
Submitted:
15 September 2023
Posted:
18 September 2023
You are already at the latest version
Abstract
The cities of the future are places of sustainable mobility and a continuous reduction in the amount of harmful substances entering the surrounding environment. Current emission models are mainly dedicated to fully combustion vehicles and do not fully reflect the actual emissions of vehicles in the fleet, which is becoming increasingly diverse. The increasing share of hybrid and electric vehicles is generating the need to measure emissions and energy consumption from these vehicles and to develop new emission models that are accurate. This problem mainly concerns low-emission zones in cities, where mobility planning should be based on simulation models that are based on a continuously updated database. This work concerns the proposal of a two-dimensional model of emissions from hybrid vehicles using artificial neural networks for low-emission zones. The results can be used to further develop such emission models.
Keywords:
vehicles
; emission modelling
; traffic simulation
; air pollution
; future cities
; neural network
1. Introduction
Cities around the world are pursuing sustainable development goals, particularly in the context of sustainable mobility. Urban mobility is becoming a key aspect of urban transformation [1]. The concepts of the cities of the future involve not only the development of new technologies and innovations but also the revision of traditional approaches to urban planning and traffic management [2]. The aim of the cities of the future is to create an urban environment that is people-friendly, energy-efficient, and at the same time reduces negative environmental impacts [3,4]. Sustainable mobility includes reducing vehicle emissions by reducing congestion, improving accessibility to public transport, and developing alternative forms of mobility, such as electric scooters, bicycles, and car sharing [5,6].
One way of dealing with the problems of increased emissions in cities is by creating so-called low emission zones [7]. These zones are areas within a city where vehicle emission standards are regulated. The purpose of these zones is to reduce the impact of urban transport on air quality and to promote cleaner transport technologies [8]. By reducing vehicle emissions, greenhouse gas emissions are also reduced to a large extent. This is important in the context of climate change. Zones encourage the use of lower-emission vehicles, such as hybrid or electric vehicles, which reduces CO2 emissions [9]. The implementation of low-emission zones is a complex process that requires appropriate infrastructure, monitoring of vehicle emissions, regulation, and education of drivers and residents. As cities strive to create more friendly and sustainable urban environments, low-emission zones are an important instrument to achieve these goals by controlling emissions and promoting cleaner transport solutions. An example of a low-emission zone is the City of London, where the city has introduced the 'London Ultra Low emission Zone', which covers the inner city and aims to significantly reduce vehicle emissions [10]. The introduction of this zone has contributed to a significant improvement in air quality in London. Another example is the city of Berlin, which has introduced the 'Umweltzone', which covers a large area of the city [11]. It introduces requirements for vehicle emission standards, meaning that only vehicles that meet certain standards are allowed to enter certain areas of the city [12].
By meeting these goals and evaluating them, it is possible to influence the quality of life of residents. Properly designed and managed transport systems reduce queuing times, improve accessibility to jobs and services, and significantly reduce negative impacts on public health. Reducing greenhouse gas emissions, especially carbon dioxide, also helps combat climate change.
One of the main challenges for the cities of the future is to reduce harmful emissions and promote more efficient use of energy in road transport. Most current emission models focus mainly on combustion vehicles [13]. These models are not fully adequate to represent the diverse vehicle ecosystem, which includes an increasing share of hybrid and electric vehicles. By way of example, the model [14] describes its process based on road emissions for internal combustion vehicles operating on petrol, diesel, and LPG (liquefied petroleum gas). The model has an increased level of detail because it is based on local data, while it does not take into account alternative propulsion systems such as hybrids at all. Another example is the work [15]. The study focusses on adapting the US-EPA's MOVES emissions model for use in Hyderabad, India, by addressing the disparities in driving conditions and vehicle-specific factors. The default model, based on US driving cycles, is not representative of India's unique driving conditions. To rectify this, the researchers incorporated a modified Indian Driving Cycle' and local driving cycles for light-duty vehicles, resulting in revised emission rates.
Most of the work actually addresses the problem of creating emission models, but does not consider the creation of new models for new types of vehicles [16,17]. As a result, there is a gap and a need to develop more accurate emission models that take into account the diversity of vehicles (hybrid propulsion) in urban low-emission zones.
In the context of developing new emission models, it is necessary to use them skillfully for traffic simulation purposes. For the planning of new solutions or the modification of existing solutions in cities, simulation of vehicle and pedestrian traffic is carried out in order to forecast traffic flow and safety for future investments. As an example, the work [18] presents the traffic simulation problem of autonomous vehicle traffic simulation in the context of emission generation. This work concerns the analysis of different types of autonomous vehicles and their driving style on NOx, CO2, and PM10 emissions. The simulations in this work were performed in Vissim. Another example of Vissim use in vehicle emissions analyses is [19]. This work concerns analyses of balanced permissiveness solutions at an X junction, for which different methods of giving way to priority for crossing were used. The results show practical recommendations for the applicability of specific traffic signs for the analysis of NOx and PM10 emissions.
Taking into account the information provided above and the work reviewed, this work focusses on the creation of a new CO2 emission model for a hybrid vehicle dedicated to low-emission urban zones, which can be used in combination with traffic microsimulation tools. The emissions model was created using real data from the Portable Emission Measurement System (PEMS) and is based on an artificial neural network method. The model was validated with a coefficient of determination of R2 of 0.73 and an MSE of 0.91. In the next stage of the study, the model was used in a simulation analysis of 3 selected urban traffic solutions for low-emission zones: speed limits at pedestrian crossings, raised crossing zones, and a scenario with traffic slowing down in the form of speed bumps on the carriageway. The CO2 emission results obtained for the simulations studied can serve as initial recommendations for the design of such road solutions.
2. Materials and methods
The general scheme of the work is shown in Figure 1. The work included, in the first stage of the work, preparing the vehicle for test runs with the installed Portable Emission Measurement System (PEMS). The PEMS system was mounted on the rear seat of the vehicle and in its boot. Furthermore, the vehicle was checked for technical performance at a vehicle inspection station before road tests were carried out. An important part of the work was also the preparation of a defined route. The basic requirement for the route was to drive through different parts of the city to collect as much data as possible, which is needed for the CO2 emission model for the hybrid vehicle. The challenge here is additionally that for some parts of the journey the combustion engine is turned off and for some traffic conditions it is switched on. In the next stage of the work, the data was processed and placed in a data repository. For this purpose, a free Github file repository can be used, or the Google Colab data repository. A CO2 model was then created using the Tensorflow/Keras libraries, which are available for the Python programming language. The model was validated using the R2 coefficient of determination and MSE. Then, 3 moments of potential solutions that are used in current cities and will be used in future cities were made in Vissim software. Scenarios were modelled for speed bumps, raised intersections, and speed limits at pedestrian crossings. For these simulation scenarios, the developed CO2 emissions model was used to map the emissions that are generated by vehicles. In relation to the results obtained, the paper makes some recommendations for the applicability of these solutions in future cities.
The PEMS system was used to collect CO2 emissions and vehicle movement data. The vehicle selected for the study is shown in Figure 2. Selected technical parameters of the vehicle are presented in Table 1.
The investigated driving route is presented as a CO2 map in Figure 3. The route was 55 km long, the average speed on this route was 55 km/h, while 3600 data records were generated on it with a recording frequency of 1 s.
The CO2 emissions data collected from the hybrid vehicle for the tested is summarised in a 3d chart in relation to the velocity and acceleration parameter (Figure 4).
2.1. Data collection and processing
The data collected from PEMS was converted to xls format and then transferred to the Google Collaboration file repository. Google Colaboratory, often referred to as Colab, is a free cloud-based platform for working with Jupyter notebooks offered by Google [20]. Colab allows access to popular libraries and tools for machine learning and data analysis, such as TensorFlow, PyTorch, or Pandas, without the need to install and configure a local programming environment [21,22]. The data was split into a learning set and a testing set in an 80/20 ratio, and a neural network technique from the Tensorflow library was used to create the emission model along with integrated Keras. TensorFlow is an open source machine learning platform developed by Google. It is one of the most popular tools for building and training machine learning models and neural network. Two variables: V (Velo-city) and a (acceleration) were used to perform the CO2 prediction model. By using only two explanatory variables, the model created will be more accessible, e.g. for its use with traffic simulation data.
The algorithm used to create the neural network model in the following (Algorithm 1).
| Algorithm 1. CO2 emission model for a hybrid vehicle, source code. |
| import pandas as pd |
| import numpy as np |
| from sklearn.model_selection import train_test_split |
| from sklearn.preprocessing import StandardScaler |
| import tensorflow as tf |
| from tensorflow import keras |
| from tensorflow.keras import layers |
| from sklearn.metrics import mean_squared_error |
| # Load data from the data repository |
| file_path = "/content/hybrid po filtracji.xlsx" # Update this with the actual file path |
| df = pd.read_excel(file_path) |
| # Select features (V and a) and target variable (CO2) |
| X = df[['V', 'a']].values |
| y = df['CO2 g/s'].values |
| # Split the data into training and testing sets |
| X_train, X_test, y_train, y_test = train_test_split(X, y, test_size=0.2, random_state=42) |
| # Standardize the features |
| scaler = StandardScaler() |
| X_train_scaled = scaler.fit_transform(X_train) |
| X_test_scaled = scaler.transform(X_test) |
| # Build the neural network model |
| model = keras.Sequential([ |
| layers.Input(shape=(2,)), # Input layer with 2 features (V and a) |
| layers.Dense(64, activation='relu'), # Hidden layer with 64 neurons and ReLU activation |
| layers.Dense(1) # Output layer with 1 neuron for CO2 prediction |
| ]) |
| # Compile the model |
| model.compile(optimizer='adam', loss='mean_squared_error') |
| # Train the model |
| model.fit(X_train_scaled, y_train, epochs=50, batch_size=32, validation_split=0.2, verbose=1) |
| # Evaluate the model |
| y_pred = model.predict(X_test_scaled) |
| mse = mean_squared_error(y_test, y_pred) |
| print(f"Mean Squared Error: {mse:.2f}") |
From the above neural network model algorithm, we can see which libraries were used in Google Colab. The neural network model is built using the TensorFlow/Keras library. The model contains three layers: an input layer with two features (V and a), a hidden layer with 64 neurones and the ReLU activation function, and an output layer with one neurone (CO2 prediction). The model is compiled using the loss function 'mean_squared_error' (mean square error) and the optimiser 'adam'. This loss is used as a metric to evaluate the model error. The model is trained on the training data using the fit function. Training is done for 50 epochs with a batch size of 32. The model is also dated on a portion of the training data. After training, the model is evaluated on the test data. The mean square error (MSE) result is displayed on the console to assess the accuracy of the model in predicting the target variables on the new data.
2.2. Analysed scenarios
For the data collected and the performed CO2 emission model performed, an additional analysis of its potential use was carried out in the study. Vissim software was used for this purpose. Vissim is a traffic modelling tool for future cities. It is a comprehensive traffic simulation software tool for analysing, planning, and optimising transport systems in urban environments [23,24]. In the cities of the future, where sustainable mobility and efficient traffic management are a priority, Vissim plays a key role. It allows advanced traffic models to be created that take into account different vehicle types, road infrastructure, traffic lights, driver and passenger behaviour, making it possible to simulate the introduction of innovative solutions such as autonomous vehicles and car sharing [25,26]. Vissim assumes 3 scenarios for the use of a CO2 emission model for a hybrid vehicle for exemplary road solutions for low emission zones in cities:
- speed bumps for 4 different deceleration speeds - 30 km/h, 25 km/h, 20 km/h and 15 km/h.
- raised X-shaped intersection.
- road speed limits including pedestrian crossing, tested speeds: 20 km/h, 30 km/h, 40 km/h, 50 km/h.
For the described scenarios, models were prepared in Vissim, for which simulations lasting 3600 s were carried out in order to aggregate the traffic data for further processing for the prepared CO2 emission model. In particular, data were generated from the Vissim software for the position of these vehicles and for their speed and acceleration. The data were saved in .fzp format, allowing it to be further processed in any format, such as .xls or .csv.
3. Results
3.1. Emission model creation and validation
The CO2 emission model was created using the tensorflow/keras library, but subsequent validation was important. Validation of a neural network model is a key step in assessing its effectiveness and ability to make accurate predictions. In this context, two important evaluation measures are often used: the R²-determination coefficient (R-squared) and the mean square error (MSE).
The evaluation of artificial neural network models is a key step in the process of developing and improving them. The actual vs. predicted graph plays an important role in this analysis. It allows us to visually compare how well our model predicts the actual data. The main purpose is to see if the predicted values are close to the actual values, which would indicate the effectiveness of the model [27]. The value of this graph also lies in identifying outlier observations that may be important cases for further analysis. In addition, the graph allows one to assess the linearity of the model's predictions and identify possible non-linear patterns in the data. This graph is shown in Figure 5.
The coefficient of determination R² is a measure that tells us to what extent our model is able to explain the variability in the data. The R² value ranges from 0 to 1, where 0 means that the model does not explain the variation in the data and 1 means that the model perfectly predicts the data. The R² value measures how much of the variability in the target variable is explained by the model [28]. The higher the R² value, the better the model performs in terms of prediction.
where:
R2 – coefficient of determination,
SSM – sum of squares for the model,
SST – total sum of squares,
yt – the actual value of the dependent variable,
y ̅ – predicted values of the dependent variable,
y ̅ – The average value of the actual dependent variable.
The mean square error (MSE) is a measure that determines how much the predicted values differ from the actual values in the data. It calculates the squared error for each observation and then calculates the average of these errors [29]. The MSE is particularly useful for determining how well a model performs in terms of prediction accuracy, and a lower MSE value indicates a better model.
where:
y - the actual value of the dependent variable,
– predicted values of the dependent variable,
n – number of observations.
For the model tested, the R2 coefficient is 0.73, while the MSE is 0.91.
3.2. Simulation results
3.2.1. Speed bumps
The simulations were carried out using Vissim software. The first simulation scenario analysed was speed bumps for four different deceleration speeds: 30 km/h, 25 km/h, 20 km/h and 15 km/h. Traffic barriers are an important element of creating sustainable mobility in the cities of the future. These physical elements of the road infrastructure aim to reduce the speed of vehicles on certain sections of road. Their implementation has several important benefits. First, speed bumps increase road safety by reducing the risk of road accidents and potential human injury and loss [30,31]. Second, they have an impact on controlling exhaust and noise emissions, which contributes to improving air quality in the city. Third, speed bumps introduce elements that slow traffic, which can encourage the use of more environmentally friendly modes of transport, such as cycling and walking [32]. A view of the model is shown in Figure 6, together with an indication of the location of the speed bumps.
The speed bumps were modelled as speed-restricted areas. Speed bumps were placed on a 400 m long road, with a traffic volume of 400 vehicles/h. For the given speed limit zones, a certain area in front of the threshold was set to slow down the vehicle to a given set speed with a deceleration of 3 m/s2. The generated data from the.fzp file was imported into the developed CO2 emissions model into Google Colab. An emissions map was used to develop the CO2 emissions results. A view of the CO2 emissions map for the route section with thresholds is shown in Figure 7.
From Figure 7 we can see:
- areas of increased vehicle emissions in the vicinity of the speed bumps,
- the highest emissions are observed at the threshold where vehicles slow down to the lowest speed of 15 km/h and fluctuate around 6 g/s of CO2,
- the smallest CO2 emissions are for the threshold where vehicles slow down to 30 km/h,
- based on these emission maps, we can better adjust the locations of pedestrian crossings around speed bumps to minimise the impact of vehicle spikes on pedestrians.
3.2.2. Raised intersection
The raised intersection is an innovative solution in the context of future urban mobility, which contributes to improving traffic flow and increasing safety at intersections. It is characterised by a raised level of the road surface, creating a kind of platform element that raises the level of the carriageway to the level of the pavement or cycle path [33]. This solution allows to clearly separate the pedestrian and cycling zone from the motor vehicle traffic lane, which increases the safety and comfort of using these means of transport. Furthermore, elevated intersections are often equipped with traffic lights adapted to the needs of pedestrians and cyclists, which promotes sustainable mobility and encourages the use of more environmentally friendly modes of transport [34]. In cities of the future, where the priority is to improve the quality of life of the inhabitants and to reduce traffic congestion and emissions, elevated intersections are a valuable tool in the design of an efficient and person-friendly transport system. A model showing a raised intersection is shown in Figure 8.
The raised intersection was modelled as the usual road sections in Vissim, while speed limit zones were added at the approaches to the intersection and at the intersection itself to simulate vehicle movements and changes in speed. For the 20-m section before the intersection, vehicle speeds were limited to 25 km/h, while at the intersection itself, vehicles travelled at 15 km/h. Additionally, collision fields were set up for simulation so that there were no collision situations between traffic participants. A traffic volume of 400 vehicles/h was established for all roads entering the junction. The results of the hybrid vehicle emissions for the junction under study are shown in Figure 9.
Based on the emission map in Figure 9, it can be observed:
- for the CO2 model from the hybrid vehicle, low or zero emissions are visible for the approach roads; this is related to approaching the intersection, braking the vehicle, and switching on the electric motor,
- for junction exit roads, areas of increased CO2 emissions, which in places exceed 6 g/s, can be seen after driving through the elevated part of the junction,
- based on the observation of the vehicle emission map, it is possible to look for places where these emissions are lower, making it possible to place pedestrian crossings even better to minimise the impact of exhaust fumes on the health of pedestrians.
3.2.3. Speed limits on the road with pedestrian crossings
Vehicle speed limits play a key role in modern mobility in the cities of the future. They have a significant impact on many aspects, including road safety, reduced emissions, improved air quality, and reduced congestion [35]. Lower speeds also improve the quality of life of residents by reducing traffic noise [36]. To analyse the use of the developed hybrid vehicle CO2 emission model, road models were prepared in Vissim, for which speed limits were established and pedestrian crossings added. In total, driving speeds were tested: 20 km/h, 30 km/h, 40 km/h, 50 km/h. The road models can be seen in Figure 10.
The modelled roads are each 200 m long, but are cut through with pedestrian crossings at two locations. Pedestrians always have priority to enter the carriageway in each case. The volume of vehicle traffic for the roads is 800 vehicles/h, while the volume is 300 pedestrians/h. A visualisation of the CO2 emissions map as a result of the simulated traffic of vehicles and pedestrians is shown in Figure 11.
Based on the map of the CO2 emission map in Figure 11 for the roads studied, it can be observed:
- the lowest CO2 emissions for the case of a road with a speed limit of 20 km/h, which is caused by the operation of the vehicle on an electric motor,
- the highest CO2 emissions for the case of a road with a speed limit of 50 km/h, which exceeds 6 g/s in places,
- in the emission maps, it is possible to see in detail where the highest emissions accumulate, which is caused by the operation of the hybrid drive system, and where increased emissions of other exhaust components can also be observed.
4. Discussion
This paper presents the methodology and the process of developing a CO2 emissions model for hybrid vehicles using an artificial neural network technique. In cities of the future, where sustainable mobility and minimisation of negative environmental impacts are a priority, the development of such models becomes crucial. The discussion of this model aims to highlight its potential applications and implications in the area of road element analysis and the planning of future cities.
Today's cities face unique challenges related to road traffic and greenhouse gas emissions. CO2 emission models, based on artificial neural networks, offer a highly accurate and flexible tool that can be adapted to a variety of scenarios and changing conditions. The combination of a CO2 emissions model with traffic simulation tools is also extremely valuable. This makes it possible to assess how different traffic scenarios affect CO2 emissions from vehicles. In this way, city decision-makers and urban planners can accurately analyse the effects of different spatial planning strategies and changes to road infrastructure. This can lead to a more efficient use of resources, fewer traffic congestion and, above all, lower emissions of harmful substances and CO2.
Examples of related work include [37]. The authors propose an efficient methodology to construct a CO2 emission model. This model creation process, rooted in the evaluation of various methods, including linear and robust regression, fine, medium, and coarse tree models, cubic support vector machines, bagged trees, Gaussian process regression (GPR), and neural networks (NNET), identifies GPR as the most suitable approach for modelling CO2 emissions based on road input data. Regression Learner applications from Matlab were used to create the model. Compared to the method presented in this paper, the use of Google Colab allows emissions models to be created and updated much more quickly. The models created there have lower accuracy than the model presented in this study.
Another study is [38]. This study focusses on modelling the CO2 emissions of electric vehicles (EV) and plug-in hybrid electric vehicles (PHEV), in contrast to the CO2 emissions of conventional internal combustion engine (ICE) vehicles, as reported in the existing literature. PHEVs have the advantage of requiring fewer batteries compared to electric vehicles, making them lighter and potentially more efficient.
There is also work that also exploits the potential of model building in Google Colab in the context of emissions modelling, e.g. work [39]. In this work, a CO2 emissions model is created for an LPG vehicle. The model was developed based on previous exploratory data analysis using gradient machine learning techniques. Vehicle speed and engine speed were chosen as key explanatory variables to predict CO2 emissions. The validation process of the model demonstrated its high accuracy, making it a valuable tool for analysing continuous CO2 emissions and generating emission maps for environmental assessment in an urban context. In particular, for the selected gradient boosting method used to model CO2 emissions for an LPG vehicle, the validation indices give an R² score of 0.61 and an MSE score of 0.77, confirming the reliability and precision of the model. However, the method described there and the model validation indices indicate an inferior predictive capability of this model compared to the one described in this work.
Another example of work that addresses emissions from hybrid vehicles is [40]. To enhance accuracy, a novel long-short-term memory (LSTM)-based model named UWS-LSTM has been developed, mitigating the shortcomings of existing approaches. The dataset encompasses more than 20 parameters and a rigorous input feature optimisation process has been used to identify the most influential factors. The results underscore the superiority of the UWS-LSTM model, which reaches an impressive 97.5% accuracy compared to traditional ML.
In conclusion, the development of CO2 emission models using the methodology presented in this work can provide rapid analysis opportunities that can support municipal authorities’ decision-making in the context of shaping mobility in line with the concept of sustainable mobility in cities of the future.
5. Conclusions
This paper presents research in the area of CO2 modelling for hybrid vehicles, applicable to future cities and their low-emission zones. In this research, an artificial neural network technique was used to create a model of CO2 emissions from hybrid vehicles. The work points to the growing importance of sustainable mobility and minimisation of environmental impacts in cities of the future. Adapting emission models to changing traffic conditions and simulating vehicle movements allows accurate analyses of the impact of different urban planning strategies and road infrastructure on CO2 emissions. The paper also presents existing research work and techniques that are being used in the field of emissions modelling, including technologies such as Google Colab and models based on artificial neural networks. The paper points out the benefits of these approaches and presents a novel neural network-based model that achieves high accuracy.
As a result, this article makes a valuable contribution to the development of CO2 emission models for hybrid vehicles, which can contribute to the creation of more sustainable and greener cities of the future and a better understanding of the environmental impact of mobility.
From the results obtained, it can be observed:
- For the model studied, the R2 coefficient is 0.73, while the MSE is 0.91,
- There is a possibility to use the model for the purposes of vehicle traffic analysis with microsimulation tools,
- For the analysed scenarios of speed limits on the road, raised intersections, and speed bumps, we can observe the locations of increased emissions from hybrid vehicles, which allows, for example, better planning of these solutions in cities.
A limitation of the work is the number of vehicles used in the study, so in future it will be necessary to extend the model obtained with new input data. The work also points to the development of a complete hybrid emission estimation software, which will automatically upload the model learning input data and allow direct upload of input files from simulation tools.
Author Contributions
Conceptualization, M.M..; methodology ,M.M..; software, M.M.; validation, M.M.; formal analysis, M.M.; investigation, M.M.; resources, M.M.; data curation, M.M.; writing—original draft preparation, M.M..; writing—review and editing, M.M.; visualization, M.M.; supervision, M.M. All authors have read and agreed to the published version of the manuscript.
Data Availability Statement
Not applicable
Conflicts of Interest
The authors declare no conflict of interest.
Nomenclature
| CO | carbon monoxide |
| CO2 | carbon dioxide |
| NOx | nitrogen oxides |
| MSE | mean square error |
| LPG | liquefied petroleum gas |
| PEMS | Portable Emissions Measurement System |
| PM | particulate matter |
| RDE | Real Driving Emissions |
| R2 | coefficient of determination |
References
- Belli, L.; Cilfone, A.; Davoli, L.; Ferrari, G.; Adorni, P.; Di Nocera, F.; Dall’Olio, A.; Pellegrini, C.; Mordacci, M.; Bertolotti, E. IoT-Enabled Smart Sustainable Cities: Challenges and Approaches. Smart Cities 2020, 3, 1039–1071. [Google Scholar] [CrossRef]
- Kharrazi, A.; Qin, H.; Zhang, Y. Urban Big Data and Sustainable Development Goals: Challenges and Opportunities. Sustainability 2016, 8, 1293. [Google Scholar] [CrossRef]
- Gabaldón Moreno, A.; Vélez, F.; Alpagut, B.; Hernández, P.; Sanz Montalvillo, C. How to Achieve Positive Energy Districts for Sustainable Cities: A Proposed Calculation Methodology. Sustainability 2021, 13, 710. [Google Scholar] [CrossRef]
- Croese, S.; Green, C.; Morgan, G. Localizing the Sustainable Development Goals Through the Lens of Urban Resilience: Lessons and Learnings from 100 Resilient Cities and Cape Town. Sustainability 2020, 12, 550. [Google Scholar] [CrossRef]
- Turoń, K.; Kubik, A.; Folęga, P.; Chen, F. Perception of Shared Electric Scooters: A Case Study from Poland. Sustainability 2023, 15, 12596. [Google Scholar] [CrossRef]
- Jung, J.; Koo, Y. Analyzing the Effects of Car Sharing Services on the Reduction of Greenhouse Gas (GHG) Emissions. Sustainability 2018, 10, 539. [Google Scholar] [CrossRef]
- Fensterer, V.; Küchenhoff, H.; Maier, V.; Wichmann, H.-E.; Breitner, S.; Peters, A.; Gu, J.; Cyrys, J. Evaluation of the Impact of Low Emission Zone and Heavy Traffic Ban in Munich (Germany) on the Reduction of PM10 in Ambient Air. Int. J. Environ. Res. Public Health 2014, 11, 5094–5112. [Google Scholar] [CrossRef]
- Lebrusán, I.; Toutouh, J. Using Smart City Tools to Evaluate the Effectiveness of a Low Emissions Zone in Spain: Madrid Central. Smart Cities 2020, 3, 456–478. [Google Scholar] [CrossRef]
- Cho, S.-H.; Chae, C.-U. A Study on Life Cycle CO2 Emissions of Low-Carbon Building in South Korea. Sustainability 2016, 8, 579. [Google Scholar] [CrossRef]
- Rizki, M.; Irawan, M.Z.; Dirgahayani, P.; Belgiawan, P.F.; Wihanesta, R. Low Emission Zone (LEZ) Expansion in Jakarta: Acceptability and Restriction Preference. Sustainability 2022, 14, 12334. [Google Scholar] [CrossRef]
- Morfeld, P. , Stern, R., Builtjes, P., Groneberg, D. A., & Spallek, M. (2013). Introduction of a low-emission zone and the effect on air pollutant concentration of particulate matter (PM 10)—a pilot study in Munich. Zentralblatt für Arbeitsmedizin, Arbeitsschutz und Ergonomie, 63, 104-115.
- Jiménez-Espada, M.; García, F.M.M.; González-Escobar, R. Citizen Perception and Ex Ante Acceptance of a Low-Emission Zone Implementation in a Medium-Sized Spanish City. Buildings 2023, 13, 249. [Google Scholar] [CrossRef]
- Mądziel, M. Vehicle Emission Models and Traffic Simulators: A Review. Energies 2023, 16, 3941. [Google Scholar] [CrossRef]
- Jaworski, A. , Mądziel, M. & Lejda, K. Creating an emission model based on portable emission measurement system for the purpose of a roundabout. Environ Sci Pollut Res, 2019. [CrossRef]
- Perugu, H. Emission modelling of light-duty vehicles in India using the revamped VSP-based MOVES model: The case study of Hyderabad. Transportation Research Part D: Transport and Environment, 2019; 68, 150–163. [Google Scholar]
- Demir, E. , Bektaş, T., & Laporte, G. (2011). A comparative analysis of several vehicle emission models for road freight transportation. Transportation Research Part D: Transport and Environment, 16(5), 347-357.
- Smit, R. , Ntziachristos, L., & Boulter, P. (2010). Validation of road vehicle and traffic emission models–A review and meta-analysis. Atmospheric environment, 44(25), 2943-2953.
- Beza, A.D.; Maghrour Zefreh, M.; Torok, A. Impacts of Different Types of Automated Vehicles on Traffic Flow Characteristics and Emissions: A Microscopic Traffic Simulation of Different Freeway Segments. Energies 2022, 15, 6669. [Google Scholar] [CrossRef]
- Mądziel, M.; Campisi, T. Investigation of Vehicular Pollutant Emissions at 4-Arm Intersections for the Improvement of Integrated Actions in the Sustainable Urban Mobility Plans (SUMPs). Sustainability 2023, 15, 1860. [Google Scholar] [CrossRef]
- Li, Z. Forecasting Weekly Dengue Cases by Integrating Google Earth Engine-Based Risk Predictor Generation and Google Colab-Based Deep Learning Modeling in Fortaleza and the Federal District, Brazil. Int. J. Environ. Res. Public Health 2022, 19, 13555. [Google Scholar] [CrossRef] [PubMed]
- Ray, S.; Alshouiliy, K.; Agrawal, D.P. Dimensionality Reduction for Human Activity Recognition Using Google Colab. Information 2021, 12, 6. [Google Scholar] [CrossRef]
- Chang, Y.-H.; Zhang, Y.-Y. Deep Learning for Clothing Style Recognition Using YOLOv5. Micromachines 2022, 13, 1678. [Google Scholar] [CrossRef]
- Ziemska-Osuch, M.; Osuch, D. Modeling the Assessment of Intersections with Traffic Lights and the Significance Level of the Number of Pedestrians in Microsimulation Models Based on the PTV Vissim Tool. Sustainability 2022, 14, 8945. [Google Scholar] [CrossRef]
- Chen, C.; Zhao, X.; Liu, H.; Ren, G.; Zhang, Y.; Liu, X. Assessing the Influence of Adverse Weather on Traffic Flow Characteristics Using a Driving Simulator and VISSIM. Sustainability 2019, 11, 830. [Google Scholar] [CrossRef]
- Mądziel, M.; Jaworski, A.; Savostin-Kosiak, D.; Lejda, K. The Impact of Exhaust Emission from Combustion Engines on the Environment: Modelling of Vehicle Movement at Roundabouts. International Journal of Automotive and Mechanical Engineering 2020, 17(4), 8360–8371. [Google Scholar] [CrossRef]
- Severino, A.; Pappalardo, G.; Curto, S.; Trubia, S.; Olayode, I.O. Safety Evaluation of Flower Roundabout Considering Autonomous Vehicles Operation. Sustainability 2021, 13, 10120. [Google Scholar] [CrossRef]
- Hamayel, M.J.; Owda, A.Y. A Novel Cryptocurrency Price Prediction Model Using GRU, LSTM and bi-LSTM Machine Learning Algorithms. AI 2021, 2, 477–496. [Google Scholar] [CrossRef]
- Hajigholizadeh, M.; Moncada, A.; Kent, S.; Melesse, A.M. Land–Lake Linkage and Remote Sensing Application in Water Quality Monitoring in Lake Okeechobee, Florida, USA. Land 2021, 10, 147. [Google Scholar] [CrossRef]
- Zhang, T.; Song, S.; Li, S.; Ma, L.; Pan, S.; Han, L. Research on Gas Concentration Prediction Models Based on LSTM Multidimensional Time Series. Energies 2019, 12, 161. [Google Scholar] [CrossRef]
- Celaya-Padilla, J.M.; Galván-Tejada, C.E.; López-Monteagudo, F.E.; Alonso-González, O.; Moreno-Báez, A.; Martínez-Torteya, A.; Galván-Tejada, J.I.; Arceo-Olague, J.G.; Luna-García, H.; Gamboa-Rosales, H. Speed Bump Detection Using Accelerometric Features: A Genetic Algorithm Approach. Sensors 2018, 18, 443. [Google Scholar] [CrossRef] [PubMed]
- Kim, D.; Jeong, M.; Bae, B.; Ahn, C. Design of a Human Evaluator Model for the Ride Comfort of Vehicle on a Speed Bump Using a Neural Artistic Style Extraction. Sensors 2019, 19, 5407. [Google Scholar] [CrossRef]
- Pirisi, A.; Grimaccia, F.; Mussetta, M.; Zich, R.E. Novel Speed Bumps Design and Optimization for Vehicles' Energy Recovery in Smart Cities. Energies 2012, 5, 4624–4642. [Google Scholar] [CrossRef]
- Lawrence, B.; Fildes, B.; Cairney, P.; Davy, S.; Sobhani, A. Evaluation of Raised Safety Platforms (RSP) On-Road Safety Performance. Sustainability 2022, 14, 138. [Google Scholar] [CrossRef]
- Pérez-Acebo, H.; Ziółkowski, R.; Linares-Unamunzaga, A.; Gonzalo-Orden, H. A Series of Vertical Deflections, a Promising Traffic Calming Measure: Analysis and Recommendations for Spacing. Appl. Sci. 2020, 10, 3368. [Google Scholar] [CrossRef]
- Psaraftis, H.N. Speed Optimization vs Speed Reduction: the Choice between Speed Limits and a Bunker Levy. Sustainability 2019, 11, 2249. [Google Scholar] [CrossRef]
- Gámez Serna, C.; Ruichek, Y. Dynamic Speed Adaptation for Path Tracking Based on Curvature Information and Speed Limits. Sensors 2017, 17, 1383. [Google Scholar] [CrossRef] [PubMed]
- Mądziel, M.; Jaworski, A.; Kuszewski, H.; Woś, P.; Campisi, T.; Lew, K. The Development of CO2 Instantaneous Emission Model of Full Hybrid Vehicle with the Use of Machine Learning Techniques. Energies 2022, 15, 142. [Google Scholar] [CrossRef]
- Doucette, R. T. Doucette, R. T., & McCulloch, M. D. Modeling the prospects of plug-in hybrid electric vehicles to reduce CO2 emissions. Applied Energy 2011, 88, 88–2323. [Google Scholar]
- Mądziel, M. Liquified Petroleum Gas-Fuelled Vehicle CO2 Emission Modelling Based on Portable Emission Measurement System, On-Board Diagnostics Data, and Gradient-Boosting Machine Learning. Energies 2023, 16, 2754. [Google Scholar] [CrossRef]
- Tena-Gago, D.; Golcarenarenji, G.; Martinez-Alpiste, I.; Wang, Q.; Alcaraz-Calero, J.M. Machine-Learning-Based Carbon Dioxide Concentration Prediction for Hybrid Vehicles. Sensors 2023, 23, 1350. [Google Scholar] [CrossRef]
Figure 1.
General scheme of work.
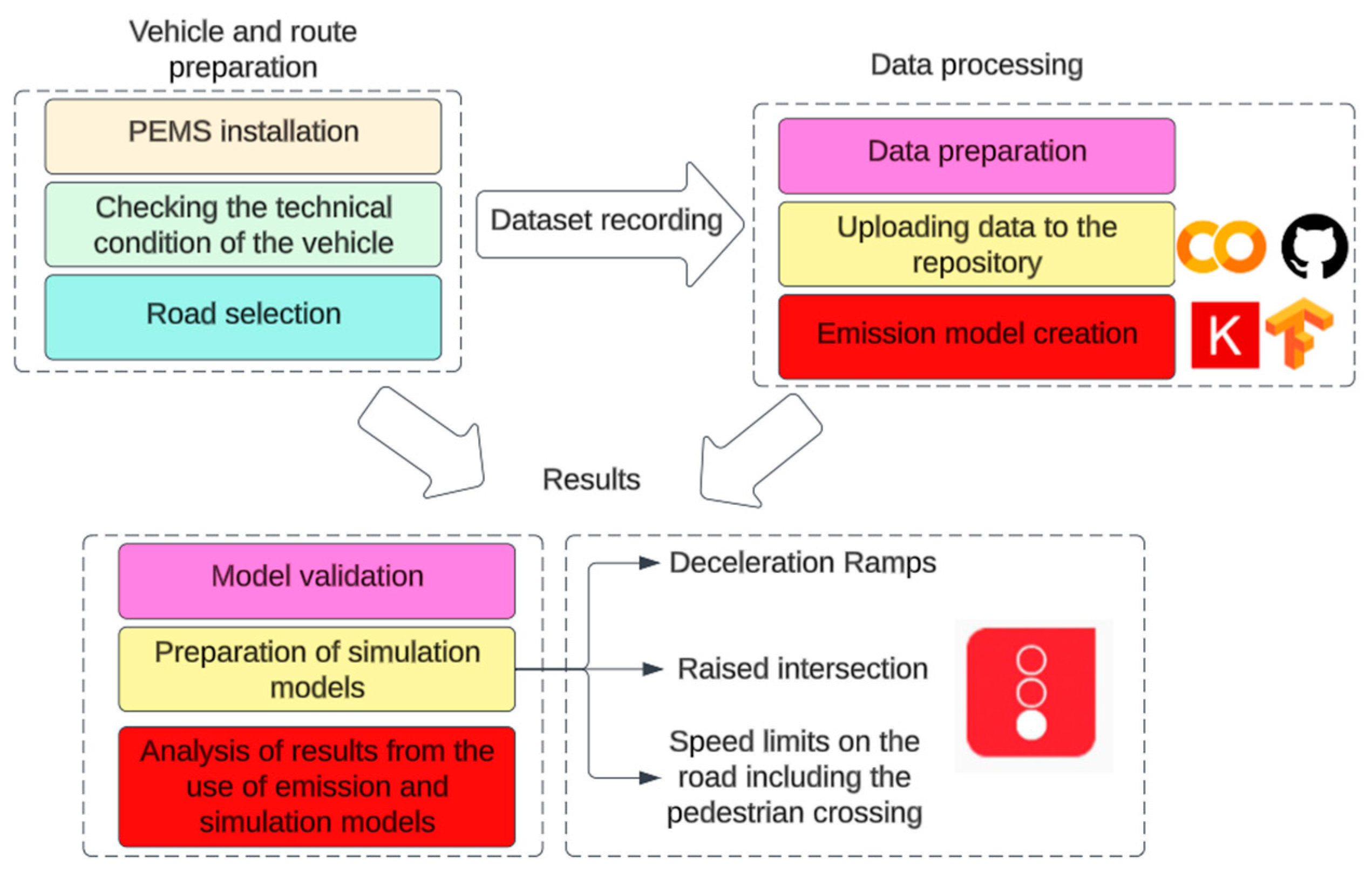
Figure 2.
Test vehicle with PEMS system.
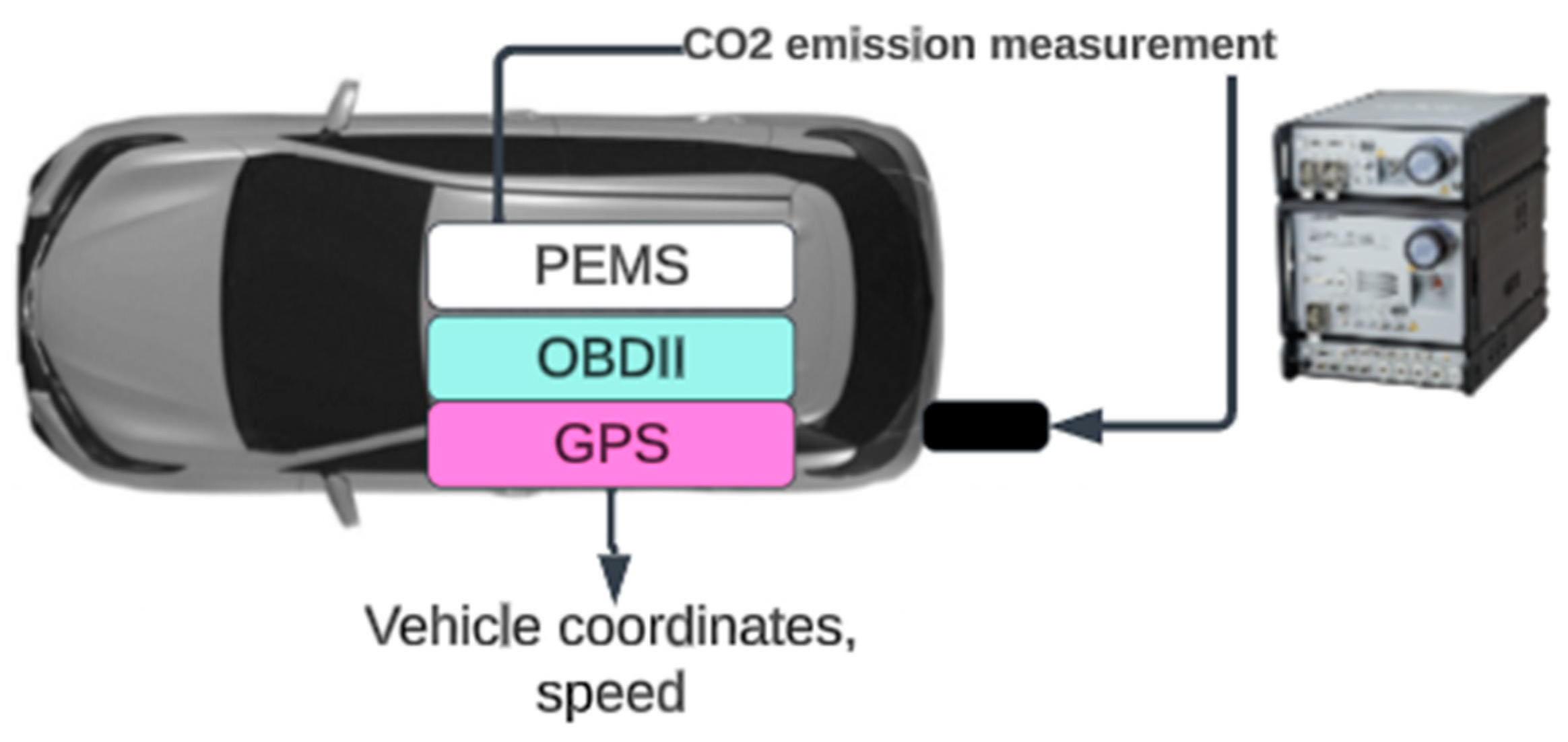
Figure 3.
Tested route with marked CO2 emissions.
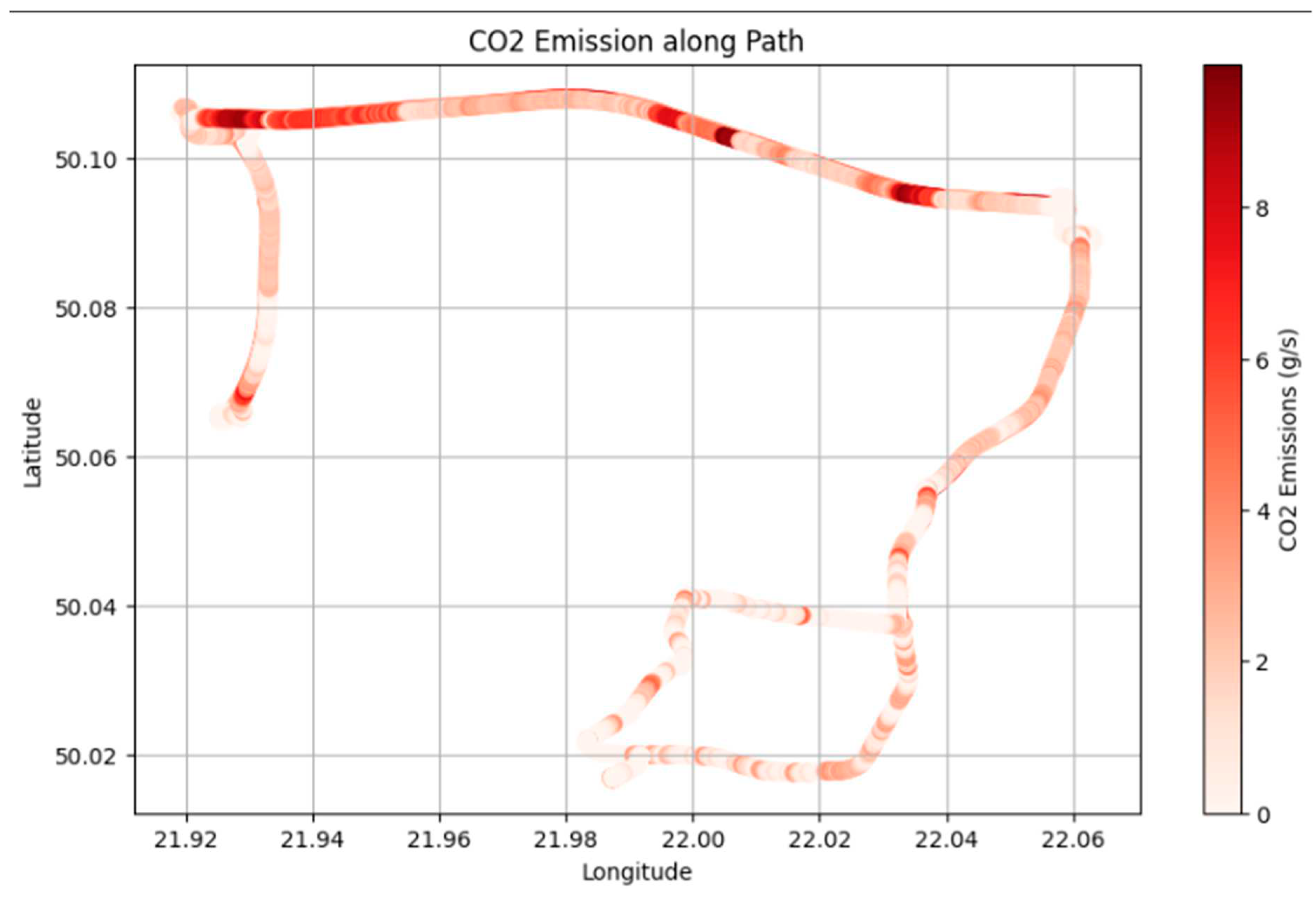
Figure 4.
Velocity vs Acceleration vs CO2 emission plot.
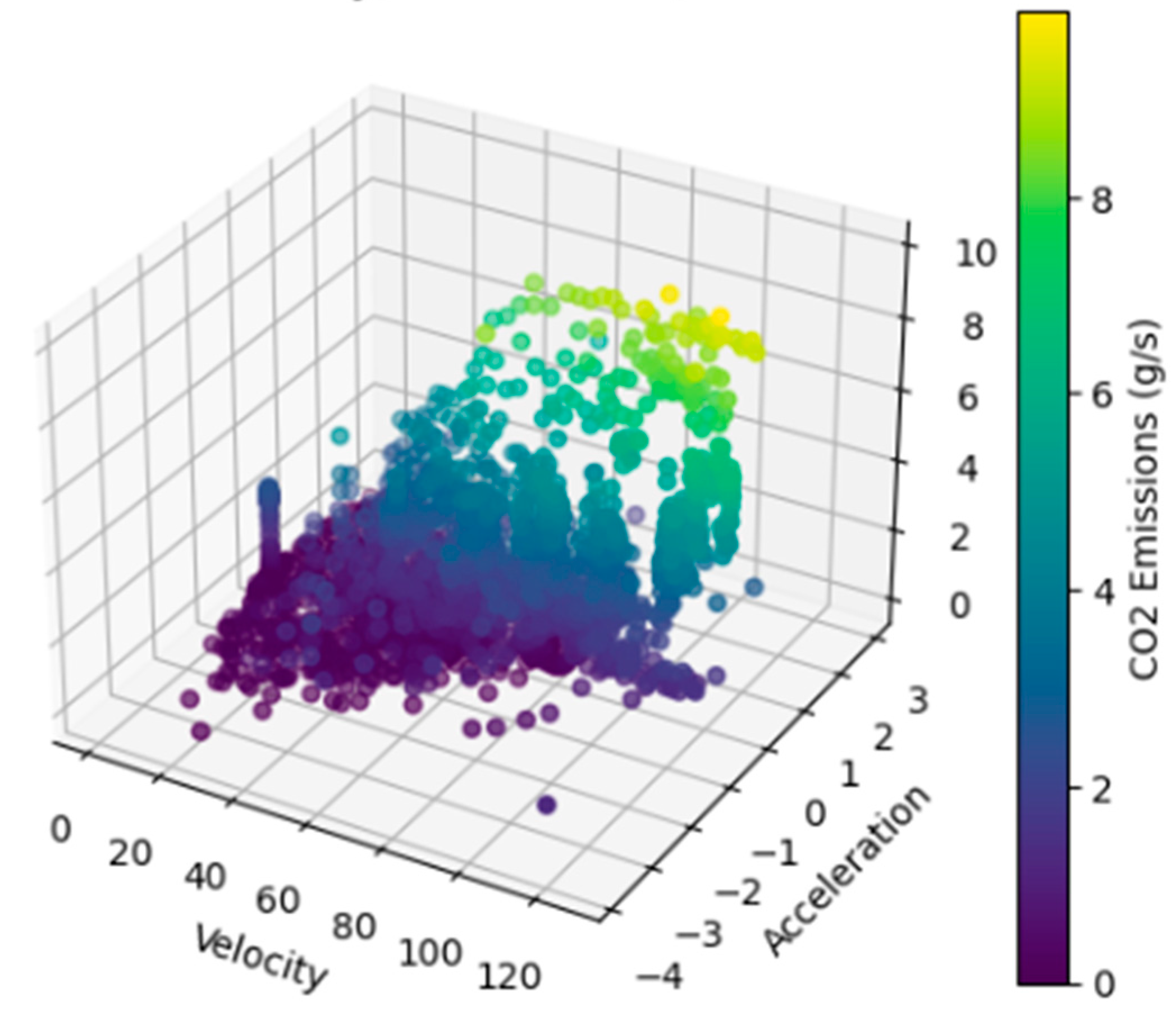
Figure 5.
Actual vs. Predicted plot for CO2 emission.
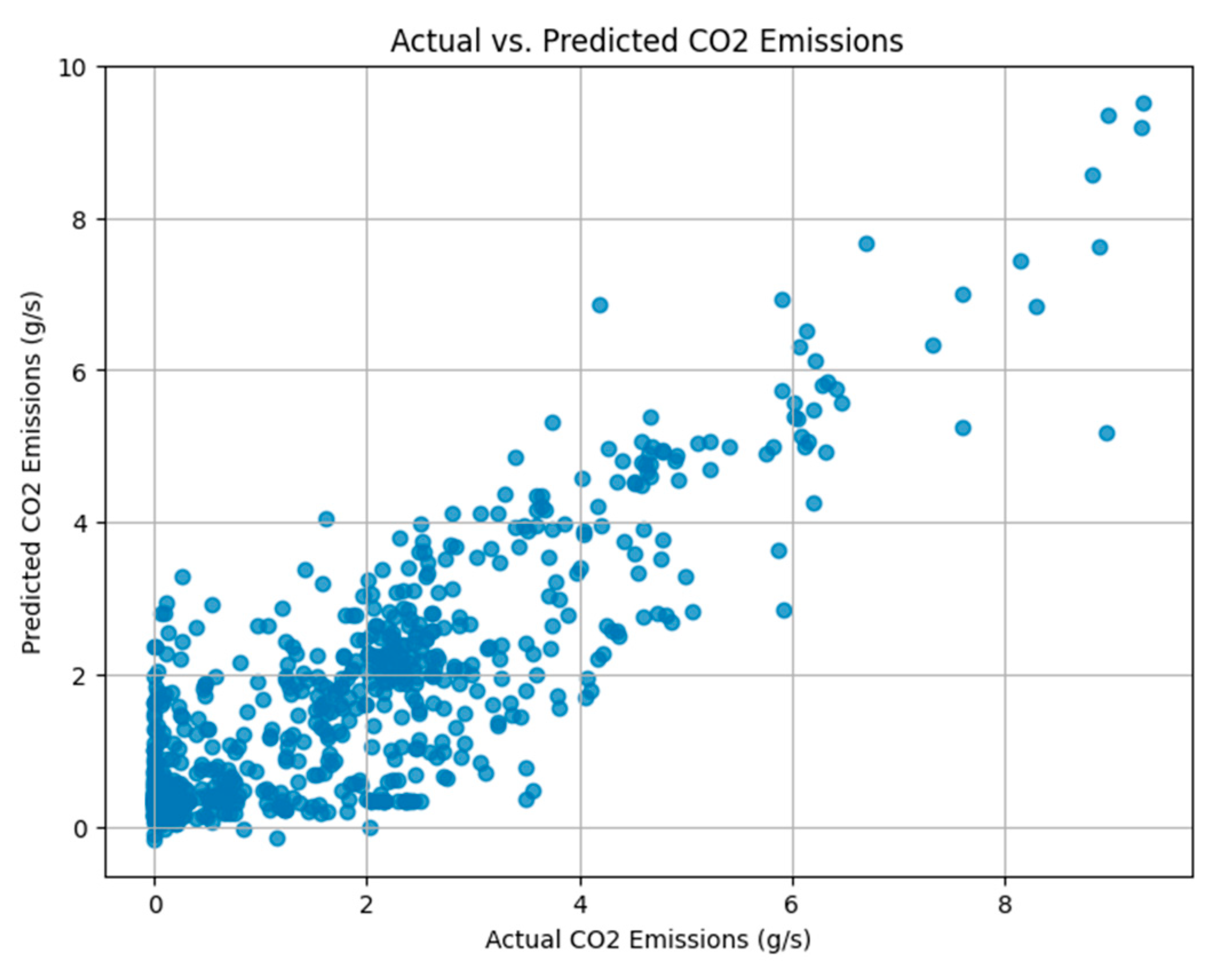
Figure 6.
Modelled speed bumps for the simulation scenario.
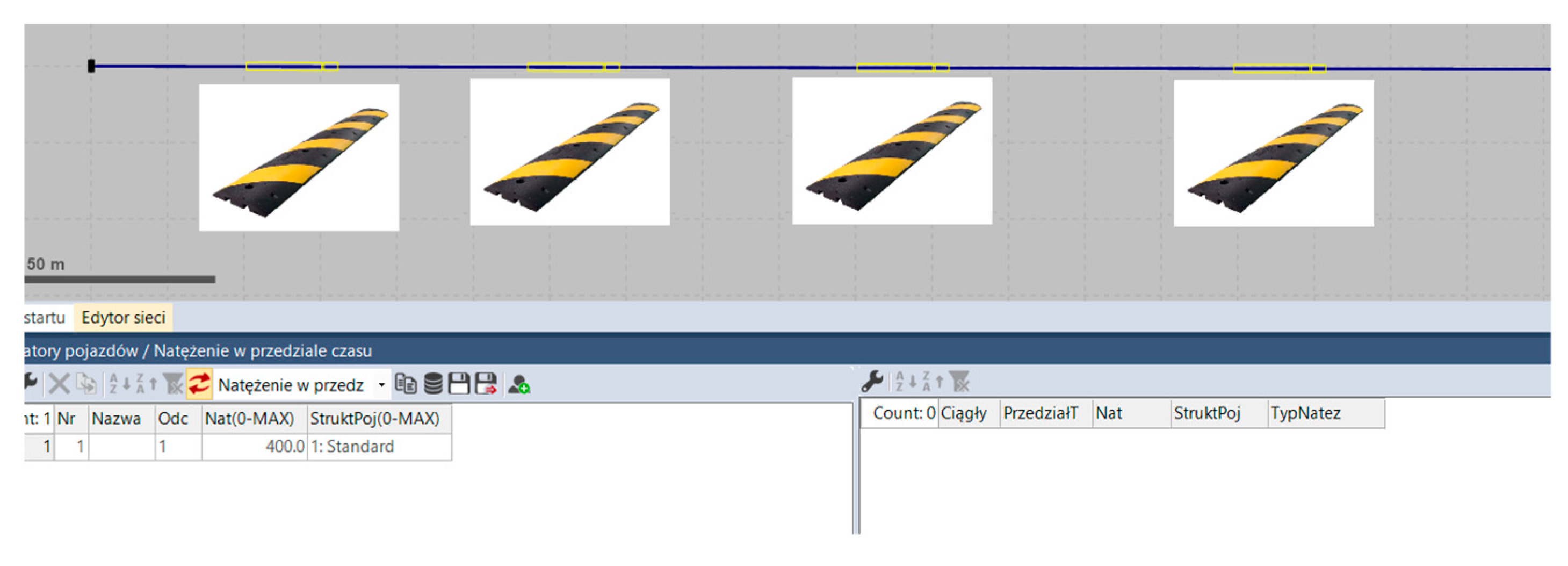
Figure 7.
CO2 emission map for speed bump simulation.
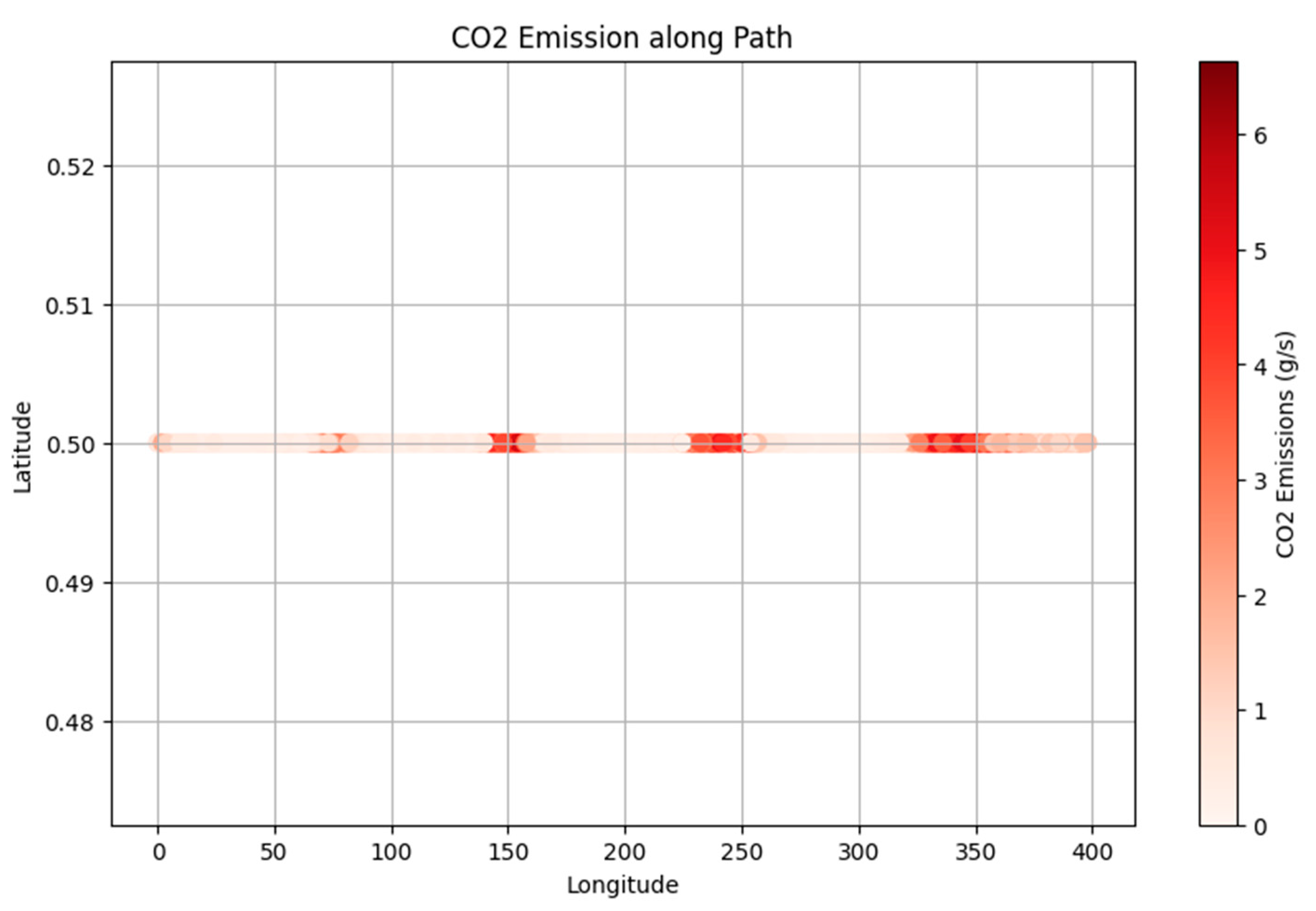
Figure 8.
Modelled raised intersection for the simulation scenario.
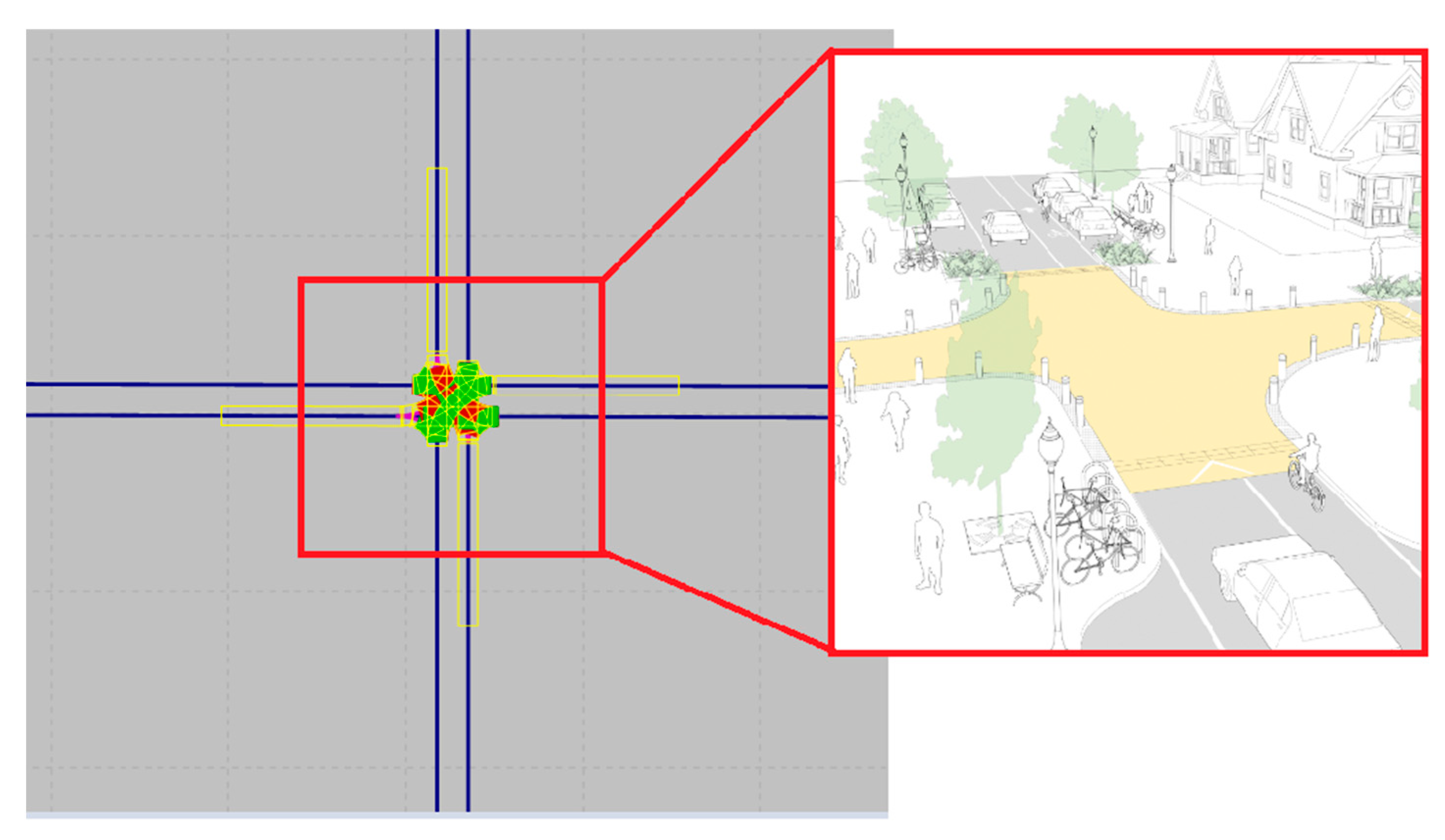
Figure 9.
CO2 emission map for raised intersection.
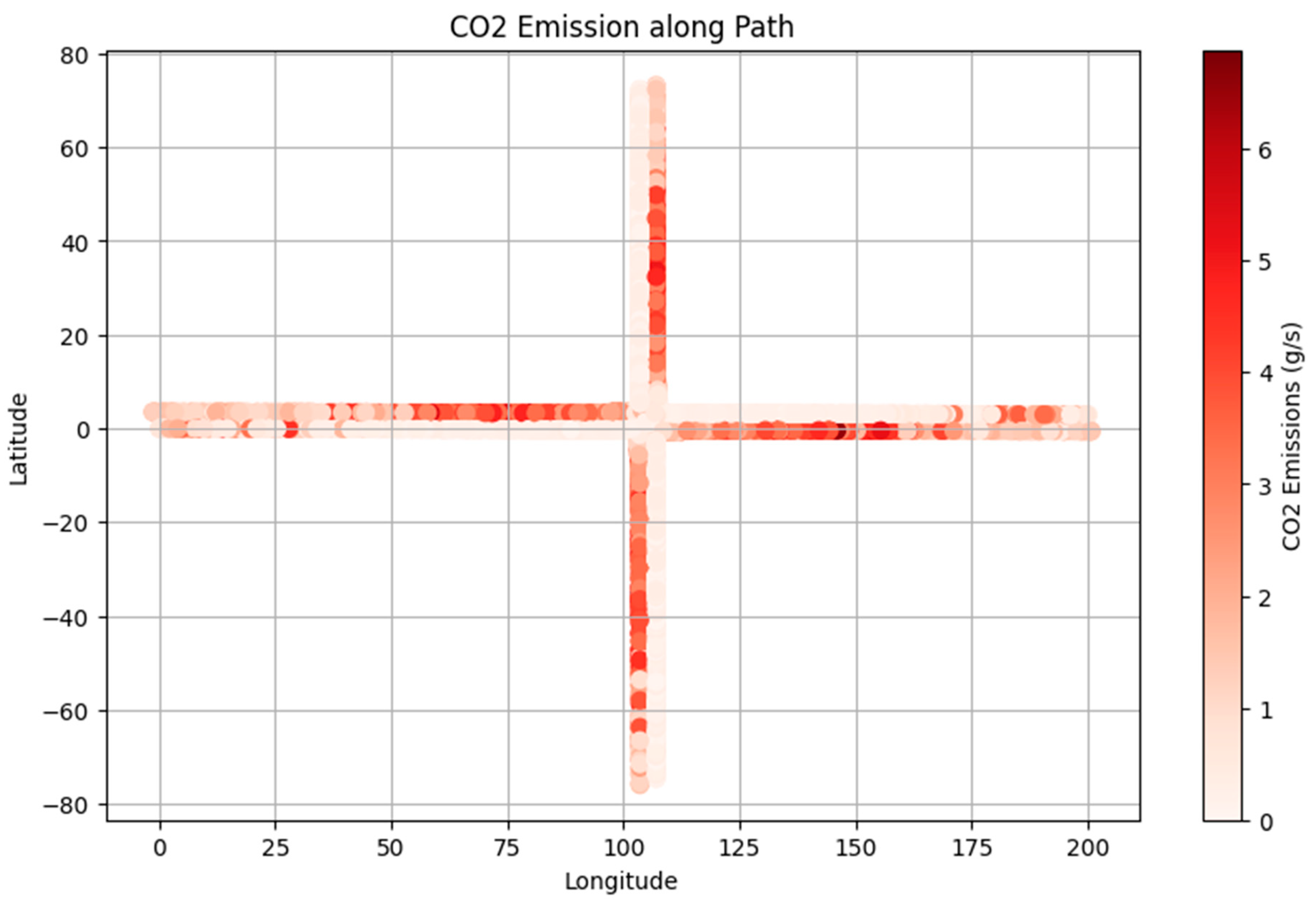
Figure 10.
Modelled roads for speed limits for the simulation scenario.
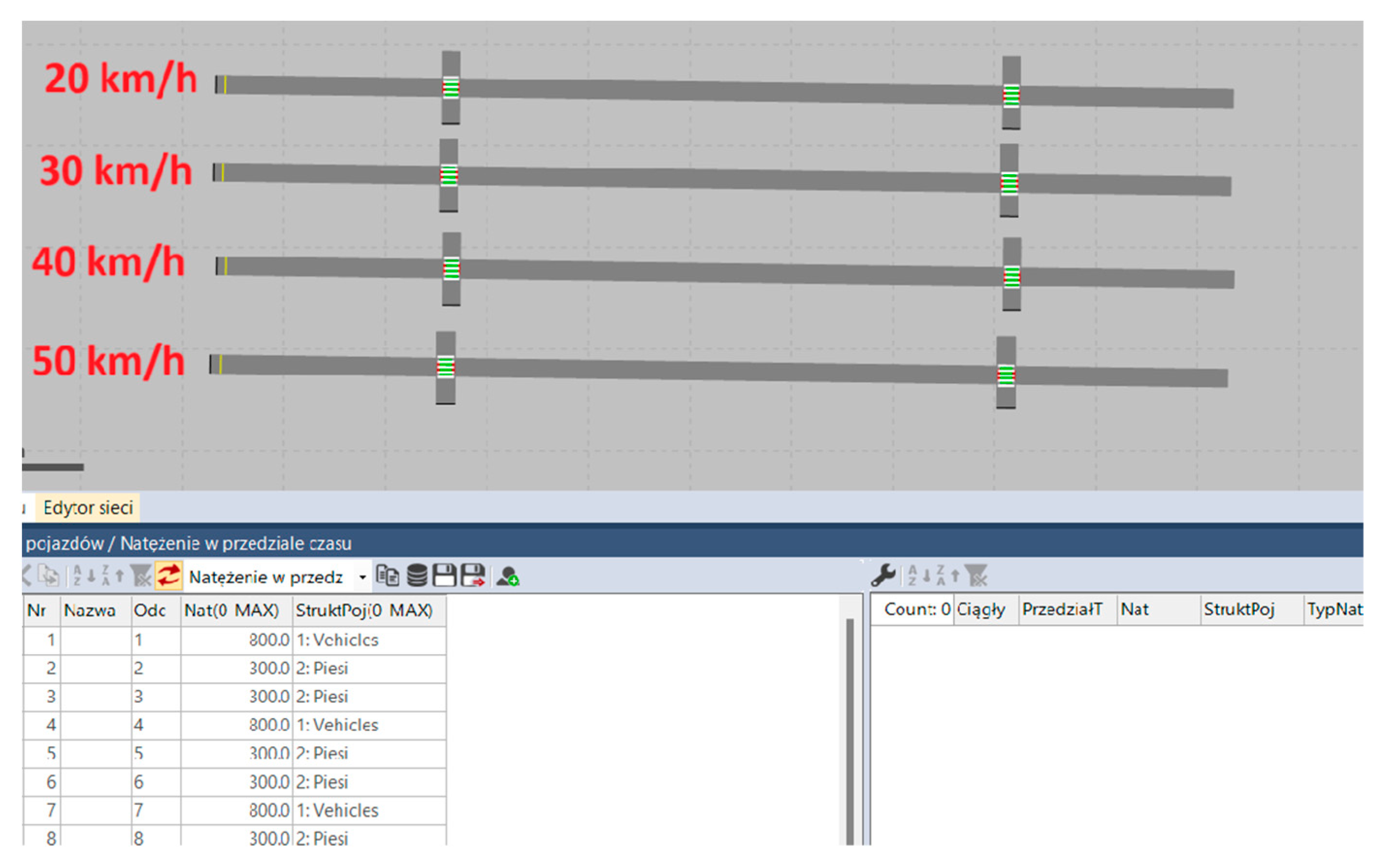
Figure 11.
CO2 emission maps for road models with speed restrictions.
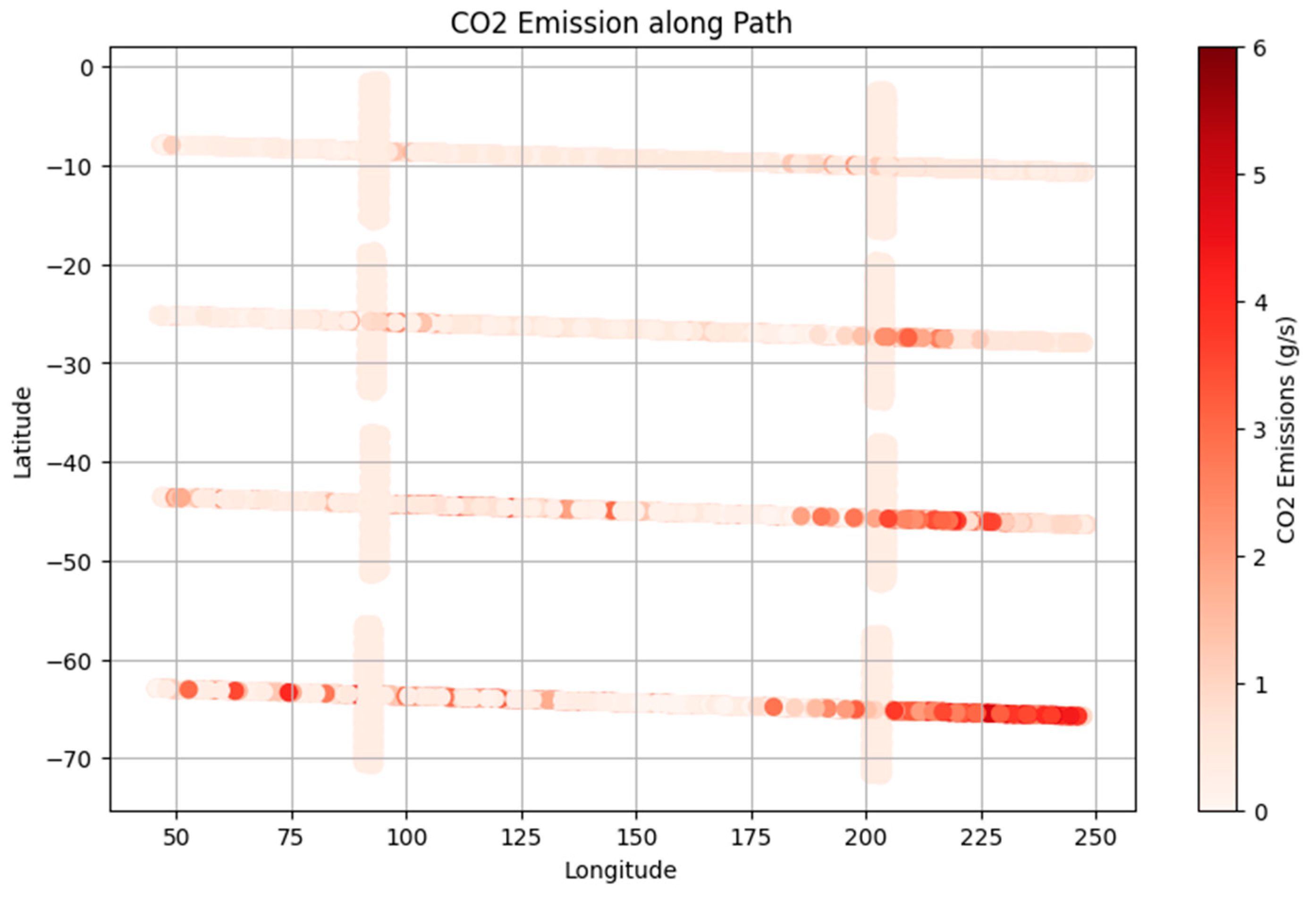

Table 1.
Selected technical parameters of research vehicle.
| Year of manufacture | 2020 |
| Engine type | Hybrid |
| Engine capacity | 1497 cm3 |
| Internal combustion engine: power | 75 KM |
| Internal combustion engine: maximum torque | 111 Nm 3600 – 4400 obr /min |
| Ignition | Spark |
| Electric motor type | Permanent magnet electric motor |
| Electric motor: power | 61 KM |
| Electric motor: maximum torque | 169 Nm |
| Exhaust after-treatment system | Three-way catalytic converter (TWC) |
| Exhaust emissions standard | Euro 6d |
| Traction battery | Nickel-hydride |
| Fuel tank capacity | 36 l |
| Unladen weight | min. 1085 / max. 1095 kg |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



