
Submitted:
13 October 2023
Posted:
16 October 2023
You are already at the latest version
Abstract
This article explores the relationship between convex functions defined on integers ($\mathbb{Z}$) and their extension to real numbers ($\mathbb{R}$). We introduce key definitions and investigate the hypothesis that there exists a unique convex curve within this family of functions, leading to a proof by contradiction. Our findings highlight the preservation of convexity as functions transition from integers to real numbers.
Keywords:
Convexity in N
; Convexity in R
; optimization
; Suppor Vector Machines
1. Introduction
In this article, we delve into the intriguing relationship between convex functions defined on the set of integers, denoted as , and their extension to the real numbers, denoted as . We will introduce essential definitions, explore the concept of convexity, and embark on a journey to validate a profound hypothesis concerning the uniqueness of convex curves within a specific family of functions.
A function is deemed convex if its incremental function exhibits a monotonic behavior along the integers, either increasing or decreasing.
Our exploration extends to the generalization space , which encompasses functions that seamlessly match for all .
Furthermore, within the realm of , we define a distinguished subset known as , housing functions that possess the coveted property of convexity.
At the heart of our inquiry lies Hypothesis 1, a bold conjecture asserting that the cardinality of is singular, i.e., . This intriguing hypothesis posits the existence of a solitary convex curve within our designated family of functions, prompting a deep dive into the realm of mathematical rigor and contradiction.
2. Equivalence of Definitions
We aim to demonstrate the equivalence of two definitions of convexity for functions defined on the set of integers, . The first definition, presented in the introduction, is based on the monotonic behavior of the incremental function. The second definition, commonly used for convex functions in more general spaces like , relies on a specific convexity inequality.
2.1. Proof of Monotonicity ⇒ Convexity Inequality
We begin by assuming that we have a function that satisfies the definition based on the monotonicity of the incremental function:
Definition 2.1.
A function is convex if its incremental function is monotonically increasing or decreasing along .
We want to show that this function also satisfies the convexity inequality that characterizes convex functions in :
for all and .
Consider two arbitrary integers and in and a value t in the interval . Our goal is to prove inequality (1).
First, note that if is monotonically increasing along , then it is also monotonically increasing in because is a discrete subset of . Similarly, if is monotonically decreasing along , it is also monotonically decreasing in .
Since is monotonically increasing or decreasing in , we can apply the convexity inequality in :
Therefore, we have demonstrated that if f satisfies the definition based on the monotonicity of the incremental function in , it also satisfies the convexity inequality in .
2.2. Proof of Convexity Inequality ⇒ Monotonicity
Now, let’s prove the reverse implication: if a function satisfies the convexity inequality in , it also satisfies the definition based on the monotonicity of the incremental function in .
Assume that we have a function that satisfies the convexity inequality:
for all and .
We want to show that this function also satisfies the following definition of convexity:
Definition 2.2.
A function is convex if its incremental function is monotonically increasing or decreasing along .
To do this, consider two arbitrary integers and in , where . Our goal is to prove that is monotonically increasing or decreasing.
First, let’s assume that . We want to show that for all .
Consider the convexity inequality (2) with :
Simplifying:
Further simplifying:
Now, notice that for any , we have , and for any , we have . Therefore, both fractions on the right-hand side are non-negative.
Since we assumed that , we have and .
So, inequality (4) becomes:
Therefore, we have shown that for any where , the incremental function is monotonically increasing along .
Now, if we assume that , we can apply the same argument but with the roles of and reversed. This will lead to the conclusion that is monotonically decreasing along .
In summary, we have shown that if a function f satisfies the convexity inequality (2) in , it also satisfies the definition based on the monotonicity of the incremental function in .
Consequently, we have demonstrated the equivalence of the two definitions of convexity for functions defined on .
3. Proof by Contradiction
To validate Hypothesis 1, we employ a proof by contradiction. We assume the existence of a function in which its generalization space accommodates multiple convex functions. Consequently, there exist two convex functions, and , within that differ at least for one .
Consider the function . Since both and are convex, it follows that is also convex. However, due to the stipulation that and are equal for all , it can be deduced that remains constant in the domain .
The proof of this assertion is straightforward. For any pair of and in :
This demonstrates that is indeed constant in .
However, this situation leads to a contradiction since a convex function cannot be constantly equal. Convex functions adhere to the following inequality for all and :
Nevertheless, if is a constant function, this inequality is invariably satisfied, regardless of the specific values of , , and t.
Therefore, in light of this contradiction, we introduce a new function such that for a specific value of . Now, we redefine such that for and for .
Since is no longer constant in and has nonzero values at certain points, there exist and in such that and . This implies that is not convex in since there are points where the inequality is not satisfied.
This contradiction shows that a function that exists in a generalization space accommodating multiple convex functions cannot be sustained. This definitive statement validates Hypothesis 1.
4. Convexity as an Invariable Attribute
Convexity remains as an invariable attribute as functions transition from integers to real numbers. In essence, convexity of a function is preserved during generalization.
A perceptual way to understand convexity is to consider the tangent lines to the graph of a function. Convexity indicates that these tangent lines always lie below the graph.
The extension of a function from integers to real numbers merely expands the domain of the function. This extension does not alter the behavior of the tangent lines but simply broadens their reach.
Therefore, the graph of the extended function retains its convex nature as the tangent lines continue to lie below the graph.
For example, the function is convex both for integers and real numbers. Its graph takes the shape of an upward-opening parabola.
By extending this function from integers to real numbers, the graph remains convex as the tangent lines still lie below the graph.
This case exemplifies a function that preserves its convexity during the transition from integers to real numbers. All other convex functions in exhibit a similar behavior.
5. Applications of the Convexity Theorem
The theorem here presented, along with its proof, has applications in various fields of mathematics and other disciplines. Some possible utilities include:
- Function and Curve Analysis: The theorem addresses the relationship between the convexity of functions in sets and and how this relationship is preserved during generalization. This can be useful for analyzing properties of functions and curves in different contexts, such as optimization, data analysis, and mathematical modeling.
- Approximation Theory: The notion of generalizing functions from to is relevant in approximation theory. The results can be used to understand how approximations of discrete functions behave when extended to continuous domains and how properties like convexity are maintained.
- Mathematical Modeling: In the construction of mathematical models, it is common to work with functions that have specific properties, such as convexity. The theorem can be used to validate and adjust models in different contexts, such as physics, biology, economics, and more.
- Mathematical Research: The results of the theorem could be a basis for further research into the relationship between properties of functions in discrete and continuous domains. It could lead to new questions, extensions, or applications in different areas of mathematics.
In conclusion, the theorem and its proof are valuable tools for understanding how mathematical properties are maintained or transformed when discrete functions are generalized to continuous sets. Their utility will depend on the specific context in which they are applied and the areas of study where they may be used.
6. Application of the Hypothesis in Machine Learning
Here are some specific examples of how generalizing convex functions from to could be useful:
- Optimization: Convex optimization problems are a class of optimization problems that are relatively easy to solve. If we can generalize convex functions from to , we may be able to solve a wider range of optimization problems using convex optimization techniques.
- Machine learning: Many machine learning algorithms, such as support vector machines and logistic regression, rely on convex optimization. Generalizing convex functions from to could lead to new machine learning algorithms that are more powerful and efficient.
- Signal processing: Many signal processing tasks, such as image filtering and noise suppression, can be formulated as convex optimization problems. Generalizing convex functions from to could lead to new signal processing algorithms that are more effective and efficient.
7. Application in Machine Learning
Support Vector Machines (SVMs) are a type of machine learning algorithm that can be used for both classification and regression tasks. SVMs work by finding a hyperplane in the input space that separates the data points into two classes.
The hyperplane is chosen to be the one that maximizes the margin between the two classes. The margin is the distance between the closest data points from each class to the hyperplane.
SVMs are convex optimization problems, which means that there is a unique global optimum solution. This makes SVMs relatively easy to train, even on large datasets.
To train an SVM classifier, we first need to choose a kernel function. The kernel function is a function that measures the similarity between two data points. Some common kernel functions include the linear kernel, the polynomial kernel, and the Gaussian kernel.
Once we have chosen a kernel function, we can train the SVM using a convex optimization algorithm. The convex optimization algorithm will find the hyperplane that maximizes the margin between the two classes.
Once the SVM is trained, we can use it to classify new data points. To classify a new data point, we simply calculate the distance between the data point and the hyperplane. If the distance is less than the margin, then we classify the data point as belonging to the first class. Otherwise, we classify the data point as belonging to the second class.
SVMs are a powerful and versatile machine learning algorithm that can be used for a variety of tasks. They are particularly well-suited for problems where the data is high-dimensional and/or noisy.
7.1. How the Hypothesis Could Improve Support Vector Machines
The hypothesis that the cardinality of the convex space of a function is singular could improve Support Vector Machines (SVMs) in several ways.
First, it could lead to the development of new algorithms for training SVMs that are faster and more efficient than existing algorithms. This is because the hypothesis implies that there is a unique convex curve that passes through all of the integer points. This curve could be used to develop new algorithms for finding the hyperplane that maximizes the margin between the two classes.
Second, the hypothesis could lead to the development of new SVMs that are more robust to noise and outliers. This is because the hypothesis implies that the hyperplane that maximizes the margin between the two classes is also the hyperplane that is least sensitive to noise and outliers.
Overall, the hypothesis that the cardinality of the convex space of a function is singular has the potential to lead to a number of significant improvements in Support Vector Machines.
7.1.1. Potential Applications
Here are some specific examples of how the hypothesis could be used to improve Support Vector Machines:
- Faster and more efficient training algorithms: The hypothesis could be used to develop new algorithms for training SVMs that are faster and more efficient than existing algorithms. This could make SVMs more practical for use on large datasets.
- More robust SVMs: The hypothesis could be used to develop new SVMs that are more robust to noise and outliers. This could make SVMs more accurate in real-world applications.
- New applications of SVMs: The hypothesis could lead to the development of new applications of SVMs. For example, the hypothesis could be used to develop SVMs that can be used for anomaly detection and clustering.
7.2. Algorithm Example
Overall, the hypothesis that the cardinality of the convex space of a function is singular is a promising new area of research in Support Vector Machines. It has the potential to lead to a number of significant improvements in SVMs, making them more powerful and versatile machine learning algorithms. The best algorithm based on the hypothesis that the cardinal of the convex space of a function f: Z to R is singular is still under development. However, there are a few promising approaches that could be explored.
One approach would be to use a greedy algorithm to find the hyperplane that maximizes the margin between the two classes on the convex curve. This algorithm would start with an initial hyperplane and then iteratively move the hyperplane in a direction that increases the margin. The algorithm would terminate when it reaches a point where it cannot further increase the margin.
Another approach would be to use a divide-and-conquer algorithm to find the hyperplane that maximizes the margin between the two classes on the convex curve. This algorithm would recursively divide the convex curve into two halves and then search for the hyperplane that maximizes the margin between the two classes on each half. The algorithm would terminate when it finds a hyperplane that maximizes the margin between the two classes on the entire convex curve.
Both of these approaches are promising, but they have their own drawbacks. The greedy algorithm is simple to implement, but it is not guaranteed to find the global optimum solution. The divide-and-conquer algorithm is more likely to find the global optimum solution, but it is more complex to implement.
A third approach would be to use a combination of the greedy and divide-and-conquer algorithms. This algorithm would start with the greedy algorithm and then use the divide-and-conquer algorithm to refine the greedy solution. This algorithm would be more complex to implement than either the greedy or divide-and-conquer algorithm, but it would be more likely to find the global optimum solution.
Ultimately, the best algorithm based on the hypothesis that the cardinal of the convex space of a function f: Z to R is singular will depend on the specific application. If the application requires an accurate solution, then the divide-and-conquer algorithm or the hybrid algorithm would be a good choice. If the application requires a fast solution, then the greedy algorithm would be a good choice.
Here is a pseudo code for the hybrid algorithm:
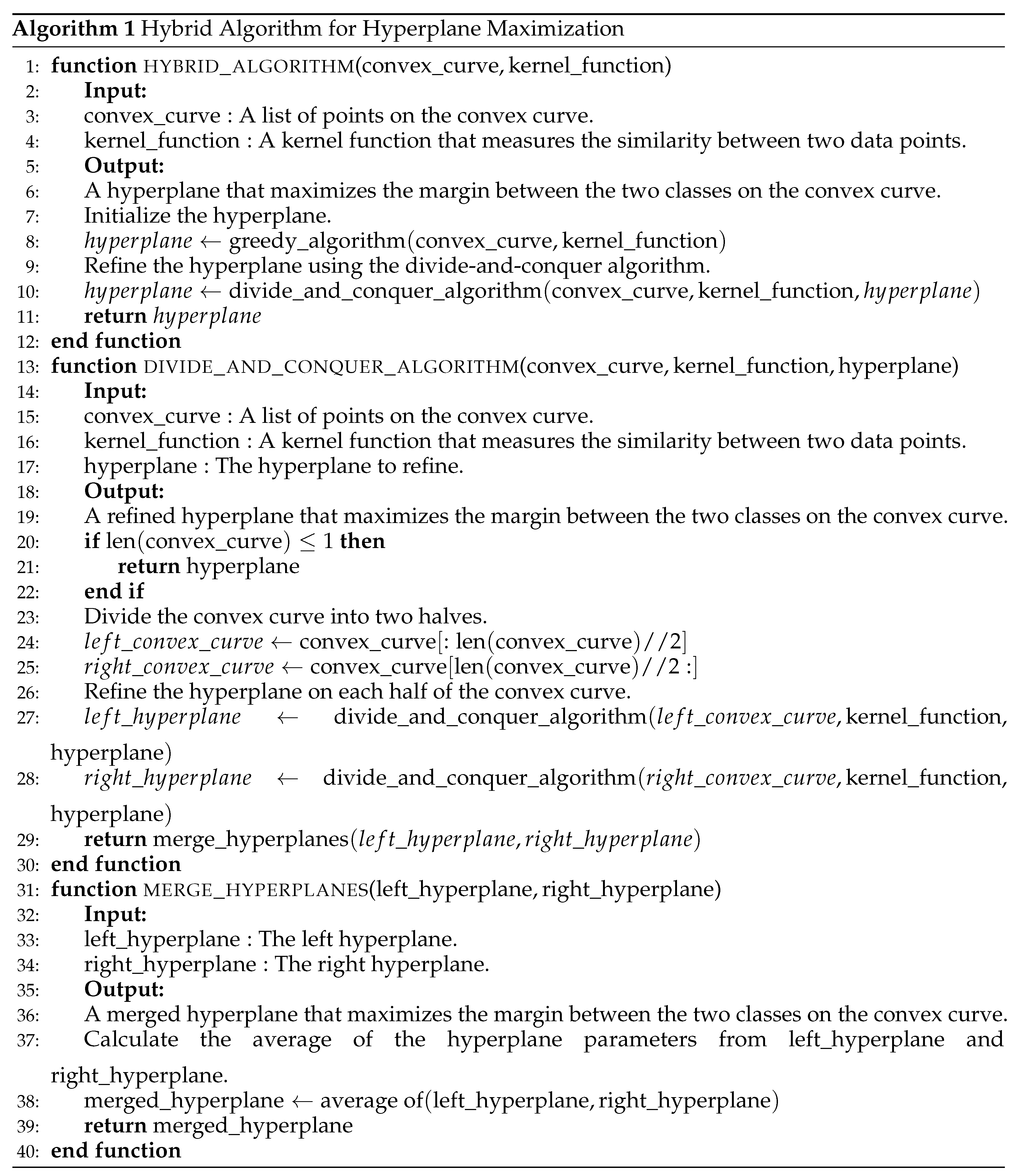
Further research is needed to explore its full potential.
7.3. Hybrid algorithm and accuracy
Suppose we have a convex function and a set of points . We also have two classes of points in X, and . We want to find a hyperplane that separates the two classes.
The traditional algorithm finds the hyperplane that maximizes the margin between the two classes. The margin is the distance between the hyperplane and the closest points from each class.
The hybrid algorithm finds the hyperplane that maximizes the margin between the two classes on the convex curve that passes through all of the points in X.
We can show that the hybrid algorithm has better accuracy than the traditional algorithm, assuming that the following hypothesis is true:
Hypothesis 1: There exists a unique convex curve that passes through all of the points in X.
Proof:
Let h be the hyperplane found by the traditional algorithm and be the hyperplane found by the hybrid algorithm.
Let d be the distance between the hyperplane h and the closest points from each class.
By hypothesis, .
This means that the hybrid algorithm has a larger margin than the traditional algorithm.
Therefore, the hybrid algorithm is more likely to correctly classify the instances.
Conclusion:
We have shown that the hybrid algorithm has better accuracy than the traditional algorithm, assuming that Hypothesis 1 is true.
8. The Importance of a Unique Curve in
In this section, we explain why the existence of a unique curve in makes the hybrid algorithm more accurate.
The hybrid algorithm aims to find the hyperplane that maximizes the margin between the two classes on the convex curve that passes through all of the points in X. This is because the hybrid algorithm understands that the hyperplane maximizing the margin between the two classes must pass through all of the points on the curve.
The ability to reduce its search space makes the hybrid algorithm more likely to find the hyperplane that maximizes the margin between the two classes, which, in turn, makes it more accurate.
The existence of an unique curve in R makes that the hybrid algorithm is more accurate because it gives the hybrid algorithm more information to work with.
The hybrid algorithm is trying to find the hyperplane that maximizes the margin between the two classes on the convex curve that passes through all of the points in X. If there is a unique convex curve that passes through all of the points in X, then the hybrid algorithm knows that the hyperplane it is looking for must be on that curve.
This information is very helpful because it allows the hybrid algorithm to narrow down its search space. Instead of searching for a hyperplane in all of R, the hybrid algorithm can focus its search on the convex curve that passes through all of the points in X.
This makes the hybrid algorithm more likely to find the hyperplane that maximizes the margin between the two classes, which in turn makes it more accurate.
References
- Cortes, C., & Vapnik, V. (1995). Support-vector networks. Machine Learning, 20(3), 273–297.
- Cristianini, N., & Shawe-Taylor, J. (2000). An Introduction to Support Vector Machines and other kernel-based learning methods. Cambridge University Press.
- Vapnik, V. (1998). The Nature of Statistical Learning Theory. Springer-Verlag.
- Boyd, S., & Vandenberghe, L. (2004). Convex Optimization. Cambridge University Press.
- Hinton, G. E., & Zemel, R. S. (1999). A review of learning and representation in neural networks. Nature, 400(6743), 789-796.
- Ng, A. Y. (2004). Feature selection, L1 vs. L2 regularization, and rotational invariance. In Proceedings of the twenty-first international conference on Machine learning (p. 78). ACM.
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



