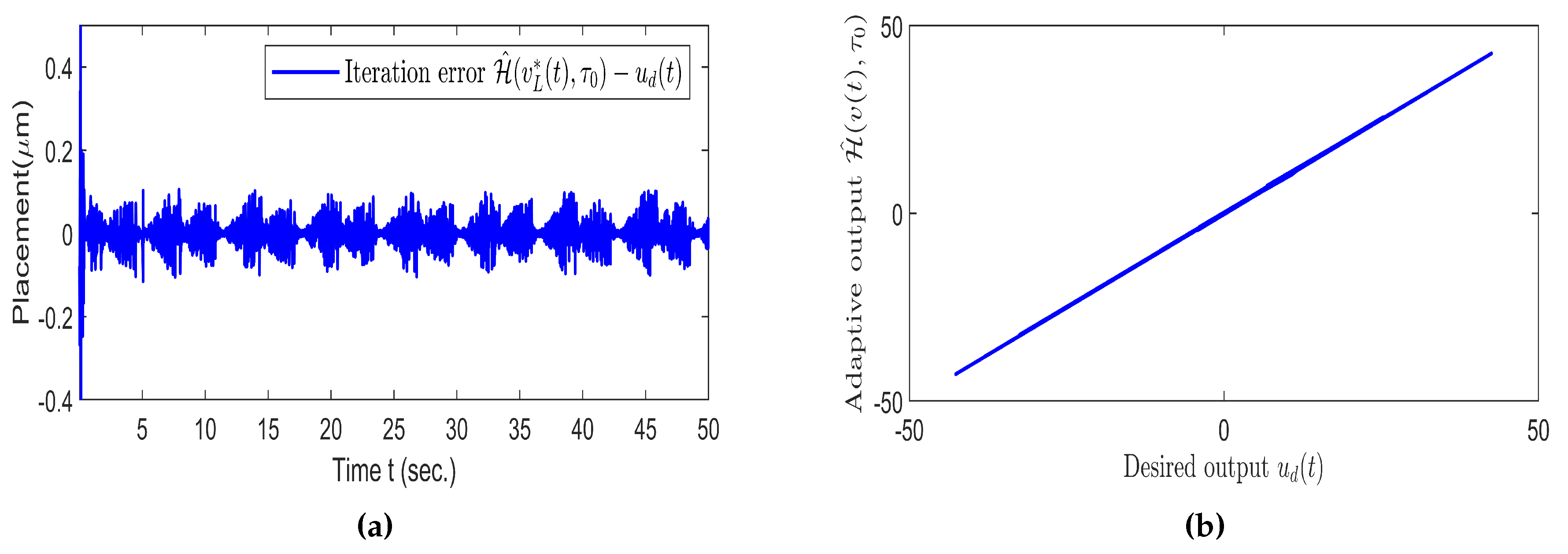
Simulation results and analysis: By employing the proposed adaptive control scheme in the simulation system, the tracking performance is depicted in Figure 5a which confirms the desired behavior of the control scheme and shows that the output converges to the reference signal over time. Figure 5b shows that the tracking error gradually diminishes and eventually converges to zero over time. Furthermore, Figure 5c shows the boundedness of the system input and control input . As an example to confirm that the estimate changes very slow and eventually converge to a time-independent value as illustrated in Remark 4, Figure 5d shows the trajectories of and vs. time. With the discretization level , Figure 6a shows that the iteration error is within the range of , where the control input is calculated using the iterative algorithm in the implicit control equation (17). The results confirm the convergence of the iterative algorithm established in Proposition 1. The effectiveness of iterative algorithm is shown in Figure 6b, we can see that the desired one is well achieved by the adaptive operator .
6. Conclusion
We have developed an iterative inverse-based adaptive control scheme for the uncertain nonlinear system in the noncanonical form with unknown input Preisach hysteresis. The control scheme utilizes a new adaptive version of the closest match algorithm to effectively compensate for the unknown hysteresis effects. The convergence of the iterative algorithm was established by demonstrating the piecewise monotonicity and Lipschitz continuity of the adaptive Preisach operator . Furthermore, we conducted the complete stability analysis of the closed-loop system. The simulation results serve as strong evidence for the proposed control scheme in achieving desired tracking performance.
Author Contributions
Conceptualization, G.L.; methodology, W.Y.; software, G.D.; validation, G.L. and G.D.; formal analysis, G.D. and X.W.; writing—original draft preparation, W.Y.; writing—review and editing, W.L.and X.W., G.D. and X.S; All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the Tertiary Education Scientific research project of Guangzhou Municipal Education Bureau [No.202235364], and the Special projects in key fields of colleges and universities in Guangdong Province [No.2021ZDZX1109], and the Research project of Guangzhou City Polytechnic[No.KYTD2023004], and the National Natural Science Foundation of China [No.6210021076], and the Guangzhou Municipal Science and Technology Project [No.202201010381].
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Acknowledgments
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Zaman, S.; Leyva, A.; Hassan, M.S.; Valladolid, A.; Herrera, N.E.; Gomez, S.G.; Mahmud, M.S.; Tucker, D.; Haynes, C.; Lin, Y. Implementation of Smart Materials for Actuation of Traditional Valve Technology for Hybrid Energy Systems. Actuators 2023, 12. [Google Scholar] [CrossRef]
- Frolova, L.; Ryba, T.; Diko, P.; Kavecansky, V.; Milkovic, O.; Dzubinska, A.; Reiffers, M.; Vargova, Z.; Varga, R. Smart Shape Memory Actuator Based on Monocrystalline Ni2FeGa Glass-Coated Microwire. IEEE Transactions on Magnetics 2018, 54, 1–5. [Google Scholar] [CrossRef]
- Bocchetta, G.; Fiori, G.; Sciuto, S.A.; Scorza, A. Performance of Smart Materials-Based Instrumentation for Force Measurements in Biomedical Applications: A Methodological Review. Actuators 2023, 12. [Google Scholar] [CrossRef]
- Chen, L.; Niu, Y.; Yang, X.; Zhu, W.L.; Zhu, L.M.; Zhu, Z. A Novel Compliant Nanopositioning Stage Driven by a Normal-Stressed Electromagnetic Actuator. IEEE Transactions on Automation Science and Engineering 2022, 19, 3039–3048. [Google Scholar] [CrossRef]
- Baziyad, A.G.; Ahmad, I.; Salamah, Y.B.; Alkuhayli, A. Robust Tracking Control of Piezo-Actuated Nanopositioning Stage Using Improved Inverse LSSVM Hysteresis Model and RST Controller. Actuators 2022, 11. [Google Scholar] [CrossRef]
- Chen, L.; Zhu, Y.; Ling, J.; Zhang, M. Development and Characteristic Investigation of a Multidimensional Discrete Magnetostrictive Actuator. IEEE/ASME Transactions on Mechatronics 2022, 27, 2071–2079. [Google Scholar] [CrossRef]
- Adly, A.; Mayergoyz, I.; Bergqvist, A. Preisach modeling of magnetostrictive hysteresis. Journal of Applied Physics 1991, 69, 5777–5779. [Google Scholar] [CrossRef]
- Preisach, F. Über die magnetische Nachwirkung. Zeitschrift für physik 1935, 94, 277–302. [Google Scholar] [CrossRef]
- Li, R.; Feng, Y.; Hu, Z. Dynamic Surface Control of Shape Memory Alloy Actuating Systems with Inverse Duhem Hysteresis Compensation. 2018 IEEE International Conference on Mechatronics and Automation (ICMA). IEEE, 2018, pp. 1305–1310.
- Brokate, M.; Sprekels, J. Hysteresis and Phase Transitions. Springer New York eBooks 1996. [Google Scholar]
- Rehman, O.U.; Petersen, I.R. Using inverse nonlinearities in robust output feedback guaranteed cost control of nonlinear systems. IEEE Transactions on Automatic Control 2014, 60, 1139–1144. [Google Scholar] [CrossRef]
- Köhler, J.; Soloperto, R.; Müller, M.A.; Allgöwer, F. A computationally efficient robust model predictive control framework for uncertain nonlinear systems. IEEE Transactions on Automatic Control 2020, 66, 794–801. [Google Scholar] [CrossRef]
- Wang, A.; Liu, L.; Qiu, J.; Feng, G. Event-triggered robust adaptive fuzzy control for a class of nonlinear systems. IEEE Transactions on Fuzzy Systems 2018, 27, 1648–1658. [Google Scholar] [CrossRef]
- Li, Z.; Shan, J.; Gabbert, U. Inverse compensation of hysteresis using Krasnoselskii-Pokrovskii model. IEEE/ASME Transactions on Mechatronics 2018, 23, 966–971. [Google Scholar] [CrossRef]
- Li, Z.; Shan, J.; Gabbert, U. A direct inverse model for hysteresis compensation. IEEE Transactions on Industrial Electronics 2020, 68, 4173–4181. [Google Scholar] [CrossRef]
- Li, Z.; Su, C.Y.; Chai, T. Compensation of hysteresis nonlinearity in magnetostrictive actuators with inverse multiplicative structure for Preisach model. IEEE Transactions on Automation Science and engineering 2013, 11, 613–619. [Google Scholar] [CrossRef]
- Zhang, J.; Iyer, K.; Simeonov, A.; Yip, M.C. Modeling and inverse compensation of hysteresis in supercoiled polymer artificial muscles. IEEE Robotics and Automation Letters 2017, 2, 773–780. [Google Scholar] [CrossRef]
- Li, Z.; Shan, J.; Gabbert, U. Inverse compensator for a simplified discrete Preisach model using model-order reduction approach. IEEE Transactions on Industrial Electronics 2018, 66, 6170–6178. [Google Scholar] [CrossRef]
- Visone, C. Hysteresis modelling and compensation for smart sensors and actuators. Journal of Physics: Conference Series. IOP Publishing, 2008, Vol. 138 1, p. 012028.
- Tan, X.; Venkataraman, R.; Krishnaprasad, P.S. Control of hysteresis: Theory and experimental results. Smart Structures and Materials 2001: Modeling, Signal Processing, and Control in Smart Structures. SPIE, 2001, Vol. 4326, pp. 101–112.
- Iyer, R.V.; Tan, X. Control of hysteretic systems through inverse compensation. IEEE Control Systems Magazine 2009, 29, 83–99. [Google Scholar] [CrossRef]
- Iyer, R.V.; Tan, X.; Krishnaprasad, P. Approximate inversion of the Preisach hysteresis operator with application to control of smart actuators. IEEE Transactions on automatic control 2005, 50, 798–810. [Google Scholar] [CrossRef]
- Tan, X.; Baras, J.S. Adaptive identification and control of hysteresis in smart materials. IEEE Transactions on automatic control 2005, 50, 827–839. [Google Scholar]
- Tan, X.; Baras, J.S. Modeling and control of hysteresis in magnetostrictive actuators. Automatica 2004, 40, 1469–1480. [Google Scholar] [CrossRef]
- Li, Z.; Zhang, X.; Su, C.Y.; Chai, T. Nonlinear Control of Systems Preceded by Preisach Hysteresis Description: A Prescribed Adaptive Control Approach. IEEE Transactions on Control Systems Technology 2016, 24, 451–460. [Google Scholar] [CrossRef]
- Zhang.; Yanjun.; Tao.; Gang.; Chen.; Mou.. Adaptive Neural Network Based Control of Noncanonical Nonlinear Systems. IEEE Transactions on Neural Networks & Learning Systems 2016.
- Isidori, A. Nonlinear Control Systems; Springer Science & Business Media, 1995.
- Ma, X.; Tao, G. Adaptive actuator compensation control with feedback linearization. IEEE Transactions on Automatic Control 2000, 45, 1705–1710. [Google Scholar] [CrossRef]
- Sastry, S.; Bodson, M.; Bartram, J.F. Adaptive control: stability, convergence, and robustness, 1990.
- Ioannou, P.A.; Sun, J. Robust adaptive control; Vol. 1, PTR Prentice-Hall Upper Saddle River, NJ, 1996.
- Lai, G.; Tao, G.; Zhang, Y.; Liu, Z. Adaptive control of noncanonical neural-network nonlinear systems with unknown input dead-zone characteristics. IEEE Transactions on Neural Networks and Learning Systems 2019, 31, 3346–3360. [Google Scholar] [CrossRef]
Figure 1.
A thermostat relay operator .
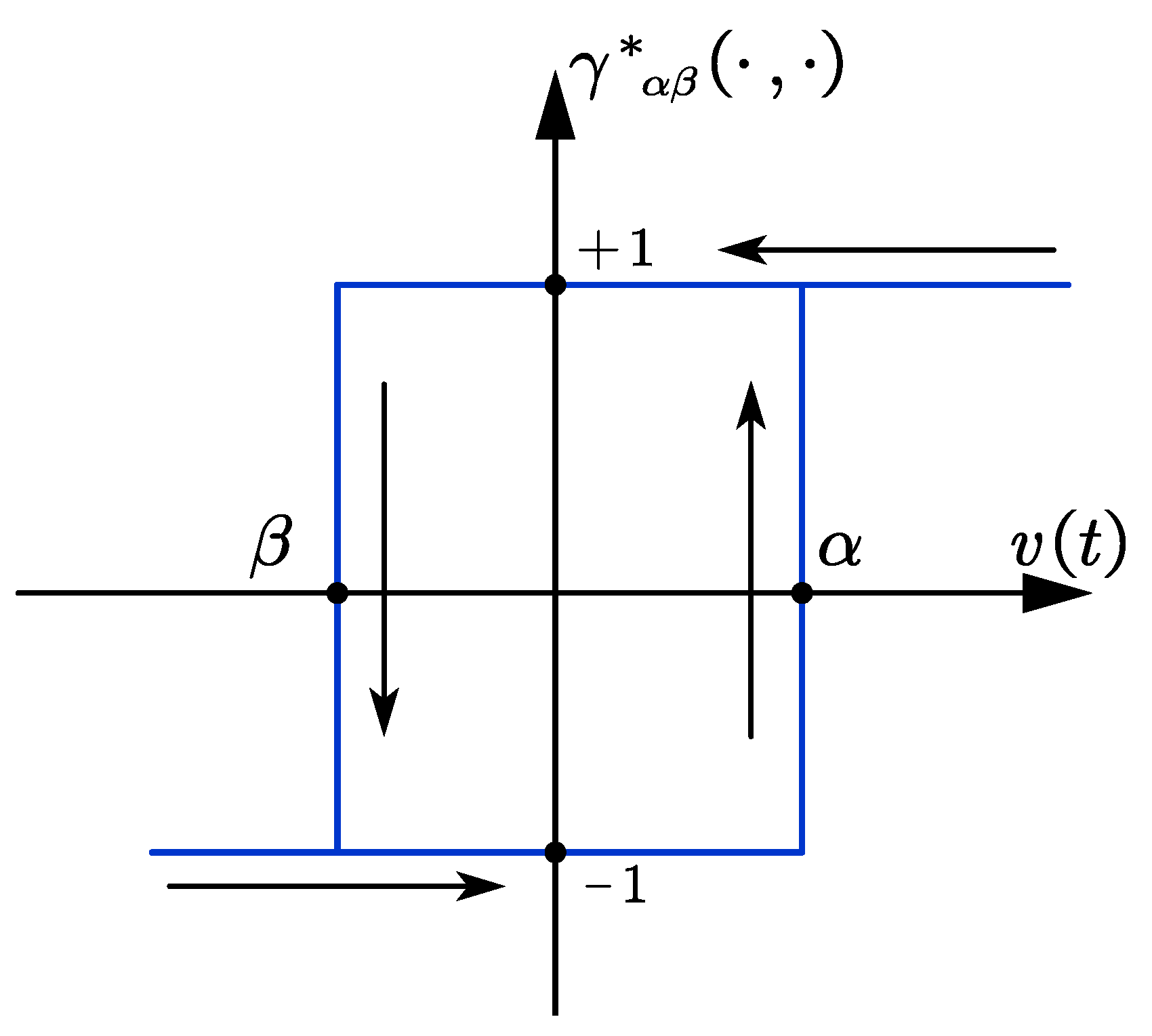
Figure 2.
The Preisach plane and memory curve.
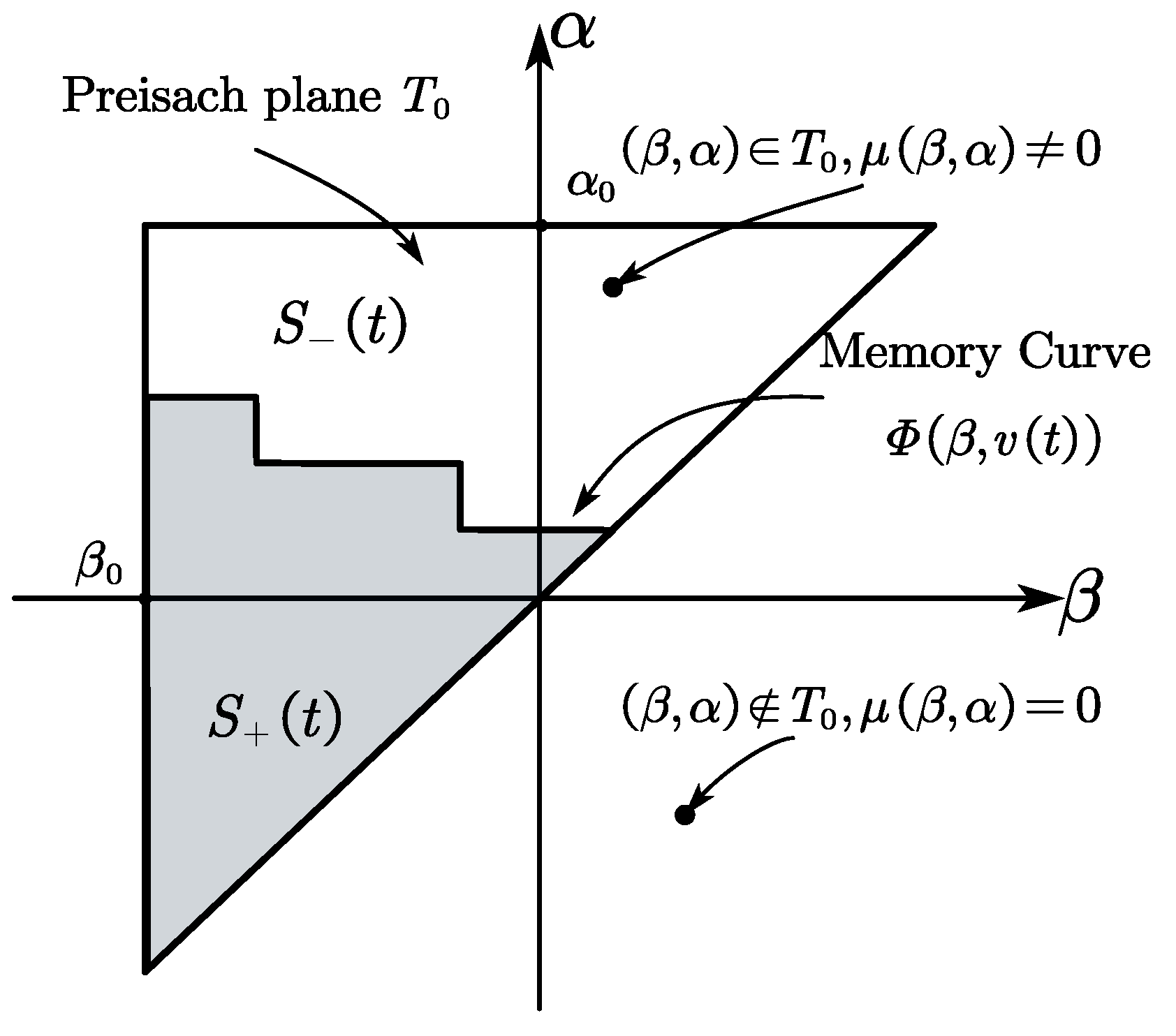
Figure 3.
Experimental platform
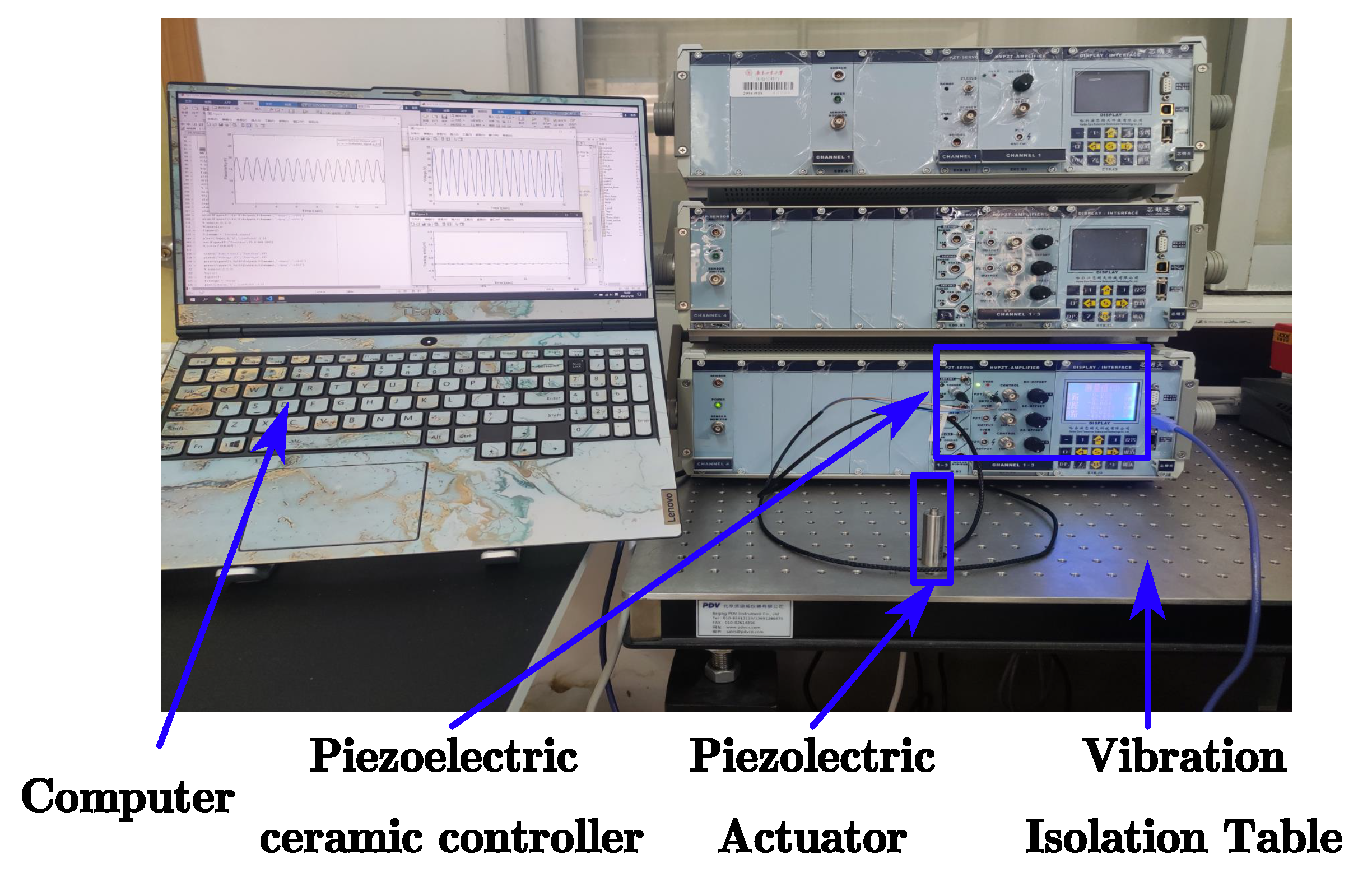
Figure 4.
The identification results of piezoelectric actuator. (a) The identified density function of the Preisach operator. (b) Matching degree of Preisach operator with identified density function to the experimental measurement of the hysteresis curve.
Figure 4.
The identification results of piezoelectric actuator. (a) The identified density function of the Preisach operator. (b) Matching degree of Preisach operator with identified density function to the experimental measurement of the hysteresis curve.
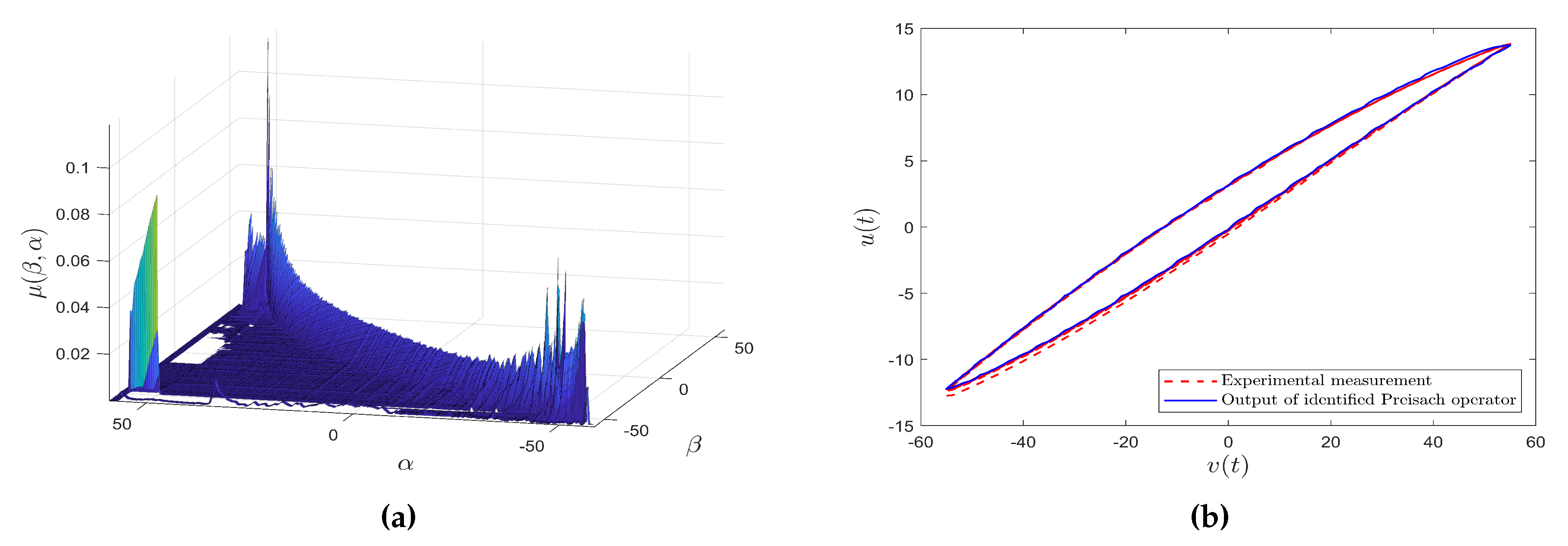
Figure 5.
System response with . (a) Tracking performance and versus time(s). (b) Tracking error versus time(s). (c) Control input and system input versus time(s). (d) Estimators and versus time(s).
Figure 5.
System response with . (a) Tracking performance and versus time(s). (b) Tracking error versus time(s). (c) Control input and system input versus time(s). (d) Estimators and versus time(s).
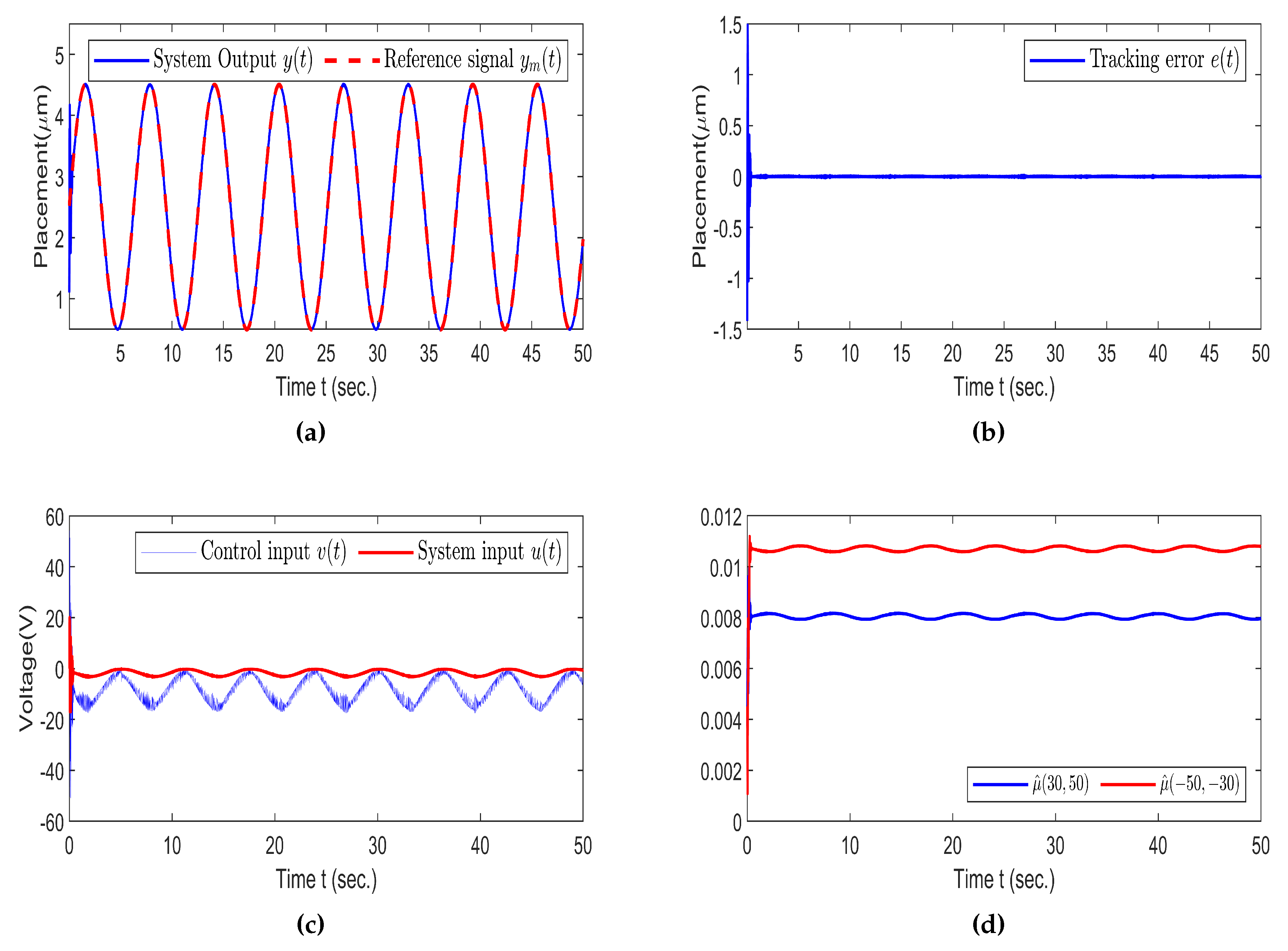
Figure 6.
Iterative algorithm performance.
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



