
Submitted:
28 July 2023
Posted:
01 August 2023
You are already at the latest version
Abstract
Near Earth Asteroids represent potential threats to human life because their trajectories may bring them in the proximity of the Earth. Monitoring these objects could help predict future impact events, but such efforts are hindered by the large numbers of objects that pass through the Earth’s vicinity. Additionally, there is also the problem of distinguishing asteroids from other objects in the night sky, which implies sifting through large sets of telescope image data. Within this context, we believe that employing machine learning techniques could greatly improve the detection process by sorting out the most likely asteroid candidates to be reviewed by human experts. At the moment, the use of machine learning techniques is still limited in the field of astronomy and the main goal of the present paper is to study the effectiveness of deep CNNs for the classification of astronomical objects, asteroids in this particular case, by comparing some of the well-known deep convolutional neural networks, including InceptionV3, Xception, InceptionResNetV2 and ResNet152V2. We have applied transfer learning and fine-tuning on these pre-existing deep convolutional networks and from the results that we have obtained one can see the potential of using deep convolutional neural networks in the process of asteroid classification. The InceptionV3 model has the best results in the asteroid class, meaning that by using it, we loose the least number of valid asteroids.
Keywords:
image classification
; astronomy
; asteroids
; convolutional neural network
; deep learning
1. Introduction
Near Earth Objects (NEOs) and especially Near Earth Asteroids (NEAs) can pose a clear threat to human life and property because of their proximity to the Earth. By predicting potential future impacts with our planet, decision makers could be informed of the danger, giving them time to start working on damage mitigation strategies. Improving the prediction chances requires the constant surveying of the nearby space around the Earth in order to continuously monitor for NEOs and NEAs and also to discover previously unknown objects. This requires the analysis of large data sets of telescope images, which can quickly add up during observation nights. After identifying potential asteroid candidates from the image data, the results are sent to human observers to review and confirm them. In this context, the timely and effective processing of the data is extremely important, as it provides the human observers with a steady stream of objects for review. However, it is also essential that the number of candidate objects does not overwhelm the human resources available. To this end, we have decided to employ machine learning techniques in an attempt to improve the object detection rate. Coupling artificial intelligence with the use of high-performance distributed processing infrastructures such as cloud-based solutions - which have seen wide-spread adoption as of late following the constant increase in computational and storage power - we think that we could maximize the benefits of having access to massive volumes of data in the field of astronomy.
This study is conducted within the scope of the CERES project [1] aiming at designing and implementing a software solution that is capable of classifying objects detected in astronomical images. The focus is on detecting/identifying asteroids. To accomplish this objective we rely on machine learning techniques to build up an asteroid classification model. It is very important to minimize the false negative results, meaning asteroids that are incorrectly classified. This model will be used in conjunction with another software tool, that detects valid asteroid trajectories. Therefore, even though the classification model produces some false positives, our trajectory validation tool should eliminate these detections, as they would not be part of valid trajectories. On the other hand, if the classification model generates false negatives, this means that we will miss these asteroids.
To accomplish the objective of building up an asteroid classification model, we need to create a dataset of asteroid images and train a model to be used for the classification of new objects. Figure 1 shows the conceptual description of the CERES project. The training of the asteroid classification model relies on the dataset of asteroid images and the output of the model will accomplish the inference that would be useful to other modules.
The main goal of the present paper is to review the effectiveness of deep CNNs at the task of classifying astronomical objects, specifically asteroids. We are going to present our findings by comparing the results obtained from some of the most well-known deep convolutional neural networks (CNNs), including InceptionV3, Xception, InceptionResNetV2 and ResNet152V2. These state-of-the-art classification CNNs are used to explore the suitable direction to this particular classification problem, either by full-training or by fine-tuning.
This paper is structured as follows: Section 2 presents some related works on the presented topic, while Section 3 presents some background notions on convolutional neural networks. The next sections describe the methodology used to assess various CNNs in the process of asteroid classification, while describing and discussing the experiments and the obtained results. The last section concludes the ideas presented within this paper.
2. Related Works
Machine learning is a technique that simulates the way humans learn, through examples, and is used to develop software applications capable of deducing information from input datasets by means of generalization. This ability of generalization is developed and continuously improved by performing repeated analysis of some examples, also called training data. After this analysis (or training) is conducted, the machine learning based applications can apply the learned generalization rules to infer results from new data sets, which were not used in the training phase. One of the most well-known and used machine learning techniques employs an abstract model that emulates the functioning of our brain, based on an attempt to simulate the interactions that take place between neurons. Although the representation model of a neuron is not new, being proposed more than half a century ago [2], the applicability of neural networks in solving real problems was limited due to the limited processing power of computers and, to a lesser extent, to the availability of datasets needed to train such models.
Typically, problems that can be solved by applying machine learning techniques are grouped into two major categories: supervised and unsupervised learning problems. In the case of the former, the data are already annotated with various labels. The unsupervised learning process is characterized by the lack of labels or other attributes that could help in the classification task. In this case, the learning algorithms must identify possible structures, groups or trends within the provided datasets. A supervised learning process should lead to the identification of some dependency relationships between the input dataset and a specified result. This relationship is obtained after feeding the system with a large number of examples and it can afterwards be used to predict the outcome for a new dataset.
Convolutional Neural Networks (CNN) are common methods in the image processing literature and could be applied for various fields. No-reference image quality assessment by exploiting convolutional neural networks and other deep learning techniques is presented in [3]. Transfer learning could be used with success in medical imaging [4,5].
In the field of astronomy, researchers are capturing various sets of images using different telescopes. Most of the time, the data are obtained after repeated sessions of observations of areas of the sky (fields), which can lead to the accumulation of large volumes of data that need to be analyzed in order to extract useful information [6]. To make effective use of such data, classification is one of the most widely seen applications of machine learning techniques. In this context, most classification use cases rely on neural networks with multiple hidden layers of neurons, also called deep networks. The use of such deep neural networks is made possible and accessible by the evolution of hardware [7] and of software capable of running such models effectively [8].
A good example that illustrates the kinds of problems that have to be solved due to the increasing amounts of data generated by telescopes (with high resolution and covering a large field of view) is the Galaxy Zoo project [9]. During this project’s life-cycle, the task of classifying 900,000 galaxy images was distributed to a group of volunteers. This is exactly the type of problem that can be simplified by migrating the repetitive task of classifying images from astronomers to computers running neural network classifiers. Such a solution is proposed by the authors of [10], demonstrating the feasibility of classifications done using a neural network trained on a dataset that was previously labeled by volunteers. Experimenting with various combinations of parameters, the results obtained using the proposed neural network reached a level of accuracy of 90% when compared to the classifications done by the humans volunteers.
The two major directions of research related to the identification of planets outside of the Solar System (exoplanets) and asteroids in the Solar System or near Earth are relevant examples of classification problems. In [11], the authors describe a method for detecting exoplanets based on multi-level neural networks. The model was trained using data from the Kepler space telescope to identify Earth-sized exoplanets by the transit method. This implies measuring the variation of a star’s light, variation that is a direct result of an exoplanet’s transit between the star and the observer. The paper highlights the challenges of identifying such small planets mainly due to the noise which, at that scale, is difficult to differentiate from the valid signals. This problem of identifying exoplanets when having low values for the signal-to-noise ratio is also addressed in [12,13,14], where the authors present the results of using convolutional neural networks to differentiate between valid signals and noise caused by other astronomical phenomena or instrument limitations.
Another interesting classification example in the field of astronomy is for the purpose of detecting potentially habitable exoplanets [15]. With the number of discovered exoplanets expected to reach the order of millions in a few years, the author presents some machine learning models that could be useful in identifying potential candidates similar to Earth. These models take into account the characteristics of the candidate planet and the star around which it orbits, one of the models even providing an index of similarity to our planet.
The authors of the paper [16] present a study on using different neural network architectures for star classification. The study includes models such as recurrent, dilated and temporal convolutional neural networks, LSTM (Long shortterm memory) memory cells and autoencoders. The results suggest the superiority of recurrent networks in terms of accuracy, while convolutional networks have the advantage when it comes to minimizing training time and memory usage.
The detection and classification of Near Earth Asteroids (NEA) is another area of interest in astronomy, especially given the danger that these objects pose, due to the damage they could cause in the event of an impact [17]. This is one of the main reasons for NASA’s involvement to identify, track and catalog NEAs, in order to make predictions on potential impact hazards [18].
In the literature, one can distinguish two main directions of research related to the detection and classification of NEAs: analysis and classification based on the trajectory attributes of asteroids and their detection from images obtained by recurrent observations. The authors of [19] describe a solution to use machine learning techniques to predict the orbital parameters of asteroids. The proposed method is based on an SVM (Support Vector Machine) algorithm to identify potentially dangerous subgroups of asteroids that are found in major NEAs groups. The authors of [20] present the results of using a neural network to identify asteroids that can present an impact risk. As a training dataset, the solution uses simulated trajectories that are obtained by the inverse integration in time of some objects launched from the Earth’s surface. The results presented indicate an identification rate of up to 90% of all the objects that present an impact risk.
Identifying NEAs from sets of images obtained from telescopes is the main method of discovering new asteroids. After the initial discovery, the asteroids are confirmed and tracked periodically, while their orbits are being modelled. All this data is stored in an international database, the Minor Planet Center [21]. Starting from this data, different studies can be performed on the existing NEA populations and the risk of impact that they present. NEOWISE [22], Catalina Sky Survey [23], ATLAS [24] and LINEAR [25] are projects dedicated to identifying new asteroids. The data produced by these projects are far beyond the processing capabilities of human observers. In [26] the authors present a machine learning solution utilised to classify the detected objects from NEOWISE images. The experiments used the Python library sklearn to define models and datasets validated by astronomers for training. In that dataset, the classes distinguish between asteroids and other identifiable objects, such as galaxies, cosmic rays or instrument artifacts. Similar solutions, based on the use of convolutional neural networks to identify asteroids are presented in [27,28,29].
The authors of [30] present their achievements in creating a real-time NEA discovery pipeline that uses a machine-learning classifier to filter a large number of false-positive streak detections. It offers to the human scanner an effective and remote solution able to identify real asteroid streaks during the night. The machine-learning classifier is based on a supervised ensemble-method approach for classification, namely Random Forest. Another approach based on machine learning to detect moving objects is presented in [31]. Here, the features used for building the model are photometry measurements, position measurements and shape moments.
The Near-Earth Asteroid Tracking (NEAT) program was a pioneer in implementing a fully automated system for detecting asteroids. This included controlling the telescope, acquiring wide-field images and detecting NEOs using onsite computing power provided by a Sun Sparc 20 and a Sun Enterprise 450 computer [32]. One approach that maintains high effectiveness while producing low false-detection rates, involves using two independent detection algorithms and combining the results, reducing the operator time associated with searching huge datasets. This solution is described by Petit et al. [33], their efforts having resulted in the creation of a highly automated software package for the detection of moving objects.
3. Background on CNNS
3.1. Deep convolutional neural networks
The architectural design of Convolutional Neural networks (CNN) is based on multiple interconnected layers, where different features (low, intermediate or high) are sequentially extracted. The main building blocks of every CNN are the convolution and pooling layers, followed by some fully connected layers, the final layer being typically based on the softmax function. Features are learned by the convolution and pooling layers, whereas fully connected layers and softmax functions are responsible for the final classification. Based on some filtering functions, the convolutional layers will extract various spatial features from the images. In the case of asteroid classification, these features define the typical geometrical representation of an asteroid and the patterns that are specific to asteroids. This feature extraction method is performed hierarchically, meaning that the first convolutional layers will learn low level features, such as edges or corners, while the last layers will extract high level features.
At its most basic level, a convolution is a simple mathematical operation having as inputs the image matrix and a particular filter. The convoluted features are obtained by sliding a fixed-size window over the input data matrix and applying some filter. The stride will specify the shift in the pixels of the sliding window. One of the most widely used activation functions in this type of approach is the Rectified Linear Unit (ReLU). Even though it is a simple function, linear for positive values and zero for negative values, it yields good results in various applications of CNNs. Being cheap to compute, it will not have a great impact on the training time, which could increase with the size of the dataset. Pooling layers are often defined after each convolutional layer and they will reduce the dimensionality by sub-sampling or down-sampling. At the same time, the relevant information (features) are retained. Such a layer is based on simple mathematical operations, like maximum or average. The operations are performed in a manner similar to the convolutional layers, based on a sliding window. The difference comes from the stride value, which are higher than 1, so that the result is a down-sample of the feature map. By reducing the dimensionality of the feature maps, the computational requirements are also reduced.
Between the classification layer and the convolutional/pooling layers, some CNNs could have fully connected layers. Having such layers could lead to overfitting. This can be mitigated by using dropout layers. By randomly dropping some neurons and their associated connections, we prevent the development of co-dependency between neurons during the training phase. The classification layer, the last one in the architecture, typically the softmax, will convert the output of the CNN into a set of probabilities, which add up to 1. This output represents the probability of the input being a member of a particular class.
3.2. Transfer learning
By using a well-known deep CNN, we rely on a pre-trained model that contains all the weights representing the features identified on the dataset used to train this model. In this study, we seek to determine whether these learned features are transferable to a different dataset - namely to astronomical images. The other objective of this study is to identify the most suitable deep CNN to be used in the process of asteroid classification.
Transfer learning is a method in which we are reusing features learned on a given problem to solve a new one. It is usually done when our dataset has too little data and we transfer the knowledge gained by training on a large dataset. A typical transfer learning workflow consists on the following steps:
- Start from the layers of the previously trained model;
- Freeze their weights in order to maintain what the model learned during training on a large dataset;
- Add new layers on top of the previously trained model but make them trainable;
- Train the new model, basically the newly added layers;
Our dataset of asteroid/non-asteroid detections is relatively small when compared to other datasets (such as ImageNet). With this in mind, a fine-tuning using such a pre-trained CNN seems to be the right approach. Fine-tunning means making adjustments within the top layers of the CNN, while freezing the bottom layers that are responsible with low-level features (such as edges or corners). During the training phase, the weights of the layers that were previously frozen are not updated. By using this approach, we retain some of the weights of the pre-trained model on a particular dataset and at the same time we are making some adjustments in order to accommodate the new dataset. The top layers are responsible with identifying generic features, while the bottom layers are responsible with identifying specific features of the studied dataset. If we were to conduct fine-tunning on all of the layers, it could lead to an overfitting situation.
Full training is more suitable if the new dataset is large enough to allow the model to converge. Obviously, the computational cost of this approach is much higher than that of the the fine-tunning approach. Often, in the case of full training, we could get into an overfitting situation, and in order to mitigate this we would add some dropout layers or try to augment the data. Having a small dataset would not help the model to properly generalize. We could rely on data augmentation to increase the dataset size. The data augmentation would consist of some transformations, including translation, rotation and reflection. These would help to increase the size of the dataset. For our particular dataset (binary set), the data augmentation is not a good idea because it would increase the number of images that are labeled as non-asteroids but have the same particularities as asteroids.
4. Methodology
In this study we start by using four state-of-the-art CNNs to classify asteroids in astronomical images. Figure 2 highlights the main building blocks of the classification model. We added some more layers to the base layers of the used CNNs. In this section, we present the four CNNs on which we tested the asteroid classification use-case. These are InceptionResNetV2, InceptionV3, Xception and ResNet152V2 and they where chosen based on their already confirmed performance in classification use-cases. We start by briefly describing them and highlighting the changes that we have made on these models.
In order to avoid overfitting, we used the early stopping method. Throughout training, the model is evaluated on the validation dataset at the end of each epoch. We stop the training process if the performance of the model on the validation dataset starts to degrade. This means that the validation dataset loss starts to increase or the validation dataset accuracy starts to decrease. Such a model should have a good generalization performance.
4.1. InceptionResNetV2
This CNN network integrates two well established deep CNNs, ResNet and Inception, both having good performance and maintaining a low computational cost. Instead of the filter concatenation stage, this model includes residual connections into the Inception architecture. This allows for an increase in the number of inception blocks, and obviously in the network depth, but without compromising the computational cost. The architecture consists of 164 layers [34]. The architecture is built on a foundation of Residual connections and Inception structures. Multiple convolutional filters of various sizes are mixed with residual connections in the Inception-Resnet block. Images with three channels and a resolution of 299x299 serve as the model’s input data. The architecture starts with a few layers of convolutions that will increase the number of channels while decreasing the spatial dimension. The training duration is shortened by using residual connections in the subsequent blocks of Inception-Resnet and Reduction, which learn the features. Average pooling, drop-out, and soft-max are the last layers.
4.2. InceptionV3
GoogLeNet is one of the first nonsequential CNNs. By increasing the depth and width of a deep CNN model, we can improve the performance, but at the cost of also increasing the number of parameters. Having many parameters would impact the computational cost. To tackle this problem, the Inception module [35] was introduced in GoogLeNet. This module is based on 1x1, 3x3 and 5x5 convolutions followed by a filter concatenation. This solution would reduce the number of training parameters and that, in turn, would further reduce the computational complexity.
4.3. Xception
The Xception architecture is built up as a linear stack of depth-wise separable convolution layers with residual connections. The 36 convolutional layers act as a feature extraction base for this network. There are 14 modules made up of the 36 convolutional layers. With the exception of the first and last modules, all modules have explicit linear residual connections. Entry flow, middle flow, and exit flow are the three sections of the Xception architecture. The entry flow is the initial step the data takes before moving through the middle flow. It consists of several Convolution and SeparableConvolution layers. The middle flow which is repeated eight times is composed of SeparableConvolution layers. Lastly the exit flow concludes this architecture [36].
4.4. ResNet152V2
Within the ResNet [37] family, we find multiple deep neural networks that share a similar architecture, the difference being in the depth of the model. ResNet is based on residual learning units, with the objective of reducing the degradation of deep neural networks. This category of CNNs are preferable because they typically produce good classification accuracy without increasing the model complexity too much.
4.5. Changes to CNNs
The input for all the studied CNNs requires 3 image bands. Our images consists of only one band. We have modified the dataset, transforming it to 3 channels by simply replicating the existing channel. In addition, the input resolution should be higher than the resolution of the images in our dataset. For InceptionV3, the resolution is (299, 299, 3) with a minimum of (75, 75, 3). For Xception, it is (299, 299, 3) with a minimum of (71, 71, 3). For InceptionResNetV2, it is (299, 299, 3) with a minimum of (75, 75, 3). Finally, for ResNet152V2, the resolution is (224, 224, 3) with a minimum of (32, 32, 3). We have scaled up all the images to the minimum resolution required for each CNN.
The flatten layer (see Figure 2) was added to transform the multidimensional output received as an input from the previous layers (coming from InceptionV3, Xception, etc.) into a unidimensional data set. In our case, this layer would transform the feature maps computed by the previous convolution and pooling layers into the data needed by the Dense layer that would follow. The dense layer performs the actual classification of the input data by training a set of parameters using a back-propagation mechanism. To reduce the overfitting that could arise, we have added a dropout layer that would randomly ignore some neurons during training in the forward and back-propagation mechanisms. In this manner, we have tried to minimize the development of dependencies between neurons during the training phase. The last layer, also a Dense layer, is based on softmax and it would generate the probability of membership for each of the two classes, asteroids and non-asteroids.
4.6. Evaluation Metrics
Accuracy is widely used with deep CNNs to measure training performance due to its simplicity and relevance in the case of the majority of algorithms. One drawback when using accuracy to compare results from different models is that it is heavily affected by class imbalance. For our particular dataset, this could be an issue based on the fact that the dataset is imbalanced. In it, we have more non-asteroid detections than asteroid detections. For this reason, we do not rely only on accuracy as our main metric.
In the context of our experiments, true positives refer to asteroid objects that are correctly classified. True negatives represent non-asteroid objects that are correctly classified. False positives mean non-asteroid objects that are incorrectly classified. Finally, false negatives mean asteroid objects that are incorrectly classified.
One tool that we use to assess the system’s performance is the confusion matrix. In a binary classification problem, this is a 2x2 matrix, where the rows specify the actual input class and the columns specify the predictions of the system. We are more interested in maximizing the number of true positive values rather than maximizing that of true negatives.
Precision is therefore computed as the number of true positives (asteroid objects correctly identified) divided by the sum of true positives and false positives (non-asteroid objects marked incorrectly as asteroid objects). To compute the precision, we take into account just the true positives and the false positives. We exclude the false negatives, which are actually asteroid objects but marked incorrectly by the system. In this way, we would get high precision if our system had a low number of false positives (meaning that it would correctly classify non-asteroid objects) without taking into consideration the fact that the system misses some asteroid objects. Even though precision is useful, it still misses some important information. It does not incorporate information on how many real positive class examples were predicted to belong to the wrong class. For this reason we are not relaying on precision when assessing the system performance.
Recall takes into consideration the false negatives and is computed as the number of true positives divided by the sum of true positives and false negatives (asteroid objects marked incorrectly by the system as non-asteroid objects). For this reason, we rely on recall to assess the system performance based on the fact that we want to minimize the number of asteroid objects that are incorrectly classified.
Precision highlights the correct positive predictions out of all the positive predictions, while recall highlights the missed positive predictions. Based on this, recall focuses more on the coverage of the positive class.
The F1 score combines the accuracy and recall metrics into one metric. The F1 score has also been developed to perform effectively on data that is unbalanced. If Precision and Recall are both high, a model will have a high F1 score. If Precision and Recall are both low, a model will receive a low F1 score.
5. Experimental results
5.1. Processing flow
The results presented in this paper are part of the CERES software module for asteroids detection from astronomical images. It is composed of 3 modules (see Figure 3): one module for creating the image dataset that is used for training a classification model, one module for classifying objects detected from astronomical images for the purpose of identifying asteroids, and the inference module that is integrated into the NEARBY platform.
5.2. Dataset
The dataset on which we have trained the asteroid classification model is a binary one, having just two classes: one for valid asteroids (some examples are in Figure 4), and another one for objects that were identified in the input astronomical images but which are not asteroids (some examples are in Figure 5).
In the NEARBY project [41] we have developed an effective software platform, that achieves very fast data reduction of astronomical images. This is quite useful for rapid detection and validation of asteroids. It also offers the option for visual analysis of the processed images and human validation of the moving sources (asteroids), assisted by static and dynamical presentations. The processing and detection are performed over a high-performance computing solution based on a cloud infrastructure. Astronomical images represent the input data for this software platform. Such images are captured using mosaic cameras (containing an array of CCDs (ChargedCoupled Device)) and represent the raw input data for every asteroid detection algorithm. However, before being actually useful, we need to transform and modify them. This process is known as image reduction, and it removes instrumental signatures, masks cosmic rays and applies photometric and astrometric calibration operations. Next, we need to identify real objects in the astronomical images and try to group them across several images in order to identify an asteroid trajectory.
SExtractor [42] was used to build up a catalogue of objects from astronomical images. The asteroid detection algorithm (CrossObject) that was developed in the NEARBY project relies on the objects extracted from astronomical images by the SExtractor library. As the performed analysis is based solely on the images, without any knowledge of the context, some of the identified objects are erroneous (generally noise) and favor the detection of false positives (incorrectly detected asteroids). Due to this, some of these detections would be interpreted as valid trajectories by the asteroid detection algorithm. This type of errors could be relatively easily avoided if we added one more layer between the object extraction phase and the asteroid detection algorithm. The development of this layer, based on machine learning techniques, is being conducted as part of the CERES project [1].
One of the major challenges in successfully applying machine learning techniques within any use-case, is the availability of valid training data. In our scenario, the required dataset was built by relying on detections that were already classified and validated by human experts. The input data for the CERES software module comes in the FITS format (Flexible Image Transport System), which is an open standard used to describe a digital file format useful for the storage, transmission and processing of data. Typically, the images contain an implicit Cartesian coordinate system that describes the location of each pixel. However, astronomic images are enhanced with a world coordinate system such as the Celestial coordinate system. In order to build the dataset, the already classified detections were cropped from each astronomical image in which they were reported. The archive of astronomical images to which we have had access from our previous work consists of several surveys, and for each survey we had at least 3 or 4 images with the same telescope orientation (pointing), meaning that each detected asteroid is present in at least 3 or 4 images. Each of these cropped images will be part of the new dataset of asteroids images.
The dataset is originally saved in the FITS format, which allows for the specification of pixel values outside of the range of [0, 255]. The pixel data actually indicates light intensity. It is challenging for neural networks to learn because of this wide range of values. We will normalize this data to tackle this issue, and the images that result will have pixels with values between [0, 1]. We could use data augmentation to increase the dataset. This method is applied in machine learning when the neural network only has a little quantity of data to work with. The goal of augmentation is to provide the network with extra data for training purposes. To obtain additional information, we may flip each image vertically or horizontally, rotate the images clockwise or counterclockwise, or apply filters. These methods can contribute in the spread of errors if the initial dataset is not sufficiently varied.
Table 1 presents the distribution of asteroids/non-asteroids in the 3 datasets that we have employed: training set, validation set and test set. The distribution of images in the two classes is not uniform, with the non-asteroid class having more images than the asteroid class. We used class weights to aid the model’s learning from the unbalanced data.
Although the images initially had a dimension of 32x32 pixels, after adding the two additional channels and applying a scale-up, they became too large to be stored directly into the system memory. To tackle this problem, we have implemented a batch reading component in order to be able to read them from the disk in preparation for the training phase.
5.3. Experiments description
During this study, we have performed three experiments, as described below.
Experiment 1:
- a)
- start from the weights calculated using the ImageNet dataset;
- b)
- remove the top layer and add some additional layers;
- b)
- train the new model.
Experiment 2:
- a)
- start from the weights calculated using the ImageNet dataset;
- b)
- remove the top layer, select a different bottleneck layer and add some additional layers;
- c)
- train the new model.
Experiment 3:
- a)
- start from the weights calculated using the ImageNet dataset;
- b)
- remove the top layer, select a different bottleneck layer and add some additional layers;
- c)
- unfreeze some of the base model layers and train the new model.
5.4. InceptionV3
The first experiment is based on the InceptionV3 model. The results are presented in Table 2 and Table 3. We started off by using the ImageNet pre-trained weights. We excluded the fully connected layers from the top of the model. The input should have 3 channels and at least 75x75 pixels. The default resolution for the input is 299x299. Our dataset consists of images with a lower resolution, just 32x32 pixels, so in order to accommodate them we had to scale-up all the images. We have added some more layers to this model, a flatten layer, a dense layer, a dropout layer and the final layer based on the softmax activation function. The accuracy of the model is 0.87 and the loss is 0.34. This means that, without making any adjustments on the model, we get a decent performance. Looking at the recall metric, we see that it is similar for both classes. For the asteroid class, we see that the model misses quite a lot of valid detections. This suggests that the model is not very good and that we need to make some adjustments.
Next we added our new layers to the output of the mixed_2 layer of the InceptionV3 model. The accuracy of this model increased to 0.92, while the loss decreased to 0.21. This improvement in performance is due to the fact that we use as a bottleneck a layer that has a higher dimensionality. This means that we have much more features than would have been useful to the model to learn from. Also worth mentioning is that, in this model, the base layers are frozen and we have only trained the new layers that were added.
The last experiment using this model involved the unfreezing of some of the base model (from InceptionV3) and training those layers together with the layers that were added to the model. We unfroze starting from different layers (mixed_0 and mixed_1), but the results were approximately the same. We got an accuracy of 0.92 and a loss of 0.22. Even though the recall for non-asteroid objects dropped by some percentage, the recall for asteroid objects increased. This is the best result for this model (InceptionV3), since we are missing only 112 valid detections from a total of 233
5.5. Xception
We started by using the ImageNet pre-trained weights. We have excluded the fully connected layers from the top of the model. The input should have 3 channels and at least 71x71 pixels, smaller than in the Inception scenario. The default resolution for the input is 299x299. We had to scale down all the images to a 71x71 pixel resolution. The results are presented in Table 4 and Table 5. The accuracy of this model (off the shelf, no fine-tuning) was 0.86 and the loss was 0.37. These values are very similar to the ones obtained using InceptionV3. In this situation, we got a relatively high precision for non-asteroid objects, when compared to the precision of the other class. The important aspect are the recall values, which are also very similar to InceptionV3. The model wrongly identified a lot of asteroid objects, so we needed to make some improvements in order to increase the recall.
By selecting as bottleneck layer add_1 we got an increase in accuracy and a decrease in loss. The new values are 0.90 for accuracy and 0.28 for loss. The precision increases for both classes and we can observe that the recall increases much more on the asteroid objects class than on non-asteroid objects class. With a recall of 94%, this proves to be a good model. We have missed only 144 valid detections out of a total of 2331.
If we unfreeze some of the bottom layers and keep the bottleneck layer to be add_1, we would succeed in decreasing the loss down to 0.27, whereas the accuracy would remain the same, at 0.90. There is also a small improvement in the recall rate, up to 0.95, meaning that we now only miss 123 valid detections out of 2331. For the Xception model, this is the best result that we have achieved.
5.6. InceptionResNetV2
Like in the case of previous models, we have also started from ImageNet pre-trained weights. The default resolution for the input is 299x299, with at least 75x75 and 3 input channels. The results are presented in Table 6 and Table 7. Without any modifications on the model, we get a lower loss (just 0.48) compared with the previous models, and an accuracy of 0.84. The precision for the non-asteroid class is just 0.9, versus 0.7 for the asteroid class. We have missed a lot of valid detections (588 out of 2331), but we have had decent predictions for the non-asteroid class.
The next experiment involved selecting block35_10_mixed as the bottleneck layer. We got an increase in accuracy (up to 0.92) and a decrease in loss (down to 0.23). The recall values for asteroid objects has increased, but was still lower than the recall for the non-asteroid class (0.91 compared to 0.93). This model missed 218 out of a total of 2331 valid detections.
By unfreezing layers starting from mixed_5b and running the training on all of these layers, the loss has decreased to 0.2, while the accuracy remained the same, at 0.92. The percentages of recall are the same as for the previous model, but looking at the actual numbers, we can see that we have correctly predicted 10 more valid detections.
5.7. ResNet152V2
The results are presented in Table 8 and Table 9. For ResNet152V2 we got the worst result by starting from the pre-trained weights. In this situation, the accuracy was just 0.82, with a relatively high loss of 0.48. The precision for the asteroid objects class is pretty low, just 0.63 with a recall of 0.83. A lot of valid detection would be missed if we were to employ this model.
We managed to get a decent improvement by selecting conv3_block8_1_relu as the bottleneck layer. Here, the precision rose to 0.91, while the loss dropped to 0.24. The recall values for both classes are around 0.9. We have actually gained twice the number of valid detections.
For the previous models, if we unfroze some of the layers we would get some gain in performance. Here, we have opted to unfreeze starting with the conv2_block3_2_conv layer. The accuracy in this situation remained the same, but we got a drop in loss (down to 0.21 from 0.24). The downside was that the number of false negatives increased, meaning that we lost some of the valid detections.
6. Discussion
In the experiments presented within this paper, we have applied transfer learning and fine-tuning on pre-existing, well known, deep convolutional netwoks, all of them being pretrained using the ImageNet dataset. Figure 6 presents by comparison the confusion matrices for each of the experiments performed on each CNN based architectures. The best results, in terms of recall for the asteroid class, were obtained using InceptionV3 by fine-tuning some of the parameters. We have obtained a recall of 0.95 in this scenario. InceptionResNetV2 has the lower recall due to simply performing transfer learning without training some of the base model layers. The performance of the Xception model is similar to that of the InceptionV3 model.
Our dataset is very different from the ImageNet dataset that was used for pre-training all of the studied models. ImageNet does not contain these classes. Another difference comes from the fact that the ImageNet dataset has red, green and blue bands, instead of just one band as in our dataset. For this reason, we had to increase the dimensionality of the dataset by duplicating the existing channel. Due to the small dimensions of an asteroid in an astronomical image, the initial resolution of the images in the dataset was quite low (32x32) compared to the values needed for the CNNs models. For this reason, we had to scale-up all the images. This scaling operation could also influence the obtained results.
However, from the results that we have obtained, one can see the potential of using deep convolutional neural networks in the process of asteroid classification. Coupled with other techniques an technologies, like distributed computing, they could help in greatly reducing the amount of data that human experts have to sift through in order to find valid asteroids.
7. Conclusions
The main goal of the present paper is to assess the effectiveness of employing deep CNNs for classifying astronomical objects. In our case, the problem was that of a binary classification, relegating the identified objects to one of two possible classes: asteroids and non-asteroids. We have compared some of the most well-known deep CNNs, including InceptionV3, Xception, InceptionResNetV2 and ResNet152V2. The results of this study highlight the fact that the high level features learned by deep neural networks are effective for the classification of asteroids. The InceptionV3 model has the best results in the asteroid class, meaning that by using it, we lose the least number of valid asteroids. Overall, we are of the opinion that the results obtained and documented herein demonstrate the potential of employing deep CNNs in solving the problem of classifying astronomical objects.
Author Contributions
V.B.: Conceptualization, Methodology, Software, Validation, Writing. C.N.: Software, Validation, Writing. A.S.: Software, Validation, Writing. T.S.: Software, Validation, Writing. D.G.: Conceptualization, Methodology, Validation. All authors have read and agreed to the published version of the manuscript.
Data Availability Statement
Not applicable.
Acknowledgments
This work was supported by a grant of the Romanian Ministry of Education and Research, CCCDI - UEFISCDI, project number PN-III-P2-2.1-PED-2019-0796, within PNCDI III. (the development of the dataset and CNN models). This research has been supported by the CLOUDUT Project, cofunded by the European Fund of Regional Development through the Competitiveness Operational Programme 2014- 2020, contract no. 235/2020. (the Cloud infrastructure that was used in order to train the CNN models). The data used to train and test the model developed as part of this research effort was made available by observations done with the Isaac Newton Telescope (INT), operated on the island of La Palma by the Isaac Newton Group (ING) in the Spanish Observatorio del Roque de los Muchachos (ORM) of the Instituto de Astrofisica de Canarias (IAC). The work was also supported by the project “Entrepreneurial competencies and excellence research in doctoral and postdoctoral programs—ANTREDOC”, project co-funded by the European Social Fund, financing agreement no. 56437/24.07.2019.
Conflicts of Interest
The authors declare no conflict of interest.
References
- CERES Project Website, http://cgis.utcluj.ro/ceres/.
- Rosenblatt, F. The perceptron: a probabilistic model for information storage and organization in the brain. Psychological review 1958, 65 6, 386–408.
- Varga, D. No-Reference Image Quality Assessment with Convolutional Neural Networks and Decision Fusion. Applied Sciences 2022, 12. [CrossRef]
- Pardamean, B.; Cenggoro, T.W.; Rahutomo, R.; Budiarto, A.; Karuppiah, E.K. Transfer Learning from Chest X-Ray Pre-trained Convolutional Neural Network for Learning Mammogram Data. Procedia Computer Science 2018, 135, 400–407. The 3rd International Conference on Computer Science and Computational Intelligence (ICCSCI 2018) : Empowering Smart Technology in Digital Era for a Better Life. [CrossRef]
- Badža, M.M.; Barjaktarović, M. Classification of Brain Tumors from MRI Images Using a Convolutional Neural Network. Applied Sciences 2020, 10. [CrossRef]
- Gorgan, D.; Vaduvescu, O.; Stefanut, T.; Bacu, V.; Sabou, A.; Balazs, D.C.; Nandra, C.I.; Boldea, C.; Boldea, A.L.; Predatu, M.; et al. NEARBY Platform for Automatic Asteroids Detection and EURONEAR Surveys. ArXiv 2019, abs/1903.03479.
- Sharma, R.; M, V.; Moharir, M. Revolutionizing machine learning algorithms using GPUs 2016. pp. 318–323. [CrossRef]
- Alam, M.; Samad, M.; Vidyaratne, L.; Glandon, A.; Iftekharuddin, K. Survey on Deep Neural Networks in Speech and Vision Systems. Neurocomputing 2020, 417. [CrossRef]
- Raddick, M.J.; Bracey, G.; Gay, P.L.; Lintott, C.J.; Murray, P.; Schawinski, K.; Szalay, A.S.; Vandenberg, J. Galaxy Zoo: Exploring the Motivations of Citizen Science Volunteers. Astronomy Education Review 2010, 9. [CrossRef]
- Banerji, M.; Lahav, O.; Lintott, C.J.; Abdalla, F.B.; Schawinski, K.; Bamford, S.P.; Andreescu, D.; Murray, P.; Raddick, M.J.; Slosar, A.; et al. Galaxy Zoo: reproducing galaxy morphologies via machine learning. Monthly Notices of the Royal Astronomical Society 2010, 406, 342–353. [CrossRef]
- Pearson, K.A.; Palafox, L.; Griffith, C.A. Searching for exoplanets using artificial intelligence. Monthly Notices of the Royal Astronomical Society 2017, 474, 478–491. [CrossRef]
- Shallue, C.J.; Vanderburg, A. Identifying Exoplanets with Deep Learning: A Five-planet Resonant Chain around Kepler-80 and an Eighth Planet around Kepler-90. The Astronomical Journal 2018, 155, 94. [CrossRef]
- Ansdell, M.; Ioannou, Y.; Osborn, H.P.; Sasdelli, M.; Smith, J.C.; Caldwell, D.; Jenkins, J.M.; Räissi, C.; Angerhausen, D.; et al.. Scientific Domain Knowledge Improves Exoplanet Transit Classification with Deep Learning. The Astrophysical Journal 2018, 869, L7. [CrossRef]
- Chaushev, A.; Raynard, L.; Goad, M.R.; Eigmüller, P.; Armstrong, D.J.; Briegal, J.T.; Burleigh, M.R.; Casewell, S.L.; Gill, S.; Jenkins, J.S.; et al. Classifying exoplanet candidates with convolutional neural networks: application to the Next Generation Transit Survey. Monthly Notices of the Royal Astronomical Society 2019, 488, 5232–5250. [CrossRef]
- Hora, K. Classifying Exoplanets as Potentially Habitable Using Machine Learning. In Proceedings of the ICT Based Innovations; Saini, A.K.; Nayak, A.K.; Vyas, R.K., Eds.; Springer Singapore: Singapore, 2018; pp. 203–212.
- Jamal, S.; Bloom, J.S. On Neural Architectures for Astronomical Time-series Classification with Application to Variable Stars. The Astrophysical Journal Supplement Series 2020, 250, 30. [CrossRef]
- Popova, O.P.; Jenniskens, P.; Emel’yanenko, V.; Kartashova, A.; Biryukov, E.; Khaibrakhmanov, S.; Shuvalov, V.; Rybnov, Y.; Dudorov, A.; Grokhovsky, V.I.; et al. Chelyabinsk Airburst, Damage Assessment, Meteorite Recovery, and Characterization. Science 2013, 342, 1069–1073, [https://science.sciencemag.org/content/342/6162/1069.full.pdf]. [CrossRef]
- NASA, „Near-Earth Object Observation Program,” 2020. https://www.nasa.gov/planetarydefense/neoo.
- Pasko, V. Prediction of Orbital Parameters for Undiscovered Potentially Hazardous Asteroids Using Machine Learning. Astrophysics and Space Science Proceedings 2018, pp. 45–65. [CrossRef]
- Hefele, J.D.; Bortolussi, F.; Zwart, S.P. Identifying Earth-impacting asteroids using an artificial neural network. Astronomy and Astrophysics 2020, 634, A45. [CrossRef]
- The International Astronomical Union, „Minor Planet Center,” 2020. https://www.minorplanetcenter.net/iau/mpc.html.
- California Institute of Technology, „The NEOWISE Project,” 2020. https://neowise.ipac.caltech.edu/.
- The University of Arizona, „Catalina Sky Survey,” 2020. https://catalina.lpl.arizona.edu/.
- The ATLAS Project, „ATLAS,” 2020. https://fallingstar.com/home.php.
- MIT Lincoln Laboratory, „Lincoln Near-Earth Asteroid Research,” 2020. https://www.ll.mit.edu/impact/watch-potentially-hazardous-asteroids.
- Nugent, C.R.; Dailey, J.; Cutri, R.M.; Masci, F.J.; Mainzer, A.K. Machine learning and next-generation asteroid surveys. In Proceedings of the AAS/Division for Planetary Sciences Meeting Abstracts #49, 2017, Vol. 49, AAS/Division for Planetary Sciences Meeting Abstracts, p. 103.03.
- Lieu, M.; Conversi, L.; Altieri, B.; Carry, B. Detecting Solar system objects with convolutional neural networks. Monthly Notices of the Royal Astronomical Society 2019, 485, 5831–5842. [CrossRef]
- Galindo, Y.; Lorena, A. Deep Transfer Learning for Meteor Detection. 2018, pp. 528–537. [CrossRef]
- Varela, L.; Boucheron, L.; Malone, N.; Spurlock, N. Streak detection in wide field of view images using Convolutional Neural Networks (CNNs). In Proceedings of the Advanced Maui Optical and Space Surveillance Technologies Conference; Ryan, S., Ed., 2019, p. 89.
- Waszczak, A.; Prince, T.A.; Laher, R.; Masci, F.; Bue, B.; Rebbapragada, U.; Barlow, T.; Surace, J.; Helou, G.; Kulkarni, S. Small Near-Earth Asteroids in the Palomar Transient Factory Survey: A Real-Time Streak-detection System. Publications of the Astronomical Society of the Pacific 2017, 129, 034402. [CrossRef]
- Lin, H.W.; Chen, Y.T.; Wang, J.H.; Wang, S.Y.; Yoshida, F.; Ip, W.H.; Miyazaki, S.; Terai, T. Machine-learning-based real–bogus system for the HSC-SSP moving object detection pipeline. Publications of the Astronomical Society of Japan 2017, 70. [CrossRef]
- Pravdo, S.; Rabinowitz, D.; Helin, E.; Lawrence, K.; Bambery, R.; Clark, C.; Groom, S.; Levin, S.; Lorre, J.; Shaklan, S.; et al. The Near-Earth Asteroid Tracking (NEAT) Program: An Automated System for Telescope Control, Wide-Field Imaging, and Object Detection. The Astronomical Journal 2007, 117, 1616. [CrossRef]
- Petit, J.M.; Holman, M.; Scholl, H.; Kavelaars, J.; Gladman, B. A highly automated moving object detection package. Monthly Notices of the Royal Astronomical Society 2004, 347. [CrossRef]
- Szegedy, C.; Ioffe, S.; Vanhoucke, V.; Alemi, A. Inception-v4, Inception-ResNet and the Impact of Residual Connections on Learning. AAAI Conference on Artificial Intelligence 2016, 31. [CrossRef]
- Szegedy, C.; Vanhoucke, V.; Ioffe, S.; Shlens, J.; Wojna, Z. Rethinking the Inception Architecture for Computer Vision. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2016, pp. 2818–2826. [CrossRef]
- Chollet, F. Xception: Deep Learning with Depthwise Separable Convolutions. 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR) 2017, pp. 1800–1807.
- He, K.; Zhang, X.; Ren, S.; Sun, J. Identity Mappings in Deep Residual Networks. In Proceedings of the Computer Vision – ECCV 2016; Leibe, B.; Matas, J.; Sebe, N.; Welling, M., Eds.; Springer International Publishing: Cham, 2016; pp. 630–645.
- Chollet, F.; et al. Keras. https://keras.io, 2015.
- Abadi, M.; Agarwal, A.; Barham, P.; Brevdo, E.; Chen, Z.; Citro, C.; Corrado, G.S.; Davis, A.; Dean, J.; Devin, M.; et al. TensorFlow: Large-Scale Machine Learning on Heterogeneous Systems, 2015. Software available from tensorflow.org.
- ; Price-Whelan, A.M.; Lim, P.L.; Earl, N.; Starkman, N.; Bradley, L.; Shupe, D.L.; Patil, A.A.; Corrales, L.; Brasseur, C.E.; et al. The Astropy Project: Sustaining and Growing a Community-oriented Open-source Project and the Latest Major Release (v5.0) of the Core Package. 2022, arXiv:astro-ph.IM/2206.14220]935, 167. [CrossRef]
- Bacu, V.; Sabou, A.; Stefanut, T.; Gorgan., D.; Vaduvescu, O. NEARBY Platform for Detecting Asteroids in Astronomical Images Using Cloud-based Containerized Applications. In Proceedings of the 2018 IEEE 14th International Conference on Intelligent Computer Communication and Processing (ICCP), 2018, pp. 371–376. [CrossRef]
- Bertin, E.; Arnouts, S. SExtractor: Software for source extraction. Astron. Astrophys. Suppl. Ser. 1996, 117, 393–404. [CrossRef]
Figure 1.
Conceptual description of the CERES project.
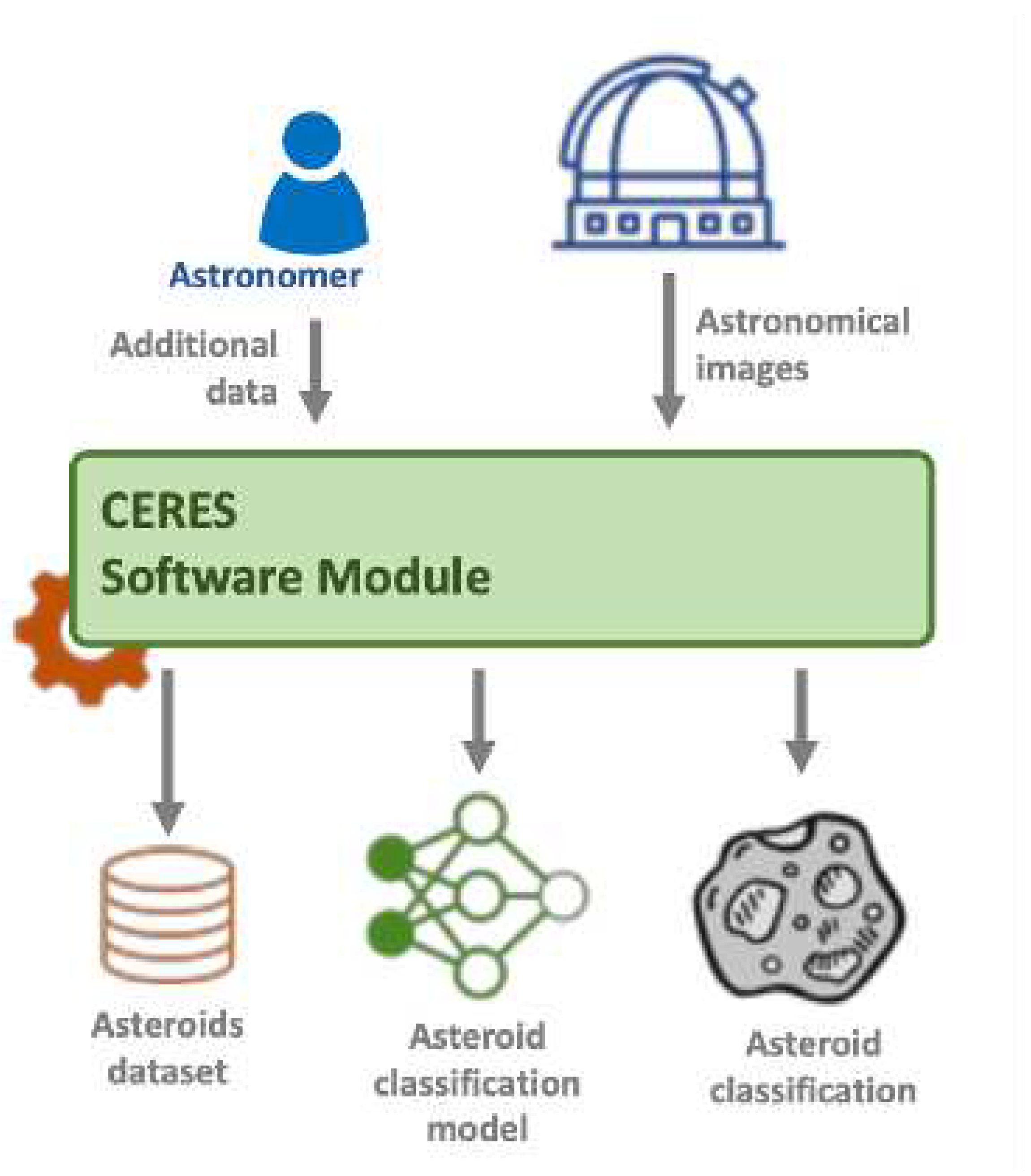
Figure 2.
Architectural description of the proposed solution.
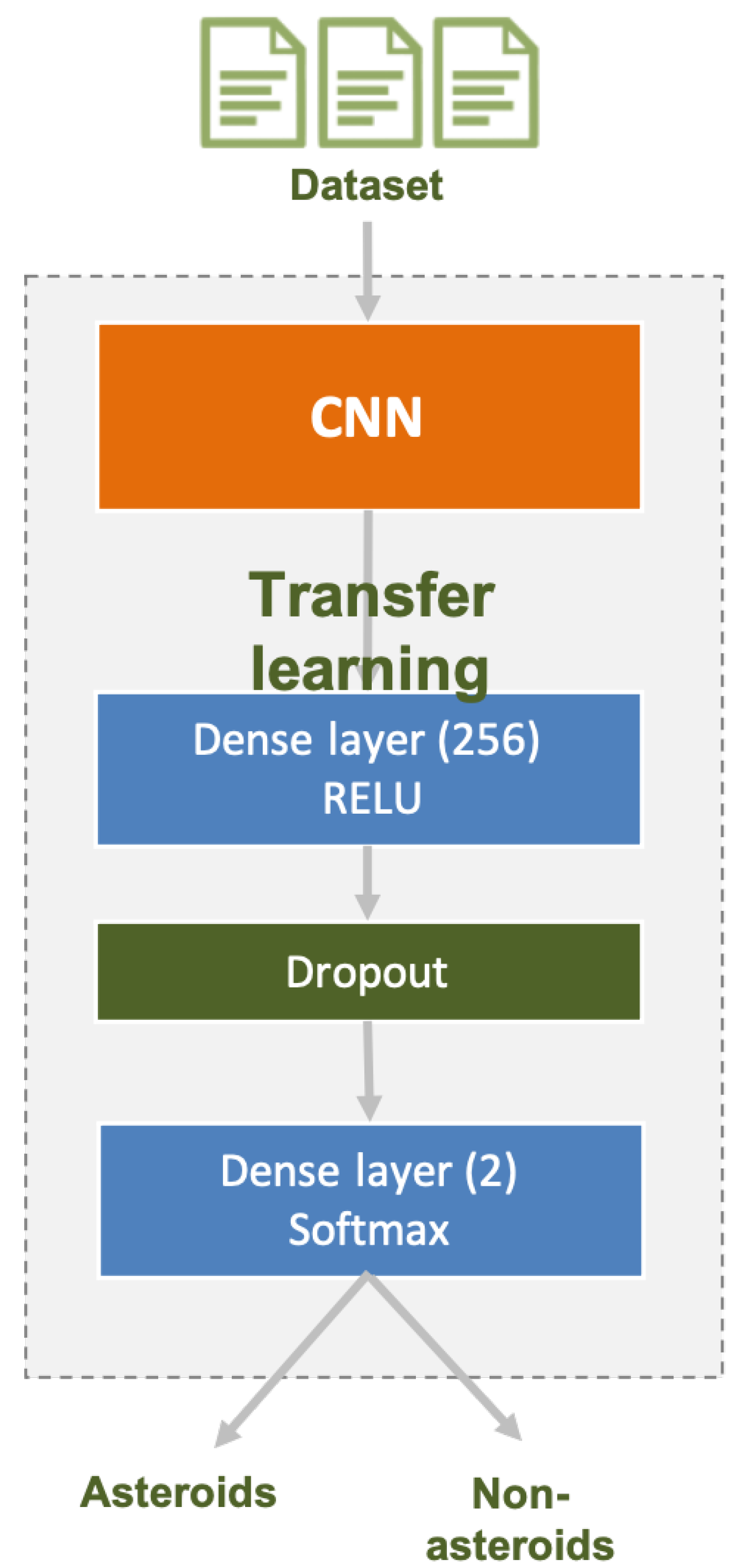
Figure 3.
Processing flow.
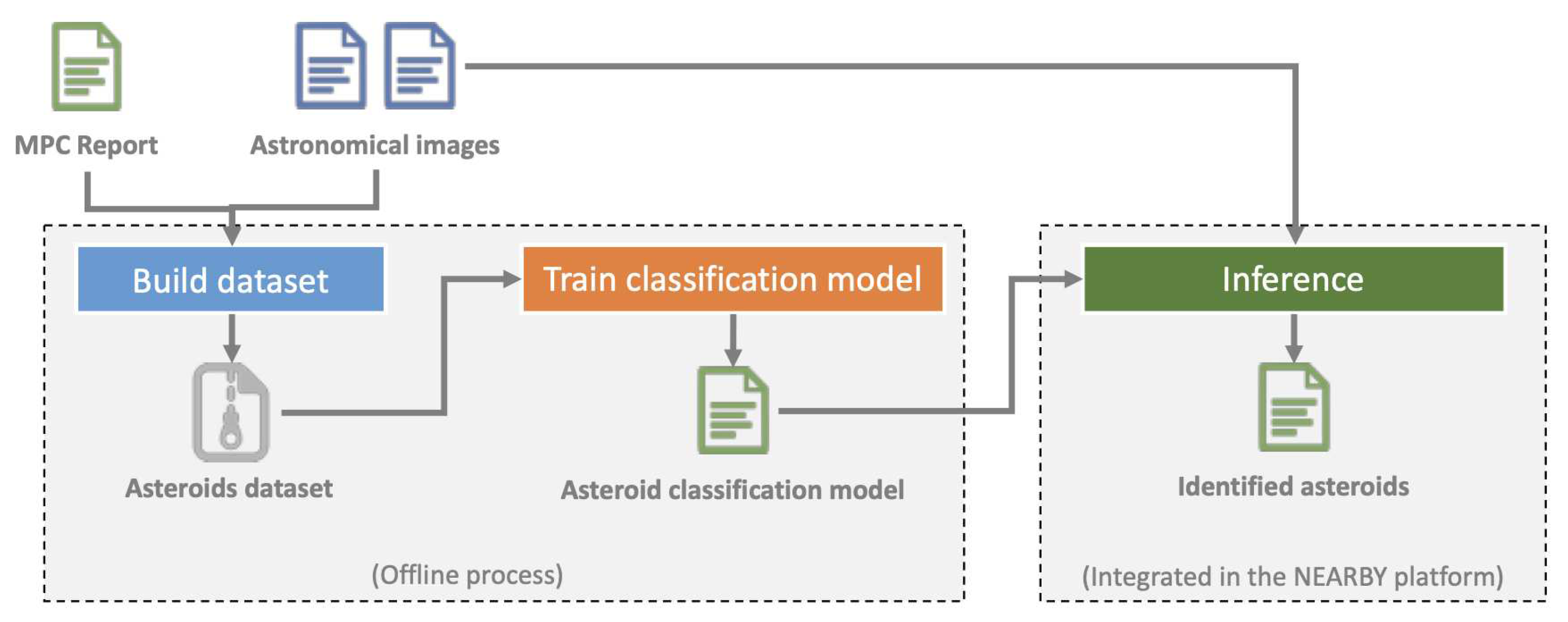
Figure 4.
Examples of images containing valid asteroids.
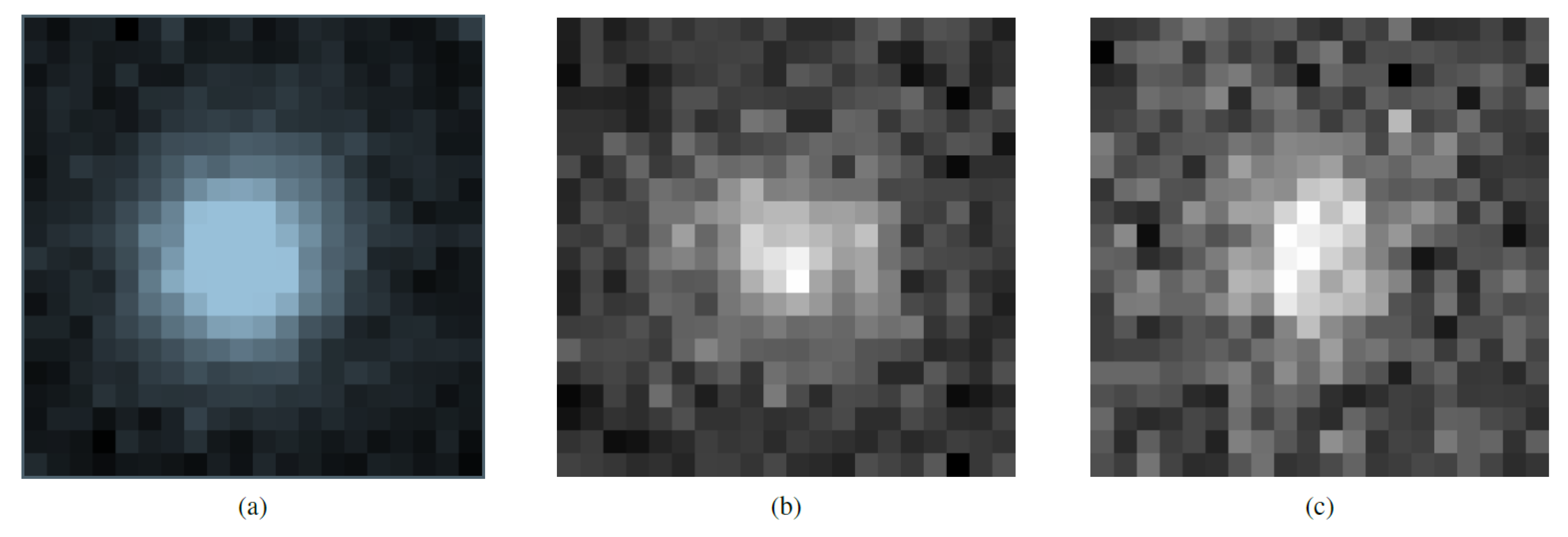
Figure 5.
Examples of images containing non-asteroids.
Figure 6.
Confusion matrices.
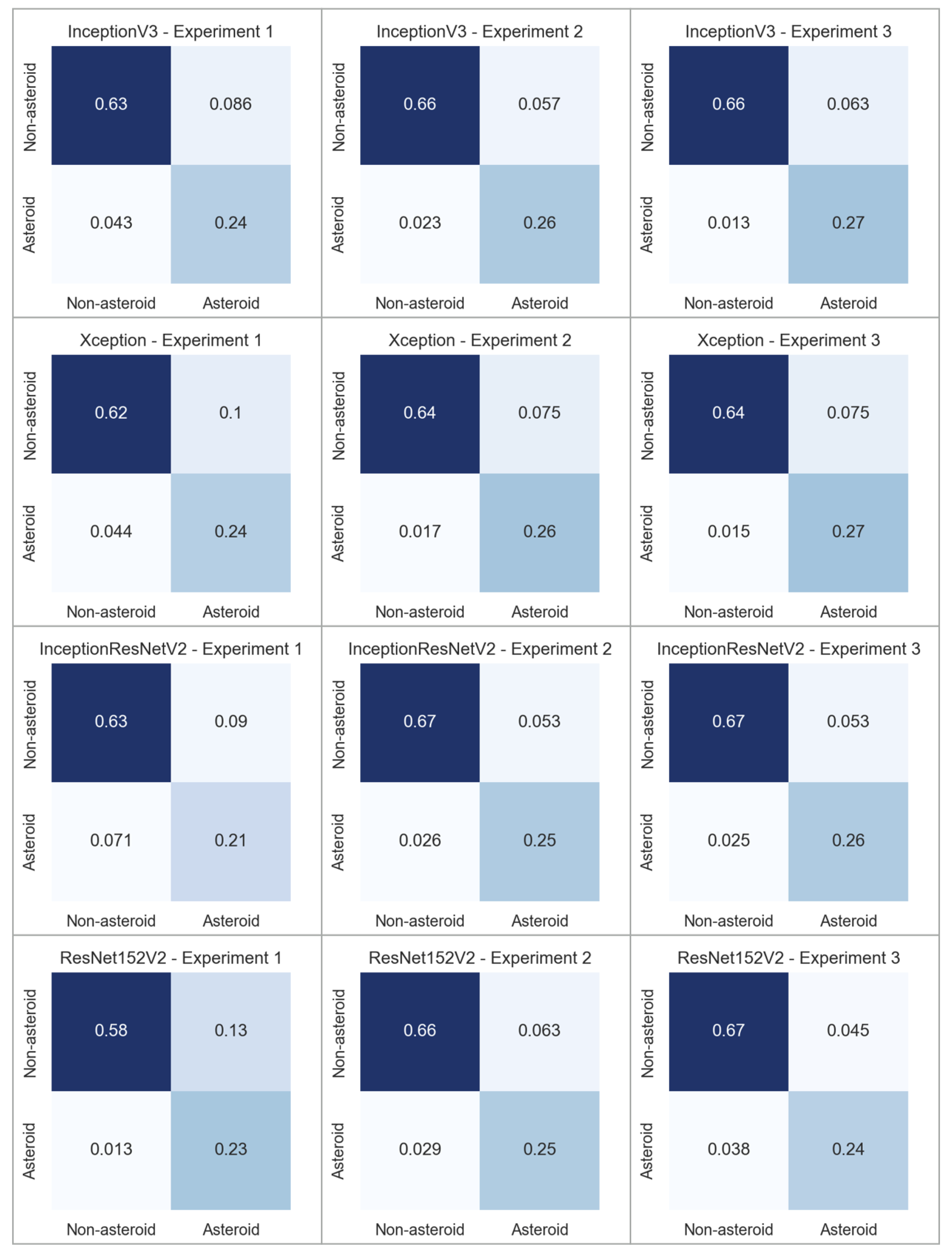
Figure 7.
Correct vs incorrect classification for the asteroid class.
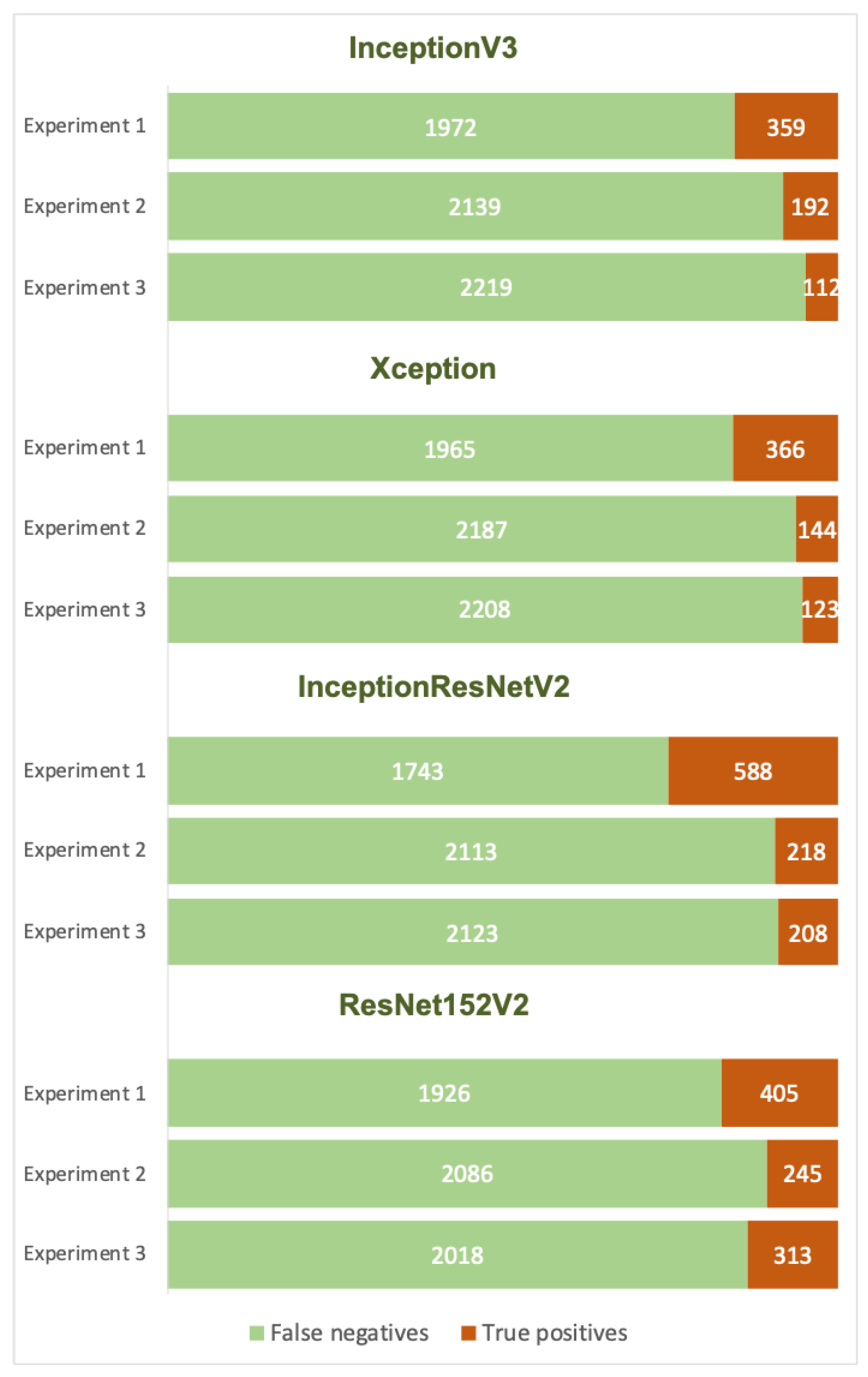

Table 1.
Distribution of the images.
| Non-asteroid class | Asteroid class | |
|---|---|---|
| Training set | 38146 | 21733 |
| Validation set | 433 | 747 |
| Test set | 5983 | 2331 |
Table 2.
InceptionV3 classification results.
| precision | recall | f1-score | ||
|---|---|---|---|---|
| Experiment 1 | Non-asteroid class | 0.94 | 0.88 | 0.91 |
| Asteroid class | 0.73 | 0.85 | 0.79 | |
| Experiment 2 | Non-asteroid class | 0.97 | 0.92 | 0.94 |
| Asteroid class | 0.82 | 0.92 | 0.86 | |
| Experiment 3 | Non-asteroid class | 0.98 | 0.91 | 0.94 |
| Asteroid class | 0.81 | 0.95 | 0.87 |
Table 3.
InceptionV3 confusion matrix.
| Predicted non-asteroid class | Predicted asteroid class | ||
|---|---|---|---|
| Experiment 1 | Actual non-asteroid class | 5266 | 717 |
| Actual asteroid class | 359 | 1972 | |
| Experiment 2 | Actual non-asteroid class | 5507 | 476 |
| Actual asteroid class | 192 | 2139 | |
| Experiment 3 | Actual non-asteroid class | 5456 | 527 |
| Actual asteroid class | 112 | 2219 |
Table 4.
Xception classification results.
| Xception | ||||
|---|---|---|---|---|
| precision | recall | f1-score | ||
| Experiment 1 | Non-asteroid class | 0.93 | 0.86 | 0.90 |
| Asteroid class | 0.70 | 0.84 | 0.77 | |
| Experiment 2 | Non-asteroid class | 0.97 | 0.90 | 0.93 |
| Asteroid class | 0.78 | 0.94 | 0.85 | |
| Experiment 3 | Non-asteroid class | 0.98 | 0.90 | 0.93 |
| Asteroid class | 0.78 | 0.95 | 0.85 |
Table 5.
Xception confusion matrix.
| Predicted non-asteroid class | Predicted asteroid class | ||
|---|---|---|---|
| Experiment 1 | Actual non-asteroid class | 5147 | 836 |
| Actual asteroid class | 366 | 1965 | |
| Experiment 2 | Actual non-asteroid class | 5362 | 621 |
| Actual asteroid class | 144 | 2187 | |
| Experiment 3 | Actual non-asteroid class | 5356 | 627 |
| Actual asteroid class | 123 | 2208 |
Table 6.
InceptionResNetV2 classification results.
| precision | recall | f1-score | ||
|---|---|---|---|---|
| Experiment 1 | Non-asteroid class | 0.90 | 0.88 | 0.89 |
| Asteroid class | 0.70 | 0.75 | 0.72 | |
| Experiment 2 | Non-asteroid class | 0.96 | 0.93 | 0.94 |
| Asteroid class | 0.83 | 0.91 | 0.86 | |
| Experiment 3 | Non-asteroid class | 0.96 | 0.93 | 0.94 |
| Asteroid class | 0.83 | 0.91 | 0.86 |
Table 7.
InceptionResNetV2 confusion matrix.
| Predicted non-asteroid class | Predicted asteroid class | ||
|---|---|---|---|
| Experiment 1 | Actual non-asteroid class | 5236 | 747 |
| Actual asteroid class | 588 | 1743 | |
| Experiment 2 | Actual non-asteroid class | 5540 | 443 |
| Actual asteroid class | 218 | 2113 | |
| Experiment 3 | Actual non-asteroid class | 5541 | 442 |
| Actual asteroid class | 208 | 2123 |
Table 8.
ResNet152V2 classification results.
| precision | recall | f1-score | ||
|---|---|---|---|---|
| Experiment 1 | Non-asteroid class | 0.92 | 0.81 | 0.86 |
| Asteroid class | 0.63 | 0.83 | 0.72 | |
| Experiment 2 | Non-asteroid class | 0.96 | 0.91 | 0.93 |
| Asteroid class | 0.80 | 0.89 | 0.84 | |
| Experiment 3 | Non-asteroid class | 0.95 | 0.94 | 0.94 |
| Asteroid class | 0.84 | 0.87 | 0.85 |
Table 9.
ResNet152V2 confusion matrix.
| Predicted non-asteroid class | Predicted asteroid class | ||
|---|---|---|---|
| Experiment 1 | Actual non-asteroid class | 4861 | 1122 |
| Actual asteroid class | 105 | 1926 | |
| Experiment 2 | Actual non-asteroid class | 5460 | 523 |
| Actual asteroid class | 245 | 2086 | |
| Experiment 3 | Actual non-asteroid class | 5606 | 377 |
| Actual asteroid class | 313 | 2018 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



