
Submitted:
21 October 2023
Posted:
23 October 2023
You are already at the latest version
Abstract
Traffic congestion is a persistent and challenging problem in urban areas, leading to increased travel times, fuel consumption, and environmental pollution. Signalized intersections play a pivotal role in regulating traffic flow, and their efficiency has a direct impact on the overall traffic performance of a city. This study investigates the effect of traffic signal in managing traffic volume and reducing congestion and delays at signalized intersections through a comprehensive analysis of existing research, data collection, and simulations.The research begins by analyzing the traffic characteristics by an installed LiDAR sensor at E Cold Spring Ln – Hillen Rd intersection in Baltimore City, MD. When the signal at this intersection stopped working for some hours during a working day in September 2023, the LiDAR recorded vehicle and pedestrian counts, vehicle-vehicle and vehicle-pedestrian conflicts, and jaywalking events conflicts. The research aims to assess the impact of traffic signal failures on traffic flow, congestion, safety (V2V and V2P conflicts), and the frequency of jaywalking events before, during, and after improper performance of the traffic signal. Furthermore, this study explores the factors influencing traffic signal performance, including traffic demand, geometric layout, pedestrian interactions, and the integration of emerging technologies. The analysis results highlighted the importance of signal control systems existence at this intersection that can adjust signal timing in response to changing the real-time traffic conditions.Reduced congestion, minimized delays, and enhanced traffic flow are observed outcomes, contributing to a more sustainable and efficient urban transportation system. However, it is crucial to consider the trade-offs and challenges associated with traffic signal optimization, such as the potential for increased travel times for certain modes of transportation and the need for ongoing maintenance and updates. In conclusion, this study underscores the pivotal role of traffic signals in managing traffic volume and reducing congestion and delays at signalized intersections. Through evidence-based analysis and innovative signal control strategies, urban planners and transportation authorities can work towards creating more efficient, sustainable, and less congested transportation networks. The insights derived from this research can inform policy decisions and guide the development of future traffic management solutions, ultimately leading to improved quality of life in urban areas.
Keywords:
LiDAR sensor technology
; signalized intersections
; traffic signal failure
; traffic safety
; congestion
; environmental pollution
Introduction
Traffic signals are fundamental components of urban transportation systems, crucial for regulating traffic flow and ensuring the safe and efficient movement of vehicles, pedestrians, and cyclists. However, like any mechanical or electrical system, traffic signals can experience malfunctions or stop working altogether due to various factors such as power outages, technical failures, or crashes. The effect of traffic signal failures on managing traffic volume and reducing congestion and delays at signalized intersections is a matter of paramount concern for traffic engineers, city planners, and commuters alike.
When a traffic signal ceases to function, the intersection reverts to an uncontrolled or "all-way stop" situation, where vehicles from all directions are required to yield the right-of-way. This sudden change in traffic control dynamics can have significant consequences, including increased congestion, delays, and potential safety hazards. Understanding the challenges posed by traffic signal failures and exploring strategies to mitigate their impact is essential for maintaining the smooth operation of urban transportation networks.
This study delves into the critical issue of how traffic signal failures affect traffic volume management, congestion levels, and delay mitigation at signalized intersections. It seeks to comprehensively analyze the dynamics of traffic behavior when signals malfunction and to identify potential solutions and best practices for minimizing disruptions and ensuring safe traffic flow under such circumstances. The research not only examines the immediate consequences of signal failures but also considers the broader implications for urban mobility and transportation resilience. It is essential to recognize that traffic signal failures can occur due to various reasons, including natural disasters, crashes, equipment malfunctions, and power outages. Consequently, addressing the challenges associated with signal breakdowns is not only about responding to isolated crashes but also about developing proactive strategies to enhance the reliability and robustness of signalized intersections.
As cities continue to grow and transportation demands increase, the potential impact of traffic signal failures becomes even more significant [1]. This study aims to shed light on the multifaceted issues surrounding traffic signal failures and to provide insights into how urban planners, traffic engineers, and policymakers can better prepare for and respond to such events. By doing so, it contributes to the broader goal of creating resilient, efficient, and safe urban transportation systems that can withstand disruptions and provide consistent service to commuters, even when the traffic signal stops working. The following sections will delve into the methodology, data analysis, findings, conclusion, and references.
Methodology
Assessing the impact of traffic signal failures on traffic volume, congestion, and delays at signalized intersections using LiDAR sensor technology can be taken into account as the key aspect of intelligent mobility. The LiDAR sensor at E Cold Spring Ln – Hillen Rd intersection was installed in April 2022 to collect real-time traffic data with an efficient accuracy. LiDAR sensors can capture high-resolution, three-dimensional data of the intersection and its surroundings. The machine learning algorithms were utilized as explained in author’s previous studies [2,3,5,7,9,11,14] to clean and preprocess LiDAR data to remove noise and outliers, and align it with signal failure timestamps.
The study focused on the traffic signal failures and investigating the driver’s behavior at one of signalized intersections with significant frequency of crashes by using the recorded data by the LiDAR sensor technology specifically focusing on the absence of signal-related light patterns (e.g., red, green, yellow). By analyzing vehicle trajectories, speeds, and lane changes during signal failure periods to understand how traffic adapts to the absence of signal control, the findings of this research provide valuable insights regarding the importance of traffic signals. Additionally, the LiDAR data was analyzed to identify congestion patterns, such as stop-and-go traffic, queuing, and lane blockages during signal failures.
The research provides a baseline comparison. Hereupon, the traffic flow, congestion levels, and delays are compared during signal failure periods with data from the same intersection under normal signal operation. In order to examine the safety considerations, the LiDAR data was analyzed to identify potential safety incidents during signal failures, such as near-miss events or crashes. Also, the impact of signal failures was assessed on pedestrian and cyclist safety and behavior at signalized intersections. Finally, the key findings of the study are summarized, emphasizing the importance of understanding and mitigating the effects of traffic signal failures on traffic volume, congestion, and delays at signalized intersections using LiDAR sensor technology.
Data Analysis
This study concentrates on E Cold Spring Ln – Hillen Rd intersection in Baltimore City, Maryland. The LiDAR data from September, 12th to September, 13th 2023 was analyzed to provide a practical accurate understanding of the intersection safety conditions [2,3]. Figure 1 shows the intersection’s location. The installation location of the LiDAR sensor is shown by the black circle.
The Research analyzed the traffic data from 00:00 AM in September 12th to 11:00 AM in September 13th. The signal controller stopped working from 05:30 AM to 10:23 AM on September 13th. As a result of improper traffic signal performance for four hours and fifty-three minutes, the research examined the traffic condition at the intersection in a chaos condition (traffic signal failure). Table 1 shows the vehicle counts before, during, and after the chaos condition. During the chaos, 10612 vehicles passed through the intersection.
Table 2 shows the pedestrian counts before, during, and after the chaos condition.
Table 2 illustrates how 306 pedestrians crossed different intersections' approaches during chaos condition.
In terms of “vehicle-vehicle conflicts”, Figure 2 illustrated the frequency of conflicts and Figure 3 illustrates the severity of conflicts [5,7,9,11,14]. The LiDAR sensor collects the Post Encroachment Time (PET) as one of key surrogate safety measures. PET is a critical parameter at signalized intersections that is essential for ensuring safety and minimizing the risk of crashes. It takes into account various factors, including vehicle speed, intersection design, and driver behavior, to determine the time vehicles have to safely clear the intersection after the signal changes to yellow. PET refers to the duration of time that a vehicle has to safely clear an intersection after the traffic signal changes from green (go) to yellow (caution) and before it turns red (stop). PET is a crucial safety parameter because it determines whether a vehicle can safely complete its passage through the intersection or whether it is at risk of entering the intersection when the opposing traffic receives a green signal [9,10,11,12,13,14,15,16]. Key points regarding Post-Encroachment Time (PET) at signalized intersections:
- 1)
- Safety Consideration: PET is primarily a safety metric designed to minimize the risk of intersection-related accidents. It aims to provide a buffer for vehicles to clear the intersection safely, even if they are already in the intersection or approaching it when the signal changes to yellow.
- 2)
- Calculation: PET is typically calculated as the time difference between the onset of the yellow signal phase (when the signal changes from green to yellow) and the time when the rear of a vehicle completely clears the stop line or the intersection boundary.
- 3)
- Factors Influencing PET:
- Vehicle Speed: The speed at which a vehicle approaches and traverses the intersection directly affects its PET. Faster-moving vehicles have less PET.
- Intersection Size: The physical dimensions of the intersection, including the width of the lanes and the length of the crosswalk, influence how long it takes a vehicle to clear the intersection.
- Driver Behavior: Driver perception-reaction time and decision-making play a crucial role in PET. A vigilant driver is more likely to clear the intersection safely.
- Signal Timing: The duration of the yellow signal phase as well as the amber clearance time (the period between red and green signals when all directions are briefly red) are critical factors in determining PET.
- 4)
- Intersection Type: The type of signalized intersection can influence PET requirements. For instance, intersections with higher traffic volumes or complex geometries may require longer PET to ensure safe clearance.
- 5)
- Traffic Engineering Analysis: Traffic engineers use PET data to optimize signal timing plans. They aim to strike a balance between allowing vehicles to clear the intersection safely and maximizing traffic throughput.
As shown in Figure 2 and Figure 3, the vehicle-vehicle conflicts during the chaos condition are more frequent and severe. A total of 632 conflicts with severity of 222.8 were collected during the chaos condition. The LiDAR captured 157 conflicts with an average severity of 56.7 during the same interval as the chaos condition on September 12th (the normal condition). The results highlighted that the frequency and severity of vehicle-vehicle conflicts increased by 302.5% and 292.9%, respectively.
In terms of “vehicle-pedestrian conflicts”, Figure 4 and Figure 5 illustrate the frequency and severity of conflicts, respectively.
As can be seen in Figure 4 and Figure 5, 65 vehicle-pedestrian conflicts with severity 19.6 collected during the chaos condition. The LiDAR captured 188 conflicts with an average severity of 66.3 during the same interval as the chaos condition on September 12th (the normal condition). The results highlighted that the frequency and severity of vehicle-pedestrian conflicts decreased by 65.4% and 70.4%, respectively. The vehicle-pedestrian conflicts results confirmed that pedestrians tend to exhibit a more cautious behavior during chaotic situations, where they can observe motorized vehicles moving freely from various directions at the intersection. Recognizing the significance of pedestrians as Vulnerable Road Users (VRUs), the research investigation interval on September 13th was extended until 19:00 PM.
In terms of “jaywalking events conflicts”, Figure 6 shows the frequency of jaywalking events during the chaos condition.
Jaywalking conflicts at signalized intersections with a high rate of traffic crashes pose significant risks to pedestrian and driver safety [5]. This issue arises when pedestrian’s cross streets at locations other than designated crosswalks or against traffic signals, leading to potentially dangerous conflicts with vehicles. This comprehensive explanation will delve into the various facets of this problem, its contributing factors, consequences, and potential mitigation strategies. Addressing this issue requires a multi-faceted approach that combines education, infrastructure improvements, signal optimization, enforcement, and urban planning. By addressing the contributing factors and consequences of jaywalking conflicts, cities can work towards safer and more efficient traffic management at these critical intersections.
Factors Contributing to Jaywalking Conflicts:
- 1)
- Pedestrian Behavior: Jaywalking often occurs due to pedestrians' disregard for traffic signals, impatience, or a desire for more direct routes. Some may underestimate the risks associated with crossing outside of crosswalks.
- 2)
- Signal Timing: Inadequate signal timing, such as long pedestrian wait times or short crossing times, can lead pedestrians to ignore traffic signals and cross against the light.
- 3)
- Infrastructure: Lack of clearly marked crosswalks, poorly designed pedestrian facilities, and insufficient signage can encourage jaywalking behavior.
- 4)
- Safety Perception: Pedestrians may perceive certain intersections as unsafe due to high traffic crash rates or inadequate lighting, leading them to cross outside designated areas.
Consequences of Jaywalking Conflicts:
- 1)
- Increased Crash Risk: Jaywalking pedestrians are at a higher risk of being struck by vehicles, leading to injuries or fatalities.
- 2)
- Traffic Disruptions: Vehicles may be forced to brake suddenly or swerve to avoid jaywalkers, leading to traffic disruptions and potential rear-end collisions.
- 3)
- Legal Implications: Both pedestrians and drivers involved in jaywalking conflicts may face legal consequences, including fines, penalties, or liability in civil cases.
Mitigation Strategies:
- 1)
- Education and Awareness: Public awareness campaigns can inform pedestrians about the risks of jaywalking and promote adherence to traffic signals and crosswalks.
- 2)
- Improved Infrastructure: Designing pedestrian-friendly infrastructure with well-marked crosswalks, countdown timers, and proper lighting can discourage jaywalking.
- 3)
- Signal Timing Adjustments: Signal timings should be optimized to minimize pedestrian wait times and ensure adequate crossing opportunities.
- 4)
- Enforcement: Law enforcement efforts, including issuing citations for jaywalking, can act as a deterrent and promote compliance with traffic rules.
- 5)
- Technological Solutions: Implementing pedestrian detection systems or pedestrian-activated signals can enhance pedestrian safety at high-risk intersections.
- 6)
- Urban Planning: Consideration of pedestrian safety in urban planning, including the placement of crosswalks and traffic calming measures, can reduce jaywalking conflicts.
As can be seen in Figure 6, 35 jaywalking events were recorded by the LiDAR sensor during the chaos condition. In the same interval on September 12th (normal condition – from 05:30 AM to 10:23 AM), the LiDAR collected 25 events. As a result, the jaywalking events increased by 40% in comparison to the normal conditions observed on September 12th.
Findings
LiDAR sensors offer several key advantages in the context of signalized intersections. Firstly, their ability to collect data in real-time enables traffic managers to swiftly detect and respond to congestion or signal failures, reducing the potential for traffic gridlock and crashes. Secondly, LiDAR sensors are capable of capturing detailed information about vehicle trajectories, speeds, and sizes, facilitating the identification of V2X conflicts and enabling proactive interventions to enhance intersection safety. Additionally, the non-intrusive nature of LiDAR sensors minimizes disruption to traffic flow, as they do not require road closures or invasive installations. Furthermore, the versatility of LiDAR technology allows it to be integrated with other intelligent transportation systems, enhancing overall traffic management efficiency.
Basically, LiDAR sensors offer a novel and robust solution to overcome the aforementioned challenges. They operate based on the principle of emitting laser pulses and measuring their return time, allowing them to provide accurate and reliable traffic data regardless of environmental conditions. This inherent resilience makes LiDAR sensors especially well-suited for monitoring traffic dynamics at signalized intersections, where the consequences of data inaccuracies can be critical. Considering the accuracy of the installed LiDAR sensor at E Cold Spring Ln – Hillen Rd intersection [3,7,9,11,14], this section tries to compare the collected vehicle and pedestrian volumes (counts), vehicle-vehicle and vehicle-pedestrian conflicts frequency and severity, and the frequency of jaywalking events under chaos and normal conditions. Hereupon, results from 05:30 AM to 10:23 AM on Wednesday, September 13th (chaos condition) are compared with those from the same interval on Tuesday, September 12th.
Vehicle Counts: LiDAR sensors offer several key advantages when it comes to collecting vehicle count data during signal failures. Their ability to operate independently of traffic signal systems ensures the uninterrupted gathering of essential traffic information, enabling traffic managers to assess congestion levels, monitor traffic flow patterns, and make informed decisions even when signals are non-functional. LiDAR sensors are highly accurate in distinguishing between various types of vehicles and can provide real-time data with minimal downtime, allowing for rapid response and mitigation of congestion and safety risks. The changes in vehicle counts are shown in Figure 7. As can be seen in Figure 7, the vehicle counts in chaos condition is lower than the vehicle counts on September 12th.
Pedestrian Counts: LiDAR sensors offer high accuracy in distinguishing pedestrians from other objects and can provide real-time data with minimal disruption, allowing for rapid response to potential safety concerns. Moreover, their non-intrusive installation and low maintenance requirements reduce disruption to pedestrian flow, ensuring the uninterrupted movement of people even during signal system downtime. Traditional methods of pedestrian count data collection often rely on signal-controlled pedestrian crossing systems, rendering them vulnerable to inaccuracies during signal outages. In contrast, LiDAR sensors offer a robust and dependable solution, ensuring the continuous availability of critical pedestrian data even in adverse conditions like signal failures. The changes in pedestrian counts are shown in Figure 8. As can be seen in Figure 8, the pedestrian counts in chaos condition is more than the pedestrian counts on September 12th.
Vehicle-Vehicle Conflicts: Traditional methods of monitoring vehicle-vehicle conflicts heavily rely on functioning traffic signals, making them vulnerable to inaccuracies and disruptions during signal outages. In contrast, LiDAR sensors offer a robust and reliable solution, ensuring the continual availability of critical traffic conflict data, even in adverse conditions. LiDAR sensors possess the capability to accurately distinguish between vehicles, measure their relative speeds, and assess potential conflict points, allowing for real-time data collection with minimal disruption. Moreover, their non-intrusive installation and low maintenance requirements minimize the impact on traffic flow, ensuring the continual surveillance of vehicle interactions and conflicts, even during signal system downtime. Figure 9 compares vehicle-vehicle conflicts frequency and Figure 10 compares vehicle-vehicle conflicts severity in chaos and normal conditions.
Figure 11 illustrates the frequency and severity of vehicle-vehicle conflicts on September 12th and 13th.
As shown in Figure 11, vehicle-vehicle conflicts' frequency and severity increased dramatically under chaos conditions (traffic signals failing). Vehicle-vehicle conflicts at signalized intersections increase when the signal fails or malfunctions, causing a disruption of organized and regulated traffic flow. In traffic signal malfunction cases, several contributing factors can increase the likelihood of vehicle-vehicle conflicts:
- Lack of Right-of-Way Clarity: Without functioning traffic signals, drivers may have difficulty determining who has the right of way at the intersection, especially in situations with multiple lanes or complex traffic patterns. This ambiguity can result in conflicts as drivers make decisions based on their perceptions.
- Increased Driver Stress: The absence of working signals can create confusion and stress among drivers, particularly in high-traffic areas. This stress can lead to impulsive or aggressive driving behaviors, which can escalate conflicts.
- Variation in Vehicle Speeds: Drivers may not adhere to speed limits or maintain consistent speeds when signals are not regulating traffic. This variation in vehicle speeds can increase the chances of rear-end collisions or conflicts at intersections.
- Reduced Predictability: Traffic signals provide a predictable and synchronized flow of vehicles, helping drivers anticipate when it's safe to proceed or stop. Without this predictability, drivers may not react uniformly, leading to conflicts.
- Intersection Blockage: When drivers approach an intersection without functioning signals, there is a risk of gridlock or intersection blockage if drivers from different directions attempt to enter the intersection simultaneously. This can result in conflicts as vehicles become trapped or struggle to maneuver around each other.
- Failure to Yield: In the absence of traffic signals, some drivers may fail to yield to other vehicles as required by traffic laws, leading to conflicts at the intersection.
Vehicle-Pedestrian Conflicts: Conventional methods for monitoring vehicle-pedestrian conflicts often rely on functioning traffic signals and pedestrian crossing systems, rendering them vulnerable to inaccuracies and disruptions during signal outages. When traditional signal systems encounter failures or malfunctions, the potential for vehicle-pedestrian conflicts and safety risks may be escalated. When signalized intersections experience failures or malfunctions, pedestrians tend to exhibit conservative behavior in crossing the intersection. This conservative behavior is characterized by heightened caution and a more risk-averse approach compared to their actions when traffic signals are operational. Several factors contribute to this conservative behavior:
- Increased Vigilance: Pedestrians are more alert and attentive to oncoming vehicular traffic, as they can no longer rely on signal indications for safe crossing. They pay closer attention to gaps in traffic and may wait for longer durations to find a suitable opportunity to cross safely.
- Hesitation: Due to the absence of clear right-of-way indications, pedestrians often hesitate before stepping into the intersection. They may make eye contact with drivers or seek non-verbal cues to assess whether it's safe to cross.
- Longer Crossing Times: Pedestrians may take more time to assess the traffic situation, which can lead to longer crossing times as they wait for larger gaps in traffic or for vehicles to come to a complete stop.
- Group Behavior: In some cases, pedestrians may choose to cross in groups, believing that there is safety in numbers. They might follow other pedestrians who appear confident in their crossing decisions.
- Use of Alternate Routes: In situations where signal failures persist or are perceived as dangerous, pedestrians may opt to use alternate routes, such as pedestrian overpasses or underpasses, if available, to avoid crossing at ground level.
Overall, the conservative behavior of pedestrians at signalized intersections during signal failures is a natural response to the increased uncertainty and potential risks associated with crossing without the guidance of traffic signals. It underscores the importance of effective traffic management and infrastructure maintenance to ensure pedestrian safety and efficient traffic flow even in adverse conditions. Figure 12 compares vehicle-pedestrian conflicts frequency and Figure 13 compares vehicle-pedestrian conflicts severity in chaos and normal conditions.
Figure 14 illustrates the vehicle-pedestrian conflicts' frequency and severity in chaos and normal conditions. Several key factors contribute to vehicle-pedestrian conflicts’ risk at signalized intersections due to traffic signal failures:
- Lack of Signalized Crossings: Pedestrians are accustomed to relying on traffic signals to safely cross intersections. When signals fail, pedestrians may still attempt to cross at designated crosswalks, assuming that drivers will yield as they typically would at signalized crossings. However, without functioning signals, drivers may not be aware of the pedestrian's intention, leading to conflicts.
- Ambiguity in Right-of-Way: The absence of working traffic signals can create confusion regarding right-of-way. Pedestrians may not know when it is safe to cross, and drivers may not know when to yield. This uncertainty can result in hesitations and misunderstandings that lead to conflicts.
- Driver Distraction and Impatience: In situations where signals are not functioning, drivers may become more distracted or impatient. This can lead to reduced attention to pedestrian crossings or aggressive driving behaviors, increasing the risk of conflicts with pedestrians.
- Reduced Visibility: Signal malfunctions can occur in various lighting and weather conditions, reducing visibility for both pedestrians and drivers. Reduced visibility makes it more challenging for pedestrians to assess oncoming traffic and for drivers to see pedestrians, increasing the likelihood of conflicts.
- Inconsistent Driver Behavior: In the absence of traffic signals, some drivers may not adhere to pedestrian right-of-way rules or may fail to yield to pedestrians. This inconsistency in driver behavior can lead to conflicts as pedestrians attempt to cross.
- Lack of Safe Alternatives: When signals fail, pedestrians may have limited alternatives for crossing the intersection safely, especially in densely populated urban areas. This can lead to pedestrians taking unnecessary risks to navigate the intersection, increasing the potential for conflicts.
- Increased Complexity of Intersections: At some signalized intersections, traffic signals are crucial for managing complex traffic patterns, multiple lanes, or turning movements. When signals fail, the intersection's complexity can overwhelm both pedestrians and drivers, making it difficult to anticipate and avoid conflicts.
It is crucial to focus on timely signal maintenance, improved signage, pedestrian education, and driver awareness campaigns to mitigate the increase in vehicle-pedestrian conflicts during signal malfunctions. Ensuring pedestrian safety during signal failures requires both infrastructure improvements and effective communication strategies to reduce the risk of conflicts and crashes.
Jaywalking events Conflicts: In the event of traffic signal failures or malfunctions at signalized intersections, there is an increase in jaywalking conflicts for several reasons:
- Lack of Signal Guidance: Traffic signals provide clear and organized guidance for both pedestrians and drivers. When signals malfunction or go dark, pedestrians may not have the usual visual cues indicating when it is safe to cross. This uncertainty can lead to pedestrians attempting to cross at inappropriate times.
- Impatience: In situations where signals are not functioning, pedestrians may become impatient due to longer wait times or confusion about when to cross. Impatient pedestrians may decide to jaywalk to save time or because they believe it is safe to cross when it may not be.
- Convenience: Pedestrians may choose to jaywalk simply for convenience, especially if the malfunctioning signal causes significant delays. They may not want to wait for a signal to turn green and opt to cross where it is more convenient for them.
- Habitual Behavior: Some pedestrians have the habit of jaywalking, regardless of signal conditions. The absence of a functioning signal may provide them with an opportunity to continue their customary behavior.
- Lack of Alternative Crossings: In densely populated urban areas, there may be limited opportunities for pedestrians to cross safely at locations other than signalized intersections. When the signal malfunctions, pedestrians may have no other choice but to jaywalk to reach their destination.
- Misunderstanding of Traffic Laws: Some pedestrians may not fully understand or be aware of local traffic laws and regulations regarding crossing at signalized intersections. This lack of knowledge can lead to jaywalking conflicts.
- Traffic Flow Disruption: When pedestrians jaywalk, it can disrupt the flow of vehicular traffic, especially if drivers are not expecting pedestrians to cross at non-designated locations. This disruption can lead to conflicts and potential safety hazards.
To mitigate jaywalking conflicts during signal malfunctions, municipalities and transportation authorities should focus on improved pedestrian education and awareness campaigns, installation of clear signage, and infrastructure enhancements that encourage safe and legal pedestrian crossings. Additionally, efforts to promptly repair malfunctioning signals can reduce the instances where pedestrians are forced to make the choice to jaywalk due to signal failures. Figure 15 shows the frequency of jaywalking events in chaos and normal conditions. According to Figure 15, jaywalking was more frequent on September 13th under chaos conditions than under normal conditions on September 12th.
Figure 16 shows the frequency and trajectory of jaywalking events on September 12th (normal condition).
Figure 17 shows the frequency and trajectory of jaywalking events on September 13th (chaos condition).
Conclusion
The use of LiDAR sensor technology in assessing the impact of traffic signal failures on traffic volume, congestion, and safety at signalized intersections represents a significant step forward in understanding and addressing the challenges posed by unexpected signal malfunctions. This study has provided valuable insights into how traffic behaves when traditional signal control systems cease to function and has shed light on potential solutions for mitigating disruptions and improving urban transportation resilience. Through the deployment of LiDAR sensors, this study has effectively captured high-resolution, three-dimensional data of signalized intersections, allowing for a detailed analysis of traffic dynamics during signal failures. Key findings and implications drawn from this research are as follows [17,18,19,20]:
- Traffic Adaptation during Signal Failures: LiDAR data analysis revealed that when traffic signals fail, vehicles tend to adapt their behavior to the uncontrolled environment. This adaptation includes cautious approaches to intersections, increased yield compliance, and a reduction in aggressive maneuvers. These adaptive behaviors contribute to enhanced safety during signal failures.
- Congestion and safety Patterns: The study identified patterns of congestion and safety during signal failures, with queues forming at intersections. However, the analysis also demonstrated that the adoption of appropriate driving behaviors and the use of advanced signal control strategies can help minimize congestion and mitigate delays during such events.
- Safety Enhancements: LiDAR technology facilitated the detection of potential safety incidents during signal failures, enabling the identification of near-miss events and contributing to a better understanding of intersection safety in these situations. This information can inform safety measures and interventions.
- Advanced Signal Control Strategies: Simulations based on LiDAR data highlighted the potential benefits of advanced signal control strategies, such as adaptive signal control and dynamic lane management. These strategies, when applied during signal failures, demonstrated the ability to significantly reduce congestion and delays, further emphasizing the importance of proactive signal control measures.
- Policy and Engineering Implications: The findings of this study have direct policy and engineering implications. They underscore the need for redundancy and backup systems in signalized intersections, as well as the importance of implementing adaptive control systems that can seamlessly manage traffic during signal failures.
In conclusion, LiDAR sensor technology has proven to be a powerful tool for understanding the effect of traffic signal failures on traffic volume, congestion, and safety at signalized intersections. This research not only provides a comprehensive analysis of the challenges posed by signal malfunctions but also offers statistical analysis to enhance urban transportation system resilience. By leveraging the insights gained from this study, city planners, traffic engineers, and policymakers can make informed decisions to improve intersection safety, reduce congestion, and minimize delays when traffic signals stop working unexpectedly. Ultimately, this research contributes to the overarching goal of creating more efficient, reliable, and safe urban transportation networks that can better withstand disruptions, ensuring the continued mobility and well-being of urban populations.
The future of studying the effect of traffic signal management during signal failures using LiDAR sensor technology holds tremendous promise for revolutionizing urban transportation. By addressing the following research areas, future studies can contribute to safer, more efficient, and resilient traffic systems, ultimately improving the quality of life for urban populations and reducing the societal and economic impact of signal failures. These advancements will play a crucial role in shaping the future of transportation in smart cities [21,22,23].
- Integration of LiDAR with Autonomous Vehicles: Future studies should explore how LiDAR sensor technology can be seamlessly integrated with autonomous vehicles to enhance safety and traffic management during signal failures. Investigate how self-driving cars can communicate with signalized intersections and adapt their behavior in real-time, potentially reducing congestion and delays.
- Machine Learning for Predictive Analytics: Utilize machine learning algorithms to predict the likelihood of traffic signal failures based on historical data, weather conditions, and intersection-specific factors. This proactive approach can help authorities implement preventive measures and deploy resources more effectively.
- Dynamic Signal Control Optimization: Develop advanced traffic signal control algorithms that can dynamically adapt to signal failures by analyzing real-time LiDAR data. Investigate how these adaptive control systems can optimize signal timings, reduce congestion, and enhance intersection efficiency.
- Pedestrian and Cyclist Safety: Extend LiDAR sensor technology's application to study pedestrian and cyclist behavior and safety during signal failures. Analyze how LiDAR-equipped vehicles and infrastructure can improve crosswalk safety and reduce conflicts.
- Human-Machine Interaction: Explore the human-machine interaction aspects of LiDAR-equipped vehicles and traffic signal systems. Investigate how drivers, pedestrians, and cyclists perceive and respond to LiDAR-based safety features and signal control strategies during signal failures.
- Real-world Pilot Implementations: Conduct real-world pilot implementations of LiDAR-based traffic signal management systems in select urban areas. Evaluate their effectiveness in reducing congestion, minimizing delays, and enhancing safety during signal failures.
- Scalability and Cost-effectiveness: Assess the scalability and cost-effectiveness of deploying LiDAR technology at signalized intersections. Investigate how advancements in sensor technology can make it more accessible for widespread adoption by municipalities of varying sizes.
- Resilience Testing: Conduct resilience testing of LiDAR-based signal systems by simulating various failure scenarios, including power outages, equipment malfunctions, and cyberattacks. Evaluate the robustness of these systems in ensuring uninterrupted traffic flow.
- Public Awareness and Education: Explore strategies to raise public awareness and educate drivers, pedestrians, and cyclists about LiDAR-equipped traffic signal systems. Analyze how informed road users contribute to safer and more efficient intersection operations during signal failures.
- Environmental Impact Assessment: Study the environmental impact of LiDAR technology, considering factors such as energy consumption, materials used, and recyclability. Evaluate its overall sustainability compared to traditional signal control systems.
- Regulatory and Legal Frameworks: Examine the development of regulatory and legal frameworks for LiDAR-equipped traffic signal systems, addressing issues such as data privacy, liability, and standardization.
References
- Rahman, M.S.; Abdel-Aty, M.; Hasan, S.; Cai, Q. Applying machine learning approaches to analyze the vulnerable road-users' crashes at statewide traffic analysis zones. Journal of safety research 2019, 70, 275–288. [Google Scholar] [CrossRef] [PubMed]
- Ansariyar, A. (2022). "Investigating the Car-Pedestrian Conflicts Based on an Innovative Post Encroachment Time Threshold (PET) Classification." Available at SSRN 4377745, Available at SSRN: https://ssrn.com/abstract=4377745. [CrossRef]
- Ansariyar, A.; Taherpour, A. Statistical analysis of vehicle-vehicle conflicts with a LIDAR sensor in a signalized intersection. Advances in Transportation Studies 2023, 60. [Google Scholar]
- Arun, A.; Haque, M.M.; Bhaskar, A.; Washington, S.; Sayed, T. A systematic mapping review of surrogate safety assessment using traffic conflict techniques. Accident Analysis & Prevention 2021, 153, 106016. [Google Scholar]
- Ansariyar, A.; Jeihani, M. Statistical Analysis of Jaywalking Conflicts By a LiDAR Sensor. Scientific Journal of Silesian University of Technology. Series Transport 2023, 120, 17–36. [Google Scholar]
- Astarita, V.; et al. Surrogate safety measures from traffic simulation models a comparison of different models for intersection safety evaluation. Transportation research procedia 2019, 37, 219–226. [Google Scholar] [CrossRef]
- Ansariyar, A.; & Jeihani, M. (2023, June). Investigating the Vehicle-Bicyclists Conflicts using LIDAR sensor technology at signalized intersections. In ICTTE 2023: International Conference on Transportation and Traffic Engineering https://publications. waset. org/abstracts/166804/investigating-the-vehicle-bicyclists-conflicts-using-lidar-sensor-technology-at-signalized-intersections, Available at SSRN: https://ssrn.com/abstract=4473399. [CrossRef]
- Soo, H.Y.; Teodorovic, D.; Collura, J. A DSS framework for advanced traffic signal control system investment planning. Journal of Public Transportation 2006, 9, 87–106. [Google Scholar] [CrossRef]
- Ansariyar, A.; Ardeshiri, A.; Vaziri, E.; & Jeihani, M. (2022). Investigating the Traffic Behavior of Bicyclists in Interaction with Car Users on Shared Bike Lanes Without Physical Barriers. In Transportation Research Board 102nd Annual Meeting Location: Washington DC, United States, Available at SSRN: https://ssrn.com/abstract=4377734. [CrossRef]
- Stylianou, K.; Dimitriou, L. Analysis of rear-end conflicts in urban networks using Bayesian networks. Transportation research record 2018, 2672, 302–312. [Google Scholar] [CrossRef]
- Ansariyar, A.; Taherpour, A. Investigating the accuracy rate of vehicle-vehicle conflicts by LIDAR technology and microsimulation in VISSIM and AIMSUN. Advances in Transportation Studies 2023, 61. [Google Scholar]
- Sun, Y.; Xu, H.; Wu, J.; Hajj, E.Y.; Geng, X. Data processing framework for development of driving cycles with data from SHRP 2 naturalistic driving study. Transportation Research Record 2017, 2645, 50–56. [Google Scholar] [CrossRef]
- Suzuki, K.; Ito, H. Empirical analysis on risky behaviors and pedestrian-vehicle conflicts at large-size signalized intersections. Transportation research procedia 2017, 25, 2139–2152. [Google Scholar] [CrossRef]
- Ansariyar, A.; Ardeshiri, A.; Jeihani, M. Investigating the collected vehicle-pedestrian conflicts by a LIDAR sensor based on a new Post Encroachment Time Threshold (PET) classification at signalized intersections. Advances in Transportation Studies 2023, 61, 103–118. [Google Scholar]
- Suzuki, S.; P. Raksincharoensak, I. Shimizu, M. Nagai and R. Adomat (2010). Sensor fusion-based pedestrian collision warning system with crosswalk detection. 2010 IEEE Intelligent Vehicles Symposium, IEEE.
- Thakur, R. Scanning LIDAR in Advanced Driver Assistance Systems and Beyond: Building a road map for next-generation LIDAR technology. IEEE Consumer Electronics Magazine 2016, 5, 48–54. [Google Scholar] [CrossRef]
- Uzondu, C.; S. Jamson and F. Lai Exploratory study involving observation of traffic behaviour and conflicts in Nigeria using the Traffic Conflict Technique. Safety science 2018, 110, 273–284. [Google Scholar] [CrossRef]
- Van der Horst, A.R. A. (1991). "A time-based analysis of road user behaviour in normal and crucial encounters.".
- Vanlaar, W.; Hing, M.M.; Brown, S.; McAteer, H.; Crain, J.; McFaull, S. Fatal and serious injuries related to vulnerable road users in Canada. Journal of safety research 2016, 58, 67–77. [Google Scholar] [CrossRef] [PubMed]
- Vasconcelos, L.; Neto, L.; Seco, Á.M.; Silva, A.B. Validation of the surrogate safety assessment model for assessment of intersection safety. Transportation Research Record 2014, 2432, 1–9. [Google Scholar] [CrossRef]
- Vogel, K. A comparison of headway and time to collision as safety indicators. Accident analysis & prevention 2003, 35, 427–433. [Google Scholar]
- Wang, D.Z.; I. Posner and P. Newman (2012). What could move? finding cars, pedestrians and bicyclists in 3d laser data. 2012 IEEE International Conference on Robotics and Automation, IEEE.
- Wang, Y.; Yang, X.; Liang, H.; Liu, Y. A review of the self-adaptive traffic signal control system based on future traffic environment. Journal of Advanced Transportation 2018, 2018. [Google Scholar] [CrossRef]
Figure 1.
E Cold Spring Ln – Hillen Rd Intersection.
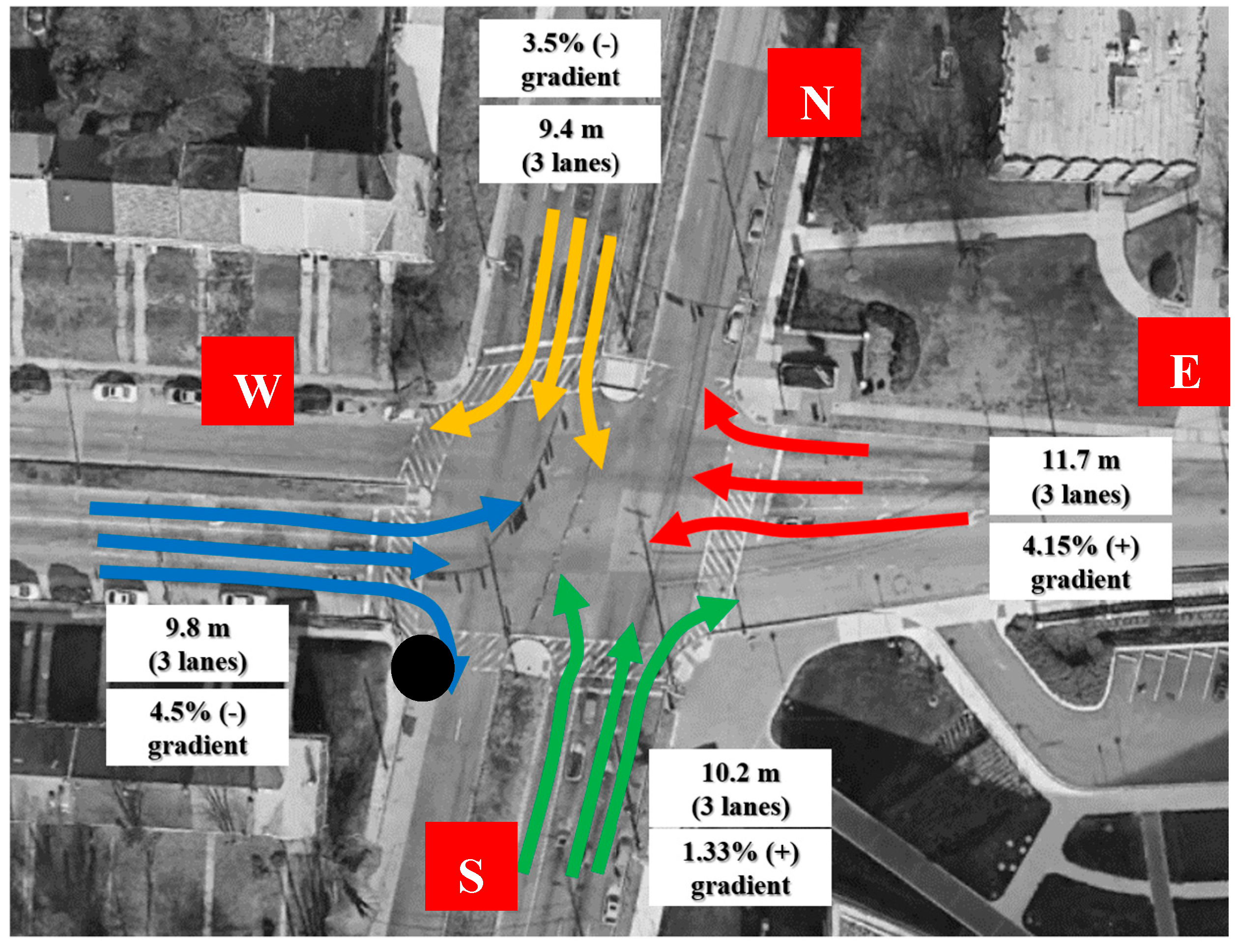
Figure 2.
Frequency of Vehicle-Vehicle Conflicts.
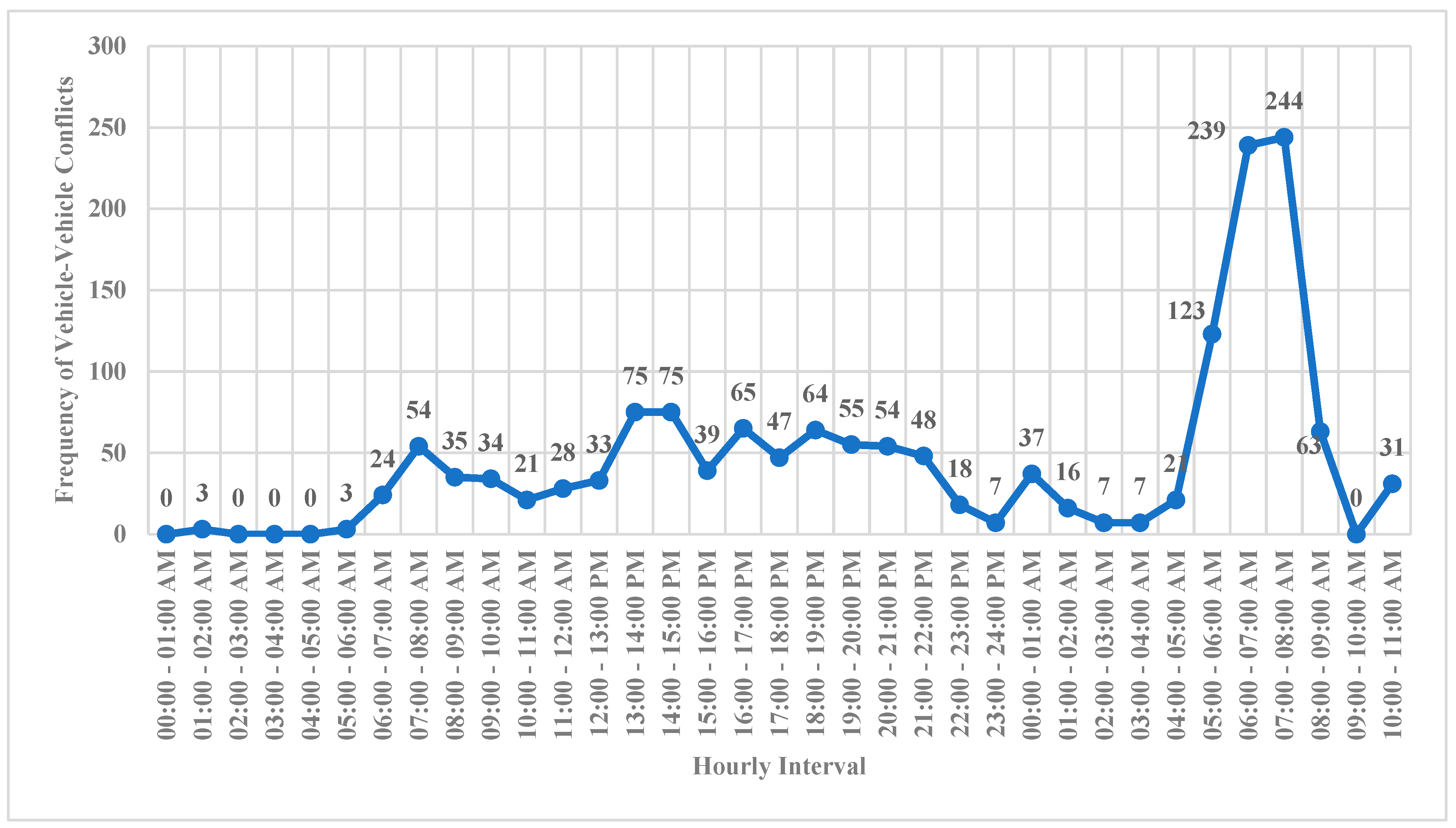
Figure 3.
Severity of Vehicle-Vehicle Conflicts.
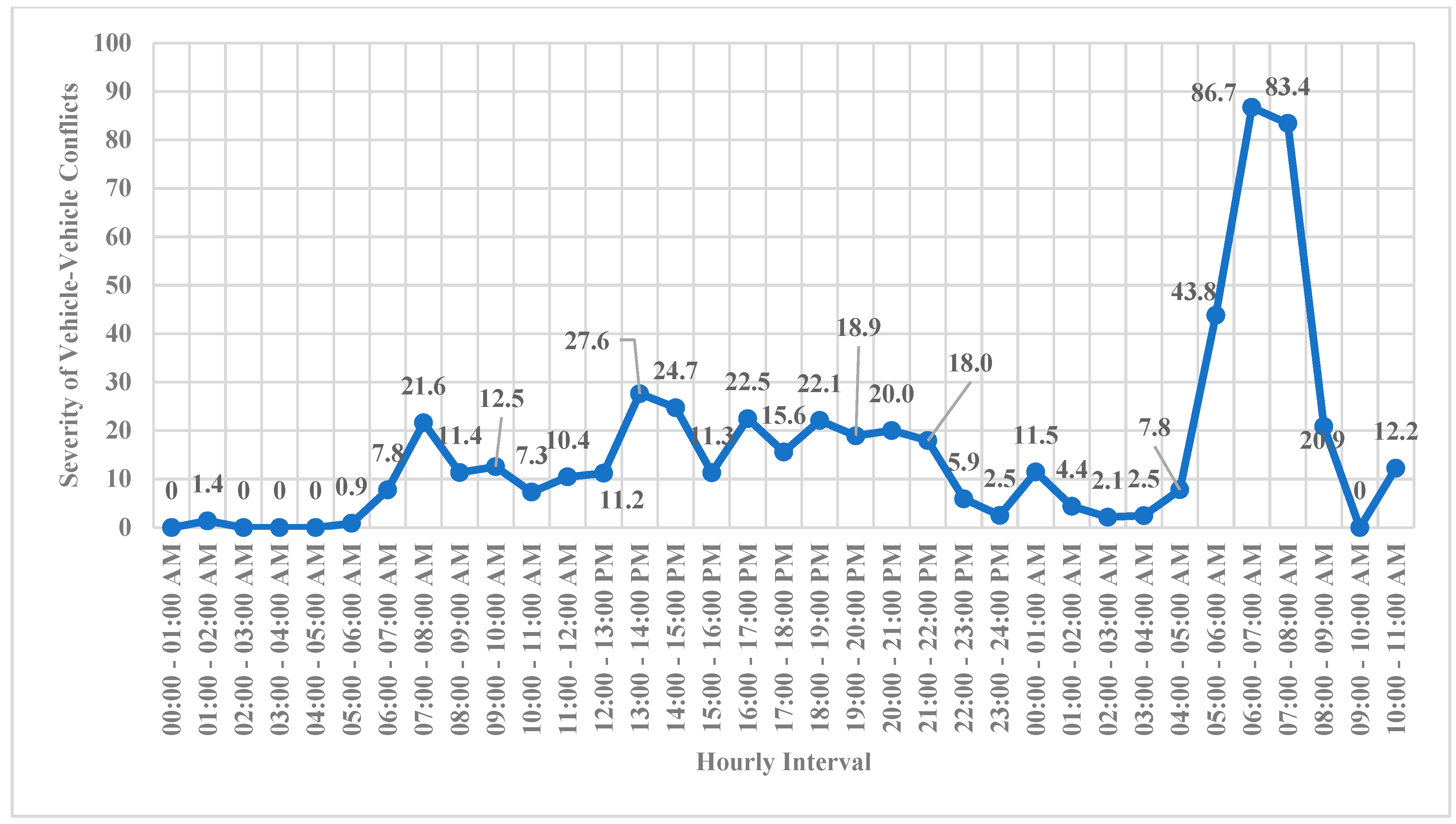
Figure 4.
Frequency of Vehicle-Pedestrian Conflicts.
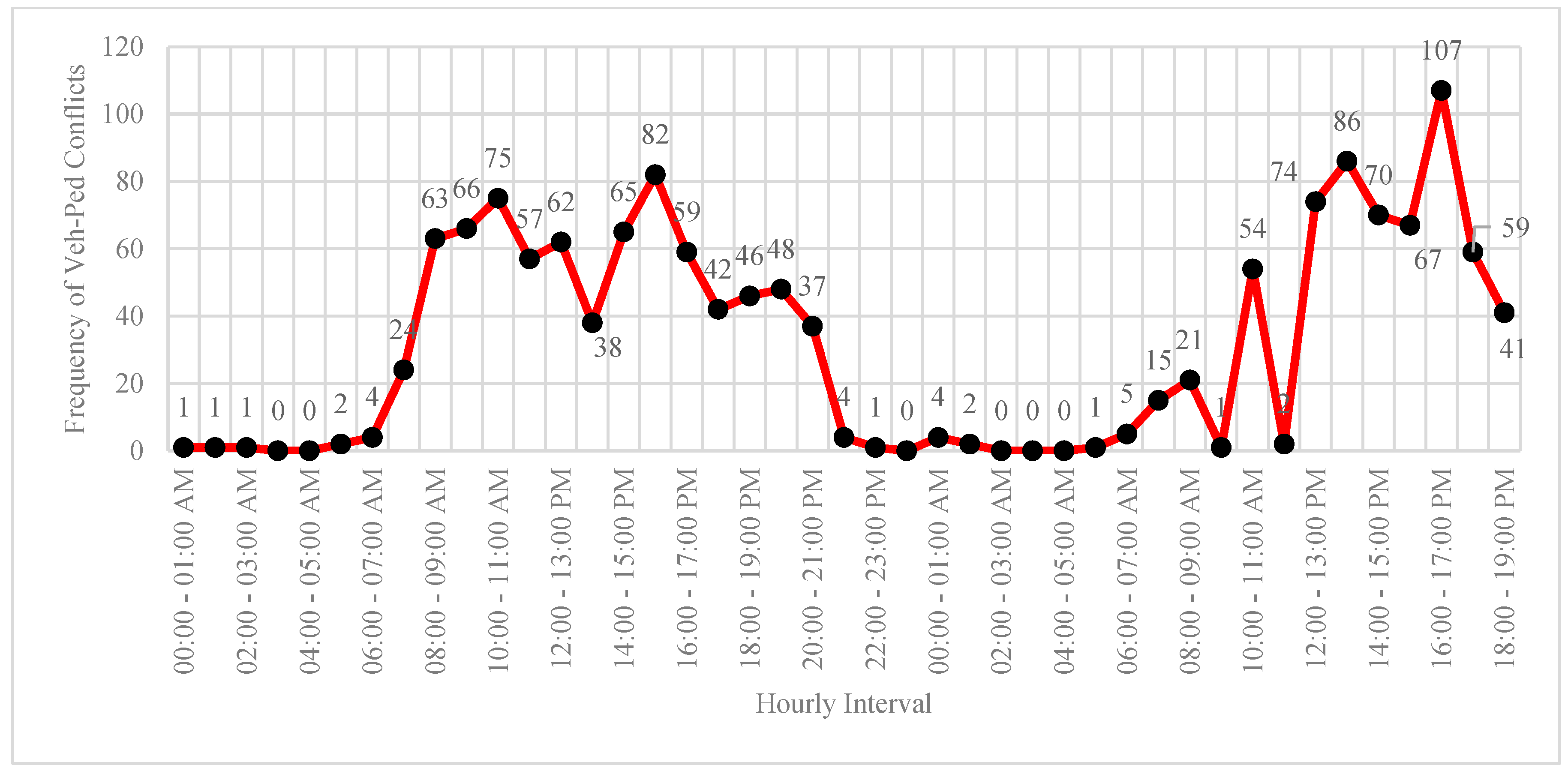
Figure 5.
Severity of Vehicle-Pedestrian Conflicts.
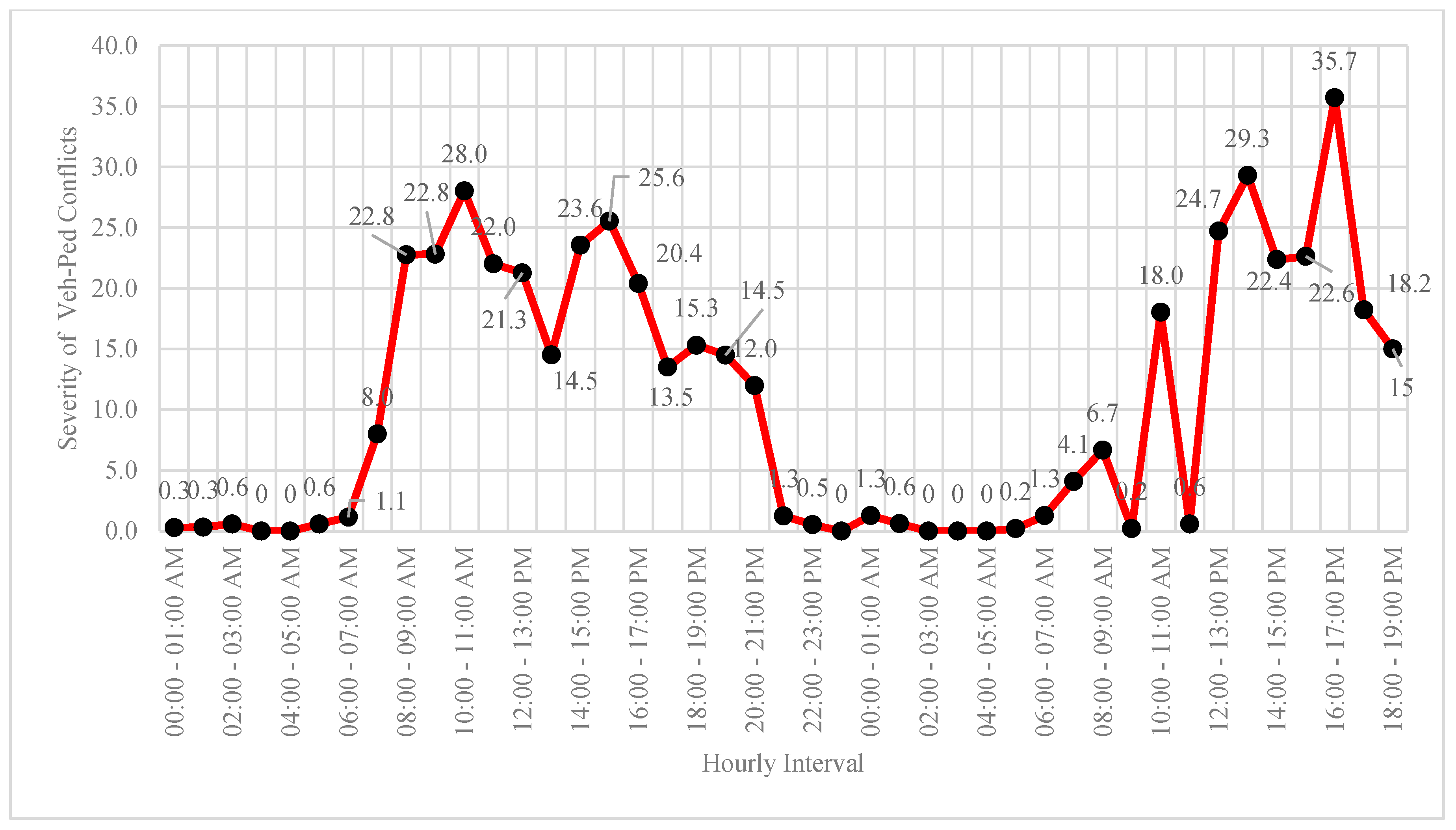
Figure 6.
Jaywalking Events Analysis.
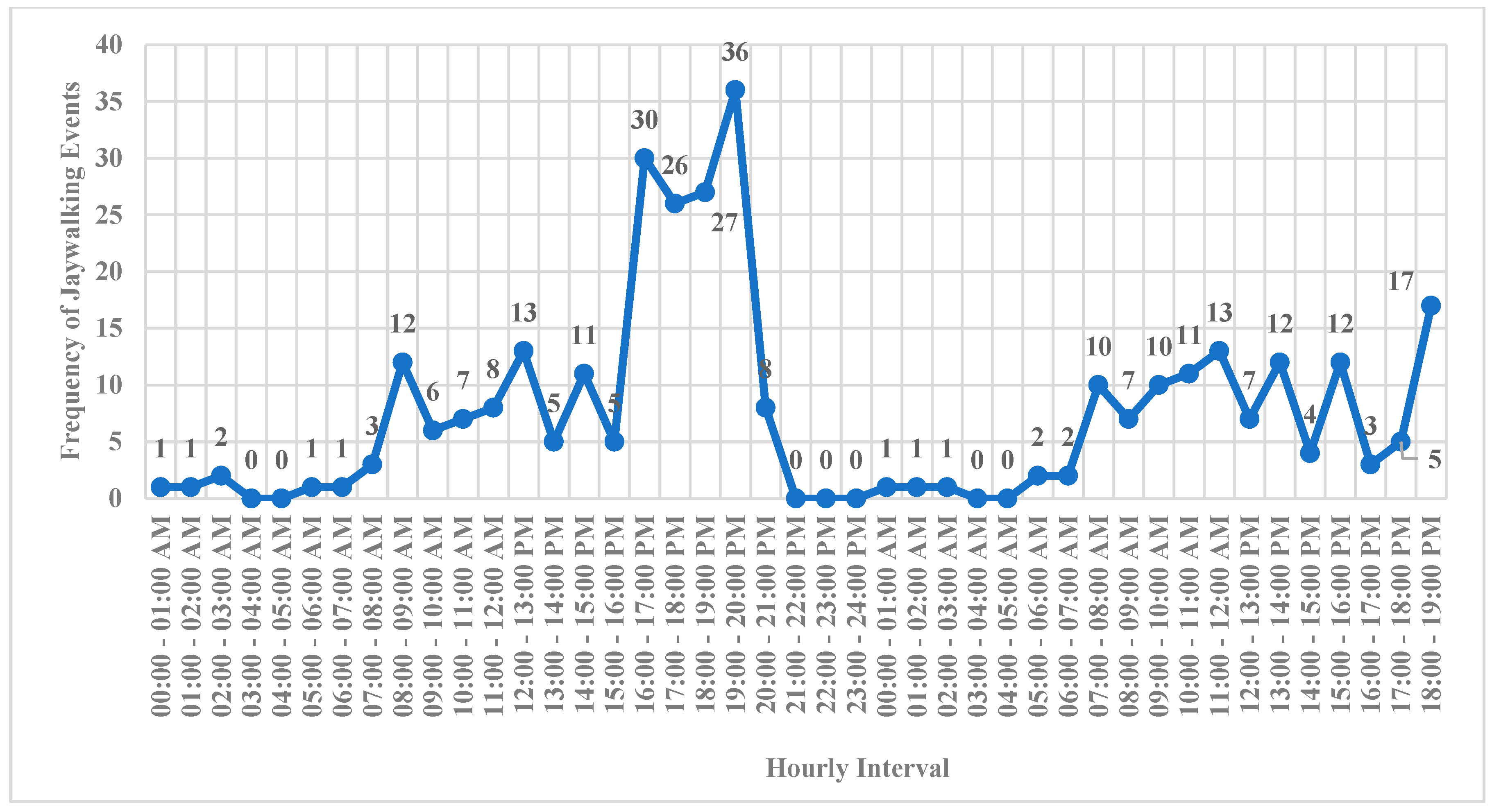
Figure 7.
Vehicle Counts Changes.
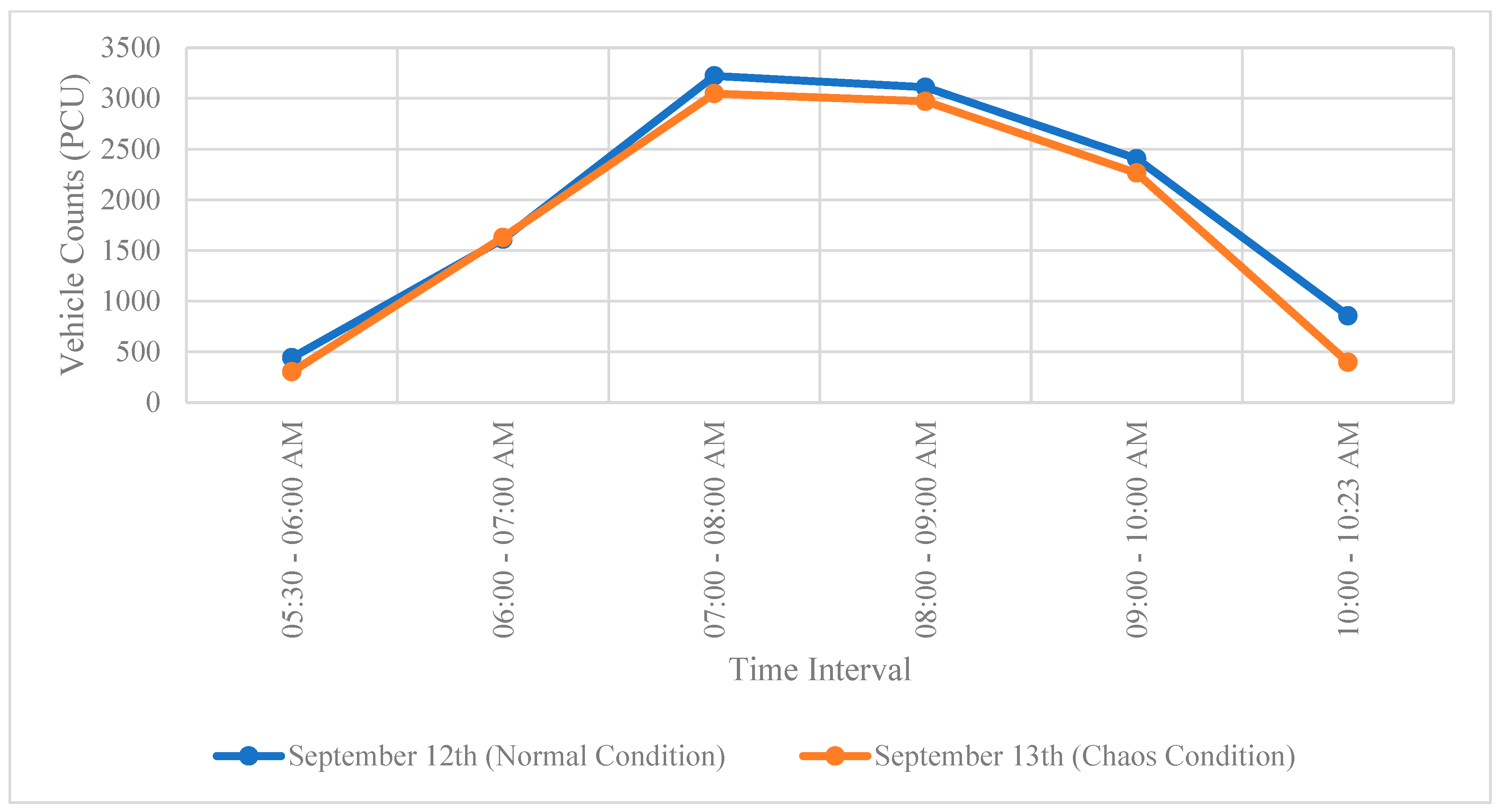
Figure 8.
Pedestrian Counts Changes.
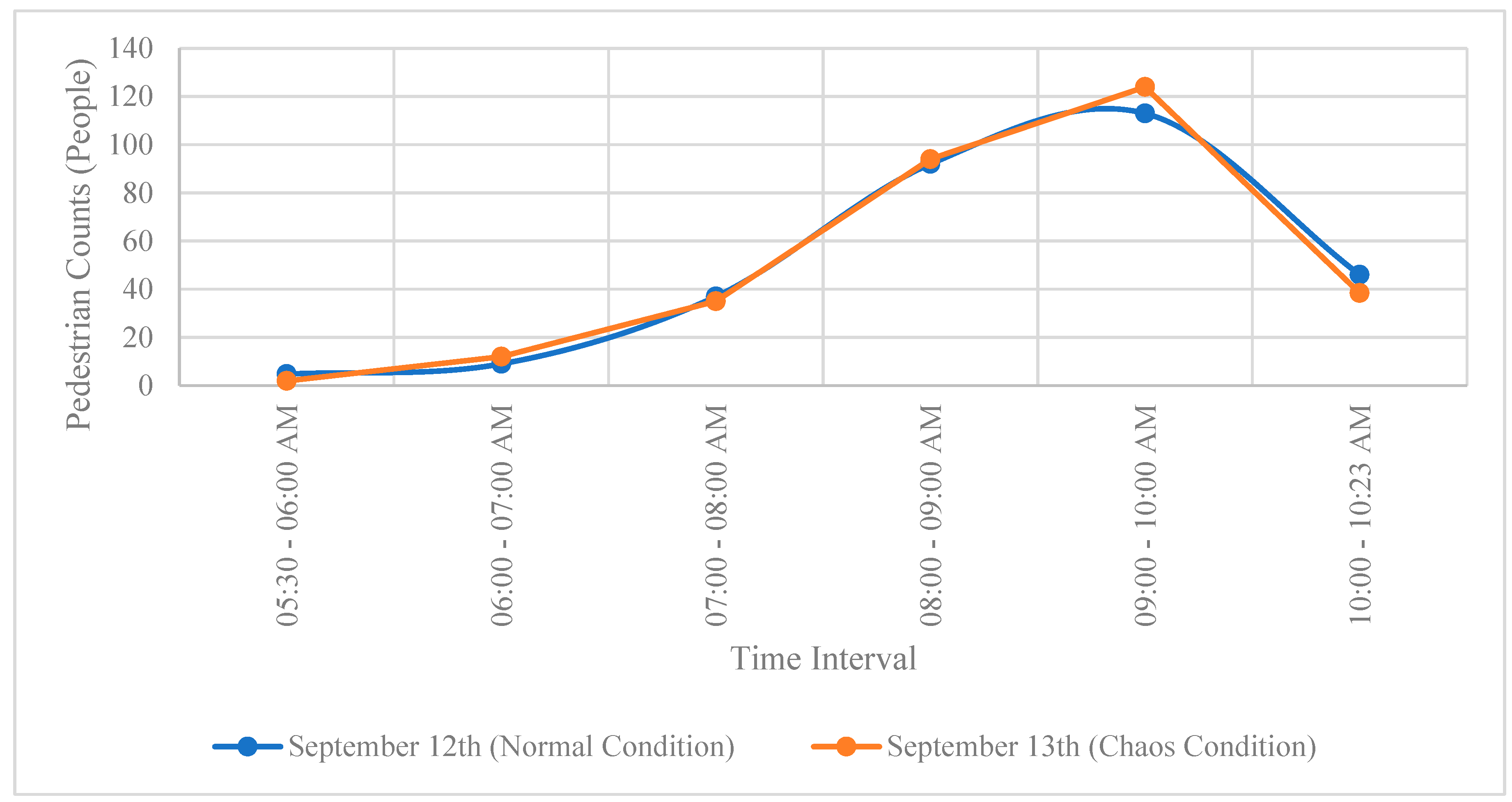
Figure 9.
Frequency of Vehicle-Vehicle Conflicts Changes.
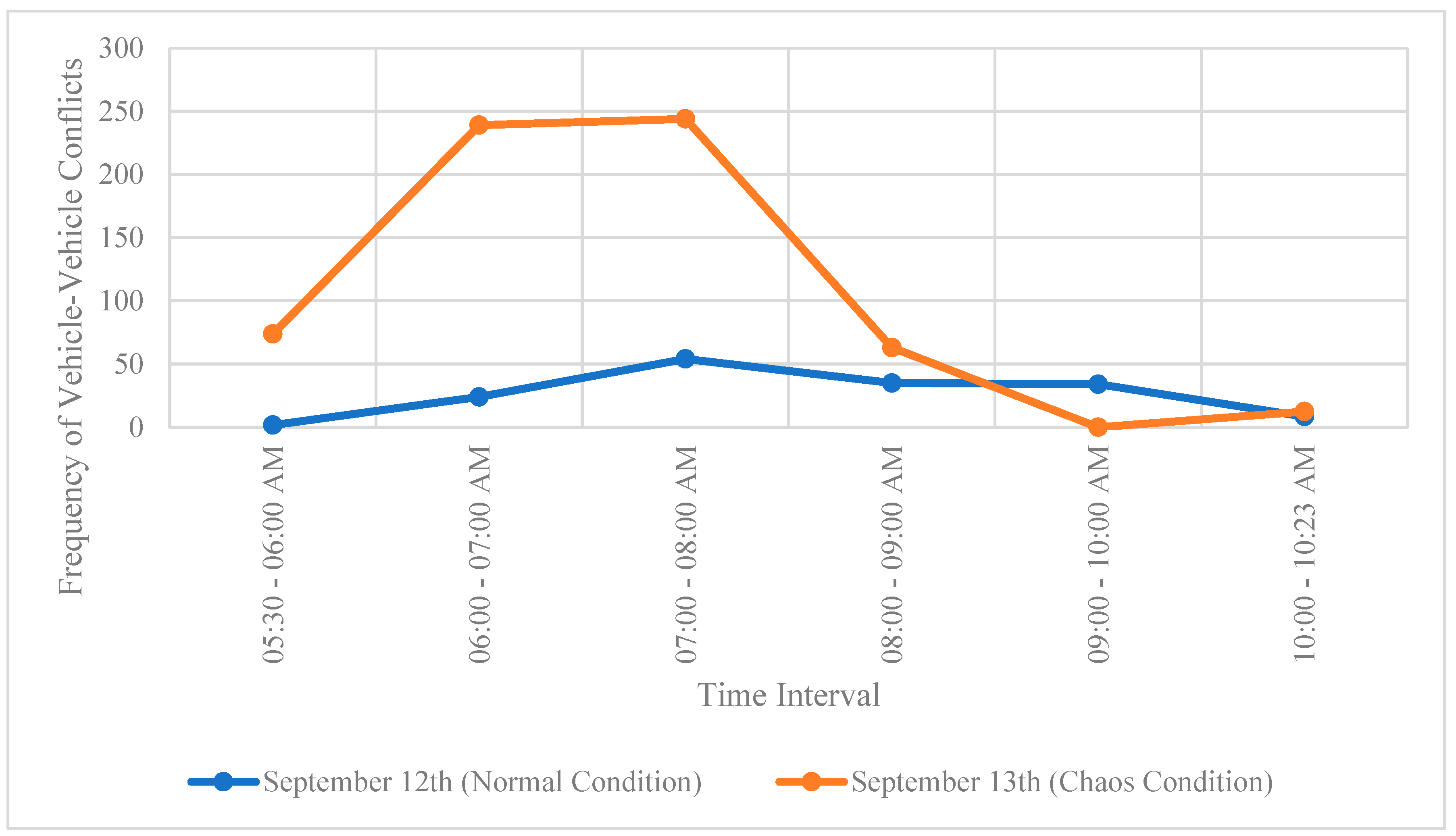
Figure 10.
Severity of Vehicle-Vehicle Conflicts Changes.
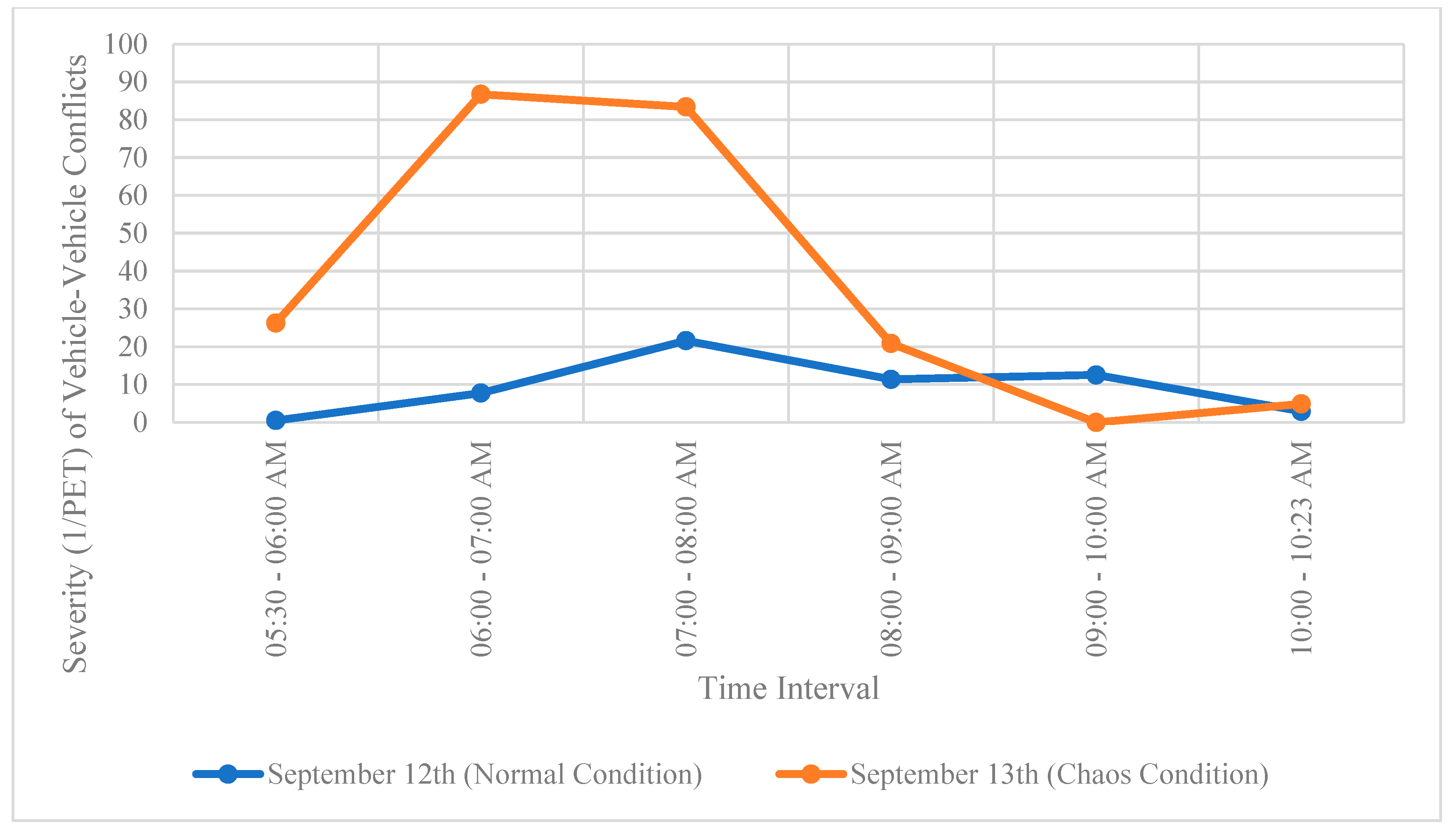
Figure 11.
Frequency and Severity of Vehicle-Vehicle Conflicts in Normal Condition (September 12th - left figure) and Chaos Condition (September 13th - right figure).
Figure 11.
Frequency and Severity of Vehicle-Vehicle Conflicts in Normal Condition (September 12th - left figure) and Chaos Condition (September 13th - right figure).

Figure 12.
Frequency of Vehicle-Pedestrian Conflicts Changes.
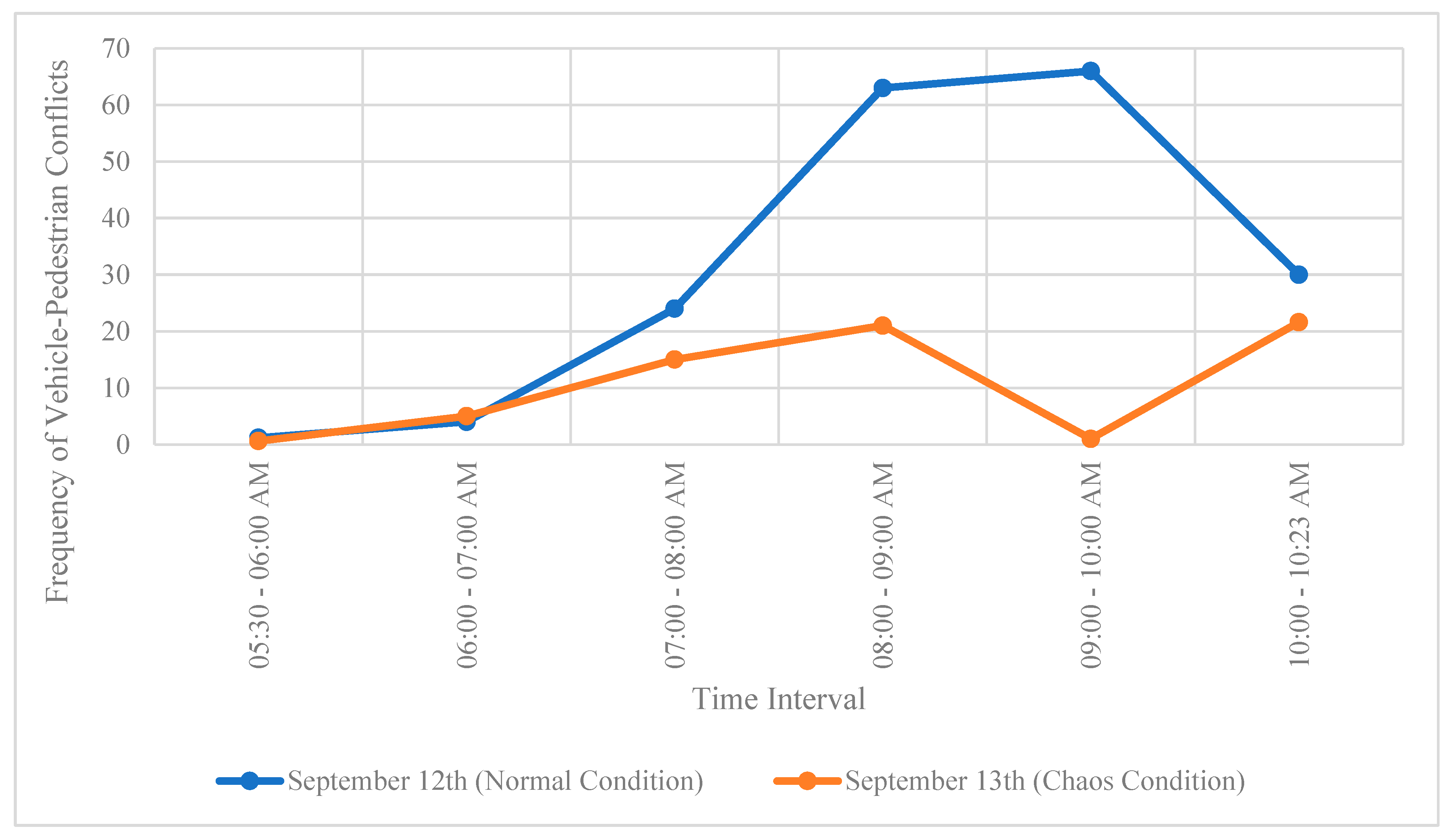
Figure 13.
Severity of Vehicle-Pedestrian Conflicts Changes.
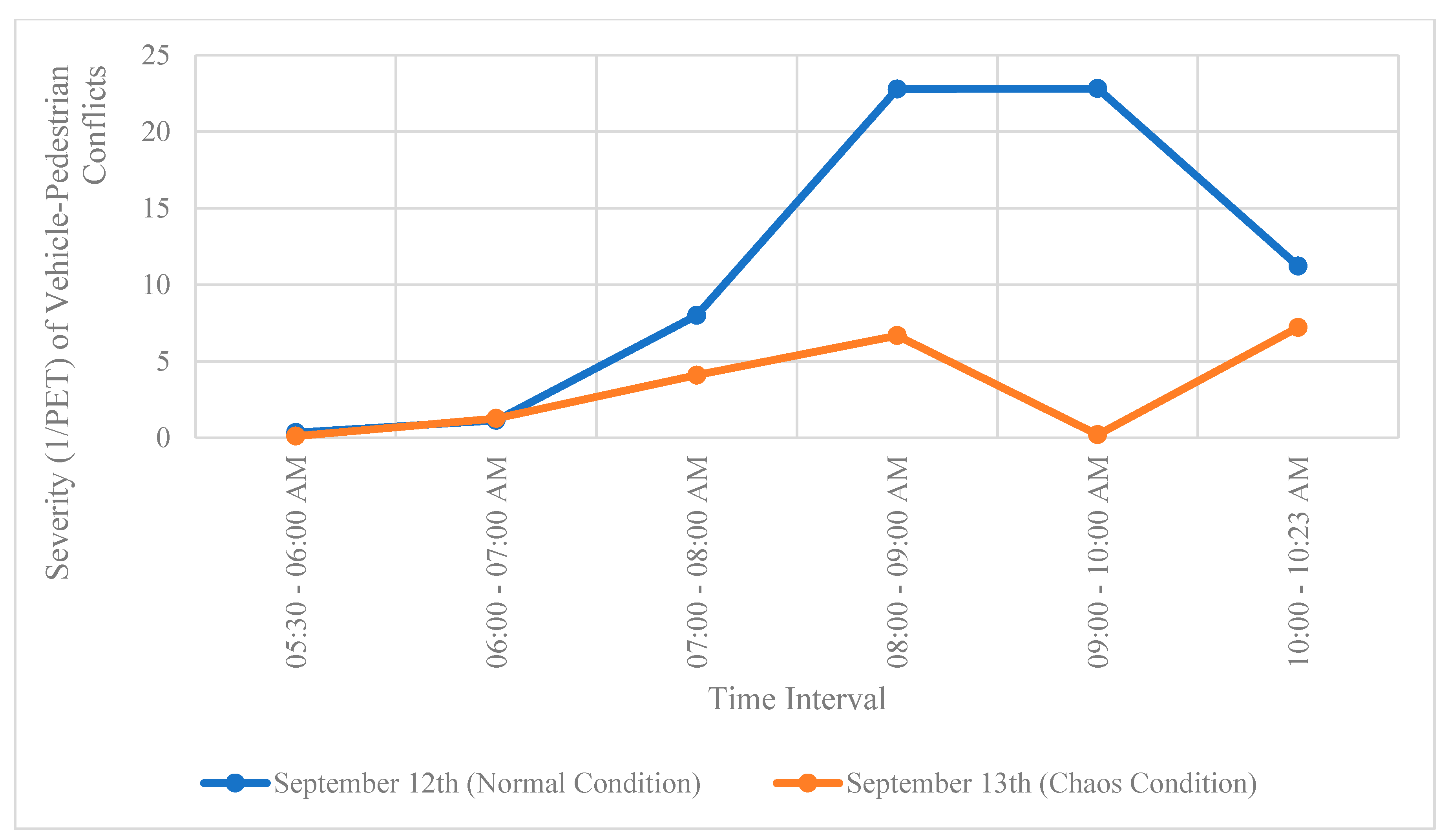
Figure 14.
Frequency and Severity of Vehicle-Pedestrian Conflicts in Normal Condition (September 12th - left figure) and Chaos Condition (September 13th - right figure).
Figure 14.
Frequency and Severity of Vehicle-Pedestrian Conflicts in Normal Condition (September 12th - left figure) and Chaos Condition (September 13th - right figure).

Figure 15.
Frequency of Jaywalking Events Changes.
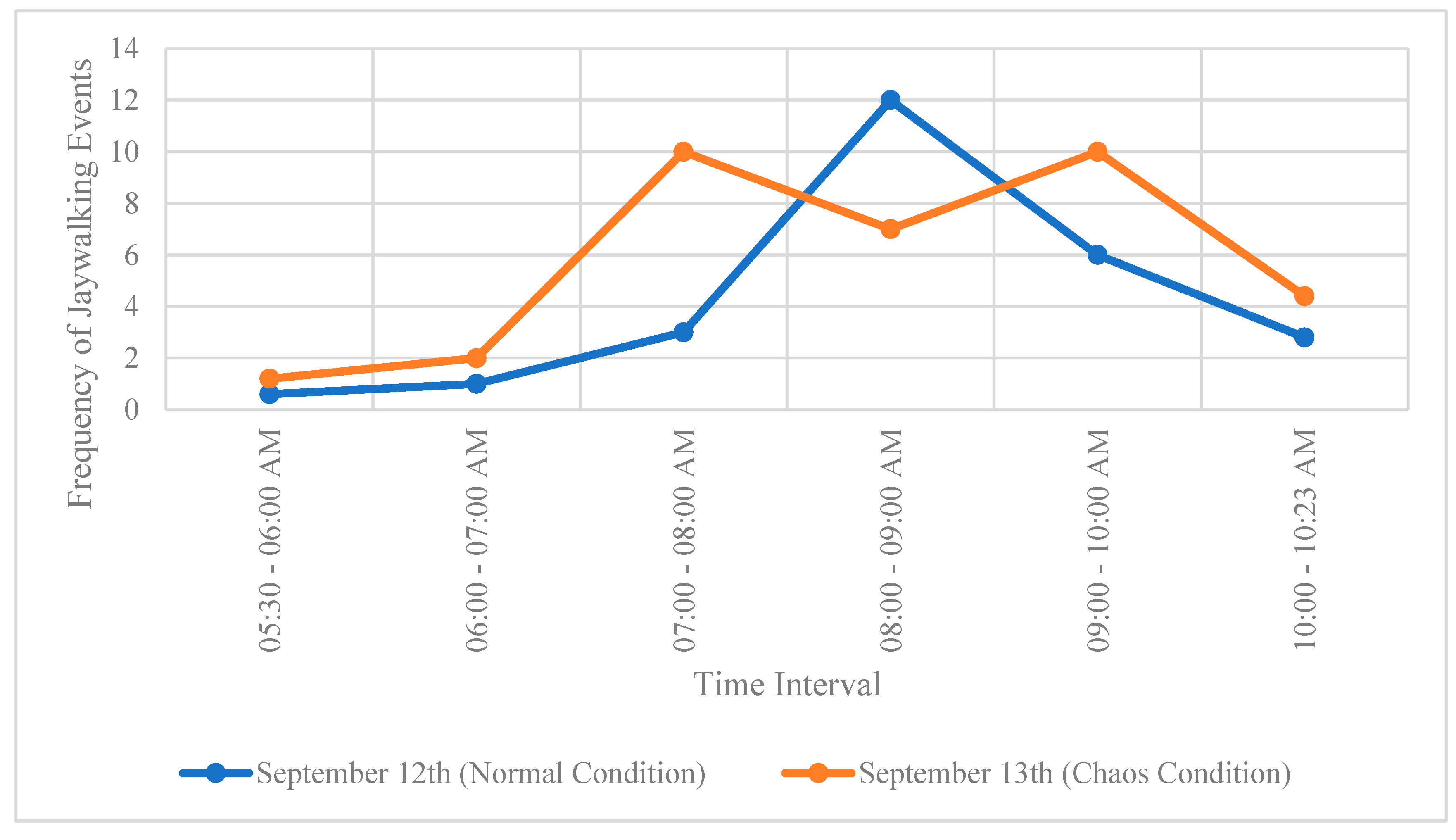
Figure 16.
Frequency (left figure) and trajectory (right figure) of jaywalking events on September 12th (normal condition).
Figure 16.
Frequency (left figure) and trajectory (right figure) of jaywalking events on September 12th (normal condition).
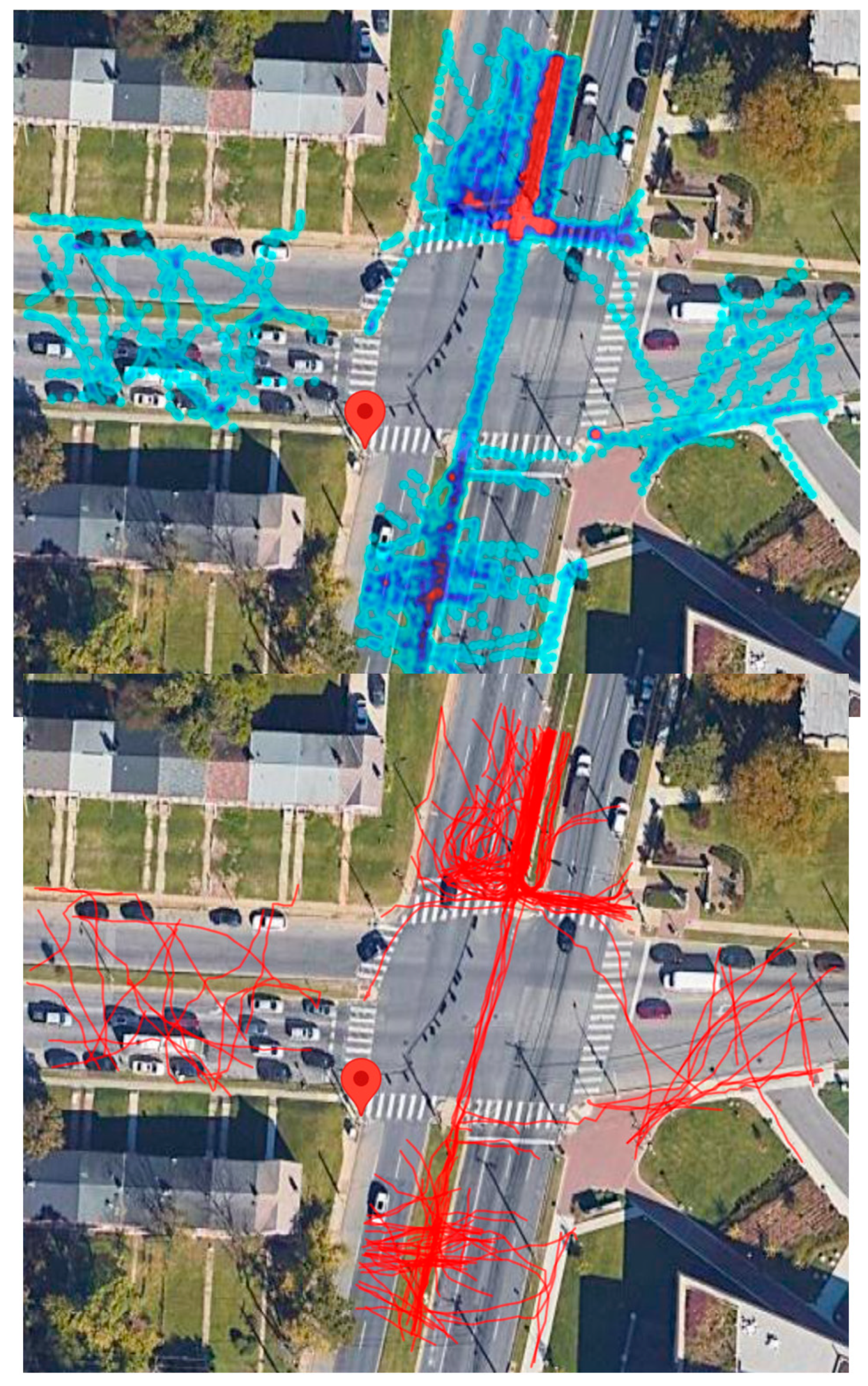
Figure 17.
Frequency (left figure) and trajectory (right figure) of jaywalking events on September 13th (chaos condition).
Figure 17.
Frequency (left figure) and trajectory (right figure) of jaywalking events on September 13th (chaos condition).
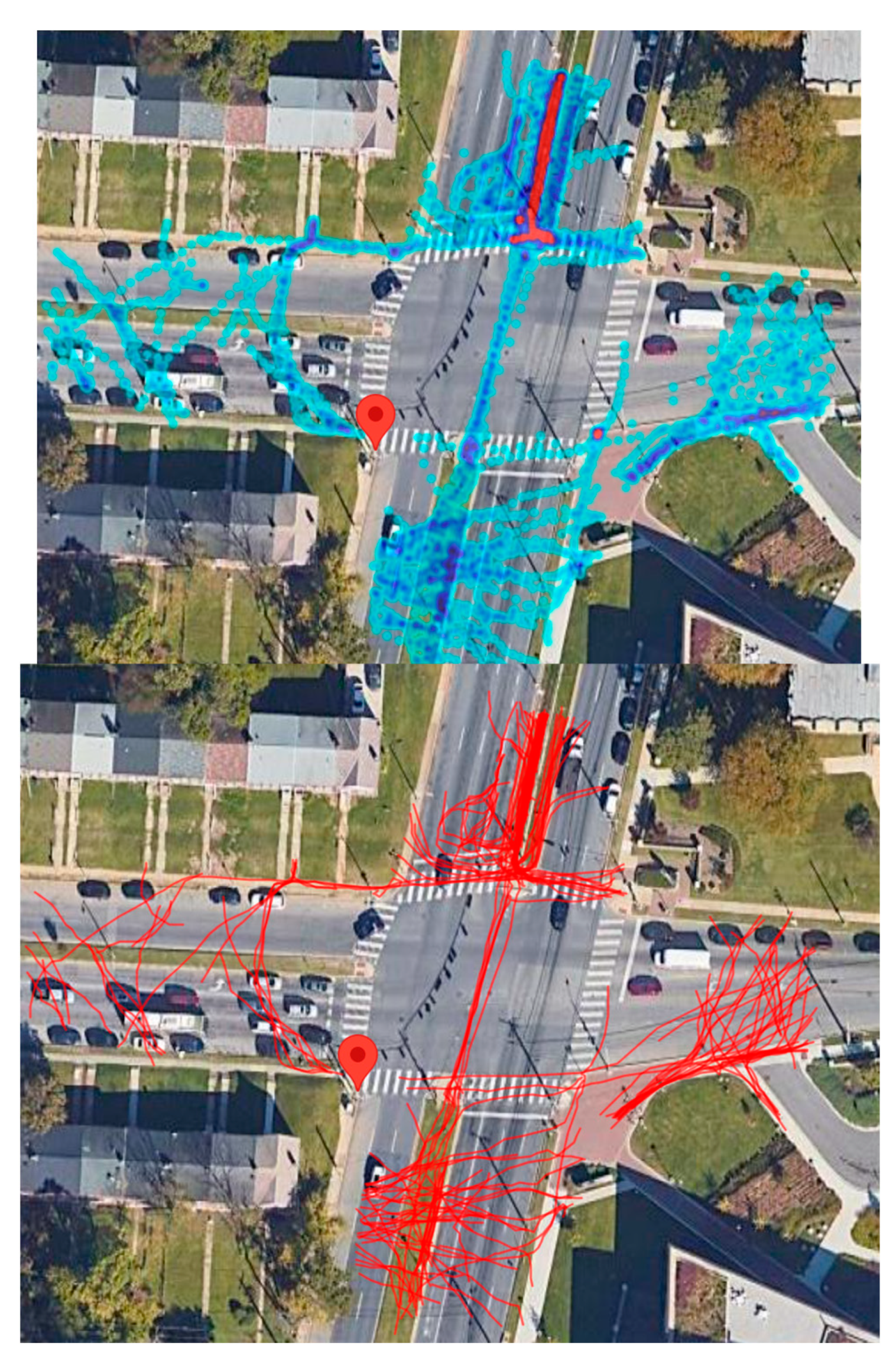

Table 1.
Vehicle Counts Collected Data by The LiDAR Sensor.
| Date | Hour | NE | NS | NW | ES | EW | EN | SW | SN | SE | WN | WE | WS | SUM |
| September 12th | 00:00 - 01:00 AM | 16 | 101 | 43 | 13 | 54 | 21 | 13 | 141 | 5 | 28 | 47 | 1 | 483 |
| 01:00 - 02:00 AM | 9 | 60 | 19 | 6 | 35 | 14 | 3 | 68 | 3 | 21 | 37 | 0 | 275 | |
| 02:00 - 03:00 AM | 6 | 46 | 8 | 3 | 19 | 10 | 3 | 50 | 4 | 13 | 15 | 0 | 177 | |
| 03:00 - 04:00 AM | 6 | 59 | 6 | 2 | 18 | 1 | 2 | 53 | 1 | 7 | 14 | 2 | 171 | |
| 04:00 - 05:00 AM | 11 | 114 | 19 | 3 | 22 | 11 | 1 | 61 | 2 | 12 | 26 | 0 | 282 | |
| 05:00 - 06:00 AM | 50 | 346 | 34 | 18 | 70 | 24 | 6 | 82 | 4 | 31 | 73 | 0 | 738 | |
| 06:00 - 07:00 AM | 71 | 726 | 113 | 43 | 150 | 69 | 13 | 219 | 18 | 59 | 127 | 3 | 1611 | |
| 07:00 - 08:00 AM | 61 | 1159 | 189 | 114 | 484 | 143 | 37 | 508 | 53 | 153 | 320 | 0 | 3221 | |
| 08:00 - 09:00 AM | 120 | 995 | 188 | 93 | 393 | 161 | 40 | 563 | 65 | 171 | 316 | 4 | 3109 | |
| 09:00 - 10:00 AM | 110 | 606 | 139 | 80 | 315 | 152 | 34 | 476 | 71 | 162 | 257 | 4 | 2406 | |
| 10:00 - 11:00 AM | 109 | 537 | 142 | 66 | 223 | 126 | 29 | 486 | 64 | 141 | 211 | 4 | 2138 | |
| 11:00 - 12:00 AM | 131 | 561 | 102 | 75 | 192 | 116 | 40 | 479 | 70 | 141 | 228 | 6 | 2141 | |
| 12:00 - 13:00 PM | 129 | 574 | 116 | 80 | 223 | 144 | 36 | 536 | 100 | 182 | 261 | 7 | 2388 | |
| 13:00 - 14:00 PM | 125 | 593 | 142 | 62 | 214 | 158 | 38 | 575 | 64 | 130 | 240 | 14 | 2355 | |
| 14:00 - 15:00 PM | 121 | 718 | 136 | 75 | 346 | 155 | 59 | 718 | 74 | 198 | 273 | 16 | 2889 | |
| 15:00 - 16:00 PM | 126 | 654 | 168 | 62 | 306 | 191 | 64 | 925 | 81 | 245 | 414 | 2 | 3238 | |
| 16:00 - 17:00 PM | 119 | 663 | 173 | 68 | 309 | 180 | 59 | 1130 | 94 | 286 | 438 | 4 | 3523 | |
| 17:00 - 18:00 PM | 122 | 661 | 191 | 65 | 348 | 199 | 59 | 1106 | 80 | 258 | 456 | 3 | 3548 | |
| 18:00 - 19:00 PM | 77 | 597 | 162 | 72 | 313 | 152 | 48 | 795 | 55 | 217 | 385 | 1 | 2874 | |
| 19:00 - 20:00 PM | 117 | 487 | 167 | 44 | 218 | 116 | 42 | 629 | 15 | 157 | 251 | 2 | 2245 | |
| 20:00 - 21:00 PM | 88 | 412 | 142 | 47 | 210 | 104 | 40 | 501 | 12 | 149 | 220 | 1 | 1926 | |
| 21:00 - 22:00 PM | 65 | 300 | 93 | 38 | 163 | 79 | 29 | 373 | 10 | 113 | 151 | 2 | 1416 | |
| 22:00 - 23:00 PM | 40 | 239 | 64 | 19 | 87 | 52 | 8 | 216 | 22 | 48 | 91 | 2 | 888 | |
| 23:00 - 24:00 PM | 21 | 102 | 38 | 4 | 24 | 35 | 10 | 119 | 11 | 30 | 66 | 2 | 462 | |
| September 13th | 00:00 - 01:00 AM | 22 | 59 | 20 | 8 | 43 | 31 | 6 | 82 | 9 | 55 | 63 | 1 | 399 |
| 01:00 - 02:00 AM | 13 | 36 | 10 | 7 | 34 | 20 | 3 | 72 | 5 | 22 | 32 | 0 | 254 | |
| 02:00 - 03:00 AM | 7 | 52 | 9 | 3 | 16 | 5 | 1 | 40 | 2 | 11 | 16 | 0 | 162 | |
| 03:00 - 04:00 AM | 8 | 67 | 3 | 3 | 18 | 7 | 4 | 45 | 4 | 18 | 22 | 0 | 199 | |
| 04:00 - 05:00 AM | 9 | 119 | 25 | 12 | 32 | 9 | 0 | 47 | 1 | 17 | 28 | 0 | 299 | |
| 04:00 - 05:30 AM | 19 | 219 | 20 | 11 | 43 | 12 | 3 | 62 | 3 | 26 | 38 | 0 | 457 | |
| 05:30 - 06:00 AM | 12 | 146 | 13 | 8 | 29 | 8 | 2 | 42 | 2 | 18 | 25 | 0 | 304 | |
| 06:00 - 07:00 AM | 75 | 720 | 83 | 42 | 177 | 67 | 16 | 213 | 19 | 75 | 135 | 7 | 1629 | |
| 07:00 - 08:00 AM | 76 | 1129 | 214 | 101 | 412 | 166 | 25 | 498 | 34 | 118 | 271 | 4 | 3048 | |
| 08:00 - 09:00 AM | 114 | 991 | 213 | 109 | 309 | 165 | 30 | 516 | 83 | 147 | 286 | 8 | 2971 | |
| 09:00 - 10:00 AM | 113 | 655 | 170 | 67 | 209 | 114 | 29 | 471 | 46 | 167 | 222 | 1 | 2264 | |
| 10:00 - 10:23 AM | 30 | 100 | 19 | 20 | 36 | 22 | 6 | 92 | 17 | 29 | 23 | 2 | 396 | |
| 10:23 - 11:00 AM | 44 | 150 | 28 | 31 | 55 | 34 | 8 | 137 | 26 | 44 | 35 | 3 | 595 |
Table 2.
Pedestrian Counts Collected Data by The LiDAR Sensor.
| Date | Hour | N | E | S | W | SUM |
| September 12th | 00:00 - 01:00 AM | 5 | 2 | 0 | 1 | 8 |
| 01:00 - 02:00 AM | 3 | 2 | 1 | 0 | 6 | |
| 02:00 - 03:00 AM | 0 | 0 | 1 | 0 | 1 | |
| 03:00 - 04:00 AM | 0 | 0 | 1 | 0 | 1 | |
| 04:00 - 05:00 AM | 0 | 1 | 0 | 0 | 1 | |
| 05:00 - 06:00 AM | 0 | 3 | 2 | 3 | 8 | |
| 06:00 - 07:00 AM | 0 | 2 | 7 | 0 | 9 | |
| 07:00 - 08:00 AM | 24 | 2 | 7 | 4 | 37 | |
| 08:00 - 09:00 AM | 33 | 15 | 26 | 18 | 92 | |
| 09:00 - 10:00 AM | 56 | 18 | 25 | 14 | 113 | |
| 10:00 - 11:00 AM | 47 | 25 | 31 | 12 | 115 | |
| 11:00 - 12:00 AM | 47 | 30 | 24 | 14 | 115 | |
| 12:00 - 13:00 PM | 46 | 22 | 28 | 13 | 109 | |
| 13:00 - 14:00 PM | 45 | 22 | 29 | 16 | 112 | |
| 14:00 - 15:00 PM | 39 | 26 | 24 | 18 | 107 | |
| 15:00 - 16:00 PM | 57 | 24 | 30 | 13 | 124 | |
| 16:00 - 17:00 PM | 47 | 29 | 46 | 16 | 138 | |
| 17:00 - 18:00 PM | 40 | 26 | 29 | 17 | 112 | |
| 18:00 - 19:00 PM | 44 | 12 | 19 | 13 | 88 | |
| 19:00 - 20:00 PM | 54 | 17 | 19 | 14 | 104 | |
| 20:00 - 21:00 PM | 27 | 14 | 17 | 13 | 71 | |
| 21:00 - 22:00 PM | 7 | 8 | 6 | 1 | 22 | |
| 22:00 - 23:00 PM | 4 | 1 | 0 | 2 | 7 | |
| 23:00 - 24:00 PM | 0 | 0 | 0 | 0 | 0 | |
| September 13th | 00:00 - 01:00 AM | 2 | 2 | 2 | 1 | 7 |
| 01:00 - 02:00 AM | 3 | 3 | 0 | 0 | 6 | |
| 02:00 - 03:00 AM | 2 | 0 | 0 | 0 | 2 | |
| 03:00 - 04:00 AM | 1 | 0 | 0 | 0 | 1 | |
| 04:00 - 05:00 AM | 0 | 0 | 0 | 1 | 1 | |
| 05:00 - 05:30 AM | 0 | 0 | 2 | 1 | 3 | |
| 05:30 - 06:00 AM | 0 | 0 | 1 | 1 | 2 | |
| 06:00 - 07:00 AM | 2 | 1 | 6 | 3 | 12 | |
| 07:00 - 08:00 AM | 15 | 7 | 5 | 8 | 35 | |
| 08:00 - 09:00 AM | 40 | 16 | 32 | 6 | 94 | |
| 09:00 - 10:00 AM | 55 | 22 | 36 | 11 | 124 | |
| 10:00 - 10:23 AM | 11 | 7 | 8 | 12 | 38 | |
| 10:23 - 11:00 AM | 16 | 11 | 12 | 19 | 58 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



