
Submitted:
15 August 2023
Posted:
16 August 2023
You are already at the latest version
Abstract
In the present work, the main methodologies used to reconstruct wind fields in the U-SPACE have been analyzed. The SESAR U-SPACE program aims to develop an Unmanned Traffic Management system with a progressive introduction of procedures and services designed to support a secure access to the air space for a large number of drones. The Italian Aerospace Research Center (CIRA) is carrying out the EDUS project focused on the development and validation of operating platform demonstrators serving the micro-scale weather forecasts and the collection of information necessary for the definition of the flight plan of the drones in urban contexts. For this reason, the state of art methodologies that can be used to estimate winds at low altitudes in urban areas starting from available observational data have been reviewed in the present paper. Some of these techniques were originally developed for reconstruction at high altitudes, but successively adapted to treat different heights. A common approach to all techniques is to approximate the probabilistic distribution of wind speed over time with some parametric models, apply spatial interpolation to the parameters and then read the predicted value.
Keywords:
U_SPACE
; drone flight
; wind field reconstruction
1. Introduction
The concept of U-SPACE has been introduced in order to support commercial operations with drones, especially those characterized by great complexity and automation [1]. The SESAR U-SPACE program [2] aims to develop an UTM (Unmanned Traffic Management) system, with a progressive introduction of procedures and services designed to support a secure efficient and protected access to the air space for a large number of drones. In this view, the need arose to develop specific services for drone operation in urban contexts, in particular with respect to the availability of local weather forecasts (hazard detection and nowcasting) and information for navigation in high density population areas, since meteorological conditions could have a strong impact on the drone flight. The “micro-weather management” [3] in particular is considered one of the enabling factors for operations beyond the line of sight in an urban context, such as to have an urgent nature for the first implementation solutions of the national U-Space.
Within this framework, the Italian Aerospace Research Center (CIRA, Italy) is carrying out the internal project EDUS “Infrastrutture di elaborazione dati locali per U-Space”. The project focuses on the development and validation of operating platform demonstrators serving the micro-scale weather forecasts and the collection of information necessary for the definition of the flight plan of the drones in urban contexts. These platforms will be built upon the Meteo Service Center already existing at CIRA [4], which collects and process observational and forecast atmospherical data on different time ranges, provided by ground stations, satellite data and NWP models (in particular COSMO-LM [5] and ICON [6]). In this perspective, the project exploits basic technologies and tools that are already available and validated in similar operational contexts, providing for an adaptation to the specific development needs of the national U-SPACE. Compared with other meteorological variables, the observational data of wind fields are generally scarce, for this reason the research in this field has become an urgent need to support civil aviation.
The present work contains an analysis of the state of art on methodologies that can be used to estimate winds at low altitudes in urban areas. Some of these techniques were originally developed for reconstruction at high altitudes, but successively they have been adapted to treat different heights. A common approach to all techniques is to approximate the probabilistic distribution of wind speed over time with some parametric models, apply spatial interpolation to the parameters and then read the predicted value. The problem of wind forecasting is deeply felt in the aeronautical field, in fact several studies (e.g. [7]) have analyzed the effect of errors in wind forecasting on Continuous Descent Operations (CDO), concluding that the accurate knowledge of the actual wind conditions is of the utmost importance, since about 2/3 of the average error is due to an incorrect wind forecast. In [8], Dalmau et al. combined a nonlinear predictive control model (NMPC) that cyclically updates an aircraft's optimal trajectory with a wind network through which aircraft and ground systems share observed real-time wind data to improve flight profile prediction. The results showed how the availability of updated wind data allows to significantly improve the performance of the NMPC, along with significant fuel savings. This paper is organized as follows: in Section 2, Section 3 and Section 4 the main methodologies that can be used to estimate low altitudes winds in urban areas are presented. Section 5 describes some examples of applications of the Meteo Particle Model (MPM) while a discussion and the main conclusions are presented in Section 6.
2. Estimation of wind profiles using airborne sensors
In order to have a reliable estimation of wind, currently pilots mainly use bulletin winds and meteorological charts, which are defined on grids at resolution of about 10 km, generally updated once at hour. On the basis of these charts, pilots insert wind data into the Flight Management System (FMS) to make estimates of the fuel required and flight time. Several studies tried to find new solutions to improve the information quality to provide to the FMS, from a simple profile based on the wind measured on-board to data generated by models. Mondoloni [9] used statistical data and techniques based on the Kalman filter [10] to estimate wind values aimed to the trajectory definition. Other authors used radar tracks to estimate wind fields in the neighborhood of an aircraft and then used the Kalman filter to reduce the effects of measurement noise. Other solutions are able to provide a high-resolution profile, but do not offer a large update frequency or rather provide only an estimate for a selected area. To build high-resolution wind profiles in real time, de Jong et al. [11] introduced AWEA (Airborne Wind Estimation Algorithm), a new algorithm based on the fact that modern aircrafts are equipped with automatic systems (e.g. ADS-B [12]) able to send and receive atmospheric data, allowing the reception of information from vehicles in proximity, in short time. AWEA is able to build wind profiles by using the Kalman filter, reducing the noise and correlating the various measurements received along the trajectory. This approach has the advantage that all the aircrafts collect data and then they operate as airborne sensor, so that the resolution and the frequency of wind estimate update is increased. In this way, the software packages for the trajectory forecast can use the most recent wind estimates available.
AWEA uses onboard measurements or provided by other aircrafts to build a wind profile along the own trajectory by using a stochastic model, without using physical laws. All the observations are grouped into intervals of predefined altitudes and then processed through a Kalman filter, even to assign lower weights to those measurement taken at large distance from the trajectory being considered. Filtered and weighted data are then used to define a wind estimate at each altitude for a short time interval, while the final profile is built using a linear interpolation. The advantage of using aircraft-collected information is that such data are spatially and temporally concentrated around the most crowded tracks and in the maneuver areas of airports. On the other side, the wind estimate accuracy is lower in less crowded areas, but this not implies severe problems since under these conditions a lower accuracy in the trajectory forecast is acceptable. AWEA can be run onboard or on the ground station: in the first case, it uses own data and information received from aircrafts in the neighborhood, eventually supported by a profile received from the ground station; in the second case, the ground station receives meteorological information to continuously estimate a wind profile representative of the whole Terminal Control Area (TMA). As soon as an aircraft enter the TMA, it receives the last estimate wind profile needed to update the planning of the last descent phase. This methodology is able to create specific profiles tailored to each airplane entering the TMA or create a unique profile. The algorithm works through the following steps:
- Definition of a flight trajectory.
- Generation of a first attempt solution. It is produced through a standard logarithm profile starting from a measurement performed onboard.
In which the velocity Vw changes with the altitude h and depends on the wind velocity Vw0 measured at an assigned height h0. The numerical value of the p exponent is empirically obtained and is equal to 1/7.
- Kalman filter update at the frequency 1Hz.
Figure 1 shows a diagram block describing the usage of the Kalman filter in AWEA. The model was tested near the Schipol airport (The Netherlands) using radar data provided by the Royal Netherlands Meteorological Institute. Two case studies were considered: the first one was an off-line simulation, the second was a fast-time simulation study into aircraft spacing. In the first case, a logarithmic wind profile calculated with a measure from an aircraft (from 0 to 3000 meters) with the superposition of a normal distributed noise was used as input for AWEA. The numerical simulations revealed that the algorithm is able to reduce the measurement noise from 1.94 knots to 1.35 knots. Moreover, the estimated wind profile can be used to forecast the wind in locations that are positioned farther along the trajectory. In the second case, the ground based AWEA used broadcast measurements from the aircrafts within a TMA to define a single wind profile able to represent the wind field of the entire TMA. Results showed that AWEA significantly reduced the root mean square error in estimating the prevailing wind. Currently, the availability of meteorological data (including ADS-B) is still limited, but once these reports become widely available, AWEA could be adapted and evaluated in a real-time environment onboard an aircraft.
3. Wind field reconstruction with Random Fourier Features
In a recent work, Kiessling et al. [13] analyzed a method for wind field reconstruction based on a machine learning approach and compared it with well-established interpolation techniques. Their approach was mainly devoted to the support of wind farm planning, for which measurements are used to estimate the expected aggregate energy output. The model considered approximates data by means of a Fourier series, exploring the frequency domain by using a Metropolis [14] adaptive algorithm: at each step, the Fourier coefficients are optimized with respect to a loss function. This method does not consider previous or future time steps, then only a subset of the physical hypothesis on the system is actually applied. The model includes the hypothesis of divergence free flux, which is always applied in the mesoscale atmospherical models [15]:
In order to perform benchmark activities, the following classic algorithms were considered as reference: nearest neighbors, inverse distance weighting (IDW), kriging [16], random forest, neural network. The quality of the reconstruction with the model considered with respect to the classical models was measured using the Q(f) indicator, defined as the mean square deviation of the data provided by the model f(x) against observational data u.
The indicator ε(f), obtained by normalizing Q(f) with respect to the expected squared velocity was used too. The analysis of the results showed that the random model Fourier features provides the best results against the other models tested. Table 1 shows the differences of the values of indicators Q and ε related to the random Fourier features and the values related to the other models. These differences clearly show that the present method has better performances, in a statistically significant matter, with respect to other methods. Moreover, the authors indicated that a more advanced model, made up as an average between the random forest and the random Fourier features, is able to further improve the performances.
4. The Meteo Particle Model (MPM)
This model was introduced by Sun et al. [17] with the aim of providing an estimate of atmospherical variables inside the air space by means of suitable indicators, using only surveillance data from aircrafts. The original method is applicable to both wind and temperature fields. The main idea is based on the usage of a stochastic process to obtain meteorological information on a short time range (from minutes to one hour) in areas where observations are lacking, starting from data collected along high density flight trajectories. Wind and temperature state are reconstructed using virtual particles that are generated every time new observations are available (of wind and/or temperature) and that then propagate and decay over time. In this way, particle propagation allows the evaluation of atmospherical variables in those areas where measurements are not available. On the basis of MPM model, it is possible to build a short-term wind predictor based on a time dependent statistical model (Gaussian Process Regression, GPR). The GPR predictor can be built for each position of interest, in order to provide short term forecasts. However, it is necessary to record a short chronology of the states estimated by the MPM model.
The model is composed of three steps, described in the following subsections.
4.1. Selection of Input data
The ensemble of measurements performed by the different aircrafts represents a measurement array [x,y,z, u, v, T] including spatial coordinates, wind components and temperature. Initially, a probabilistic selection process is used to remove wrong measurements that could occur, specifically:
- A gaussian probabilistic function is built starting from the current field, once that mean μ e variance σ have been calculated:
In which k1 is a control parameter defined as acceptance probability factor.
- New data selection: each new data has a p probability to be accepted, in such a way that data related to extreme values have low probability to be selected. The numerical value assigned to k1 is defined by the user in an empirical way, and its value can be augmented to allow a larger tolerance (increase of the number of the accepted measurements). The value proposed by the authors of the method is 3.
4.2. Construction of particles
A particle is defined as an object able to provide information on the state of wind and temperature. Particles are generated every time that new wind measurements are available: in particular, for each measurement, N particles are generated close to the position of the aircraft that performed the evaluation. Each particle is characterized by the age (set equal to zero at the time of initialization and increased at the successive steps) in such a way that at a fixed age, the oldest particles are removed. A small variance is then assigned at the state carried by each particle, to consider the measurement uncertainties. Successively, it is assumed that particles move according with a random gaussian walking:
In which the ΔP factor è calculated as:
Along the horizontal direction (x and y) particles move according with a random track characterized by a small bias (σ), conveniently controlled by the k2 factor (particle random walk factor). Along the vertical direction (z), the propagation follows a zero-average gaussian track. All the particles are re-sampled at the end of each step. The particles that for their motion fall outside the domain (both in horizontal and in vertical direction) are removed, while the remaining ones are classified with their age, according with the following probability functions:
where α rappresents the age of the particle and σα is a control parameter (aging parameter). This resampling ensures a periodic particle renewal, in such a way that the oldest ones are removed.
4.3. Evaluation of variables value in a generic point
Numerical values of wind and temperature at each position can be calculated by using information carried by the surrounding particles. In particular, the wind in a generical position is evaluated as a weighted average of the wind values carried by the particles belonging to an ensemble P, which includes all the particles whose coordinates x,y,z are within a maximum predetermined distance from the coordinates of the position being considered.
Being the previous sums extended to all the particles of the P ensemble. The weight Wp assigned to each particle is calculated as a product of two exponential functions:
The first function establishes a relationship between the weight itself and the distance d between the particle and the position considered, the second one establishes a relation between the weight and the distance d0 of the particle from its origin:
In which Cd is a control parameter (weighting parameter). These formulae are based on the IDV technique (Inverse Distance Weighted) [18].
The MPM model does not use a predefined grid, meaning that the numerical values can be calculated in a generical point at the current hour, provided that a sufficient number of particles is present in the neighborhood of the point (generally at least ten). Once that wind and temperature values have been reconstructed, it is possible to evaluate the confidence level by using a combination of confidence functions based on different factors, for example the number of particles close to the position of interest, the average distance between the particles and the position of interest, the homogeneity of the values carried by the particles and the “strength” of the particles in relation to their age. The different confidence factors obviously assume values within different ranges, for this reason it is important to normalize these values at the same range of variability (0,1), for example by using a linear scaling technique:
5. Examples of application of the MPM
5.1. The Metsis project
The METeo Sensors In the Sky (METSIS) [19] project was realized with the aim of contributing to the wind nowcasting inside the U-SPACE Weather Information Service. The main purpose was the evaluation and communication of local wind data in real time to drones’ operators. These data are generated starting from data measured by the drones themselves. Specifically, a ground station receives wind data from drones and performs a three-dimensional wind field estimation on the area considered by using the MPM. Data are then provided to the drones’ operators by using the mentioned information service. Wind fields are updated every time that new measurements are received from individual drones. This approach could potentially improve the flight efficiency and security, since the wind greatly affects the battery duration. Moreover, it represents a low-cost solution for wind nowcasting that could be applied also to different applications. Some limitations are related to the fact that wind estimation can be produced only if a sufficient number of drones is already flying in the area considered; this limitation could be mitigated by using measurements from ground anemometers too. The approach used is the one originally developed in [17] for wind speed estimation at higher altitudes. The MPM evaluates wind fields by using a Monte-Carlo approach, assuming that these fields are pseudo-static on a short time scale, being also able to consider the effects of the presence of obstacles (trees, building). Since the current implementation of MPM is aimed to estimate low altitude wind (< 150 m), it is necessary to consider also the vertical component and the interaction with the soil, which is done by resetting the particle altitude at soil level if it ends up under the ground. Alternatively, it is possible to bounce the particles on the ground with a specular reflection of the wind direction. Measurements are performed mounting ultrasound anemometers on the drones on the top of a 50 cm aluminum pole, to reduce the effects of turbulence induced by the propeller on the measurement [20].
Sunil et al. [19] evaluated the accuracy of wind estimations provided by the METSIS system by means of a series of experiments. They used three measurement drones to collect data needed to feed MPM and a reference drone used to determine the accuracy of the methodology. A comparison was made between the output of MPM with the measurements provided by the reference drone. Measurement drones (M) were located in such a way to form an equilateral triangle (Figure 2), while the reference drone flies among four predefined positions. Several triangle sizes were considered, along with two different scenarios (static and dynamic). In the static scenario, the three M drones are located in the three angles, while in the dynamic one they fly from one angle to another, resulting in a circular trajectory, while R is always static in both scenarios. Four independent variables were considered: type of obstacle (none, trailer, tree), drone velocity (two values), triangle size, altitude. The accuracy was measured through the Mean Absolute Error (MAE):
where N is the number of observations, ei represent the MPM estimates and oi are observational values. MAE was evaluated both for wind speed and for the three direction angles, for each scenario considered.
MAE related to the wind speed resulted larger for the scenarios including an obstacle, but its value was not excessively larger than that related to the base condition: even if obstacles have a non-negligible effect on the wind velocity, MPM accuracy is not influenced by them. On the other side, direction accuracy resulted rather scarce, especially during dynamic tests. In particular, it was found that larger direction errors are related to smaller wind speeds: a part of this bias can be attributed to the inaccuracy of selected anemometers for low wind speeds. Further sensitivity tests showed that, as expected, the increase in the measurement drone numbers can be useful to improve the MPM accuracy, since it is a method exclusively based on data and does not make any assumption on the wind dynamics. Effects of obstacles do not affect the precision if measurements are available close to the obstacles themselves. An analysis aimed to quantify the effects of random measurements on the accuracy showed that these effects are limited and that the METSIS concept can be applied on wider scales.
5.2. Wind field reconstruction at Delft (The Netherlands)
The MPM method was applied in Sun et al., 2017 [21] for the reconstruction of wind fields starting from observational data ADS-B [12] (surveillance technique entrusted to aircrafts that transmit their position and other information derived from on-board systems, such as GNSS) and Mode-S [22], for an area of about 600 km of diameter, located in the vicinity of Delft. Wind vectors were calculated on a three-dimensional grid starting from data collected continuously (87600 measurements) in one hour, from 11:30 to 12:30 of 27 July 2017. For every second, the system receives 11 observations from different zones. The results provided by MPM were validated by using data provided by meteorological models as reference, in particular the analyses of GFS model [23]. Of course, it must be considered that a part of the error is due to the uncertainty that inevitably affects the reference data provided by GFS, while a part is due to the uncertainty of the data collected on-board. Evaluation was performed in terms of wind direction (considering the angle between the velocity vector calculated by MPM and the one provided by GFS) and in terms of intensity (quantifying the difference of the modules of the mentioned vectors). The analysis was split into two parts, respectively considering moderate winds (less than 10 m/s) and more intense ones (larger than 10 m/s). The average errors over the considered periods resulted of about 5 m/s and 10° for moderate winds, and about 20 m/s and 20° for intense winds.
For its intrinsic nature, MPM is characterized by a level of randomness, which is essential for some aspects, in order to simulate the uncertain wind behavior. However, it is necessary to verify if this level of randomness does excessively influence the forecast. This verification can be done repeating several times the same simulation and calculating the relevance of the difference of the results. In the test case considered, the simulation was repeated 100 times, recording a maximum difference of 1° for the direction and 1 m/s for the intensity, which can be considered acceptable. Moreover, it is necessary to quantify the model sensitivity to the availability of observational data to be provided as input to the MPM. For this reason, the MPM simulation was repeated by gradually reducing (in a random way) the quantity of input data, precisely at 90%, 70%, 50%, 30% and 10% of the total amount of data available. This kind of analysis shows that with up to 50% data loss, the accuracy still remains into an acceptable level. This test demonstrates that, within a reasonable percentage of data uncertainty, the MPM is able to provide relatively stable wind field results.
Finally, it is evident that a factor that significantly influences the correctness of the results is the input data accuracy. In order to quantify this effect, an assigned percentage (p) of input data (respectively p = 2%, 4%, 6%, 8%, 10% and 15%) was replaced by uniformly distributed random values. The analysis showed that, as expected, the average error values of the MPM output grow with p, but they remain behind reasonable limits when p is less or equal to 6%.
5.3. Model extension at different heights
The applicability of the MPM method to different levels of altitude was investigated in Zhu et al., 2021 [24]. The area object of study was the same already considered in [21], i.e. an area of about 600 km of diameter located in the vicinity of Delft. As input, the authors used data provided by the ADS-B system. The accuracy of the forecasts obtained with MPM was verified assuming the ERA-5 reanalysis [25] at resolution 0.25° as reference for the 1st January 2018 at hours 0, 6, 12 and 18 UTC, using the classic indices MAE (Mean Absolute Error), RMSE (Root Mean Square Error), COR (Pearson Correlation Coefficient), R (Cosine similarity coefficient), applied to the wind velocity vectors. Moreover, an index that combines COR and R was defined, which is particularly suitable for vector comparisons, such as wind velocity:
In which α is a numerical coefficient chosen in an empirical way, which in the present study was set equal to 0.5.
Model performances were analysed in different periods, at various altitudes. Results showed that MAE value related to the wind speed is generally between 1 and 8 m/s, while MAE related to the direction is in the range between 4 and 14°, with wind speed precision generally better than the direction one. The main factor affecting the quality of results is the amount of input data available, in particular it was clear that the model requires a fixed minimum amount of data to properly work. In order to improve the MPM performances, the authors modified the values of some empirical constants and control factors used by the method (defined in Section 4), as shown in Table 2.
The application of these new values allowed a performance improvement, as it is possible to verify by comparing the original monitoring indices values with those obtained with the application of the optimized factors (Table 3).
Of course, it must be considered that ERA5 are usually smooth data and generally do not have local changes, so it is possible that a part of the errors recorded is due to the reference dataset, which to some extent neutralizes the advantages of the algorithm.
5. Discussion and Conclusions
In the present work, the main methodologies used to reconstruct wind fields at low altitude in urban areas have been analyzed. Current research showed that the treatment of the retrieved wind field is still incomplete and a big effort from the scientific community is needed to cope with the chaotic nature of wind, the movement of aircraft, and the non-uniform distributed network of observations. In the framework of the EDUS project, CIRA is defining an operating platform demonstrator based on the existing CIRA Meteo Service Center, in order to integrate data and algorithms with newer ones, aimed to treat the urban wind, in particular the evaluation of the three components from soil up to 3 km of altitudes. A promising approach could be based on the integration of monitoring “low cost and mobile” data and other sources, such as those available from the COPERNICUS program (copernicus.eu) especially for what concerns urban areas. Given the current lack of meteorological data available in urban environments, the usage of existing measurements network will be increased, such as those coming from universities, regional agencies, civil protection and small airports. Of course, the installation of new sensors will be required, according with local stakeholders. These stations will represent the “ground truth” of remote sensing data and, along with all the data sources available, will allow the monitoring and nowcasting at high resolution of wind and other variables by using some of the algorithms described in the present work. In the opinion of the author, a step forward is represented by the coupling of NWP models with the MPM, for the feasibility features and accuracy in the results obtained with this model: in fact, the MPM addresses the stochastic characteristic of wind through particles and maintains the stability through the use of a sufficiently large number of particles. Moreover, compared to Gaussian weighted interpolation, the MPM maintains past observation information without the need of large historical measurement storage [17]. The coupling with an NWP will be realized in such a way that the MPM reads the hourly NWP output at high resolution (about 1 km), generates particles at each grid points and provides wind values at minute frequency in a generical point considered for the investigation. In this way, the MPM will provide accurate results also in those areas where a network of observational data is not available. The first results related to the coupling of MPM with the NWP COSMO over an area located in southern Italy [26] will be presented in a future work (Bucchignani, 2023, in preparation).
Funding
This research was carried out in the frame of the CIRA internal project PRORA 662 SES-AAM EDUS, funded by the DM 662/2020 of the Italian Ministry of Education.
Data Availability Statement
The data for this paper are available at the CIRA supercomputing center,Capua (Italy). For data requests please contact Dr. Edoardo Bucchignani (e.bucchignani@cira.it)
Acknowledgments
Vittorio Di Vito (CIRA) and Giulia Torrano (CIRA) are gratefully acknowledged for the effective management of the EDUS project.
Conflicts of Interest
The authors declare no conflict of interest. The funders had no role in the design of the study; in the collection, analyses, or interpretation of data; in the writing of the manuscript; or in the decision to publish the results.
References
- Barrado C, Boyero M, Brucculeri L, Ferrara G, Hately A, Hullah P, Martin-Marrero D, Pastor E, Rushton AP, Volkert A, U-Space Concept of Operations: A Key Enabler for Opening Airspace to Emerging Low-Altitude Operations, Aerospace, 2019, 7, 24. [CrossRef]
- SESAR JU, “European ATM Master Plan: Roadmap for the safe integration of drones into all classes of airspace,” Tech. Rep., Mar. 2017.
- Fang Z, Zhao Z, Du L, Zhang J, Pang C, Geng D, A new portable micro weather station, 2010 IEEE 5th International Conference on Nano/Micro Engineered and Molecular Systems, Xiamen, China, 379-382, 2010. [CrossRef]
- Rillo V, Zollo AL, Mercogliano P, MATISSE: an ArcGIS tool for monitoring and nowcasting meteorological hazards, Advances in Science and Research, 12(1), 163–169, 2015. [CrossRef]
- Steppeler J, Doms G, Bitzer HW, Gassmann A, Damrath U, Gregoric G, Meso-gamma scale forecasts using the nonhydrostatic model LM. Theor. Appl. Clim. 2003, 82, 75–96. [CrossRef]
- Zängl G, Reinert D, Rípodas, P, Baldauf M, The ICON (ICOsahedral Non-hydrostatic) modelling framework of DWD and MPI-M: Description of the non-hydrostatic dynamical core. Q. J. R. Meteorol. Soc. 2015, 141, 563–579. [CrossRef]
- Klooster J, Wichman K, Bleeker O, 4D Trajectory and Time of- Arrival Control to Enable Continuous Descent Arrivals, in AIAA Guidance, Navigation and Control Conference and Exhibit, Guidance, Navigation, and Control and Co-located Conferences, Honolulu, Hawaii, August 2008. [CrossRef]
- Dalmau R, Prats X, Baxley B, Using wind observations from nearby aircraft to update the optimal descent trajectory in real-time, Proc 13th USA/Europe Air Traffic Management Research and Development Seminar, 2019, Vienna, Austria, June 2019.
- Mondoloni S, A Multiple-Scale Model of Wind-Prediction Uncertainty and Application to Trajectory Prediction, Proc. 6th AIAA Aviation Technology, Integration, and Operations Conference (ATIO), Wichita, Kansas, September 25–27, No. AIAA 2006-7807, 1–14, 2006. [CrossRef]
- Kalman RE, A New Approach to Linear Filtering and Prediction Problems, Transaction of the ASME – Journal of Basic Engineering, 82, Series D, 1960, 35–45. [CrossRef]
- De Jong PMA, Van der Laan JJ, In ‘t Veld AC, Van Paassen MM, Mulder M, Wind-Profile Estimation Using Airborne Sensors, Journal of Aircraft, 2014, 51, 6, 1852–1863.
- de Leege A, Van Paassen M, Mulder M, Using automatic dependent surveillance-broadcast for meteorological monitoring. Journal of Aircraft. 2012; 50(1), 249-261. [CrossRef]
- Kiessling J, Ström E, Tempone R, Wind field reconstruction with adaptive random Fourier features, Proc. R. Soc. A 2021, 477, 20210236. [CrossRef] [PubMed]
- Kammonen A, Kiessling J, Plechác P, Sandberg M, Szepessy A, Adaptive random Fourier features with metropolis sampling. Foundations Data Sci. 2020, 2, 309. [CrossRef]
- Pielke R, Mesoscale atmospheric modeling. In Encyclopedia of Physical Science and Technology (ed. RA Meyers), 3rd edn, 2003, 383–389. New York, NY: Academic Press.
- Dalmau R, Pérez-Batlle M. Prats, X, 2017, September. Estimation and prediction of weather variables from surveillance data using spatio-temporal Kriging. In 2017 IEEE/AIAA 36th Digital Avionics Systems Conference (DASC) (pp. 1-8). IEEE.
- Sun J, Vû H., Ellerbroek J, Hoekstra JM, Weather field reconstruction using aircraft surveillance data and a novel meteo-particle model. PloS one, 2018, 13(10). [CrossRef]
- Zhou J, Wu Y, Yan G, General formula for estimation of monthly average daily global solar radiation in China. Energy Convers. Manag. 2005, 46, 257–268.
- Sunil E, Koerse R, Brinkman T, Sun J, METSIS: Hyperlocal Wind Nowcasting for U-space, 11th SESAR Innovation days, 2021, https://www.sesarju.eu/sites/default/files/documents/sid/2021/papers/SIDs_2021_paper_88.pdf (accessed 08/08/2023).
- Sasaki K, Inoue M, Shimura T, Iguchi M, In Situ, Rotor-Based Drone Measurement of Wind Vector and Aerosol Concentration in Volcanic Areas, Atmosphere, 2021, 12 (3), 376. [CrossRef]
- Sun J, Vu H., Ellerbroek J, Hoekstra J, Ground-based Wind Field Construction from Mode-S and ADS-B Data with a Novel Gas Particle Model, 7th SESAR Innovation Days, 2017, https://www.sesarju.eu/sites/default/files/documents/sid/2017/SIDs_2017_paper_16.pdf (accessed 08/08/2023).
- de Haan S. High-resolution wind and temperature observations from aircraft tracked by Mode-S air traffic control radar. Journal of Geophysical Research: Atmospheres. 2011; 116(D10).
- Kanamitsu M, Description of the nmc global data assimilation and forecast system, Weather and Forecasting, 4, 3, 335–342, 1989.
- Zhu, J. Zhu J. Wang H, Li J, Xu Z, Research and Optimization of Meteo-Particle Model for Wind Retrieval, Atmosphere 2021, 12, 1114. [CrossRef]
- Hersbach H. et al., The ERA5 global reanalysis, Quart. J. Royal Met. Soc., 2020, 146, 730, 1999-2049.
- Bucchignani E, Mercogliano P, Performance evaluation of high-resolution simulations with COSMO over South-Italy, Atmosphere, 12(1), 45, 2021. [CrossRef]
Figure 1.
Diagram block describing the usage of the Kalman filter in AWEA (adapted from de Jong et al., 2014).
Figure 1.
Diagram block describing the usage of the Kalman filter in AWEA (adapted from de Jong et al., 2014).
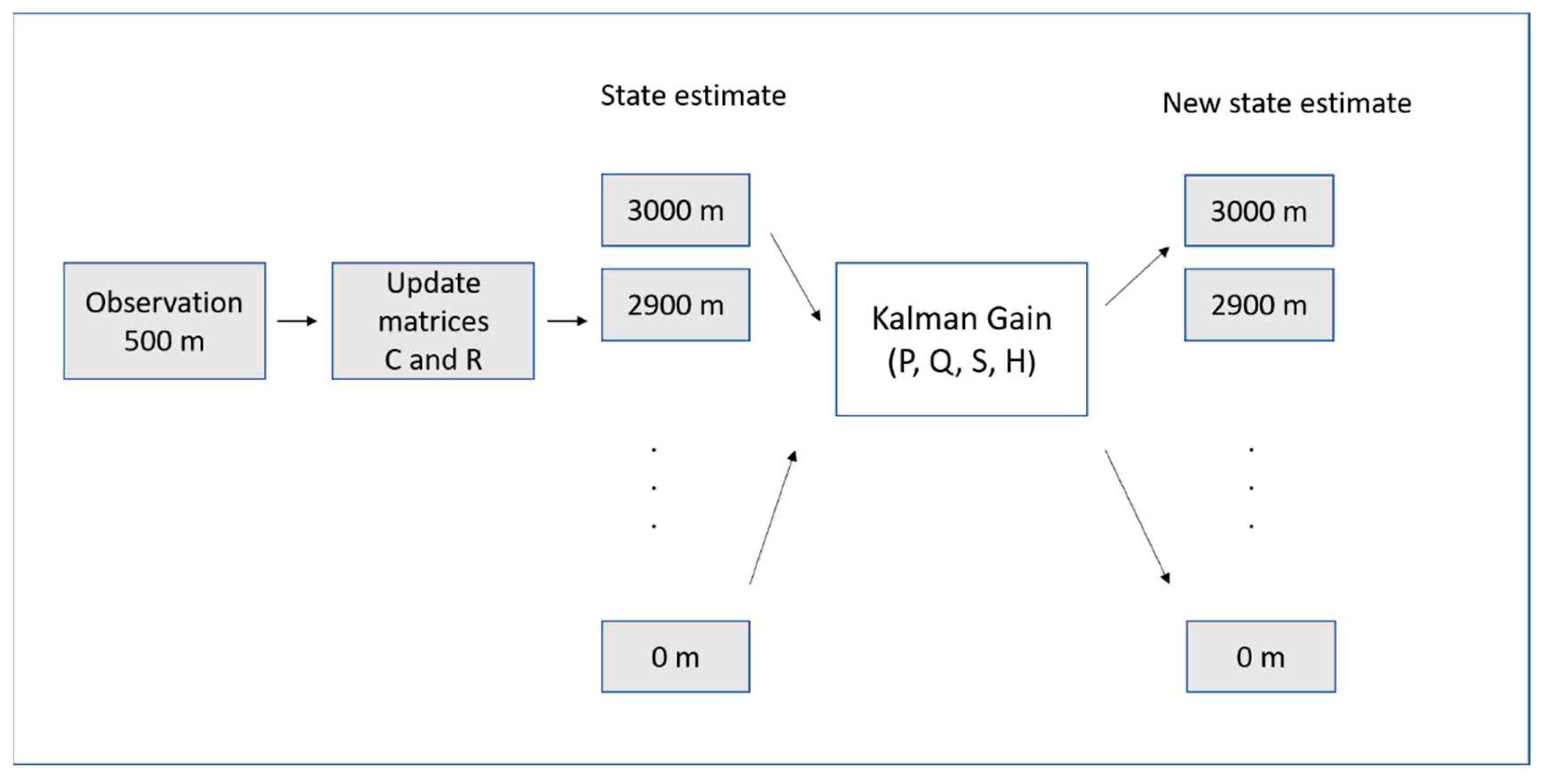
Figure 2.
Position of the reference and measurements drones (adapted from Sunil et al., 2021 [19]).
Figure 2.
Position of the reference and measurements drones (adapted from Sunil et al., 2021 [19]).
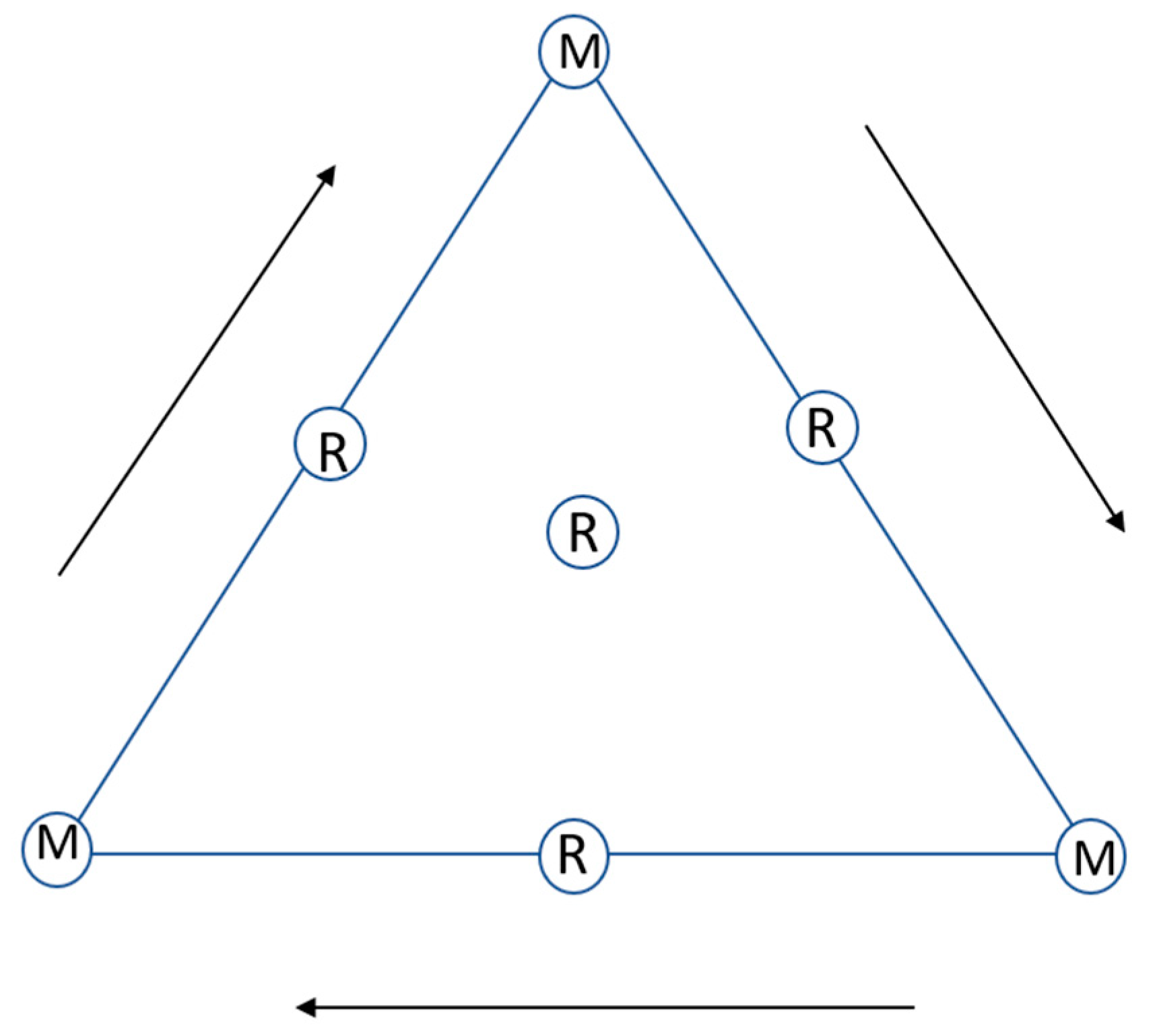

Table 1.
Differences of the values of ε(f) and Q(f) related to the random Fourier features and the other models. (data from Kiessling et al., 2021 [13]).
Table 1.
Differences of the values of ε(f) and Q(f) related to the random Fourier features and the other models. (data from Kiessling et al., 2021 [13]).
| Interpolation model | Δ ε(f) | Δ Q(f) |
|---|---|---|
| Nearest neighbours | 0.258 | 4.576 |
| Inverse distance weighting | 0.037 | 0.651 |
| Universal kriging | 0.018 | 0.318 |
| Random forest | 0.017 | 0.293 |
| Neural network | 0.011 | 0.192 |
| Fourier series | 0.010 | 0.171 |
Table 2.
Original and optimized values of some control factors defined in MPM (data from Zhu et al., 2021 [24]).
Table 2.
Original and optimized values of some control factors defined in MPM (data from Zhu et al., 2021 [24]).
| Factor | Original value | Optimized value |
|---|---|---|
| Acceptance probability factor k1 | 3 | 7 |
| Particle Random walk factor k2 | 10 | 8 |
| Number of particles per aircraft N | 250 | 300 |
| Aging parameter α | 180 | 500 |
| Weighting parameter C0 | 30 | 21 |
Table 3.
Original and optimized values of some control factors defined in MPM (data from Zhu et al., 2021 [24]).
Table 3.
Original and optimized values of some control factors defined in MPM (data from Zhu et al., 2021 [24]).
| U Component | V Component | |||
|---|---|---|---|---|
| Original value | Optimized value | Original Value | Optimized Value | |
| MAE (m/s) | 1.37 | 1.24 | 1.76 | 1.54 |
| RMSE (m/s) | 2.21 | 1.89 | 2.68 | 2.36 |
| COR | 0.95 | 0.96 | 0.93 | 0.95 |
| R | 0.99 | 0.99 | 0.93 | 0.95 |
| COMBINE | 0.97 | 0.98 | 0,93 | 0.95 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



