
Preprint
Article
Early Fire Detection using LSTM based Instance Segmentation and IoTs for Disaster Management
Altmetrics
Downloads
110
Views
29
Comments
0


This version is not peer-reviewed
Submitted:
02 October 2023
Posted:
03 October 2023
You are already at the latest version
Alerts
Abstract
Fire outbreaks continue to cause damage despite the improvements in fire-detection tools and algorithms. It is still challenging to implement a well performing and optimized approach, which is sufficiently accurate, and has tractable complexity and low false alarming rate. Small amount of fire and identification of fire from a long distance is also a challenge in previously proposed techniques. In this study, we propose a novel hybrid model based on Convolutional Neural Networks (CNN) to detect and analyze fire intensity. 21 convolutional layers, 24 Rectified Linear Unit (ReLU) layers, 6 pooling layers, 3 fully connected layers, 2 dropout layers, and a softmax layer are included in the proposed 57-layer CNN model. Our proposed model performs instance segmentation in order to distinguish between fire and non-fire events. To reduce the intricacy of the proposed model, we also propose a key-frame extraction algorithm. The proposed model uses Internet of Things (IoT) devices to alert the relevant person by calculating the severity of fire. Our proposed model is tested on a publicly available dataset having fire and normal videos. The achievement of 95.25 % classification accuracy, 0.09% False Positive Rate (FPR), 0.65 percent False Negative Rate (FNR), and a prediction time of 0.08 seconds validates the proposed system.
Keywords:
Subject: Computer Science and Mathematics - Artificial Intelligence and Machine Learning
1. Introduction
Fire releases smoke, light, flames, heat and chemical gases as a result of combustion process [1]. Although fire has provided humans with prosperous living by providing the means for energy sources, heating and cooking, uncontrolled fire can endanger properties and human lives. National Fire Protection Association (NFPA) have reported 1.3 million fire cases in 2015, causing more than 3 thousand deaths and 15 thousand injuries [2]. Existing fire detection tools can be categorized into sensor-based, video-based and hybrid techniques utilizing video-based sensors [3]. Sensor-based techniques utilizes sensors to measure levels of carbon dioxide, carbon monoxide, temperature and smoke particles for efficiently detecting fire at early stages sensors [4]. The problem with these techniques is the cost and maintenance of these sensors. In contrast, video-based sensors utilize devices like cameras to capture the data and thermographic sensors to detect the fire pixel intensities [5]. The problem with these systems is their slow processing due to time taken during data collection, processing and triggering the alarm in severe conditions [6]. This issue can be solved by adopting an efficient technique, which not only solves the processing time by reducing the dimensionality of extracted data, but effectively processes the input data in lowest possible time. Thus, a need for reliable techniques to detect fire in early stages is essential to prevent the damage and loss of human lives.
Connecting billions of smart devices creates the Internet of Multimedia Things (IoMTs), while an increase in the number of installed sensors is leading to the emergence of the Tactile Internet (TI), which has various application in the areas of e-health [7], smart surveillance [8] and disaster management [9]. Smart surveillance includes disaster and security management, where edge intelligence has a significant role. For rapid actions in disastrous situation, it is crucial to report unusual circumstances instantly. Disaster management mainly depends on fire/smoke recognition, which can be achieved using edge computing. Fire can spread due to human errors or system failures, which is a big risk for human lives and properties. In 2015, overall damage of 3.1 billion USD is noticed only caused by wildfire catastrophe whereas, in Europe 10,000 km2 fertile area is affected from fire disasters yearly [10]. Color-based fire detection methods [11] have a major issue having high rate of incorrect alarms. To overcome this issue, a hybrid approach was introduced using color, shape and motion characteristics of fire [12].
Convolutional Neural Networks (CNNs) are widely used for fire identification problems [13]. CNNs have recently achieved efficient results on many other domains including agriculture [14], medical [15,16] and others [17,18,19,20,21,22,23,24,25]. A CNN based fire detection methods was proposed in [26] which was based on limited dataset and not compared with any of existing methods to prove their performance. Another CNN-based fire detection method utilizing VGG16 and Resnet50 models was proposed in [27], which was trained and tested on a very small dataset having 651 images and achieved accuracy of 93%. Another CNN-based fire detection technique [28] was proposed to implement smart surveillance, which was trained on two level datasets. The proposed model was huge in size (238Mb) and constrained to deploy on restricted hardware systems. In [29], an optimized tradeoff between accuracy and false rate is maintained along with keeping model size rational. Moreover, fire localization and detection network were proposed in [30] with minimized model scope, false alarm rate and high accuracy.
Early fire detection systems were proposed with machine learning to analyze sensor data and fire images to attain precise accuracy. In [31], a You Only Look Once (YOLO) based fire detection method was proposed, which was tested for flame recognition. The proposed model was learned on 196 images of fires and achieved an accuracy of 76%; however, training images were not sufficient to fully saturate the model. In [32], a smoke detection method using Deep Belief Network (DBN) was proposed, where model was trained on 482 images and achieved 95% accuracy. Using the optical flow method, a neural network of deep convolutional long recurrent networks was tested for real-time fire detection and combustion detection [33]. A dataset containing 10,000 images and 70 video frames was used to train and test the proposed method and achieved 93.3% accuracy. Results include false detection of lights and flames as fire, which could be controlled by using other sensors. In [34], A fuzzy algorithm was put forth for the purpose of detecting fires using input from several sensors. A hybrid approach for fire detection using fuzzy algorithm and CNN was proposed, which collected images from sensors and Closed-Circuit Television (CCTV) [35]. In this system, CCTV images were first preprocessed using CNN model to recognize fire, however these CNNs were unable to identify fire in blind spots where cameras can’t be deployed. To remedy this issue, fuzzy logic computes the probability of fire presence by analyzing image and sensor’s data. This method was named S-FDS and was more flexible, as it used static as well as rule-based algorithms.
Previously, many statistical techniques were used for data analytics. Each statistical algorithm can have unique characteristics based on its formula, the outcomes of its data analysis, and the algorithms to which it is related. Various Machine Learning (ML) techniques can be applied for data analysis too. L techniques can be categorized as either superficial learning or deep learning. Superficial learning algorithms concentrate on superficial data structures, such as SVM, Decision Trees, and K-means clustering. In contrast, deep learning algorithms deal with deep layered structures which include CNN, deep neural networks [36]. In real environments, deep learning models have shown to be more flexible and expressive, compared with shallow learning models. End-to-end recognition is difficult for DNN, because it has limited abstraction ability. Whereas CNN has high abstraction power and can analyze the image features to examine situation. In the beginning of fire, the flame is of small size and interval, in this situation it is difficult to capture image features from flame video data [37]. Fuzzy algorithms utilize membership functions to represent proximity to situations that cannot be clearly divided. The environment affects the range of the membership function of fuzzy algorithms, whereas general fuzzy algorithms disregard these variations. To overcome this limitation, an adaptive fuzzy algorithm is introduced which can update membership function. These adaptive fuzzy algorithms don’t filter out exemption data cause of errors in sensor data, which affects result’s accuracy.
A well performing and optimized approach is still a challenge, which should be optimally accurate, has less complexity and a low false alarming rate. Small amount of fire and identification of fire from a long distance is also a challenge for state-of-the-art methods. In this article, a hybrid model for classifying and detecting fire images in real-time environments is proposed. A 57-layer CNN architecture with 21 convolutional layers, 24 Rectified Linear Unit (ReLU) layers, 6 pooling layers, 3 fully connected layers, 2 dropout layers, and a softmax layer is proposed. Before training CNN model, Instance Segmentation (IS) is performed to efficiently segment the fire. To reduce the training and testing duration of the proposed model, an algorithm to extract key frames based on the correlation between consecutive frames is proposed. This article is structured as follows: section 2 describes the proposed classification and detection model and its application to real-world problems. Using publicly accessible datasets, Section 4 demonstrates the effectiveness of the proposed model. In the final section, conclusion and prospective work are presented.
2. Proposed Work
Early detection of fire becomes particularly challenging with factors like shadows, fire-like objects and changing lights. Traditional local features are inadequate to detect the fire due to the low accuracy and high false negative rate. Extracting local features for fire detection is also a time consuming and tedious task. These issues can be solved by extracting deep features using CNN models. After examining various pre-trained CNN models for target problems, a CNN model is proposed, which can classify and localize the fire at early stages. Figure 1 depicts the schematic representation of the proposed method.
2.1. Instance Segmentation
Semantic segmentation [38] is one of the famous segmentation techniques, which deals with problems of known classes, where each pixel of image must belong to one predefined class and pixels are used to evaluate the predictions. But semantic segmentation cannot be applied to segment fire, as the instances of fire are unknown and have different shades and colors on different intensities. This problem is solved by employing instance segmentation, which is more challenging than other pixel-level techniques due to the nature of the solving problems, where classes are unknown. The evaluation of instance segmentation requires a loss function which is invariant to the assignment of pixels into different clusters. As instance segmentation is generally performed to count the objects in an image, it proves useful to count the instances of fire in an image. The approach proposed in [39] is inspired by the counting process followed by humans. Humans count the objects by keeping track of accounted locations in an accurate spatial memory. Recurrent Convolutional Neural Networks (RCNNs) were used to segment the objects while saving the current state in spatial memory. However, for the purpose of fire segmentation, the RCNNs did not perform well, as the fire instances are, sometimes too small. To overcome this issue, the RCNN is replaced by Mask-RCNN, which provides improved results. The overall structure of instance segmentation utilized in this work is illustrated in Figure 2.
2.2. Deep CNN Architecture
A novel CNN model is proposed in this article, as the existing pre-trained models are trained on a large dataset ImageNet [40] containing classes. The weights and activations of pre-trained networks are adjusted according to the images in ImageNet dataset. These pre-trained models are structured in such a way that a single model can be utilized to classify multiple problems. It makes these networks too complex for classifying the simpler problems containing fewer classes. The parameters of our proposed network are updated by training it on fire and non-fire images only, which makes it more problem oriented. The proposed network contains 57 layers, including 21 convolutional, 24 ReLU, 6 pooling, 3 fully connected, 2 dropouts, and a softmax layer. The network accepts an input of size and softmax layer provides features. The overall structure of the proposed model is shown in Figure 3. As the input images are already segmented, the activations on each layer remain consistent and reduce gradually. The purpose of this arrangement is to learn all the possible features of fire along with different shades and intensities. The segmented images proved vital to train a network, capable of training a strong classifier and detector at the same time.
The structure of CNN model is divided into blocks, where each block increases the number of convolutional and ReLU layers by 1 and ends on an average pooling layer. The input is forwarded to block , where only combination of convolutional and ReLU layer applies filters of size for generating feature maps. Average pooling with a stride of pixels is employed to shrink the size of feature map and retaining the useful attributes by discarding the less important features. In second block, combinations of convolutional and ReLU layers apply and filters of size and respectively and generate feature maps. The average pooling of this block reduces the feature maps to . Blocks to contains and combinations of convolutional and ReLU layers respectively and apply different number of filters to further convolved the input image. The average pooling of block provides a descriptor map of size , which is forwarded to fully connected layers, where FC6 and FC7 layers extract features, while FC8 extracts features. The softmax layer provides the out of features. Detailed overview of layers along with adjusted parameters are catalogued in Table 1.
2.3. Key Frames Extraction
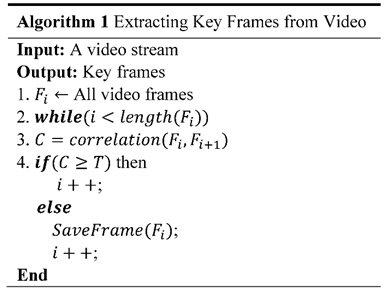
The amount of video data collected from surveillance increases every day. Fire events occur rarely and if fire needs to be detected on a particular day or hour, it is still a tedious task to process and verify each frame from the video. If frames are extracted from one-hour video at 30fps, there will be frames and checking all these frames will take some serious amount of time. The execution and processing time reduces dramatically by only extracting key frames from a video. In this article, a method is utilized to extract only key frames by ignoring the duplicate frames. This is achieved by calculating the correlation between two consecutive frames. If the correlation (C) is greater than or equal to the threshold value (T), the relationship is considered significant, and the images are similar, else the frames are considered as key frames. The overall flow of extracting key frames is explained in Algorithm 1. Flow diagram is also shown in Figure 4.
2.4. Fire Classification and Localization
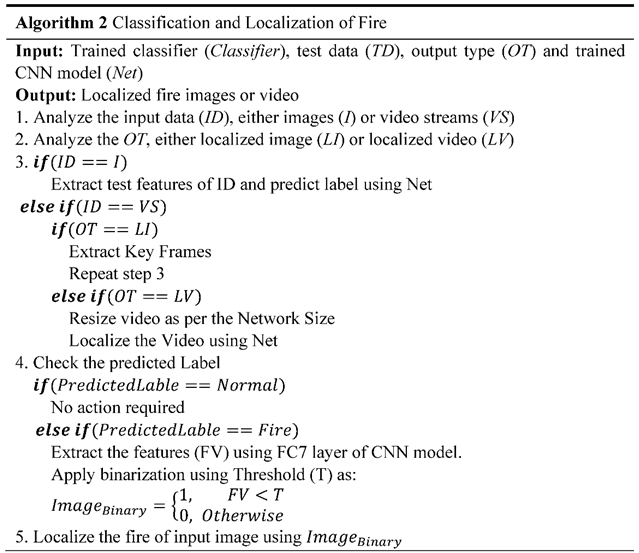
The proposed CNN architecture is designed to automatically learn robust features from raw fire data in both indoor and outdoor environments. Segmented fire images are provided as training data to label the test data as fire or normal images. This decision is based on the probability score of the CNN model. Once the fire and normal images are classified, the next step is to localize the fire within an image. Algorithms 2 describes the fire classification and localization process.
By sending test data to a trained classifier, which can be an image or a video stream, fire can be localized. Features are taken from the image and its label are predicted if it is an image, and from the video frames if it is a video stream. Following the creation of a binary image utilizing the defined threshold and the predicted fire picture, the localization of the fire instances inside the image or video frame is subsequently accomplished.
2.5. Fire Analysis
At this point, the input images or videos containing fire are localized. Next step is to analyze the fire intensity and severity as many post-fire assessments are based on this information. The intensity of fire mainly depends upon the distance between the camera and burning object. This distance is calculated by performing pre-processing steps like identifying all objects in an image, measuring the distance between camera and burning object, and measuring the area of burning object. Objects are identified by training the proposed CNN model on sub-part of a famous object dataset Caltech101 [41]. The selected part of the dataset contains 23 classes which can catch fire. The dimensions of these classes are preset to a default width and height. The other step of this analysis is to predict the severity of fire for taking the post-fire actions. Categorizing the fire level can determine either to contact the house owner or fire brigade. These fire levels are regarded as low, moderate and high severity. Algorithm 3 is used to determine the intensity of fire and take necessary post-fire steps.
| Algorithm 3 Determining Intensity and Severity of Fire |
| Input: Labelled Image |
| Output: Alert concerning person/department |
| 1. Trained Proposed CNN model on 23 classes |
| 2. Input Image |
| 3. Extracted objects from using Instance Segmentation |
| 4. |
| 5. |
| 6. |
| 7. |
| 8. |
| 9. |
| 10. then Object is times bigger and each pixels will be equal to 1 pixel |
| then Object is either equal or times smaller and each pixel will be equal to pixels in case of smaller object |
| 11. |
| 12. |
| 13. , |
| 14. |
| 15. then label fire as High Severity. then label fire as Medium Severity. then label fire as Low Severity. |
The magnitude of the fire instance is used as the basis for fire analysis. Instance segmentation is first carried out to detect fire items, after which the difference between the real and anticipated objects is determined. Fire pixels are calculated to accurately anticipate the fire severity after this difference has been calculated.
3. Experimental Results and Discussion:
This section describes the investigations that are conducted to validate the proposed method. The information is described, including the experimental setup and the selected dataset. These dataset’s results are presented, followed by a comparison with extant techniques for fire detection and localization. Finally, a comprehensive discussion verifies the approach’s robustness and efficacy.
3.1. Experimental Setup
The proposed CNN model is trained using MATLAB 2022a on an NVIDIA GeForce GTX 1080 with an overall computation capability of 6.1, a clock rate of 1,607-1,733 MHz, and 7 multiprocessors. Stochastic Gradient Descent with Momentum (SGDM) is the algorithm that represents the 64-minibatch training technique. The initial learning rate is fixed at 0.01 and decreased by a factor of 5 every 5 generations. Momentum is set at 0.7, and the utmost number of epochs is set to 150. Cross-Entropy [41] is used as a suitable loss function because it has proven to be reasonable for many multiclass problems. The data is divided according to the standard proportions of 70-15-15 for training, testing, and validation, respectively.
3.2. Experimental Results
The publicly available dataset contains 32 videos including 22 fire videos and 10 normal videos. The videos have 24fps rate, which makes a total of 64,049 frames of fires and 25,511 frames of normal images and a grand total of 89,560 frames. The complexity, size and background colors make this dataset challenging. The normal images contain fire-like objects, which makes the detection and classification even harder. Figure 5 illustrates a few test images, one frame each from all videos, while Table 2 presents basic description for this dataset.
In the proposed system, the initial instance segmentation proves vital as it helps the model to learn only fire features. The parameters of Mask-RCNN are learned using backpropagation. To prevent the effect of exploding gradient, gradients are clipped to make sure that each of their elements remains under the absolute value of 3. Adam optimization algorithm [42] is applied to train the network by using initial learning rate of and reducing it by 0.1 of each error. As there was no overfitting during preliminary experiments, neither l2 regularization nor dropout was utilized throughout the segmentation process. Mini-batch size was set to 8 images per batch and initial weights of Mask-RCNN were randomly initialized within the range of [-0.04 - 0.04]. The results of instance segmentation on some sample images from a smaller dataset are presented in Figure 6, while the results of proposed system are illustrated in Figure 7.
The proposed CNN model performs well on this dataset by maintaining a low false positive rate and high accuracy. The training time and prediction time is also noteworthy. Different experiments are performed including utilizing pre-trained models like AlexNet [43], InceptionV3 [44] and SuqeezeNet [45] before and after the fine-tuning. All these networks are also serially used to note the impact. The proposed network is also experimented with before and after fine-tuning as well as before and after adding the instance segmentation module. The outcomes of all these experiments are shown in Table 3. It can be clearly seen that the pre-trained models, fused models and model without instance segmentation could not outperform the proposed model.
This is notable that the training time increases when instance segmentation is applied on the proposed approach, but the FPR and FNR rates are decreased to the minimum with the lowest prediction time of 0.08 seconds. The maximum accuracy is also noted at 95.25%, which is better than existing state-of-the-art techniques.
3.3. Robustness of Proposed Model:
The success of a fire detection system lies in its robustness against well-known attacks in uncertain environments. This section investigates the robustness of the proposed system by employing different attacks like fire-blockage and noise. Figure 8 shows that the proposed system performs well in most cases under uncertain environments and weather conditions. It can be clearly seen that the proposed system achieved efficient results on certain attacks. The fire analysis is carried out by testing images from the real-world and it achieved effective results as well. Figure 9 and Figure 10 show that the algorithm provides necessary information regarding the fire intensity and object on fire.
3.4. Discussion:
A system to detect fire on early stages was proposed utilizing CNNs and IoMTs for disaster management where a fine-tuned AlexNet model is used to detect fire with an accuracy of 94.39% and false positive rate of 9.07% [46]. Many techniques are proposed, which utilizes the color shape and motion features and achieved an overall accuracy between 87%-90% [47,48,49]. But these techniques proved vulnerable when fire-like objects are identified within the scene. In another technique, the moving objects were initially detected to deal with the environmental changes throughout the timespan. These objects were then preprocessed by subtracting the background to extract the fire instances. The instances were evaluated based on color, shape and difference between two consecutive frames in a video. Achieved accuracy of this technique was 95.55% with a false positive rate of 11.76% [50]. A transfer learning technique was implemented utilizing a pre-trained network AlexNet to detect the fire at early stages. The proposed model was later fine-tuned using a SqueezeNet network, which reduced the size and feasibility of the approach to achieve an accuracy of 94.50% and false positive rate of 8.87% [30]. Table 4 shows experimental results along with comparison to the previous techniques.
In this work, a hybrid model is proposed, as shown in Figure 1, utilizing instance segmentation along CNN architecture as shown in Figure 2. The parameters of CNN are provided in Table 1, while the structure of CNN model is shown in Figure 3. As the proposed model is trained and tested on video datasets, an algorithm is proposed, as shown in Figure 4 and explained in Algorithm 1, to extract key frames by calculating the correlation between consecutive pixels. After the extraction of key frames, the model is trained to classify and localize the fire in an image. Initially, the CNN model is trained on dataset to classify images, while the detector is trained on a subpart of a well-known dataset Caltech-101. Detector provides information regarding the object on fire while the fire is analyzed as per the proposed algorithm. The overall procedure of classification, localization and fire analysis is explained in Algorithm 2 and Algorithm 3. Description of utilized dataset is explained in Table 2, while Figure 5 shows some samples frames from each of the dataset videos. Results of instance segmentation are illustrated in Figure 6, while detection and localization results are shown in Figure 7. Table 4 shows classification results of different experiments. The robustness of the proposed model is checked against several attacks like injecting noise, blocking fire, rotation and flipping operations. Achieved results are shown in Figure 8, Figure 9 and Figure 10. The model achieved improved results than previously proposed state-of-the-art methods and compared in Table 4.
4. Conclusion
In this article, an automated system combining the properties of IS and CNN architecture is proposed to classify and detect fire in real-time environment. The CNN architecture is 57-layer deep, containing convolutional layers, ReLU layers, pooling layers, fully connected layers, dropout layers and a softmax layer. Training in CNN architecture is optimized by employing IS, which efficiently extracts the fire from images and video frames. To minimize the training and testing time of proposed model, an algorithm is proposed to extract key frames based on correlation between consecutive frames. The robustness of the proposed model is verified by testing it on real-time data, where the model achieved improved results than state-of-the-art methods. As for future work, the CNN model with more depth can be utilized and dimensionality can be reduced by implementing feature optimizing techniques. Key-frames can also be extracted by employing methods like Genetic Algorithm (GA) to improve the output of any model.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Gaur, A.; et al. Fire sensing technologies: A review. IEEE Sensors Journal 2019, 19, 3191–3202. [Google Scholar] [CrossRef]
- Ahrens, M. Trends and patterns of US fire loss. National Fire Protection Association (NFPA) report Google Scholar, 2017.
- Fonollosa, J.; Solórzano, A.; Marco, S. Chemical sensor systems and associated algorithms for fire detection: A review. Sensors 2018, 18, 553. [Google Scholar] [CrossRef] [PubMed]
- Li, J.; et al. Long-range raman distributed fiber temperature sensor with early warning model for fire detection and prevention. IEEE sensors journal 2019, 19, 3711–3717. [Google Scholar] [CrossRef]
- Li, P.; Zhao, W. Image fire detection algorithms based on convolutional neural networks. Case Studies in Thermal Engineering 2020, 19, 100625. [Google Scholar] [CrossRef]
- Wang, H.; Fang, X.; Li, Y.; Zheng, Z.; Shen, J. Research and application of the underground fire detection technology based on multi-dimensional data fusion. Tunnelling and Underground Space Technology 2021, 109, 103753. [Google Scholar] [CrossRef]
- Pathak, N.; Misra, S.; Mukherjee, A.; Kumar, N. HeDI: Healthcare Device Interoperability for IoT-Based e-Health Platforms. IEEE Internet of Things Journal 2021. [CrossRef]
- Kumar, M.; Raju, K.S.; Kumar, D.; Goyal, N.; Verma, S.; Singh, A. An efficient framework using visual recognition for IoT based smart city surveillance. Multimedia Tools and Applications 2021, 1–19. [Google Scholar] [CrossRef]
- Dugdale, J.; Moghaddam, M.T.; Muccini, H. IoT4Emergency: Internet of Things for Emergency Management. ACM SIGSOFT Software Engineering Notes 2021, 46, 46–33. [Google Scholar] [CrossRef]
- Guha-Sapir, D.; Hoyois, P. Estimating populations affected by disasters: A review of methodological issues and research gaps; Centre for Research on the Epidemiology of Disasters (CRED), Institute of Health and Society (IRSS), University Catholique de Louvain: Brussels, 2015. [Google Scholar]
- Khalil, A.; Rahman, S.U.; Alam, F.; Ahmad, I.; Khalil, I. Fire Detection Using Multi Color Space and Background Modeling. Fire Technology 2020, 1–19. [Google Scholar] [CrossRef]
- Xie, Y.; et al. Efficient Video Fire Detection Exploiting Motion-Flicker-Based Dynamic Features and Deep Static Features. IEEE Access 2020, 8, 81904–81917. [Google Scholar] [CrossRef]
- Luo, Y.; Zhao, L.; Liu, P.; Huang, D. Fire smoke detection algorithm based on motion characteristic and convolutional neural networks. Multimedia Tools and Applications 2018, 77, 15075–15092. [Google Scholar] [CrossRef]
- Khudayberdiev, O.; Butt, M.H.F. Fire detection in Surveillance Videos using a combination with PCA and CNN. Academic Journal of Computing & Information Science 2020, 3. [Google Scholar] [CrossRef]
- Rashid, M.; Shah, J.H.; Sharif, M.; Awan, M.Y.; Alkinani, M.H. An optimized approach for breast cancer classification for histopathological images based on hybrid feature set. Current Medical Imaging 2021, 17, 136–147. [Google Scholar] [CrossRef]
- Khan, M.-A.; et al. A Blockchain Based Framework for Stomach Abnormalities Recognition. Computers, Materials & Continua 2021, 67, 141–158. [Google Scholar] [CrossRef]
- Khan, M.A.; Alhaisoni, M.; Saba, T.; Rehman, A.; Iqbal, T. A hybrid deep learning architecture for the classification of superhero fashion products: An application for medical-tech classification. Computer Modeling in Engineering & Sciences 2020, 124, 1017–1033. [Google Scholar] [CrossRef]
- Khan, M.A.; Armghan, A.; Javed, M.Y. SCNN: A Secure Convolutional Neural Network using Blockchain. In Proceedings of the 2020 2nd International Conference on Computer and Information Sciences (ICCIS), 2020; IEEE; pp. 1–5. [Google Scholar]
- Nasir, I.M.; et al. Pearson correlation-based feature selection for document classification using balanced training. Sensors 2020, 20, 6793. [Google Scholar] [CrossRef]
- Nasir, I.M.; et al. Deep Learning-Based Classification of Fruit Diseases: An Application for Precision Agriculture. CMC-COMPUTERS MATERIALS & CONTINUA 2021, 66, 1949–1962. [Google Scholar] [CrossRef]
- Raza, M.; Shah, J.H.; Khan, M.A.; Rehman, A. Human action recognition using machine learning in uncontrolled environment. In Proceedings of the 2021 1st International Conference on Artificial Intelligence and Data Analytics (CAIDA), 2021; IEEE; pp. 182–187. [Google Scholar]
- Raza, M.; Shah, J.H.; Wang, S.-H.; Tariq, U.; Khan, M.A. HAREDNet: A deep learning based architecture for autonomous video surveillance by recognizing human actions. Computers and Electrical Engineering 2022, 99, 107805. [Google Scholar] [CrossRef]
- Tariq, J.; et al. Fast intra mode selection in HEVC using statistical model. Computers, Materials and Continua 2022, 70, 3903–3918. [Google Scholar] [CrossRef]
- Mushtaq, I.; Umer, M.; Imran, M.; Muhammad, G.; Shorfuzzaman, M. Customer prioritization for medical supply chain during COVID-19 pandemic. Computers, Materials and Continua 2021, 59–72. [Google Scholar] [CrossRef]
- Raza, M.; Ulyah, S.M.; Shah, J.H.; Fitriyani, N.L.; Syafrudin, M. ENGA: Elastic Net-Based Genetic Algorithm for human action recognition. Expert Systems with Applications 2023, 227, 120311. [Google Scholar] [CrossRef]
- Frizzi, S.; Kaabi, R.; Bouchouicha, M.; Ginoux, J.-M.; Moreau, E.; Fnaiech, F. Convolutional neural network for video fire and smoke detection. In Proceedings of the IECON 2016-42nd Annual Conference of the IEEE Industrial Electronics Society, 2016; IEEE; pp. 877–882. [Google Scholar]
- Sharma, J.; Granmo, O.-C.; Goodwin, M.; Fidje, J.T. Deep convolutional neural networks for fire detection in images. In Proceedings of the International conference on engineering applications of neural networks, 2017; Springer; pp. 183–193. [Google Scholar] [CrossRef]
- Muhammad, K.; Ahmad, J.; Baik, S.W. Early fire detection using convolutional neural networks during surveillance for effective disaster management. Neurocomputing 2018, 288, 30–42. [Google Scholar] [CrossRef]
- Muhammad, K.; Ahmad, J.; Mehmood, I.; Rho, S.; Baik, S.W. Convolutional neural networks based fire detection in surveillance videos. IEEE Access 2018, 6, 18174–18183. [Google Scholar] [CrossRef]
- Muhammad, K.; Ahmad, J.; Lv, Z.; Bellavista, P.; Yang, P.; Baik, S.W. Efficient deep CNN-based fire detection and localization in video surveillance applications. IEEE Transactions on Systems, Man, and Cybernetics: Systems 2018, 49, 1419–1434. [Google Scholar] [CrossRef]
- Shen, D.; Chen, X.; Nguyen, M.; Yan, W.Q. Flame detection using deep learning. In Proceedings of the 2018 4th International conference on control, automation and robotics (ICCAR); IEEE; pp. 416–420.
- Kaabi, R.; Sayadi, M.; Bouchouicha, M.; Fnaiech, F.; Moreau, E.; Ginoux, J.M. Early smoke detection of forest wildfire video using deep belief network. In Proceedings of the 2018 4th International Conference on Advanced Technologies for Signal and Image Processing (ATSIP); IEEE; pp. 1–6.
- Hu, C.; Tang, P.; Jin, W.; He, Z.; Li, W. Real-time fire detection based on deep convolutional long-recurrent networks and optical flow method. In Proceedings of the 2018 37th Chinese Control Conference (CCC); IEEE; pp. 9061–9066.
- Saputra, F.A.; Al Rasyid, M.U.H.; Abiantoro, B.A. Prototype of early fire detection system for home monitoring based on Wireless Sensor Network. In Proceedings of the 2017 International Electronics Symposium on Engineering Technology and Applications (IES-ETA); IEEE; pp. 39–44.
- Jang, J.-Y.; Lee, K.-W.; Kim, Y.-J.; Kim, W.-T. S-FDS: A Smart Fire Detection System based on the Integration of Fuzzy Logic and Deep Learning. Journal of the Institute of Electronics and Information Engineers 2017, 54, 50–58. [Google Scholar]
- Yao, J.; et al. Predicting the minimum height of forest fire smoke within the atmosphere using machine learning and data from the CALIPSO satellite. Remote sensing of environment 2018, 206, 98–106. [Google Scholar] [CrossRef]
- Xu, S.S.; Mak, M.-W.; Cheung, C.-C. Deep neural networks versus support vector machines for ECG arrhythmia classification. In Proceedings of the 2017 IEEE International Conference on Multimedia & Expo Workshops (ICMEW); IEEE; pp. 127–132.
- Brostow, G.J.; Fauqueur, J.; Cipolla, R. Semantic object classes in video: A high-definition ground truth database. Pattern Recognition Letters 2009, 30, 88–97. [Google Scholar] [CrossRef]
- Bolya, D.; Zhou, C.; Xiao, F.; Lee, Y.J. Yolact: Real-time instance segmentation. In Proceedings of the IEEE/CVF International Conference on Computer Vision; 2019; pp. 9157–9166. [Google Scholar]
- Deng, J.; Dong, W.; Socher, R.; Li, L.-J.; Li, K.; Fei-Fei, L. Imagenet: A large-scale hierarchical image database. In Proceedings of the 2009 IEEE conference on computer vision and pattern recognition; IEEE; pp. 248–255.
- Kinnunen, T.; Kamarainen, J.-K.; Lensu, L.; Lankinen, J.; Käviäinen, H. Making visual object categorization more challenging: Randomized caltech-101 data set. In Proceedings of the 2010 20th International Conference on Pattern Recognition; IEEE; pp. 476–479.
- Jais, I.K.M.; Ismail, A.R.; Nisa, S.Q. Adam optimization algorithm for wide and deep neural network. Knowl. Eng. Data Sci 2019, 2, 41–46. [Google Scholar] [CrossRef]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. Imagenet classification with deep convolutional neural networks. Advances in neural information processing systems 2012, 25, 1097–1105. [Google Scholar] [CrossRef]
- Szegedy, C.; Vanhoucke, V.; Ioffe, S.; Shlens, J.; Wojna, Z. Rethinking the inception architecture for computer vision. In Proceedings of the IEEE conference on computer vision and pattern recognition; 2016; pp. 2818–2826. [Google Scholar]
- Iandola, F.N.; Han, S.; Moskewicz, M.W.; Ashraf, K.; Dally, W.J.; Keutzer, K. SqueezeNet: AlexNet-level accuracy with 50x fewer parameters and<0.5 MB model size. arXiv preprint 2016, arXiv:1602.07360. [Google Scholar]
- Bellavista, P.; Ota, K.; Lv, Z.; Mehmood, I.; Rho, S. Towards smarter cities: Learning from Internet of Multimedia Things-generated big data. ed: Elsevier, 2020.
- Rafiee, A.; Dianat, R.; Jamshidi, M.; Tavakoli, R.; Abbaspour, S. Fire and smoke detection using wavelet analysis and disorder characteristics. In Proceedings of the 2011 3rd International Conference on Computer Research and Development, vol. 3, 2011; IEEE; pp. 262–265. [Google Scholar]
- Habiboğlu, Y.H.; Günay, O.; Çetin, A.E. Covariance matrix-based fire and flame detection method in video. Machine Vision and Applications 2012, 23, 1103–1113. [Google Scholar] [CrossRef]
- Chen, T.-H.; Wu, P.-H.; Chiou, Y.-C. An early fire-detection method based on image processing. In Proceedings of the 2004 International Conference on Image Processing, 2004. ICIP’04; IEEE; vol. 3, pp. 1707–1710.
- Foggia, P.; Saggese, A.; Vento, M. Real-time fire detection for video-surveillance applications using a combination of experts based on color, shape, and motion. IEEE TRANSACTIONS on circuits and systems for video technology 2015, 25, 1545–1556. [Google Scholar] [CrossRef]
Figure 1.
Schematic representation of the proposed method.
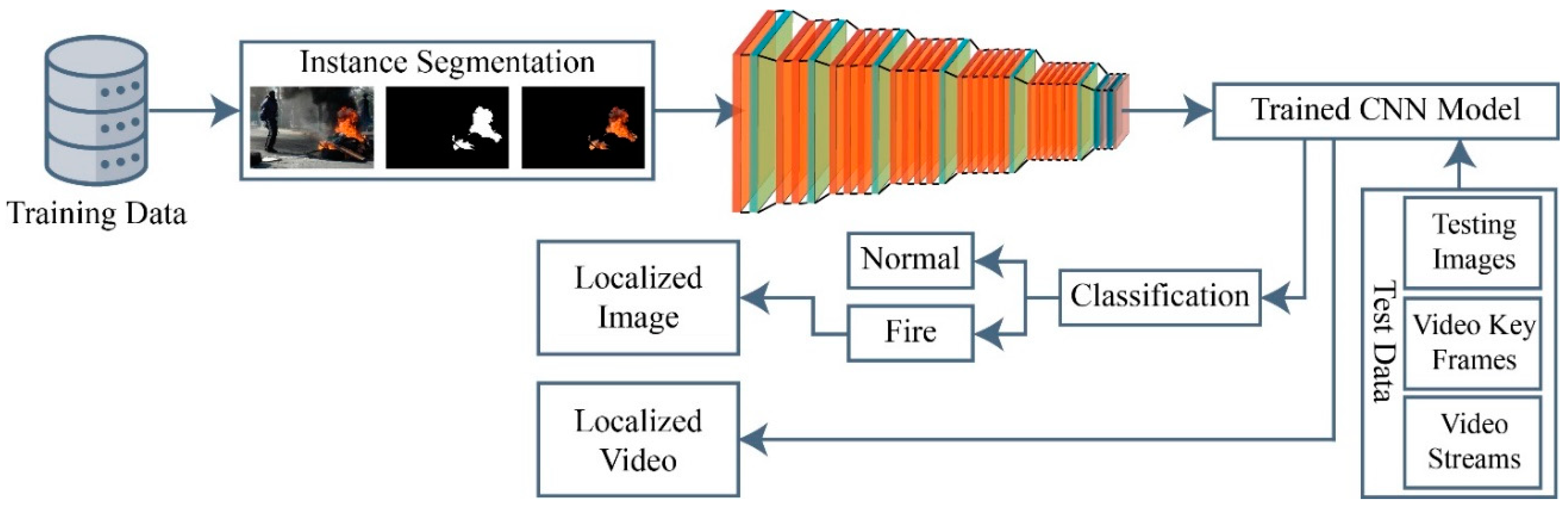
Figure 2.
Structure of instance segmentation.
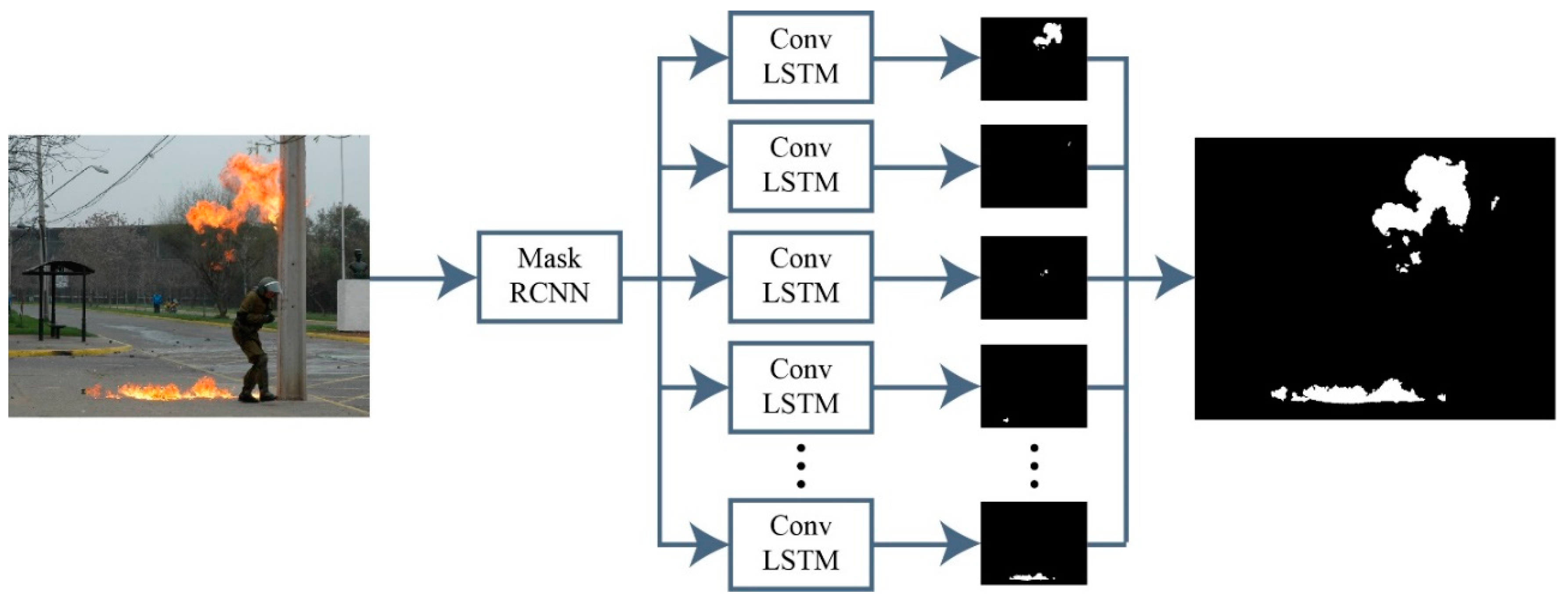
Figure 3.
Architecture of proposed CNN model.
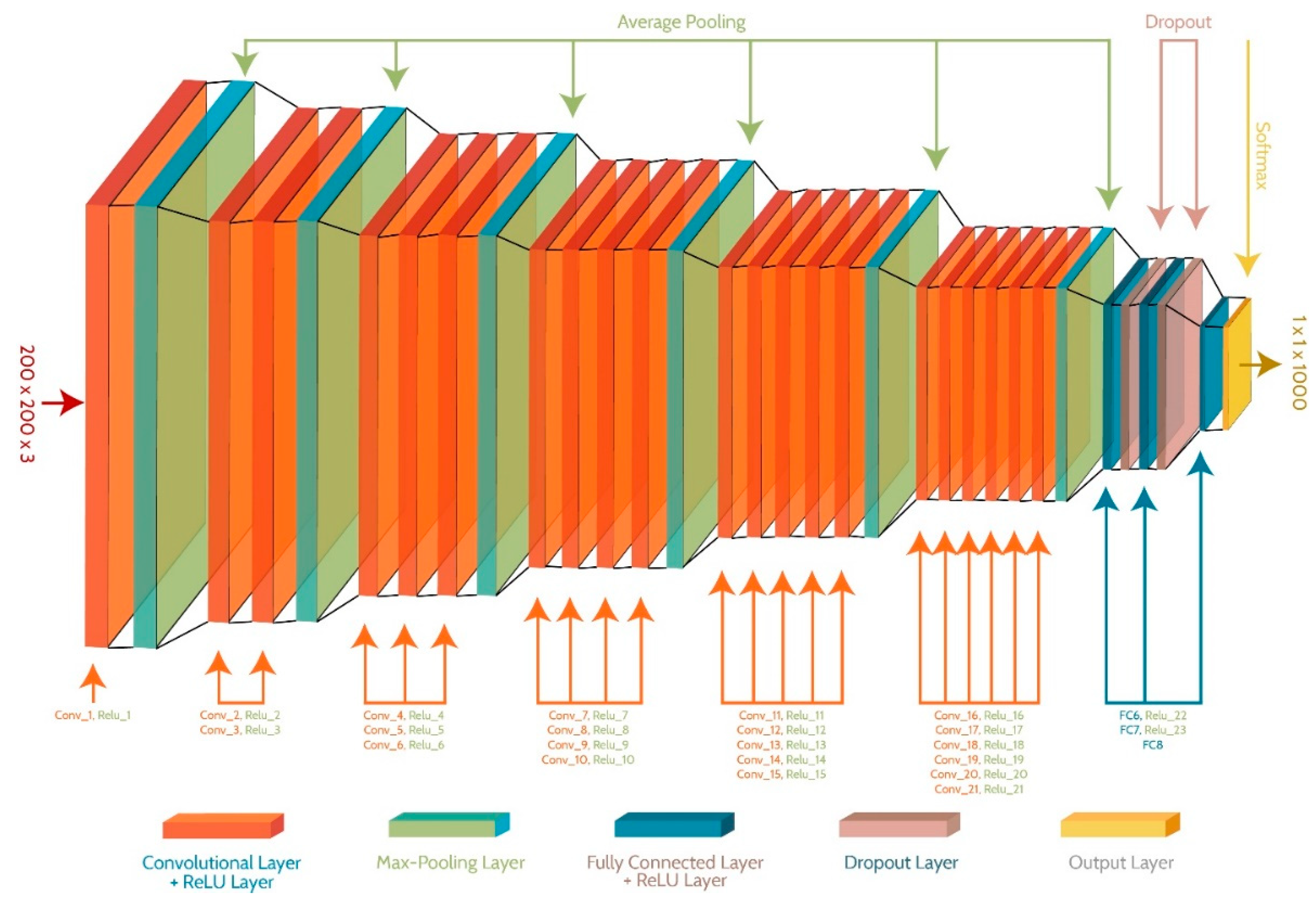
Figure 4.
Flow diagram to extract key frames.
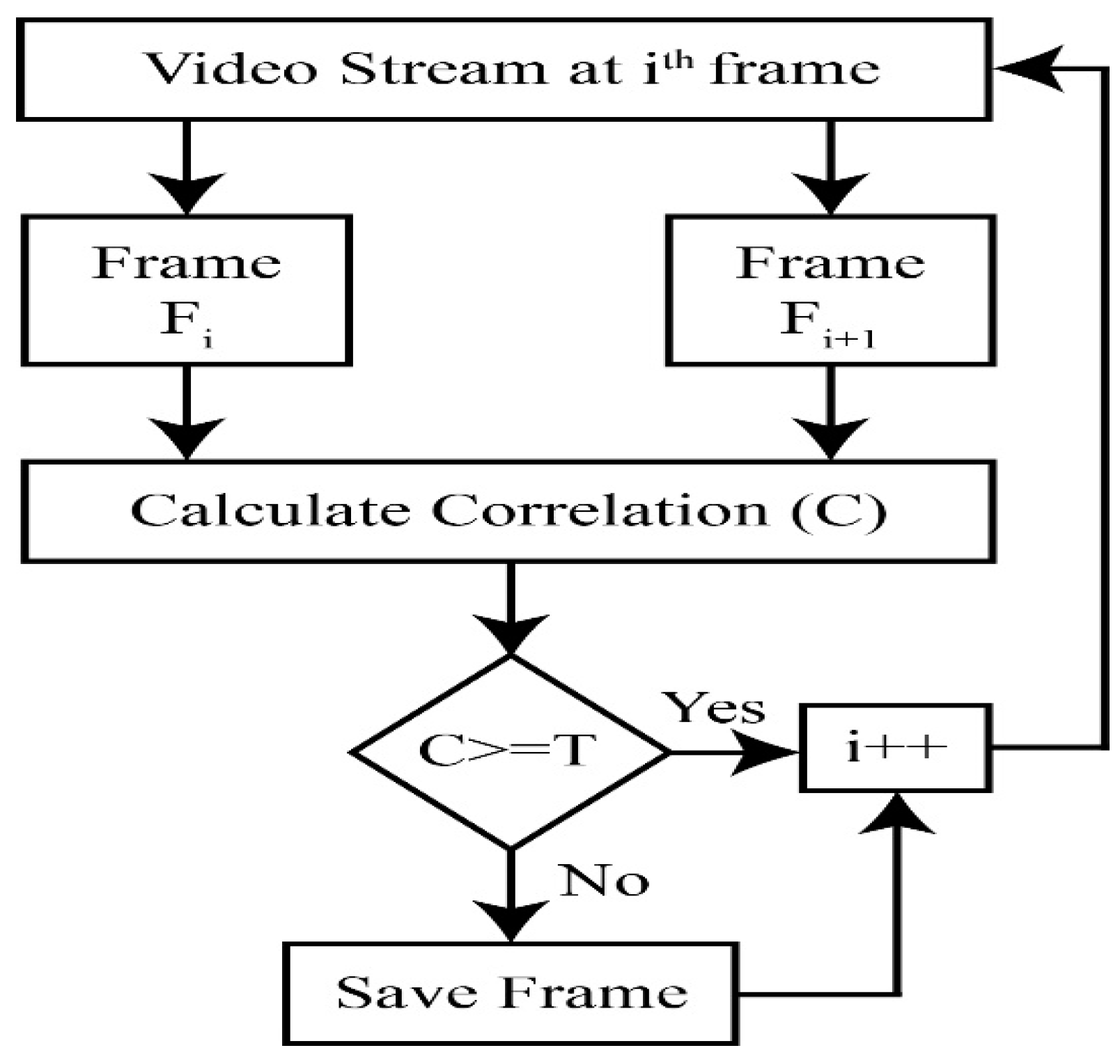
Figure 5.
Sample videos from dataset.
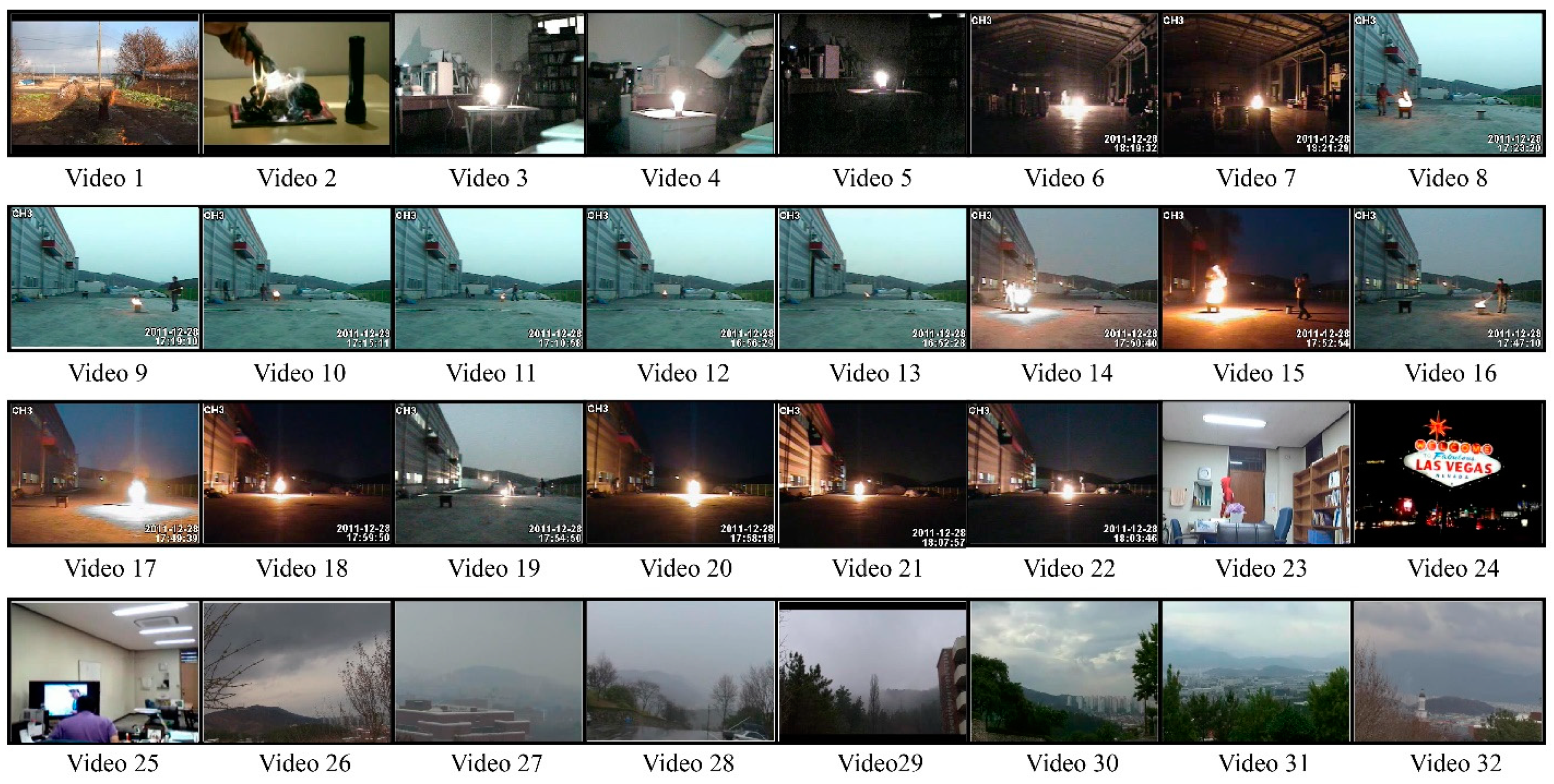
Figure 6.
Results of instance segmentation. (a) Input image. (b) Ground-truth image. (c) Segmented image using instance segmentation.
Figure 6.
Results of instance segmentation. (a) Input image. (b) Ground-truth image. (c) Segmented image using instance segmentation.
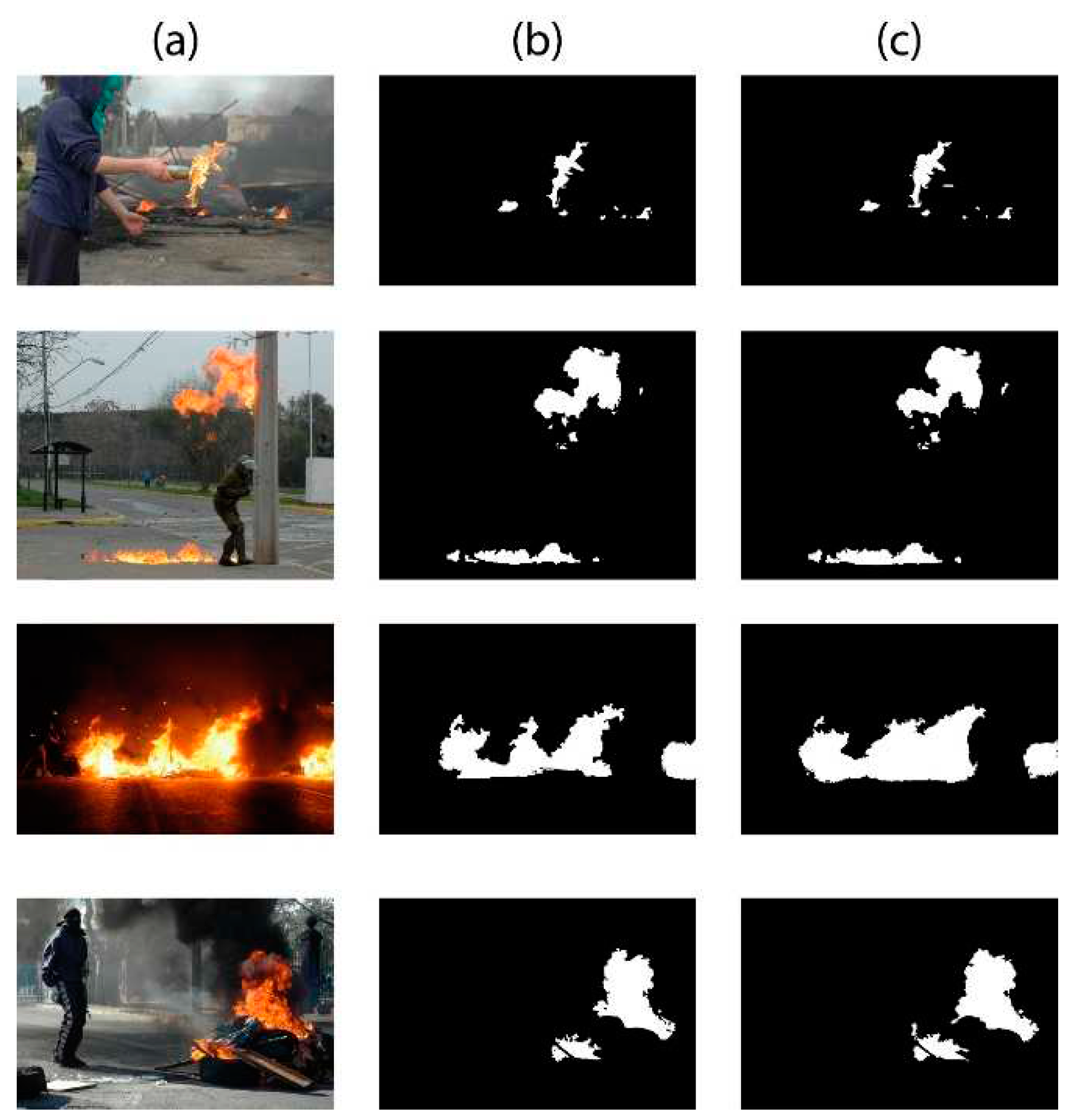
Figure 7.
Results of proposed model. (a) Original image. (b) Binary image extracted using instance segmentation. (c) Segmented image. (d) Boundary image, localized by detector. (e) Final predicted image.
Figure 7.
Results of proposed model. (a) Original image. (b) Binary image extracted using instance segmentation. (c) Segmented image. (d) Boundary image, localized by detector. (e) Final predicted image.
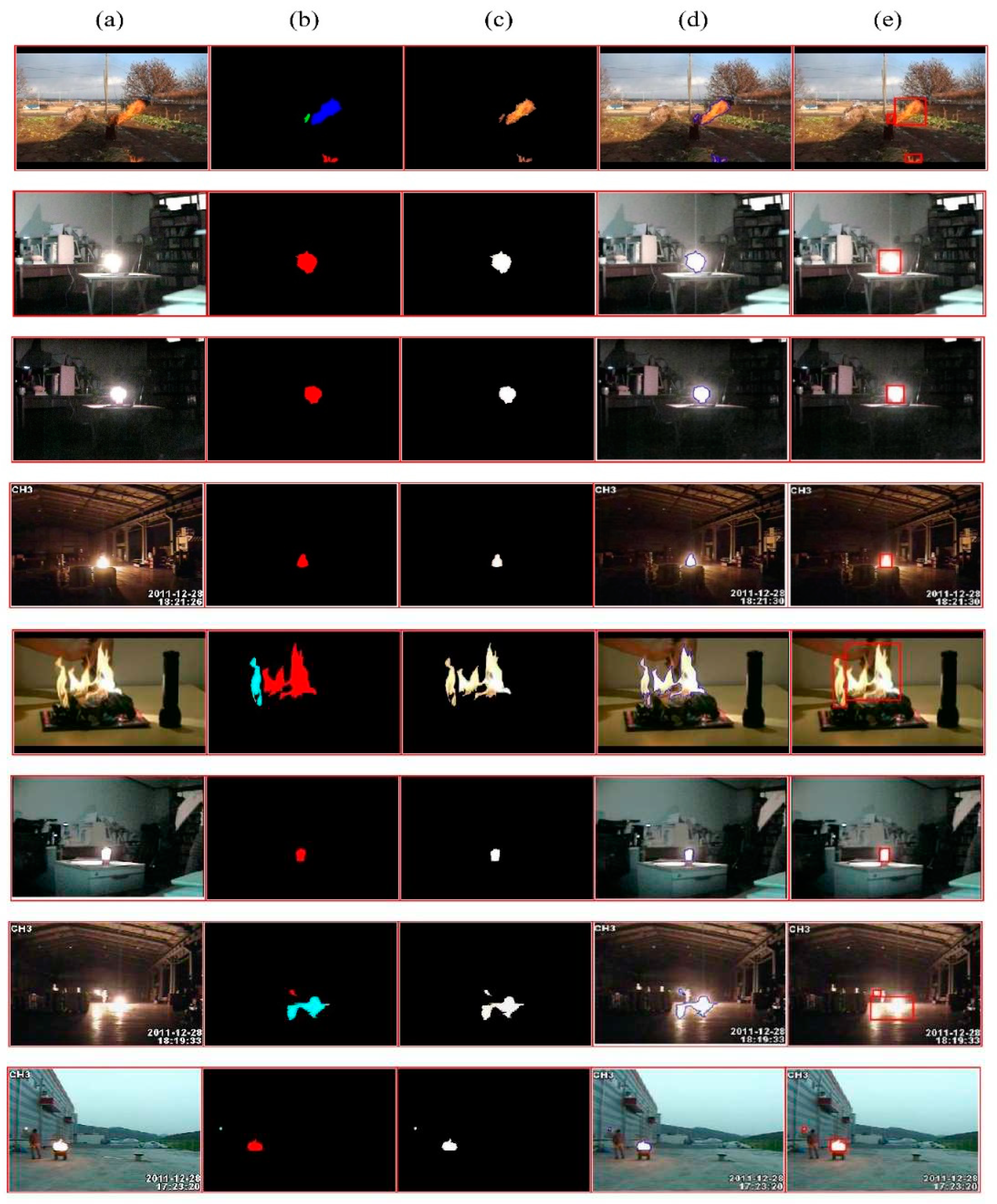
Figure 8.
Robustness of proposed model on different noisy conditions.
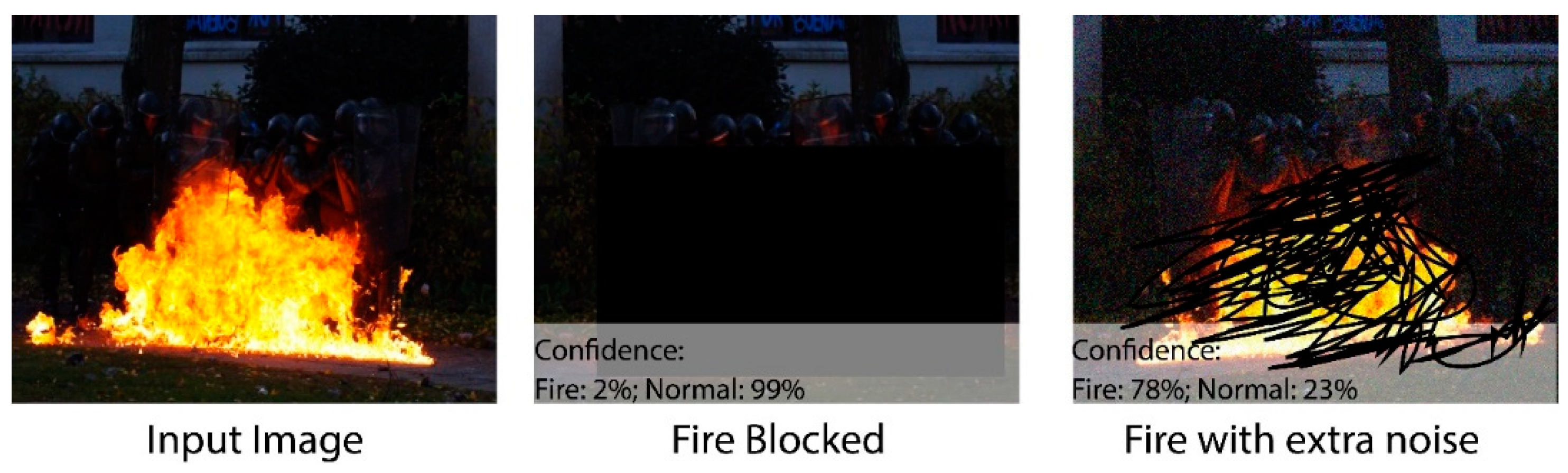
Figure 9.
Output of proposed model on fire as well as fire like objects (first two rows). Output of proposed model on different kind of noises (last two rows).
Figure 9.
Output of proposed model on fire as well as fire like objects (first two rows). Output of proposed model on different kind of noises (last two rows).
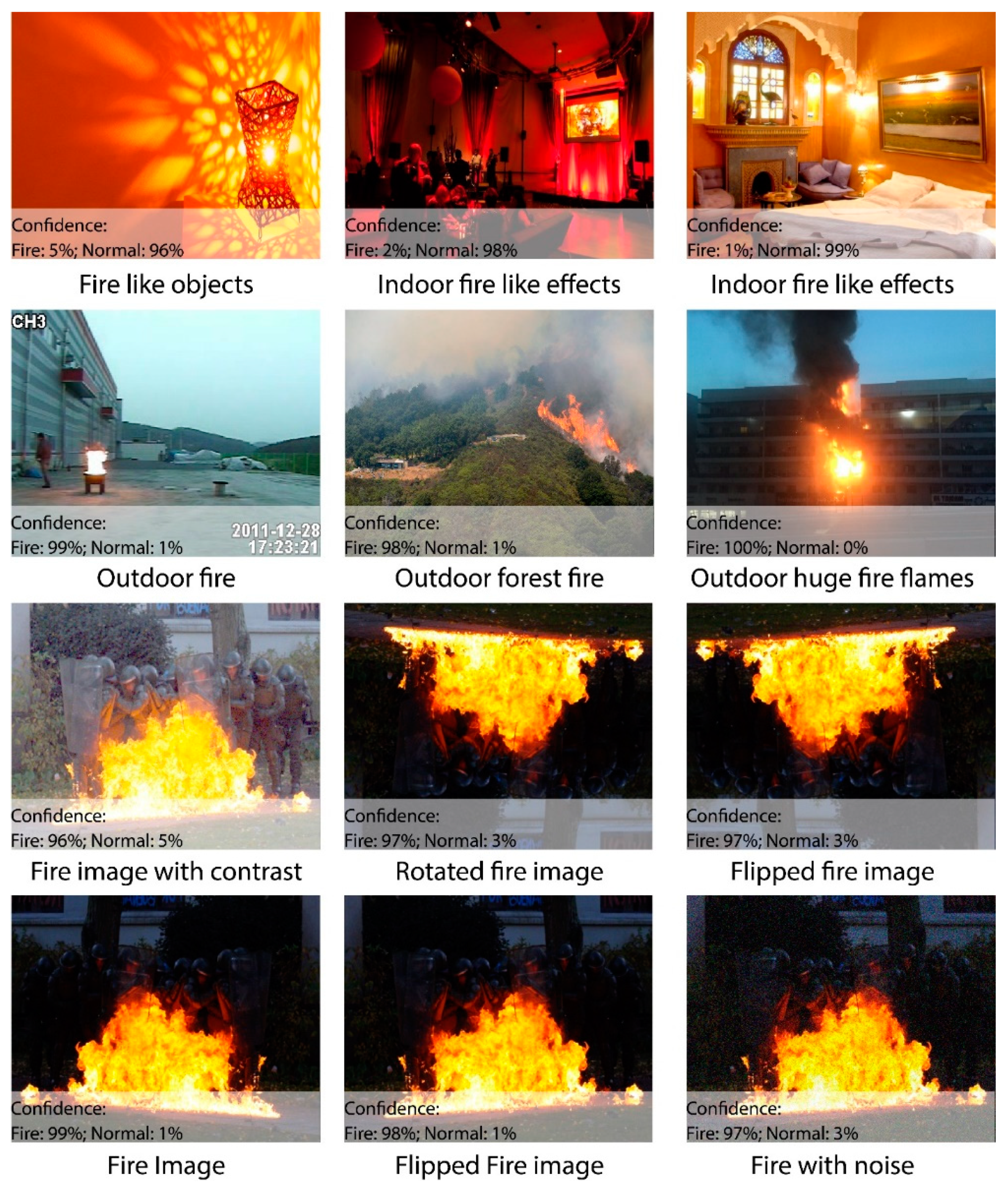
Figure 10.
Output of proposed model on different fire and non-fire scenarios.


Table 1.
Detailed overview of layers along with adjusted parameters.
| Combinations | Filters | Total Filters | Stride Size | Weight Size | Bias Vector | Activations |
|---|---|---|---|---|---|---|
| Input Layer | ||||||
| Convolutional + ReLU | ||||||
| Max Pooling | ||||||
| Convolutional + ReLU | ||||||
| Convolutional + ReLU | ||||||
| Max Pooling | ||||||
| Convolutional + ReLU | ||||||
| Convolutional + ReLU | ||||||
| Convolutional + ReLU | ||||||
| Max Pooling | ||||||
| Convolutional + ReLU | ||||||
| Convolutional + ReLU | ||||||
| Convolutional + ReLU | ||||||
| Convolutional + ReLU | ||||||
| Max Pooling | ||||||
| Convolutional + ReLU | ||||||
| Convolutional + ReLU | ||||||
| Convolutional + ReLU | ||||||
| Convolutional + ReLU | ||||||
| Convolutional + ReLU | ||||||
| Max Pooling | - | - | ||||
| Convolutional + ReLU | ||||||
| Convolutional + ReLU | ||||||
| Convolutional + ReLU | ||||||
| Convolutional + ReLU | ||||||
| Convolutional + ReLU | ||||||
| Convolutional + ReLU | ||||||
| Max Pooling | ||||||
| FC6 + ReLU + Dropout | ||||||
| FC7 + ReLU + Dropout | ||||||
| FC8 | ||||||
| Softmax |
Table 2.
Basic description of dataset.
| Video Name | Original File Name | Resolution | Frames | Modality | Total Frames |
|---|---|---|---|---|---|
| Video 1 | Flame1 | 402 | Fire | 64,049 | |
| Video 2 | Flame2 | 411 | Fire | ||
| Video 3 | Flame3 | 613 | Fire | ||
| Video 4 | Flame4 | 373 | Fire | ||
| Video 5 | Flame5 | 748 | Fire | ||
| Video 6 | indoor_night_20m_heptane_CCD_001 | 1,658 | Fire | ||
| Video 7 | indoor_night_20m_heptane_CCD_002 | 3,846 | Fire | ||
| Video 8 | outdoor_daytime_10m_gasoline_CCD_001 | 3,491 | Fire | ||
| Video 9 | outdoor_daytime_10m_heptane_CCD_001 | 4,548 | Fire | ||
| Video 10 | outdoor_daytime_20m_gasoline_CCD_001 | 3,924 | Fire | ||
| Video 11 | outdoor_daytime_20m_heptane_CCD_001 | 4,430 | Fire | ||
| Video 12 | outdoor_daytime_30m_gasoline_CCD_001 | 6,981 | Fire | ||
| Video 13 | outdoor_daytime_30m_heptane_CCD_001 | 3,754 | Fire | ||
| Video 14 | outdoor_night_10m_gasoline_CCD_001 | 1,208 | Fire | ||
| Video 15 | outdoor_night_10m_gasoline_CCD_002 | 1,298 | Fire | ||
| Video 16 | outdoor_night_10m_heptane_CCD_001 | 3,275 | Fire | ||
| Video 17 | outdoor_night_10m_heptane_CCD_002 | 776 | Fire | ||
| Video 18 | outdoor_night_20m_gasoline_CCD_001 | 5,055 | Fire | ||
| Video 19 | outdoor_night_20m_heptane_CCD_001 | 4,141 | Fire | ||
| Video 20 | outdoor_night_20m_heptane_CCD_002 | 1,645 | Fire | ||
| Video 21 | outdoor_night_30m_gasoline_CCD_001 | 6,977 | Fire | ||
| Video 22 | outdoor_night_30m_heptane_CCD_001 | 4,495 | Fire | ||
| Video 23 | smoke_or_flame_like_object_1 | 171 | Normal | 25,511 | |
| Video 24 | smoke_or_flame_like_object_2 | 530 | Normal | ||
| Video 25 | smoke_or_flame_like_object_3 | 862 | Normal | ||
| Video 26 | smoke_or_flame_like_object_4 | 904 | Normal | ||
| Video 27 | smoke_or_flame_like_object_5 | 8,229 | Normal | ||
| Video 28 | smoke_or_flame_like_object_6 | 7,317 | Normal | ||
| Video 29 | smoke_or_flame_like_object_7 | 2,012 | Normal | ||
| Video 30 | smoke_or_flame_like_object_8 | 8,49 | Normal | ||
| Video 31 | smoke_or_flame_like_object_9 | 2,807 | Normal | ||
| Video 32 | smoke_or_flame_like_object_10 | 1,830 | Normal | ||
| Total Frames | 89,560 | ||||
Table 3.
Classification results of different experiments.
| Model | Fine Tuning | Accuracy (%) |
FPR (%) |
FNR (%) |
Training Time (s) | Prediction Time (s) | ||
|---|---|---|---|---|---|---|---|---|
| No | Yes | |||||||
| CNN Pre-Trained Models | AlexNet | ✓ | 78.31 | 41.18 | 14.29 | 78.9 | 1.19 | |
| ✓ | 86.04 | 13.58 | 7.14 | 114.3 | 1.63 | |||
| InceptionV3 | ✓ | 83.87 | 29.33 | 10.65 | 69.8 | 0.83 | ||
| ✓ | 87.56 | 7.22 | 2.13 | 93.4 | 0.94 | |||
| SqueezeNet | ✓ | 74.39 | 14.67 | 7.80 | 63.5 | 0.98 | ||
| ✓ | 84.77 | 9.41 | 5.50 | 87.4 | 1.23 | |||
| Fused | ✓ | 89.47 | 11.76 | 9.74 | 397.2 | 0.78 | ||
| ✓ | 90.35 | 5.88 | 1.50 | 247.9 | 0.63 | |||
| Proposed | Without IS | ✓ | 91.62 | 3.38 | 2.94 | 54.7 | 0.32 | |
| ✓ | 93.84 | 1.82 | 1.43 | 73.5 | 0.18 | |||
| With IS | ✓ | 92.40 | 0.65 | 0.84 | 84.3 | 0.12 | ||
| ✓ | 95.25 | 0.09 | 0.65 | 100.8 | 0.08 | |||
Table 4.
Experimental results along with comparison to the previous techniques.
| Technique | FPR (%) | FNR (%) | Accuracy (%) |
|---|---|---|---|
| Rafiee [47] | 17.65 | 07.14 | 87.10 |
| Habiboğlu [48] | 5.88 | 14.29 | 90.32 |
| Chen [49] | 11.76 | 14.29 | 87.10 |
| Bellavista [46] | 9.07 | 02.13 | 94.39 |
| Foggia [50] | 11.76 | - | 93.55 |
| Muhammad [30] | 8.87 | 02.12 | 94.50 |
| Proposed | 0.09 | 00.65 | 95.25 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



MDPI Initiatives
Important Links
© 2024 MDPI (Basel, Switzerland) unless otherwise stated