
Submitted:
14 August 2023
Posted:
15 August 2023
You are already at the latest version
Abstract
This work investigates the sliding mode control (SMC) problem for a class of uncertain switched systems subject to asynchronous switching and an assigned finite time constraint. Two important issues are how to ensure the reachability of state trajectories within the assigned time and the input-to-output finite-time stability (IO-FTS) of the closed-loop switched systems during the whole phase under asynchronous switching. To achieve these objectives, an asynchronous sliding mode controller with adjustable parameters is constructed to drive the state trajectories onto the sliding surface during the assigned finite-time interval. By means of the partitioning strategy, sufficient conditions for the IO-FTS of the closed-loop switched are derived during the whole phase [0,T] using the multiple Lyapunov function (MLF) approach. Additionally, the asynchronous characteristics are detailedly investigated while analyzing the reachability of a specified sliding surface. Finally, an illustrative example is given to illustrate the effectiveness of the proposed method.
Keywords:
Switched systems
; input-output finite-time stability
; asynchronous switching
; sliding mode control
1. Introduction
As well known, switched systems consist of a family of subsystems described by differential or difference equations, along with a switching law that orchestrates the transitions between these subsystems. In the few decades, switched systems have garnered considerable attention from researchers due to their powerful potential in various practical applications, such as stirred tank reactors [1], automobile control systems [2], and other fields. Numerous theoretical results related to switched systems have been provided, especially concerning the Lyapunov stability [3,4,5,6].
It is important to note that the previous research results have mainly focused on asymptotic stability and exponential stability, which describe the system’s behavior over an infinite-time interval. However, in practical industrial processes such as flight control [7] and mobile robots [8], the operating time may be specific and finite. This has sparked significant attention to the issue of finite-time stability (FTS) ever since it was first introduced in [9]. In some cases, only the output, not the state, needs to be constrained within a bound. As a special case of FTS, input-output finite-time stability (IO-FTS) examines the effects of output constraints on system performance [10,11]. A system is considered IO-FTS if, for a given class of norm bounded input signals over a specified time interval T, the outputs of the system do not exceed a predetermined threshold during T. There has been significant research on the problem of IO-FTS, covering various system types, such as singular systems [12,13], fuzzy systems [14], Markovian systems [15], and so on. More recently, several interesting results have been investigated concerning IO-FTS for switched systems [16,17,18]. In [16], through the construction of several linear copositive Lyapunov functions and the utilization of the mode-dependent average dwell time (MDADT) methodology, sufficient conditions are derived to ensure the IO-FTS of the resultant closed-loop switched system. A suitable state feedback controller is designed for switched singular continuous-time systems in [17].
In an ideal scenario, the switching of the controller is perfectly synchronized with the switching of the system. However, in many real-world situations, there can be a delay in the switching signal available to the controller compared to the system’s switching, resulting in asynchronous switching in the closed-loop system. This asynchrony arises due to the time required for communication between the system and the controller through a communication channel. As a result, there are inevitable instances of asynchronous switchings between the system mode and the controller. As well known, sliding mode control (SMC) has proven to be an effective robust control approach against uncertainties and external disturbances, with successful applications in a wide variety of complex systems and engineering domains. The SMC has been extended to switched systems [19,20,21,22]. However, it’s worth noting that all the aforementioned works considered system dynamic behaviors over a sufficiently long (in principle infinite) time interval without any constraint on transient dynamics. To address finite-time SMC, Zhao et al. [23] explored the finite-time bound (FTB) problem of SMC for a class of switched systems with unmeasured states but still under the synchronous switching assumption. However, there is a lack of results regarding the IO-FTS problem of SMC for a class of switched systems under asynchronous switching.
In this work, we will investigate the IO-FTS problem of SMC for a class of uncertain switched systems under asynchronous switching. Firstly, the IO-FTS concept is introduced for the relevant switched system and a suitable SMC law is designed to ensure the reachability of the mode-dependent sliding surface within a finite-time interval. Utilizing ADT and MLF techniques, the corresponding IO-FTS for both the reaching phase and sliding motion phase are attained under asynchronous switching. Subsequently, we present a partitioning strategy that effectively analyzes the IO-FTS characteristics of the switched system over the whole finite-time interval.
Notations. Throughout this paper, the symbol denotes a real vector or induced matrix norm for vectors in the Euclidean space. denotes the set of nonnegative real numbers. is the n-dimensional vector space and is the set of nonnegative integers. The notation means that P is real symmetric and positive definite (negative definite) matrix and I is used to represent an identity matrix of appropriate dimensions. For any symmetric matrix P, and denote the maximum and minimum eigenvalues of matrix P, respectively, and `*’ represents an ellipsis for terms induced for symmetry. And we define .
2. Problem Formulation
Consider the uncertain switched system as follows:
where represents the state; is the control input; is the measured output; is the external disturbance; is a nonlinear function satisfying with a known constant. The matrices is a family of known matrices depending on an index set , and specifies the index of the active subsystem at each time instant t. The switching signal of subsystems is given by , which means that the -th subsystem is activated when . Furthermore, indicates the activation of the i-th subsystem. Due to the asynchronous switching, the practical switching instant of the controller may differ from that of the system. For convenience, is introduced to denote the practical switching time of the controller. implies that the -th controller operates within the interval , where , is said to be the mismatched period between the controller and the system.
For each switching signal , we denote the system associated with the i-th subsystem by
Thus, system (1) can be rewritten as
Assumption 1.
The external disturbance is the time varying and the set W coincides with the set of the uniformly bounded signals over , defined as , where is a known scalar.
Assumption 2.
denotes parameter uncertainty and satisfies
where and are the known constant matrices and is an unknown time varying matrix satisfying .
Next, we will proceed to establish the definition of input-output finite-time stability on the switched system (1). Additionally, the definition of the average dwell time is also recalled for the development of the main results in this work.
Definition 1.
Given a time interval , explicit output constraint scalars , disturbance signals defined over , a weighted matrix . The switched system (1) with is said to be IO-FTS with respect to , if
Definition 2.
For any , let denote the switching number of over . If holds for and an integer , then is called an average dwell time.
Lemma 1.
For the specified parameters , the switched system (1) is IO-FTS with respect to , if only if there exist auxiliary scalars satisfying such that each subsystem is IO-FTS with respect to during reaching phase and IO-FTS with respect to during sliding motion phase, where .
3. Integral sliding surface design
In this work, we utilize integral sliding mode control to effectively stabilize a switched system (1) under asynchronous switching. In general, there are two periods for SMC design. The first period is the reaching phase, that is, the state trajectories are driven onto the established sliding mode surface. During this period, the state is controlled by the designed sliding mode controller. The second period is the sliding motion, that is, the state trajectories move along the sliding mode surface. During this period, the state may be taken under the enforcement of equivalent control law .
For the purpose of presentation clarity, it is convenient to denote the mismatched period as and the matched period as .
The integral sliding surface function is designed as follows:
where matrix G is chosen such that is nonsingular and will be designed later.
Within the designated finite interval , a suitable sliding mode controller is designed to drive the trajectories of the estimated state onto the specified sliding surface in a finite time with and then are maintained there for the remaining time interval . In order to achieve this objective, the SMC law is constructed as
where the robust term is given as
with , , , . The gain will be obtained in Theorem 4 and is the adjustable parameter to be further described in Theorem 1.
In the forthcoming sections, the aforementioned SMC law will be firstly proven to ensure the reachability of the sliding surface within the interval . Subsequently, the derived sufficient conditions for IO-FTS of the closed-loop switched system during both the reaching phase and the sliding motion phase will be presented.
4. Reachability with
The analysis of the reachability of sliding surface will be analyzed in the subsequent theorem.
Theorem 1.
Consider the uncertain nonlinear switched system (1). The sliding surface is chosen as (6). If the desired SMC law is designed as Eq.(7) and the adjustable parameters satisfies
then the specified sliding surface can be reached in a finite time with .
Proof of Theorem 1.
Choose the Lyapunov function
From Assumption 1, it is easily obtained that . Thus, substituting (7) and the fact of into (11) yields
Further, due to the fact
one has
When , it can also get (14).
By integrating the expression (14) from 0 to , it is easily obtained that
We can obtain that
Due to the condition , we get
Thus, from condition (9), it can be shown that trajectories of state estimate will be driven onto the specified sliding surface in finite time with . □
5. IO-FTS within
In this section, IO-FTS problems of the switched systems (1) during the reaching phase and the sliding motion phase will be separately analyzed using the ADT method, respectively. Subsequently, the sliding mode gains for the whole phase will be provided.
During , the SMC law mismatches with the subsystem, that is, . Then, the SMC law is formulated as
Substituting the above SMC law into the switched system (1), the closed-loop switched system can be obtained as follows:
with , , .
When , the matched SMC law can be described as
5.1. IO-FTS over reaching phase
Now, we establishes the sufficient conditions for IO-FTS of the closed-loop switched system (19) and (21) within the interval .
Theorem 2.
Consider the systems (19) and (21), for given positive constant , and the a feasible scalars , , if there exist scalars and matrices , , , for any , such that
with
If the average dwell time of switching signal σ satisfies
where
, ,
,
,
Proof of Theorem 2.
Construct a Lyapunov-like function as the follows
When , the i-th subsystem is activated and the corresponding j-th controller is activated, which means , we get the time derivative of the Lyapunov-like .
Define the following auxiliary function with scalars , ,
Consider the fact of , it yields from (28) that
Note that
Then, we can get
with
By Schur’s complement, it can be shown that can be ensured by (22). Thus, it can be obtained from (30) that:
which means that
On the other hand, it is easily shown by Schur’s complement that the inequality is equivalent to the condition (22).
When , multiplying both sides of (33) with , which implies that
Then, integrating both sides of (34) from to t, one gets
Similarly, when , we define the auxiliary function:
Then, after some manipulations with the condition (22), we can get
From (25) and (27), there hold
When , from (35), (37) and (38), by using iteration, it is derived that
where denotes the total mismatched time span during and .
Moreover, when , there holds
Note that
then, we have
Noting , we have
where .
Note that the fact of with , it can obtain that
thus, one gets
When , from (24), we have
When , from the conditions , (26) and condition (23), it holds
Thus, the switched system (1) is IO-FTS with respect to during . □
5.2. IO-FTS over sliding motion phase
In the subsequent sections of this work, the IO-FTS problem will be analyzed during the sliding motion phase when . By means of sliding mode theory, as the system trajectories enter the sliding mode, it follows that and . Consequently, we can derive the following equivalent control law:
which, substituted into (1) yields the following sliding mode dynamics
with , , , , and
with .
The following theorem presents the results of the IO-FTS for the switched system (53)-(54) within the interval .
Theorem 3.
Consider the closed-loop system (53)-(54) with the integral sliding surface (6), for given positive constant , , and the a feasible scalars . If there exist positive constants and matrices , for any , such that
with
If the average dwell time of switching signal σ satisfies
Proof of Theorem 3.
Choose the Lyapunov function as
Similar to Theorem 2 to define the auxiliary functions with scalars and
When ,
Note that
Then, we can get
with
where
Consider the condition (55), by employing Schur’s complement and some operations, we can get , that is
Similarly, from the condition (56), we can also get
On the other hand, when , it holds that
When , notice that , it follows from the similar procedures to Theorem 2 that
Moreover, when , there holds
From Theorem 2, the switched system is IO-FTB during , i.e., the initial output condition of the sliding motion phase at time satisfies . Then, from the condition (59), we have
From (57) and (59), we can obtain
Thus, the switched system (53) is IO-FTS with respect to during . □
5.3. Design of gains and
It’s noteworthy that the conditions in Theorems 2 and 3 are not in the form of linear matrix inequalities (LMIs), even when the value is fixed. However, through inequality transformations, some LMIs conditions can be derived in Theorem 4. Subsequently, the gains will be designed to ensure the conditions in Theorems 2 and 3 to be hold simultaneously.
Theorem 4.
Given the parameters , positive constant , and the feasible scalars . If there exist matrices , , , , real matrixes , and scalars , and , , for any , satisfying
with
Then the switched system (19) is IO-FTS with respect to under the switching signal σ
where , . The control gain and .
Proof of Theorem 4.
For satisfying conditions in both Theorems 2 and 3, simultaneously, the following inequalities should be satisfied
with
Let . Pre-multiplying and post-multiplying and with and , respectively, and by Schur’s complement, and are equivalent to the matrix inequality and .
On the other hand, by performing a congruence transformation and Schur’s complement, the condition (23) can be obtained from (85).
By the conditions (76) and the fact that
it has
Thus, it is easily shown that the inequalities (24) and (57) are ensured by (74) and (75).
The closed-loop system (19) is IO-FTS with average dwell time and the control gain gain are given by and . □
6. Simulation examples
Consider the switched system (1) with two modes and parameters as follows:
Subsystem 1:
Subsystem 2:
The goal of this work is to construct the SMC law such that the resulting closed-loop system is IO-FTS. Let , , , , and . From the selection criterion (9), we can choose the adjustable parameter as and . Then, by solving LMIs in Theorem 4, we can get and the control gains , .
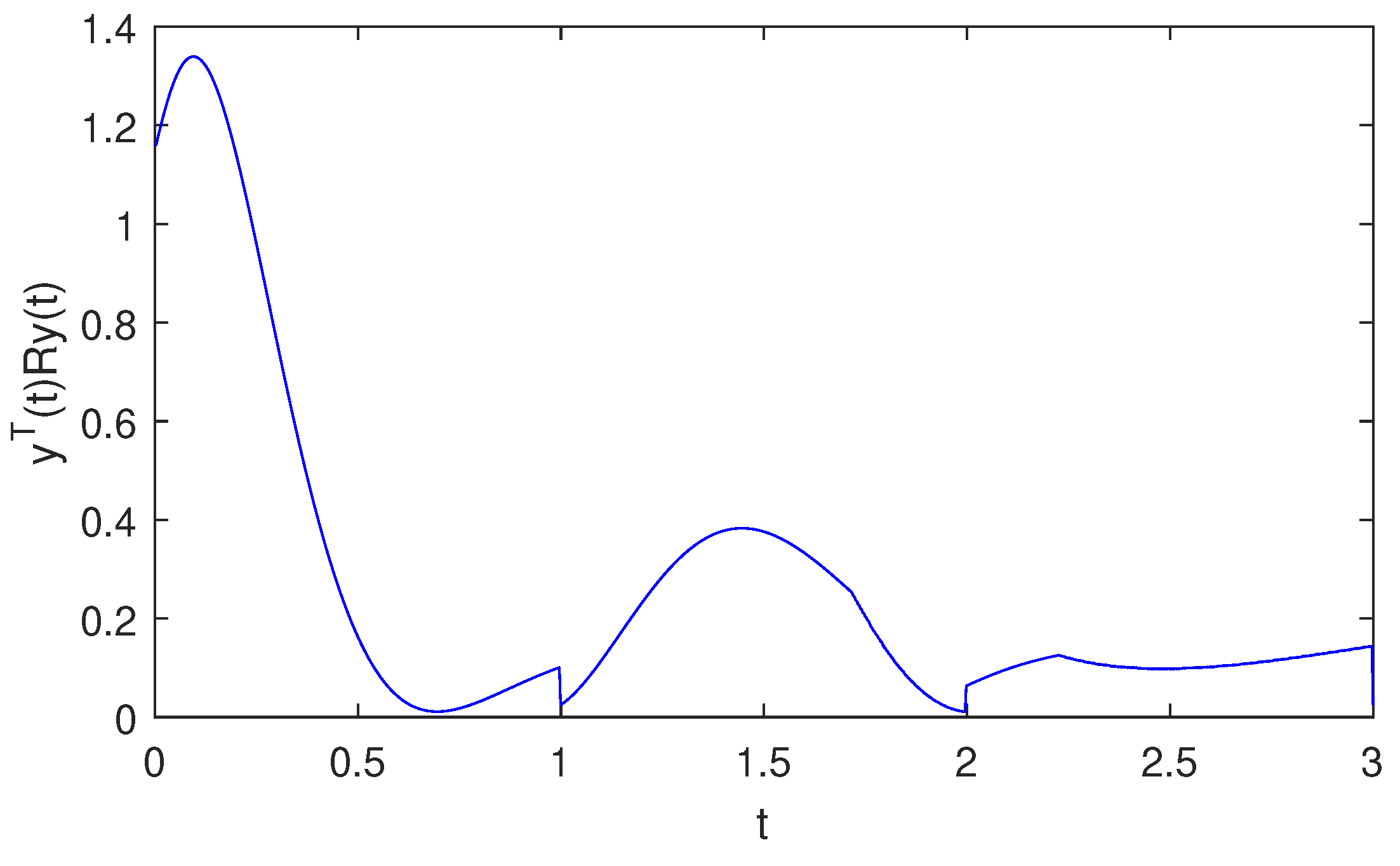
For the initial states as and the average dwell time , the simulation results are shown in Figure 1 and Figure 2. It can be seen from Figure 1 that the state trajectories of the open-loop switched systems exceed , which means the uncontrolled system is divergent. According to (26), we choose ADT as . By means of the proposed switched signal and SMC law , it is clearly shown in Figure 2 that the trajectory of for the closed-loop switched system is not beyond the threshold value in finite-time interval . Therefore, when the final time is given, the state trajectories of the controlled switching systems still are within the previously given threshold c.
7. Conclusions
In this work, we have addressed the challenge of SMC for a class of uncertain switched systems subject to asynchronous switching and finite-time constraints. To ensure IO-FTS of the switched system, a SMC controller with adjustable parameters is constructed, enabling the system’s state trajectories to reach the sliding surface within a predefined time interval. By employing a partitioning strategy and MLF approach, some sufficient conditions for the IO-FTS of the closed-loop switched ystem over the whole time interval [0, T] were derived.
Author Contributions
H.Z. conceived the main idea, designed the main algorithm, and wrote the manuscript. J.M. and Q.X. designed the main experiments under the supervision of H.Z. All authors have read and agreed to the published version of the manuscript.
Funding
This work was was funded by the National Natural Science Foundation of China grant number 62103219.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Acknowledgments
The authors gratefully acknowledge anonymous editors and reviewers.
Conflicts of Interest
The authors declare no conflict of interest.
Abbreviations
The following abbreviations are used in this manuscript:
| IO-FTS | Input-to-Output Finite-Time Stability |
| FTB | Finite-time Bound |
| MLF | Multiple Lyapunov Function |
| SMC | Sliding Mode Control |
| MDADT | Mode-Dependent Average Dwell Time |
| ADT | Average Dwell Time |
| LMI | Linear Matrix Inequality |
References
- Long, L.; Zhao, J. Robust stabilisation of non-triangular multi-input switched non-linear systems and its application to a continuously stirred tank reactor system. IET Control Theory & Applications 2013, 7, 697–706. [Google Scholar]
- Wu, X.; Lin, J.; Zhang, K.; Cheng, M. A penalty function-based random search algorithm for optimal control of switched systems with stochastic constraints and its application in automobile test-driving with gear shifts. Nonlinear Analysis: Hybrid Systems 2022, 45, 101218. [Google Scholar] [CrossRef]
- Liberzon, D.; Morse, A.S. Basic problems in stability and design of switched systems. IEEE Control Systems Magazine 1999, 19, 59–70. [Google Scholar]
- Li, Z.; Soh, C.B.; Xu, X. Lyapunov stability of a class of hybrid dynamic systems. Automatica 2000, 36, 297–302. [Google Scholar] [CrossRef]
- Daafouz, J.; Riedinger, P.; Iung, C. Stability analysis and control synthesis for switched systems: a switched Lyapunov function approach. IEEE Transactions on Automatic Control 2002, 47, 1883–1887. [Google Scholar] [CrossRef]
- Zhao, X.; Zhang, L.; Shi, P.; Liu, M. Stability and stabilization of switched linear systems with mode-dependent average dwell time. IEEE Transactions on Automatic Control 2011, 57, 1809–1815. [Google Scholar] [CrossRef]
- San Filippo, F.A.; Dorato, P. Short-time parameter optimization with flight control application. Automatica 1974, 10, 425–430. [Google Scholar] [CrossRef]
- Ou, M.; Du, H.; Li, S. Finite-time tracking control of multiple nonholonomic mobile robots. Journal of the Franklin Institute 2012, 349, 2834–2860. [Google Scholar] [CrossRef]
- Dorato, P. Short-time stability in linear time-varying systems, Polytechnic Institute of Brooklyn, 1961.
- Guo, Y.; Yao, Y.; Wang, S.; Ma, K.; Liu, K.; Guo, J. Input–output finite-time stabilization of linear systems with finite-time boundedness. ISA Transactions 2014, 53, 977–982. [Google Scholar] [CrossRef]
- Amato, F.; Ambrosino, R.; Cosentino, C.; De Tommasi, G. Input–output finite time stabilization of linear systems. Automatica 2010, 46, 1558–1562. [Google Scholar] [CrossRef]
- Li, M.; Sun, L.; Yang, R. Finite-time H∞ control for a class of discrete-time nonlinear singular systems. Journal of the Franklin Institute 2018, 355, 5384–5393. [Google Scholar] [CrossRef]
- Long, S.; Zhou, L.; Zhong, S.; Liao, D. An improved result for the finite-time stability of the singular system with time delay. Journal of the Franklin Institute 2022, 359, 9006–9021. [Google Scholar] [CrossRef]
- Kaviarasan, B.; Kwon, O.M.; Park, M.J.; Sakthivel, R. Input–output finite-time stabilization of T–S fuzzy systems through quantized control strategy. IEEE Transactions on Fuzzy Systems 2021, 30, 3589–3600. [Google Scholar] [CrossRef]
- Shi, P.; Li, X.; Zhang, Y.; Yan, J. Event-triggered quantized input-output finite-time synchronization of Markovian neural networks. IEEE Transactions on Circuits and Systems I: Regular Papers 2022, 70, 1381–1391. [Google Scholar] [CrossRef]
- Liu, L.; Cao, X.; Fu, Z.; Song, S. others. Input-output finite-time control of positive switched systems with time-varying and distributed delays. Journal of Control Science and Engineering 2017, 2017. [Google Scholar] [CrossRef]
- Feng, T.; Wu, B.; Wang, Y.E.; Chen, Y. Input-output finite-time stability of switched singular continuous-time systems. International Journal of Control, Automation and Systems 2021, 19, 1828–1835. [Google Scholar] [CrossRef]
- Yu, Q.; Xue, N. Input-output finite-time stability of fractional-order switched singular systems with D-perturbation. Fractal and Fractional 2023, 7, 341. [Google Scholar] [CrossRef]
- Su, X.; Liu, X.; Shi, P.; Yang, R. Sliding mode control of discrete-time switched systems with repeated scalar nonlinearities. IEEE Transactions on Automatic Control 2016, 62, 4604–4610. [Google Scholar] [CrossRef]
- Lian, J.; Li, C. Event-triggered sliding mode control of uncertain switched systems via hybrid quantized feedback. IEEE Transactions on Automatic Control 2020, 66, 2809–2816. [Google Scholar] [CrossRef]
- Zhao, H.; Niu, Y.; Jia, T. Security control of cyber-physical switched systems under round-robin protocol: input-to-state stability in probability. Information Sciences 2020, 508, 121–134. [Google Scholar] [CrossRef]
- Wang, J.; Yang, Y.; Xia, J.; Shi, K.; Shen, H. Coding-decoding-based sliding mode control for networked persistent dwell-time switched systems. International Journal of Robust and Nonlinear Control 2021, 31, 6055–6068. [Google Scholar] [CrossRef]
- Zhao, H.; Niu, Y.; Song, J. Finite-time output feedback control of uncertain switched systems via sliding mode design. International Journal of Systems Science 2018, 49, 984–996. [Google Scholar] [CrossRef]
Figure 1.
Evolution of in open-loop case.
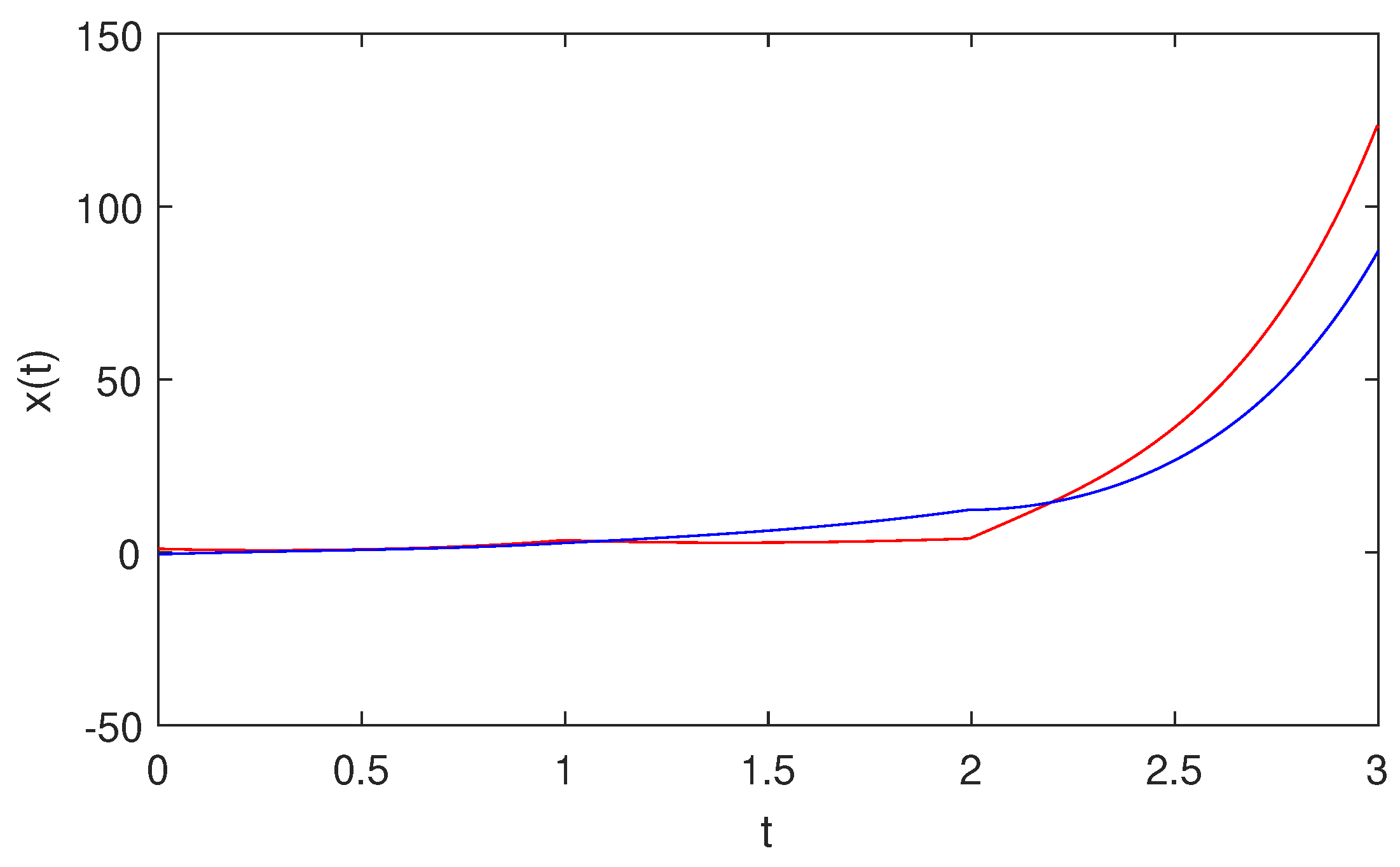
Figure 2.
Evolution of in closed-loop case.
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



