Submitted:
16 November 2023
Posted:
16 November 2023
You are already at the latest version
Abstract
Multiple entities use unmanned underwater drones for various functions, but how can they navigate underwater at such depths without a pilot? It is essential to understand how different unmanned underwater drones, such as remotely operated and autonomous underwater vehicles, function with underwater sensing technology. As each unmanned underwater drone has its function, the combination or chief use of the sensors is equally essential to recognize. Different underwater drone designs can be more cost-effective when a human is not on board as it can lead to a smaller, streamlined design in which oxygen and pressure control need not be a factor. Without considering oxygen limitations, these underwater drones can remain submerged for extended periods. These underwater vehicles operate autonomously or in conditions that may leave the individuals controlling the trajectory relying upon these sensors. It is also necessary to review how these sensors work, how they are implemented, and how they can help the public. This review was performed to address these research questions and provide an overview of sensors employed by unmanned underwater vehicles.
Keywords:
UUV
; AUV
; ROV
; Acoustic Sensors
; Magnetic Sensors
; Bionic Sensors
1. Introduction
The ocean covers two-thirds of the surface of the Earth, and it is estimated that five percent of that has been explored [1]. It is integral that this enormous source of life be investigated as it can be a window into the changing climate and affect several ecosystems in the water and on land [2]. The oceans are crucial to all life on Earth, so why is it understudied? Chiefly, visibility, temperature, and immense pressures present obstacles for individuals looking to gather research or those looking to perform maneuvers for mine or threat detection. As mentioned above, the environment leads to challenges for ocean exploration by humans, some of the more significant factors being accessibility, cost, and overall safety. One way to address the safety issues introduced by the planet’s most influential, understudied ecosystem is to send crewless underwater vehicles to perform various data collection duties [3].
The two types of unmanned underwater vehicles (UUVs) that will be the focal point of this review are autonomous underwater vehicles (AUVs) and remotely operated vehicles (ROVs) [4]. An AUV operates entirely independently of any ship without any conductor intervention. An ROV is unoccupied but is tethered or connected to a ship by cable. These cables can act as a form of communication between the on-ship operator and the underwater drone. Several factors influence why these vehicles are to be unmanned. Whether that be due to the dangerous conditions since deep waters can be hazardous or other factors, such as costs and duration of the dives, are significant drivers as to why underwater vehicles such as ROVs and AUVs operate without a human occupant [3]? Different underwater drone designs can be more cost-effective when a human is not on board as it can lead to a smaller, streamlined design in which oxygen and pressure control need not be a factor. Without considering oxygen limitations, these underwater drones can remain submerged for extended periods, which is favorable [3]. Therefore, autonomous underwater and remotely operated vehicles can perform tasks like patrolling and exploration without relying on direct human influence. The phrase “flying blind” comes to mind as these underwater vehicles operate autonomously or in conditions that may leave the individuals controlling the trajectory relying upon these sensors as sight and traditional cameras may be obscured. Due to their lack of pilots, AUVs and ROVs are equipped with numerous sensors for various purposes, whether navigation, monitoring, detection, or communication [2].
This paper will review the most recent advancements in underwater drone sensor technology, precisely their functional purposes and benefits. As each unmanned underwater drone has its function, the combination or chief use of the sensors is equally essential to recognize. This review will cover the sensors used specifically for oceanographic measurements, navigation, or both. The underwater sensing technologies investigated in this report are acoustic, magnetic, and bionic sensors and how they function for navigation and research.
2. Acoustic Sensors
One of the oldest forms of underwater sensors is acoustic sensors. These have many applications, such as data acquisition, communication, navigation, and positioning. There are several subsections for these acoustic sensors that have separate capabilities. These acoustic sensors, with their various uses, are essential to identify. This section will highlight the different uses of acoustic sensors.
A. Acoustic Sensors for Navigation
As mentioned, these drones are unmanned, which can create a specific set of obstacles. With the removal of a direct pilot of these vehicles, it is of utmost importance for the AUV or ROV to be aware of its surroundings and location at all times. At such depths, what we know as GPS, a global positioning system, is nonfunctional. Therefore, baseline sensors are of utmost importance as the autonomous operation of an AUV requires an onboard navigation system to provide real-time location, high-precision data, and absolute position outputs [5]. There are three categories of underwater baseline positioning systems: long baseline (LBL), short baseline (SBL), and ultrashort baseline (USBL) positioning systems [6]. Each of these methods requires the proximity, the baseline distance, to a transponder that acts as a beacon, hence the acoustic denomination.
Figure 1.
Long Baseline Acoustic Sensor System [6].
Figure 1.
Long Baseline Acoustic Sensor System [6].
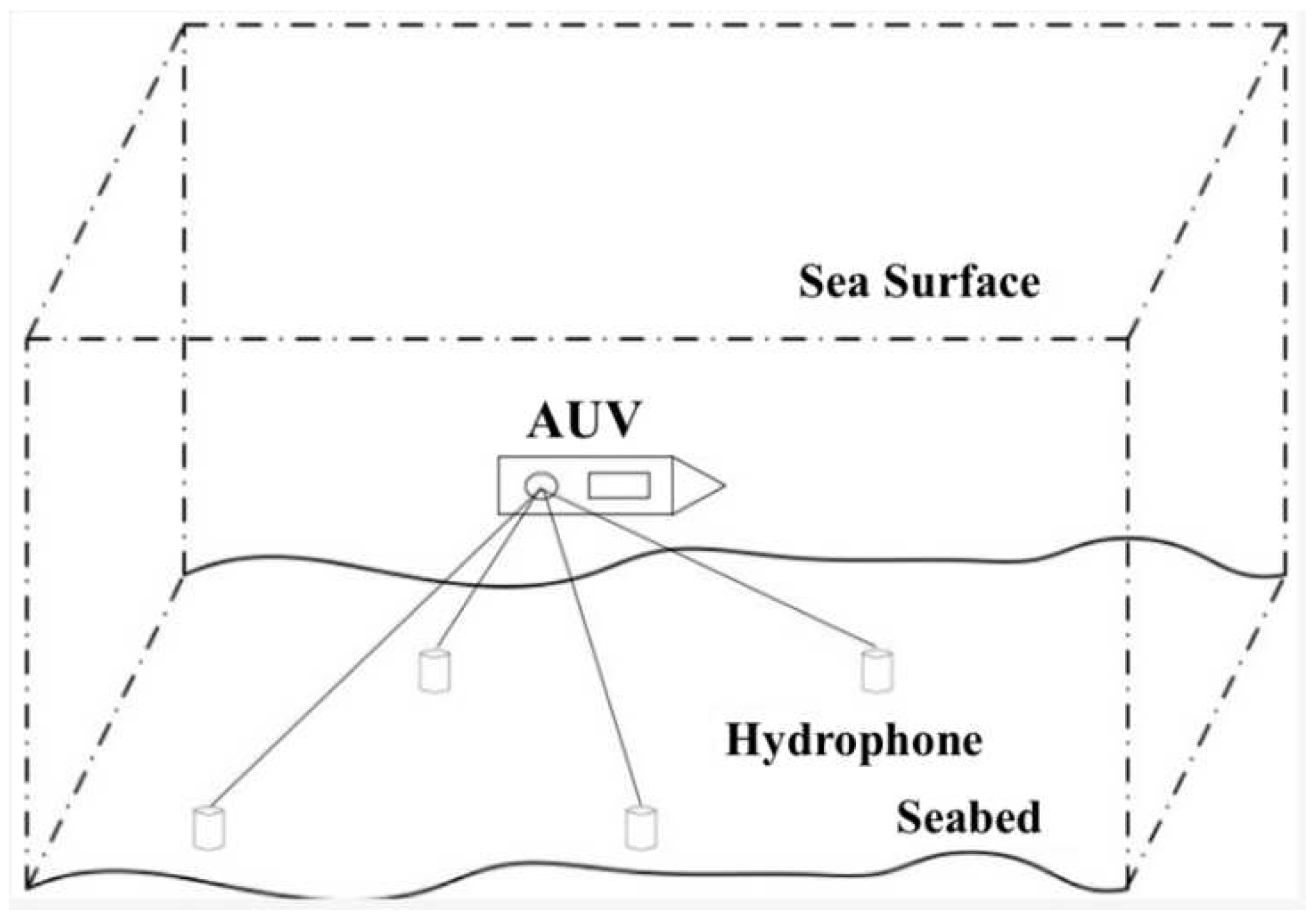
These beacons or transponders communicate with transducers on the UUVs, which aid in determining the exact position. Transducers listen to pings emitted by underwater drones where a distance estimation is obtained by the turnaround time at a specific frequency, and by using algorithms based on recursive least squares, the vehicle can estimate a position [7]. These devices relay pings or an acoustic signal, and since the speed of sound in water is a known value, these sensors measure the time it takes for these signals to be received; hence, those on land or a ship can establish the AUV or ROV’s location.
Figure 2.
Acoustic Sensor System and Communications [8].
Figure 2.
Acoustic Sensor System and Communications [8].
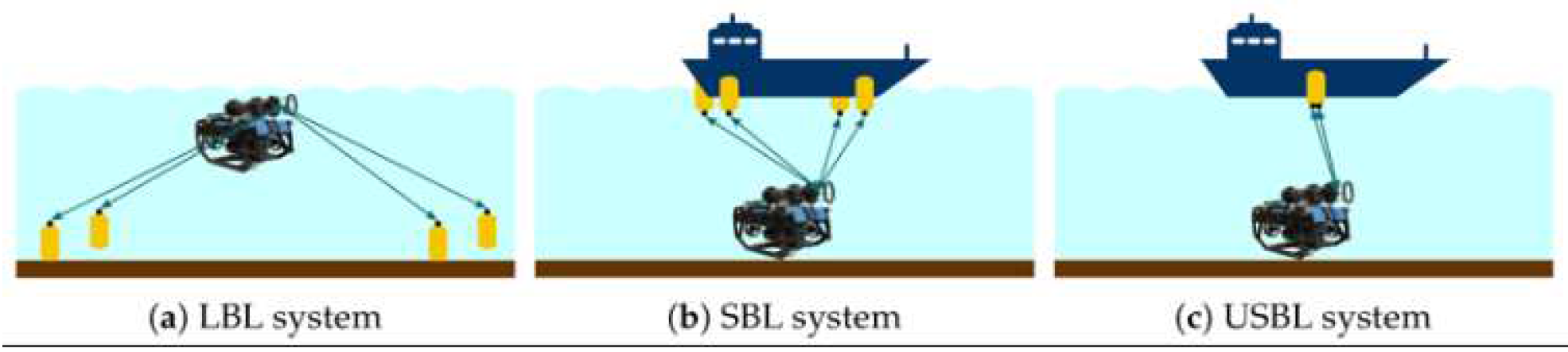
The LBL systems differ from the USBL and SBL systems as they require communication between multiple transponders, shown in Figure 1. These transponders are placed on the ocean floor at baseline lengths of 100m to 20km. Any underwater vehicle can be localized within the coverage area of the acoustic signal [6]. This method can be expensive and somewhat complicated; thus, the SBL and USBL systems are more favorable. The underwater vehicle would require multiple acoustic receivers, and this arrangement is necessary to detect separate values from the transponder on the ocean floor. Autonomous and remotely operated underwater vehicles, when using short and ultrashort baseline systems, need to determine the distance at which they are from the beacon and the angle or phase at which the replica signal arrives, which determines the direction [7]. The only difference between the USBL and the SBL systems is the relative distance between transducers; they are about 1 meter and 20-50 meters, respectively [6]. The 3D relative position of the underwater drone to the receiver can be established with both distance and direction.
B. Acoustic Sensors for Research
One of the more commonly thought of sensors used in underwater vehicles, manned and unmanned, is sonar. While acoustic sensors can be used for navigation and positioning, they can also be used in research and data collection since these unmanned drones can go to depths incompatible with long-term human exposure. Geological surveys of the ocean floor have been scarcely conducted; it has been said that humans have explored more of what is in space than what is in our oceans due in part to the difficulties of data collection because of the intensely cold temperatures and pressures at the depths necessary for mapping. There are different types of sonar: single-beam, multibeam, and side scan.
Single-beam sonar is one of the earliest technologies to be applied to seafloor exploration. This technology consists of piezoelectric crystals or ceramic transducers to generate and receive acoustic signals; the time difference between such is how the seafloor depth is measured [9]. It works as an echo type of device. The sonar system on board the AUV or ROV will emit sound waves, then travel and hit an object. The system will then reflect those waves to calculate how far from the object. This is how the depths are translated into topographic maps. Single-beam sonars are cheap, easy to use, and trim; thus, they are used widely in marine engineering, resource exploration, and even in finding the Titanic wreck in 1920 [6,9]. However, these sensors can only be used in some circumstances of oceanographic data collection in small, focused areas. Single-beam sonar is much like a flashlight; it can do detailed surveys in focal areas but is not equipped to scan a whole image.
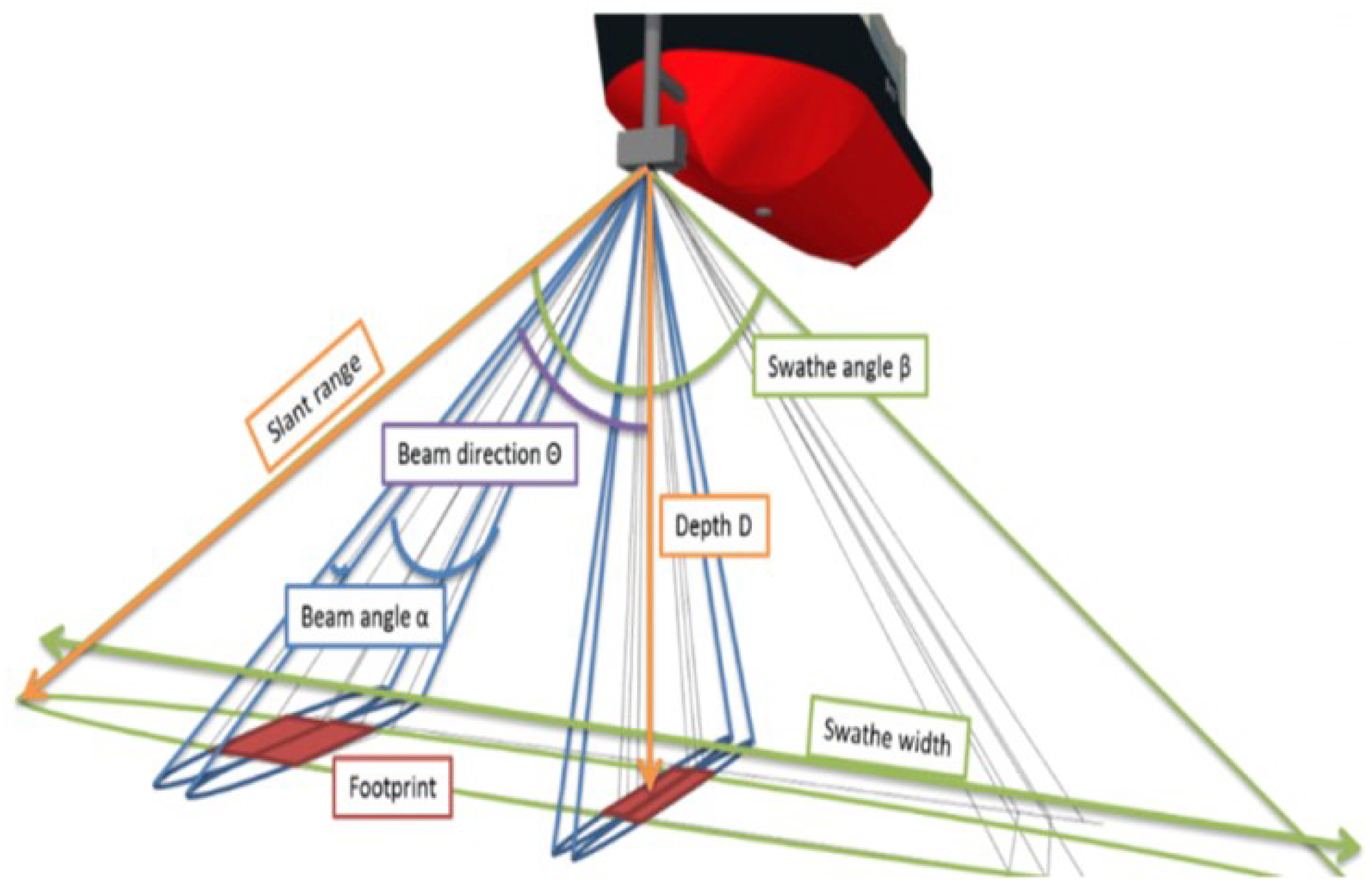
Multibeam sonar transmits a fan of beams at once and receives multiple echoed signals to obtain a greater area of the seafloor. It’s a combination of various single-beam sonars [6]. Low-frequency sound beams are often used in this detection method because they attenuate so slowly that longer distances can be reached. The GeoSwath Plus is a multibeam sonar system integrated into the Remus 100 AUV, and up to 200m depth below the AUV can be measured [9].
Figure 3.
Application of Multibeam Sonar for oceanographic mapping [9].
Figure 3.
Application of Multibeam Sonar for oceanographic mapping [9].
Side-scan sonar is a happy medium between the two. While single and multibeam sonars require one and over one hundred beams, respectively, side-scan sonars deploy two beams. In submersibles, side-scan sonar transmits signals from both sides using transducers [9]. This combination allows for data to be collected from either side of the underwater crewless vehicle as it travels over specific spans of the ocean floor. This technology produces an image developed by the returned echoes, as raised seafloor leads to a stronger echo, and soft, smooth spreads have a weaker echo [9]. This analysis can help to determine the size and composition of what it scans.
3. Magnetic Sensors
Magnetic sensors have the same variety of uses in unmanned underwater vehicles. These sensors can collect data from the AUV’s or ROV’s perspective to assist in navigation and positional awareness. They then can relay that information as they see fit for research or defense purposes.
A. Magnetic Sensors for Navigation
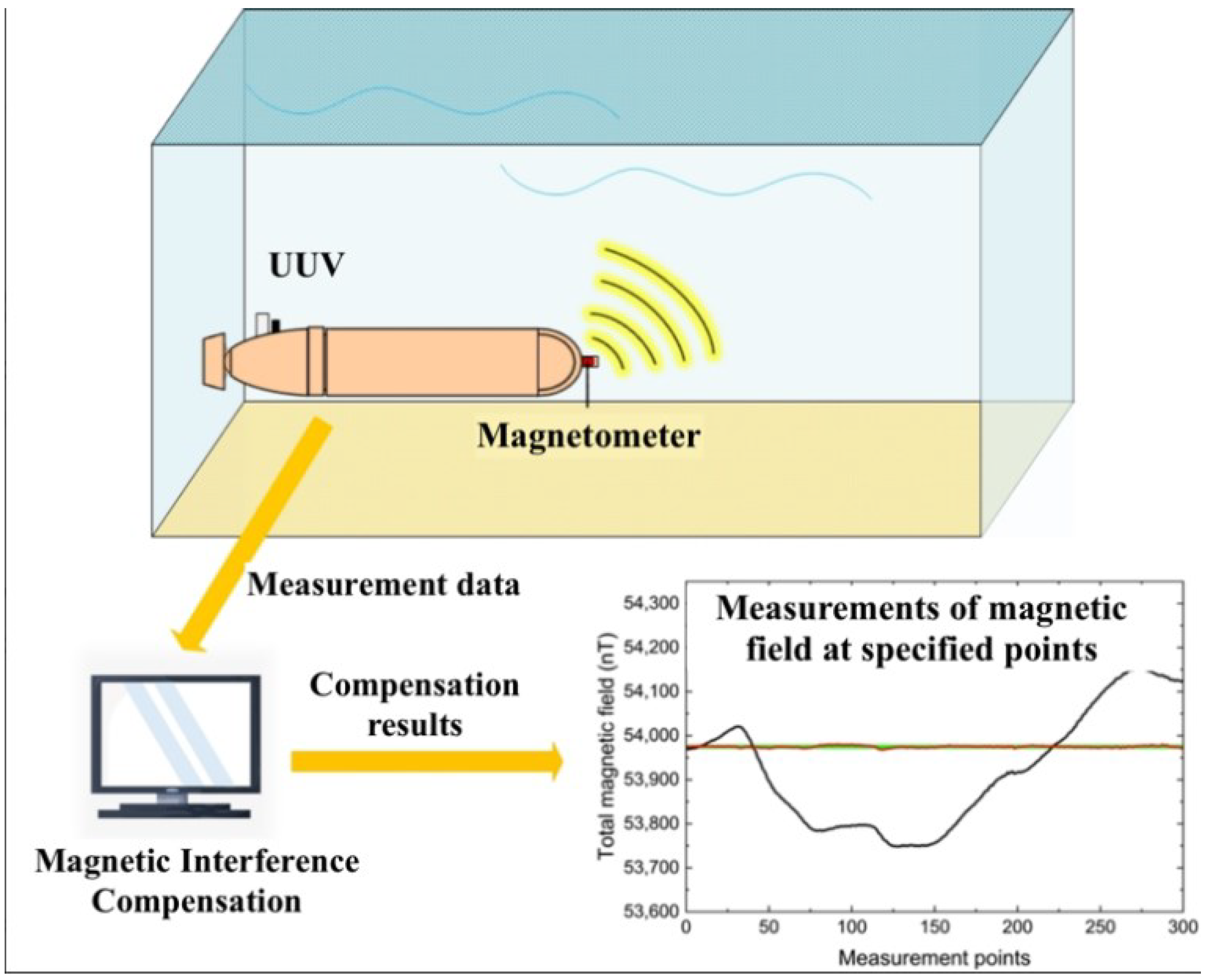
One of the ways that these underwater unmanned vehicles can navigate extreme depths is by using a magnetometer. The magnetometer measures the magnetic field variation in three referential axes subtracted from Earth’s magnetic field [7]. These sensors are sensitive; they must measure what is unseen above and under the water. Since they are so responsive, they can be easily interfered with. A magnetometer can be designed as a towed fish and must keep a certain distance from the water vehicle because electromagnetic equipment on larger UUVs will produce electromagnetic interference, too [9]. Even while widely used in the UUV development field, the operation of the sensor is sensitive to the noise caused by other sources like the operation of additional sensors and motors [7]. Within the last five years, there have been advancements in magnetic sensor technology, enabling designers and manufacturers to integrate these magnetometers within the AUV or ROV. A startup company, Ocean Floor Geophysics (OFG), provides a self-compensation magnetometer (SCM) system based on a real-time compensation algorithm, which can be integrated inside AUVs [9].
While these are useful for general position or location knowledge, magnetometers are best used with other sensors. Several factors must be considered in underwater navigation and propulsion, such as a pressure sensor to measure depth, a gyroscope, and an accelerometer to control altitude [7]. It is essential to understand what different sensors are capable of and how they may work in cooperation.
Figure 4.
Unmanned Underwater Vehicle magnetometer function [10].
Figure 4.
Unmanned Underwater Vehicle magnetometer function [10].
B. Magnetic Sensors for Research and Data Collection
Another application of magnetic sensors is for research and data collection. This circles back to one of the purposes for AUVs and ROVs: the ability to go where manned vehicles cannot go and work below the surface for extended periods. Underwater magnetic sensing has many advantages, including high concealment, robust detection performance, and high positioning accuracy, which is optimal for functioning in complicated environments [6]. These sensors can assist government agencies with security systems capable of tracking signals or moving objects underwater. Research on underwater magnetic sensing technology has been developed to improve high-precision sensors used in electric field generation mechanisms and marine electromagnetic exploration technology [6].
Magnetic sensors can also be employed in object detection tasks. These could be used to detect possible dangerous ferrous objects. They are beneficial for detecting anchors, fishing trawls, and cables [5]. This could benefit ocean conservation and ensure the location of large underwater cables that bring power and communication. For the detection, low-frequency currents are applied to the cables’ conductors, producing a coaxial alternating magnetic field measured by the magnetometers [12].
Figure 5.
Autonomous Underwater Vehicle tracking underwater cable with magnetometers [11].
Figure 5.
Autonomous Underwater Vehicle tracking underwater cable with magnetometers [11].
4. Bionic Sensors
One of the ways UUVs have become so well adapted to submerged travel is by mimicking biological processes that marine life uses to navigate. In the last few years, there has been an increased interest in improving the performance of UUVs by taking a bioinspired approach [7]. This inspiration has opened the doors for artificial intelligence and deep learning protocols, which can obtain and share information from sensors modeled after ocean life. Bionic sensors have become a more prevalent research topic, with lateral line, tactile, and visual sensors.
A. Bionics: Whiskers
Whiskers are sensory equipment used by land and ocean animals that assist in navigation, identification, and location of prey. Researchers have begun to develop many types of whisker-like structures inspired by seal whiskers. One example could sense a change in hydrological information at record speeds [6]. These whisker-like sensors are now being 3D printed for use, and one of the more recent advancements is the active whiskers, which use a motor to control movement [6]. Recently, individuals have been working toward developing a whisker-like sensor that can capture necessary information passively with a nanogenerator, eliminating the need for external motors or power sources. Figure 7 shows the way vortexes underwater can be detected. The underwater vortexes are the paths made by other sea life that are picked up by the nerves in a seal’s whiskers, as seen in Figure 6. The purpose of the evolution of the UBWS, or underwater bionic whisker sensor, was to make something capable of perceiving the hydrodynamic trails created by moving objects underwater [13].
B. Bionics: Lateral Lines
Lateral lines are a group of sensory organs along the fish body in Figure 7. The lateral line system of fish consists of two main components: the superficial neuromast, which perceives the flow velocity in the near-field environment, and the canal neuromast, which is sensitive to pressure changes in the near-field environment [6]. Almost all species of fish can perceive minute fluid motions utilizing the lateral system; when water flows over the cupula, the deflection is converted to a neural signal. This form of sensing is ideal when implemented within an ROV or AUV, as it is a network that can sense velocity and pressure changes, which can either navigate or collect information.
Figure 6.
Components and function of a whisker sensor [13].
Figure 6.
Components and function of a whisker sensor [13].
Fish use these organs to assist in navigation in the dark, which is integral for any unmanned vehicle at extreme depths. One approach to mimicking marine life is by utilizing neural networks. The neural network modeling method was built to mimic the fish in a complex environment by training over a long period to complete various activities and behaviors, building neural networks to process the received signals [14]. This is a combination approach of using artificial intelligence to collect, store, and recognize patterns created by the data obtained by sensors on this modeled neural network. There are more specific types of these sensors. The earlier versions would need an external power supply to function, which can unnecessarily add weight and take up unnecessary space on a UUV. One type of sensor is made of piezoelectric materials, which are energy-transforming. When subject to stress, they can generate voltages and do not need an extrinsic power supply, so hydrodynamic flow sensing could be improved [5].
Figure 7.
Diagram of the lateral line organs of fish.
5. Discussion
Unmanned underwater drones play an important role in safety, security, and research purposes. These vehicles are either autonomous in function or are remotely operated and cannot rely on singular sight. Multiple sensors working together can aid navigation and enable different data collection services.
Many underwater vehicles use acoustic and magnetic sensors for navigation and research purposes. The acoustic sensors used for navigation are baseline sensors. Baseline sensing technology uses a network of sea-floor-mounted baseline transponders to communicate an underwater drone’s accurate position fix using those transponders as reference points [15]. The use of a variety of sonar systems can assist these underwater vehicles in scanning the ocean floor, detecting the topography of the sea floor, or recognizing objects at extreme depths.
Magnetic sensors can do a similar function with object recognition. Large cables are run underwater on the ocean floor, and magnetic sensors can help guide the ROVs and AUVs to track and inspect this cable. Magnetic sensors used for research can track these cables and collect data in the presence of sensor noise and ocean currents [16]. Navigationally, magnetic sensors can detect changes in the Earth’s magnetic field to determine location. Understanding how underwater drone sensing technology has developed over the years is important.
Acoustic and magnetic sensors have been used for navigation and data collection for many years. Thus, their evolution is integral to predicting the further trajectory of acoustic and magnetic sensing technology. This paper reviews the chiefly used underwater sensing technologies, with acoustics, magnetics, and information-gathering capabilities. It is also beneficial to review these technologies to anticipate the development of new sensors. This paper reviews the advancements in bionic sensors and their possible growth. Bionic sensors are a clever way of mimicking the sensory functions implemented by marine life to improve their ways of life underwater. Sensors can imitate seal whiskers and lateral line organs on fish to help in navigation. In the future, more research into a wider variety of bionic sensors would be a worthwhile venture. Developers and researchers can learn from the sensing organs of marine life to successfully navigate those depths with minimal to no light exposure and intense pressures.
References
- How much of the ocean has been explored?. How much of the ocean has been explored?: Ocean Exploration Facts: NOAA Office of Ocean Exploration and Research. (n.d.). https://oceanexplorer.noaa.gov/facts/explored.html.
- NASA. (n.d.). Ocean physics at NASA - NASA Science. NASA. https://science.nasa.gov/earth-science/focus-areas/climate-variability-and-change/ocean-physics/.
- I Mann, J. (2022, July 4). What is driving the demand for underwater drone detection?. Ship Technology. https://www.ship-technology.com/features/what-is-driving-the-demand-for-underwater-drone-detection/?cf-view.
- Heo, J., Kim, J. and Kwon, Y. (2017) Technology Development of Unmanned Underwater Vehicles (UUVs). Journal of Computer and Communications, 5, 28-35. [CrossRef]
- Xingxu Zhang, Jian Luo, Xiaobiao Shan, Tao Xie, Binghe Ma, Enhanced performance of bionic ciliary piezoelectric microsensor for hydrodynamic perception, International Journal of Mechanical Sciences, Volume 247,2023, 108187, ISSN0020- 7403. [CrossRef]
- Yang Cong, Changjun Gu, Tao Zhang, Yajun Gao, Underwater robot sensing technology: A survey, Fundamental Research, Volume 1, Issue 3, 2021, Pages 337-345, ISSN 2667- 3258, (https://www.sciencedir ect.com/science/article/pii/S2667325821000522). [CrossRef]
- Javier Neira, Cristhel Siros, Richard Huamani, Elfer Machaca, Paola Fonseca, Wilder Nina, “Review on Unmanned Underwater Robotics, Structure Designs, Materials, Sensors, Actuators, and Navigation Control”, Journal of Robotics, vol. 2021, Article ID 5542920, 26 pages, 2021. [CrossRef]
- Campagnaro, F.; Steinmetz, F.; Renner, B.-C. Survey on Low-Cost Underwater Sensor Networks: From Niche Applications to Everyday Use. J. Mar. Sci. Eng. 2023, 11, 125. [CrossRef]
- Sun K, Cui W, Chen C. Review of Underwater Sensing Technologies and Applications. Sensors. 2021; 21(23): 7849. [CrossRef]
- Luo H, Pan M, Du Q, Zhang Q, Hu J, Ding Z. Velocity-Related Magnetic Interference Compensation of Unmanned Underwater Vehicle. Remote Sensing. 2023; 15(17):4164. [CrossRef]
- Xiang X, Yu C, Niu Z, Zhang Q. Subsea Cable Tracking by Autonomous Underwater Vehicle with Magnetic Sensing Guidance. Sensors. 2016; 16(8):1335. [CrossRef]
- Y Eleftherakis D, Vicen-Bueno R. Sensors to Increase the Security of Underwater Communication Cables: A Review of Underwater Monitoring Sensors. Sensors. 2020; 20(3):737. [CrossRef]
- Siyuan Wang, Peng Xu, Xinyu Wang, Jiaxi Zheng, Xiangyu Liu, Jianhua Liu, Tianyu Chen, Hao Wang, Guangming Xie, Jin Tao, Minyi Xu, Underwater bionic whisker sensor based on triboelectric nanogenerator for passive vortex perception, Nano Energy, Volume 97, 2022, 107210, ISSN2211-2855. [CrossRef]
- Pu Y, Hang Z, Wang G, Hu H. Bionic Artificial Lateral Line Underwater Localization Based on the Neural Network Method. Applied Sciences. 2022; 12(14):7241. [CrossRef]
- Underwater Sensors: Marine and subsea sensors for ROV, AUV, and UUV. Unmanned Systems Technology. (2023, October 20). https://www.unmannedsystemstechnology.com/expo/underwater-sensors/.
- Yu, X. Xiang, L. Lapierre, and Q. Zhang, “Robust Magnetic Tracking of Subsea Cable by AUV in the Presence of Sensor Noise and Ocean Currents,” in IEEE Journal of Oceanic Engineering, vol. 43, no. 2, pp.311-322, April 2018. [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



