
Submitted:
23 August 2023
Posted:
24 August 2023
You are already at the latest version
Abstract
According to the cognitive radio (CR) paradigm, the efficient use of the radio spectrum is achieved by performing four main functions: spectral perception, spectral mobility, decision-making, and cooperation. In this work, a multivariable algorithm that considers geographic mobility (GM) is presented. The decision-making process includes a feedback mechanism for the dynamic selection of reservation channels in a wireless network with cognitive capabilities. Geographic mobility plays a crucial role in how radio takes advantage of its environment; however, it has been scarcely explored in the literature.
In the present work, geographic mobility tests were carried out involving the interaction of CR and primary users (PU), where a measurement of the latency time of the proposed algorithm called: Algorithm for Decision-Making with Geographic Mobility (ATDeMoGeo) was evaluated and compared with other algorithms such as: Dijkstra's Algorithm, Analytic Hierarchical Process (AHP), Fuzzy Analytic Hierarchical Process (FAHP) and Decision-Making Algorithm with Modified Dijkstra (ATDDiM).
It was found that the proposed algorithm is robust and that it considerably reduces the latency time to accurately determine the best communication channels, thanks to the decision-making function implemented to establish which channels the CRs can occupy. For the selection of the best reserve channels, a series of criteria were considered, such as: signal-to-interference plus noise ratio (SINR), bandwidth (BW), probability of channel availability (AP), estimated channel time of availability (ETA) using the random waypoint mobility model (RWPM). These criteria are evaluated for two types of service, i.e., real time (RT) and best effort (BE). For the evaluation and validation of the ATDeMoGeo algorithm, a network with cognitive characteristics in NS-3 was simulated. The simulation scenarios consisted of a base station (BS) with mobile CRs and PUs. Based on the previous criteria, i.e., BW, SINR, AP and ETA, the BS assesses the spectrum occupancy information obtained by the CRs. The results show that the proposed algorithm can be used without problem for the proposed scenarios with higher speed and accuracy for the selection of better communication channels.
Keywords:
Cognitive-Radio
; Decision-Making
; Geographic Mobility in Cognitive Radio
; Location and Handover Management
1. Introduction
Geographic mobility (GM) models describe the movement of nodes in a specific region during a given time, which can include changes in speed, direction, and acceleration. Thus, GMs can be adapted to the specific needs of a solution, providing better performance and flexibility. In the use of wireless networks, two important tasks are considered: location and handover management. Location management ensures that the location of network nodes is tracked, while handover management is responsible for maintaining connections while a node moves from one network to another [1]. This GM management needs to be considered for cognitive radio networks (CRN), because the available radio spectrum can change considerably with location and handover. Consequently, user GM represents a major challenge in CRN [2] since it can significantly affect its performance by causing interruption of services and thus reducing the quality of service.
This proposal includes a detailed analysis of decision-making when geographic mobility is considered, which is a parameter that has not been explored in depth in most cognitive radio network proposals. According to the state of the art, existing mobility models can be divided into four groups: random, group, route-planned and time-dependent models [3]. Random mobility models in wireless networks consider the random distribution of nodes within a previously defined simulation area. Each node remains in that location for a randomly selected time within a specified interval [4,5]. In a similar way, the group mobility model considers that a group of nodes in a network move together around a common point [6,7]. Route-planned models seek to avoid unforeseen changes in speed and direction. The planning of the movements is defined by mathematical equations, where the nodes are forced to follow these movement patterns [8]. Similarly, time-dependent mobility models are based on mathematical equations where the nodes depend on an initial time with respect to a previous time, thus avoiding sudden changes in speed and direction [9].
There are different prediction schemes that can be used to control GM. For an implementation in CRN, it is a question of finding the best GM prediction technique, to select the most stable path for communication, thus, improving the general performance and the reliability relation with respect to performance.
This research work focuses particularly on decision-making and based on this; a study is made of the different mechanisms for decision-making that includes GM with the following contributions:
- ▪
- Development of a robust process that reduces the latency time to find a better communication channel.
- ▪
- A feedback function that increases the precision in the selection of a better communication backup channel, based on historical data of behavior in the network, through a feedback process that considers information from the evaluations of the previously used channels. Thus, the value assigned to each channel corresponds to a relationship between the current information and previous evaluations.
The evaluation process of the proposed algorithm is based on determining the attributes that characterize a communication channel through the Delphi method [10]. The decision-making attributes were proposed from the parameters reported in the CR literature and compared with [10]. The execution of the tests was carried out with the NS-3 simulator, and to contrast ATDeMoGeo some comparisons are made with other algorithms based on: Dijkstra, Modified Dijkstra Decision-Making Algorithm (ATDDiM), Analytical Hierarchy Process (AHP) and Fuzzy Analytical Hierarchical Process (FAHP), where the results indicate that the processing time of the proposed algorithm decreases considerably. In addition, there is greater precision in the selection of a communication channel, since the feedback process proposed in the algorithm has the information of the evaluations of the current and previous channels. According to the analysis of the different mobility models that can be considered with the interaction among the CRs and PUs, it was possible to determine which mobility model would be appropriate for this scenario. This is based on sets of given data that can be compared with wireless networks in operation such as a cellular network. The characteristics that were considered to determine the movement of users are: speed, acceleration, pause time and time in a location.
The rest of the article is organized into the following sections. In Section 2, the related works are described. In Section 3, the description of the proposed decision-making algorithm is shown. Section 4 shows the tests carried out, which consider comparison of latency times with similar algorithms and mobility tests. Finally, Section 5 presents the conclusions.
2. Related work
Few works can be found in the literature that propose the study of GM in CRN and the solution to the problems associated with geographic mobility. The proposal presented by Zoran Damljanović [11] makes the DSA, in the network layer, where it establishes different CR layers, for the control of connections. However, this architecture does not consider the transfer delay in the spectrum and the continuity of the services when there is GM. Emma Trigui et al. [12] propose a mobility management of the CRN although the handling of the transfer delay and the speed is not considered. Arif Obaid et al. [13] use the random waypoint mobility model, where nodes move independently towards a randomly chosen destination with a randomly selected speed. S. Deva Priya and N. Kannan [14] propose to establish cellular regions that consider geographic data records as location history, if the mobility of the RC is habitual, a set of states of the user's current trajectory are taken into account, and these states can be represented in a transition matrix that is formed using Markov chains. Regarding Y. Zhao et al. [15], the authors propose a strategy that combines a prediction algorithm for both the spectrum and user mobility, to obtain detection information on the future location of each secondary user, organizing high-quality channels for secondary users with anticipation. According to Irfan Hanif et al. [16] a dynamic strategy according to the traffic pattern of the primary user can be adopted, for this, a follow-up of the mobility patterns of a certain primary spectrum is defined and these spectrum channels are classified according to how the primary accesses them. The handover strategy decision is based on these classified patterns which can follow a proactive or a reactive strategy. The study made by Jasrina Jaffar et al. [17] proposes a spectrum decision framework based on the mobility of secondary users to capture spectrum opportunities that vary in time and location. It is shown that a proactivity-based scheme has a better efficiency in network performance as long as the CR knows its current location and its future movement. The work proposed by Eldin et al. [18] introduces a channel assignment algorithm for secondary users that adapts the modulation level to generate N regular TDMA channels. The base station opportunistically exploits any available channel, based on the feedback information it receives from a reliable channel that includes the occupancies of the different SUs, in addition to the estimated SINR for different channels. On the other hand, Joseph Tlouyamma and Mthulisi Velempini [19] propose a channel selection algorithm to efficiently use the spectrum from the probabilities of channel inactivity, where a learning algorithm estimates the pattern of use of the channel and searches for idle channels with minimal delay. Prabhat Thakur et al. [20] consider concurrent spectrum testing and prediction techniques in their work to improve mobility performance and spectrum handover. Meanwhile, Prince Semba and Mai Trung [21] show a scheme where mobility is characterized by the period of inactivity and a predicted probability, which is associated with the channel that can be chosen to continue with the transmission of information in the mobility process. Feng Li et al. [22] propose a method based on Deep Learning for the prediction of user mobility, using a Preferential Exploration and Return model as a deep learning technique in order to predict the future locations of the nodes. On the other hand, Joseph Tlouyamma and Mthulisi Velempini [23], carry out a study that focuses on the design of a channel selection algorithm, the process considers an ordering in the descending order of the probabilities of channel inactivity, thus the grouping of channels ensures that channels are detected simultaneously.
According to Ayesha Iftikhar et al. [24] proposal, a decision-making algorithm using Game Theory is presented to model the spectral mobility, which serves as a switching game which considers whether to change or remain in the channel. In the case of Emmanuel Alozie et al. [25], it is proposed a strategy to minimize the delay that occurs during the handover of the spectrum, from a backup channel selection scheme based on fuzzy data; Basically, the proposed scheme considers gathering backup channels in advance and using fuzzy logic for the selection of the best channel among the available backup channels. Emna Trigui et al. [26] propose a GM scheme for CR, considering cellular networks, where each zone has its own functionality characteristics. The great challenge of this scenario is to allow users to move from one area to another without problems. Other studies have addressed the issue of user GM in solving CR problems, such as the congestion control proposed by Anwer Al-Dulaimi et al. [27] and the opportunistic programming in the spectrum proposed by Li Zhang et al. [28], without solving the problem of an effective transfer, nor considering a decision-making process that can help cognitive radio communication processes when there is GM.
As it can be seen, there is a great diversity of proposals that consider mobility strategies, but do not solve the problem of effective transfer, nor do they consider decision-making that can help cognitive radio communication processes when there is GM. In order to have a point of view in relation with the latency time of the algorithm, the development of other algorithms such as: Dijkstra, AHP, FAHP and ATDDiM is included for the comparison process.
3. Algorithm Description
This proposal is based on the weighted sum shown in (1), which is part of a conventional technique for solving multi-objective optimization problems [29]. To find a better channel in a CR environment, with the efficiency and simplicity of using the linear combination of weights, some attributes such as signal-to-interference plus noise ratio (SINR), bandwidth (BW), probability of channel availability (AP), channel estimated channel time of availability (ETA) are evaluated using the random waypoint mobility model (RWPM). These criteria are considered for two types of services, i.e., real time (RT) and best effort (BE). In addition, the attributes are compared with those considered in [2] with a calculation of the weights to evaluate the channels that provide the best performance.
Equation 1 shows the objective function and the attributes used for the analysis of the communication channels.
where: w ∈ [0, 1] and fj(x) is the jth objective function.
Considering that it is desired to determine the channel with the best 'fitness'/'aptitude', applying (2),
where:
i: id-number of one of the N channels to be compared
ts: type of service (RT or BE)
BW, SINR, AP y ETA: values of the attributes detected by the CR for channel i
: assigned weight to BW depending on the selected ts
: assigned weight to SINR depending on the selected ts
: assigned weight to AP depending on the selected ts
: assigned weight to ETA depending on the selected ts
The values of BW, SINR, AP and ETA, detected by the CRs, must be normalized to perform the weighted sum of the multiple objectives, and this sum is called the 'objective function'. In this way, all the objective functions 'aptitudes' of the 'N' channels to be compared are obtained, thus computing a 'global maximum' among the set of channels and determining which channel has the optimal characteristics for communication. Figure 1 shows the flowchart of ATDeMoGeo operation. Note that the input values are the 'service type' (ST) and the number of channels to compare (N).
The 'type of service' used consists of RT or BE, where the selected values are shown in Table 1, which are values like [2] in order to compare the performance. Initially, for the value to be optimized of the 'best channel', a channel is placed that is not within the range of channels to be analyzed and determine a channel within the range of channels. If, at the end of the proposed algorithm, the value of the 'best channel' is outside the range of channels, the algorithm will not be able to determine a channel with the best 'fitness'. The 'global maximum' value starts with a value of 0, which is the 'fitness' and represents that it will never have a channel analyzed, guaranteeing that the 'global maximum' value is modified at least once. Within the cycle shown in Figure 1, the 'objective function' for each channel is determined; a value called 'local maximum', which is compared with the value that has 'global maximum'. If the value is greater, then 'global maximum' takes the value of 'local maximum' and 'best channel' assumes the value of the channel that is currently analyzed. If the value is lower, the analysis of the next channel continues, without modifying the values of 'best channel' and 'global maximum'. It can be seen in the flowchart that this repetitive cycle continues until there are no more channel 'fits' to calculate, which is controlled by the 'channel' variable. Once the channel comparison cycle is complete, the output values with the 'best channel' and 'global maximum' determined by ATDeMoGeo are displayed.
At this point, a feedback mechanism is implemented to improve the accuracy with which a channel with the best communication characteristics can be determined. This procedure allows to consult the history of previous results. Next, the process to be carried out to improve the precision in the selection of a channel is described.
3.1. Feedback-Decision-Making Algorithm with Geographic Mobility (ATDeMoGeoR)
The feedback-decision-making algorithm with geographic mobility (ATDeMoGeoR), considers increasing the accuracy in the selection of the best channel in a similar way to [30]. The feedback process has the information from the evaluations of the channels carried out previously. The value assigned to each channel corresponds to a relationship between current information and past evaluations. As it can be seen in Figure 2, the ATDeMoGeoR is based on the original ATDeMoGeo but with a feedback process, as shown below.
To determine the new 'best channel', a process is carried out that considers the current value, the last generated value, and the average value of a certain time interval. The final value for each channel is determined using (3).
where:
i: id-number of one of the N channels to be compared.
SF: final value
SA: current value
SPa: previous value
SPr: mean value
α, β ∈ [0, 1]
Once the final value is obtained for each channel, the comparison is made with the decision-making process outlined above and thus determines the best channel among the set of channels analyzed. The values of α and β are obtained in a similar way as in [30] by performing an experimental auto-regressive analysis with different combinations of α and β, for a set of predetermined data. The values of α and β were taken, such that the precision in the selection of the best channel was higher. These values are α = 0.60 and β = 0.35, with an experimental precision of 87%. Both algorithms were analyzed with the two types of services: RT and BE and with normalized weights.
4. Tests and analysis of results
The algorithm proposed in this work for decision-making called ATDeMoGeo, has the characteristic of improving the response time (latency). The test scenario for the evaluation and validation of ATDeMoGeo and ATDeMoGeoR, were configured with the services of RT and BE using the Network Simulator 3 (NS-3). The characteristics of the network are shown in Table 2, where it is considered that a Base Station (BS), with cognitive radio characteristics, receives all the information detected by the CRs, i.e., the main characteristics and attributes of the channels that they have observed and selected during previous analyses, which are: BW, SINR, AP and ETA and within the range of channels that can be detected by the system. Initially, the behavior of the proposed algorithms ATDeMoGeo and ATDeMoGeoR, with and without feedback mechanism, in a scenario with GM where there is interaction of Cognitive Radios (CR) and Primary Users (PU) is considered, as shown in Figure 3. Subsequently, the latency time in relation to ATDeMoGeo is obtained and compared with the Dijkstra [32], AHP [33], FAHP [34] and ATDDiM [35] algorithms. Finally, the results obtained for ATDeMoGeo are shown and compared with the feedback mechanism of ATDeMoGeoR.
4.1. Simulation scenario with geographic mobility
In Figure 3, an approximation of the geographical positions of the base station (BS), primary users (PUs) and cognitive radios (CRs) is shown. In addition, considering that the decision-making algorithm is developed by the BS and, therefore, it assesses the selection of the best communication channel and establishes which channels the CRs can occupy. The mobility pattern followed by the CRs and PUs is defined by the random way-poin mobility model (RWPM) [31]. Consequently, the behavior of the CRs and PUs is modeled and simulated using 124 randomly distributed nodes on a circular surface with a radius ranging from 2167m to 4334m, where each node is assigned a transmission channel. Finally, mobility simulation time has a duration of 3600s.
In this evaluation, three GM scenarios with different occupancy percentages were generated for each channel, where values between 25% and 75% were considered in intervals of 25%. For each of these three scenarios, three variations in the mobility of the PUs were proposed by modifying the mobility radius of the PUs, in relation to the coverage radius of the BS. That said, the following distances were considered:
- ▪
- Same as the coverage radius of the BS, i.e., 2167m
- ▪
- 50% greater than the coverage radius of the BS, i.e., 3250.5m
- ▪
- 100% greater than the coverage radius of the BS, i.e., 4334m
According to the simulation results, the average time that a channel is available was obtained. For the proposed scenario, a simulation time of approximately 1.48s corresponding to 2400 simulation samples is defined. Table 3 shows the results obtained from the proposed GM algorithm, they were obtained with and without the feedback mechanism. Note that in the selection of the best channel there is a similarity above 75% for the different mobility distances.
Therefore, the use and implementation of the algorithm will depend on the scenario where they are tested.
4.2. Comparison of the Decision-Making Algorithm with Geographic Mobility
In addition, for the purpose of comparison with existing algorithms, similar attributes are considered as the ones presented in [2]. For the first part of the tests, the latency of the computational computation corresponding to the algorithms is obtained: Dijkstra [32], AHP [33], FAHP [34], ATDDiM [35] and ATDeMoGeo using channels generated pseudorandomly with a triangular distribution with values between 3 and 38 for ETA, from 33 to 98 for AP, from 0 to 10 for SINR, and a single value of 200 for BW. In Figure 4 it can be seen that ATDeMoGeo has a low latency with respect to the other algorithms for 200 channels, which indicates that the time to indicate the best channel is the lowest with respect to the other algorithms.
It should be noted that, each of the points shown in Figure 4, were obtained with an average of 100 repetitions of algorithms with different inputs. Then, the latency for each set of channels to be compared is calculated. Figure 5 shows the percentage of time of the proposed algorithm ATDeMoGeo, with respect to the other algorithms evaluated. Note that the decision-making time for ATDeMoGeo is significantly reduced by 94.27% compared to Dijkstra, 71.84% compared to AHP, 21.42% compared to FAHP, and 12.77% for ATDDiM.
4.3. Feedback-Decision-Making Algorithm with Geographic Mobility
According to the results obtained above, and in order to validate the performance of the proposed algorithm, a comparison between ATDeMoGeo and ATDeMoGeoR has been developed, i.e., with and without considering the feedback mechanism. Figure 6 shows the number of channels with their respective latency, which initially considers two channels, then 20 channels, and subsequently increases from 20 to 20 channels until reaching 200 channels.
Figure 7 shows the confidence intervals with a level of 95% for 200 analyzed channels. Channels were randomly generated using a triangular distribution with values from 3 to 38 for ETA, 33 to 98 for AP, 0 to 10 for SINR, and a single value of 200 for BW. Then, to obtain the confidence interval and determine which channel is the best with respect to the proposed algorithm with and without the feedback process, the averages of 100 repetitions were computed for each of the proposed algorithms with different inputs.
In addition, Figure 7 shows that the latency time of the proposed algorithm with ATDeMoGeoR feedback increases on average nine times with respect to the latency time of the proposed algorithm without ATDeMoGeo feedback, this is due to the mechanism that is carried out in the feedback to check the previous state of the current channel. Consequently, according to the results, it can be suggested that the ATDeMoGeo algorithm with feedback mechanism is useful in cases where the processing time is not an important factor when determining a channel with the best communication characteristics and having, as greater relevance, the results in the new determination of a better communication channel. Table 4 shows the results of the compared channels, which indicates that there is a 95% confidence level in the latency time it takes to select the communication channel.
4. Conclusions
This article shows a novel proposal that considers multivariable decision-making for Cognitive Radio (CR) and Geographic Mobility (GM). It can be observed that, in the consulted literature, there are different alternatives focused on better channel assignment times that need to be used when the GM of a CR is assessed, which allows establishing the areas of opportunity that are available for its analysis.
Using the GM information in a cognitive radio network (CRN) is very helpful in several aspects such as: reducing the number of secondary users that are working on the network and considerations for the transmission of information where the quality of service is affected. After consulting the literature, it can be seen that one of the main problems presented by a CRN is decision-making, as it is an important stage in the set of operations necessary for the operation, such as: detection (spectral perception), spectral mobility, decision-making, cooperation and coordination. With this, the Algorithm for Decision-Making with Geographical Mobility (ATDeMoGeo), comes to strengthen this stage.
The ATDeMoGeo showed, through simulations tests, to be superior in reducing the processing time, unlike the algorithms that had been proposed in CRN; in addition to an analysis that considers the GM is proposed. By showing that ATDeMoGeo decreases processing time, a modification to the algorithm was developed using a feedback mechanism, called in this research work as Feedback-Decision-Making Algorithm with Geographic Mobility (ATDeMoGeoR). The ATDeMoGeoR was designed and implemented with the purpose of improving not only the latency time in decision-making, but also the quality of the selection of the best channel according to the parameters of: bandwidth (BW), signal-to- interference plus noise ratio (SINR), probability of channel availability (AP) and estimated channel time of availability (ETA), also considering the history of previous results in the new decision of the best communication channel. As it can be seen in the execution tests, the processing time of ATDeMoGeoR increased on average nine times that of ATDeMoGeo. But this processing time is still sufficiently less than the minimum sampling time, i.e., 0.25s, that the NS-3 simulator can perform, which means that ATDeMoGeoR could be used without any problem for the proposed simulation scenarios without detecting a significant change in the network. Based on the previous statements, it can be concluded that ATDeMoGeo and ATDeMoGeoR are algorithms that can be optimally implemented in a CRN, being a proposal that has proven to be viable by having practical aspects for decision-making, through the scenarios proposed in this research work. The ATDeMoGeo and ATDeMoGeoR, proved to be useful depending on the environment in which they are to be implemented, for this reason it was possible to test them in scenarios under the same GM conditions and network occupation by the PUs. This demonstrates that these algorithms are similar in 75% in the selection of the best communication channel, for the 2400 samples per scenario that are considered.
[M1]References should be numbered in order of appearance. We detected “Ref 32” appears before “31”, please rearrange all the references to appear in numerical order.
Acknowledgments
This project has been supported by grants awarded by the PRODEP program of the Mexican Secretariat of Public Education (SEP) and the National Council of Science and Technology (CONACyT).
Conflicts of Interest
The authors declare that there is no conflict of interests regarding the publication of this paper.
References
- Zubair, S.; Yusoff, S.K.S.; Fisal, N. Mobility-Enhanced Reliable Geographical Forwarding in Cognitive Radio Sensor Networks. Sensors 2016, 16, 172. [Google Scholar] [CrossRef] [PubMed]
- Hernandez, C.; Salgado, C.; López, H.; Rodriguez-Colina, E. Multivariable algorithm for dynamic channel selection in cognitive radio networks. EURASIP J. Wirel. Commun. Netw. 2015, 2015, 216. [Google Scholar] [CrossRef]
- H. R. N. A. A. S. M. H. A. a. M. A. K. Wheeb. Topology-Based Routing Protocols and Mobility Models for Flying Ad Hoc Networks: A Contemporary Review and Future Research Directions. Drones 2022, 6, 28. [Google Scholar]
- K. -H. C. a. N. Shenoy, A 2-D random-walk mobility model for location-management studies in wireless networks. IEEE Transactions on Vehicular Technology 2004, 53, 413–424. [Google Scholar] [CrossRef]
- D. R. D. R. A. S. M. G. José Arnaldo Filho. Satisfactory video dissemination on FANETs based on an enhanced UAV relay placement service. Annals of Telecommunications 2018, 9, 601–6012. [Google Scholar]
- G. A. S. K. S. Subodh Kumara. Impact of Mobility on MANETs Routing Protocols Using Group Mobility Model. Wireless and Microwave Technologies 2017, 2, 1–12. [Google Scholar]
- S. K. J. W. R. K. Upadhyay. Performance of MANET Routing Protocols with Varying Mobility Speed and Group Mobility Model. Vidyabharati International Interdisciplinary Research Journal 2021, 28–32. [Google Scholar]
- Liu, X.; Du, X.; Zhang, X.; Zhu, Q.; Guizani, M. Evolution-algorithm-based unmanned aerial vehicles path planning in complex environment. Comput. Electr. Eng. 2019, 80, 106493. [Google Scholar] [CrossRef]
- K. R. R. K. V. M. Nagaraju. Efficient way of implementing the random and GM (Gauss-Markov) mobility model in MANET. International Journal of Engineering & Technology 2018, 7, 270–273. [Google Scholar]
- Egfjord, K.F.-H.; Sund, K.J. A modified Delphi method to elicit and compare perceptions of industry trends. MethodsX 2020, 7, 101081. [Google Scholar] [CrossRef]
- Z. Damljanovi/'c. Mobility management strategies in heterogeneous cognitive radio networks. Journal of Network and Systems Management 2010, 18, 4–22. [Google Scholar] [CrossRef]
- Trigui, E.; Esseghir, M.; Merghem-Boulahia, L. A mobility scheme for cognitive radio networks. 2013 12th Annual Mediterranean Ad Hoc Networking Workshop (MED-HOC-NET). LOCATION OF CONFERENCE, FranceDATE OF CONFERENCE; pp. 97–102.
- Obaid, A.; Fernando, X.; Jaseemuddin, M. A mobility-aware cluster-based MAC protocol for radio- frequency energy harvesting cognitive wireless sensor networks. IET Wirel. Sens. Syst. 2021, 11, 206–218. [Google Scholar] [CrossRef]
- N. K. S. Deva Priya. Enhanced spectrum aggregation based frequency-band selection routing protocol for cognitive radio ad-hoc networks. Concurrency and Computation: Practice and Experience 2018, 31, 4911. [Google Scholar]
- Z. H. Y. L. G. W. Yanxiao Zhao. Prediction-Based Spectrum Management in Cognitive Radio Networks. IEEE Systems Journal 2018, 12, 3303–3314. [Google Scholar] [CrossRef]
- M. Z. A. A. Irfan Hanif. Traffic Pattern Based Adaptive Spectrum Handoff Strategy for Cognitive Radio Networks. de 2016 10th International Conference on Next Generation Mobile Applications, Security and Technologies (NGMAST), 2016.
- S. K. S. Y. N. A. J. C. M. Jasrina Jaffar. Location Assisted Proactive Channel in Heterogeneous Cognitive Radio Network. Journal of Telecommunication, electronic and computer engineering 2016, 8, 49–53. [Google Scholar]
- M. S. H. M. E.-T. Ala Eldin Omer, «An Adaptive Channel Assignment Approach for Streaming of Scalable Video over Cognitive Radio Networks,» de 2016 UKSim-AMSS 18th International Conference on Computer Modelling and Simulation, 2016.
- M. V. Joseph Tlouyamma. Channel Selection Algorithm Optimized for Improved Performance in Cognitive Radio Networks. Wireless Personal Communications 2021, 119, 3161–3178. [Google Scholar] [CrossRef]
- Thakur, P.; Kumar, A.; Pandit, S.; Singh, G.; Satashia, S. Spectrum mobility in cognitive radio network using spectrum prediction and monitoring techniques. Phys. Commun. 2017, 24, 7692630. [Google Scholar] [CrossRef]
- Yawada, P.S.; Dong, M.T. Intelligent Process of Spectrum Handoff/Mobility in Cognitive Radio Networks. J. Electr. Comput. Eng. 2019, 2019, 1–12. [Google Scholar] [CrossRef]
- Li, F.; Sun, Z.; Lam, K.-Y.; Sun, L.; Shen, B.; Peng, B. 2022.
- Tlouyamma, J.; Velempini, M. Channel Selection Algorithm Optimized for Improved Performance in Cognitive Radio Networks. Wirel. Pers. Commun. 2021, 119, 3161–3178. [Google Scholar] [CrossRef]
- Iftikhar, A.; Rauf, Z.; Khan, F.A.; Ali, M.S.; Kakar, M. Bayesian game-based user behavior analysis for spectrum mobility in cognitive radios. Phys. Commun. 2018, 32, 200–208. [Google Scholar] [CrossRef]
- Alozie, E.; Nasir, F.; Oloyede, A.; Sowande, O.; Imoize, A.; Abdulkarim, A.; Garba, S. Intelligent Process of Spectrum Handoff in Cognitive Radio Network SLU. Journal of Science and Technology 2022, 4, 205–218. [Google Scholar]
- M. E. L. M.-B. E. Trigui, «A mobility scheme for cognitive radio networks,» de 2013 12th Annual Mediterranean Ad Hoc Networking Workshop (MED-HOC-NET), 2013.
- S. A.-R. J. C. A. Al-Dulaimi, «Adaptive congestion control for mobility in cognitive radio networks,» de 2011 Wireless Advanced, WiAd 2011, 2011.
- K. Z. P. M. L. Zhang, «Opportunistic spectrum scheduling for mobile cognitive radio networks in white space,» de 2011 IEEE Wireless Communications and Networking Conference, WCNC 2011, 2011.
- L. S. X. Z. R. C. C. H. K. C. T. Y. J. Ye Tian. Evolutionary Large-Scale Multi-Objective Optimization: A Survey. ACM Computing Surveys 2022, 54, 1–34. [Google Scholar]
- L. F. P. E. R.-C. C. Hernández. Fuzzy feedback algorithm for the spectral handoff in cognitive radio networks. Revista Facultad de Ingeniería 2016, 80, 47–62. [Google Scholar]
- E. R. P. C. C. E. Rodriguez-Colina, «Multiple attribute dynamic spectrum decision making for cognitive radio networks,» de Eighth International Conference on Wireless and Optical Communications Networks, 2011.
- L. Méndez, E. Rodrı́guez-Colina, and C. Medina-Ramı́rez. Decision Making Based on the Dijkstra Algorithm a Solution for Cognitive Radio. Redes de Ingenierı́a 2013, 4, 1–9.
- Uchida, N.; Takahata, K.; Zhang, X.; Takahata, K.; Shibata, Y. Min-Max Based AHP Method for Route Selection in Cognitive Wireless Network. 2010 13th International Conference on Network-Based Information Systems (NBiS). LOCATION OF CONFERENCE, JapanDATE OF CONFERENCE; pp. 22–27.
- Büyüközkan, G.; Kahraman, C.; Ruan, D. “A fuzzy multi-criteria decision approach for software development strategy selection,” International Journal of General Systems, vol. 33, no. 2-3, pp. 259–280, 2004.
- L. Méndez, E. Rodriguez-Colina, and C. Medina-Ramírez. Decision Making Based on the Dijkstra Algorithm a Solution for Cognitive Radio. Redes de Ingenierı́a 2013, 4, 1–9. [Google Scholar]
Figure 1.
Proposed algorithm (ATDeMoGeo) diagram.
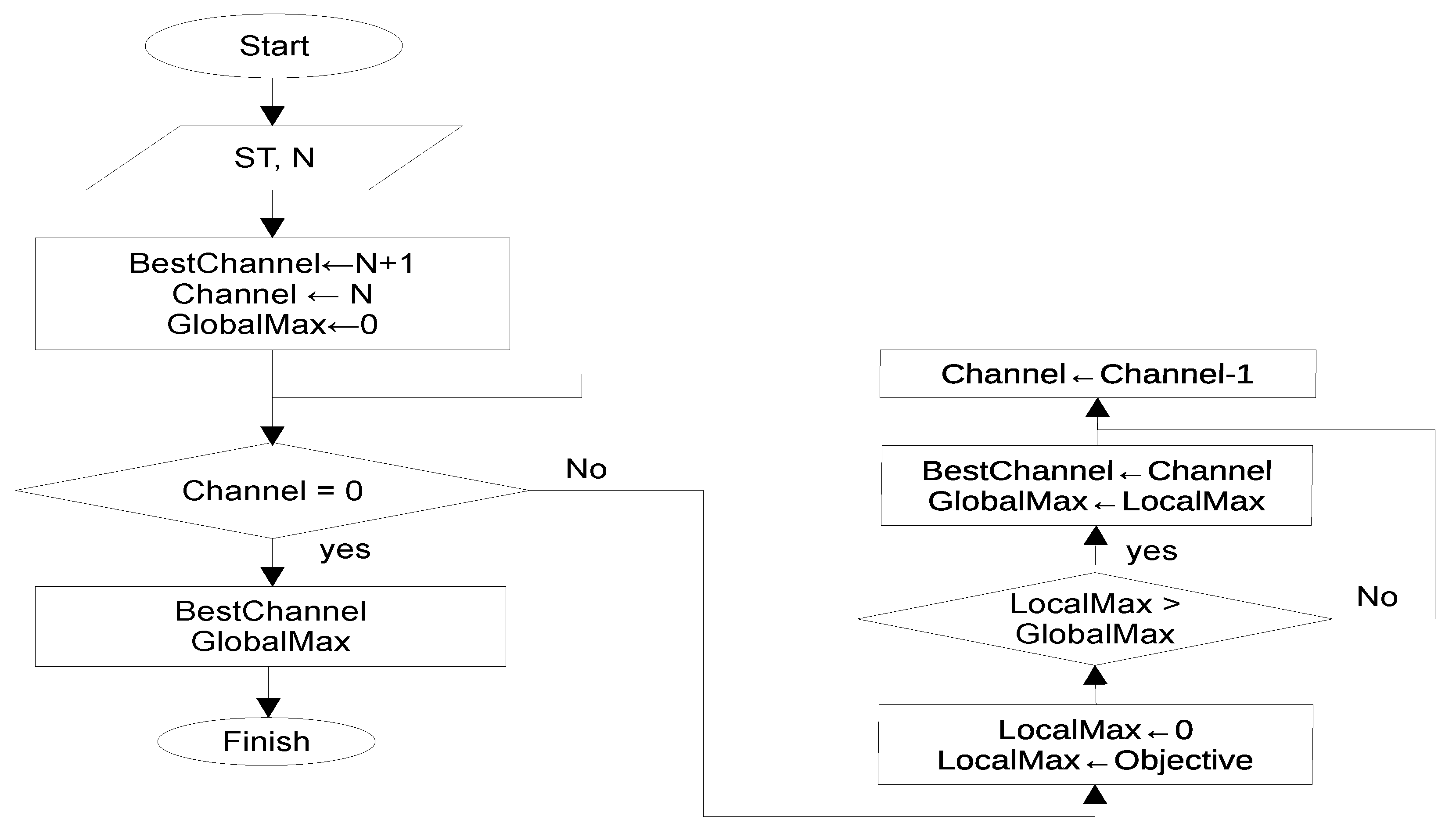
Figure 2.
ATDeMoGeoR Scheme (Feedback-Decision-Making Algorithm).
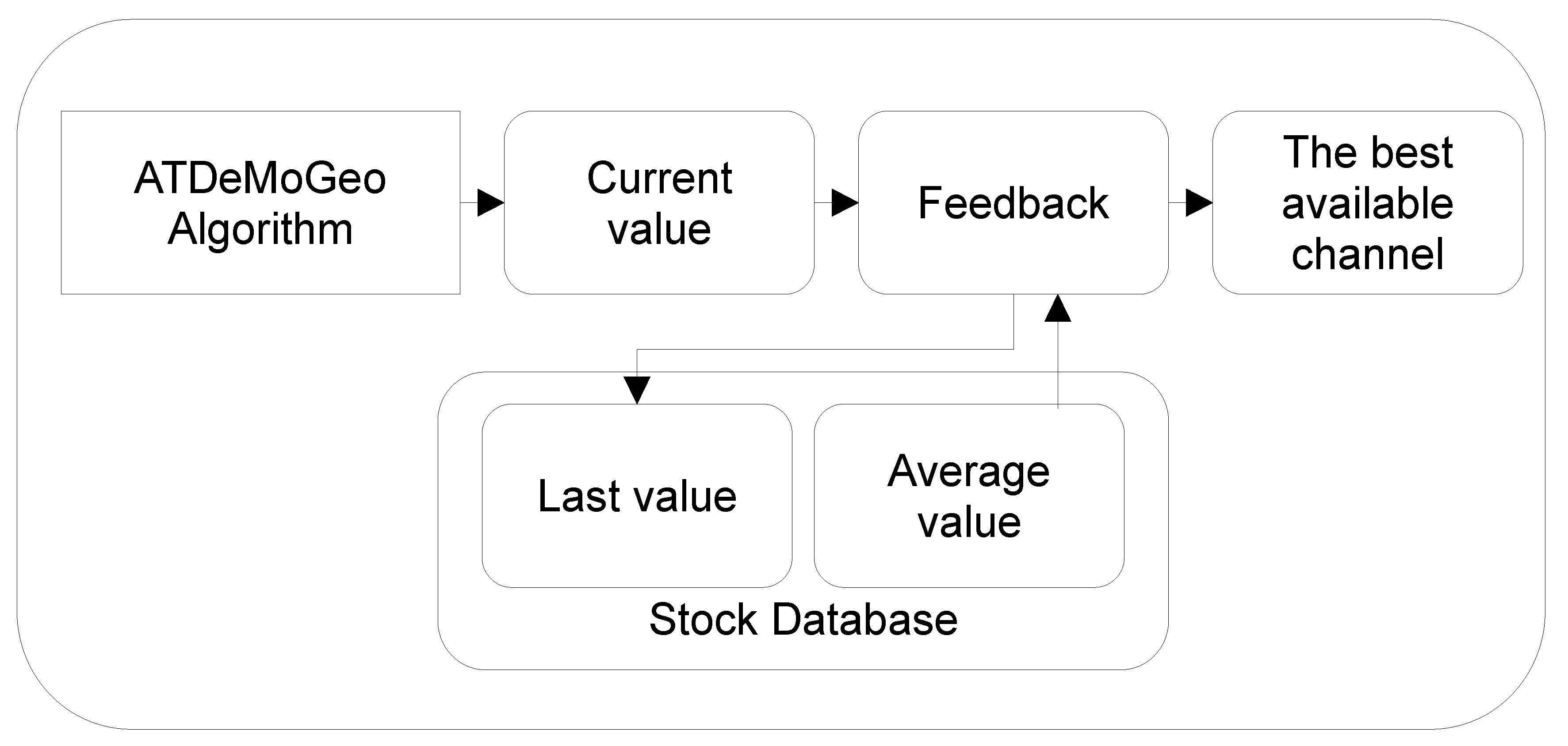
Figure 3.
Geographic mobility scenario with one BS.
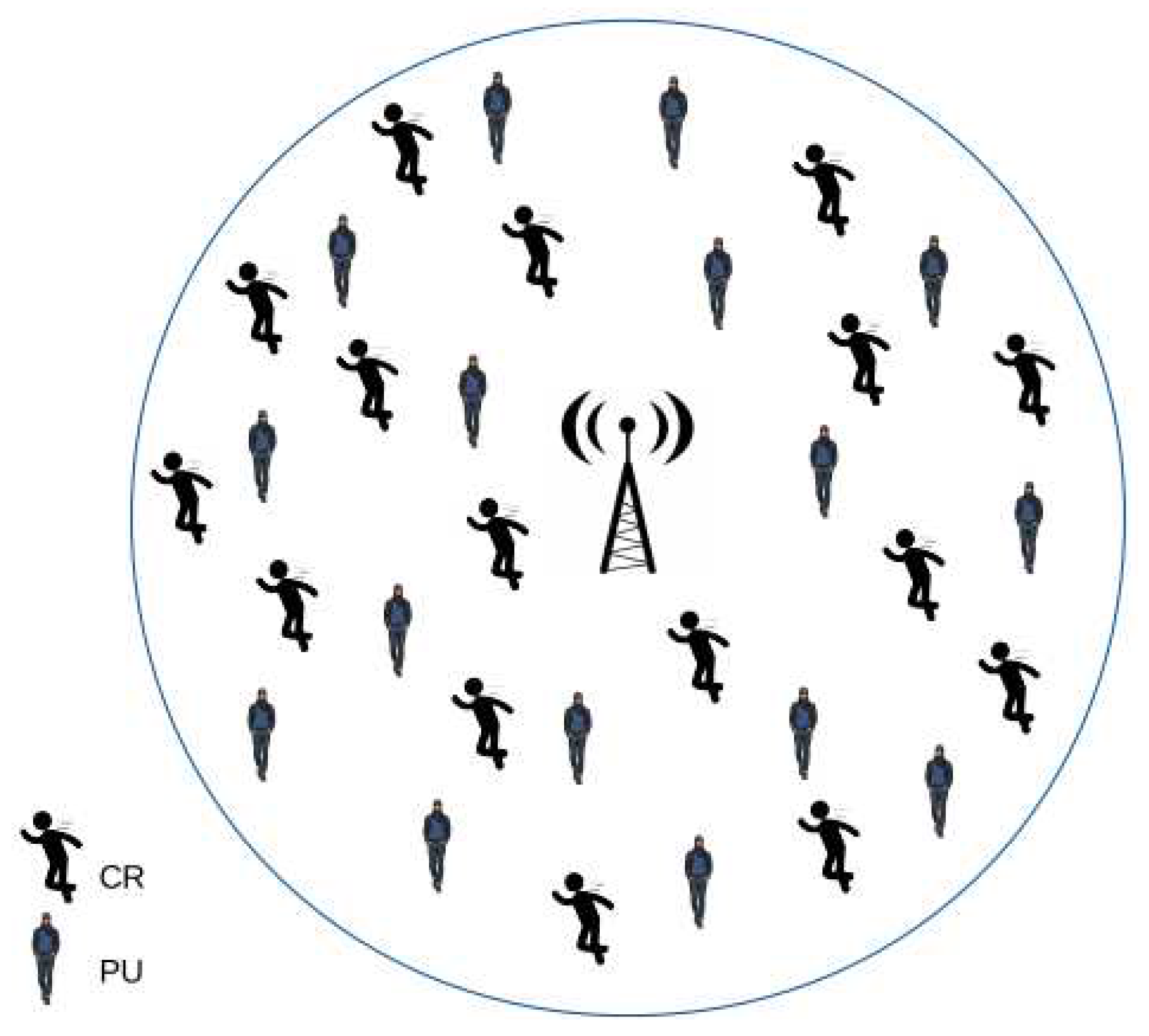
Figure 4.
Comparison among several decision-making algorithms considering 200 channels.
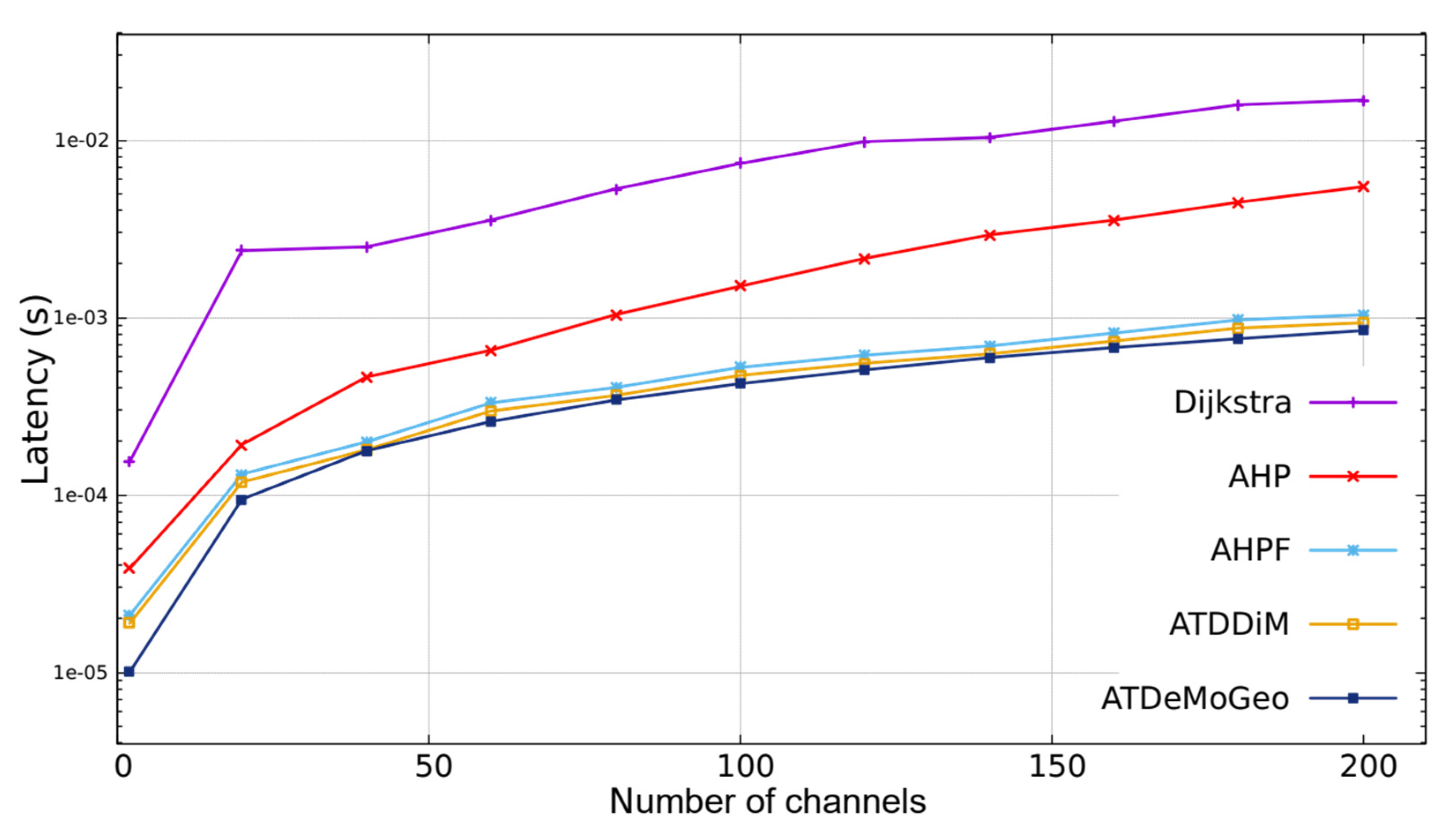
Figure 5.
Response time comparison of ATDeMoGeo with respect to reference algorithms.
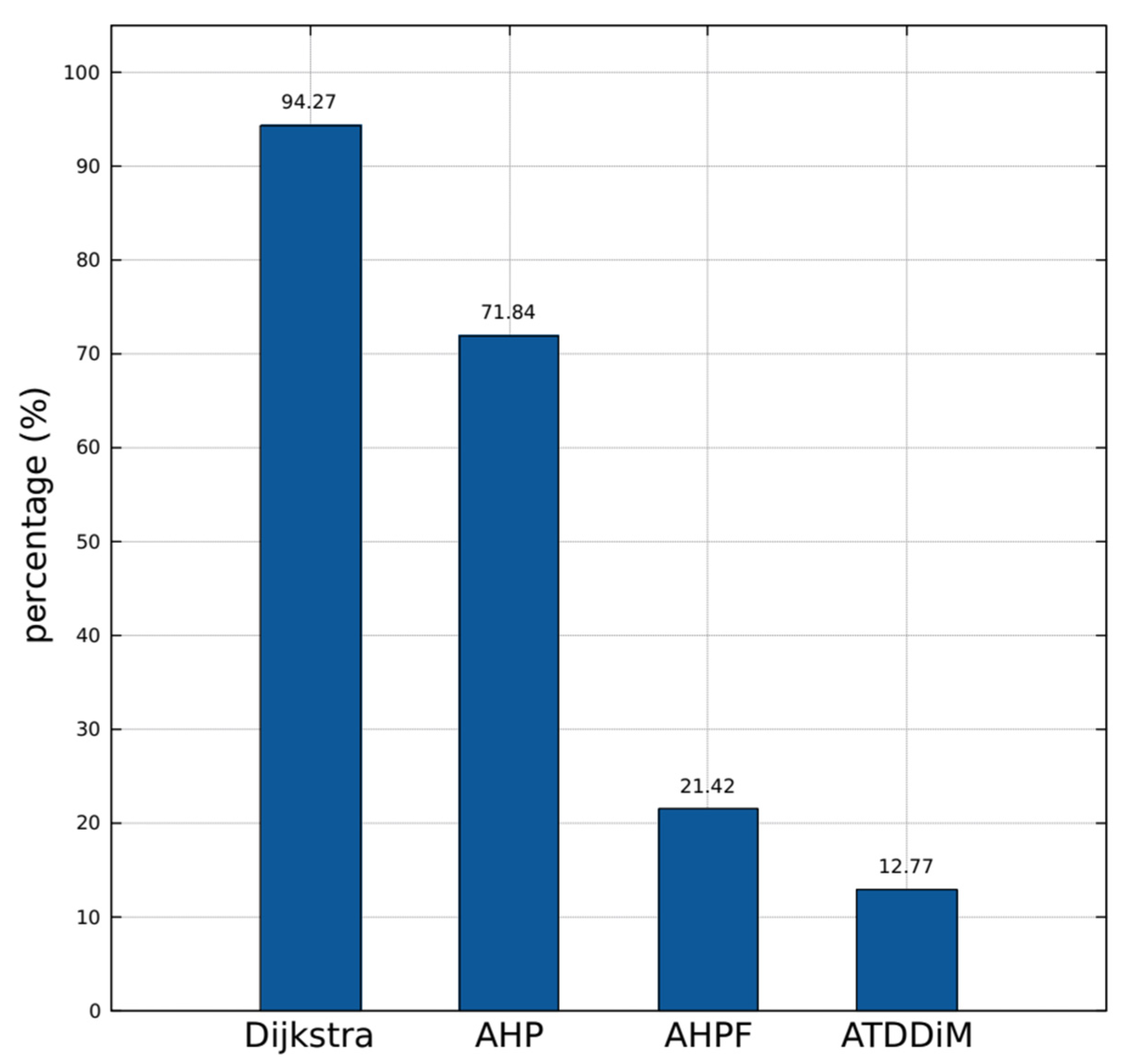
Figure 6.
Latency comparison of ATDeMoGeo and ATDeMoGeoR algorithms, with and without feedback between, for different numbers of channels.
Figure 6.
Latency comparison of ATDeMoGeo and ATDeMoGeoR algorithms, with and without feedback between, for different numbers of channels.
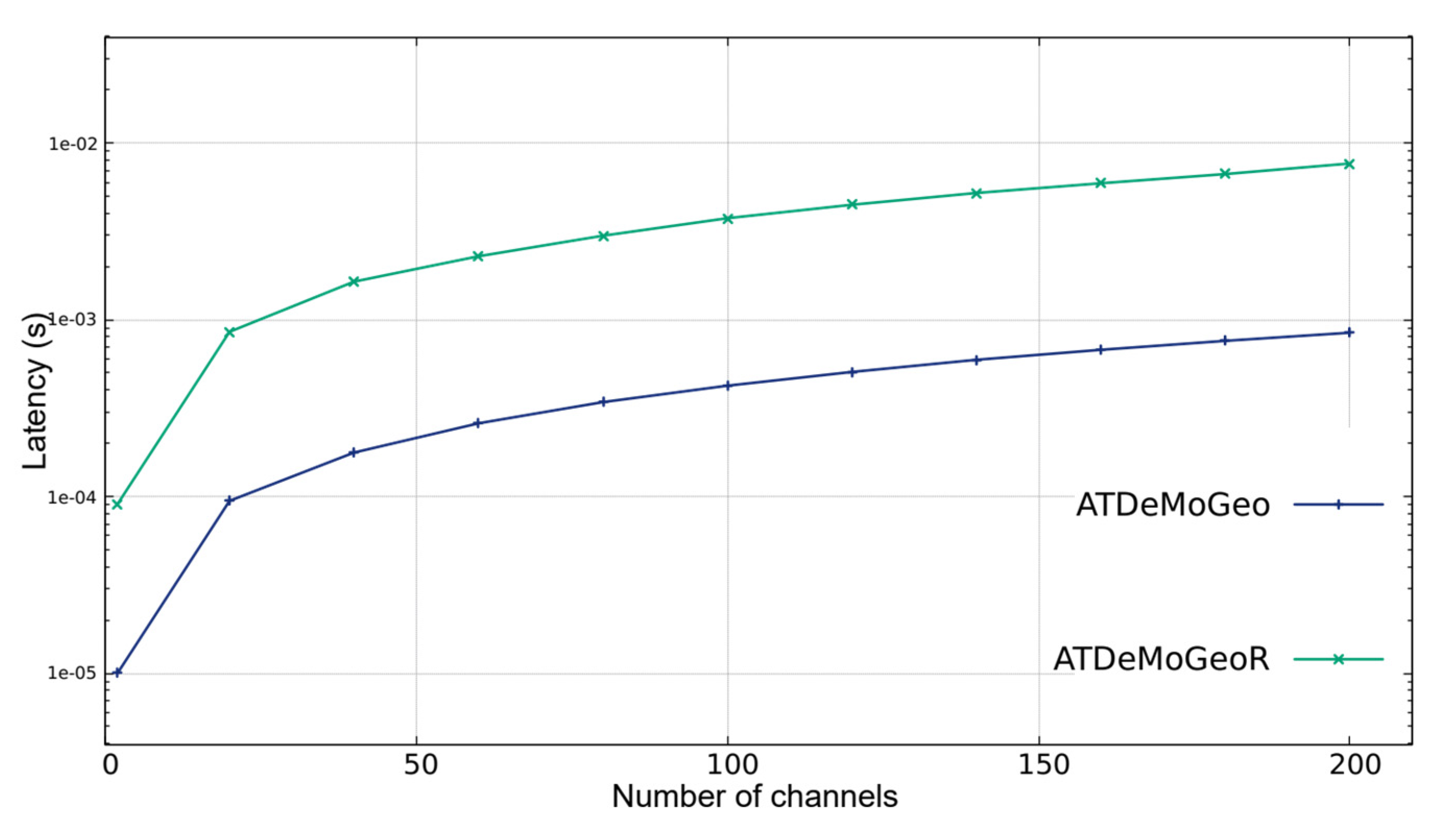
Figure 7.
Comparison between ATDeMoGeo and ATDeMoGeoR algorithms, with and without feedback mechanism, with their respective 95% confidence intervals for 200 channels.
Figure 7.
Comparison between ATDeMoGeo and ATDeMoGeoR algorithms, with and without feedback mechanism, with their respective 95% confidence intervals for 200 channels.
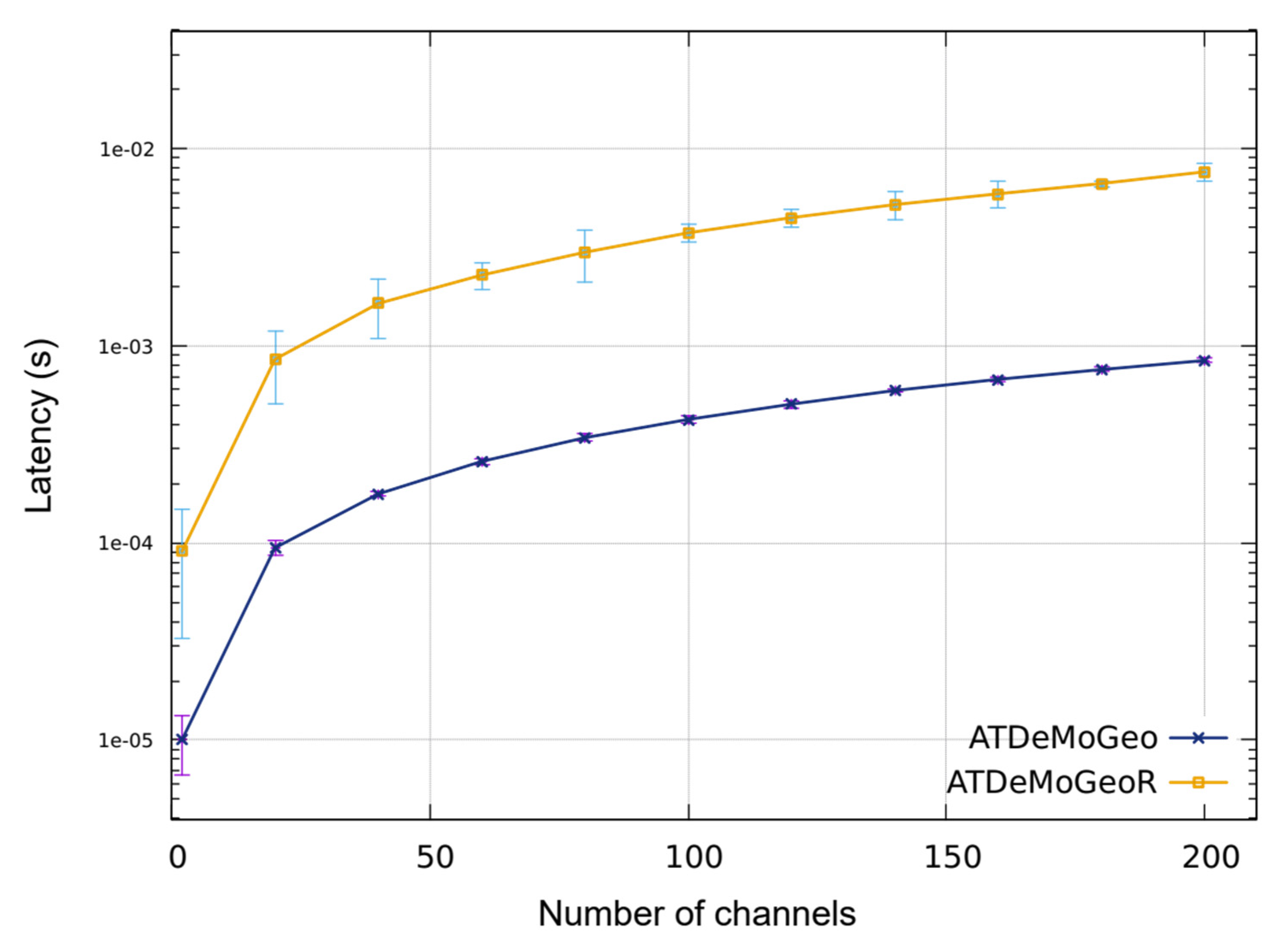

Table 1.
Attributes´ weights depending on the type of service used.
| Criteria | RT | BE |
|---|---|---|
| BW | 0.1471 | 0.2921 |
| SINR | 0.1970 | 0.3949 |
| AP | 0.3593 | 0.1607 |
| ETA | .02966 | 0.1523 |
Table 2.
Parameters used in the simulation scenario with NS-3.
| Parameters | Value |
|---|---|
| Frequency band | 824-849 [MHz] |
| Communication system | Mobile |
| Communication technology | GSM |
| Channels numbers | 124 |
| BW per channel | 200 [KHz] |
| Power Tx BS | 30[dBm] |
| Coverage Area of BS | 2167 [m] |
| BS Height | 25 [m] |
| Mobile user Rx power | -80 [dBm] |
| Mobile user height | 1 [m] |
Table 3.
Number of matches of the proposed algorithm with and without the feedback mechanism for the selection of a communication channel.
Table 3.
Number of matches of the proposed algorithm with and without the feedback mechanism for the selection of a communication channel.
| Characteristics of the GM scenario | Number of matches | Match rate | |
|---|---|---|---|
| Mobility radius | CPU occupancy | ||
| 2167 m |
25% 50% 75% |
1819 2062 2128 |
75.79% 85.91% 88.66% |
| 3250.5m | 1839 2090 2162 |
76.62% 87.08% 90.08% |
|
| 4334m | 1821 2075 2190 |
75.87% 86.45% 91.25% |
|
Table 4.
Confidence intervals of ATDeMoGeo and ATDeMoGeoR algorithms, with and without feedback mechanism, with a confidence level of 95% in the selection of the communication channel.
Table 4.
Confidence intervals of ATDeMoGeo and ATDeMoGeoR algorithms, with and without feedback mechanism, with a confidence level of 95% in the selection of the communication channel.
| Algorithm | Analyzed channels | Average value | Confidence interval | |
|---|---|---|---|---|
| ATDeMoGeo | 2 20 40 60 80 100 120 140 160 180 200 |
1.0018E–05 9.4471E–05 1.7717E–04 2.5918E–04 3.4220E–04 4.2337E–04 5.0618E–04 5.9363E–04 6.7631E–04 7.5883E–04 8.4375E–04 |
6.6341E–06 8.6513E–05 1.7216E–04 2.5102E–04 3.2805E–04 4.0347E–04 4.8179E–04 5.8207E–04 6.6335E–04 7.3926E–04 8.2255E–04 |
1.3402E–05 1.0243E–04 1.8217E–04 2.6733E–04 3.5634E–04 4.4327E–04 5.3058E–04 6.0519E–04 6.8927E–04 7.7841E–04 8.6496E–04 |
| ATDeMoGeoR | 2 20 40 60 80 100 120 140 160 180 200 |
9.0613E–05 8.5449E–04 1.6415E–03 2.2854E–03 2.9847E–03 3.7482E–03 4.4709E–03 5.2138E–03 5.9145E–03 6.6679E–03 7.6456E–03 |
3.2976E–05 5.1269E–04 1.0943E–03 1.9420E–03 2.0981E–03 3.3557E–03 3.9891E–03 4.3504E–03 4.9912E–03 6.4288E–03 6.8606E–03 |
1.4825E–04 1.1963E–03 2.1886E–03 2.6288E–03 3.8714E–03 4.1408E–03 4.9526E–03 6.0772E–03 6.8378E–03 6.9069E–03 8.4306E–03 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



