
Submitted:
16 October 2023
Posted:
17 October 2023
You are already at the latest version
Abstract
Drone imagery has the potential to enrich urban planning and preservation, especially where it converges with the growing creation and use of 3D models. The authors have conducted a systematic literature review of articles published between 2002 and 2022, drawing from reputable academic repositories including Science Direct, Web of Science, and China National Knowledge Infrastructure (CNKI), to identify current gaps in existing research in the application of UAVs to the creation of 3D models in urban planning and preservation. Findings indicate five research shortcomings: limited participation of planning experts, research focus imbalance, lack of usage for special scenarios, lack of integration with smart city planning, and limited interdisciplinary collaboration. The study also acknowledges current limitations with UAV applications and discusses possible countermeasures as well as future prospects.
Keywords:
drone
; UAV
; unmanned aerial vehicle
; 3D
; three-dimensional
; digital twin
; photogrammetry
; BIM
; urban planning
; regional planning
; preservation
; heritage conservation
1. Introduction
Urban planning and historic preservation involve the process of systematically collecting and using spatial data to manage change in the built environment. These fields are generally supported with imagery and data gathered through aerial-based remote sensing technologies such as satellites and airplanes. These technologies provide planning practitioners and researchers with evidence-based information to help understand the built environment [1,2]. The use of unmanned aerial vehicles (UAVs), commonly referred to as drones, is a rapidly advancing technology. UAVs have become more accessible for urban planning and preservation due to their lower cost of acquisition and easier entry requirements for new pilots, especially when compared to airborne and satellite platforms [3]. UAVs are extensively utilized for purposes such as aerial photography, surveying, and mapping; agricultural tasks, search and rescue operations, and military applications; as well as news reporting, film, and television production [4,5,6,7]. Today, UAVs can carry out a variety of tasks upon need, with a set of ever-advanced features of aerial photography, surveying, mapping, and LiDAR scanning. Their use as tools for improving the sensing of landscapes and the built environment suggests their potential significance for research and professional practice in urban planning, historic preservation, and allied fields.
In terms of technical characteristics, UAV technology has the advantages of small volume, low altitude, slow flight speed, lightweight, and wide shooting range [8,9]. UAV technology gradually transitioned from development experiments to practical applications in examples around the world [10,11]. UAV technology also enables users to rapidly acquire spatial information about various aspects of the environment, including land, built structures, and natural resources [9,12]. UAV technology has been applied in three-dimensional scene reconstruction [13], forest modeling [14], historical and cultural survey and protection [15], in addition, UAVs are used to capture high-resolution 2D datasets at a range of scales to generate 3D models using the process of "Structure-from-Motion" (SfM) [16].
Urban and regional planning faces challenges of understanding and responding to rapid change in the urban environment. Therefore, having access to high-quality and up-to-date spatial information can greatly assist in managing these city changes. Planners aid public officials in exploring multiple future scenarios with high-quality visualizations. Professionals in preservation, similarly must help stakeholders to understand building conditions and survey entire districts for cultural resources. Google Street View and satellite imagery are available tools, but they have important limitations, as planners are limited to available images that may not be up-to-date [17,18]. UAVs have demonstrated their suitability for rapid urban modeling and aerial support so that both researchers and practitioners can produce up-to-date imagery using UAVs that are specific to particular needs and high resolution [19]. Among recent studies, planners have used UAV aerial survey technology for rapid urban modeling and to obtain information in planning surveys and some studies have verified that UAV surveying can produce higher resolution images that cater to specific needs. Researchers have integrated UAVs into areas closely associated with urban planning and historic preservation, and evaluate the current challenges associated with the utilization of UAV technology in planning practice, in light of the growing use of UAVs in a variety of contexts [20]. The authors identified opportunities to enhance 3D modeling and visualization for scenario planning, and in public discussion about alternatives.
3D modeling is a well-established concept primarily used for visualizing physical objects and structures. In contrast, digital twins, a more dynamic concept, expand upon 3D modeling by incorporating real-time data and connectivity to physical systems [21]. Both 3D modeling and digital twins are valuable academic tools, catering to various disciplines with different objectives. With the increasing interest in the production of 3D modeling and the creation and maintenance of digital twins for urban planning and historic preservation, researchers have started to explore the use of UAVs to augment these models. While the manual cost and time that it takes to generate and render 3D models for urban planning can be severe, UAVs have the advantages of low initial cost and time required for data acquisition [22]. The use of UAV aerial photography in urban planning mostly remains at the image collection stage, with limited image analysis and data measurement. Integration with existing tools and methods used by planners and preservation professionals is still uncertain, although the adoption of machine learning techniques in planning may take image analysis more common in the future. UAV technology has not been fully integrated into 3D modeling processes or the practical application stage of Geographic Information Systems (GIS). Further development is necessary to enhance its potential for creating three-dimensional models. The enhancement in the creation and maintenance of digital twins is crucial for urban planning and improvements to planning support systems. We hypothesize that combining UAVs with 3D modeling can aid in integrating and analyzing information about the built environment. In recent years, rapid modeling through UAV aerial photography technology and GIS, Pix4Dmapper (Pix4D SA, Lausanne, Switzerland), Smart3D (Bentley Systems, Inc., Exton, PA, USA), PhotoScan (Agisoft LLC, St. Petersburg, Russia), and other software has begun to appear in urban planning [23]. Hence, this suggests a tendency towards the expanded application of UAVs in the field of urban planning.
The rationale behind the breadth of our study is to offer readers a panoramic view of the evolving landscape of UAV technology’s integration into urban planning and preservation practices. This inclusive approach allows us to provide insights into the myriad applications, challenges, and emerging trends that researchers, practitioners, and policymakers encounter. By casting a wide net, we aim to create a comprehensive reference for readers to gain a holistic understanding of the subject matter.
The guiding questions for this paper are: 1. How can UAV technology be effectively applied as a 3D modeling tool in urban planning and preservation? 2. What are the existing research gaps within the published articles? 3. What limitations significantly impacted the implementation of UAVs?
The subsequent sections of this paper offer a comprehensive overview of the research methodology utilized, including details on the systematic literature review, materials and methods employed, and the incorporation of bibliometric analysis. Moreover, this paper explores specific case studies that showcase practical applications of UAVs in planning and preservation contexts, providing valuable insights into their deployment and efficacy in supporting various aspects of these fields. Additionally, the analysis delves into the opportunities and barriers associated with leveraging drone technology to facilitate the creation and utilization of digital twins, shedding light on the potential benefits and challenges of integrating UAVs into planning and preservation practices. By addressing these aspects, this paper aims to provide a comprehensive understanding of the current state, limitations, and opportunities surrounding UAV technology in the context of urban planning and preservation.
2. Materials and Methods
In this paper, the authors conducted a systematic literature review to investigate the application of the UAV 3D model for urban planning and potential issues. The relevant literature of the past two decades was analyzed through a systematic review. The selection of papers was based on the Preferred Reporting Items for Systematic Reviews and Meta-Analyses (PRISMA) guidelines [24].
2.1. Eligibility Criteria
The selection of papers was based on specific inclusion criteria, which are as follows: studies published between 2002 and 2022; studies addressing the use of UAVs and 3D modeling in urban planning-related fields; research articles and review articles as well as technical notes. Given dual language proficiency, the authors decided to be more inclusive by including English and Chinese language articles in the search.
To ensure a high level of quality in the study, certain exclusion criteria were applied, including articles discussing the application of UAVs in fields unrelated to planning; articles published before 2002; book chapters, letters to editors, and conceptual papers. Additionally, it is important to highlight that the manual screening process, wherein articles were rigorously assessed based on their titles and abstracts, resulted in the exclusion of a considerable number of studies. The predominant reason for exclusion was a discernible misalignment with the central theme of our research. A substantial portion of these excluded articles demonstrated a technical orientation or were focused on non-planning topics, encompassing subjects like path planning, motion planning, machine learning, as well as inspection and monitoring, among other non-relevant areas. This stringent screening procedure ensured that our analysis encompassed only studies closely aligned with the core objectives of our research.
2.2. Information Sources
The research was conducted using four online search databases: Science Direct, Web of Science, and China National Knowledge Infrastructure (CNKI). The filter options available on these databases were utilized to identify relevant papers in accordance with the eligibility criteria outlined previously.
2.3. Search
The search was carried out using specific keywords (“UAV” OR “Unmanned Aerial Vehicle” OR “Drone”) AND (“3D” OR “Three Dimensional” OR “Digital Twin”) AND (“Urban Planning” OR “Regional Planning” OR “Preservation”) to ensure a thorough and systematic coverage of the literature. Digital twins and 3D modeling both involve the representation of physical objects in a three-dimensional format and incorporate visual and geospatial information. However, digital twins go beyond static 3D models by including dynamic, real-time data about the physical object or environment. In contrast, 3D models are primarily used for visualization and design purposes, and they are generally static representations. Hence, the authors decided to incorporate digital twins into the study.
After obtaining the search results, duplicates were removed by exporting the data to Zotero, and an initial screening of titles and abstracts was followed to extract relevant studies.
Figure 1 presents a visual representation of author keywords that appeared at least five times in relation to UAVs, 3D modeling, and urban planning. The VOS viewer software was used to generate the visualization, which shows how the keywords are clustered based on their theme. The identified clusters include UAV, photogrammetry, and point cloud; path planning, optimization and urban environments; and artificial intelligence, sustainability, and smart city.
The visualization graph generated by VOSviewer contains color-coded clusters that highlight patterns and trends in planning and preservation, offering valuable insights for future research. That graph reveals distinct patterns of co-occurring author keywords in titles and abstracts (Figure 1). The graph depicts various groups of research subjects and journals using different colors, offering a visual representation of the links between urban planning, UAV technology, and 3D modeling.
Figure 2 depicts the keywords that surfaced most frequently during our search. While the diagram and accompanying table reveal the presence of published papers within specific clusters (e.g. with keywords such as remote sensing, photogrammetry, architecture, visual reality, etc.), it is noteworthy that a significant portion of the articles identified through keyword searches predominantly emphasize technical aspects, including machine learning, deep learning, artificial intelligence, path planning, and the Internet of Things, rather than being centered on urban planning or preservation themes. Notably, the keywords "remote sensing" and "cultural heritage" emerge as frequently associated with planning and preservation. This observation suggests that the existing body of research in this domain may be relatively limited in terms of studies closely aligned with urban planning and historic preservation. Furthermore, the existing literature predominantly focuses on cultural heritage as a key area of interest.
Hence, this study offers valuable insights into the relationships between different fields of research, identifies trends, and highlights potential growth areas by analyzing bibliometric data and visualizing the results. It serves as a useful resource for planning researchers and can inform future research endeavors.
2.4. Study Limitations
This systematic literature review, while comprehensive, is not without its limitations. The broad scope of our study, which encompassed research articles published between 2002 and 2022 in both English and Chinese languages, was a deliberate choice to capture the full spectrum of research activities in the domain of UAV 3D modeling and urban planning. This approach allowed us to provide a comprehensive overview of the field, offering insights into the range of applications, challenges, and emerging trends. We recognize that a narrower or more focused scope might yield different and possibly more specific results. A more narrowly defined study could delve deeply into a specific aspect of UAV 3D modeling or concentrate on a particular subfield of urban planning. Conversely, a broader scope could include a wider array of applications and interdisciplinary studies, especially our subject urban planning, which covers a wide range of areas.
The vast body of literature on UAV 3D modeling and urban planning can be categorized into several sub-categories, such as UAV photogrammetry, point cloud analysis, urban simulation, and smart city applications, among others. Future research endeavors could explore these sub-categories individually, conducting more focused systematic reviews to unearth deeper insights within each domain. Such studies might delve into the specific challenges and opportunities inherent to each sub-category and guide researchers, practitioners, and policymakers more effectively.
In conclusion, the broad scope of this study was chosen to showcase the wide range of research activities and applications in the intersection of UAV 3D modeling and urban planning. While it may introduce some diversity into the study results, we believe it offers a comprehensive view of the evolving landscape in this field. The limitations are acknowledged, and we recommend that future research should consider delving into the sub-categories identified within this broader domain to provide more targeted insights and solutions.
2.5. Study Selection
Initially, 1186 articles were identified and assessed based on their title and abstract. A substantial portion of these excluded articles demonstrated a technical orientation or focused on non-planning topics. Hence, 1114 articles were not related to UAV for planning, they were deemed irrelevant to our research and therefore excluded. The remaining 72 articles underwent full-text screening, and 49 of them did not meet the eligibility criteria, leaving 23 articles to be included in an in-depth literature review. Figure 3 illustrates the selection process in compliance with the PRISMA guidelines.
2.6. Analytical Framework
This study analyzed a subsection of research papers to address our guiding research questions related to the usage of UAVs related to planning and preservation and the potential for 3D modeling and drone technology as an enhancement to research and practice in those fields. The study also analyzed the potential barriers and limitations that hinder the widespread use of UAV technology and suggested possible solutions to overcome these obstacles, to encourage further research in this field.
3. Recent Studies of UAVs in Planning
The use of 3D modeling has been prevalent in various fields, presently, there is an expanding trend of utilizing 3D modeling technology for preservation of historical sites [25,26,27,28]. However, the terms "drone", "UAVs", and "unmanned aerial vehicles" were not discovered during a search for articles published in the Journal of the American Planning Association since the year 2000, a flagship journal within the field of planning. This highlights the limited scope of published scholarship in this specific area.
Moreover, a broader search of journals reveals that the use of UAVs in urban planning, particularly in relation to 3D modeling is relatively restricted. However, an analysis of recent literature output indicates a notable increase in UAV publications since 2015. It is worth noting that the Journal of Planning Education and Research issued a special call for urban digital twin papers in 2023. Although the call does not explicitly mention UAVs or drone technology, it brings attention to the prominence of 3D modeling technology in a journal that typically focuses less on the technical aspects of representing the built environment.
At present, it remains uncertain whether the call will generate examples showcasing the use of UAVs to enhance 3D models. However, it is possible that detailed, accurate, and honest representations of existing buildings could have ethical implications for the development of 3D models. Some researchers have pointed to the misrepresentation of buildings in the creation of digital 3D representations [29]. Drone photogrammetry might be a way to better represent cities as they are actually built.
3.1. Overview of UAV usage in planning
The growing body of publications suggests that UAVs have gained increasing attention among researchers, showing that UAVs have been applied to more fields as an emerging remote sensing technology [30,31,32,33]. UAVs can be seen in publications related to transportation planning, historic preservation, land use planning, park activity monitoring, and sustainability planning [34,35]. For example, Bhatnagar et al. [36] present a new technique for mapping wetlands using drone imagery and satellite imagery, with the aim of reducing the need for costly and time-consuming field surveys. The authors captured a small number of drone images and used them to train a classifier that was then applied to satellite imagery. In another study, Donaire et al. [37] explained how drones or UAVs can take zenith images without visitors’ direct participation while still offering highly accurate spatial information. The article outlines the methodology for utilizing drone imagery to perform a quantitative analysis of tourist behavior and travel routes in an urban setting. This illustrated how drone images can be used to gain insights into travel patterns and crowd behavior, helping urban planners make better decisions to improve visitor experiences.
Despite the diversity of UAV research in the above fields, the use of UAVs for 3D modeling in urban planning has been largely overlooked. Our literature review revealed that there is a scarcity of research papers that solely investigate the use of unmanned aerial vehicles (UAVs) for creating three-dimensional models and extracting practical information to aid urban planners in their decision-making processes. As a result, this paper aims to bridge this gap by conducting a comprehensive review of the topic and laying a foundation for future research on the application of UAVs in urban planning. Table 1 provides an overview of the existing planning literature on the use of UAVs in 3D modeling, highlighting the technologies used and future opportunities for research.
3.2. Main application analysis
One important application of UAV photogrammetry is damage assessment and reconstruction of cities [58]. Building destruction is a common byproduct of war and natural disasters. It is very often the case that the original drawings and pictures that directly reflect the original appearance of the buildings cannot be found. Therefore, researchers can only use other materials to compare and restore them step by step. Therefore, UAVs can be applied to a city’s post-war reconstruction: photogrammetry allows researchers to create highly accurate models of ancient buildings and antiquities, and 3D models provide comprehensive digital data for infrastructure repair. Remarkably, despite the evident potential of UAVs in this domain, there is a surprising lack of scholarly articles specifically addressing this application. Further research and exploration in this area could significantly enhance our understanding and utilization of UAV photogrammetry for urban reconstruction endeavors.
Several challenges have been encountered in using photogrammetry to preserve cultural heritage. Many ancient and older heritage buildings have often undergone significant structural and appearance changes due to weathering and may be fragile, making surveying difficult. In addition, recording details such as carvings and colors require close-up observations, which can be challenging. The remote and complex locations of many ancient buildings also pose difficulties in manually setting up surveying equipment. Direct contact with fragile historic sites and ancient buildings can cause irreversible damage. UAVs provide a safe, non-contact solution for surveying and mapping, revolutionizing the digitalization of cultural heritage protection. The use of UAVs not only has the potential to enhance 3D documentation for the preservation of cultural resources but could translate into new modes of historical interpretation through enhancements to virtual reality and augmented reality.
3.3. Common themes
There are studies that focus on using UAVs to map and model cultural heritage objects, urban spaces, and disaster sites with the goal of preserving, managing, and reconstructing historical sites in the future. While some studies discuss the advantages of oblique photogrammetry over vertical photogrammetry in achieving higher accuracy in mapping, other articles emphasize the necessity of developing systems that incorporate advanced technologies such as 360° cameras and LiDAR technology in order to generate precise representations of real-world environments [59].
Among the articles that have been reviewed, many of them have common themes, for example, Li, 2018 [39] demonstrated the application of UAV photogrammetry in urban and regional planning, while Erenoglu et al., 2018 [42] studied the use of UAV technology for 3D modeling in relation to urban planning. Zhang et al, 2022 [43] presented a drone system empowered with artificial intelligence for real-time 3D reconstruction. Kikuchi et al. [21] created a method for visualizing urban 3D models through an outdoor augmented reality digital twin approach, which has low latency between the controller and the augmented reality digital twin device. Within the historic preservation category, Kikuchi et al., 2022 [21], Tariq et al., 2017 [40], and Berrett et al., 2021 [41] focus on creating 3D models of historical sites using UAV photogrammetry and other technologies. Karachaliou et al., 2019 [38] developed an HBIM model of a museum using UAV photogrammetry, while Tariq et al., 2017 [40] used UAV photogrammetry to produce 3D models of archeological sites in Pakistan. Berrett et al., 2021 [41] developed a hyper-realistic 3D model of a university campus in the USA using UAV techniques and other technologies. Li, 2018 [39] and Erenoglu et al., 2018 [42] aimed to investigate the accuracy of UAV-based 3D modeling in urban planning, while Zhang et al, 2021 [43] focused on developing a real-time 3D reconstruction system using UAV technology. Kikuchi et al., 2022 [21] developed an outdoor augmented reality digital twin approach for public participation in urban design decision-making processes.
Several studies have demonstrated the potential of UAV photogrammetry in creating realistic 3D models of historical buildings, with Tariq et al. 2017 [40] using photogrammetry to develop accurate 3D models of archaeological sites in Pakistan, and Karachaliou et al., 2019 [38] using UAV photogrammetry to create an HBIM model of the Averof’s Museum of Neohellenic Art in Greece. Erenoglu et al., 2018 [42] further investigated the accuracy of UAV-based 3D modeling and found it to be reliable and adaptable to different 3D modeling applications.
To aid in disaster response, some studies explore the use of UAVs, such as Ferworn et al., 2011 [47] who suggest the use of readily available hardware to develop a system that can capture aerial data of disaster sites and create 3D models, which can enhance the effectiveness of existing disaster response techniques and guidelines. Soulakellis et al., 2020 [60] examined and proved the feasibility of using drone-based Structure from Motion (SfM) method to aid in post-earthquake recovery. Similarly, Zhang et al., 2022 [43] presented their development of an artificial intelligence-empowered drone system that achieves real-time 3D reconstruction, which could be used for practical applications for data analysis and decision-making.
Studies have shown UAVs have the potential to combine with other technologies, Campbell, 2018 [44] demonstrated the use of drones, photogrammetry, and virtual reality (VR) in documenting and preserving cultural artifacts at the Lelu ruins in Micronesia. Additionally, an UAV system powered by artificial intelligence has been created, with the ability to perform real-time 3D reconstruction of urban cities using a combination of depth fusion and visual-inertial odometry, this also allows for improved 3D model quality and interactive navigation guidance [43].
3.4. Common method and model
The utilization of UAVs in urban planning and protection involves various methods, technologies, and models for image processing and modeling analysis. These methods contribute to the effectiveness and efficiency of UAV-based data collection and analysis.
Several key studies highlight the innovations in this field, for instance, one study presents a multi-UAV coverage path planning method for 3D reconstruction of post-disaster damaged buildings[61]. The methodology involves generating camera location points surrounding targeted damaged buildings, filtering and sorting these points, and optimizing routes to balance flight distance and time. The proposed method outperforms conventional overhead flight with the nadir-looking method, resulting in higher-quality 3D models. The study highlights the importance of UAVs and their role in capturing high-resolution images and detailed information for assessing damage situations in specific areas.
The integration of OpenStreetMap (OSM) data with the Advanced Land Observing Satellite-2 World 3D-30m (AW3D-30) digital surface model (DSM) also demonstrates the substantial potential for scientific research, particularly due to the increasing size of OSM data and the global coverage of AW3D-30 [62]. The study emphasizes the need for a global completeness assessment of OSM data to enhance its utility, while also acknowledging concerns about data quality, as OSM data is primarily contributed by non-professionals. Nonetheless, OSM remains a valuable source of 2D building data, especially in regions where authorized building data is not freely available.
In terms of data extraction and surface reconstruction, Pix4Dmapper software is commonly used for transforming UAV-collected images into various outputs, such as 3D point clouds, orthomosaics, and DSMs[45]. The software employs computer vision and photogrammetry techniques to process geotagged images and generate dense point clouds, 3D meshes, and textured models. Additionally, Blender, an open-source 3D render software, can be used to enhance the photorealism of 3D models generated by Pix4Dmapper. Blender enables texture mapping, lighting adjustments, denoising filters, and other rendering enhancements to produce high-quality visualizations.
Another study proposed a city-digital-twin approach for future landscape visualization using AR and drones. The method involved rendering AR with occlusion handling using a detailed city 3D model on a server PC using software such as Unity and Metashape, and integrating it with an AR device to generate both first-person and overhead views[21]. A segmentation metric called "IoU" was used in the study to evaluate the occlusion handling accuracy. The method enabled free AR viewpoints and multiple stakeholder participation in urban design projects.
These examples demonstrate the ongoing technological innovation in image processing and modeling analysis for UAV-based urban planning and protection. The integration of OSM data with AW3D-30 DSM, multi-UAV coverage path planning methods, and advanced software tools like Pix4Dmapper and Blender showcase the evolving capabilities and quantitative effects of UAV image processing and modeling. These advancements contribute to the generation of accurate and detailed spatial information, facilitating informed decision-making and planning in urban environments.
3.5. Critical challenges and notable gaps in the literature
Despite the progress made in UAV 3D modeling for planning and preservation, our comprehensive review of the literature has revealed five critical challenges and notable gaps that currently exist within the field. These findings indicate areas where further research and development are needed to fully realize the potential of UAV-based 3D modeling in urban and regional planning.
Firstly, there is insufficient participation of planning experts. One significant observation from our review is that a considerable number of articles focusing on the applications of UAV 3D modeling in planning-related fields were authored by scholars from disciplines other than urban and regional planning. This highlights a gap in the active engagement of urban planning professionals and researchers in the development and advancement of UAV-based 3D modeling techniques. The involvement of urban and regional planning experts is crucial to ensure that UAV 3D modeling aligns with the specific needs, goals, and challenges faced by urban areas. Urban planners possess valuable insights into the complexities of urban environments, including land use zoning regulations, infrastructure development, transportation systems, and community engagement. Their involvement in the research process can provide a more nuanced understanding of the urban planning context and contribute to the development of UAV-based 3D modeling techniques that directly address the unique requirements of urban and regional planning.
Secondly, the authors found imbalances in the research focus. Urban planning is a systematic discipline that encompasses a wide range of subjects such as landscape, design, transportation, and the environment. Beyond the well-covered areas of historical preservation, landscape, and technical aspects, there is an evident lack of balance in research focus within the existing literature. The insufficient attention given to other crucial domains within urban planning, such as transportation, environmental sustainability, and design, poses a significant gap in current UAV 3D modeling research. For instance, transportation plays a vital role in urban planning, as it directly impacts mobility, accessibility, and the overall functioning of cities. However, there is a scarcity of studies exploring the potential of UAV 3D modeling in optimizing transportation infrastructure, analyzing traffic patterns, or designing efficient transportation networks. Integrating UAV technology into transportation planning can provide valuable insights into traffic flow, pedestrian movement, and public transit systems, leading to more informed decision-making and improved urban mobility. Hence, achieving a more comprehensive balance across these various disciplines could benefit urban planning and development. As another example, planning should play a crucial role in aiding cities in climate change mitigation and adaptation efforts [63]. Detailed 3D models can be used to assess multiple land-use scenarios for adaptation purposes. 3D models are also useful in identifying high-impact areas for retrofitting building stock to reduce operational carbon [64]. Additionally, 3D models can be useful in analyzing existing building stock to better estimate embodied carbon associated with building reuse and preservation or systematic deconstruction and reuse [64,65]. Whether planning for climate change mitigation or adaptation, data collected at high resolution using UAVs may assist in gathering and rendering in 3D fine-grained information about building materials and construction types.
Thirdly, there appears a lack of pairing UAVs with 3D models to respond to urban scenarios. With the increasing occurrence of natural disasters, wars, and conflicts in urban areas, there is a pressing need for research on UAV 3D modeling for urban disaster prevention and post-disaster reconstruction. However, the current literature does not adequately explore these specific scenarios. For example, UAV-based 3D modeling can contribute to the post-disaster reconstruction process by facilitating accurate damage assessment, guiding reconstruction efforts, and assisting in the planning and design of resilient infrastructure. One notable example is the work presented by [66], where the authors employ drone imagery and 3D models to assess post-earthquake damage in historical stone masonry buildings, the authors used computer vision, structure from motion, and machine learning to automate damage assessment, generating lightweight damage-augmented digital twins (DADTs) at LOD3 to eliminates the need for manual intervention and offers efficient storage solutions. The creation of detailed and up-to-date 3D models using UAV technology enables urban planners and decision-makers to visualize the extent of damage, identify critical areas for intervention, and develop strategic plans for rebuilding safer and more resilient communities. Expanding the scope of the investigation to encompass disaster-resilient urban planning and reconstruction will contribute to more effective responses and enhanced urban resilience.
Fourthly, there was little integration with the literature on smart cities despite the growing importance of smart cities in urban development. Smart cities aim to leverage advanced technologies to improve the quality of life, enhance sustainability, and optimize resource utilization. However, the existing literature lacks in-depth research on the integration of UAV 3D modeling in smart city initiatives, particularly concerning its incorporation with high-quality human life aspects such as smart transportation and public facilities. By capturing detailed 3D models of existing infrastructure and urban spaces, UAVs can aid in facility management, maintenance, and optimization. Exploring and harnessing the potential synergies between UAV 3D modeling and smart city planning is crucial for fostering innovation and efficiency in urban development.
Lastly, lack of intersectionality with other disciplines. Urban planning is inherently multidisciplinary and interdisciplinary, requiring collaboration and knowledge exchange across various fields such as geography, engineering, and environmental science. However, the current literature does not sufficiently explore the intersectionality between UAV 3D modeling and these disciplines. Collaborations between urban planners, geographers, engineers, environmental scientists, social scientists, and other architects can enrich the understanding and practice of UAV 3D modeling in urban environments. Bridging these gaps and fostering interdisciplinary research efforts will lead to more comprehensive and robust approaches to urban planning, enriching the understanding and practice of UAV 3D modeling in urban environments.
Addressing these challenges and gaps identified in the reviewed articles will be crucial for advancing UAV-based 3D modeling in urban environments. By striving for a more balanced research focus, incorporating special scenarios, integrating with smart city planning, and embracing interdisciplinary collaboration, future research can contribute to more inclusive, sustainable, and resilient urban development.
The following section will explore the practical limitations and barriers of UAV 3D modeling for planning, building upon the critical challenges and gaps identified earlier. By understanding these limitations and barriers, we address the practical challenges that hinder the integration of UAV 3D modeling in planning practice.
4. Existing Limitations and Barriers of UAV 3D Modeling for Planning
UAVs can be useful in 3D modeling applications due to their ability to capture high-resolution imagery at a relatively low cost. However, despite their advantages, UAV-based 3D modeling has limitations and barriers. Table 2 shows a summary of the significant limitations of UAV 3D modeling for planning.
4.1. Policy
The increasing public presence of UAVs resulted in a wide variety of concerns among the public, with a majority of them involving personal privacy [69,72]. Many recreational UAVs are equipped with zoom cameras and have been seen in residential areas and private properties without permission, leading to potential privacy issues. There are also concerns regarding safety, noise, and privacy due to a lack of regulation [70]. Lack of regulation has also led to safety concerns as UAVs can distract drivers and cause car accidents in urban areas [68]. It has been found by the International Civil Aviation Organization (ICAO) that the motors, propellers, and airframe of UAVs could produce a significant amount of noise that can be perceived as annoying for the public [70]. In addition, the complex urban environment may interfere with the UAV’s electronic signals or obstacle-sensing system and cause consequential incidents. For instance, UAVs may fly in close proximity to buildings in the process of collecting data for 3D modeling, while wind, low-light conditions, glass and other reflective material on a building’s surface, as well as certain electronics that may cause UAVs to lose control [14,46,73].
Various rules regulate the use of UAVs in different countries and cities. Some cities like New York City officially prohibit the use of UAVs within the urban environment [81]. The Federal Aviation Administration (FAA) has established guidelines to regulate the operation of UAVs, stipulating that they should not be flown over people and must remain within the pilot’s line of sight [22,82]. A specialized license or permit is mandatory for individuals to use a drone in a professional capacity in several countries, including the United States [83]. However, compliance with these policies can prove arduous, particularly during 3D modeling endeavors where UAVs must navigate through difficult-to-reach locations to aid researchers. As a result, individuals may be disinclined to register their UAVs, leading to a significant number of unregistered UAVs in operation.
Despite the FAA having created regulations regarding where pilots are allowed to operate UAVs, there are still gaps on the no-fly zone map that need to be filled. To address this issue, the FAA should implement policies that request UAV pilots to use indicators to warn people in the area and notify the local government. UAV manufacturers and the FAA could also develop a platform to identify UAVs in real-time and provide detailed information such as flight location, attitude, path and other geographic information to help local governments inform individuals if needed.
Cross-cultural communication is a critical aspect of working with teams in different regions of the world when operating UAVs, particularly when the project involves local historic preservation. In such situations, misunderstandings and delays in project completion can arise due to cultural differences [44]. To address this issue, researchers should incorporate cross-cultural communication training and education into their projects. Before conducting site analysis, researchers should carry translation devices to communicate with residents who speak a different language, while also seeking guidance from them to facilitate communication. This approach can promote cross-cultural understanding and cooperation, and increase the likelihood of success for the research project. Prior to conducting site analysis, researchers should ensure that residents are properly informed and engaged in the process. Researchers and practitioners should be particularly mindful of flying drones in areas that are culturally significant to indigenous people and seek out appropriate cultural protocols for asking permission and refrain from flying without prior permission granted.
4.2. Environment
UAVs are not always stable and safe, they can cause security risks when flying near airports, electric power grids, and other high-population-density areas. In the urban environment, UAVs pose a threat to properties and human safety if an impact happens. The function of UAVs can be greatly affected by environmental factors. According to Hodgson and Chang [73], the line of sight and signal connection of UAVs can be affected by obstacles such as trees and low light conditions. Another constraint is the effect of obstacles such as trees on the line of sight, which can cause incomplete data collection and inaccurate modeling. Despite researchers developing strategies that use AI and overlap imaging to mitigate the problem, additional improvement is still necessary [46]. In addition, environmental factors such as high wind, hail, and rain can impact the stability of UAVs, as noted by Grubesic et al. [74] and Fairley et al. [75]. Weather is generally unpredictable, researchers may encounter a variety of sudden environmental factors such as high wind, hail, and rain [76]. UAVs’ signal transmission system, Global Position System (GPS), as well as the Inertial Measurement Unit (IMU), can be impacted while flying in the urban environment. When GPS or IMU is compromised, DJI’s UAVs cannot position themselves or break automatically and will enter DJI ATTI Mode (Attitude-Mode), which puts them in manual mode and makes them susceptible to hazardous shifting even with a slight wind. When the signal is lost, the UAVs may enter return to home mode, but the obstacle system may not work in certain conditions, leading to crashes [71].
The authors believe that advancements in UAV design and engineering can address the critical aspects of stability and resilience. It is crucial to focus on developing UAV structures that are not only stronger and more durable but also capable of withstanding adverse weather conditions. The integration of redundant systems and backup power sources, alongside the implementation of improved communication protocols, will play a pivotal role in enhancing reliability and ensuring safety. In addition to these measures, emerging technologies like swarm intelligence and cooperative control systems offer promising solutions to address stability and safety concerns. These technologies enable coordinated and collaborative operations among multiple UAVs, mitigating the risks associated with individual failures and bolstering overall system resilience. By consistently advancing in areas such as sensor integration, design practices, and appropriate regulatory frameworks, UAVs can become more reliable and safe to operate efficiently in complex urban environments.
4.3. Disciplinary
Many of the studies that were identified focused on specific research projects related to planning and historic preservation. However, there are remaining barriers hindering the adoption of drone imagery and 3D models in government offices responsible for overseeing planning and preservation efforts. These barriers are often rooted in disciplinary and institutional factors that impede the wider integration of UAV technologies in urban planning. One of the key disciplinary challenges lies in the different roles and responsibilities of planners and architects/engineers in the planning process. Planners, who assess applications for new development and make decisions based on urban planning principles, typically do not generate their own digital models or imagery. Instead, they rely on architects and engineers to provide specialized information. As a result, there is often no requirement for enhanced 3D models from the planners’ perspective. This disconnect between the disciplines of planning and architecture/engineering hinders the seamless integration of UAV-derived data and 3D models into the planning workflow.
Furthermore, urban planning programs generally do not prioritize the teaching of Building Information Modeling (BIM) and 3D modeling skills, which are essential components of an architectural degree. Consequently, there is a shortage of planners with the necessary skills to create 3D models or process drone photogrammetry. This disciplinary gap contributes to the limited adoption of UAV technologies in government planning offices, as the personnel may lack the expertise and confidence to leverage these emerging tools effectively.
In addition to disciplinary challenges, institutional barriers also exist within planning and preservation offices. Many of these offices have limited capacity to allocate personnel or invest in new technologies. Moreover, routine tasks like tax assessment or long-range planning processes often rely more heavily on geographical information systems (GIS) tools rather than drone imagery or 3D modeling. The lack of resources, both human and financial, further exacerbates the institutional obstacles to the wider adoption of these technologies.
To address these disciplinary and institutional challenges, establishing partnerships with universities becomes crucial. Universities often possess specialized technological capabilities and can contribute to bridging the gap between academia, government practice, and the non-governmental and private sectors. These collaborations can facilitate knowledge transfer, training programs, and capacity-building initiatives. By leveraging the expertise and resources available in academia, government offices, and private sectors can overcome the shortage of skills and resources, thereby incorporating UAV technologies, digital twins, and drone imagery for improved planning and preservation outcomes.
Moreover, university-government partnerships provide a platform for joint research projects, where academics and practitioners can collaborate to develop innovative solutions tailored to the needs of urban planning and historic preservation. These partnerships can help generate evidence-based best practices, develop standardized workflows, and establish guidelines for the effective utilization of UAV technologies. Additionally, universities can contribute to the training and education of future planners by incorporating UAV technologies and 3D modeling into urban planning programs, preparing a new generation of professionals with the necessary skills to utilize these tools effectively.
4.4. Hardware
The operation of UAVs is limited by the UAV’s battery capacity and surrounding environments such as wind and temperature [35]. Although UAV manufacturers have been working to increase flight time without sacrificing payload, for example, propellers can provide extended flight time after adopting a better aerodynamic design [84]. In practice, the flight time of UAVs typically does not exceed 60 minutes. As an example, DJI’s newest maximum flight time UAV is MATRICE 300 RTK, which allows up to 55 minutes in the sky without payload, however, the actual flight time varies and could be lowered to 20-35 minutes on a mission while equipped with a Lidar + RGB aerial surveying camera Zenmuse L1 [85]. In the meantime, the UAV’s actual flight time may be affected by environmental and load conditions [68]. Besides, longer charge cycles and storage times will lead to reduced battery life, while flying at higher altitudes and in warmer air can also decrease the flight time of a UAV, resulting in unstable and unpredictable flight durations. [6,24,77]. 3D modeling and tilt photography commonly require more than an hour of workload, and changing the battery during shooting is not preferred.
In addition, RTK-enabled GPS systems provide centimeter-level accuracy and precision in positioning data, which is essential for creating high-quality 3D models [74,78,79]. Without RTK, UAVs rely on traditional GPS systems that provide only meter-level accuracy. This level of accuracy may not be sufficient for creating detailed and accurate 3D models. As RTK systems are more expensive than traditional GPS systems, the cost can be a significant barrier for both UAV manufacturers and researchers. Thus, the limitation of battery and RTK is a significant challenge for the advancement of UAVs in urban planning.
Optimizing aerodynamic designs and propulsion systems can extend flight time without sacrificing payload capacity. Additionally, advancements in battery technology, such as increased energy density and faster charging capabilities, need to be pursued to enhance UAV endurance. Future innovations may involve the integration of alternative power sources like solar panels or the development of smart power management systems to optimize energy usage. The adoption of RTK-enabled GPS systems provides centimeter-level precision necessary for high-quality 3D modeling. Continued research and development efforts can lead to more cost-effective RTK solutions or alternative positioning technologies that offer similar accuracy at a lower cost.
4.5. Software
One major limitation of UAV 3D modeling is the requirement for a dependable and high-bandwidth internet connection. The transmission of data from the UAV to the ground station demands substantial bandwidth, and interruptions in internet connectivity can hinder the timely upload of critical data, potentially leading to the loss of vital information [44]. Additionally, the process of generating 3D models entails a complex computational system and often necessitates specialized technical expertise. According to the articles reviewed, the most commonly used 3D modeling software for UAVs includes commercial solutions like Pix4D and Agisoft PhotoScan/Metashape. However, it’s essential to recognize that these software packages can come with expensive licensing fees, and they might also require high-end graphics cards for efficient image processing. [45,46].
To overcome internet connectivity challenges, advancements in data compression techniques can reduce the bandwidth requirements for transmitting UAV data. Additionally, the use of onboard processing capabilities can alleviate the reliance on real-time data transmission, enabling the UAV to process and store data locally before transferring it when a stable internet connection becomes available.
In terms of software limitations, ongoing technological progress is anticipated to enhance the accessibility of UAV 3D modeling. The costs associated with high-end graphics cards and professional modeling software may gradually decrease, making them more cost-effective for researchers and planners alike. In the foreseeable future, the advent of cloud-based solutions for UAV data processing and modeling is expected. Such solutions would shift the computational workload to robust remote servers, negating the necessity for expensive processing systems on the user’s end. Additionally, the development of user-friendly software interfaces and the availability of training courses will streamline the 3D modeling process.
It’s essential to acknowledge that the landscape of available software extends well beyond commercial options. Researchers in fields like computer vision frequently turn to open-source alternatives such as COLMAP, VisualSFM, and Meshroom [86,87]. While these open-source tools may not deliver the same level of optimization as their commercial counterparts, they furnish potent resources for crafting innovative methodologies, particularly those essential for generating 3D models.
Additionally, advancements in machine learning and artificial intelligence can assist in automating tasks such as feature extraction, image alignment, and model generation, reducing the need for manual intervention and specialized technical knowledge. In response to the critical need for automating image acquisition in UAV-based infrastructure inspections, researchers have been actively developing autonomous navigation planning systems. These systems leverage computer vision techniques and deep learning algorithms to enable UAVs to autonomously capture images suitable for 3D modeling. One promising application focuses on post-earthquake inspections of reinforced concrete railway viaducts; this approach offers a solution to the time-consuming manual operation of image acquisition; it achieves centimeter-level accuracy in detecting critical structural components, such as columns, and allows the UAV to progressively improve its mapping as it captures more views during the inspection [88]. Another study introduced an automated framework for recognizing bridge components using UAV imagery and 3D point clouds, significantly improving classification accuracy [89]. Additionally, a third paper proposed a computer vision-based framework for automating post-earthquake building inspections with UAVs, offering high accuracy in damage identification and assessment [90]. These advancements are expected to reduce the cost of professional modeling software, making large-scale modeling more accessible for researchers and planners.
5. Discussions
UAV technology could play a more central role in urban planning and historic preservation practices, especially in their use to enhance the creation of 3D models. UAVs’ Lidar and RGB sensors are particularly effective for 3D modeling, assessing infrastructure height and area size, and obtaining real-time data as a new aerial surveying tool. The application of the UAV 3D information model for urban planning is an important branch of UAV technology application.
This paper provides a comprehensive systematic review and analysis of the current and potential applications of UAVs in urban and regional planning, while also addressing the existing limitations. Despite the promising opportunities offered by UAV technology, its effective use in urban planning is hindered by various factors, including institutional and disciplinary barriers related to the adoption of 3D modeling and drone imagery. Additionally, limited endurance, stability, safety concerns, and regulatory variations pose further challenges. The complexity of 3D modeling and image processing also adds to the difficulties faced in leveraging UAVs for urban planning purposes. To overcome these limitations and fully harness the potential of UAVs in urban planning, it is imperative to establish interdisciplinary collaborations and forge partnerships between universities and government entities. Unlike university-enterprise partnerships that primarily focus on commercial applications, university-government collaborations prioritize research, technical support, and the development of tailored solutions specific to the requirements of planning and preservation offices. These partnerships offer the unique advantage of combining academic expertise and resources with the practical needs and insights of government planning offices. By fostering these collaborations and enhancing integration between technologies, we can effectively utilize the advantages of UAV technology and elevate the quality of urban planning work. In this context, researchers play a pivotal role in promoting the further development of UAV technology and providing essential technical support for urban planning and construction.
In spite of the limitations mentioned above, UAVs have great potential with a significant advantage over ground-based surveying and modeling technologies, such as low cost, high accuracy, creation of images in real time, and time efficiency. In addition to taking over the role of aerial photography, UAVs could eventually replace traditional airplane or satellite aerial photogrammetry for small and mid-size neighborhood planning. UAVs have the potential to perform intelligent data processing in real time, leading to a reduction in measurement time and cost. This, in turn, can improve the cost effectiveness of UAV aerial photography in urban planning. The three-dimensional data can vividly reflect a planning area’s appearance, position, height and other attributes, compensating for the low-level defect of traditional artificial modeling and simulation. It also obtains more comprehensive surface texture details and facilitates spatial analysis of building area ratio, building density and sunlight in the three-dimensional model, so as to facilitate a more accurate design and construction, effectively avoid reconstruction and shorten construction time [91]. The main functions of UAV 3D modeling that can be drawn are the following:
Smart city initiatives are a major area where UAV 3D modeling could be used. The models created by UAVs provide an in-depth view of the built environment, including the precise location and spatial arrangement of buildings, roads, and infrastructure elements [7,25,92,93]. This information is critical to decision-makers tasked with planning and managing urban growth in a sustainable and efficient manner. This data serves multiple purposes, it enables decision-makers to visualize and analyze the existing urban infrastructure, identify patterns and trends, and make informed decisions regarding urban growth and development. The detailed 3D models provide a comprehensive view of the urban environment, facilitating the assessment of infrastructure capacity, traffic flow, and resource allocation. Furthermore, the data derived from UAV 3D modeling can be integrated with other data sources, such as geographic information systems (GIS) and sensor networks, to create comprehensive and dynamic digital representations of the city. This integrated data can be used for various applications, including urban simulations, scenario modeling, and predictive analysis, to optimize resource utilization, enhance urban mobility, and improve overall urban livability.
In addition to smart city planning, UAV 3D modeling could play an even more expansive role in historic preservation than it already does. By surveying and mapping historic landmarks and buildings, UAVs provide valuable information to urban planners and heritage organizations. This information can be used to guide preservation efforts and ensure that a city’s cultural heritage is preserved for future generations. For instance, the 3D models of historical sites captured by UAVs can be imported into gaming or rendering software like Unity, Blender, Unreal Engine, Lumion, and Twinmotion. This integration allows for the creation of immersive and visually engaging first-person virtual reality (VR) mini-games. These VR experiences can be utilized as educational tools to engage and motivate youth and students, fostering their interest in learning more about the historical site. By exploring the site virtually, they can gain a deeper understanding of its significance and cultural value. Moreover, the use of UAV 3D models in gaming or rendering software assists planners in better understanding the site. By visualizing the historical structures and their surroundings in a virtual environment, planners can assess the site’s potential for adaptive reuse or repurposing. This technology enables them to identify opportunities for integrating historical buildings into contemporary urban contexts, while also considering sustainable practices. 3D models may aid in identifying materials suitable for reuse, contributing to sustainable construction practices and reducing environmental impact.
Another important area where UAV 3D modeling is being used is in environmental impact assessment [75]. By surveying and assessing the impact of new development projects on the natural environment, UAVs provide valuable information to urban and regional planners. Detailed 3D models aid in visualizing ecosystem impacts and analyzing land use, vegetation, water bodies, and wildlife habitats. This data-driven approach helps identify sensitive areas, mitigate negative effects, and promote responsible urban development. UAVs also evaluate conservation efforts, track changes over time, and enhance transparency and public engagement through visual representations of potential impacts.
The authors believe that the utilization of UAV 3D technology holds significant value in post-war urban rebuilding efforts. In the aftermath of wars, cities often face intricate challenges in assessing and measuring the damage to their urban landscapes, making it challenging to plan reconstruction effectively. In such contexts, UAVs equipped with 3D imaging capabilities emerge as a valuable solution. They can capture high-precision aerial imagery and generate detailed 3D maps, aiding urban planners and architects in obtaining a comprehensive understanding of the post-war conditions in affected areas. This information becomes instrumental in devising strategies for rebuilding these cities on a global scale. The high-resolution imagery and precise 3D models produced by UAVs empower planners to visualize the extent of the damage, prioritize areas that need immediate attention, and allocate resources strategically for maximum impact. By extending the application of UAV 3D technology beyond specific regions, we can harness its potential to aid post-war reconstruction efforts worldwide, contributing to the revitalization and resilience of communities affected by conflicts.
6. Conclusions
The literature highlights a significant disparity in the use of UAVs between enhancing 3D modeling in cultural heritage and historic preservation versus urban planning. Urban planning can benefit from the expertise of heritage professionals, who have long been concerned with the representation and analysis of the built environment. Furthermore, even within preservation practice, there is room for expanding the utilization of UAVs and 3D modeling. Both disciplines face urgent challenges related to climate change and disaster response. Preservationists and planners share common concerns regarding properties located in coastal hazard zones, fire-prone areas, and other climate change-related threats. Drone photogrammetry can enhance the resolution of urban representations, enabling more effective scenario planning and citizen engagement. This technology can aid in identifying and protecting elements of the built environment that are at risk. Moreover, it can contribute to climate mitigation efforts by facilitating better estimation of areas with high solar potential and identifying locations for conserving operational and embodied energy on a larger scale. By leveraging UAVs and 3D modeling, urban planning can learn valuable lessons from heritage experts and address pressing climate change imperatives. Collaborative efforts between these fields hold the potential to create more resilient and sustainable urban environments.
Finally, UAV 3D modeling also plays a critical role in disaster response and management. During times of natural disasters, UAVs equipped with 3D modeling capabilities provide real-time information about the built environment. This data assists urban and regional planners in making informed decisions to respond effectively and efficiently. The dynamic and up-to-date 3D models created by UAVs help identify potential hazards, locate survivors, and plan rescue operations accordingly. The applications of UAV 3D modeling technology extend beyond immediate response efforts as it can also be utilized for infrastructure planning and design. Real-time 3D models offer insights into the built environment, enabling planners to optimize the placement of essential facilities, transportation networks, and utilities. This leads to the development of more resilient and efficient infrastructure systems in disaster-prone areas. The visual representation provided by UAV 3D modeling technology will also assist in raising public awareness and supporting decision-making processes. Detailed and realistic 3D models help communicate the scale and impact of war or disaster-related damage to the general public and decision-makers.
7. Future Prospects
The authors believe that integrating UAVs and 3D modeling technology into urban and regional planning will have a profound impact on the field. In this context, the future prospects for UAV 3D modeling are numerous and exciting, especially with the above real-world projects using UAVs equipped with high-resolution cameras to create detailed 3D models of the built environment. We believe UAV 3D modeling could be transformative for planning practice and the planning support systems that planners rely upon. By creating highly detailed 3D models of cities, UAVs provide planners with valuable insights and data that can inform a wide range of initiatives. From smart city planning to heritage preservation efforts and disaster response and management, 3D UAV modeling could prove to become an indispensable tool for visualizing and analyzing cities.
We also propose an area of exploration that involves the integration of quadruped robots with drones to create advanced 3D models. By equipping both robots and drones with LiDAR scanners and cameras, it becomes possible to capture high-quality 3D data from both aerial and ground perspectives, as well as indoor environments. This integration has the potential to enhance virtual reality (VR) experiences by providing a more immersive representation of the built environment. Additionally, the combination of data obtained from robots and drones allows for cross-validation, resulting in more accurate and reliable results. This approach significantly improves the quality and precision of 3D models, enabling more informed decision-making and streamlined urban planning processes. The merging of robots and drones holds great promise for the future of UAV-based 3D modeling and has the potential to revolutionize the field. Further research and development in this area will unlock new possibilities for capturing comprehensive and detailed representations of urban environments.
In summary, the use of UAV 3D modeling in urban planning is providing valuable insights and data that are informing a wide range of initiatives, from smart city planning to historic preservation. As the technology continues to advance and become more accessible, we expect UAV 3D modeling to become an even more important tool for urban and regional planners over the next decade. Despite extensive literature on the topic, significant research gaps still persist in the field of planning. There is also a lack of studies regarding rapid UAV 3D modeling, for instance, emergency situations require planners to be able to complete site data collection and post-modeling as soon as possible to aid in emergency response, therefore it is necessary to examine the actual flight time and flight area ratio, as well as computer system specs and modeling time. Thus, we urge scholars to expand the application domain, address the outstanding limitations, and scrutinize the integration of UAV 3D modeling with other disciplines, such as integrating UAV 3D modeling with AI and ground robots, environmental science and architecture, to foster the creation of more sustainable cities.
In future research, the authors are committed to addressing critical research gaps, with a particular focus on rapid UAV 3D modeling and its seamless integration with cutting-edge technologies like AI and robotics. These efforts aim to advance the field by pioneering novel methodologies and solutions, enhancing the capabilities of UAV 3D modeling in urban and regional planning, ultimately promoting the development of more sustainable and resilient cities. Furthermore, the authors plan to venture into the realm of urban simulation, harnessing the power of gaming engines such as Unreal Engine and Unity. Their objective is to import drone data into these engines to craft immersive and visually stunning virtual city simulations. This innovative approach serves as a dynamic platform not only for urban planning but also for educational purposes and public engagement. By merging the precision of UAV 3D modeling with gaming technology, these simulations offer potent tools for gaining deeper insights into urban complexities and facilitating informed planning decisions. This integration of urban simulation with UAV 3D modeling and other advanced technologies represents a crucial step toward more enlightened and sustainable urban development, a path that the authors are committed to exploring in their future studies.
Author Contributions
Conceptualization, D.H. and J.M.; methodology, D.H.; software, D.H.; writing—original draft preparation, D.H.; writing—review and editing, D.H. and J.M.; visualization, D.H.; supervision, J.M.; . All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
Not Applicable.
Acknowledgments
The project received generous support from the Cornell University College of Architecture, Art and Planning; the Department of City and Regional Planning; and the Clarence Stein Institute for Urban and Landscape Studies.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Hostert, P., Advances in Urban Remote Sensing: Examples From Berlin (Germany). In Applied Remote Sensing for Urban Planning, Governance and Sustainability; Netzband, M.; Stefanov, W.L.; Redman, C., Eds.; Springer Berlin Heidelberg: Berlin, Heidelberg, 2007; pp. 37–51. [CrossRef]
- Bakogiannis, E.; Kyriakidis, C.; Zafeiris, V. Using Unmanned Aerial Vehicles (UAVs) to Analyze the Urban Environment. European Journal of Formal Sciences and Engineering 2022, 5, 49–60. [CrossRef]
- de Castro, A.I.; Shi, Y.; Maja, J.M.; Peña, J.M. UAVs for Vegetation Monitoring: Overview and Recent Scientific Contributions. Remote Sensing 2021, 13. [CrossRef]
- Zhang, H.; Wang, L.; Tian, T.; Yin, J. A Review of Unmanned Aerial Vehicle Low-Altitude Remote Sensing (UAV-LARS) Use in Agricultural Monitoring in China. Remote Sensing 2021, 13. [CrossRef]
- Kleinschroth, F.; Banda, K.; Zimba, H.; Dondeyne, S.; Nyambe, I.; Spratley, S.; Winton, R.S. Drone imagery to create a common understanding of landscapes. Landscape and Urban Planning 2022, 228, 104571. [CrossRef]
- Shakhatreh, H.; Sawalmeh, A.H.; Al-Fuqaha, A.; Dou, Z.; Almaita, E.; Khalil, I.; Othman, N.S.; Khreishah, A.; Guizani, M. Unmanned Aerial Vehicles (UAVs): A Survey on Civil Applications and Key Research Challenges. IEEE Access 2019, 7, 48572–48634. [CrossRef]
- Tan, R.; Li, P.; Lin, W.; Pan, C. Improvement of 3D Urban Modeling Method Based on Unmanned Aerial Vehicle Oblique Photography. Bulletin of Surveying and Mapping 2016, pp. 39–42.
- Herwitz, S.; Johnson, L.; Dunagan, S.; Higgins, R.; Sullivan, D.; Zheng, J.; Lobitz, B.; Leung, J.; Gallmeyer, B.; Aoyagi, M.; Slye, R.; Brass, J. Imaging from an unmanned aerial vehicle: agricultural surveillance and decision support. Computers and Electronics in Agriculture 2004, 44, 49–61. [CrossRef]
- Yao, H.; Qin, R.; Chen, X. Unmanned Aerial Vehicle for Remote Sensing Applications—A Review. Remote Sensing 2019, 11. [CrossRef]
- Allouche, M. The integration of UAVs in airspace. Air & Space Europe 2000, 2, 101–104. [CrossRef]
- Yang, Y.; Zhang, L.; Ye, Y.; Wang, Z. Curbing Sprawl with Development-limiting Boundaries in Urban China: A Review of Literature. Journal of Planning Literature 2020, 35, 25–40. [CrossRef]
- Watts, A.C.; Ambrosia, V.G.; Hinkley, E.A. Unmanned Aircraft Systems in Remote Sensing and Scientific Research: Classification and Considerations of Use. Remote Sensing 2012, 4, 1671–1692. [CrossRef]
- Liénard, J.; Vogs, A.; Gatziolis, D.; Strigul, N. Embedded, real-time UAV control for improved, image-based 3D scene reconstruc- 895 tion. Measurement 2016, 81, 264–269. doi:.
- Gatziolis, D.; Lienard, J.F.; Vogs, A.; Strigul, N.S. 3D tree dimensionality assessment using photogrammetry and small unmanned aerial vehicles. bioRxiv 2015. [CrossRef]
- Alsadik, B.; Gerke, M.; Vosselman, G. Automated camera network design for 3D modeling of cultural heritage objects. Journal of Cultural Heritage 2013, 14, 515–526. [CrossRef]
- Westoby, M.; Brasington, J.; Glasser, N.; Hambrey, M.; Reynolds, J. ‘Structure-from-Motion’ photogrammetry: A low-cost, effective tool for geoscience applications. Geomorphology 2012, 179, 300–314. [CrossRef]
- Musakwa, W.; van Niekerk, A. Earth Observation for Sustainable Urban Planning in Developing Countries: Needs, Trends, and Future Directions. Journal of Planning Literature 2015, 30, 149–160. [CrossRef]
- Lu, Y. Using Google Street View to investigate the association between street greenery and physical activity. Landscape and Urban Planning 2019, 191, 103435. [CrossRef]
- Li, X.; Chen, X. Research on 3D modeling method of geological section based on UAV Aerial Photography. Scientific and Technological Innovation 2021, 9, 55–56.
- Wan, D. Research on the Application Practice of UAV in Urban Planning Measurement. Management & Technology of SME 2021, 660, 188–190.
- Kikuchi, N.; Fukuda, T.; Yabuki, N. Future landscape visualization using a city digital twin: integration of augmented reality and drones with implementation of 3D model-based occlusion handling. Journal of Computational Design and Engineering 2022, 9, 837–856. [CrossRef]
- Jeziorska, J. UAS for Wetland Mapping and Hydrological Modeling. Remote Sensing 2019, 11. [CrossRef]
- Zhang, B.; Zhang, L. Study on the application of 3D modeling based on UAV photography in urban planning — Taking Yi Jiequ area in Du Jiangyan as an example. AIP Conference Proceedings 2017, 1864, 020226. [CrossRef]
- Butilă, E.V.; Boboc, R.G. Urban Traffic Monitoring and Analysis Using Unmanned Aerial Vehicles (UAVs): A Systematic Literature 917 Review. Remote Sensing 2022, 14. doi:.
- Hurtado, P.; Gomez, A. Smart City Digital Twins Are a New, Hi-Tech Tool for Scenario Planning. American Planning Association 2021. Available online: https://www.planning.org/planning/2021/spring/smart-city-digital-twins-are-a-new-tool-for-scenario-planning/ (accessed 1 November 2023).
- Minner, J.; Chusid, J. Time, Architecture, and Geography: Modeling the Past and Future of Cultural Landscapes. APT Bulletin 2016, 47, 49–58.
- Minner, J.; Chusid, J.; Shi, X.; Feng, Y.; Sun, F.; Azel, N.; Taru, T. Visualizing the Past, Present, and Future of New York City’s 1964-5 World’s Fair Site Using 3D GIS and Procedural Modeling 2017.
- Bobylev, N.; Syrbe, R.U.; Wende, W. Geosystem services in urban planning. Sustainable Cities and Society 2022, 85, 104041. [CrossRef]
- Garstki, K. Virtual representation: The production of 3d digital artifacts. Journal of Archaeological Method and Theory 2017, 24, 726–750. [CrossRef]
- Deng, L.; Mao, Z.; Li, X.; Hu, Z.; Duan, F.; Yan, Y. UAV-based multispectral remote sensing for precision agriculture: A comparison between different cameras. ISPRS Journal of Photogrammetry and Remote Sensing 2018, 146, 124–136. [CrossRef]
- Maes, W.H.; Steppe, K. Perspectives for Remote Sensing with Unmanned Aerial Vehicles in Precision Agriculture. Trends in Plant Science 2019, 24, 152–164. [CrossRef]
- Messina, G.; Modica, G. Applications of UAV Thermal Imagery in Precision Agriculture: State of the Art and Future Research Outlook. Remote Sensing 2020, 12. [CrossRef]
- Rejeb, A.; Abdollahi, A.; Rejeb, K.; Treiblmaier, H. Drones in agriculture: A review and bibliometric analysis. Computers and Electronics in Agriculture 2022, 198, 107017. [CrossRef]
- Yunus, A.M.; Hamzah, A.H.; Azmi, F.A.M. Drone Technology as A Modern Tool in Monitoring the Rural-Urban Development. IOP Conference Series: Earth and Environmental Science 2020, 540, 012076. [CrossRef]
- Kim, D. Pedestrian and Bicycle Volume Data Collection Using Drone Technology. Journal of Urban Technology 2020, 27, 45–60. [CrossRef]
- Bhatnagar, S.; Gill, L.; Regan, S.; Waldren, S.; Ghosh, B. A nested drone-satellite approach to monitoring the ecological conditions of wetlands. ISPRS Journal of Photogrammetry and Remote Sensing 2021, 174, 151–165. [CrossRef]
- Donaire, J.A.; Galí, N.; Gulisova, B. Tracking visitors in crowded spaces using zenith images: Drones and time-lapse. Tourism Management Perspectives 2020, 35, 100680. [CrossRef]
- Karachaliou, E.; Georgiou, E.; Psaltis, D.; Stylianidis, E. UAV FOR MAPPING HISTORIC BUILDINGS: FROM 3D MODELLING TO BIM. The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences 2019, XLII-2/W9, 397–402. [CrossRef]
- Li, Y. UAV Photogrammetry and its Application in Urban Planning. Metallurgy and Materials 2018, 38, 181–182.
- Tariq, A.; Gillani, S.M.O.A.; Qureshi, H.K.; Haneef, I. Heritage preservation using aerial imagery from light weight low cost Unmanned Aerial Vehicle (UAV). 2017 International Conference on Communication Technologies (ComTech), 2017, pp. 201–205. [CrossRef]
- Berrett, B.E.; Vernon, C.A.; Beckstrand, H.; Pollei, M.; Markert, K.; Franke, K.W.; Hedengren, J.D. Large-Scale Reality Modeling of a University Campus Using Combined UAV and Terrestrial Photogrammetry for Historical Preservation and Practical Use. Drones 2021, 5. [CrossRef]
- Erenoglu, R.; Erenoglu, O.; Arslan, N. Accuracy Assessment of Low Cost UAV Based City Modelling for Urban Planning. Tehnicki Vjesnik 2018, 25, 1708–1714. [CrossRef]
- Zhang, D.; Xu, F.; Pun, C.M.; Yang, Y.; Lan, R.; Wang, L.; Li, Y.; Gao, H. Virtual Reality Aided High-Quality 3D Reconstruction by Remote Drones. ACM Trans. Internet Technol. 2021, 22. [CrossRef]
- Campbell, D.A. Drones, Machetes, and Virtual Reality: 21st-Century Tools for Historic Preservation. 2018 3rd Digital Heritage International Congress (DigitalHERITAGE) held jointly with 2018 24th International Conference on Virtual Systems & Multimedia (VSMM 2018), 2018, pp. 1–4. [CrossRef]
- Skondras, A.; Karachaliou, E.; Tavantzis, I.; Tokas, N.; Valari, E.; Skalidi, I.; Bouvet, G.A.; Stylianidis, E. UAV Mapping and 3D Modeling as a Tool for Promotion and Management of the Urban Space. Drones 2022, 6. [CrossRef]
- Xu, Z.; Wu, L.; Gerke, M.; Wang, R.; Yang, H. Skeletal camera network embedded structure-from-motion for 3D scene reconstruction from UAV images. ISPRS Journal of Photogrammetry and Remote Sensing 2016, 121, 113–127. [CrossRef]
- Ferworn, A.; Tran, J.; Ufkes, A.; D’Souza, A. Initial experiments on 3D modeling of complex disaster environments using unmanned aerial vehicles. 2011 IEEE International Symposium on Safety, Security, and Rescue Robotics, 2011, pp. 167–171. [CrossRef]
- Mohd Noor, N.; Ibrahim, I.; Abdullah, A.; Abdullah, A.A.A. Information Fusion for Cultural Heritage Three-Dimensional Modeling of Malay Cities. ISPRS International Journal of Geo-Information 2020, 9. [CrossRef]
- Manajitprasert, S.; Tripathi, N.K.; Arunplod, S. Three-Dimensional (3D) Modeling of Cultural Heritage Site Using UAV Imagery: A Case Study of the Pagodas in Wat Maha That, Thailand. Applied Sciences 2019, 9. [CrossRef]
- Remondino, F. Heritage Recording and 3D Modeling with Photogrammetry and 3D Scanning. Remote Sensing 2011, 3, 1104–1138. [CrossRef]
- Yan, F.; Xia, E.; Li, Z.; Zhou, Z. Sampling-Based Path Planning for High-Quality Aerial 3D Reconstruction of Urban Scenes. Remote Sensing 2021, 13. [CrossRef]
- Koch, T.; Körner, M.; Fraundorfer, F. Automatic and Semantically-Aware 3D UAV Flight Planning for Image-Based 3D Reconstruction. Remote Sensing 2019, 11. [CrossRef]
- Duan, P.; Wang, M.; Lei, Y.; Li, J. Research on Estimating Water Storage of Small Lake Based on Unmanned Aerial Vehicle 3D Model. Water Resources 2021, 48, 690–700. [CrossRef]
- Jo, Y.H.; Hong, S. Three-Dimensional Digital Documentation of Cultural Heritage Site Based on the Convergence of Terrestrial Laser Scanning and Unmanned Aerial Vehicle Photogrammetry. ISPRS International Journal of Geo-Information 2019, 8. [CrossRef]
- Papadopoulou, E.E.; Vasilakos, C.; Zouros, N.; Soulakellis, N. DEM-Based UAV Flight Planning for 3D Mapping of Geosites: The Case of Olympus Tectonic Window, Lesvos, Greece. ISPRS International Journal of Geo-Information 2021, 10. [CrossRef]
- Templin, T.; Popielarczyk, D. The Use of Low-Cost Unmanned Aerial Vehicles in the Process of Building Models for Cultural Tourism, 3D Web and Augmented/Mixed Reality Applications. Sensors 2020, 20. [CrossRef]
- Liang, H.; Li, W.; Zhang, Q.; Zhu, W.; Chen, D.; Liu, J.; Shu, T. Using unmanned aerial vehicle data to assess the three-dimension green quantity of urban green space: A case study in Shanghai, China. Landscape and Urban Planning 2017, 164, 81–90. [CrossRef]
- Whitehurst, D.and Friedman, B.K.K.S.V.W.J. Drone-based community assessment, planning, and disaster risk management for sustainable development. Applied Sciences 2021, 13. [CrossRef]
- Papadopoulou, E.E.; Papakonstantinou, A.; Zouros, N.; Soulakellis, N. Scale-variant flight planning for the creation of 3d geovisualization and augmented reality maps of geosites: The case of voulgaris gorge, lesvos, greece. Applied Sciences 2021, 11. [CrossRef]
- Soulakellis, N.; Vasilakos, C.and Chatzistamatis, S.K.D.T.G.P.E.E.P.A.R.O.K.T. Post-earthquake recovery phase monitoring and mapping based on uas data. ISPRS International Journal of Geo-Information 2020, 9. [CrossRef]
- Nagasawa, R.; Mas, E.; Moya, L.; Koshimura, S. Model-based analysis of multi-UAV path planning for surveying postdisaster building damage. Scientific Reports 2021, 11, 18588. [CrossRef]
- Girindran, R.; Boyd, D.S.; Rosser, J.; Vijayan, D.; Long, G.; Robinson, D. On the reliable generation of 3d city models from open data. Urban Science 2020, 4, 47. [CrossRef]
- Hamin Infield, E.; Shi, L.; Garcia, I.; Minner, J.; Goh, K.; Hsu, D.; J, A.; Boswell, M.; Stone, B.; Whittington, J. Planning for Climate Leadership 2023. Revised paper accepted with minor revisions at Journal of Planning Education and Research.
- Heisel, F.; McGranahan, J.; Ferdinando, J.; Dogan, T. High-resolution combined building stock and building energy modeling to evaluate whole-life carbon emissions and saving potentials at the building and urban scale. Resources, Conservation and Recycling 2022, 177, 106000. [CrossRef]
- Worth, G.; Fernandes, A.; Heisel, F.; Minner, J.; O’Malley, C. How Cities Can Stop Wasting Buildings: The Case for Deconstruction; Circular Construction and Circular Economy, 2022; pp. 32–37.
- Pantoja-Rosero, B.G.; Achanta, R.; Beyer, K. Damage-augmented digital twins towards the automated inspection of buildings. Automation in Construction 2023, 150, 104842. [CrossRef]
- Park, K.; Ewing, R. The usability of unmanned aerial vehicles (UAVs) for measuring park-based physical activity. Landscape and Urban Planning 2017, 167, 157–164. [CrossRef]
- Outay, F.; Mengash, H.A.; Adnan, M. Applications of unmanned aerial vehicle (UAV) in road safety, traffic and highway infrastructure management: Recent advances and challenges. Transportation Research Part A: Policy and Practice 2020, 141, 116–129. [CrossRef]
- Nelson, J.R.; Grubesic, T.H.; Wallace, D.; Chamberlain, A.W. The View from Above: A Survey of the Public’s Perception of Unmanned Aerial Vehicles and Privacy. Journal of Urban Technology 2019, 26, 83–105. [CrossRef]
- Watkins, S.; Burry, J.; Mohamed, A.; Marino, M.; Prudden, S.; Fisher, A.; Kloet, N.; Jakobi, T.; Clothier, R. Ten questions concerning the use of drones in urban environments. Building and Environment 2020, 167, 106458. [CrossRef]
- Kunovjanek, M.; Wankmüller, C. Containing the COVID-19 pandemic with drones - Feasibility of a drone enabled back-up transport system. Transport Policy 2021, 106, 141–152. [CrossRef]
- Sabino, H.; Almeida, R.V.; de Moraes, L.B.; da Silva, W.P.; Guerra, R.; Malcher, C.; Passos, D.; Passos, F.G. A systematic literature review on the main factors for public acceptance of drones. Technology in Society 2022, 71, 102097. [CrossRef]
- Hodgson, C.; Chang, K. Using drone technology to collect school transportation data. Travel Behaviour and Society 2023, 31, 1–9. [CrossRef]
- Grubesic, T.H.; Wallace, D.; Chamberlain, A.W.; Nelson, J.R. Using unmanned aerial systems (UAS) for remotely sensing physical disorder in neighborhoods. Landscape and Urban Planning 2018, 169, 148–159. [CrossRef]
- Fairley, I.; Williamson, B.J.; McIlvenny, J.; King, N.; Masters, I.; Lewis, M.; Neill, S.; Glasby, D.; Coles, D.; Powell, B.; Naylor, K.; Robinson, M.; Reeve, D.E. Drone-based large-scale particle image velocimetry applied to tidal stream energy resource assessment. Renewable Energy 2022, 196, 839–855. [CrossRef]
- Sziroczak, D.; Rohacs, D.; Rohacs, J. Review of using small UAV based meteorological measurements for road weather management. Progress in Aerospace Sciences 2022, 134, 100859. [CrossRef]
- Khan, M.A.; Ectors, W.; Bellemans, T.; Janssens, D.; Wets, G. UAV-Based Traffic Analysis: A Universal Guiding Framework Based on Literature Survey. Transportation Research Procedia 2017, 22, 541–550. "19th EURO Working Group on Transportation Meeting, EWGT2016, 5-7 September 2016, Istanbul, Turkey", . [CrossRef]
- Shao, H.; Song, P.; Mu, B.; Tian, G.; Chen, Q.; He, R.; Kim, G. Assessing city-scale green roof development potential using Unmanned Aerial Vehicle (UAV) imagery. Urban Forestry and Urban Greening 2021, 57, 126954. [CrossRef]
- Zhou, L.; Meng, R.; Tan, Y.; Lv, Z.; Zhao, Y.; Xu, B.; Zhao, F. Comparison of UAV-based LiDAR and digital aerial photogrammetry for measuring crown-level canopy height in the urban environment. Urban Forestry & Urban Greening 2022, 69, 127489. [CrossRef]
- Lyu, X.; Li, X.; Dang, D.; Dou, H.; Wang, K.; Lou, A. Unmanned Aerial Vehicle (UAV) Remote Sensing in Grassland Ecosystem Monitoring: A Systematic Review. Remote Sensing 2022, 14. [CrossRef]
- Drones · NYC311. Available online: https://portal.311.nyc.gov/article/?kanumber=KA-01541 (accessed 2023-01-08).
- FAA. Small unmanned aircraft systems (UAS) Regulations (Part 107). Available online: https://www.faa.gov/newsroom/small-unmanned-aircraft-systems-uas-regulations-part-107 (accessed 2023-01-10).
- Benchekroun, S.; Ullah, I.I.T. Preserving the Past for an Uncertain Future: Accessible, Low-Cost Methods for 3-D Data Creation, Processing, and Dissemination in Digital Cultural Heritage Preservation; Association for Computing Machinery: New York, NY, USA, 2022; Web3D ’21. [CrossRef]
- Buy dji mavic 3 series low-noise propellers—Dji store. Accessed: 10-01-2023, https://store.dji.com/product/dji-mavic-3-low-noise-propellers.
- Specs—Matrice 300 rtk—Dji enterprise. Accessed: 10-01-2023, https://enterprise.dji.com/matrice-300/photo.
- Griwodz, C.; Gasparini, S.; Calvet, L.; Gurdjos, P.; Castan, F.; Maujean, B.; De Lillo, G.; Lanthony, Y. AliceVision Meshroom: An open-source 3D reconstruction pipeline. Proceedings of the 12th ACM Multimedia Systems Conference 2021, p. 241–247. [CrossRef]
- Liu, S.; Bonelli, W.P.; Pietrzyk, P.; Bucksch, A. Comparison of open-source three-dimensional reconstruction pipelines for maize-root phenotyping. The Plant Phenome Journal 2023, 6(1), e20068. [CrossRef]
- Narazaki, Y.; Hoskere, V.; Chowdhary, G.; Spencer, B.F. Vision-based navigation planning for autonomous post-earthquake inspection of reinforced concrete railway viaducts using unmanned aerial vehicles. Automation in Construction 2022, 137, 104214. [CrossRef]
- Kim, H.; Narazaki, Y.; Spencer Jr., B.F. Automated bridge component recognition using close-range images from unmanned aerial vehicles. Engineering Structures 2022, 274, 115184. [CrossRef]
- Levine, N.M.; Narazaki, Y.; Spencer, B.F. Development of a building information model-guided post-earthquake building inspection framework using 3D synthetic environments. Earthquake Engineering and Engineering Vibration 2023, 22(2), 279–307. [CrossRef]
- Liu, B.; Tang, Y.; Ma, C.; Bai, S. Application of 3D modeling of UAV tilt photography in urban rain flood risk assessment. Bulletin of Surveying and Mapping 2019, pp. 46–50.
- Liu, P.; Ke, R.; He, W. Application of UAV Remote Sensing Technology in Smart City Construction. Intelligent City 2021, 7, 43–44.
- Quan, C. Discussion on the Application of UAV Oblique Photography 3D Model in Urban Planning. Intelligent City 2020, 6, 71–72. [CrossRef]
Figure 1.
Network visualization of co-occurrence of author keywords.
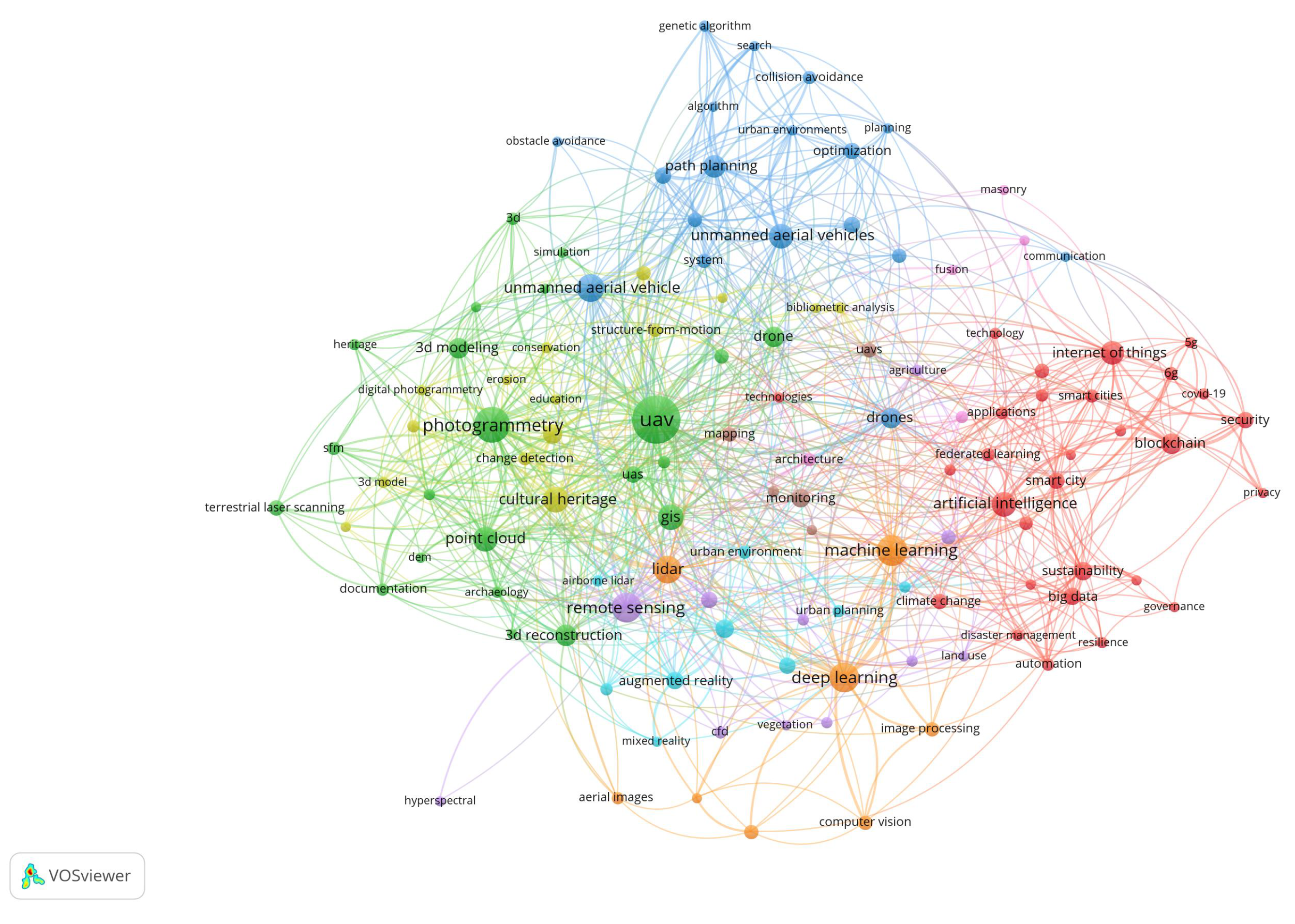
Figure 2.
Occurrences of keywords.
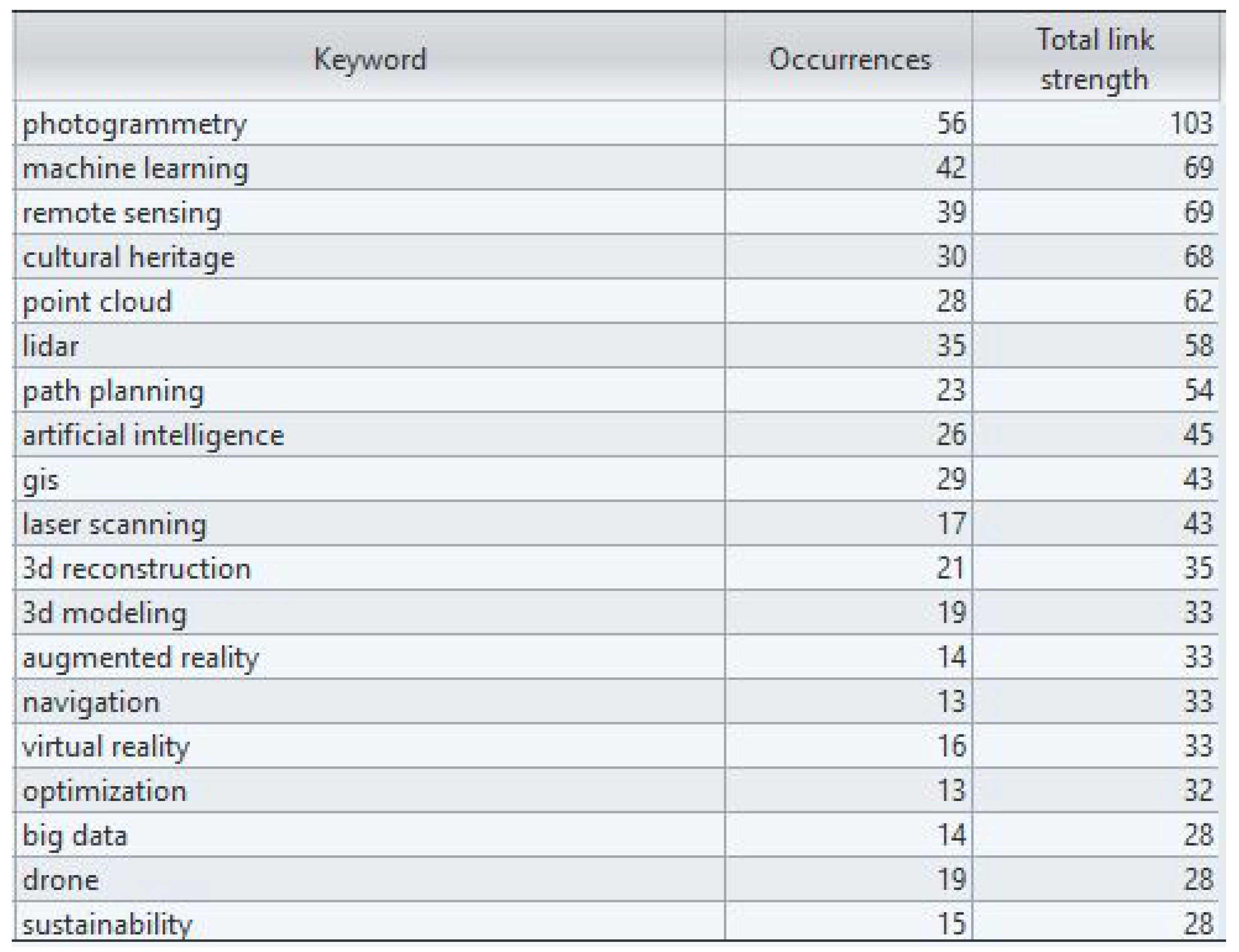
Figure 3.
Study selection process.
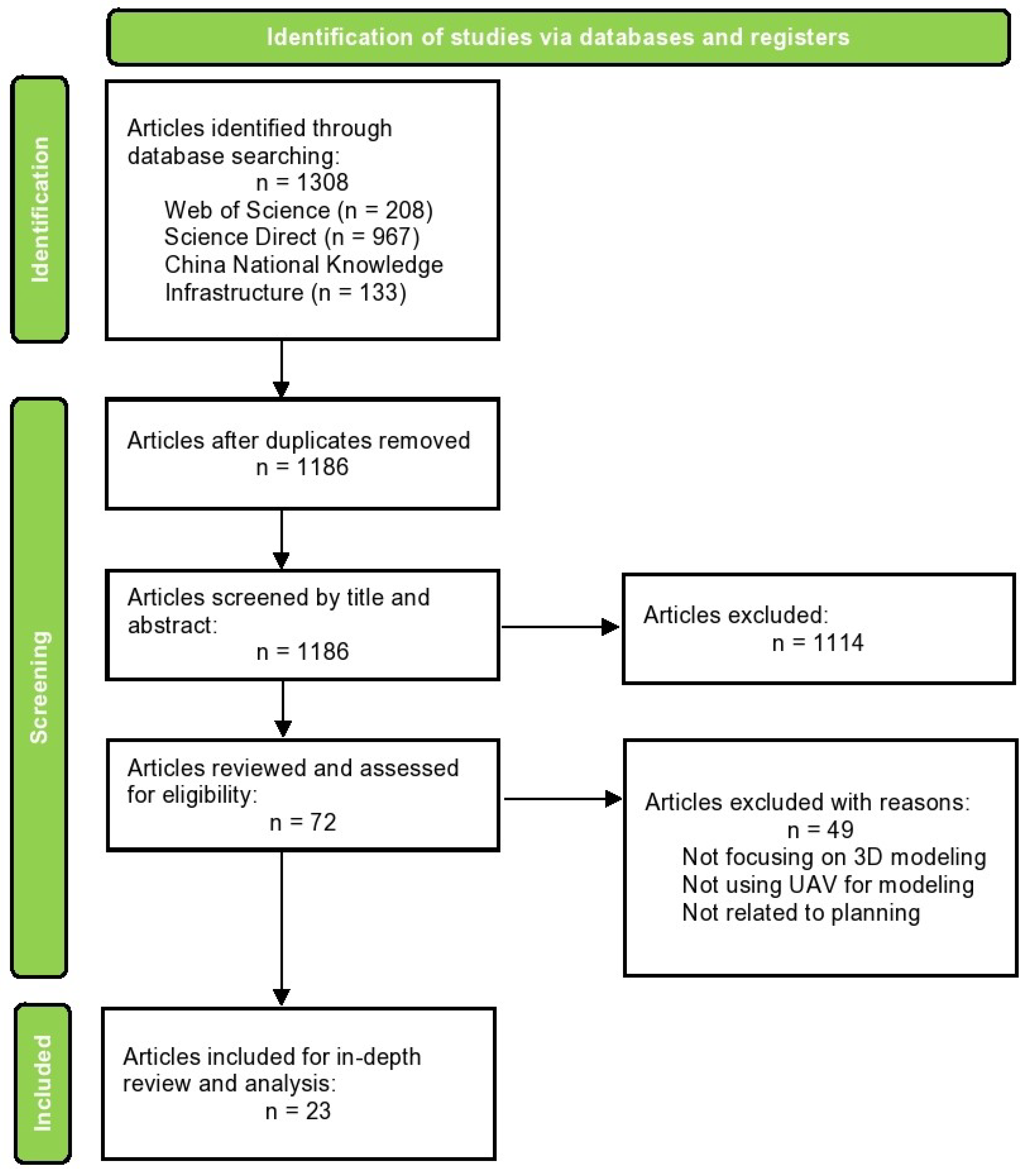

Table 1.
An overview of the existing planning literature on the use of UAVs in 3D modeling.
| Author | Findings | Implications for Future Work | Hardware | Software |
|---|---|---|---|---|
| Karachaliou et al., 2019 [38] | UAV-based photogrammetry is a cost-effective and efficient tool for mapping historic buildings and can produce results from high-quality 3D models to Building Information Models (BIM). | The authors suggest that using Building Information Modeling (BIM) can be beneficial in preserving historical buildings and propose that future research should concentrate on enhancing BIM-based documentation for heritage sites. | DJI Phantom 3 Pro | REVIT Autodesk, Agisoft PhotoScan |
| Li, 2018 [39] | Paper on UAV photogrammetry and its implications in urban planning: Oblique photogrammetry can significantly improve mapping accuracy, and has more intersection light than vertical photogrammetry, resulting in higher 3D model accuracy. | The potential of oblique photogrammetry in various areas such as spatial analysis, investigating illegal construction, assisting with planning approval, and safeguarding historical buildings requires further exploration through research. | NA | NA |
| Tariq et al., 2017 [40] | UAV photogrammetry can be used to develop realistic 3D models of archeological sites with high accuracy to preserve digital 3D models in the management system for future reconstruction of historical sites. | The application of photogrammetry in the management of historical sites can be further explored to make it a mainstream tool for archaeological conservation. | DJI Phantom 4, Sony A5100 | Photoscan |
| Berrett et al., 2021 [41] | Automated UAV techniques can be applied along with terrestrial photogrammetry to generate hyper-realistic 3D models, which can be used for large-scale university campus planning and historic preservation and public outreach, as well as potential virtual reality (VR) and augmented reality (AR) tours. | The application of advanced technologies like LiDAR in generating 3D models can be further explored to improve accuracy and generate more realistic representations of real-world environments. | DJI Phantom 4 RTK, Inspire 2 with Zenmuse X4S, Nikon D750, Canon EOS 5D Mark III, TOPCON GR-3 GPS unit | Lightroom, ArcGIS Pro, 3D Acute |
| Kikuchi et al., 2022 [21] | Augmented reality combined with drones can facilitate public participation in urban design decision-making processes through implementing detailed 3D models of the city (digital twins), which can achieve both first-person and overhead views in outdoor AR with occlusion handling. | There is potential for further exploration of the use of augmented reality in urban planning and design, particularly in enhancing public participation during the decision-making process. | DJI Mavic Mini | SketchUp Make, InfraWorks, OBS Studio for AR |
| Erenoglu et al., 2018 [42] | UAV-assisted 3D modeling can be a time-efficient and cost-effective approach for urban planning and can be used for mapping damages safely and efficiently after natural hazards. | Further research is needed to optimize processing parameters, such as camera characteristics, image scale, quality of imagery, and hardware capacity, to improve the accuracy of UAV-assisted 3D modeling. | Mikrocopter XL 8, Canon EOS-M, Satlab Sl500 GPS, Kolida KTS-442 RLC station | Agisoft Photoscan, ArcMap |
| Zhang et al., 2022 [43] | The use of a telexistence drone system empowered with artificial intelligence and virtual reality can achieve real-time 3D reconstruction with high-quality results. | Further exploration is required to determine the practical applications of the telexistence drone system in data analysis and decision-making. Additionally, efforts can be made to reduce the latency caused by different components of the system to improve its overall performance. | MYNT AI D1000-50/Color stereo camera, ICP Tracker | Agisoft PhotoScan |
| Campbell, 2018 [44] | Drone photogrammetry and VR are effective tools for historic preservation efforts and can provide new data and experiences for decision-making, VR experiences generated were positively received by government officials and other professionals. | Applying photogrammetry and VR to other preservation efforts of culturally significant artifacts. Developing and refining best practices for photogrammetry and VR workflow in preservation efforts. | DJI Phantom 4 Pro, Canon EOS Rebel DSLR | Autodesk (Recap Photo, 3ds Max), 3DR Site Scan, Visualive3D Mobilive, Geotag Photos, Trimble SketchUp |
| Alsadik et al., 2013 [15] | The proposed automated camera network method for 3D modeling of cultural heritage objects showed improved accuracy and average coverage with a significant reduction in the number of cameras required. | The image orientation steps required for obtaining high-resolution images need improvement in the future, and more reliable bundle adjustment can be achieved by using the sparse bundle adjustment package. | NA | Agisoft Photoscan, Microsoft Photosynth |
| Skondras et al., 2022 [45] | UAV can fly in urban areas that airplane cannot operate and produce high-resolution 3D modeling, thus the use of UAV is expected to increase in the future. | Future studies could investigate the integration of data obtained from the built environment with local spatial knowledge, and the creation of geo-referenced and scaled models. | DJI Phantom 4 Pro | Pix4D Capture and Mapper, Blender |
| Xu et al., 2016 [46] | Using a minimum spanning tree to construct scene correlation network can reduce the computational cost of image matching in Structure from Motion (SfM) for 3D scene reconstruction from UAV images while preserving the accuracy and completeness of the final scene geometry. | The computation required for large volumes of images in Structure from Motion (SfM) based methods for 3D scene reconstruction has increased significantly. Future work is needed during the image matching phase, which is among the most time-consuming stages of SfM methods. | Fixed-wing UAV, Canon EOS 5D mark II | Pix4Dmapper, PhotoScan, Micmac |
| Ferworn et al., 2011 [47] | Commercial off-the-shelf hardware can be used to create a system that aids in disaster response efforts by allowing for aerial surveying and the creation of 3D models. | Develop a more autonomous system, improve data quality and consistency, and create real-time, onboard point cloud modeling to immediately direct search and rescue efforts. | MK Hexakopter 2 | Microsoft Kinect video game peripheral |
| Gatziolis et al., 2015 [14] | GPS-enabled UAVs can be used for precise scaling of reconstructed tree point clouds. Higher image overlap does not significantly improve the accuracy or completeness of tree reconstructions. | Further research is needed for navigation precision in confined areas and obstacle avoidance in forested environments. | APM: Copter, Custom built DJI f550 UAV hexacopter | Mission Planner |
| Mohd Noor et al., 2020 [48] | The integration of MLS and UAV data can produce high-quality 3D models of building structures for cultural heritage purposes based on results of Malay cities. | Expansion of the MLS approach to capture other elements of the urban environment such as vegetation, infrastructure, and natural features. | DJI Phantom 3, Topcon IP-S3 HD laser scanner | Agisoft PhotoScan, ESRI City Engine |
| Manajitprasert et al., 2019 [49] | The study found that the UAV-SfM approach is an effective and accurate tool for modeling 3D cultural heritage after conducting a case study in Thailand. | Subsequent research could explore the incorporation of oblique images to identify and document minute details, thereby enhancing the effectiveness and precision of this technique as a substitute for laser scanning. | DJI Inspire 1 Pro, Riegl LMS-Z210 scanner | Pix4D, CloudCompare |
| Remondino, 2011 [50] | The authors found that 3D modeling and scanning technology significantly contributed to the documentation, conservation, and presentation of heritage information. | Developing new algorithms and methodologies to improve the 3D restitution pipeline, increase data storage, and improve the accessibility of geospatial data to non-expert users. | Helicopter, SLR camera | 3D Studio Max, Maya, Sketchup, Blender |
| Yan et al., 2021 [51] | Using the optimized trajectory can significantly improve the performance and quality of aerial 3D urban reconstruction. | Future work may focus on further improving the efficiency and accuracy of the proposed method and extending it to other types of scenes. | DJI Phantom 4 Pro | Unreal4, COLMAP |
| Koch et al., 2019 [52] | An automatic 3D UAV flight framework can generate high-quality 3D models while ensuring safe flight paths in complex and densely built environments. | Future research could encompass a more flexible strategy for viewpoint placement, which includes multiple orientations for each camera viewpoint, while also taking into account the material of individual object parts. | DJI Mavic Pro 2 | Pix4D, Blender |
| Duan et al., 2021 [53] | Using UAV data to generate a real 3D model and extract the lake boundary enables an accurate representation of the lake’s actual scene. | Future work can explore the potential of automatic driving technology in lake estimation. | DJI Phantom 4 Pro, Huawei no. 3/Apache 3 | Bentley Context Capture Center 4.4, DP-Modeler 2.3 |
| Jo and Hong, 2019 [54] | Combining terrestrial laser scanning and UAV photogrammetry into a hybrid technology can enhance the reliability and applicability of 3D digital documentation and spatial analysis for cultural heritage sites. | Further investigation is required to decrease positional inconsistencies between the two survey technologies and to assess how they vary depending on various scales and geomorphic environments. | Leica Aibot X6, Sony Alpha 6000, Trimble R6 Model 3 | Agisoft PhotoScan Profesional Edition |
| Papadopoulou et al., 2021 [55] | Using a digital elevation model (DEM) as a source of information for designing UAV flight plans tailored to the topography of each geosite can offer significant advantages over conventional image collection methods. | Subsequent research can focus on developing a fully automated algorithm based on the DEM of the study area. | DJI Phantom 4 Pro | AgiSoft Metashape Professional Edition, ESRI ArcMap, CloudCompare |
| Templin and Popielarczyk, 2020 [56] | UAV-based photogrammetry is a cost-effective and efficient approach for accurately scanning, surveying, and capturing reality in 3D when documenting cultural heritage. | Future work includes exploring the possibilities of using higher resolution cameras for better results. | DJI Phantom 4 PRO, Sony RX100 II, Leica ScanStation C10 | CloudCompare, AgiSoft Metashape Professional Edition, Cyclone |
| Liang et al., 2017 [57] | The study found that UAV 3D modeling with high-resolution RS data can accurately calculate the three-dimension green quantity (3DGQ) of urban green spaces after conducting a case study in China. | Future work should include more time points to improve accuracy and use 3DGQ in urban green space design and planning. | Zero UAV YS09 | Pix4D |
Table 2.
Major limitations of UAV 3D modeling for planning.
| Type | Limitation |
|---|---|
| Policy | |
| Environment | |
| Disciplinary |
|
| Hardware | |
| Software |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



