
Submitted:
28 October 2023
Posted:
31 October 2023
You are already at the latest version
Abstract
Ultrasonic feedback energy is affected by the variety, planting and growth state of crops, it is difficult to fine application in precision agriculture systems. To this end, an ultrasonic sensor was mounted in a spray boom height detection system. Winter wheat was used as the test object to obtain feedback energy values for the spray boom height from the top of the wheat in the field during six critical growth stages: the standing stage, jointing stage, booting stage, heading stage, filling stage and maturity stage. The relationship between the actual value of the height from the spray boom to the top of wheat (Habw) and the detected value of the height from the spray boom to the top of wheat (Hdbw) was analyzed. A spray boom height detection model based on the ultrasonic sensor during the full growth cycle of wheat was determined. Field validation tests showed that the applicability of the spray boom height detection distance (Dd) of the spray boom height detection model proposed in the present study was 450 mm~950 mm. Within the applicable Dd range, the detection error of the detection model was ≤5 cm during the full growth cycle. This study provides an ultrasonic detection model construction method, which improves the reliability and accuracy of ultrasonic boom height detection for different wheat growth stages.
Keywords:
ultrasonic waves
; crop canopy detection
; spray boom height
; detection model
; precision agriculture
1. Introduction
With the rapid development of smart agriculture in China, unmanned farms and smart machines have become realistic and essential tools for realizing smart agriculture [1]. As a core technology on unmanned farms, measurement and control systems composed of various sensors provide important guidance for the development of smart agriculture. The real-time information input for the operation of an unmanned farm is the direct source of information for smart agricultural machinery to achieve specific operations [2,3]. As the most widely used ground equipment for field spraying on unmanned farms, the boom sprayer has the advantages of wide working width and high efficiency. However, when spraying narrow-row crops, due to the crop growth, morphology at different growth stages and uneven ground, regulating the spray boom height poses a great challenge. Boom height is a key parameter for spray uniformity. If it is too low, it will lead to uneven spray dispersion [4,5] and can even cause destructive contact between the spray boom and crops [6]. If it is too high, it will lead to droplet drift [7,8,9]. Therefore, the detecting of the height variation between the spray boom and the crop canopy has become particularly important. This is the basis for a regulated spray boom height control system, and the detection accuracy directly affects the regulation performance of the control system. The study of boom height detection technology can provide accurate and effective detection input for spray boom height control systems and is a key for improving the spray quality of autonomous boom sprayers and pest control on unmanned farms.
The height of the spray boom refers to the distance from the spray boom to the top of the crop canopy. At present, the sensors for real-time detecting of the height of the spray boom and its own position mostly use laser sensors, angle sensors, infrared sensors, wire sensors, and contact sensors. Ultrasonic sensors, which are not equally affected when working in the field environment, offer different performance. Laser sensors have relatively fast data acquisition speeds [10], but their scattering properties are poor, and it is difficult to provide effective data for wheat with narrow leaves and irregular leaf surfaces [11]. Under indoor conditions, the straight-line characteristics of laser sensors perform better, and the measurement results are reliable. However, the conditions of use in the field environment are more stringent. Sudden changes in the crop canopy will reduce the accuracy of a LiDAR sensor [12]. Ground height estimation can fail when faced with dense plots without exposed soil [13], and LiDAR data require supporting processing software for subsequent data processing [14]. An angle sensor can be used to monitor the tilt angle of a spray boom or machine. It is usually installed at the bottom of the chassis center or the spray boom center as the basis for leveling the spray boom [15]. However, the angle sensor can only monitor the tilt angle of the spray boom relative to terrain changes. Based on the tilt angle of the spray boom itself, when the height of the canopy under the spray boom on both sides is different, the control system also needs to fuse the signal input of other distance sensors to achieve tilt profiling of the spray boom. By using an infrared sensor to observe the position of the nozzle boom, it can be found that the change is related to irregular ground [16], but an infrared sensor is sensitive to ambient light. In a field environment, sunlight and other heat sources can interfere with the measurement results of infrared sensors. A contact sensor can be installed under a spray boom through a mounting plate. When the height of the spray boom changes, the height contact rod will elastically deform [17]. Although this detection method is simple, the contact sensor can only use the field topographic change as the input. Because the height of the spray boom is adjusted, the change in the height of the canopy cannot be detected, and the growth characteristics of the crops being sprayed are isolated, which can damage the crops. For an ultrasonic sensor, the distance between the object and sensor is calculated based on the time elapsed from the transmitting signal to the receiving reflected signal and the known value of the sound speed in air. For the height detection of some crops, an ultrasonic sensor offers relatively good performance and correlation [18,19,20,21,22], and it is also the main sensor used to detect the height of the spray boom [12]. Ultrasonic sensors have the advantages of high repeatability detection accuracy in the same environment [23], are more user-friendly than LiDAR sensors [14] and are less expensive. Ultrasonic sensors have been used for different agricultural purposes [24] for a long time. However, when applied in the field, the echo energy and distance detection of ultrasonic sensors are still sensitive to the influence of factors such as the measured density, growth change, and crop growth conditions. Considering the influence of canopy density, some researchers have studied the relationship between the echo energy of ultrasonic sounding and crop canopy density to obtain information such as crop biomass and morphology [25,26,27,28]. For crop growth, some researchers have studied the relationship between the changes in crop morphological size and canopy structure under dynamic conditions, applying the detection of ultrasonic sensors to obtain control inputs and modify the target application rate in real time [29,30,31]. In response to changes in individual crop heights, some researchers have used data filtering methods such as crop height comparison and outlier clustering in the field to improve the stability of distance detection by ultrasonic sensors [32,33]. For the field wheat canopy, some researchers have investigated the variation characteristics of spray boom height based on ultrasonic sensing height information acquired at different positions of the spray boom. The K-means clustering algorithm has been used to improve the ultrasonic detection accuracy, which is an important aspect of a boom height automatic adjustment system. This provides a theoretical basis for the development of an automatic boom height adjustment system [34]. However, due to the irregular beam reflecting surface of a wheat canopy, an ultrasonic beam may detect the plant stalks and branches below the canopy, causing Hdbw to be greater than Habw, and when the wheat density is lower, the non-canopy results detected by the sensor are greater [35]. Different growth stages of wheat cause great differences in plant morphology and density, which makes this problem more prominent. It is difficult to guarantee the stability of detection accuracy using ultrasonic boom height detection.
In summary, ultrasonic detection technology has realized the real-time detection of crop information, but the detection accuracy is still low when repeated detection is performed during different crop growth stages. Current studies still lack consideration of the leaf morphology and plant information of crops in different growth stages. The effect of higher temperature on ultrasonic detection has become a bottleneck that restricts the application of ultrasonic sensors for accurate control. To address the above problems, a wheat height detection system was built based on an ultrasonic sensor, and field detection experiments during the six main growth stages of wheat were designed to investigate the detection variation patterns of the ultrasonic sensor under different growth stages and different Dd. An ultrasound-based field detection model for the full growth cycle of wheat was built, which provided reliable detection model support for the boom height control system.
2. Materials and Methods
2.1. Boom Height Detection System
A 3WSH-500 sprayer (YongJia, Shandong, China) with a spray width of 12 m was used in the test. The spray boom was divided into three parts: the left section, the middle section and the right section. The middle section is hinged to the sprayer through a four-link lifting mechanism. The height control of the entire section of the spray boom is realized through the action of an electronic push rod. A manual control module is installed in the cab of the sprayer, which can manually control the unfolding, folding and heightening of the spray boom.
To guide the boom sprayer, a boom height detection system was designed, which included a PC (Personal), a TTC32 vehicle control unit (HYDAC Technology, Shanghai, China), an STM32F103RCT6 microcontroller (STMicroelectronics, Shanghai, China), a GNSS antenna (TOPGNSS, ShenZhen, China), three ultrasonic sensors and a CAN data storage device (Guangcheng Technology Co., Ltd., ShenYang, China) (Figure 1). Each ultrasonic sensor (HC175F30GM-I-2000-V1, HC Sensors, ShenZhen, China) has a measuring range of 100 mm~2000 mm and a blind zone of 0~100 mm. The ultrasonic echo energy was reflected by an analog current of 4~20 mA. The three ultrasonic sensors were installed at the left, middle and right sections of the spray boom. The ultrasonic sensor on the middle spray boom was at the center of the middle section, the ultrasonic sensors at the spray booms on both sides were all 10 cm from the end, and the three ultrasonic sensors were all installed vertical to the ground to detect the height between the spray boom and the wheat. A GNSS antenna was installed at the top center of the sprayer to record the trajectory position of the test sample in the field.
During the test, the ultrasonic sensors at each section of the spray boom input real-time data to the TTC32 on-board control unit, and the real-time latitude and longitude information of the GNSS antenna was input to the STM32F103RCT6 microcontroller. At the same time, the TTC32 on-board control unit and the STM32F103RCT6 microcontroller could communicate in real time with the CAN data storage through the CAN bus. The ultrasonic detection of each section of the spray boom was stored in the SD card of the CAN data storage and was connected to the PC through a USB/PCAN. The real-time detection values and currents of the ultrasonic sensors at the three positions can be directly displayed on the CODESYS software interface of the PC. The pattern of the test data can be observed in real time. After the completion of the test, the SD card was imported into the computer for recording. The manual console can control the lifting and deployment of the spray boom through a knob.
2.2 Calibration Test of the Initial Detection Curve and Detection Range of the Ultrasonic Sensor
To obtain the relationship between the output current of the ultrasonic sensor and the actual measurement distance, the calibration of the initial detection curve of the ultrasonic sensor was performed on unobstructed open level ground (Figure 2). The distance between the ultrasonic sensor and the level ground was changed by adjusting the height of the lifting platform. The height adjustment range was 500~1400 mm with an interval of 100 mm. The ultrasonic sensor was installed vertically downward on the extending rod of the lifting platform, and the level ground was the detection object. The PC (Personal) was connected to the TTC32 vehicle control unit through the PCAN-USB. The CODESYS software interface on the PC was used to display the current signal output by the ultrasonic sensor at the current height in real time, and the actual height measured by a tape measure was recorded. The height measurement of each group was repeated three times. After the mean value was taken, the current input from the ultrasonic sensor was taken as the abscissa, the actual height from the bottom of the ultrasonic sensor to the actual height from the level ground was taken as the vertical axis, and the initial linear equation between the echo energy of the ultrasonic sensor and the detection height of the level ground was obtained.
To explore the beam width of the ultrasonic sensor under different Dd and obtain the effective detection range of the ultrasonic sensor, the linear relationship between the echo energy of the ultrasonic sensor calibrated on the level ground and the ground detection height was used as the detection input, and the measurement was performed in an obstacle-free environment. The ultrasonic sensor was tested on level ground (Figure 3). The blind zone of the ultrasonic sensor was 0~100 mm, and the detection range was 100 mm~2000 mm. Considering the working height range between the spray boom and the top of the wheat canopy during field operation, the minimum Dd of the ultrasonic sensor to the object to be measured was set to 200 mm, and the maximum Dd was set to 1800 mm. The lifting platform was repeated at least once at each height at an interval of 200 mm. The beam width of the ultrasonic sensor within the Dd range of 200~1800 mm was finally obtained. During the test, the measured object was a 25×25×150 mm cuboidal block. Before the test, the ultrasonic sensor was fixed vertically downward with its centerline perpendicular to the ground. The cuboid under test was placed on level ground, and the center point of its square surface overlapped with the center line of the ultrasonic sensor. To ensure the accuracy of the test, an engineering plumb bob was dropped from the center point of the bottom of the ultrasonic sensor to initially fix the square surface of the measured cuboid, and this point was used as the origin. After the positioning was complete, the plumb bob was removed, the current sensor detectoring value was recorded through the CODESYS software interface on the PC, and then the origin was moved vertically from the origin to one side. Every 25 mm of movement, the detecting value was compared to determine whether there was approximately 150 mm change, i.e., the change in wood height, until the detecting value of the ultrasonic sensor was switched to the ground surface, and the current point was set as the estimated point of the detection boundary under the current detection distance. In the next step, the measured rectangular parallelepiped moved toward the origin at an interval of 5 mm at the current estimated point until the detection value of the ultrasonic sensor repeatedly fluctuated between the measured object and the ground. Then, the distance between the current point and the origin was used as the boundary value.
In addition, to explore the differences among the same model of ultrasonic sensors, this paper analyzed the linear relationship between the output current of the ultrasonic sensors at the three positions on the spray boom and the detection distance and compared the values of the three ultrasonic sensors under the same current input. The purpose of measuring the difference in detection values was to verify whether the same model of sensors could use a unified linear relationship for distance detection.
2.3. Construction of a Field Detection Model of Spray Boom Height during the Wheat Growth Cycle
To investigate the effect of wheat in the field at different growth stages on the height from the ultrasonic detection boom to the top of the canopy, Jingdong 22 winter wheat was selected; the sowing rate was 225 kg/ha, and the planting time was October 20, 2022 (Beijing time). A field exploration test was conducted at the National Precision Agriculture Research Experimental Base (Beijing, China) using a 3.6-m-wide seeder (2BFX-24, ShiJiaZhuang Agriculture Machinery Co., Ltd, ShiJiaZhuang, China) (Figure 4). Six main growth stages of wheat were selected: the standing stage (2023.3.15~3.31), jointing stage (2023.4.1~4.15), booting stage (2023.4.15~2023.4.30), heading stage (2023.5.1~5.15), filling stage (2023.5.15~5.31) and maturity stage (2023.6.1~6.15). The adjustment range of the spray boom height was 450~1250 mm, with the interval of each adjustment ≤100 mm. After selecting a point in the field where wheat seedling emergence was uniform, the position was recorded with a GNSS antenna, and a 1×1 m box was placed. At the beginning of the test, the spray boom of the test prototype was unfolded so that the ultrasonic sensor at the middle section of the spray boom was perpendicular to the wheat canopy in the box, and the distance between the spray boom and the wheat tops was adjusted sequentially through the manual console in the cab. Through the CODESYS software interface, the Hdbw at each Dd was recorded, and a manual measurement with a tape measure was performed to obtain each Hdbw under Dd and the average value of wheat plant height (Hapw) in the box. During each wheat growth stage, two sets of data were collected. One set of data was used for model construction. These data contained at least nine boom height values for each stage. At the same position, the test was repeated three times for the ultrasonic sensors at the boom positions on both sides. Another set of data was used for model validation, and data were acquired once from at least nine boom heights for each stage.
To keep Hdbw consistent with Habw and improve the detection input accuracy of the spray boom height control system, the field boom height detection model was selected to construct the set of data; that is, the mathematical relationship between different Dd and the distance from the ultrasonic detection boom to the top of the wheat canopy during each growth stage was compared with the initial detection curve of the ultrasonic sensor under the level ground state to obtain the actual detection position of the wheat by the ultrasonic sensor.
For better mathematical analysis, the ultrasonic wheat position percent (UPP) is defined as:
where
Offset is the position distance of Hdbw compared to Habw, mm;
Hapw is the average plant height of wheat in the detection position box for each growth stage of wheat, mm;
The closer Upp is to 1, the closer the current detection location is to the top of the wheat canopy.
The Dd from the boom to the top of wheat is within the range of 450~1250 mm, and all the corresponding data are grouped according to the Upp range. Then, for each Dd in the same group, the corresponding Upp values were all within the same setting range (Upp ≥85% or Upp <85%), A value compensation was made for Hdbw in this group. The model was established based on the initial linear equations of the ultrasonic sensor under the level ground state. The equations were uniformly given different A values according to different groupings to establish an ultrasonic sensing-based detection model of wheat’s full-range spray boom height.
Furthermore, to the versatility of the model being reduced when the number of compensation values is too large, based on the obtained detection models, the detection ranges with close compensation values were merged according to the ranges of the compensation values, and the number of groups was reduced to facilitate the field application of the detection model. In the end, to ensure that the detection accuracy of the wheat full-range height detection model could maintain a high value during each growth stage of wheat, the detection model was validated. Using the collected validation group data, the current analog value in the validation data was imported into the model to obtain the compensated detection value of wheat height, which was compared with the actual recorded value to calculate the detection error and obtain the effective detection range and detection accuracy of the model.
3. Results
3.1 Initial Detection Curve and Detection Range Calibration Test Results of the Ultrasonic Sensor
The ultrasonic sensors installed at three positions of the spray boom were calibrated on level ground (Figure 5) to obtain the linear relationships y = 0.1158x - 328.65, y = 0.1196x - 393.14, and y = 0.1143x - 316.24, where x is the output current, μa, and y is the detection height mm. The R2 of goodness-of-fit were 0.9995, 0.9998, and 0.9999, respectively. This shows that there is a significant correlation between the current on the horizontal axis and the height on the vertical axis. In the figure, Sensor 1, Sensor 2 and Sensor 3 are the ultrasonic sensors installed at the three positions on the spray boom.
The ultrasonic sensor was tested on a cuboid of 25×25×150 mm on unobstructed level ground, and the beam width under different Dd are shown in Figure 6.
In Figure 6, the horizontal axis is Dd, which is the distance between the center of the bottom of the sensor and the center of the object to be measured, and the vertical axis is the unilateral beam width of the ultrasonic sensor at each Dd. Since the ultrasonic beam is symmetric about the centerline, the filled area in Figure 6 is half the ultrasonic detection range.
As shown in Figure 6, when the Dd between the ultrasonic sensor and object is in the range of 200~1000 mm, the vertical axis shows a slowly rising trend, and the unilateral beam width gradually increases from 114 mm to 146 mm. When the range of Dd is 1000~1800 mm, the vertical axis shows a rapid decreasing trend, and the unilateral beam width decreases rapidly from 146 mm to 36 mm. According to the test results, in the range of Dd is 200 mm~1800 mm , the variation pattern of the unilateral beam width of the ultrasonic sensor increased first and then decreased; the unilateral beam width of the ultrasonic sensor reached the peak value of 146 mm when Dd was 1000 mm and reached the minimum value of 36 mm when Dd was 1800 mm.
Through the previous calibration of the ultrasonic sensors at three positions on the spray boom in the level ground, the linear relationship between the output currents of the three ultrasonic sensors and Dd was obtained. To explore the individual differences among the ultrasonic sensors of the same type, the same current was used. The values were introduced into three linear relationships x to obtain the detecting values of the same model of ultrasonic sensors under the same current output (Table 1). As shown in Table 1, when the output current of the ultrasonic sensor is at the maximum value of 20000 µA, the difference of the detected values reaches the maximum of 59 mm. Considering that the actual current range when ultrasound is used to detect the spray boom height is generally between 6000 µA and 12000 µA, the maximum detecting difference within this range is only 19 mm. This shows that for the same type of ultrasonic sensors within the range of spray boom heights Dd, the difference in the detecting values was very small. Therefore, after comparing the closeness of the three linear relationships, we fused the scattered relationship between the output current of the three ultrasonic sensors and the Dd (Figure 7) and obtained the unified linear relationship y=0.1164x-334.88; the R2 of the goodness-of-fit was 0.9991, which indicated that the fused ultrasonic output current had a significant correlation with the Dd.
The current value of 4000~20000 µA is the output current range of the ultrasonic sensor, and Sensor 1, Sensor 2 and Sensor 3 indicate the ultrasonic sensors installed at the three positions on the spray boom.
To verify that the unified linear relationship after fusion is suitable for the height detection of the same type of ultrasonic sensors, the current values in Table 1 were substituted into the unified linear relationship x, and the obtained detection value y was compared with the detection values of the three ultrasonic sensors (Table 2). When the current is the maximum value of 20000 µA, the detection difference reaches the maximum of 36 mm, and the minimum difference is 6 mm. In the actual detection current range of wheat height detection of 6000~12000 μA, the corresponding detection difference was a maximum of 10 mm, and the minimum difference was 0 mm. This shows that for wheat height detection, the same type of ultrasonic sensors can share a linear relationship and could meet the requirements of the test.
3.2 Results of the Field Spray Boom Height Detection Test
In the field detection experiment, the heights of wheat at fixed positions in the field were detected during the six wheat growth stages, and the position estimates of ultrasonic detection under multiple Dd were obtained (Table 3, Table 4 and Table 5). In the tables, S2 is the ultrasonic sensors mounted on middle part of the spray boom, S1 and S3 are the ultrasonic sensors mounted on both sides of the spray boom, and P1~P6 are the six growth stages of wheat: standing, jointing, booting, heading, filling, and maturity.
In the above table3 to table5, Hdbw was the detected value of the height from the spray boom to the top of the wheat, which was obtained from the initial detection curve of the ultrasonic sensor. Habw was the actual height from the spray boom to the top of the wheat, which was obtained from manual measurement. It was found by comparing Hdbw and Habw that the Hdbw values were all greater than the Habw values. This indicates that there were differences when the ultrasonic sensor detects the height of the land and the top of the wheat. The actual detection position of the detecting value from the ultrasonic sensor was under the wheat top, not the position at the wheat top. The offset of the detection position of the ultrasonic sensor can be obtained by comparing the difference between Hdbw and Habw, which represents the offset of the detection position of the ultrasonic sensor relative to the top position of the wheat. The maximum offsets between the standing stage and maturity stage of wheat were 113 mm, 295 mm, 400 mm, 296 mm, 511 mm, and 452 mm. The Hapw of wheat was measured manually with a tape measure. The Hapw values of wheat in the box under the ultrasonic sensor in the middle section were 120 mm, 393 mm, 528 mm, 552 mm, 568 mm, and 654 mm from the standing stage to the maturity stage, respectively. Upp represents the degree to which the detection position of the ultrasonic sensor is close to the top of the wheat, and the larger this value is, the closer the ultrasonic detection position is to the top of the wheat.
Based on the variation pattern of Upp corresponding to different Dd during the same growth stage of wheat, when the ultrasonic sensor was within 450 ~1000 mm from the top of wheat Dd, the detection position corresponding to Hdbw was related to the change in Dd, showing a clear variation pattern. Within the range of Dd, the maximum offsets of Hdbw were 33 mm, 79 mm, 101 mm, 102 mm, 125 mm, and 191 mm. As Dd from the ultrasonic sensor to the top of the wheat increased, the offset of its Hdbw gradually increased, and Upp decreased accordingly. This means that the detection position of the ultrasonic sensor gradually moved downward toward the wheat root. In contrast, when Dd was smaller in this range, the offset of Hdbw was smaller and the detection position was closer to the top of the wheat. When the distance between the ultrasonic sensor and the wheat top Dd was greater than 1000 mm, Upp fluctuated significantly. Hdbw was unstable and changed irregularly, and the ultrasonic detection position was mostly close to the wheat roots. Upp only represents the extent to which the detection position is close to the top of wheat when the initial curve of the ultrasonic sensor after level calibration is used to detect the height of wheat, and it cannot represent the detection accuracy of the ultrasonic sensor.
In the construction data of the spray boom height detection model in the field, the variation pattern of individual Hdbw did not match the overall pattern (data underlined). For example, during the jointing stage, when Dd was 964 mm, the offset of Hdbw should be gradually increased, at least greater than the 72 mm corresponding to the previous Dd (895 mm), and its Upp should gradually decrease and be at least less than 83.89% of the previous Dd (895 mm), but this Dd actually corresponds to a offset of 31 mm, and Upp was 93.06%. Although this is good detection performance, it is still a very rare individual phenomenon. It should also be noted that because the height adjustment range of the spray boom is limited by its own structure, when the wheat plant height gradually increases, the maximum detection distance between the ultrasonic sensor and the top of the wheat gradually decreases; during the wheat maturity stage, the wheat plant height is above 600 mm, and the maximum Dd between the ultrasonic sensor and the top of the wheat is 1049 mm.
Based on the Dd within the same range of Upp in different growth stages, when Upp is above 85 %, the corresponding Dd was in the range of 450~701 mm during the standing stage. From the jointing stage to the maturity stage, the range of Dd corresponding to Upp above 85% expanded to approximately 450~850mm, and Upp corresponding to a Dd of 450~850 mm reached more than 90%, in the maturity stage.
3.2.1. Construction of the Detection Model
As shown from the results in Table 3, Table 4 and Table 5, when Upp >98%, the difference between the corresponding Hdbw and Habw is very small, and the detection position is very close to the top of the wheat. By formula (1), can be obtained when the Upp is 98%,the offset of the middle ultrasonic sensor during the six growth stages of wheat were 2.4 mm, 7.86 mm, 10.56 mm, 11.04 mm, 11.36 mm, and 13.08 mm, respectively. Therefore, when the position percentage was greater than 98%, the detection position was considered at the top of the wheat. No compensation was performed for the ultrasound initial calibration curve. When the distance between the ultrasonic sensor and the top of wheat was Dd ≥1000 mm, the downward movement distance of the ultrasonic sensor was irregular, and the position percentage was unstable. To ensure the accuracy of the established wheat detection model, when Dd ≥1000 mm (Upp ≤70%), no compensation was performed to the ultrasound initial calibration curve, and the applicable range of the model was preliminarily set to be within the detection distance of 450~1000 mm.
In Table 3, Table 4 and Table 5, all the data within the range of 450 mm to 1000 mm between the ultrasonic sensor and the top of the wheat were divided into two groups according to Upp ranges of 85%~98% and 70%~84%. The grouping results are shown in Table 6.
As shown in Table 6, the values from the standing stage to the maturity stage were divided into 12 groups. The mean value of the offset for each group was used as the compensation value A to establish a preliminary model for wheat full-range detection (Table 7).

Table 7.
Preliminary model of boom height detection.
| Model equation | Compensation value/mm | Applicable scope | |
|---|---|---|---|
| Dd/mm | Stage | ||
| y = 0.1164x - 334.88+A | 13.85 | 450~701 | Standing |
| 26 | 734~961 | ||
| 27.75 | 450~850 | Jointing | |
| 70 | 864~973 | ||
| 40.58 | 450~858 | Booting | |
| 89.86 | 869~991 | ||
| 46.44 | 450~850 | Heading | |
| 91.86 | 860~951 | ||
| 47.53 | 450~867 | Filling | |
| 109.5 | 880~1000 | ||
| 36.88 | 450~850 | Maturity | |
| 120.75 | 860~966 | ||
The preliminary model equation for boom height detection is:
y = 0.1164x - 334.88+A
where
y is Hdbw, mm;
x is the ultrasonic sensor output current, μA;
A is the detection compensation value, mm;
The preliminary model for boom height detection is limited by the different growth stages and Dd of wheat and lacks versatility in the whole growth cycle of wheat. Due to the large number of compensation A values, it is cumbersome to replace the values in the application of the model. To reduce the limitations of the model, it is necessary to expand the versatility of the model between the wheat standing stage and the wheat maturity stage and to make the application of the full-range wheat detection model more convenient and faster. The merged model of wheat full-range detection was obtained by merging the compensation A values in the model equations, as shown in Table 8.
As shown in Table 7, the two groups of compensation values A of the preliminary model for boom height detection during the wheat standing stage were 13.85 mm and 26 mm, respectively; the detection compensation values of the two groups were both relatively small; within the Dd of 450~1000 mm, the compensation difference A was only 12.15 mm, the two groups of wheat standing stages were merged into one group, the detection distance range was expanded to 450~1000 mm, and the corresponding compensation value A was the mean value of the two groups of compensation values, which was 19.18 mm. Table 6 shows that the boundary values of the Dd range between the two groups of wheat jointing stages to the wheat maturity stages were very close. The left end boundary values of the first set of Dd ranges were 450mm at each growth stage of wheat, and the right end boundary values were 850 mm, 858 mm, 850 mm, 867 mm, 850 mm, according to the stage of wheat growth. The compensation values of the first group from the standing stage to the maturity stage were 27.75 mm, 40.58 mm, 46.44 mm, 47.53 mm, and 36.88 mm, respectively, with a maximum difference of 19.78 mm. There is no need to give compensation values separately. Therefore, the first group of wheat samples from the standing stage to the maturity stage were merged. The Dd range of the first group after merging is 450~850 mm. The compensation value is the average of the compensation values of the first group for the stages before the merging, 39.84 mm. The merge method of the second group was the same as that of the first group. The difference between the compensation values between the two groups was the maximum at 50.75 mm between the standing stage and the maturity stage. In the higher range of Dd, 50.75 mm was not a large value. The range of Dd for the second group after merging was 851~1000 mm, and the compensation value was the mean value of the second group of compensation values in each stage before merging, 96.39 mm.
The boundary values of the two groups of Dd ranges for the preliminary model were not continuous. This is because in the field exploration experiments, the Dd between the spray boom and the wheat top was adjusted at an interval of ≤100 mm, not at a fixed value as the interval. In the practical application of the preliminary model, it may occur that some Dd is in the adjustment interval, and there is no corresponding compensation value. For example, at the jointing stage of wheat, the user set Dd to be 860mm to detect wheat, but Dd is 860mm, which is neither within the range of 450mm-850mm in the first group of Dd at the jointing stage of the preliminary model, nor within the range of 864mm-973mm in the second group of Dd.Therefore, there is no corresponding compensation value for Dd = 860mm, resulting in the inapplicability of the preliminary model. To improve the continuity of the model, the adjacent boundary values of the two groups of Dd ranges in the boom height merged model were continuous, ensuring that within the use range of the model, each detection distance can be given a compensation value.
3.2.2. Validation and Optimization Results of the Spray Boom Height Detection Model
Compared with the preliminary model, the merged model of boom height detection simplifies the number of equations to compensate for the A values and improves the versatility of the model during the full growth cycle of wheat. However, as the detection model is the regulation basis of the control system, its detection accuracy is very important. Therefore, validating the detection model is essential. The field validation data reserved for each growth stage of wheat were introduced into the preliminary model and the merged model to compare the variation pattern of the detection error. The model was optimized, and the validation results are shown in Table 9.
In Table 9, Habw was obtained through manual measurement with a tape measure. The output current of the ultrasonic sensor in the verification data was introduced into the equations of the preliminary detection model and the merged detection model to obtain Hdbw1 and Hdbw2. The detection error and average detection error of the preliminary detection model were Ev1 and Aev1, respectively; the detection error and average detection error of the merged detection model were Ev2 and Aev2, respectively.
The maximum detection errors of the preliminary detection model in the six growth stages of wheat were 30mm, 60mm, 57mm, 49mm, 85mm, and 62mm, respectively.These maximum errors occurred when Dd > 950mm. The maximum errors of the merged detection model in the six growth stages of wheat were 24mm, 34mm, 51mm, 53mm, 72mm and 37mm, respectively. These errors also appeared in the case of Dd > 950mm. In the case of Dd ≤ 950mm, the maximum errors of the preliminary detection model and the merged detection model in the six growth stages of wheat were 53mm and 42mm, respectively. The average error of the two detection models was less than 30 mm, and the average error of the merged detection model was better than that of the initial detection model in the six growth stages of wheat.In order to ensure the detection accuracy of the model and reduce the influence of Dd on the detection model, the merged detection model is further optimized, and the applicable Dd range of the detection model is determined to be 450mm ~ 950mm. In the field detection test, the data of 950mm ≤ Dd < 1000mm is still valuable for the determination of the compensation value of the detection model. Therefore, the compensation value of the optimized boom height detection model remains unchanged, and the maximum applicable Dd range of the model is changed from 1000mm to 950mm, as shown in Table 10.
The boom height detection model has three fixed values during the six wheat growth stages. The applicable Dd of the model was within the range of 450~950 mm. According to the validation results of the model, the detection error of the model was ≤5 cm within the applicable detection distance. This can provide effective and accurate detection input for wheat from the standing stage to the maturity stage.
4 Discussion
4.1. The Distance between the Ultrasonic Sensor and the Wheat Canopy within a Certain Range Can Guarantee the Detection Accuracy
Field exploration tests conducted during six different wheat stages showed that the Hdbw of the ultrasonic sensor was greater than the Habw under multiple Dd, indicating that the detection position corresponding to Hdbw was below the canopy. Zhao and Zhai [35] also reached the same result when detecting the height of the wheat canopy. They suggested that for the thin and narrow leaf characteristics of wheat, the canopy was an irregular reflection of ultrasonic energy. The ultrasound beam may detect other objects, such as branches below the canopy, causing Hdbw >Habw. To obtain a more accurate canopy height, the values detected by the ultrasonic sensor should be corrected. For this reason, researchers have proposed a method of best height estimation percentile, which can better indicate the positional relationship between Hdbw and Habw. For example, Scotford and Miller et al. [36] proposed that 90% of the detection data could be used as the best estimate of the height of wheat plants. Bronson et al. [21] suggested that for the height detection of cotton, the 75 percentile of the detection data have better accuracy than the mean or median. However, whether this is applicable to wheat leaves still needs further study. According to the field exploration test carried out on wheat crops in the present study, the offset amount of Hdbw under different Dd was different; the higher the distance between the spray boom and the canopy top was, the closer the corresponding position of Hdbw was to the wheat roots. Therefore, the height estimate percentile can provide a better height estimate within the lower range of Dd, but under the higher Dd range, the fixed height estimate percentile is not necessarily suitable, and its accuracy is affected by variations in Dd.
Through the detection of cuboids on level ground, it is found that the unilateral beam widths of an ultrasonic sensor gradually increases within the Dd range of 200~1000 mm and rapidly decreases within the Dd range of 1000~1800 mm. When detecting wheat height in the field, it was found that when the ultrasonic sensor was in the range of Dd 450~1000 mm, there was a clear variation pattern between the position corresponding to Hdbw and Dd; however, as Dd gradually increased ≥ 1000 mm, Hdbw fluctuated greatly. A comparison of the detection results in the level ground and the field shows that when Dd is within 200~1000 mm, the lower Dd is, the more concentrated the ultrasonic echo energy, and therefore, a smaller analyte can still provide effective detection values. When Dd is larger, the ultrasonic divergence angle and field of view are larger, which reduces the detection accuracy of the ultrasonic sensor [37]. When Dd increases, the number of wheat leaves within the range of the ultrasonic divergence angle increases correspondingly, and the size of wheat leaves increases. The morphology becomes complicated, and it is difficult to provide a stable ultrasonic energy reflecting surface. Considering that the ultrasonic sensor may be affected by attenuation, scattering and other interferences during propagation, the possibility of interference is more likely when Dd is longer, and the ultrasonic waves may even be reflected or scattered by the wheat leaves multiple times, resulting in a larger signal fluctuation. Therefore, according to the variation pattern of the detection position under different Dd, the Hdbw within the range of different detection Dd was revised separately to more accurately estimate Habw and improve the detection accuracy. For a larger Dd, no compensation was made. The optimal Dd range for the model was set.
4.2 Effects of Different Wheat Growth Stages on the Detection of the Location of Wheat in the Field by the Ultrasonic Sensor
This paper used an accurate and nondestructive test method to detect the height of wheat during its six growth stages in a field exploration test. The effects of changes in leaf spatial morphology, plant height, and canopy density during the growth process of wheat on detection by ultrasonic sensors were obtained. From the perspective of Upp, during the different growth stages of wheat, the corresponding range of Dd within the same Upp range gradually increased. At the standing stage, the range of Dd corresponding to Upp above 85% was 450~701 mm. From the jointing stage to the maturity stage, the range of Dd corresponding to Upp above 85% expanded to 450~850 mm, indicating that with the extension of the wheat growth cycle, the Dd corresponding to the same UPP began to expand. The effect of the change in Dd on the ultrasonic detection position gradually decreased with the prolongation of the growth cycle. From the perspective of Dd, during the wheat maturity stage, the UPP corresponding to the Dd range of 450~850 mm increased to 90%, indicating that the ultrasonic detection position was closer to the top of the wheat. Considering that during the growth of wheat, Hapw in the box at the fixed position detected in the field exploration experiment gradually increased, while the number of wheat plants in the box remained unchanged, the change in Hapw caused the wheat canopy to gradually change from sparse to dense, which is the reason why Hdbw and Habw gradually approached each other as the growth cycle lengthened. Regarding the effect of canopy density on the ultrasonic sensor, Zhao and Zhai et al. [35] obtained the change in wheat canopy density by four different degrees of pruning of wheat branches and leaves and detected the variation in wheat canopy with different densities. Their results showed that as the canopy density decreased, the Hdbw offset increased, and the ultrasonic sensor detected more non-canopy results. Otherwise, the canopy density increased, and the sensor detected more canopy results. This test method was consistent with the results obtained in the present study at different growth stages of wheat in the field. However, destructive pruning of the wheat canopy was performed, and the leaf morphological changes in different growth stages of wheat were ignored, especially leaf morphological changes before and after the heading stage. Although the specific value of canopy density obtained by weighing the weight of branches and leaves could reflect the difference in canopy density, it changed the original variation pattern of wheat growth.
From the perspective of Hdbw offset, the offset of wheat in the later stages was significantly larger than that in the early stages, but this does not mean that the Hdbw position offset of the ultrasonic sensor gradually increased with the increase in the wheat growth cycle. This result might be because the plant height of wheat in the early stages was much shorter than that in the later stages. During the standing stage, wheat Hapw was between 110 mm and 140 mm. The offset of Hdbw was always <140 mm even if the detection position of the ultrasonic sensor was at the wheat root. In the latter stages of wheat growth, the wheat plant height was approximately 500~700 mm. The offset was greater than 140 mm even if the detection position was in the upper-middle region of the wheat. Therefore, it is very important to consider the variation in crop height when analyzing the offset of detection values in different growth stages of wheat.
5. Conclusions
- (1)
- The ultrasonic sensor detects the wheat canopy, and its detection position is actually under the canopy. If Hdbw is directly used as the control input of the spraying operation, it will lead to a large detection position offset, and the offset of Hdbw can reach 191 mm when Dd is in the range of 450~1000 mm.
- (2)
- When the Dd of the ultrasonic sensor is within 450~1000 mm, the larger the Dd is, the closer the detection position is to the root of wheat, and vice versa, the closer to the top of wheat. When the detection distance was more than 1000 mm, the detection value fluctuated violently, the position offset reached a maximum of 511 mm, and the detection results were mostly concentrated near the wheat roots. Therefore, when the detection distance is greater than 1000 mm, it is not suitable for the height detection of wheat.
- (3)
- Different growth stages of wheat also affect detection by the ultrasonic sensor. During the standing stage, the Dd range had a higher Upp only in the range of 450~701 mm (Upp ≥85%), which means that only when Dd is in this range can the detection position corresponding to Hdbw be close to the top of the wheat. However, as the wheat growth cycle extends, Hdbw can also have a higher Upp in the larger Dd range of 450~850 mm. Even at the maturity stages, Upp corresponding to Dd in the range of 450~850 mm were both ≥90%.
- (4)
- This study obtained detection compensation values considering different wheat growth stages and different detection heights. Based on the compensation values, a wheat full-range detection model was established, the model was validated and optimized, and the applicable range Dd of the model was determined to be 450~950 mm, and the error of the optimized model was <5 cm.
Author Contributions
Conceptualization, C.Z. (Changyuan Zhai) and J.W.(JianGuo Wu); Methodology, J.W.(JianGuo Wu), S.Y. (Shuo Yang), C.Z. (Changyuan Zhai); Validation, S.Y. (Shuo Yang); Formal analyses, S.Y. (Shuo Yang), C.L.(Chengqian Li); Investigation, J.W., C.L., X.P., X.W., X.Z.; Resources, C.Z. (Changyuan Zhai), S.Y. (Shuo Yang); Data curation, J.W., Y.G.; Writing—original draft: J.W.(JianGuo Wu); Writing—review & editing, C.Z. (Changyuan Zhai), S.Y. (Shuo Yang); Funding acquisition, C.Z. (Changyuan Zhai), S.Y. (Shuo Yang), X.W.(Xiu Wang); Supervision. , C.Z. (Changyuan Zhai), S.Y. (Shuo Yang). All authors have read and agreed to the published version of the manuscript.
Funding
The support was provided by (1) Research and Application of Key Technologies for Intelligent Farming Decision Platform, An Open Competition Project of Heilongjiang Province, China (grant number: 2021ZXJ05A03); (2) National Natural Science Foundation of China (grant number: 32201661); (3) Youth Science Foundation of Beijing Academy of Agricultural and Forestry Sciences (grant number: QNJJ202210); (4) the Jiangsu Province and Education Ministry Cosponsored Synergistic Innovation Center of Modern Agricultural Equipment (grant number: XTCX1002).
Institutional Review Board Statement
Not applicable.
Data Availability Statement
The data presented in this study are available on request from the corresponding author.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Luo,X.W., Liao,J., Hu,L., Zhou, Z.Y., Zhang, Z.G., Zang, Y., et al.(2021).Research Progress of Intelligent Agricultural Machinery in China and Practice of Unmanned Farming Fields. South China Agricultural University Journal.42(06):8-17+5. [CrossRef]
- Li,D.L.,and Li,Z.(2020).Analysis and Development Prospects of Unmanned Farming Systems.Journalof Agricultural Machinery.51(07):1-12. [CrossRef]
- Zhao,C.J.(2021).Current Development and Future Prospects of Smart Agriculture.South China Agricultural University Journal.42(06):1-7. [CrossRef]
- Speelman, L.,and Jansen, J. W. (1974). The effect of spray-boom movement on the liquid distribution of field crop sprayers. J. Agric. Eng.Res.19(2), 117-129. [CrossRef]
- Ramon, H., De Baerdemaeker, J. (1997). Spray boom motions and spray distribution: Part 1, derivation of a mathematical relation. J. Agric. Eng. Res. 66(1), 23-29. [CrossRef]
- Griffith, J., Strelioff, B., and Schnaider, J. (2012). The Hockley Index. ASABE Annual International Meeting . 2012(2),1325-1332. [CrossRef]
- Holterman, H. J., van de Zande, J. C., Porskamp, H. A., and Huijsmans, J. F. (1997). Modelling spray drift from boom sprayers. Comput. Electron. Agric. 19(1), 1-22. [CrossRef]
- Nuyttens, D., De Schampheleire, M., Baetens, K., and Sonck, B. (2007). The influence of operator-controlled variables on spray drift from field crop sprayers. Trans. ASABE, 50(4), 1129-1140. [CrossRef]
- Baetens, K., Ho, Q. T., Nuyttens, D., De Schampheleire, M., Endalew, A. M., Hertog, M. L.,et al.(2009). A validated 2-D diffusion-advection model for prediction of drift from ground boom sprayers. Atmos. Environ., 43(9), 1674-1682. [CrossRef]
- Tumbo, S.D., Salyani, M., Whitney, J.D., Wheaton, T.A.,and Miller, W.M.(2002). Investigation of laser and ultrasonic ranging sensors for measurements of citrus canopy volume. Appl. Eng. Agric 18, 367–372. [CrossRef]
- Ehlert, D., Adamek, R.,and Horn, H. J. (2009) .Laser rangefinder-based measuring of crop biomass under field conditions. Precision Agriculture.10(5), 395–408. [CrossRef]
- Dou, H.J., Wang, S.L., Zhai, C.Y., Chen, L.P., Wang, X., and Zhao, X.G.(2021). A 1idar sensor based spray boom height detection method and the corresponding experimenta1 va1idation. Sensors 21 (6), 2107. [CrossRef]
- Jimenez-Berni, J. A., Deery, D. M., Rozas-Larraondo, P., Condon, A. G., Rebetzke, G. J., James, R. A., et al. (2018). High throughput determination of plant height, ground cover, and above-ground biomass in wheat with LiDAR. Front. Plant Sci. 9. [CrossRef]
- Llorens, J.,Gil, E.,Llop, J., and Escolà, A.(2011).Ultrasonic and LIDAR Sensors for Electronic Canopy Characterization in Vineyards: Advances to Improve Pesticide Application Methods. Sensors .11(2), 2177-2194. [CrossRef]
- Cui, L.F., Xue, X.Y., Ding, S.M., and Le, F.X.(2019b). Development of a DSP-based electronic control system for the active spray boom suspension. Comput. Electron. Agric 166, 1–9. [CrossRef]
- Sinfort, c., A.Miralles, F.Sevila and G.M.Maniere .(1994). Study and development of a test method for spray boom suspensions. J.Agr. Eng Res.59(4), 245-252. [CrossRef]
- Wang,S.L.,Zhao,C.J.,and Wang,X.(2014).Design and test of boom height adjustment system.J. Agric Mechanization Res.36(08),161-164+173. [CrossRef]
- Pittman, J.J., Arnall, D.B., Interrante, S.M., Moffet, C.A.,and Butler, T.J.(2015). Estimation of biomass and canopy height in bermudagrass, alfalfa, and wheat using ultrasonic, laser, and spectral sensors. Sensors . 15(2), 2920–2943. [CrossRef]
- Barmeier, G., Mistele, B.,and Schmidhalter, U.(2016). Referencing laser and ultrasonic height measurements of barleycultivars by using a herbometre as standard. Crop. Pasture Sci. 67(12), 1215–1222. [CrossRef]
- Chang, Y.K., Zaman, Q.U., Rehman, T.U., Farooque, A.A., Esau, T., and Jameel, M.W.(2017) .A real-time ultrasonic system to measure wild blueberry plant height during harvesting. Biosyst. Eng. 157, 35–44. [CrossRef]
- Bronson, K.F., French, A.N., Conley, M.M., and Barnes, E.M.(2021). Use of an ultrasonic sensor for plant height estimation in irrigated cotton. Agron. J. 113 (2), 2175–2183. [CrossRef]
- Farooque, A.A.,Chang, Y.K.,Zaman, Q.U.,Groulx, D.,Schumann, A.W.,Esau, T.J.,et al.(2013).Performance evaluation of multiple ground based sensors mounted on a commercial wild blueberry harvester to sense plant height, fruit yield and topographic features in real-time. Comput. Electron. Agric. 91(2), 135–144 . [CrossRef]
- Schumann, A.W.,and Zaman, Q.U. (2005).Software Development for Real-Time Ultrasonic Mapping of Tree Canopy Size. Comput. Electron. Agr. 47(1), 25-40. [CrossRef]
- Planas, S., Rosell, J.R., Pomar, J., Camp, F., Solanelles, F., Gràcia, F., et al. (2011). Performance of an ultrasonic ranging sensor in apple tree canopies. Sensors.11(3), 2459–2477. [CrossRef]
- Zaman, Q.U., Salyani, M., Zaman, Q.U., and Salyani, M.( 2004). Effects of foliage density and ground speed on ultrasonic measurement of citrus tree volume. Appl. Eng. Agric. 20(2), 173–17. [CrossRef]
- Aziz, S. A., Steward, B. L., Birrell, S. J., Kaspar, T. C., and Shrestha, D. S. (2004). Ultrasonic sensing for corn plant canopy characterization. American Soc. Agri. Biol. Eng., 041120. [CrossRef]
- Li, H.Z., Zhai, C.Y., Weckler, P., Wang, N., Yang, S.,and Zhang, B. (2017).A Canopy Density Model for Planar Orchard Target Detection Based on Ultrasonic Sensors. Sensors . 17(1), 31. [CrossRef]
- Nan, Y.L., Zhang, H.C., Zheng, J.Q., Bian, L.M., Li, Y.X., Yang, Y., et al. (2019). Estimating leaf area density of Osmanthus trees using ultrasonic sensing. Biosystems Engineering, 186, 60-70. [CrossRef]
- Gil, E., Escolà, A., Rosell, J. R., Planas, S., and Val, L. (2007). Variable rate application of plant protection products in vineyard using ultrasonic sensors. Crop Protection.26(8), 1287–1297. [CrossRef]
- Maghsoudi, H., Minaei, S., Ghobadian, B., and Masoudi, H. (2015). Ultrasonic sensing of pistachio canopy for low-volume precision spraying. Comput. Electron. Agric. 112 (Sp. Iss. SI), 149–160. [CrossRef]
- Zhou, H.T., Jia, W.D., Li.,Y., and Ou, M.X. (2021). Method for estimating canopy thickness using ultrasonic sensor technology. Agriculture .11(10),1011. [CrossRef]
- Andújar, D., Weis, M.,and Gerhards, R.(2012). An Ultrasonic System for Weed Detection in Cereal Crops. Sensors.12, 17343-17357. [CrossRef]
- Li, B.,Bai X.H.,and Li, Y.K.(2020). A crop canopy localization method based on ultrasonic ranging and iterative self-organizing data analysis technique algorithm. Sensors .20 (3), 818. [CrossRef]
- Dou,H.J.,Zhai,C.Y.,Chen, L.P.,Wang,S.L.,and Wang, X. (2021b). Field variation characteristics of sprayer boom height using a newly designed boom height detection system. IEEE Access .9, 17148–17160. [CrossRef]
- Zhao, X.G., Zhai, C.Y., Wang, S.L., Dou, H.J.,Yang, S.,Wang, X.et al.(2022). Sprayer boom height measurement in wheat field using ultrasonic sensor: An exploratory study. Front Plant Sci. 13,1008122. Published 2022 Nov 22. [CrossRef]
- Scotford, I.M., and Miller, P.C.H. (2004). Combination of Spectral Reflectance and Ultrasonic Sensing to monitor the Growth of Winter Wheat. Biosystems Engineering. 87(1), 27–38. [CrossRef]
- Wei, J.,and Salyani, M.(2004) .Development of a Laser Scanner for Measuring Tree Canopy Characteristics: Phase 1. Prototype Development. Trans. ASAE , 47(6), 2101-2107. [CrossRef]
Figure 1.
Boom height detection system.
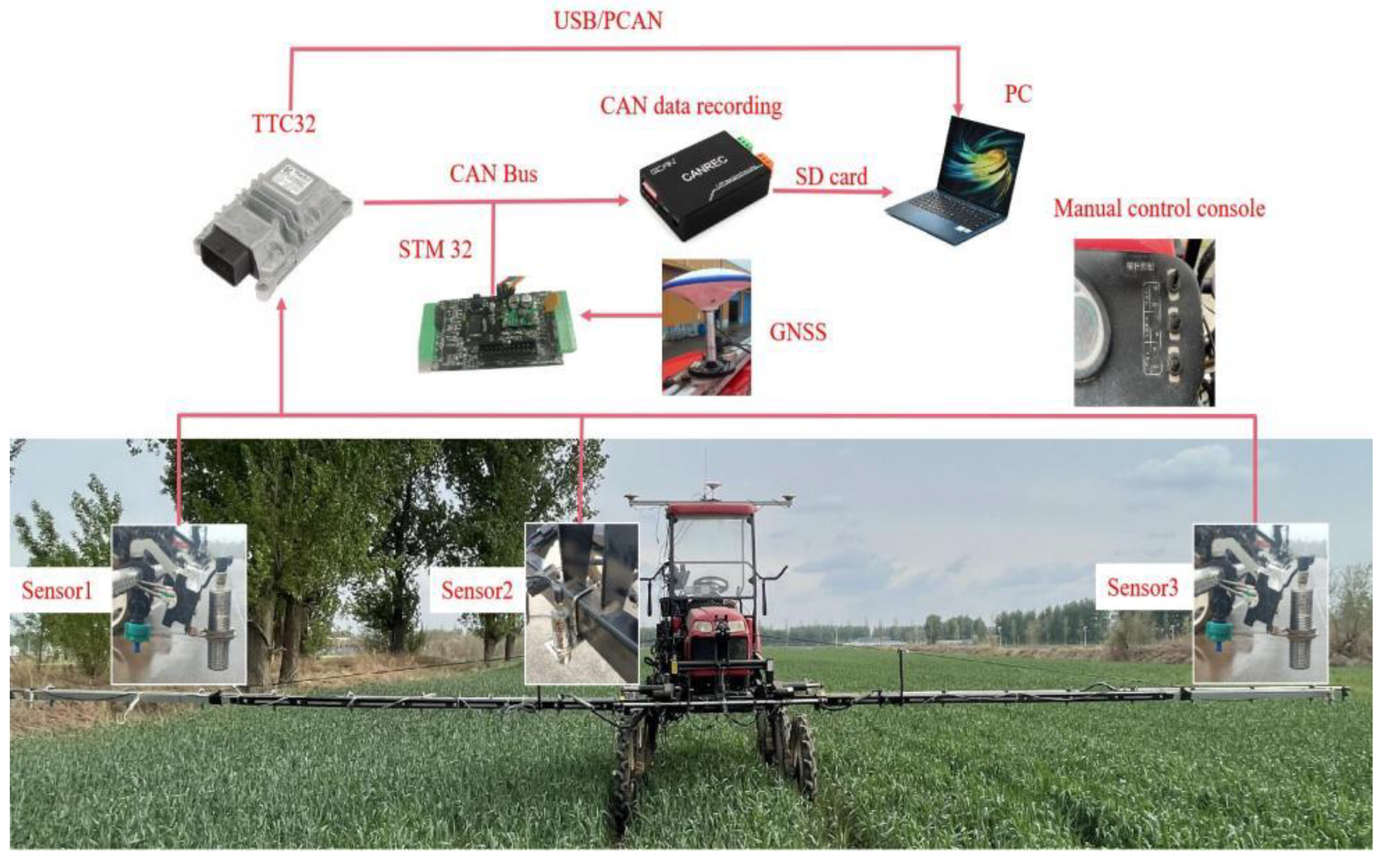
Figure 2.
Ultrasonic sensor initial detection curve calibration.
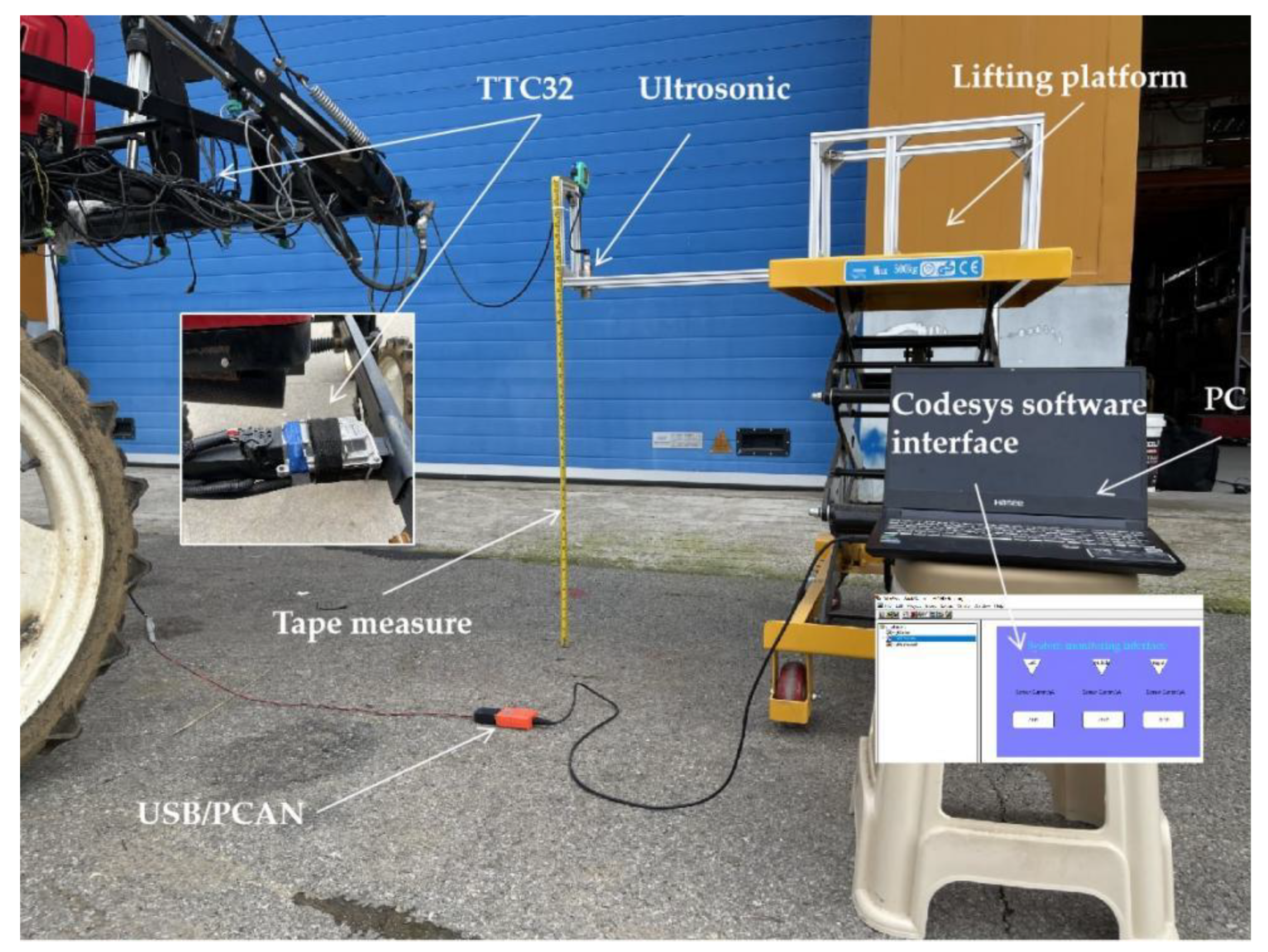
Figure 3.
Ultrasonic sensor detection range calibration test.
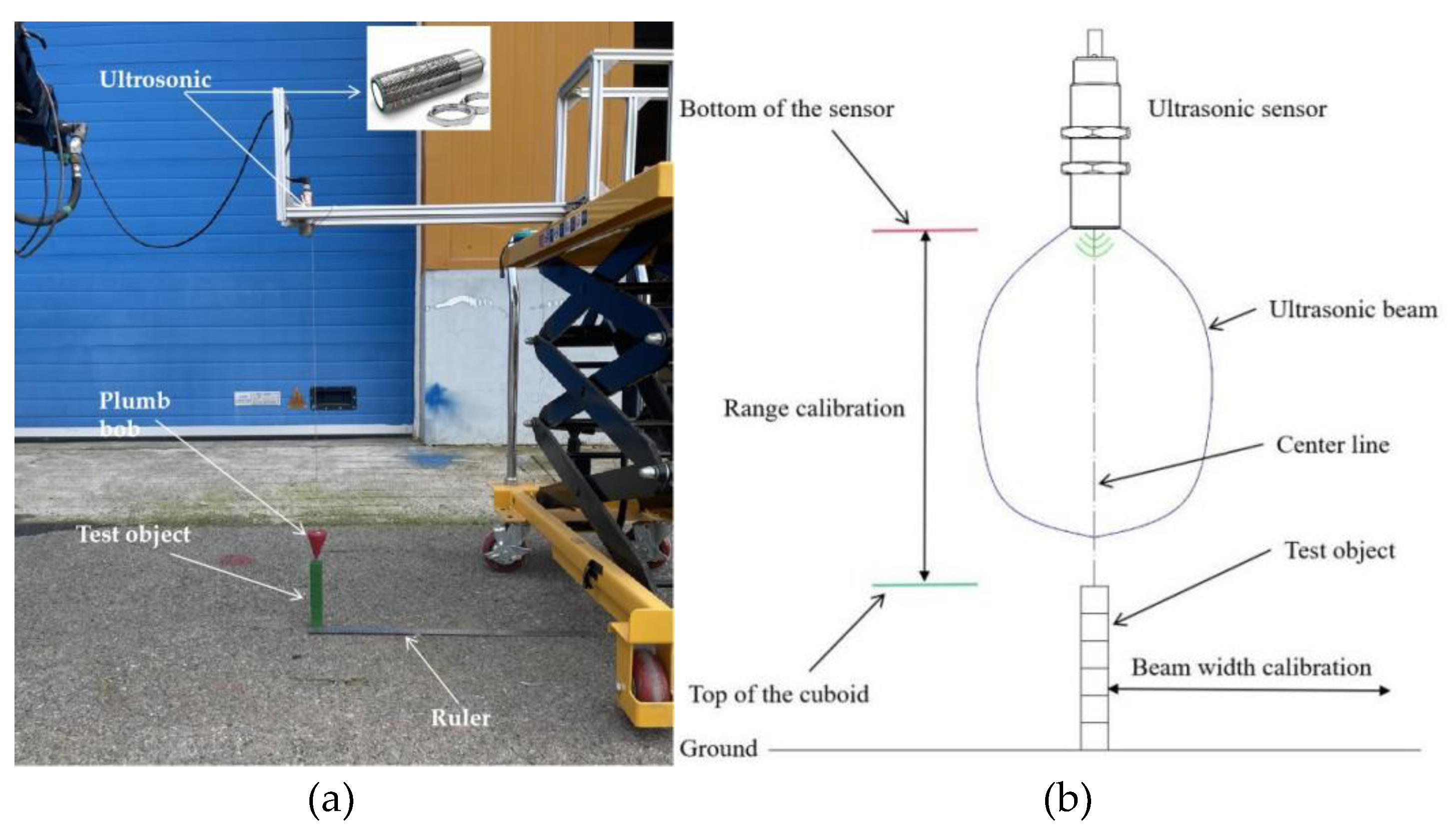
Figure 4.
Field exploration test.
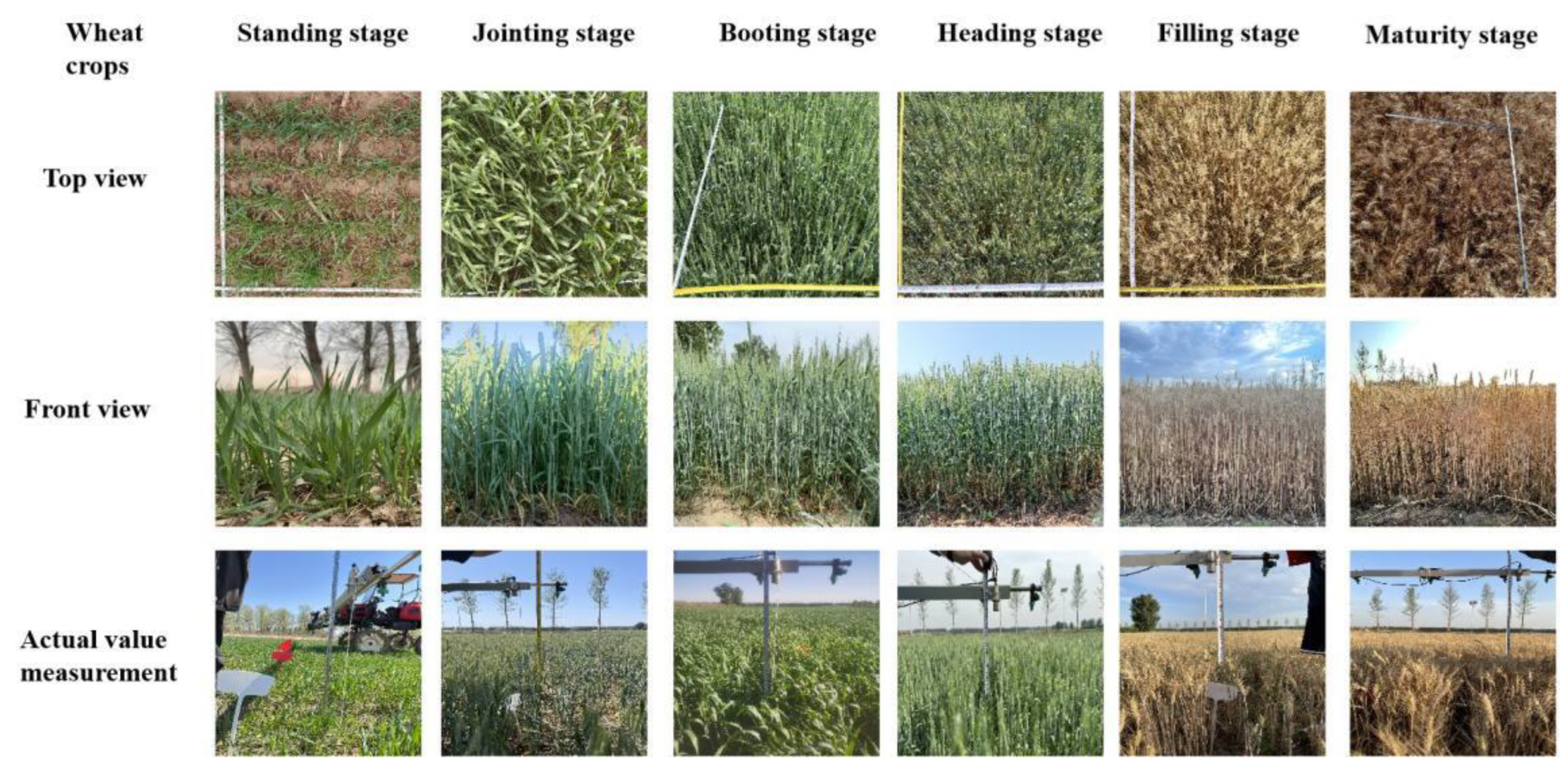
Figure 5.
Calibration of the initial detection curve of the ultrasound sensor.
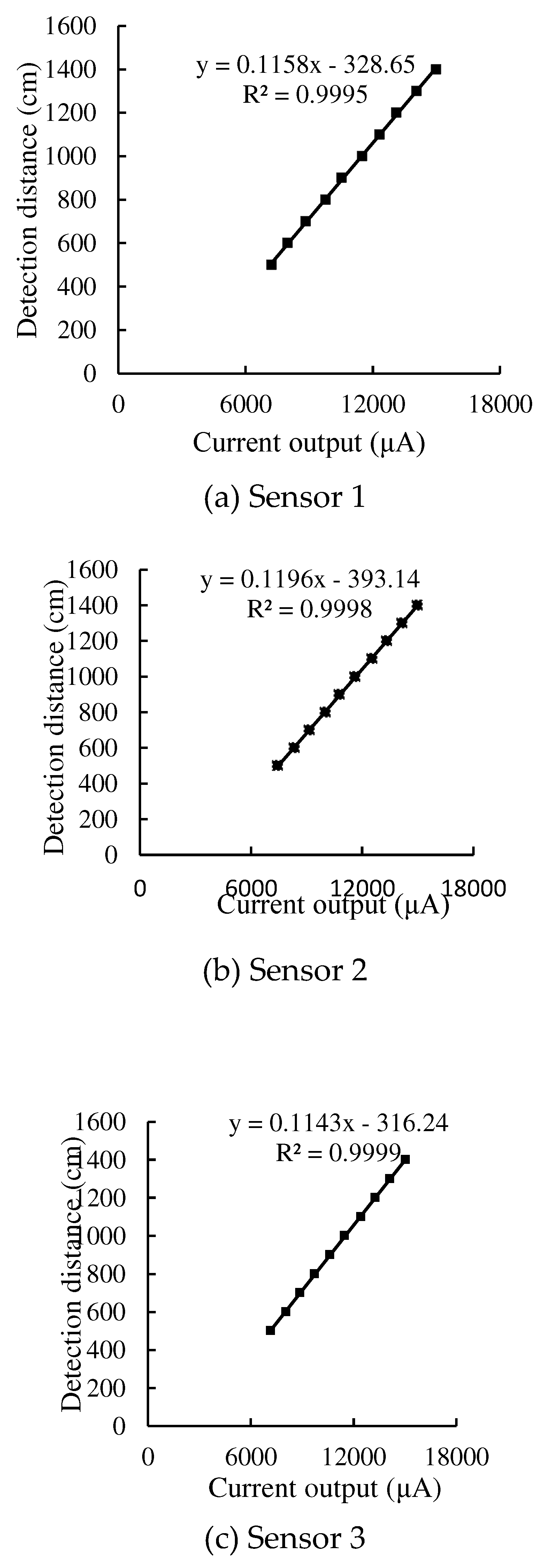
Figure 6.
Calibration of the ultrasonic sensor detection range.
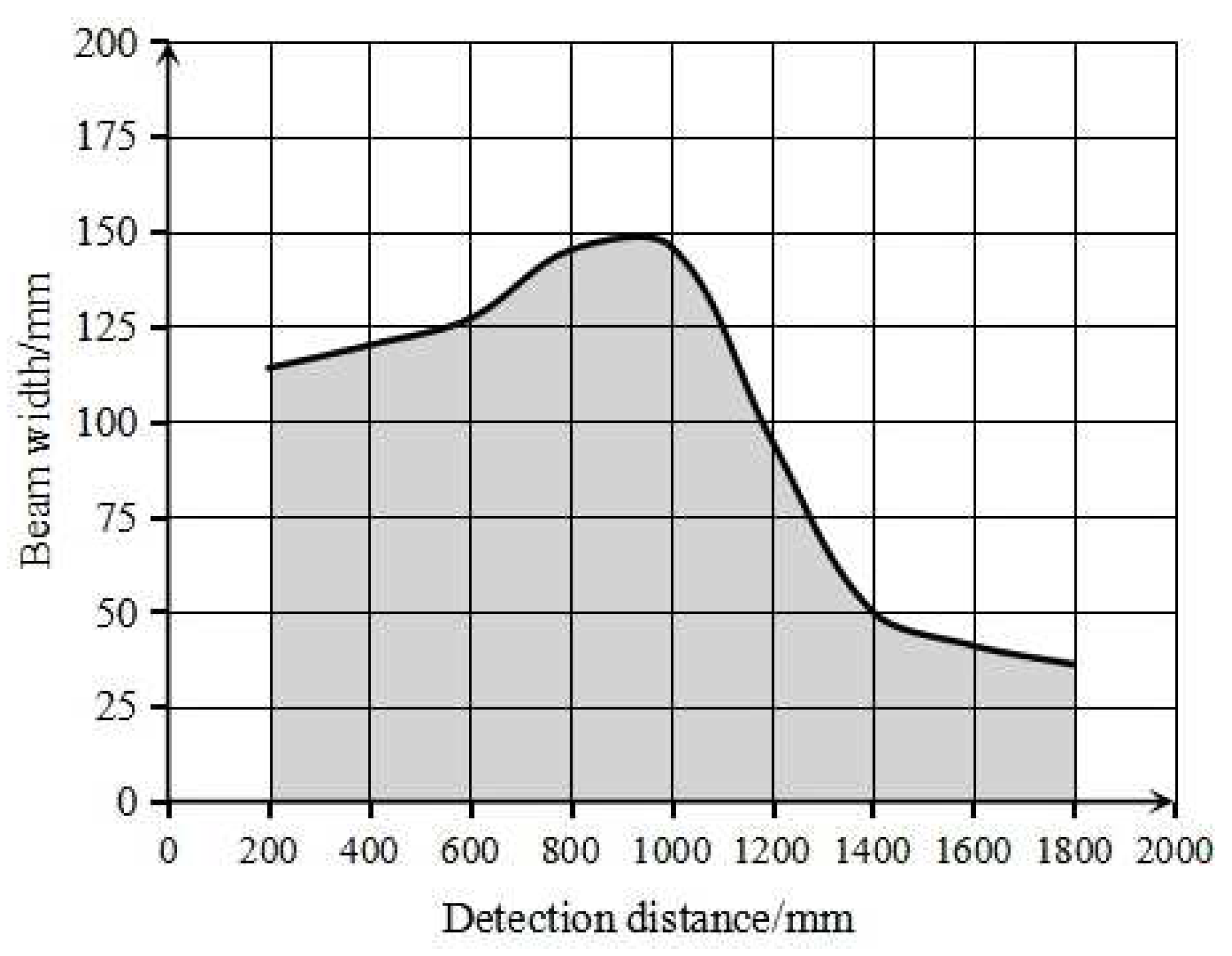
Figure 7.
Relationship between the output current of the fused ultrasound sensor and the detection distance.
Figure 7.
Relationship between the output current of the fused ultrasound sensor and the detection distance.
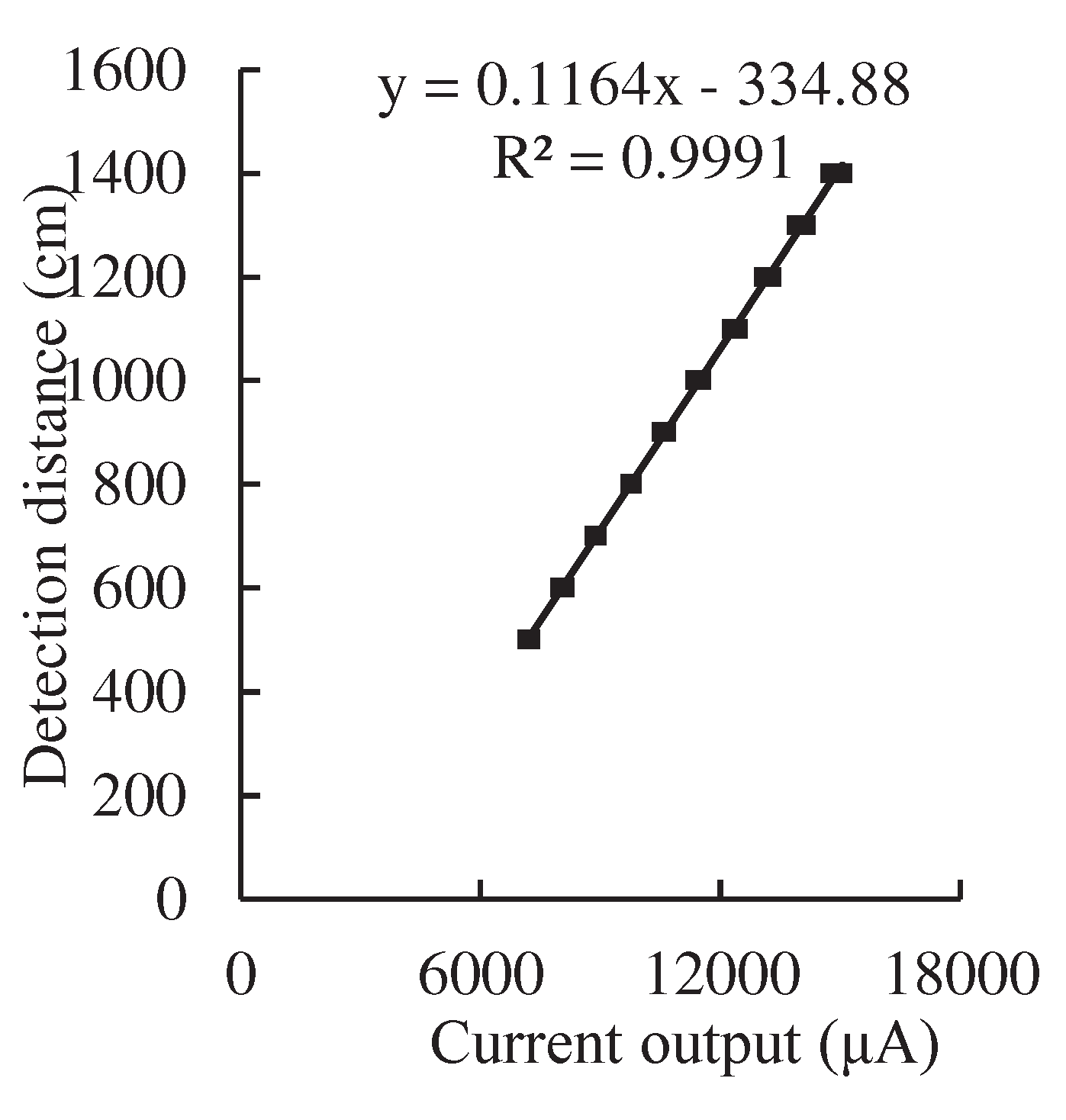
Table 1.
Detection height differences among sensors of the same type.
| Current values/µA | Detection values/mm | Difference/mm | |||
| Sensor | Sensor 2 | Sensor 3 | max | min | |
| 4000 | 135 | 115 | 141 | 26 | 20 |
| 6000 | 366 | 354 | 370 | 16 | 12 |
| 8000 | 598 | 594 | 598 | 4 | 0 |
| 10000 | 829 | 833 | 827 | 6 | 2 |
| 12000 | 1061 | 1042 | 1055 | 19 | 6 |
| 14000 | 1293 | 1311 | 1284 | 27 | 9 |
| 16000 | 1524 | 1550 | 1513 | 37 | 11 |
| 18000 | 1756 | 1790 | 1741 | 49 | 15 |
| 20000 | 1987 | 2029 | 1970 | 59 | 17 |
Table 2.
Verification of the detection value of the unified linear relationship.
| Current values/μA | Detection values/mm | Difference/mm | ||||
|---|---|---|---|---|---|---|
| Sensor 1 | Sensor 2 | Sensor 3 | Fusion | Max | Min | |
| 4000 | 135 | 115 | 141 | 131 | 16 | 4 |
| 6000 | 366 | 354 | 370 | 364 | 10 | 2 |
| 8000 | 598 | 594 | 598 | 596 | 2 | 2 |
| 10000 | 829 | 833 | 827 | 829 | 4 | 0 |
| 12000 | 1061 | 1042 | 1055 | 1062 | 20 | 1 |
| 14000 | 1293 | 1311 | 1284 | 1295 | 16 | 2 |
| 16000 | 1524 | 1550 | 1513 | 1528 | 22 | 4 |
| 18000 | 1756 | 1790 | 1741 | 1760 | 30 | 4 |
| 20000 | 1987 | 2029 | 1970 | 1993 | 36 | 6 |
Table 3.
Ultrasonic detection boom height at multiple detection distances from wheat standing to jointing stage.
Table 3.
Ultrasonic detection boom height at multiple detection distances from wheat standing to jointing stage.
| Stage | Hdbw/mm | Habw/mm | Offset/mm | Hapw/mm | Upp/% | ||||||||||
| S1 | S2 | S 3 | S1 | S2 | S 3 | S1 | S2 | S 3 | S1 | S2 | S 3 | S1 | S2 | S 3 | |
| P1 | 468 | 471 | 460 | 450 | 460 | 450 | 18 | 11 | 10 | 139 | 120 | 113 | 87.05 | 90.83 | 91.15 |
| 542 | 514 | 530 | 532 | 500 | 523 | 10 | 14 | 7 | 139 | 120 | 113 | 92.81 | 88.33 | 93.81 | |
| 640 | 613 | 595 | 625 | 598 | 580 | 15 | 15 | 17 | 139 | 120 | 113 | 89.21 | 87.5 | 86.73 | |
| 699 | 694 | 631 | 680 | 680 | 615 | 19 | 14 | 16 | 139 | 120 | 113 | 86.33 | 88.33 | 85.84 | |
| 758 | 819 | 715 | 734 | 799 | 701 | 24 | 20 | 14 | 139 | 120 | 113 | 82.73 | 83.33 | 87.61 | |
| 815 | 887 | 818 | 784 | 865 | 796 | 31 | 22 | 22 | 139 | 120 | 113 | 77.7 | 81.67 | 80.53 | |
| 865 | 989 | 980 | 840 | 961 | 947 | 25 | 28 | 33 | 139 | 120 | 113 | 82.01 | 76.67 | 70.8 | |
| 920 | 1110 | 1120 | 891 | 1058 | 1075 | 29 | 52 | 45 | 139 | 120 | 113 | 79.14 | 56.67 | 60.18 | |
| 1121 | 1200 | 1214 | 1008 | 1160 | 1138 | 113 | 40 | 76 | 139 | 120 | 113 | 18.71 | 66.67 | 32.74 | |
| 1231 | 1374 | 1300 | 1135 | 1274 | 1231 | 96 | 100 | 69 | 139 | 120 | 113 | 30.94 | 16.67 | 38.94 | |
| 1331 | 1487 | 1450 | 1220 | 1397 | 1357 | 111 | 90 | 93 | 139 | 120 | 113 | 20.14 | 25 | 17.7 | |
| P2 | 535 | 578 | 450 | 510 | 552 | 445 | 25 | 26 | 5 | 447 | 393 | 442 | 94.41 | 93.38 | 98.87 |
| 567 | 626 | 548 | 540 | 610 | 520 | 27 | 16 | 28 | 447 | 393 | 442 | 93.96 | 95.93 | 93.67 | |
| 648 | 701 | 651 | 620 | 670 | 630 | 28 | 31 | 21 | 447 | 393 | 442 | 93.74 | 92.11 | 95.25 | |
| 686 | 780 | 703 | 664 | 750 | 678 | 22 | 30 | 25 | 447 | 393 | 442 | 95.08 | 92.37 | 94.34 | |
| 837 | 842 | 843 | 798 | 800 | 805 | 39 | 42 | 38 | 447 | 393 | 442 | 91.28 | 89.31 | 91.4 | |
| 944 | 926 | 891 | 871 | 864 | 850 | 73 | 62 | 41 | 447 | 393 | 442 | 83.67 | 84.22 | 90.72 | |
| 967 | 952 | 933 | 895 | 890 | 865 | 72 | 62 | 68 | 447 | 393 | 442 | 83.89 | 84.22 | 84.62 | |
| 995 | 1045 | 1052 | 964 | 971 | 973 | 31 | 74 | 79 | 447 | 393 | 442 | 93.06 | 81.17 | 82.13 | |
| 1142 | 1218 | 1283 | 1007 | 1096 | 1065 | 135 | 122 | 218 | 447 | 393 | 442 | 69.8 | 68.96 | 50.68 | |
| 1265 | 1317 | 1329 | 1089 | 1136 | 1143 | 176 | 181 | 186 | 447 | 393 | 442 | 60.63 | 53.94 | 57.92 | |
| 1376 | 1450 | 1468 | 1179 | 1248 | 1173 | 197 | 202 | 295 | 447 | 393 | 442 | 55.93 | 48.6 | 33.26 | |
Table 4.
Ultrasonic detection boom height at multiple detection distances from wheat booting to heading stage.
Table 4.
Ultrasonic detection boom height at multiple detection distances from wheat booting to heading stage.
| Stage | Hdbw/mm | Habw/mm | Offset/mm | Hapw/mm | Upp/% | ||||||||||
| S1 | S2 | S 3 | S1 | S2 | S 3 | S1 | S2 | S 3 | S1 | S2 | S 3 | S1 | S2 | S 3 | |
| P3 | 540 | 534 | 471 | 515 | 500 | 450 | 25 | 34 | 21 | 515 | 528 | 521 | 95.15 | 93.56 | 95.97 |
| 618 | 594 | 518 | 571 | 545 | 485 | 47 | 49 | 33 | 515 | 528 | 521 | 90.87 | 90.72 | 93.67 | |
| 680 | 638 | 535 | 643 | 600 | 508 | 37 | 38 | 27 | 515 | 528 | 521 | 92.82 | 92.8 | 94.82 | |
| 750 | 750 | 587 | 716 | 700 | 550 | 34 | 50 | 37 | 515 | 528 | 521 | 93.4 | 90.53 | 92.9 | |
| 955 | 788 | 741 | 869 | 764 | 620 | 86 | 24 | 121 | 515 | 528 | 521 | 83.3 | 95.45 | 76.78 | |
| 1011 | 864 | 664 | 927 | 812 | 637 | 84 | 52 | 27 | 515 | 528 | 521 | 83.69 | 90.15 | 94.82 | |
| 1034 | 914 | 762 | 951 | 858 | 715 | 83 | 56 | 47 | 515 | 528 | 521 | 83.88 | 89.39 | 90.98 | |
| 1087 | 1031 | 791 | 991 | 930 | 729 | 96 | 101 | 62 | 515 | 528 | 521 | 81.36 | 80.87 | 88.1 | |
| 1500 | 1081 | 901 | 1100 | 989 | 830 | 400 | 92 | 71 | 515 | 528 | 521 | 22.33 | 82.58 | 86.37 | |
| 1389 | 1320 | 1030 | 1217 | 1158 | 943 | 172 | 162 | 87 | 515 | 528 | 521 | 66.6 | 70.08 | 83.3 | |
| P4 | 480 | 511 | 487 | 450 | 495 | 470 | 30 | 16 | 17 | 526 | 552 | 603 | 94.3 | 97.1 | 97.18 |
| 595 | 543 | 540 | 570 | 520 | 520 | 25 | 23 | 20 | 526 | 552 | 603 | 95.25 | 95.83 | 96.68 | |
| 739 | 680 | 701 | 690 | 630 | 650 | 49 | 50 | 51 | 526 | 552 | 603 | 90.68 | 90.94 | 91.54 | |
| 829 | 781 | 700 | 760 | 710 | 657 | 69 | 71 | 43 | 526 | 552 | 603 | 86.88 | 87.14 | 92.87 | |
| 846 | 800 | 769 | 780 | 760 | 730 | 66 | 40 | 39 | 526 | 552 | 603 | 87.45 | 92.75 | 93.53 | |
| 894 | 897 | 941 | 835 | 820 | 850 | 59 | 77 | 91 | 526 | 552 | 603 | 88.78 | 86.05 | 84.91 | |
| 959 | 948 | 1025 | 870 | 860 | 932 | 89 | 88 | 93 | 526 | 552 | 603 | 83.08 | 84.06 | 84.58 | |
| 973 | 1035 | 1050 | 893 | 934 | 948 | 80 | 101 | 102 | 526 | 552 | 603 | 84.79 | 81.7 | 83.08 | |
| 1041 | 1238 | 1047 | 951 | 1030 | 970 | 90 | 208 | 77 | 526 | 552 | 603 | 82.89 | 62.32 | 87.23 | |
| 1241 | 1358 | 1321 | 1024 | 1062 | 1076 | 217 | 296 | 245 | 526 | 552 | 603 | 58.75 | 46.38 | 59.37 | |
Table 5.
Ultrasonic detection boom height at multiple detection distances from wheat filling to maturity stage.
Table 5.
Ultrasonic detection boom height at multiple detection distances from wheat filling to maturity stage.
| Stage | Hdbw/mm | Habw/mm | Offset/mm | Hapw/mm | Upp/% | ||||||||||
| S1 | S2 | S 3 | S1 | S2 | S 3 | S1 | S2 | S 3 | S1 | S2 | S 3 | S1 | S2 | S 3 | |
| P5 | 560 | 483 | 486 | 533 | 455 | 450 | 27 | 28 | 36 | 542 | 568 | 622 | 95.02 | 95.07 | 94.21 |
| 608 | 539 | 563 | 560 | 510 | 530 | 48 | 29 | 33 | 542 | 568 | 622 | 91.14 | 94.89 | 94.69 | |
| 780 | 634 | 654 | 720 | 580 | 590 | 60 | 54 | 64 | 542 | 568 | 622 | 88.93 | 90.49 | 89.71 | |
| 894 | 727 | 720 | 818 | 690 | 670 | 76 | 37 | 50 | 542 | 568 | 622 | 85.98 | 93.49 | 91.96 | |
| 899 | 835 | 844 | 846 | 784 | 790 | 53 | 51 | 54 | 542 | 568 | 622 | 90.22 | 91.02 | 91.32 | |
| 1035 | 950 | 865 | 930 | 867 | 840 | 105 | 83 | 25 | 542 | 568 | 622 | 80.63 | 85.39 | 95.98 | |
| 1079 | 991 | 974 | 968 | 895 | 880 | 111 | 96 | 94 | 542 | 568 | 622 | 79.52 | 83.10 | 84.89 | |
| 1472 | 1041 | 1000 | 1025 | 940 | 899 | 447 | 101 | 101 | 542 | 568 | 622 | 17.53 | 82.22 | 83.76 | |
| 1625 | 1143 | 1100 | 1160 | 1000 | 975 | 465 | 143 | 125 | 542 | 568 | 622 | 14.21 | 74.82 | 79.90 | |
| 1700 | 1502 | 1354 | 1189 | 1040 | 1000 | 511 | 462 | 354 | 542 | 568 | 622 | 5.72 | 18.66 | 43.09 | |
| P6 | 612 | 541 | 460 | 580 | 510 | 450 | 32 | 31 | 10 | 638 | 654 | 688 | 94.98 | 95.26 | 98.55 |
| 720 | 637 | 560 | 670 | 600 | 523 | 50 | 37 | 37 | 638 | 654 | 688 | 92.16 | 94.34 | 94.62 | |
| 794 | 730 | 630 | 740 | 723 | 617 | 54 | 7 | 13 | 638 | 654 | 688 | 91.54 | 98.93 | 98.11 | |
| 859 | 804 | 752 | 810 | 760 | 700 | 49 | 44 | 52 | 638 | 654 | 688 | 92.32 | 93.27 | 92.44 | |
| 962 | 823 | 780 | 865 | 790 | 765 | 97 | 33 | 15 | 638 | 654 | 688 | 84.80 | 94.95 | 97.82 | |
| 1000 | 915 | 871 | 890 | 850 | 810 | 110 | 65 | 61 | 638 | 654 | 688 | 82.76 | 90.06 | 91.13 | |
| 1063 | 1030 | 964 | 950 | 930 | 860 | 113 | 100 | 104 | 638 | 654 | 688 | 82.29 | 84.71 | 84.88 | |
| 1304 | 1095 | 1050 | 1001 | 964 | 930 | 303 | 131 | 120 | 638 | 654 | 688 | 52.51 | 79.97 | 82.56 | |
| 1465 | 1322 | 1157 | 1013 | 1049 | 966 | 452 | 273 | 191 | 638 | 654 | 688 | 29.15 | 58.26 | 72.24 | |
Table 6.
Preliminary grouping by Upp.
| Stages | Upp/% | Dd/mm | Average offset /mm |
Standard deviation /mm |
|---|---|---|---|---|
| Standing stage | 85~98 | 450~701 | 13.85 | 3.48 |
| 70~84 | 734~961 | 26 | 4.47 | |
| Jointing stage | 85~98 | 450~850 | 27.75 | 9.59 |
| 70~84 | 864~973 | 70.00 | 6.35 | |
| Booting stage | 85~98 | 450~858 | 40.58 | 13.83 |
| 70~84 | 869~991 | 89.86 | 6.72 | |
| Heading stage | 85~98 | 450~850 | 46.44 | 22.35 |
| 70~84 | 860~951 | 91.86 | 7.69 | |
| Filling stage | 85~98 | 450~867 | 47.53 | 17.21 |
| 70~84 | 880~1000 | 109.5 | 16.7 | |
| Maturity stage | 85~98 | 450~850 | 36.88 | 18.26 |
| 70~84 | 860~966 | 120.75 | 30.45 |
Table 8.
Merging model of boom height detection.
| Model equation | Compensation value/mm | Application scope | |
|---|---|---|---|
| Dd/mm | Stage | ||
| y = 0.1164x - 334.88+A | 19.93 | 450~1000 | Standing stage |
| 39.84 | 450~850 | Jointing stage to maturity stage | |
| 96.39 | 851~1000 | ||
Table 9.
Verification results of the boom height detection model.
| Stage | Habw/mm | Hdbw1/mm | Hdbw2/mm | Ev1/mm | Ev2/mm | Aev1/mm | Aev2/mm |
|---|---|---|---|---|---|---|---|
| Standing | 460 | 463 | 457 | 3 | 3 | 9.50 | 9.10 |
| 518 | 507 | 501 | 11 | 17 | |||
| 552 | 545 | 539 | 7 | 13 | |||
| 645 | 650 | 644 | 5 | 1 | |||
| 717 | 733 | 727 | 16 | 10 | |||
| 764 | 773 | 779 | 9 | 15 | |||
| 799 | 791 | 797 | 8 | 2 | |||
| 895 | 889 | 895 | 6 | 0 | |||
| 961 | 961 | 967 | 0 | 6 | |||
| 998 | 968 | 974 | 30 | 24 | |||
| Jointing | 513 | 508 | 496 | 5 | 17 | 19.89 | 19.67 |
| 540 | 563 | 551 | 23 | 11 | |||
| 598 | 601 | 589 | 3 | 9 | |||
| 620 | 604 | 592 | 16 | 28 | |||
| 653 | 697 | 685 | 44 | 32 | |||
| 800 | 793 | 781 | 7 | 19 | |||
| 805 | 800 | 788 | 5 | 17 | |||
| 964 | 1024 | 998 | 60 | 34 | |||
| 996 | 1012 | 986 | 16 | 10 | |||
| Booting | 454 | 490 | 491 | 36 | 37 | 27.70 | 26.30 |
| 520 | 509 | 510 | 11 | 10 | |||
| 600 | 562 | 563 | 38 | 37 | |||
| 500 | 490 | 491 | 10 | 9 | |||
| 670 | 632 | 633 | 38 | 37 | |||
| 700 | 720 | 721 | 20 | 21 | |||
| 774 | 760 | 761 | 14 | 13 | |||
| 840 | 872 | 873 | 32 | 33 | |||
| 899 | 920 | 914 | 21 | 15 | |||
| 953 | 1010 | 1004 | 57 | 51 | |||
| Heading | 448 | 427 | 434 | 21 | 14 | 23.44 | 24.33 |
| 550 | 548 | 555 | 2 | 5 | |||
| 590 | 572 | 579 | 18 | 11 | |||
| 620 | 582 | 589 | 38 | 31 | |||
| 670 | 667 | 674 | 3 | 4 | |||
| 746 | 781 | 788 | 35 | 42 | |||
| 775 | 805 | 812 | 30 | 37 | |||
| 842 | 857 | 864 | 15 | 22 | |||
| 964 | 915 | 911 | 49 | 53 | |||
| Filling | 470 | 479 | 485 | 9 | 15 | 24.67 | 18.44 |
| 550 | 542 | 548 | 8 | 2 | |||
| 630 | 624 | 630 | 6 | 0 | |||
| 680 | 671 | 677 | 9 | 3 | |||
| 710 | 728 | 734 | 18 | 24 | |||
| 800 | 769 | 775 | 31 | 25 | |||
| 845 | 848 | 854 | 3 | 9 | |||
| 900 | 847 | 916 | 53 | 16 | |||
| 970 | 885 | 898 | 85 | 72 | |||
| Maturity | 430 | 424 | 421 | 6 | 9 | 19.30 | 18.90 |
| 500 | 472 | 469 | 28 | 31 | |||
| 550 | 538 | 535 | 12 | 15 | |||
| 730 | 715 | 712 | 15 | 18 | |||
| 750 | 740 | 737 | 10 | 13 | |||
| 790 | 800 | 797 | 10 | 7 | |||
| 850 | 878 | 875 | 28 | 25 | |||
| 930 | 911 | 936 | 19 | 6 | |||
| 940 | 943 | 968 | 3 | 28 | |||
| 980 | 918 | 943 | 62 | 37 |
Table 10.
Detection models of ultrasonic boom height in the whole wheat growth cycle.
| Model equation | Compensation value/mm | Applicable scope | |
|---|---|---|---|
| Dd/mm | Stage | ||
| y = 0.1164x - 334.88+A | 19.93 | 450~950 | Standing stage |
| 39.84 | 450~850 | Jointing stage to maturity stage | |
| 96.39 | 851~950 | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



