Submitted:
18 September 2023
Posted:
19 September 2023
You are already at the latest version
Abstract
This paper presents a new method for the design of separable denominators 2-D IIR filters with nearly linear phase in the passband.
The design method is based on a balanced-realization model reduction technique.
The nearly linear-phase 2-D IIR filter is designed using 2-D model reduction from a linear-phase 2-D FIR filter, which serves as the initial filter.
The structured controllability and observability Gramians $P^s$ and $Q^s$ serve as the foundation for this technique.
These Gramians are block diagonal positive-definite matrices that satisfy 2-D Lyapunov equations.
An efficient method is used to compute these Gramians by minimizing the traces of $P^s$ and $Q^s$ under linear matrix inequalities (LMI) constraints.
The use of these Gramians ensures that the resulting 2-D IIR filter preserves stability and can be implemented using a separable denominator 2-D filter with fewer coefficients than the original 2-D FIR filter.
Numerical examples show that the proposed method compares favorably with existing techniques.
Keywords:
2-D IIR digital filters
; Structured Gramians
; Lyapunov inequalities
; Linear matrix inequalities(LMI)
; Balanced truncation
1. Introduction
Two-dimensional (2-D) infinite impulse response (IIR) digital filters have been used in many signal processing applications such as image processing, video signal filtering, satellite image processing, beam filters, X-ray, TV transmission, and biomedical imaging [1,2,3,4,5]. Many methods have been proposed for the design of 2-D IIR digital filters, see, e.g., [6,7,8,9,10,11,12,13,14,15,16,17,18,19,20,21,22]. 2-D finite impulse response (FIR) digital filters have several advantages. They are simple and involve only localized computations [9]. They are always stable and can have a constant group delay. In comparison to 2-D IIR filters, the fundamental downside is that a large 2-D FIR filter order is frequently needed to meet performance requirements with high selectivity [9]. On the other hand, one of the key challenges in dealing with the construction of nearly linear-phase 2-D IIR filters is stability issues [10]. Some methods confined the filters to have denominators in the form of cascaded low-order factors [10], for which sufficient and necessary stability conditions are available [12,13,23]. Other methods used a state space approach to investigate the stability of 2-D discrete systems using the sufficiency of the 2-D Lyapunov equation to ensure 2-D stability. Although studying the stability problems in state space might lead to a strong stability constraints, it has been shown in [24] that the existence of a positive definite solution pair to the 2-D Lyapunov equation is a sufficient but not necessary condition for 2-D stability.
For 2-D IIR filters with separable denominator , the stability is much easier to guarantee than the stability of nonseparable denominator filters [9,25]. 2-D IIR filters with separable denominator have received more attention because, in addition to fewer stability constraints, the complexity of the implementation is reduced due to fewer coefficients with a separable denominator than with a nonseparable denominator of the same order [9,26,27]. The process of designing separable filters often results in filters that have high order. For various reasons it is desirable to represent a high-order filter by a lower-order one to reduce the implementation cost and improve the computational efficiency. As a solution to this problem, balanced realization model reduction techniques for 2-D digital filters have been investigated by many researchers during the past several years, and the results obtained have been found to be useful in digital filter design [8,28]. Since a balanced realization is essentially determined by the controllability and observability Gramians of the system, there are several types of Gramians which can be properly defined for a given 2-D system. Accordingly, there are different types of balanced realizations for a given 2-D discrete system, leading to different balanced approximations [29].
This paper is concerned with a balanced realization model reduction of 2-D digital filters based on the structured controllability Gramian and the structured observability Gramian , where and . In other words, to use a balanced truncation, the controllability Gramian P and the observability Gramian Q are needed. Linear matrix inequality (LMI) in the MATLAB environment can be employed to compute these Gramians. The theory of LMI has captured the interest of various research communities, particularly those working in the field of control systems [10,15,30,31,32,33]. The concept of LMI and its applications are based on the fact that LMIs can be reduced to linear programming problems that can be easily solved by computers [32,33]. Some of the earlier design work using LMI includes the work of Li and Paganini [34], and Vandendorpe [35]. In [35], frequency-weighted balanced and closed-loop balanced truncation are used to solve the same problem. In addition, block-diagonal solutions of LMI are used in model reduction of uncertain systems, where the state partitions correspond to different frequency variables [36]. A crucial step in obtaining a coordinate system wherein the realization is balanced is to compute the leading diagonal block matrices of the Gramians of the given 2-D system [37]. There have been many 2-D IIR filter design techniques that satisfy magnitude specifications using various methods [10,11,12,13,16,17,21,22]. The balanced realization model reduction method proposed in this paper is based on structured controllability and structured observability Gramians for 2-D IIR filters. The approach proposed in this paper differs in the sense that it ensures almost linear phase in the passband. Methods satisfying such specifications have been few [6,8,14,15,18,19,20,28,38,39].
The paper is organized as follows: In Section 2, the definition of structured controllability and observability Gramians of 2-D discrete systems is presented. Section 3 presents an LMI-based algorithm for computing the structured controllability and structured observability Gramians. In Section 4, a design procedure for a balanced realization model reduction technique for separable denominator 2-D IIR digital filters is proposed. To demonstrate the effectiveness of the suggested approach, several examples, including plane wave filtering using a 2-D fan filter, are provided in Section 5. Section 6 concludes the paper.
2. Gramians of 2-D Discrete Systems
Several types of Gramians can be properly defined for a given 2-D system and there are different types of balanced realizations for a 2-D discrete system, leading to different balanced approximations [29,40]. In this section, we are interested in the structured controllability and observability Gramians for 2-D discrete systems. The benefits of using this type of Gramians over the others is that the resulting positive definite block diagonal Gramians satisfy the 2-D Lyapunov equation and are, therefore, sufficient for 2-D stability [40]. Further, they can be used to obtain a block diagonal similarity transformation which will lead, as it will be discussed in Section 4, to a guaranteed stable 2-D reduced order system. We use a LMI-based algorithm to compute these Gramians where the problem is formulated as a minimization problem which can be solved numerically by minimizing the trace of the Gramians and under LMI constraints. Using this algorithm, the Gramians, , , are constrained to be positive definite , , symmetric , , and block diagonal , .
Consider a 2-D discrete state-space system realization described by the Roesser’s model [41]:
where is the horizontal state vector, is the vertical state vector, is the input, is the output, and and d are real matrices with appropriate dimensions.
The structured controllability and observability Gramians [29] are defined by the positive-definite solutions and of the following Lyapunov inequalities:
The matrices and are block diagonal matrices, and , representing the solutions to the above Lyapunov inequalities. In the following section, a method to obtain the structural controllability and observability Gramians using LMI will be presented.
3. Proposed Computation Method for Structured Gramians
LMIs have emerged as a powerful computational design tool in systems and control engineering due to their computational efficiency and flexibility for treating a large class of system design problems [31,42,43,44,45].
In general, an LMI has the form:
where is a vector of m real numbers called the decision variables, i.e., , for and are given symmetric matrices. The problem is to determine if there is a vector x that exists and satisfies the matrix inequality.
In [46,47], it has been shown that for certain special cases, the rank minimization problem can be reduced to a semi-definite problem. Under these hypotheses, it is possible to say that the solution can be obtained by solving the associated LMI. One effective heuristic, applicable when the matrix variable is symmetric and positive semi-definite, is to minimize the trace instead of the rank [31,42]. This results in a semi-definite problem (SDP), which can be efficiently solved. This heuristic obviously does not apply to problems in which the matrix is non-square, since the trace is not even defined [31,42,48]. In the following, we use a LMI-based algorithm to compute the Gramian matrices and of a 2-D discrete system represented by Roesser’s model.
Given a 2-D system in state space form represented by Roesser’s model, , then the block-diagonal positive-definite solutions and given by:
are the structured controllability and structured observability Gramians. The existence of such and ensures the stability of the system , but the converse does not hold, as it was shown in [6,24]. Finding and satisfying (8) and (9) can be solved by formulating an optimization problem using the traces of and .
Given a 2-D system realization , one can find by minimizing
subject to
and
subject to
This problem can be solved as a linear objective minimization problem under LMI constraints. The controllability and observability Gramian matrices and obtained by using this method are block-diagonal positive-definite matrices.
We refer the reader to Appendix A, where several numerical examples, including separable and non-separable denominator 2-D systems, are presented to illustrate the LMI technique used to solve two-dimensional Lyapunov inequalities.
4. Balanced Realization/Truncation Technique for 2-D IIR Digital Filters
Balanced realizations are known to be useful realizations for model reduction. The internally-balanced realization gives an indication of the dominance of the system states in the input/output behavior [49]. The idea of a balanced realization model reduction, in general, is to remove from the system matrices the blocks corresponding to the smaller Hankel singular values [19,20,50,51].
In the following section, we present the design procedures for nearly linear-phase 2-D IIR digital filters with separable denominators.
4.1. Design Procedures
For a 2-D IIR filter with a separable denominator, it is assumed that either or . The design steps proposed for this type of 2-D filter are described as follows:
- Design a linear-phase 2-D FIR digital filter that approximates the required frequency response
- Compute the structured controllability Gramian and the structured observability Gramian using the LMI-based algorithm proposed in Section 3. Note that since either or is zero, the equations are simplified and the computational cost of these Gramians is reduced. The obtained structured controllability and structured observability Gramians are block diagonal matrices, i.e., and
-
Find the invertible matrices and such that
- Compute the matrices
-
Decompose the matrices aswhere the full singular value decomposition of an m-by-n matrix M involves:
- m-by-m matrix u
- m-by-n matrix s
- n-by-n matrix v
- Compute the matrices
-
Obtain the similarity transformation matrix
- Form the balanced realization model
- Obtain the reduced order filter by partitioning the balanced realization obtained in the above step
The following section provides some design examples and a discussion of the implementation and evaluation details of this algorithm.
5. Illustrative Examples and Numerical Evaluation
In this section, we present several design examples to illustrate the effectiveness of the proposed method. In these examples, 2-D FIR lowpass, bandstop, and fan digital filters are first designed using window methods, and then the reduced-order 2-D IIR filters are obtained by using the proposed method. The implementation of the resulting filter designs is investigated and evaluated with respect to the maximum ripple in the passband region , the maximum ripple in the stopband region and the number of arithmetic operations.
5.1. 2-D Lowpass Filters
For the sake of comparison, we carried out a study of two examples of separable denominators 2-D IIR lowpass filters with nealy linear-phase in the passband. The first example was presented by Xiao and Agathoklis in [6], where it is required to design a 2-D lowpass filter to satisfy the following specifications:
where the passband edge and the stopband edge . First, the linear-phase 2-D FIR filter prototype of order (24,24) was designed using the window method. After that the proposed algorithm is guaranteed to obtain a stable 2-D IIR filter with nearly linear-phase in the passband. The solution was computable in a reasonable amount of time on a PC with an Intel(R) Core(TM) i5-2450M CPU @ 2.50 GHz and RAM of 6.00 GB. The computation time for the controllability Gramian and the observability Gramian was 7.46 seconds. The magnitude response of the full-order, (24,24), 2-D FIR lowpass filter is shown in Figure 1a. Figure 1b shows the magnitude response of the reduced order (13,13) 2-D IIR filter presented in [6]. Figure 1c shows the magnitude response of the reduced order (13,13) 2-D IIR filter using the proposed method. The magnitude contour of the obtained filter is shown in Figure 1d. Figure 1e and Figure 1f show the passband group delays, samples, of the reduced order 2-D IIR filter. Table 1 summarizes the results of the filter designed by the proposed method and the filter presented in [6] and the results of the filter reported in Table 1 of [52]. These results are presented in terms of the reduced order, obtained group delays and , the maximum ripple in the passband region and the maximum ripple in the stopband region . The proposed method gives a filter with comparable performance to that of the same order filter obtained in [6] and [52], with improvements in the maximum passband ripple and the stopband as shown in Table 1 below.
We also analyze the complexity of the implementation based on the number of non-zero coefficients in the transfer function of the filter. When implementing a general 2-D FIR filter, the number of filter coefficients C is , so the cost of implementation increases rapidly as or increases. In this example, for the 2-D FIR filter of order (24,24), C is 625, whereas for the reduced-order (13,13) 2-D IIR filter with a separable denominator, C is for the numerator plus for the denominator (i.e., ). We can see that implementing the 2-D IIR filter designed by the proposed method requires less than half of the number of coefficients required by the 2-D FIR filter.
The second example is the 2-D IIR lowpass filter that has the design specifications given in [53]. The proposed method is used to design the required 2-D IIR lowpass filter. The 2-D FIR lowpass filter of order (20,20) shown in Figure 2a is designed first using a window method to be used as an initial filter. Then a reduced 2-D IIR lowpass filter of order (12,12) is obtained based on the resulting 2-D FIR filter using the proposed method. The magnitude response of the reduced order 2-D IIR lowpass filter is shown in Figure 2b. The impulse response and the magnitude contour of the same filter are shown in Figure 2c and Figure 2d, respectively. It has been shown that the proposed method works very well when compared with other methods.
5.2. 2-D Bandpass Filter
In this example, we design a 2-D bandpass filter to satisfy the following specifications:
Where and . First, a linear-phase 2-D FIR filter of order (24,24) is designed using a window method to satisfy the design specifications. Then a 2-D IIR bandpass filter of a reduced order (13,13) is obtained by using the proposed method. In this example, the computation time for controllability Gramian and observability Gramian was 6.88 sec. The number of coefficients for the FIR filter of order is , while the obtained IIR filter of a reduced order of has a reduced number of coefficients equal to 224. The magnitude response of the full order (24,24) 2-D FIR bandpass filter is shown in Figure 3a. The obtained filter is stable, and the magnitude response of the reduced-order (13,13) 2-D IIR filter is shown in Figure 3b. The group delays and over the passband are illustrated in Figure 3c and Figure 3d.
5.3. Two-Dimensional Fan Filter
Fan filters constitute an important class of 2-D filters that find applications, for example, in geological and seismological data processing and beamforming [54,55]. This type of 2-D filter has the capability of directional filtering, where the signal is passed or rejected according to its direction. In this example, the proposed method is employed to the design of a 2-D fan filter having the magnitude response described in [56], with and as the two frequency variables where .
First, a 2-D linear-phase FIR fan filter of order (49,49) is designed. Figure 4a shows the magnitude response of the initial 2-D FIR fan filter. Second, a reduced-order nearly linear-phase 2-D IIR fan filter of order (34,34) is obtained using the method proposed in Section 4. The magnitude response of the reduced-order 2-D IIR fan filter is illustrated in Figure 4b. The group delays and of the reduced order 2D IIR fan filter are shown in Figure 4c and Figure 4d, respectively. Figure 4e shows the impulse response of the reduced-order 2-D IIR fan filter. The magnitude contour of the same reduced-order 2-D IIR fan filter is illustrated in Figure 4f. The number of multiplications and additions for the 2-D FIR initial filter of order is and 2499, respectively. For implementation purposes, the obtained 2-D IIR fan filter with a reduced-order of has fewer computations: 1295 multiplications and 1294 additions. The computation time for controllability Gramian and observability Gramian is 6.53 sec. As can be seen, the designed 2-D IIR fan filter has a lower order compared with the 2-D FIR filter, which would lead to reduced the computational complexity in the implementation to achieve the same performance.
5.4. Fan Filtering of Plane Waves Image
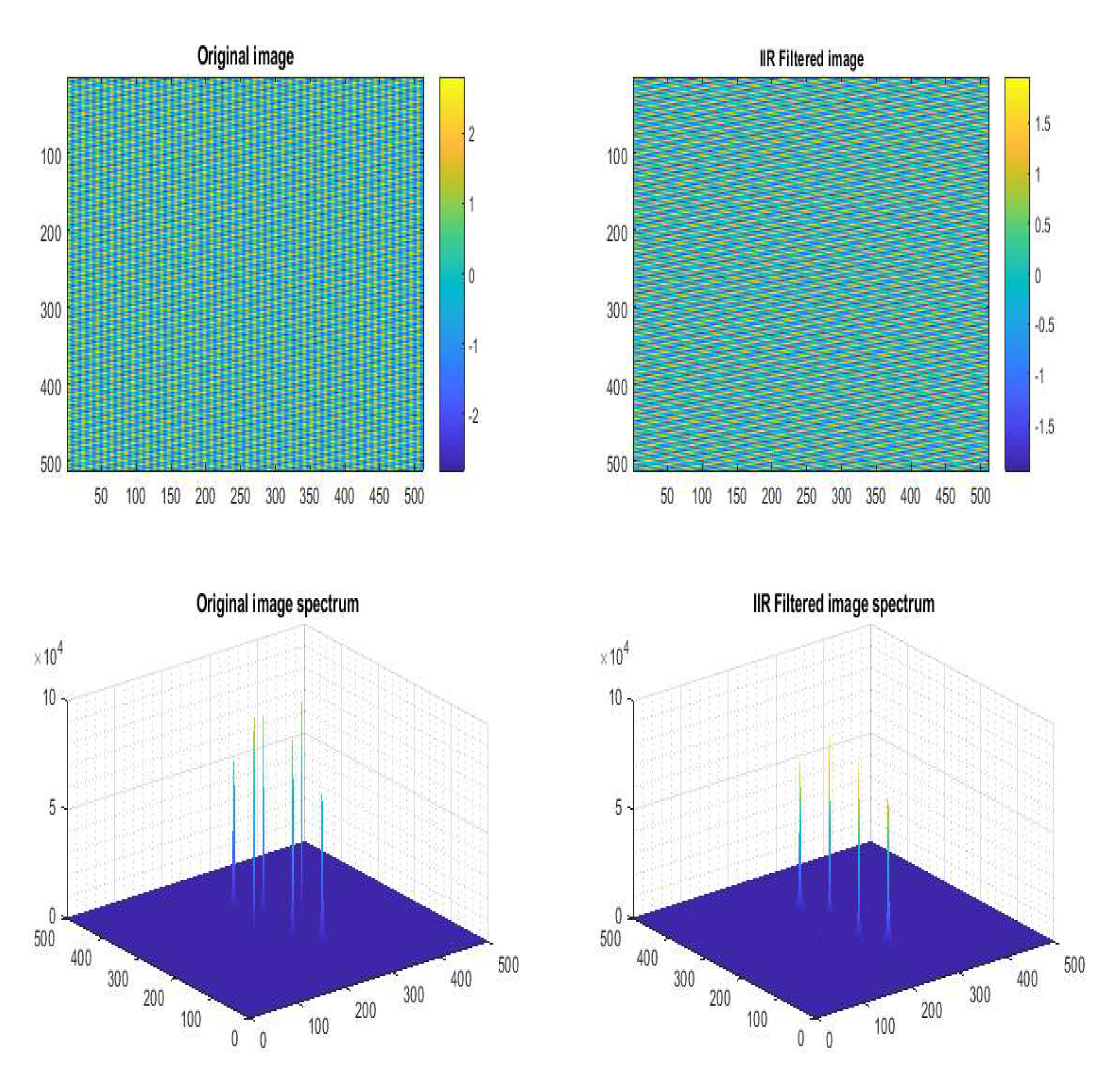
In this section, we present a 2-D fan filter for attenuation of the ground roll. Ground roll is a particular type of Rayleigh wave and has a high amplitude, low frequency, and low velocity. It is the main type of coherent noise in land seismic surveys [57]. We generate an image via the sum of plane waves (PWs) with two angles and measured counterclockwise from the horizontal. The wave has rad/pixels and rad/pixels over the size pixels of the output image. 2-D FIR and IIR fan filters are designed to be applied to this PW image, where it is required to design a reduced order 2-D IIR fan filter to satisfy the following design specifications:
Figure 5a shows the magnitude response of the initial 2-D FIR fan filter of order (24,24) designed using the window method. The reduced 2-D IIR fan filter of order (17,17) obtained by using the proposed method is shown in Figure 5b.
For comparison purposes, the 2-D FIR fan filter of order (24,24) shown in Figure 5a is applied to this PW image first, where Figure 6 shows the original and filtered images and their 2-D spectra. The reduced order 2-D IIR fan filter of order (17,17) shown in Figure 5b is then applied to the same image, and the result is shown in Figure 7. In terms of the computation complexity, the 2-D FIR fan filter of order (24,24) has number of coefficients C equal to 625, whereas for the reduced-order (17,17) 2-D IIR fan filter, we have for the numerator plus for the denominator (i.e., the number of coefficients is ), which is reduced to less than 58%. For implementation, we can see that the obtained 2-D IIR fan filter requires less than half the number of coefficients required by the 2-D FIR fan filter. The results show that the reduced order 2-D IIR fan filter designed using the proposed method has good filtering performance on the PW image as well as the advantage of a low implementation cost in terms of adders and multipliers over the 2-D FIR fan filter.
6. Conclusion
A method to design nearly linear-phase 2-D filters has been presented. The method is based on the model reduction of 2-D filters using balanced realization. The design method starts with the design of a 2-D linear-phase FIR filter and its state-space representation as a 2-D system with a separable denominator. The balanced realization of this system can be obtained using the 2-D structural controllability and structural observability Gramians of the system. These block-diagonal Gramians satisfy a set of Lyapunov inequalities, which are solved using an optimization approach under linear matrix inequalities constraints. The use of the structural Gramians ensures that the resulting reduced-order system satisfies a 2-D Lyapunov equation and is, therefore, 2-D stable. The proposed method is illustrated by numerical examples that have shown that the method is suitable for the design of reduced order 2-D IIR filters with nearly linear-phase in the passband. The performance of the obtained 2-D IIR filters compares favorably with existing techniques, while at the same time they can be implemented using a separable-denominator filter with less computational complexity than the original 2-D FIR filter. Although the phase of the reduced order 2-D IIR filter is only nearly linear, we can see that the reduced order 2-D IIR filter offers good selectivity, computation efficiency, and reduced system delay when compared to the corresponding 2-D FIR filter.
Author Contributions
Conceptualization, A.O., and P.A.; methodology, A.O., and P.A.; software, A.O., P.A. and D.S.; validation, A.O., P.A. and D.S.; formal analysis, A.O., P.A. and D.S.; investigation, A.O., P.A. and D.S.; resources, A.O., P.A.; data curation, A.O., and P.A.; writing—original draft preparation, A.O.; writing—review and editing, A.O., P.A. and D.S.; visualization, A.O., P.A. and D.S.; supervision, P.A. and D.S.; project administration, A.O., P.A. and D.S., All authors have read and agreed to the published version of the manuscript.
Funding
Not Applicable
Data Availability Statement
Not Applicable
Conflicts of Interest
The authors declare no conflict of interest.
Abbreviations
The following abbreviations are used in this manuscript:
| 1-D | One Dimensional |
| 2-D | Two Dimensional |
| FIR | Finite Impulse Response |
| IIR | Infinite Impulse Response |
| LMI | Linear Matrix Inequality |
| MOR | Model Order Reduction |
| PB | Passband |
| SB | Stopband |
| SDP | Semi-definite Problem |
| tr | Trace |
| diag | Diagonal |
| Min | Minimum |
| Max | Maximum |
| PW | Plane Wave |
| U | Unit Circle |
Appendix A
Appendix A.1
In this Appendix, two examples of obtaining the structured controllability and structured observability Gramians are presented. They include 2-D system matrices in the non-separable and separable characteristic polynomial.
Example 1: Consider a 2-D discrete system described by Roesser’s model, , as follows
where and .
Applying the proposed LMI algorithm to solve the Lyapunov inequalities, the structured controllability and the structured observability Gramians are found to be positive definite block diagonal matrices as given below:
Example 2: In this example, we consider the following 2-D model , also presented as illustrative example in Section 3.4 in [58]. The corresponding system matrices are given below:
,
Here, and . Note that, since is a zero matrix, this is a separable-denominator system where the denominator of the corresponding transfer function can be factored as the product of a polynomial in by a polynomial in . The structured controllability matrix and the structured observability matrix are found to be symmetric positive-definite and block-diagonal matrices where and and these sub-matrices and for are given as below:
For the same system presented in the above example, we consider now a non-separable denominator case where the matrix A12 is given by:
The results obtained for the block diagonal structured controllability and observability Gramians Ps = diag(p1, p2) and Qs = diag(q1, q2) are found to be as follows:
References
- Lim, J.S. Two-dimensional signal and image processing; Englewood Cliffs: NJ, Prentice Hall, 1990; 710 p. [Google Scholar]
- Dudgeon, D.E.; Mersereau, R.M. Multidimensional digital signal processing; Prentice-Hall Signal Processing Series, Englewood Cliffs: Prentice-Hall, 1984. [Google Scholar]
- Lu, W.S. Two-dimensional digital filters; CRC Press, 1992; Vol. 80. [Google Scholar]
- Wijesekara, R.T.; Edussooriya, C.U.; Bruton, L.T.; Agathoklis, P. A low-complexity 2-D spatially-interpolated FIR trapezoidal filter for enhancing broadband plane waves. In 2017 10th International Workshop on Multidimensional (nD) Systems (nDS); IEEE, 2017; pp. 1–6. [Google Scholar]
- Hua, J.; Kuang, W.; Gao, Z.; Meng, L.; Xu, Z. Image denoising using 2-D FIR filters designed with DEPSO. Multimedia tools and applications 2014, 69, 157–169. [Google Scholar] [CrossRef]
- Xiao, C.; Agathoklis, P. Design and implementation of approximately linear phase two-dimensional IIR filters. IEEE Transactions on Circuits and Systems II: Analog and Digital Signal Processing 1998, 45, 1279–1288. [Google Scholar]
- Zhou, K.; Aravena, J.; Gu, G.; Xiong, D. 2-D model reduction by quasi-balanced truncation and singular perturbation. IEEE Transactions on Circuits and Systems II: Analog and Digital Signal Processing 1994, 41, 593–602. [Google Scholar] [CrossRef]
- Gu, G.; Shenoi, B. A novel approach to the synthesis of recursive digital filters with linear phase. IEEE transactions on circuits and systems 1991, 38, 602–612. [Google Scholar] [CrossRef]
- Gorinevsky, D.; Boyd, S. Optimization-based design and implementation of multidimensional zero-phase IIR filters. IEEE Transactions on Circuits and Systems I: Regular Papers 2006, 53, 372–383. [Google Scholar] [CrossRef]
- Lai, X.; Meng, H.; Cao, J.; Lin, Z. A sequential partial optimization algorithm for minimax design of separable-denominator 2-D IIR filters. IEEE Transactions on Signal Processing 2017, 65, 876–887. [Google Scholar] [CrossRef]
- Mastorakis, N.E.; Gonos, I.F.; Swamy, M. Design of two-dimensional recursive filters using genetic algorithms. IEEE Transactions on Circuits and Systems I: Fundamental Theory and Applications 2003, 50, 634–639. [Google Scholar] [CrossRef]
- Ramamoorthy, P.; Bruton, L. Design of stable two-dimensional analogue and digital filters with applications in image processing. International Journal of Circuit Theory and Applications 1979, 7, 229–245. [Google Scholar] [CrossRef]
- Hinamoto, T.; Maekawa, S. Design of two-dimensional recursive digital filters using mirror-image polynomials. IEEE transactions on circuits and systems 1986, 33, 750–758. [Google Scholar] [CrossRef]
- Aly, S.; Fahmy, M. Design of two-dimensional recursive digital filters with specified magnitude and group delay characteristics. IEEE Transactions on Circuits and Systems 1978, 25, 908–916. [Google Scholar] [CrossRef]
- Chottera, A.; Jullien, G. A linear programming approach to recursive digital filter design with linear phase. IEEE Transactions on Circuits and Systems 1982, 29, 139–149. [Google Scholar] [CrossRef]
- Dumitrescu, B. Optimization of two-dimensional IIR filters with nonseparable and separable denominator. IEEE Transactions on Signal Processing 2005, 53, 1768–1777. [Google Scholar] [CrossRef]
- Miyata, T.; Aikawa, N.; Sugita, Y.; Yoshikawa, T. A design method for separable-denominator 2D IIR filters using a stability criterion based on the system matrix. 15th IEEE International Conference on Electronics, Circuits and System, 2008; pp. 826–829. [Google Scholar]
- Wysocka-Schillak, F. Design of separable 2-D IIR Filters with approximately linear phase in the passband using genetic algorithm. 2008 Conference on Human System Interactions, 2008; IEEE; pp. 66–70. [Google Scholar]
- Holford, S.; Agathoklis, P. The use of model reduction techniques for designing IIR filters with linear phase in the passband. IEEE Transactions on Signal Processing 1996, 44, 2396–2404. [Google Scholar] [CrossRef]
- Lawson, S.; Anderson, M. The design of 2-D approximately linear phase filters using a direct approach. Signal processing 1997, 57, 205–221. [Google Scholar] [CrossRef]
- Mitiche, L.; Adamou-Mitiche, A. B. H. New procedure in designing 2D-IIR filters based on 2D-FIR filters approximation. IEEE Transactions on Systems Signal Processing: Regular Papers 2013, 57, 515–520. [Google Scholar]
- Guo, T.Y.; Hwang, C.; Shieh, L.S.; Chen, C.H. Reduced-order models of 2-D linear discrete separable-denominator system using bilinear Routh approximations. IEE Proceedings G (Circuits, Devices and Systems) 1992, 139, 45–56. [Google Scholar] [CrossRef]
- Sun, J.; Fang, W.; Xu, W. A quantum-behaved particle swarm optimization with diversity-guided mutation for the design of two-dimensional IIR digital filters. IEEE Transactions on Circuits and Systems II: Express Briefs 2010, 57, 141–145. [Google Scholar] [CrossRef]
- Anderson, B.; Agathoklis, P.; Jury, E.; Mansour, M. Stability and the matrix Lyapunov equation for discrete 2-dimensional systems. IEEE Transactions on Circuits and Systems 1986, 33, 261–267. [Google Scholar] [CrossRef]
- Lashgari, B.; Silverman, L.; Abramatic, J.F. Approximation of 2-D separable in denominator filters. IEEE transactions on circuits and systems 1983, 30, 107–121. [Google Scholar] [CrossRef]
- Kumar, A.; Fairman, F.; Sveinsson, J. Separately balanced realization and model reduction of 2-D separable-denominator transfer functions from input-output data. IEEE transactions on circuits and systems 1987, 34, 233–239. [Google Scholar] [CrossRef]
- Beliczynski, B.; Kale, I.; Cain, G.D. Approximation of FIR by IIR digital filters: An algorithm based on balanced model reduction. IEEE Transactions on Signal Processing 1992, 40, 532–542. [Google Scholar] [CrossRef]
- Lu, W.S.; Wang, H.P.; Antoniou, A. Design of two-dimensional digital filters using singular-value decomposition and balanced approximation method. IEEE International Symposium on Circuits and Systems, 1989; IEEE; pp. 1656–1659. [Google Scholar]
- Lu, W.S.; Luo, H.; Antoniou, A. Recent results on model reduction methods for 2-D discrete systems. IEEE International Symposium on Circuits and Systems. Circuits and Systems Connecting the World, 1996; Vol. 2, pp. 348–351. [Google Scholar]
- Willems, J. Least squares stationary optimal control and the algebraic Riccati equation. IEEE Transactions on Automatic Control 1971, 16, 621–634. [Google Scholar] [CrossRef]
- Boyd, S.; El Ghaoui, L.; Feron, E.; Balakrishnan, V. Linear matrix inequalities in system and control theory; 1994; Vol. 15. [Google Scholar]
- Knorn, S.; Middleton, R.H. Stability of two-dimensional linear systems with singularities on the stability boundary using LMIs. IEEE Transactions on Automatic Control 2013, 58, 2579–2590. [Google Scholar] [CrossRef]
- Xue, D.; Chen, Y. Solving applied mathematical problems with MATLAB; Chapman and Hall/CRC, 2008. [Google Scholar]
- Li, L.; Paganini, F. Structured coprime factor model reduction based on LMIs. Automatica 2005, 41, 145–151. [Google Scholar]
- Vandendorpe, A.; Van Dooren, P. On model reduction of interconnected systems. Proceedings International Symposium Math. Th. Netw. Syst., Belgium, 2004.
- Beck, C.L.; Doyle, J.; Glover, K. Model reduction of multidimensional and uncertain systems. IEEE Transactions on Automatic Control 1996, 41, 1466–1477. [Google Scholar] [CrossRef]
- Premaratne, K.; Jury, E.; Mansour, M. An algorithm for model reduction of 2-D discrete time systems. IEEE Transactions on Circuits and Systems 1990, 37, 1116–1132. [Google Scholar] [CrossRef]
- Okuda, M.; Matsuda, K.; Ikehara, M.; Takahashi, S.i. Complex approximation of 2-D digital filters with prescribed log magnitude phase response. Proceedings of Digital Processing Applications (TENCON’96), 1996; IEEE; Vol. 1, pp. 388–393. [Google Scholar]
- Nikolic, S.; Stojanovic, V. Design of 2D IIR digital filters with approximately flat group delay characteristic. 5th International Conference on Telecommunications in Modern Satellite, Cable and Broadcasting Service. TELSIKS 2001. Proceedings of Papers (Cat. No. 01EX517), 2001; IEEE; Vol. 2, pp. 807–810. [Google Scholar]
- Anderson, B.; Agathoklis, P.; Jury, E.; Mansour, M. Stability and the matrix Lyapunov equation for discrete 2-dimensional systems. IEEE Transactions on Circuits and Systems 1986, 33, 261–267. [Google Scholar] [CrossRef]
- Roesser, R. A discrete state-space model for linear image processing. IEEE Transactions on Automatic Control 1975, 20, 1–10. [Google Scholar] [CrossRef]
- Fazel, M.; Hindi, H.; Boyd, S. P. A Rank Minimization Heuristic with Application to Minimum Order System Approximation. Proceedings of the American Control Conference 2001, 4734–4739. [Google Scholar]
- Helton, J.W.; McCullough, S.; Putinar, M.; Vinnikov, V. Convex matrix inequalities versus linear matrix inequalities. IEEE transactions on automatic control 2009, 54, 952–964. [Google Scholar] [CrossRef]
- Tran, T. Linear matrix inequalities for dissipative constraints in stabilization with relaxed non-monotonic Lyapunov function. 2017 International Conference on Control, Automation and Information Sciences (ICCAIS), 2017; pp. 61–66. [Google Scholar]
- Skelton, R.E.; Iwasaki, T.; Grigoriadis, D.E. A unified algebraic approach to control design; CRC Press, 1997. [Google Scholar]
- Mesbahi, M. On the rank minimization problem and its control applications. Systems & control letters 1998, 33, 31–36. [Google Scholar]
- Mesbahi, M.; Papavassilopoulos, G.P. On the rank minimization problem over a positive semidefinite linear matrix inequality. IEEE Transactions on Automatic Control 1997, 42, 239–243. [Google Scholar] [CrossRef]
- Hmamed, A.; Alfidi, M.; Benzaouia, A.; Tadeo, F. LMI conditions for robust stability of 2D linear discrete-time systems. Mathematical Problems in Engineering 2008, 2008. [Google Scholar] [CrossRef]
- Ghafoor, A.; Sreeram, V. A survey/review of frequency-weighted balanced model reduction techniques. Journal of Dynamic Systems, Measurement, and Control 2008, 130, 061004. [Google Scholar] [CrossRef]
- Moore, B. Principal component analysis in linear systems: Controllability, observability, and model reduction. IEEE transactions on automatic control 1981, 26, 17–32. [Google Scholar] [CrossRef]
- Kockanat, S.; Karaboga, N. The design approaches of two-dimensional digital filters based on metaheuristic optimization algorithms: a review of the literature. Artificial Intelligence Review 2015, 44, 265–287. [Google Scholar] [CrossRef]
- Gu, G.; Shenoi, B.A.; Zhang, C. Synthesis of 2-D linear phase digital filters. IEEE Transactions on Circuits and Systems 1990, 37, 1499–1508. [Google Scholar] [CrossRef]
- Mitiche, L.; Adamou-Mitiche, A.B.H. New procedure in designing 2D-IIR filters based on 2D-FIR filters approximation. 2013 8th International Workshop on Systems, Signal Processing and their Applications (WoSSPA), 2013; pp. 515–520. [Google Scholar]
- Bruton, L.; Bartley, N. A general-purpose computer program for the design of two-dimensional recursive filters—2DFil. Circuits, Systems and Signal Processing 1984, 3, 243–264. [Google Scholar] [CrossRef]
- Bruton, L.; Bartley, N. Using nonessential singularities of the second kind in two-dimensional filter design. IEEE transactions on circuits and systems 1989, 36, 113–116. [Google Scholar] [CrossRef]
- Matei, R. Design approach for a class of 2D recursive filters. 2017 International Symposium on Signals, Circuits and Systems (ISSCS), 2017; pp. 1–4. [Google Scholar]
- Porsani, M.J.; Silva, M.G.; Melo, P.E.; Ursin, B. Ground-roll attenuation based on SVD filtering. 2009 SEG Annual Meeting, 2009. [Google Scholar]
- Guo, T.Y.; Hwang, C.; Shieh, L.S.; Chen, C.H. Reduced-order models of 2-D linear discrete separable-denominator system using bilinear Routh approximations. IEE Proceedings G (Circuits, Devices and Systems) 1992, 139, 45–56. [Google Scholar] [CrossRef]
Figure 1.
Magnitude responses and group delays of 2-D lowpass FIR and IIR filters discussed in example 1 of Section 5.1
Figure 1.
Magnitude responses and group delays of 2-D lowpass FIR and IIR filters discussed in example 1 of Section 5.1
Figure 2.
Magnitude responses of 2-D lowpass FIR and IIR filters presented in example 2 of Section 5.1
Figure 2.
Magnitude responses of 2-D lowpass FIR and IIR filters presented in example 2 of Section 5.1
Figure 3.
Magnitude responses and group delays of the reduced 2-D IIR bandpass filter described in Section 5.2
Figure 3.
Magnitude responses and group delays of the reduced 2-D IIR bandpass filter described in Section 5.2
Figure 4.
2-D FIR and IIR fan filters described in Section 5.3
Figure 4.
2-D FIR and IIR fan filters described in Section 5.3
Figure 5.
Magnitude response of 2-D FIR and IIR fan filters described in Section 5.4
Figure 5.
Magnitude response of 2-D FIR and IIR fan filters described in Section 5.4
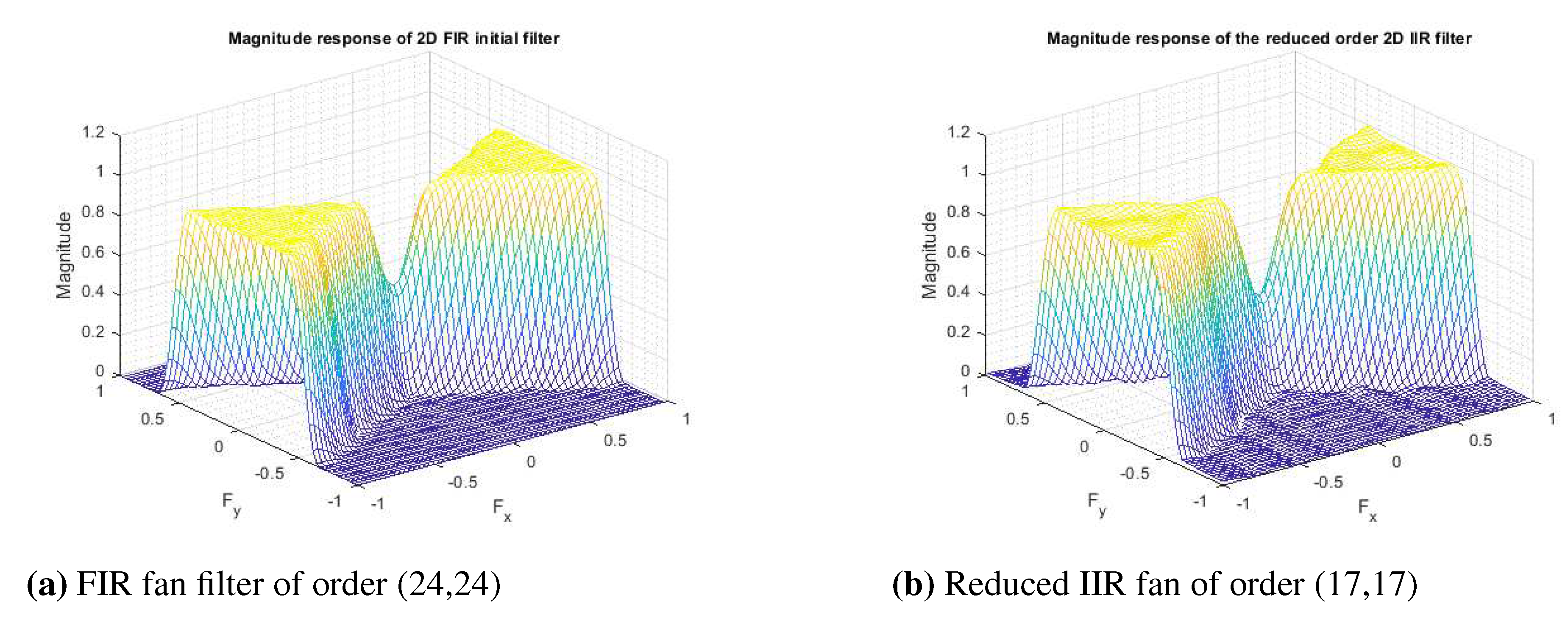
Figure 6.
Original and filtered plane wave images using 2-D FIR fan filter and their spectrum
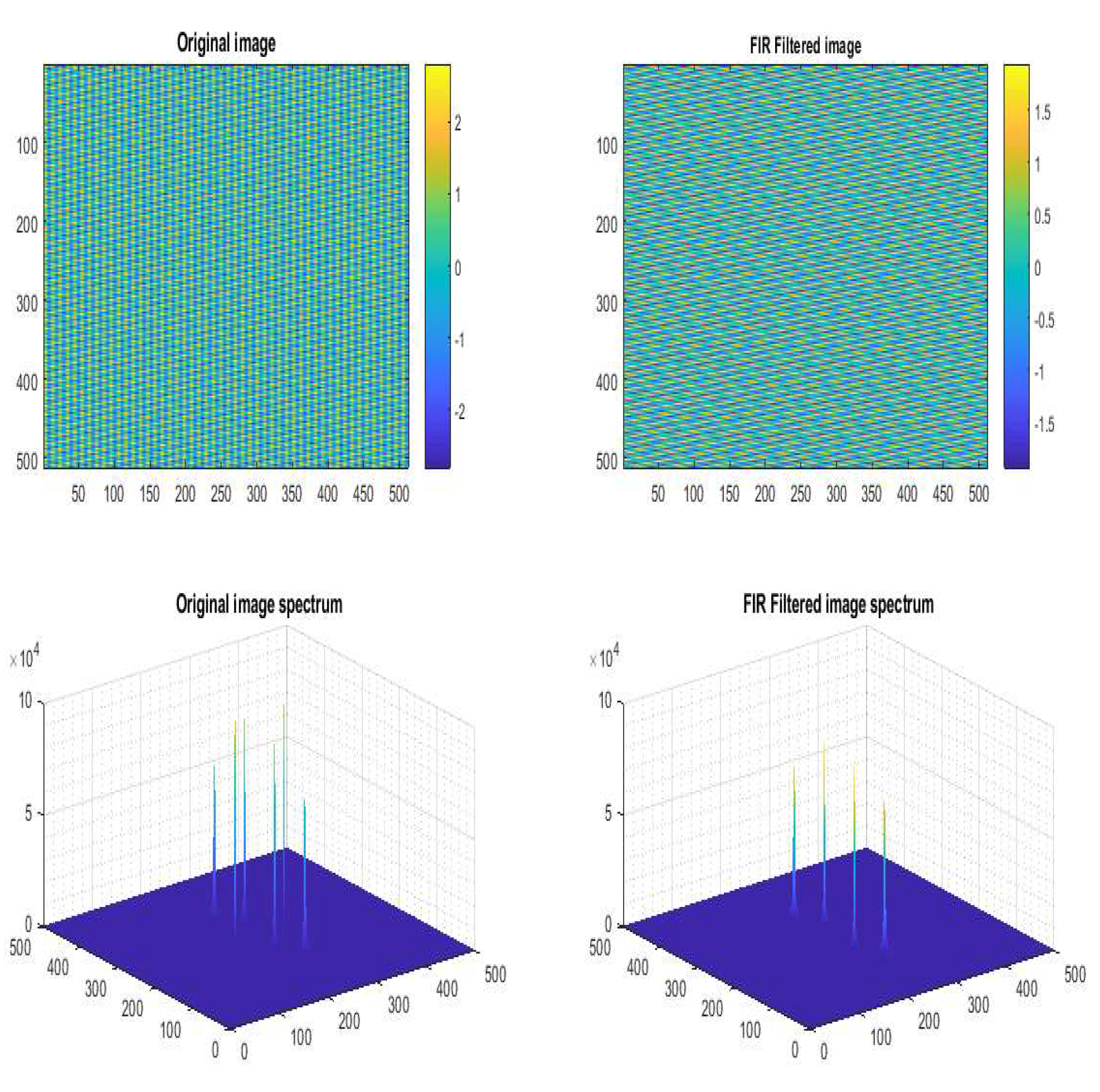
Figure 7.
Original and filtered plane wave images using reduced order 2-D IIR fan filter and their spectrum
Figure 7.
Original and filtered plane wave images using reduced order 2-D IIR fan filter and their spectrum

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



