
Submitted:
28 August 2023
Posted:
29 August 2023
You are already at the latest version
Abstract
Aminoacyl-tRNA synthetases (aaRSs) originated from an ancestral bidirectional gene (mirror symmetry) and through the evolution of the genetic code the twenty aaRSs exhibit a symmetrical distribution in a 6-dimensional hypercube of the Standard Genetic Code. In this work, we assume a primeval RNY code, and the Extended Genetic RNA code type II which includes codons of the type YNY, YNR and RNR. Each of the 4 subsets of codons can be represented in a 4-dimensional hypercube. Altogether these 4 subcodes constitute the 6-dimensional representation of the SGC. We identify the aaRSs' symmetry groups in each of these hypercubes. We show that each of the four hypercubes contains the following sets of symmetries for the two known Classes of synthetases: RNY: dihedral group D2; YNY: binary group Z2; YNR: amplified octahedral group Oh; and RNR: binary group Z2. We demonstrate that for each hypercube, the group of symmetries of Class 1 is the same as the group of symmetries of Class 2. The biological implications of these findings are discussed.
Keywords:
Aminoacyl-tRNA synthetases
; Standard Genetic Code
; Symmetry groups
; Origin and evolution of the genetic code
; Group Theory
1. Introduction
Aminoacyl-tRNA synthetases (aaRSs) are key players of the genetic code in all living beings. AaRS attaches an amino acid to the cognate tRNA, and the aminoacyl-tRNA is then used for translation upon binding to mRNA according to the codon–anticodon interaction on the ribosome. The Standard Genetic Code (SGC) is the mapping of 61 codons or triplets to 20 canonical amino acids. There are 20 aaRSs, one for each of the 20 standard amino acids. AaRSs are divided into two mutually exclusive Classes, 1 and 2, based on their structural, functional, and evolutionary relatedness [1,2,3,4,5,6,7,8]. Each aaRS falls into either Class 1 or Class 2, except for lysyl-tRNA synthetase (LysRS), which has a representative in both classes. The correspondence between amino acids and synthetases is one to one, that is, bijective. For every triplet, or codon there is a synthetase, associated to the amino acid it specifies. In a previous work [9], we outlined the group of symmetries of both Classes of synthetases in each of the 4-dimensional hypercubes of the so-called Extended Code of type II [10,11]. Herein, we rigorously determine the symmetries of aaRSs in the 4 subcodes RNY, YNY, YNR, and RNR. The article is organized as follows. First, we provide the basic mathematics needed to understand the derivation of symmetries of the SGC. In Appendix A we present formal mathematical definitions and concepts. Second, we determine the symmetries in each of the four subcodes. We show that the group of symmetries of Class 1 is the same as the group of symmetries of Class 2. We also analyze the 5-dimensional hypercubes NNY and NNR as obtained by the union of RNA with YNY, and YNR with RNR, respectively. The 4 subcodes constitute the whole SGC. Finally, we discuss the biological implications of the results.
1.1. Basic Mathematics of the SGC
The cartesian product being the set of the four RNA-nucleotides, C=Cytosine, U=Uracil, A=Adenine, G=Guanine, is the set of the 64 triplets where The standard genetic code (SGC) may be seen as a surjective function being the set of the 20 known amino acids, and the stop signal, which means the instruction of finalizing the process of synthesis of a protein.
For every its preimage set is the set of triplets, also called codons, that encode the amino acid, or stop signal, Since the decipherment of the genetic code [12] (Marshall W. Nirenberg, Har Gobind Khorana and Robert W. Holley, 1967), it is known that the number of coding triplets for any is one of the numbers 1,2,3,4, or 6.
In Table 1 we show the table of the genetic code, highlighting the 4 subcodes RNY, YNY, YNR and RNR. The table also indicates the subcodes NNY and NNR.
1.2. Arithmetization of the genetic code
The bijective correspondence between the set and the set being induces a bijective correspondence between the set of the 64 triplets and the set of all the sextuples of zeros and ones.
Binary operations: In the binary set the two binary operations the so-called addition and product, module 2, are defined. Their Cayley Tables (Table 2) are:
They define, in the set the algebraic structure of a field, or commutative division ring. This is the smallest possible field, with only two elements: the neutral of the addition and the neutral of the product, respectively.
The addition ⊕2 is extended, component-wise, to the set which, with the natural definition of the product of any scalar , by a sextuple becomes a 6-dimensional vector space over the binary field This vector space is the so-called 6-dimensional binary hypercube.
The bijection between and the set of the 64 triplets, induces in it the algebraic structure of a 6-dimensional vector space, whose canonical basis is the system: (ACC, UCC, CAC, CUC, CCA, CCU). The addition of nucleotides is shown in the following Table 3:
It is seen that the nucleotide C, cytosine, is the neutral element of the group. This group is isomorphic to de group which is known as the Four Klein Group. It is an Abelian group of order 4, where each element is its own inverse. It is, in the Felix Klein list of finite groups, the fourth, and the first that is not cyclic.
Mutations in the triplets of the genetic code: A mutation in a triplet is the substitution of any of its components, by some nucleotide. For example, GUC→GAC, where U is replaced by A. Obviously, a mutation in a triplet may produce the change of the amino acid it encodes. In our example, valine, that is encoded by GUC, is converted into aspartic acid, encoded by GAC. Algebraically, a mutation in a triplet is performed by the addition of triplets of the canonical basis. In our example, the mutation GUC→GAC is obtained by the addition of the triplet CGC= CAC+CUC.
Classification of the nucleotides
There is a partition of the set being pyrimidines, and purines. The condition of being a pyrimidine or a purine is called the chemical type of a nucleotide.
Transitions and transversion: A mutation is called a transition if it does not change the chemical type, and it is called a transversion if the chemical type is changed. It is easy to notice that transitions are produced by additions of pyrimidines and transversions by addition of purines.
The primaeval genetic code. It is assumed that there was, in the RNA world, a primitive, or primaeval genetic code, of only sixteen triplets and eight amino acids: the set where is a purine, is any of them, and is a pyrimidine. It is a 4-dimensional hypercube, a translation of the 4-dimensional subspace derived from for transversion in the first nucleotide. By transversions in the first or the third component, the hypercubes and are derived from the primaeval These four sets are pairwise disjoint, and they cover the whole set Hence, the set of sets is a partition of The hypercube determines, with the addition a subgroup of the additive group being the other and its cosets. With the addition and the product of scalars by vectors, determines a 4-dimensional vector subspace, while and are its affine subspaces, that is, translations of it, namely:
The Classes of Synthetases
The synthetases are enzymes that regulate the selection of amino acids that shall be charged to tRNA molecules. A little more than 20 aaRSs are found in modern organisms. They are classified into two groups, Class 1, and Class 2, each having three subclasses (a, b, and c) based on similarity in sequences and structures [13,14]. The classification is shown in Table 4:
In general, aaRS consists of a catalytic domain, an anticodon-binding domain, and often an editing domain. Each class harbors class-specific characteristic motifs and structural topology in its catalytic domains [3].
According to the RO model [15,16,17,18] the table of the genetic code can be divided into the sub-codes NAN, NGN, NUN, NCN. We have also shown that there exists an automorphism F of the cube defined also piecewise, which transforms that division into the sub-codes RNR, YNR, RNY, YNY, respectively, which is precisely our algebraic model [19].
3. Results
3.1. Group of symmetries of the classes of synthetases in the hypercube
The members of Class 2 are in the vertexes of a square, contained in the set , the convex closure of the set , taken, by a suitable change of coordinates, rotations, and translations of axis, as a representation of the hypercube See Figure 1:
The quadruplets that belong to Class 2 of synthetases (colored in black), are in the set of vertexes of a square one of the 24 faces of the hypercube. is a subset of the set of the sixteen vertexes of the hypercube The set of vertexes of that square is:
where
, , , and black colored.
The center of this square is the point
The members of Class 1 are in the complementary set of vertexes that is, the other 12 vertexes, red colored, out of the four vertexes of the square
where
Now we can state the following:

3.2. Theorem I. The group of symmetries of Class 1 are the same as that of Class 2.
Proof: As a symmetry of the Class 1 is a bijective isometrical function from onto itself, it preserves the set It also preserves the square that contains the quadruples of Class 2, that is, the vertexes of the square It means that both classes have the same group of symmetries. That is so, because the binary set of sets is a partition of the finite set of the 16 vertexes of the hypercube
Observation: A similar theorem takes place in any of the other hypercubes of the Extended code type II, and in the whole 6-dimensional hypercubes In the case of the 4-dimensional YNR, the 5-dimensional NNR and the whole 6-dimensional it is valid if, for methodological reasons, we assume the stop signal as it would be an amino acid of Class 1.
Let us consider the orthogonal matrix which represents a rotation of angle in the plane It operates over the set of vertexes of the square S in the following way:
This means that is an isometry of the square
Let us now consider the orthogonal matrix , which represents a reflection through the 3-dimensional hyperplane that reverses the fourth axis It operates over the set of vertexes of the square in the following way:
This means that is an isometry of the square It is not difficult to verify the following equalities, that occur between the matrixes and They are the defining relations of the dihedral group the group of all the symmetries of a square.
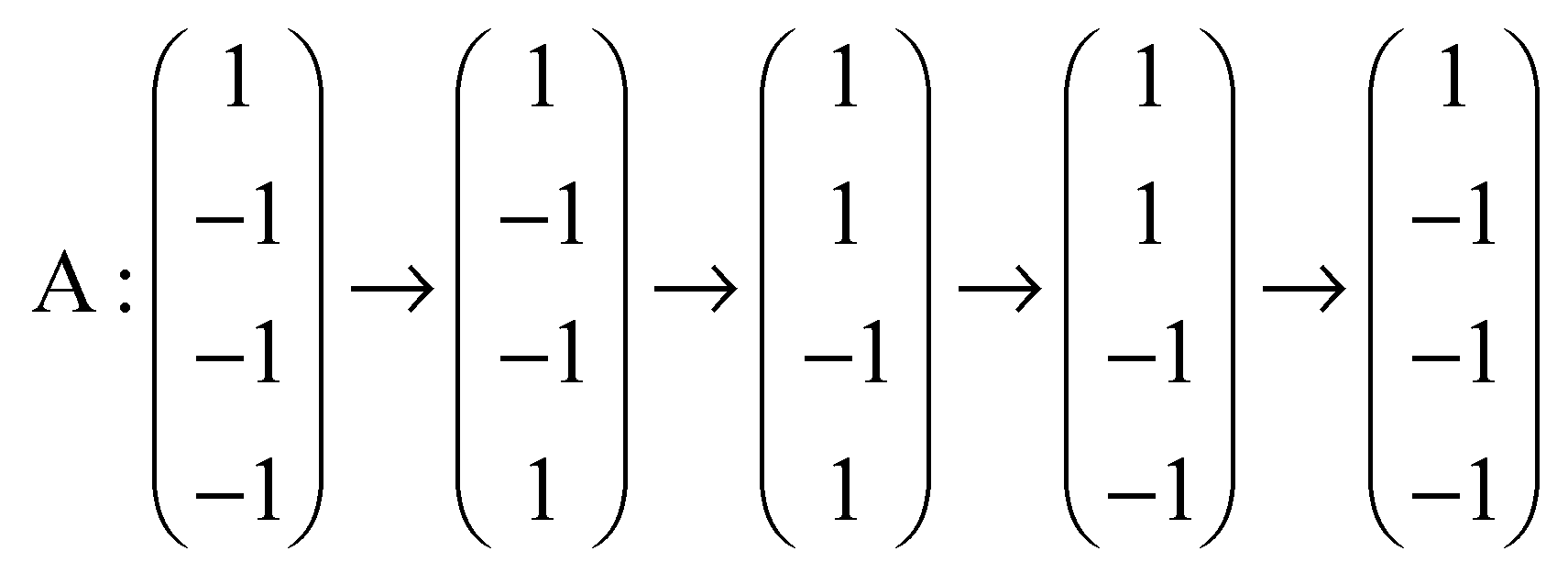
Now, we will see which is the action of the dihedral group generated by the matrixes and over the set of the 12 quadruplets that represent the synthetases of Class 1.
The action of over the set is,
It is seen that is an isometry of the set of synthetases of Class 1.
The action of over the set is:
Note that is an isometry of the set of synthetases of Class 1.
We see that is a symmetry of the set vertexes of the Class 1 of synthetases. As and are symmetries of the Class 1 of synthetases this result confirms the assertion of Theorem 1, where it was proved that boss classes have the same group of symmetries.
The main result of Part I; We have proved that the group of symmetries of both classes of synthetases, in the hypercube is the dihedral group
3.3. Group of symmetries of the classes of synthetases in the hypercube
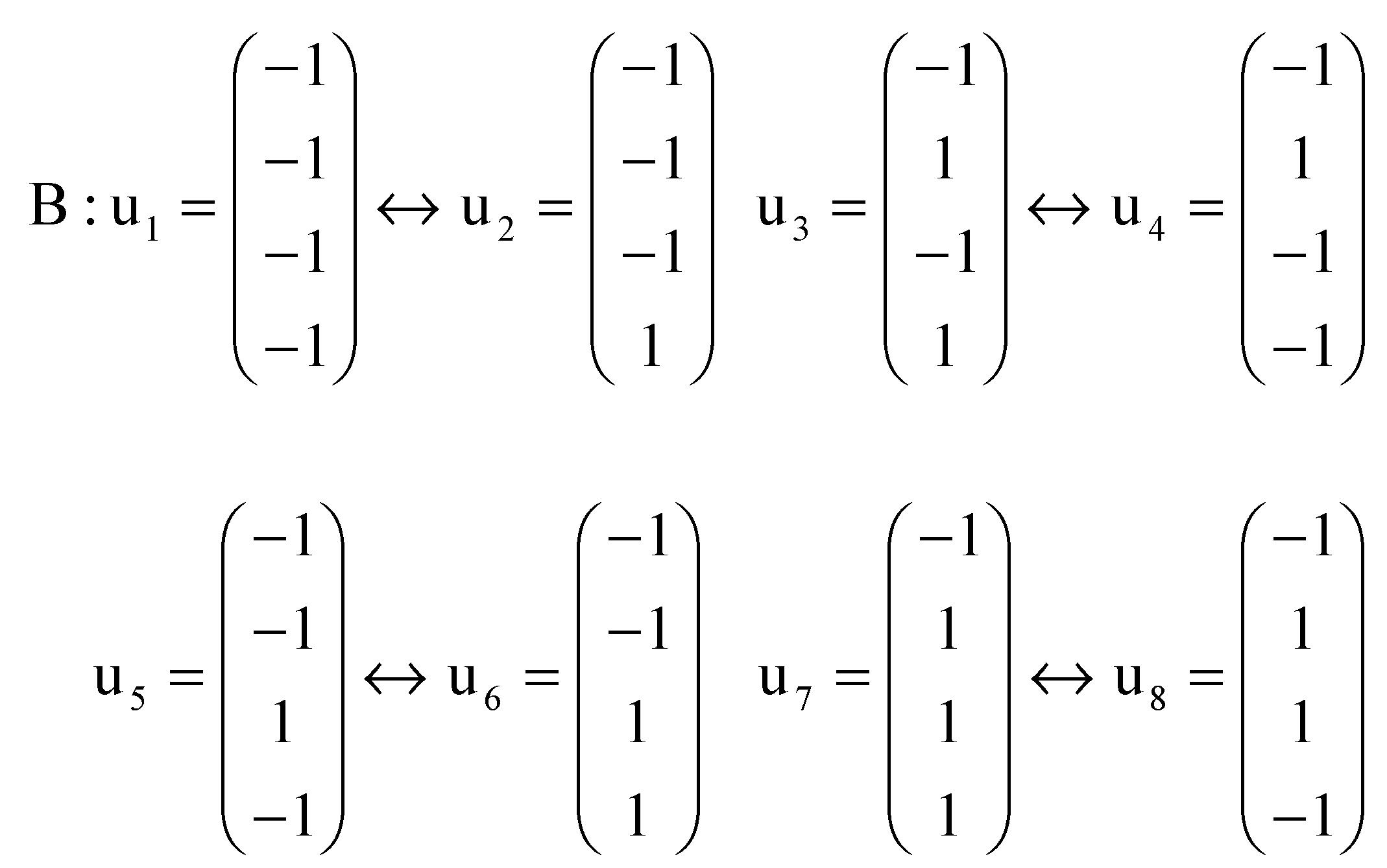
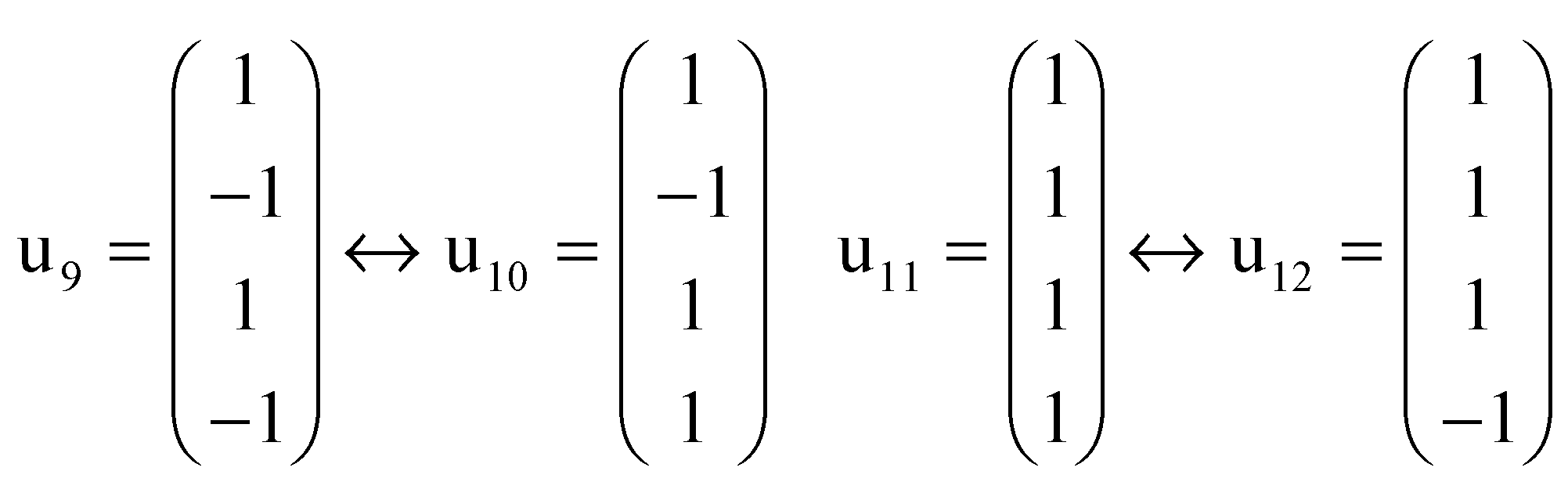
In this case the members of each class are in eight vertexes, out of the sixteen vertexes of the hypercube They are represented by the sixteen quadruples of the set of ones and minus one, being the hypercube the convex closure of the set The set is taken, by a suitable change of coordinates, rotations, and translations of axis, as a representation of the hypercube The center of this hypercube is the origin of coordinates .
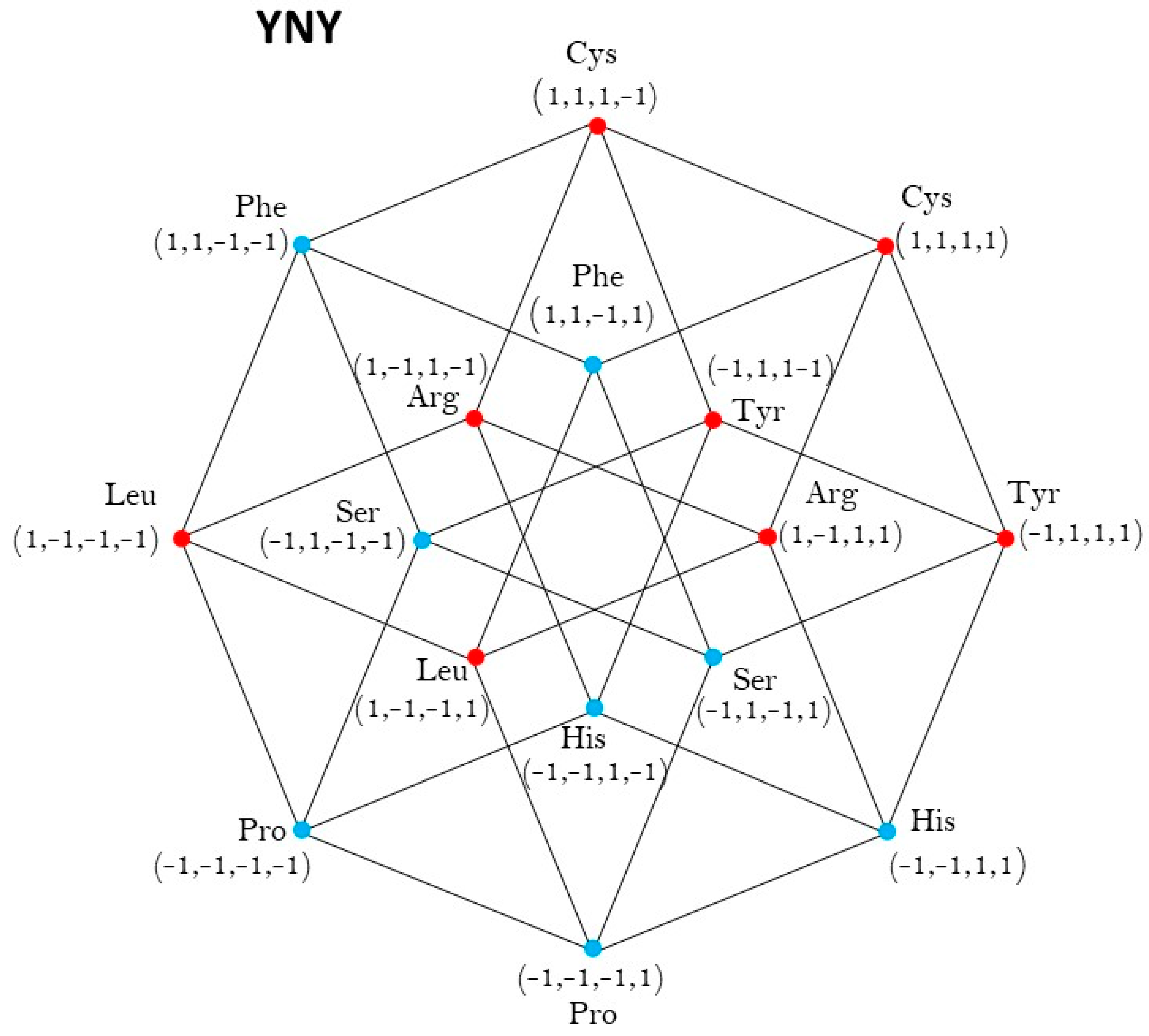
Figure 2.
aaRSs distribution in the code. Class 1 (red, 4 amino acids) and Class 2 (blue, 4 amino acids). Graphic representation of the subsets and Second 4-dimensional hypercube of the Extended RNA-code type 2:
Figure 2.
aaRSs distribution in the code. Class 1 (red, 4 amino acids) and Class 2 (blue, 4 amino acids). Graphic representation of the subsets and Second 4-dimensional hypercube of the Extended RNA-code type 2:
The set of vertexes of the Class 1, colored in red, is the set:
The members of Class 2 are in the complementary set of vertexes, that is, the other eight vertexes, colored in black, out of the eight of Class 1.
This is the set:
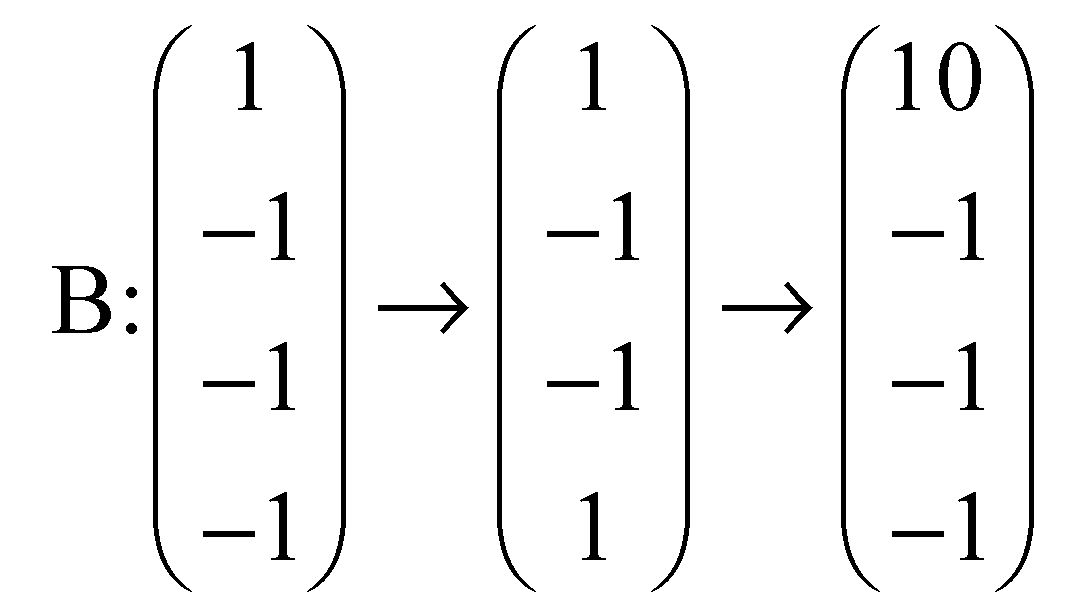
Let us consider the orthogonal matrix which represents a rotation of angle π = 180° around the vectorial plane generated by the vectors and , which fixes the point changes the sign the vector and interchanges the vectors and Let us now see what the action of the rotation A over the set is:
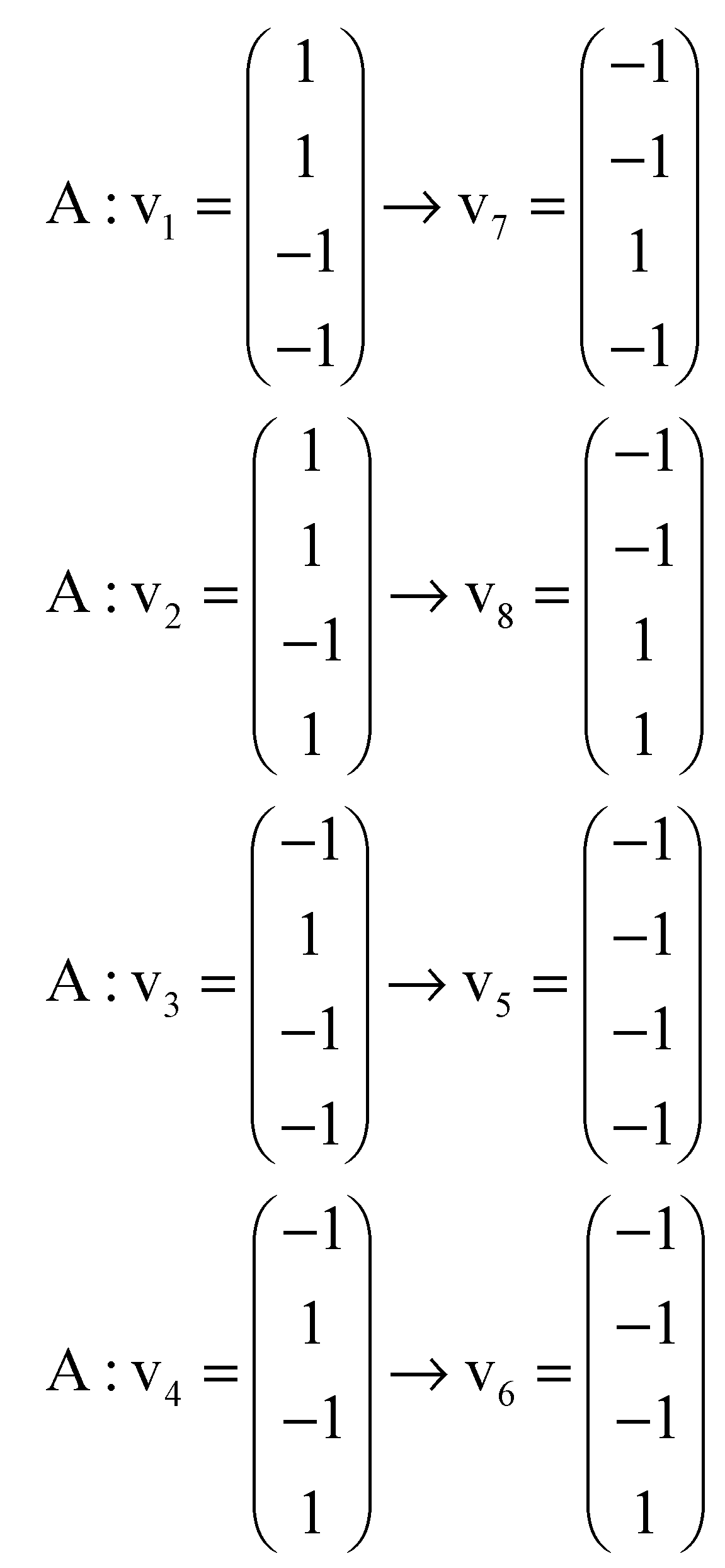
It is seen that the rotation is a symmetry of the set
Next, we will see the action of over the set of vertexes
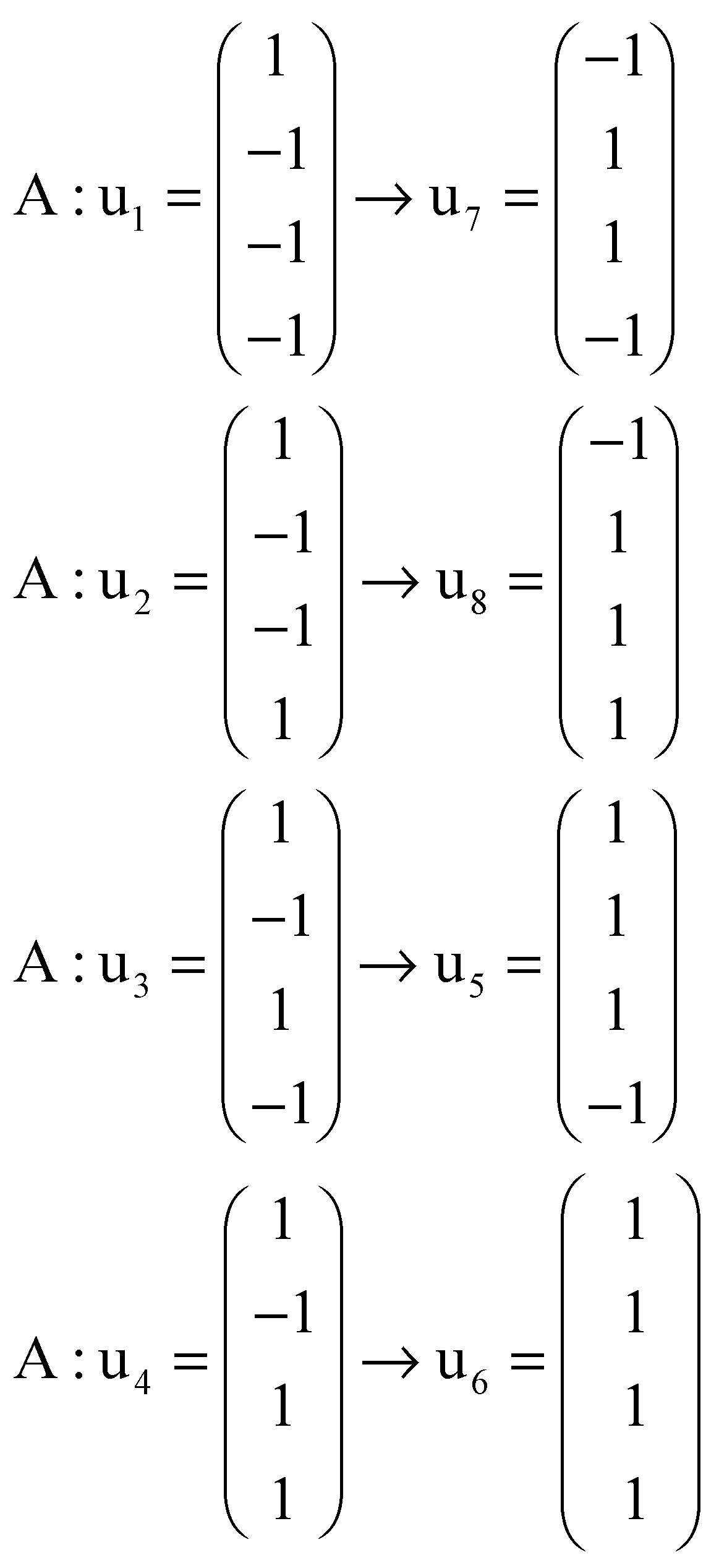
Notice that rotation is a symmetry of the set
The rotation of angle π = 180° is an element of order two. Then, the group of symmetries of the classes of synthetases in the hypercube contains the group generated by the rotation which is isomorphic to the binary group
The isometric transformation is the only symmetry of the sets and in the hypercube Then, the group of symmetries of both classes of synthetases is the binary group
3.4. Group of symmetries of the synthetases in the hypercube
Figure 3.
aaRSs distribution in the code. Class 1 (red, 3 amino acids) and Class 2 (blue, 3 amino acids and yellow, the stop signals). Graphical representation of the subsets and Third 4-dimensional hypercube of the Extended code type II: .
Figure 3.
aaRSs distribution in the code. Class 1 (red, 3 amino acids) and Class 2 (blue, 3 amino acids and yellow, the stop signals). Graphical representation of the subsets and Third 4-dimensional hypercube of the Extended code type II: .
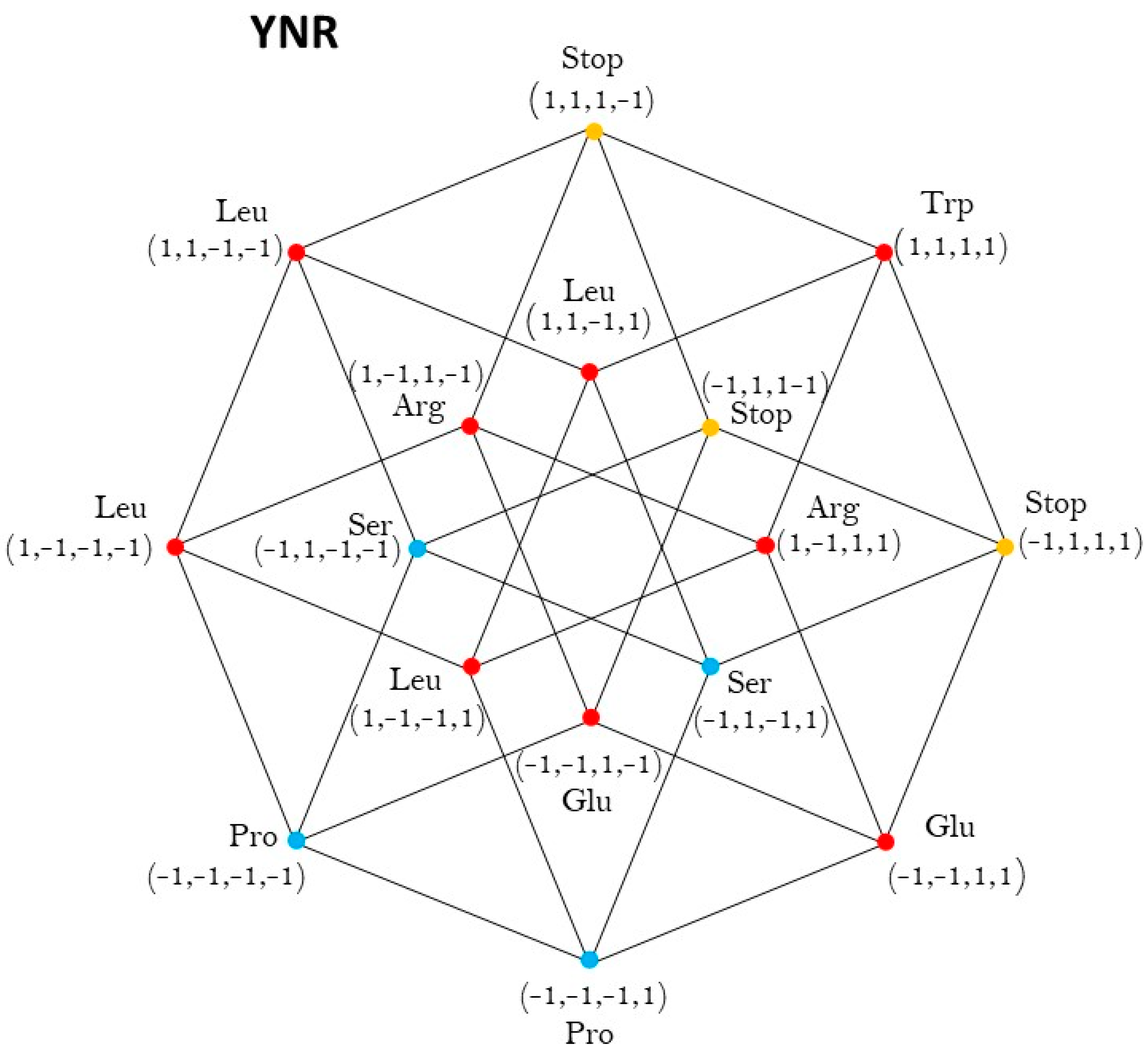
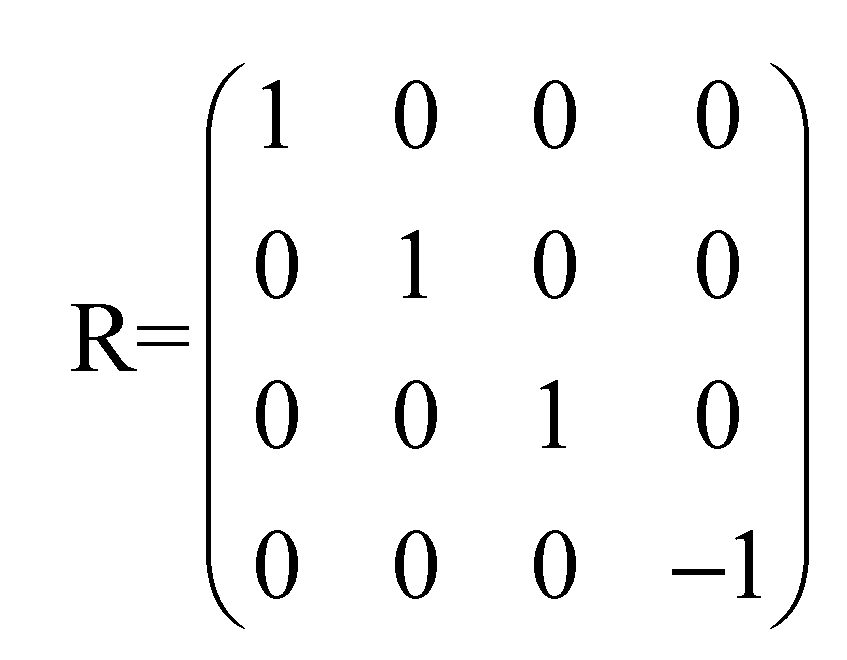
For methodological reasons we have assumed the three stop codons as members of Class 1. In this case the members of each Class are in the eight vertexes of a 3-dimensional cube. Both Classes coincide with the cubes and The vertexes of are represented by the sixteen quadruples of the set of ones and minus ones, being the hypercube the convex closure of the set The set is taken, by a suitable change of coordinates, rotation, and translations of axis, as a representation of the hypercube The center of this hypercube is the origin of coordinates .
The set of vertexes of the cube, associated to Class I, colored in red, is the set:
The center of this cube is the point and the set of vertexes of the Class 2, colored in black, is the set:
whose center is the point
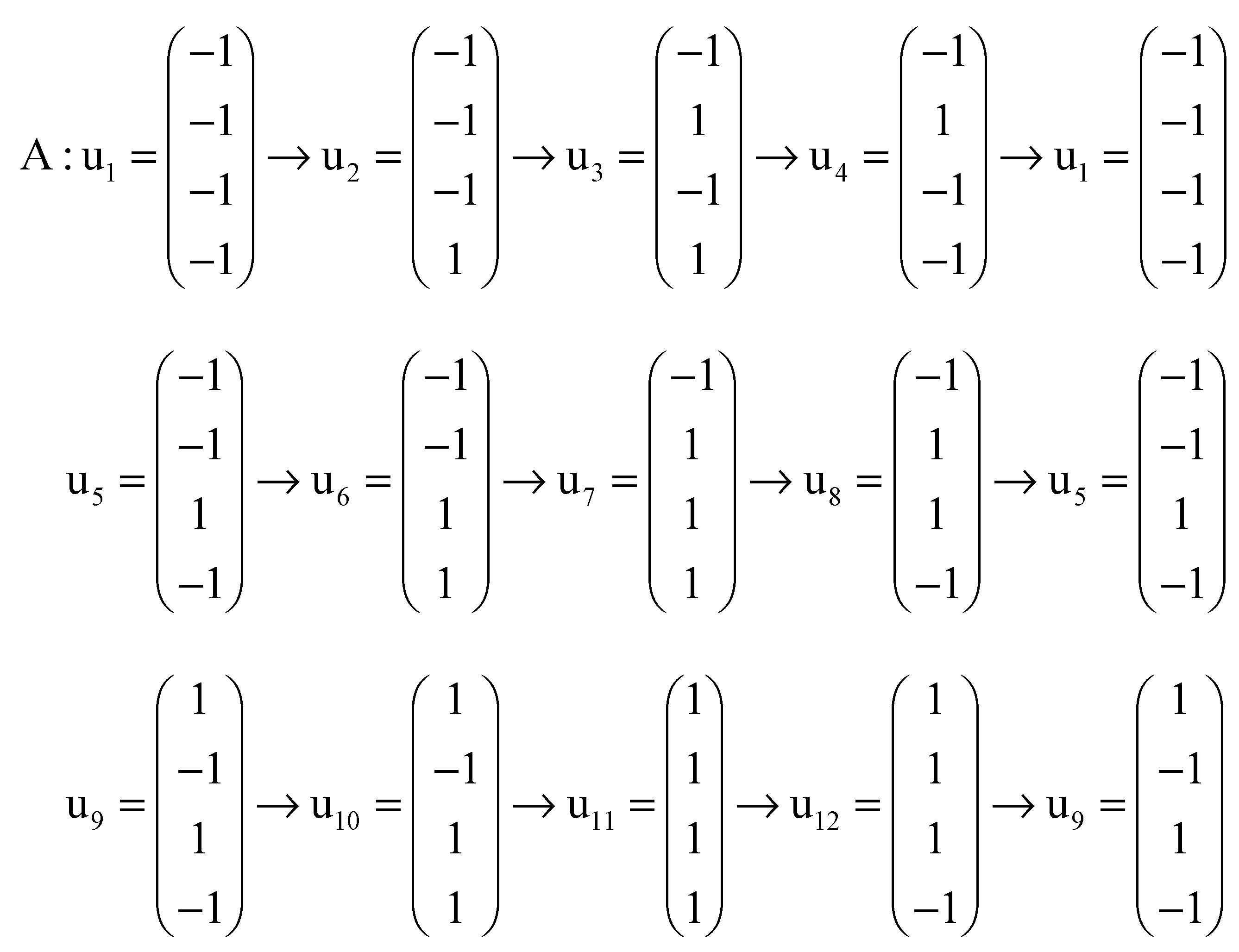
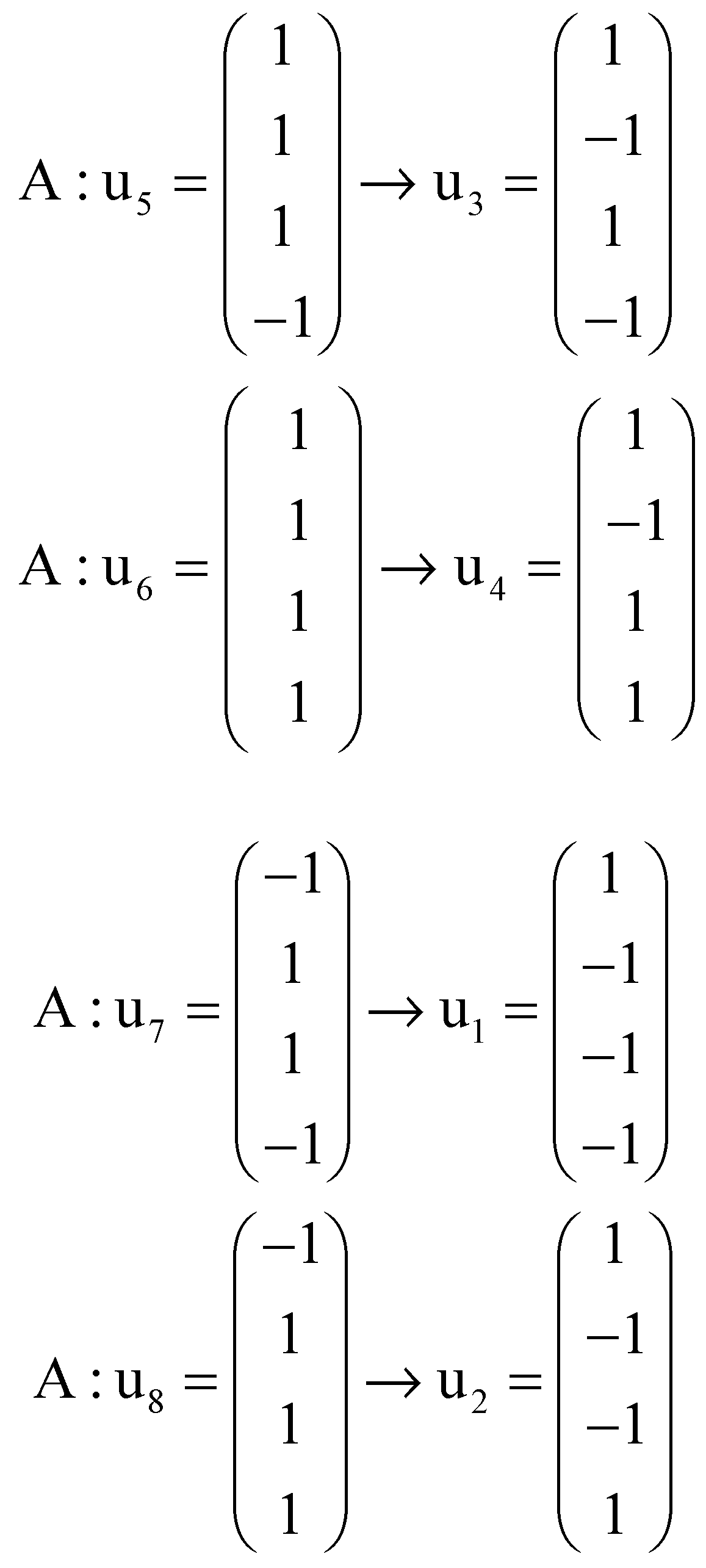
Then, we have proved that the group of symmetries of both classes of synthetases in the hypercube is the extended octahedral group
Let us consider the translation associated to the point Applying it to the set we obtain:
which is the set of vertexes of another cube, with center in the origin of coordinates.
Analogously, applying to the set the translation we obtain:
which is the same set of vertexes of a cube with center in the origin of coordinates.
Let us now consider the orthogonal matrices:
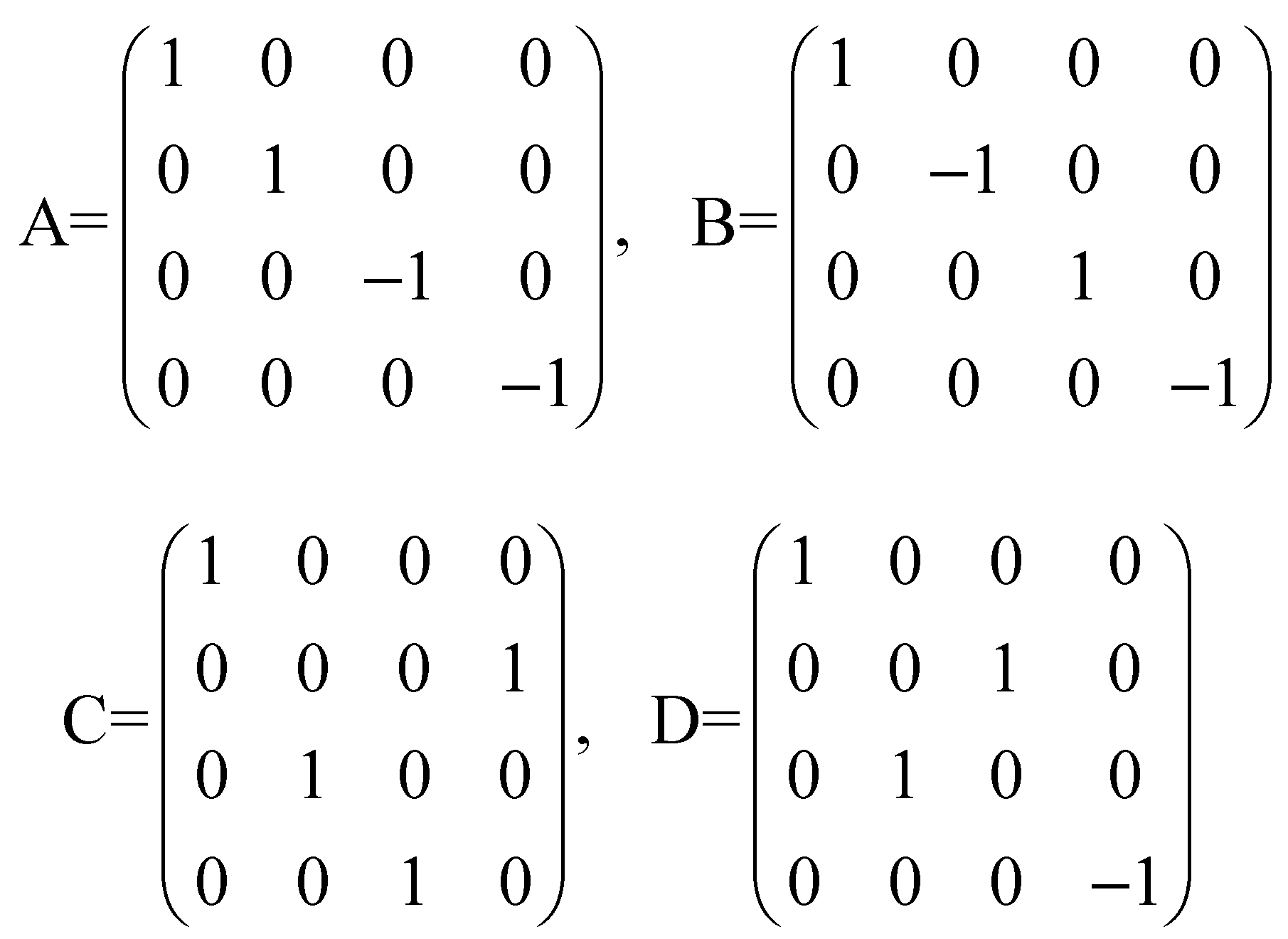
which represent rotations, and of angles radians and of angle radians. They satisfy the relations:
that are the defining relations of the octahedral group which is the group of the rotational symmetries of a cube or regular hexahedron. It is also the group of rotational symmetries of a regular octahedron, which is the dual figure of the regular hexahedron. Adding to the set of rotational matrixes and the matrix
which represents a reflection through the three-dimensional subspace generated by the unitary vectors that reverses the fourth axis the amplified octahedral group is obtained, where
We invite the lector to verify that these rotations, and the reflection are symmetries of the sets and of the vertexes of the Class 1 and the Class 2, respectively.
From this it follows that the group of symmetries of classes of synthetases in the hypercube is the extended octahedral group .
3.5. Group of symmetries of the synthetases in the hypercube
Figure 4.
aaRSs distribution in the code. Class I (red, 3 amino acids) and Class 2 (blue, 5 amino acids). Graphic representation of the subsets and Fourth 4-dimensional hypercube of the Extended RNA-code type II: .
Figure 4.
aaRSs distribution in the code. Class I (red, 3 amino acids) and Class 2 (blue, 5 amino acids). Graphic representation of the subsets and Fourth 4-dimensional hypercube of the Extended RNA-code type II: .
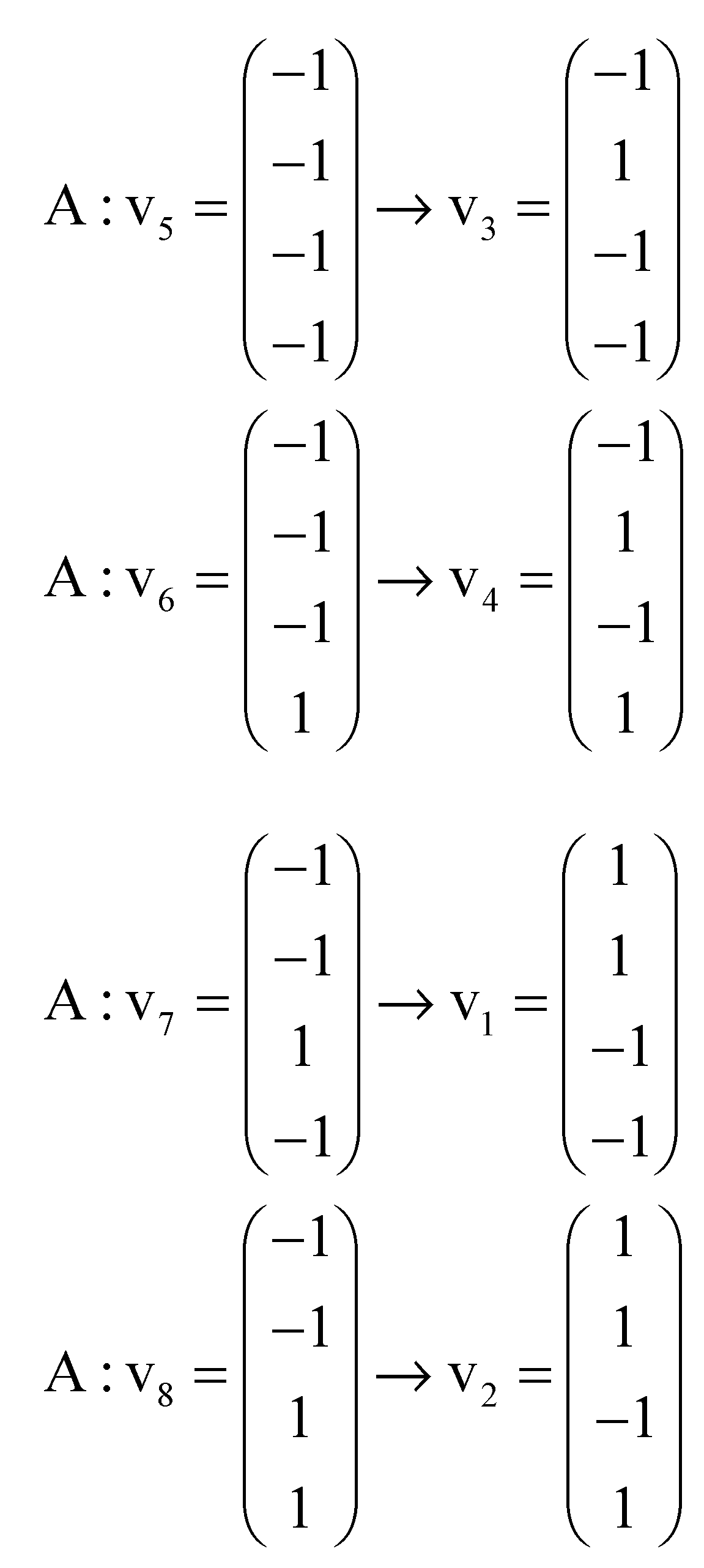
In this case the vertexes of Class 1, colored in red, are the set of six vectors:
which is the union of the square of vertexes with the edge of vertexes And the set of vertexes of Class 2, colored in black, are the set of the ten vertexes:
which is he union of the squares of vertexes and with the edge of vertexes
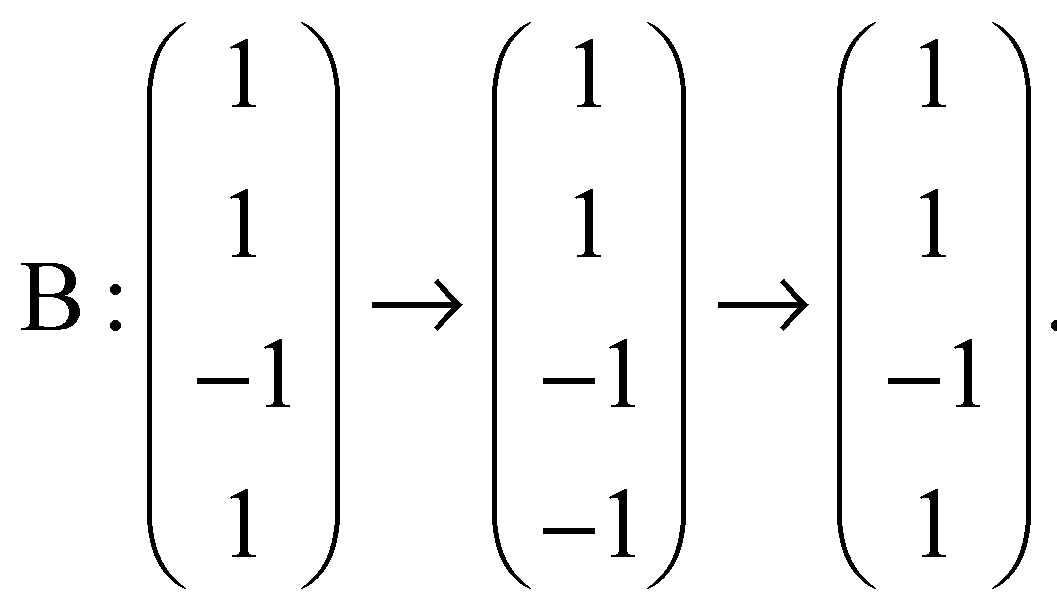
Now, consider the matrix , which represents the same reflection of Part III, through the hyperplane that reverses the axis This reflection changes the sign of the fourth component of each quadruple and it easy to notice that it produces the following interchange of vectors in the Class I of synthetases:
Hence, is a symmetry of the Class I of synthetases in the hypercube
By Theorem 1 it should also be a symmetry of the set of vertexes of Class 2. But it is straightforward to verify that it produces the interchange of vectors:
Then, is also a symmetry of Class 2.
It is not difficult to notice that the reflection is the only symmetry of both Classes 1 and 2. As it is an element of order two, the group , isomorphic to the Abelian group , is, as in the case of Part II, the group of symmetries of the classes of synthetases in the hypercube RNR.
3.6. Conclusions
It has been proved that the groups of symmetries of both classes of synthetases in each of the four hypercubes are the following (Table 5):
3.7. The Genetic 5-dimensional hypercube
The 5-dimensional hypercube is the disjoint union of the 4-dimensional hypercubes and is the subspace generated by the four unitary vectors and is its affine subspace Here the sextuples of zeros and ones have been replaced by triplets of the letters with the following equivalence: . is the binary set is the also binary and is the set
The four triplets are associated to the canonical unitary vectors In Figure 5 they are vectors initiated in the point colored in red, that generate the hypercube The triplet associated to the unitary vector also initiated in and colored in blue, completes the canonical basis of the 5-dimensional hypercube Obviously, the translation associated to convert into its affine subspace colored in blue, and the union of both with is the 5-dimensional hypercube The vertexes of are the triplets or codons that end in a pyrimidine.
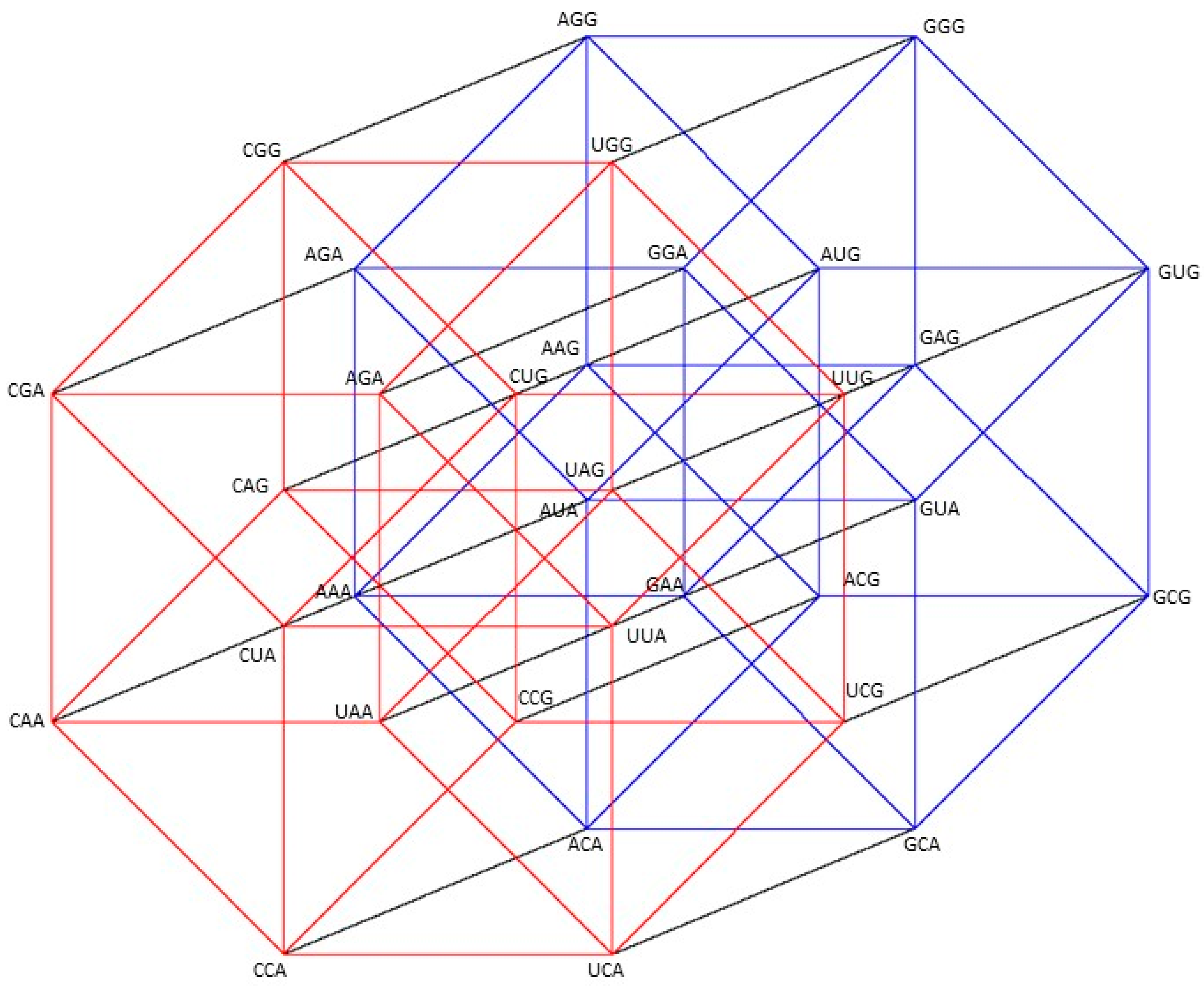
It can be seen that the translation associated to the unitary vector represented by the triplet converts the 5-dimensional subspace into its 5-dimensional affine subspace whose triplets are those that end in a purine (Figure A1). It is the disjoint union of the 4-dimensional hypercubes and It is clear that the 6-dimensional hypercube is the union of the 5-dimensional hypercube with its affine subspace, also a 5-dimensional hypercube, Finally, we have, that is the disjoint union of the four 4-dimensional hypercubes, derived from the primaeval by transversions in the first or the third nucleotide.
Note: The subspace (hypercube) is the solution set of the homogeneous system of two liner equations with the six unknowns Its affine subspace (hypercube) is the solution set of the non-homogeneous system also of rank 2, with the same six unknowns.
The 5D hypercube (see Figure A1) is obtained by the translation that converts every triplet that ends in pyrimidine into other that ends in purine, obtaining the hypercube It represents the disjoint union of the subcodes and Note that this hypercube contains the stop codons and The disjoint union of and is equal to the 6D hypercube that represents the entire SGC. For the 6D genetic code each triplet is mapped into sextuples of o´s and 1’s. This hypercube is the set isomorphic to which is the binary vector space over the binary field
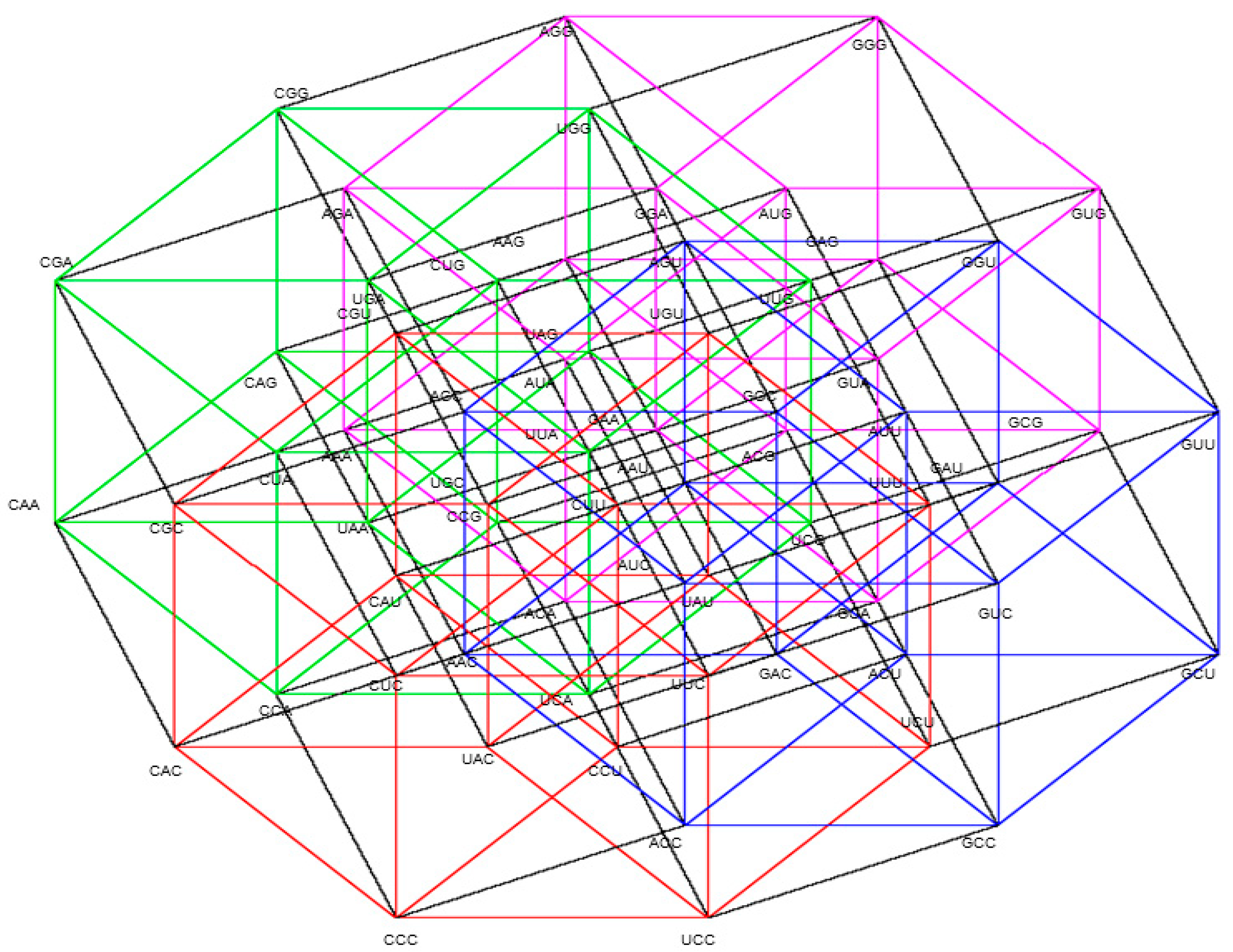
Figure 5.
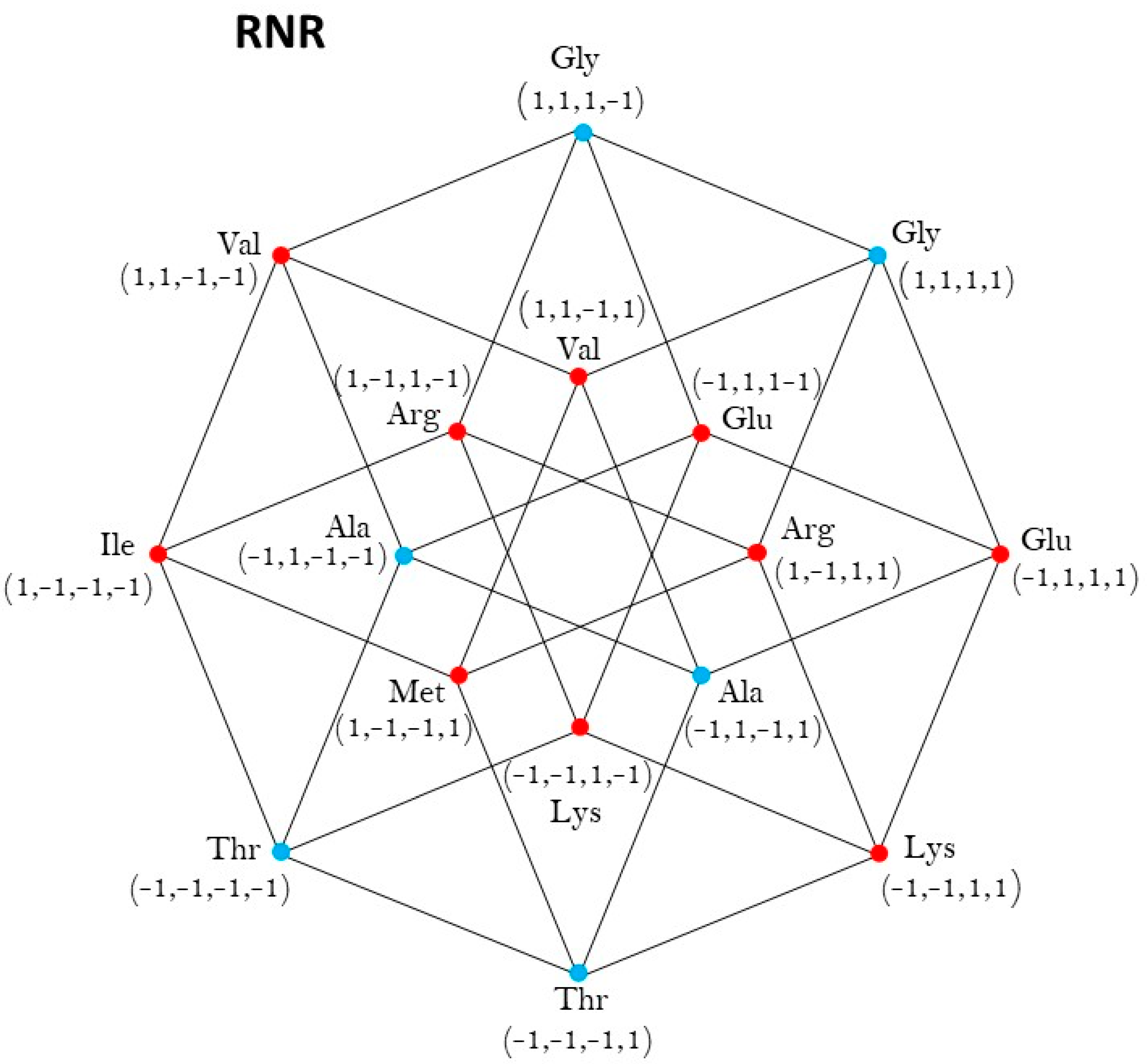
The five-dimensional hypercube of triplets which is the union of the 4-dimensional hypercubes and is obtained from the by means of transversion of each nucleotide at the left of the triplet. is the subspace generated by the four unitary vectors CAC, CUC, CCU, UCC, and is its affine subspace The translation that represents these transversions is situated at an angle of 22.5 degrees with respect to the horizontal axis generated by the canonical vector At this angle none of the vertexes are overlapped.
Figure 5.
The five-dimensional hypercube of triplets which is the union of the 4-dimensional hypercubes and is obtained from the by means of transversion of each nucleotide at the left of the triplet. is the subspace generated by the four unitary vectors CAC, CUC, CCU, UCC, and is its affine subspace The translation that represents these transversions is situated at an angle of 22.5 degrees with respect to the horizontal axis generated by the canonical vector At this angle none of the vertexes are overlapped.
The edges of the hypercube
Two vertexes are said to be neighbors if the distance between them is equal to 1. It means that they differ in only one of their n components. An edge of the hypercube is the segment that joins two neighbor vertexes. This segment has a length equal to 1. For every vertex there are neighbors. As there are vertexes, the product would count the total number of edges. But as every edge has two extremes, it would be counted twice. Then, the actual number of edges is equal to . For example, in the ordinary cube, 3-dimensional, the number of edges is 22 × 3 = 12 and, in the 4-dimensional, this number is 23 × 4 = 32.
The faces of the hypercube
Any face of the hypercube is a plane square determined by four vertexes and four edges, in such a way that two edges with a common vertex are orthogonal. If we fix n-2 components with values zeros and ones, and leave free the other two, the four obtained vertexes are the vertexes of a plane square, then, of a face of the hypercube. It may be done in ways. Hence, the total number of different faces is precisely (The combinatorial number is the number of subsets of k elements of a set of n elements, being ). For example, for n=3 the number of faces is 3× 2 = 6, and for n=4 it is 6x4=24.
The hypercube of dimension 6 .
It is the disjoint union of the 5-dimensional and is the subspace generated by the five unitary vectors CAC, CUC, CCU, UCC, ACC and is its affine subspace The vector space is generated by the six unitary vectors CAC, CUC, CCU, UCC, ACC, CCA. They conform the canonical basis of Conversion of the hypercube [0, 1]n in other whose components are ones and minus ones. Multiplying by 2 all the vectors of the space, the set of the vertexes is converted into the set {0, 2}n, of vertexes of the hypercube [0, 2]n whose edges have length 2. Next, performing the substraction of the n-tuple E = (1, 1, …, 1) the hypercube [0, 2]n is converted into [−1, 1]n, which is another hypercube, also with edges of length 2, whose set of vertexes is the set of the n-tuples of ones and minus ones.
Note: The n-tuple E is the opposite vertex, in the hypercube [0, 1]n, of the null vector O = (0, 0, …, 0) The distance between them is the real number which is the diameter of that hypercube. The diameter of a hypercube is the diameter of the hypersphere that circumscribes it-
Actually, the hypercube [−1, 1]n is the image of [0, 1]n under the affine transformation being the identical automorphism. The new hypercube has its center in the origin of coordinates, and its radius is The affine transformation converts every 0 into -1, and the number 1 into itself. The linear transformation is a homothetic transformation of ratio 2, that duplicate the size of every n-dimensional Figure. Its only fixed point is the origin O of coordinates. The affine transformation is also a homothety of ratio 2, whose only fixed point is the point E
A metric in the hypercube
The Hamming Norm and the Hamming Distance defined in The Hamming Norm: The Hamming Norm |u| of a sextuple u = (a1,a2,a3,a4,a5,a6) is defined as the sum in of its components It is equal to the number of ones it has. The only unitary sextuples, that is, of norm equal to 1, are those of the canonical basis.
The Hamming distance. The Hamming distance H(u,v) between two sextuples u = (a1,a2,a3,a4,a5,a6) and v = (b1,b2,b3,b4,b5,b6) is defined as the norm of their module 2 addition. It is equal to the number of places where they differ. It is not difficult to prove that the distance so defined is actually a distance, in the mathematical sense. It means that it has the following properties:
D1) For all (positivity of the distance between two different sextuples and ), and nullity of the distance of a sextuple to itself.
D2) For all (Symmetry)
D3) For (Triangle inequality)
Figure 6.
The 6D representation of the Standard Genetic Code.
Discussion
We have determined the type of symmetries of aaRSs in each of the 4 subcodes of the Extended RNA code type II. We used the 4D representation of each subcode. The RNY subcode has the dihedral group, with 8 symmetries, 4 rotations and 4 reflections. The YNY subcode has the symmetry, with 2 symmetries; The YNR subcode exhibits an octahedral amplified symmetry, with 48 elements, with 24 rotations and 24 roto-reflections (the octahedral classic group contains only 24 rotations); The RNR subcode display the symmetry of the binary group In each subcode, symmetrical distributions of both Classes of aaRSs were found. Indeed, we proved that for each hypercube, the group of symmetries of Class 1 is the same as the group of symmetries of Class 2. This theorem holds for both 5D- hypercubes and for the whole 6D representation of the SGC.
The consideration of stop codons in the determination of the type of symmetry of the subcode is not fortuitous. Mitochondrial codes present variations principally in the codons for the stop signals and unicoded amino acids. The mitochondrial genetic codes of yeast, invertebrates, and vertebrates present variations principally in the codons for the stop signals and unicoded amino acids https://www.ncbi.nlm.nih.gov/Taxonomy/Utils/wprintgc.cgi?chapter=tgencodes#SG24 (accessed on July 31 2023).The stop codons are tricodonic in SGC, tetracodonic in vertebrate mitochondria, and dicodonic in invertebrate and yeast mitochondria.
In computer science, a byte is an octet of 0´s and 1’s, where each bit represents 0 or 1. Hence, in the genetic code a byte would correspond to a sextuple of 0´s and 1’s, where each of them represents a triplet or codon of the nucleotides The presence of stop codons converts the genetic code into an algorithm that carries out the protein synthesis. This means that the whole process of protein synthesis is carried out by a Turing machine, i.e., by a recursive function. Unlike the Turing machine the genetic code has the additional property of heritability. In a forthcoming work we will develop these concepts.
Our work can be regarded as a possible pathway of the distribution of the 2 Classes of aRSs during the formation of the SGC. According to the model of Rodin-Ohno {15 -18], there was a single gene encoding for 2 synthetases: They proposed a single anti-parallel complementary strands of a single base-paired nucleic acid molecule. The Rodin–Ohno model divides the table of the genetic code into two classes of aminoacyl-tRNA synthetases (Classes 1 and 2) with recognition from the minor or major groove sides of the tRNA acceptor stem [15,16,17,18]. According to the table of the genetic code, the RO model is almost symmetric. It turns out that the RO model is symmetric in a six-dimensional (6D) hypercube (José et al. 2017). Conversely, using the same automorphisms, the RO-model can lead to the SGC. Class aaRS 1 (Class aaRS 2) can be converted into Class aaRS II (Class aaRS I) by means of isometric algebraic functions [19]. Notably, the 6D algebraic model is compatible with both the SGC (based upon the primeval RNY code) and the RO model [19].
Author Contributions
Conceptualization, MVJ and ERM; methodology, MVJ and ERM; formal analysis, ERM and MVJ.; investigation, MVJ and ERM; writing—original draft preparation, ERM and MVJ; writing—review and editing, MVJ and ERM; visualization, JRB.; Figures JRB; funding acquisition, MVJ. All authors have read and agreed to the published version of the manuscript.
Funding
M.V.J. was funded by Dirección General de Asuntos del Personal Académico (DGAPA), Universidad Nacional Autónoma de México, UNAM (PAPIIT-IN224015).
Conflicts of Interest
The authors declare no conflict of interest.
Appendix A
Mathematical background
The Euclidean n-dimensional −space, ( , +, *) being the field of real numbers, has a basis the so-called canonical basis, where, for each with 1 in the place and 0 in the remainders.
A remarkable observation: The n-dimensional vector space ( , +, *) is a generalization of the ordinary 3-dimensional −space, ( , +, *) where every triplet represents a point of the space, endowed with a system of axis and pairwise orthogonal or perpendicular, intercepted in a
common point denoted as O and called the
origin of coordinates, represented by the triplet (0,0,0). Usually, every point P is identified with the triplet that represents it, as they were the same object. So, the equality is admitted. The axis are right lines defined as The addition of two points and is defined as . This operation, so defined, is associative, has a neutral element, and for every point its additive inverse exists, such that P + (−P) = O. Then, the ordered pair (, +) is a group. As the addition + is also commutative, it is an Abelian group. The product of a real number by a point is defined as . This external operation, of a real number by a point, has the following algebraic properties:
1. for (Mixed associativity).
2. 1 * P = P, for every (Existence of an external neutral element).
3. for all (Distributivity of the product with respect to the addition of points, also called distributivity at the left).
4. for all (Distributivity of the product with respect to the addition of numbers, also called distributivity at the right.)
The condition of Abelian group for the addition and the four properties of the external operation, completes the structure of a vector space over the field ( , +, ×) of the real numbers, in the set of all the points of the space.
The concept of vector: Given two different points we call the vector of origin and extreme to the oriented segment of right line that joins with It is denoted as We define the addition of two vectors and with common origin P as the vector such that S = R + Q − P If the points and are not collinear the four points are the vertexes of a plane parallelogram. It means that the lines and are parallel. If the null point the function: where for is defined as a vector whose initial and final points coincide, is a bijective function between the set of all the triplets or points of the space, and the set of all the vectors with origin This correspondence induces over the set the operations + and * of addition and product of numbers by vectors and is endowed the structure of a vector space over the field of the real numbers.
Euclidean norm
The Euclidean norm, module, or length, of a vector v = (x1,x2,…,xn) is defined as the non-negative square root of the sum of the squares of its components.
Main properties of the Euclidean norm
N1) For every v, and it is =0 if, and only if, v = 0 the null vector O = (0, 0, 0, …, 0) (Positivity of the norms for all the non-null vectors)
N2) For and , (The norm module, or absolute value, of the real number is the positive of the couple and, for
From N2 we have that for every .
N3) For all (Triangle inequality).
The Euclidean Distance between vectors
For the Euclidean distance between their extremes, is defined as
Main properties of the Euclidean distance
D1) For every v, being the null vector = (0, 0, …, 0) (Positivity of the distance to the origin for all the final points of the non-null vectors).
D2) For all (Symmetry).
D3) For all (Triangle inequality).
With this distance the set of vectors, is a metric space and the vector space is called the n-dimensional Euclidean Vector Space.
Linear transformations
A function f: is called a linear transformation, or linear endomorphism, if it has the following property:
For all and , the equality holds.
Note: The latter condition is equivalent to the two conditions:
L1) f(u+v) = f(u) + f(v), for all . (This means that f is a group homomorphism of the additive group ( , +) onto itself).
L2) f(α*u) = α*f(u) for all and
If the function f is bijective, the linear transformation is a linear isomorphism, and it is called a linear automorphism of the vector space.
Matrix representation of a linear transformation
For every endomorphism f there is a unique square matrix such that for every j, being the j-th column of Then, is a matrix whose columns are the column matrixes associated of the vector images of the canonical unitary vectors. It is called the matrix of f with respect to the canonical basis. It will be denoted as A = [f] In the case of an automorphism the matrix is a non-singular or invertible matrix, hence, its determinant is different from 0.
For every vector v = (x1,x2,…,xn) the column matrix is taken as the matrix representation of It is well known that the matrix representation of the image vector is the matrix product Conversely, every square matrix defines an endomorphism f, whose matrix representation [f] is
Translations
For any vector the translation defined by is the function such that, for all For every u, is a bijective function that preserves the norm of each vector and the distance between different vectors of the space. Hence, it is an isometry of the Euclidean vector space. For two translations and the composition is equal to the translations The correspondence between and the set T, of all the translations, is a bijective function, that induces over T the structure of a n-dimensional vector space, isomorphic to the Euclidean n-space ( , +, *)
The concept of affine transformation
An affine transformation is a function that is a composition of a linear endomorphism f, followed by a translation It acts over every vector as The affine transformation is bijective if, and only if, its linear part f is an automorphism. The set of all the affine transformations of the vector space ( , +, *) will be denoted as . The composition of two affine transformations and acts over a vector in the form:

Then, the composition is the affine transformation . Hence, we have the equality
We see that the composition of two affine transformations is an affine transformation. Then, the composition is an inner operation in the set . As the operation is associative and its neutral element, the identity function I, is the affine transformation the ordered pair ( ) is a monoid, or semigroup with neutral element.
Matrix representation
The matrix representation of the affine transformation is given by the composition being the matrix of which acts over the matrix of a vector as
The conjugated of a translation by a linear automorphism
The conjugated acts over any vector as Then The latter means that the group of translations ( ) is a normal subgroup of the group being the set of all the invertible affine transformations, and the group of all the linear automorphisms of the space ( , +, *) The group that is called the affine group of the space ( , +, *) is a subgroup of the group of all the bijective transformation of the set It contains as a normal subgroup, the group ( ) of all the translations. In fact, it is the semidirect product of the group ( ) with the group of all the linear automorphisms. (A group is semidirect product of its subgroups and if and is a normal subgroup of The semidirect product will be denoted as Then, The affine group is the group of invertible elements of the monoid ( ).
The n-dimensional binary hypercube.
The binary vector space vector space over the binary field is also called the n-dimensional binary hypercube. Its set of vertexes coincides with the set {0,1}n of the n-tuples of zeros and ones. This set is a subset of the set of all the n-tuples of the whole numbers. The set determines the Abelian group ( , +) subgroup of the additive group of the n-dimensional Euclidean n-space .
The n-dimensional hypercube, whose vertexes are the elements of the set {0,1}n is defined as the convex closure [0,1]n of the set Here, denotes the closed interval of the real numbers between 0 and 1. The convex closure of a set is the minimal convex set that contains it.
A convex set is a set that, for two different elements a and of the segment that joins them is entirely contained in C.
The center of the hypercube [0,1]n is the point obtained by the sum of the 2n vertexes divided by 2n. That is so because, for every place i of the n-tuples, 2n−1 of them, that is, the half, have 1, and the other 2n−1 have 0. Then, for each place i, the quotient is
Figure A1.
Five-dimensional hypercube NNR Figure 5. The five-dimensional hypercube of triplets which is the union of the 4-dimensional hypercubes and
Figure A1.
Five-dimensional hypercube NNR Figure 5. The five-dimensional hypercube of triplets which is the union of the 4-dimensional hypercubes and
References
- Ibba M, SÖll D (2000) Aminoacyl-tRNA synthesis. Annu Rev Biochem 69:617–650. [CrossRef]
- Cusack S, Berthet-Colominas C, Hartlein M, Nassar N, Leberman R (1990) A second class of synthetase structure revealed by X-ray analysis of Escherichia coli seryl-tRNA synthetase at 2.5 A. Nature 347:249–255. [CrossRef]
- Eriani G, Delarue M, Poch O, Gangloff J, Moras D (1990) Partition of aminoacyl-tRNA synthetases into two classes based on mutually exclusive sets of sequence motifs. Nature 347:203–206. [CrossRef]
- Burbaum JJ, Schimmel P (1991) Structural relationships and the classification of aminoacyl-tRNA synthetases. J Biol Chem 266:16965–16968.
- Ribas de Pouplana L, Schimmel P (2001a) Two classes of tRNA synthetases suggested by sterically compatible dockings on tRNA acceptor stem. Cell 104:191–193. [CrossRef]
- Ribas De Pouplana L, Schimmel P (2001b) Operational RNA code for amino acids in relation to genetic code in evolution. J Biol Chem 276:6881–6884. [CrossRef]
- Ribas de Pouplana L (2020) The evolution of aminoacyl-tRNA synthetases: From dawn to LUCA. In Enzymes 48, 11–37, Academic Press.
- Schimmel P, Giege R, Moras D, Yokoyama S (1993) An operational RNA code for amino acids and possible relation to genetic code. Proc Nat Acad Sci USA 90(19):8763–8768. [CrossRef]
- José M.V., Román J.R., Zamudio G.S., Farías S.T. Symmetrical Distributions of Aminoacyl-tRNA Synthetases during the evolution of the Genetic Code. Theory in Biosciences (2023). [CrossRef]
- José MV, Morgado ER, Govezensky T. (2007) An extended RNA code and its relationship to the standard genetic code: an algebraic and geometrical approach. Bull. Math. Biol. (2007). 69:215–243. [CrossRef]
- José M.V., Morgado E.R., Govezensky T. Genetic Hotels for the Standard Genetic Code: Evolutionary Analysis based upon Novel Three-dimensional Algebraic Models. Bull. Math. Biol. (2011). 73: 1443-1476. [CrossRef]
- Nirenberg MW, Matthaei JH. (1961) The dependance of cell-free protein synthesis in E. coli upon naturally occurring or synthetic polyribonucleotides. Proc. Natl Acad. Sci. USA 47, 1588–1602. [CrossRef]
- Nagel GM, Doolittle RF (1995) Phylogenetic analysis of the aminoacyl-tRNA synthetases. J Mol Evol 40:487–498. [CrossRef]
- Woese CR, Olsen GJ, Ibba M, SÖll D (2000) Aminoacyl-tRNA synthetases, the genetic code, and the evolutionary process. Microbiol Mol Biol Rev 64:202–236. [CrossRef]
- Rodin SN, Ohno S (1995) Two types of aminoacyl-tRNA synthetases originally encoded by complementary strands of the same nucleic acid. Orig Life Evol Biosph 25:565–589. [CrossRef]
- Rodin SN, Rodin AS (2008) On the origin of the genetic code: signatures of its primordial complementarity in tRNAs and Aminoacyl tRNA synthetases. Heredity 100:341–355. [CrossRef]
- Rodin AS, Rodin SN, Carter CW (2009) On primordial sense–antisense coding. J Mol Evol 69(5):555–567. [CrossRef]
- Carter CW Jr et al (2014) The Rodin-Ohno hypothesis that two enzyme superfamilies descended from one ancestral gene: an unlikely scenario for the origins of translation that will not be dismissed. Biol Direct 9:11. [CrossRef]
- José MV, Zamudio GS, Morgado ER (2017) A unified model of the standard genetic code. R Soc Open Sci. 4:160908. [CrossRef]
Figure 1.
aaRSs distribution in code Class 1 (red, 2 amino acids) and Class 2 (blue, 6 amino acids). Graphic representation of the subsets and First 4-dimensional hypercube of the code: .
Figure 1.
aaRSs distribution in code Class 1 (red, 2 amino acids) and Class 2 (blue, 6 amino acids). Graphic representation of the subsets and First 4-dimensional hypercube of the code: .
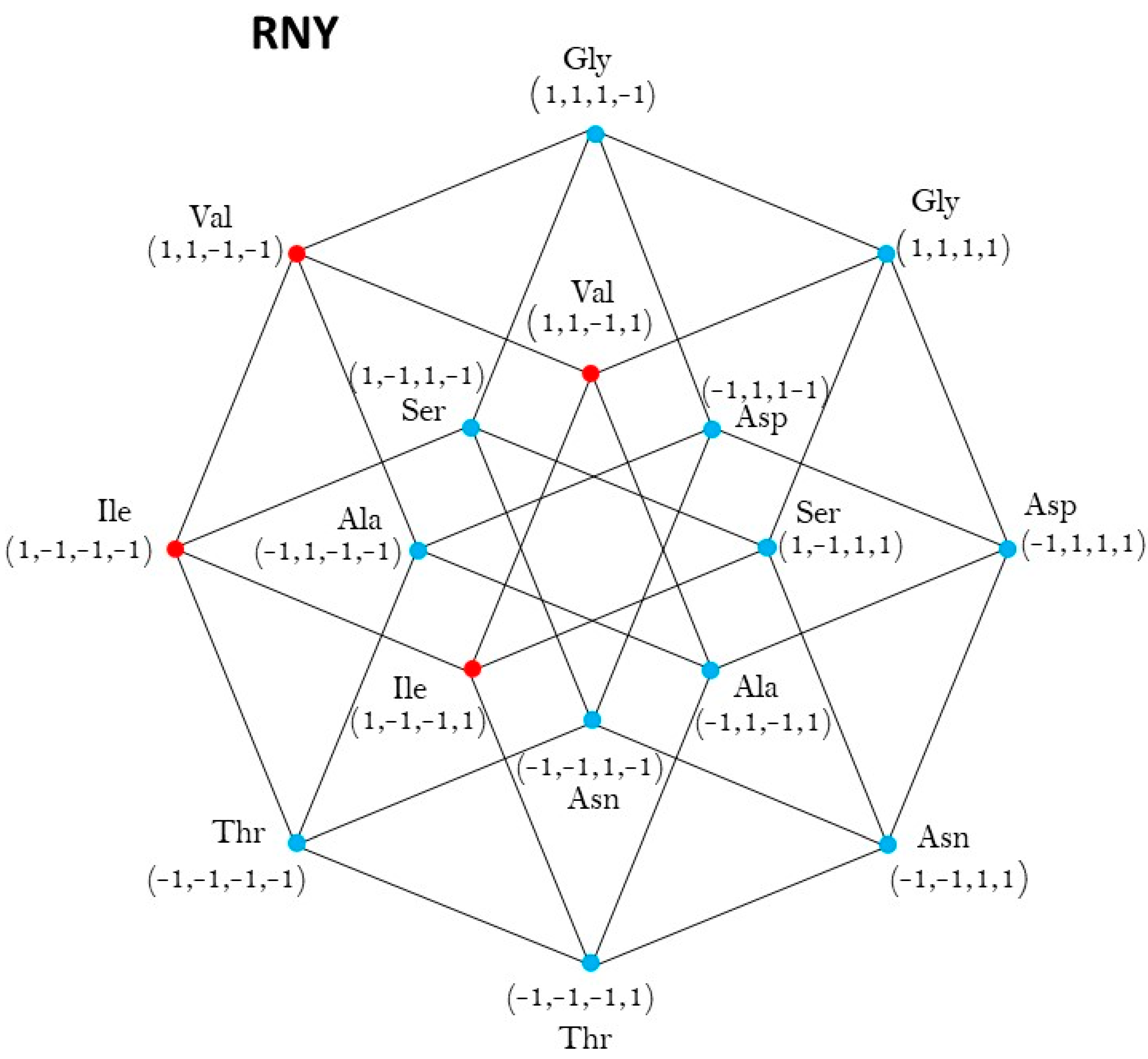

Table 1.
Genetic code: Triplets and amino acids in each of the 4-, 5-, and 6-dimensional hypercubes. aaRS Class 1, red *; aaRS Class 2, blue **.
Table 1.
Genetic code: Triplets and amino acids in each of the 4-, 5-, and 6-dimensional hypercubes. aaRS Class 1, red *; aaRS Class 2, blue **.
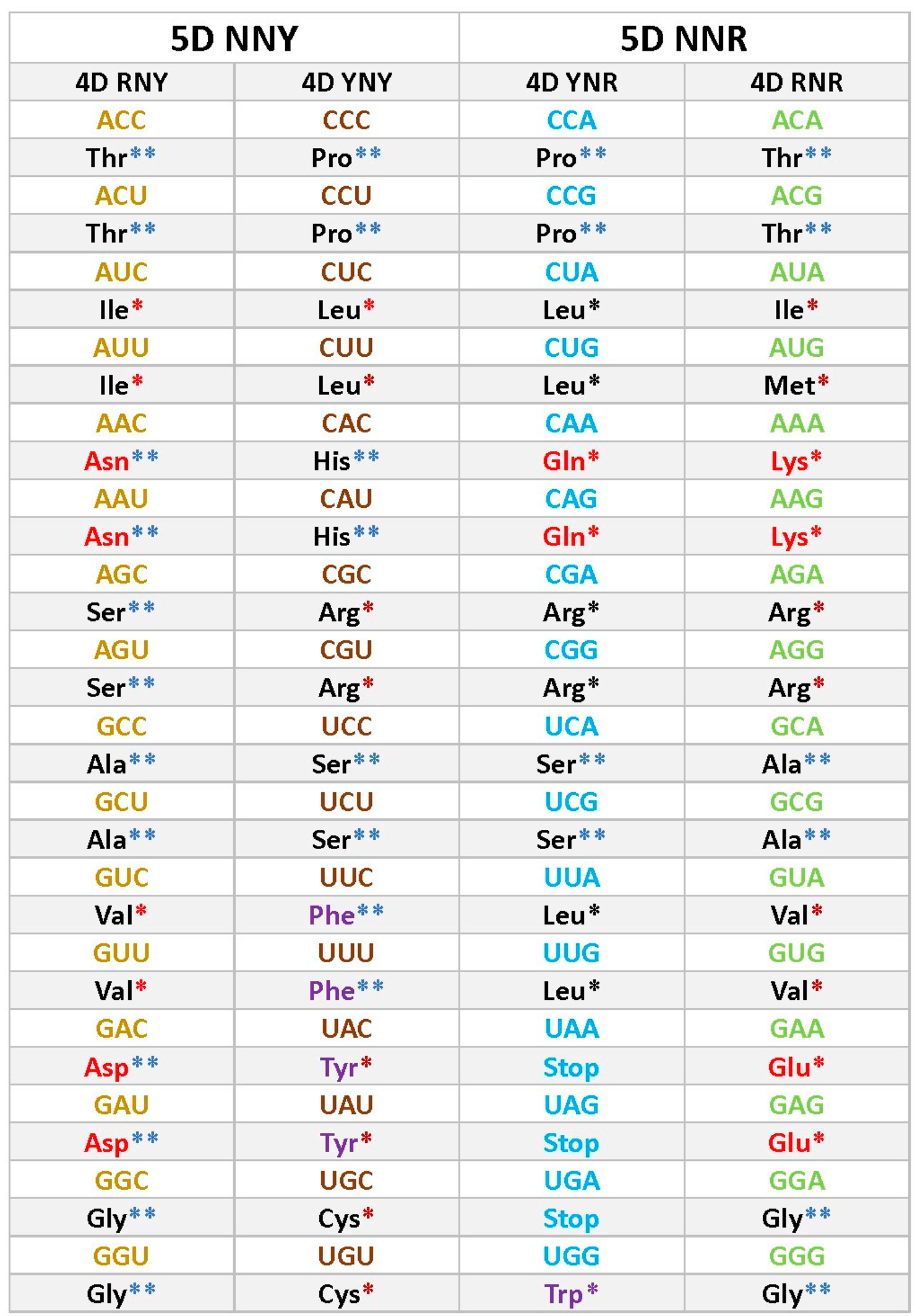 |
Table 2.
The Cayley tables of sum and multiplication of the binary set .
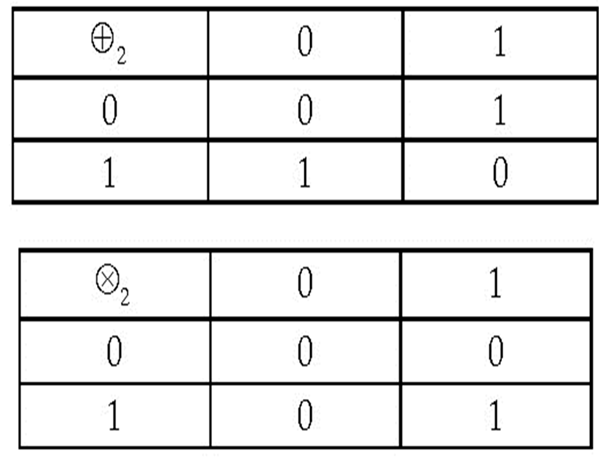 |
Table 3.
Sum module 2 of nucleotide bases.
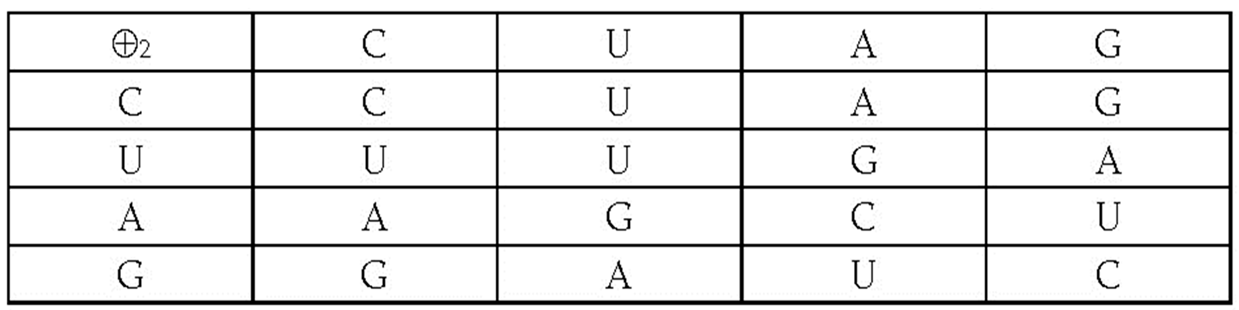 |
Table 4.
Classes and subclasses of aminoacyl tRNA synthetases.
 |
Table 5.
Summary of symmetry groups of aaRSs for each subcode.
| Hypercube | Group of symmetries |
| RNY | |
| YNY | |
| YNR | |
| RNR |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



