
Submitted:
20 October 2023
Posted:
24 October 2023
You are already at the latest version
Abstract
Multibeam echo-sounders provide ideal data for semi-automated seabed feature extraction and accurate morphometric measurements. However, these methods have not been tested in morphologically highly complex environments. In this study, bathymetric and raw backscatter data were initially used to manually map the complex reef morphology found in the semi-enclosed Gera Gulf, in the northern Aegean Sea (Greece). A large number of reefs (more than 7000) were detected, making manual mapping extremely time-consuming. Benthic Terrain Modeller (BTM) was selected as a semi-automated method to map the reefs. The BTM did not function properly in this irregular relief and the results were discouraging. Trying to improve the BTM functionality, both bathymetry and slope were modified (enhanced); this time, the BTM outcome was unexpectedly improved, producing accurate results that appeared to exceed the accuracy of manual mapping. To compare the final maps with the distribution of the reefs, mapcurves were created to estimate the Goodness-of-Fit (GOF), while Precision, Recall, and F1 Score were also calculated. GOF values suggest more than 50% overlap between the resulting polygons while, Precision, Recall and F1 score resulted in values higher than 0.78 suggesting good detection accuracy for the semi-automated method. It becomes apparent that BTM provided more efficient results in comparison to the time-consuming manual mapping. This study asserts that semi-automated mapping stands as an effective method for delineating the geomorphometry of intricate relief and serves as a powerful tool for habitat mapping and decision-making.
Keywords:
multibeam echosounder
; geomorphology
; benthic terrain modeler
; reef mapping
; semi-automatic delineation
1. Introduction
Geomorphometry of the seafloor terrain is a common outcome of multibeam echo-sounder (MBES) acoustic data that is required to categorise, visualise and quantify the seabed based on its abiotic characteristics and it can be also associated with benthic habitats [1]. Its results are important for decision making, spatial planning and ecological management by governmental and environmental organisations [2].
The most common and simple method is manual mapping; the expert uses bathymetric and backscatter data to determine the final zone boundaries of the map. Until recently, this method was considered to be the most accurate, although time consuming. Still, many semi-automated methods that have been used for geomorphometry or benthic habitat mapping show promising results, although they also have their challenges [3]. Many different approaches have been tried to date but there is not a unified protocol as each case study and the main focus of each survey may require several modifications [4].
One of those methods is the Benthic Terrain Modeller (BTM), which was developed in 2005 at Oregon State University in collaboration with the NOAA Coastal Services Center (CSC) GIS Integration and Development program [5,6]. This geoprocessing toolbox analyses benthic terrain and produces bathymetric derivatives such as slope, aspect and Bathymetric Position Index (BPI), a variation on the Topographic Position Index [7,8]. The tool is a free add-on for ArcMap, and it is widely used. Some of the recent studies have used the BTM toolbox to support spatial management [9], habitat mapping [10,11,12,13], sediment distribution [14], paleo-geomorphology [15,16], human impacts & geohazards [17], predictive habitat distribution model [18,19,20] and deriving spatial patterns of hydrodynamic processes [21]. In most of the above-mentioned cases the underwater relief was relatively even, thus BTM could be easily applied. However, there is no information about the use of the modeller in areas exhibiting highly irregular relief.
In this study, the unique geomorphology of a semi-enclosed embayment (Gera Gulf) in Lesvos Island (NE Aegean Sea, Greece) (Figure 1) has been the testing environment for BTM. Manoutsoglou et al., (2018) [22] described a large number of low-relief buildups using information of single-beam echosounder and a side scan sonar mosaic. Ground-truthing by drop-camera, scuba dives and sampling verified the presence of numerous small reefs consisting of benthic assemblages comprising mainly of molluscs in a fine-grained environment. She suggested that 19.27 km2 of the surveyed area is occupied by about 4400 densely distributed reefs, being 0.2-2.5 m in height. In this study high-resolution MBES data from the gulf are used aiming to (i) compare the results of manual mapping of the odd relief of the gulf with the semi-automated BTM method, (ii) enhance the MBES bathymetry in order to assist BTM to better detect the reefs and (iii) assess the suitability of this semi-automated method for complex low-relief reef mapping, comparing the resulting maps with the Goodness of Fit Index.
2. Materials and Methods
2.1. Data acquisition & processing
The bathymetric survey took place in April and November of 2022 over a dense grid of survey lines, using a Teledyne Reason SeaBat T20-R MBES, pole-mounted in R/V Amfitriti. The MBES comprised of a TC2181 transducer, an EM7219 receiver, a Valeport mini SVS for the correct swath projection, and a rack-mounted sonar processor which is configured with a fully integrated inertial navigation system (INS) Teledyne, Type-20. The INS uses an IMU (IP68) for motion correction (roll, heave, and acceleration measurements) and a RTK GNSS (Trimble) for position, time and high precision navigation. The INS is fully compliant with the Applanix POS MV Wavemaster II integrated into T20R processor. The vessel speed ranged from 3 to 4 knots. An area of about 30 km2 was surveyed (~ 75% of the total gulf area). The system was recording simultaneously 512 beams at 420 kHz over a swath angle of up to 140°. Sound velocity profiles were collected using a Valeport SWiFT. The bathymetric data were calibrated, sound velocity profiles were applied, and any acoustic noise or artifacts were removed utilizing Teledyne’s PDS software. A bathymetric ASCII file with 1 m cell size was exported from PDS. The raw backscatter data were also exported with 1 m cell size.
2.2. Manual mapping
For the manual mapping of the reefs, the bathymetry ASCII file was imported in ArcMap10.4. The Spatial Analyst Tool was used to generate slope and curvature. Only one user employed bathymetry, slope, curvature, and backscatter to manually map the reefs. In the shallower areas the reefs had a smaller relief, and their shape became more complex making it harder for the users to map their boundaries. In those areas, the users drew profiles on the bathymetric map to make the correct decision, whilst in some cases changing the contrast of the view was also effective. 7115 reefs were finally detected occupying an area of 10.4 km2 (Table 1). The shapefile that was created from the manual mapping was used to extract the bathymetry for each of the polygons with the Spatial Analyst tool Extract by Mask. Next, geomorphometry characteristics (maximum-minimum and average depth, maximum and minimum slope, area, perimeter, depth stand. deviation, slope stand. deviation) were extracted (Table 1) and matched to the polygon shapefile using Join and Statistics tool was used to extract statistical information about the geomorphometry of the reefs.
2.3. Semi-automated mapping
For the semi-automated mapping, the Benthic Terrain Modeler toolbox (Walbridge et al., 2018) was used, an easy add-on toolbox for ArcMap. Initially, the reef detection with BTM was not successful (Table 1), since only 50.3% of the reefs were detected to occupy an area about 90% smaller compared with that of the manually mapped reefs, some of them also found with considerable differences in shape and geomorphometric characteristics. Then, the Raster Calculator was used in order to modify the bathymetry, aiming to better discriminate and isolate the small reefs of this peculiar seafloor relief. Two attempts were tested, namely the BTM-B4 and the BTM-B4S2.
2.3.1. BTM-B4
During the first attempt to adjust the bathymetry, the following expression was used: square(square(“bathymetry”)). With this modification the divergence of the bathymetry values between pixels was increased, resulting in the discretization of the reefs. Then the standard BTM workflow was followed, creating broad (inner radius: 10, outer radius: 100) and fine (inner radius: 10, outer radius: 25) Bathymetric Position Index (BPI) that found to work best for the study area after trying many different neighbourhood sizes. The classification dictionary (Table 2) was edited according to the study area and the features to be delineated. As the reefs were detected in water depths deeper than 10 m, a boundary was placed along the 10 m isobath in the classification dictionary to avoid redundant artifacts.
In order to eliminate artifacts of the semi-automated method created in areas of successive MBES swaths overlap, polygons with an area of less than 8 m2 (the maximum extend of observed false polygons in areas of overlapping bathymetry) were deleted. As a final “touch-up”, Eliminate Polygon Parts was used to fill in any gaps in some small polygons, Smooth Polygon to smooth the polygons, Buffer to create a small buffer of 0.1 m around the reefs, and then Dissolve and merge any overlapping polygons. To calculate the geomorphology, the next steps are the same as described in the manual method followed by the rejection of reefs with a height of less than 5 cm, the majority located along the swath overlapping areas.
2.3.2. BTM-B4S2
The second attempt used Raster Calculator to change the bathymetry with the following expression: “bathymetry” – square(“slope”) * 100. This modification places more emphasis on the variation of the slope of the reefs rather than on the overall bathymetry of the gulf, making it easier for both the user and the BTM to detect the reefs. Then, the broad (inner radius: 10, outer radius: 100) and fine (inner radius: 10, outer radius: 25) Bathymetric Position Index (BPI) were created, which was found to work best for the study area after trying many different neighbourhood sizes. The classification dictionary (Table 3) was modified in relation to the surveyed region and the features to be distinguished.
This resulted in a good outline of the reefs, but in order to fill them out the same procedure was carried out this time using the expression: square(square(“bathymetry”)). In this way, by increasing the divergence of bathymetry values between pixels, the reefs were discriminated. Following, broad and fine BPIs were created with the same neighbourhood size used for the reef outline and a modified classification dictionary (Table 4).
The two rasters were merged creating the final reef raster, which was then converted into a polygon shapefile. As with BTM-B4, polygons with an area smaller than 8 m2 were eliminated to remove artifacts of the semi-automated approach that were produced in the MBES swath overlap areas. For a final “touch up”, Eliminate Polygon Parts was used to fill in any gaps in some small polygons, Smooth Polygon to smooth the polygons, Buffer to create a small buffer of 0.1 m around the reefs in order to use after the Dissolve and merge any overlapping polygons. The following procedures are the same as those outlined in the manual technique, followed by the rejection of reefs with a height of less than 5 cm, to determine the geomorphology.
2.4. Statistical comparison
2.4.1. Polygon overlap comparison
Mapcurves, a quantitative Goodness-Of-Fit (GOF) method, was chosen for the map (manual, BTM-B4, BTM-B4S2) overlap comparison. The method presents the degree of spatial concordance between two or more maps [7] and it is based on the degree of spatial overlap between the maps. The Reference Map (RF or Map 1) to which another map (Map 2) is compared determines the direction of the comparison, and the combination that produces the best degree of fit is considered to be the level of similarity between the maps. The GOF algorithm (equation 1) is based on two values (Figure 2): (1) the proportion of the intersecting area (C) to the total area of the intersecting category from Map 2 (B+C), and (2) the proportion of the intersecting area (C) to the total area of the category from Map 1 (A+C). The first term gives the proportion of ‘‘insideness’’ that the reference category shares with the tested category, and itself represents a GOF term. The second term weights this degree of fit by the fractional share of the Map 1 category’s area that is intersected. Without that area weighting, the presence of many large intersecting categories, each one of which might share only a small spatial intersection with the category being tested, would result in a high degree of fit. Multiplying these two values, a single number for the total percentage of overlap for the reefs in each map arises. All possible combinations were tested in order to determine the optimum one.
Intersect was used to merge each polygon pear, Calculate Geometry to calculate the polygon area and finally Spatial Join. Using the Join command and the FID as a criterion, the attribute tables of the polygons were matched. The FID and area values of the attribute table were exported into an Excel file, where GOF values were calculated. After, the percentage of polygons that satisfied a series of increasing values (every 0.01) of the GOF index (COUNTIF command) was found and the according mapcurve graph was created. The area under the curve of the graph was calculated giving a unique GOF value for the entire map.
2.4.2. Detection accuracy
For the polygons that were not detected by the semi-automated or manual methods and vice versa, Precision, Recall and F1 Score statistical indexes were calculated. Precision is the quotient of the successfully detected reefs with the total number of reefs detected from the method tested. Recall is the quotient of the successfully detected reefs with the total number of reefs detected from the reference method. F1 Score (equation 2) is a weighted average of Precision and Recall, taking values from 0 to 1 (1 corresponds to the highest precision).
For calculating these indexes, manual mapping was considered as the reference method.
2.4.3. Correlation of geomorphological characteristics
Further, using Excel, scatter plots of the various geomorphological characteristics and the GOF index were created, and trend lines were plotted to detect if there are correlations between the geomorphological characteristics of the reefs and the depth they are located. The scatter plots that were generated were: depth/height, slope/depth, area/depth, maximum slope/height, area/height, GOF/height, GOF/depth.
3. Results
The 3 methods used for the Gera Gulf reef detection resulted in 3 polygon shapefiles (Figure 3) and for each one the geomorphological features were extracted (Table 1). An example of the overlapping polygons in 4 different areas along the gulf is shown in Figure 4. After rejecting polygons with area less than 8 m2 and height less than 5 cm for all methods, the reefs detected by the manual mapping were 7115, by the BTM-B4 were 7441 and by the BTM-B4S2 were 8923.
In areas where the relief is complex, manual mapping considered that the reefs were united, whilst the semi-automated methods tended to fragment these large reefs into smaller polygons, thus resulting in more reefs. Consequently, manual mapping produced polygons with very large area, perimeter and height, reaching 0.26 km2 and 4.5 m respectively, near the gulf entrance, contrasting with the semi-automated methods polygons. The results of area and height distribution were visualized into the same categories for all methods used (Figure 5 and Figure 6). It appears that the geomorphology detected by the BTM-B4S2 method is closer to the results of the manual mapping (Table 1). Even if the number of reefs between the manual and the BTM-B4S2 has the biggest difference, because the semi-automated method tended to fragment the polygons, the total area of the reefs differs just 0.01 km2.
The polygons detected from manual mapping were also compared with those not detected from BTM-B4 and BTM-B4S2 and vice versa (Figure 7 and Table 5). Manual mapping failed to detect 567 reefs distinguished by BTM-B4 and 1939 reefs detected by BTM-B4S2, most of which are in the shallower part, where complex morphology is observed. BTM-B4 failed to detect 993 reefs and BTM-B4S2 failed to distinguish 236 reefs noticed by manual mapping. These reefs are small in height and area.

Table 5.
Results of geomorphometry comparison between the methods used.
| Manual VS BTM-B4 | BTM-B4 VS Manual | Manual VS BTM-B4S2 | BTM-B4S2 VS Manual | |
|---|---|---|---|---|
| Reef Number | 993 | 567 | 236 | 1939 |
| Min. Area (m2) | 8.47 | 9.67 | 8.47 | 9.31 |
| Max. Area (m2) | 2111.9 | 9011.68 | 548.76 | 24384.7 |
| Mean Area (m2) | 114.93 | 534.3 | 47.48 | 275.83 |
| Min. Height (m) | 0.05 | 0.05 | 0.05 | 0.05 |
| Max. Height (m) | 0.815 | 1.35 | 0.81 | 1.7 |
| Mean Height (m) | 0.177 | 0.18 | 0.1 | 0.16 |
Regarding the detection accuracy, for BTM-B4 the Precision index is 0.92, the Recall index is 0.97, and the F1 Score (the accuracy of mapping) is 0.94. For BTM-B4S2 Precision index is 0.78, Recall index is 0.98, and F1 Score is 0.87, suggesting that this method is quite precise but less accurate than the BTM-B4. The difference in F1 Score results from the bigger number of reefs detected by the semi-automated methods compared to the number of reefs detected manually. However, the fragmentation of the reefs in the semi-automated methods also plays an important role, leading to a partial distortion of the true value of the index (tending to reduce the F1 Score). It is, of course, important to note that even in manual mapping it is very likely that errors are still present. Some reefs not found by the semi-automated methods may indeed not be present but may be also due to human error. It is possible that in some cases the results of semi-automated mapping are more valid than those of manual. However, the most valid and proven methodology available to date is manual mapping and this is considered to be the basis of any comparison in order to determine the accuracy of the “more modern” semi-automated seabed mapping techniques.
Reefs not detected by manual mapping but only by BTM-B4 and BTM-B4S2 (Figure 7) are, as indicated by their mean values, of small area and height. Of course, there are some exceptions, especially from the semi-automated methods. These reefs are concentrated at the shallower part of the study area (around the perimeter of the gulf) and especially near the channel connecting the gulf with the open sea, where the topography becomes more complex. The total area of reefs detected by the semi-automated methods is much larger than the total area of reefs detected by the manual method. Observing the resulting BTM reefs, they exhibit a fairly realistic pattern of shape, structure and distribution, consistent with the patterns of reef development in this area of the gulf. It is therefore possible that the semi-automated methods were able to identify some reefs that the user failed to map due to the complexity of the topography.
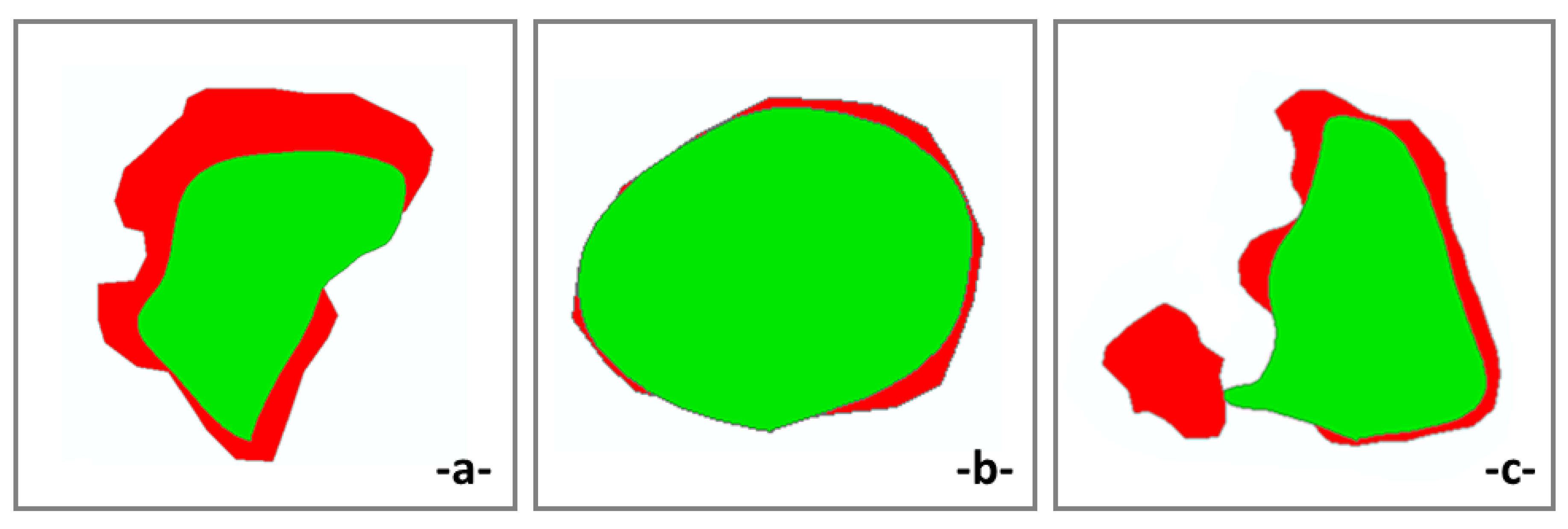
As for the reefs detected from both manual and BTM methods, GOF index was calculated (Figure 8) and Mapcurves were plotted (Figure 9). From the level of similarity between the methods, the best degree of fit resulted when the manual method was used as the RF producing a GOF of 0.56 with BTM-B4 and 0.66 with BTM-B4S2. This shows that we had more than 50% overlap for the polygons, and the BTM-B4S2 polygons overlapped better with the manual. The extremely low GOF values, reduced the unique GOF value to some extent. These low GOF values were either due to reefs not detected by the semi-automated methods with minimal overlap with adjacent detected reefs, or to vessel routes overlap (Figure 4 -iii-). The reefs of the semi-automated methods that exhibited this issue at the overlap parts are problematic not only in their GOF value, but also in their geomorphological characteristics since they are perceived by ArcMap as one reef instead of several individuals.
Figure 8.
Sketch showing polygons with (a) unique, (b) maximum and (c) low GOF values (red polygon: manual mapping, green polygon: BTM-B4).
Figure 8.
Sketch showing polygons with (a) unique, (b) maximum and (c) low GOF values (red polygon: manual mapping, green polygon: BTM-B4).
Concerning the potential relationships between the geomorphological characteristics of the reefs, the statistical testing showed that there is no significant correlation between the geomorphological parameters, neither with the depth at which the reefs are located, nor with their height or with their area (with a standard deviation R2<0.4). However, the only correlation identified was between maximum slope and height, with standard deviation R2=0.62 for the manual, R2=0.67 for BTM-B4 and R2=0.68 for BTM-B4S2. This indicates that high slopes are mainly observed in reefs of a big relief, meaning that "tall" reefs tend to have steeper slopes, rather than gentle slopes.
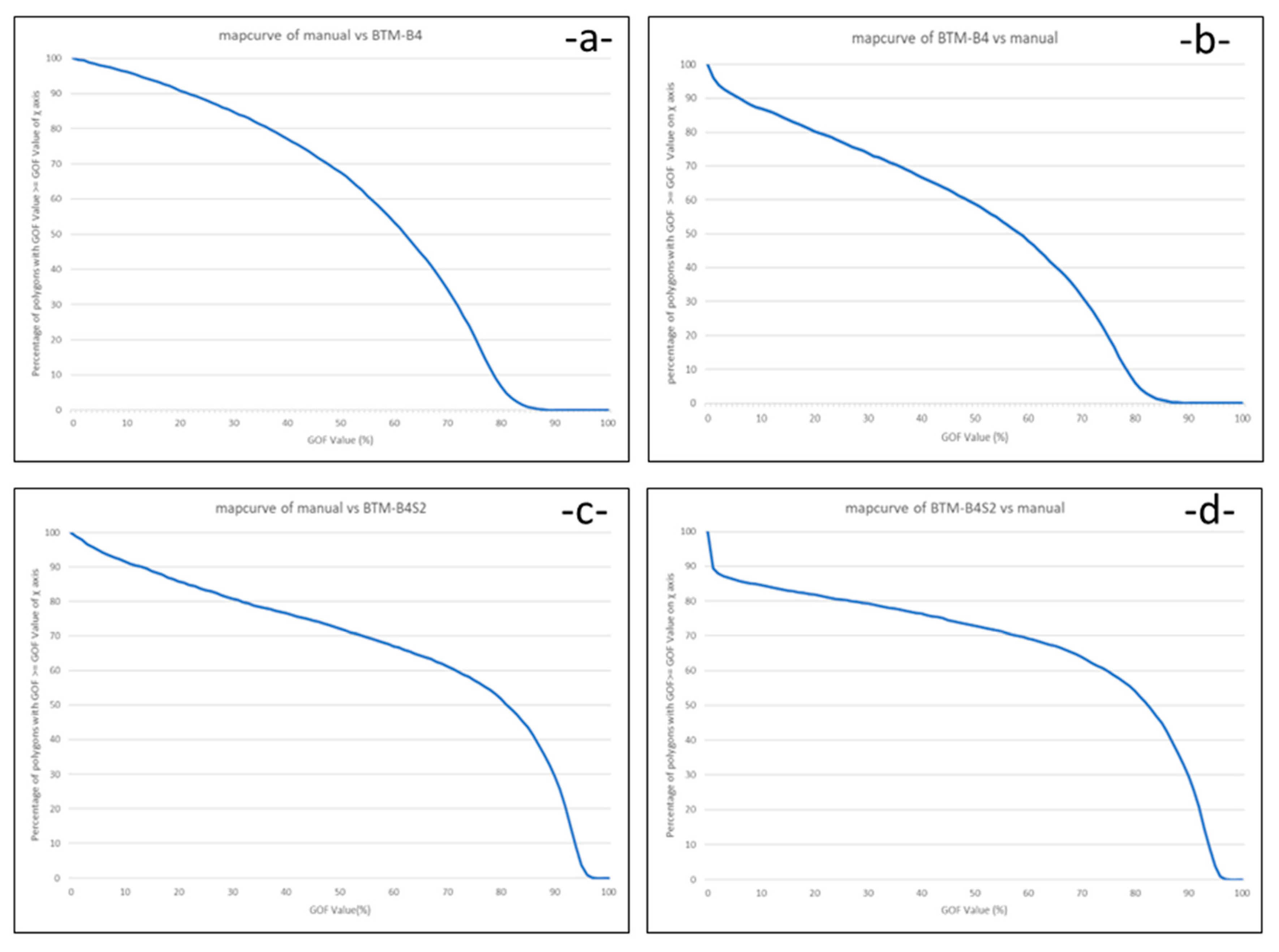
Figure 9.
Mapcurve for GOF calculation using (a) manual as RF compared to BTM-B4, (b) BTM-B4 as RF compared to manual, (c) manual as RF compared to BTM-B4S2, and (d) BTM-B4S2 as RF compared to manual.
Figure 9.
Mapcurve for GOF calculation using (a) manual as RF compared to BTM-B4, (b) BTM-B4 as RF compared to manual, (c) manual as RF compared to BTM-B4S2, and (d) BTM-B4S2 as RF compared to manual.
4. Discussion
Τwo methods, manual and semi-automated (Benthic Terrain Modeller), were utilized for the detailed mapping of the Gera Gulf reefs, using a 1x1 m bathymetric grid and raw backscatter data. Slope, curvature, and raw backscatter were used, while in areas of complex morphology, bathymetric profiles helped to identify reef boundaries. Manual mapping is a time-consuming and intense method, subject to the experience of the user. On the other hand, semi-automated methods are time-efficient, and not subject to the user, making it harder to “miss a spot”. For this project manual mapping took about 400 hours of work, while semi-automated mapping took about 30-35 hours, not accounting for the time initially needed for studying the basic principles and learning / understanding how to use BTM. Therefore, it is profound that there is an about twelvefold increase in the human effort during manual mapping, however not securing accurate results.
In this study, BTM initially did not seem to work properly with the small scale of the reefs. However, by modifying the bathymetry and slope, to increase the height difference between the reefs and the seabed, the reefs became detectable by the BTM. Depending on the morphology of the seabed, it is possible that different modifications of bathymetry and slope may help to achieve very satisfactory results. This can be also tested / applied in other peculiar relief seafloor environments, i.e., densely distributed pockmark areas, or zones of outcropping rocks etc.
Furthermore, the quality of the data is also important for the semi-automated methods, as it affects the accuracy of the polygons (shape, detectability), and especially for BTM-B4S2 noise in areas of overlapping bathymetry was easy to detect. It is possible to remove most of these errors by manual correction, but this can be time consuming. The accuracy of the BTM-B4 was lower, but the noise errors were eliminated, and the time required to complete the entire process was less.
In any case, either by modification of the initial bathymetry or by subsequent correction of the polygon, we can obtain much more reliable and accurate results. Depending on the accuracy requirements of the research question, one method may be chosen over the other. In both cases, however, the semi-automated methods gave precise results.
As mentioned above, the time and effort required for both semi-automated methods were about twelvefold lower the time required for manual mapping and the results were satisfactory. BTM appears to be a good solution for mapping complex relief features and should probably be preferred. In some cases of highly complex micro-relief, the semi-automated methods may work even better by identifying morphological anomalies that the user may miss.
Most of the studies that applied BTM are just for extracting bathymetric parameters (BPI, slope, curvature, etc). The only works that have used manual mapping and BTM for feature delineation are by Jarna et al., (2019) [25] and Menandro et al., (2020) [10]. The first authors applied their methodology for cold water carbonate mounds. They detected about 3500 mounds over 6.01 km2 with manual mapping and over 7.35 km2 with BTM mapping distributed along an extensive study area of 76 km2. Also, Menandro et al., (2020) [10] detected reefs with a total area of 2.96 km2 with manual and 6.85 km2 with BTM mapping in an area of 20 km2. In this study the surveyed area was about 30 km2 and more than 7000 reefs detected to occupy the seafloor, covering an area of 10.4 km2 as found by manual mapping. Even if BTM was initially unsuccessfully applied for the feature detection, the modified bathymetry assisted to observe the reefs with high accuracy. Consequently, the BTM-B4 detected reefs that cover an area of 6.8 km2, whilst BTM-B4S2 distinguished reefs over 10.3 km2. It can therefore be understood that the density and number of reefs in Gera Gulf provide a real 'crash test' environment not only for BTM but probably, also, for testing / comparing other semi-automated and automated feature extraction methods.
Our results are consistent with those of the previous study in the area (Manoutsoglou et al., 2018) [22], but this time covering with detailed data the majority of the gulf where reefs occur. The spatial distribution of reef height and size in Gera Gulf was confirmed, adding more information to the puzzle. Also, even with the new higher accuracy MBES data, the lack of a strong correlation between the morphological characteristics of the reefs and depth was again confirmed.
5. Conclusions
In this study, high quality MBES bathymetric and raw backscatter data were used to map manually and with BTM the reefs of a unique and morphologically complex area that provides an ideal “crash test” environment for semi-automated methods to test their feature detection capabilities. Over 7000 reefs were distinguished and their geomorphometric characteristics were extracted. Following bathymetric enhancement, the semi-automatic method was able to detect the relief of the reefs even better than the manual method in areas where the terrain was really complex. The difficulty for BTM was tracked in areas where the bathymetric data overlapped and created artifacts. The time required to clean up these artifacts is easily compensated for by the extremely time-consuming manual mapping. It becomes apparent that, although with caution, the semi-automated methods can, either independently or with slight bathymetric data modifications, give reliable morphological and morphometric results in highly complicated submarine terrains, also contributing to benthic habitat and sensitive ecosystems mapping.
Author Contributions
Conceptualization, T.H. and V.L.; Methodology, V.L. P.K. and O.A.; Writing – Original Draft Preparation, ALL AUTHORS; Writing – Review & Editing, V.L. and T.H.; supervision, T.H.; project administration, T.H.; funding acquisition, T.H. All authors have read and agreed to the published version of the manuscript.
Funding
This research work was supported by the “Coastal Environment Observatory and Risk Management in Island Regions AEGIS+” (MIS 5047038) project, implemented under the Operational Programme “Competitiveness, Entrepreneurship and Innovation” (NSRF 2014-2020), co-financed by the Hellenic Government (Ministry of Development and Investments), and the European Union (European Regional Development Fund, Cohesion Fund).
Data Availability Statement
Research data could be shared from e-mail query.
Acknowledgments
The authors acknowledge the valuable assistance of Ivan Theofilos Petsimeris, Anastasios Poulos and Nikolaos Hatzilias (captain of R/V Amfitriti) during the field work.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Dolan, M.; Thorsnes, T.; Leth, J.; Al-Hamdani, Z.; Guinan, J.; Van Lancker, V.; Terrain characterization from bathymetry data at various resolutions in European waters - experiences and recommendations. Norges Geologiske Undersøkelse (Geological Survey of Norway) 2012, Report No. 2012.045. Available online: https://www.ngu.no/upload/Publikasjoner/Rapporter/2012/2012_045.pdf (accessed on 17 October 2023).
- Harris, T.; Baker, K. Why map benthic habitats? in Seafloor geomorphology as benthic habitat. Elsevier 2012, pp. 3–22. ISBN 9780123851406. [CrossRef]
- Bishop, Μ.; James, A.; Shroder, J.; Walsh, S. Geospatial technologies and digital geomorphological mapping: Concepts, issues and research. Geomorphology 2012, 137, 5–26. [Google Scholar] [CrossRef]
- Montereale-Gavazzi, G.; Madricardo, F.; Janowski, L.; Kruss, A.; Blondel, P.; Sigovini, M.; Foglini, F. Evaluation of seabed mapping methods for fine-scale classification of extremely shallow benthic habitats – Application to the Venice Lagoon, Italy. Estuarine, Coastal and Shelf Science 2016. 170. 45-60. [CrossRef]
- Wright, D.J.; Lundblad, E.R.; Larkin, E.M.; Rinehart, R.W.; Murphy, J.; Cary-Kothera, L.; Draganov, K. ArcGIS Benthic Terrain Modeler. Corvallis, Oregon, Oregon State University, Davey Jones Locker Seafloor Mapping/Marine GIS Laboratory and NOAA Coastal Services Center 2005.
- Lundblad, E.; Wright, D.; Miller, J.; Larkin, E.; Rinehart, R.; Naar, D.; Donahue, B.; Anderson, S.; Battista, T. A Benthic Terrain Classification Scheme for American Samoa. Marine Geodesy 2006, 29, 89–111. [Google Scholar] [CrossRef]
- Guisan, A.; Weiss, S.B.; Weiss, A.D. GLM versus CCA spatial modeling of plant species distribution. Plant Ecology 1999, 143, 107–122. [Google Scholar] [CrossRef]
- Weiss, A.D.. Topographic Positions and Landforms Analysis (Conference Poster). Proceedings of the 21st Annual ESRI User Conference. San Diego, CA, July 9-13, 2001.
- Bridges, A.; Barnes, D.; Bell, J.; Ross, R.; Voges, L.; Howell, K. Filling the data gaps: Transferring models from data-rich to data-poor deep-sea areas to support spatial management. Journal of environmental management 2023, 345, 118325–10. [Google Scholar] [CrossRef] [PubMed]
- Menandro, P.; Bastos, A.; Boni, G.; Ferreira, L.; Vieira, F.; Lavagnino, A.C.; Moura, R.; Diesing, M. Reef Mapping Using Different Seabed Automatic Classification Tools. Geosciences 2020, 10, 72–10. [Google Scholar] [CrossRef]
- Oliveira, N.; Bastos, A.; Quaresma, V.; Vieira, F. The use of Benthic Terrain Modeler (BTM) in the characterization of continental shelf habitats. Geo-Marine Letters 2020, 40. [Google Scholar] [CrossRef]
- Janowski, L.; Wroblewski, R.; Dworniczak, J.; Kolakowski, M.; Rogowska, K.; Wojcik, M.; Gajewski, J. Offshore benthic habitat mapping based on object-based image analysis and geomorphometric approach. A case study from the Slupsk Bank, Southern Baltic Sea. Science of The Total Environment 2021, 801, 149712–10. [Google Scholar] [CrossRef] [PubMed]
- Fan, M.; Shi, S.; Ma, Y.; Wang, H.; Zhai, J.; Zhang, X.; Ning, P. High resolution geomorphological classification of benthic structure on the Western Pacific Seamount. Frontiers in Marine Science 2022, 9. [Google Scholar] [CrossRef]
- Gougeon, S.; Kemp, K.; Blicher, M.; Yesson, C. Mapping and classifying the seabed of the West Greenland continental shelf. Estuarine, Coastal and Shelf Science 2017, 187. [Google Scholar] [CrossRef]
- Pandolpho, B.T.; Urlaub, M.; Berndt, C.; Bialas, J. Identification and differentiation of vertical movement through morphological changes and stratigraphic imprint: Two distinct uplifting mechanisms in the upper Calabrian accretionary wedge, western Ionian Sea. Basin Research 2023, 00, 1–25. [Google Scholar] [CrossRef]
- Hasan, O.; Smrkulj, N.; Miko, S.; Brunovic, D.; Ilijanic, N.; Sparica Miko, M. Integrated Reconstruction of Late Quaternary Geomorphology and Sediment Dynamics of Prokljan Lake and Krka River Estuary, Croatia. Remote Sensing 2023, 15, 2588–10. [Google Scholar] [CrossRef]
- Diaz Mendoza, G.; Kramer, K.; von Ronn, G.; Schwarzer, K.; Heinrich, C.; Reimers, H.C.; Winter, C. Circular structures on the seabed: differentiating between natural and anthropogenic origins—Examples from the Southwestern Baltic Sea. Frontiers in Earth Science 2023, 11. [Google Scholar] [CrossRef]
- Mackin-McLaughlin, J.; Nemani, S.; Misiuk, B.; Templeton, A.; Gagnon, P.; Edinger, E.; Robert, K. Spatial distribution of benthic flora and fauna of coastal placentia bay, an ecologically and biologically significant area of the island of newfoundland, atlantic Canada. Frontiers in Environmental Science 2022, 10, 999483. [Google Scholar] [CrossRef]
- Nemani, S.; Cote, D.; Misiuk, B.; Edinger, E.; Mackin-McLaughlin, J.; Templeton, A.; Shaw, J.; Robert, K. A multi-scale feature selection approach for predicting benthic assemblages. Estuarine, Coastal and Shelf Science 2022, 277. [Google Scholar] [CrossRef]
- Fakiris, E.; Dimas, X.; Giannakopoulos, V.; Geraga, M.; Koutsikopoulos, C.; Ferentinos, G.; Papatheodorou, G. Improved predictive modelling of Coralligenous formation in the Greek Seas incorporating large-scale, presence-absence, hydroacoustic data and oceanographic variables. Frontiers in Marine Science 2023, 10. [Google Scholar] [CrossRef]
- Summers, G.; Lim, A.; Wheeler, A. A Characterisation of Benthic Currents from Seabed Bathymetry: An Object-Based Image Analysis of Cold-Water Coral Mounds. Remote Sensing 2022, 14, 4731. [Google Scholar] [CrossRef]
- Manoutsoglou, E.; Hasiotis, T.; Kyriakoudi, D.; Velegrakis, A.; Lowag, J. Puzzling micro-relief (mounds) of a soft-bottomed, semi-enclosed shallow marine environment. Geo-Marine Letters 2018, 38, 359–370. [Google Scholar] [CrossRef]
- Walbridge, S.; Slocum, N.; Pobuda, M.; Wright, D.J. Unified Geomorphological Analysis Workflows with Benthic Terrain Modeler. Geosciences 2018, 8, 94–10. [Google Scholar] [CrossRef]
- Hargrove, W.; Hoffman, F.; Hessburg, P. Mapcurves: A quantitative method for comparing categorical maps. Journal of Geographical Systems 2006, 8, 187–208. [Google Scholar] [CrossRef]
- Jarna, A.; Baeten, N.; Elvenes, S.; Bellec, V.; Thorsnes, T.; Diesing, M. Semi-Automatic Versus Manual Mapping of Cold-Water Coral Carbonate Mounds Located Offshore Norway. International Journal of Geo-Information 2019, 8, 40–10. [Google Scholar] [CrossRef]
Figure 1.
The location of the study area (Gera Gulf) in Greece and Lesvos Island (red circle).
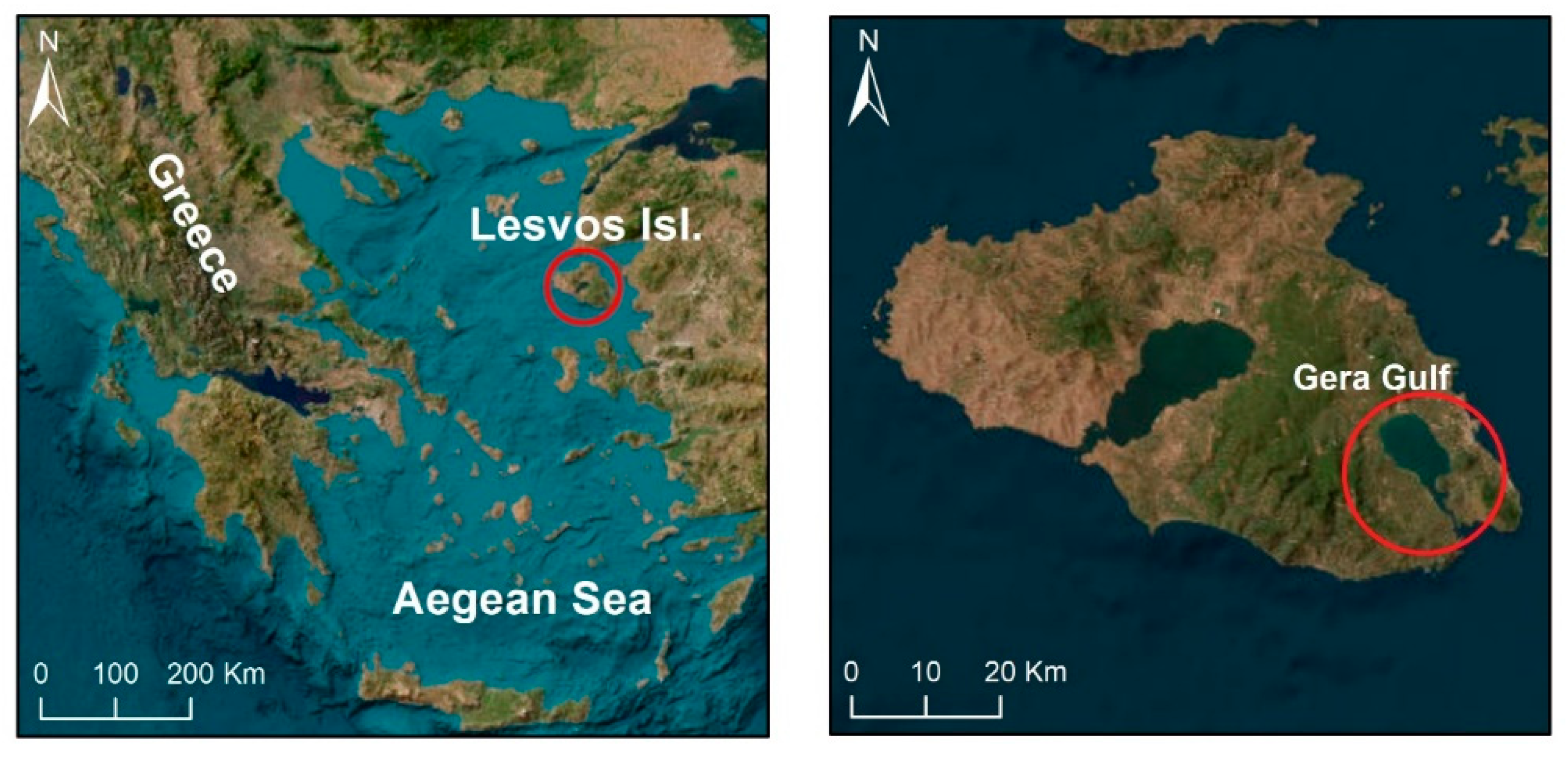
Figure 2.
Sketch of overlapping maps (reefs) representing the values of GOF.
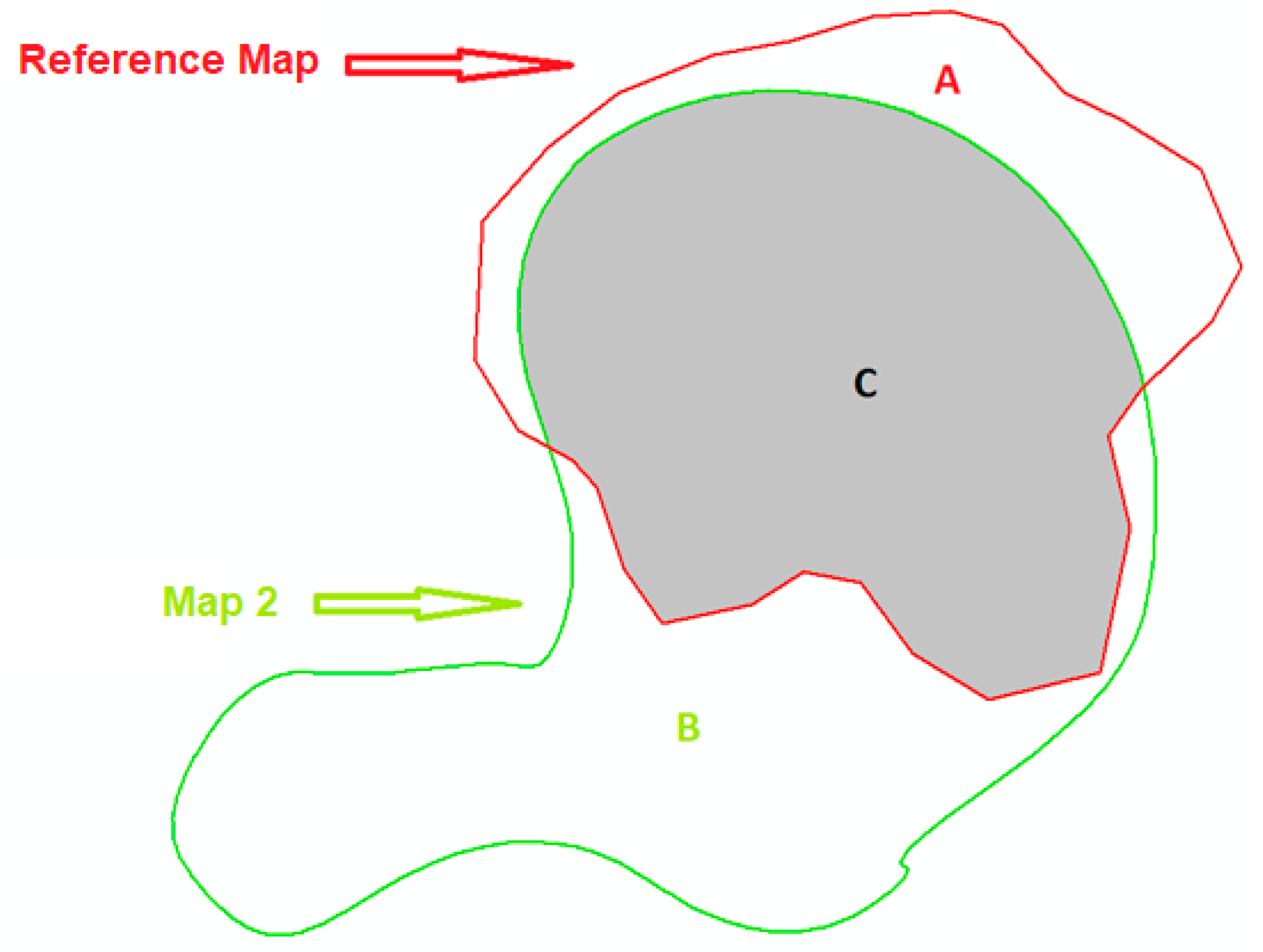
Figure 3.
Polygons (reefs) produced by (a) manual, (b) BTM-B4, and (c) BTM-B4S2 mapping.
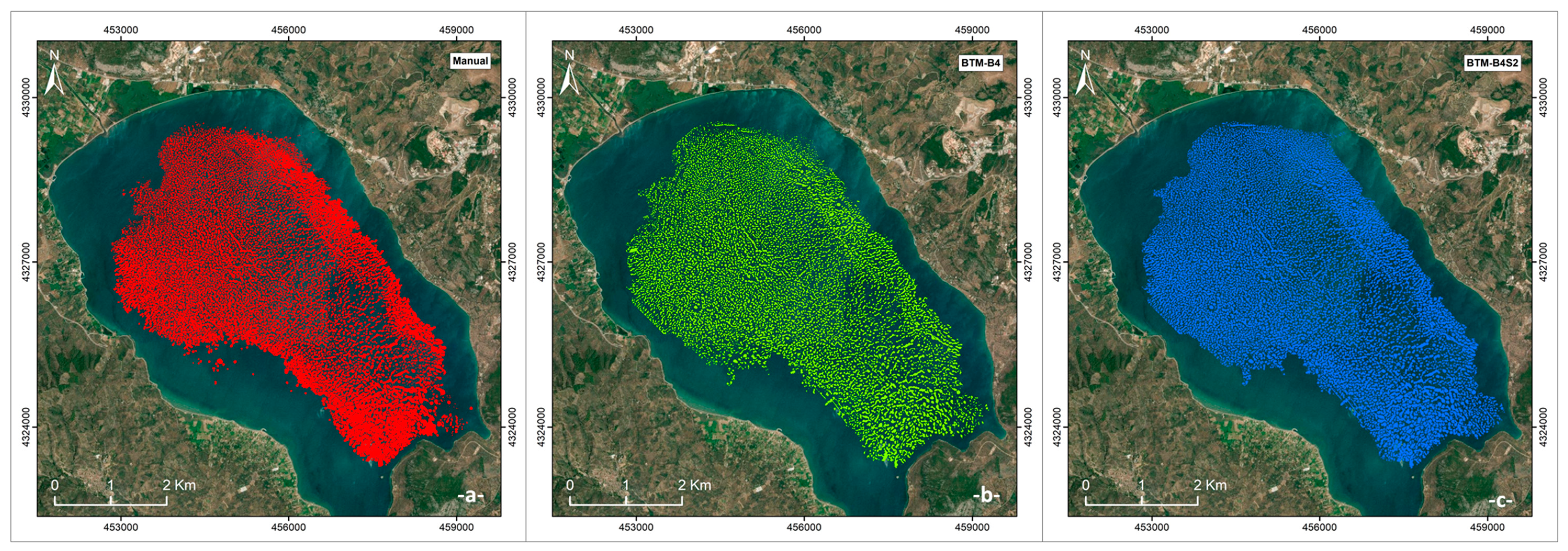
Figure 4.
Bathymetric map of Gera Gulf, with zoom-in areas showing the resulting polygons for all methods (red polygons: manual, green: BTM-B4, blue: BTM-B4S2).
Figure 4.
Bathymetric map of Gera Gulf, with zoom-in areas showing the resulting polygons for all methods (red polygons: manual, green: BTM-B4, blue: BTM-B4S2).
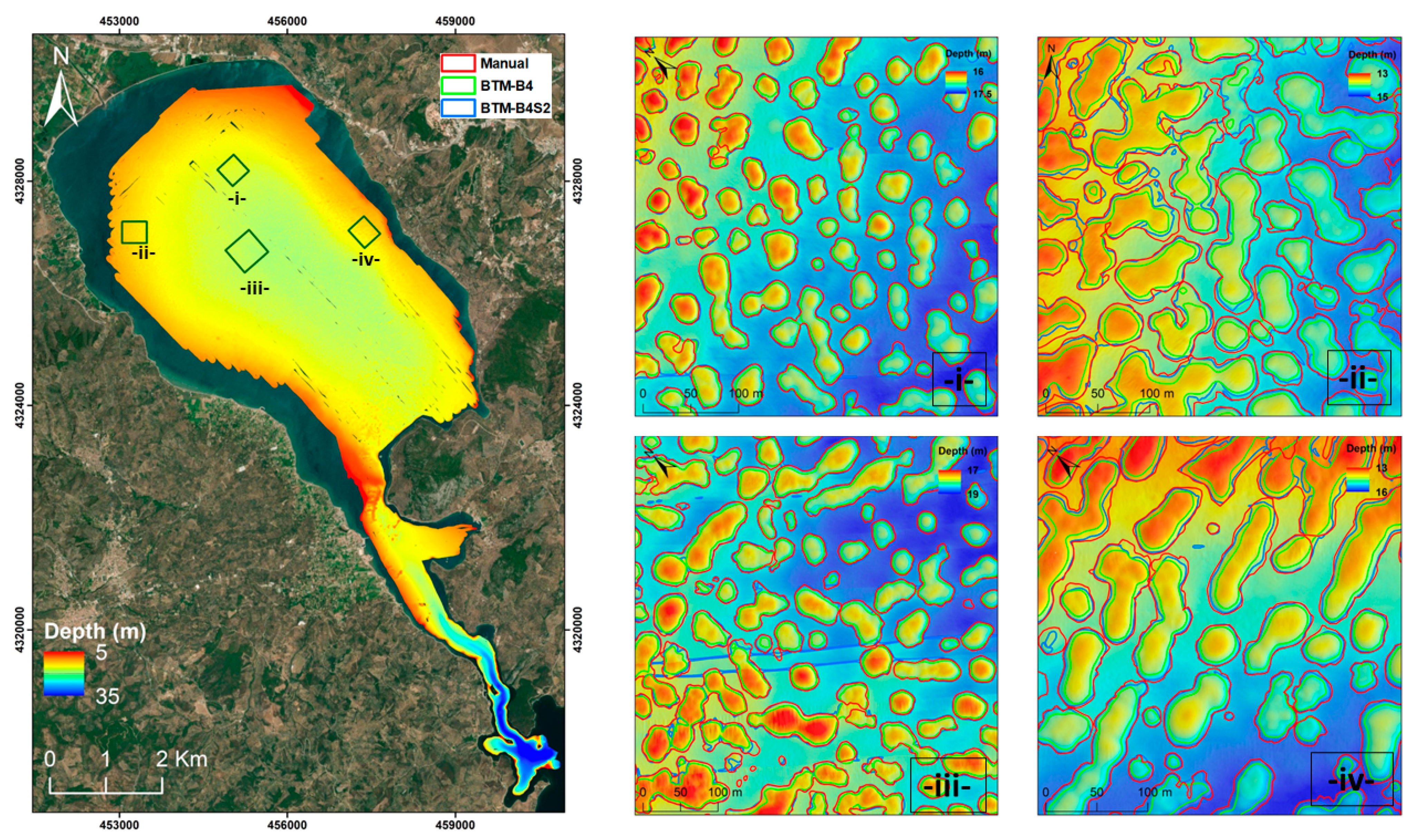
Figure 5.
Categorization of reef heights, created by (a) manual, (b) BTM-B4, and (c) BTM-B4S2 mapping.
Figure 5.
Categorization of reef heights, created by (a) manual, (b) BTM-B4, and (c) BTM-B4S2 mapping.
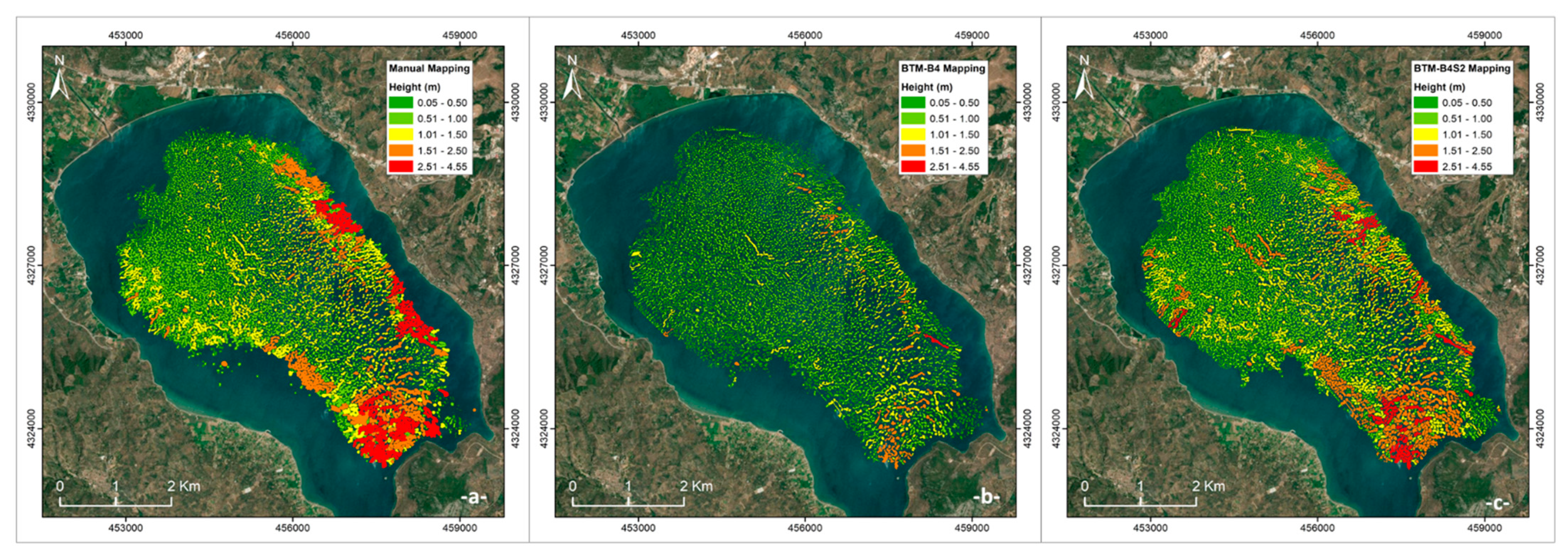
Figure 6.
Categorization of reefs area, created by: (a) manual, (b) BTM-B4, and (c) BTM-B4S2 mapping.
Figure 6.
Categorization of reefs area, created by: (a) manual, (b) BTM-B4, and (c) BTM-B4S2 mapping.
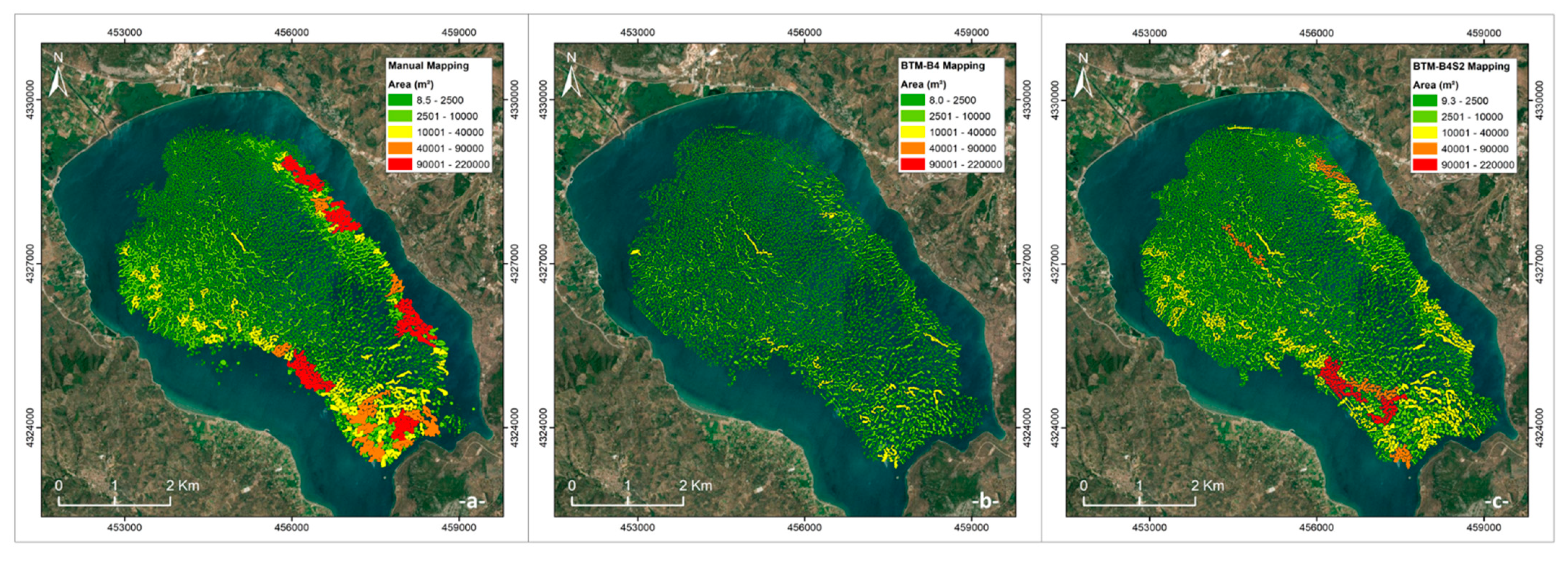
Figure 7.
Map of the reefs not detected by (a) manual BTM-B4 mapping, and (b) by manual or BTM-B4S2 mapping.
Figure 7.
Map of the reefs not detected by (a) manual BTM-B4 mapping, and (b) by manual or BTM-B4S2 mapping.
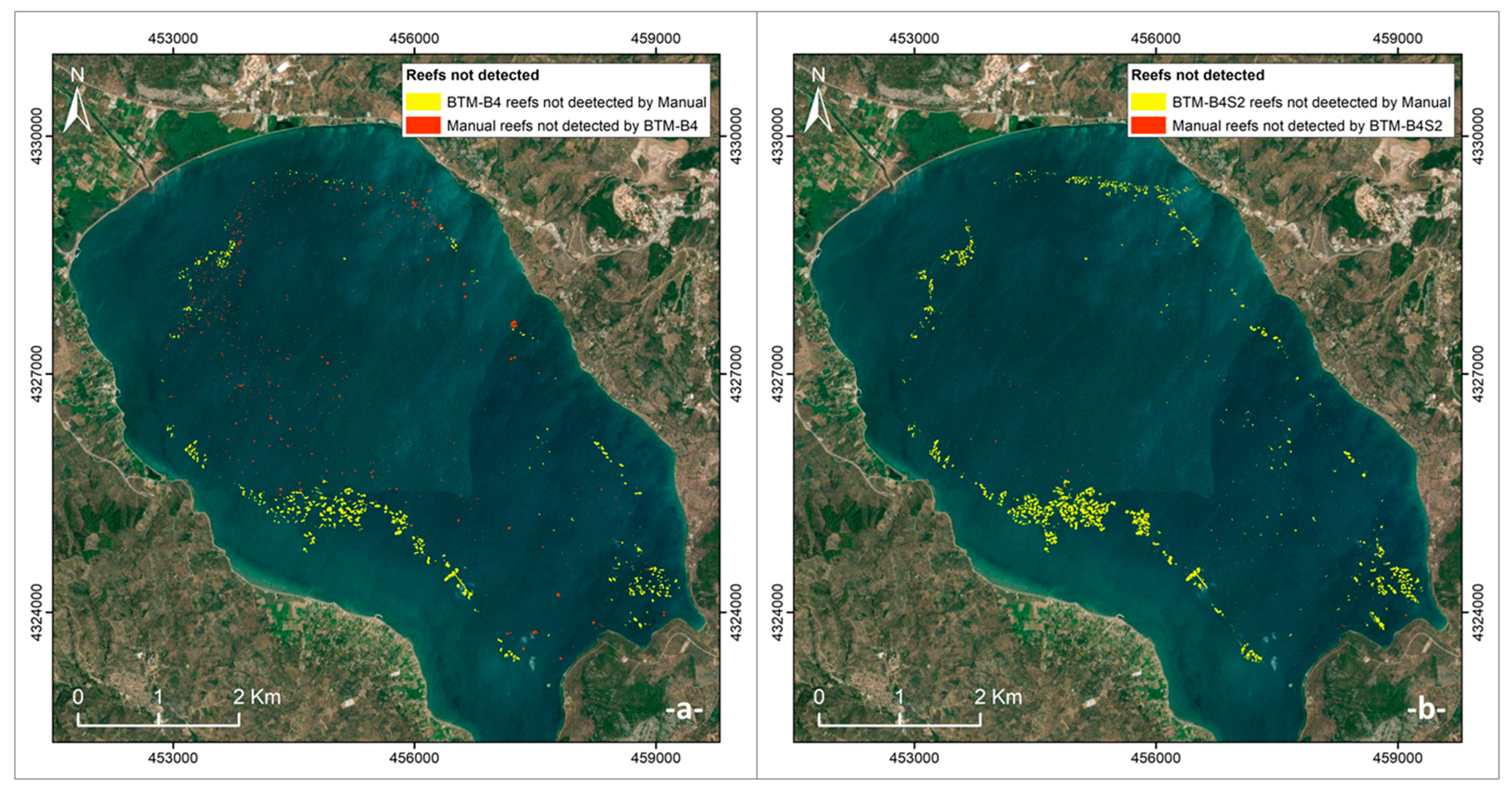
Table 1.
The geomorphometry results of manual, BTM, BTM-B4 and BTM-B4S2 mapping.
| Number of Reefs | Mean reef perimeter (m) | Max reef area (m2) | Sum. Area (km2) | Max. Height (m) | Mean Height (m) | Max. Slope (°) | Mean Slope (°) | |
|---|---|---|---|---|---|---|---|---|
| Manual | 7115 | 147 | 215743 | 10.4 | 4.5 | 0.65 | 15 | 2.4 |
| BTM | 3576 | 60 | 7899 | 1.1 | 3.0 | 0.25 | 15 | 3.6 |
| BTM-B4 | 7441 | 120.5 | 35478 | 6.8 | 2.7 | 0.47 | 13 | 2.1 |
| BTM-B4S2 | 8923 | 141.8 | 147497 | 10.3 | 3.7 | 0.54 | 15 | 2.2 |
Table 2.
Classification dictionary used for creating BTM-B4.
| Class | Zone | Broad BPI Lower | Broad BPI Upper | Fine BPI Lower | Fine BPI Upper | Slope Lower | Slope Upper | Depth Lower | Depth Upper |
|---|---|---|---|---|---|---|---|---|---|
| 1 | reef | -2000 | 1 | -6000 | 0 | 0 | 15.08 | 12.5 | |
| 2 | other | 1 | 2000 | -20 | 6000 | 0 | 68 | 10 |
Table 3.
Classification dictionary used for creating the reef slopes for BTM-B4S2.
| Class | Zone | Broad BPI Lower | Broad BPI Upper | Fine BPI Lower | Fine BPI Upper | Slope Lower | Slope Upper | Depth Lower | Depth Upper |
|---|---|---|---|---|---|---|---|---|---|
| 1 | reef | -20000 | 2 | -20000 | 0 | 0.001 | 15.08 | 10 | |
| 2 | other | 2 | 20000 | 0 | 20000 | 0 | 68 | 10 |
Table 4.
Classification dictionary used for creating the reef peaks for BTM-B4S2.
| Class | Zone | Broad BPI Lower | Broad BPI Upper | Fine BPI Lower | Fine BPI Upper | Slope Lower | Slope Upper | Depth Lower | Depth Upper |
|---|---|---|---|---|---|---|---|---|---|
| 1 | reef | -2000 | 5 | -6000 | 0 | 0 | 15.08 | 12.5 | |
| 2 | other | 1 | 2000 | 0 | 6000 | 0 | 68 | 10 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



