
Submitted:
22 August 2023
Posted:
23 August 2023
You are already at the latest version
Abstract
Water depth estimation holds paramount importance in various domains including navigation, environmental monitoring, and resource management. Traditional depth measurement methods such as bathymetry can often be prohibitively expensive and time-consuming, especially in remote or inaccessible areas. This study delves into the application of machine learning techniques, with a specific focus on the Baidu Easy DL model, for water depth estimation leveraging satellite imagery. Utilizing Sentinel-2 satellite data over Rushikonda Beach in India and processing it into remote sensing reflectance using the ACOLITE software, the research compares the performance of several machine learning algorithms, including the Stumpf Model, Log-Linear Model, and the Baidu Easy DL Model, for accurate depth estimation. The results indicate that the Easy-DL model outperforms traditional methods, particularly excelling in the 0-11 meter depth range. This study showcases the substantial potential of machine learning in the realm of remote sensing, offering robust water depth estimates, even in complex coastal environments. Furthermore, it underscores the critical role of comprehensive training datasets and ensemble learning techniques in enhancing accuracy. This research not only opens avenues for further exploration of machine learning applications in remote sensing but also highlights the promising prospects of online model APIs in streamlining remote sensing data processing.
Keywords:
Big Model
; Machine learning
; Baidu Easy-DL
; Water depth
; Satellite-based Bathymetry
1. Introduction
Water depth is an important parameter for a wide range of applications, including navigation, resource management, and environmental monitoring [1]. Accurate and up-to-date information on water depth is essential for ensuring safe navigation, managing fisheries and other aquatic resources, and monitoring changes in the environment [2]. Remote sensing is a powerful tool that allows us to gather information about the Earth’s surface without physically being there. It involves the use of satellites, aircraft, or drones to collect data about the environment using sensors that detect reflected or emitted electromagnetic radiation [3]. One of the many applications of remote sensing is water depth inversion, which is the process of estimating the depth of a body of water based on the characteristics of the reflected light [4,5].
Traditionally, water depth inversion has been performed using methods such as bathymetry, which involves physically measuring the depth of a body of water using sonar or other instruments [6]. However, these methods can be time-consuming and expensive, and may not always be feasible in remote or inaccessible areas. Remote sensing offers a more efficient and cost-effective alternative, allowing us to estimate water depth over large areas quickly and accurately [7].
In recent years, machine learning has emerged as a powerful tool for data analysis, with applications in a wide range of fields. Machine learning algorithms can learn from data to make predictions or decisions without being explicitly programmed to do so [8]. This makes them well-suited for tasks such as water depth inversion, where traditional methods may be inadequate.Machine learning is a rapidly growing field that has seen many advances in recent years, particularly with the availability of online resources [9]. These resources, such as online courses, tutorials, and documentation, have made it easier for individuals and organizations to learn about and apply machine learning techniques to various fields, including remote sensing bathymetry [10,11].
Large models, particularly large language models, have seen rapid development in recent years. These models are trained on vast amounts of data and have a large number of parameters, allowing them to generate human-like text and perform a wide range of tasks. Some examples of large language models include GPT-3, Megatron-Turing NLG, and Gopher [12]. Large models have also been applied to the field of remote sensing data processing. Remote sensing involves the collection and analysis of data about the Earth’s surface using satellites, aircraft, or drones. The amount of data generated by remote sensing is increasing dramatically, creating challenges for storage, analysis, and visualization [13].To address these challenges, researchers have developed frameworks and systems for processing remote sensing big data using large models and parallel processing. These frameworks provide scalability, flexibility, and generalization without dependency on specific data or processing techniques [13,14]. They also provide reasonable results to quality criteria such as response time, efficiency, and performance.the development of large models has had a significant impact on many fields, including remote sensing data processing. These models offer new capabilities for analyzing and understanding large amounts of data, leading to new insights and discoveries [13,14].
Baidu Easy-DL is a zero-threshold AI development platform that provides a simple and easy way to customize and deploy AI models. One of its features is table data prediction, which helps users discover potential patterns from tabular data through machine learning techniques, thereby creating machine learning models, processing new data based on machine learning models, and generating predictive results for business applications [15].
Easy DL’s structured data supports one-click customization, automatically processes data and generates machine learning models, and can achieve scenarios such as table data prediction. This feature can be used to solve binary classification, multi-classification, regression, and other problems, and is suitable for scenarios such as customer churn prediction, fraud detection, and price prediction . Baidu Easy DL platform provides a simple and easy way to customize and deploy AI models, where the table data prediction feature can help users quickly mine hidden patterns in the data and generate predictive results for business applications.
This article uses Baidu Easy DL to build a water depth inversion model. Firstly, satellite data is converted into tabular data, and then the structured data processing platform built by Baidu Easy DL is used for data prediction, and finally the predicted water depth values are obtained. Although Baidu Easy DL’s structured data prediction is not a strictly large model platform, it can provide useful reference for future remote sensing large model platforms to process remote sensing data.
2. Experimental Data Collection
2.1. The Study Areas and Sentinel-2 Imagery
We acquired bathymetric data using a modified jet ski with an acoustic survey system at Rushikonda Beach, a scenic c-shaped bay on the east coast of India, located approximately between Chennai and Kolkata (see Figure 1) [16]. The coastal area is mainly composed of fine sand with a median grain size of 0.45-0.5 mm [16]. Moreover, some parts of the beach have submerged and protruding rocky outcrops. Notably, Rushikonda Beach was selected as one of the 12 pilot beaches in India for the “Blue Flag Certification” by the Ministry of Environment, Forest and Climate Change (MoEF & CC). Therefore, continuous monitoring of the nearshore processes is important for tourism activities and safety.
In our study, we used the data obtained on November 24, 2018. We processed the images into remote sensing reflectance (Rrs or Rw) [17,18] using the latest ACOLITE software (Python 20190326.0 version) provided by the Royal Belgian Institute of Natural Sciences (RBINS) [17,18]. ACOLITE provides Rrs data (sr-1) for all visible and near-infrared bands, resampled to 10 m spatial resolution [19]. We predicted the bathymetry map based on the image data of multiple spectral reflectance bands (bands 1, 2, 3, 4, 5, 6, 8 and 10) from Sentinel-2 [19]. All spectral images were resampled to a resolution of 10x10 m. Finally, we mitigated the sun glint effect by resampling with S2 view in ACOLITE software.
2.2. In-Situ Data
We conducted two acoustic surveys on October 23-24, 2018 at Rushikonda using a modified jet ski to obtain bathymetric data. The jet ski was equipped with a 200 kHz CEESCOPETM echosounder and a 10 Hz Novatel OEMStar L1/L2 GNSS receiver, both provided by CEE Hydro systems. The echosounder had a high accuracy, with a vertical error of 1 cm ± 0.1% of the depth. The GNSS receiver had a horizontal error of about ±0.5 m. To improve the data quality, the echosounder also had an inertial motion unit (IMU) sensor to record the three-dimensional motion. The IMU sensor had an impressive accuracy, including: roll and pitch angles ±0.1° (over 360°), heading angle ±1°, heave distance ±5 cm. We applied a wave correction to the echosounder depth data using the heave data from the IMU sensor, following the method of Dugan et al. [19]. We applied a tidal correction to the depth data using the tide gauge data located near Visakhapatnam Harbor (17°40’60” N, 83°16’60” E).
3. Proposed Machine Learning Algorithms for Bathymetry Mapping
3.1. Stumpf Model
In order to avoid the situation where the radiance received by the optical remote sensor and the radiance in the deep water are negative, Stumpf et al. [20]. proposed a model based on log conversion ratio:
where m0 and m1 are the regression coefficients; n is a fixed constant, usually taken as 1000;R(λi) and R(λj) are the remote sensing reflectance of the blue band i and the green band j.
3.2. Log-Linear Model
a1, a2, a3, are the regression coefficients; L(λi) and L(λj) are the radiance of the blue band i and the green band j; L∞(λi) and L∞(λj) are the radiance of each band in deep water.
3.3. Baidu Easy DL Model
Easy-DL is an AI development platform for developers and data scientists, designed to help them quickly build high-quality AI models and implement their commercial applications. Its table prediction feature is an important part of the platform, used for predicting based on a given data table.
The table prediction feature consists of the following steps:
- Data preparation: Upload or import the data table to be used for prediction. Easy-DL supports multiple data formats, such as CSV, Excel, JSON, etc.
- Model selection: Select a suitable pre-trained model for prediction based on the characteristics of the table data and the prediction requirements.
- Data preprocessing: Preprocess the table data, including data cleaning, feature selection, data enhancement, etc., to improve the training effect of the model.
- Model training: Based on the uploaded table data and the selected model, Easy-DL will automatically perform model training. During the training process, you can monitor the training progress and view performance indicators during training.
- Model evaluation: After the model training is completed, Easy-DL provides a series of evaluation indicators, such as accuracy, precision, recall, etc., to evaluate the performance of the model.
- Model deployment: After the model evaluation is completed, the trained model can be deployed to the production environment. Easy-DL provides multiple deployment options, such as API, SDK, and custom code, to meet different application needs.
- Prediction: Apply the deployed model to actual scenarios for prediction. Through the API or SDK provided by Easy-DL, prediction on the table can be easily performed.
The table prediction feature allows developers to build and apply AI models for prediction without in-depth knowledge of AI technology and algorithms. It is suitable for various scenarios, such as commercial prediction, disease prediction, recommendation systems, etc. By using Easy-DL’s table prediction feature, developers can quickly and efficiently implement the development and deployment of AI applications.
3.4. Accuracy Evaluation Methods
The accuracy evaluation indexes of water depth accuracy are the mean absolute error (MAE),the mean relative error (MRE) and the root mean square error (RMSE), the corresponding formulas areas follows [6]:
where zi is the estimated water depth; is the actual water depth; and n is the number of water depth points.
3.5. Bathymetry Mapping
Satellite-derived bathymetry (SDB) is a technique that uses remote sensing data to estimate water depth in shallow areas. One of the key factors that affects the accuracy of SDB is the selection of water depth control points, which are used to calibrate and validate the SDB models. Usually, about 1000 control points are selected from a single image of the study area, but this method may introduce variability in the SDB results depending on the number and locations of these control points.
In this study, we propose a comprehensive and robust process for water depth retrieval using SDB. The first step of our process is to select a high-quality remote sensing image that matches the timing of the scene and measured data. We then perform atmospheric correction and remove sunlight effects to obtain accurate reflectance data. Next, we apply various bathymetry algorithms to estimate water depth from the reflectance data, and then correct for tide effects to obtain consistent water depth values. Finally, we create a topographic map by integrating the estimated water depths. Our process consists of two stages for water depth estimation. In the first stage, we convert both remote sensing data and water depth data into tabular format and use them for training purposes. In the second stage, we use Sentinel-2 data, also converted into tabular format, for depth prediction. To evaluate the performance of our proposed SDB method, we compare the predicted depths with in-situ depth values. We find that our method utilizes water depth control point information effectively, reducing depth estimation errors and improving the accuracy of water depth inversion.
4. Experimental Setup and Results
In this study, we have delved into the accuracy of water depth estimation through the utilization of multiple training datasets from Sentinel-2 images, coupled with the application of machine learning algorithms.Our training dataset encompasses a total of 1000 data points. Initially, we employed 1000 points for the estimation of water depth, followed by another 1000-point training set for inversion to obtain preliminary values. We gathered remote sensing reflectance data that corresponded to the same geographical coordinates as the water depth data and organized it into a tabular format. The initial column represents water depth, while the subsequent columns pertain to data from various bands, encompassing bands 1, 2, 3, 4, 5, 6, 8, and 10. We initiated the water depth retrieval based on control points linked to one of the 1000-point training sets. Subsequently, we employed this training set for inversion to derive the ultimate depth results. Ultimately, the final results obtained through online prediction were used to compute key evaluation metrics, including Mean Absolute Error (MAE), Mean Relative Error (MRE), Root Mean Square Error (RMSE), and the coefficient of determination (R2).
All data format conversions and experiments were carried out within the Matlab environment. For training points and verification points, we use random sampling method to extract samples. Our approach involved the random selection of calibration samples in accordance with the depth distribution. For each sample, we computed the MAE, MRE, RMSE, and R2 values by comparing the estimated water depth values with the ground-truth measurements. The ultimate results were presented as the mean values across all samples.
The results of water depth estimation exhibit significant variations among the different bathymetry algorithms employed. Notably, the accuracy of the Easy-DL model stands out as the highest among the three algorithms, followed by the Log-Linear model in second place, while the Stumpf model lags behind in terms of accuracy (Refer to Figure 3). These conclusions are substantiated by examining parameters such as the correlation coefficient, R2,MAE,MRE,RMSE.
For the Easy-DL model, the water depth inversion results closely align with the 1:1 line, with fewer discrete data points. In contrast, the Stumpf model exhibits the lowest accuracy, characterized by a higher degree of data discreteness in water depth inversion. Following this trend, the Log-Linear model falls in between the other two algorithms in terms of accuracy.
Notably, within the depth range of 0-3 meters, the Easy-DL model demonstrates a high degree of alignment with actual measurements, resulting in noticeably higher accuracy compared to the other two models. However, when the water depth exceeds 10 meters in the Easy-DL model, the retrieved values start to decrease slightly, deviating marginally from the measured water depth values (Refer to Figure 3).
Figure 4 presents a comprehensive map of estimated water depths across the study area, spanning depths from 0 to 15 meters. The results highlight variations in accuracy, notably showcasing lower accuracies in the shallow depths (< 0.5 meters) and the deeper depths (> 15 meters) within the study area, particularly in the proximity of the shoreline.
The topographic map derived from the Easy-DL model exhibits less noise, and the inversion results from shallow to deep waters closely mirror the actual conditions. An examination of the scatter map reveals a noticeably superior accuracy in the inversion of water depth compared to the other two models. When compared to the measured data, the topographic map derived from satellite data effectively captures the general trend of water depth variability, albeit with some minor discrepancies in the finer details.
In the 0-5 meter depth range, the inversion results of the three algorithms exhibit a similar trend, albeit with some localized variations. For instance, in specific areas, the Stumpf model manages to mitigate the influence of seabed geological heterogeneity on water depth inversion results, a feat not achieved by the Log-Linear algorithm. However, even though the Easy-DL model boasts high accuracy, it does exhibit errors in these regions.
Yet, it’s worth noting that the Stumpf model shows pronounced error bands in nearshore areas, which could potentially be attributed to wave-related factors. In the depth range of 6-10 meters, the water depth change trends appear consistent across models, but the Stumpf model contains more noise points in a triangular region compared to the smoother results from the Easy-DL model.
In locations exceeding 10 meters in depth, such as the circular section, the data from the Easy-DL model tend to underestimate water depth inversion results, consistent with the scatter plot observations. Collectively, these results underscore the reliability of satellite-based water depth estimation. However, it’s noteworthy that when the water depth in the Easy-DL model exceeds 10 meters, the inverted water depth values begin to exhibit a slight decline, deviating marginally from the measured water depth values.
5. Discussion
As illustrated in the scatterplot presented in Figure 3, our proposed method exhibits a remarkably high level of accuracy in water depth inversion. This becomes particularly evident when compared to two classical algorithms: the Stumpf algorithm and the Log-Linear algorithm. To provide a comprehensive assessment of bathymetry results across various water depth ranges, we have calculated the root-mean-square errors (RMSE) for both the classical methods and our proposed online deep learning method (see Table 1).
These methods enable precise water depth estimation under diverse conditions, encompassing factors such as human activities, pollution, and sediment accretion. It’s noteworthy that our proposed online deep learning method consistently outperforms all other methods in terms of overall accuracy, boasting an RMSE that is 0.24 meters less than the closest RMSE value among all other methods.
Moreover, the proposed online deep learning method not only excels in overall accuracy but also demonstrates superior performance in the inversion accuracy of specific water depth ranges. Notably, within the 6-9 meter range, our method achieves a remarkable level of accuracy, with an RMSE as low as 0.23 meters.In the case of the Stumpf algorithm, similar conclusions hold, where the RMSE is 0.94 meters, albeit slightly lower than the overall accuracy. Conversely, the Log-Linear algorithm exhibits its smallest error in the 3-6 meter water depth range, with an RMSE of 1.01 meters.
However, it’s important to acknowledge that when the water depth exceeds 9 meters, all algorithms tend to experience an increase in accuracy deviation and RMSE values, surpassing the overall results. This phenomenon can be attributed to the comprehensive approach employed in our method, where a variety of machine learning algorithms are integrated to perform depth inversion. This enables the attainment of optimal depth estimation overall, yielding superior results in localized estimations as well.
Given that the study area encompasses an open coast, it is susceptible to significant influences from various environmental factors. Remote sensing images reveal valuable insights into the seabed quality of the nearshore sea, suggesting relatively high water transparency in this region.
As depicted in Figure 5, the results obtained through the approach proposed in this paper exhibit substantial improvements compared to those obtained through traditional methods. These improvements are noticeable across the entire depth range under consideration, which spans from 0 to 15 meters, with a particularly noteworthy enhancement at a depth of four meters.
Additionally, it’s worth highlighting the histogram depicting the residuals, limited to ±1 meter, in comparison to the previous method. In this context, the distributions observed for all three methods appear to follow a normal pattern (see Figure 5). This reaffirms the feasibility and effectiveness of the method proposed in this paper.
6. Conclusion and Future Directions
In this paper, we presented an online water depth estimation method that employs a comprehensive approach. This method uses a general large model, combining remote sensing data with measured training datasets, and incorporates multiple machine learning algorithms. The results achieved with this approach in water depth inversion have been promising. Moreover, the use of the online ensemble learning algorithm clearly shows different water depth estimations. In comparison, ensemble learning techniques can be further integrated with these algorithms to improve depth estimation accuracy, often resulting in a halving of the RMSE. Within the experimental area, our proposed method has demonstrated superior precision, lower RMSE values, and higher R2 values when compared to the classical Stumpf and Log-linear algorithms. The experimental results indicate that the method can effectively improve depth estimation within the range of 0 to 11 meters, with an RMSE of 0.39 meters. Remarkably, for water depths less than 9 meters, the inversion accuracy is consistently high. The reduction in performance for depths exceeding 9 meters may be attributed to similar water quality conditions and substantial water depth, which might challenge the accurate reflection of depth changes through remote sensing reflectivity data.
It’s worth noting that while the quantity of training samples significantly impacts the performance of depth estimation, this paper’s algorithms are all based on a large volume of training data. Importantly, this method has the potential to be extended to estimate other physical parameters based on remote sensing image analysis, such as water turbidity and chlorophyll concentration. In summary, the method proposed in this paper effectively estimates water depth from satellite images by leveraging the synergy between publicly available large-scale models and remote sensing depth retrieval. This method outperforms traditional remote sensing depth retrieval approaches. Due to the non-parametric nature of machine learning methods, it successfully achieves relatively high coherence and consistency from observed satellite images compared to depth estimation through acoustic methods
Looking ahead, with the continuous advancement of large models, the method presented here, which involves invoking network online model APIs for remote sensing image processing, represents a promising direction in remote sensing applications. While many scholars have used remote sensing APIs for specific tasks in remote sensing image processing, the lack of an API for Satelite-based baythymetry is a challenge. Converting remote sensing data formats into the import and export formats of common online learning algorithms is a crucial step for future research and the widespread application of remote sensing online data processing.
Author Contributions
Zhongqiang Wu processed analysis and wrote manuscript. All authors reviewed and commented on the manuscript. Zhongqiang Wu and Haixia yang designed the algorithm with input from Wei Shen.The BATHYMETRY project was conceived by Zhihua Mao, who also obtained funding and collected the remote sensing data and Sonar data.
Data and Code Availability Statement
The data and codes supporting the findings of this study are at the provided link: https://github.com/wuzhenghan2022/ESAY-DL.git.
Acknowledgments
This work was supported in part by the Teaching Reform Research Project, Hainan Normal University, hsjg2023-07; in part by the National Natrual Science Foundation of China under Grant 61991454,in part by the the Oceanic Interdisciplinary Program of Shanghai Jiao Tong University under Grant SL2022ZD206, in part by the the Scientific Research Fund of Second Institute of Oceanography,MNR under Grant SL2302, and in part by the National Key Research and Development Program of China under Grant 2016YFC1400901.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Liu, Y.; Zhao, J.; Deng, R.; Liang, Y.; Gao, Y.; Chen, Q.; Xiong, L.; Liu, Y.; Tang, Y.; Tang, D. A downscaled bathymetric mapping approach combining multitemporal Landsat-8 and high spatial resolution imagery: Demonstrations from clear to turbid waters. Isprs J Photogramm 2021, 180, 65–81. [Google Scholar] [CrossRef]
- Cao, B.; Deng, R.; Zhu, S. Universal algorithm for water depth refraction correction in through-water stereo remote sensing. International Journal of Applied Earth Observation and Geoinformation 2020, 91, 102108. [Google Scholar] [CrossRef]
- Niroumand-Jadidi, M.; Legleiter, C.J.; Bovolo, F. River Bathymetry Retrieval From Landsat-9 Images Based on Neural Networks and Comparison to SuperDove and Sentinel-2. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing 2022, 15, 5250–5260. [Google Scholar] [CrossRef]
- Lyzenga, D.R. Passive remote sensing techniques for mapping water depth and bottom features. Applied optics 1978, 17, 379–383. [Google Scholar] [CrossRef] [PubMed]
- Lyzenga, D.R.; Malinas, N.R.; Tanis, F.J. Multispectral bathymetry using a simple physically based algorithm. Ieee Transactions on Geoscience and Remote Sensing 2006, 44, 2251–2259. [Google Scholar] [CrossRef]
- Brando, V.E.; Anstee, J.M.; Wettle, M.; Dekker, A.G.; Phinn, S.R.; Roelfsema, C. A physics based retrieval and quality assessment of bathymetry from suboptimal hyperspectral data. Remote sensing of Environment 2009, 113, 755–770. [Google Scholar] [CrossRef]
- Liu, Y.; Deng, R.; Qin, Y.; Cao, B.; Liang, Y.; Liu, Y.; Tian, J.; Wang, S. Rapid estimation of bathymetry from multispectral imagery without in situ bathymetry data. Appl Opt 2019, 58, 7538–7551. [Google Scholar] [CrossRef] [PubMed]
- Wu, Z.; Mao, Z.; Shen, W. Integrating Multiple Datasets and Machine Learning Algorithms for Satellite-Based Bathymetry in Seaports. Remote Sensing 2021, 13. [Google Scholar] [CrossRef]
- Traganos, D.; Poursanidis, D.; Aggarwal, B.; Chrysoulakis, N.; Reinartz, P. Estimating Satellite-Derived Bathymetry (SDB) with Google Earth Engine and Sentinel-2. Remote Sensing 2018, 10, 859. [Google Scholar] [CrossRef]
- Zhou, W.; Tang, Y.; Jing, W.; Li, Y.; Yang, J.; Deng, Y.; Zhang, Y. A Comparison of Machine Learning and Empirical Approaches for Deriving Bathymetry from Multispectral Imagery. Remote Sensing 2023, 15, 393. [Google Scholar] [CrossRef]
- Li, J.; Knapp, D.E.; Lyons, M.; Roelfsema, C.; Phinn, S.; Schill, S.R.; Asner, G.P. Automated Global Shallow Water Bathymetry Mapping Using Google Earth Engine. Remote Sensing 2021, 13, 1469. [Google Scholar] [CrossRef]
- Wen, C.; Hu, Y.; Li, X.; Yuan, Z.; Zhu, X.X. Vision-Language Models in Remote Sensing: Current Progress and Future Trends. arXiv 2023, arXiv:2305.05726. [Google Scholar]
- Hu, Y.; Yuan, J.; Wen, C.; Lu, X.; Li, X. RSGPT: A Remote Sensing Vision Language Model and Benchmark. arXiv 2023, arXiv:2307.15266. [Google Scholar]
- Zhang, J.; Zhou, Z.; Mai, G.; Mu, L.; Hu, M.; Li, S. Text2Seg: Remote Sensing Image Semantic Segmentation via Text-Guided Visual Foundation Models. arXiv 2023, arXiv:2304.10597. [Google Scholar]
- Chen, M.; Zhang, B.; Topatana, W.; Cao, J.; Zhu, H.; Juengpanich, S.; Mao, Q.; Yu, H.; Cai, X. Classification and mutation prediction based on histopathology H&E images in liver cancer using deep learning. NPJ precision oncology 2020, 4, 14. [Google Scholar] [CrossRef] [PubMed]
- Surisetty, A.K.V.V. Numerical modelling of Coastal and Nearshore processes in the vicinity of Shoreline Harbours with special reference to Visakhapatnam coast, India. 2012.
- Ruddick, K.; Vanhellemont, Q.; Dogliotti, A.; Nechad, B.; Pringle, N.; Van der Zande, D. New opportunities and challenges for high resolution remote sensing of water colour. Proceedings of the Ocean Optics XXIII, Victoria, BC, Canada 2016, 7. [Google Scholar]
- Vanhellemont, Q.; Ruddick, K. Acolite for Sentinel-2: Aquatic applications of MSI imagery. In Proceedings of the 2016 ESA Living Planet Symposium, Prague, Czech Republi, 2016; pp. 9–13. [Google Scholar]
- Dugan, J.; Morris, W.; Vierra, K.; Piotrowski, C.; Farruggia, G.; Campion, D. Jetski-based nearshore bathymetric and current survey system. Journal of coastal research 2001, 900–908. [Google Scholar]
- Stumpf, R.P.; Holderied, K.; Sinclair, M. Determination of water depth with high-resolution satellite imagery over variable bottom types. Limnology and Oceanography 2003, 48, 547–556. [Google Scholar] [CrossRef]
- Lyzenga, D.R. Shallow-water bathymetry using combined lidar and passive multispectral scanner data. International Journal of Remote Sensing 1985, 6, 115–125. [Google Scholar] [CrossRef]
Figure 1.
The general workflow of the proposed system for bathymetry from Sentienel-2 images.
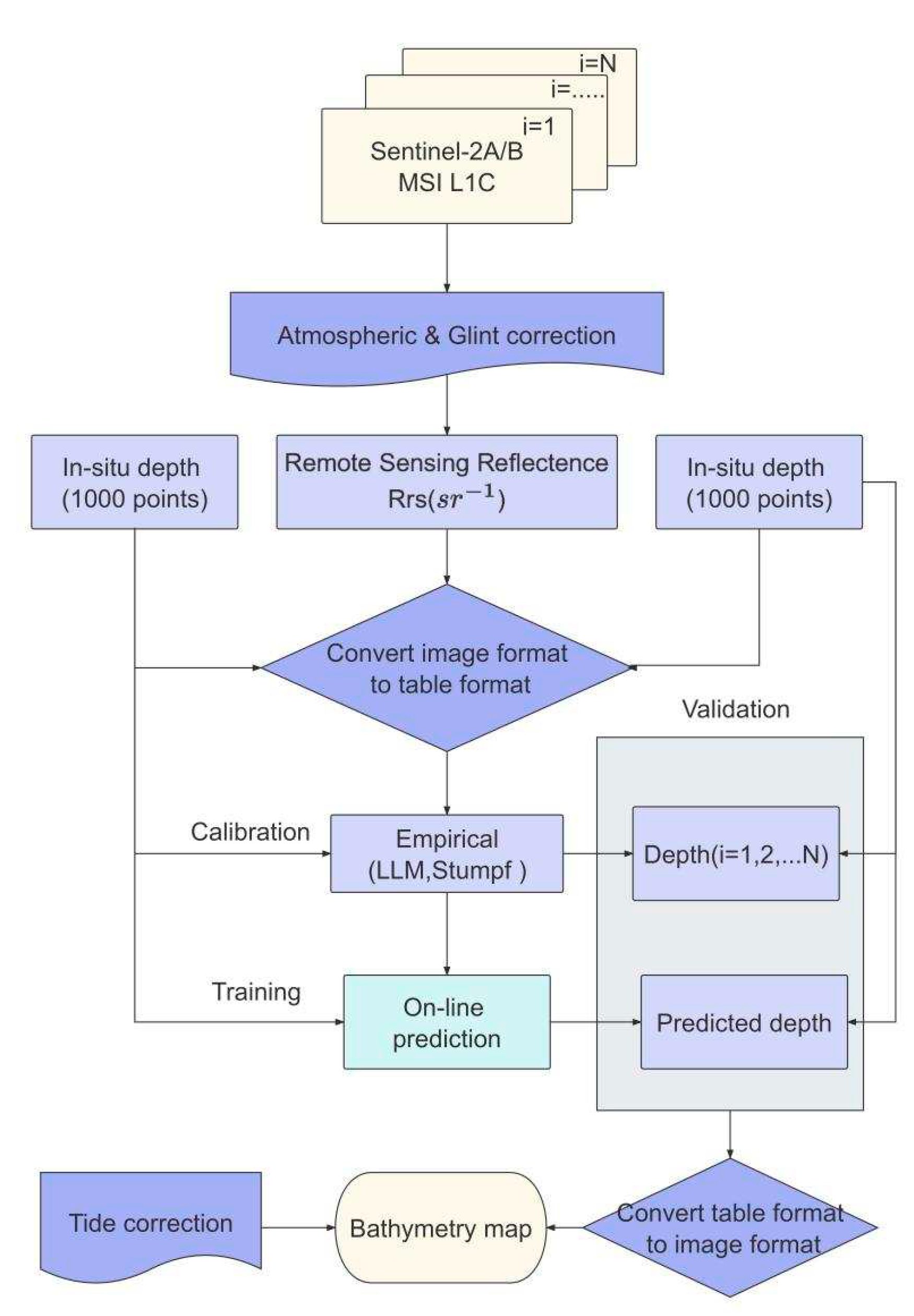
Figure 2.
The geographical location of the study area (a); the data collection area where the different colors represent the variations of the in-situ depth data (b).
Figure 2.
The geographical location of the study area (a); the data collection area where the different colors represent the variations of the in-situ depth data (b).
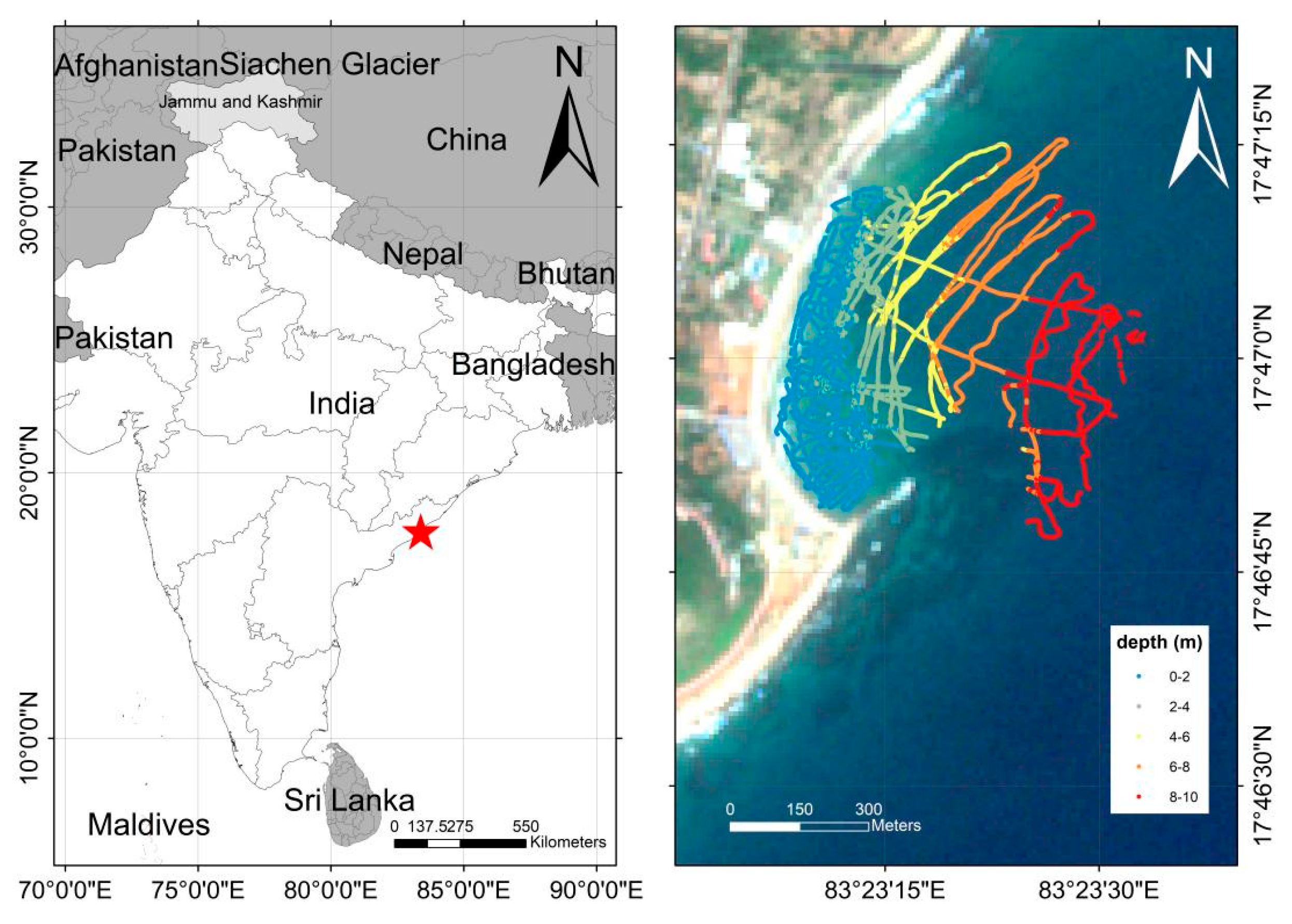
Figure 3.
Correlation between the in-situ depths and the depth results based on different bathymetry method: (a) Stumpf Model; (b) Log-Linear Model (c) Easy-DL Model.
Figure 3.
Correlation between the in-situ depths and the depth results based on different bathymetry method: (a) Stumpf Model; (b) Log-Linear Model (c) Easy-DL Model.
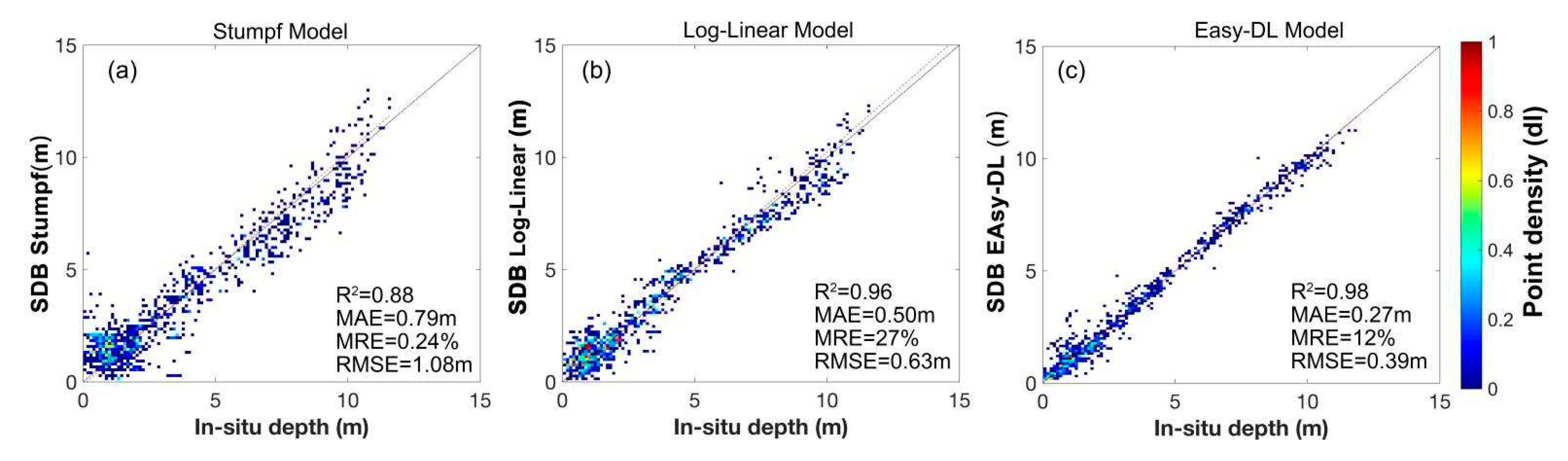
Figure 4.
The water depth map estimated based on satellite image data and different bathymetry method (a) Stumpf Model; (b) Log-Linear Model (c) Easy-DL Model.
Figure 4.
The water depth map estimated based on satellite image data and different bathymetry method (a) Stumpf Model; (b) Log-Linear Model (c) Easy-DL Model.
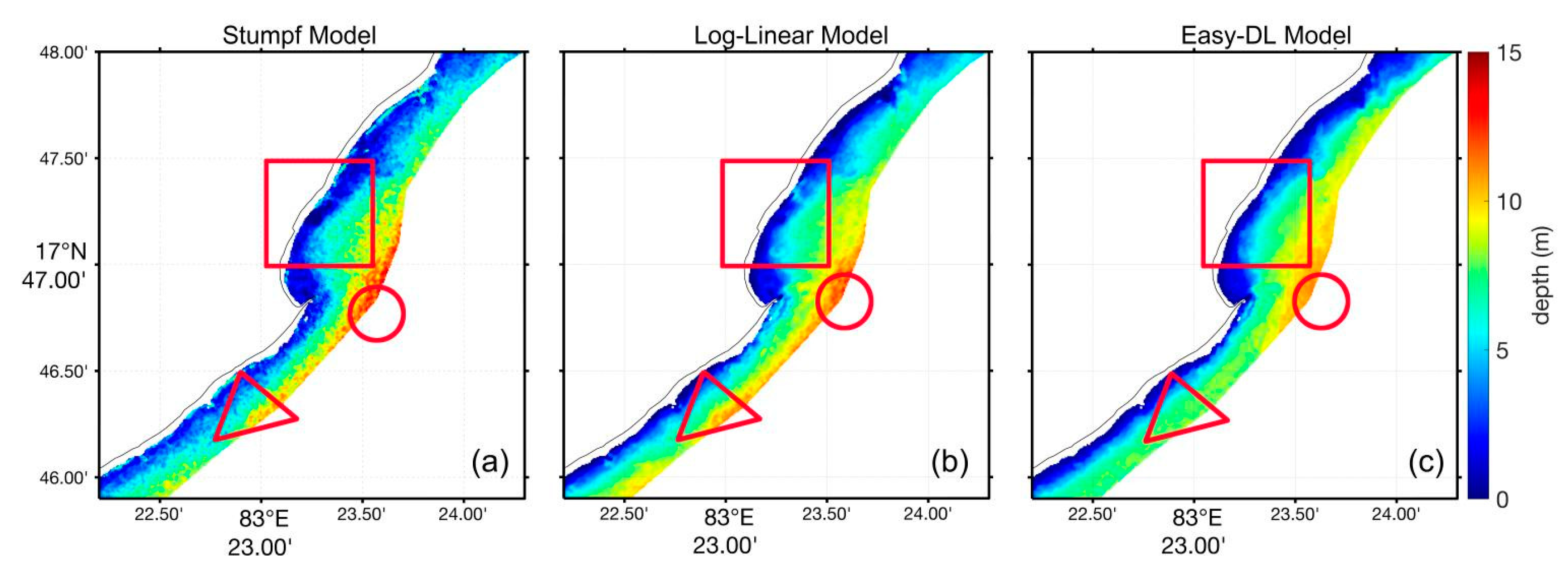
Figure 5.
The histogram map of the residual error obtained from different method.
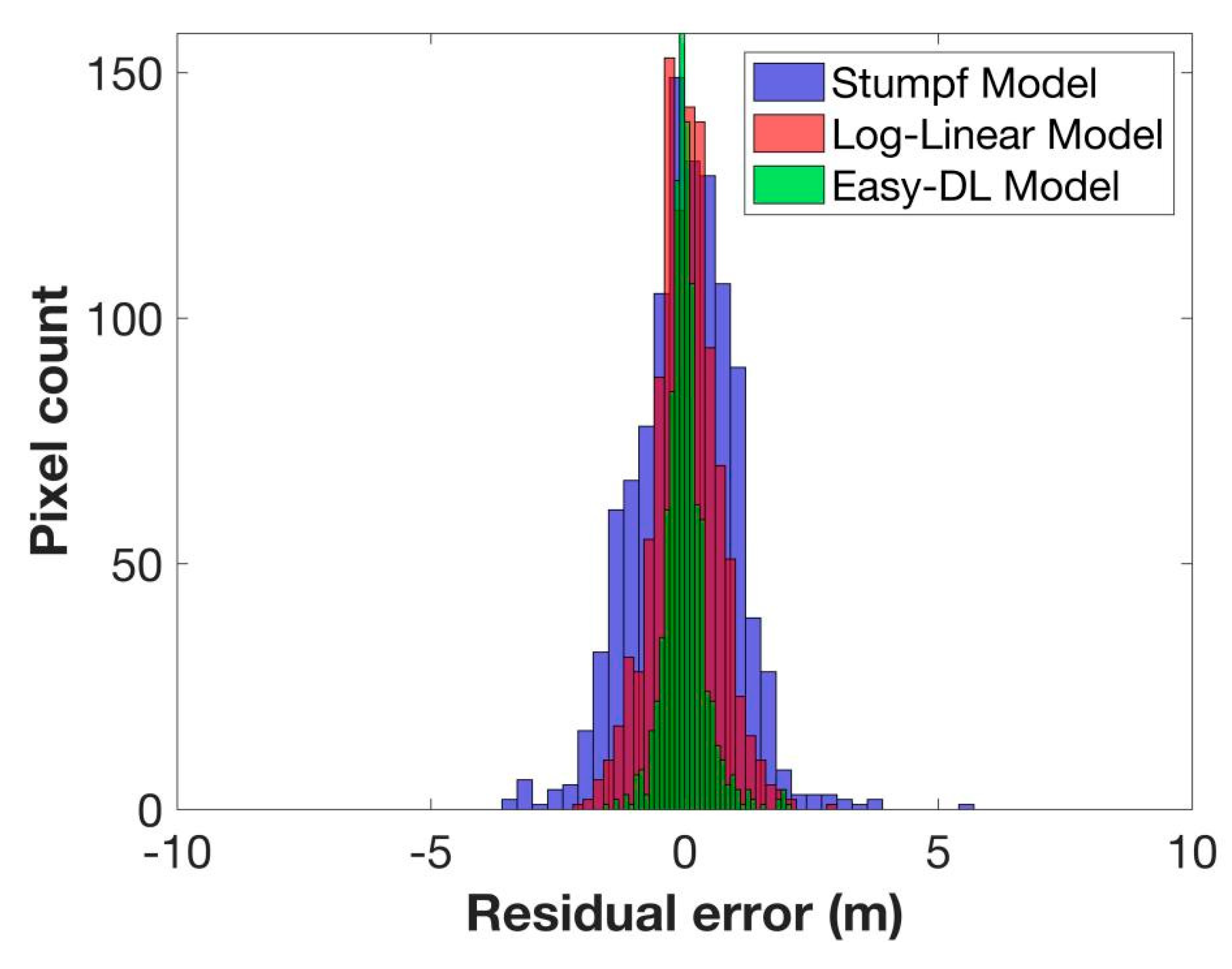

Table 1.
A comparison of the RMSE errors for different water depths and different bathymetry methods.
Table 1.
A comparison of the RMSE errors for different water depths and different bathymetry methods.
| Training Method | RMSE | ||||
|---|---|---|---|---|---|
| 0-3m (580points) | 3-6m (214points) | 6-9m (200 points) | >9 m(95points) | overall(1089points) | |
| Stumpf | 1.12 | 1.01 | 0.94 | 1.19 | 1.08 |
| Log-Linear | 0.59 | 0.58 | 0.66 | 0.89 | 0.63 |
| Easy-DL | 0.43 | 0.29 | 0.23 | 0.39 | 0.39 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



