
Submitted:
17 October 2023
Posted:
17 October 2023
You are already at the latest version
Abstract
After reviewing the history of the struggle between human beings and plant diseases, insects and weeds, especially reviewing the thoughts of plant protection in ancient Chinese agricultural books, the target recognition of plant pests and the six types of plant protection methods and 36 subdi-vision measures were summarized. Then the development overview of pesticide application technology was focused and reviewed systematically by combining the development timeline of pesticide application and the key technologies including the performance measurement and the simulation and modeling of pesticide spraying system. And three suggestions for further research were proposed from the perspectives of human-being and environmental health, the sustainable and eco-friendly application medium, and the efficiently application equipment system in plant protection.
Keywords:
review
; Chinese ancient thoughts on plant protection
; plant protection methods and subdivision measures
; pesticide application technology
; 3R/3E/3M
; pesticide spraying
; measurement and simulation
; robot for plant protection
1. Introduction
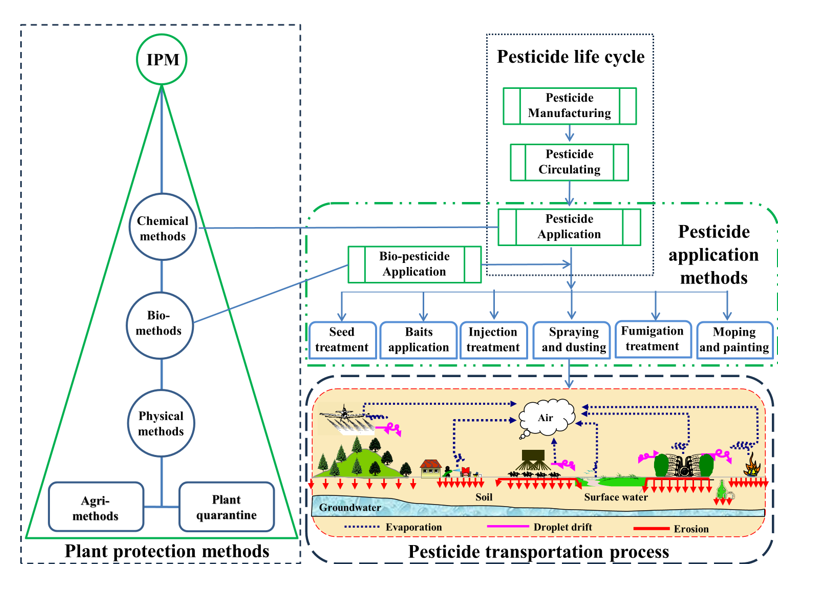
Plants and their environment are geared to a generalized natural ecosystem with several relationships, such as individual plants and the overall ecosystem, macro ecological effects and micro plant species, plant symbiosis and allelopathy, and so on. Plants capture solar energy through photosynthesis to produce organic matters, following the principle of “natural selection and survival of the fittest”. During the growth process, plants are subjected to long-term biotic stresses of diseases, insects, weeds, rats (and rabbits), as well as abiotic stresses of droughts, floods, frost and freezing, and salinization of soil, which cause significant changes in the skeleton structure and function of complex plant ecosystems and often accompany the secondary disasters. There are about 10000 species of insects, 1800 species of weeds, 1500 species of plant diseases, 1500 species of plant viruses, and some rodents to danger the plants in the earth. These large number of plant pests and other heterotrophic organisms obtain nutrients and reproduce through harming plants, and achieve dynamic balance in long-term natural selection. More than 2200 years ago, the book “Master Lü’s Spring and Autumn Annals•Buqu” had stated that “Farmers kill the locusts because of harming the grain.” Table 1 lists the ancient agricultural books of the Chinese Nation cited in the paper for references. Over thousands of years, the history of human survival and development is accompanied by the struggle against plant pests, among which plant target recognition, plant protection methods, and plant protection machinery constitute the three elements of plant protection. The world including China has enriched plant protection practices, and developed six types of plant protection methods, including agricultural method, physical method, biological method, chemical method, plant quarantine, and integrated pest management(IPM)[1]. Based on the diagram of the relationship between the pyramid of plant protection methods and pesticide application technologies shown in Figure 1, the objectives of this paper were to summarize the plant protection targets recognition, review the development of plant protection methods, then review and summarize the pesticide application technologies, the pesticide spraying process and the key technologies, finally put forward some suggestions.
2. Targets Recognition for Plant Protection
In order to achieve the timely plant protection and carry out the precision prevention and control of harmful pests, it is necessary to understand the controlling targets of harmful pests. About 3000 years ago, “The Book of Songs•Xiaoya•Datian” (Table 1) began a preliminary classification of agricultural pests based on the parts of crops damaged by pests which stated that “To get rid of the borer insects, the leaf eating insects, the root eating insects and the seedling stem eating insects, then the pests will be no harm to our fields”. In Chinese among them, the borer insect is called the word “Ming”, the leaf eating insect is called the word “Teng”, the root eating insect is called the word “Mao”, and the seedling stem eating insect is called the word “Zei”. About 400 years ago, the book “Shen's Treatise on Agriculture·Land Administration Rules” (Table 1) stated that “the mulberry white caterpillars must be scraped off three times: the first time in winter and spring, the second time before the Qingming Festival, and the third time after pruning the mulberry leaves.... It is also necessary to pinch the insects first in June and second in July, and the insects should be carefully examined.” “If one mulberry white caterpillar is left, then there will be a hundred insects, and this is the most difficult and laborious task for farmers to verify.” This indicates that removing mulberry white caterpillars requires identifying the insects and scraping off the insect eggs.
According to the varying characteristics of the damaged plants by pests, the application practices of prevention and control of plant pests were divided into the direct targets and the indirect targets[2]. The direct targets refer to the pests that directly harm plants, including four categories, that is, plant diseases, plant insects, rats (and rabbits) , and harmful plants. The indirect targets refer to entire individual plant or regional community plants that are threatened by plant pests.
2.1. Plant Diseases
Plant diseases are the phenomenon of physiological and biochemical reactions that occur in plants under some biotic or abiotic stresses, causing gradual damages to physiological functions of the plant cells and tissues, and hindering the growth and development of plants. The main recognition means for plant diseases include the detection of plant infectious diseases through molecular biology technologies[3], such as PCR(Polymerase Chain Reaction)[4], LAMP (Loop-mediated isothermal amplification, LAMP)[5], DNA microarray[3], CRISPR/Cas (Clustered regularly interspaced short palindromic repeats/CRISPR-associated protein, CRISPR/Cas)[6], and through the measuring spectral response features of plants by multispectral imaging[7] and the detection of root diseases by ground penetrating radar[8].
2.2. Plant Insects
The harmful modes of plant insects are closely related to their morphological structure, growth and development patterns, and living habits, which are mainly divided into biting, sucking, boring, leaf-mining, and root-harming of plants, such as leaf pests, trunk borers, cone and seed pests, underground pests etc.. The main recognition means for plant insects include the field microscopic examination[9], chemical regulation and trapping[10], machine vision and acoustic sensing[11,12], etc..
2.3. Rats and Rabbits
Rats are omnivorous animals that bite into trees, young seedlings, and damage the roots of seedlings. Rabbits like to eat grass and plant leaves, and directly gnaw on the stems of seedlings. The main recognition means for the harm rats and rabbits include the monitoring of rats damage by remote sensing[13], the field observation of rabbits damage[14], the monitoring of rats or rabbits damage by infrared camera[15], etc..
2.4. Harmful Plants
Harmful plants include four major types, the parasitic seed plants, the climbing, winning and covering plants, the exclusion plants, and the weeds. The main recognition means for harmful plants include mainly the acquiring harmful plants images and identifying them according to the characteristics of reflection spectrum[16,17].
2.5. Indirect Targets
Generally, the damaged area of the direct targets by harmful pests is very small, so the entire individual plant with partially damaged area or the regional community with damaged plants will be used as the operation target in the prevention and control of harmful pests for facilitating the practice of the operations, that is, entire individual plant or regional community plants will be recognized as the indirect targets. The main recognition means for the indirect targets include using machine vision[18], satellite remote sensing[19], LiDAR[], etc.. The classification and field experiment assessment of the ramularia blight infection levels of cotton leaves were conducted through a UAV system[21].
3. Development of Plant Protection Methods
The practices of plant protection have gone through three stages: the naturally-farming-based stage, the pesticide-priority-based stage, and the integrated-management-based stage[16]. A lot of different plant protection methods have emerged[1,16]. Each plant protection method summarized in Figure 1 is further subdivided into 6 measures and the total 36 measures are classified, as shown in Figure 2.
3.1. Agricultural Practice Methods
The ancient Chinese thoughts on plant protection through agricultural practice methods can be found from agricultural works of the Chinese Nation, especially the four immense ancient agricultural books which are “Works of Fan Shengzhi” written in more than 2000 years ago, “Important Arts for the Peoples Welfare” written in about 1500 years ago, “Book on Agriculture” written in about 630 years ago and “Complete Treatise on Agriculture” written in about 380 years ago(Table 1). By analyzing these literature records and the recent development trend of plant protection around the world, the agricultural practice methods of plant protection were summarized into six measures, that is the row intercropping to defeat the pests, the crop rotation, the management of soil moisture and fertility, the trimming and bridge-grafting, the seed and seedling cultivation treatments, and the field ecological construction(Figure 2).
3.1.1. Row Intercropping to Defeat the Pests
Row intercropping refers to the diversification of planting time and space based on the row intercropping, including the fallow cultivation, which can effectively prevent the outbreak of plant pests. Even in the outbreak of plant pests, partial losses can be avoided due to different habits and growth periods of different crops. About 1500 yeas ago, the book “Important Arts for the Peoples Welfare” stated that “Planting mung beans or adzuki beans under the mulberry trees not only enhances the good harvesting of the two beans, but nourishes and benefits the mulberry trees”. And about 380 years ago, the book “Complete Treatise on Agriculture” introduced the intercropping between Chinese fir and crops(Table 1). American biologist Rachel Carson believed that planting a grain on a large scale provides conditions for a sharp increase in the number of certain insects, and she stated that “obviously then, an insect that lives on wheat can build up its population to much higher levels on a farm devoted to wheat than on one in which wheat is intermingled with other crops to which the insect is not adapted”[22].
3.1.2. Crops Rotation
Due to the continuous cropping as an acknowledged risk for bringing out the plant pests, most crops require rotation. A reasonable crop rotation refers to the rotating practice of host crops that are susceptible to plant pests with non-host and resistant crops, including the certain rotation of terrestrial plants and aquatic plants, which can reduce the number of the pathogenic bacteria or insect eggs in the soil. Crops rotation can also eliminate accompanying weeds or parasitic weeds, and restrain weeds harm. About 380 years ago, the book “Complete Treatise on Agriculture” stated that “if the mountainous region can be planted, then planting millet in summer and wheat in winter can be used as a hoe for weeding” and “For those who raise their fields high and can grow cotton or rice, planting cotton for two years and plowing rice for one year. Then the weeds roots will rot, the soil fertility will increase, and the pests will not grow. You do not plant cotton for more than three years, otherwise pests will grow” (Table 1). Rational application decisions of crop rotation patterns can minimize the yield loss in infected fields[23].
3.1.3. Managing Soil Moisture and Fertility
The specific conditions of rain, damp, cold and heat in the field are the main direct reasons for the occurrence of plant pests, that is, an appropriate management of soil moisture and fertility can effectively prevent the occurrence of plant pests. About 300 years ago, the book “Outlines of Agriculture•Principles of Cultivating Crops” stated that “Five types of insects all occur as the results of the rain and dampness, the diurnal dryness, and the fumigation of cold and heat”. About 380 years ago, the book “On Agriculture” stated that “If five types of pests were not controlled, then plant crops would not grow. Those who irrigate the fields must first cover the fields with water for collecting the heat, and quickly remove water. Then, using new water to cover the fields will result in no harm to plant crops”. Even in about 2000 years ago, the book “Discourses Weighed in Balance” stated that “Insects live by warmth and humidity” and “If the grain is dry, the insects do not live; if it is warm and wet, the insects can't help but grow” (Table 1).
3.1.4. Trimming and Bridge-Grafting
When the branches and roots of trees suffered from plant pests (including the accidentally damages by freezing, burning, gnawing, and improper fertilizer application, plant girdling or reverse grafting etc.), the tree bark can rot or leave major wounded scars which cause the conducting tissue of the tree cortex to be cut off and nutrient delivery to be blocked. Then the normal growth of the tree will be affected and the tree gradually weaken. In severe cases, it can cause pruning or withering of the entire tree. Generally, it is necessary to avoid the wound caused by agricultural operations, and reduce the opportunity for pathogens to invade from wounds. For the wounded tree, the timely trimming wound branches is suggested to treat pests and prevent diseases. Especially the bridge grafting technology used for treating the wounded trees appears to be a feasible process to reconstruct the conducting tissues and reconnect the nutrient delivery tissues for re-establishing the interrupted sap flow and restoring the flow of sucrose from the canopies of the trees to the root systems. Combined with comprehensive measures by keeping reasonable water and fertilizer management, pruning branches to reduce load, the tree vigor will be strengthened and the tree age will extend. Then it may be able to save trees rather than replace them[24].
3.1.5. Seed and Seedling Treatments
Seed and seedling cultivation treatments refer to the selection of early maturing and pests free varieties through long-term planting experiences to prevent the plant pests harm. Seed breeding treatments apply biological, physical, chemical and other technologies to protect seeds, control pests and diseases, and ensuretable normal crop growth. More than 2000 years ago,“The Book of Fan Shengzhi”introduced some principles and techniques for selecting and reserving good seed varieties and stated that “A handful of wheat seed and a handful of Chinese mugwort are stored in the earthen ware or stone tools, then the doubling harvest will be achieved when timely sowing” according to the thoughts that “If the mother is strong, the child will be good, and if the mother is weak, the child will be sick” (Table 1). This is because the volatile aromatic oil in mugwort leaves has insecticidal and sterilization effects. The seed coating treatment using nanomaterials, specifically nanoparticles and nanofibers which offer significant benefits in boosting the seed mechanical properties, germination and vigor index by enhancing seed water uptake, and nutrient absorption due to their permeability, small size and high surface area[25].
3.1.6. Field ecological construction
Field ecological construction includes more plowing and fine hoeing, and field environmental remediation, etc. More plowing and fine hoeing refers to investing a large amount of production materials, labors, and related technologies, and enhancing the soil fertility through meticulous deep plowing operations with the diligent labors. More than 2200 years ago, the book “Master Lü’s Spring and Autumn Annals•Rendi” contains “The ridge in the upper field and the ditch in the lower field must be abandoned; Five times of plowing and hoeing must be finished and thoroughly examined before seeding; The deep cultivation should reach the moisture content in the lower layer of the field soil, then the growth of large weeds or insects could be avoided”. This means that the deep plowing is very important for controlling plant pests, especially it is necessary to plow and hoe carefully and thoroughly before sowing. Field environmental remediation (field ecology) refers to the improvement of the field environment through cleaning the fields, disinfection of soil exposed to sunlight, etc., effectively reducing the breeding areas of bacteria and pests, especially reducing the source of overwintering pests. About 1500 years ago, the book “Important Arts for the Peoples Welfare” stated the procedure of field ecological construction to kill the insects, that is, “The shoveling is the best way to raise seedlings which is better than ploughing and hoeing. The shovel handle is about 66.67 cm long and the blade is about 6.67cm wide, used for soil cutting and weeding. When winter rain and snow come to an end, the snow could be covered and trampled on the ground and not let it fly away with the wind; the snow is trampled and covered again if the snow come again. So the land will be protected in the spring, and the insects will be frozen and die. Then the next year will be suitable for crops” (Table 1).
3.2. Physical Methods
Physical methods mainly utilize principles and measures such as mechanical, electromagnetic, heat treatment, and radiation to kill harmful pests or control their harm. The six measures of physical methods are categorized, that is, mechanical measures to control pests, trapping and killing insects through insect behavior, barrier isolation of pests, electromagnetic control of pests, intense heat treatment of pests, and radiation suppression and killing of pests (Figure 2).
3.2.1. Mechanical Measures to Control Pests
Mechanical measures to control pests include manual operation, mechanical suction, sound-induced control, ultrasonic control, mechanical weeding, and the combination measures. The manual operation is the most environment-friendly but also the most arduous measure of pests control. About 750 years ago, an emperor of the Song Dynasty issued the world's first law on locust control (Table 1), which required county officials to personally capture locusts in areas where locusts were rampant. According to the law, people who excavate locusts and catch locusts can directly exchange locusts for money and foods. The pneumatic sucking and capturing machine and photoelectric trapping machine could be developed for nontoxic locust control[26]. The sound-induced control of pests is the measure using a simulation or recording of insect chirping and other sounds played in the field to concentrate the capture of harmful pests, or using related sounds to deter, expel the harmful pests[27]. The ultrasound control uses a mechanical wave with a frequency higher than 2000Hz and the ultrasound stress effect can affect the activities of acetylcholinesterase(AChE), feeding behavior, and location distribution of plant pests for controlling the pests harm[28]. The mechanical weeding generally uses rollers, harrows, shovels, hoes, etc. to carry out weeding between plants and rows. About 630 years ago, “Book on Agricultureby Wang Zhen” stated that “Protecting seedlings like nurturing sages, eliminating weeds like attacking bandits with extreme force”. The intelligent inter plant weeds control technology was applied and laser weeding robot was developed in recent years[29,30]. Of course, more and more mechanical measures or combinations with other measures could be developed for plant pests control.
3.2.2. Trapping/Killing Insects via Insect Behaviors
Trapping and killing insects through insect behaviors refers to using temptation means of light, color plates, baits, and habitats to attract the plant pests according to their certain animal tendencies (such as light, wave, color, taste, etc.) or other characteristics (such as hiding, laying eggs, overwintering, etc.) for meeting the environmental conditions. The plant pests could be lured to physical devices such as pre-hidden traps, water pits, or high-voltage power grids, to cut off the escape ways of plant pests, and cooperate with certain chemical agents or manual treatments to prevent and control harmful plant pests. Among them, the measure of light trapping and killing insects is based on the insects' phototaxis instinct, using black light lamps, frequency oscillation lamps, low energy LED lamps, dual-color lamps, or high-pressure mercury lamps to monitor and control plant pests[31].
3.2.3. Barrier Isolation of Pests
Barrier isolation of pests refers to the establishment of physical barriers to forcibly isolate plant pests, or the use of tempting attacks or forced driving to attract plant pests away from their habitats that rely on survival, to prevent the spread of harmful plants. The measures for the barrier isolation of pests include building arched rain shelters, bagging fruits, banking up with earth, digging blockage ditches, coating white glue, using fly nets[32], spraying high fat membrane, and covering slippery wax etc. Possible biomimetic strategies were studied to repel insects or reduce the adhesion of crawling insects to the target plants, such as the slippery wax-covered plant surfaces, the insect-repellent coatings with natural products[33].
3.2.4. Electromagnetic Control of Pests
Electromagnetic control of plant pests is mainly aimed at the biophysical (especially bio-electrical) characteristics of plant diseases, insects, and weeds. High-voltage electric fields, short-term electric pulses or ultra-high frequency electromagnetic field pulses are applied to quickly destroy biological tissues and harmlessly control harmful plant pests, such as , the measures of electric shock[34] or magnetic control[35].
3.2.5. Intense Heat Treatment of Pests
Intense heat treatment of pests mainly refers to the use of technologies such as steam disinfection, hot water disinfection, circulation disinfection, flame disinfection, and comprehensive disinfection, that is, using heat transfer media of light, humid air, hot water, steam, and far-infrared heating to transmit sufficient heat to diseased plants, and to cause bacterial inactivation or even death without affecting normal plant growth. Using fire to control plant pests has existed since ancient times. About 1500 years ago, the book “Important Arts for the Peoples Welfare” stated that “The method of drying wheat is suitable for harvesting in the burning sun”(Table 1). Steam disinfection is the use of high-pressure dense steam to improve soil drainage and permeability, killing pathogenic organisms in the soil. The indoor and field steam treatment system was developed which consists of enclosure, circumstance temperature monitoring system, outer and inner bark temperature testing system[36]. Far-infrared heat treatment can prevent and control citrus Huanglongbing (HLB) which consists of heat treatment enclosure, far-infrared lamp groups, temperature recorder and sensors[37].
3.2.6. Radiation Suppression and Killing of Pests
The measures of radiation suppression and killing of pests mainly utilizes the electromagnetic radiation energy generated by periodic changes in electric and magnetic fields and transmitted through space to suppress or slow down the growth of harmful pests. All the electromagnetic radiation from low to high frequencies has been developed and has the potential to be developed for plant pests control, including radio waves (RF)[38], microwaves[39,40], infrared rays, visible light[41], ultraviolet rays, X-rays, and γ radiation[42], etc.
3.3. Bio-Methods
Biological control methods mainly utilize the inter species relationships between natural organisms, as well as the information (such as physical, chemical, behavioral etc.) in ecosystem and genetic engineering, to control harmful pests, such as plant pathogens, insects, and weeds, by restraining one or more organisms while protecting beneficial biological populations. Six measures are summarized, including natural enemy predating, natural enemy parasitizing, bio-pesticides application, plant immunization, pheromone interference, gene-driven operation, etc. (Figure 2).
3.3.1. Natural Enemy Predating
The suitable environments and good facilities could be created to protect the local natural enemy insects of plant pests, and improve the predatory ability of natural enemies to prey on plant pests for the healthy growth of crops. The predatory natural enemies consist of two types of predatory arthropods and chordates. The predatory arthropods include lacewings, ladybugs, ants, dragonflies, ground beetles, mantis, robber flies, syrphid flies, predatory mites and other insects, as well as spiders. The predatory chordates include insectivorous birds, mammals and amphibious animals. More than 1600 years ago, the "Book of Southern Vegetation" stated that “If there were no such ants in the southern citrus trees, the fruits of the citrus trees would be bitten by insects, and there would be no complete fruit”. The mentioned ants, yellow ants, could protect southern citrus trees from the damage of group beetles and the insect control performance of the yellow ants depends on the collective strength of the ants, so the yellow ants were sold together in the nest. Over 1400 years ago, the book “Biographies in the Southern Dynasties” recorded that there were birds eating locusts and stated that “In the field when autumn falls, a thousand groups of birds suddenly arrive and the locusts disappear in the twinkling of an eye”. During the Song Dynasty of about 750 years ago, it is said that there was a record of “Frogs can feed on insects and catching frogs must be banned” (Table 1).
3.3.2. Natural Enemy Parasitizing
The parasitic natural enemies, including the parasitic natural enemy insects such as parasitic wasps, parasitic flies etc., and the parasitic pathogenic nematodes such as nematodes, protozoa and microsporidia, can kill the host pests by specifically parasitizing themselves inside or outside the host pests' bodies. The parasitic natural enemies(such as trichogramma) can be released in appropriate positions through manual, mechanical operations, gyroplane and unmanned aerial vehicles, and there are also applications where trichogramma pupae can be dispersed into aqueous solutions for foliar spraying[43,44,45].
3.3.3. Bio-Pesticides Application
Bio-pesticides refer to the formulations that use living organisms and active substances produced by biological metabolic processes to control the harmful pests. Bio-pesticides include microbial pesticides, botanical pesticides, mineral derived pesticides, and biochemical pesticides etc.. The botanical and mineral derived pesticides had been used to control plant diseases and pests for a long time. About 2700 years ago, the book of “Zhou Rites” recorded various methods of using bio-pesticides to treat pests such as “using coir lotus to fumigate the pests” and “using the illicium anisatum to fumigate the pests”. In the book “Zheng Xuan's Annotation for the Zhou Rites” written in about 2000 years ago, it was said that the illicium anisatum have the effect of killing insects with fumigating. About 600 years ago, the book “Complete Treatise on Agriculture” recorded that “The method of controlling pests in the nearby fields is mostly to use lime and tung oil on the leaves kill the pests” (Table1). Microbial pesticides, such as bacteria, fungi, viruses and other agents, are mainly sprayed to control plant pests. The entomopathogenic fungi can be used as endophytism, plant disease antagonism, plant growth promotion, and rhizosphere colonization to play ecological roles of microbial control agents against insect pests and plant pathogen pests[46]. Certainly, biological activity needs to be protected during bio-pesticides application because the flow of the biological pest control agent through an abrupt contraction could hydrodynamically damage the entomopathogenic nematodes[47]. There exists a linear relationship between the spherical⁃top of a flat⁃fan nozzle orifice structure and the viability of microbial pesticides[48].
3.3.4. Plant Immunization
A plant virus vaccine (plant immunity inducer) can activate or prime plant immunity. Plant immunization refers to the resistant substances produced by exogenous organisms or molecules through induction or activation of plants, which produce resistance to certain pathogens or inhibit the growth of pathogens, and have the functions of inhibiting viruses and protecting plants. Plant immunity inducer, composed of active and beneficial microorganisms that conform to cultivation, can damage crop virus tissue which can be derived from animals, plants, microbes or their metabolites, active molecules produced during interactions between plants and microbes, or natural/synthetic compounds. The identification of these compounds has accumulated considerable resources for the development of plant immune-induced pesticides. After application, beneficial bacteria multiply in large numbers, forming a protective film around the crop, inhibiting bacteria and virus synthesis[49].
3.3.5. Pheromone Interference
The principle of pheromone interference prevention and control is to use sex pheromones, aggregation pheromones, alarm pheromones, trace pheromones, dispersal pheromones, as well as queen pheromones, nasonov pheromones, etc. to interfere or block the transmission of information between harmful pests [50,51]. The slow-release pheromone sun-shading and insects-prevention nets were equipped through the loading process of the generalized pheromone modification without changing the production process of ordinary sun-shading nets, which slowly releases pheromones under the ultraviolet driving, controlling the plant pests from outside and inside the nets[52].
3.3.6. Gene-Driven Operation
By using gene-driven editing, the genes of diseases and insects can be knocked out through knockout, modification, replacement or insert healthy genes into the plant genome, then plants can directly develop the resistance against the diseases and insects. RNA interference technology can be used to target the specific genes that play a crucial role in the growth and development of plant pests or important physiological processes. It introduces the artificially synthesized exogenous double-stranded RNA into the body of plant pests to silence the expression of specific genes, affect their growth, development and reproduction, and reduce the population density of plant pests. Through transgenic and gene editing methodologies, some wheat traits, including the disease resistance, stress tolerance, growth and development regulation etc., can be modified[53].
3.4. Chemical Methods
The Nobel Committee’s words while presenting the 1970 Peace Prize to Dr. Norman E. Borlaug: “He had helped provide bread for a hungry world.” The Green Revolution develop high-yielding crops in an effort to feed those hungry peoples, but it must be accompanied by agrochemicals and artificial fertilizer. There are four physical formulation types of pesticide formulations: gas, liquid, gel/foam(hydrogels), and solid(nanoparticles)[54]. The formulations may be used as droplets, dusts, mists, aerosols, fogs, granules etc., and there are six introduced traditional, optimizing and emerging formulations application methods around the world(Figure 1), such as pesticide spraying, pesticide fumigation treatment, pesticide injection, pesticide mopping and painting, baits application, seed and seedling pesticide treatments(Figure 2). The feasibility of integrating these methods combined with natural insecticides and physical measures might be the effective application approaches.
3.4.1. Pesticide Spraying
Pesticide spraying refers to spreading pesticide formulations, such as emulsifiable concentrate, aqueous pesticide, wettable powder, soluble powder, colloidal suspension, aerosol and solid powder, to targets by means of spraying, fogging or dusting to control plant pests. Spraying technique is to spray liquid pesticide into droplets by different measures, such as mechanical, pneumatic or electrostatic measures etc. Fogging technique is a measure of vaporizing liquid or solid fogging agents through thermal devices, and then being condensed in the air to form fine droplets that diffuse and uniformly adhere to the target pests. Dusting technique is to use mechanically generated wind force to disperse the low concentration pesticide powder, cause the pesticide powder particles to suspend in the air, then deposit on plants and control target pests.
3.4.2. Pesticide Fumigation
Pesticide fumigation treatment is to use fumigant compounds (such as bromomethane, aluminum phosphide, sulfuryl fluoride, etc.) to control insects, bacteria, and other harmful pests in enclosed spaces. The toxic gases generated by the volatilization, gasification, and sublimation of pesticide fumigants at room temperature enter the respiratory system of insects directly through the spiracles in a unimolecular gaseous state, causing them to be poisoned and die. Due to the high efficiency, good penetration, strong mobility and contact efficiency in enclosed spaces with limited area. Pesticide fumigation treatment can fully exert the control efficacy because pesticide fumigants can self diffuse to any corner of the enclosed space and reach an effective concentration of insecticides in a short period of time.
3.4.3. Pesticide Injection
Pesticide injection application may be made directly into the xylem of plant trunk or the soil underneath the soil surface layer near the roots, relying on the conduction mechanism of plant vessels (capillary, infiltration, transpiration, etc.) to transport pesticides to the entire plant body to control pests, such as soil injection, trunk injection, wormhole injection or blockage, and root pesticide embedding etc..
3.4.4. Pesticide Mopping and Painting
Pesticide mopping and painting measures are to apply the liquid pesticides to a certain part of plant targets (such as tender crop stems or barked tree trunks), through mopping and painting, poisonous ring and other measures according to the diffusion ability, contact killing and inhaling functions of pesticides. There are several action modes of the pesticide mopping and painting measures, such as blockage, adhesion, repellent, and poisoning, to achieve a comprehensive pests control effect.
3.4.5. Baits Application
Based on the food chemotaxis of harmful pests, the baits application measure applies an appropriate amount of pesticide and toxic agents which are added to the food that harmful pests like to eat. The baits, prepared with a certain shape and color as the attractants, are released (thrown) into plant rows, tree trays, rat holes, and pests activity places to deceive and lure the harmful pests to feed. Generally, some certain physical trapping devices, chemical toxins, or manual operation are combined to trap or kill pests.
3.4.6. Seed and Seedling Treatments
The critical time to control plant pests is in early stages of their growth, especially before tillering, because infection at this time has the greatest impact on agro-forestry yield. But the seed quality might be reduced by certain seedborne diseases or destroyed by insects and other pests. The seed and seedling pesticide treatments can reduce, control or repel pests which attack the seed or seedlings without requiring plant protection practices throughout the growing season after the plants become self-sufficient. The preparation measures during the seed processing process or before sowing, such as seed dressing, soaking, and coating with pesticides, are carried out for seed disinfestation and seed protection to protect the seed and young seedling from pathogenic organisms in the soil. Seedling treatment is the selection of appropriate pesticide types and dosage based on crop types and the occurrence status of harmful plant pests in various regions. Effectively controlling harmful pests such as diseases, insects, and rats that occur during seed germination and seedling growth after sowing or transplanting, can ensure that crops are not harmed by pests.
3.5. Plant Quarantine
The plant quarantine is a legislative measure to prevent the accidental spreading, infestation, and extension of dangerous harmful organisms (diseases, insects, weeds, and other harmful pests) along with the movement and circulation of planting materials and plant products or soil, and to prevent the introduction, colonization, and expansion of all harmful organisms, which can harm agriculture, forestry, and other ecosystems in the receiving country/region. The plant quarantine is categorized into six measures, that is, interruption in pests proliferation, quarantine inspection in original planting area, epidemic source investigation and inspection, epidemic area control, virus-free plant breeding, and disinfestation treatment of plant quarantine objects(Figure 2).
3.5.1. Interruption in Pests Proliferation
Interruption in pests proliferation is the most effective and direct plant quarantine measure to fundamentally eliminate dangerous diseases, insects, and weeds. The advanced X-ray, DNA probe, Enzyme-linked immunosorbent assay (ELISA), electron microscopy, electrophoresis, electronic scanning, chromatography and pests attractants, monoclonal antibodies, fluorescence immunity are applied at entry-exit inspection ports to detect potential harmful organisms, strangle the spread of invasive organisms from the source, and block their spreading hazards. For example, a plant pests quarantine and identification system used insect DNA barcoding identification kit for detection, selected gene fragments, designed new primers, and performed amplification sequencing target genes to determine the nucleotide diagnostic sites (identification characteristics) of wood beetle insects species, and compared and identified dangerous insect species and their similarity[55].
3.5.2. Quarantine Inspection in Original Planting Area
Quarantine inspection in original planting area refers to the inspection conducted by the plant quarantine agency during the production period of transferred plant seeds, seedlings, and other propagating materials and plant products at the original agricultural and forestry production areas. Through initial pests identification in accordance with laws, the inspection should be conducted to prevent the spread of the contaminated plant products whether there are quarantine objects and other dangerous diseases, insects, and weeds that have occurred. The inspection has the characteristics of initiative, simplicity, and reliability, which can effectively prevent the spread of dangerous plant organisms between regions. It mainly carries out quarantine acceptance, investigation and identification, quarantine tracing, quarantine visa, and contaminated plant products control treatment[56].
3.5.3. Epidemic Source Investigation and Inspection
Seeds, seedlings and other propagating materials for import, which are suspected of carrying dangerous diseases, insects and weeds, must be isolated for trial planting through the epidemic source investigation and inspection. Under strict control of isolation and trial planting, it is necessary to investigate the entire production process from seed germination to seed reproduction, inspect the hidden diseases, insects, and weeds to avoid the accidental omission of plant quarantine sampling at entry ports, prevent the missed detection of pathogenic physiological races and viral diseases transmitted by individual seedlings due to the inability to detect them quickly and effectively, and overcome the shortcomings in the entry port inspection and in the field inspection of original areas. Before the trial planting, a temporal forecast epidemiological models and quantifying spatial patterns can be developed to learn the spatiotemporal dynamics of plant diseases[57].
3.5.4. Epidemic Area Control
In the light of the spreading situation of plant quarantine objects, local geographical environment, transport conditions etc., the epidemic area control shall be designated and brought under strict control which shall be implemented in different measures, such as blockading and eradication, according to the epidemic areas (where quarantine objects are found to be harmful), the low pest or disease prevalence areas (where a certain harmful pest is less prevalent and is placed under effective monitoring, control, or eradication measures), and the pest-free or disease-free areas (where no harmful pest is found), to prevent the spread out of plant quarantine objects from the epidemic area and the introduction of plant quarantine objects into the pest-free areas[58].
3.5.5. Virus-Free Plant Breeding
Plant viruses affect the growth and development of plants, especially the infectivity and proliferation of plant viruses pose a huge threat to one or a group of plants. To prevent the cross-border spread of plant viruses with the trade of host plants, elimination of viruses in plants and virus-free plant breeding are necessary, that is, using tissue culture technology to detoxify valuable plant reproductive materials (such as viruses) and reproduce sterile seedlings in large quantities. The elimination of viruses in plants and virus-free plant breeding include stem tip tissue culture, in-vitro grafting of tender buds,detoxification through thermotherapy and treatment chemotherapy, and combination methods (first thermotherapy treatment followed by stem tip tissue culture, or the use of antiviral agents to inhibit the proliferation of plant diseases combined with stem tip tissue culture). Tissue culture, usually adopted to regenerate plantlets in biotechnological breeding programs, represents the less used tool for eliminate viruses from plants. With regard to virus, thermotherapy was successfully applied against viruses belonging to 13 families and an unassigned genus. An interpretation of thermotherapy effects considers the new metabolic “pathways” triggered by the natural antiviral response emitted by the infected plant, with particular reference to virus-induced gene silencing. Instead, some plants (such as grapevine, apple and potato etc,) viruses can be eliminated with chemotherapy and tissue culture. The viruses belonging to nine families were eradicated. Several groups of antiviral drugs belong to inosine monophosphate dehydrogenase inhibitors, S-adenosylhomocysteine hydrolase inhibitors, neuraminidase inhibitors[59]..
3.5.6. Disinfestation of Plant Quarantine Objects
When harmful pests are found on plant seeds, seedlings or plant products that can be killed or eliminated under certain conditions, the pests control measures could be applied for dealing with the contaminated products. During the dormancy or growth periods of the plant materials, disinfection treatments could be performed to effectively block and control quarantine plants and prevent the spread of dangerous harmful pests. Depending on the specific requirements for the transportation of import and export plant products and the epidemic situation, the alternative disinfestation treatments are applied for high quality marketable import and export products, including mechanical treatment, washes and chemical dips, using fogs and aerosols, pesticide fumigation, anaerobic disinfestation, thermal agent treatments, freezing and low-temperature treatment, controlled atmosphere, microwave treatment, and cobalt 60 irradiation etc. The anaerobic (non chemical) soil disinfestation and inundation as separate treatments, are suitable methods to disinfest tare soils for remediation of the soils from contaminating quarantine pathogens[60].
3.6. Integrated Pest Management
IPM is a plant protection method that integrates, coordinates, and optimizes the application of necessary measures such as physical control, biological control, chemical control, agricultural methods, and plant quarantine etc. Based on the interaction mechanism between pests and environments and the dynamic changes of pests populations, the overall role of natural control factors are taking into account in the ecosystem to control the population of harmful pests within the allowable threshold of economic harm for a long time, in order to achieve the optimizing economic, ecological, and social benefits. But there are some IPM roadblocks and adoption barriers, the low levels of farmer adoption and insufficient IPM technology diffusion are invariably ascribed to different factors, some of which closely related to local farming contexts, such as, the weak farmer knowledge base, the user preferences and risk aversion, the vested interests and corporate responsibility, the traditional practices and emerging IPM technologies, the hard and soft policy levers, and the cultural barriers, the decline of public interest science[61]. Therefore, based on a large number of global related researches[2,16,61,62], the six IPM measures were summarized, that is, timely prevention and control, plant population control and management, food chain regulation on plants-pests-natural enemies, customized cultivation of resistant plants, continuous comprehensive pests treatments, and plant-centered prevention and control philosophy (Figure 2).
3.6.1. Timely Pests Control
Given increasing concerns about the environmental impact of pesticides, judicious microbiome modification via nutrient managements for modifying plant-associated microbiomes to fortify plant health, may enable us to hit multiple birds with one stone[63]. The concept of timely prevention and control is to develop the best strategy that is harmless to natural enemies and the environments based on the hazard threshold of plant pests. Only when the number of pests and pathogens reaches a certain threshold and endangers the normal growth of crops can scientific prevention and control be carried out in a timely manner. The optimization of natural pests control by adoption of specific management practices at local and landscape scales, such as establishing non-crop areas, low impact tillage, and temporal crop rotation, could significantly reduce dependence on pesticides and foster yield stability through ecological intensification[64]. More than 2000 years ago, the books of “Master Huainan•Main Skilling” and “Garden of Eloquence•Xiuwen” advocated that “You must not burn fields with fire before insects hibernate” that means you must recognize and protect the existence and reproduction rights of insects. About 1500 years ago, the book “Important Arts for the Peoples Welfare” stated that “The farmers who cultivate the land in October and November do not directly oppose the natural law, but it really harm the hibernating insects, and the land will be infertile and non-moisturized which may result in the thin and scarce harvest” (Table 1).
3.6.2. Managing Plant Population
Based on the allelopathic effects of plants, several parallel implementation measures can be explored for plant population control and management. The ecological regulation through a combination of plant population management measures are integrated, such as field cleaning engineering, functional plant populations, plant push-pull technology, natural enemies for pests control, biological control, physical control, and even the moderate chemical control with selective pesticides. Multiple cropping systems can regulate pests, in the broadest sense, by preventing their growth, reproduction, or dispersal, and modify pest foraging or reproduction directly (i.e., bottom-up control) or increase the abundance of the natural enemies of the pests which are mainly insect herbivores (i.e., top-down control). Pests can be controlled using the pull or push–pull strategies which the basic principle consists in promoting habitats that are unsuitable for pests and/or suitable for pest control auxiliaries. Push–pull uses repellent “push” plants to discourage pests from settling on crops and “pull” plants to attract them to neighboring plants[65]. In the push-pull system, trap and repellent plants are used to control populations of stem borers. Insects are trapped on highly susceptible trap plants (pull) and repelled from the main crop by repellent intercrops (push)[66].
3.6.3. Food Chain Regulation on Plants-Pests-Natural Enemies
Natural enemies have been shown to be effective agents for controlling insect pests in crops. But the density of pollen beetle significantly decreased with an increased proportion of non-crop habitats in the landscape. And the overuse of pesticides can lead to population decline of beneficial insects like natural enemies and pollinators[64]. So the food chain regulation on plants-pests-natural enemies must be emphasized to ensure the optimal conditions for the survival and normal reproduction of ecological natural enemies, through utilizing beneficial insects in nature and artificially releasing insects to control local plant diseases, insects and weeds. The approaches to benefit the ecological natural enemies include protecting local natural enemies, artificially breeding natural enemies, introducing ecological natural enemies, and accurately releasing natural enemies.
3.6.4. Customized Cultivation of Resistant Plants
Customized cultivation of resistant plants is the use of genetic variations in plant resistance to stress factors to select populations or individuals with resistance or tolerance to biotic stress of pests, through certain customized cultivation pathways. Through transgenic and gene editing methodologies, some wheat varieties could be created which showed the disease resistances to powdery mildew, rusts, scab and yellow mosaic virus[53]. In order to obtain durable resistance, alternative strategies for the deployment of R genes and the use of quantitative race non-specific resistance were advocated. There are two approaches taking into account, that is, plant transformation and marker-assisted selection. A change in focus from durability of the plant phenotype to that of the crop phenotype was advocated[67].
3.6.5. Continuous Comprehensive Pests Treatments
Due to the prevention and control complexity of plant pests, continuous comprehensive pests treatments can be developed. Continuous comprehensive pests treatments should first consider the use of mechanical, physical, and agricultural measures to prevent harmful plant pests, then consider the development of plant resistance and tolerance, plant immune grafting, chemical pheromones, crop diversity of inter species and intra species, and biological control, and finally apply chemical control. For example, the pesticides must be applied because the relative yield loss was positively associated with pest density, but the economic return of management actions is a major criterion for farmer decision making. The cost-effectiveness of current pesticide-based pest management was often questioned. And Through comparing the various elements in the full cascade from natural enemy and pest abundance to crop injury, yield loss, labour and economic performance, the relationship between surrounding landscape composition and pest densities and crop injury was analyzed with mixed-effects models[68]. That is, the more ecologically based pest management strategies could comprehensively be taken into account, such as the continuous comprehensive pests treatments through agricultural, physical, chemical and/or biological control etc.
3.6.6. Plant-Centered Prevention and Control Philosophy
The concept of “Agroecological Crop Protection(ACP)” was proposed which emphasized the crop-centred instead of the pest-centred for the plant protection[69]. From a spatiotemporal perspective of the “Eight Ps” agricultural ecological plant protection which includes pests and plants, pesticides, policies, people, production, participation, profits etc. The scope of harmful pests (pest--centred) in traditional IPM can broaden and extend to endow plants, pesticides, policies, people, production, participation, and profits that unified to plant-centered concept for the plant ecosystem optimization practices. Then the novel methods for sustainable plant protection could continually be found and explored from the perspectives of biodiversity and soil health by directly or indirectly optimizing the interactions between plant, pests, and microbial communities, in order to make ecological functions less susceptible to biological stress and improve the health status of agro-forestry ecosystems.
4. Advances in Pesticide Application Technology
After the artificial synthesis of organic pesticides, plant protection has entered the pesticide-priority-based stage in the last century. The centennial development of mechanical application of chemical pesticides to eliminate or control harmful pests was reviewed at the ASABE Centennial Commemorative Event[70]. After 2000s, there have been emerging new developments, such as plant protection UAVs, intelligent sprayers, spraying simulation and measurement, profiling spraying, target recognition, spraying robots, and the application of various new technologies in plant protection machinery[2,71,72,73], as shown in Figure 3.
4.1. Pesticide Spraying Machinery
Pesticide spraying machinery is used to apply pesticides on targets to control plant pests, apply herbicides to control weeds and spray fertilizers to enhance plant growth in agro-forestry production which can be classified into different types by spraying medium, driven power source, and transportation platform etc. as shown in Table 2. By the spraying medium, it can be divided into pesticide sprayer, duster, fogger, and bio-pesticide sprayers. By the driven power source, it can be divided into manual-operated, animal-powered, electric-driven, engine-driven and others. By the carrier platform, it can be divided into portable, ground mounted, aviation platforms, etc. By the function, it can be divided into toward-target sprayer, anti-drift sprayer, intelligent sprayer and spraying robot etc.
4.2. Pesticide Fumigation Technique
Pesticide fumigants should be used in enclosed spaces(such as greenhouses) and in dense forests or other enclosed field conditions[75]. Some chemical irritants (such as adding ethyl acetate)can be added to the fumigants to stimulate the opening of insects respiratory system muscles. Mixing carbon dioxide gas into the fumigants can also increase the respiratory rate of insects and enhance the fumigation effect. Using a modified towed bed mulch layer method, Ethanedinitrile (EDN) in a pressurized vessel was applied to the soil fumigation at a depth of 20 cm. The treated area was covered by totally impermeable film which was removed 14 days after application. Results showed strong effect of EDN treatment on viability of the nematode and some yield characteristics were positively influenced by EDN treatment [116].
4.3. Pesticide Injection Application Measures
Pesticide injection measures may use different injectors to apply the pesticides, such as soil injections, trunk injections, wormhole injection or blockage, and root pesticide embedding[1,75]. The soil injection pressures the plant growth regulators, nutrients, antibiotics, and pesticides below mulch or turf and directly into the root zone of the tree using some pressurized root feeder system. Soil drenching is similar to soil injection, except the pesticide mixture is poured onto the soil surrounding the tree base. The soil-active herbicides were used for effective control of the underground noxious perennial weeds that the soil-injection delivers the probable soil-active to subterranean creeping weeds systems[117]. The trunk injector drills holes around the tree truck and pressures the pesticide into the tree. A macroinjection system uses tees and tubing to deliver high volumes of chemicals from a pressurized reservoir into multiple injection sites. A microinjection system drills fairly small holes in the tree, pressurizes and inserts plastic capsules into the tree, then breaks the seal in the capsule and releases the pressurized chemical to deliver small volumes of highly concentrated solutions into the tree[118,119].
4.4. Pesticide Mopping and Painting Measures
Insect pests damage plants and crops via feeding, sap-sucking or infesting different parts of the plant, including leaves, buds, flowers, stems, fruits and seeds, roots, tubers and bulbs, as well as seedlings and sown seeds. Insects interact with the surfaces of coatings when they land, crawl or climb on targets. The possible strategies of particle film technology applies a hydrophilic kaolin particle-based coating to plants and trees to repel insects or reduce the adhesion of crawling insects[33]. During the peak period of adult emergence of stem borers, the inhaling insecticide can be diluted and evenly mopped onto the tree trunk and sealed with plastic film to prevent and control stem borers in poplar trees[120]. Paints have been used over the years to protect tree wounds from invasion by microorganisms and to promote healing. The main action of pesticide wound paints is to prevent the insect vectors of the diseases from having access to the wounded tissue[121]. Based on understanding the oviposition habits of longicorn adults, a trunk sprayer was used to evenly paint pesticide solutions on the trunk to control poplar longicorn[122]. By using image recognition of weeds and controlling the pesticide mopping applicator, the selective weeds control can be achieved. For example, the weeds image recognition, physical weeds cutting and herbicide mopping application can be integrated into a weeds control robot. An end-effector of the robot can cut the cuticle layer of weeds leaves while mopping internally conductive herbicides to the incision, promoting the absorption and transmission of herbicides[1,123].
4.5. Baits Application Technique
Baits spreading application uses the poison baits made from pesticides and food baits or inert insecticide baits with synthetic attractants, which are thrown into plant rows, tree trays, rodent holes, or other harmful pests activity areas, to attract pests to feed and become poisoned. According to electromechanical integration, an automatic control system of baits spraying machine was developed to control the quantitative spreading of the granular poison bait for grassland rodent control[124]. Smart pest control technologies based on RNA-based gene silencing compounds incorporated and encapsulated into food baits stand at the forefront of current strategic research[125].
4.6. Seed and Seedling Enhancement Technology
The seed enhancement technologies (SETs) are the novel approach to improve the performance of seeds. The main seed and seedling enhancement treatments include pesticide seed dressing, seed soaking, fluid drilling, seed coating or film coating, pelleting, priming, and flash flaming etc., which are commonly used as systematic seed and seedling treatments to enhance seeds and seedlings against injury by early season pests to prevent them from being harmed by diseases, insects, and weeds after sowing or transplanting[75,126,127,128,129]. For the fluid drilling (also referred to as fluid sowing or gel seeding), seeds germinated under ideal conditions and faster seedling emergence should lessen the likelihood of soil crust development or pathogen attack before the seedlings emerge[126]. Many crop seeds are small and irregular in shape which do not permit the accurate metering by mechanical planting equipment. Then the seed coating and seed pelleting machines can coat highly adhesive seed coating agents on the surface of the seeds to form the pesticide film layer and provide the opportunity for greater loading of material around the seeds and the spatial orientation of active ingredient can be varied within the pellet[75,127]. Priming is a pre-sowing treatment whereby seeds are hydrated in either water, an osmotic solution, water or osmotic solution with additives (e.g. plant extracts or plant hormones), or through contact with a moistened solid carrier, to begin the germination process (i.e. increasing metabolic activity) to improve and synchronise germination extent and speed, and to enhance seedling growth and establishment. Hydropriming uses water with a range of additives, such as algae, bacteria, nanoparticles, plant hormones or synthetic compounds. Flash flaming removes undesirable fruit or floret appendages such as hairs and awns which may inhibit the application of additional seed enhancement technologies that the seeds are rotated continuously in a modified drum, repeatedly exposing them to a stationary flaming device for increasing the bulk density of seeds and increasing the flowability through mechanized seeding units[128]. Activated carbon SETs can provide some protection from any negative effects caused by post-emergent herbicides applied prior to seedling emergence by increasing seedling survival[129].
5. Key Technologies for Pesticide Spraying System
5.1. Pesticide Spraying Process and 3R/3E/3M Analysis
From organochlorine, organophosphorus, organic nitrogen, carbamate to pyrethroids, and from insecticidal and bactericidal to weeding, the pesticide applications make pests resistant to pesticides and may kill natural enemies, lead to ecological imbalance, cause pesticide residues in agricultural products, and the harmful diseases, insects and weeds may resurge and recur year by year or even worsen. The resistance, resurgence, and residue are the 3R problem in pesticide applications[1]. In order to improve the performance of pesticide applications, it is necessary to pursue the achievement of 3E, namely efficacy, efficiency, and eco-environment. There are three processes of pesticide spraying, that is, the atomization process to generate droplets, then the transporting and depositing process to move droplets from sprayer to target, and finally the deposition process to deposit droplets onto the target. Actually a sprayer can be easily conversed to a duster through replacing the liquid delivery hose by a bigger diameter pleated hose to carry the powdery pesticide from the tank into the air stream and providing an air distributor at the bottom of the tank for keeping the pesticide in suspended form[75,130]. So we mainly focus on the topic of liquid pesticides when talking about the pesticide applications.
During pesticide spraying, the phenomena of leaking, remaining pesticides in tank, evaporating, drifting, dripping, bouncing, interfacial run-offs and so on may occur between the sprayer and the target, which are closely related to the structural performance and operating parameters of the key components of the sprayer, the physical and chemical properties of pesticides and the target surface characteristics, as well as climatic conditions, as shown in Figure 4. The atomization theory, droplet dynamics, deposition mechanism, and their prevention and control effects, as well as pesticide residue issues could be paid attention.
5.2. Key Components of Pesticide Sprayers
Key components and the related performances of pesticide sprayers include atomizing nozzle and nozzle wear, variable rate control system, direct injection system and inline mixing, droplet drift control, spray boom and boom balance, profiling mechanism, flexible chassis, etc.[1,2,16,48,70,71].
5.2.1. Atomizing Nozzles and Nozzle Wear
A nozzle is an important part of atomizing pesticides, which plays a decisive role in spraying performances. According to the liquid atomization forces, the atomization can be divided into capillary tube atomization [131], hydraulic atomization (flat-fan nozzle, swirl nozzle, etc.)[131,132,133], centrifugal atomization with rotating disc (or rotating cage, rotating cup)[131,134,135,136,137], aerodynamic atomization (air blast) [131,138], ultrasonic wave atomization[131], electrostatic atomization[16,131,135,139] and the combination atomization methods[140], as well as the principle of droplet control and optimal technology[141]. In order to achieve specific spray performance, it is necessary to study the nozzles with special requirements, design specific structures and their hydrodynamic characteristics, such as low-drift air-induction nozzles[142], variable rate nozzle[143], bypass nozzle for increasing flow range[144], rotary cup atomizer for controllable droplets[136], intermittent flow control nozzle using pulse modulation[145], and fan-shaped nozzle with a feedback channel for reducing the droplet diameter and improving the spraying uniformity[146] etc.
The possible solid particles in pesticides (such as pesticide fillers, bioactive substances of bio-pesticides and impurities during pesticide mixing) may cause erosion wear on the inner wall of nozzles, change the internal size and the orifice shape of nozzles, resulting in adverse consequences such as poor spraying performance. Therefore, the service life of a nozzle largely depends on failures by wear. Through the research on nozzle wear, the quality and performance of spraying can be improved and the criteria for nozzle scrapping can be predicted[48,147].
5.2.2. Variable Rate Control System
Variable rate technology (VRT) in pesticide application can realize the feedback regulation robust control of spraying pressure, carry out the variable-rate precision pesticide application for each small field when the timely growth conditions of target plants are acquired, and the setting pressure is calculated according to variable information such as sprayer driving speed and pesticide application volume requirements. Current VRT includes pressure regulation system, direct injection system, an automatic variation of nozzles with different sizes. The core of VRT is the variable spraying control system to achieve the spraying goal of on-demand applications[143,148,149,150,151,152]. The developed variable control system was able to adaptively adjust the amount of sprayed pesticide based on the traveling speed of the sprayer[153]. A variable flow control system with pulse width modulation(PWM) controller was tested in real time with deep learning[154].
5.2.3. Direct Injection System and Inline Mixing
Most of the sprayers work by adding water in a pre-mixed solution. But the dose applied in the field should be in the relation of target-organism response and many different factors, such as the sprayer driving speed or pressure fluctuations. A variety of pesticide mixing methods have been conducted to increase the pesticide mixing ratio and mixing uniformity for meeting the safe, environmental and efficient agro-forestry production. Direct injection system adopts the separate water tank and pesticide tank, and the pesticide and water are mixed inline as needed during the pesticide application process[155,156,157,158]. A stepwise logarithmic sprayer was developed to replace the work of preparing every dosage in separate bottles before spraying and allow the stepwise reduction of the pesticide dosages with high accuracy and precision[159]. A set of double-stage inline jet mixing apparatus was designed to select the appropriate jet nozzle parameters[160].
5.2.4. Droplet Drift Control
Droplet drift is a phenomenon that occurs when pesticides are sprayed and moved through the air towards unintended targets, including non-target and off-field drift, evaporation drift, which can cause pesticide wastage, environmental pollution, and reduction of pesticides application efficiency[161,162]. Drift control measures include installing an air-assisted system[102], installing pneumatic-shield spraying system[103], setting recycling tunnel [101], applying solid set canopy delivery system and fixed spraying system[104,105], and developing anti-drift nozzles[142]. Low-drift nozzles with air induction promoted a less homogeneous droplet spectrum than the nozzles without air induction, but produced droplets with larger VMD and reduced the drift problem[163].
5.2.5. Spray Boom and Boom Balance
The sprayer boom is an important weak damping elastomer for widely used sprayers in plant protection and the entire sprayer boom needs to maintain an ideal height with the ground or crop canopy and the uniformity of liquid distribution[153,164]. The elastic deformation of sprayer boom will directly lead to overlapping spraying or missed spraying, which will result in the decrease of droplet deposition uniformity. It is necessary to study the sprayer boom structure and its movement, the sprayer boom suspension device, etc., and the methods to restrain the elastic deformation of the sprayer boom, such as, boom control system for pendulum active suspension[164], two symmetrical cable defined as elastic bodies to reduce the spray boom’s elastic deformation[165], boom structure optimization, multi-stage and multi-point vibration damping improvement, and intelligent adjustment of boom position and posture[166]. In order to realize efficient, precision and variable-rate pesticide spraying applications on diverse crops and terrains, a reconfigurable ecodesign method of intelligent boom sprayer was developed based on Preferable Brownfield Process[167].
5.2.6. Profiling Spraying Mechanism
Profiling spraying technology is based on the shape information of target canopy such as fruit trees, street trees, garden landscape trees and hedge plants which detected by sensors[168,169], and the relevant spraying mechanism is automatically adjusted to reach the ideal spraying distance for profiling and target spraying operation, so as to improve the uniformity of droplet deposition distribution in the target canopy and increase the pesticide application efficiency[169,170].
5.2.7. Flexible Sprayer Chassis
The chassis of a sprayer should have good cross-country trafficability, maneuverability, ride comfort and smoothness according to the pesticide application scenario. The chassis also needs the disturbance error compensation ability, the height adjustment and track width adjustment in complex agro-forestry environments. A flexible intelligent chassis should include chassis power system, flexible chassis control, navigation system, positioning and track optimization, etc.[171,172,173].
5.3. Performance Measurement of Pesticide Spraying Process
The important performance indicators for evaluating the quality of pesticide spraying include the performance of atomization process, droplet transporting and depositing process and deposition process, such as droplet size and distribution, droplet deposition density, pesticide droplet coverage, etc.[72]. In order to overcome the randomness, non-repeatability and one-sidedness in the field pesticide application experiments, a comprehensive spraying experimental system is generally needed to be established.
5.3.1. Measurements in Atomization Process
The atomization process refers to the process of liquid pesticide transportation in hose, premixing or inline mixing, and droplet formation before the droplets leave the nozzle. The performances in the atomization process include macroscopic and microscopic spraying characteristics. The macroscopic spraying characteristic parameters include the spraying flow cone shape, the jet penetration length, the liquid film breaking distance, the droplets distribution in the spraying process, the inline pesticide mixing, and the application dosage adjustment, etc. The microscopic spraying characteristic parameters include the deformation, splitting, aggregation, collision and other microscopic processes of droplets, as well as the droplets size spectrum and uniformity, the droplets position in the flow field, and the droplets velocity and temperature. The droplet size analyzers, the liquid surface tension meters, and the visual optoelectronic testing technology have been applied to study the complex atomization mechanism and analyze the subsequent spatial droplet movement law [72,174,175]. The sampling for measuring droplet size mainly include mechanical, optical, and image processing means[176,177]. Optical means utilize the physical properties of droplets (such as light intensity, phase difference, fluorescence, and polarization), using high-speed photography, laser holography, and scanning techniques, such as Aerometrics P/DPA, Malvern laser particle spectrometer, PMS, Bete droplet analyzer, and KLD, etc.[177], as well as computer-aided laser imaging droplet sizing system[177,178]. Using fluorescence analysis and high-speed photography technology, the fluorescent agents were added to simulated pesticides for the measurement of the pesticide inline mixing, including mixing concentration and uniformity, and mixing response time[179,180]. The atomization process of complex pesticide components was studied which alter the morphological structures of liquid sheet leading to different potential droplet drift characteristics[181].
5.3.2. Measurements in Droplet Transporting and Depositing Process
The pesticide transporting and depositing process refers to the process after the pesticide droplets leave the nozzle and before reaching the target. The measurements in droplet transporting and depositing process include the analysis of the influence of spraying operation parameters such as nozzle type, airflow, spray direction and meteorological conditions on the droplet transporting and drift performance for pesticide sprayers and plant protection UAVs. For example, the influence of several operational parameters of plant protection UAVs on droplet drift performance and depositing characteristics could be analyzed, such as optimal flight altitude, operating speed range, nozzle type and spraying parameters, rotor and downwash wind field, battery and endurance, control system, route planning and supporting components etc.[89-91;182-183]. Through the measurements of gas-liquid-solid multiphase flow field, etc., the flow appearance and depositing characteristics of multiphase flow field, as well as the influence of spraying parameters on droplet transportation and depositing, could be analyzed, and the best operating parameters could be determined[182,183]. For electrostatic pesticide spraying, the electric field distribution, the charge-to-mass ratio and the charge attenuation pattern of the charged droplets could be tested[93,184,185,186]. A large number of studies have been carried out on the effects of spraying parameters and target characteristics on the depositing and drifting of pesticide droplets around the world[182,183,184,185,186,187,188,189,190,191,192]. A series of spraying trials were designed that measured drift from a conventional sprayers using mobile spray test platform, water sensitive paper, image PIV, ultrasonic anemometer and so on[187,188,189]. The influence of main spray drift reduction agents on drift mitigation were evaluated through open circuit-type wind tunnels and based on field measurements[190]. The polyester line drift samples were suspended on 15 vertical masts downwind of foliar applications of zinc, molybdenum, and copper micronutrient tracers. Samples were analyzed using inductively coupled plasma mass spectrometry, and resulting masses were normalized by sprayer tank mix concentration to create tracer-based drift volume levels which could be useful for estimating potential exposure and validating orchard-based bystander exposure models[191]. A portable droplet detection system was developed to detect the droplet deposition in drone applications that consists of a droplet depositing image loop acquisition device and a supporting computer interactive platform[192].
5.3.3. Measurements in Deposition Process
During the droplets reach the target, the vertical forward impacts or the oblique impacts occur[193,194]. The droplets movement behavior directly affects the off-target possibility of droplets and droplet deposition distribution performance, and is closely related to the target surface properties, the droplet behaviors contacting with the target, environmental conditions, auxiliary additives, etc. The droplet behaviors contacting with the target include bounce[195], adhesion[196], penetration[197], retention[198], evaporation[199], etc. To learn the pesticide control efficacy, the measurements of the droplet deposition coverage rate could be conducted[72,200].
5.4. Simulation and Modeling of Pesticide Spraying
The simulation and modeling of pesticide spraying process can make up for the difficulties in experimental research caused by differences in plant growth cycles, different occurrence degree of plant pests, and uncontrollable natural environments of field pesticide applications. The process of pesticide spraying is relatively complex, and cannot be analyzed solely by mathematical tools. The conventional direct performance measurements also have great limitations and the conclusions obtained from the measurements are only suitable for the application conditions with the same measurement conditions. Based on the physical and mathematical models of mixing, atomization, evaporation, drifting, dripping, etc. that may occur in the process of pesticide spraying, through numerical simulation calculation, the influence of one or several parameters (such as spraying distance and leaf area density etc.) on the atomization, transporting, and deposition performance can be studied, so as to adjust the optimal spraying distance and application dosage to improve the application efficiency. It can study the theoretical model of pesticide spraying and computer simulation instead of traditional field measurement ways, shorten the development cycle of pesticide sprayers, and improve the reliability of advanced sprayer design[71].
5.4.1. Simulation and Modeling of Pesticide Atomization Process
The modeling of atomization process includes atomization mechanism and modeling, nozzle flow control modeling, inline mixing simulation, etc. The atomization process and boundary conditions of the nozzle are relatively complex, and its mechanism research and modeling mostly rely on empirical and experimental data. Some related atomization mechanisms and modeling studies have been conducted on flat-fan nozzles[201], hollow cone nozzles[202], anti-drift nozzles[203], electrostatic nozzles[204], and centrifugal nozzles[205], etc. around the world. When the precision pesticide spraying system carries out independent variable rate control on the nozzle, it often needs to establish the nozzle flow model, such as the research on response characteristics and modeling simulation of PWM variable-rate control system[206,207]. For the inline mixing of water-soluble pesticides with water or fat-soluble pesticides with oil, simulation analysis can be conducted based on CFD using different injection and mixing ways such as metering pump control, jet (swirling jet or rotating jet), direct injection of valve controlled nozzle, and pre-mixed inline injection system with buffer tank[157,208].
5.4.2. Simulation and Modeling of Pesticide Transporting and Depositing Process
The simulation and modeling of pesticide transportation and depositing process includes the numerical simulation and simulation of spraying flow field, the electric field and flow field simulation of electrostatic spraying, and the spraying model construction of plant protection UAV etc.. The numerical simulation and simulation of flow field includes aerodynamic droplet trajectory model[209], dynamic distribution model of spray deposits[210], air-flow field modeling[211], air-velocity distribution simulation of air-assisted orchard sprayer[212], discrete phase droplet deposition simulation[213], visualization model for droplet deposition[214] and moving trajectory simulation of charged droplets [215] etc.. In particular, pesticide droplet drift is always accompanied by pesticide spraying operations, which might cause various serious consequences and the research on pesticide droplet drift simulation has attracted great attention. The pesticide droplet drift simulation and the construction and application of typical drift algorithm models have been widely studied, such as droplet drift modeling of air-assisted spraying[216], and using CFD model to predict the drift trend of droplets[217,218]. A series of typical drift algorithm models have been developed to predict the deposition patterns of pesticides released into the atmosphere, including AGDISP (Agricultural DISPersal), AgDRIFT, PERFUM (Probabilistic Exposure and Risk Model for FUMigants), SOFEA (Soil Fumigant Exposure Assessment), and FEMS (Fumigant Exposure Modeling System) [219,220] and so on.
5.4.3. Simulation and Modeling of Pesticide Deposition Process
The deposition interaction process and behaviors of bounce, adhesion, evaporation, retention, penetration, and run-off of pesticide droplets upon reaching the target have attracted widespread attention around the world[193,194,221,222,223,224]. The simulation and modeling of pesticide deposition process will focus on target feature simulation[222,224], droplet to target impact model[221], droplet deposition simulation and coverage model[223], etc.
5.5. Measurements and Analysis of Pesticide Spraying Efficacy
The measurements of application quality characteristics include mean volumetric diameter, density and coverage of droplets, number of droplets, and open area in the interrows without leaf[225]. The spraying quality measurement of volumetric diameter and coverage percentage were carried out with an unmanned aerial vehicle as a function of flight height and target position in a mountainous coffee plantation region[226]. The spray application process for crops (such as vineyard, orchard fruits, citrus, olive trees, etc.) represents the most controversial and infuential actions directly related with economical, technical, and environmental aspects. The measurements of pesticide residue[227,228], microbial pesticide survival-rate, control efficacy, and pesticide effective utilization rate[72] could be conducted using optical screening methods, nanoplastic sensor array and other techniques.
A UAV equipped with a multispectral camera was used to obtain data to build a canopy vigour map and the practical prescription map of an entire parcel which was uploaded into the dedicated software embedded in the UAV. The working parameters were modified in real time in order to follow the prescription map and the goal of the safe pesticide application was achieved[229].
6. Summary and Future Research Suggestions
After reviewing the history of the struggle between human beings and plant diseases, insects and weeds, especially reviewing the thoughts of plant protection in ancient Chinese agricultural books, the target recognition of plant pests and the plant protection methods and measures were summarized, then the development overview of pesticide application technologies were focused and reviewed systematically by combining the development timeline of pesticide application and the key technologies of pesticide spraying system.
Significant progress has been made in plant protection methods and measures around the world, and obviously the pesticide application is the most effective approach to control some of the most troublesome plant pests. But there are still a series of problems in the pesticide applications with 3Rs, hence we should try the best and comprehensive ways to improve the pesticide application efficiency and finally reduce the need for chemical intervention according to the analysis of 3R/3E/3M. The following three suggestions for further research are proposed from the perspectives of human-being and environmental health, the sustainable and eco-friendly application medium, and the efficiently application equipment system in plant protection.
(1) From the perspective of the human-being and environmental health.
① Develop policies and regulations that focus on human and environmental health to promote harmonious development between humans and nature: to formulate strict plant quarantine policies and measures during personnel and products travelling; to formulate furtherly policies related to pesticide applications based on strengthening the relationship between operators and applicators, managers, consumers, and policymakers.
② Improve the operational skills training on plant protection measures: to train systematically on the plant protection practices and pesticide spraying operation with required licensing (public or commercial specialty applications licenses).
③ Study the personal protection technology for pesticide application operators: to develop novel and reliable personal protective equipment and make sure that the necessary protective equipment (e.g., gloves, safety glasses, etc.) should be worn when applying pesticides in accordance with the pesticide product labels.
④ Carry out continuously pesticide residue detection and degradation: to maintain the food and fiber safety for consumers; to ensure the soil fertility and sustainable use of the lands.
(2) From the perspective of the sustainable and eco-friendly application medium.
① Explore more pesticide-free plant protection methods: to further develop the agricultural measures, physical control methods following the Chinese ancient thoughts on plant protections; to study novel technologies and equipment for pesticide-free plant protection as the development of science and technology.
② Study new smart pesticide formulations: to prepare the original pesticides into nano-microemulsion, nano-microcapsule, nano-microsphere, nanogel and other types of nano-pesticides through nanotechnology while giving full play to the advantages of water dispersity, large coverage, good leaf adhesion, and long duration; to develop the smart pesticide formulations to improve the area of effective ingredients contacting the target, enhance the ability to penetrate the leaves into the plant interior for further improving the absorption of pesticides by plants.
③ Explore new types of biological control (genes, resistant varieties, biopesticides) and plant regulators: to study nano-biopesticides with severe advantages such as higher solubility and mobility, and lower toxicity based on nanotechnology; to develop nucleic acid pesticides with excellent water solubility and strong specificity, which cause degradation of transcripts or inhibition of translation through the naturally occurring small nucleic acid interference (RNAi) pathway in the target pests, interfere with the normal growth of the target pests, reduce harm to the host plants.
④ Develop new methods for pesticide applications: to study the new measures of additives using, inline mixing, drift controlling, and target recognition etc.; to study the pesticide absorption mechanism in the target plant leaves (such as the leaves with hydrophobic surfaces, waxy leaves, leaves with hydrophilic surfaces, and hairy leaves) ; to study the synergistic application of smart pesticide formulations and chemical pesticides to delay the resistance of chemical pesticides, reduce environmental pollution and enhance pests control efficacy.
(3) From the perspective of the efficiently application equipment system.
① Study the modification and innovation of easy-operated, environmental-friendly equipment: to develop portable electric-driven pesticide spraying system with the power source modification in diverse agro-forestry production environments; to develop other more novel driven power sources for improving the capabilities of pesticide spraying systems for use in fields away from a power grid that especially the battery can be recharged by a solar panels.
② Explore the autonomous and unmanned plant protection robots: to develop plant protection UAVs with multi-functions and especially maintaining the stable flight in the proximity pesticide applications near the target plant canopies; to study the pesticide spraying robots for improving the efficiency and reducing the labor costs in the agro-forestry production; to develop and install a low-cost robotic system to convert the traditional pesticide sprayers into fully autonomous pesticide spraying robots through using real-time machine vision and automatic individual nozzle control with solenoid valve.
③ Establish a systematic, networked, and intelligent plant protection machinery system: to develop the knowledge base of plant dimensional barcode, and establish the cloud-based comprehensive plant AI model to digitally manage plant pests; to develop the flexible mobile platforms for plant protections with localization and navigation system, intelligent spraying system, remote control and human-machine interface, etc.; to establish a comprehensive plant protection system that complements the collaboration of plant protection robots, plant protection UAVs, ground plant protection machinery based on flexible mobile platforms, fixed plant protection machinery driven by solar energy, and even all the machineries in plant protection practices.
Author Contributions
Conceptualization, Z.J. and X.Y.; resources, Z.J. and X.Y.; writing—original draft preparation, Z.J. and X.Y.; writing—review and editing, Z.J. and X.Y.; All authors have read and agreed to the published version of the manuscript.
Institutional Review Board Statement
Not applicable.
Data Availability Statement
Not applicable.
Acknowledgments
Thanks to the editors and experts for suggesting changes to this article.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Zheng, J.; Zhou, H.; Xu, Y. Precision Pesticide Application Technique; Science Press: Beijing, China, 2006. [Google Scholar]
- Zheng, J.; Xu, Y.; Zhang, H.; Zhou, H.; Li, Q. Advances and Prospects of Target Recognition Techniques for Forest Pest Control at Home and Abroad. Scientia Silvae Sinicae 2023, 59, 152–166. [Google Scholar]
- Venkataraman, S.; Badar, U.; Shoeb, E. An inside look into biological miniatures: molecular mechanisms of viroids. Int. J. Mol. Sci. 2021, 22, 2795. [Google Scholar] [CrossRef]
- Liu, W.; Zhen, Z. Research progress in the spread of Phytoplasma and PCR detection in forest trees. Forestry and Ecological Sciences 2021, 36, 8–13. [Google Scholar]
- Zhang, L.; Yin, Y.; Wu, Y. Regular LAMP and fast LAMP for the detection of Xanthomonas axonopodis pv. citri. Plant Protection 2013, 39, 95–101. [Google Scholar]
- Lei, R.; Fei, X.; Li, M. Development of CRISPR/Cas-based detection method and its application in plant pathogens. Plant Quarantine 2021, 35, 1–10. [Google Scholar]
- Kim. S.; Lee, W.; Lim, C. et al. Hyperspectral analysis of pine wilt disease to determine an optimal detection index. Forests 2018, 9, 115. [Google Scholar] [CrossRef]
- Cox, K.; Scherm, H.; Serman, N. Ground penetrating radar to detect and quantify residual root fragments following peach orchard clearing. HortTechnology 2005, 15, 600–607. [Google Scholar] [CrossRef]
- Susaeta, A.; Soto, J.; Adams, D. , et al. Expected timber-based economic impacts of a wood-boring beetle (Acanthotomicus Sp.) that kills American Sweetgum. J Econ Entomol 2017, 110, 1942–1945. [Google Scholar] [CrossRef]
- Martineza, A.; Fischbeina, D; Villacidea, J. et al. 2019.Trapping success and flight behavior of two parasitoid species of the woodwasp sirex noctilio. Biological Control 2019, 134, 150–156. [Google Scholar] [CrossRef]
- Zhou, Y.; Liu, W.; Luo, Y. , et al. Small object detection for infected trees based on the deep learning method. Scientia Silvae Sinicae 2021, 57, 98–107. [Google Scholar]
- Liu, X.; Sun, Y.; Cui, J. Early recognition of feeding sound of trunk borers based on artificial intelligence. Scientia Silvae Sinicae 2021, 57, 93–101. [Google Scholar]
- Wilschut, L.; Heesterbeek, J.; Begon, M. Detecting plague-host abundance from space: Using a spectral vegetation index to identify occupancy of great gerbil burrows. International Journal of Applied Earth Observation and Geoinformation 2018, 64, 249–255. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y.; Li, H.; Qu, Y. Comparative test on different prevention and control measures of rabbit harm in region of western Liaoning Province. Protection Forest Science and Technology 2020, 25–27. [Google Scholar]
- Wen, X.; Cheng, X.; Dong, Y. Analysis of the activity rhythms of the great gerbil (Rhombomys opimus) and its predators and their correlations based on infrared camera technology. Global ecology and conservation 2020, 24, e01337. [Google Scholar] [CrossRef]
- Zheng, J.; Xu, Y.; Zhang, H.; Zhou, H.; Li, Q. Development of plant protection machinery at home and abroad and prospects of intelligent integrated pest management system. China Plant Protection 2022, 42, 20–28. [Google Scholar]
- Mahmudul Hasan, A.; Ferdous, S.; Dean, D. A survey of deep learning techniques for weed detection from images. Computers and Electronics in Agriculture 2021, 184, 106067. [Google Scholar] [CrossRef]
- Zheng, J.; Jia, Z.; Zhou, B. Real-time mosaicing system and distance detection based on dynamic tree image sequence. Scientia Silvae Sinicae 2014, 50, 82–89. [Google Scholar]
- Stone, C.; Mohammed, C. Application of remote sensing technologies for assessing planted forests damaged by insect pests and fungal pathogens: a review. Current Forestry Reports 2017, 3, 75–92. [Google Scholar] [CrossRef]
- Li, Q.; Zheng, J.; Zhou, H. , et al. Online measurement of tree crown volume using vehicle-borne 2-D Laser scanning. Trans. of the CSAM 2016, 47, 309–314. [Google Scholar]
- Xavier, T.; Souto, R.; Statella, T.; Galbieri, R.; Santos, E.; Suli, G.; Zeilhofer, P. Identification of Ramularia Leaf Blight Cotton Disease Infection Levels by Multispectral, Multiscale UAV Imagery. Drones 2019, 3, 33. [Google Scholar] [CrossRef]
- Carson, R. Silent Spring; Holybird Publishing, 1962.
- Bargués-Ribera1, M.; Gokhale, C. . Eco-evolutionary agriculture: a study in crop rotations. bioRxiv, Aug. 2018, 28. [Google Scholar] [CrossRef]
- Van Wyk, A.; Van Staden, E.; Nel, W.; Prinsloo, G. The feasibility of bridge-grafting to restore the flow of sucrose in girdled Ocotea bullata and Curtisia dentata medicinal trees. South African Journal of Botany 2019, 123, 241–252. [Google Scholar] [CrossRef]
- Zaim, N.; Tan, H.; Rahman, S.; et al. Recent Advances in Seed Coating Treatment Using Nanoparticles and Nanofibers for Enhanced Seed Germination and Protection. Journal of Plant Growth Regulation 2023. [Google Scholar] [CrossRef]
- Xu, R.; Zhou, Q.; Wang, S. Technical development on mechanized control of locust. Trans. CSAM 2005, 36, 171–173. [Google Scholar]
- Bhusal, S.; Khanal, K.; Goel, S.; et al. Bird deterrence in a vineyard using an unmanned aerial system (UAS). Trans. of the ASABE 2019, 62, 561–569. [Google Scholar] [CrossRef]
- Wu, X. The effect of ultrasound-stress on physiology and biochemistry and feeding behavior of Monochemus alternatus. Hope. Thesis, for Master, Central China Normal University, Wuhan, 2014. [Google Scholar]
- Kshetri, S.; Jiken, J.; Steward, B.; et al. Investigating the effects of interaction of single-tine and rotating -tine mechanisms with soil on weeding performance using simulated weeds. Trans. of the ASABE 2019, 62, 1283–1291. [Google Scholar] [CrossRef]
- Zhang, L.; Tang, K.; Zhao, Y.; Wang, X.; Yu, D.; Lu, X.; Wang, X. Optimization of leg structure parameter of quadruped laser weeding robot. Trans. of the CSAE 2020, 36, 7–15. [Google Scholar]
- Shimoda, M.; Honda, K. Insect reactions to light and its applications to pest management. Applied Entomology and Zoology 2013, 48, 413–421. [Google Scholar] [CrossRef]
- Huang, B.; Lin, G.; Wang, X.; Zhang, X. Control effects of fly nets to the pests of vegetables in greenhouses. Plant Protection 2013, 39, 164–169. [Google Scholar]
- Feat, A.; Federle, W.; Kamperman, M.; van der Gucht, J. Coatings preventing insect adhesion-An overview. Progress in Organic Coatings 2019, 134, 349–359. [Google Scholar] [CrossRef]
- Zhu, L.; Xue, S.; Chen, J.; et al. Parameter optimization on killing aphid by using high-voltage electrostatic discharge. Trans. of the CSAE 2013, 29 (Supp.1), 46–51. [Google Scholar]
- Davis, F.; Wayland, J.; Merkle, M. Ultrahigh frequency electromagnetic fields for weed control: phytotoxicity and selectivity. Science 1971, 173, 535–537. [Google Scholar] [CrossRef] [PubMed]
- Jia, Z.; Ehsani, R.; Zheng, J.; Xu, L.; Zhou, H.; Ding, R. Heating characteristics and field control effect of rapid citrus huanglongbing steam heat treatment. Trans. of the CSAE 2017, 33, 219–225. [Google Scholar] [CrossRef]
- Zhang, J.; Lin, G.; Chen, H.; Wen, S.; Yin, X.; Deng, X. Experiment on Temperature Field Distribution Characteristics of Citrus HLB Far Infrared Heat Treatment. Trans. of the CSAM 2019, 50, 175–188. [Google Scholar]
- Wang, S.; Tang, J. Radio frequency and microwave alternative treatments for insect control in nuts: a review. Agricultural Engineering Journal 2001, 10, 105–120. [Google Scholar]
- Li, Y.; Jiang, S.; Wang, G. Research on Microwave Control of Stem Borer Pests. Chinese Landscape Architecture 1988, 4, 54–58. [Google Scholar]
- Rahi, G.; Rich, J. Potential of microwaves to control plant-parasitic nematodes in soil. Journal of Microwave Power & Electromagnetic Energy 2008, 42, 5–12. [Google Scholar]
- Gaetani, R.; Lacotte, V.; Dufour, V.; et al. Sustainable laser based technology for insect pest control. Scientific Reports 2021, 11, 11068. [Google Scholar] [CrossRef]
- Wang, Y.; Wu, P. Inactivation of Tilletia controversa Kuhn by Cobalt 60- γ radiation. Plant Quarantine 1993, 7, 267–268. [Google Scholar]
- Li, D.; Yuan, X.; Zhang, B.; Zhao, Y.; Song, Z.; Zuo, C. Report of Using Unmanned Aerial Vehicle to Release Trichogramma. Chinese Journal of Biological Control 2013, 29, 455–458. [Google Scholar]
- Bzowska-Bakalarz, M.; Bulak, P.; Bere, P.; et al. Using gyroplane for application of Trichogramma spp. Against the European corn borer in maize. Pest Management Science 2020, 76, 2243–2250. [Google Scholar] [CrossRef]
- Gauthier, P.; Khelifi, M.; Dionne, A.; et al. Technical feasibility of spraying Trichogramma ostriniae Pupae to control the European corn borer in sweet corn crops. Applied Engineering in Agriculture 2019, 35, 185–192. [Google Scholar] [CrossRef]
- Jaber, L.; Ownley, B. Can we use entomopathogenic fungi as endophytes for dual biological control of insect pests and plant pathogens? Biological Control 2018, 116, 36–45. [Google Scholar] [CrossRef]
- Fife, J.; Derksen, R.; Ozkan, H. E.; et al. Evaluation of a contraction flow field on hydrodynamic damage to entomopathogenic nematodes-a biological pest control agent. Biotechnology & Bioengineering 2010, 86, 96–107. [Google Scholar]
- Zhai, E.; Zheng, J.; Zhou, H.; Ru, Y.; Li, J. Effects of flat-fan nozzle wear on application of microbial pesticides. Journal of Forestry Engineering 2018, 3, 109–116. [Google Scholar]
- Yang, B.; Yang, S.; Zheng, W.; Wang, Y. Plant immunity inducers: from discovery to agricultural application. Stress Biology 2022, 2, 5. [Google Scholar] [CrossRef] [PubMed]
- Abid, I.; Laghfiri, M.; Bouamri, R.; et al. Integrated pest management (IPM) for Ectomyelois ceratoniae on date palm. Current Opinion in Environmental Science & Health 2021, 19, 100219. [Google Scholar]
- Wu, S.; Shen, Z.; Fang, M.; et al. Application effect of sex pheromone disorientation on prevention and control of Grapholitha molesta Busck in yellow peach orchard. China Plant Protection 2020, 40, 52–54. [Google Scholar]
- Zhang, J.; Nong, W.; Wang, F. Broad-spectrum pheromone appear in the insect repellent world. China Science Daily 2019-02-12.
- Yu, M.; Tang, H.; Ye, X. Progresses on Wheat Improvement by Using Transgenic and Genome Editing Technologies. Journal of Plant Genetic Resources 2023, 24, 102–116. [Google Scholar]
- Stejskal, V.; Vendl, T.; Aulicky, R.; Athanassiou, C. Synthetic and Natural Insecticides: Gas, Liquid, Gel and Solid Formulations for Stored-Product and Food-Industry Pest Control. Insects 2021, 12, 590. [Google Scholar] [CrossRef]
- Ye, J.; An, Y.; Qian, L.; Yang, X.; Xu, M.; Wu, C.; Wei, C.; Niu, L.; Gan, Y. Development and application of quarantine insect DNA barcoding technology. Chinese Journal of Applied Entomology 2015, 52, 382–389. [Google Scholar]
- National Forestry and Grassland Administration. Technical rules for producing site quarantine of forestry plants. LY/T 1829-2020, The People's Republic of China.
- Van Maanen, A.; Xu, X. Modelling plant disease epidemics. European Journal of Plant Pathology 2003, 109, 669–682. [Google Scholar] [CrossRef]
- Ministry of Agriculture. Regulations on Plant Quarantine. The People's Republic of China,1992.
- Panattoni, A.; Luvisi, A.; Triolo, E. Review. Elimination of viruses in plants: twenty years of progress. Spanish Journal of Agricultural Research 2013, 11, 173–188. [Google Scholar] [CrossRef]
- Van Overbeek, L.; Runia,W. ; Kastelein, P.; Molendijk, L. Anaerobic disinfestation of tare soils contaminated with Ralstonia solanacearum biovar 2 and Globodera pallida. Eur J Plant Pathol 2014, 138, 323–330. [Google Scholar] [CrossRef]
- Deguine, J.; Aubertot, J.; Flor, R.; Lescourret, F.; Wyckhuys, K.; Ratnadass, A. Integrated pest management: good intentions, hard realities. A review. Agronomy for Sustainable Development 2021, 41, 38. [Google Scholar] [CrossRef]
- Zhang, Q.; Ouyang, F.; Ge, F. Quantitative evaluation and case analysis of the economic and ecological benefits of integrated pest control. Chinese Journal of Applied Entomology 2020, 57, 206–213. [Google Scholar]
- Kang, S.; Lumactud, R.; Li, N.; Bell, T.; Kim, H.; Park, S.; Lee, Y. Harnessing Chemical Ecology for Environment-Friendly Crop Protection. Phytopathology 2021, 111, 1697–1710. [Google Scholar] [CrossRef] [PubMed]
- Matteo, D.; Gudrun, S.; Jochen, K.; Ingolf, S. Complementarity among natural enemies enhances pest suppression. Scientific Reports 2017, 7, 8172. [Google Scholar] [CrossRef]
- Gaba, S.; Lescourret, F.; Boudsocq, S.; Enjalbert, J.; Hinsinger, P.; Journet, E.; Navas, M.; Wery, J.; Louarn, G.; Malézieux, E.; Pelzer, E.; Prudent, M.; Ozier-Lafontaine, H. Multiple cropping systems as drivers for providing multiple ecosystem services from concepts to design. Agron. Sustain. Dev. 2015, 35, 607–623. [Google Scholar] [CrossRef]
- Khan, Z.R.; Pickett, J.A.; Van den Berg, J.; Wadhams, L.J.; Woodcock, C.M. Exploiting chemical ecology and species diversity: stemborer and striga control for maize and sorghum in Africa. Pest Management Science 2000, 56, 957–962. [Google Scholar] [CrossRef]
- Pink, D.; Hand, P. Plant resistance and strategies for breeding resistant varieties. Plant Protection Science 2002, 38 (Suppl. 1), 9–13. [Google Scholar] [CrossRef]
- Zou, Y.; de Kraker, J.; Bianchi, F.; Xiao, H.; Huang, J.; Deng, X.; van der Werf, W. Do diverse landscapes provide for effective natural pest control in subtropical rice? Journal of Applied Ecology 2020, 57, 170–180. [Google Scholar] [CrossRef]
- Deguine, J.P.; Aubertot, J.N.; Flor, R.J. Integrated pest management: good intentions, hard realities. A review. Agron. Sustain. Dev 2021, 41, 38. [Google Scholar] [CrossRef]
- Bode, L.E.; Bretthauer, S. Agricultural chemical application technology: a remarkable past and an amazing future. Trans. of the ASABE 2008, 51, 391–395. [Google Scholar] [CrossRef]
- Zheng, J.; Xu, Y. Development and prospect in environment-friendly pesticide sprayers. Trans. of the CSAM 2021, 52, 1–16. [Google Scholar]
- Zheng, J.; Zhang, H.; Xu, Y.; Zhou, H. Development and prospect on performance analysis and measurement techniques of pesticide spraying process. Journal of Forestry Engineering 2022, 7, 1–10. [Google Scholar]
- Matthews, G.; Bateman, R.; Miller, P. Pesticide Application Methods, 4th ed.; John Wiley & Sons: Hoboken, NJ, USA, 2014. [Google Scholar]
- Hu, K.; Zhang, W. Design and experiment of multi-mode hydraulic steering system of high clearance self-propelled sprayer. Trans. of the CSAM 2020, 51, 366–373. [Google Scholar]
- Yuan, H.; Zheng, J.; He, X.; et al. Pesticide Application Technique; Chemical Industry Press: Beijing, China, 2004. [Google Scholar]
- Wang, D.; Chen, Q.; Xu, L.; Zhou, H.; Hou, X. Analysis on Atomization Effect of Thermal Atomization Pesticide for Pulsed Smoker/Fogger. Trans. of the CSAM 2020, 51, 113–122. [Google Scholar]
- Kulkarni, S.; Nyamagoud, R.; Naik, H.; Futane, M. Fabrication of Portable Foot Operated Agricultural Fertilizers and Pesticides Spraying Pump. International Journal of Engineering Research & Technology (IJERT), ISSN: 2278- 0181, 2015, 4. [Google Scholar]
- Zhuang, L.; Li, G.; Qin, W. Development Status of Plant Protection Machinery in China. Agricultural Engineering 2021, 11, 9–13. [Google Scholar]
- Sinha, Y.; Chauhan, Jay. ; Tandan, J.; Patel, K.; Kaushik, S. Development of Multipurpose Battery Operated Wheel Sprayer. International Journal of Current Microbiology and Applied Sciences, ISSN: 2319- 7706, 2019, 8. [Google Scholar]
- Rincón, V.; Sánchez-Hermosilla, J.; Páez, F.; et al. Assessment of the influence of working pressure and application rate on pesticide spray application with a hand-held spray gun on greenhouse pepper crops. Crop Protection 2017, 96, 7–13. [Google Scholar] [CrossRef]
- Alheidary, M.H.R. Performance of knapsack sprayer: effect of technological parameters on nanoparticles spray distribution. International Journal of Engineering Trends and Technology (IJETT) 2017, 46. [Google Scholar]
- Raut, L.P.; Jaiswal, S.B.; Mohite, N.Y. Design, development and fabrication of agricultural pesticides sprayer with weeder. International Journal of Applied Research and Studies 2013, 2. [Google Scholar]
- Singh, S.; Padhee, D.; Sonwani, S.; Sahu, T. Design, Fabrication and Evaluation of Wheel Operated Sprayer. Int.J. Curr. Microbiol. App.Sci. 2020, 9, 1649–1659. [Google Scholar] [CrossRef]
- Sagar, S.B.; Punith, G.; Rakesh, C.N.; Prakash, M.H.; Lakshminarasimha, N. Design and Development of Trolley type Agrochemical Sprayer. Proceedings of the 5th National Conference on Topical Transcend in Mechanical Technology, SJBIT, Bangalore, India, 2017.
- John Deere. Sprayers & Applicators. Available online: https://www.deere.com/en/sprayers/# (Accessed on 2023).
- Wang, X.; Wei, L.; Li, M.; Dong, X.; Huang, W.; Yan, X. Dedsign and Experimental Analysis on the Sugarcane Hanging Type Spray Insecticide Machine of 3WXP - 800 with Tractor. Modern Agricultural Equipment 2016, 55–58, 63. [Google Scholar]
- CropCare. Trailer sprayer. Available online: https://cropcareequipment.com/trailer-sprayers/ (Accessed on 2023).
- Lan, Y.; Chen, S.; Fritz, B.K.; et al. Current status and future trends of precision agricultural aviation technologies. Int. J. Agric. & Biol. Eng. 2017, 10, 1–17. [Google Scholar]
- Yang, L.; Shi, Y.; Feng, H.; Wang, L.; Wang, Z.; Wu, X.; Shi, J.; Dong, N.; Huang, Q. Effect of flight parameters of B-7451 helicopter on distribution pattern of droplet deposition in jujube canopy. Journal of Fruit Science 2019, 36, 338–346. [Google Scholar]
- Jia, Z. Research on aerial spray testing system and spraying flow field for small unmanned aerial vehicle. Thesis for PhD, Nanjing Forestry University, Nanjing, China, 2018.
- Liu, Y.; Ru, Y.; Chen, Q.; et al. Design and test of real-time monitoring system for UAV variable spray. Trans. of the CSAM 2020, 51, 91–99. [Google Scholar]
- Omar, Z.; Idris, N.; Rahim, M.Z. Preliminary Design of Aerial Spraying System for Microlight Aircraft. Journal of Physics: Conf. Series 2017, 914, 012003. [Google Scholar] [CrossRef]
- Ru, Y.; Zheng, J.; Zhou, H.; et al. Electric field distribution produced by circular electrode of induce charging nozzle. Trans. of the CSAE 2008, 24, 119–122. [Google Scholar]
- Gan, Y.; Zheng, X.; Jiang, Z.; et al. Effect of ring electrode structure on spray morphology and droplet charging. Trans. of the CSAM 2019, 50, 387–393. [Google Scholar]
- Yamane, S.; Miyazaki, M. Study on Electrostatic Pesticide Spraying System for Low-Concentration, High-Volume Applications. Japan Agricultural Research Quarterly: JARQ 2017, 51, 11–16. [Google Scholar] [CrossRef]
- Nan, Y. Research on intelligent variable profiling sprayer and mechanism adaptive control based on canopy density detection. Thesis for PhD, Nanjing Forestry University, Nanjing, China, 2020.
- Zheng, J.; Zhou, H.; Xu, Y.; et al. Toward-target precision pesticide application and its system design. Trans. of the CSAE 2005, 21, 67–72. [Google Scholar]
- Hočevar, M.; Širok, B.; Jejčič, V.; et al. Design and testing of an automated system for targeted spraying in orchards. Journal of Plant Diseases and Protection 2010, 117, 71–79. [Google Scholar] [CrossRef]
- Li, L.; He, X.; Song, J.; et al. Design and experiment of automatic profiling orchard sprayer based on variable air volume and flow rate. Trans. of the CSAE 2017, 33, 70–76. [Google Scholar]
- Peterson, D.L.; Hogmire, H.W. Evaluation of tunnel sprayer systems for dwarf fruit trees. Applied Engineering in Agriculture 1995, 11, 817–821. [Google Scholar] [CrossRef]
- Niu, M.; Fang, H.; Qiao, L.; Jian, S.; Zhu, Z.; Peng, Q. Design and experiment of high clearance type recycling tunnel sprayer. Journal of Chinese Agricultural Mechanization 2019, 40, 41–48. [Google Scholar]
- Zhang, T.; Yang, X.; Yan, H.; et al. Anti-drift technology of super-high clearance boom sprayer with air-assisted system. Trans. of the CSAM 2012, 43, 77–86. [Google Scholar]
- Tsay, J.; Fox, R.D.; Ozkan, H.E.; et al. Evaluation of a pneumatic-shield spraying system by CFD simulation. Trans. of the ASAE 2002, 45, 47–54. [Google Scholar] [CrossRef]
- Owen, S.P.; Wise, J.; Grieshop, M.J. Season long pest management efficacy and spray characteristics of a solid set canopy delivery system in high density apples. Insects 2019, 193, 1–22. [Google Scholar]
- Imperatore, G.; Ghirardelli, A.; Strinna, L.; Baldoin, C.; Pozzebon, A.; Zanin, G.; Otto, S. Evaluation of a Fixed Spraying System for Phytosanitary Treatments in Heroic Viticulture in North-Eastern Italy. Agriculture 2021, 11, 833. [Google Scholar] [CrossRef]
- Jiao, X.; Zhang, H.; Zheng, J.; et al. Research progress of intelligent spray machinery based on the phenotype of agricultural and forestry plants. World Forestry Research 2020, 33, 42–46. [Google Scholar]
- Bahlol, H.Y.; Chandel, A.K.; Hoheisel, G.A.; et al. Smart spray analytical system for orchard sprayer calibration: a-proof-of-concept and preliminary results. Trans. of the ASABE 2020, 63, 29–35. [Google Scholar] [CrossRef]
- Chen, Y. Tian, L.F.; Zheng, J. Development of weeding robot based on direct herbicide application method. Trans. of the CSAM 2005, 36, 90–93. [Google Scholar]
- Guzmán, J.L.; Rodríguez, F.; Sánchez-Hermosilla, J.; et al. Robust pressure control in a mobile robot for spraying tasks. Trans. of the ASABE 2008, 51, 715–727. [Google Scholar] [CrossRef]
- Geng, C.; Zhang, J.; Cao, Z.; et al. Cucumber disease toward-target agrochemical application robot in greenhouse. Trans. of the CSAM 2011, 42, 177–180. [Google Scholar]
- Meshram, A.T.; Vanalkar, A.V.; Kalambe, K.B.; Badar, A.M. Pesticide spraying robot for precision agriculture: A categorical literature review and future trends. Journal of Field Robotics 2022. [CrossRef]
- Nasir, F.E.; Tufail, M.; Haris, M.; Iqbal, J.; Khan, S.; Khan, M.T. Precision agricultural robotic sprayer with real-time Tobacco recognition and spraying system based on deep learning. PLoS ONE 2023 18, e0283801. [CrossRef]
- Cantelli, L.; Bonaccorso, F.; Longo, D.; Melita, C.D.; Schillaci, G.; Muscato, G. A Small Versatile Electrical Robot for Autonomous Spraying in Agriculture. AgriEngineering 2019, 1, 391–402. [Google Scholar] [CrossRef]
- Terra, F.P.; Nascimento, G. H. do; Duarte, G. A.; Drews-Jr, P.L.J. Autonomous Agricultural Sprayer using Machine Vision and Nozzle Control. Journal of Intelligent & Robotic Systems. [CrossRef]
- Chaitanya, P.; Kotte, D.; Srinath, A.; Kalyan, K.B. Development of Smart Pesticide Spraying Robot. International Journal of Recent Technology and Engineering (IJRTE) 2020, 8, 2193–2202. [Google Scholar] [CrossRef]
- Douda, O.; Manasova, M.; Zouhar, M.; Hnatek, J.; Stejskal, V. Field Validation of the Effect of Soil Fumigation of Ethanedinitrile (EDN) on the Mortality of Meloidogyne hapla and Carrot Yield Parameters. Agronomy 2021, 11, 208. [Google Scholar] [CrossRef]
- Ito, M.; Ito, K. Establishing targeted control of creeping perennial weeds with soil-active chemical injections: Assessment of subterranean bud responses in contact. Weed Biology and Management 2021, 21, 28–33. [Google Scholar] [CrossRef]
- Fishel, F.M.; Dale, A.G.; Klein, R.W. Pesticide injection and drenching. EDIS 2018. [CrossRef]
- Santra, L.; Furiosi, W.J.; Kundu, A.; Rajaraman, S. A minimally-invasive 3D-printed microneedle array applicator system (μNAAS) for delivery of therapeutics to citrus leaf tissue. Journal of Young Investigators 2021, 39, 60–66. [Google Scholar]
- Jorge, M.G. Sustainable forest management in poplar plantations: Forest Health and Biodiversity. Criteria. Thesis, for PhD, University of Valladolid, Spain, 2012; pp. 163–172.
- Pscheidt J., W. Tree Wound Paints. Available online: https://pnwhandbooks.org/plantdisease/pesticide-articles/tree-wound-paints (accessed on 2023).
- Zheng, J.; Wang, X. Development of tree trunk sprayer. China Forestry Science and Technology 1995, 21–22. [Google Scholar]
- Chen, Y. Research on Autonomous Robot for Weed Control and Smart Spray System based on Variable Rate. Technology. Thesis, for PhD, Nanjing Forestry University, Nanjing, China, 2005. [Google Scholar]
- Zhang, Y.; Gao, S.; Fan, C.; et al. Design and experimental study of control system for spraying bait on bait spraying machine for deratization. Trans. of the CSAE 2014, 30, 66–72. [Google Scholar]
- Stejskal, V.; Vendl, T.; Aulicky, R.; Athanassiou, C. Synthetic and Natural Insecticides: Gas, Liquid, Gel and Solid Formulations for Stored-Product and Food-Industry Pest Control. Insects 2021, 12, 590. [Google Scholar] [CrossRef]
- Wallace, G.P. Advances in Fluid Drilling. HortTechnology 1991, 1, 59–65. [Google Scholar]
- Li, Y.; An, J.; Dang, Z.; et al. Systemic control efficacy of neonicotinoids seeds dressing on English grain aphid (Hemiptera:Aphididae). Journal of Asia-Pacific Entomology 2018, 21, 430–435. [Google Scholar] [CrossRef]
- Brown, V.S.; Erickson, T.E.; Merritt, D.J.; Madsen, M.D.; Hobbs, R.J.; Ritchie, A.L. A global review of seed enhancement technology use to inform improved applications in restoration. Science of the Total Environment 2021, 798, 149096. [Google Scholar] [CrossRef] [PubMed]
- Munro, T.P.; Ritchie, A.L.; Erickson, T.E.; Nimmo, D.G.; Price, J.N. Activated carbon seed technologies provide some protection to seedlings from the effects of post-emergent herbicides. Restor Ecol 2023, 31, e13875. [Google Scholar] [CrossRef]
- Yuan, H.; Qi, S.; Yang, D. Studies on Cloudy-dusting in Plastic Tunnel. Acta Phytophylacica Sinica 2000, 27, 364–368. [Google Scholar]
- Gao, L. Some Problems Relating to Atomization Theory in Plant Protection Machinery. Trans. of the CSAM 1980, 21, 78–88. [Google Scholar]
- Giles, D.K.; Ben-Salem, E. Spray droplet velocity and energy in intermittent flow from hydraulic nozzles. Journal of Agricultural Engineering Research 1992, 51, 101–112. [Google Scholar] [CrossRef]
- Yang, W.; Jia, W.; Ou, M.; Zhong, W.; Jiang, L.; Wang, X. Effect of Physical Properties of an Emulsion Pesticide on the Atomisation Process and the Spatial Distribution of Droplet Size. Agriculture 2022, 12, 949. [Google Scholar] [CrossRef]
- Derksen, R C. ; Bode, L.E. Droplet size comparisons from rotary atomizers. Trans. of the ASAE 1986, 29, 1204–1207. [Google Scholar] [CrossRef]
- Zheng, J.; Xian, F. Research on wind-driven rotary-cage electrostatic spraying technique. Trans. of the CSAM 1990, 21, 55–61. [Google Scholar]
- Panneton, B. Geometry and performance of a rotary cup atomizer. Applied Engineering in Agriculture 2002, 18, 435–441. [Google Scholar] [CrossRef]
- Zhou, L.; Zhang, X.; Lü, X.; et al. Numerical simulation and experimental study on the wind performance of the disc atomizer. Trans. of the CSAM 2012, 43, 72–75. [Google Scholar]
- Lakhiar. I.A.; Gao, J.; Xu, X.; et al. Effects of various aeroponic atomizers (droplet sizes) on growth, polyphenol content, and antioxidant activity of leaf lettuce (Lactuca sativa L.). Trans. of the ASABE 2019, 62, 1475–1487. [Google Scholar] [CrossRef]
- Ru, Y.; Zheng, J.; Zhou, H.; et al. Design and experiment of double-nozzle of aerial electrostatic sprayer. Trans. of the CSAM 2007, 38, 58–61. [Google Scholar]
- Zhai, E.; Zheng, J.; Ru, Y.; et al. Atomization mechanism and numerical simulation of external mixing two-fluid fan nozzle. EKOLOJI 2019, 28, 4277–4288. [Google Scholar]
- Himel, C.M. The optimum size for insecticide spray droplets. J. Econ. Entomol. 1969, 62, 919–926. [Google Scholar] [CrossRef]
- Scott, L.P. Drift of droplets from air-induction nozzles. Trans. of the ASABE 2019, 62, 1683–1687. [Google Scholar]
- Womac, A.R.; Bui, Q.D. Design and tests of a variable-flow fan nozzle. Trans. of the ASAE 2002, 45, 287–295. [Google Scholar] [CrossRef]
- Bode, L.E.; Langley, T.E.; Butler, B.J. Performance characteristics of bypass spray nozzles. Trans. of the ASAE 1979, 22, 1016–1022. [Google Scholar] [CrossRef]
- Giles, D.K.; Comino, J.A. Droplet size and spray pattern characteristics of an electronic flow controller for spray nozzles. J. Agric. Eng. Research 1990, 47, 249–267. [Google Scholar] [CrossRef]
- Kim, S.K.; Ahmad, H.; Moon, J.W.; Jung, S.Y. Nozzle with a Feedback Channel for Agricultural Drones. Applied Sciences 2021, 11, 2138. [Google Scholar] [CrossRef]
- Zhai, E.; Zheng, J.; Gan, Y. Set-up of Wear Measurement for Hydraulic Nozzles. Journal of Chinese Agricultural Mechanization 2013, 34, 189–193. [Google Scholar]
- Rockwell, A.D.; Agers, P.D. Variable rate sprayer development and evaluation. Applied Engineering in Agriculture 1994, 10, 307–333. [Google Scholar] [CrossRef]
- Tian, L.F.; Zheng, J. Dynamic deposition pattern simulation of modulated spraying. Trans. of the ASAE 2000, 43, 5–11. [Google Scholar] [CrossRef]
- Chen, Y.; Zheng, J.; Zhou, H.; et al. R&D of variable rate technology in precision agriculture management system. Trans. of the CSAM 2003, 34, 156–159. [Google Scholar]
- Llorens, J.; Gil, E.; Llop, J.; et al. Variable rate dosing in precision viticulture: Use of electronic devices to improve application efficiency. Crop Protection 2010, 29, 239–248. [Google Scholar] [CrossRef]
- Yan, T.; Zhu, H.; Sun, Li.; et al. Investigation of an experimental laser sensor-guided spray control system for greenhouse variable-rate applications. Trans. of the ASABE 2019, 62, 899–911. [Google Scholar] [CrossRef]
- Fu, J.; Chen, C.; Zhao, R.; Ren, L. Accurate Variable Control System for Boom Sprayer Based on Auxiliary Antidrift System. Journal of Sensors 2020, 1–8. [Google Scholar] [CrossRef]
- Seol, J.; Kim, J.; Son, H. Field evaluations of a deep learning-based intelligent spraying robot with flow control for pear orchards. Precision Agriculture 2022, 23, 712–732. [Google Scholar] [CrossRef]
- Womac, A.; Valcore, D.; Maynard, R. Variable-concentration direct injection from fixed-ratio diluent-driven pumps. Trans. of the ASAE 2002, 45, 1721–1728. [Google Scholar] [CrossRef]
- Vondricka, J.; Lammers, P.S. Real-time controlled direct injection system for precision farming. Precision Agriculture 2009, 10, 421–430. [Google Scholar] [CrossRef]
- Song, H.; Xu, Y.; Zheng, J.; et al. Structural analysis and mixing uniformity experiments of swirling jet mixer for applying fat-soluble pesticides. Trans. of the CSAE 2016, 32, 86–92. [Google Scholar]
- Zhang, Z.; Zhu, H.; Hu, C. Hardware and software design for premixing in-line injection system attached to variable-rate orchard sprayer. Trans. of the ASABE 2020, 63, 823–821. [Google Scholar] [CrossRef]
- Peteinatos, G.G.; Kollenda, B.; Wang, P.; Gerhards, R. A new logarithmic sprayer for dose-response studies in the field. Computers and Electronics in Agriculture, ; 2019, 157, 166–172. [Google Scholar] [CrossRef]
- Chen, Z.; Wang, P. .Experimental study on double-stage on-line jet mixing apparatus. International Journal of Modeling, Simulation, and Scientific Computing 2022, 13, 2142001. [Google Scholar] [CrossRef]
- Liu, X.; Zhou, H.; Zheng, J. Research advances of the technologies for spray drift control of pesticide application. Trans. of the CSAE 2005, 21, 186–190. [Google Scholar]
- Nuyttens, D.; Schampheleire, M.D.; Baetens. K.; et al. Drift from field crop sprayers using an integrated approach: Results of a 5 year study. Trans. of the ASABE 2011, 54, 403–408. [Google Scholar] [CrossRef]
- França, J.A.L.; Cunha, J.P.A.R.da; Antuniassi, U.R. . Spectrum and velocity of droplets of spray nozzles with and without air induction. Engenharia Agrícola, Jaboticabal 2018, 38, 232–237. [Google Scholar] [CrossRef]
- Cui, L.F.; Xue, X.Y.; Ding, S.M.; Le, F.X. Development of a DSP-based electronic control system for the active spray boom suspension. Comput. Electron. Agric. 2019, 166, 1–9. [Google Scholar] [CrossRef]
- He, Y.; Qiu, B.; Yang, Y.; et al. Deformation analysis and control of elastic deformation for spray boom based on finite element model. Trans. of the CSAE 2014, 30, 28–36. [Google Scholar]
- Zhuang, T.F.; Yang, X.J.; Dong, X.; Zhang, T.; Yan, H.R.; Sun, X. Research status and development trend of large self-propelled sprayer booms. Trans. of the CSAM 2018, 49, 189–198. [Google Scholar]
- Ma, L.; Xu, Y.; Zheng, J.; et al. Ecodesign method of intelligent boom sprayer based on preferable Brownfield process. Journal of Cleaner Production 2020, 268, 122206. [Google Scholar] [CrossRef]
- Zheng, J.; Xu, Y. Review and prospect of sensing technologies and wireless sensor networks for precision forestry. Journal of Forestry Engineering 2016, 1, 9–16. [Google Scholar]
- Nan, Y. Research on intelligent variable profiling sprayer and mechanism adaptive control based on canopy density detection. Thesis for PhD, Nanjing Forestry University, Nanjing, China, 2020.
- Duga, A.T.; Ruysen, K.; Dekeyse, R.D.; et al. Spray deposition profiles in pome fruit trees: effects of sprayer design, training system and tree canopy characteristics. Crop Protection 2015, 67, 200–213. [Google Scholar] [CrossRef]
- Al-Gaadi, K.A.; Paul, D.A. Integrating GIS and GPS into a spatially variable rate herbicide application system. Applied Engineering in Agriculture 1999, 15, 255–262. [Google Scholar] [CrossRef]
- Zhang, H.; Zheng, J.; Xu, Y. Study of auto disturbance rejection synchronous control for bilateral hydraulic motor of concept sprayer chassis. Journal of China Agricultural University 2017, 22, 135–143. [Google Scholar]
- Liu, L.; Pan, Y.; Chen, Z.; et al. Inter-rows navigation method for corn crop protection vehicles under high occlusion environment. Trans. of the CSAM 2020, 51, 11–17. [Google Scholar]
- Scott, L.P.; Rory, L.R. A review of the effects of droplet size and flow rate on the chargeability of spray droplets in electrostatic agricultural sprays. Trans. of the ASABE 2018, 61, 1243–1248. [Google Scholar]
- Xie, C.; He, X.; Song, J.; et al. Comparative research of two kinds of flat fan nozzle atomization process. Trans. of the CSAE 2013, 29, 25–30. [Google Scholar]
- Dodge, L.G. Comparison of performance of drop-sizing instruments. Applied Optics 1987, 26, 1328–1341. [Google Scholar] [CrossRef]
- Zhao, J.; Nie, W.; Lin, W.; et al. Research progress of optical measurement of particle size in spray. Laser Technology 2019, 43, 702–707. [Google Scholar]
- Zheng, J. Computer-aided laser imaging droplet sizing system. Computer Automated Measurement & Control 2000, 8, 16–17. [Google Scholar]
- Luck, J.D.; Shearer, S.A.; Sama, M.P. Development and preliminary evaluation of an integrated individual nozzle direct injection and carrier flow rate control system for pesticide applications. Trans. of the ASABE 2019, 62, 505–514. [Google Scholar] [CrossRef]
- Dai, X.; Xu, Y.; Chen, J.; et al. Evaluation of mixing uniformity for inline mixers by image processing. Trans. of the ASABE 2020, 63, 429–443. [Google Scholar] [CrossRef]
- Yang, W.; Jia, W.; Ou, M.; Zhong, W.; Jiang, L.; Wang, X. Effect of Physical Properties of an Emulsion Pesticide on the Atomisation Process and the Spatial Distribution of Droplet Size. Agriculture 2022, 12, 949. [Google Scholar] [CrossRef]
- Price, R.R. A low-cost spot laser and camera system for fluorescent dye detection of agricultural aircraft pattern collection strings. Applied Engineering in Agriculture 2018, 34, 187–193. [Google Scholar] [CrossRef]
- Shi, Q.; Mao, H.; Guan, X. Numerical simulation and experimental verification of the deposition concentration of an unmanned aerial vehicle. Applied Engineering in Agriculture 2019, 35, 367–376. [Google Scholar] [CrossRef]
- Zheng, J.; Xian, F.; Gao, L. Review on Measurement of Electrostatic Spraying Charge-to-Mass Ratio. Journal of Jiangsu Institute of Technology 1992, 13, 1–6. [Google Scholar]
- Zheng, J.; Xian, F.; Gao, L.; et al. Charge attenuation pattern of charged droplets. Trans. of the CSAM 1993, 24, 33–36. [Google Scholar]
- Dai, S.; Zhang, J.; Jia, W.; Ou, M.; Zhou, H.; Dong, X.; Chen, H.; Wang, M.; Chen, Y.; Yang, S. Experimental Study on the Droplet Size and Charge-to-Mass Ratio of an Air-Assisted Electrostatic Nozzle. Agriculture 2022, 12, 889. [Google Scholar] [CrossRef]
- Gil, E.; Balsari, P.; Gallart, M.; et al. Determination of drift potential of different flat fan nozzles on a boom sprayer using a test bench. Crop Protection 2014, 56, 58–68. [Google Scholar] [CrossRef]
- Richardson, B.; Rolando, C.A.; Kimberley, M.O. Quantifying spray deposition from a UAV configured for spot spray applications to individual plants. Trans. of the ASABE 2020, 63, 1049–1058. [Google Scholar] [CrossRef]
- Schramm, M.W.; Hanna, H.M.; Darr, M.J.; et al. Measuring sub-second wind velocity changes for agricultural drift one meter above the ground. Applied Engineering in Agriculture 2019, 35, 697–704. [Google Scholar] [CrossRef]
- Jomantas, T.; Lekavičienė, K.; Steponavičius, D.; Andriušis, A.; Zaleckas, E.; Zinkevičius, R.; Popescu, C.V.; Salceanu, C.; Ignatavičius, J.; Kemzūraitė, A. The Influence of Newly Developed Spray Drift Reduction Agents on Drift Mitigation by Means of Wind Tunnel and Field Evaluation Methods. Agriculture 2023, 13, 349. [Google Scholar] [CrossRef]
- Kasner, E.J.; Fenske, R.A.; Hoheisel, G.A.; Galvin, K.; Blanco, M.N.; Seto, E.Y.W.; Yost, M.G. Spray Drift from a Conventional Axial Fan Airblast Sprayer in a Modern Orchard Work Environment. Annals of Work Exposures and Health 2018. [Google Scholar] [CrossRef] [PubMed]
- Wang, L.; Song, W.; Lan, Y.; Wang, H.; Yue, X.; Yin, X.; Tang, Y. A Smart Droplet Detection Approach With Vision Sensing Technique for Agricultural Aviation Application. IEEE Sensors Journal 2021, 21, 17508–17516. [Google Scholar] [CrossRef]
- Massinon, M.; De Cock, N.; Forster, W.A.; et al. Spray droplet impaction outcomes for different plant species and spray formulations. Crop Protection 2017, 99, 65–75. [Google Scholar] [CrossRef]
- Liu, D.; Zhou, H.; Zheng, J.; et al. Oblique impact behavior of spray droplets on tea tree leaves surface. Trans. of the CSAM 2019, 50, 96–103. [Google Scholar]
- Dorr, G.J.; Wang, S.S.; Mayo, L.C.; et al. Impaction of spray droplets on leaves: influence of formulation and leaf character on shatter, bounce and adhesion. Experiments in Fluids 2015, 56, 1–17. [Google Scholar] [CrossRef]
- Nairn, J.J.; Forster, W.A.; Van Leeuwen, R.M. Quantification of physical (roughness) and chemical (dielectric constant) leaf surface properties relevant to wettability and adhesion. Pest Management Science 2011, 67, 1562–1570. [Google Scholar] [CrossRef] [PubMed]
- Sharpe, S.M.; Boyd, N.S.; Dittmar, P.J.; et al. Spray penetration into a strawberry canopy as affected by canopy structure, nozzle type, and application volume. Weed Technology 2018, 32, 80–84. [Google Scholar] [CrossRef]
- Boukhalfa, H.H.; Massinon, M.; Belhamra, M.; et al. Contribution of spray droplet pinning fragmentation to canopy retention. Crop Protection 2014, 56, 91–97. [Google Scholar] [CrossRef]
- Teske, M.E.; Thistle, H.W.; Riley, C.M.; et al. Laboratory measurements of evaporation rate of droplets at low relative wind speed. Trans. of the ASABE 2018, 61, 919–923. [Google Scholar] [CrossRef]
- Sama, M.P.; Weiss, A.M.; Benedict, E.K. Validating spray coverage rate using liquid mass on a spray card. Trans. of the ASABE 2018, 61, 887–895. [Google Scholar] [CrossRef]
- Scott, L.P.; Hewitt, A.J. Flat-fan spray atomization model. Trans. of the ASABE 2018, 61, 1249–1256. [Google Scholar]
- Luca, M.D.; Vallet, A. Pesticide atomization modelling for hollow cone nozzle. Agricultural Engineering International: the CIGR Ejournal, ALNARP08012, X, 2008.
- Lafferty, C.L.; Tian, L.F. Using computation fluid dynamics to determine the effect of internal nozzle flow on droplet size. ASAE International Annual Meeting, Sacramento, CA, USA, 29-08-2001.
- Liu, C.; Zheng, J.; Wang, K. Prediction model for atomization performance of electrostatic spraying nozzle. Trans. of the CSAM 2009, 40, 63–68. [Google Scholar]
- Zhao, C.; Chai, S.; Chen, L.; et al. Establishment and experiment of quadratic residual compensation atomization model of electricity atomizer. Trans. of the CSAM 2020, 51, 19–27. [Google Scholar]
- Chen, Y.; Zheng, J. Control system for precision pesticide application based on variable rate technology. Trans. of the CSAE 2005, 21, 69–72. [Google Scholar]
- Zhai, C.; Wang, X.; Mi, Y.; et al. Nozzle flow model of PWM variable-rate spraying. Trans. of the CSAM 2012, 43, 40–44. [Google Scholar]
- Song, H.; Xu, Y.; Zheng, J.; et al. . Simulation optimization analysis of shrinking tube pitch and splitter position of rotating jet mixer. J. Agric. Sci. Tech. 2019, 21, 84–89. [Google Scholar]
- Sidahmed, M.M.; Brown, R.B. Simulation of spray dispersal and deposition from a forestry airblast sprayer-part II: Droplet trajectory model. Trans. of the ASAE 2001, 44, 5–17. [Google Scholar] [CrossRef]
- Lebeau, F. Modelling the dynamic distribution of spray deposits. Biosys. Eng. 2004, 89, 255–265. [Google Scholar] [CrossRef]
- Delele, M.A.; Moor, A.De.; Sonck, B.; et al. . Modeling and validation of the air flow generated by a cross flow air-sprayer as affected by travel speed and fan speed. Biosys. Eng. 2005, 92, 165–174. [Google Scholar] [CrossRef]
- Fu, Z.; Wang, J.; Qi, L.; et al. . CFD simulation and experimental verification of air-velocity distribution of air-assisted orchard sprayer. Trans. of the CSAE 2009, 25, 69–74. [Google Scholar]
- Sun, G.; Wang, X.; Ding, W.; et al. . Simulation analysis on characteristics of droplet deposition base on CFD discrete phase model. Trans. CSAE 2012, 28, 13–19. [Google Scholar]
- Zhang, H.; Zhou, H.; Zheng, J.; et al. . Spray nozzle atomization performance and droplet deposition visual model. J. Forestry Engineering 2016, 1, 34–42. [Google Scholar]
- Ru, Y.; Jia, Z.; Zhou, H.; et al. Research on moving trajectory simulation of charged droplets. Chin. Agric. Mechan. 2011, 51–55. [Google Scholar]
- Yuan, J.; Liu, X.; Zhang, X.; et al. . Modeling and compensation for characteristic of droplet drift on air-assisted boom spraying accounting for wind speeds. Trans. of the CSAE 2013, 29, 45–52. [Google Scholar]
- Baetens, K.; Nuyttens, D.; Verboven, P.; et al. . Predicting drift from field spraying by means of 3D computational fluid dynamics model. Computers Electron. Agric. 2007, 56, 161–173. [Google Scholar] [CrossRef]
- Hong, S.-w.; Park, J.; Jeong,H. ; Lee, S.; Choi, L.; Zhao, L.; Zhu, H. Fluid Dynamic Approaches for Prediction of Spray Drift from Ground Pesticide Applications: A Review. Agronomy 2021, 11, 1182. [Google Scholar] [CrossRef]
- USEPA. Models for pesticide risk assessment. Available online: https://www.epa.gov/pesticide-science-and-assessing-pesticide-risks/models-pesticide-risk-assessment (accessed on 27-12-2020).
- Teske, M.E.; Thistle, H.W.; Fritz, B.K. Modeling aerially applied sprays: an update to AGDISP model development. Trans. of the ASABE 2019, 62, 343–354. [Google Scholar] [CrossRef]
- Mercer, G.N.; Sweatman, W.L.; Forster, W.A. A model for spray droplet adhesion, bounce or shatter at a crop leaf surface. Mathematics in Industry 2010, 15, 945–951. [Google Scholar]
- Dorr, G.J.; Kempthorne, D.M.; Mayo, L.C.; et al. Towards a model of spray–canopy interactions: Interception, shatter, bounce and retention of droplets on horizontal leaves. Ecological Modelling 2014, 290(C), 94-101.
- Mayo, L.C. Mathematical modelling of the impaction and spreading of spray droplets on leaves. Thesis for PhD, Queensland University of Technology, Brisbane, Australia, 2015.
- Ru, Y.; Hu, C.; Chen, X.; Yang, F.; Zhang, C.; Li, J.; Fang, S. Droplet Penetration Model Based on Canopy Porosity for Spraying Applications. Agriculture 2023, 13, 339. [Google Scholar] [CrossRef]
- De Lima Junior, I. dos S.; Degrande, P.E.; de Souza, C.M.A. Droplet distribution as a function of cotton interrow spacing and angles of sprayer displacement. Engenharia Agrícola, Jaboticabal 2018, 38, 927–933. [Google Scholar] [CrossRef]
- Souza, F.G.; Portes, M.F.; Silva, M.V.; Teixeira, M.M.; Furtado Júnior, M.R. Impact of sprayer drone flight height on droplet spectrum in mountainous coffee plantation. Brazilian Journal of Agricultural and Environmental Engineering 2022, 26, 901–906. [Google Scholar] [CrossRef]
- Tsagkaris, A.S.; Pulkrabova, J.; Hajslova, J. Optical screening methods for pesticide residue detection in food matrices: advances and emerging analytical trends. Foods 2021, 10, 88. [Google Scholar] [CrossRef]
- Mirghafouri, M.R.; Abbasi-Moayed, S.; Ghasemi, F.; et al. Nanoplasmonic sensor array for the detection and discrimination of pesticide residues in Citrus fruits. Analytical Methods 2020, 12, 5877–5884. [Google Scholar] [CrossRef] [PubMed]
- Campos, J.; Llop, J.; Gallart, M.; García-Ruiz, F.; Gras, A.; Salcedo, R.; Gil, E. Development of canopy vigour maps using UAV for site-specific management during vineyard spraying process. Precision Agriculture 2019. [CrossRef]
Figure 1.
Plant protection Methods and pesticide application technologies.
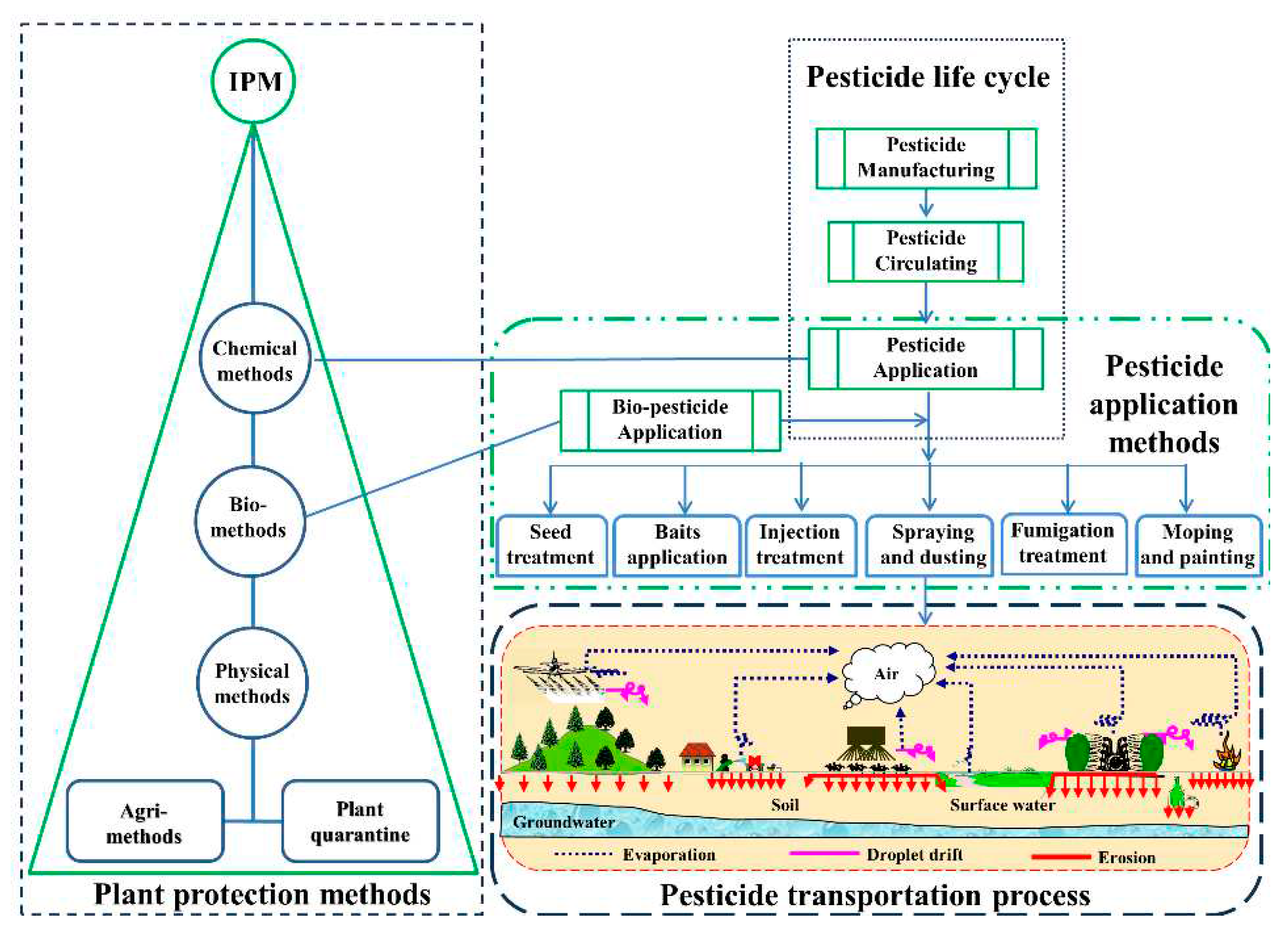
Figure 2.
Plant protection Methods and subdivision measures.
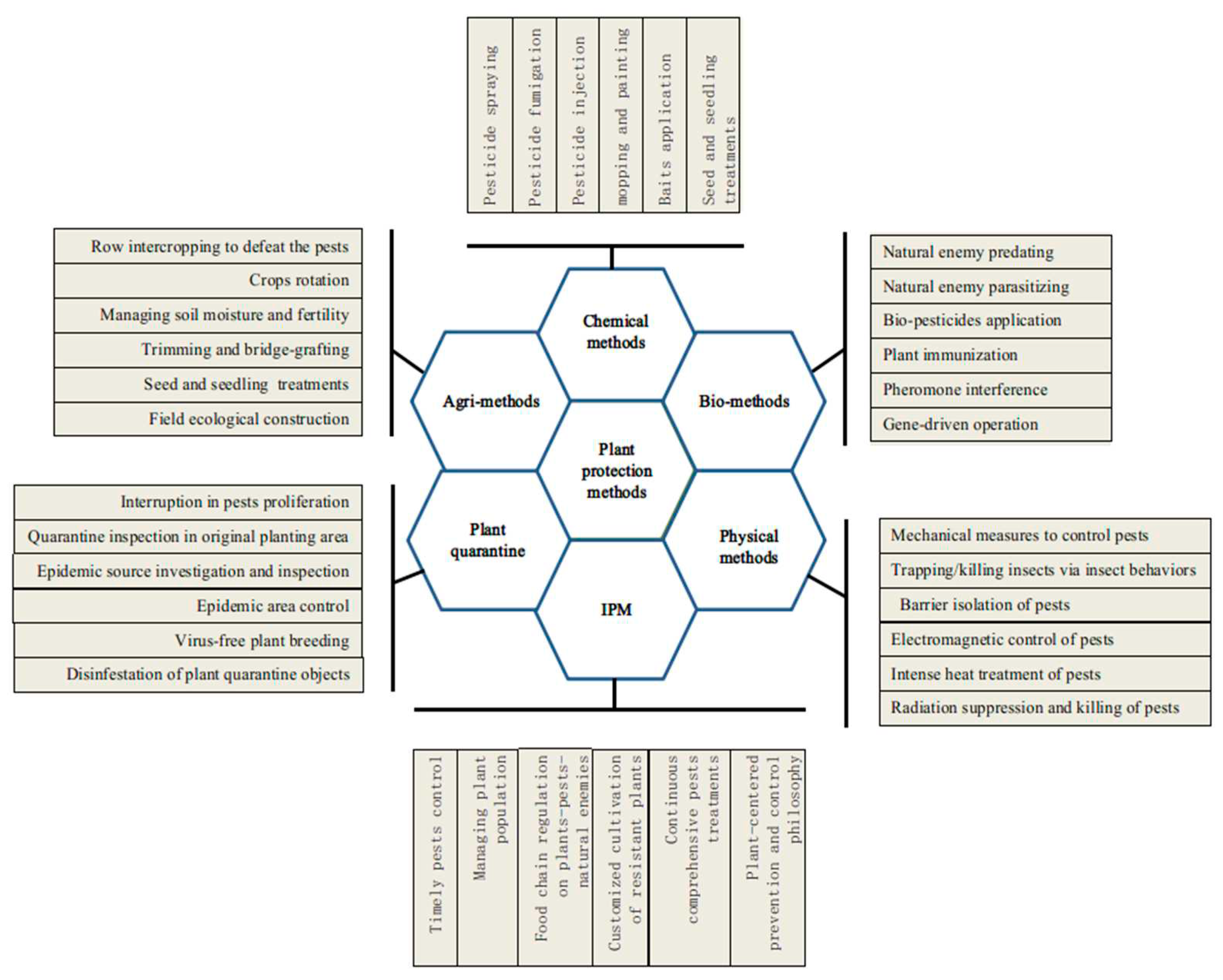
Figure 3.
Timeline of major developments in pesticide application technology.
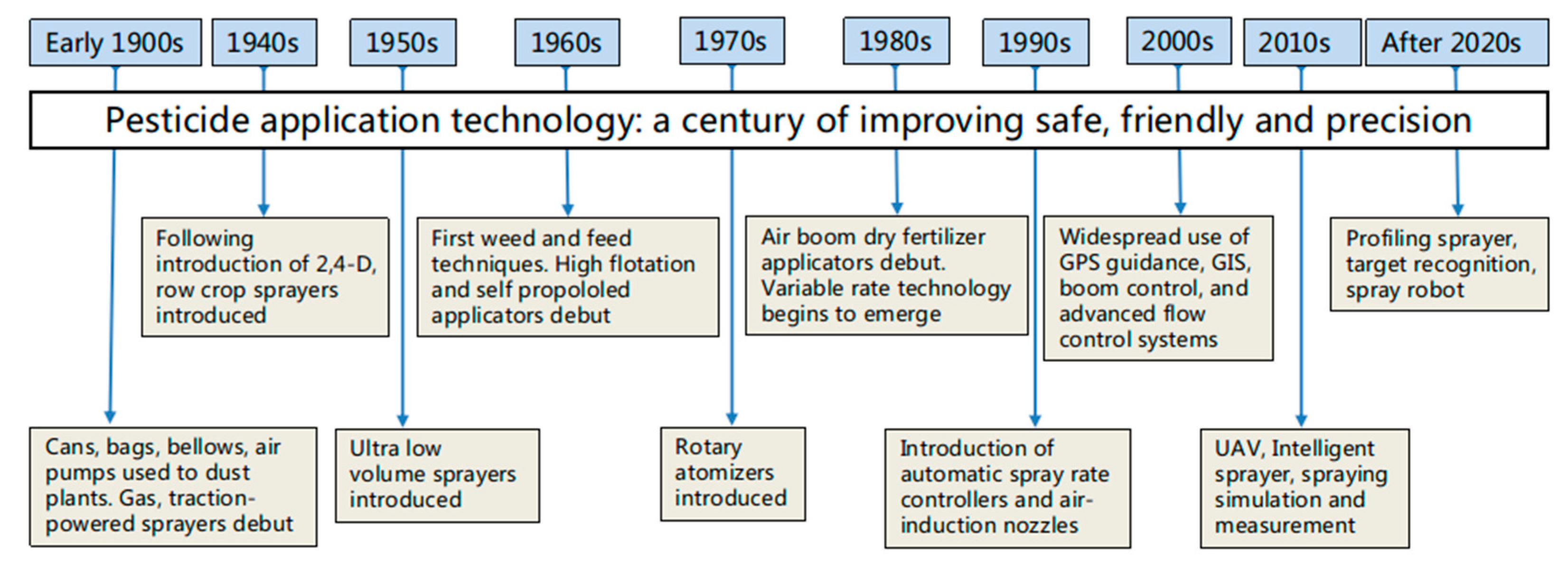
Figure 4.
Comprehensive performance analysis diagram of pesticide spraying process.
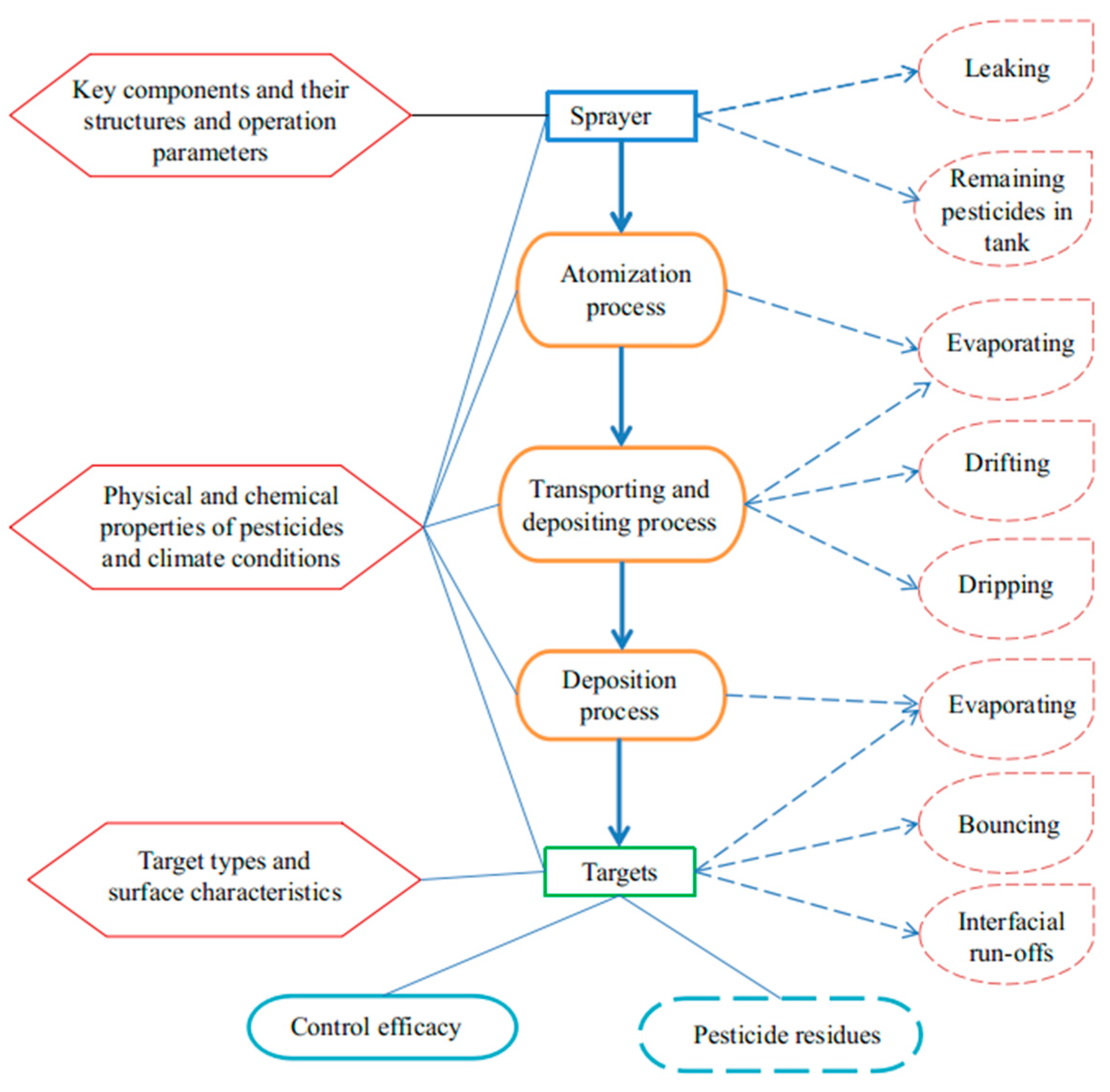

Table 1.
List of ancient agricultural books of the Chinese Nation cited in the paper.
| Book name | Author(s) | Written Dynasty | Cited with keywords | |
| 1 | Zhou Rites | Duke of Zhou | Zhou Dynasty ( 1046-256 BCE) | Fumigating the pests |
| 2 | The Book of Songs•Xiaoya•Datian | Anonymity | Classification of pests Getting rid of the pests |
|
| 3 | Master Lü’s Spring and Autumn Annals•Buqu | Zuo Qiuming, Lü Buwei |
Warring States Period (c. 481-221 BCE) | Killing the locusts |
| 4 | Master Lü’s Spring and Autumn Annals•Rendi | Avoiding weeds or insects through deep cultivation etc |
||
| 5 | Master Huainan•Main Skilling, Garden of Eloquence•Xiuwen |
Liu An, Liu Xiang |
Han Dynasty (202BCE-220AD) | Timely prevention, survival rights of insects |
| 6 | Works of Fan Shengzhi | Fan Shengzhi | Seed treatment | |
| 7 | Discourses Weighed in the Balance•About Insects | Wang Chong | Soil moisture management for killing insects |
|
| 8 | Annotation for the Zhou Rites | Zheng Xuan | Using illicium anisatum to kill insects with fumigating |
|
| 9 | Book of Southern Vegetation | Ji Han | Jin Dynasty (266-420) | Natural enemy to kill insects |
| 10 | Important Arts for the Peoples Welfare | Jia Sixie | Northern Wei Dynasty(386-534) | Using burning sun to control pests |
| 11 | Biographies in the Southern Dynasties | Li Yanshou | Tang Dynasty (618-907) | Natural enemy of pests |
| 12 | The Imperial Decree for Catching Locusts | Zhao Xu, Song Emperor |
Song Dynasty (960-1279) | Law on locust control |
| 13 | Book on Agriculture by Wang Zhen | Wang Zhen | Yuan Dynasty (1271-1368) | Eliminating weeds |
| 14 | Complete Treatise on Agriculture | Xu Guangqi | Ming Dynasty (1368―1644) | Using lime and Tung oil to kill pests |
| 15 | On Agriculture | Ma Yilong | Soil and water management | |
| 16 | Shen's Treatise on Agriculture•Land Administration Rules | Shen, name unknown |
Examining and scraping off pests | |
| 17 | Outlines of Agriculture•Principles of Cultivating Crops | Yang Shen, Zheng Shiduo | Qing Dynasty (1616-1912) | Suitable soil and water management |
Table 2.
Pesticide spraying machinery types.
| Classification basis | Name | Explanations of measures and references |
| By spraying medium | Sprayer | Pesticide sprayer is the most important plant protection machinery at present which disperse the pesticides into droplets to deposit the targets[1,70,73,74]. |
| Duster | Pesticide duster generates an airflow or uses electrostatic charging to carry the low concentration or diluted pesticide powders on the targets[1,75]. | |
| Fogger | There are two types of pesticide foggers, normal-temperature fogger (like aerosol sprayer) and thermal fogger, which generally produce very fine fogging droplets for improving the pest control efficiency [1,76]. | |
| Bio-pesticide sprayer | Bio-pesticide sprayer is applied to spray the fragile biological pest control agents for ensuring the high viability[1,47]. | |
| By driven power source | Manual-operated | The manual-operated means include hand-pressure, pedal-operated, rocker-armed etc.[77]. |
| Animal-powered | The animal-powered means include livestock-driven or horse-drawn[78]. | |
| Electric-driven | The electric-driven means is generally battery-powered, which will have more potential applications in plant protection [79]. | |
| Engine-driven | The engine-driven means apply combustion engine which are mostly applied currently in plant protection[16,74]. | |
| Others | The helium or hydrogen balloon to spray pesticides was reported from China Global Television Network (CGTN) . | |
| By carrier platform | Portable | Portable platforms include hand-held [80], backpack or knapsack[81,82], hand-push wheel-operated[83], trolley type[84] and other manual platforms. |
| Ground vehicle | Ground mounted platforms include tractor mounted [85], 3pt.mounted with tractor [86], trailer [87], and high clearance self-propelled[74] etc.. | |
| Airborne platform (aerial application) | Aviation platforms include fixed-wing aircraft[88], helicopter [89], and plant protection UAVs [90,91], and micro aircraft[92]etc.. | |
| By function | Toward-target | Toward-target sprayers include electrostatic sprayer[93,94,95], profiling sprayer[96,97,98,99], tunnel sprayer[100,101]. |
| Anti-drift | Anti-drift sprayers include air-assisted sprayer[102], shielded sprayer[103], recycling tunnel sprayer [101], and fixed spraying system [104,105]etc.. | |
| Intelligent | With the development of sensors, AI and other technologies, intelligent sprayers [106,107], plant protection robots and spraying robots[108,109,110,111,112,113,114,115] are widely developed. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



