
Submitted:
18 October 2023
Posted:
19 October 2023
You are already at the latest version
Abstract
Rising fuel costs, significant air pollution, and the need to mitigate the negative consequences of oil consumption have diminished the relevance of traditional vehicles. This shift encourages the adoption of safer, more efficient, and eco-friendly transportation alternatives, such as fuel cell, electric, and hybrid vehicles. Brushless direct current motors are gaining popularity due to their high efficiency, power factor, torque, and controllability. By 2030, Brushless Direct Current motors are expected to replace conventional motors as the standard for power transfer, especially in dynamic applications like automobiles, more electric aircraft. This study explores a control technique to improve real-time control of brushless direct current motors in electric vehicles It presents speed control of these system for electric vehicle applications and an overview of electric vehicle technologies. A model for the 120-degree mode was developed using electrical and mechanical equations in MATLAB/Simulink. Three scenarios were examined to assess the potential of controlling brushless direct current motors using constant and dynamic speed and torque. The actual value reached the reference value in the first two scenarios.
Keywords:
brushless direct current motors
; current control
; pulse width modulation
; speed control of BLDC motors
; more electric aircraft
1. Introduction
The world is headed toward the creation using technologies to produce energy from renewable sources, and technologists are working incredibly difficult to address challenges like the scarcity in the use of fuels and clean/renewable energy as a result of the growth in world population and energy use due to improved lifestyles environmental issues like high energy prices, global warming, and others concern [1]. We will concentrate on various storage methods, which are at the heart of the technological advancements required to plan and create green energy.
We have emphasized the key characteristics which compared the power/energy density, cost to meet the worldwide demand and other characteristics of each of these technical issues. The capacity to control the limited availability of current resources and the competitiveness to achieve sustainability criteria [2]. Because of their straightforward design, high torque output, extended lifespan, and high efficiency, brushless DC motors (BLDCM) have found extensive use in industrial automation, home appliances, automobile other, electronics, and aerospace industries. However, obtaining correct information about rotor location and speed is crucial to controlling it [3]. After decades of study by academics domestically and internationally, certain advances have been made in the investigation of brushless DC motor non-position control technology. Using a counter-electromotive force, which is now the most developed in use, can detect the signal of the counter-electromotive force derived from the voltage at the motor terminals and acquire commutation information with a 300-ms time delay. Yet, detecting it is challenging; the presence of the phase shift issue is solved using a filter circuit. at high speed is more significant and even has the potential to cause commutation failure at low speeds due to the counter electromotive force [4].
Electric vehicles have historically used various electric motor types as their propulsion technology. They include a permanent magnet brushless. Brushed DC motor, induction motor (IM), switching reluctance motor (SRM), and BLDC motor. The motor types and drives used in EVs have thus been reviewed. Choosing the best electric motor drives for applications in EVs, a comparative analysis of the efficiency, cost, maximum speed, and reliability of switching resistance motors, induction motors, constant magnet motors, and DC motors to determine the best electric motor drivers for applications involving EVs, research on and axial flux permanent magnet brushless dc motors is being done. Our studies indicate that the preferred option for electric vehicle motor drives is motor drivers for brushless dc motors with axial flux [5].
Brushless DC motors have an expanded speed range, greater dependability, and efficiency. Biomedical and robotic applications [6] necessitate a strong torque-to-weight ratio and accurate position control for precision since BLDC motors are widely used in various industrial and consumer durables due to their distinct properties. In contrast to its AC and DC counterparts, the BLDC motor may thus be considered a suitable solution [7]. The obstacle, however, is electronic commutation in BLDC motors, which results in torque ripple [8] due to incorrect position sensor positioning. Based on feedback from the rotor position, electronic commutation is used for BLDC motors instead of mechanical commutation. It is possible whether this feedback is sensor-based or sensor-free. It is position sensors vulnerable to changes in physical parameters, including temperature, pressure, and humidity. Hence, it has become more popular to use sensorless rotor position detection [8,9]. The key sensor-less methods are the artificial intelligence-based strategy, the back EMF approach, the Flux Linkage approach, the inductance approach, and the technique based on back EMF.
Due to its inherent advantages of having a straightforward structure and reliable operation, the control using the proportional integral and derivative (PID) method is frequently employed within the industry [10]. Over 95% of industrial closed-loop controllers are PID or PI-based. Even in the current environment [11], however, due to the nonlinear nature of the latter, this controller is not thought to be appropriate for BLDC motors. Since 1918, electric vehicles (EVs) have been a possibility [12,13,14,15,16].
Since then, the employment of electric vehicles for road transportation has significantly decreased due to the quick internal combustion engine (ICE) development and viability. However, current issues with air pollution, a shortage of petroleum supplies, and their significant price increase, as well as energy independence, have prompted a reorganization of using electric vehicles as a substitute for other modes of transportation. Electric vehicle applications in the 20th century frequently utilized both drives with variable speeds for both DC and AC. Figure 1 shows the EV motor classification.
However, in the twenty-first century, permanent magnet brushless direct current (PMBLDC) motors were launched thanks to the accessibility of materials for rare earth permanent magnets of the highest quality as the metal’s samarium cobalt (Sm-Co) and neodymium-iron-boron (Nd-Fe-B), which has high efficiency and power density [17,18,19,20]. Instead of brushes like a DC motor, the electrical motor uses the PMBLDC commutation. Nevertheless, electrical commutation makes the control algorithm difficult [21,22,23].
However, the few benefits of a PMBLDC motor include improved efficiency, excellent torque-to-speed features, a high power-to-size output ratio, quick dynamic performance, and quiet operation. PMBLDC motor drives have grown to be quite appealing for EV applications [24,25,26,27]. System Integration (SI) and Optimization are the two most crucial considerations in EV design. To achieve dependable performance and affordable EVs, this is necessary.
Three components make up the design concept for an electric vehicle (EV), including advanced technologies that can boost the vehicle's performance. Yet these technologies must be chosen from current engineering in chemical, mechanical, automotive, electrical, and electronic fields. Employing a unique design, particularly concerning EVs, and approaches from the automotive industry that are appropriate for EVs [28]. The load is the BLDC motor. With the suggested BLDC motor converter control with AC operating at unity power factor mains is made possible. This improves operational effectiveness [29]. An inside-out DC motor is a brushless DC (BLDC) motor. that lacks the brushes needed for commutation. The stator and rotor have three-phase armature windings attached. is made of permanent magnets. Hence, the motor is maintenance-free, tough, and strong since there are no brushes, making it perfect for industrial applications. BLDC motors have a low moment of inertia, high efficiency, and high volumetric torque thanks to the rotor's fixed magnetic field and the permanent magnets installed. [30].
PWM (pulse width modulation) and control of the hysteresis current, which is related to continuous control theory, are two of the most often utilized control approaches for BLDC motors, as detailed in [31,32,33]. The sensor-less BLDC motor drive with a high speed is demonstrated and is fed through a constant dc supply that concentrates on producing a virtual back-emf for the third harmonic. Suppose the motor is fed directly sourced from the grid. It is necessary to evaluate the grid's input power quality. The different methods created in [34,35] are mostly concentrated on the control portion after the converter, which employs either a three-stage or a constant dc source inverter, for applications where the motor needs to receive its power straight from the grid. Various motors' efficiency comparisons are displayed in Table 1 by electric vehicle manufacturing. When compared to other motors, BLDC motors will operate more efficiently. Brushless DC motors (BLDCMs) provide several benefits in addition to their straightforward design, dependable operation, and ease of maintenance, including high DC motor efficiency, no excitation loss, and effective speed regulation [36]. The conventional drive's DC link mechanism within these motors uses electrolytic capacitors with a high capacity. These capacitors lack the necessary stability because of their electrolyte liquid and sensitivity to temperature and are typically among the first components in the drives to experience issues like high temperature or voltage, exploding, or leaking under pressure. Electrolytic capacitors, unfortunately, are the root of failures in electric drive systems in 60% of cases [37].
BLDC motors are employed in a growing number of applications because of their high efficiency, high power factor, strong torque, and ease of control. In dynamic applications like EVs, BLDC motors are typically favored. In this paper, there are main contributions:
- A method of control has been created to enhance the real-time control of BLDC motors for electric vehicles.
- Implementing a BLDC motor speed control for electric automobile applications and explaining electric vehicle technology.
- A model was created for the 120-degree mode using electrical and mechanical equations using MATLAB/Simulink.
- Investigate three scenarios for the possibility of controlling BLDC motors by using constant and dynamic speed and torque.
- The proposed control techniques are studied and tested on the MATLAB software platform and experimental lab.
- A test bench was created to thoroughly improve power electronics and real-time control of the BLDC motor, especially with regard to PWM approaches, signal generation, and speed control in both theory and practice.
- Implementation of the control schemes uses both soft switching and hard switching PWM approaches.
- The BLDC platform controls the Arduino motors to produce a PWM signal with a duty cycle of 0% to 100% and a frequency of 50Hz.
- Using the identical circuit settings used for simulation, an experimental prototype was put into practice to validate the simulation results. The gate pulses are generated with a time delay to prevent short circuits during switch operation.
2. Materials and Methods
2.1. Types of BLDC Motor
The stator and rotor are the two components that make up a BLDC motor. Figure 2 depicts the classification of types of BLDC motors. The motor could be built in a variety of ways, including with two rotors, one inside the other. The outer rotor-designed BLDC motor is covered in [38]. The stator windings are kept stationary inside, while at the outside surface, a permanent magnet is inserted in the rotor. The motor's output torque and the outer rotor BLDC improve power density. Drones, variable-drive industries, water pumps, electric cars, and home electronics are the principal applications for the BLDC motor's outer rotor. the distance in airgap between the stator and the rotor is reduced while designing an outer rotor BLDC motor [39] and current-dependent torque capacity will increase. To improve the stability of the rotor, structural components are introduced [40]. With these, motor abilities in dynamic situations are improved.
Compared to other motors, BLDC motors are expected to have higher efficiency, higher torque-to-weight ratio, and lower operating noise [5]. These machines have a fixed magnetic flux between the rotor and stator, which prepares the motor to operate at unity power factor. A BLDC motor is powered by an electronically commutated motor drive. Each phase of the motor is controlled by closed-loop control. The primary purpose of a closed-loop controller is to supply current pulses to the motor windings to control speed and torque. This is because both are complementary phenomena in motors. BLDC motors are driven with high precision and wear more under load conditions [41,42,43,44,45,46,47,48,49,50].
BLDC motor is an electronically commutated device comparable to an AC synchronous machine. It produces trapezoidal back emf, and depending on where the hall sensors are located in the motor's stator, the two stator windings are stimulated during each condition. The rotor magnet position will be detected through sensors. Anytime the rotor poles come into proximity to the hall sensors, high or low signals are generated. The precise commutation sequence is determined using the combination of hall sensors. The windings of the BLDC motor stator need to be activated sequentially to rotate [41]. Table 1 summarizes comparison talks based on in-wheel technology and motor specifications:
The induction motor, according to comparison results, is the most durable of all the motors under extreme conditions; however, due to its restricted speed range, weak dynamic response, motor slip at low speeds, and low efficiency at high speeds, for high-performance electric vehicles, it is not a good solution.
2.2. Mathematical modeling of a BLDC motor
The permanent magnet-mounted stainless-steel rotor of three-phase symmetrical windings is present in the BLDC motor. Rotor current is disregarded as a result of the high resistance of permanent magnets and stainless steel [42]. As shown in Figure 3, the basic equation determining a BLDC motor's armature voltage equation is as follows:
Three-phase synchronous motor modeling can be used to compare BLDC motor modeling [43]. The following mathematical equation can be used to represent the basic equation governing the armature voltage equation of a BLDC motor.
Where:
L: Self-inductance
R: Resistance
The following form can be used to rewrite equations (1) through (3):
Where:
P: Number of poles
If the phase winding resistances are equal, the iron loss is low; there is no mutual inductance between the phase windings, and the self-inductance is constant, it decreases.
The non-conducting phase's Back EMF is given by:
Where
: Back EMF constant = 0.06V/Rad/s
The following is the torque equation.
the output power is:
Newton's second law is applied to the rotating motion of the BLDC motor to complete the mathematical model as follows:
where the terms "Tl," "J," and "ωr" refer to the load torque, "M," and "," respectively, to denote the moment of inertia and coefficient of viscous friction. The electrical torque Te and its equation can be derived from an energy balance viewpoint, where the power supplied to the rotor (electromagnetic power) is equal to the product of the currents and the EMFs of the three phases, or the sum of the two, i.e.
Te − Tl = J d/ dt ωr + βωr
All electromagnetic energy is converted to kinetic energy if mechanical losses are ignored.
Pe = Te ωr
Te is explained by
As a result, Figure 4 shows the schematic design of a BLDC motor with three phases. This diagram shows the dependence on its BLDC motor's speed response.
2.3. Model dynamic mathematical
A. The closed-loop speed control system of the Drive controller BLDCM is constructed using the original dynamic mathematical model, and the diagram of the structure is illustrated in Figure 5. The regulator, using the pulse width modulator (PWM), the speed feedback network, the BLDCM, and the three-phase inverter make up the majority of the device.
A list of differential equations is established in accordance with the equivalent circuit of the BLDCM. Use the Laplace transformation to obtain the voltage and current transfer functions under the initial condition of zero initial states.
Moreover, current and electromotive have the following transfer function:
A dynamic structure of BLDCM is obtained by combining (19) and (20), and this structure is depicted in Figure 6.
Two inputs are present: a load current IdL and voltage for a light rectifier that is ideal for Udo. The former, however, is a disturbance input., the former is a control input. The electromagnetic time constant is called Tl. And Tm is the electric traction system's mechanical and electrical time constant. Ce is the coefficient of the counter-electric motive force (EMF) [44].
2.4. Design of speed control with Limitation
PI controllers are used for HEV speed control and BLDC motor current control to ensure EV traction. The PI speed and current controllers were tuned using classical methods based on trial and error. The intelligent tuning algorithms were used. These last two algorithms gave better results and a good compromise between speed and power control, which was the main problem of the trial and error method. An electric vehicle was simulated against a simple input speed criterion and an international driving cycle. Simulation results show that applying his FOC technique in conjunction with efficient regulation of speed and current loops yields satisfactory speed and torque results. A robustness analysis was performed, and the results show that the HEV is robust to variations in environmental parameter.
The block design shown in Figure 7 incorporates the acquisition to control the commutations, the BEMF has zero-crossing detection. Based on zero-crossing time intervals, the motor speed is hypothesized. The speed PI controller receives input from the discrepancy between the requested and estimated speeds. The voltage to be provided to the Brushless Direct Current motor is directly proportional to the result of the speed PI controller [45].
To provide feedback to the current controller, The BEMF zero-crossing event includes measurement and filtering of the motor current. The existing output of the PI controller constrains the output of the speed PI controller. The maximum permitted motor current is protected from being exceeded by the speed PI controller's output limiting.
2.5. Proposed system
Inverter modeling with a 120° conduction mode is implemented in MATLAB-Simulink (see Figure 8). For each of the six transportation sectors, the inverter model is derived. since the inverter control employs information from Hall effect sensors. The MATLAB blocks are used to determine the latter.
Hall Sensors detect coil placement, and decoder circuit, and coil position activates and deactivates the relevant switches, and the motor is rotated by the voltage passing through the appropriate coils in the BLDCM works. BLDC typically employs 3 phases with 120 degrees between each phase's conducting interval . An electronic speed controller controls a brushless motor's movement or speed by turning on the necessary MOSFETs, which cause the motor to rotate. The frequency or speed at which the ESC cycles over the six periods will determine how fast the motor will move.
This trend is affected by the massive advantages offered by electric vehicles (EV), such as pollution-free, economical and low-maintenance cost operation. The heart of this system is the electric motor powered by lithium-ion batteries [51].
In the Future will concentrate on the implementation of EVs’ charging management systems in addition to the present methodology and the adoption of additional technologies for net-metering support and V2G technology, aiming to a further reduction of the energy cost for each individual actor and present additional benefits to DSOs. Finally, more detailed battery models will be considered which will take into consideration the degradation of EVs’ and RES’ batteries. The necessity for intricate driving electronics is a drawback, More sensors are necessary, Prices are higher and Some systems demand manual labor. Stator Coils with a hand wound.
3. Results and discussion
3.1. Simulation results
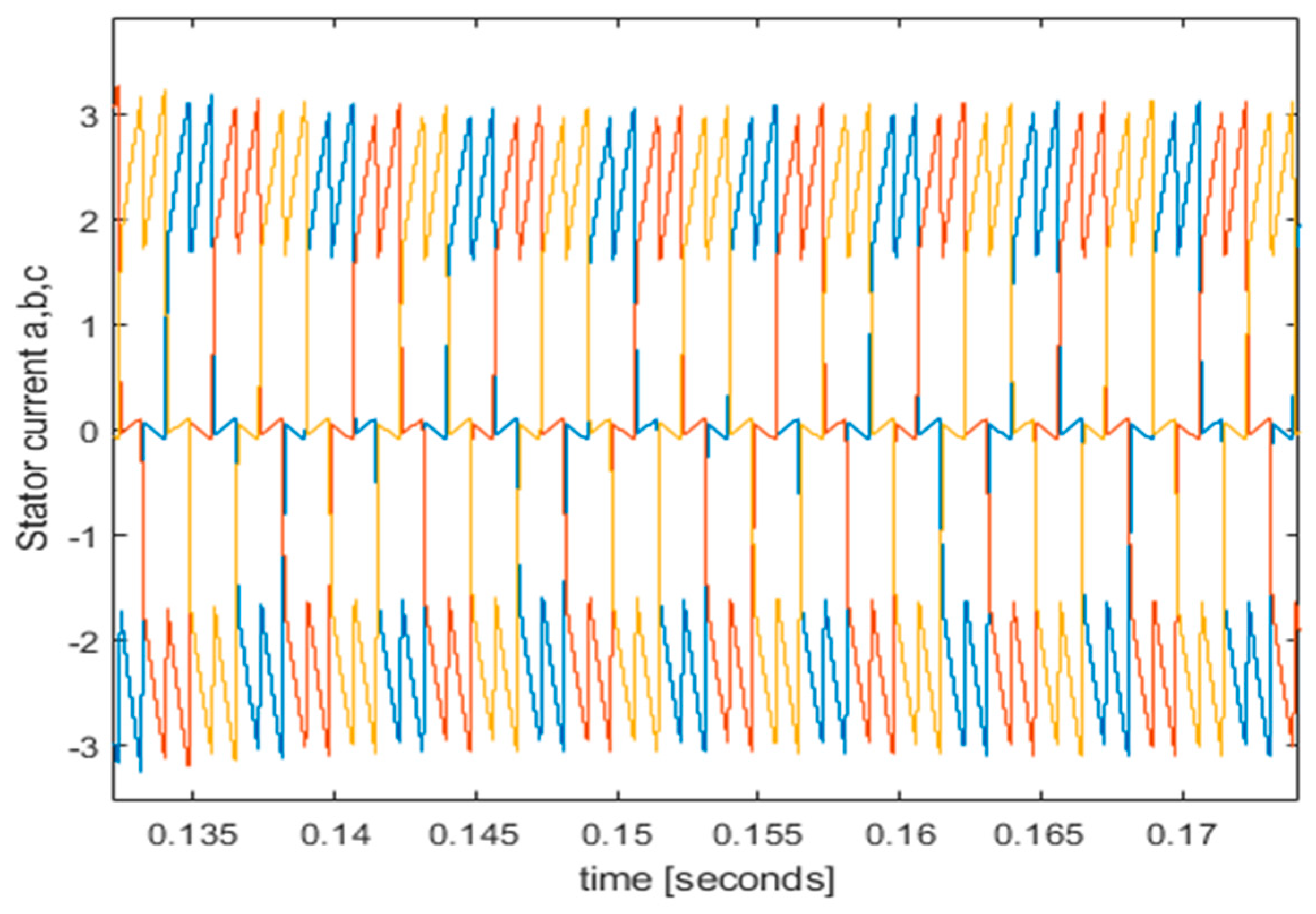
Figure 9.
Simulated Stator Current a,b,c.
The speed control was tested by running a few step responses; First, from a standstill to 3100 RPM, then down to 2800 RPM before going back to a standstill at 3000 RPM. Shown in Figure 10.
Figure 10.
Simulated Speed.
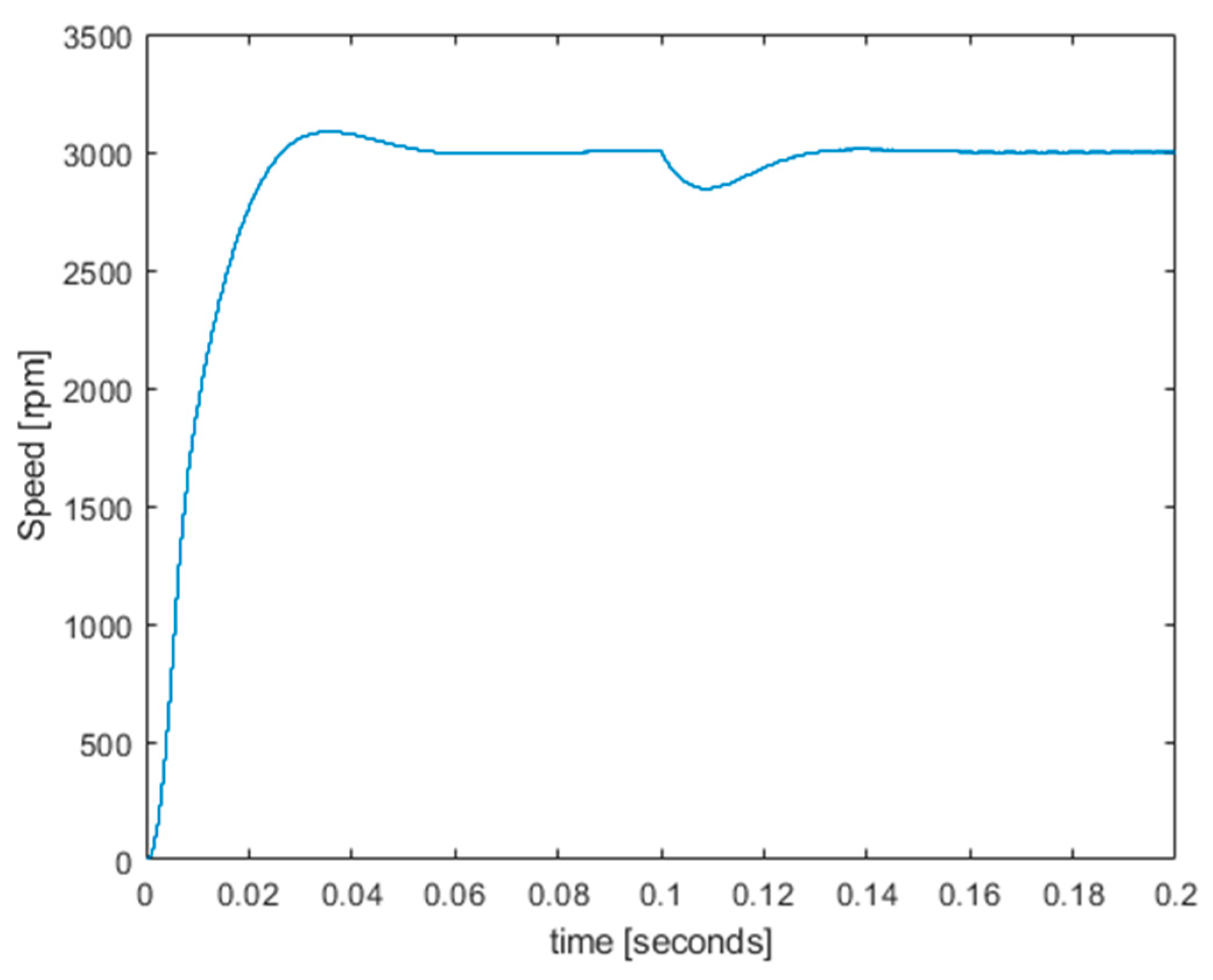
Figure 11.
Simulated Torque.
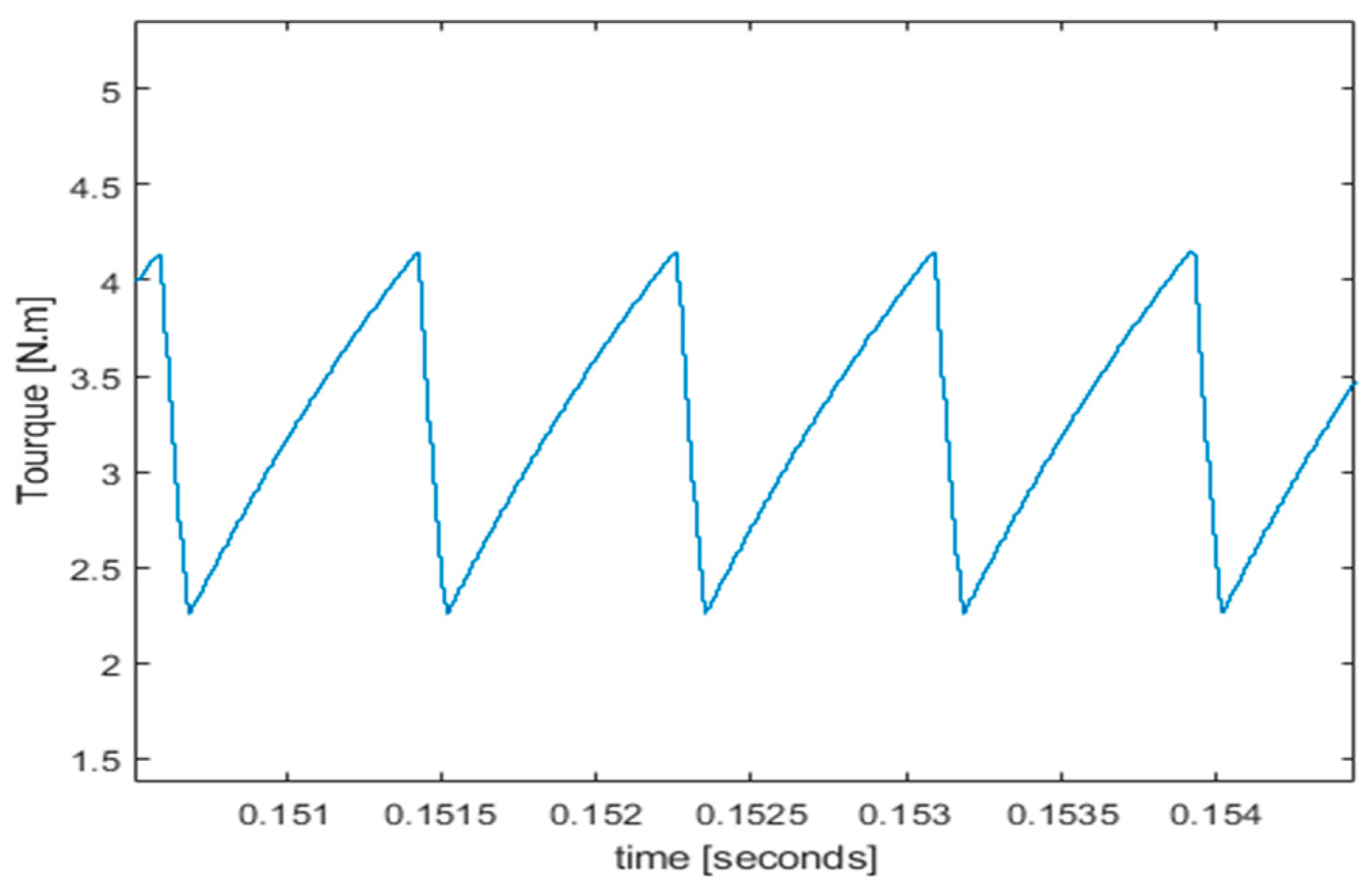
Figure 12.
Simulated Phase Voltage.
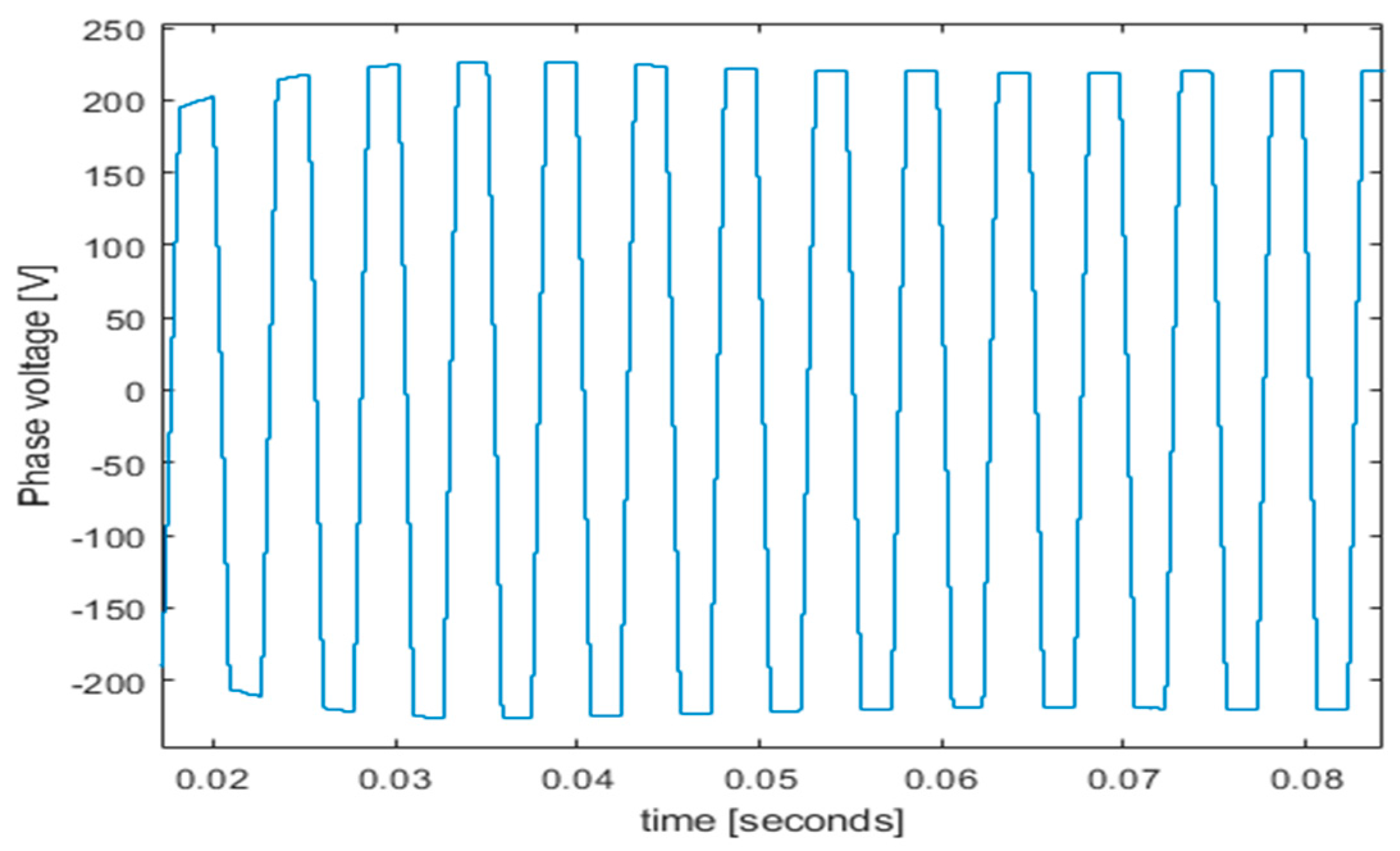
Figure 13.
Simulated Phase Voltage a,b,c.
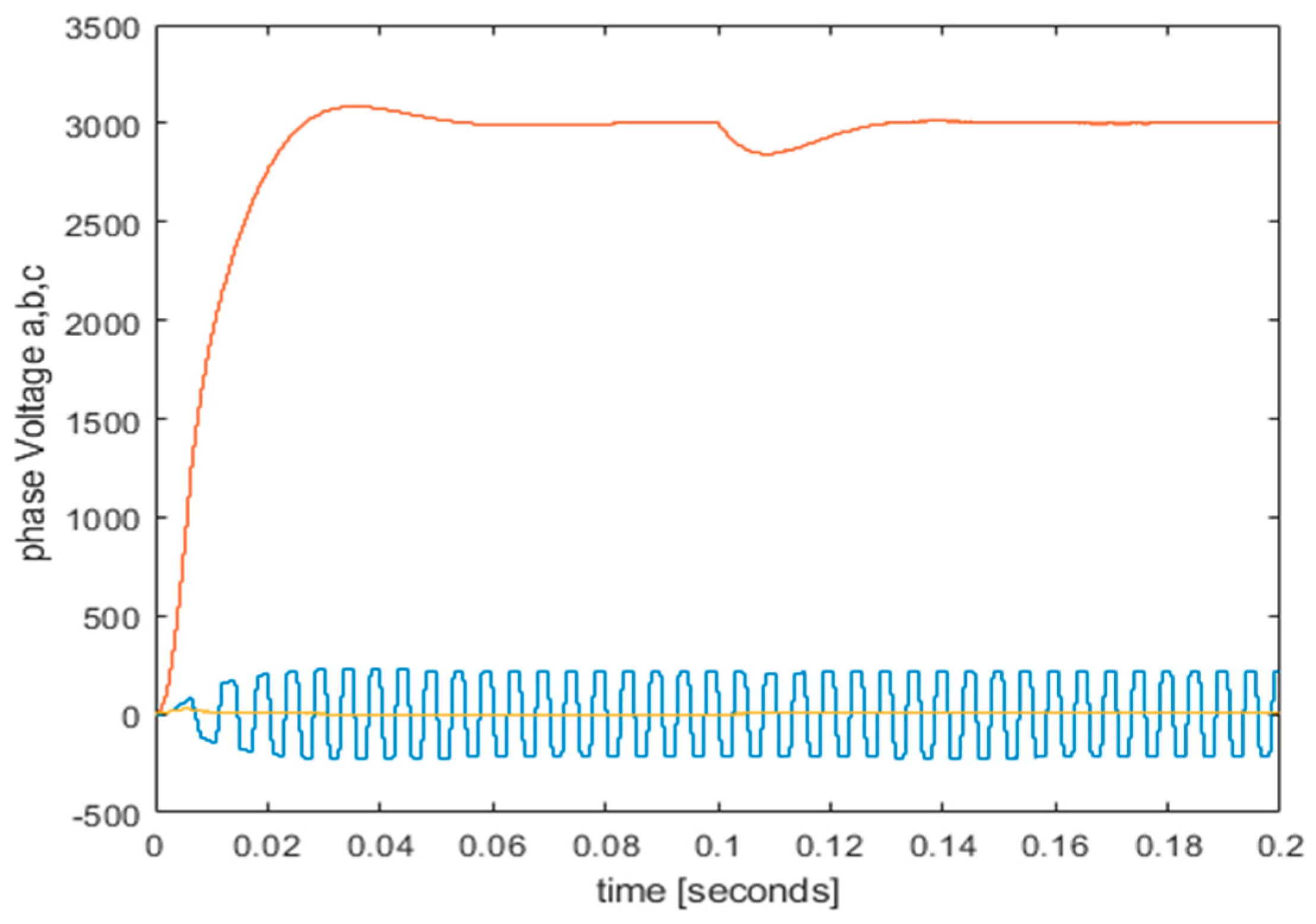
Figure 14.
Simulated Phase Current.
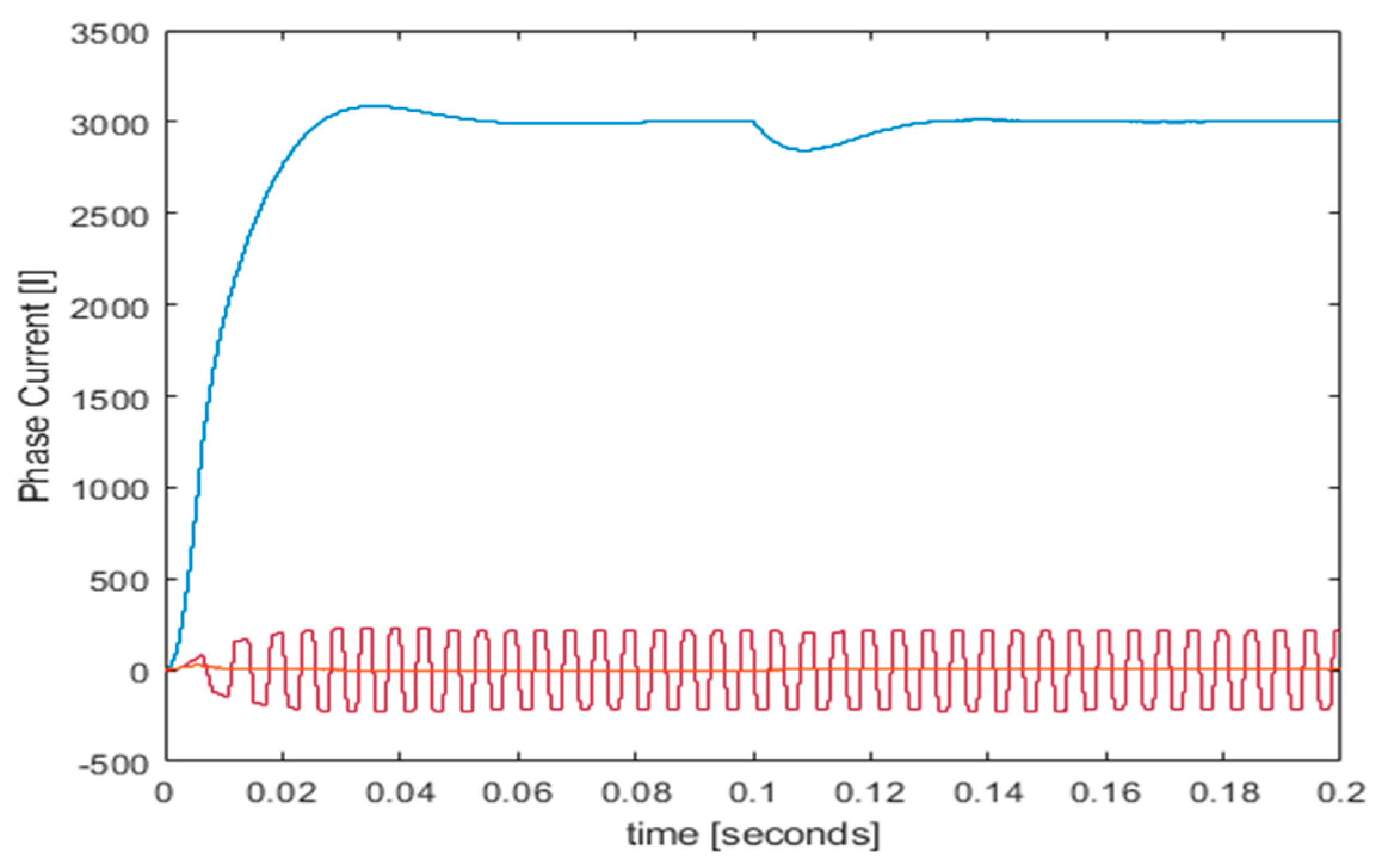
Figure 15.
Simulated Rotor Current a,b,c.
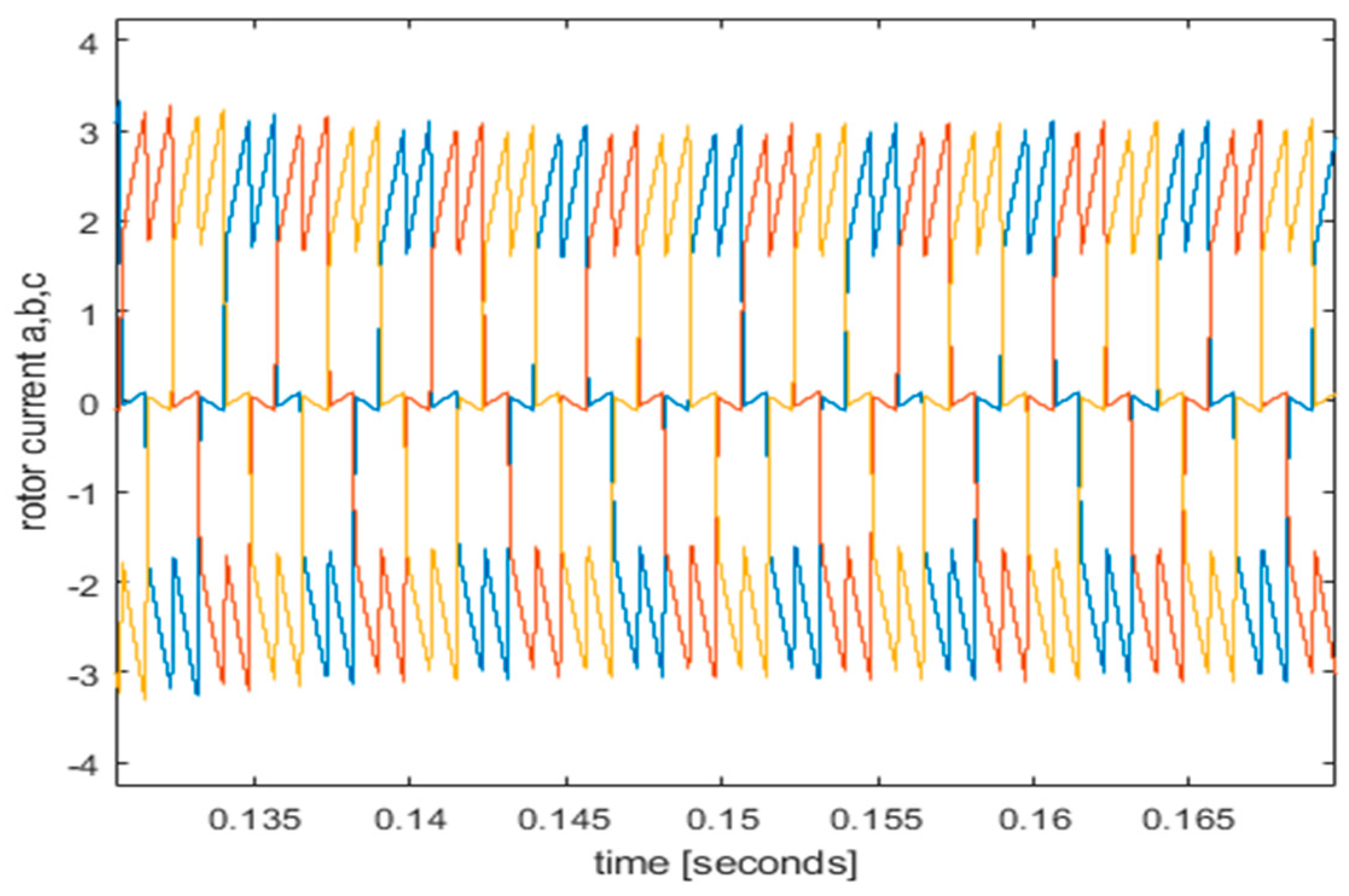
Figure 16.
Simulated Rotor Angle a,b,c.
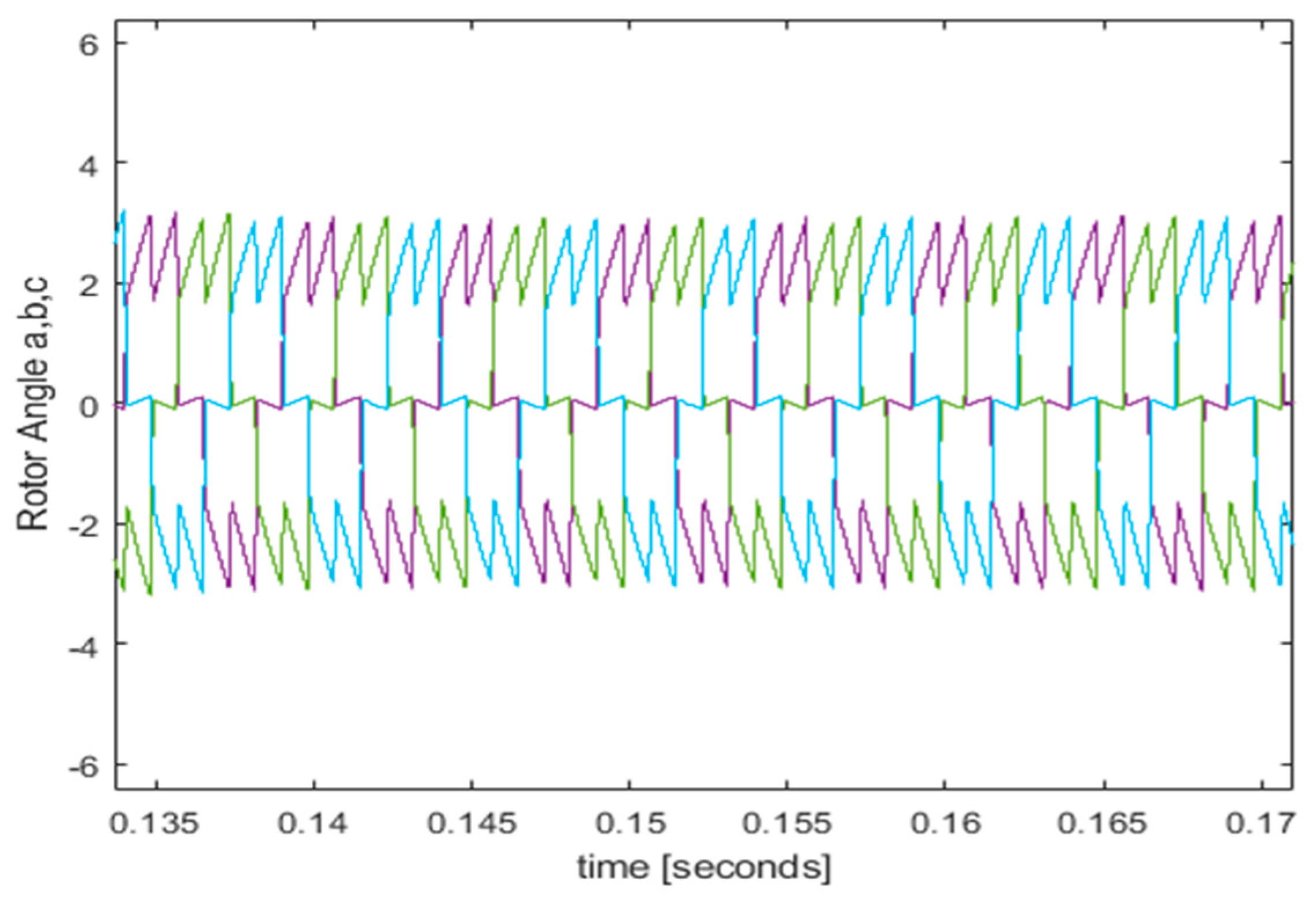
Figure 17.
Simulated Back EMF Voltage.
3.2. Experimental Setup
A stator and a rotor are the two primary components of a BLDC motor. In this example, the stator is made up of coils that are arranged, as shown in Figure 18.
When current flows in the coil, it will produce a magnetic field. The direction of the current controls the magnetic field lines or poles. The coil will produce the magnetic field that will pull the permanent magnet of the rotor due to the direction of the controlled current in the right direction. The rotor will continue to rotate due to the interaction of forces between the electromagnet and the permanent magnet by turning each coil individually.
Arduino BLDC Motor Program. A PWM signal with a duty cycle ranging from 0% to 100% and a frequency of 50Hz is required. A potentiometer should be used to regulate the duty cycle to regulate the motor's speed. Since controlling the motors similarly requires a PWM signal with a frequency of 50 Hz, the code is similar to that used to control the motors, so the same library of motors from the Arduino platform is used. The schematic created using Circuit Lab is shown in Figure 19.
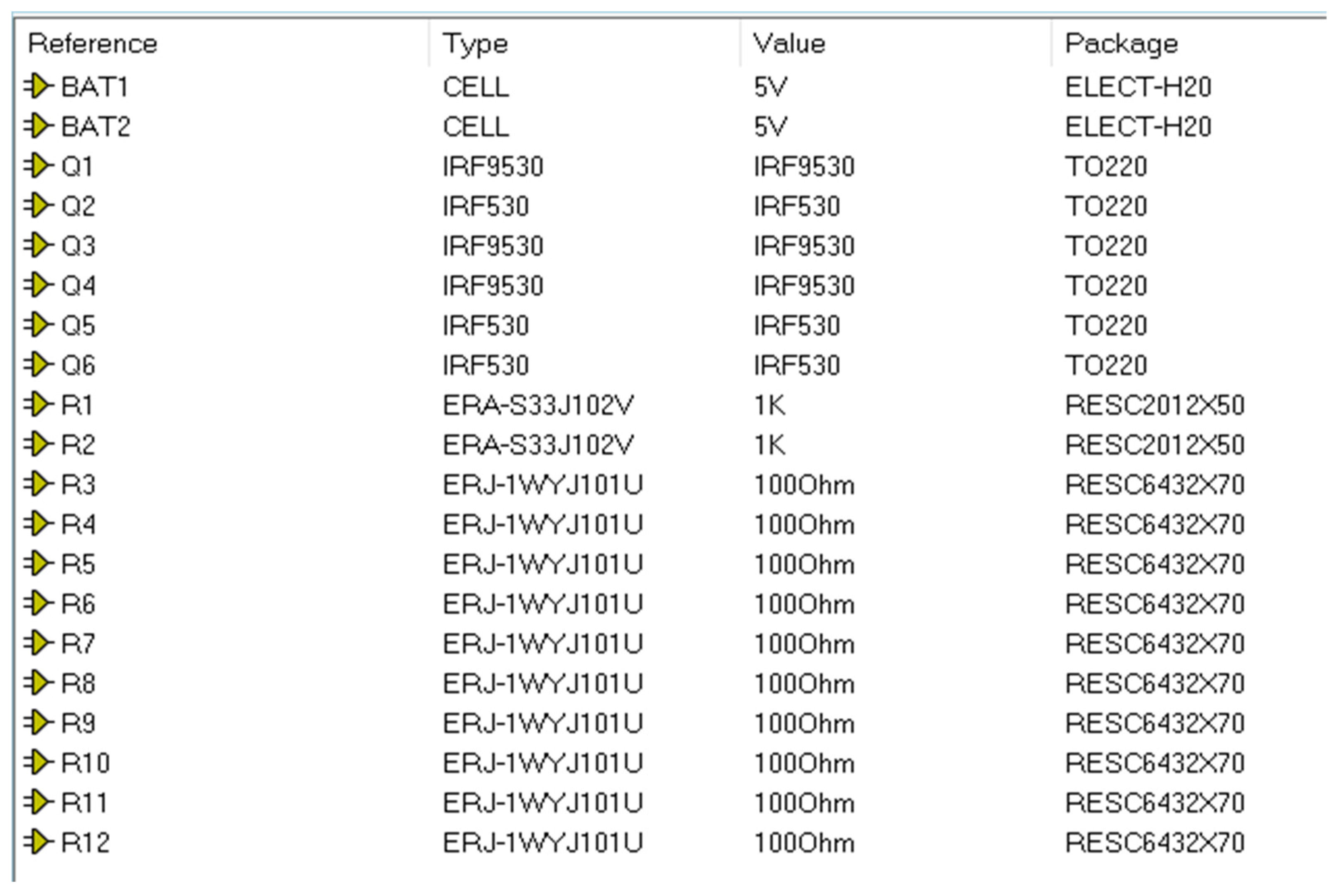
Firstly, test commutation is required. A three-phase linear motor needs to transition between the phases in order to activate the proper windings in order to produce motion. Commutation refers to the transition between the three stages. One can turn one pole on at a time and have the motor turn to that position (or just measure the voltage at the motor). An oscilloscope would be handy to make sure your waveform is working right. The parameters of circuit components are listed in Table 2.
The experiment was constructed several times and each time I faced some difficulties until the required circuit was welded successfully. shown in Figure 20. (a), (b).
Then, the final shape of the board of the BLDC motor circle has been reached shown in Figure 21.
The BLDC motor was connected to the designed circuit, and a test was made of it by connecting the voltage, and the start of the experiment was at 12V, but the motor did not start yet. So, the circuit was tested again in the lab by coding Arduino with it plugged into the laptop and uploading the code to the Arduino (UNO) chip. The BLDC motor is wound at a very high-speed ranging from 2200rpm to 2500rpm as shown in Figure 22.
A Brushless DC motor was installed in a certain way, either by using a fixing device or by using a wooden board on which the motor was fixed so that the motor's speed could be determined. According to Figure 23.
Figure 24 displays the experimental phase voltages for phases a and b. The results of the experiment match those of the simulation. Using Ardino UNO, the experimental phase voltages for phases a and c are displayed in Figure 25.
The experimental Mode 1 (variable speed) voltage of phase A is shown in Figure 26, where the experimental results agree to some extent with the simulated results. The experimental voltage waveform of phases A, B and C At the maximum speed of the motor is shown in Figure 27. where there is a shift of approximately 120° shown in Figure 28, When reducing speed gradually where shown in Figure 29. and as Figure 30 shows the experimental voltage waveform of phases A, B and C with very dropping speed. THE experimental results agree to some extent with the simulated result
4. Conclusions
This research explained EV technology in general and demonstrated how to control the BLDC motor's speed for EV use. The requirement to move towards greater efficiency Applications for BLDC motors are widely used today. Since the reference value was attained, the actual value results from the simulation represented the various output waveforms. The output waveforms are BLDC motors with zero torque and variable speeds. The BLDC motor's torque and RPM speed can be controlled considerably more easily and at far greater speeds because it is commutated electronically. Benefits of the suggested BLDC motor for electrical vehicle applications include high efficiency, clean, and safe transportation.
Author Contributions
Conceptualization, K.S. and A.A.; methodology, H.H.; software, M.A.; validation, K.S., H.H. and A.A.; formal analysis, K.S.; investigation, H.H.; resources, H.H.; data curation, A.A.; writing—original draft preparation, A.A.; writing—review and editing, X.X.; visualization, H.H.; supervision, A.A.; project administration, A.A.; funding acquisition, M.A. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by Science, Technology and Innovation Funding Authority (STDF), project number “45039”.
Conflicts of Interest
The authors declare no conflict of interest.
Abbreviations
| AC | Alternating Current |
| DC | Direct Current |
| BLDCM | Brushless Direct Current Motor |
| PMBLDC | Permanent Magnet Brushless Direct Current |
| MOSFET | Metal Oxide Semiconductor Field Effect Transistor |
| EV | Electric Vehicle |
| BDC | Brushed Direct Current |
| IM | Induction Motor |
| SRM | Switching Reluctance Motor |
| RES | Renewable energy systems |
| PWM | Pulse Width Modulation |
| ICE | Internal Combustion Engine |
| EMI | Electro Magnetic Interference |
| VS | Voltage Source |
| CS | Current Source |
| kHz | kilo hertz |
| P | number of pulses |
| EMC | Electro Magnetic Compatibility |
| EMF | Electro Magnetic Field |
| MHz | Mega Hertz |
| PID | Proportional Integral and Derivative |
| MCU | Microcontroller Unit |
| IC | Integrated Circuit |
References
- Chow, C.C.T.; Ainslie, M.D.; Chau, K.T. High temperature superconducting rotating electrical machines: An overview. Energy Reports 2023, 9, 1124–1156. [CrossRef]
- Yang, D.; Huo, Y.; Zhang, Q.; Xie, J.; Yang, Z. Recent advances on air heating system of cabin for pure electric vehicles: A review. Heliyon 2022, 8, 1–11. [CrossRef]
- Rajesh, P.; Shajin, F.H.; Rajani, B.; Sharma, D. An optimal hybrid control scheme to achieve power quality enhancement in microgrid connected system. Int. J. Number Model Electron Netw Dev Fields 2022, 35, e3019.
- Jayakumar, V.; Chokkalingam, B.; Munda, J.L. A Comprehensive Review on Space Vector Modulation Techniques for Neutral Point Clamped Multi-Level Inverters. IEEE Access 2021, 9, 112104–112144. [CrossRef]
- Aliasand, A.E.; Josh, F. Selection of motor for an electric vehicle: A review. Materials Today: Proceedings 2020, 24, 1804–1815. [CrossRef]
- Sheng, Y.; Wang, X.; Wang, L.; Hou, P. Fuzzy-PID control system design of brushless DC motor based on vector control. Chinese automation congress (CAC), Jinan, China, 5583-5587.
- Chen, Q.; Liu, G.; Zhao, W.; Qu, L.; G. Xu. Asymmetrical SVPWM fault-tolerant control of five-phase PM brushless motors. IEEE Transactions on Energy Conversion 2016, 3, 12–22. [CrossRef]
- Sriram, J.; Sureshkumar, K. Speed control of BLDC motor using fuzzy logic controller based on sensorless technique. International Conference on Green Computing Communication and Electrical Engineering (ICGCCEE), Coimbatore, India, 2014, 1-6.
- Goswami, R.; Joshi, D. Performance review of fuzzy logic based controllers employed in brushless DC motor. Procedia computer science, 2018, 132, 623–631. [CrossRef]
- Yong, Z.; Man, W.; Qi, L.; Chao, Z. The design of BLDCM controller for EMA based on fuzzy PID control. Chinese Control and Decision Conference (CCDC), Yinchuan, China, 2016, 6428-6432.
- Devi, K.S.; Dhanasekaran, R.; Muthulakshmi, S. Improvement of speed control performance in BLDC motor using fuzzy PID controller. International Conference on Advanced Communication Control and Computing Technologies (ICACCCT), Ramanathapuram, India, 2016, 380-384.
- Whittingham, M.S. History, evolution, and future status of energy storage. Proceedings of the IEEE, 2012, 100, 1518–1534. [CrossRef]
- Singh, B. Recent advances in permanent magnet brushless DC motors. Sadhana 1997, 22, 837–853. [CrossRef]
- Miller, T.J. Brushless permanent-magnet and reluctance motor drives. Oxford University Press, 1989.
- Blinov, D.; Borzenko, V.; Bezdudny, A. Experimental research of metal hydride heat storage reactor processes. in Journal of Physics: Conference Series 2021, 2039, 012004. [CrossRef]
- Bertoluzzo, M.; Buja, G.; Cossalter, V.; Doria, A.; Mazzaro, D. Getting around in electric vehicles. IEEE Industrial Electronics Magazine 2008, 2, 10–18.
- Pal, S. Comparative study of the design and development of direct drive brushed and brushless DC motors with samarium cobalt, neodymium-iron-boron and ceramic magnets. in conf. IEE Colloquium on Permanent Magnet Machines and Drives, London, UK, 1993, 1-7.
- Oman, H.; Simpson-Clark, R. Permanent magnets for vehicle-propulsion motors: cost/availability. in IECEC 96. Proceedings of the 31st Intersociety Energy Conversion Engineering Conference, Washington, DC, USA, 1996, 91-96.
- Kenjō, T.; Nagamori, S. Permanent-magnet and brushless DC motors. Clarendon Press. Oxford, 1985, 18.
- Skvarenina, T.L. The power electronics handbook. CRC Press, 2018.
- Rajashekara, K. History of electric vehicles in General Motors. IEEE Transactions on Industry Applications 1994, 30, 897–904.
- Chan, C.; Chau, K. Modern electric vehicle technology. Oxford University Press, 2001, 47.
- Chan, C. An overview of electric vehicle technology. Proceedings of the IEEE 1993, 81, 1202–1213. [CrossRef]
- Chan, C. Present status and future trends of electric vehicles. 2nd International Conference on Advances in Power System Control, Operation, and Management, APSCOM-93., Hong Kong, 1993, 456-469.
- Appelbaum, J.; Sarma, M. The operation of permanent magnet DC motors powered by a common source of solar cells. IEEE Transactions on Energy Conversion 1989, 4, 635–642. [CrossRef]
- Dawson, C.; Bolton, H. Performance prediction of a wide-angle limited-motion rotary actuator. in Proceedings of the Institution of Electrical Engineers 1978, 125, 895 – 898. [CrossRef]
- Dawson, C.; Bolton, H. Design of a class of wide-angle limited-rotation rotary actuators. in Proceedings of the Institution of Electrical Engineers 1979, 126, 345–350. [CrossRef]
- Tokunaga, D.; Kesamaru, K. Development of novel PM motors for sport type electric motorcycles. 15th International Conference on Electrical Machines and Systems (ICEMS), Sapporo, Japan, 2012, 1-4.
- Akhil, M.; Aishwarya, V.; Sheela, K.G. An Improved SEPIC- Based Single Switch Buck-Boost PFC Converter Fed Brushless DC Motor Drive. Materials Today: Proceedings 2020, 24, 1855–1864. [CrossRef]
- Krishnan, R. Electric Motor Drives Modeling, Analysis, and Control. Prentice Hall, 2001.
- Murai, Y.; Kawase, Y.; Ohashi, K. Torque ripple improvement for brushless DC miniature motors. IEEE Transactions on Industry Applications 1989, 25, 441–450. [CrossRef]
- Park, S.I.; Kim, T.S.; Ahn, S.C.; Hyun, D.S. An improved current control method for torque improvement of high-speed BLDC motor. IEEE 18th Applied Power Electronic Conference and Exposition, Miami Beach, FL, USA, 2003, 294-299.
- Rodriguez, F.; Emadi, A. A novel digital control technique for brushless DC motor drives. IEEE Transactions on Industrial Electronics 2007, 54, 365–2373.
- Pindoriya, R.M.; Rajendran, S.; Chauhan, P.J. Field programmable gate array-based speed control of BLDC motor. IEEE Innovative Smart Grid Technologies - Asia (ISGT ASIA), Bangkok, Thailand, 2015, 1-6.
- Tashakori, A.; Hassanudeen, M.; Ektesabi, M. FPGA based controller drive of BLDC motor using digital PWM technique. IEEE 11th International Conference on Power Electronics and Drive Systems, Sydney, NSW, Australia, 2015, 658-662.
- Li, Z.B.; Lu, W.; Gao, L.F.; Zhang, J.S. Nonlinear state feedback control of chaos system of brushless DC motor. Procedia computer science 2021, 183, 636–640. [CrossRef]
- Wang, X.; Tallam, R.; Shrivastava, A.; Morris, G. Reliability test setup for liquid aluminum electrolytic capacitor testing. Annual Reliability and Maintainability Symposium (RAMS), Orlando, FL, USA, 2019, 1-5.
- Jo, S.T.; Shin, H.S.; Lee, Y.G.; Lee, J.H.; Choi, J.Y. Optimal design of a BLDC motor considering three-dimensional structures using the response surface methodology. Energies 2022, 15, 461. [CrossRef]
- Lee, T.Y.; Seo, M.K.; Kim, Y.J.; Jung, S.Y. Motor design and characteristics comparison of outer-rotor-type BLDC motor and BLAC motor based on numerical analysis. IEEE Trans. Appl. Supercond. 2016, 26, 1–6. [CrossRef]
- Behera, R.K.; Kumar, R.; Bellala, S.M.; Raviteja, P. Analysis of electric vehicle stability effectiveness on wheel force with BLDC motor drive. in Proc. IEEE Int. Conf. Ind. Electron. Sustain. Energy Syst. (IESES), Hamilton, New Zealand, 2018, 195–200.
- Yedamale, P. Brushless DC (BLDC) motor fundamentals. Microchip Technology Inc 2003, 20, 3–15.
- Aresta, M.; Dibenedetto, A.; Quaranta, E. State of the art and perspectives in catalytic processes for CO2 conversion into chemicals and fuels: The distinctive contribution of chemical catalysis and biotechnology. Journal of Catalysis 2016, 343, 2–45. [CrossRef]
- Pillay, P.; Krishnan, R. Modeling of permanent magnet motor drives. IEEE Transactions on industrial electronics 1988, 35, 537–541.
- Attar, A.; Bouchnaif, J.; Grari, K. Control of Brushless DC motors using sensorless Back-EMF integration method. Materials Today: Proceedings 2021, 45, 7438–7443. [CrossRef]
- Bayardo, R.G.; Loukianov, A.G.; Fuentes-Aguilar, R.Q.; Utkin, V.I. Adaptive speed tracking controller for a brush-less DC motor using singular perturbation. IFAC Papers Online 2020, 53, 3880–3885. [CrossRef]
- Yumashev, A.; Mikhaylov, A. Development of polymer film coatings with high adhesion to steel alloys and high wear resistance. Polymer Composites 2020, 41, 2875–2880. [CrossRef]
- Bhuiyan, M.A.; Zh., Q.; Khare, V.; Mikhaylov, A.; Pinter, G.; Huang, X. Renewable Energy Consumption and Economic Growth Nexus—A Systematic Literature Review. Frontiers in Environmental Science 2022, 10, 878394. [CrossRef]
- Dinçer, H.; Yüksel, S.; Mikhaylov, A.; Pinter, G.; Shaikh, Z.A. Analysis of renewable-friendly smart grid technologies for the distributed energy investment projects using a hybrid picture fuzzy rough decision-making approach. Energy Reports 2022, 8, 11466–11477. [CrossRef]
- Wang, Q.; Guo, J.; Li, R.; Mikhaylov, A.; Moiseev, N. Does technical assistance alleviate energy poverty in sub-Saharan African countries? A new perspective on spatial spillover effects of technical assistance. Energy Strategy Reviews 2023, 45, 101047. [CrossRef]
- He, H.; Huang, Y.; Nakadomari, A.; Masrur, H.; Krishnan, N.; Hemeida, A.M.; Mikhaylov, A.; Senjyu, T. Potential and economic viability of green hydrogen production from seawater electrolysis using renewable energy in remote Japanese islands. Renewable Energy 2023, 202, 1436–1447. [CrossRef]
- Rimpas, D.; Kaminaris, S.D.; Piromalis, D.D.; Vokas, G.; Arvanitis, K.G.; Karavas, C.S. Comparative Review of Motor Technologies for Electric Vehicles Powered by a Hybrid Energy Storage System Based on Multi-Criteria Analysis. Energies 2023, 16, 2555. [CrossRef]
Figure 1.
EV motor classification.
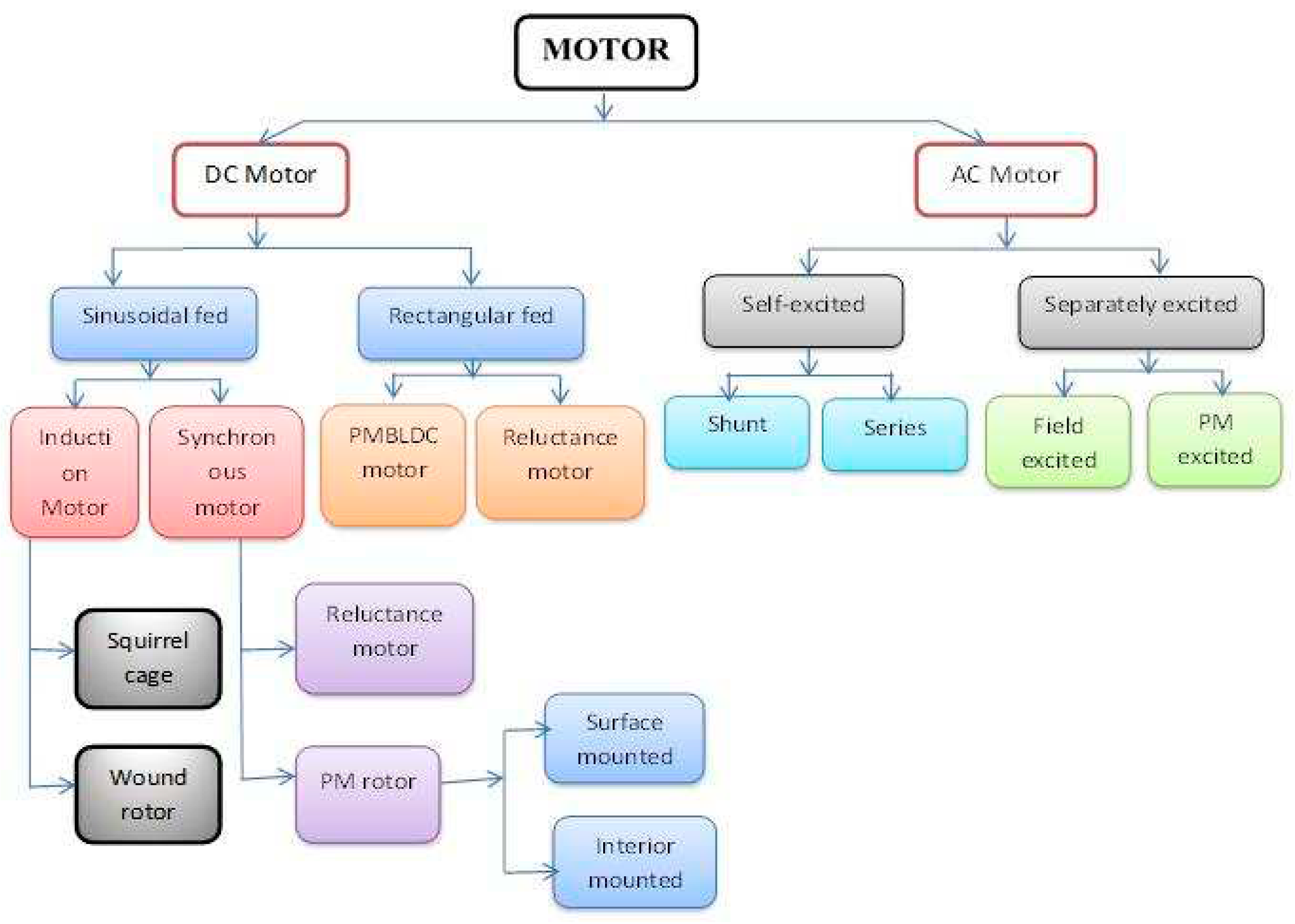
Figure 2.
BLDC motor and control algorithm types.
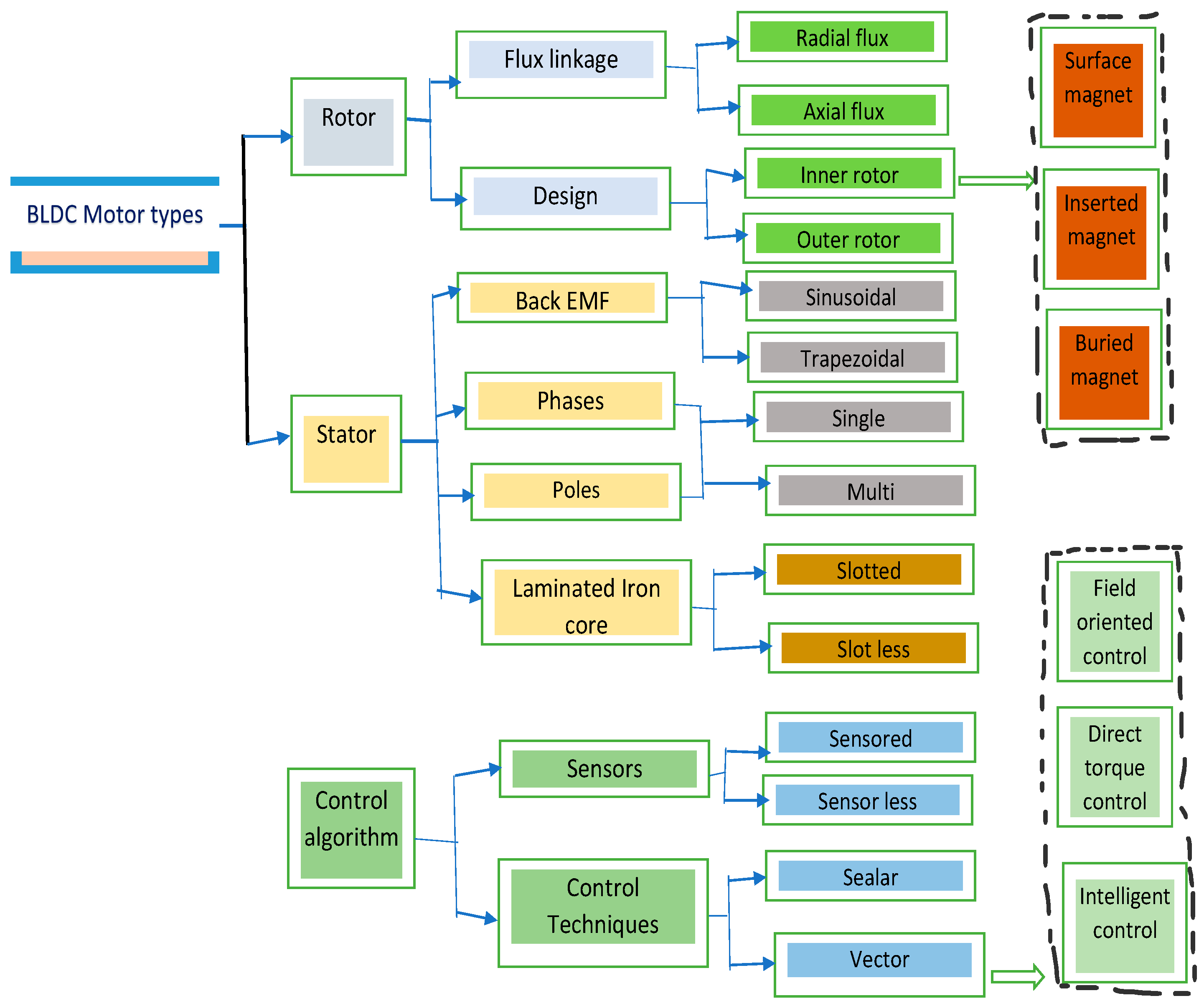
Figure 3.
Circuit equivalent for a three-phase, Y-connected a BLDC motor.
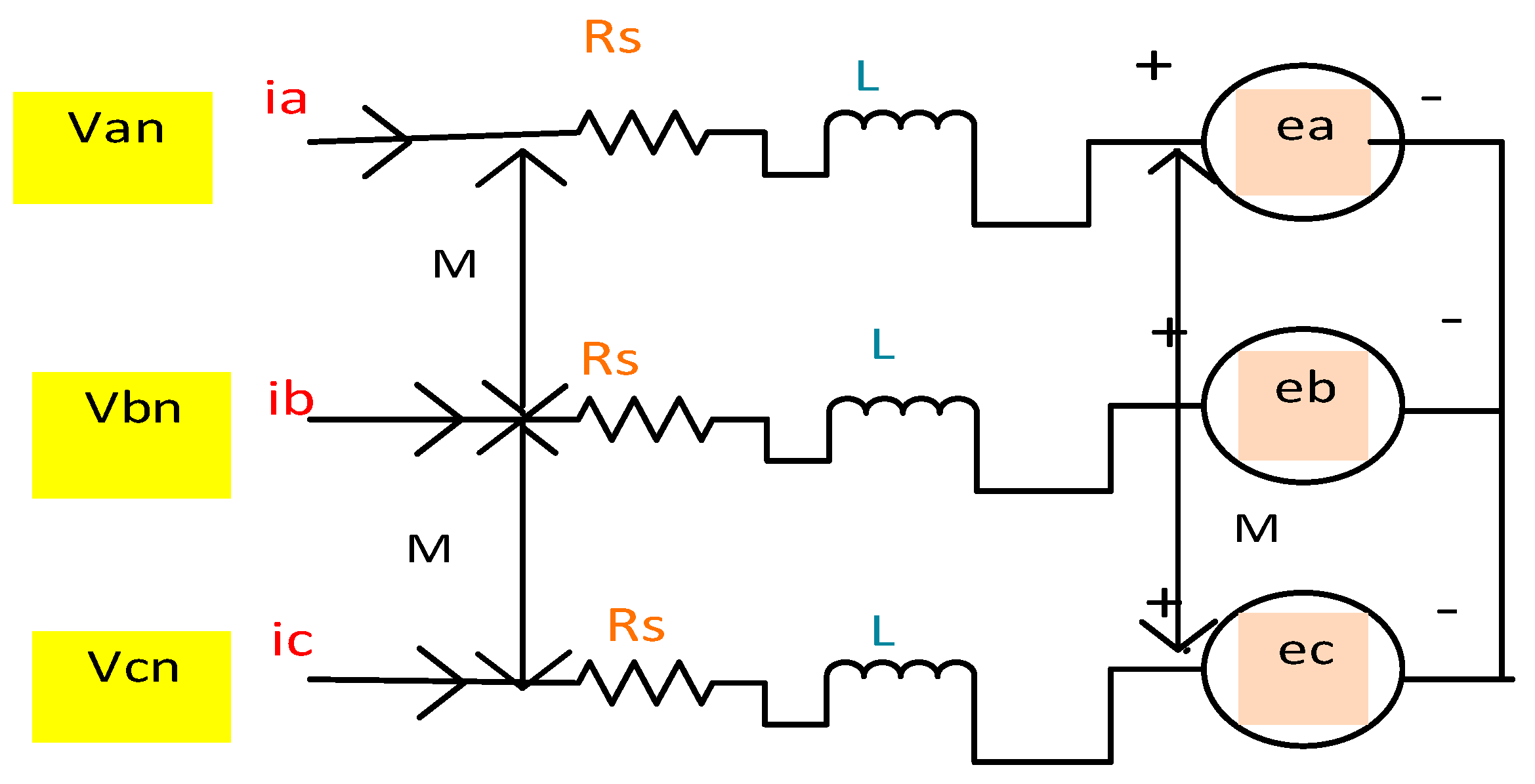
Figure 4.
Three-phase BLDC motor schematic diagram.
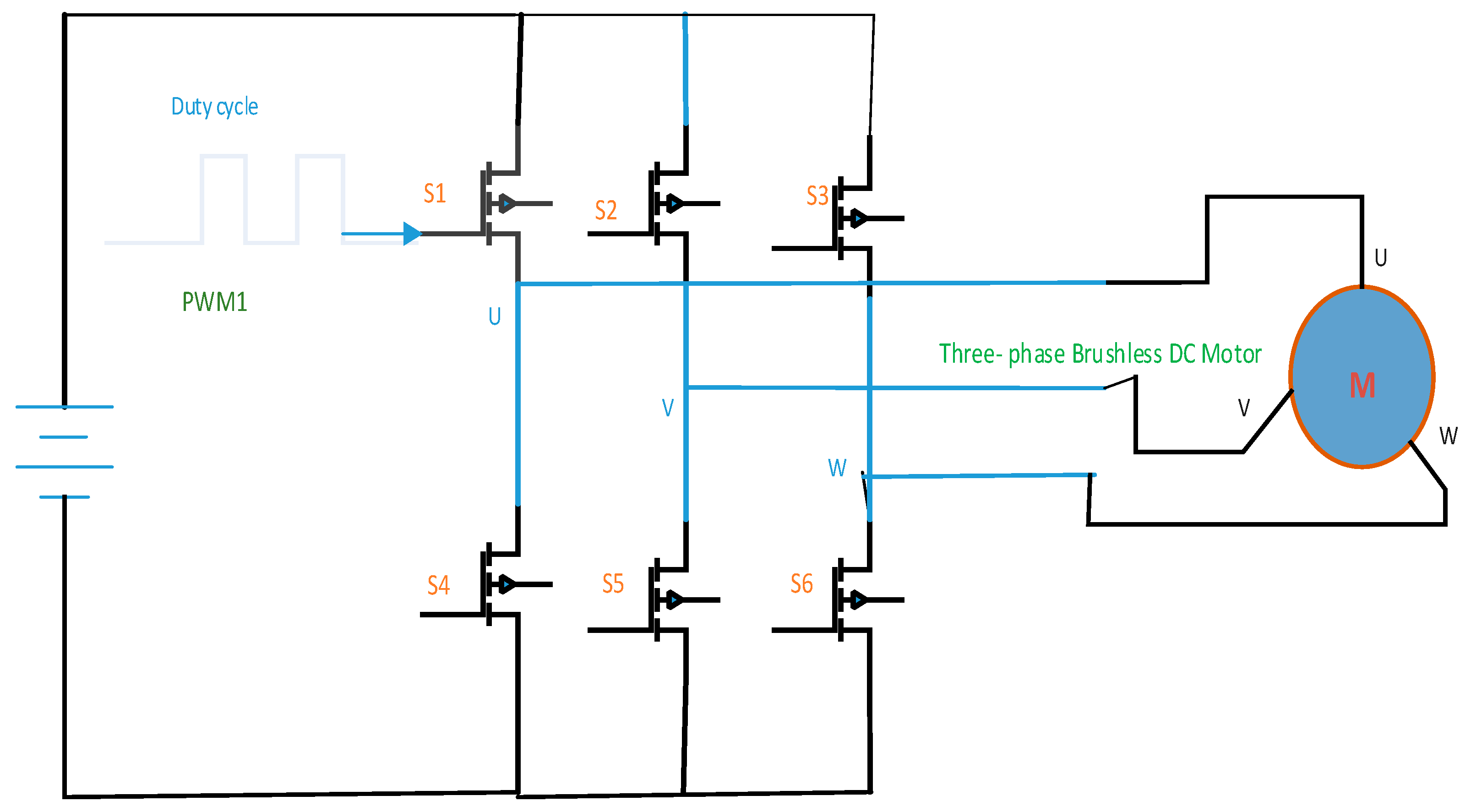
Figure 5.
Closed-loop structure of the speed control system.
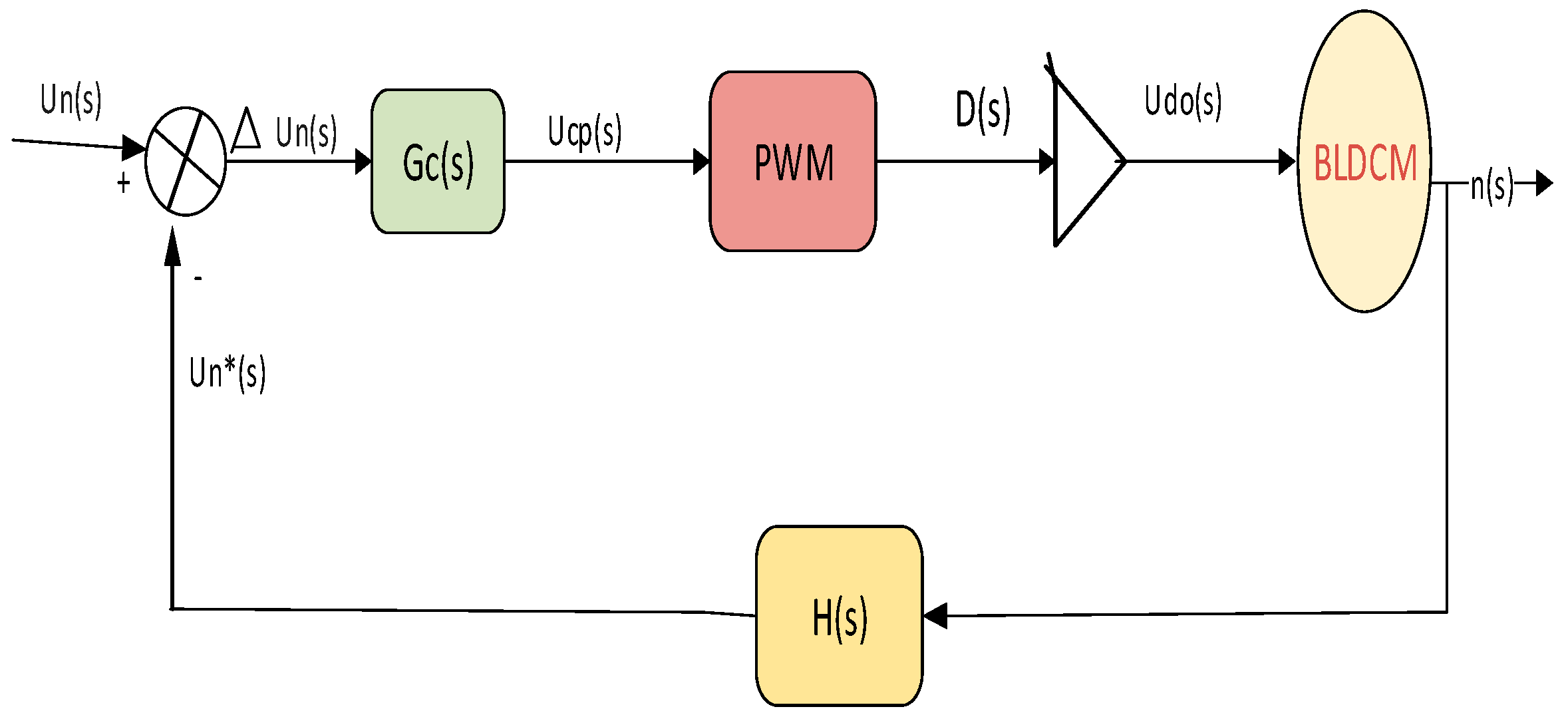
Figure 6.
BLDCM's Dynamic Structure.
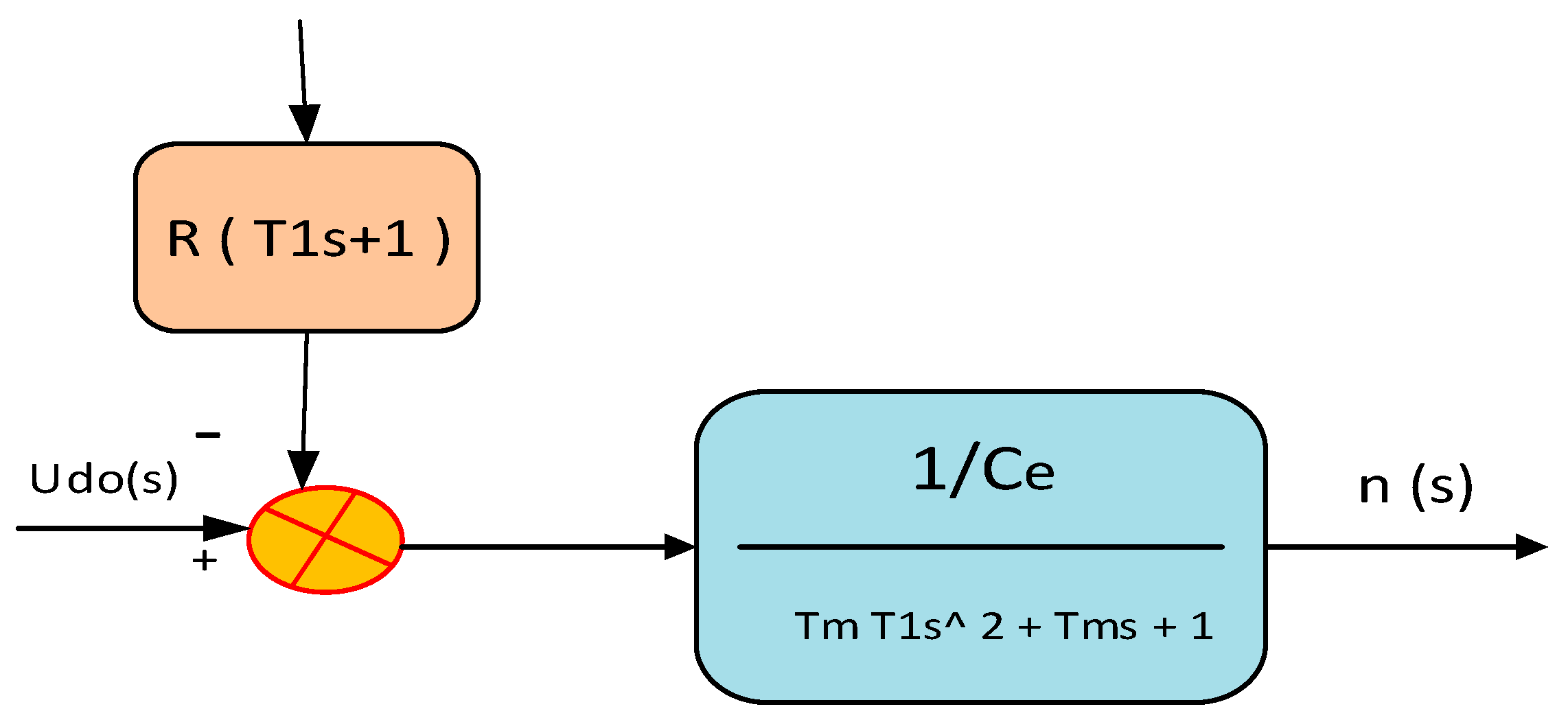
Figure 7.
Speed Control with Current Limitation.
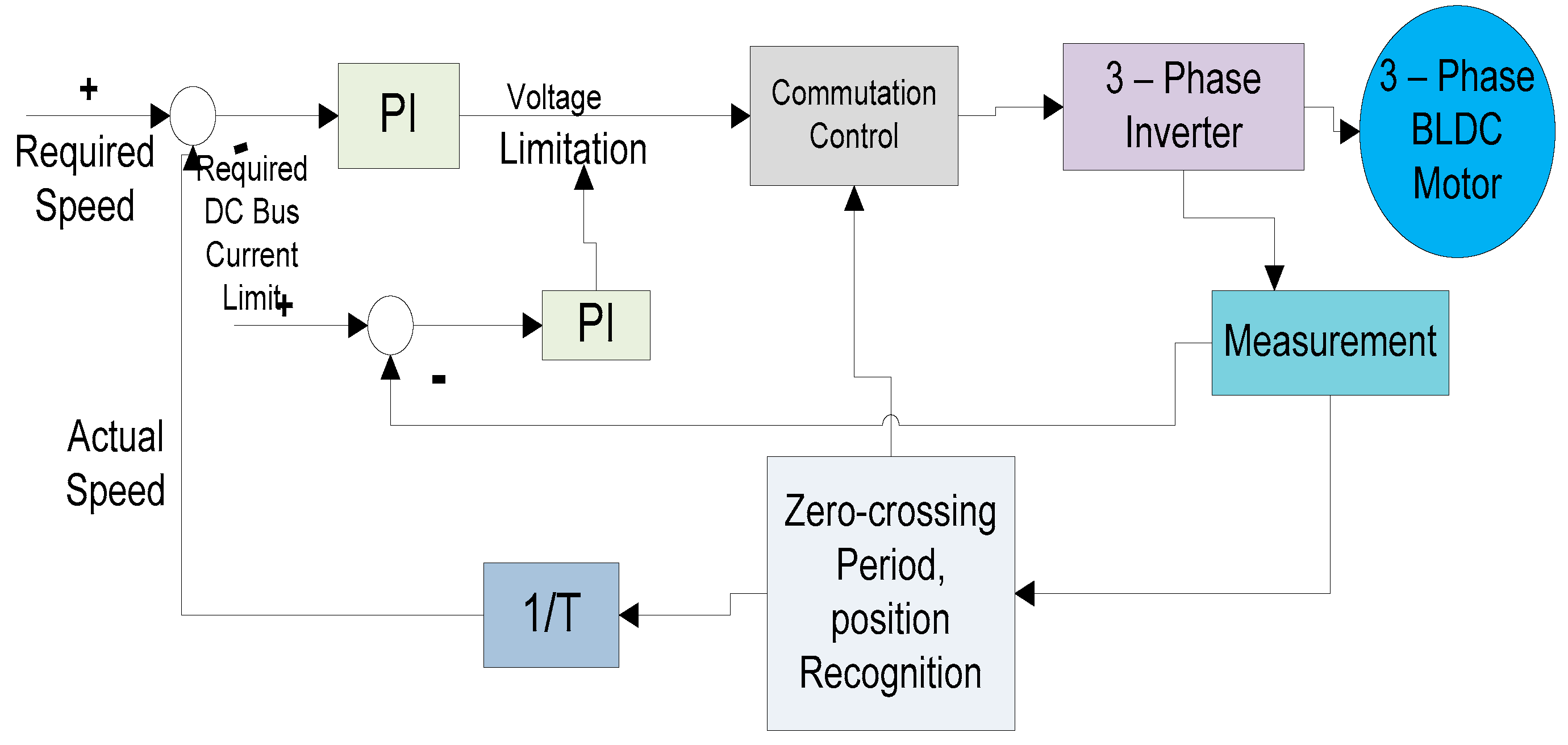
Figure 8.
The proposed system of BLDC motor constructed on MATLAB/Simulink.
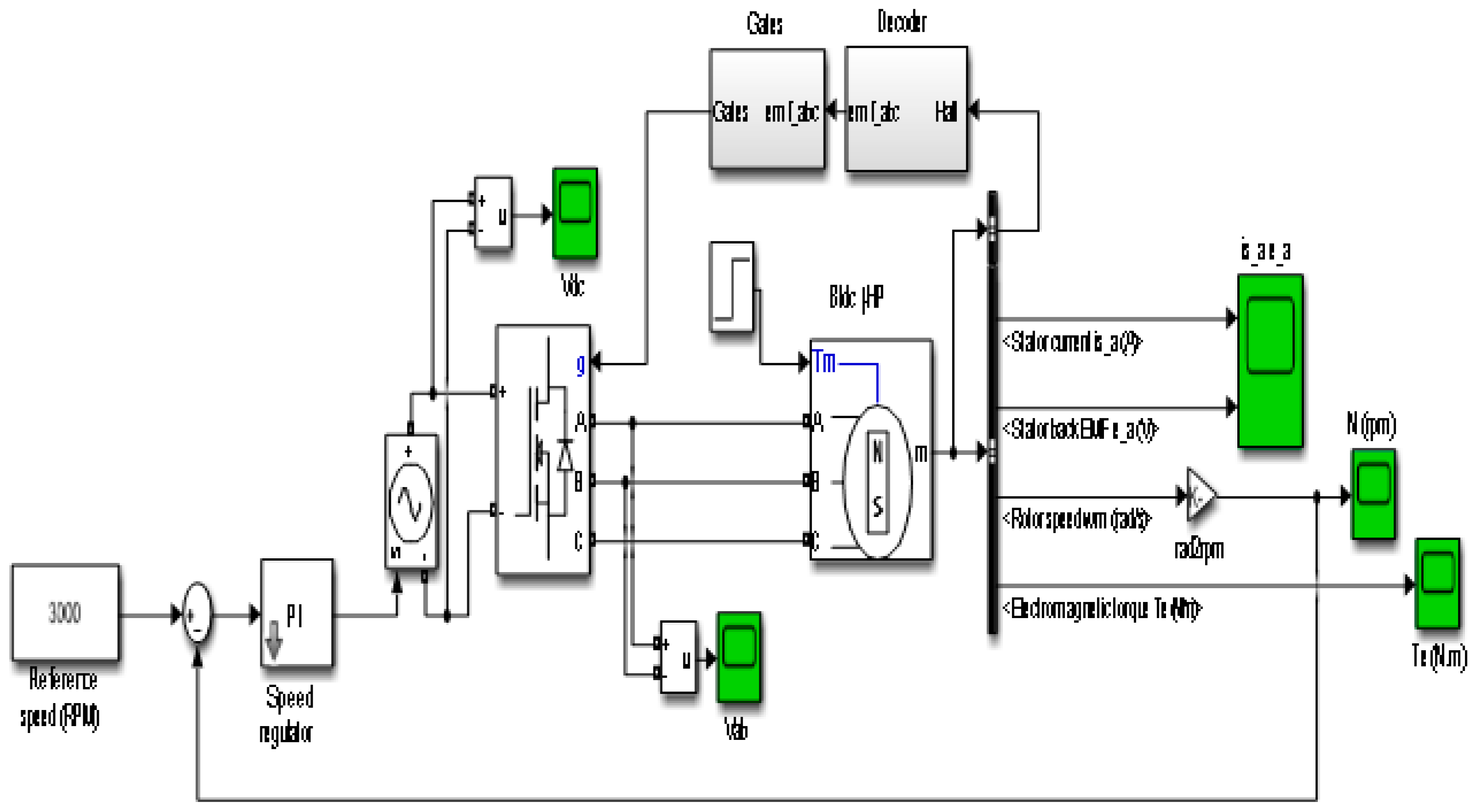
Figure 18.
The coils of a BLDC motor and the rotor is a permanent magnet with two poles.
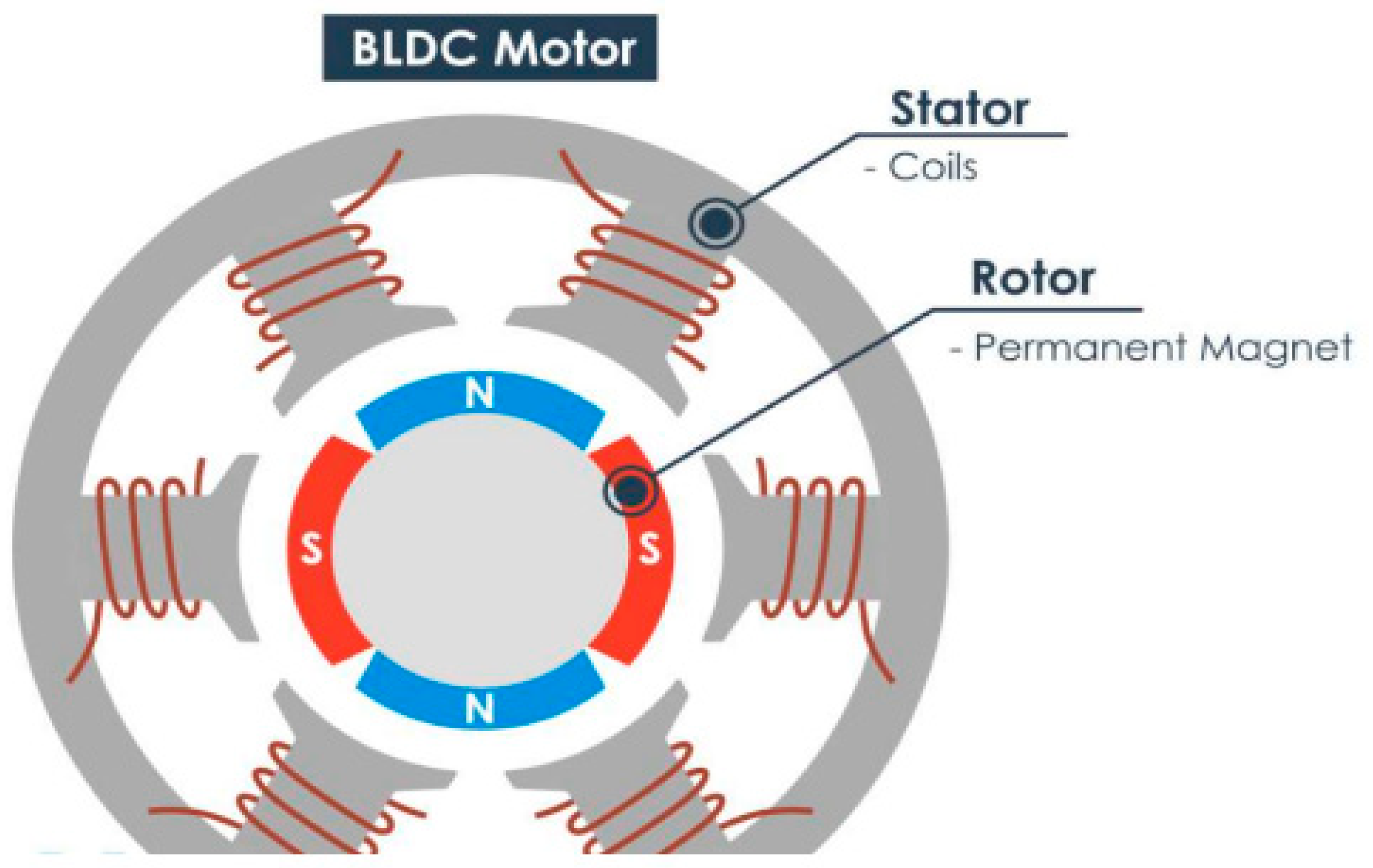
Figure 19.
Hardware logic design structure of BLDCM using Circuit Lab.
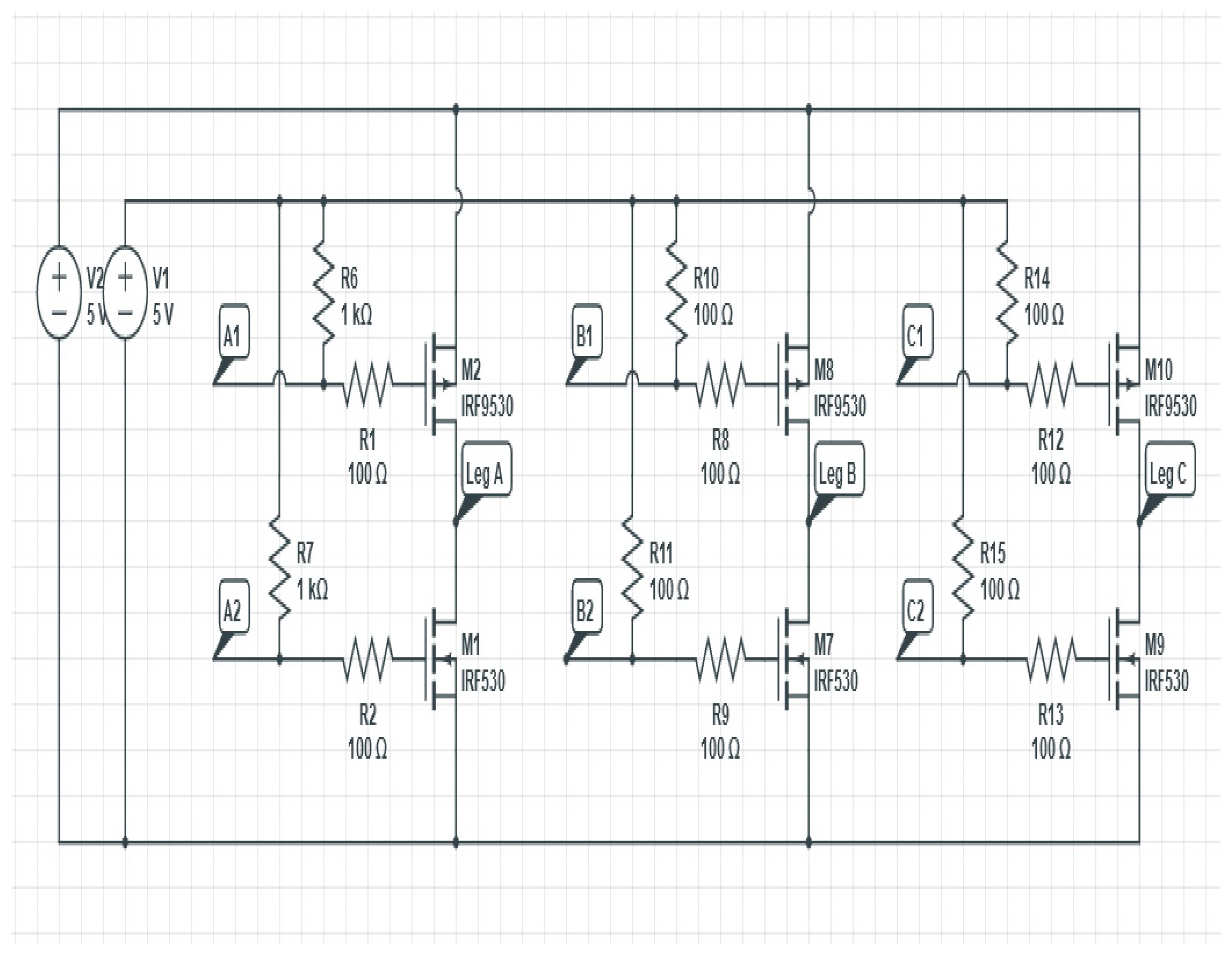
Figure 20.
Beginning of the experimental setup.
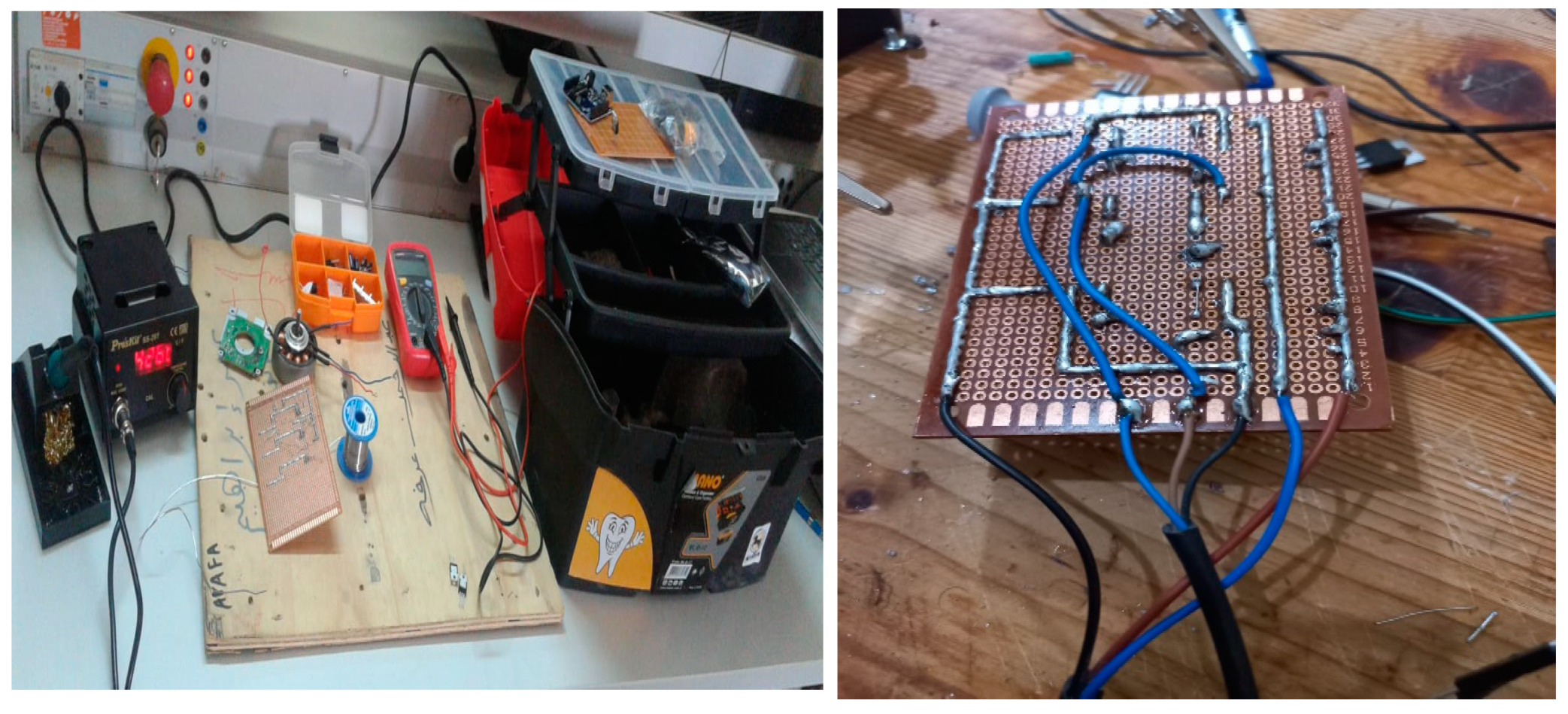
Figure 21.
The BLDC motor's board.
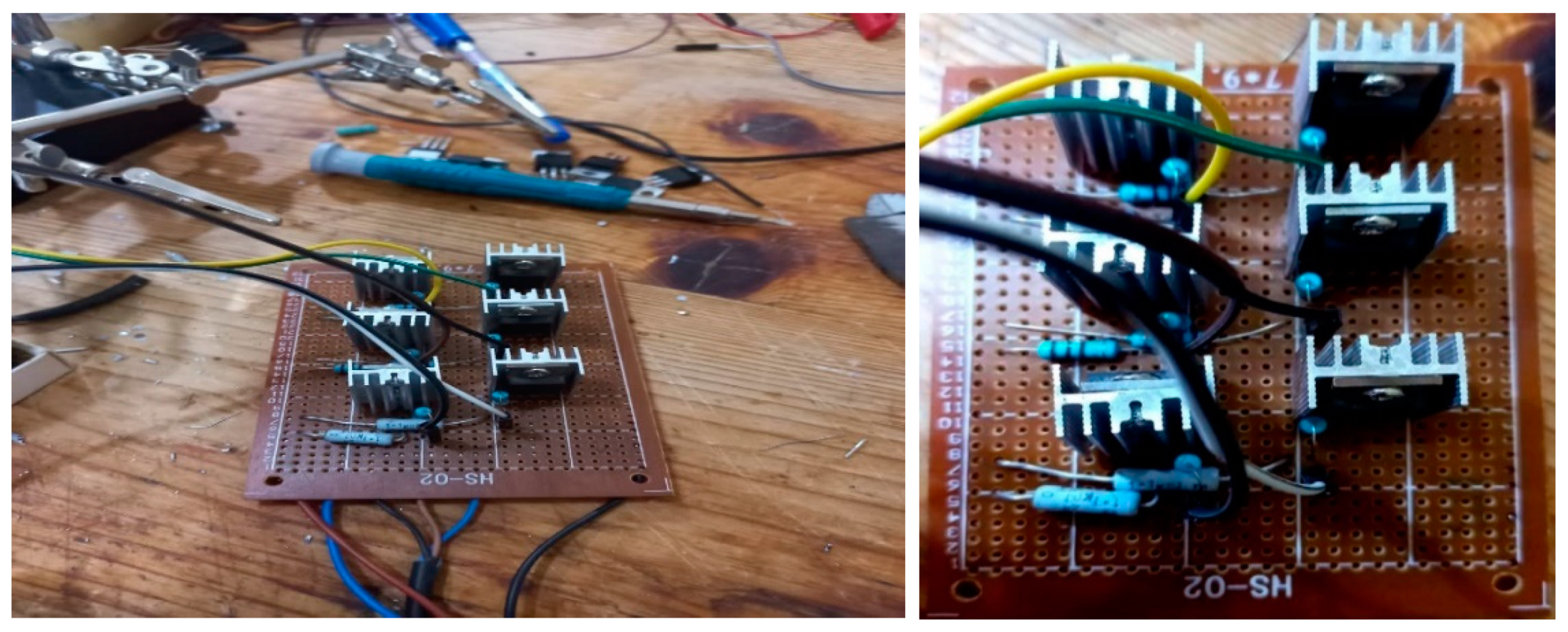
Figure 22.
Run the Circuit required (BLDC motor) using Arduino UNO.
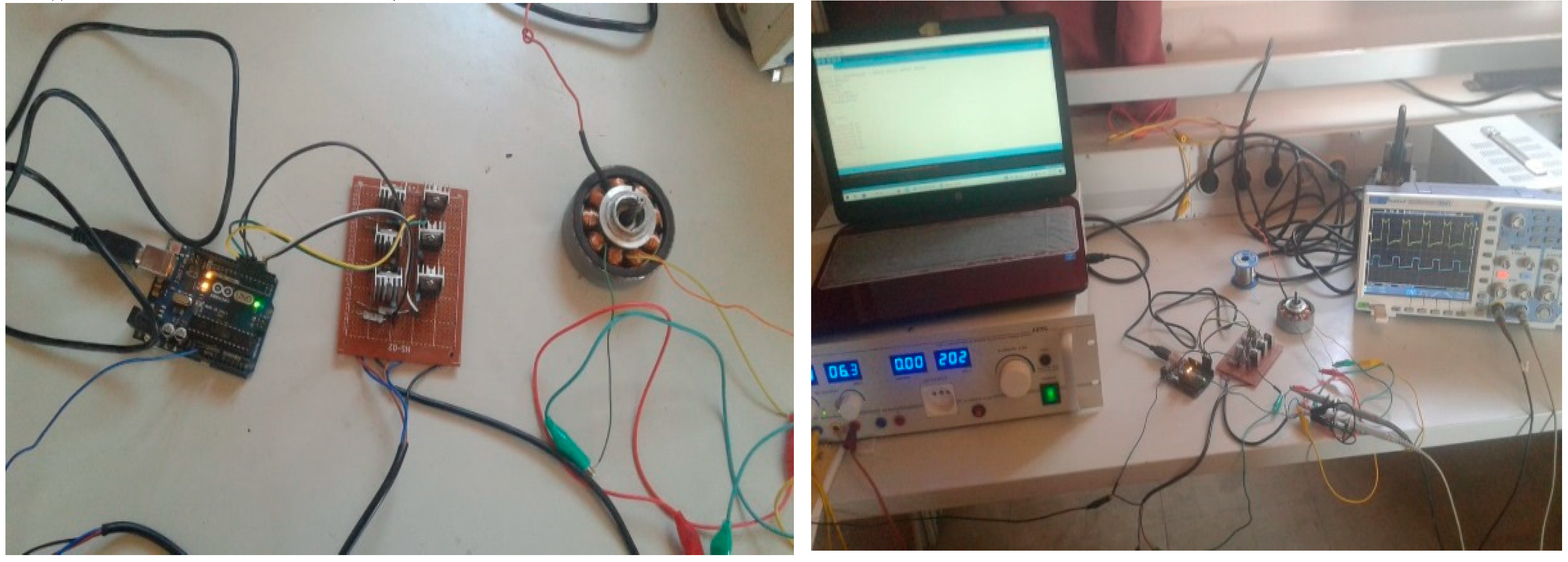
Figure 23.
installed BLDC motor.
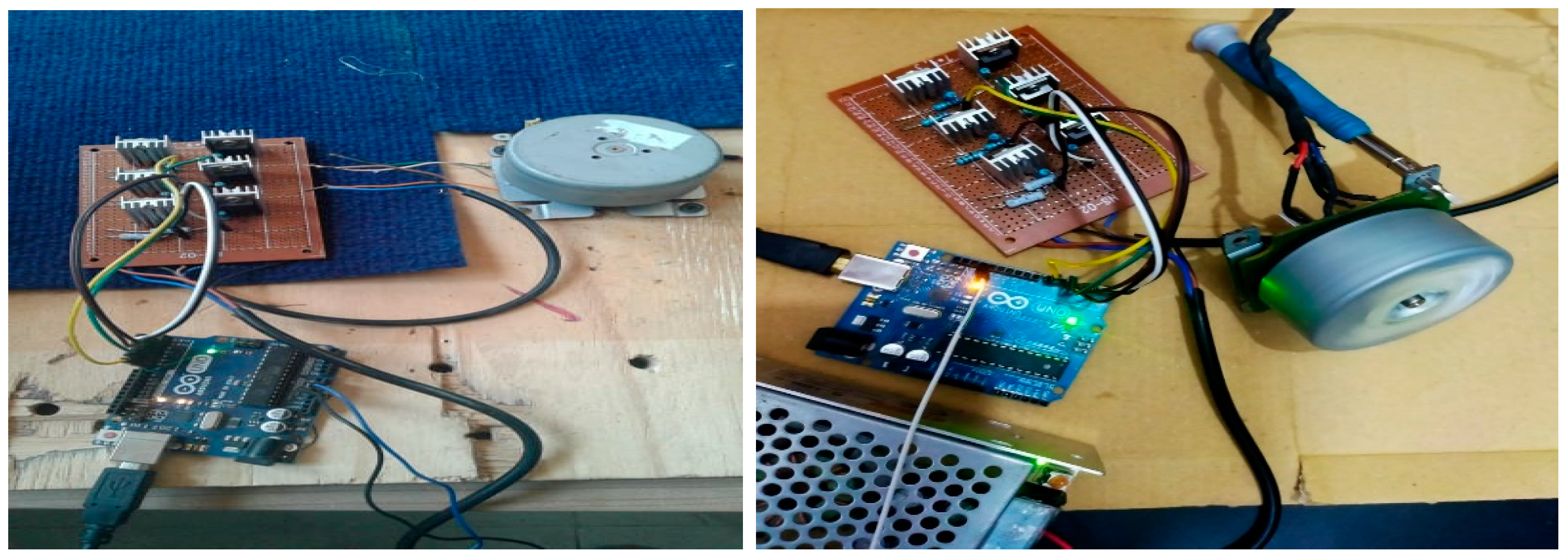
Figure 24.
The experimental phase voltage for phases a,b.
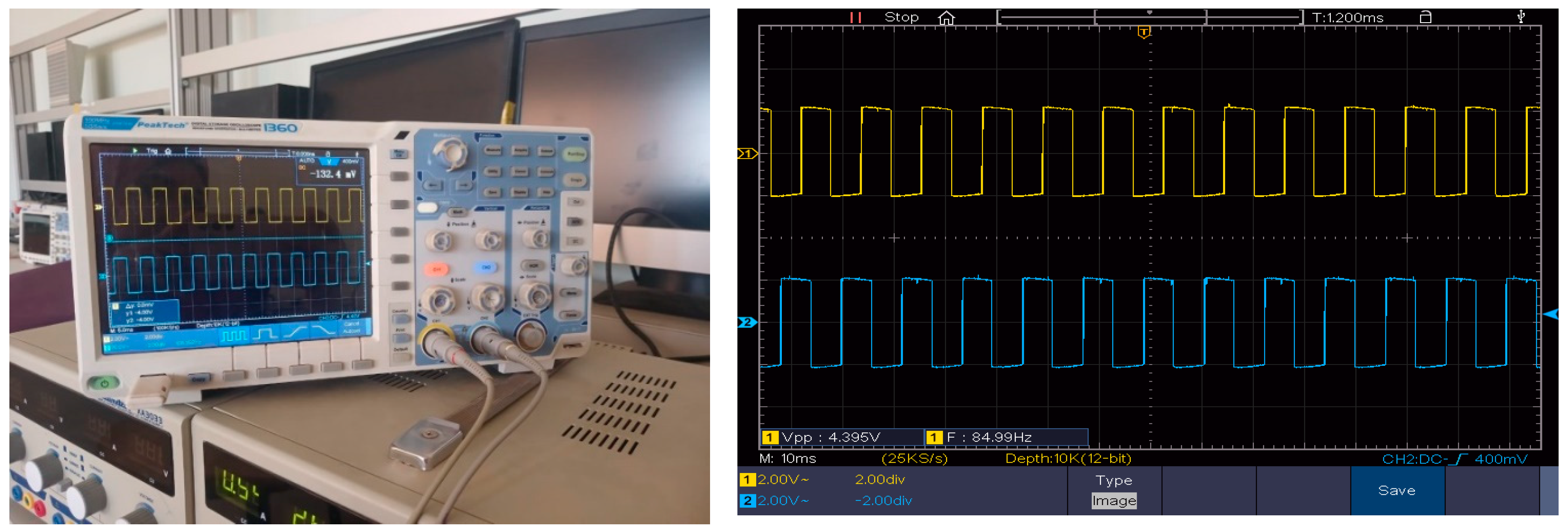
Figure 25.
The experimental phase voltage for phases a,c.
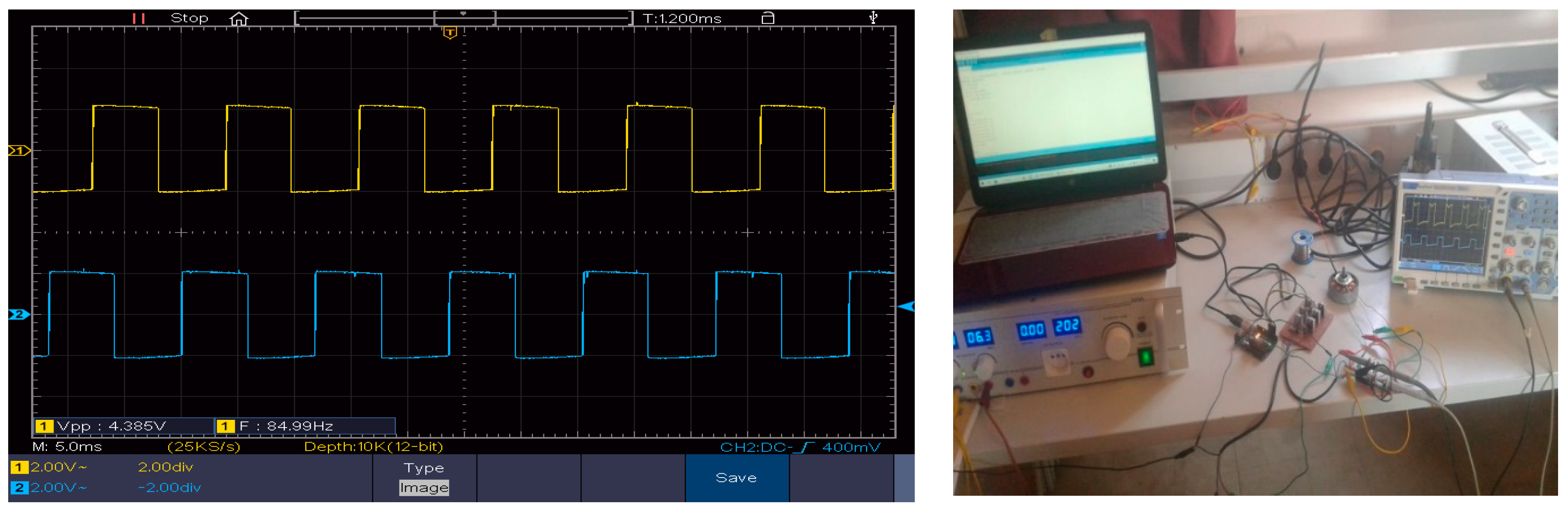
Figure 26.
Voltage waveform of phase A at Mode 1 (variable speed).
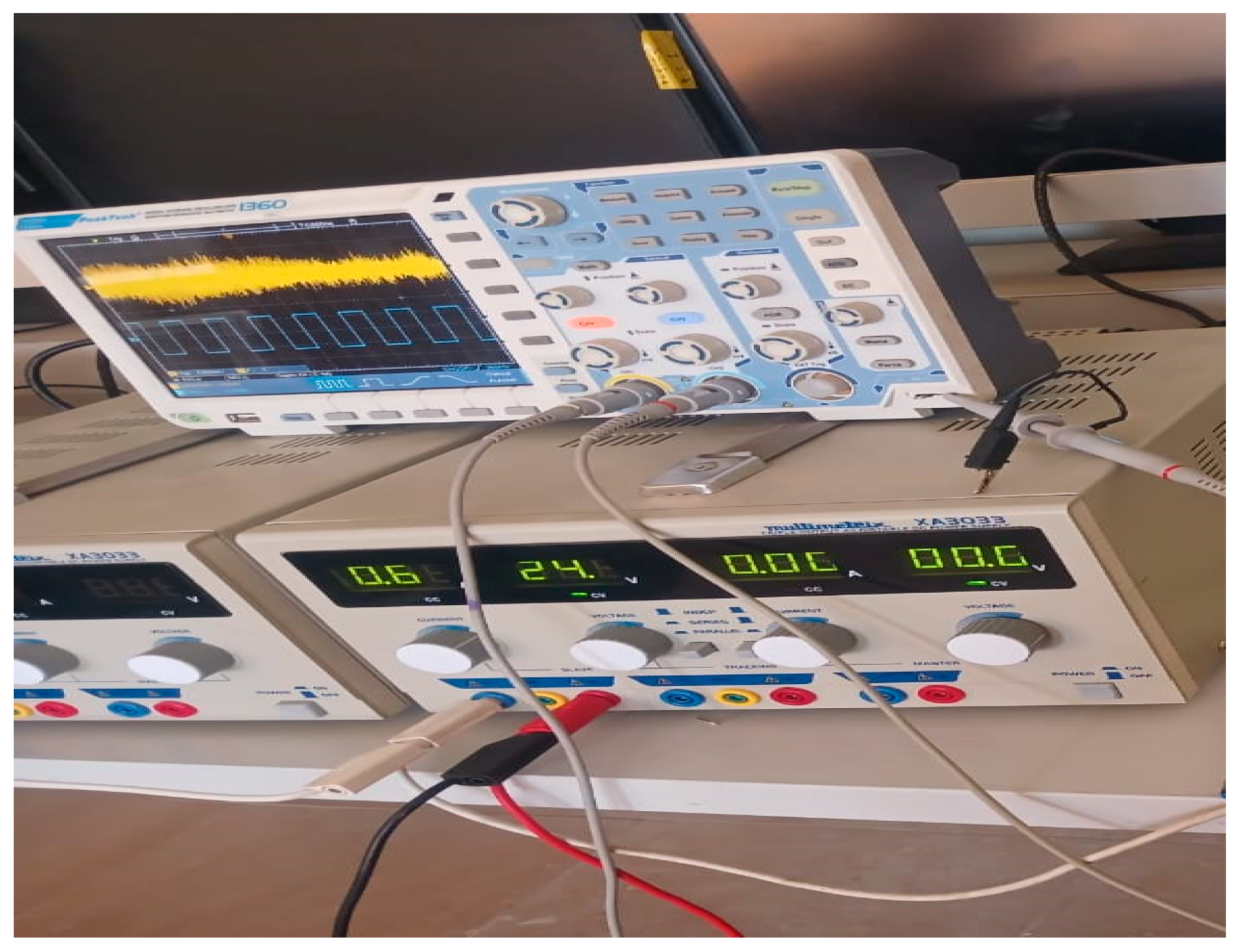
Figure 27.
Voltage waveform of phases A ,B and C.
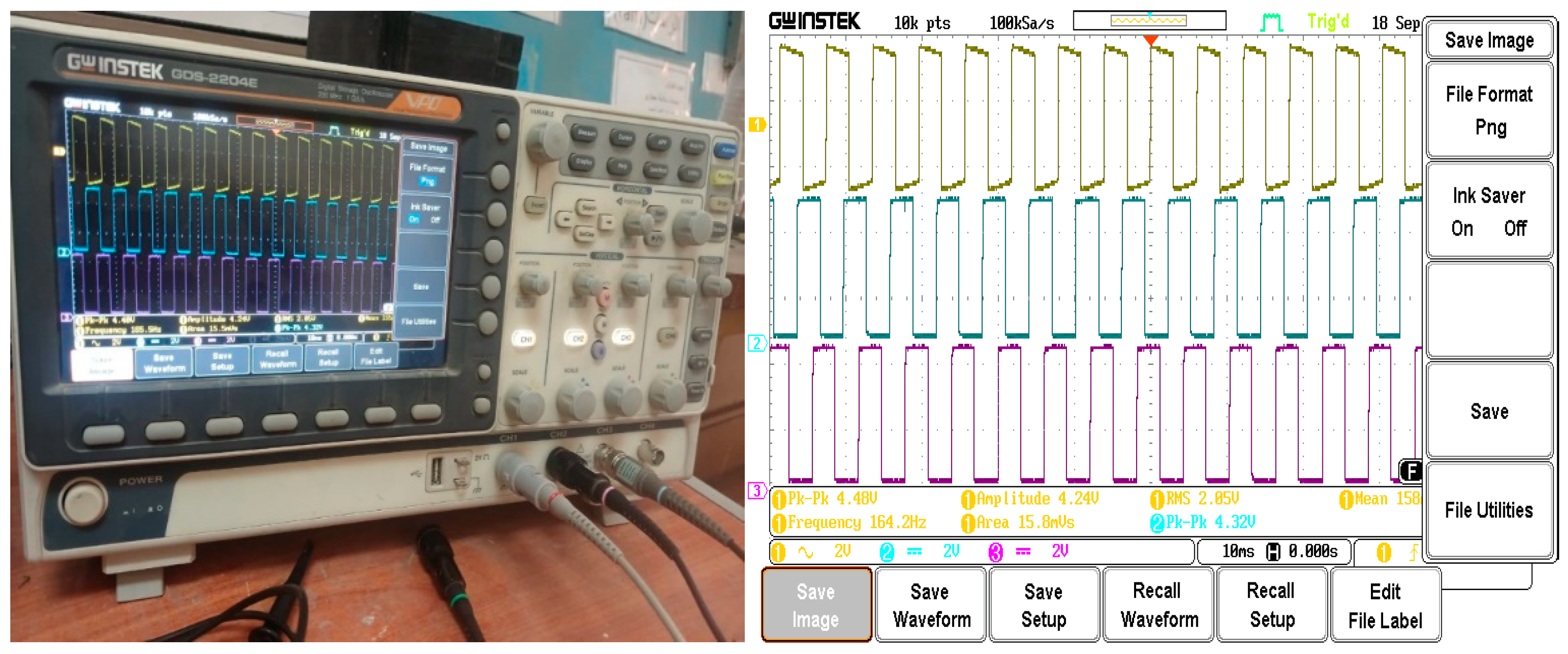
Figure 28.
Voltage waveform of phases A ,B and C with values on oscilloscope.
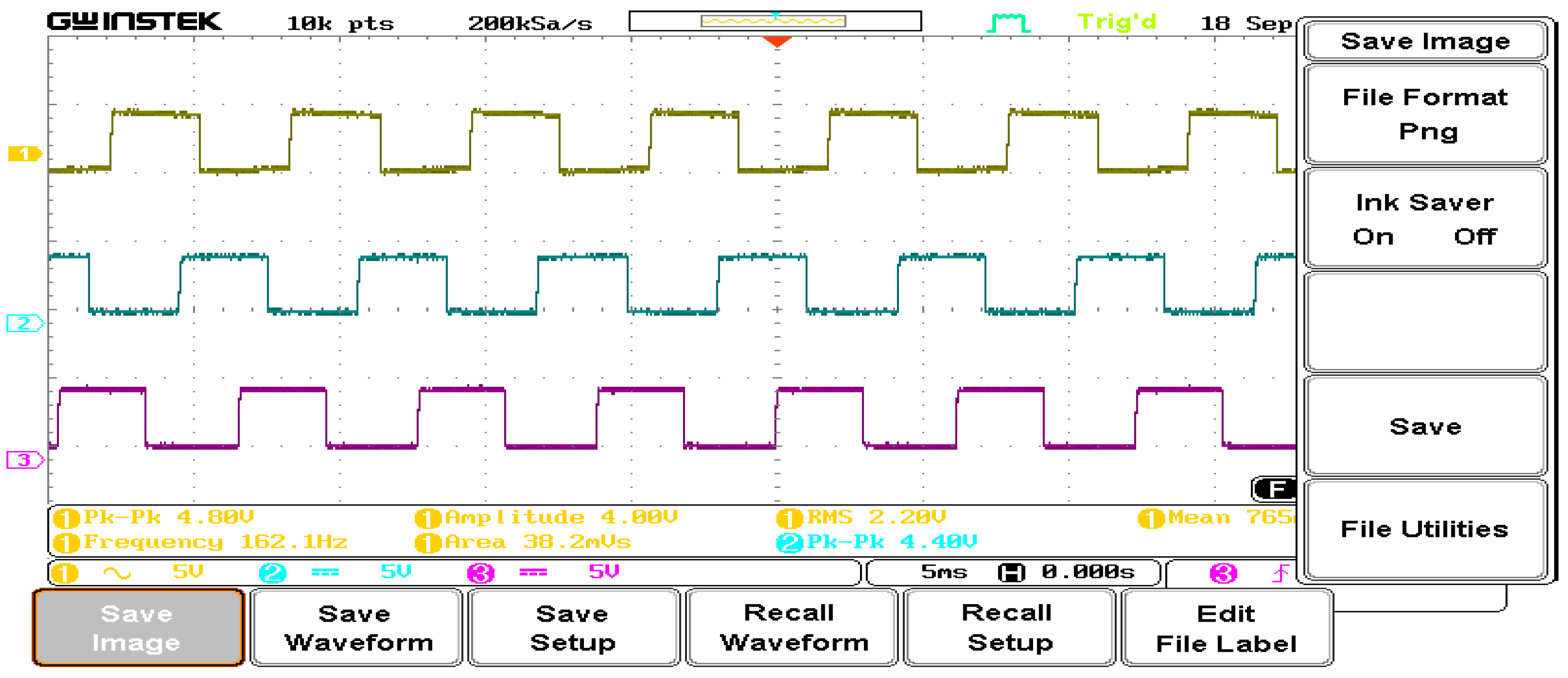
Figure 29.
Voltage waveform of phases A ,B and C with reducing speed.
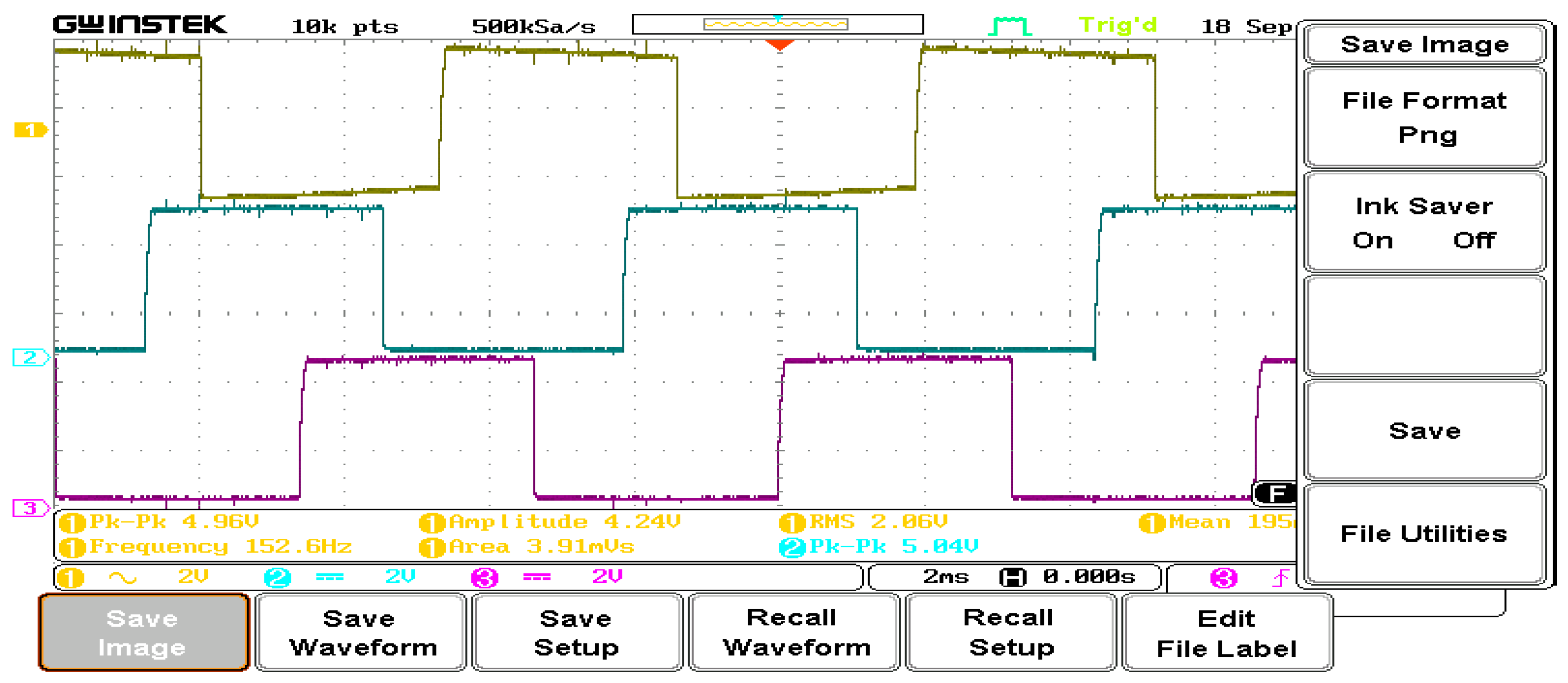
Figure 30.
Voltage waveform of phases A, B and C with very dropping speed.
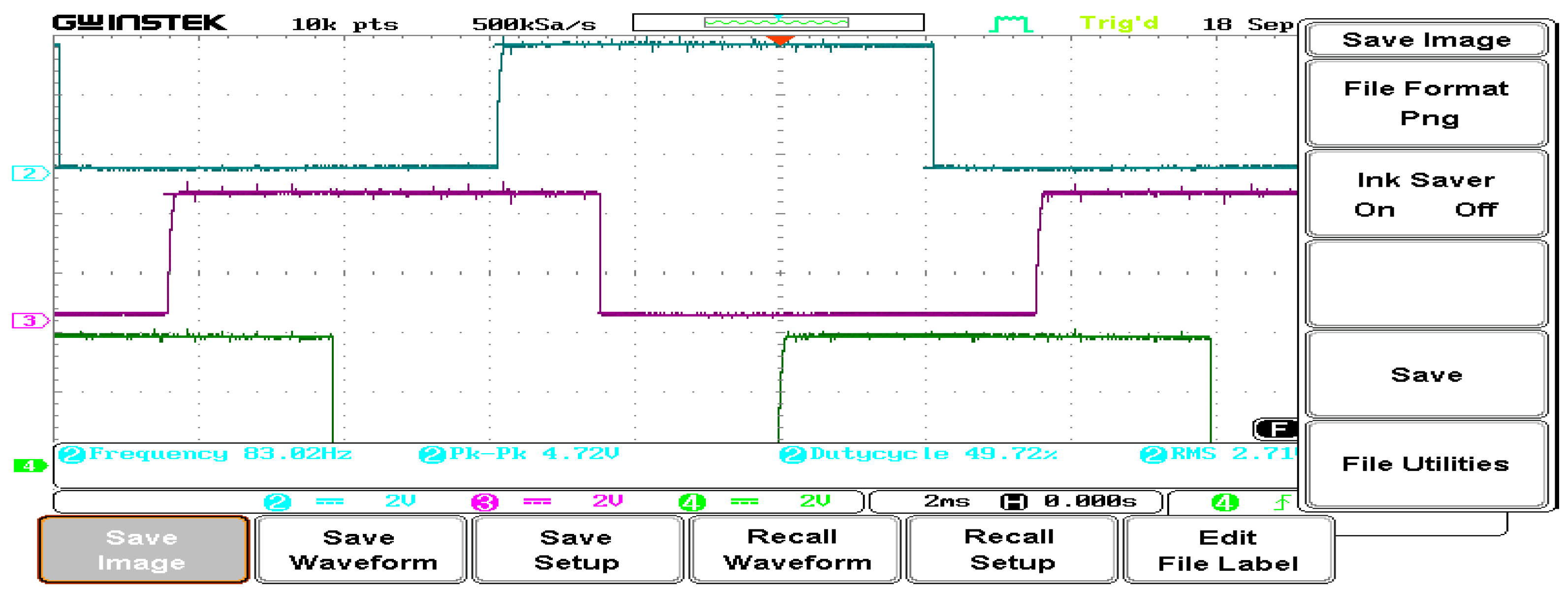

Table 1.
Motors Comparison According to the In-wheel Motor Specifications.
| Features | BLDC motor | SR motor | Induction motor | DC motor |
|---|---|---|---|---|
| Commutation | Electronic | electronic | - | Brushes |
| Slip | - | - | Applicable | - |
| Efficiency | 5 | 3 | 3 | 2 |
| high-speed rating | 5 | 5 | 3 | 3 |
| broader steady power speed range | 3 | 5 | 4 | 2 |
| Complexity of control | 2 | 2 | 3 | 5 |
| Torque/Speed | 5 | 3 | 4 | 3 |
| A responsive dynamic | 5 | 2 | 3 | 4 |
| Power-to-size ratio | 4 | 4 | 3 | 3 |
| The lifetime of an operation | 5 | 5 | 3 | 2 |
| maintenance requirements | 5 | 5 | 4 | 2 |
| Sensitivity to noise | 5 | 2 | 3 | 3 |
| In fault Speed | 3 | 5 | 4 | 2 |
| Torque during a fault | 4 | 2 | 4 | 1 |
| Speed during mechanical shocks | 3 | 4 | 5 | 4 |
| Torque during mechanical shocks | 4 | 2 | 3 | 3 |
| Cost of Production | 2 | 4 | 5 | 5 |
| Total | 60 | 53 | 54 | 44 |
Table 2.
The parameters of circuit components.
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



